Embed Size (px)
Citation preview

Copyright
by
Nemesio Miguel-Hernandez
2002
The Dissertation Committee for Nemesio Miguel-Hernandez Certifies that
this is the approved version of the following dissertation:
Scaling Parameters for Characterizing Gravity Drainage in
Naturally Fractured Reservoir
Committee:
Mark A. Miller, Co-Supervisor
Kamy Sepehrnoori, Co-Supervisor
William R. Rossen
Mojdeh Delshad
Todd J. Arbogast

Scaling Parameters for Characterizing Gravity Drainage in
Naturally Fractured Reservoir
by
Nemesio Miguel-Hernandez, B.S., M.S.
Dissertation
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
Doctor of Philosophy
The University of Texas at Austin
August 2002

Dedication
I dedicate this work to my three sons; Daniel, Ivan, and Angel; to my wife, Anita;
to my mother and father, Micaela and Pablo; and to all my sisters and brothers.
v
Acknowledgements
I want to express my most sincere acknowledgments to all the people who
in one way or another have made it possible to accomplish this work.
First, I would like to thank my supervising professors, Drs. Mark A. Miller
and Kamy Sepehrnoori, for their help and guidance during the development of
this work. I want to thank also the other members of the supervising committee,
Drs. William R. Rossen, Mojdeh Delshad, and Todd J. Arbogast for their time and
comments.
I would like to take this opportunity to express my gratitude to all the
people at PEP-PEMEX for their support, confidence, and friendship. Thanks for
giving me the opportunity and financial support to reach this goal in my
professional life.
Finally, I want to deeply thank my wife, Anita, for her understanding,
patience, and endless help; my sons, Daniel, Ivan, and Angel, for being the source
of love and life for me; my mom and dad Mamica and Papavo for giving me life,
and my sisters and brothers for their love.

vi
Scaling Parameters for Characterizing Gravity Drainage in
Naturally Fractured Reservoir
Publication No._____________
Nemesio Miguel-Hernandez, Ph. D.
The University of Texas at Austin, 2002
Supervisors: Mark A. Miller and Kamy Sepehrnoori
Numerical simulation of naturally fractured reservoirs undergoing
immiscible gas injection requires specific information about fracture and matrix
properties including laboratory determination of capillary pressure and relative
permeability for each fluid phase. It also requires PVT analysis of fluid phases.
Additionally, phase segregation due to gravity, capillarity, and gas diffusion must
be considered.
Numerical models for naturally fractured reservoirs are generally divided
into two types. The first is the double porosity single permeability (dual porosity)
model. The second is the double porosity double permeability (dual permeability)
model. The difference between the two models is basically that the second type
considers matrix block-to-block flow while the first does not. The present study is
focused on the dual porosity model.

vii
Numerical models require a transfer function calculation between matrix
and fracture. Therefore proper determination of mass transfer from matrix to
fracture plays an important role in generating good simulation results. In a gas
injection project, the difference in density between gas and liquid phases makes it
important to consider gravity segregation and capillary forces that holds liquid in
the matrix rock.
The goal of this project is to determine methods of scaling dimensionless
variables to simplify the analysis and thus identify the main parameters
controlling the gravity drainage process in naturally fractured reservoirs matrix
blocks. This work has application in optimization, history matching, and
stochastic simulation through its promise to reduce the amount of computer time
required. The primary tasks are a) analysis of gravity segregation with gas
injection in a single matrix block, b) determination of dimensionless scaling
groups, c) analysis and test of common dual porosity transfer functions, and d)
application using a commercial dual porosity model.

viii
Table of Contents
List of Tables .........................................................................................................xi
List of Figures ......................................................................................................xii
Chapter 1 Introduction ........................................................................................... 1
Chapter 2 Literature Review .................................................................................. 3
2.1 Simulation of Naturally Fractured Reservoirs ......................................... 3
2.2 Transfer Functions.................................................................................... 7
Chapter 3 Problem Statement............................................................................... 18
Chapter 4 Matrix-Fracture Gravity Drainage....................................................... 19 4.1 Model ..................................................................................................... 19
4.1.1 Dimensionless Form................................................................... 25 4.1.2 Oil Flux Equation ....................................................................... 28
4.1.2.1 Dimensionless Form of Oil Flux Equation .................... 29 4.2 Model Verification ................................................................................. 30
4.2.1 Capillary Minimum Oil Saturation ............................................ 32 4.3 Gravity Drainage With Negligible Capillary Pressure........................... 33
4.3.1 Oil Relative Permeability in Tabular Form................................ 44
Chapter 5 Dual Porosity Gravity Segregation Models......................................... 63 5.1 Gravity Drainage Flux Calculations....................................................... 63 5.2 Eclipse Model......................................................................................... 64 5.3 Quandalle and Sabathier Model ............................................................. 70 5.4 Sonier et al. Model ................................................................................. 79 5.5 Beck et al. Model ................................................................................... 82
5.5.1 Oil Flux ...................................................................................... 83 5.5.2 Gas Flux ..................................................................................... 86

