Embed Size (px)
DESCRIPTION
Quick Facts on Robots!
Citation preview

Topic: Types of Robots
Industrial Robots
Research Robots
Cornell Notes● a robot size of a person can carry can carry over
one hundred pounds and can move repeatedly of +/-0.006 inches
● 24/7 workers and in some type of application it can just be programmed once and no need to reprogram for another year
● robots’ tools and the cost of programming took up the major percentage of the cost
● industry usually buy a new robot if there’s a needed change in the programming
Fanuc is the largest maker of these type of robots in the world and they are almost always yellow.
● has six independent joints, aka six degrees of freedom, requires for six parameters, three for the location (e.g. x, y, z) and three for the orientation (e.g. roll, yaw, pitch)
● has two cylindrical pistons on the side of the robot that contains “anti-gravity” springs so these robots can carry heavy loads
● can weld, paint, and hand materials
Adept is America's largest robot company and the world's leading producer of SCARA (Selective Compliance Articulated Robot Arm) robots
● three joints in the horizontal plane that give it x-y positioning and orientation parallel to the plane
● a typical "pick and place" robot● with a vision system it can move products at a high
rate of speed
Cartesian Robot● allows x-y-z positioning● three linear joints for the three axes of motion and
define the x, y and z planes● can pick and place applications without orientation
Robotics Research Corporation of America produce a robot in 1988 for NASA
● redundant arms that has 7 joints, mounted on a torso with 3 joints, and 17 degrees of free moving space
● extra joints lets the robot to do tasks in many ways

Entertainment Robots
Bugs Robots
● good for testing the development of kinematic optimization algorithms.
ASIMO (Advanced Step in Innovative Mobility) by Honda
● 4 feet high and 26 degrees of free moving space● can move a lot like we do, back and forth● concentrated to be improved to help elders and
people in wheelchairs● often on tours to make young people excited about
science and engineering.
Doug Adkins and Ed Heller developed a robot at Sandia National Lab
● 1/4 cubic inch less than one pound● powered by three watch batteries● have a miniature camera, microphone,
communication device, and a chemical micro-sensor
● rides on track wheels consists of an 8K ROM processor, temperature sensor, and two motors that drive the wheels
Sarcos made a robot that utilizes pneumatic motors● 30 joints in a torso to support five branching chains● high-performance skins
Lucky, a robot dinosaur by Disney in 2003● pulls a flower cart that full of hidden batteries● has not figured-out the battery issue that plagues
mobile robots
KUKA Robotics, first robot with world-wide certification to handle human beings
● used in amusement parks as a type of roller coasters handling humans
● unrestricted freedom of motion and excellent dynamic performance
Furby, dog robot
Florida Robotics makes robots that can wander around at parties and play pre-recorded jingles or display scrolling messages to promote a company's products or distribute promotional literature
● capability to talk with on-lookers and can do things

Undersea Robots
Law Enforcement Robots
like sound effects, serves food, on-board video camera and transmitter, and lots of other things
● robot can send video of what he sees to remote monitor or video wall
● Rodney Brooks started with the bug robot idea● bugs are small, so in making bug robot, people
try to come up with techniques of how to build them than studying bug behaviors and ways to mimic them
BugBrain by Yost Engineering● big whiskers on the front of the bug lets it sense
contacts with things in the environment and can be programmed on-board for decisions on reactions
● can add additional sensors for bugs mimicking
Bug on Mars● more convenience in case of loses in bug robots,
there are still more left to explore● good for going through small openings
Schilling Robotics makes an undersea robot● thrusters for maneuvering, two robot arms for
manipulating● one arm is for grabbing a rigid object to steady itself
while its other arm is working (welding and valve maintenance)
Northeastern University Marine Science Center created a biomimetic (mimicking biology) lobster
● have myomorphic actuators, which mimic muscle action, and neuromorphic sensors, autonomous behaviors that are based on the actual animal's behavior
Australian Centre for Field Robotics at the University of Sydney developed a prototype for autonomous underwater robots (Oberon)
● may one day explore and monitor the Great Barrier Reef
● needed to be tied to the ship on the surface● has two scanning sonars, a depth sensor, and a
color camera● doesn’t need independent information (like global
positioning system satellites to know where it is)

