Embed Size (px)
Citation preview

BOEING COMMERCIAL AIRPLANE COMPANY A-DIVISION OF THE BOEING COMPANY
SEATTLE WASHINGTON
TITLE
DOCUMENT NO D6-41h89
DESIGN OF A POWERED ELEVATOR CO=rT
FINAL REPORT
qVSPM -
MODEL
ISSUE NO TO (DATE)
NASA Contract NAS 2-7293
o
I0 -
gtAPPROVEDRL2Z
PREPARED BY
SUPERVISED B-(-
APPROVED BY
WLB t~Gende
sRHheman -shy
2--7
(DATE)
REV SYM
S M4 NO D6-41489
PAGE I
httpsntrsnasagovsearchjspR=19740007599 2020-03-23T124230+0000Z
-- -I-- PAGE--^OS-shyAD~eD P^ADDED l - --- O-fl z-7- 7 (Y )o uJ w u uj s
0jIJgt~gtO 0~ gt poundu )- 131 WLLi_ gt- gt_-ii - uan gt lt Y
(I re 0- n Ul 0-f LUj0D Ctan w o~
LX Z I 50 51
21 52 3 2 5453
- 55 5 566 57
7 58 8 59 9 60
10 Gi U 62 12 63 13 614 111 65 15 66 36 67 17 A 68 13 69 19 70 20 713 21 72 22 73 23 f4 214 7plusmn5 25 7plusmn6 26 77 27 78 28 79 29 80 30 81 31 82 32 83 33 84
314 85 35 86 36 87 31 08 8 89 -39 90 )0 A 91 ibull 92
J2 93 ~43 914 ) 4 95 452 96 )-G I97
- I shy-0- -090 6- lh
I i= J I _ -G shy
LIST OF AC-TIVE PAGES
ADDED PAGES ADDED PAGES
Z Z7 Z U U
100 101 102 103 iOh 105 106 107 108 1091o1
1i1 112 113 1114 115
117
It
100
iplusmn8 119 120 121 122 123 124 125 10
E uj W gt j w gt 1- 0 c
107i
REV $Y ca a N L
_ _ _ _ R E V ISIO N S _ _
REV f AE APPROVAL 5Th DESCRIPTION DATE ____
REV SYM sAFfAnc INa D6-41489 PAGE 3
TABLE OF CONTENTS
TABLE OF CONTENTS h
10 SUMMARY 5
LIST OF ILLUSTRATIONS 7
NOMENCLATURE 10
20 INTRODUCTION 12
30 AIRPLANE DESCRIPTION 1)
31 GENERAL FEATURES li
32 SPRING TAB ELEVATOR CONTROL PROBLEM 15
33 EXTENT OF MODIFICATIONS 16
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS 25
41 DESIGN REQUIREMENTS 25
42 DATA BASE 25
43 SYSTEM DESCRIPTION 27 44 PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS 30
50 ENGINEERING GROUND TESTS 57
60 TAXI AND FLIGHT TESTS 80
70 CONCLUSIONS AND RECOMMENDATIONS 117
REFERENCES 118
APPENDIX A - PILOT FLIGHT REPORT i0
REV SYM AD4rL0VW NO- D6-h1489
PAGE b
0
10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
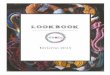
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

-- -I-- PAGE--^OS-shyAD~eD P^ADDED l - --- O-fl z-7- 7 (Y )o uJ w u uj s
0jIJgt~gtO 0~ gt poundu )- 131 WLLi_ gt- gt_-ii - uan gt lt Y
(I re 0- n Ul 0-f LUj0D Ctan w o~
LX Z I 50 51
21 52 3 2 5453
- 55 5 566 57
7 58 8 59 9 60
10 Gi U 62 12 63 13 614 111 65 15 66 36 67 17 A 68 13 69 19 70 20 713 21 72 22 73 23 f4 214 7plusmn5 25 7plusmn6 26 77 27 78 28 79 29 80 30 81 31 82 32 83 33 84
314 85 35 86 36 87 31 08 8 89 -39 90 )0 A 91 ibull 92
J2 93 ~43 914 ) 4 95 452 96 )-G I97
- I shy-0- -090 6- lh
I i= J I _ -G shy
LIST OF AC-TIVE PAGES
ADDED PAGES ADDED PAGES
Z Z7 Z U U
100 101 102 103 iOh 105 106 107 108 1091o1
1i1 112 113 1114 115
117
It
100
iplusmn8 119 120 121 122 123 124 125 10
E uj W gt j w gt 1- 0 c
107i
REV $Y ca a N L
_ _ _ _ R E V ISIO N S _ _
REV f AE APPROVAL 5Th DESCRIPTION DATE ____
REV SYM sAFfAnc INa D6-41489 PAGE 3
TABLE OF CONTENTS
TABLE OF CONTENTS h
10 SUMMARY 5
LIST OF ILLUSTRATIONS 7
NOMENCLATURE 10
20 INTRODUCTION 12
30 AIRPLANE DESCRIPTION 1)
31 GENERAL FEATURES li
32 SPRING TAB ELEVATOR CONTROL PROBLEM 15
33 EXTENT OF MODIFICATIONS 16
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS 25
41 DESIGN REQUIREMENTS 25
42 DATA BASE 25
43 SYSTEM DESCRIPTION 27 44 PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS 30
50 ENGINEERING GROUND TESTS 57
60 TAXI AND FLIGHT TESTS 80
70 CONCLUSIONS AND RECOMMENDATIONS 117
REFERENCES 118
APPENDIX A - PILOT FLIGHT REPORT i0
REV SYM AD4rL0VW NO- D6-h1489
PAGE b
0
10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

LIST OF AC-TIVE PAGES
ADDED PAGES ADDED PAGES
Z Z7 Z U U
100 101 102 103 iOh 105 106 107 108 1091o1
1i1 112 113 1114 115
117
It
100
iplusmn8 119 120 121 122 123 124 125 10
E uj W gt j w gt 1- 0 c
107i
REV $Y ca a N L
_ _ _ _ R E V ISIO N S _ _
REV f AE APPROVAL 5Th DESCRIPTION DATE ____
REV SYM sAFfAnc INa D6-41489 PAGE 3
TABLE OF CONTENTS
TABLE OF CONTENTS h
10 SUMMARY 5
LIST OF ILLUSTRATIONS 7
NOMENCLATURE 10
20 INTRODUCTION 12
30 AIRPLANE DESCRIPTION 1)
31 GENERAL FEATURES li
32 SPRING TAB ELEVATOR CONTROL PROBLEM 15
33 EXTENT OF MODIFICATIONS 16
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS 25
41 DESIGN REQUIREMENTS 25
42 DATA BASE 25
43 SYSTEM DESCRIPTION 27 44 PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS 30
50 ENGINEERING GROUND TESTS 57
60 TAXI AND FLIGHT TESTS 80
70 CONCLUSIONS AND RECOMMENDATIONS 117
REFERENCES 118
APPENDIX A - PILOT FLIGHT REPORT i0
REV SYM AD4rL0VW NO- D6-h1489
PAGE b
0
10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

_ _ _ _ R E V ISIO N S _ _
REV f AE APPROVAL 5Th DESCRIPTION DATE ____
REV SYM sAFfAnc INa D6-41489 PAGE 3
TABLE OF CONTENTS
TABLE OF CONTENTS h
10 SUMMARY 5
LIST OF ILLUSTRATIONS 7
NOMENCLATURE 10
20 INTRODUCTION 12
30 AIRPLANE DESCRIPTION 1)
31 GENERAL FEATURES li
32 SPRING TAB ELEVATOR CONTROL PROBLEM 15
33 EXTENT OF MODIFICATIONS 16
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS 25
41 DESIGN REQUIREMENTS 25
42 DATA BASE 25
43 SYSTEM DESCRIPTION 27 44 PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS 30
50 ENGINEERING GROUND TESTS 57
60 TAXI AND FLIGHT TESTS 80
70 CONCLUSIONS AND RECOMMENDATIONS 117
REFERENCES 118
APPENDIX A - PILOT FLIGHT REPORT i0
REV SYM AD4rL0VW NO- D6-h1489
PAGE b
0
10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

TABLE OF CONTENTS
TABLE OF CONTENTS h
10 SUMMARY 5
LIST OF ILLUSTRATIONS 7
NOMENCLATURE 10
20 INTRODUCTION 12
30 AIRPLANE DESCRIPTION 1)
31 GENERAL FEATURES li
32 SPRING TAB ELEVATOR CONTROL PROBLEM 15
33 EXTENT OF MODIFICATIONS 16
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS 25
41 DESIGN REQUIREMENTS 25
42 DATA BASE 25
43 SYSTEM DESCRIPTION 27 44 PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS 30
50 ENGINEERING GROUND TESTS 57
60 TAXI AND FLIGHT TESTS 80
70 CONCLUSIONS AND RECOMMENDATIONS 117
REFERENCES 118
APPENDIX A - PILOT FLIGHT REPORT i0
REV SYM AD4rL0VW NO- D6-h1489
PAGE b
0
10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

10 SUMMARY
In October 1972 The Boeing Company was ampvarded a contract by NASA
Ames Research Center that led to the desip fabrication and flight
testing of a powered elevator system for the Augmentor Wing Jet STOL
Research Aircraft (AWJSRA or Mod C-BA) The system replaces a
manual spring tab elevator control system that was unsatisfactory
in the STOL flight regime
Pitch control on the AWJSRA is by means of a single elevator control
surface The elevator is used for both maneuver and trim control
as the stabilizer is fixed A fully powerbd irreversible flight
control system powered by dual hydraulic sources was designed
The existing control columns and single mechanical cable system of
the AWJSRA have been retained as has been the basic elevator surface
except that the elevator spring tab is modifiedinto a geared
balance tab The control surface is directly actuated by a dual
tandem moving body actuator Control signals are transmitted from
the elevator aft quadrant to the actuatot by a linkage system that
includes a limited-authority series servo actuator Artificial feel
forces are provided by a dualized feel system that schedules the
feel gradient as a function of impact pressure Trim control is
obtained by shifting the neutral point of the feel system Manual
reversion control of the elevator is possible following the loss
of both hydraulic systems
The design was implemented on a government furnished C-8A tail
assembly at Boeing Seattle The modified tail assembly was subshy
sequently shipped to AMES RESEARCH CENTER for mating with the
AWJSRA airframe Following the functional and engineering ground
tests the AWJSRA was flight tested The powered elevator
control system has been demonstrated to be airworthy and to meet
its design requirements No adverse system characteristics were
noted by the test pilots Control problems encountered in the STOL
flight regime with the spring tab elevator system were eliminated
by the powered elevator installation
0
REV SYM SACZwvS NO D6-NOli8c PAGE 5
Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

Elevator deflection capability above 136 knots is higher than
desirable due to lower-than-predicted hinge moments This can
produce tail loads in excess of design loads The following
recommendations are therefore made
1 Pilots should be cautioned not to make large elevator
inputs above 120 knots
2 The powered elevator system should be flight tested with
the actuator supply pressure reduced to 1500 psi This
change should be permanently incorporated if system
performance is found acceptable
0
0
REV SYM ffA 7fC NO D6-h489 PAGE 6
LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

LIST OF ILLUSTRATIONS
Figure Title Page
20-1 PROGRAM SCHEDULE 13
31-1 THREE-VIEW DRAWING OF MOD C-BA 18
31-2 LATERAL CONTROL SYSTEM 19
31-3 DIRECTIONAL CONTROL SYSTEM 20
31-4 SPRING TAB ELEVATOR CONTROL SYSTEM 21
32-1 FEEL CHARACTERISTICS - SPRING TAB ELEVATOR SYSTEM 22
32-2 ELEVATOR FLOAT ANGLE - SPRING TAB ELEVATOR SYSTEM 23
32-3 ELEVATOR DYNAMICS - SPRING TAB ELEVATOR SYSTEM 24
42-1 TAB - ELEVATOR EFFECTIVENESS RATIO 33
42-2 PREDICTED ELEVATOR HINGE MOMENT COEFFICIENT 34
h2-3 ELEVATOR PER G CHARACTERISTIC
43-1 ELEVATOR SURFACE CONFIGURATION
43-2 LONGITUDINAL CONTROL SYSTEM SCHEMATIC
43-3 CONTROL COLUMN INSTALLATION
43-4 CONTROL LINKAGE
43-5 ACTUATOR INSTALLATION
43-6 LINKAGE INSTALLATION
)43-7 ACTUATOR SCHEMATIC
43-8 FEEL COMPUTER
43-9 FEEL CONTROL UNIT
43-10 TRIM TAB CONTROL SYSTEM
43-11 HYDRAULIC SYSTEM SCHEMATIC
41 PREDICTED ELEVATOR TO TRIM
4-2 PREDICTED ELEVATOR BLOWDOWN
44-3 PREDICTED FEEL FORCE CHARACTERISTICS
44-4 PREDICTED PCU OPERATING CHARACTERISTICS
44-5 PREDICTED PCU OPERATING CHARACTERISTICS
35
36
37
38
39
4o
41
42
h3
4h
h5
h6
147
48
49
- DUAL HYD 50
- SINGLE HYD 51
44-6 PREDICTED ELEVATOR MANEUVER CONTROL VERSUS TRIM 52
44-7 PREDICTED TRIM RUNAWAY OVERRIDE FORCES 53
114-8 PREDICTED HYDRAULIC DISCONNECT 0 TRANSIENT 54
REV SYM AffA74WWr NO D6-41489 P AGE 7
44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