ix
5.5.3 Combination of Oil and Gas Flux Equations ............................. 89 5.6 Results and Discussion........................................................................... 92
5.6.1 Procedure.................................................................................... 95 5.6.1.1 With no Gridded Matrix Block ...................................... 95 5.6.1.2 With Gridded Matrix Block Solution............................. 96
Chapter 6 Flow in Lateral and Vertical Directions ............................................ 111 6.1 Lateral-Vertical Flow ........................................................................... 111
6.1.1 Oil Injection at Top of the Matrix and Constant Gas Pressure in Lateral Fractures................................................................... 114
6.1.2 Flow in Partially Open Bottom Fracture .................................. 115 6.2 Flow from a stack of Matrix Blocks..................................................... 116
Chapter 7 Fine Grid and Dual Porosity Simulation ........................................... 134 7.1 Stack of Five Matrix Blocks................................................................. 134 7.2 Simulation with Pseudo Functions ....................................................... 137
7.2.1 Matrix Block with the Same Size as a Stack of Five Matrix Blocks....................................................................................... 139
7.2.2 Laboratory Measurements of Gravity Drainage....................... 140
Chapter 8 Conclusions and Recommendations .................................................. 153 8.1 Conclusions .......................................................................................... 153 8.2 Recommendations ................................................................................ 154
Appendix A Solution to 1D Vertical Gravity Drainage ..................................... 156
Appendix B Dimensionless Form of Transfer Function .................................... 163
Appendix C Height of Oil and Gas with Vertical Equilibrium.......................... 165
Appendix D Dimensionless Form of Dual Porosity Models.............................. 171 D.1 Eclipse Model...................................................................................... 171 D.2 Quandalle and Sabathier Model .......................................................... 173 D.3 Bech et al. Model ................................................................................ 175

x
Appendix E Oil Saturation due to Capillarity .................................................... 177 E.1 Average Saturation in the Matrix Block at Static Conditions ............. 177
Appendix F Gas mobility Effects....................................................................... 180 F.1 Neglecting Gas Viscous Forces ........................................................... 180 F.2 Neglecting Gas Mobility...................................................................... 181
Appendix G Code in C++ and Eclipse File for Solving 1D Vertical Gravity Drainage ..................................................................................................... 186 G.1 C++ Code for Vertical Gravity Drainage in 1D................................. 186 G.2 Eclipse Data File for 1D Gravity Drainage ....................................... 192
Nomenclature ..................................................................................................... 197
References ........................................................................................................... 200
Vita .................................................................................................................... 204

xi
List of Tables
Table 4.1: Basic data used for gravity segregation model. ............................... 47
Table 4.2: Saturation functions used in calculations (dimensionless and non-dimensionless). ......................................................................... 47
Table 4.3: Geometry, porosity, and permeability utilized in Eclipse for a matrix block model with top and bottom fractures. ......................... 48
Table 4.4: Minimum saturation with its capillary pressure (dimensionless and non-dimensionless) for a matrix block of 3 m thickness........... 48
Table 4.5: Calculations with tabulated data of oil relative permeability to obtain dimensionless pseudo oil relative permeability for the case with no capillary pressure. .............................................................. 49
Table 5.1: Geometry, porosity, and permeability utilized in Eclipse four-cell model to determine oil transfer from matrix to fracture with gravity drainage................................................................................ 99
Table 6.1: Matrix and fracture characteristics for evaluation of lateral-vertical flow. .................................................................................. 119
Table 7.1: Data from Firoozabadi (1993) experiment at surface conditions (using air from the atmosphere instead of gas) for gravity drainage in a stack of three matrix blocks separated by fractures.. 142

xii
List of Figures
Figure 4.1: 1D model for gravity drainage flow in vertical direction ( z ) and boundary conditions. ........................................................................ 50
Figure 4.2: Relative permeability of oil utilized for simulation of gravity drainage in a matrix-block................................................................ 51
Figure 4.3: Gas-oil capillary pressure utilized for simulation of gravity drainage in a matrix block with top and bottom fractures................ 51
Figure 4.4: Dimensionless oil relative permeability utilized for simulation of gravity drainage in a matrix block with top and bottom fractures. .. 52
Figure 4.5: Dimensionless gas-oil capillary pressure for simulation of gravity drainage in a matrix block with top and bottom fractures................ 52
Figure 4.6: Oil formation volume factor utilized in simulation of gravity drainage in a matrix block with top and bottom fractures................ 53
Figure 4.7: Gas formation volume factor utilized in simulation of gravity drainage in a matrix block with top and bottom fractures................ 53
Figure 4.8: Solubility of gas in oil utilized for simulation of gravity drainage in a matrix block with top and bottom fractures. ............................. 54
Figure 4.9: 1D simulation with Eclipse to simulate gravity drainage in a matrix block with top and bottom fractures. .................................... 54
Figure 4.10: Oil saturation profiles in the matrix block with gravity drainage, simulating with the vertical drainage equation and Eclipse. ............ 55
Figure 4.11: Oil flux from the vertical drainage equation and Eclipse simulating a matrix block with gravity drainage.............................. 55
Figure 4.12: Cumulative oil production from a matrix block with top and bottom fractures simulating gravity drainage with vertical drainage equation and Eclipse.......................................................... 56

