Embed Size (px)
Citation preview

Copyright
by
Soonkwon Paik
2005

The Dissertation Committee for Soonkwon Paik Certifies that this is the approved
version of the following dissertation:
Near-Field Microphone Array Design for a Hands-Free System
in a Vehicle by Using the Nash Genetic Algorithm
Committee:
Baxter F. Womack, Supervisor
Elmer L. Hixson, Co-Supervisor
John A. Pearce
Francis X. Bostick
Mark F. Hamilton
Preston S. Wilson

Near-Field Microphone Array Design for a Hands-Free System
in a Vehicle by Using the Nash Genetic Algorithm
by
Soonkwon Paik, B.S., M.S.E.
Dissertation
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
Doctor of Philosophy
The University of Texas at Austin December 2005

Dedication
Dedicated to my wife Hyejung Min,
my son Joshua ( NakJun ) Paik,
and my daughter Esther( Yedam ) Paik

Acknowledgements
First of all, I could not help confessing that God has been really good for me to
finish my dissertation in adversity. Whenever I meet difficulties, He shows me that He is
alive, is right next to me, stretches His hand and embraces my weakness.
I really thank my supervisor, Dr. Hixson for taking caring of my progress and
showing the way to research and live as an authentic engineer. It was so impressive to
look at one phrase, “Be a rat in the lab” on the wall in his office. I would like to thank Dr.
Womack, my supervisor for guiding me to go to the right direction and giving me the
excellent opportunity to work with undergraduate students in my research area as a TA
for EE 464 class. I would like to express my gratitude to my other four committee
members, Dr. Pearce, Dr. Bostick, Dr. Hamilton and Dr. Wilson. I will never forget their
advice to train me to do an engineering work.
I am very grateful to my praying friends, Yulyoung Park, Eunha Kim, Sanghoon
Oh, Chulho Ryu and Youngok Kim who encouraging me to do my research consistently
with all their hearts. I am also grateful to my lab-mates, Douglas F. Winker and John A.
Mills who inspire passion in this area with a variety of experience and knowledge.
Especially, a lot of conversation with Douglas helped me acquire the practical knowledge
in building audio amplifiers and loudspeaker systems. I thank my parents, Jongkwan Paik
and Kyungja Lim for raising me in Christianity which I can be honest and live for God’s
glory. Whenever I get lazy and am in a fret, their life remind me of what I can do right
v

vi
now. I also thank my parents-in-law for encouraging me to study abroad and spending
their precious time to take care of my son and daughter to focus on my research. I would
like to give the special thanks to my church fellows, Hongrae Lee, his wife Sook-ki Kim,
Jason Hong, his wife Okju Hong, Kiwoon Kim, his wife Yoonjung Kim, Wonhui Cho,
his wife Yoonae Cho, Kwangseop Kim, his wife Sunsook Kim and Sangyeop Lee, his
wife Jungmin Lee for their love and warmness when I and my family stayed in Austin.
I thank Texas instrument and National instrument for providing me a lot of
resources, software and hardware, to keep me researching this topic. Without their
support, I would not finish my dissertation.
Finally, I would like to express my special gratitude to Hyundai Motor Company
which gave me the excellent opportunity to extend my knowledge related to audio system
design and have backed me and my family up financially for five years. Especially, I
thank director, Uibong Kim who helped me obtain the approval for fellowship from the
company.
Whenever I meet difficulties, I always meditate on these words from Holy Bible.
“Be strong and very courageous. Be careful to obey all the law my servant Moses gave
you; do not turn from it to the right or to the left, that you may be successful wherever
you go. Do not let this Book of the Law depart from your mouth; meditate on it day and
night, so that you may be careful to do everything written in it. Then you will be
prosperous and successful. Have I not commanded you? Be strong and courageous. Do
not be terrified; do not be discouraged, for the LORD your God will be with you
wherever you go.”
Joshua 1:7-9

vii
Near-Field Microphone Array Design for a Hands-Free System in
a Vehicle by Using the Nash Genetic Algorithm
Publication No._____________
Soonkwon Paik, Ph.D
The University of Texas at Austin, 2005
Supervisor: Baxter F. Womack
Co Supervisor: Elmer L. Hixson
The near-field beamforming method is investigated in this study for a replacement
of current hands-free system of a cell phone. The goal of this array system is to design a
beamformer covering 250Hz to 8kHz of voice frequency band in conjunction with
constant beamwidth technique.
Though the acoustical array is effective in a reverberant field, its use is limited at
low frequencies because arrays longer than 1 meter are difficult to install inside a vehicle.
Furthermore, it is especially impractical to use circular coordinates inside a vehicle
because the sound source, a human mouth, remains a fixed distance from and moves
parallel to the surface of the vehicle’s headliner. For the delay-and-sum beamformer in a
near field, it is difficult to derive the complex coefficients, namely, the amplitude weight
and time delay, by analytical methods.

viii
This study first describes a sound-field analysis using one popular method, the
finite-element method. By obtaining the global information, the data reveal the
characteristic of the interior sound field near the installation space for a microphone
array.
Second, a numerical optimization method for designing a fixed microphone array
in the near field is investigated that uses the Nash genetic algorithm (Nash GA), which
was originally used in electromagnetism problems. The Nash GA determines the optimal
geometry of an element alignment for the inside of a vehicle and then generates the
complex coefficients at the first stage. Unlike in a far-field array, the phase response in a
near-field array plays a key role. Therefore, a second stage is added to filter out
coefficients with which the responses are cancelled out in the main lobe.
Third, based on the results from the algorithm, the array is implemented with two
PCI-4472s, which are 8-channel simultaneous analog sampling devices. The results,
measured in an anechoic chamber, correspond to the results of a computer simulation.
The array performance satisfies the requirements for hands-free mobile telephony where
the microphone array is installed in a vehicle’s headliner. To investigate the signal-to-
noise ratio, the data is also measured in a reverberant field, like a classroom.

ix
Table of Contents
List of Tables ......................................................................................................... xi
List of Figures ....................................................................................................... xii
Chapter 1 Introduction 1
1.1 Motivation of This Study .......................................................................1
1.2 Previous Work .......................................................................................2
Chapter 2 Analysis of the Sound Field in a Car 9
2.1 Introduction............................................................................................9
2.2 Structural characteristics of a vehicle’s interior...................................10
2.3 Interior sound energy distribution with Femlab ..................................17
2.4 Conclusion ...........................................................................................38
Chapter 3 Optimization of Array Parameters in the Near field 40
3.1 Near-field modeling .............................................................................40
3.2 Beamforming procedure ......................................................................44
3.3 Numerical simulation and implementation..........................................49
3.4 Conclusion ...........................................................................................55
Chapter 4 Implementation of Array with Constant Beamwidth 57
4.1 Considerations of broadband beamformer...........................................57
4.2 Constant beamwidth in the far field.....................................................59
4.3 Constant beamwidth in the near field ..................................................63
4.4 Realization of filters and simulations ..................................................74
4.5 System design ......................................................................................79
Chapter 5 Implementation of the Microphone Array 84
5.1 Outline..................................................................................................84
5.2 Beampatterns in the Anechoic Cha0mber............................................85
5.3 Beampatterns in the Reverberant Room ..............................................91
5.4 Comparison of Directivity Index Values .............................................97
5.5 Qualification Test using Real Data ......................................................99

x
Chapter 6 Conclusion and Future Work 103
6.1 Conclusion ............................................................................................103
6.2 Implications for Future Research..........................................................104
Appendix A Verification of Femlab 108
A.1 Helmholtz Resonator used as a Filter ................................................108
A.2 Eigenmode analysis ...........................................................................111
Appendix B Measurement Data 114
B.1 Measurement in the anechoic chamber..............................................114
B.2 Measurement in the reverberant room ...............................................115
Appendix C Amplitude Equalization Filter 116
References 118
Vita 124

xi
List of Tables
Table 2.1: List of interior volumes of several grades of cars.............................11
Table 2.2: Absorption coefficients for materials in car interior.........................14
Table 2.3: Statistics for final 3-D model for various frequencies. .....................23
Table 3.1: Complex coefficients by the Nash GA .............................................53
Table 3.2: Complex coefficients by the Nash GA with the four-element array 54
Table 4.1: Complex coefficients for each array .................................................72
Table 4.2: Microphone calibration data .............................................................81
Table 4.3: Selected microphones and weights for each microphone. ................83
Table 5.1: Complex coefficients for a nine-channel microphone array.............87
Table 5.2: Reverberation Time (RT60)..............................................................93

xii
List of Figures
Figure 1.1: Locations of microphone array and the source of voice signal. ......3
Figure 1.2: Adaptive beamformer. .....................................................................5
Figure 1.3: Microphone Array System with the Post-filter................................7
Figure 2.1: Sound wave interaction between two materials.............................12
Figure 2.2: Main materials inside a car. ...........................................................13
Figure 2.3: Several types of sound propagation due to various shapes inside
a car. (a) Longitudinal cross section. (b) Side section. ..................15
Figure 2.4: Typical spectrogram of engine noise in changing speed in a given
time. ...............................................................................................16
Figure 2.5: Spectrum of wind noise with two different speeds........................16
Figure 2.6: Spectrum of tire noise with two different speeds...........................17
Figure 2.7: Menu for input of several boundary conditions.............................20
Figure 2.8: Car modeling with Nastran to simulate the interior noise. ............21
Figure 2.9: Simulated noise sources in the AutoSEA report............................22
Figure 2.10: One example of 3-D surface model for sound field simulation.....23
Figure 2.11: Final 3-D modeling and locations of noise sources for Femlab
simulation.......................................................................................24
Figure 2.12: Final 3-D modeling and analysis with Femlab. .............................25
Figure 2.13: Simulation of the engine noise at 125Hz. ......................................27
Figure 2.14: The SPL distribution for the engine noise at 125Hz......................29
Figure 2.15: Simulation of the engine noise at 500Hz. ......................................30
Figure 2.16: The SPL distribution for the engine noise at 500Hz......................32
Figure 2.17: Simulation of the windshield noise at 250Hz. ...............................33

xiii
Figure 2.18: The SPL distribution for the windshield noise at 250Hz...............35
Figure 2.19: Simulation of the windshield noise at 250Hz. ...............................36
Figure 2.20: The SPL distribution for the tire noise at 250Hz. ..........................38
Figure 3.1: The application of hands-free in a car requires Cartesian coordinates
for the consideration of the horizontal movement of a sound source.
........................................................................................................41
Figure 3.2: Configuration of binary code for genetic algorithm. .....................45
Figure 3.3: Graphical expression of the required beampattern. .......................46
Figure 3.4: Nash Genetic Algorithm. ...............................................................47
Figure 3.5: Realization of time delay in buffers...............................................48
Figure 3.6: Array alignment for 4 and 6 element arrays for a center frequency
of 500Hz.........................................................................................49
Figure 3.7: Comparison of simulated and measured beampatterns of sub-array
with center frequency 500Hz. ........................................................53
Figure 3.8: Measured beampattern with 4 element array at 500Hz .................55
Figure 4.1: One example of array alignment....................................................59
Figure 4.2: Gain transfer function of far-field array.........................................61
Figure 4.3: Total directivity pattern of Subarray A and B at f = 500 Hz. ........62
Figure 4.4: Total directivity pattern of Subarray A and B at f = 750 Hz. ........62
Figure 4.5: Total directivity pattern of Subarray A and B at f = 1000 Hz. ......63
Figure 4.6: Nonlinearity of variation of HPBW...............................................66
Figure 4.7: Array gain without consideration of phase cancellation................68
Figure 4.8: Array response cancellation at 600 Hz. .........................................69
Figure 4.9: ‘In phase’ status within HPBW region at 600Hz...........................70
Figure 4.10: Finalized microphone array alignment . ........................................71

xiv
Figure 4.11: Beampattern at center frequency for each array. ...........................72
Figure 4.12: Frequency response at focal point..................................................73
Figure 4.13: Broadband beamforming filter for each array. ..............................74
Figure 4.14: Matlab functions for finding the real transfer function..................75
Figure 4.15: Realized filter of )( fH . ...............................................................78
Figure 4.16: System Diagram.............................................................................79
Figure 4.17: Typical circuit diagram of the microphone and driver. .................80
Figure 4.18: Modified circuit for a pre-amplifier. ..............................................82
Figure 5.1: Pre-amplifier with 16 channels. .....................................................84
Figure 5.2: Horn Driver as a Point Source. ......................................................86
Figure 5.3: Microphone Array as a Receiver. ..................................................86
Figure 5.4: Set-up for the measurements in the anechoic chamber..................87
Figure 5.5: Beam Patterns in an Anechoic Chamber. ......................................91
Figure 5.6: Reverberant room...........................................................................92
Figure 5.7: Beampatterns in the reverberant room...........................................96
Figure 5.8: Directivity Index. ...........................................................................99
Figure 5.9: Setup for measurements...............................................................100
Figure 5.10: Power spectral density of recorded signals..................................100
Figure 5.11: Comparison of two measurements with an array in reverberant
room. ............................................................................................101
Figure 5.12: PSDs at x = 0m and x = 0.7m with single microphone................102
Figure 5.13: PSDs at x = 0m and x = 0.7m with an array.................................102
Figure 6.1: Shape of Cross and T arrays. .......................................................105
Figure 6.2: Comparison of beampatterns of two-dimensional array for the
center frequency 500 Hz ..............................................................105

xv
Figure A.1: Helmholtz resonator used as a filter.............................................108
Figure A.2: Dimensions of the resonator ........................................................110
Figure A.3: Modeling of the Helmholtz resonator by using Femlab. .............110
Figure A.4: Frequency response from the tube system. ..................................111
Figure A.5: Rectangular container. .................................................................112
Figure A.6: Eigenvalues of the rectangular container from Femlab. ..............113
Figure C.1: Total array response.....................................................................116
Figure C.2: Amplitude equalization filter response. .......................................117
Figure C.3: Total array response with the amplitude equalization amplitude
filter..............................................................................................117

1
CHAPTER 1
INTRODUCTION
1.1 MOTIVATION OF THIS STUDY
As modern industry increasingly requires exact and super-fast processing and
delivery of information, the demand also increases for mobile tools such as the wireless
Internet, navigation systems, and mobile phones. Among those tools, mobile phones have
penetrated deeply into our lives. They are popular because they are compact and
convenient; people can use them anytime and anywhere—when walking, eating,
traveling, or driving a car.
Yet, in some circumstances, the mobile phone may pose problems of safety and
convenience. For example, drivers talking on mobile phones have only one hand on the
steering wheel, imperiling themselves and other persons. Aware of the danger, state and
national legislatures are currently enacting laws banning drivers from using cell phones.
Because of this legislative trend, the development of high-quality hands-free systems is
expected to accelerate. In fact, the demand for hands-free devices in cars has been
increasing in pace with the development of other convenient devices, such as power
windows, air conditioners, and audio/visual units.
Currently, commercial products—for example, omni-directional and unidirectional
microphone systems—have encountered difficulties with poor signal-to-noise ratio. This
drawback results from two major types of exterior noise source: periodic engine noise
and irregular or non-stationary noise like tire noise and air-turbulence noise from the
windshield. Specifically, the commercial products have problems with reverberant noise

2
and acoustical effects as determined by the space or cavity structure inside the car [1, 2].*
The mixture of the various types of noise blurs the voice signal, and as a result the voice
signal undergoes degradation according to the Speech Intelligence Index (STI) [3].
Attempts to improve signal-to-noise ratios and STI readings have employed such
techniques as adaptive cancellation, an array beamformer, an adaptive beamformer, and
blind source separation. Section 1.2 describes work in these techniques in detail.
1.2 PREVIOUS WORK
Most methods for improving the signal-to-noise ratio currently depend only on
digital signal processing, which demands intensive computation and sometimes produces
sound distortion. Such methods are difficult to implement in real time. Furthermore,
different kinds of noise occurring inside a car require different digital signal processing
techniques, which in turn entail system-design difficulties and increase computational
time. Consequently, the design described in this study is based on an array system.
Development of the array system makes use of the Nash genetic algorithm to obtain the
optimal placement of array elements in a near-field situation. This dissertation, after
explaining the sound field inside a car, describes this array-design technique. The
following paragraphs give an overview of array design and describe the status of the
research in this area.
A broadband microphone array is able to perform its tasks—that is, speech
enhancement, echo cancellation, and reverberation suppression—in a precise and
effective manner. The array can do this because it utilizes the spatial domain as well as
*See References section.