44-9 PREDICTED HYDRAULIC DISCONNECT FORCE TRANSIENT 55
44-1o PREDICTED MANUAL REVERSION FORCES 56
50-1 EMPENNAGE GROUND TEST SET-UP 63
52-1 ELEVATOR - COLUMN GEARING 64
52-2 PREDICTED ELEVATOR AUTHORITY 65
52-3 GEARED TAB VS ELEVATOR DEFLECTION 66
52-4 FEEL CHARACTERISTICS - 0 KINOTS 67 6852-5 FEEL CHARACTERISTICS - 60 KNOTS
52-6 FEEL CHARACTERISTICS - 90 KNOTS 69
70
71
52-T FEEL CHARACTERISTICS - 120 KNOTS
52-8 FEEL CHARACTERISTICS - 160 KNOTS
52-9 BREAKOUT FORCES VERSUS AIRSPEED 72
52-10 FEEL GRADIENT 73
52-11 FEEL PRESSURE - ACOMPUTER 74
52-12 FEEL PRESSURE - B COMPUTER 75
52-13 FEEL COMPUTER RESPONSE 76
52-1ih SAS SERVO AUTHORITY 77
52-15 ELEVATOR PCU FREQUENCY RESPONSE - DUAL HYD 78
52-16 ELEVATOR PCU FREQUENCY RESPONSE - SINGLE HYD 79
61-i FLUTTER INSTRUMENTATION 91
61-2 EMPENNAGE RESPONSE TO RUDDER KICK 92
61-3 EMPENNAGE RESPONSE TO ELEVATOR KICK 93
62-1 GROSS WEIGHT - CG SCHEDULE 94
62-2 ELEVATOR TO TRIM 95
62-3 TAKEOFF ROTATION 96
62-4 PITCH ATTITUDE CHANGE - 120 KNOTS 97
62-5 PITCH ATTITUDE CHANGE - 6o KNOTS 98
62-6 STOL LANDING 99
62-7 ELEVATOR MANEUVER REQUIREMENTS 100
62-8 ELEVATOR PER G 101
62-9 ELEVATOR HINGE MOMENT COEFFICIENT 102
62-10 ELEVATOR BLOWDOWN 103
62-11 HORIZONTAL TAIL LOADS 10h
o 62-12 ELEVATOR - COLUMN GEARING 105
ncjrA nc NO D6-h )489REV SYM PAGE A
10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

10662-13 GEARED TAB VERSUS ELEVATOR
107
62-15 FEEL CHARACTERISTICS 1o8
62-16 FEEL CHARACTERISTICS
62-14 FEEL CHARACTERISTICS
109
11062-17 CALCULATED FEEL FORCES
ii62-18 FEEL PRESSURES - A COMPUTER
62-19 FEEL PRESSURES - B COMPUTER 112
62-20 CONTROL SYSTEM DYNAMICS 113
11462-21 HYDRAULIC DISCONNECT FORCE TRANSIENTS
62-22 MANUAL REVERSION FORCES 115
11662-23 STEADY SIDESLIP
AWAFiAJ WAP Jdeg D)6-1489 -REV SYM IrPAGE 9
NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

NOMENCLATURE
AWJSRA -- Augmentor Wing Jet STOL Research Aircraft
C -- Elevator hinge moment coefficient
CHedt acHe dt elevator hinge moment coefficient variation
with geared tab deflection
FpF s -- Column force
GS - Glide slope
h -- Altitude
-- Horizontal tail lift
-- Horizontal tail bending moment 25 MAC
- Higr pressure engine shaft speed
n--z normal load factor
PCU -- Power control unit
PLF -- Power for level flight
PIO -- Pilot induced oscillation
qc -- impact pressure
SAS - Stability augmentation system
V -- Design maneuvering speed
V B
-- Design speed for maximum gust intensity
Vc - Design cruise speed
V -- Design dive speed
Ve -- Equivalent airspeed
Vf-- Design flap speed
-- Sideslip angle
-- Flight path angle 0
REV SYM SOSIfAI NO D6- h489 PAGE 10
6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

6-- Column position
de -- Elevator position
d -- Flap position
dNy -- Pegasus nozzle position
-- Rudder position
-- Geared balance tab position
4T-- Trim tab position
REV SYM BArXY AVAG NO D6-414 89
IPAGE 11
20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

20 INTRODUCTION
In October 1972 The Boeing Company was awarded Contract NAS2-7293
to design a powered elevator control system for the Augmentor Wing
Jet STOL Research Airplane (AWJSRA) The contract included
component fabrication refurbishment and modification of a
government-furnished tail assembly
The contract was subsequently enlarged to cover installation of
the modified tail assembly and related components on the AWJSRA
as well as ground and flight testing to verify airworthiness of
the powered elevator installation
This document summarizes the modification program for the powered
elevator system The schedule and significant milestones of the
program are summarized in figure 1
REV SYM AFfAVAP INo D6-s1h89 IPAGE 12
0
gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

gt gti
1972 1373 CT I NOV I DEC AN FEB IMARIAPR I MAY IJNE iJ0LY1 AUampISEP IOcrI
CONTRACT AWED Q R o S VV V
SYSTEM DESIGN ltPT
EMPEWHASS
4 REFVURI31SENT rAD) - AND ASSEfBampY
l AJRCR Ar i r-DIIC[])ts wzampmom-o
GROUlN TEsT FnE FRR
TAXI AND FLIGHT rasr
OR - DESIGN REVIeW
rj ~Sit - SAFEY REVIEW
FT - FUNCTIONAL TEST
FRR -FLIGHT READINESS WEVIEh
p a
wo4)
30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

30 AIRPLANE DESCRIPTION
31 GENERAL FEATURES
The AWJSRA is a 45000 pound 50 psf wing loading turbo-fan
powered airplane designed for research in the STOL terminal
flight regime The airplane is derived from a deHavilland C-SA
Buffalo airframe Augmentor-wing jet flaps blown and drooped
ailerons and leading edge slats have been added to produce high
lift capability for STOL research Wing span has been shortened
to increase wing loading Two Rolls Royce Spey 801SF jet engines
provide blowing air to the flaps and ailercns-via ducts as well as
direct hotthrust through vectorable Pegasus nozzles A three view
of the airplane is shown in figure 31-1 Airplane operational
data are presented in table 3-1
The AWJSRA has two independent equal capacity 3000 psi hydraulic
systems using MIL-1-5606 fluid The electrical system is powered
by two engine driven 115200 volt three jhase 400 Hz brushless
generators that are connected to normally isolated left and right
ac busses and through rectifiers to the left-and tight dc
busses A 24 Voltbattery is connected tothe left dc bus
Lateral control is achieved through threb control surfaces
ailerons spoilers and outboard flap augmentor chokes each conshy
tributing approximately a third of the roll control The control
surfaces are fully powered Spoilers and chokes have single
hydraulic sources the ailerons are poweredbY dual hydraulics
A limited authority series SAS actuator Ss included in the lateral
axis Manual reversion control of the atlerons is possible folshy
lowing the loss of both hydraulic systems The lateral control
system is shown in figure 31-2
Directional control is via a single doublehinged rudder The
surface is fully powered by a dual tandem actuator A limited
REV SYM soaf no D6-41489
PAGE II shy
authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

authority series SAS actuator is included in the directional axis
No manual reversion is possible Figure 31-3 shows the directional
control system
Longitudinal control is via a single elevitor surface which provides
both maneuver and trim control functions as-the stabilizer incidence
is fixed Prior to the powered elevator modification longitudinal
control was entirely manual A spring tab on the right side of the
elevator was used to reduce stick forces A tab on the left side
manually operated by the pilot and automatically by a flap-trim
interconnect was used for trimming The manual elevator control
system is shown in figure 31-4
32 ELEVATOR CONTROL PROBLEM
The AWJSRA was flown by Boeing and NASA-ARC 67 times with the manual
spring tab elevator control system Certain shortcomings of this
system below 80 knots became almost immediately apparent -
Maximum elevator deflection was not possible without extremely
high stick forces Stick forces in excess of 100 pounds were
required for full elevator deflection at 60 knots as shown in
figure 32-1 The elevator up float angle (igure 32-2) changed
considerably below 80 knots due to mass and aerodynamic overbalance
effects This had an adverse effect on control feel and airplane
response The elevator dynamic response was poor Figure 32-3
shows elevator position to lag pilot force by approximately 130 degrees
at 05 Hz This high control system phase lag made tight attitude
control extremely difficult
These shortcomings of the manual elevator control system had a
detrimental effect on the evaluation of the AWJSRA in the STOL
regime and led to the design of a fully powered elevator control
system
1GE 1
REV SYM A4WW AG PGEoD6-41489
EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

EXTENT OF MODIFICATION33
Airplane modifications made to incorporate the powered elevator
system were as follows
1 A dual tandem moving body power control unit which directly
powers the elevator surface was installed in the horizontal
stabilizer
2 The elevator spring tab was replaced by-a geared
balance tab with ratio 6tde = -07
3 The flap-trim tab interconnect was deleted
4 A feel system was located in the vertical stabilizer to
provide pilot feel forces
5 An electric trim motor that moves the neutral point of
the feel system was installed
6 The hydraulic system was modified to provide the power to
the elevator PCU feel system and SAS actuator
7 Structural modifications were made to the vertical
and horizontal stabilizers as well as to the forward
segment of the rudder surface
V NO D -l 8REV SYM 0 1REV SYMSOSCASPAGE
2
TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

TABLE 3-1 OPERATIONAL DATA-
I PLACARDS
DESIGN FLAP SPEEDS PLAPS UP DESIGN SPEEDS
Vf KnotsF
750 90 Gust VB i4lh0 knots
500 90 Maneuvering VA - 136
300 120 Design Cruise VC = VMO - 160
56(UP) 166 Design Dive Speed - 180
DESIGN LOADS --MAXIMUM ALTITUDE
Flaps down 0 g nZ lt 20 g 159000 feet
FlaPs up (56deg) -5 g nz lt2-25 g - - --shy9-
FLIGHT RULES
- FR -o
I TYPICAL DESIGN FLIGHT CONDITIONS
TAKEOFF
4F lt33 )= 60 Ve 75_ktsb= 150 (2 engines takeoff power 45o000 ibs)
CRUISE
F=up7)= 60 ve 140 to 160 kts Y= 0
LANlDING
=F 650 9= 700 Ve = 60 kts V= -750 35Zargin
VtVargin 16 kts
REV SY1A A flr2 IoD 6 -11489 I
0
Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

Conical Nozzles _ i o i
SpolRoy e Spey Engies
s
Nose Boom
Instrumenttion Back
Fixed LE Slats
BLC Aileron
-
Spoiler - Augn6tor Flaps
Trim Tab for
~Powered
Geared Tab
evator
bull
C
REV SYM ftC
iG 31-F
1AGE 18-+8
A700
IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125