xiii
Figure 4.13: Oil flux for the times having numerical errors. Refinement is only in the bottom cell with 10 and 20 sub-cells for gravity drainage case. ................................................................................... 56
Figure 4.14: Dimensionless oil saturation profiles at different dimensionless times and the relation with dimensionless oil relative permeability for the analytical solution of gravity drainage with no capillary pressure in a matrix block. ........................................... 57
Figure 4.15: Dimensionless oil relative permeability at the outlet of the matrix and diagram dimensionless matrix height vs. dimensionless time for gas oil gravity drainage with no capillary pressure. ................... 58
Figure 4.16: Saturation profiles at different times for gravity drainage in a matrix block with no capillarity for vertical drainage equation and analytical solution...................................................................... 59
Figure 4.17: Dimensionless transfer function for gas oil gravity drainage in a matrix block with no capillarity obtained with the analytical solution and the vertical drainage equation...................................... 59
Figure 4.18: Dimensionless average oil saturation vs. time obtained from gas-oil gravity drainage for a matrix block with vertical drainage equation with no capillarity and the analytical solution also with no capillarity..................................................................................... 60
Figure 4.19: Pseudo oil relative permeability obtained for gravity drainage and no capillary pressure and Corey type oil relative permeability ( 3=oe )............................................................................................. 60
Figure 4.20: Pseudo oil relative permeability obtained for gravity drainage and no capillary pressure and Corey type oil relative permeability ( 3=oe )............................................................................................. 61
Figure 4.21: Dimensionless transfer function for different dimensionless oil relative permeabilities (different oe ) obtained with analytical solution and vertical drainage equation............................................ 61

xiv
Figure 4.22: Dimensionless transfer function for gravity drainage in a matrix block with and without capillarity ( pce ) simulated with the vertical drainage equation neglecting gas viscous pressure drop..... 62
Figure 5.1: Eclipse dual porosity model indicating fractional volume of gas and fractional volume of oil at two different times. ....................... 100
Figure 5.2: Model utilized in Eclipse to test dual porosity models. ................. 100
Figure 5.3: Average oil saturation vs. time for the dual porosity model and integral equation solution from Eclipse model. ............................. 101
Figure 5.4: Transfer function for Eclipse dual porosity model and integral equation solution. ........................................................................... 101
Figure 5.5: Schematic of Quandalle and Sabathier (1989) matrix-fracture model. ............................................................................................. 102
Figure 5.6: Oil saturation vs. time for Quandalle and Sabathier (1989) dual porosity model and its integral equation solution. ......................... 103
Figure 5.7: Transfer function for Quandalle and Sabathier (1989) dual porosity model and its integral equation solution. ......................... 103
Figure 5.8: Bech et al. model (1991) for gas-oil systems with gravity segregation. .................................................................................... 104
Figure 5.9: Results of Bech et al. model with and without the gas mobility term in the integral solution. In the gas relative permeability the exponent in the Corey type equation is 2=ge . ............................. 104
Figure 5.10: Transfer function from matrix to fracture with gridded matrix block (vertical drainage equation), Eclipse, Quandalle and Sabathier, and Bech et al. dual porosity models. ........................... 105
Figure 5.11: Variation of dimensionless capillary pressure and relative permeability of oil with respect to oil saturation............................ 105

xv
Figure 5.12: Pseudo capillary pressure from Bech et al. model, Quandalle and Sabathier model, and Eclipse model obtained with a) transfer function of the gridded matrix block (vertical drainage equation) and b) the analytical pseudo oil relative permeability.................... 106
Figure 5.13: Analytical and smoothed pseudo oil relative permeability. ........... 107
Figure 5.14: Smoothed pseudo capillary pressure from Bech et al. model, Eclipse model, and Quandalle and Sabathier model obtained with a) transfer function of the gridded matrix block (vertical gravity drainage) and b) the analytical pseudo oil relative permeability. .. 107
Figure 5.15: Coefficients for the power Equation 5.100 for different capillary pressure curves. .............................................................................. 108
Figure 5.16: Exponents for the power Equation 5.100 for different capillary pressure curves. .............................................................................. 108
Figure 5.17: Average dimensionless oil saturation vs. time obtained from the gridded matrix block (vertical drainage equation). ........................ 109
Figure 5.18: Dimensionless time for the beginning of declination in transfer function........................................................................................... 109
Figure 5.19: Different dimensionless pseudo capillary pressure with Eclipse dual porosity model obtained with a) analytical pseudo oil relative permeability and b) exponential transfer function declination with Eq. 5.100.............................................................. 110
Figure 5.20: Different dimensionless pseudo capillary pressure with Bech et al. dual porosity model obtained with a) analytical pseudo oil relative permeability and b) exponential transfer function declination with Eq. 5.100.............................................................. 110
Figure 6.1: One quarter of matrix-fracture representing flow in lateral and vertical directions. .......................................................................... 120
Figure 6.2: Transfer function vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) with no capillary pressure. ............................................. 121

xvi
Figure 6.3: Cumulative oil production vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) with no capillary pressure................................ 121
Figure 6.4: Transfer function vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) including capillary pressure. .......................................... 122
Figure 6.5: Cumulative oil production vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) including capillary pressure............................. 122
Figure 6.6: Oil pressure at different times in the matrix 3D flow (Eclipse) including capillarity........................................................................ 123
Figure 6.7: Gas pressure at different times in the matrix 3D flow (Eclipse) including capillarity........................................................................ 123
Figure 6.8: Oil pressure for any location in the matrix block (considering as reference depth the matrix bottom, values indicated with arrows are oil potentials). ........................................................................... 124
Figure 6.9: Oil pressure at different times in days for the gridded matrix (Eclipse) with no capillarity. .......................................................... 124
Figure 6.10: Oil saturation at different times for the gridded matrix block (Eclipse) including capillarity. ....................................................... 125
Figure 6.11: Oil saturation at different times in the matrix with 3D flow (Eclipse) with no capillarity. .......................................................... 125
Figure 6.12: Oil pressure vs. time at the edge and at the center of the matrix block with 3D flow (Eclipse). ........................................................ 126
Figure 6.13: Cumulative oil production from matrix layers to a lateral fracture at different depths (cells) with oil injection at matrix top and keeping gas at constant pressure in lateral fractures (3D flow). .... 126
Figure 6.14: Oil saturation vs. depth for different times for 3D flow injecting oil at top of matrix keeping gas at constant pressure in lateral fractures. ......................................................................................... 127