3
the time domain. An effective combination of spatial and temporal processing leads to an
efficient solution.
The operation of the conventional beamformer is based on a delay-and-sum
technique, which is applied to far-field arrays. In current practice, the use of microphone
arrays has expanded to the application of hands-free telephony for desktop computers. As
a result, the development of the near-field array has entered the limelight of array
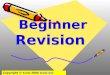
processing. For example, in vehicle applications, it is assumed that the microphone array
is installed on the headliner above the driver’s head. Thus, the distance between the
driver’s mouth, which is the source of the signal, and the microphone array is short,
approximately 30 cm as shown in Figure 1.1.
Figure 1.1: Locations of microphone array and the source of voice signal.
Clearly, this short distance does not satisfy the assumption of a far-field analysis.
Moreover, in array processing in the far field, the wavefront is assumed to be planar,
while the wavefront in the near field is spherical. The near field is defined as r < 2L/λ,
where r is the radial distance from an arbitrary array origin, L is the largest array
dimension, and λ is the wavelength of the operating frequency [4]. An analytical method
has difficulty in obtaining an optimum array response in the near field. The problem with
the large size of the array and the low frequency response was discussed in [5]. Tager
1.2 – 1.3 m
0.3 m
Microphone Array
Humanmouth

4
tried to solve the problem of amplitude and phase compensations in the search for the
best geometry for high directivity.
The literature describes two major techniques for near-field beamforming. The first
technique uses a numerical search method, that is, an optimization method in [7, 8, 9, 10],
where the gain of a microphone array is defined as the ratio of the array output signal-to-
noise ratio over that of an individual sensor (Equation 1.1).
)()()()()()()(
fwfRfwfwfRfwfG
nnH
ssH
= (1.1)
where )( fRss is the desired-signal correlation matrix, )( fRnn is the noise or
interference correlation matrix, )( fw is the vector of complex microphone weights. The
optimized )( fw is obtained by noise modeling with equal spacing or unequal spacing of
elements.
Kennedy et al. [11, 12, 13] developed a computationally simple beamforming
procedure to design an array that achieves a desired near-field beam-pattern response.
This work was unique in that it was based on a solution of the wave equation.
As discussed previously, applications for the hands-free use of mobile phones
have been promising in the near field [14, 15, 16, 17, 18]. Adaptive noise cancellation,
however, has been ineffective within noisy environments, because the noise reference
signal cannot be fully separated and spectral leakage cancels the desired signal. Methods
based on the General Sidelobe Canceller (GSC) or the optimization method have been
developed to deal with diffused noise fields, such as the interior spaces of automobiles
[19]. Recently, the adaptive beamformer shown in Figure 1.2, which employs a mixture
of adaptive noise cancellation and array beamforming, has been used, but excessive and
complicated computation is required and the results are slow to converge [20, 21, 22, 23,

5
24]. In addition, Brandstein et al. [25], who review other methods using discrete signal
processing, introduced statistical signal processing methods such as adaptive
beamforming and subband beamforming using concepts of multi-rate signal processing.
It is well-known, however, that the fixed beamformer is still effective in highly
reverberant sound fields [26]. Furthermore, the adaptive beamformer needs a high signal-
to-noise ratio from the fixed beamformer [27], as shown in Figure 1.2. This avoids super-
resolution that the output power minimization degrades the desired signal.
FixedBeamformer
Blocking matrix Adaptive filter
+Blocking matrix Adaptive filter
+X[k]
ArrayInputvector
Yd[k]
Y ’d[k]
ε[k]
Figure 1.2: Adaptive beamformer.
Since the output from the fixed beamformer fundamentally ensures the total
performance of the beamformer, more research (including this disseratation) has gone
into developing the fixed beamforming methods. This research explores the use of two
alternative methods: numerical synthesis and numerical optimization. The purpose of the
first method is to find a set of array coefficients that steers the main beam in a given
direction with a given set of elements and that yields sidelobes meeting a specified
criterion [28, 29]. This systematic method is based on an adaptive array and uses an

6
iterative method to find the best attainable pattern. The second method uses a numerical
optimization employing an evolutionary algorithm, such as a genetic algorithm [30, 31].
Cost functions, which evaluate the possible candidates, are used to find the optimal
solution. This optimization method, when compared to exhaustive or random searching
methods, is efficient in finding the best solution in a short time.
Because the voice is a broadband signal from 300 Hz to 4 kHz, constant-
beamwidth techniques are required to obtain constant signal-to-noise ratio within the
frequencies of interest. A traditional method is harmonic nesting, called the SHA
technique after Smith [32] and Hixson and Au [33, 34, 35, 36], which is discussed in
detail in Chapter 4. The problem with anomalous lobes appears, however, when the array
is steered away from broadside [37].
Goodwin and Elko [65] introduced an improved method in which a constant
beamwidth can be attained by incorporating the capability of frequency-dependent beam
steering into the multi-beamforming approach. A novel method was introduced to deal
with the constant beamwidth problem [38, 39, 40]. This method is based on near-field
compensation from the criterion for the far field in that it uses the spherical harmonic to
transform the near-field broadband frequency invariant beam-pattern specification to an
equivalent far-field frequency-varying beam-pattern specification. The implementation is
described in two papers [41, 42], which suggest that the combination of more than two
beamforming methods is necessary to make the array practical in a real room acoustic
situation.
In addition, the research into microphone arrays has obtained much higher signal-
to-noise ratios by using the post filter [43, 44, 45, 46]. Figure 1.3 is an example of a
microphone array system with a post filter.

7
FixedBeamformer
Blocking matrix Adaptive filter
+Blocking matrix Adaptive filter
+X[k]
ArrayInputvector
Yd[k]
Y ’d[k]
+
-
Post filter
Figure 1.3: Microphone Array System with the Post-filter.
This post-filter system enhances the spectral features of the output of an adaptive
beamformer. The system provides the adaptation of the noise level by using a Wiener
filter with the combination of the auto power spectrum and cross power spectrum of the
filtered input channels. The results from research papers have clearly shown that this
system is an improvement over the delay-and-sum beamformer and adaptive
beamformer.
Note that the fixed beamformer stage in any advanced microphone system has
certain advantages, such as the removal of super-resolution and the reduction of adapting
time. This study, therefore, focuses on increasing the high directivity of the near-field
array by considering the geometry of the elements.
1.3 OUTLINE OF THIS DISSERTATION
This dissertation is organized as follows. Chapter 2 investigates the characteristics
of the noise field inside a car and its frequency components and describes the sound field
by using the distribution of the sound pressure level at specific point. Chapter 3 describes

8
the derivation of the near-field beamforming method using the Nash genetic algorithm. In
Chapter 4, the beamformer introduced in Chapter 3 is used for the implementation of
constant beamwidth. Several problems with the near-field beamforming are observed and
their corresponding solutions are developed. Chapter 5 describes the real-time
implementation of the method and compares the beam patterns from simulations and
measurements. In addition, the directivity indices within the frequencies of interest are
determined. Last, the performance of the system is monitored in a room with
reverberation effects. Finally, Chapter 6 discusses the performance and the contribution
of this study and suggests the possible ideas to extend this study.

9
CHAPTER 2
ANALYSIS OF THE SOUND FIELD IN A CAR
2.1 INTRODUCTION
Noise and the acoustic properties of the interior space are important parameters in
the performance of a phone system inside a car. Several unwanted sources of noise may
degrade the performance of a sound-input device for communications. Those sources
include the engine, wind, and the tires on the road. As mentioned in Chapter 1, numerous
methods have been tried to improve the signal-to-noise ratio of automotive phone
systems, but few research papers report good results.
The speed with which a type of array-system design can be realized is an
important consideration to car manufacturers, who normally have less than 2 years to
launch a new model. Thus, simplicity of design is an advantage. Manufacturing has
already been successfully accelerated by the application of numerically computational
simulation of structural analyses, collision test, and other advanced techniques. These
techniques not only facilitate advanced auto designs, but they also reduce costs by
performing virtual tests that are close to field evaluations. In the same way, sound-field
analyses give designers essential information and stabilize the initial quality of designs.
This chapter models the acoustics field produced by noise. The approach uses a
finite-element analysis with FEMLAB that is based on the Helmholtz equation. This
equation expresses the interrelations of acoustical pressure in air temporally and spatially.
There is much research on the noise simulation of a car’ interior [47, 48], most of which
has focused on simulating noise sources from the engine vibrations, air turbulence against

10
the windshield, and friction between the tires and the road. The purpose of this paper is to
investigate sound pressure or energy distribution from the various noise sources
according to reasonable assumptions. This finite element method with Femlab is used to
obtain information to define the functionality of microphone array systems.
Appendix A includes two examples to verify the performance of Femlab.
2.2 STRUCTURAL CHARACTERISTICS OF A VEHICLE’S INTERIOR
The automobile has developed into a highly integrated machine that combines
mechanical, aerodynamic, electrical and chemical systems. These various systems must
provide several types of performance such as maximum speed, durability, reliability,
stability, safety, and convenience. Similarly, sound reproduction devices inside a car have
evolved in several ways to be able to create an acoustic field with the quality of a concert
hall. Except in top-brand cars, however, which use heavy sound absorbents and thick
window glass, the sound inside a car is dominated by noises from the several sources. In
the application of telecommunications, special techniques are needed to reduce noise
inside the car itself to obtain good speech intelligibility.
To obtain good voice quality, it is first necessary to characterize the interior sound
field of the car by identifying the noise sources inside the car and by understanding how
those noises propagate. Generally, the parameters that determine acoustic properties
depend directly on physical conditions inside the car, that is, the volume of the car
interior, the properties of materials with which the propagating wave interacts, and the
shape of the interior surface.

11
2.2.1 Room Reverberation Effect
Room reverberation effect is important for telecommunication because long
reverberation times can reduce speech intelligibility [3]. Simply speaking, excessive
reverberation time lowers the ability of the driver to understand speech, and
understanding is important for a telecommunication device such as cell phone.
Reverberation time is predicted by the original Sabine equation,
∑=
iiiS
VTα
161.0 (2.1)
where T is reverberation time, V is room volume in cubic meter, Si is the component
surface area, and αi is the sound absorption coefficient. Table 2.1 gives typical interior
volumes and Table 2.2 gives absorption coefficients.
Table 2.1: List of interior volumes of several grades of cars.
Category Interior Volume(m3) Models
Compact Car
Mid-size Car
2.83 ~ 3.11
3.12 ~ 3.39
3.40 ~
~ 4.84
Audi A4, BMW 325,Infiniti G35, Volvo S40(V40)Audi A6, BMW 525 ~ 645,
Cadillac CTS, Chrysler PacificaAudi A8 L, Infiniti M45,
Lexus LS430, Lincoln Town CarBMW X3, Lexus RX 330,
Lexus GX 470Acura MDX, Cadillac SRX,
Lexus GX 470Cadillac Escalade, GMC Yukon Denali,
Lincoln Aviator
Full-size Car
Compact SUV
Mid-size SUV
Full-size SUV
4.85 ~ 5.47
5.48 ~

12
Compared to a concert hall, with a volume of 3000 m3, may have a reverberation time of
about 2s, a car is predicted to have a much shorter reverberation time, from a few
hundred milliseconds to a few tens of milliseconds [19]. The data of Table 2.1 were
measured by Goulding and Bird [19].
2.2.2 Properties of Materials Inside a Car
As shown in Figure 2.2 and Table 2.2, numerous types of materials cover the
interior structures of a vehicle. These interior structures include several seats, the floor
and ceiling, the rear package tray, inside surface of the doors, the dash board and
instrument panel, overhead storage, the sun visor, and so on. As shown in Figure 2.1,
when a sound wave encounters a different medium, some energy is reflected and some
energy is transmitted. The interaction between sound energy and interior materials is
described by several coefficients in Equation 2.2 and 2.3.
Incident sound wave : P +
Reflected sound wave : P -
Transmitted sound wave : P tr
Medium ‘A’
Medium ‘B’
Figure 2.1: Sound wave interaction between two materials.
1≤⋅= +− RforPRP (2.2) 1≤⋅= + RforPTPtr
(2.3)

13
where R is the reflection coefficient and T is the transmission coefficient. Note that noise
inside a car results from a sound wave transmitted from a source outside the car. To
simplify the problem without severely degrading results, however, this study focuses on
the interactions of sounds inside the car, even though those sounds have exterior sources.
In particular, the reflection coefficient can be rephrased by the sound absorption
coefficient in Equation 2.4, which indicates the percentage of incident sound that is
absorbed when the sound wave encounters the different medium.
21 R−=α (2.4)
Here α is the sound absorption coefficient (SBC). The value of SBC generally varies with
the frequency of the incident sound and the impinging angle. Since materials inside a car
have irregular surfaces set at various angles, SBCs for random incidence will be used for
this work.
Figure 2.2: Main materials inside a car.
Glass
Leather
Carpet
Plastic

14
Table 2.2: Absorption coefficients for materials in car interior.
125 250 500 1000 2000 4000Window 0.35 0.25 0.18 0.12 0.07 0.02Human body 0.18 0.4 0.05 0.04 0.04 0.04Floor 0.08 0.24 0.57 0.69 0.71 0.73Seat (Leather) 0.4 0.5 0.58 0.61 0.58 0.5Seat (Cloth) 0.6 0.74 0.88 0.96 0.93 0.85Ceiling 0.56 0.64 0.7 0.72 0.68 0.62Trim (Plastic) 0.01 0.1 0.43 0.71 0.65 0.32
Octave-Band Center Frequency (Hz)Material
The data collected in [49, 50, 51, 52] shown in Table 2.2 show clearly that the interior of
a car consists of a mixture of low-, mid-, and high-frequency sound absorbers.
2.2.3 The Surface Shape of a Medium
Generally, a room structure with parallel walls generates cross reflections (flutter
echoes). The interior trims of a car, however, are tilted 1 to 2 degrees in the upper
direction and door windows are curved at a comparatively large radius (see Figure 2.3).
Therefore, the sound field inside a car tends to spread out in all directions; that is, the
sound field has no particular focus and direction. Furthermore, reflections off the
windshield glass and door windows travel downward to the floor. The floor normally
consists of carpet, which is a good absorber of sound in the mid- to high-frequency range.