Robots in Space
Robots in Radioactive Environments
(Nuclear)
Robots in Military
United Service Associates makes "Mad Robot," a robot that does look mad
● makes sudden and unpredictable movements in training scenarios for trainers to attempt a timely and appropriate response
● made of foam, vinyl and plastic● used as a mannequin target
Remotec Corporation made a Mini Andros● has all the features required for bomb disposing● has a camera coupled with a strong light● knobby tires and the tracks allows it to ride on rough
terrain capability● uses a sturdy manipulator on the front to pick up the
bomb and uses the mobility platform to move the bomb to a remote location
● activities are controlled by a remote operator
A surveillance robot● has a video camera and a light● small● the tracks let it to able to drive on all types of
terrains● good for finding suspects hiding in vents or drainage
pipes● controlled by a remote operator
Robonaut by Robot Systems Technology Branch at NASA's JSC in a collaborative effort with DARPA
● have dexterous five-fingered hand and human-scale arm
● have mix sensors of thermal, position, tactile, force and torque , with over 150 sensors per arm
● have nifty thermal suit to protect itself from temperature in space
Canadarm robot arm● flown on every Space Shuttle flight for the last
twenty years● arm has a shoulder with 2 DOF, an elbow with 1
DOF, and a 3 DOF wrist● the arm is used as a mobile work platform for the
astronauts to toss and retrieve satellites in space

Telerobotics
A robot was developed for the decontamination and dismantlement of nuclear weapons facilities
● has two six-degree of freedom Schilling arms mounted on a five-degree of freedom base
● it can hold a part in one hand and use a cutting tool with the other; basically stripping apart the reactor layer by layer (something like peeling an onion)
● as the robot works it too will become contaminated and radioactive and ultimately need to be stored as radioactive waste
The question of what to do with our radioactive waste is a hotly debated topic
Smart Crane Ammunition Transfer System being developed by the Robotics Research Corporation
● lets one soldier to be able to unload the entire truck without ever leaving the cab
● the system includes cameras, video screens, force sensors and special grippers
robotic mine-sweeper● a tractor with a bunch of swinging chains mounted
on the front and can pound the ground with significant forces to explode any buried mines
● Using GPS and relatively simple control algorithms, robots such as these can be programmed to methodically cover large areas of ground in a perfect grid
● can be equipped with water cutting tools to cut into and through explosive ordnance, water cannons to disperse unruly mobs and charge setters to explode suspicious packages
● this is operated with no one inside
Predator is our military's most famous unmanned vehicle
● super high-tech r/c plane though it does have some autonomous flying capabilities
● Originally designed for reconnaissance● can be outfitted with a variety of different weaponry,
most recently the laser-guided AGM-114 Hellfire anti-armor missiles
● 29 feet long with a 49 foot wingspan

Airborne Robots
Robot Expert Witnesses
Robot forward kinematics
Woods Hole Oceanographic Institution (WHOI) under ONR support made an underwater vehicle
● performs reconnaissance (hydrographic and side-scan sonar surveys) in littoral waters, from the seaward edge of the surf zone into waters as deep as 100 meters
● small, fit for two people● can operate over 20 hours on battery power before
recharging and is capable of speeds over 2.5 meters per second. It operates completely autonomously
Electric Motor● These electric motors provide the energy to feed
forces back to the operator.● These forces are proportional to the current in the
robot's motors which in turn are proportional to the forces being experienced by the robot
● hand/arm combination is mounted on a 3-DOF torso that extends the work volume of the manipulator system
● A 3-DOF head that holds a stereoscopic pair of TV viewing cameras is also mounted on the torso
● By stressing design principals of low mass, low friction, low backlash, high stiffness and good back-drivability, this system is capable of presenting sensations of contact, constrained motion, surface compliance and surface friction
UC Berkeley to develop an artificial fly● capable of fully autonomous flight and is designed
for reconnaissance, intelligence, surveillance and target acquisition by small military units
● The current model carries commercially available sensors
● The goal is to give the Silver Fox, which is also known as the Smart Warfighter Array of Reconfigurable Modules (SWARM), 24-hour endurance a 1,500-mile range and a maximum altitude of 10,000-feet
The robotics expert helps everyone understand the technical facts and aspects of the matter
● The intellectual property disputes typically involve patents and questions of infringement and validity.