xvii
Figure 6.15: Bottom view of one quarter of matrix with fracture showing the cells opened to vertical flow to test partial flow at the bottom of matrix block.................................................................................... 127
Figure 6.16: Oil production rate from matrix to bottom fracture with different rows of cells allowed to flow to bottom fracture (quarter of matrix block). ................................................................................. 128
Figure 6.17: Transfer function from matrix to fractures (lateral and bottom) with partial flow at the bottom of the matrix block (using different rows of cells). .................................................................. 128
Figure 6.18: One quarter of a stack of three matrix blocks divided by fractures with gas at constant pressure at top. ............................................... 129
Figure 6.19: Oil production rate vs. time for each quarter of matrix block to its adjacent bottom fracture for a stack of three matrix blocks separated by fractures including lateral fractures........................... 130
Figure 6.20: Cumulative oil production vs. time for each quarter matrix block to its adjacent lower fracture and from that fracture to the lower matrix for a stack of a quarter of three matrix blocks separated by fractures including lateral fractures................................................ 130
Figure 6.21: Oil production rate vs. time from each quarter of matrix block to one lateral fracture (one quarter of a stack of three matrix blocks separated by fractures including lateral fractures). ........................ 131
Figure 6.22: Cumulative oil production vs. time for flow from horizontal fractures to one lateral fracture. Upper horizontal fracture is between top matrix and middle matrix. Middle horizontal fracture is between middle matrix and bottom fracture. ................ 131
Figure 6.23: Cumulative oil production vs. time for flow from matrix blocks to one lateral fracture (a quarter of a stack of three matrix blocks divided by fractures with lateral fractures). ................................... 132
Figure 6.24: Oil pressure in the matrix (cell adjacent to fracture) for a stack of a quarter of three matrix blocks divided by fractures (including lateral fractures).............................................................................. 132

xviii
Figure 6.25: Capillary pressure profiles at different times for a quarter of a stack of three matrix blocks with gravity drainage. ....................... 133
Figure 6.26: Oil saturation in the matrix (cell adjacent to the fracture) for a quarter of a stack of three matrix blocks separated by fractures (including lateral fractures). ........................................................... 133
Figure 7.1 Stack of five matrix blocks separated by fractures. There are also fractures at top and bottom of the stack. ........................................ 143
Figure 7.2: Cumulative oil from a matrix block flowing to bottom fracture for different number of wells placed at bottom fracture (matrix grid 11x11x22). .............................................................................. 144
Figure 7.3: Total cumulative oil production from matrix blocks to their adjacent lower fracture in a stack of 5 matrix blocks separated by fractures. ......................................................................................... 144
Figure 7.4: Dual porosity model of 5 matrix blocks with its fractures utilized to compare the fine grid system. .................................................... 145
Figure 7.5: Oil production rate for a stack of 5 matrix blocks simulated with fine grid and the dual porosity model 1 of Eclipse. ....................... 146
Figure 7.6: Oil rate vs. time for Eclipse dual porosity model 1 showing for the top matrix block to fracture and total flow rate (5 matrix blocks) to fracture........................................................................... 146
Figure 7.7: Oil production rate for each matrix block to its adjacent lower fracture for a stack of 5 matrix blocks. Simulated with fine grid model. ............................................................................................. 147
Figure 7.8: Pseudo oil relative permeability used in the dual porosity simulation in Eclipse dual porosity model to simulate a stack of 5 matrix blocks. ................................................................................. 147
Figure 7.9: Pseudo capillary pressure obtained with the procedures of Chapter 5. ....................................................................................... 148

xix
Figure 7.10: Oil rate vs. time for a gridded stack of 5 matrix blocks and the same stack simulated with Eclipse dual porosity model using pseudo oil relative permeability and pseudo capillary pressure..... 148
Figure 7.11: Oil production of a gridded stack of 5 matrix blocks and a matrix block of equal size of the stack of 5 matrix blocks. ....................... 149
Figure 7.12: Oil saturation profiles in a matrix block of size equal to a stack of five matrix blocks flowing with gravity drainage. ......................... 149
Figure 7.13: Oil saturation profiles at different times for the gridded stack of five matrix blocks........................................................................... 150
Figure 7.14: Oil pressure profiles at different times for the gridded stack of five matrix blocks........................................................................... 150
Figure 7.15: Oil pressure profiles at different times for the gridded matrix block with same size that the stack of five matrix blocks. ............. 151
Figure 7.16: Remaining oil saturation vs. size of matrix blocks and static oil saturation given by capillary pressure. ........................................... 151
Figure 7.17: Oil production rate vs. time for a stack of three matrix blocks with gravity drainage from Firoozabadi (1993) experiments and 1D simulation with Eclipse. ........................................................... 152
Figure 7.18: Cummulative oil production vs. time for a stack of three matrix blocks with gravity drainage from Firoozabadi (1993) experiments and 1D simulation with Eclipse. ................................ 152
Figure A.1: Block centered grid used to numerically solve Eq. 4.33 in one dimension in the vertical direction.`............................................... 162
Figure C.1: Representation in vertical equilibrium of saturation of fluids in a matrix block at initial conditions, in a gas-oil system and in a water-oil system, Aziz et al. (1999). .............................................. 169
Figure C.2: Oil height calculations for different average oil saturation in a matrix block considering minoS and orS . ....................................... 170