15
(a) (b)
Figure 2.3: Several types of sound propagation due to various shapes inside a car.
(a) Longitudinal cross section. (b) Side section.
2.2.4 The Classification of the Noise Sources
The main components of the exterior noise entering the interior are engine noise,
wind noise (whistle noise), and tire noise [19, 53, 54]. The data below (Figures 2.4 to 2.6)
were measured by Puder and Steffens [2].
1. Engine Noise
Frequency range: Less than 1000 Hz
Origin: Front (dashboard)
Stationary but varying with speed
Spectrogram

16
Figure 2.4: Typical spectrogram of engine noise in changing speed in a given
time.
2. Wind Noise
Frequency range: Less than 500 Hz
Origin : Windshield and side windows
Noise component with the lowest power, varying with speed
Spectrum
Frequency(Hz)
Wind Noise at 100Km/hWind Noise at 140Km/h
Figure 2.5: Spectrum of wind noise with two different speeds
3. Tire Noise

17
Frequency range : Less than 1000Hz
Origin : Floor (bottom)
Principal component of car noise
Spectrum
Figure 2.6: Spectrum of tire noise with two different speeds
The spectra of Figures 2.4, 2.5, and 2.6 re-emphasize that the need for robust
spatial filtering at low frequencies is one of main problem in this research. Note
especially that, as speed increases, the spectra of wind and tire noise do not change as
shown in Figure 2.4, 2.5 and 2.6. To maintain speech intelligibility, a telecommunication
system must not allow the noise components to degrade the lower frequencies of the
human voice (from 100 Hz for the male and 200 Hz for the female, extending to 3000
Hz) [55].
2.3 INTERIOR SOUND ENERGY DISTRIBUTION WITH FEMLAB
As a first step, an analysis of sound energy distribution was obtained by a finite-
element method (FEM) in accordance with the linearized wave equation, which describes

18
sound propagation in time and space [56]. The finite-element method is a method for
solving an equation by approximating continuous quantities at discrete points on a grid or
mesh. Because finite-element methods can be adapted to problems of complex
geometries, they are powerful tools in the solution of important problems, such as sound
field analyses. Moreover, the availability of fast and inexpensive computers allows
problems to be solved in a straightforward manner using these methods.
Using the following equation,
00 =+∇ tup ρ (2.5)
four boundary conditions can be expressed to formulate the Femlab software. Acoustic
impedance of surfaces can be derived from the definition of reflection coefficient below.
on
on
ZZZZR
+−
= (2.6)
where R is the reflection coefficient, Zo is the characteristic impedance in air ( =
)20)(41534321.100 CatraylsMKSc o=⋅=ρ , and Zn is the characteristic impedance
in the medium that the sound wave encounters.
Perfect absorption boundary ( on ZZ = making R = 0)
From Equation 2.5,
00 =+∇ tUP ρ
t
UP∂∂
−=∇ 0ρ (2.7)
UjP 0ωρ−=∇ , when )( krtjo euU −⋅= ω (2.8)

19
Since nZPU = ,
nZ
PjP 0ωρ−=∇ (2.9)
For air,
0
0 ZPjP ωρ−=∇ (2.10)
00
0 cPjP
ρωρ−=∇ (2.11)
PjkP ⋅−=∇ (2.12)
Perfect rigid boundary ( ∞=nZ making R = 1 )
∞−=∇
PjP 0ωρ
0=∇P (2.12)
Sound absorptive boundary
From Equations 2.4 and 2.6,
⎟⎠⎞
⎜⎝⎛
−+
⋅=RRZZ n 1
10 (2.13)
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−−+
⋅=αα
1111
0ZZ n (2.14)
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−−+
⋅
−=∇
ααρ
ωρ
1111
00
0
c
PjP (2.15)

20
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−−+
−=∇
αα
1111PjkP (2.16)
Figure 2.7: Menu for input of several boundary conditions.
Femlab software, which was written by the Comsol Company, has well-designed
menus, as shown in Figure 2.7, for the input of these boundary conditions.
The final consideration for the simulation was to locate several noise sources
inside a car to obtain reliable results from the simulation. Even though papers related to
this topic are few, one study reported in Application Note No. 21 of AutoSEA used ESI-
basic Nastran software, another FEM tool for structural analysis [47] was developed. In
that report, the authors investigated (1) the noise level in the car, (2) the main sources and
transmission paths of the noise, and (3) a method to reduce the noise level without
substructures such as chairs, as shown in Figure 2.8.

21
Figure 2.8: Car modeling with Nastran to simulate the interior noise.
This modeling approach considered the transmission of sound from the exterior to the
interior as the vibration of surfaces due to the mass law [56]. Since the concern of this
work was only the propagation within the interior sound field, the specified boundary was
assumed to generate, for example, a sine wave at a fixed frequency without any vibration.
The interaction between the vibrating walls and the incident wave may cause
superposition; however, because the vibrating walls produce the sound wave with the
same frequency as the propagating wave, the problems related to the source assumption
can be resolved without considerations of complicated noise sources, as shown in Figure
2.9. It is assumed, moreover, that the additional noise generated by the resonance of the
panel was not considered.

22
Wind NoiseRoof
Trunk
Interior
Tire Noise
A_PLR LowerFrt_chassis
Engine VibrationDash
Windshield A_PLR Upper
Left Floor
Figure 2.9: Simulated noise sources in the AutoSEA report.
Another difficulty is the complexity of the geometry. The interior comprises
numerous curved surfaces and irregular faces to appeal to the buyer’s sense of the
aesthetic. As a reference, the model in Figure 2.10 was found in Farina and Ugolotti’s
paper [48]. These authors tried to obtain a binaural impulse response for the auralization
technique to create the virtual sound. They used two methods: the boundary elements
formulation for low frequencies and pyramid tracing for high frequencies. Even though
they did not consider the changes of the sound field caused by the effects of the materials
inside the car, they pointed out the problems of using the finite-element method related to
computer memory limitation. As the complexity of the geometry increases, the need of
memory allocations also increases.

23
Figure 2.10: One example of 3-D surface model for sound field simulation.
An additional problem relates to the mesh size and the wavelength of the sound.
Each mesh is supposed to represent the sound-wave propagation at a specific point. If the
size of the mesh is not small compared to the wavelength, the result may have numerous
discontinuities in space, and it would be difficult to describe the sound propagation.
Therefore, a tradeoff between effective modeling and the limitation of memory should be
considered first. In this study, the solver type was selected with the intent of resolving
this problem. Fortunately, Femlab software provides both direct and repetitive solvers to
accommodate the problem. Table 2.3 shows the solver type for various frequencies and
the statistics of their solutions.
Table 2.3: Statistics for final 3-D model for various frequencies.
Frequency InitializedMesh
Degreeof Freedom
CalculationTime (s)
UsedMemory(GB)
Solver
~ 500Hz 84,254 127,681 515.39 1.4DirectSpool
1000Hz 115,352 171,704 1,185.14 1.1 GMRES
2000Hz 136,051 200,890 2,383.99 1.2 ↑

24
The model used for the Femlab simulation is shown in Figure 2.11. The fields for
the engine, tire/road, and windshield noise analyses are given the following sections.
Figure 2.11: Final 3-D modeling and locations of noise sources for Femlab
simulation.
Figure 2.12 is one example from Femlab analysis. It shows global distribution of
sound pressure level (SPL) inside a car. The numerical value of SPL at certain area or
point is obtained by the color bar indicator in the right side.

25
yx
z
Figu
re 2
.12:
Fina
l 3-D
mod
elin
g an
d an
alys
is w
ith F
emla
b.
Figure 2.12: Final 3-D modeling and analysis with Femlab.

26
Since the goal of this study is to show the information near the space for installation of a
microphone array system, three SPL distributions in that region along axis 1, axis 2 and
axis 3 will be shown. Those axes which consists of intersectional lines of planes x = 1.05,
y = 0.45 and z = 1.35 are chosen to trace the variation of the sound pressure level near the
installation space of a microphone array.
2.3.1 Comparison of Simulations for Low vs. High frequency Noise Component
Since the noise component of low frequency is dominant as referred to section 2.2 and
most of the materials inside a car are good absorber of high frequency sound, the
simulations at low and high frequency are needed.
First simulation is for the engine noise at 125Hz around the installation space for
a microphone array as shown in Figure 2.13. The ‘◊’ mark in Figure 2.14 indicates the
measured points at every 0.1 for axis 1 and 2 and 0.05m for axis 3.
The SPL distribution along axis 2 where the array will be placed has a flat pattern
as shown in Figure 2.14. (b). This means that the field near a microphone array due to the
engine noise with low frequency component is uniform in steady condition where the car
is running at the same speed on the same road. This fact is supported by another SPL
distribution along axis 3 parallel to z axis. The SPL distribution along axis 1 shows the
uniformity in the 1st row seat.

27
The
dist
ribut
ion
of S
ound
Pre
ssur
e Le
vel(d
B)
95 85 80 75 70 65 60x
z
y
Axis
2
Axi
s 1
Axi
s 3
Figu
re 2
.13:
Sim
ulat
ion
of th
e en
gine
noi
se a
t 125
Hz.
y
Figure 2.13: Simulation of the engine noise at 125Hz.

28
0.8 1 1.2 1.4 1.6 1.8 2 2.260
65
70
75
80
85
90
Axis 1 parallel to x axis(m)
SPL(
dB)
(a) SPL distribution along axis 1.
-0.4 -0.2 0 0.2 0.4 0.660
65
70
75
80
85
90
Axis 2 parallel to y axis(m)
SPL(
dB)
(b) SPL distribution along axis 2.

29
0.8 0.9 1 1.1 1.2 1.360
65
70
75
80
85
90
Axis 3 parallel to z axis(m)
SPL(
dB)
(c) SPL distribution along axis 3.
Figure 2.14: The SPL distribution for the engine noise at 125Hz.
Figure 2.15 is the simulation of the engine noise at 500Hz. Even though the SPL
distribution along axis 2 is reasonably flat, other distributions begin to show non-uniform
pattern as shown in Figure 2.16. It is important to note that the SPLs are nearly uniform
along the array.

30
Figure 2.15: Simulation of the engine noise at 500Hz.

31
0.8 1 1.2 1.4 1.6 1.8 2 2.250
55
60
65
70
75
80
85
90
Axis 1 parallel to x axis(m)
SPL(
dB)
(a) SPL distribution along axis 1.
-0.4 -0.2 0 0.2 0.4 0.650
55
60
65
70
75
80
85
90
Axis 2 parallel to y axis(m)
SPL(
dB)
(b) SPL distribution along axis 2.

32
0.8 0.9 1 1.1 1.2 1.350
55
60
65
70
75
80
85
90
Axis 3 parallel to z axis(m)
SPL(
dB)
(c) SPL distribution along axis 3.
Figure 2.16: The SPL distribution for the engine noise at 500Hz.
2.3.2 Comparison of Simulations for Windshield vs. Tire/Road Noise
In this section, the contribution of windshield noise and tire/road noise with f =
250Hz is investigated. The SPL distribution near the installation space of a microphone
array. Figure 2.17 is the simulation of the windshield noise at f = 250Hz and Figure 2.18
shows the SPL distributions along a microphone array. The SPLs along axis 2 and 3 show
uniform distribution while the SPLs along axis 1 are non-uniform and get decreased from
front to back.

33
Figure 2.17: Simulation of the windshield noise at 250Hz.

34
0.8 1 1.2 1.4 1.6 1.8 2 2.250
55
60
65
70
75
80
85
90
Axis 1 parallel to x axis(m)
SPL(
dB)
(a) SPL distribution along axis 1.
-0.4 -0.2 0 0.2 0.4 0.650
55
60
65
70
75
80
85
90
Axis 2 parallel to y axis(m)
SPL(
dB)
(b) SPL distribution along axis 2.

35
0.8 0.9 1 1.1 1.2 1.350
55
60
65
70
75
80
85
90
Axis 3 parallel to z axis(m)
SPL(
dB)
(c) SPL distribution along axis 3.
Figure 2.18: The SPL distribution for the windshield noise at 250Hz.
Figure 2.19 is the simulation for the tire/road noise at 250Hz. The SPLs along axis
2 shows nearly flat pattern along a microphone array. Even though the variations of the
SPLs along each axis in Figure 2.20 (a) and (c) are drastically changed, it can be stated
that the distribution is nearly flat near a microphone array.

36
Figure 2.19: Simulation of the windshield noise at 250Hz.

37
0.8 1 1.2 1.4 1.6 1.8 2 2.260
65
70
75
80
85
90
95
100
Axis 1 parallel to x axis(m)
SPL(
dB)
(a) SPL distribution along axis 1.
-0.4 -0.2 0 0.2 0.4 0.660
65
70
75
80
85
90
95
100
Axis 2 parallel to y axis(m)
SPL(
dB)
(b) SPL distribution along axis 2.

38
0.8 0.9 1 1.1 1.2 1.360
65
70
75
80
85
90
95
100
Axis 3 parallel to z axis(m)
SPL(
dB)
(c) SPL distribution along axis 3.
Figure 2.20: The SPL distribution for the tire noise at 250Hz.
2.4 CONCLUSION
The test simulations showed several results about the sound field inside a car.
Therefore, the following conclusions can be drawn from the results of simulation.
First, the SPL distributions along a microphone array are flat or nearly flat. From
these results, the sound field inside a car is a diffuse field. A diffuse field is one in which
a large number of reflected or diffracted waves combine to render the sound energy
uniform throughout the region [49]. For the region investigated in this study, the
variations in sound pressure levels from all directions were insignificantly small at low
frequencies. However, the simulations at higher frequencies begin to show small
differences in sound pressure levels. Therefore, it is expected that this near-field

39
microphone performs well inside a car or in the similar field by removing the unwanted
noise spatially to increase the signal to noise ratio from the output.

40
CHAPTER 3
OPTIMIZATION OF ARRAY PARAMETERS
IN THE NEAR FIELD
3.1 NEAR-FIELD MODELING
In far-field theory, the directivity function D(θ) for N equally spaced elements is a
simple function of θ, the radial angle to source, as shown in Equations 3.1, 3.2, and 3.3
[56,58].
)sinθ2
kdsin(N
)sinθ2
kdN(sinD(θ =) (3.1)
∑=
−=M
1n2M(even) ]θcos
λdπ1)(2n[cos)θD( (3.2)
∑+
=+ −=
1M
1n1(odd) 2M ]θcos
λdπ1)(2n[cos)θD( (3.3)
where N is the number of elements, M is the quotient of the number of total array element
divided by 2, and d is the spacing between elements. This derivation, which is applicable
because the wavefront is planar and that the magnitude term is a constant, is called the
delay-and-sum beamforming algorithm. The array response is reinforced by adding the
wavefronts with corresponding time delays in the look direction and suppressing spatially
uncorrelated noises from other directions. This simplicity makes it easy to expand this
idea to broadband beamforming for constant halfpower beamwidth (HPBW). One

41
broadband method uses harmonic nested arrays. This method uses several subarrays to
cover the wide range of frequency [36]. The subarrays have exactly the same array
responses at each octave frequency. The problem in the current case is that a subarray for
a relatively large-sized array is required to derive the desired beampattern at low
frequencies with the longer wavelengths.
The same strategy is not valid for near-field beamforming because the wavefronts
are spherical, not planar. The limitation of the analysis for a vehicle, especially for the
application of hands-free system, can be explained as follows. First, the variations of the
magnitudes at the various sensors are directly involved in the array response in the near
field, and these variations cannot be negligible since the wave propagation model is not
planar. As Ryan and Goubran clearly showed, the use of the planar wave model in the
near field leads to significant errors in the determination of array response [24]. Instead,
to avoid errors in the near-field array response, a spherical wave propagation model is
necessary. Second, it should be noted that circular coordinates with respect to r and θ are
not valid for this application.
Figure 3.1: The application of hands-free in a car requires Cartesian coordinates
for the consideration of the horizontal movement of a sound source.