IiUaR- QOYAxmOL
tMCO~aa~-~~S14EAR OUTS
P04CMO ~ CENTERING VI QskNLp)4 1KM UNIT i LAiEtAL
Ca VAL-V r
SOL- AcruA To O o$to
0~SY IND~A
H jz-lit 1VLW _-A S-mso 7
N- NOTE)VM4 at~~~t-yg~~~~OLRrt 4Z OVCs~ V Lrr
15-04
01 4100 fl4o 0flIOZ7
M STJ SmWf~ SWww
CO U
CAM
NONOTE
aE tc to NT RKtO
-C -TABlSPRMMELEVATOR CONTROL SYSTEM
TA6 PUSH-PULL ROD
TAIIJIF
0PIE25rlr IK
INSTRUUENT PANEL
NEUTRAL POSITION
PLOVS CONTROL COLUM
TURNBUICKLIS
- Cv RicAL An) P - -
PUSH-PULL ROD rt
0 ELEVATOR
CoLtWOLSO VORWARO QUAORANT (nCOCKPrr)
C r o c I-1mt-l l -- co
Pull 0imit IJ 60
Stick force Fs lb 40
TE up
15 10 05 10 -15 -20
-40
0 a TE down co 40ktVe
30
4- -60
-80
Spring tab angle SYdeg 20 1
-120 -o-140
10
TE up
15 10 180_ b -5 10 Is -20 1401150
00120Incremental elvaor deflxtjon from trim AS den
60- 80
40
0 PrGORE 32-1 -STICK FORCE AND TAR EFFECTIVENESS BASED ON
TAXI AND FLIGHT TESTING 0
SPRING TAB ELEVATOR CONTROL SYSTEM
SOffAAWS No D6-1sIh89
PAGE 22 REV SYM
[ otcst-5 J u e Trn tab at Zeto (brt +05 )
-25 - Mass balance requires F =-40 lb
to neutralize elevator at Ve =0 kt e Flaps tip
080 kt tamd run-20
A 60 kt tax run
Elevator angle 8e deg -15
-10
-b
Acceleration
0 I 0 20 40 60 so 100
Airspeed V ktTE down
20
10-
Spring tab angle 6tY deg 001 20 40 60
- Airspeed Ve kt
I -10
C Static pomition
-2-
Fi6uRE 32-2 -ELEVATOR FLOA TAT ZERO STICK FORCE DURING TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
REV SYM SNA4fZlAC No D6-hih89 IPAGE 23
D1 4100 7740 ORIG371 J15047
rn
IRIG 112143-1t2153 Flaps up zero trim tab
1-sec
5shypositon
6col deg 0
5
100 Pull
Fs lb
50
0~
Stick force
-50 10
o0
m
-o i -
5e ede
tMdeg
2 0
-10
-20 -
-25 TE up
20
10 -angle 0
Deatior
ange
Saturated tab input
Spring tab
- I_ ii I
a- -10
FIGURE 32-3 -ELEVATOR D YNAMICS A T 60 KT TAXI
SPRING TAB ELEVATOR CONTROL SYSTEM
40 POWERED ELEVATOR SYSTEM DESIGN AND ANALYSIS
41 DESIGN REQUIREMENTS
The powered elevator system has been designed to comply with the
intent of the Federal Aviation Regulations Part 25 except for
deviations with respect to mechanical failure conditions These
deviations were considered acceptable for a research airplane
This allowed use of the existing single load path cable system
and the single control surface and thereby minimized the cost of
the modification
Specific design requirements which determined the system
configuration are as follows
1 The powered elevator system shall provide stick forces
compatible with one hand operation I
2 Loss of one hydraulic system shall not cause unsafe stick
force per g characteristics
3 Elevator manual reversion shall be available for safe flight
to a landing
4 The control system shall be capable of accepting series
SAS commands
5 The control system shall be safely operable over the total
flight envelope of the AWJSRA
42 DATA BASE
The data base for the design of a powered tlevator control system
came from actual flight test results of the airplane from the
original DHC Buffalo and from a piloted simulator study done at
NASA-Ames in May 1971 (reference 1)
A fundamental assumption was that the existing elevator control 0
surface had sufficient control power to meet maneuver and trim
0
REV SYM nAPrZcAK No D6-41489 PAGE 25
requirements throughout the flight envelope This was in fact
verified by flight test and therefore allowe4 use of the existing
control surface
Elevator hinge moment data was generated by combining the tab
elevator effectiveness ratio (figure 42-1) obtained from Boeing
flight test results with the tab hinge monent coefficient CHe4
of the basic Buffalo A linear coefficient was assumed for tab
deflections below 10 degrees Elevator hinge moment data for
deflections greater than 15 degrees were estimated from stick force
data of the spring tab control system with he tab stops contracted
Figure 42-2 shows the estimated elevator hinge moment coefficient
with zero tab deflection as well as the coefficient for the proposed
surface configuration
The elevator per g characteristic used in the calculations is
shown in figure 42-3 This characteristic is basically unchanged
from the existing configuration and therefore requires the same
airplane gross weight - cg schedule to be maintained as with
the manual elevator control system
The piloted simulator study was used to evaluate handling quality
improvements with a powered elevator as well as to determine basic
system parameters such as elevatorcolumn gearing minimum elevator
surface rates SAS authority trim rates Major simulator results
were as follows
1 A 30 degree per second elevator rate is a minimum acceptable
lower level
2 At the approach condition a linear gradient with 30 pounds
stick force at maximum column deflection results in good
control feel (This was later revised to 40 pounds at
maximum deflection)
PAE2
A 7AWZAVA NoGD6-41489REV SYM
3 A flap trim interconnect is not-necessary (This was also
confirmed by pilot opinion in a flight test ofthe airplane
prior to the powered elevator modification)
4 An elevator trim rate of 2 degrees elevator per second
represents an acceptable compromise between high speed
and low speed trim rate requirements
5 A control system gearing of -328 degrees elevator per inch
of column deflection is satisfactory although -4 was preferred
A gearing above -5 tended to cause PIOs especially with flaps
up
6 A SAS authority of +5 degrees elevator iepresents a
satisfactory lower limit in the STOL flight regime
43 POWERED ELEVATOR SYSTEM DESCRIPTION
Pitch control on the AWJSRA is by means of a single elevator control
surface located on a fixed stabilizer No load elevator position
limits are +15 degrees -25 degrees The elevator surface (figure
43-1) includes a full time geared tab with a balance ratio
dt e = -07 as well as a trim tab used during manual reversion
The longitudinal control system schematic pounds shown in 43-2 Pilot
and copilot signals are transmitted by a single cable run from dual
control columns (figure 43-3) to the aft elevator control quadrant
in the vertical stabilizer The control columns and cable run are
essentially unchanged from the basic C-8A with the exception of
twq bias springs connected to the control column torque tube to
counter the column mass unbalance in the vertical direction From
the aft quadrant the pilot signals are transmitted to a dual
tandem moving body power control unit diractly connected to the
elevator surface With one or two hydraulip systems operable the
PCU is irreversible and positions the elevator in response to pilot
commands The control system becomes reversible following the loss
of both hydraulic systems Elevator control for this condition is through a slop link in parallel with the PCU
REV SYM scAns NO D6-41489 PAGE 27
The control linkage between the aft quadrant and the elevator PCU
is non-redundant It includes a limited authority series SAS
actuator originally designed by Moog for the F-4 and subsequently
modified for the AWJSRA application The actuator includes a
mechanical locking device that centers andlocks the actuator
when hydraulic power is lost or shut off The control linkage
and actuator installations are shown in detail in figures 43-4 and
h3-5 A picture of the actual installation is shown in figure 43-6
The elevator power control unit is a modified Grumman Gulfstream II
elevatoraileron actuator The actuator wa one of several existing
actuators investigated during the preliminary design phase New
actuators were not considered due to cost and schedule limitations
The actuator is a dual tandem moving-body type as shown in
figure 43-7 Actuator modifications consisted of a new flow control
valve and a strengthened head end output rod
The installation has several noteworthy featnres The actuator is
specifically installed in a horizontal position to sense only
motion in the fore-aft direction The actuator input is thereby
effectively decoupled from vertical deflecticns of the elevator
hinge line These represent a spurious input and can cause
instability particularly where high struefural feedback is used
The actuator and its input linkage (links I and 2) are mounted in
and hence referenced to the horizontal stabilizer while pilot
signals transmitted by bellcrank 4 are referenced to the rear
spar of the vertical stabilizer Relative motion between the
horizontal and vertical stabilizers could therefore induce inputs
to the actuator Thd horizontal pushrod (link 3) was therefore
included to decouple the actuator from relative motion in the
vertical plane Structural feedback for actuator stability is
obtained by mounting the input lever 2 on the vertical swing link 5
Deflections of the actuator support structure are thereby fed Z o back to the valve in a stabilizing sense
IPGE 2
REV SYM AUFLAWA7 [No D6-41489 shy
2
Xpilot
REV SYM
Pilot feel during powered operation is provided by a variable
gradient feel system The feel system comprises a feel computer
figure 43-8 and a feel control unit figure 43-9 Both units
are modified 727 components The feel computer generates hydraulic
pressure proportional to impact pressure as sensed by a pitot probe
in the leading edge of the vertical stabilizer The control unit
utilizes the hydraulic feel pressure in conjunction with a fixed
mechanical spring gradient to produce the aplusmntificial feel force
The hydraulic feel force generation is completely dualized A difshy
ferential pressure switch in the feel computer monitors the two
feel pressure computations and generates a warning signal if a
significant difference exists
The feel system is connected to the aft elevator control quadrant
via a preloaded spring push-pull rod (pogo) This pogo allows feel
system overtravel during an out-of-trim condition as well as
permitting elevator control with a Jammed feel system
During manual reversion pilot stick force is the sum of the
aerodynamic forces actuator and control system friction and
damping forces and the feel system mechanical gradient
Pilot trim during powered operation is accomplished by shifting
the neutral point of the feel system and hence the control system
Trim authority is +9 -14 degrees elevator vith a trim rate of
2 degreessecond Trim authority is fixed for all flight conditions
Trim control is electrical ony Powered trim indication is via
the elevator surface position indicator
Trim control during manual reversion is via a tab on the elevator
surface The trim tab control system is shown in figure h3-10
Pilot control of the trim tab is mechanical enly A locking and
indexing feature on the trim wheel prevents inadvertent mistrim
during powered operation Positive action is required by the
to unlock the trim wheel and allow its use for manual
reversion trim
4Armn INO p6-)0-4109 PAGE 29
0
0
Hydraulic power for the elevator control ystem is supplied by
hydraulic systems A and B The elevatcr PCU and feel system are
supplied by both A and B systems the SAS servo by system A
only Supply pressure to the elevator PCU is reduced to 2440 psi
A relief valve and a low pressure warning switch provide protection
against overpressure and underpressure The hydraulic system
schematic is shown in figure 43-11
h PREDICTED LONGITUDINAL CONTROL CHARACTERISTICS
Elevator trim requirements for 1 g flight are shown in figure 44-1
No trim change due to the powered elevator modificationwas predicted
Available elevator deflection during powered operation is shown on
figure 44-2 Elevator deflection is limited-at higher airspeeds
by actuator blowdown With both hydraulic systems operating blow
down from -25 degrees elevator starts at 100 knots and from
+15 degrees at 118 knots The 100 knot blow down speed allows
maximum elevator deflection at the STOL approach speed with on
hydraulic system lost as well as for dual hydraulics with loss
of the geared tab
Feel force characteristics excluding friction are shown in
figure i-3 The feel system provides a nearly constant 42 lbsg