xx
Figure F.1: Oil flux vs. time modifying the gas relative permeability to a straight line of slope 45 degrees compared with the Corey type equation of Table 4.2...................................................................... 183
Figure F.2: Oil flux vs. time from a matrix block with gravity drainage using a modified gas relative permeability with a straight line of 45 degrees and the vertical gravity equation neglecting gas viscous pressure drops................................................................................. 183
Figure F.3: Saturation profiles at different times for a matrix block with gravity drainage for a) using gas relative permeability with a straight line of 45 degrees and b) vertical gravity equation that neglects gas viscous pressure drops. .............................................. 184
Figure F.4: Ratio gas viscosity/gas relative permeability and oil viscosity/oil relative permeability and addition of both ratios. .......................... 184
Figure F.5: Oil and gas mobility for the Corey type equation with oil and gas exponents equal to 3 and 2, respectively ( oe and ge ). ................... 185
Figure F.6: Transfer function with the dual porosity model with and without gas mobility term. When including gas mobility term there are two cases of gas relative permeability exponent (eg=2, eg=1)....... 185

1
Chapter 1 Introduction
In naturally fractured reservoirs, as in non-fractured reservoirs, when
multiple fluids exist, gravity segregation is present to some degree. Segregation is
driven by the difference in density between fluids. The larger the difference in
density, the more important is gravity segregation.
Due to the presence of high conductivity fractures, numerical simulation
of a naturally fractured reservoir is different from simulation of a non-fractured
reservoir. When the gas with low viscosity and non-wetting characteristics
reaches the fractures, it moves rapidly leaving the wetting fluid (oil) preferentially
in the matrix. This characteristic leads to the use of dual porosity and dual
permeability models to study naturally fractured reservoirs.
This dissertation first presents a literature review, covering important
topics in fractured reservoirs and a review of matrix-fracture transfer functions
used in numerical simulators; a model is then developed to simulate gravity-
capillary phenomena in the vertical direction in Chapter 4. This chapter also
discusses gravity drainage with no capillary pressure and a procedure to generate
pseudo oil relative permeability with gravity drainage. A comparison of different
transfer functions for dual porosity models is done in Chapter 5 to determine the
differences between them. This chapter also addresses a methodology to generate

2
pseudo capillary pressure with gravity drainage. Chapter 6 reviews 3D flow from
matrix to fracture to determine the effects with no lateral flow and no liquid
saturation in the fracture. Finally a procedure is established to represent matrix-
fracture transfer with gravity drainage in Chapter 7, which also presents a
comparative case between a dual porosity model in a commercial simulator with
gravity drainage and a gridded system of a stack of matrix blocks separated by
fractures.

3
Chapter 2 Literature Review
Typically, two different continuum approaches are used to model naturally
fractured reservoirs. One is called the dual porosity formulation and the other the
dual permeability formulation. Both approaches require some sort of matrix-
fracture transfer function, which has been the subject of study by many different
authors. In general, multi-phase transfer functions should include processes
related to capillarity, gravity segregation, diffusion, and relative permeability.
2.1 SIMULATION OF NATURALLY FRACTURED RESERVOIRS
Naturally fractured reservoirs occur worldwide. A considerable percentage
of world oil reserves are found in this type of reservoir. The major characteristic
that distinguishes fractured from non-fractured reservoirs is the presence of
natural fractures with (usually) high permeability and low porosity. Fractures
typically act as flow paths and matrix blocks act either as a source or a sink to the
fractures.
Warren and Root (1962) introduced the dual porosity transfer function for
single-phase flow, based on an assumption of quasi steady transfer flow:
( )fmm ppk
VV
−=µστ (2.1)
where,

4
τ = transfer function, 1/sec
k = matrix permeability, Darcy
µ = viscosity of phase, cp
p = pressure, atm
σ = shape factor, cm-2
mV = volume of matrix block, cm3
V = total bulk volume, cm3
and subscripts
m = matrix
f = fracture
The “shape factor” is based on the size and shape of the matrix block.
Kazemi et .al (1976) extended Warren and Root’s model to multi-phase
flow:
( )fmrm pp
kkVV
ααα
αα µ
στ −= (2.2)
where,
αrk = relative permeability of phase α , fraction
mpα = pressure in the matrix of phase α , atm
fpα = pressure in the fracture of phase α , atm

5
A 3D three-phase model was developed by Thomas et .al (1980). They
used a transfer function that assumes horizontal flow between block centers of
matrix and fracture. They include pseudo oil relative permeability and pseudo
capillary pressure to include the gravity effect, although they do not say how the
pseudos were calculated. Litvak (1985) introduced a detailed gravity and capillary
treatment in the transfer function.
The displacement of oil from matrix to fracture depends on three forces:
viscous, gravity, and capillarity (Litvak, 1986; Quandalle and Sabathier, 1989;
Chen et .al , 1991). In his work, Litvak made the following statements: (1)
capillary pressure effects are not only a function of water or gas saturation, but
also is a function of the change in the water or gas levels in the fracture, (2) in a
gas invaded zone, gravity will assist the displacement of oil by gas in the matrix
but capillary forces will resist the removal of oil from the matrix blocks, (3) gas
will move into the matrix blocks only if gravity forces exceed the capillary entry
pressure; however, gravity forces will be larger in gas-oil systems compared to
water-oil systems due to substantial differences between the densities of the oil
and gas, (4) for large blocks the gravity force can exceed the negative effect of
capillary pressure, (5) tighter matrix rock may have higher water saturation
because of higher capillary pressure (as a result, higher water saturation can be
observed in zones above a low water saturation zone), and (6) capillary imbibition