42
In Figure 3.1, the human mouth is the source of the voice signal. The position is
expressed in x and y coordinates. Two possible talkers are shown. Here, the human
mouth is assumed to be a point source so that the pressure field around the human head is
omni-directional, which is in accordance with Dunn and Farnsworth’s measurements
[59]. The distance between the microphone array and the talker’s mouth is 0.3 m.
Consequently, it is desirable to express the directivity function in the near field in
Cartesian coordinates, as shown in Figure 3.1.
With this model, it is required to define a spatial directivity function, ),( xH ω , in
the near field with respect to the operating angular frequency ω and the displacement
x . This function is derived from basic radiation field equations in the far-field theory
[56]. When 22 3.0)()( +−= onn xxxr ,
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=
=
∑
∑
=
−
=
−
N
1n
(x)rjk
n
tjω
N
1n
(x))rktj(ω
n
n
n
e(x)r1eA
erAp
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅= ∑∑
==
N
nn
n
N
nn
n
xkrxr
jxkrxr
p11
0 )(sin)(
1)(cos)(
1 (3.4)
where xon is the coordinate of nth element, p is the sum of the pressures at each array
element, tjeAp ω⋅=0 , N is the number of elements, A is an arbitrary source constant, and
k=ω/c. Therefore, )xω,(H is defined in the near field as follows.

43
2
1
2
1 )()(sin
)()(cos
),( ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛= ∑∑
==
N
n n
nN
n n
n
xrxkr
xrxkr
xH ω (3.5)
or
( ) ( )22xH(ω srcr ⋅+⋅=), (3.6)
where
⎥⎦
⎤⎢⎣
⎡⋅⋅⋅=
)()( xr1,,
xr1
n1
r ,
[ ]))(())(( xkr,cos,xkrcos n1 ⋅⋅⋅=c ,
[ ]))(())(( xkr,sin,xkrsin n1 ⋅⋅⋅=s .
A spatial directivity function x),H(ω is
))()((),,( 222 srcrasca ′⋅+′⋅⋅=′′ nH (3.7)
where
[ ])R(x),cosk(r),R(x)cosk(r nn11 −⋅⋅⋅⋅⋅−=′c ,
[ ])R(x),sink(r),R(x)sink(r nn11 −⋅⋅⋅⋅⋅−=′s ,
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅⋅=
n
2
1
a
aa
a

44
Here a is a diagonal matrix that represents the normalized magnitude weight of
naa ,,1 ⋅⋅⋅ , and Rn is the distance that corresponds to time delay correction for each array
element.
A simple method based on far-field theory can be applied to a uniformly spaced
linear array with 2/d λ= [9]. A magnitude compensation method is used to increase
the gain at the focus by 1 dB for focal points closer than one quarter of the array length. If
the phase is compensated, it is found that the array gain is increased by 3 dB [16].
According to [9], a higher array gain with complex weights can be obtained for
2/λd < as a trade-off between robustness and array gain. This method does not control
beamwidth or sidelobe levels, and the location of each array element is found by using an
exhaustive search in all possible ranges of interest. For this design, therefore, we will use
the Nash genetic algorithm (GA). The Nash genetic algorithm optimizes the magnitude
weighting and the time-delay correction needed in Equation 3.7 to obtain the required
directivity beam pattern.
3.2 BEAMFORMING PROCEDURE
The required values in Equation 3.7 are optimized by the Nash GA. This Nash
optima method was proposed by J.F. Nash [60], and M. Sefrioui and J. Periaux [61]
introduced and developed the Nash GA. The Pareto genetic algorithm, one tool of multi-
objective optimization methods, has become standard, but the Nash GA has the
advantage of being fast and robust for optimization problems [62]. Because the current
problem requires the derivation of two or three sets of complex coefficients, it is
considered a multi-objective problem.

45
3.2.1 Strategy for Optimization of Beampattern
To obtain the required beampattern, cost functions are used to evaluate the
performance of expected solutions. These consist of a series of binary numbers, called
chromosomes, as shown in Figure 3.2, and a set of chromosomes is called a population.
Figure 3.2: Configuration of binary code for genetic algorithm.
The values of two cost functions must be near the optimum for solutions to
converge to an optimum. To solve this near-field problem, the design criteria must be
known. The first criterion is that the desired half-power beamwidth (HPBW) must be 0.2
m, and the array must have a maximum value in the middle of the array. This value of the
HPBW covers small movements of the talker’s mouth or adjustments in sitting position.
A second criterion is that the maximum sidelobe level must be less than a specified value,
namely, -20 dB.
According to those criteria, cost functions are defined as follows:
( )0),,(min03),,(minCF00.11 =′′⎟
⎠⎞⎜
⎝⎛ =+′′=
=±= XXXxXXX HHcc
scascax ωω
I
⎟⎠⎞⎜
⎝⎛ −′′=
= req2 SLL),,(minCF YYYxSLLc
H scaxω
where
),(: 0=∂
∂=
xxHxxSLL
ω
4434421321321
44 344 21321321
44 344 21321321
tcoefficiencomplexrd
delayTimeMagnitude
tcoefficiencomplexnd
delayTimeMagnitude
tcoefficiencomplexst
delayTimeMagnitude
321
10110101011011001010101011001010101

46
where cω is the design angular frequency, cfπ2 ,, CF1 is the first cost function, CF2 is
the second cost function, SLLreq is the required side lobe level X the player X and Y the
player Y.
Figure 3.3 gives the graphical specification of the required beampattern.
Figure 3.3: Graphical expression of the required beampattern.
Unlike typical genetic algorithms, the Nash GA yields multiple populations. Each
population, called a Player, represents one objective or solution and optimizes a single
allotted value with other values fixed.
)),(),,((,)),,(),,((
)),(),,((,)),,(),,((
22111
21
21
11
1
22111
21
21
11
1
nb
nb
nb
nbbbbb
na
na
na
naaaaa
RaRaRaRa
BPlayerRaRaRaRa
APlayer
⋅⋅⋅
⋅⋅⋅

47
After that, the players exchange best values among the different populations, as shown in
Figure 3.4, until no player improves any longer.
)),(),,((,)),,(),,(( 22112211h
ah
ak
ak
aj
aj
ai
ai
a RaRaRaRa
SolutionFinal
⋅⋅⋅
where i, j, k, and h are arbitrary numbers of corresponding players in which
chromosomes are arranged in ascending order of cost functions.
Figure 3.4: Nash Genetic Algorithm.

48
Therefore, the process of optimization results in finding the near-optimal or intersection
point of two cost functions.
3.2.2 Coding Strategy Considering Implementation
In array signal processing in the near field, performance is very sensitive to
variation of time delay. The smallest amount of error may change the shape of the
beampattern. For example, if the value 8 kHz is used as the sampling frequency, every
sample has the inherent time gap of 1/8000 Hz = 0.000125 second. Compared to
analytical solutions, use of the optimization method is beneficial in this situation, because
the addition of code to produce values matched to the requirements of the hardware
removes or avoids errors due to the sensitivity to variations in time delay. The algorithm
added to the Nash GA to avoid this problem is called “hardware-preferred code.” When
one set of time delays for three elements—0.4288, -0.5155, and 0, in meters—is obtained
from the code, they can be converted to time values—0.001250, -0.00150, and 0. As
shown in Figure 3.5, they have exact time distances based on 0.000125 second. In Figure
3.5, c indicates sound speed, 343 m/s, and fs, is sampling frequency, 8000 Hz.
Figure 3.5: Realization of time delay in buffers.

49
3.3 NUMERICAL SIMULATION AND IMPLEMENTATION
Matlab software was used to generate the complex coefficients and simulated
results. Several sets of complex coefficients were obtained to verify the effectiveness of
the code based on the Nash GA plus the hardware-preferred algorithm. If the array had
six elements, the problem consisted of two variables, because the array alignment was
symmetrical about the centerline, and the relative and normalized value of the nearest
element to the center was always used for magnitude weighting and 0 was used for time
delay. Arrays of six and four elements with a center frequency of 500 Hz were tested and
compared to investigate the effects of the number of array elements on final performance,
as shown in Figure 3.6.
Figure 3.6: Array alignment for 4 and 6 element arrays for a center frequency of
500Hz.

50
The initial implementation was coded with Labview 7.1 with the aid of two PCI-
4472s. The PCI-4472 is a multi-channel analog input device manufactured by National
Instrument. The device can sample eight channels at the same time with a maximum
sampling frequency of 102.4 ks/s, which ensures a 45 kHz alias-free bandwidth. This
device interfaces with a desktop computer through pre-amplifiers which increase the
amplitude of the direct signals from the microphone array. Chapter 4 provides detail of
the interface.
The preliminary measurements were made in an anechoic chamber, and a JBL
horn driver was used to generate the signal, which swept from 300 to 1000 Hz. As a first
example, a data set for an array designed for 500 Hz was obtained for the six-element
array, and the graphs were plotted at various frequencies from 300 Hz to 1 kHz, as shown
in Figure 3.7. For the array to be used as a nested array in a broadband system, patterns at
adjacent frequencies were of interest. Table 3.1 indicates complex coefficients for the
beampatterns.
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(a) fo = 300Hz

51
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(b) fo = 400Hz
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(c) fo = 500Hz

52
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(d) fo = 600Hz
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(e) fo = 800Hz

53
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-35
-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n (d
B)
SimulatedMeasured
(e) fo = 1000Hz
Figure 3.7: Comparison of simulated and measured beampatterns of sub-array
with center frequency 500Hz.
Table 3.1: Complex coefficients by the Nash GA
The measurements indicated that the complex coefficients from the Nash GA
worked well in a real sound field at the design frequency, as shown in Figure 3.7 (c), and
satisfied the requirements of the sidelobe level and the half power beamwidth. Some
aspects of the beampattern derived by the Nash GA were investigated here. First, as the
Element 1 Element 2 Element 3 Magnitude
Weight 0.8065 0.9883 1
Time Delay Correction(m) -0.4288 0.5145 0

54
frequency is increased or decreased, the half power beamwidth showed rapid variation,
compared to beampatterns in far-field arrays. This difference may result from the smaller
total size of the array, with its spacing less than λ/2. Second, at frequencies higher than
500 Hz, the magnitude of the sidelobe level becomes larger than that of the main lobe, as
shown in Figure 3.7 (e)–(f). Finally, at 1 kHz, the beampattern is almost the same as that
of an unshaded array with the spacing λ/2 at 1 kHz. These aspects are prominent
differences in near-field beamforming. They should be considered when the constant
beamwidth array is implemented with the same algorithm.
The next measurements were made with the four-element array, as shown in
Figure 3.6, to check the performance of an array with fewer elements. Such arrays could
be of great interest for industrial usage because fewer elements entail less cost, provided
performance is the same. The coefficients are shown in Table 3.2. The beampattern at
500 Hz is shown in Figure 3.8.
Table 3.2: Complex coefficients by the Nash GA with the four-element array
Element 1
Element 2
Magnitude Weight 0.552 1
Time Delay Correction(m) -0.3001 0

55
Figure 3.8: Measured beampattern with 4 element array at 500Hz
The complex coefficients produced by the Nash GA were able to satisfy the
requirements of the beampattern with a sidelobe level about -20 dB or less.
3.4 CONCLUSION
The measured beampatterns showed that the near-field beamforming algorithm
based on the Nash GA worked well at the design frequency when measured in an
anechoic chamber. The hardware-preferred code provides the convenience of using the
values directly as input data to the computer. The weakness of this method may appear
when the selected and coded cost functions are wrong. Most remarkable in this work is
that a small array with element spacing less λ4/1< and length of 1 and λ4/1 at low
frequency produces the correct beamwidth and gives a sidelobe level down by -20dB.
This type of array can be employed in small cabins, such as that in an automobile. It is
expected, moreover, that this method can improve the signal-to-noise ratio when

56
background noise (noise from the engine, wind, and tire/road friction) is present inside
the car.

57
Chapter 4
Implementation of Array with Constant Beamwidth
4.1 CONSIDERATIONS OF BROADBAND BEAMFORMER
The beamforming technique described in Chapter 3 provides the basis for
constant beamwidth methods for broadband signals. Voice is a broadband signal. For
better speech intelligibility, a bandwidth from 300 Hz to 8 kHz is desired. In Dr. Hixson’s
work on the harmonic nested array [33, 34, 35, 36], far-field beamforming methods were
used. Filter techniques were used to keep the half power beamwidth (HPBW) constant
within the frequencies of interest. Because each harmonic nested array has the same
HPBW at corresponding center frequencies an octave apart, subarrays can be added with
appropriate filter functions. As shown in Figure 3.7, however, the HPBW changes
nonlinearly with frequency in the near-field since the solution itself is nonlinear.
Therefore, the approach to this problem must be reconsidered when this beamforming
method is used.
Before steps are given for realizing the digital filters for broadband beamforming,
several constraints should be considered for near-field broadband beamforming. Those
constraints, which were first identified in Hixson and Adorno [34], relate to the
following:
1. The number of subarrays
2. The number of elements of each subarray
3. Desired half power points

58
4. The desired controlling frequency range
5. Sampling capability of the hardware
Constraints 1, 2, and 3 relate to the physical size of the total array. Constraint 3 is
chosen to receive the energy of the voice signal, and, at this point, the amplitude of a
normalized gain function is unity as a reference. Too broad a HPBW value would not
reject surrounding noise, while too narrow a HPBW value would not allow small
movements of the source. An adequate frequency range to receive a voice signal of 250
Hz to 4000 Hz was chosen.
As for Criterion 4, the far-field array, as designed in the next section, can control
the beamwidth within an octave band, that is, fo to 2fo. The design frequency range is
divided into two categories, the controlled band and the uncontrolled band. In this
situation, the frequencies within 500 Hz to 2000 Hz are the controlled band, and the
frequencies within 250 Hz to 499 Hz and 2000 Hz to 4000 Hz are the uncontrolled bands.
Criterion 5, one of most important factors, is directly related to the time delay
from a source to a microphone. Let the sampling frequency fs = 10 kHz for receiving a
voice signal. The time interval for sampling is 100µs, and, when converted to a distance
domain, the distance interval is 3.4 cm. The difference between the traveling distances
from the source to the adjacent microphone must be greater than 3.4 cm. This constraint
can be a problem in a narrowly spaced array, because the time-delay differences between
elements are very small compared to the time interval of the sampling frequency. For the
near-field array designed in this study, a sampling frequency of fs = 16 kHz is used. In
the far-field array, the subarrays have exactly the same array responses at each octave
frequency; however. the exact harmonic nested array will not be used for this application,

59
because the element locations are determined by the Nash GA. This approach will be
discussed in detail later.
4.2 CONSTANT BEAMWIDTH IN THE FAR FIELD
This section describes the operation of a filter design for a far-field array. This
method for maintaining the constant beamwidth of a farfield array was suggested by
Hixson and Holden in 1972 [63]. The main idea in controlling the HPBW is to keep the
gain constant at the location of the HPBW. To do so, the arrays should have the same
bandwidth at each reference frequency. The frequency range of interest is from fo to 2fo.
As the operating frequency increases or decreases in this frequency range, the HPBW
becomes smaller or wider, respectively. The idea is that, if the gains of Subarrays A and
B are summed up after multiplying by appropriate filter functions, the on-axis total gain
in this frequency range becomes unity, and the half power point stays constant (see
Figure 4.1).
Figure 4.1: One example of array alignment.