for all flight conditions The feel gradient is reduced by the pogo
between the elevator aft quadrant and the feel control unit for
force levels greater than 37Tpounds column force
The elevator power control unit has a no-lead time constant of
h second and a maximum no-load rate of 55 degreessecond Both
of these parameters are load sensitive and hence will vary with
elevator position and airspeed as shown on fagure 44- and
figure 4)4-5 Load effects at all trim conditions are small
enough to ensure satisfactory PCU performance
0
The control system is designed for a maximum SAS authority of
+ 3 degree elevator deflection This SAS authority is a varying
PAE3
REV SYM AV901 AfjW No D6-414893
2at
REV SYM
percentage of pilot authority The worst case occurs with trim
at the maximum aircraft nose down trim limit (+9 degrees elevator)
where +8 degrees SAS authority is equivalent to 10 percent pilot
authority in the aircraft nose down directi6n (figure 44-6) A
SAS hardover at this condition in the aircraft nose up direction
will require SAS disconnect rather than override
The power control unit input lever travel rapability is limited
to + 2 degrees elevator deflection to minimize the amount of lost
motion in the control system during the manual reversion mode
This however produces an undesirable effect during SAS operation
where the SAS actuator can backdrive the column + 350C if the
pilot and the SAS both command maximum elevator in the same direction
This can be avoided during normal operation by automatically reducing
the SAS command to zero as the pilot input approaches the maximum
Trim control is electrical only with no redundancy or mechanical
backup Trim runaways tre a possibility therefore and must be
countered by a corresponding pilot force The force required to
maintain airplane trim due to a maximum trim -runawayat any one
flight condition is shown on figure 44-7 -Also shown is the force
required for maximum elevator deflection with the most adverse
trim runaway
Manual reversion is automatically provided followingthe loss of
both hydraulic systems Airplane controllability during manual
reversion covers three stages
1 Hydraulic power onoff transient
2 Trim control
3 Maneuver control
Following the loss of two hydraulic systems the elevator surface
will automatically float to -4 degrees Ifthe airplane is not
a flight condition that requires -4 degrees trim then a maneuver
wll result The magnitude of the maneuver is dependent on the
-6hl4AOffWor V0 NO T
PAGE 3
difference between elevator float point and elevator trim prior
to hydraulic power loss The load factor transient for various
conditions is shown on figure 44-8 while pilot force required to prevent this transient is shown on figure 44-9 Because of the
magnitude of the possible transients it is important that the
pilot divert to 90 knots flaps 30 as soon as possible if complete
loss of hydraulic power can occur with Qne additional failure
Trim for hands-off flight during manual reversion is possible
through the existing trim tab Trim control is only mechanical
through the trim wheel Authority is limited to + 105 degrees
elevator
Maneuver control forces are considerably higher than in the powered
mode Aerodynamic loads are shown on figure 44-10 Control
system friction damping and the feel sygtem centering spring will
further increase the manual reversion loads
The powered elevator system was analyzed to assure a flutter free
design In addition to the normal operating condition certain
failure cases were also investigated These were
1 One and two hydraulic system failures
2 Geared balance tab rod failure
The analysis showed the elevator system to be flutter-free for
all conditions investigated
REV SYM ffd eL-AV No D641489
- PAGE 32 shy
IT
JJ
- 1
tt t
p bull
fL i I -T
II i--IshyI-1
V 2IT
shy
i
33IaPAGE
- i
L li I
1--9
H13--1
r t LV IIL
I
I I
PA
G31 Al
e l
N
D6
-44
89
REV
-SYM
I I ]
11--Iamp
l-- I I F- shy JM IJ LL~TI~LrL -i L
n- --- - - -- - shy -
-- i-- _ N i Ii IIIl4
ii 1i l - - I_ - -l ]
I- -
F 4--r shy
]Ili--e
l I --shy
ll -I
l l
7pound _
1-0_--- LT
L I I I
bull FIue 442-3
REV SYM -AMMpAGENO D6-44893
-0F 7- - -r
I ii L Tr 4+Ishy[I f ampL r Tf F
- 4- Ar
o I
II 4 I F
-0shy
f-ti
I - I- - - - - -- 777
IT i ---shy
i [ i i _1_ 1 ]__1 I Ji1I111i I IJ I I I II I
g I_ _L I JJ _ I I _ I L-I__1 L I I I ___LJI __L_II I 121I
REVSYM SfIAIl NO D6-hlh89
PAGE 36
ELEVATORLPOWERED SYSTEMCONTROL
pound r om T
FiRETR-shy
-40shy
m - nS AL A T
|onrao zaL UMY
i 12 7
- - --
-- - - r- --- IiC
- --
It U
F--shy
x$1gtKxt4G Ei -OR-NAshy
-r
I10I 9 I I 7 1
~ I -IltPitu2
I -I
AltlllII -~~~
uA4054-85Y shy
UM
~~~5 (23m (
17
eM 1olZS7
-~~~~~~~~~IN - --
L -
IIG
ooTabal-ne
I jF
-
41II 2 4m
INT-3 J
IOOU M AUI4
7744
tI IN
-s II
M-
-it
shy
itt
I--
C -
4
-
-
6
J1f l
lZ t
r4 Tr
4 2
-4r
71
4 BELLOWS PRELOAD ADJUSTMENT
4IO POT
STATIC PORTS
ADJUSTABLE STOP
RELIEF VALVE
FORCE BALAONCESLIDE VA- E bull -
DAMPING ORIFICE
NEGATIVE PRELOADCHKVAE VALVE SPRING
H Y OR AU L IC HO U S ING -- _ --
FILTER - SYSTEM 9 PESStIE
sy T~ arRiir-uRASYSTEM A- RIEGULATED PRESSUIRE
SYSTEM B REGULATED PRSSURE SYSTEM A RETURN
SYSTEM RETURN - D IF FERENTIAL PRESSURE
X- SWITCH H4OUSING
_______-_ CO MPUT ER UNtT S CHEMAT IC
CC ICALCIflUYOZIIDAW
Coo4 Prne - cet Psrr7r 7 p AMO
THE 5OEING COMPANY
E WH4 D-1ON D6-41489
----
II
INPU
rgEL P --
AECENTE-AoG CAM t
AACTUAT6R ampL4DRA3-TACTUAT6RT Q
j7--7 CAMxR4CC- S -eO
RESMMVr-V7Io 6448
i AW 4
0
rn
01 4100 7740 ORI371
TAP DOWM 101IN IiVTP AL
J IM-6O47
1FLVATaR TRIM AB SYSTEM
MANUAL RANCE
NOMINAL TAB RAN695 OF MO MENT
IDLER A 7 M T45
ELEVAIO-PMEEAO POU RD
R00 STABILIZE
P05)PULL
I3I P00lTAL
I00flWAPJ) CABLE D~kLJM
__________________
4 - - 3 - 3
~t
~33~34C
33
S 3 3333li 3 -
3 33
3 3j~j
3
~33
3
33 43~33
33 3
(33
3 3
~4333 -~
3 3 3
13
3~
-3 3
3 3
4
3
3 3
3
3
~
33
0 p I
33~
3
-
-
3
r I
3 W3
-3 ______ ______ - 3poundshy
r - _______________Kt -I1 3~ 3 Cl- -I
- ~A tampAID 333 33--j
c S t13
F C3
3 S
3
LI
1_____ 3
_________________________________________________________ 3
1 3 3 3 3
3 3
4I343
1 ____
I3 3~ -3
3 I 33 3 3 rn-atr 3
3
3 3 3 3 33 33 33 33 3 t c-
33 3 33 3 3 I
3 3 33
3~3 3 3 3 - 3 3 ~J4t3(33333S 3
333 -~ 40 MS 33 3 3 - I~~it 3
333 3 --3--~ -shy3 3
33333 331 3 3 3 333 3 3
3 3I ~ -iA 3 - 3 - I
I I ~ A
) 3333 3 3
r 3 C2 333 333333 3333-33433-3333 3 3fl - 333333333333333333~-3 -- shy33 33333 --t3 33333
I I 4 3 II 7Z IL
r
I -I I
I I I-_
_ _ _ __ _ _ I___ _ _____I-________ I
1 I - - I _______-__- _ ml= 4 I
alT~ l I [ z f -- - I I-I
1 - I I I _JT shy
s 3N 1
0
o F $447
I4 1--II i
t
[I I I i 1 4-
I7 2 r1 4-
I-P
reg
p i 2L5h 7 2
NC D6-h14t89 REV SYM
o
PAGE 4~7
I7 i
- - T J II - ~ - r
I - I
-1
t
-
shy
_IjI-
IN-~ -
II
I
-1
ii
I
I
i
-TA
I- r u
Itr
4L I I
loIII
1111411I II
f i 1
4~~~~IT I
111 I
~
I
II
I T
l 41- -
T rpL
IL
I
II~ I il III[II
11 1111 I
1
rf I IIi1111
II I
- Il-li
I
10
I
I l
I
I
I
--
11
II
4
IT111
I
T1I
7I
I
i
I lI I
1111
-j r
i1
7
J
Ti
11
II
I L
ITfllh
-1-
r
94
-
14
i I
i
Lg IT- 21 i-illIQpL1JJIxlIwrrIllshy
-1 it if-kFI I
f4ilF -H
I
I
lJ 1J1 l I
_~~~~- I T1 Il Ii
114Ll rr H
r
J
1
III
iF
t iIn I 4 L
4- L_1
IampI
-v
1
_
M M p 4
REV SYM V NO D6-h1h89S lCO
PAGE 4J8
MODIFIED- C-BA-
00I 4 -
I -I 4
80
I jBOll _
bull - - - - t
j -1 I -- S
I i
I 1 I -
FE~S~hM- I~4MENd~1 L~STOP
I I - t L--44
I - I 20
- MIMIIYUM STICK FORCI GRADIIFNT
I WiHHVRU3 OWER ON
- 30 -Ziaso 4
bull iS f H f - _ i
SYMC MINMU FORCE-i bullI o
I
00 -shy
010
0
REV SYM flifTfflO GigJo
V+-+rrr(ICiI
I-I
I i -i1 J L-2I-t-~$ i1 4i
u Mt I - l
U~r
0it IL shy--I K
h rI I 31 -47 shy
-
TiT
I J I1I 4
+ + I 1 f
1 1I i 1 lt 1 - IA I I
- - I I - I t
ItI I-0
II j01 tI I
- i 1 I C
PAG 50E
n c t 14n ar 50 gt1-PAGE
+REV SY bull
H I A--C--I11--114+
1 Firii--Fi
i Iji L- I i- hI mI]
- N7s K -
- j riq P J
L ii _ + 44 - tII
I i
I
iAI
REV ~ ITM DampWh
REVSYMPAGE 51
11 4 t~4~ I-- pi 411 f J
- 4 t-- l[-q --- i I II I
iJ I - i-t - - F-tL Lb F I- l -
J4 I
ll-l -- I I 1
-- i W 1-- II-I I I
i o ro w
4 - P
Ii _
2 I I4 I -IE - LEVATO I V -R-- -
lOIN THE - I I n
I ~~ 1 ~ - I k - ~~Ar~rP Iq 9rpa~34
I _ e
1 -Iif I l
4 1 1 I -
- --I -- ---
-
--- --- iAPR
F16 41= [t 4T -
I P 4 I 412 U1- -
2 _ -_ I-iED-t- i
APR_ _ _ _ _c4 9shy__T -___AGA-- __ _ _ -_ 5
THEBOENGCO PAYI~ I 1
I -] L I iI i IA iUI ( lQS lll I I
+_ t1 i
- shy- 4- -shy1 shy
-I I f I- -
- - -I -- 7
- - --_ _II 1 l - lrshySAl
S - -shy
-- I L
l It I i i ~ i A t A F KmI -t--
A 1
-_r - j I
ti 2 I i - III-
14jefzJ4 -~~~4
Itlt T T - -- I I-tdeg
__ I - -- riilt
4 -TI - I -I-
Ir
F--shy- ~~~~plusmn E -TI-CAC__ _ _ Y-S-E-R - -- -DT _
____ I_ T-M RUIAA OVE ips roca C-CHQC_____
5 7I-APR 6
4AGE 5shy - I - -APR-_-_
BOEING COMANAPRTHE
--
I tsi Iit-T
7
I49
_
-I- i 4
-2-- 110IIIiI
I R
-Ai
S
PA 51shybull~I
diK K t-
o _z _
L
NO p(i
RE SM_I~tl
I
L
-
it44 l 7 -Rua
-- T- - -
- i I i - 4
7-- 174-4 T -t - I I I i i
7- i-l-----1 - - -T shyi i -- - r - - T - -1I- t__ _
flp
I l
- -4 f-rT- --- - 1- T--
- 1 I
WJT~I
-1 L1--shyI
L J
II I Il
__j shy --i-- eI w
7-II L
p ii I- - 7 -1-shy -t
CALC [F 0 L-T PREDICTEDAA~ L~c5035X OOT OFF 3710tFORC~ C A
C-84TO MAINTAIN I G FLG -T
AR BEN OMNPAGE
THE BOEING COMPANY ~ iiq
t - 1 shy
-L 4 4
I I t-Ipp lKt4I IV
- 4
AVt-- -AI 1
I reI
P 56 -
1
jBshy7 7 - Y NFVMAA I641aRE
+6a -q
REV SYM sno in HO 6-1I11Ip
PAGE r(
50
51
52
521
REV SYM
ENGINEERING GROUND TESTS
Engineering ground tests on the powered elevator system were
conducted in two phases Initial testswere made on the modified
empennage at Boeing Seattle between Mar 30 1973 and June l 1973
The horizontal and vertical stabilizers were mated and installed
in their normal position for these tests as shown in figure 50-1
The empennage was subsequently shipped to NASA-Ames Research Center
for mating with the Mod C-BA airframe Ffnal ground tests were
performed on the airplane between July 2 1973 and July 16 1973
The purpose of the ground tests was to determine the operating
characteristics of the powered elevator system and to verify that
it was satisfactory for flight All tests were conducted with the
elevator surface unloaded Tests conducted fall into two categories
1 Control system proof and operations test
2 Control system performance tests
Test results are described below
PROOF AND OPERATIONS TEST
The elevator control system was shown to withstand limit load
with no permanent deformation or tendency to jam
The control system was incrementally loaded through the control
columns to a maximum combined pilot effort of 450 pounds in the push
and 400 pounds in the pull direction Hydraulic power to the elevashy
tor PCU was engaged for the test The elevator surface was blocked
at -25 degrees for the push test and +10degrees for the pull test
The lower force in the pull direction was due to a testing error
rather than by intent With the maximum load applied to the column
the control system was inspected and found-free from potential jams
Following the test the system was visually inspected and the rigging
checked to verify that no permanent deformation had occurred
CONTROL SYSTEM PERFORMANCE TESTS
Control System Gearing
Elevator versus Control Column - The elevator-to-column gearing
nose up direction was lover than predicted due to
Ddeg6-41489
PAGE 57
in the airP01an
a reduced aft quadrant-to-olumn deflection The control column
aft travel limit was therefore increased to 14 degrees to allow
full trailing edge up elevator to be commanded
The PCU installation was found to have a lower than predicted
structural stiffness This will cause a reduction in the elevator
PCU steady state gain with increasing airspeed and hence a reducshy
tion in elevator-column gearing as shown in figure 521 For
airspeeds below 110 knots the maximum nose up elevator will be
limited by the available aft column travel as shown in figure 52-2
This reduction in elevator authority is not expected to cause a
problem
Elevator versus Geared Tab Deflection - The predicted and actual
geared tab-to-elevator deflection is shown in figure 52-3 The