6
will act in the same direction as the gravity forces for single matrix block
immersed in the water for water-oil systems with water-wet rock.
From the previous observations, Litvak also establishes that capillary
pressure can play a substantially larger role in dual porosity systems compared to
single porosity systems. The single porosity treatment of capillary forces assume
that the reservoir imbibes water in the entire oil zone above the aquifer. However,
in fractured reservoirs water can move rapidly through the high permeability
fractures. Imbibition of water in matrix blocks can occur only in a portion of the
oil zone invaded by water. Thus the results using a single porosity simulator to
model naturally fractured reservoirs can yield totally different results from those
obtained with an appropriate dual porosity simulator.
Gravity effects in the matrix-fracture system are functions of the fluid
distribution in the matrix and fracture due to changes in saturation with time.
Gravity, viscous, and capillary forces are typically calculated considering the
performance of a single matrix-fracture block (Litvak, 1986). Additionally,
simulators normally make the assumption that both matrix and fractures are
distributed evenly across the entire grid cell (Sonier, 1988).
With respect to flow in fractures, viscous displacement in matrix blocks
caused by potential gradients in the fracture network are generally neglected
(Gillman and Kazemi, 1988). However, viscous forces may be important in dual

7
porosity systems when there is low matrix capillary pressure (Gillman and
Kazemi, 1988; Sabathier, 1988). Gilman and Kazemi present a procedure to
implement viscous forces in the matrix, making modifications to the transfer
function.
The dual porosity formulation requires not only a different treatment of
the displacement mechanism in the matrix block, but also requires different
presentation of transmissibilities (Litvak, 1985; Beckner et .al , 1987). The
formulation generally utilizes a different shape factor to match fine-grid results
depending on whether the process is water imbibition in a water-oil system or
gravity drainage in a gas-oil system. This suggests the use of the shape factor as a
matching parameter (Beckner et .al ). Variations in the degree of fracturing
through the reservoir is specified by using different sizes of matrix blocks and
different fracture porosities in different parts of the reservoir (Litvak, 1985).
2.2 TRANSFER FUNCTIONS
The simplest approach to simulating naturally fractured reservoirs is by
representing fractures and matrix as separate grid blocks in the model. This could
be very difficult to simulate an entire oil field, because of the large amount of
computer resources necessary to accomplish a field study. The simplest approach
to simulate transfer of fluids from matrix to fracture is by representing the fracture
network as a continuous media and the matrix blocks as source/sink terms. This
concept leads to a so-called transfer function in the general continuity equation,

8
which is currently the most accepted model to simulate naturally fractured
reservoirs.
Since Warren and Root presented their model that included the first
transfer function, it has been evolved with time. Litvak (1985) presented a
formulation for simulating natural fractured reservoirs for a matrix block
immersed in water:
( ) mffmmm
rm CGppkB
kVV
ααα
αα σ
µτ +−
= (2.3)
where
αB = formation volume factor of phase α , cm3/scm3
Litvak does not mention the definition of the term mfCGα , but he includes
in this term the capillary ( CP ) and gravity ( GP ) forces. Litvak defines the gravity
term ( GP ) for the water-oil case,
( )( )wfwmowG zzP −−= ρρ (2.4)
where wρ and oρ are the water and oil densities, respectively, and wmz
and wfz are the heights of water in matrix and fracture, respectively.

9
He does not mention it, but there is a similar equation for the gas-oil case.
In a block immersed in water he considers the addition of capillary and gravity
pressure ( cg PP + ). For a matrix block immersed in the gas zone he considers the
subtraction of gravity and capillarity pressures ( cg PP +− ).
In his transfer function, Litvak shows a gravity term that involves a
product of the difference in density of the phases and the difference in saturation
heights between matrix and fracture (Eq. 2.4). Litvak does not show how to
calculate the saturation height in matrix and fracture. He gives a procedure to
implement capillary and gravity forces ( mfCGα ) in Eq. 2.3 by single matrix block
simulations, considering the number of matrix blocks contained in a grid cell, and
also considering the level of water (or gas) in the grid block.
In his simulations, Litvak establishes that for fractured reservoirs, water
can move rapidly through the high permeability fractures and that non-fractured
reservoirs assume that water imbibes over the entire height. The dual porosity
treatment of capillary and gravity forces assumes that imbibition of water (oil
drainage in the gas case) in the matrix can occur only in a portion of the oil zone
invaded by water (displaced by gas). Litvak also establishes that water saturation
in the matrix blocks is not related to the water-oil contact due to the fact that
matrix blocks are separated by fractures (matrix discontinuity). It is defined only
by the properties of the matrix rock. Tighter matrix may have higher water