60
Given the alignment of arrays in Figure 4.1, the directivity function of each array is
expressed in Equation 4.1.
)sin2
sin(5
)sin25sin(
),(
0
0
θπ
θπ
θ
ff
ff
fD = (4.1)
The relation between the transfer function and directivity can be defined by the following
equations.
)2,0(1)(),()(),( offoffRfDfRfD bbaa <<°==+ θθθ (4.2)
)2,(2
1)(),()(),( ffoffRfDfRfD Bbbaa <<==+ θθθθ (4.3)
where Ra(f) and Rb(f) are the transfer function for each array, and the directivity functions
are as follows:
)sin4
sin(5
)sin4
5sin(
),(
)sin2
sin(5
)sin2
5sin(
),(
θπ
θπ
θ
θπ
θπ
θ
offoff
fbD
offoff
faD
=
=
The required filter functions are then as follows:

61
11
11
1 4coscos
2cos2cos22
521
)(GG
GGfR
−
++−= (4.4)
11
11
2 cos4cos
4coscos22
521
)(GG
GGfR
−
++−= (4.5)
)(1)(and 12 fRfR −= (4.6)
where offG
21π
= .
These filters are shown in Figure 4.2. Figures 4.3 through 4.6 shows constant beamwidths
from 500 Hz to 1000 Hz. In Hixson and Holden [63], the filter functions were not
physically realizable with analog circuit components, but they can now be realized and
implemented. The next section describes the design of DSP filter functions for the near-
field array.
500 550 600 650 700 750 800 850 900 950 10000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Operating Frequency(Hz)
Rel
ativ
e G
ain
Figure 4.2: Gain transfer function of far-field array.
Ra(f)
Rb(f)

62
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
sub-array 'A'sub-array 'B'sum (A+B)
Figure 4.3: Total directivity pattern of Subarray A and B at f = 500 Hz.
0.2
0.4
0.6
0.8
1
30
210
60
240
90
270
120
300
150
330
180 0
sub-array 'A'sub-array 'B'sum (A+B)
Figure 4.4: Total directivity pattern of Subarray A and B at f = 750 Hz.

63
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
sub-array 'A'sub-array 'B'sum (A+B)
Figure 4.5: Total directivity pattern of Subarray A and B at f = 1000 Hz.
4.3 CONSTANT BEAMWIDTH IN THE NEAR FIELD
Unlike the directivity gain function for a far-field array, the function for a five-
element near-field array is expressed as a sum of the pressures having weighted and
phase-addition factors, as in Equations 4.6 and 4.7. Most important for the transfer
function of the near-field array is that the magnitude terms are not cancelled, and
magnitude is a variable for controlling the beampattern.
)))(((5
1 )(1),( anan
anan
aMxrktje
nW
xrfxD +−
∑=
⋅⋅= ω (4.6)
)))(((5
1 )(1),( bmbm
bmbm
bMxrktje
mW
xrfxD +−
∑=
⋅⋅= ω (4.7)

64
where Wan and Wbm are weights for magnitude correction, Man and Mbm are phase
corrections, and ω is the angular frequency. When the filter directivity function is
defined as in Equation 4.8,
)(),(),( fRfxDfxDF ⋅= (4.8)
The constraints for the constant beam with respect to HPBW can be defined by Equations
4.9 and 4.10.
)2,0(1),(),( 000 offofmxfxDFfxDF ba <<==+ (4.9)
)2,1.0(2
1),(),( offofmxfxDFfxDF bbbba <<±==+ (4.10)
)(),(),( fRfxDfxDF aaa ⋅=
)(),(),( fRfxDfxDF bbb ⋅=
As a result, the transfer function is defined in Equations 4.11 and 4.12.
),(),(2
1),()(
fxDfxD
fxDfR
babb
ba
a −
−= (4.11)
)(1),(),(
21),(
)( fRfxDfxD
fxDfR a
bbba
ba
b −=−
−= (4.12)
As discussed in the previous chapter, the near-field array has a shorter length and phase
corrections for each array element. These features clearly differentiate the near-field array

65
from the far field. Therefore, influences or problems arising from those two features must
be understood before the coefficients are derived.
Problems from Shorter length array
Note that the transfer functions could be obtained for broadband beamforming
because the HPBW changed monotonically or linearly when the frequencies varied. The
monotonic variation of HPBW in the near field is questionable when the shorter array is
used. Figure 4.6 shows the variation of beam shape with frequency. As a result, the
transfer functions may fluctuate, and this fluctuation may cause the sum of the transfer
functions to be over or below unity. Even though the beampattern satisfies the constraints
in Figure 4.6 (a), the sidelobe level (SLL) may be higher than the main lobe at high
frequencies, as shown in Figure 4.6 (c).
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
(a)

66
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
(b)
500 550 600 650 700 750 800 850 900 950 1000-15
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Frequency(Hz)
dB
(c)
Figure 4.6: Nonlinearity of variation of HPBW. (a) Beam pattern at 500Hz. (b)
Beam pattern at 850Hz. (c) HPBW with varying frequencies.

67
Since this method has no constraints for SLL, combining responses from two arrays may
make SLL higher with varying frequencies. To keep SLL low within the frequencies of
interest, the complex coefficients that result in higher SLL should be avoided. Therefore,
this kind of filtering was added to the Nash GA then the difference of center frequencies
of each array is less than one octave but that will become wider at higher center
frequencies, the distance between a source and receiver approaches the far-field
condition.
Problems from Phase Corrections
In the far-field array, the phase response is of no interest, because the acoustic
sound waves from each array element are in phase in the look direction, and, as a result,
the outputs of two arrays are also in phase. Therefore, the total array response is the
algebraic summation multiplied by the corresponding filter function. For the near-field
array, however, each element has its own phase correction, which may cause the array to
phase shift. The worst case may occur when the array responses from two arrays have
opposite phases at certain frequencies. Therefore, phase responses must be observed to
construct the near-field array with proper beampattern.
The on-axis array frequency response in Figure 4.7 was obtained combining array
‘A’ and ‘B’ with the complex coefficients based on the information above. This response
shows serious problem in that a null is created at 600 Hz, and the difference between
maxima and minima is more than 14 dB. Figure 4.8 provides the clear explanation that
even when the amplitudes of the beampatterns are the same, the phases are opposite, and,
finally, the outputs from the two arrays are cancelled. As a result, the sidelobe level is
even higher than the main lobe.

68
500 550 600 650 700 750 800-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
Frequency(Hz)
Rel
atiiv
e ga
in(d
B)
Figure 4.7: Array gain without consideration of phase cancellation.
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
Array 'A'Array 'B'
(a)

69
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-3
-2
-1
0
1
2
3
x(m)
Gai
n(dB
)
Array 'A'Array 'B'
(b)
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
(c)
Figure 4.8: Array response cancellation at 600 Hz. (a) magnitude response (red:
array ‘A’, blue: array ‘B’). (b) phase response. (c) total array response
of array ‘A’ and ‘B’.

70
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
(a)
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-3
-2
-1
0
1
2
3
x(m)
Gai
n(dB
)
Array 'A'Array 'B'
(b)
Figure 4.9: ‘In phase’ status within HPBW region at 600Hz. (a) total array
response of array ‘A’ and ‘B’ (b) phase response (red: array ‘A’, blue:
array ‘B’)

71
To prevent phase cancellation, complex coefficients must be filtered again in a post-
processing stage. In conclusion, the array constraints can be mathematically defined as
follows: (1) ),25.0(),(),( 21 HPBWHPBWccc xxxffffxHfxH ≤≤−≤≤=
(2) ),25.0(),(),( 21 HPBWHPBWccc xxxffffxHfxH ≤≤−≤≤∠≅∠
It is clearly seen that relatively small phase error is negligible in Figure 4.9.
The microphone array alignment for frequencies from 250 Hz to 8 kHz is shown in
Figure 4.10. L=0.8575m
d = λ /16 = 0.043m ( λ = 343/500 )
10a 9a 8a 7a 6a 5a 4a 3a 2a 1a 0 1b 2b 3b 4b 5b 6b 7b 8b 9b 10b
Array‘A’
Array‘B’
Array‘C’
Array‘D’
Array ‘A’ : 250 ~ 800 Hz (fc = 500Hz)Array ‘B’ : 500 ~ 1800 Hz (fc = 800Hz)Array ‘C’ : 800 ~ 4000 Hz (fc = 1800Hz)Array ‘D’ : 1800 ~ 8000 Hz (fc = 4000Hz)
Figure 4.10: Finalized microphone array alignment.
The setup above is one example of optimized microphone alignment when the fewest
number of microphones is considered. The beampatterns at center frequencies determined
by complex coefficients for each array are shown in Figure 4.11.

72
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
Array 'A'Array 'B'Array 'C'Array 'D'
Figure 4.11: Beampattern at center frequency for each array.
Finally, most beampatterns are wider than required except for that of Array D. The
corresponding complex coefficients to obtain these beampatterns are shown in Table 4.1.
Table 4.1: Complex coefficients for each array
#1 #2 #3(center) #1 #2 #3(center)A 0.317 0.054 1.000 0.472 0.386 0.000B 0.005 0.071 1.000 0.343 -0.043 0.000C 0.238 0.361 1.000 0.000 0.000 0.000D 0.015 0.836 1.000 0.300 0.000 0.000
Magnitude Weight Phase Correction(m)Array
Imposition of the constant beamwidth condition compromises the beamwidth and
sidelobe conditions of an individual array. Note that, while the magnitude of output at a

73
focal point is one integer (the number of microphones) times greater than that of a single
microphone, this is not true in the near-field. The final output of the near-field array is a
complex combination of the distance correction of each microphone and the focal point,
magnitude weight, and phase correction. Therefore, the relative amplitude of the focal
point for each array shows the difference given in Figure 4.12. As shown in the next
section, however, the sidelobe level with varying frequency stays about -20dB. This problem can be removed by adding an amplitude equalization filter ( eqH ) to the
broadband beamformer. The corrected array response is described in Appendix C.
)()()( fHfHfH bbeqTOT += (4.13)
Based on the data above, the broadband beamforming filter for each array is shown in
Figure 4. 13.
500 1000 1500 2000 2500 3000 3500 4000-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Frequency(Hz)
Freq
uenc
y R
espo
nse
at fo
cal p
oint
(dB
)
Figure 4.12: Frequency response at focal point.

74
250 500 800 1800 4000 6000 8000
0
0.2
0.4
0.6
0.8
1
Frequency(Hz)
Gai
n
H1(f)H2(f)H3(f)H4(f)
Figure 4.13: Broadband beamforming filter for each array.
4.4 REALIZATION OF FILTERS AND SIMULATIONS
To proceed in this study, the concept of digital or discrete signal processing must
be introduced. In Section 4.3, the ideal transfer function in the frequency domain was
obtained. To find the transfer function in the digital domain, several factors are
considered.
① Filter type : FIR or IIR
② The number of taps for Inverse FIR or IIR
③ Order of filter coefficient
④ Locations of poles and zeros

75
Before these factors are dealt with, however, note that the theoretical aspect of DSP will
not be investigated, but the effectiveness of these factors will be compared and
investigated according to the goals of this study.
There are two important criteria in choosing the filter type, quantization noise and
stability. It is clear after several computational simulations that the IIR filter with a
relatively low order is closer to the ideal filter shape than the FIR filter. Why do so many
acoustic filters employ the FIR type? Even though the IIR filter requires less memory and
less calculation, quantization errors accumulate, so that the clarity of the voice worsens as
the quantization noise is fed back to input and amplified again [6]. The IIR filter may
become unstable, because it has several poles and zeros. In addition, it has a nonlinear
phase. Meanwhile, the FIR filter is always stable and has an exact linear phase, but it has
the disadvantage of needing more memory allocation and more arithmetic calculations
[6]. However, the hardware, that is, the CPU and memory, is adequate to solve array
problems. Finally, the FIR filter with 80 orders of coefficients was selected after the
process of optimization. The computational software (Matlab, which is programmed by
Mathworks) is amply capable of calculating coefficients by using the ideal transfer
functions H1(f), H2(f), H3(f), and H4(f), which were obtained in Section 4.3. Figure 4.14
shows the procedure for finding the real transfer function by using Matlab software.
Figure 4.14: Matlab functions for finding the real transfer function
Finding the coefficient b b=firls(30, F, Amplitude) by using the ideal transfer function (30 order)
Finding the real transfer function [H,w]=freqz(b,1,1024) by using coefficient a(=1) and b ( the number of tap : 1024)

76
In particular, the ‘FIRLS’ function is used to design the linear-phase FIR filter
using the least-squares error minimization [64]. The FIR filter is designed that gives the
best approximation of the desired frequency response described by F and A in the least
squares sense. The term F is a vector of frequency band edges in pairs, in ascending order
between 0 and 1. The term 1 corresponds to the Nyquist frequency or half the sampling
frequency. The term A, which is a real vector the same size as F, specifies the desired
amplitude of the frequency response of the resultant filter B. In spite of a tradeoff
between the order of filter coefficients and the processing time, the total response shows
that the tolerance should be of the order ±1 dB. This means that the locations of the -3 dB
HPBW points may change slightly with the operating frequency, but that the small
changes are negligible. The comparison of the digital filter responses to the desired
transfer functions are shown in Figure 4. 15.
300 400 500 600 700 800 900 1000-80
-70
-60
-50
-40
-30
-20
-10
0
10
Frequency(Hz)
Gai
n(dB
)
Digitalized filterTransfer function
(a) H1( f ) (order = 70)

77
500 1000 1500 2000-80
-70
-60
-50
-40
-30
-20
-10
0
10
Frequency(Hz)
Gai
n(dB
)
Digitalized filterTransfer function
(b) H2( f ) (order = 70)
500 1000 1500 2000 2500 3000 3500 4000 4500 5000-80
-70
-60
-50
-40
-30
-20
-10
0
10
Frequency(Hz)
Gai
n(dB
)
Digitalized filterTransfer function
(c) H3( f ) (order = 70)

78
2000 3000 4000 5000 6000 7000 8000-80
-70
-60
-50
-40
-30
-20
-10
0
10
Frequency(Hz)
Gai
n(dB
)
Digitalized filterTransfer function
(d) H4( f ) (order = 70)
1000 2000 3000 4000 5000 6000 7000 8000-3
-2
-1
0
1
2
3
Frequency(Hz)
Gai
n(dB
)
Digitalized filterTransfer function
(e) Total response H( f ) (order = 70)
Figure 4.15: Realized filter of )( fH .