actual gear ratiotde is -06 for elevator deflections between
+10 degrees and -14 degrees compared to a predicted ratio of -07
In addition the geared tab neutral rig point is at -4 degrees
elevator instead of -3 degrees These deviations were considered
acceptable for flight test
522 Control System Feel Characteristics
Feel characteristics were determined for varying airspeeds and trim
conditions by moving the pilots control column and recording column
force versus elevator position on an x-y plotter
Initial tests showed the control system tn have 41 pounds friction
of which 31 pounds were due to the control column and control
cables Total system friction was subsequently reduced to 33 pounds
by reducing the cable rig load from 118 pounds to 80 pounds and
realigning three fairleads All ground test results are for this
configuration unless noted otherwise Typical test data at various
simulated airspeeds are shown in figures 52-4 through 52-8
PAE 5
deg D6-414898REV SYM AMW No
Breakout and friction forces as a function of trim and airspeed
are shown in figure 52-9 The forces generally increase with
increasing nose down trim and increasing airspeed and are symmetric
with respect to push and pull The average breakout force is
60 pounds the average friction force 39 pounds Positive
centering but not absolute centering was ound for all conditions
Some reduction in friction is expected in flight due to increased
vibration This will reduce the breakout forces and improve
system centering
The theoretical and actual feel gradient (Fsde) as a function of
airspeed is shown in figure 52-10 Test results are valid for
+ 5 degrees elevator deflection about zero degrees elevator trim
The ground test results deviate from theoretical in two respects
a The feel gradient in the column aft direction is
approximately 20 lover than in the column forward
direction
b The feel gradient error (theoretical gradient - actual
gradient) becomes increasingly more negative with
increasing airspeed for both column forward and aft
The feel gradient variation between push and pull is attributed
primarily to non-linear gearing The feel gradient did not vary
appreciably with either hydraulic system A B or A and B engaged
523 Elevator Feel System Computer
The elevator feel computer static gain was checked by applying
varying pitot pressures corresponding to the full airspeed range
and recording the resultant feel pressures Final ground test
results agree fairly well with the theoretial results although
an inconsistency was noted in the A channl results between the
final test results and earlier tests Figures 52-11 and 52-12
show theoretical and actual results for systems A and B
Both feel computers A and B were found to be sensitive to feel
pressure flow demands Figure 52-13 shods a typical response
Feel pressure A and B variations are 146 psi and 85 psi respectively
REV SYM fffflff NO D6-1489
PAGE 59
0
524
REV SYM
about a 2h0 psi nominal feel pressure with a maximum elevator
rate of approximately 3h degrees per second
The feel computer performance is dependernt on the vibration
environment of the computer With no vibration the feel computer
has up to 100 psi feel pressure hysteresis At 60 knots this would
result in a 30 variation in feel gradient With a small amount of
vibration hysteresis is less than 30 psi reducing the feel gradient
variation to less than 10 Improved performance will require an
increase in the pressure control valve flow gain and reduced valve
spool friction
The feel computer pitot system contains two small drain holes
There was some indication that these drain holes resulted in a
lower pitot pressure at the feel computer than at the pitot source
The ground test was therefore conducted with the drain holes plugged
The effect of these drain holes on feel pressure will be evaluated
during flight test
It was possible to trigger a sustained oscillation in the B system
feel computer by applying a simulated airspeed of 100 knots or
greater and then switching the Bhydraulic system supply pressure
off and then back on The B system woild immediately oscillate
at approximately 7 Hz and + 200 psi This oscillation could be
stopped by reducing airspeed It was not possible to induce the
oscillation by moving the control column The oscillation could
also not be induced in the A system feel computer Although the
oscillation could be felt in the control column it did not couple
with the elevator PCU The oscillation was further investigated
during flight test to determine if the oscillation is aided by the
pitot pressure ground test equipment
Control System Resolution
The control column-elevator resolution was found to be good with
no apparent deadzones Elevator position hysteresis for full column
travel is 03 degree elevator
SOE 7AOD6-41489
PAGE 60
526 Trim System
Trim authority for the powered elevator system was foundto be
+82 degrees -148 degrees elevator The no-load trim rate was
21 degrees elevator per second nose up and 23 degrees per second
nose down These rates were achieved after inserting a 3 ohm
resistor in series with the motor armaturecircuit Without the
resistor the trim rate was 29 degrees persecond nose up and
31 degrees per second nose down The trim rate appeared to be insensitive to aiding loads but decreases approximately 20 percent
for opposing loads
527 Elevator SAS Actuator
The SAS actuator has a maximum authority of + 5 degrees elevator corresponding to an actuator stroke of + 32 inch This authority
is independent of elevator position provided that the total elevator
command does not exceed + 15 degrees or -25 degrees The SAS authority may be increased to a maximum of -75 degrees +79 degrees elevator (corresponding to + 5inch SAS actuator stroke) by
removing the internal actuator stops
The elevator to SAS actuator static gain was found to be 16 degrees inch This gain is essentially independent of elevator trim
(Figure 52-fl)
The SAS actuator has a maxnimn no-load rate of + 33 degrees elevator per second Actuator centering and locking following disengagement
was positive under all conditions tested Time to center from maximum stroke is approximately 15 seconds System resolution for
SAS actuator inputs was found to be excellent The hysteresis
between SAS command and elevator surface position due to control
system non-linearities was found to be 07 degree elevator
2
0
0
REV SYM snAAVnF No D6-h149_ PAGE 61
525 Control System Dynamic Response
The overall control system response to piht inputs was evaluated
by sinusoidally moving the control column and recording column
force column position and elevator position Test results show
the elevator to closely follow the control column inputs
Typically the elevator position lags the column force by approxshy
imately 30 degrees and column position by approximately 10 degrees
at a frequency of 14 radianssecond The damping of the mechanical
control system is satisfactory with the column undergoing only
one overshoot when displaced and allowed to center
The dynamic response of the elevator powetcpntrol unit (PCU) was
determined by sinusoidally driving the PCU input through the SAS
actuator Test results showed the damping to be close to the
predicted value but the natural frequency to be 90 radsee lower
Figures 52-15 and -16 show the frequenc iesponse for both one and
two hydraulic systems Static load testsshowed thelow natural
frequency to be due to a considerably loverthan predicted structural
stiffness The reduction in natural frequency should haveno effect
on pilot or autopilot control of theairplhne since the gain and
phase-shift below 10 radianssecond is relatively unchanged between
the predicted and actual response
The maximum no-load elevator rate was found to be 54 degrees per
second trailing edge up and 61 degrees pei second trailing edge
down
Ground test results shoved the power control unit installation to
be stable with either hydraulic system A -B or A and B engaged
The installation is however dependent on structural feedback for
stability as the PCU could be made to oscillate by locking out
this feedback in either one orboth directions The maximum
structural feedback is limited by stops in order to control the
magnitude of the load seen by the PCU reaction link Because of
o the lower structural stiffness these stops were adjusted to
prevent bottoming under full aerodynamic 13d
REV SYM AOIUf C No D6-41489
PAGE 62
low_
40
AM
k4
U-M IAWMF-
Mir PP 47
i i4 n
_ _ iat o )AIT~ 1 k 7 24rIV
_ 2 I __ -_ _ _
up rEVRTOR AUTHORfy- - t P -WC E -I -- o _ -
-to8 shya T VI
a T[D
joI shy
0 1 - - 4 0shy
w
-106 0 I -
14- 4
1- I 1 1 - I- -i -r-
r- I l - - -
I- -I - -- i - t shy
-L -- - I - - _ r -- - r
- -1 - 2shy
-I I I [ I [ al d
R EVIE DT MOPPRED)CTED C-BRI
APR H T F65-2-Z [PIK cmece BOEING COMPANY D641489 iTHE
__
- r shy- r - j I_2i -I-t-- I-- - 2--+4-+ shy
a- - - ~-
I I
---- I-I
__---I----- I --shy
-
-
- -
I t - -------shy_------+--
-- r
- 71 4- - - ---I --+i - - A
- --ri I I
--- I
- --- W
Ftu - --- -shy n- --r I ___
-shy
-
-y
t++
I
j-+_ 7 gesvimr r - _ 7 bull i t
--- -
o V
-II __---
- - - ---- I -- 1 - I -shy + -
-
T15i T -I-
+ -j
+ -
I
- ft
---1i -- 1- I--r7 J _I
- 1K I l-i -I----+----- - - - r -r r
_ _I(hI 4 - I t I f 1
1 hJ~ L L I i l l ---
4 i-_ ~ _--_ - i i----Li-tL I-0___ fl
I - -- - --------shy
0at
SYS AOB
-shyr------- 7----Erfiampflod - S dj -shy
- I - -S--t
--------shy 4- ---- ---___ - __- _
S - -- ---- s I s- gfs -
4o _
I --shy - - --- - --- II - -
---------------------- -- J 20I -I - -- -shy -- shy ----shy - -- -
-- ----- I------I---------t~r-ai~g - -~S~-~4e
-------- ----------------------------
-- -
10 I
IkI -shy
oo
m I rCD F
a- - - - _gt
-- _ Ishy
- - -- -- - ---- 2 - -$-ampL 4ao - --- -- - - ---------- --
i t bull -
---- -4 ------ 2 - - -J----- r --___
IIIu
-- -- _ _ _ _
I - i-- r - --- r - 9o k-A L ri- -- e--
- lel
gtgt shy _ - - - -- ---- - -_- - -
S iI I----- -ii - - - -- r bull 7 -
ISI I
g2 -- +-_shy---
20
-- - ---- - tC ---------- -shy--- -
I| e3 - - I
-26 -25 - - --- - - -- + -- 1
__A 4 de_-r r-_
-2- Ile
-oso0n7 c
- r - i 7 C- o + f-+--_I _-__-I
- --- __ _ -i--- -- -- - shy-
_4-i14_ shy
---- --
-----
I-
-
--
-
- -
-pound--
-- - ~ - ---
--
---
-
- ---
-qo I
= -r-
--+
-shy
-
+
I
-
i -
u_
-
-
+
-
++--
vt-=--
-
+
I-
-Z-= _- _
_ _
4 -
_
1 -- +--______
_ _ -
- S - -
-
_+_- -
= _2
- -
--
---
-
--I
-t
-h
---+ -shy
-- -
L----shy
-- -shy
J
-
---
- ---+ - --+_ -- _ ++
++ + - -- = - shy--- -- -- +
- - - __ - - +_ - t---o--- -- - -- shy- r -+- - - I _ _ _ ___t 5- E E3+
_ _- _ _ _ _ __
-- 7 t= +=- -ir L1-- --=__z
-----=Vshy--t---4-- - =_- r
-- - - - - shy-
+ + ---E + Iz--- z
- = -L- + + z
-- - _ -- f
+ _ z --------- + 7__+_I r t
cz g 4 - _
__ _ _ ____--- = ffi
-shy--- - -Z-+-- shy _ 19d--_ - FCamp---- CC _____
t----shy-I
1 t-- - - -+ _- ++ -_--+_r
- li _-=_ shy1 7- +- L+-oL---
1 $amp_x 14
- - -L - [
IJ S r +i
I + - fi|
+ -- 7
7 Se -e)A E
- -- - -- --shy-4s-- --shyts--
6-o---r em- = -
7 QWRAKcu rae f11001
au - I +- -+
Ve CYVRPnos -
I J - I - - T +
4 -
a 6 i - -+-WIsj 4 I --- -- - - -- -- - - c-I-shy
bull I tI u +-I I
I +1- + - +J hii-shy44
N( z -BI 2 1 7
I I 41 I
AP1 F 5-
S 4 0 THE BOEING COMPANY _--4 4L9
FEEL w-
FORCE GRADIENT -Vp LBSiDEG
FEEL GRAE -NT v THZORTCRLshy
_
-
_-
Eshy
------
-i
---t-- -shy
c Aoc 9
-n
i f I
X-
I
7
m Z
vZ
- IY
t i-3t
a 0 3iO- i- 1 p-
C
4 IL 4
-
i~I -shy~ ----
- LA er 7t~ j __________
r--I
-~
i_
I
+
1
-
~-jT
L i2 -
I -
I
1
H f-
L _ 6l~7 1 q v
- 1L -L7shy
4 t ill1
___M
- - _ ____ ____
I - c -poundUAIITLRNe L
73amp-shy
L-Ja i -shy - t o -soo PSI - a
--- --shyJ - t- 44-- - -- _ _ - _ ___
- T - - 7--- ----- - ------shy
r I-4
lt
-1
--
--shy5
-
=i
b
-
-it7 -t-t -
l -
-r- _
i l
I
_
cent rh
1 J
_J_
ZJI
-- -
___
----
_
-
-
_____
- - -- i
L
1 o t
zshy
Etashy
-Tshy
- -- - - - - - ~ - - - -r - - - -
z -- l-- - mr _
-
- =mi- zI I -shy
- ff -iz-ilt A7 RIIC~afUDESLG
I pH
-A-I -- 4