10
saturation because of higher capillary pressure. As a result, higher initial water
saturation can be observed in zones above a low water saturation zone.
Sonier et al. (1986) proposes the following transfer function for oil, gas,
and water, respectively.
( )
−−++−
= gmwmgfwf
coofom
moo
romo zzzz
ggpp
Bkk
VV ρσ
µτ (2.5)
( ) ( )
−−−−−
= gmgf
cgcgomcgofofom
mgg
rgmg zz
ggPPpp
Bkk
VV ρσ
µτ (2.6)
( ) ( )
−−−+−
= wmwf
cwcowmcowfofom
mww
rwmw zz
ggPPpp
Bkk
VV ρσ
µτ (2.7)
where,
cgofP = gas-oil capillary pressure in the fracture, atm
cgomP = gas-oil capillary pressure in the matrix, atm
cowfP = oil-water capillary pressure in the fracture, atm
cowmP = oil-water capillary pressure in the matrix, atm
oρ = oil density, gm/cc
wρ = water density, gm/cc
gρ = gas density, gm/cc
oµ = oil viscosity, cp
gµ = gas viscosity, cp

11
wµ = water viscosity, cp
oB = oil formation volume factor, cm3/scm3
gB = gas formation volume factor, cm3/scm3
wB = water formation volume factor, cm3/scm3
g = gravitational acceleration, cm/sec2
cg = gravitational units conversion constant, 1.0133x106
(dyne/cm2)/atm
and
hSS
SSz
wfiorwf
wfiwfwf
−−−
=1
(2.8)
hSS
SSz
gfiorgf
gfigfgf
−−−
=1
(2.9)
hSS
SSz
wmiorwm
wmiwmwm
−−
−=
1 (2.10)
hSS
SSz
gmiorgm
gmigmgm
−−−
=1
(2.11)
where,
wfS = water saturation in fracture, fraction
gfS = gas saturation in fracture, fraction

12
wmS = water saturation in matrix, fraction
gmS = gas saturation in matrix, fraction
wfiS = initial water saturation in fracture, fraction
gfiS = initial gas saturation in fracture, fraction
wmiS = initial water saturation in matrix, fraction
gmiS = initial gas saturation in matrix, fraction
Subscript i means initial. The z ’s are the heights of each phase (oil, water,
or gas). In this way, gravity forces influence the matrix and fracture dynamically
by changing fluid saturation. Sonier et .al in their simulation examples
determined that the saturation height in the matrix block is very important for
gravity segregation. The more height, the higher the gravity force and more oil is
recovered from the matrix for both the water-invaded zone and the gas-invaded
zone.
Like Litvak, Sonier et al. did comparisons with single porosity and dual
porosity formulations. In a fractured reservoir, the gas-oil ratio increases rapidly
in a gas-saturated zone due to the high mobility in the fractures. Sonier et .al
also analyzed the effect of the displacement pressure in the capillary pressure
curve. They fixed an entry pressure in the capillary pressure curve and increased
the height of matrix block. As the matrix height increased, the overall importance
of the entry capillary pressure became less important.

13
Quandalle and Sabathier (1987) define a transfer function which separates
viscous, capillary and gravity forces in a matrix block. Their model defines flow
towards all six faces of a 3D parallelepiped shaped block. They then utilize
coefficients for each force acting in each flow direction:
( )fmm
rb CkkVV
ααα
αααα σ
µρτ Φ−Φ
= (2.12)
where,
αC = component concentration in phase α , gm/gm
mαΦ = potential of phase α in the matrix, atm
fαΦ = potential of phase α in the fracture, atm
The second term in parenthesis is defined for different faces of the
parallelepiped. In the +x direction, for example,
( ) ( )omcofccffxvofomfm ppQppQpp αααα −−−−−=Φ−Φ + (2.13)
and in the +z direction,
22** z
ggQz
ggppQpp
cmg
cffzvofomfm
∆
−−
∆+−−−=Φ−Φ + ρρρ ααα
( )omcofcc PPQ αα −− (2.14)

14
Quandalle and Sabathier comment about equivalent equations for −x , +y , −y , and −z directions. The coefficients Q were utilized by Quandalle and
Sabathier to match the fine grid simulations, because the three forces (viscosity,
gravity, and capillarity) are not equally affected during the flow process. The flow
coefficients are defined as input data so that their relative effect may be adjusted.
They also utilize an average density in the fracture that is saturation weighted
( *ρ ). This model is not as accurate as subgridding the matrix blocks, but allows
the block’s behavior to be matched to well-defined conditions and results in good
accuracy at intermediate conditions.
Gilman and Kazemi (1988) propose a method to take into account the
viscous displacement in matrix blocks caused by potential gradients in the
fracture network. This potential gradient is generally neglected in the matrix-
transfer function. Gilman and Kazemi conclude that correct simulation of gravity
forces requires gridding the matrix blocks. Sabathier (1988) agreed with this
result, but considers that adequate gravity calculations are still more important
than viscous flow calculations in the fractures.
Beckner et al. (1988) propose a method to determine water imbibition
with a diffusion equation model with the assumptions of negligible oil phase
gradient ahead and behind a water front, neglecting gravity effects. The model
includes a nonlinear diffusion coefficient. The model is solved numerically with
moving boundary conditions as the imbibition model. Additionally, Beckner et