79
The beam patterns with varying frequencies are shown in Chapter 5. Note that the
HPBW is slightly wider than the constraints at low frequencies, while the HPBW at
higher frequencies comes close to the requirement. It is roughly thought that this is a
result of a tradeoff between the HPBW and SLL. It is clear that the SLL keeps the level
low from 500 Hz to 4 kHz.
4.5 SYSTEM DESIGN
From now on in this study, the system design with analog components, PCI-4472
sampling devices, and Labview software will be considered along with the given
information. To implement this system with digital signal processing, it is necessary to
analyze the whole system and select the components that are required for the Near-Field
Microphone Array System.
Figure 4.16 is a diagram of the system including four filters.
10 9 8 7 6 5 4 3 2 1 0
∑ ∑ ∑ ∑
H1(f) H2(f) H3(f) H4(f)
∑
Figure 4.16: System Diagram.

80
This system consists of three parts: an analog input part, a digital signal processing part,
and an analog output part. In the first step of this system’s operation, the analog input part
receives the analog signals through the receiving elements, that is, the microphones, and
then transforms the signals to digitalized signals in the PCI-4472 as shown in Figure 4.17.
First, electret condenser microphones (Model No : WM-034CY, manufactured by
Panasonic) were used as the receiving elements. Their nominal sensitivity is –42 dB ± 3
dB (0 dB = 1V/pA at 1 kHz). The standard operating voltage is 4.5 V (max 10 V), the
directivity is omni-directional, and the output impedance is less than 2.2 kΩ. The
frequency response is flat over the range of 20 Hz to 16 kHz. After the amplitudes were
measured by using the General Radio Sound Level Calibrator (Type: 1562-A), it was
shown that the differences between the amplitudes were less than 1 dB.
Figure 4.17: Typical circuit diagram of the microphone and driver.
Before 11 microphones were used for the system, calibration was needed to verify
the gain of each microphone. The QC-20 calibrator manufactured by Quest Electronics
P C I - 4 4 7 2
TLC2264IN
WM-034CY
Vcc(6 V)
+
-
100kΩ
10kΩ
0.1μF
22kΩ1kΩ

81
was used for this procedure. The reference of sound level pressure was 94 dB re 20 μPa,
and the results were measured at 250 Hz and 1 kHz, as shown in Table 4.2.
Microphones with ± 0.1dB error were chosen for precise implementation. The
level differences between them were overcome by increasing the gain from each
microphone with respect to the reference microphone #26. For mass-production, this
procedure must be reconsidered. The gain difference between microphones may be
critical in implementing the beamforming. Small difference may cause large distortions
or unwanted beampatterns at high frequencies, while change at low frequencies may be
negligible. Calibrating numerous microphones is questionable and even more impractical.
Table 4.2: Microphone calibration data
250 Hz 1000 Hz1 -5.5 -5.5 0.0 o 10a2 -6.0 -6.8 0.83 -4.7 -5.0 0.34 -7.3 -7.4 0.1 o 10b5 - - - -6 -8.7 -8.7 0.0 o 8b7 -6.1 -6.1 0.0 o 5a8 - - - -9 -6.0 -6.0 0.0 o 5b10 -5.0 -5.2 0.211 -5.5 -5.8 0.312 -6.3 -6.2 0.1 o 3b13 -8.0 -8.0 0.0 o 8a14 - - - -15 -5.4 -5.6 0.216 -4.6 -5.0 0.417 - - -18 -7.3 -7.5 0.219 - - - -20 -7.7 -7.9 0.221 -5.6 -5.6 0.0 o 1b22 -6.6 -6.4 0.223 -6.0 -6.0 0.0 o 3a25 -5.4 -5.4 0.0 o 1a26 -4.9 -4.9 0.0 o 0
Location# of Mic. Level (dB) Difference Selection

82
Another preamplifier circuit can be employed in this situation [65]. The characteristic of
electret microphone voltage with SPL is quite linear, while a FET inside a microphone
capsule with a given connection between three terminals may cause nonlinearity. If the
circuit is modified by changing the connection to use the FET as a follower, as shown in
Figure 4.18, the microphone will have a quite flat frequency response with stable level.
(a) Traditional circuit
(b) Modified circuit
Figure 4.18: Modified circuit for a pre-amplifier.

83
For the source follower, the output (source) will follow the input. If the source resistance,
RL, is much greater than 1/gm, the output will be the same as the input voltage. Here, the
traditional circuit is used, and weights for each microphone are obtained to make the
gains equal between the microphones with respect to No. 26.
Table 4.3: Selected microphones and weights for each microphone.
250 Hz 1000 Hz26 -4.9 -4.9 0.0 1.00 025 -5.4 -5.4 0.0 1.05 1a1 -5.5 -5.5 0.0 1.07 10a21 -5.6 -5.6 0.0 1.08 1b9 -6.0 -6.0 0.0 1.13 5b23 -6.0 -6.0 0.0 1.13 3a7 -6.1 -6.1 0.0 1.14 5a12 -6.3 -6.2 0.1 1.14 3b4 -7.3 -7.4 0.1 1.30 10b13 -8.0 -8.0 0.0 1.41 8a6 -8.7 -8.7 0.0 1.55 8b
Location# of Mic. Level (dB) Difference Weight

84
CHAPTER 5
IMPLEMENTATION OF THE MICROPHONE ARRAY
5.1 OUTLINE
As described in Chapter 3, the measurements were implemented mainly with
Labview 7.1 and Matlab R14 with two analog sampling devices, PCI-4472.
For the analog input stage, the pre-amplifier with 11 channels shown in Figure 5.1
was used to detect the signals at the fixed locations. This amplifier was battery-powered
to remove any possible signal distortion from the power supply. Because each
microphone had a slightly different frequency response, their gains were normalized to
the center element.
Figure 5.1: Pre-amplifier with 16 channels.

85
The microphones were sampled simultaneously at 16 kHz, meaning that there was
no interchannel time delay. This sampling ensured the initial performance of the
microphone array, which depended on time delays between elements. To remove the time
difference between two DAQ boards, they had to be synchronized by using the bus cable.
Several factors for the input stage, the sampling frequency, the input range, the number of
samples, and the number of channel, were controlled by the analog configuration in the
Labview software.
At the digital filter stage, the sampled signals encountered a series of filters. The
complex coefficients and the initial arrangement of the array elements performed spatial
filtering. Then the signals were passed through constant beamwidth filters, an amplitude
equalization filter, and a bandpass filter to attenuate the signals outside the frequencies of
interest. The amplitude equalization filter was used to keep the frequency response flat.
Its implementation is not included because the process is just the addition of another
digital filter. The results of simulation are shown in Appendix C.
To compare the performance of the fixed microphone array in various situations,
the measurements were performed in both an anechoic chamber and a reverberant room.
The beampatterns and the directivity index were obtained. For the qualification test, real
music was used as a source in both situations.
5.2 BEAMPATTERNS IN THE ANECHOIC CHAMBER
The purpose of this measurement was to verify the performance and to compare it
to the results of simulations. Because the frequencies of interest were from 500 Hz to 4
kHz, the data were collected at each octave frequency and logarithmically centered
frequencies. This section shows the beampatterns, and Appendix B gives the measured

86
data. It was expected that the beampatterns would be slightly affected by the structures
inside the anechoic chamber. As a point source, the horn driver in Figure 5.2 was used.
For best results, the microphone array in Figure 5.3 was used; tables and the source were
located in the center of this room, as shown in Figure 5.4. In addition, the interior of the
pipe used for the casing of the microphone ar ray was filled with a glass fiber to remove
resonances.
Given the complex coefficients in Chapter 4, it was found that the amplitudes of
certain coefficients were small and may not affect the performance. Based on this
assumption, a new setup for nine microphones was designed as shown in Table 5.1 and
compared to the 11-channel array. Figure 5.5 compares the beampatterns to the 11-
channel array.
Figure 5.2: Horn Driver as a Point Source.
Figure 5.3: Microphone Array as a Receiver.

87
Table 5.1: Complex coefficients for a nine-channel microphone array.
#1 #2 #3(center) #1 #2 #3(center)A 0.317 1.000 0.472 0.000B 0.071 1.000 -0.043 0.000C 0.238 0.361 1.000 0.000 0.000 0.000D 0.015 0.836 1.000 0.300 0.000 0.000
Magnitude Weight Phase Correction(m)Array
Figure 5.4: Set-up for the measurements in the anechoic chamber.

88
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(a) Beam pattern @ f = 500Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(b) Beam pattern @ f = 630Hz

89
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(c) Beam pattern @ f = 800Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(d) Beam pattern @ f = 1200Hz

90
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(e) Beam pattern @ f = 1800Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(f) Beam pattern @ f = 2700Hz

91
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured(11ch)Measured(9ch)
(g) Beam pattern @ f = 4000Hz
Figure 5.5: Beam Patterns in an Anechoic Chamber.
Though the directivity patterns measured in an anechoic chamber shows small difference
from simulated ones, it can be concluded that the near field beamformer with Nash GA
works well. It is guessed that these acceptable differences may be due to accumulated
errors from an analog circuit to digital signal processing stage through PCI-4472.
5.3 BEAMPATTERNS IN THE REVERBERANT ROOM
The closest example of the reverberant room may be a classroom consisting of
hard walls on all sides, a projector screen, large square tables, chairs, and thick carpet on
the floor, as shown in Figure 5.6(a).

92
(a) Class Room.
(b) Microphone Array Set-up for Reverberant Room
Figure 5.6: Reverberant room.
The reverberant times were measured in this room to determine how reverberant
the room was compared to the interior of a car. The values are shown in Table 5.2.

93
Table 5.2: Reverberation Time (RT60)
Frequency 500Hz 1kHz 2kHz 4kHz
RT60(ms) 356 329 299 391
While the car interior had a reverberant time less than 150 ms, this classroom had
longer RT60. It could be predicted that the results would be worse than those of a car’s
interior.
The measured beampatterns are shown in Figure 5.7.
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(a) Beam pattern @ f = 500Hz

94
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(b) Beam pattern @ f = 630Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(c) Beam pattern @ f = 800Hz

95
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(d) Beam pattern @ f = 1200Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(e) Beam pattern @ f = 1800Hz

96
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(f) Beam pattern @ f = 2700Hz
-0.6 -0.4 -0.2 0 0.2 0.4 0.6-30
-25
-20
-15
-10
-5
0
x(m)
Gai
n(dB
)
SimulatedMeasured
(g) Beam pattern @ f = 4000Hz
Figure 5.7: Beampatterns in the reverberant room

97
Several conclusions can be stated when the directivity patterns above were analyzed here.
First, the sidelobe level seems to be increased because the reflected sound from several
paths flows in main lobe region. Secondly, the directivity patterns show non-symmetrical
sidelobe. The room modes at certain frequencies may affect the performance of this
microphone array system.
5.4 COMPARISON OF DIRECTIVITY INDEX VALUES
The directivity index is a measure of the degree to which the available acoustical
power may be concentrated in a given direction, as defined by Blackstock [56]. When the
acoustic intensity is defined by Equation 5.1,
00
2
00
* ˆ2 c
pc
PPIρρ
== (5.1)
where *P is the complex conjugate of P and p represents rms pressure, the intensity
directivity factor and the directivity index are
avei I
ID max= (5.2)
iDDI 10log10= (5.3)
Suppose a specified sound pressure level arraySPL is measured by the array at a given
distance r = 0.3 m from a source and omniSPL is also measured from a single

98
microphone. Given the available acoustical power W, the intensity measured by one
microphone is
24 rWIomni π
= (5.4)
The rms pressure omnip is
200
00 4ˆ
rWc
Icp omniomni πρ
ρ == (5.5)
For the far-field array,
DISPLDSPL
pp
pp
pp
SPL
omni
iomni
omni
array
ref
omni
ref
arrayarray
+=+=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
10
2
1010
2
10
log10
ˆlog10
ˆlog20
ˆlog10
Since NSPLSPL omniarray 10log20+= where N is the number of array element,
omniarray SPLSPLDI −= N10log20= (5.6)
Since the directivity cannot be expressed by the function N for the near-field array, the
directivity index at the focal point in this case can be defined as
omniarray SPLSPLDI −= (5.7)
When measured in an anechoic chamber, the directivity index was as shown in Figure
5.8.

99
500 1000 1500 2000 2500 3000 3500 40000
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Frequency(Hz)
Dire
ctiv
ity In
dex(
dB)
Anechoic ChamberReverberant Room
Figure 5.8: Directivity Index.
5.5 QUALIFICATION TEST USING REAL DATA
This test was used for evaluating the performance for a real signal, that is, the
sound of a voice or music. One sample of a music file of 10-second duration was played
and recorded using a single microphone and microphone array in the anechoic chamber
and the reverberant room with the possible source locations as shown in Figure 5.9. All
graphs from measurements are plotted by using power spectral density (PSD) with aid of
‘pwelch’ which is a built-in function in Matlab. The measurement comparisons (Figure
5.10) in the reverberant room show that there is no perceivable change of music quality
due to distortion or noise. Though they have different amplitudes due to array gain and
reverberant components, they still have similar shape.

100
Figure 5.9: Setup for measurements.
0 1000 2000 3000 4000 5000 6000 7000 8000
-120
-100
-80
-60
-40
-20
0
Frequency(Hz)
Pow
er S
pect
ral D
ensi
ty (d
B)
x = 0m, anechoic, singlex = 0m, anechoic, arrrayx = 0m, reverb, singlex = 0m, reverb, array
Figure 5.10: Power spectral density of recorded signals.
Room modes are determined by the size of room, the frequency and the location
of a source. The followings are measured when the source is located off the center axis at
x = -0.7m
0.3m
x = -0.35m
CTR
x = +0.35mx = +0.7m

101
x = -0.3m and x = +0.3m with an array in the reverberant room. The PSDs in Figure 5.11
showed the similar patterns. But at certain frequencies (green circles), the differences
between the amplitudes are 5dB to 10dB.
0 1000 2000 3000 4000 5000 6000 7000 8000
-120
-100
-80
-60
-40
-20
0
Frequency(Hz)
Pow
er S
pect
al D
ensi
ty (d
B)
x = -0.3x = +0.3
Figure 5.11: Comparison of two measurements with an array in reverberant room.
Since the goal of this study is to increase signal to noise ratio in the near field,
Figure 5.12 and 5.13 provide the implicative information about signal to noise ratio by
measuring the PSDs with single microphone and microphone array at x = 0m and x =
+0.7m in the reverberant room. The measurements (see Figure 5.12) show the small
difference at two locations while the PSDs for an array (see Figure 5.13) indicate clearly
greater difference at two locations. From these results, the signal to noise ratio for the
array is increased by about 15dB.

102
0 1000 2000 3000 4000 5000 6000 7000 8000
-120
-100
-80
-60
-40
-20
0
Frequency (Hz)
Pow
er S
pect
ral D
ensit
y (d
B)
x = 0mx = 0.7m
Figure 5.12: PSDs at x = 0m and x = 0.7m with single microphone.
0 1000 2000 3000 4000 5000 6000 7000 8000
-120
-100
-80
-60
-40
-20
0
Frequency (Hz)
Pow
er S
pect
ral D
ensit
y (d
B)
x = 0mx = 0.7m
Figure 5.13: PSDs at x = 0m and x = 0.7m with an array.