GROUND TCST
Eccir CoMVZurce Zfr1eMc ampxej-otvxc Fnsu~c5 40-S
D6-illt8q Nege 7(~
----- --- -
______
_____
T 1 I 4
4Ishy- rIIVZ
ILII7 _ _lL I
II -1I -I FI I
I-i-r-I----l I0
__I I1 1p 1i 41 1 - - -I I- 4_ -- i
-- - I- ii b --shybull
V i -- I II ---- shy--- _- I
ptit-iI--II - =rld 4 4 L I
T 11
714-J I
~T11t I
- I k I
- LI - 7 -
1 iII- -IIII-I _ _ -
If2II _ I t _ __
~4-----i-]-_Trr IF
H e 4 l__ _ miu~ Ti7T~
-IIJ
oREVISED DATERSS-fay
Aleo -0C1HECK _______~m
APR THE BCOMPANY
7e 7I7
- -
tS-
--
-
-
-
-
--
shy
IJHg3v
_
CO
-TR
Afl NO
I W
V
i
c__ n I
gt
--
-
-shy4-
shy-
1
-A8
-L
- ~-
oiC
v
01
8~
3O1LL1]Id1N
V
---
1
-n-
- -
-shy
-l~w
lt
C)f
1 I
-(d
44
TO
442
R
-THE BO
EING
COM
PANY AG
Co
6-h-lhshy
60
Xbetween
Co
REV SYM
TAXIAND FLIGHTTESTS
The flight test program for the powered elevator modification on
the Mod C-8A airplane was conducted by NASA-ARC with Boeing support
at Moffett Field California Purpose of the tests was to demonshy
strate airworthiness and to determine the opeiating characteristics
of the powered elevator system -
Flight testing consisted of one taxi test and five flight tests
Tebting was conducted on the following dates
Flight Date Purpose
Taxi Aug 28 1973 Taxi tests to 110 knots for flutter checks and control evaluation
No 68 Sept 19 Flight test to 120 knots
69 21 Flight test to 140 knots
70 21 Flight test to 160 knots
71 25 Flight test to 160 knots
72 26 Flight test to 180 knots
A three-week delay occurred betweenthe taxi test and first flight
(flight 68) due to an electrical system problem unrelated to the
powered elevator installation The flight test was planned for
a minimum of four flights to allow fluttei clearance in 20-knot speed
increments The test sequence generally followed on each flight
was to initially conduct the flutter checks up to the maximum airshy
speed designated Following this the control system evaluation was
conducted for the remainder of the flight Recorded flight test data
were analyzed for critical parameters prior to permitting the next
flight
During the flight test program the airplane was flown at airspeeds
ranging between 49 knots (flaps 65 stall) ad 180nots IAS Flight
weights ranged from 46000 pounds at takeoff to a minimum of
36000 pounds at landing The airplane center of gravity varied
29 and 31 MAC Variations in load factor from 01 g to
19 g were attained The airplane was sideslipped to 12 degrees
Angle of attack varied between approximately -3 degrees and +26
SOW4WlC NO D6-41489 PAGE 80
0
degrees (flaps up stall) All tests were conducted below 10000
foot altitude
Pilot reports showed the powered elqvator system to perform very
satisfactorily throughout the flight envelope with no adverse
characteristics noted
61FLUTER TESTS
The flight envelope was flutter cleared in 20 knot speed increments
On each flight a range of speed points wag tested in five knot
increments The airplane was excited by abrupt pilot inputs to
the rudder and elevator with pilot feel being relied on to detect
excessive oscillations Recorded data were analyzed after each
flight to determine the damping levels and trends of the various
modes of vibration versus airspeed Clearance to higher speeds
for the next flight was given when -the resuits were found satisfactor
The vertical tail horizontal tail rudder and elevator were
instrumented to measure their response A diagram showing the
instrumentation is presented in figure 6t-i After the third
flight the accelerometers at the upper anid lower portions of the
vertical tail were relocated in the cockpit because of pilot comments
about the vibration level No problem was found
The results of the flight flutter tests shoved that the Modified C-8A
airplane with powered elevator control system satisfied the flutter
clearance speeds with adequate damping The responses of the rudder
elevator and tabs are heavily damped for all the speed points The
two important empennage modes are antisymetrie modes at about 28 Hz
(stabilizer vibrating in a roll sense) and 62 Hz (stabilizer
vibrating in a yaw sense) Figures 61-2and -3 show examples of
the response to a rudder and an elevator kick respectively at
180 KIAS
REV SYM SPA7AflO NO D6-h1489 PAGE 81
0
62
621
REV SYM
LONGITUDINAL CONTROL EVALUATION
The longitudinal control system was evaluated at the following flight conditions to verify satisfactory operation
1 Takeoff and climb at 90 knots flaps 30
2 Cruise at 120 knots flaps up
3 Cruise at 160 knots flaps up
h Descent at 120 knots flaps up
5 Holding at 90 knots flaps 30
6 Approach at 90 knots flaps 30 7 Approach at 60 knots flaps 65
In addition to routine flight maneuvers specific evaluation tasks
consisted of sinusoidal column inputs column step changes rapid pitch attitude changes sideslips windeup turns pushoverpullups and stalls The evaluation was conducted ftr both one and two
hydraulic systems
Elevator Control Power
Prior to first flight the airplane was ballasted to obtain the same airplane gross weightcenter of gravity schedule as previously
flown with the spring tab elevator control system This schedule
is ghown in figure 62-1
The elevator required for steady 1 Igtrim points conducted during the flight test program is presented in figure 62-2 The trim
points correspond to typical climb level flight and descent condishytions at flaps 56 flaps 30 and flaps 65 MaWjor parameters are listed in table 1 As expected elevator trim requirements were
unchanged by the powered elevator mo4ification
Elevator maneuver requirements are well within the capabilities of
the powered elevator control system The maximum trailing edge
up elevator occurred during the flare where -191 degrees elevator trailing edge up was reached (flight 70 IRXI 235547) Maximum trailing edge down elevator of +90 degrees was attained during
+ 95 degrees per second pitch rate maneuvers at the STOL approach
SflfJflC NO D6-4 1I89
PAGE 82
D 14100 7740 ORIGa71 J 15-047
m
TABLE 1
Flight Weight Percent
No Time x i03 Flaps NH h _e de
72 215757 452 Z 972 - 6 5210 +44 127 -43
70 232100 415 6 924 6 5777 +24 96 -72
70 232139 414 6 924 6 6058 +25 88 -89
69 161520 429 6 927 6 4920 o6 123 -54
165420 426 6 927 6 5079 -o4 133 -49
170040 418 6 940 6 5156 o4 144 -38
70 232214 414 6 924 6 6329 09 75 -102
232255 413 6 924 6 6385 -03 69 -128
72 220107 4h8 6 948 6 6990 -o4 164 -29
220352 445 6 966 6 6412 08 172 -31
220630 44o 6 966 6 6835 06 175 -28
221246 431 6 997 6 7408 02 191 -25
70232335 412- - 65 -3 6 - -T0
72 221646 4 6 869 5996 -82 179 -34
69 164656 437 30 970 6 2978 51 95 -o6 T0gt Z
164820 432 30 972 6 4384 63 82 -12
164940 431 30 972 6 5171 34 1o6 -06
0 70 72
225935 215507
439 456
30 30
938 976-
6 6
5870 2615
16 22
97 101
-12
-12
215543 455 30 970 6 3187 51 86 -24
m
Dt 4100 7740 ORIC371 -3-S-047 J
Flight
No Time Weight
x 1o3 FlaDs Percent NH ON
h e
69 1706i8
170728
170911
413
412
411
30
30
30
941
933
926
-6 6
6
5423
5590
5541
+13
o6
-01
105
97
84
-X5
-27
-44
72 223110 408 30 938 6 7118 -08 98 =27
69
72
171028
171234
171354
22t2228
223350
4o8
406
404
419
405
30
30
30
30
80
902
902
919
945
876
6
6
6
6
6
5150
4404
3880
7043
5342
-33
-38
-16
-19
-56
84
95
107
106 96
-62
-47
-24
-22
-59
72 223820 400 65 999 6 6985 +15 63 31
69
72
174739
223730
224032
224057
224148
224232
366
440o
397-396-
395
394
65
65 65
65
65
65
-
935
97069 938
937
937
935
89
6
-To
70
70
70
4003
6838
64V6-
589i
5110
4213
-103
-I3
-81
-72
-107
-70
72
63 67
81
56
T7
i8
18
067
34
-08
30
HY Co
X
condition (flight 69 IRIG 172710) Typical elevator maneuver
requirement time histories are shown in figures 62-3 -11 -5 and
-6 A summary of maneuver requirements is shown in figure 62-7
Elevator per g data obtained from wind-up turns at constant
airspeed is shown in figure 62-8- Testresults show no change
due to the powered elevator modification
622 Elevator Authority
The elevator is position limited to -25 degrees and +15 degrees
surface deflection at no-load During the taxi tests deflections
of -245 degrees and +14 degrees were demonstrated at a speed of
62 knots (IRIG 212616)
Elevator reversals with one hydraulic system otf wereconducted
at 106 knots in order to verify the predIcted elevator authority
at high speed blowdown was not reached however The elevator
hinge moment coefficient was therefore derived from elevator actuator
loads measured during flight test and used to calculate a blowdown
curve The predicted and calculated hinge moment coefficient is
shown in figure 62-9 The curve shows a considerably lower coefshy
ficient than predicted for large trailing edge up deflections
This results in an elevator blowdown speed of 170 knots instead of
100 knots as shown on figure 62-10 it should be noted that the
blowdown speed is further increased by any pilot effort transmitted
to the elevator surface after elevator PCUblowdown is reached
The increased elevator deflection capabilXty at high speed could
produce excessive tail loads Figure 62-11 shows the horizontal
tail load design envelope Loads due to an abrupt elevator input
of -25 degrees are shown for various airspeeds up to 170knots
The structural design of the empennage is adequate for abrupt
elevator maneuvers up to the design maneuver speed VA (136 knots
-for the Mod C-BA) This will satisfy the requirements of FAR 25
However full trailing edge up elevator above this speed would
result in tail loads in excess of designloads
REV SYM AWAVAWF No D6-4i 48o SPAGE85
623
624
REV SYM
Because of the relatively low pilot effort required to attain full
trailing edge up elevator above 136 knots two recommendations are made
1 Pilots should be cautioned not to make large and rapid elevator
control inputs above 120 knots Control forces should be kept
below 40 pounds pilot effort
2 The effect of reducing the elevator PCU supply pressure from its
present value of 2440 psi to 1500 psi- should be investigated and
if found acceptable implemented This would limit elevator deflec
tion due to actuator output to a safe value as shown in figure
62-10 Maximum elevator no-load rate would however be reduced
from 54 degrees per second to 42 degreea per second
The reduced supply pressure will only limit elevator deflections to a
safe value if no pilot effort is transmitted to the elevator surface
Since this is a possibility once actuatorblowdown is reached the caushy
tionary note should be retained regardless of any reduction in hydraulic
supply pressure
Control System Gearing
The elevator-to-column deflection at different airspeeds is shown in
figure 62-12 The gearing decreases with increasing airspeed due to
increased cable stretch and a reduction in the steady-state gain of the
elevator PCU At 62 knots the elevator-tocolumn gain between 0 and
-10 degrees elevator is 165 degdeg This gain is reduced to 135
degdeg at 180 knots A greater reduction bad been anticipated as a
result of the engineering ground test data (figure 52-2) but did not
occur due to the lower elevator hinge moment
The geared tab-to-elevator deflection is shown in figure 62-23 The
gearing is reduced from a nominal fte = -06 at 62 knots to dtJe =
-045 at 180 knots The reduction in balance ratio is of little signishy
ficance since elevator control power and minual reversion forces are
satisfactory
The series SAS actuator was not activated during the flight test
program SAS actuator gearing could therefore not be checked
Control System Feel Characteristics
Feel and centering characteristics were considered satisfactory by
the pilots Specific comments were that at 90 knots and 120 knots
Io 89APArGAV E 86-hlIPAGE 86
breakout forces were not noticeable and system cpenteripg was good
Feel gradients were found compatible aLth orj-handed operation
Figures 62-14 and -15 show typical oolumnforce-elevator
characteristics Breakout forces are approximately 75 pounds
compared to 55 pounds obtained during the engineering ground tests
This difference is primarily due to a misaligned cable fairlead
