Copyright Xsens Technologies B.V. 2011; Company confidential
Estimating foot parameters Jesper Lansink Rotgerink Supervisors:
Dr. ir. Daniel Roetenberg (Xsens) Prof. dr. Stephan A. van Gils
(University of Twente) Slide 2 Copyright Xsens Technologies B.V.
2011; Company confidential Xsens Introduce problem Modelling steps
Working with real feet Contents Slide 3 Copyright Xsens
Technologies B.V. 2011; Company confidential Xsens Spinoff from
University of Twente, founded in 2000 Main business: 3D motion
tracking One of main products: MVN Slide 4 Copyright Xsens
Technologies B.V. 2011; Company confidential MVN: 3D motion
tracking Suit with 17 inertial trackers Used in Hollywood, games,
rehabilitation Issues with foot Internship assignment: Find out if
MVN foot model can be improved using foot sensor data Slide 5
Copyright Xsens Technologies B.V. 2011; Company confidential
Placement of foot sensor on foot important for: 1.Estimation of
position/velocity 2.Detection of ground contact Different shoes or
shoe sizes involve different foot models. What can be seen by using
only the foot sensor? Motivations Slide 6 Copyright Xsens
Technologies B.V. 2011; Company confidential Eventually, try to
identify two rotation points: Start: estimate length of a stick
Secondly: find radius of a sphere Thirdly: Combine stick and sphere
Eventually: Work with real foot Setup Slide 7 Copyright Xsens
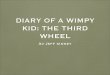
Technologies B.V. 2011; Company confidential Two reference axes: H
is a fixed point. Data from accelerometers and gyroscopes. r is
constant in sensor frame. Estimate length of a stick Slide 8
Copyright Xsens Technologies B.V. 2011; Company confidential Leads
to linear system from which we can solve r: Least squares fit on
the whole data set. Estimate length of a stick Slide 9 Copyright
Xsens Technologies B.V. 2011; Company confidential Two formulas for
spheres: What is measured by the sensor? We need. Estimate radius
of a sphere Slide 10 Copyright Xsens Technologies B.V. 2011;
Company confidential For every vector it holds that: Global angular
acceleration around x and y axis cause respectively negative y and
positive x acceleration: Estimate radius of a sphere Slide 11
Copyright Xsens Technologies B.V. 2011; Company confidential
Finally, we come to the linear system: Again solvable by using a
least squares fit over the whole dataset. Estimate radius of a
sphere Slide 12 Copyright Xsens Technologies B.V. 2011; Company
confidential Again two reference axes: We know from previous. Four
unknowns. Combination of sphere and stick Slide 13 Copyright Xsens
Technologies B.V. 2011; Company confidential Can be written as:
Solved by least square fit on whole data set Combination of sphere
and stick Slide 14 Copyright Xsens Technologies B.V. 2011; Company
confidential Results with test objects Slide 15 Copyright Xsens
Technologies B.V. 2011; Company confidential Results with test
objects Slide 16 Copyright Xsens Technologies B.V. 2011; Company
confidential Results with test objects Slide 17 Copyright Xsens
Technologies B.V. 2011; Company confidential Validation to check if
our combination method can also detect a single sphere or stick:
Results with test objects Slide 18 Copyright Xsens Technologies
B.V. 2011; Company confidential With respect to time, angular
velocity and deflection angle. Sensitivity analysis Slide 19
Copyright Xsens Technologies B.V. 2011; Company confidential
Sensitivity analysis With respect to time, angular velocity and
deflection angle. Conclusions: Measurements longer then 40 seconds
Higher speeds lead to better measurements Deflection angles of 70
degrees and higher are welcome Slide 20 Copyright Xsens
Technologies B.V. 2011; Company confidential How does MVN model the
foot right now? Input: body height & foot length Average foot
Important points Working with real feet Slide 21 Copyright Xsens
Technologies B.V. 2011; Company confidential Working with real feet
How to deal with different phases of a step? Slide 22 Copyright
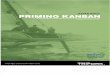
Xsens Technologies B.V. 2011; Company confidential Tests: Walking
Seperate test for ball of the foot Reference data collected with
Vicon system Eight infrared cameras that track position of highly
reflective markers using triangulation Funny extra: one person wore
high heels Working with real feet Slide 23 Copyright Xsens
Technologies B.V. 2011; Company confidential Most measurements are
okay, up to certain inaccuracy Underestimation Person dependent
Results with real feet Slide 24 Copyright Xsens Technologies B.V.
2011; Company confidential Quality of results comparable to
previous Advantage of special movement: less standard deviation
Results with real feet Slide 25 Copyright Xsens Technologies B.V.
2011; Company confidential Estimates are mostly within a few
centimeters from real Script: Can do what we prefer, with little
uncertainty With little improvement could be useful to MVN system
Especially because height of sensor is determined by shape of shoe
and our method can distuinguish. Current MVN cannot. Even high
heels worked out fine! Overall conclusion Slide 26 Copyright Xsens
Technologies B.V. 2011; Company confidential Underestimations:
Deformations of soft tissue Linearization Splitting the data
Discussion & further research Slide 27 Copyright Xsens
Technologies B.V. 2011; Company confidential Questions? Thanks for
your attention