103
CHAPTER 6
CONCLUSION AND FUTURE WORK
6.1 CONCLUSION
This study has focused on the optimized solution of the near-field microphone
array in Cartesian coordinates with a linear arrangement for a special application, namely,
the placement of a hands-free cell-phone set inside a vehicle.
As a preparatory step, the sound field analysis was performed with Femlab.
Femlab, which uses the finite-element method, divides the entire region to be analyzed
into a finite number of meshes. To include enough information for the field analysis, the
size of one mesh should be less than a quarter wavelength at the operating frequency of
interest. Intuitively, for the precise analysis at a higher frequency, more memory is
required. Since the frequencies of dominant noises are near 500 Hz, it was possible to
perform the analysis within computational limitations, such as the memory and software
of a Window-based operating system. It was proved that the sound field inside a car
generated by several noise sources is diffusive. From this result, it was expected that a
linear array of microphones would be an effective technique for enhancing the signal-to-
noise ratio.
As discussed in Chapter 1, the microphone array system was to be used for the
near field inside a car. An investigation of source movement required the use of Cartesian
coordinates for the analysis of the microphone array, which has never been done in
previous works. With sidelobe suppression and the control of half-power beamwidth, the
method provided essential filtering against stationary noise and even nons-tationary noise

104
or noise bursts in very short time scales. The Nash genetic algorithm, which provides
multi-objective genetic solutions, found solutions that yielded the complex coefficients of
magnitude weight and time delay correction for each element. According to the given
criteria, the algorithm searched the range of possible solutions globally and tracked the
optimized solutions.
Because the voice is a broadband signal, several subsets of the array were used to
construct the broadband array. The constant beamwidth technique invented by Hixson
was used to cover all frequencies of interest. This process consisted of low-pass, band-
pass, and high-pass filters for corresponding subarrays, but the combination of these
filters was not simple because of possible phase cancellation between any two subarrays,
resulting in a total response cancellation or attenuation. To solve this problem, a phase
correction process was added to the algorithm, as discussed in Section 4.3.
Measurements were made in an anechoic chamber and a reverberant room with an
RT60 of 300 ms. The results from the anechoic chamber showed close correspondence to
data from simulations. Because room reverberation, room mode, and the objects in the
room affected the sound fields in the reverberant room, the performance of this array was
somewhat degraded at certain frequencies; however, the qualitative test by using the
power spectral density of a recorded music showed a clear difference between the results
of single microphone and a microphone array..
6.2 IMPLICATIONS FOR FUTURE RESEARCH
To improve the signal-to-noise ration in three-dimensional space, the microphone
array can be expanded to a two-dimensional Cross or T type of array, as shown in Figure

105
6.1 The graphs in Figure 6.2 show simulated responses in the X and Y directions. Both
arrays used the same coefficients as those of the line array.
Figure 6.1: Shape of Cross and T arrays.
Figure 6.2: Comparison of beampatterns of two-dimensional array for the center
frequency 500 Hz

106
Generally, for far-field arrays, the addition of the Cross array enhances signal-to-
noise ratio in 3-D space, and the original shape of the beampattern along the direction of
the line array is not changed. Those comparisons do not hold, however, for the near field.
As shown in Figure 6.2, the Cross array interferes with the reduction of the sidelobe level
in the X direction. In the Cross array, improvement in the signal-to-noise ration in the y
direction causes an increase of half power beamwidth in the y direction. The T array is a
tradeoff between the line array and cross array. This array has some benefits for hands-
free operation if the main sound source is the driver of the vehicle and if it is desired to
block conversation from the rear seats.
Another possibility for keeping the same or similar beampattern in any direction
as that of the line array in the X direction is to optimize the complex coefficients for
every array element, given the requirement of the three-dimensional beampattern. This
approach results in more complicated cost functions and an increase of optimizing time.
To obtain higher signal-to-noise ratio by rejecting stationary noise, such as engine
noise, combined adaptive beamforming techniques could be used. While the near-field
beamformer reduces the diffuse noise spatially from the desired signal, the combined
filter would remove the stationary noise added through the channel by stages. This
beamformer requires more memory and a faster CPU to accommodate the increased
amount of computation.
Meanwhile, enhancements can be made to the algorithm that finds the optimized
placement and complex coefficients for each array. In this study, these procedures
consisted of stages for determining the spacing between elements with the exhaustive
method and then deriving the complex coefficients. This approach entails factors like
sampling frequency and the number and spacing of microphones. It may be expected that

107
the number of microphones can be reduced and that the beampattern can be more
controllable.

108
Appendix A
Verification of Femlab
As discussed in Chapter 2, Femlab is useful software for analyzing the sound field
with the finite-element method. Incorrect usage, however, may produce unreliable data
and mislead the researcher to erroneous results. Therefore, two examples are solved by
Femlab and the analytical method and their results are compared. The first example is a
Helmholtz resonator, which has a specific resonant frequency due to a certain geometry.
Two methods, an analytical and a computational method, will be used to obtain the
frequency response. The second example is an eigenfrequency analysis that shows the
normal mode of the geometry.
A.1 HELMHOLTZ RESONATOR USED AS A FILTER
This example is found in Blackstock’s book [56] on using a Helmholtz resonator
as a sidebranch to a tube.
Figure A.1: Helmholtz resonator used as a filter.
The reflection coefficient is expressed as follows.

109
)(222 221
1
21
1
12
2
jXRZZ
ZZZ
YYY
Rac
ac
acac
ac
acac
ac
++−=
+−=
+−= (A.1)
where Zac1 is the acoustic impedance of tube 1, Zac2 is the acoustic impedance of the
Helmholtz resonator, R2 is the real part of Zac2 , and X2 is the reactive part of Zac2.
Neckac
Chamberacac ZZZ 222 +=
Vjckc
Sl
jω
ρπ
ρρω
200
2000
2++
′= (A.2)
where ω is the angular frequency, 0ρ is the density in air, 0c is the speed of air, k is the
wave number, S is the cross-sectional area of the neck, l′ is the effective length with the
end correction, and V is the volume of the chamber.
When the frequency of the sound wave is equal to the resonance frequency of the
Helmholtz resonator, the reactance X2 vanished. The resonance frequency is in Equation
A.3.
VlSc
f′
=π20
0 (A.3)
In this case, since 12 acZR << , the reflection coefficient is -1 at 0f . That means the
sound at this frequency is reflected back into section1.
In order to perform this analysis with Femlab, the dimensions of the resonator are
given in Figure A.2.

110
1 3
0.41
0.2
0.2
0.1
Figure A.2: Dimensions of the resonator
-1.0
-0.5
0
0.5
-1.01.0
0.5
0
0y x
z
Figure A.3: Modeling of the Helmholtz resonator by using Femlab.

111
The model of the filter is made in Femlab with the dimensions given in Figure A.2. By
using Equation A.3, the resonant frequency is 28.67 Hz. The frequency response in this
duct system is given in Figure A.4, indicating that the two methods show the same result.
Figure A.4: Frequency response from the tube system.
A.2 EIGENMODE ANALYSIS
This example is also found in Chapter 6 of Blackstock’s book [56]. The geometry
in Figure A.5, the rectangular container, is given and the lowest eigenfrequencies is
obtained.

112
Figure A.5: Rectangular container.
The analytical solution is obtained by separation of variables. The intermediate
process is skipped. The solution is given in Equation A.4.
222
0
2⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=
Ln
Wm
Llc
flmn π (A.4)
where l,m,n = 0,1,2,3,········· and c0 the speed of sound in air. The solutions are as
follows.
Hzf 8394.20100 =
Hzf 1332.28010 =
Hzf 0108.35110 =
Hzf 6788.41200 =
Hzf 2852.50210 =
Hzf 2664.56001 =
On the other hand, the solutions from Femlab are shown in Figure A.6

113
Figure A.6: Eigenvalues of the rectangular container from Femlab.
Since the eigenvalues here is defined by 22 )2( f⋅⋅= πω ,
( )Hzf th 8394.20
2709825.17144
21 ==π
( )Hzf nd 1332.28
2465793.31246
22 ==π
( )Hzf rd 0108.35
2938965.48391
23 ==π
( )Hzf th 6788.41
279958.68581
24 ==π
( )Hzf th 2852.50
2053196.99835
25 ==π
( )Hzf th 2664.56
21.125006
26 ==π
Therefore, both results are exactly the same. Even though this example is simpler than
what this study wanted to solve, this provides the basis for further a step.

114
Appendix B
Measurement Data
B.1 MEASUREMENT IN THE ANECHOIC CHAMBER
CTR 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50 0.55 0.60 0.65 0.7090.4 90.1 89.0 87.4 85.1 82.0 78.3 74.0 69.8 68.4 64.2 63.3 62.1 61.9 61.485.0 84.9 84.4 83.8 83.2 82.4 81.6 80.7 79.7 78.8 77.7 76.8 76.1 75.7 75.190.8 90.4 89.1 86.7 84.1 80.6 77.9 77.3 77.3 77.0 76.4 75.6 74.8 74.0 73.286.2 86.2 85.7 84.7 84.3 83.3 82.2 81.0 79.9 78.9 78.1 77.4 77.0 76.5 75.893.4 92.9 91.6 89.7 87.1 83.9 80.4 76.9 74.0 71.8 70.2 68.3 67.4 66.3 66.988.4 88.5 88.1 87.4 86.7 85.6 84.4 83.4 82.7 82.1 81.3 80.3 79.5 79.2 79.299.7 99.3 98.3 96.7 94.3 91.5 88.4 85.7 83.7 82.5 81.3 79.5 78.8 78.3 76.492.5 92.3 91.9 91.3 90.4 89.6 89.0 88.3 87.5 87.0 86.1 84.9 84.5 83.9 82.9102.2 102.3 101.3 99.2 95.6 90.2 83.9 80.8 78.3 77.4 80.0 82.0 83.1 81.9 80.195.0 95.2 94.7 93.8 92.3 91.4 90.8 89.7 84.6 85.6 85.3 85.6 86.2 85.4 84.791.2 91.5 90.6 86.7 76.5 73.2 75.6 74.1 70.8 71.1 73.3 73.2 73.7 74.7 72.085.5 85.4 84.8 84.3 84.5 84.7 84.8 85.0 84.4 83.6 81.7 81.5 80.7 79.4 78.999.8 98.7 95.8 91.4 86.3 74.5 65.6 75.0 75.3 77.3 78.3 77.0 77.5 75.7 78.291.7 91.6 90.4 89.4 88.5 85.0 85.3 83.2 83.5 82.6 82.1 82.1 80.6 79.1 76.8
4000Hz
800Hz
1200Hz
1800Hz
2700Hz
Freq.Measurement point (m)
500Hz
630Hz
(Black: Microphone Array, Red: Single Microphone)

115
B.2 MEASUREMENT IN THE REVERBERANT ROOM
-0.7 -0.65 -0.6 -0.55 -0.5 -0.45 -0.4 -0.35 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 CTR78 78.47 78.54 78.45 78.59 78.27 78.93 80.77 81.7 84.22 85.84 88 89.11 90.35 90.2
78.46 75.62 72.78 75.2 77.94 80.51 81.85 82.49 81.98 81.74 81.91 82.88 83.15 84.26 83.7176.35 77.28 77.15 78.13 79.06 80.28 80.6 80.56 81.72 83.04 84.2 85.8 86.84 87.51 87.4276.89 76.33 77.14 77.35 75.3 75.05 73.25 75.5 76.86 80.81 82.62 84.09 85.14 85.85 85.7577.13 77.77 79.54 81.4 82.86 83.15 83.1 82 81.01 81.75 83.17 85.02 87.15 88.66 88.9479.5 80.13 79.58 81.92 83.43 84.33 83.99 82.86 82.08 84.02 85.04 84.76 85.03 84.12 83.0677.1 79.84 77.62 80.27 85.1 86.24 85.11 85.34 85.46 88.84 91.3 95.15 97.92 99.53 100.2677.22 74.21 73.87 78.61 83.01 83.78 83.51 86.73 87.63 88 88.64 90.68 91.72 91.74 92.2282.61 83.87 76.85 83.88 84.1 88.25 89.83 86.71 82.3 87.42 93.73 97.76 100.17 101.23 101.5377.81 85.23 81.65 86.44 86.21 89.22 90.1 89.12 87.66 86.8 87.12 91.45 93.11 92 91.4677.21 77.39 77 79.22 80.18 79.25 78.3 78.77 77.16 79.45 80.64 83.2 85 85.48 84.879.62 84.81 82.87 81.14 76.64 82.11 82.45 82.27 80.24 82.51 79.89 83.41 81.44 82.45 79.778.5 77.8 83.25 77.58 79.42 79.75 80.62 79.63 79.8 84.12 86.2 90.67 93.43 95.1 97.1675.29 79.5 77.68 83.94 82.3 82.03 80.2 81.32 81.11 76.27 85.55 86.57 88.63 88.45 88.7
Freq.Measurement point(m)
500Hz
630Hz
4000Hz
800Hz
1200Hz
1800Hz
2700Hz
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.790.25 88.92 87.37 85.4 82.3 80.2 78.99 77.3 77.7 76.65 76.78 76.35 76.7 76.64
84 93.05 82.09 81.53 81.16 81.08 82.32 81.8 81.46 81.56 81 79.88 78.46 77.8987.25 86.44 84.95 82.8 80.8 77.97 76.9 77.3 77.69 78 77.46 76.33 76.8 77.286.27 85.84 85.54 84.36 82.64 81 79.38 79.23 79.6 80.45 80.12 78.35 75.08 72.488.99 88.09 86.38 85.07 82.87 82.78 82.57 81.97 81.62 80.3 78.4 77 76.6 76.982.54 83.66 84.53 85.37 83.7 82.14 80.29 82.55 82.86 82.03 79.46 77.66 80.33 81.6599.97 98.04 97.05 93.25 90 87.46 84.4 84.5 83.11 80.52 76.8 79.72 82.8 80.692.68 91.73 91.93 89.87 88.62 87.59 85.67 85.37 83.66 79.52 77.12 79.2 81.39 82.07
101.55 101.23 99.72 96.33 90.11 79.5 82.62 90.11 90.17 83.62 83.15 78.7 84.6 86.2292.78 93.19 93.43 92.45 90.26 89.75 87.6 90.95 88.18 84.67 86.18 79.82 81.3 84.386.42 85.33 85.83 85.66 78.71 75.7 78.48 77.55 76.8 78 79.1 79.2 78.3 77.481.14 78.63 82.28 82.83 82.31 78.68 81.63 83.15 81.23 82.59 76.8 75.87 81.91 81.6796.59 95.58 95.1 91.34 81.77 82.2 84.45 83.98 82.5 83.76 79.1 82.5 77 76.5588.05 86.73 89.77 87.74 75.4 80.75 78.07 81.24 83.96 79.01 82.77 78.32 80.94 81.72
4000Hz
800Hz
1200Hz
1800Hz
2700Hz
Freq.Measurement point(m)
500Hz
630Hz
(Black: Microphone Array, Red: Single Microphone)
* The measurement point is indicated in Figure 5.8 and the unit is decibel.