near body station 510
The feel gradient characteristic obtaind in flight is lower than
predicted but is similar to ground test results The variation in
feel gradient between push and pull noted during the ground tests
was not evident in the flight test data at the higher speeds prishy
marilybecause the elevator is trimmed in E more linear region and
elevator deflection are necessarily limiteamp in magnitude Figure
62-16 summarizes the feel gradient characteristic The figure
also shows stick force per g data obtainedfromwlnd-up turns to
vary between 30 poundsg and 40 pounds-g Calculated feel force
characteristics based on the feel gradient data of figure 62-16 are
shown in figure 62-17
Feel computer operation from a pilot viewpont was found to be
satisfactory in that no feel force anomalies were noted During
the engineering ground tests two discrepancies were noted
1 A sustained feel computer oscillation could be induced in the
WO computer by cycling the hydraulic- upply pressure--at
simulated airspeeds above 100 knots
2 The elevator feel pressure warning light would light momentarily
when cycling the elevator
Neither of these items was found to occur dtring the flight test
program
The feel computer static gain is shown in figures 62-18 and -19
Both computer gains are on the high sidewith 177 psipsf and
163 psipsf for cQmputer A and computer B respectively compared to
a nominal gain of 152 psipsf
In the steady state computers A and B track each other-adequately
with the A system feel pressures nominally 40 psi higher than 0shy
the B system pressures
REV SYM SSSMAflC INo D6-41489
PAGE 87
2
625
626
IMaximum
REVSYM
NO feel pressure variations with pegasus iozzleposit-ion flaps
one-or two hydraulic systems angle of attack or sideslip were noted
Any variation is small enough to be masked by the normal computer
repeatability For computer A this isAproximately 70psi o- for
computer B ho psi The better erfor ance of the Bl system
appears to be due to lover valve spool friction
Control System Dynamics
Control system dynamics with one or two hydraulic systems were
judged satisfactory by the pilots Relea6e-from control column
steps produced one column overshoot at low speeds (60-90 knots)
and two overshoots at higher airspeeds The Qvershoots were not
considered objectionable as the airplane did not appear to respond
to them Also normal pilot activity added sufficient damping to
eliminate -overshoots
The control system response to a-column release at 127 knots and
a sinusoidal column input at 60 knots is -hown in figure 62-20
The control column at 127 knots has a natural frequency of 182 radse
and a-damping ratio of approximately 035 -The sinusoidal
response at 60 knots shows the elevator position to lag column
force by 13 degrees at a frequency of 11radiansIsecond The phase
ig did not vary significantly with airspted Control system phase
lag at-the short period frequency (approx4mately 08 radianssecond
at 60 knots and 30 radianssecond at 160 knots) is therefore sall
enough to not affect airplane controllability
Elevator Rate
The elevator rate was found to be satisfabtory throughout the flight
envelope Rate saturation appears to have occurred for only one
condition This was an elevator reversalat 100 knots with one
hydraulic system shut off
elevator rates commanded during large maneuvers were as foliows
Condition Elevator Rate (DegSec) Takeoff rotation
- 270S Ten degree pitch attitude changes at pound0 kts 3VS
Landin flare - 3801S
f-D6-4148
PAGE 88
0
627 Elevator Powered Trim System
The powered trim system has sufficient iutjirity to trim the
airplane for hands-off flight over the tot4l flight envelope The
single speed trim rate was considered an acceptable compromise
between high speed and low speed trim requirements Trimrunaways
at anyairspeed are easily overridden by the pilot and represent
no safety problem
628 Hydraulic Power Off Transients
Disconnect transients due to loan of hydraultc power were determined
by monitoring elevator PCU loads during clmb level flight and
descent conditions at various airspeeds
Taxi test results showed the elevator floit angleto be more positiye
than predicted Since this directly affected the potential disshy
connect transients a new trim tab setting was determined The
initial trim tab setting for the taxi tests-and flight 68 was
+1 degree trailing edge down This was subsequently changed to
+4 degrees for flights 69 and 70 and to +35 degrees for flight 72
All data has been corrected for this trim tab setting
Results show that pilot forces between 37ounds pull and 30 pounds
push are required to maintain 1 Ig flight at any normal flight
condition (figure 62-21) For flaps 30 flight conditions between
00 knots and 100 knots IAS disconnect transients can vary between
30 pounds push for climb conditions and 20 pounds pull for descent
conditions During the manual reversion evdluation at 90 knots
flaps 30 a 16 pound push force was required to maintain trim The
force transient was gradual (approximately two seconds) and was
considered mild by the pilot This disconnect transient was zero
-when the trim tab was changed from +335 degrees (+35 degrees
measured on the ground) to +295 degrees
0
The present trim tab rigging (+35 degrees) is considered
satisfactory Disconnect transients over the total flight envelope
are relatively small and should result in uo hazardous condition
0
REV SYM s 7anno No D6-414 8 9 PAGE 89
629 Manual Heyersion
Manual reversion was evaluated for apprqxImately five minutes at
a nominal 90 knots flaps 30 flight condition Control was deemed
adequate for continued safe flight to a landing The most prominent
characteristic is a +32 degree elevator deadzone (equivalent to
+12 inches column travel) Stick forces are higher than for powered
operation but not objectionably go Calculated manual reversion
forces based on the hinge moment coefficient of figure 62-9 are
shown in figure 62-22 For small elevator deflectionst forces
agree closely with predicted values as can be seen by comparison
with figure 44-10 Control forces are lighter than predicted for
large elevator deflections Satisfactory operation of the trim tab
was also demonstrated
63 RUDDER CUT-OUT EFFECT
The effect of the 15 ft2 rudder cut-out on rudder control power
was investigated by doing sideslips at 65 knots F65 and 90 1nots F30
No detrimental effect was noted when compared against flight test
results made prior to the modification as shown in figures 62-23
REY SYM MiPffZAAW No D6_41489 PAGE go
0
INBDY
-aACCELEROMUT-R READING IN DIREGTON oF ARROW
- CONrROL SVRFACE ROTATIONAL DISPLAC-MENT
CALC RT F 7 3 REVISED DATE BUFFALO C-SA ODIFIFD MIOD C-6A-WITH POt6gREc) fLVATOA
CHECK
_ Samp 6-1- N T R T I O N TE~LtA PD ____F__ WilrTm nru A PAGE a
APPD
THFS ErA CCMPAWV D6-44194 IC J 5-047
DI 4100 5040 ORIG3171
BOTH RHYDRAULIC sSSEMS aPE RAVING
V15LOC17Y = 190 sXears ItwsCnrEv
Os
RicHr 5mBS 964+V DlOWN TIP VERTIC4AL ACC SERR VAON
-
LEFT 5TA84 TIP VlEATICAl- +vetooW
ACCEL~ZiRATIoN
RLEFT sinAS4 0+V FWrip Latcnror
RCCSLF-AATION
ANCCLS
rIlME SCALE 5EC4
CALC
ClifKimci7-F
ggX F 1f HLVISO DATE VuvFAo C-s MODIFIEo -AIlAamp~EffEXro CCA
AppOI 61
APP PAG
J~ygflf~~J~~CAIPAWJ J1-4DI 4100 5040 ORIGa71
BOTH HYDRAULIC SYSTEMS OPERArING
VELOCIrY = 180 KNO S INDICATED
RIGHT STAB TIP-VRTICRL 0 +VE DOWN AGGELER T|ON
TIP~VERCAL ACCELERATION
+Vc DOWN
KIOHT STAB TIPLONGIITUD ACe ELERATION
-
0-5-
g-VE FWD
LEFT STAB TIPLONGITUDINaJ-
AcEL CRAT ION
t+VVv
SLEVATOR
GEARED TAB
VE
o 0EGUP
+vE
o DEC T AshyU P
0 8 2
CALO R CA__ _ _F_
CHECK
APPD
APP 0
0I4 421O(P fl4O OlIlG +47
_ _ REVISED _ _
_WITH
TIME
DATE
SCALE SECS
BUFFALO C-8A MfODIFIED POWERED EJLEVATOP
FLI-GH-r urrAi TESr
RESULTamp
FccP
-fl
I On
C-8A
C-3 PAGE 93 D61-plusmn89
J115-047
w WEIGHT - 000 LBS
-- 3 Ii 3 3- _ 3 - 3 5 6 37 38 31 4 7 4 44 4 U033
373
3 33
o -
U 35 4 34
3z o
31
0 -0
7
It- 0
ZZS
Q) 2a5 ___
2
z -7
la1 7
[- TTf I 9up46acbt So 374b 6 ad
I V1111 1YqPfiat~ 0Ea[
6 37 4 1 Aflamp1n t -f +6
40
reg lie
iIIAII t TA f
( ~ A I-- ltA T it frY
1W 1 4i _
iip i d
I I lip
I K lilT i 1 2
lt IT
- I I_ 1LC
H2 ttF VN
i
~ I-t _1-
IIi
CALC RiVISED DATE
--- - ELEVATRrfo W oVyrR 00 C-6A APR FLIHT ENVEWLO Pr __ 2-2 AP PAi
THE BOEING COMPANY 16-09
ajr AtaANInt ItttI I b
I I I li I II I l l~~jJ i~ I Plll II IIIII P I I
i T 1 I i IT A
I] 1 1 I $l HillILIillI L 1 Il I i-T I LI II llilIf IN_J111l94lllhi]T
II I I 1 111 111I 1 I V 1111111 1111 1 111 111111- - - - 1 bWI
I I NilIII IhIIl~l
A T
1119111W 1i11111iHI 11 111
IT ~ lll I1IJJ
i -k--k-I--4--k---- -+-c-+-c------ I M- c-+-+ -- +- --keuro [I 1 --
Iilii Will1111 11SIilrll
ITIf i1 111 uliii P
i I I l I S - I I I
1 N ItIBN J11H l~dI I 1-+li 1kitIih NdI U m I i lll i I ll lI ll Ifllllll
11I__L~ III111 l IIhlIII uL~i4KliI lli I 71 Will_l__iPllIlliUL l i MUI+ Illli WUl PtL 99_--I
II ____Ali F 7 11jI1 ti + I Itt 1 t ii I I I -thui
L I i1 II II II
i Lj Ii II I P 1
L ti+ I i- 11 111illl HIT 11Illi H1IiJ lii 111iIli t 111
__~LT - f L7 iJThv 2 ImiI IL IiiIIuI K Ji~111__lq7fi till+
ll ra lild-i rr ini--m lli UiLl
-I--- F-I IllI--I-II----------- 1I I I - -I-I-II 1
LI 11ri ijtII I II 1 i r 0 1ii 1 C I i I
11141_ill11111 e ~~i i I
HId11 4~ ZEI111gt1 1 1 1 D~ liil~~ ~ - X iI[il 1 i l7ilI
-Itt -ilall
I i It I Iii III i i 11 1
_ IF Ili111i i l
I II
I
Hill ho I li I IH [I shy ~~~ilL m ~l ii1J ll 1[ I I Id i
$ i
1 i11 IM I~IiI 1 1111 Irh 11 M1111 II i 111 f iil~Lh h~ l~Jii r-1
I I ]1 i fI I I I I I 1 I I I 11 11 I l 1 14I I1
3 1 i l
[ i 11
1 1 i 111 H [ P I 1 1 1 1
i 1 11 fl l i1 1 1 1 1 1 1 1 -1 1 1 1 1 1 1 1 - 1 1
il 11It h ii I I LI
1 l0 1 111 1wI Ill~ LiLj111 1[ilNl llll l i ~ [J
III4 i t
TMWli~-rNl
~ Jih~hJW l-F
I -I ill
MI i ni III i l rilIii Nil i 11 _ Rl M11l ti II lL I ] iiilllI-f M [ i i ll h44lli ll~lflli l lJ IL A
ILI II
M IMI I I
ii Ii O RI 111 1
h~l l M 1lr~lll f hmu il 11111111tM 44144M i Iillil II~fl~flqwfl~mII ilt
~~ r lh li _LIl Mill
TII~i I II~it _ I
1-1i1 I WI11I IlA11111- 11111iil l a
I l1111111 1 Ii1-11Nill1 li V II I 41j4I plusmn~~2~
t I 1 iHI II I t 11IINIl l ilI Iii I I I Illjt t I TiII shy
-
I f -d d I-I -1 fl[_
11111~~1101 I 11 I 1I I 1 I II -I~I
1ii 1 I I i l I ll lI id
d lii L Ih I I li i i F I
il llall11
I1 L I 1 II JI
II TIM
liltiIIN IIIIu1Iiliff l it ill 41 11 r1vhiii I t I 1 1111 ill IHr Il
i t M- 1 Wr irt--r Pli
I I HH11lil 11[ IflH 1i Ili L Ill ll]1 Il ilt-1 ll IIi I Ill]
TIiltlII] I ll l TJlll II I I
I
i- 1 l i 1II i till il Ill I
Il11 _lI I
II11 Iillil~lliltillIG 1111]Ti] L IIII[I 11IIN II
FYi mH
- ] ~- i-i--7 1 -I 1 7 I
-
K
t L _I I_--- i-i T
i I Ishyi F shy
-T_ VtT i
a
17
+I- -X-- j I
-I 1 ---I------I7I -Ishy
r iti-
tI LW - 4r-4---
71shyiL4
I
J _
- -r-e---r w r A1deg5 6-2 APR _AP _ ___-_
LG 4
MANE UE -Rp-n-w 4p
363AD DC PA
PAGE 130
BOEING COMPANY o A 6C 4THE
-1- i
-
I-i
- - L-- - - 1 - -fHo cent 6 -v f 4I-
i I I
II iT I I i I I
- - I _lI iy 2 itf rj
I
- ---- -4
1 A7gtgt1 - I - wiLtFt 1IN --- i-----gt 1
shy
-I _ - 1 I I
- I 1
1 - - - -- -- 4--shy
_-_1-iSI _ _ i - shy - --I- - I )
I-t ~ - --- I -N shy
T B -tAJ( -I
Ir- - t-
-- 1
I Ij I shy
_ 1 Y i -i-27 -
illl
P--I -0
-- I TH BO I (4MPNY1 -
r-_-- -- - v P I r L AL= L L L
- I I
I
_Ii
I--
f-i
I
-
I
J
-I II ii r
-
plusmn
I t
L-I
I
I-
I I
--
I - -
]____
t
r I - - -
i - L
-H
I-s - ___
i
al
--7 r ] 4p
I --
4 __
i _ ___
m IIo J
z r-
I -I
I M-r
II
LL fshy - i l_ -
i
-
--I 1
4
4
7 T
-I- -shy
I
-
i - ___
-
--
___
l
I
_
l i
__
-ia ~
I ____
-k - - - l
__
l __
_
t
I-
T4 I - -shy
7shy
I tn i is uuuT --tl-
REVI AT] + - - - j 2__+-r _
tbullr I VT + I-_ _f+ii +shy
ittL+ _4i
--I I I I
r-7Y R4Ct4LK - - --I -+ 4 i js IFI
t tK I 7 1)17- I I 1 JL
I ---- ---
I _ yrAPRn I i
I-6 61-10
5A PR o0 P G
TH OEING COMPANYVAOR-twvww C 9
--
I - ]- I--- -
-I fl
L I 4 _1
1 I
4--4 7iF I1
bull-l i t- 4 -t -J-I=I-- - _ _I r -- - - -L-I-shy+ I I--Wrcjek4 F17i-H -r l-T -_ T - - Tt9 - T
- _t amp I 1 - U I - - -
I -I -I I- shy- - - F - - - I--A f shy - ---i s j _iI I bull