Robot Inverse Kinematics
Motion control
Robot Vision
The liability suits can follow industrial accidents● Decision of the US Supreme Court from 1993 says
that an expert's testimony must be based on industry standards, peer-reviewed research or repeatable experimentation
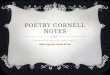
The robot has three links each of length l1-3. Three joints (the little circles) connect the three links of the robot. The angles at each of these joints are Ø1-3
● Denavit and Hartenberg used screw theory in the 1950's to show that the most compact representation of a general transformation between two robot joints required four parameters
● These are now known as the Denavit and Hartenberg parameters (D-H parameters) and they are the de-facto standard for describing a robot's geometry
a - the perpendicular distance between two joint axes measured along the mutual perpendicular. The mutual perpendicular is designated the x-axis.
a - the relative twist between two joint axes measured about the mutual perpendicular
d - the distance between the two perpendiculars measured along the joint axis
Q - joint angle about the z axis measured between the two perpendiculars
Transformation = Screwx(a, a)Screwz(d, Q) = Transx(a)Rotx(a)Transz(d)Rotz(Q)
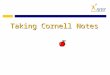
● The robot has one link of length l and one joint with angle Ø. The position of the robot's hand is Xhand.
● You may have to use your imagination a bit, but the schematic above is the planar part of the SCARA robot we discuss in the industrial robots section
● Most inverse kinematics solutions at the position level proceed in a similar fashion. You will use your knowledge of trigonometry and

geometry coupled with your creativity to devise a solution.
● Humans solve this problem all the time without even thinking about it. When you are eating your cereal in the morning you just reach out and grab your spoon. You don't think, "my shoulder needs to do this, my elbow needs to do that, etc."
What is servo control?" Imagine a simple motor. If you connect it to a battery, it will start spinning. If you connect two batteries, it will spin faster. Now imagine you tell the motor to turn precisely 180 degrees (1/2 revolution) and stay there no matter how many batteries there are. That's servo control
● As you eat, you become less and less hungry until you eventually stop eating. This is the idea of negative feedback. Imagine if the opposite were true and eating made you hungrier. You would eat until you exploded - out of control!
● Negative feedback in a servo control system proceeds in a similar fashion. There is a desired position for the motor and a feedback sensor that tells the motor it is not at the correct position
● Machine setup includes operations such as setting feed rates, setting offsets, setting limits and writing files. Similarly querying for feed rates, querying for offsets, querying for limits and reading files are important motion control operations.
● Sending motion start and motion stop commands are further examples of motion control operations. Querying for machine state is another example of an important motion control operation
If you're in an industrial setting using Machine Vision you will probably find an Adept robot at work. The company has spent many years interfacing their robots with vision based tools to allow for identification and assembly of parts
● One of the most fundamental tasks that vision is very useful for is the recognition of objects (be they machine parts, light bulbs, DVDs, or your next door neighbor!).
● Evolution Robotics introduced a significant

milestone in the near-realtime recognition of objects based on SIFT points.
● RoboRealm attempts to reduce the complexity of using machine vision in robotics by providing a comprehensive user interface to experiment with different vision filters
Summary
Robots are a useful benefit for us and today’s life. It can be launched into regions of space without having human going on there. They can even help practice military officers on their trainings, which requires shooting and good timely and appropriate reactions. It can carry bombs and move tons of heavy loads of work without getting tired. Engineers has been trying to improve robots even more, like improving a robot to help people in need or need special cares. Or on the contrary, robots can be used for fun and entertainments, like making itself a part of an amusement park rides. Though they might be useful, but there are some type of robots that produces waste and that waste needed to be stored somewhere. The answer is still being debated on, in the meanwhile, engineers are still working on for another complex robots.