116
Appendix C
Amplitude Equalization Filter
It is found that the amplitude response from total array is not flat within the
controlled bandwidth, 500 Hz to 4 kHz, due to the placement of array elements as shown
in Figure 4.9. Since the flat amplitude response is one of main criteria, this problem must
be resolved. The strategy is to add another digital filter to the output stage to make the
amplitude response flat within the tolerance ±0.5dB. Figure C.2 is the compensation filter
to the total response in Figure C.1. The total response, including the low-pass and high-
pass filter for uncontrolled frequency ranges, is obtained with this filter in Figure C.3.
500 1000 1500 2000 2500 3000 3500 4000-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Frequency(Hz)
Freq
uenc
y R
espo
nse
at fo
cal p
oint
(dB
)
Figure C.1: Total array response.

117
500 1000 1500 2000 2500 3000 3500 4000-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Frequency(Hz)
Gai
n(dB
)
IdealReal(N=60)
Figure C.2: Amplitude equalization filter response.
0 1000 2000 3000 4000 5000 6000 7000 8000-30
-25
-20
-15
-10
-5
0
Frequency(Hz)
Gai
n(dB
)
Figure C.3: Total array response with the amplitude equalization amplitude filter

118
References
[1] D. Guicking, M. Bronzel and W. Bohm, “Active adaptive noise controls in cars,” in Proc. Recent Advances in Active Control of Sound Vib., 1991, pp.657-670
[2] H. Pudder and F. Steffens, “Improved Noise Reduction for Hands-Free Car Phones Utilizing Information on Vehicle and Engine Speeds,” Proceedings of EUPISCO 2000, Tenth European Signal Processing Conference, Tampere, Finland, 5-8 Sep. 2000, Vol. 3, pp.1851-1854
[3] K. Jacob, “Understanding Speech Intelligibility and the Fire Alarm Code,” National Fire Protection Association Congress, Anaheim, May14, 2001.
[4] J. G. Ryan and R. A. Goubran, “Application of near-field optimum microphone arrays to hands-free mobile telephony,” IEEE Trans. Veh. Technol., 2003. Vol. 52: p. 390-400.
[5] W. Tager, “Near field superdirectivity(NFSD). in Acoustics, Speech, and Signal Processing,” 1998. ICASSP '98. Proceedings of the 1998 IEEE International Conference on. May 1998. Seattle,WA.
[6] S .Linkwitz, "System Test-Microphones," 2005, http://sound.westhost.com/project93.htm
[7] J. G. Ryan and R. A. Goubran, “Near-field beamforming for microphone arrays,” in Acoustics, Speech, and Signal Processing, 1997. ICASSP-97., 1997 IEEE International Conference on. 1997. Munich.
[8] S. E. Nordholm, , et al., “Chebyshev Optimixation for the Design of Broadband
Beamformers in the Near Field,” Circuits and Systems II: Analog and Digital Signal Processing, IEEE Transactions on, 1998. 45(1): p. 141-143.
[9] J. G. Ryan and R. A. Goubran, “Array Optimization Applied in the Near Field of
a Microphone Array,” IEEE Trans. Speech Audio Processing, Mar. 2000. 8: p. 173-176.
[10] Y. R. Zheng, R.A. Goubran, and M. El-Tanany. “A nested sensor array focusing on near field targets,” in Sensors, 2003. Proceedings of IEEE. Oct. 2003.
[11] R. A. Kennedy, D. B. Ward, and P. D. Abhayapala, “Nearfield Beamforming using Nearfield/Farfield Reciprocity,” in Proc. IEEE Int. Conf. Acous., Speech, and Signal Proc., 1997, pp. 2729-2732.

119
[12] D. B. Ward, G. W. Elko, “Mixed nearfield/farfield beamforming: a new technique for speech acquisition in a reverberant environment,” Applications of Signal Processing to Audio and Acoustics, 1997. 1997 IEEE ASSP Workshop on , p.4 , 19-22 Oct. 1997.
[13] R. A. Kennedy, D. B. Ward and T. D. Abhayapala,Ryan, “Nearfield Nearfomring Using Radial Reciprocity,” IEEE Trans. Signal Processing, Jan. 1999. Vol. 47, No. 1, pp. 33-40.
[14] E. Andresdottir and R. W. Schafer, “Application of adaptive noise canceling in a noisy reverberant environment,” in Proc. 1982 ICASSP, Boston, MA, Apr. 1983, pp. 57-60
[15] P. Darlington, P. D. Wheeler, and G. A. Powell, “Adaptive noise reduction in aircraft communication systems,” in Proc. 1985 ICASSP, Tampa, FL, Mar. 1985, pp. 716-719
[16] J. J. Rodriquez, “Adaptive noise reduction in aircraft communication systems,” MIT Lincoln Lab. Lexington, MAm Tech. Rep. 756, Jan. 1987
[17] N. D. Degan and C. Prati, “Acoustic noise analysis and speech enhancement techniques for mobile radio applicaition,” Signal Processing, vol. 15, no. 1, pp. 43-56, July 1988.
[18] W. Armbruster, R. Czarnach, and P. Vary, “Adaptive noise cancellation with reference input-Possible applications and theretical limits,” in Proc. European Signal Process. Conf. EUSIPCO-86, The Hague, 1986, pp. 391-394
[19] M. M. Goulding and J. S. Bird, “Speech enhancement for mobile telephony,” IEEE Trans. Veh. Technol.,vol. 39, pp. 316-326, Nov. 1990.
[20] Y. Grenier, "A microphone array for car environments," Speech Communication, vol. 12, pp. 25--39, Mar. 1993.
[21] S. Nordholm, I. Claesson and B. Bengtsson, “Adaptive array noise suppression of handsfree speaker input in cars,” IEEE Trans. Veh. Technol., 1993, vol. 42, no. 4, pp. 514-518.
[22] V. Galanenko, A. Kalyuzhny and A. Kovtonyuk, “Investigation of effectiveness of microphone arrays for in car use based on sound field simulation,” Acoustics, Speech, and Signal Processing, 2001. Proceedings. (ICASSP '01). 2001 IEEE International Conference on, vol. 5, pp. 3017-3020, May 2001.

120
[23] J. Cho and A. Krishnamurthy, “Speech enhancement using microphone array in moving vehicle environment,” Intelligent Vehicles Symposium, 2003, Proceedings. IEEE, 9-11 June 2003, pp.366 - 371
[24] J. G. Ryan and R. A. Goubran, “Application of near-field optimum microphone arrays to hands-free mobile telephony,” IEEE Trans. Veh. Technol.,vol. 52, pp. 390-400, Mar. 2003.
[25] M. Brandstein, D. Ward, Microphone Arrays Signal Processing Techniques and Applications, Springer-Verlag Berlin Heidelberg New York, 2001.
[26] M. Kajala and M. Hamalainen, “Filter-and-sum beamformer with adjustable filter characteristics,” Acoustics, Speech, and Signal Processing, 2001. Proceedings. (ICASSP '01). 2001 IEEE International Conference on, Salt Lake city, UT, vol. 5, no. 6, May 2001, pp. 2917-2920.
[27] I.A. McCowan, J. Pelecanos and S. Sridharan, “Robust Speaker Recognition using Microphone Arrays,” in Proceedings of 2001: A speaker odyssey, June 2001.
[28] C. A. Olen and R. T. Comptin, Jr., “A numerical pattern synthesis algorithm for arrays,” IEEE Trans. Antenna and Propagation, vol. 38, no. 10, Oct. 1990, pp. 1666-1676.
[29] Z. Zhijun and F. Zhenghe, “A numerical pattern synthesis algorithm for arrays,” Antennas and Propagation Society International Symposium, 1997. IEEE., 1997 Digest, vol.4, July 1997, pp.2264 – 2267.
[30] K. Yan and Y. Lu, “ Sidelobe reduction in array-pattern synthesis using genetic algorithm,” Antennas and Propagation, IEEE Transactions on, vol. 45, July 1997, pp.1117 - 1122 .
[31] A. A. Goldin, “Numerical Optimization of Non-Adaptive Microphone Arrays,” Acoustics, Speech, and Signal Processing, 1997. ICASSP-97., 1997 IEEE International Conference on, vol. 1, April 1997, pp.507 – 510.
[32] R. Smith, “Constant beamwidth receiving arrays broad band sonar system,” Acustica, 23:21-26, 1970.
[33] E. L. Hixson and K.T. Au, “Wide Bandwidth Constant-Beamwidth Acoustic Array,” 79th Meeting ASA, p.53, April 1970.
[34] N. A Adorno and E. L. Hixson, “Near-field array with Constant Focal Area,” J. Acoust. Soc. AM. 91(4), (part 2), p.2325, April 1992.
[35] E. L. Hixson, J. M. Williams and M. D. Cerna, “Constant Directivity Receiving Arrays,” J. Acoust. Soc. AM. 91(4), (part 2), p.2325, April 1992.

121
[36] E. L. Hixson and B. Ugrinovich, “A Wide Bandwidth Constant Beamwidth End-Fire Array,” J. Acoust. Soc. AM. 74, Suppl. 1, p.S99, Nov. 1992.
[37] R. J. Webster and T. N. Lang, “Prescribed Sidelobes for the Constant Beamwidth Array,” Acoustics, Speech, and Signal Processing, IEEE Transactions on, vol. 38, no. 4, April 1990, pp. 727 – 730.
[38] R. A. Kennedy, T. Abhayapala, D. B. Ward, and R. C. Williamson, "Nearfield broadband frequency invariant beamforming," 1996.
[39] R. A. Kennedy, T. D. Abhayapala, and D. B. Ward, "Broadband nearfield beamforming using a radial beampattern transformation," Signal Processing, IEEE Transactions on [see also Acoustics, Speech, and Signal Processing, IEEE Transactions on], vol. 46, pp. 2147, 1998.
[40] T. D. Abhayapala and R. A. Kennedy, "Nearfield broadband array design using a radially invariant modal expansion," J. Acoust. Soc. Amer., vol. 107, pp. 392-403, 2000.
[41] N. Suditu, J. V. D. Laar, and P. C. W. Sommen, "Evaluation of Dereverberation Capabilities of a Nearfield Broadband Beamformer," in Proceedings ProRISC 2001, 2001.
[42] S. V. Gerven, D. Van Compernolle, P. Wauters, W. Verstraeten, K. Eneman, K. Delaet, Multiple beam broadband beamforming: filter design and real-time implementation, in: Proceedings of the IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 1995, pp. 173-176.
[43] I. A. McCowan, D. Moore and S. Sridharan, “Speech Enhancement using near-field superdirectivity with an adaptive sidelove canceller and post-filter,” in Pro. 2000 Australian International Conference on Speech Science and Technology, Dec. 2000, pp. 268-273
[44] I. Cohen and B. Berdugo, "Microphone array post-filtering for non-stationary noise suppression," in Proc. 27th IEEE Internat. Conf. Acoust. Speech Signal Process., ICASSP-2002.
[45] I. A. McCowan and H. Bourlard, "Microphone array post-filter for diffuse noise field," 2002.
[46] I. A. McCowan, C. Marro, and L. Mauary, "Robust speech recognition using near-field superdirective beamforming with post-filtering," 2000.

122
[47] "Modeling of Automobile Interior Noise," in AutoSEA Application Note #21, 1996.
[48] A. Farina and E. Ugolotti, "Numerical model of the sound field inside cars for the creation of virtual audible reconstruction," in DAFX-98 Conference. Barcelona, Spain, 1998.
[49] D. R. Raichel, The Science and Applications of Acoustics, 1 ed. New York: Springer-Verlag, 2000.
[50] L. Beranek, Concert Halls and Opera Houses: Music, Acoustics, and Architecture, 2nd ed. New York: Spinger-Verlag, 2003.
[51] N. Nishihara, T. Hidaka, and L. L. Beranek, "Mechanism of sound absorption by seated audience in halls," J. Acoust. Soc. Am., vol. 110, pp. 2398-2411, Nov. 2001.
[52] B. F. G. Katz, "Acoustic absorption measurement of human hair and skin within the audible frequency range," J. Acoust. Soc. Am., vol. 108, pp. 2238-2242, Nov. 2000.
[53] D. Guicking, M. Bronzel and W. Bohm, “Active adaptive noise controls in cars,” in Proc. Recent Advances in Active Control of Sound Vib., 1991, pp.657-670
[54] H. Hoshino, "Noise-Robust Speech Recognition in a Car Environment Based on the Acoustic Features of Car Interior Noise," vol. 39: R&D Review of Toyota CRDL, pp. 4-9.v
[55] C. Newsletter, "What is Voice?" 1996.
[56] D. T. Blackstock, Fundamentals of physical acoustics. New York: John Wiley & Son, 2000.
[57] CATT, "CATT-Acoustics v8 (Room Acoustics Prediction and Desktop Auralization)," CATT, 2002.
[58] C.A. Balanis, Antenna Theory Analysis and Design, 2nd Ed. John Wiley & Sons, Inc., New York, 1997.
[59] H. K. Dunn and D. W. Farnsworth, “Exploration of pressure field around the human head during speech,” J. Acoust. Soc. Amer, vol. 10, pp. 184-199, 1939.
[60] J. Nash, “Non-cooperative Games,” in The Annals of Mathematics, 2nd ser. Vol. 54, no. 2, pp. 286-295, Sep. 1951

123
[61] M. Sefrioui and J. Periaux, “Nash Genetic Algorithms:Examples and Applications,” in Proc. 2000 Congress on Evolutionary Computation CEC00, 2000, La Jolla, p. 509-516.
[62] Y. Rahmat-Samii, and E. Michielssen, Electromagnetic Optimization by Genetic Algorithms. New York: John Wiley & Son, 1999, ch. 13.
[63] R. J Holden and E. L Hixson, “An Octave Bandwidth Constant Beamwidth Underwater Receiving Array,” Thechincal Memorandom No. 34, Acoustic Research Center, Electronics Research Center, The University of Texas at Austin, May. 1972.
[64] “Signal Processing Toolbox (Version 5) for Use with MATLAB,” The MATHWORKS, Inc., Sep. 2000.
[65] M.M.Goodwin, G.W. Elko, “Constant beamwidth beamforming,” Acoustics, Speech, and Signal Processing, 1993. ICASSP-93., 1993 IEEE International Conference on, Vol. 1, pp.169 – 172, 27-30 April 1993.

124
Vita
Soonkwon Paik was born in Seoul, Korea on May 5, 1971, the son of JongKwan
Paik, and Kyungja Lim. After completing his work at Kwangsung High School, Seoul,
Korea in 1990, he entered Hanyang University in Seoul, Korea. He received the degree of
Bachelor of Science from Hanyang University in February 1994. From March 1994 to
June 1996, he served as a fire direction officer in the field artillery and attained the final
rank of first lieutenant. He worked for Hyundai Motor Company where he designed audio
systems for vehicles. In August 2002, he obtained M.S. degree in Electrical and
Computer Engineering from the University of Texas at Austin, where he continues in his
studies of electromagnetics and acoustics. His research focuses on near-field microphone
arrays in hands-free systems and sound field analyses with numerically computational
tools.
Permanent Address: 2501 Lake Austin Blvd. APT F103,Austin, TX, 78703
This dissertation was typed by by the author.




















![NJP_Reader_1_Nam June Paik ArtCenter [en]](https://img.pdfslide.us/doc/110x75/577d22961a28ab4e1e97cfb4/njpreader1nam-june-paik-artcenter-en.jpg)