I I I
j r - shy-~~~T- L
I -MR - 1 2
iL_ 1 jI gt4PIT -
C- 4CHEM~
bull - T HEiI B O E ING C O-MPAN )-shy- - HiE S-N-NK SW
---- ----+- --+- --- - - -I+ I
4~4 I t--- --- _ -i-shyi -i - P-F T
I----- - tt
-- )-Tshy__________I
+-- I -iT- I -ishy------ --4 - -l
---- + I
+
r- ef~
- - - i + - +IA 12shy- - - APR -- I t---~-~J2 tETI~ IRS IT~
bull ++ -- bull + Jp - ~ - - - T bull+ -- _4 bull -- 1 I - i
j L amp l - -- -+---tZ-C+ J-----++--- --It-shy+ -ked-+~rt~
-4
THE BOEIN rSiCS- CA r
4i4 ++f-awp 7227-
T - -P I E T I - - -- --- shy
t4 L J + j L _REVIAPR DATE t tiJ L
Fev roe- (PaMM __- __ __
-c etampFIT 5-APR + - --- -- i +
I THE BOEING OOMPANST
- - --j A1-1I_ IIl
1
----_ I4__
JL
IZEshy
IT-shy 4
r
L 1t 1 iiIQ
I
ir
T--
rT
-
l -
IT
I~
i
t
i7 UK-tt-L
LI+IEIW
_ ~
- A
-
t~~~~0
- 1shy
1-Pill
I 1- I--I
I 1 I
I -C T
- 1 T t
-e-I L -
1
14 iJI
i i I s1l -Tfrnf rrr nrr f 17 J1 I
T - 4 1
TT 5 - i ITi mufr --
5i 4 1 4 5 l
4-I
I T I - I -p -
j t L L_ jI __e-- --I 1- ta _vr
LI - J
- -I i K I-
It APR4 1ct~m tampv F1mere~ _
-~t t72_i r VI 11st- 9 1 -1
I Ii T
I
fI (T TA I41K
AnrRA I-s 8wA A[Jt GEN ARTHE BOEING COMPANY IPA _G
L
--
rI I
I ij -A ] - shy
-i I I
_-- ii
-7
_ t S - I_
- shy
~ ArIk
-I4 - 1h 1 I--~
ZI 1iv7J Z A -
- I
T -i tK
I I
I shyishy
p H L -- - -
ILIL ii-A 7 d__ --e tf I 2
-t-- -- -I 7I-
I I I 2
I- I I I REVISEDA 11~ I 9 I)-
1 J- -
C IIr---nz
_- EL I _ a
I I _
VTHE BOEING COMPANY
-----
- --- -
Vi i ll il r Ii
--trvI - +
6 72-C
II -I
4 j lt t- r-- 1-
4 ios t w[o- -_r_ T- _
r 4x shy
- let
APshy4- I C -x-----s 7 -shy
APR1
_ -I4-17 c4 ~ I
4 A shy
THE BOING C H I THE BO I GCO P N [--
-
___
--
I
f7 i - i44iI i IT
r- ijh rv LL 2
r -- T r
I liL ri _T - -t---- I I l -lt
_ _
_ _
I L44j~72z4tj h~ ~ 2I i ~rF j i
L-i4F-t 17 D_--
-F
7l 1 7_jitt
16t
IL it
PA09 (II I APR
TH I C P
v )Ii BEN
IIt - r lt2T C O P N -- - l
~~-t~~f iizzAL-I -i r IEvitPiamp
0i lb
____~ a
____~~~~~~~K
-40-_____
=n ~
_____--
I -__
-
-r
-- S
-- -2L
~ -
t
itnshy
gt
zO ~ ____
- =___
__~~~L
1 4 Z S-plusmn-
t--r
-
4
__
- - -
Z ~ -
f -
mElE
L- m=l_~
-7 Y10 M- IC_ I c -S S
--
0 -4 -- = -shy
2 - -- P__ shy - ---- shy
- - - - - - I
t - 1T- ----i-- t-
ZI _q 1 FA N =4___
t~lt- F~1~- - J
- -- - - -- --- ~- W - shy
-4 -- iI9EET -- - -- S L
77 -ISO-- - 0 - lp
- _ _
41 _______c --- U rY1 1 -i
1141 i-it
lo I 11 _1 _ 11+ II 1 Ih - -h -I
- II -- +-- - +-- 4- --- - --I--- ---- l---- +------ I-shy- d 1111 j I + 1il
l TI i- Ii Pi IL l 1II-iiii4 1[Il I1-1 bi17 I _
Filli
I~~~ IllH[INN_111_IIllu1il IIllTWNl
T1 il II
4H i H ll I4
i 11+-+I-------17 IjUjtltH
41 m L _ litdIN 1-111 IIIlT 1111
]+771T lllh Id- h shyill~ Fii
-1 l IIl I-III +ifJ-li--1i]]T]M -L
- - - -- - - --]II I I Ip I I I I I-T -I
-Illsl
--
-- -
__
__
4- 4 rlkI IA1 tL t
- rt 1 - - - I
-
J----41
- __Ishy -I - - -4 - - 7777
-ttW
- Ashy--
-- --I - j
- ----- shy-- J44
II7 I 77r7
Z - R - I 1 I29a - T shy
l + IR Li -got I T Il Ij -v J+~
T = _ _ _-I I -l r l-F IdO-i f 2~
II -7 - 1 +
-i- P~ I i
7 71L LOA
___ _ _EVI-shy M T T I _LGH
CALCv
S T C rF -___- BO O e _I -x
-M AF
T
TO MItNTAIN lr FLIGIqT 2APR_Z
APR PAG I1IlPrGiiqTHE BOEING COMPANY _ pk It___ _
INNSamp __ _ __ _
- - 4 -
L1 H Ito
L L i- - - shy
I
t
r~
-
_ _ _ Iii
I I
4-i
deg~
IPG
I
of
-T
-- _
ItI
I4- _ -
I
t1itL 1ILE E centA -
)14
IF
THE BOEING COMPANY I 4-_ I
+I+
I
~I Ir -- +-- H 4
1 t
r r
+shy - ]-4+
- - + -] i i t +-+i + I -
I + +-- i
I
i-
KAt7-shy
- I
I
-- --
-s
-
ii -- iit
-
I i i I
0162 -
__I _T
I irt-i
1 f
-4
I
Ii 4
Ttplusmn I+r I-i-JqJL
- _ - r+--- I -4
10 Jill
l-1-ijf
iji 7h -
ll cc I
II ir-+ 12
-
I AI NCRII I 8
i iK r - SrEAZ)Y c AQ1$P f- jA
THE BOEING COMPANY + jS
I
70 CONCLUSIONS AND BECOMMENDATIONS
The design fabrication and testing of apowered elevator system
for the Augmenter Wing Jet STOL Research Airplane was successfully
conducted within a 12 month time period The control system was
demonstrated by flight test to be airwortfyr-and to meet its design
requirements No adverse system characteristics were noted by the
test pilots
Control problems encountered in the STOL flight regime with the
spring tab elevator system have been eliminated by the powered
elevator system Maximum elevator deflection is possible without
excessive pilot effort control feel has been improved control
system response is rapid and precise This has allowed the pilot
to investigate the low speed characteristits of the AWJSRA with
greater precision and increased confidence
The powered elevator has a blowdown speed of 170 knots instead
of 100 knots as predicted The increased elevator deflection
capability at high speed could produce excessive tail loads
Because of the relatively low pilot effort required to attain
full trailing edge up elevator the following recommendations
are made
1 Pilots should be cautioned not to make large elevator control
inputs above 120 knots Control forces should be kept below
40 pounds pilot effort
2 The powered eleyator system should be flight tested with the
hydraulic supply pressure reduced from its present value of
2440 psi to 1500 psi This change should be permanently
incorporated if system performance is found acceptable
I0
0
REV $YM AWFEZL=AVAP NO D6-41489
PAGE 11T7
REFERENCES
1 D6-26057 Longitudinal Control and Airspeed Control System
Study Report
2 D6-40720 The Development of an Augmentor Wing Jet STOL
Research Aircraft (Modified C-8A)
3 D6-4o94 Powered Elevator with SAS Provisions - Design Requirement
Configuration Definition and System Charateriitica
PAI-
REV SYM AFgrlAO oD6-41489 G 1
APPENDIX A
PILOT FLIGHT REPORT
REV SYM ArffOfjW NO D6-41489 SPAGE 119
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWJSRA 716 91973 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith HT NO T 0 GROSS WTC G FLIGHT TIME
68 44800307
POSE Flutter Test
Preliminary evaluation of powered elevator
1 At Y0 Kts AC seems quite responsive to column inputs Step attitude changes-can be made quickly and precisely Release from column steps produce 1 or 2 overshoots but are not objectionable because AC doesnt appear to respond to them and normal pilot activLty (hand on wheel) adds sufficient damping to eliminate overshoots Elevator deflection rate seems satisfactory Breakout was not noticeable during maneuvering and centering was satisfactory Force gradient was satisfactory - easily manageable with one hand With elevator fixed full nose up and nose down trim produced forces which could be held with one hand AC could be controlled with both hands These same comments would apply up to 120 Kts
2 Immediately after lift off aileron forces seemed rather light with some tendency to overcontrol This didnt bother me after I got used to it but will have to be evaluated further
3 Approach to stall was accomplished with flaps 30 PLFtrim at 90 Kts One a indicator went off scale (200) at 66 Kts The other one was hooked up backwards Very light buffet was detected at 58 Kts Stall was at 56 Kts with light buffet slight nose down pitch and perhaps a little left roll Recovery seemed 4o occur with very little a reduction and little or no hysteresis AC was quite responsive to forward column input
4 Landing with flaps 650 nozzles 70 at 65 Kta Flare seemed to require more back force than I was used to but control seemed good Toughdown was firm but not hard AC bounced back in airj however even with lift dump active (Throttles were not retarded)
D6-41h89
Page 120
FSO-3
NASA -AMES RESEARCH CENTER
FLIGHT REPORT
L NO NO DATE OF TEST
C-8A N7i6NA 92173
ORDER PROJ ENG PILOT
T-4488 Vomaske GrossmithInnis
IT INO TO GROSS WTCG FLIGHT TIME
69 44640307 13
OSE
Item 1 Control sweeps
Item 2 Take-off 6F=25 99 NE Noz=60 SAS-off
Precise control of elevator throughout
tem 3 10 sec steady-state 90 KIAS 6F=30 96 NH Noz=60 SAS-off
tem 4 As per item 3 80 KIAS SAS-off
Item 5 As per item 3 100 KIAS SAS-off
Item 6 110 KIAS 6F=56 PFLF Noz=6 SAS-off
Elevator and rudder pulses B Hyd Sys off
Item 7 120 KIAS as per item 6
Item 8 120 KIAS 6F-56 PFLF Noz=60 SAS-off
Elevator and rudder pulses both Hyd Sys on
Item 9 125 KIAS As per item 8
Item 10 130 KIAS as per item 8
Item 12 135 KIAS as per item 8
Item 13 140 KIAS as per item 8
No peculiarities noted At 140 KIAS some longitudinal oscillation noted
Fuselage bending mode
Item 15 100 KIAS 6F-30 PFLF Noz=60 SAS-on
5 sec trim shot
Stem 16 90 KIAS as per item 15
em 17 80 KIAS as per item 15
D6-1489 FS0-3 Page 121
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
-2 -
LNO NO DATE OF TEST
)RDER PROJ ENG PILOT
OAOZ 77 T NO TO GROSS WTC G FLIGHT TIME
tem 18 90 KIAS 6F=300 Noz= 6 deg Flt Path Angle -30 SAS on
5 see trim shot
tem 19 90 KIAS as per item 18
1 em 20 100 KIAS as per item 18
tem 21 60 KIAS Si=65 Noz=70 Fit Path Angle --7 12 93 NH sinusoidals
displacements full nose up and nose down trim changes sideslips to 15
pitch attitude changes +5deg and +10 approach to stall
Notes- in sideslips max bank angle required for 150 ss approximately 5
Wanders in yaw
Approach to stall - 58 KIAS a =140
53 KIAS a - 20
50 KIAS a = 24deg
48 KIAS a = 26
At a = 26 deg some laterally wallowing - lateral control -aequate to control
At approximately a= 300 slight g break experienced no roll-off tendency
tem 22 90 KIAS 6F=30 Noz=60 PFLF
Pull-up and push overs 04 - 16g A hyd sys off A slight bump in
the elevator control during the 16g maneuver
tern 23 As per item 22 with B hyd sys off
No bump experienced this time during the 16g maneuver
-em 25 65 KIAS 6F=65 Noz=700 93 NH - normal approach and landing Elevator
control precise during the approach flare and landing forces seemed higher
during flare and landing when compared to original elevator system 641489 Page 122
NASA - AMES RESEARCH CENTER
FLIGHT REPORT
DEL NO NO DATE OF TEST
AWTSRA 716 92173 0 ORDER PROJ ENG PILOT
T-4488 Vomaske InnisGrossmith
GHT NO T O GROSS WTC G FLIGHT TIME
70 46800300
RPOSE Powered Elevator Flight Test
1 Approach to stall Flaps 560 trim at 120 Kts Terminated at 66 Kts w=27 where moderate buffet (tail I think) was encountered Nose high attitude was quite extreme Copilot reported 170 up elevator required at min speed
Steady state sideslip at 60 KTS Flaps 65 nozzles 70 SAS ON Seemed difficult to stabilize sideslip due to tendency for nose to wander in yaw SAS doesnt seem to help much Also noted quite a bit of bottom rudder required in turns
3 Longitudinal control at 60 Kts AC is quite sluggish and quite a bit of opposite control is required to stop pitch rate once established
4 Approach and landing 65 Kts Fairly high back force required to flare AC but control didnt seem too bad Landing was OK
FSO-3 D6-41489 Page 123
NASA- AMES RESEARCH CENTER
FLIGHT REPORT
ODEL NO NO DATE OF TEST
AWJSRA 716 92573
OB ORDER PROJ ENG PILOT
T-4488 Vomaske 7nnisHardyI
LIGHT NO TO GROSS WTCG FLIGHT TIME
71
URPOSE Powered Elevator Tests
1 At 160 Kts Flaps 56 - Push over-pull ups Noticeable increase in buffet as AC is pushed over to 2 a Longitudinal stability and control are excellent Full nose up and nose down trim can be held with one hand on column
2 At 120 Kts no change in longitudinal trim was noticed with plusmn8
3 Landing approach was made at 60 Kts ylt6t Flare was more gentle than previous Control was good
FSO-3 D6-41489
Page 124
NASA - AMES RESEARCh CENTER
FLIGHT REPORT
)EL NO
ORDER
NO DATE OF
C-8A 716 -l
PROJ ENG PILOT
TEST
9 h
HT NO Vomaske HardyInnis
TO GROSS WTCG FLIGHT TIME
72 46550 114
POSE
Final Powered Elevator Acceptance Test Flight
This was my first left seat flight with the powered elevator and I was quite pleased with the system Stick force gradients breakouts etc are very nice from 60-180 kts
Manual reversion was examined at 90 kts and 300 flaps Airplane was slightly out of trim (Fslt20) when the hydraulics were shut off No problem maneuvering the aircraft in this mode and feel a successful landing could be made Large deadband is noticeable but acceptable
Lateral control was better than on my previous flights (March 73)
FSO-3 D6-4l489 Page 125