15
.al found that the usual transfer functions generally describe one directional flow,
which is the reason for not getting a good match compared with gridded systems
that represent multidimensional fluid exchange between matrix and fracture.
Ishimoto (1998) utilizes a different approach for transfer functions from
others. He utilizes an integration method for capillary and gravity effects using
the vertical equilibrium approach. With respect to the matrix-fracture system, he
first divides the matrix into n sub-matrices vertically to be able to include the
time dependent nature of the saturation distribution in the matrix. Then he solves
one continuity equation for the fracture and n continuity equations for the matrix
( n sub-matrices). He identifies the horizontal transfer functions from matrix to
fracture (sub-matrix 2 to 1−n ) and bottom and top transfer functions. Ishimoto
considers the top and bottom transfer functions as the corresponding transfer
function in the z direction as established by Kazemi (1976), but modifies the
horizontal transfer function, which includes an integration of relative permeability
of the phase with respect to height obtained from capillary pressure curves.
Bech et al. (1991) propose a transfer function different than that of
Litvak’s transfer function. Bech et al. utilize the diffusion equation with the
nonlinear diffusion coefficient as used by Beckner et al. Bech et .al ’s model is
valid only for two- phase flow (oil-water and gas-oil). Their derivation considers
that flow is 2D and that the fluid and the rock are incompressible. They neglect
gravity effects in water-oil systems. In the gas-oil case they consider the gravity

16
effect and identify the matrix blocks in a grid cell in three groups. Group 1 is
surrounded by gas and residual oil in the fracture, if any. Group 2 have fractures
lying across the gas-oil contact, and Group 3 are the blocks fully submerged in oil
(and water, if any). It is assumed that only blocks belonging to groups 1 and 2
contain gas.
Chen et al. (1991) classify transfer functions in five categories as follows:
a) basic transfer functions, b) transfer functions with explicit gravitational effects,
c) transfer flow calculations based on discretization of matrix flow, such as
Multiple Interacting Continua (MINC) introduced by Pruess and Narasimhan
(1985), d) transfer functions with pseudo-curves, and e) other models.
The main characteristic of the basic transfer functions is that they are an
extension of Warren and Root’s model where no explicit gravitational effect was
included. They also neglect saturation and pressure gradients in the matrix blocks.
The second category enhances the explicit calculation of gravitational effects (in
the dual porosity model an additional effect is due to differences in fluid
elevations between matrix blocks and fractures). The third category corresponds
to matrix blocks being discretized into subdomains, with resulting finite
difference equations solved simultaneously with the fracture equations to
calculate matrix-fracture transfer flow. This method tends to have larger
computational costs. The fourth category corresponds to transfer functions that
use pseudo relative permeability and/or capillary pressure curves, which are

17
usually generated to account for gravitational effects. The fifth category
corresponds to other methods such as empirical transfer functions.
Chen et al. presents a detailed literature review of dual porosity models
and associated transfer functions for simulating naturally fractured reservoirs. He
focused on counter-current imbibition in totally immersed oil-saturated matrix
blocks and partially-immersed oil-saturated matrix blocks in water.
Chen et al. found that Sonier et al.’s method inaccurately calculates
gravitational effects when the water level in the matrix block is higher than the
water level in the fracture. They also found that the MINC method is able to
predict the two flow periods evident from fine-grid simulations, infinite acting
and late flow periods, but it under predicts oil flux at early times and over predicts
oil flux for totally and partially immersed matrix blocks compared with fine-grid
simulations.

18
Chapter 3 Problem Statement
The goal of this study is to determine methods of scaling dimensionless
variables while taking into account gravity segregation with gas injection in order
to simplify the analysis of the problem and thus identify the main parameters
controlling this process. This work has application in optimization, history
matching, and stochastic simulation if it can help to reduce the amount of
computer time required. The primary tasks are a) analysis of gravity segregation
with gas injection in a single matrix block, b) influence of 3D flow in gravity
segregation, c) determination of dimensionless scaling groups, and d) selection of
dual porosity models and comparing them with fine grid simulation of a matrix
block and also with fine grid simulation of a stack of matrix blocks separated by
fractures.

19
Chapter 4 Matrix-Fracture Gravity Drainage
This chapter reviews a 1D model in the vertical direction with gravity
drainage for oil and gas phases including capillary and gravity forces.
Additionally, boundary conditions are identified for gravity drainage, solving a
non-linear partial differential equation and comparing the solution with results
obtained from the Eclipse numerical simulator. This chapter also reviews gravity
drainage neglecting capillary pressure and compares the results with that obtained
from the partial differential equation with no capillary pressure.
4.1 MODEL
The basic representative element in a fractured reservoir model is one
block of rock representing the matrix, surrounded by fractures (on its faces). This
study begins with a 1D model that considers a block of matrix initially saturated
with oil at irreducible water saturation. The matrix boundaries (fractures) are
initially filled with gas, but the side boundaries are closed (assuming no lateral
flow). Flow thus only occurs in the vertical direction inside the matrix by gravity
segregation. Oil flows to the fracture at the bottom of the matrix and gas fills from
the top. The next section describes the mathematical representation for this
situation.
Darcy’s law for oil and gas phases are, respectively,

20
zkk
u o
o
roo ∂
Φ∂−=
µ (4.1)
zkk
u g
g
rgg ∂
Φ∂−=
µ (4.2)
where,
ou = oil flux, cm/sec
gu = gas flux, cm/sec
oΦ = oil potential, atm
gΦ = gas potential, atm
z = coordinate in vertical direction (positive upwards), cm
Considering constant oil and gas densities, potentials are defined by
zggp
cooo ρ+=Φ (4.3)
zggp
cggg ρ+=Φ (4.4)
where,
op = oil pressure, atm
gp = gas pressure, atm

21
The continuity equations for oil and gas, assuming constant density and
porosity are
0=∂
∂+
∂∂
tS
zu oo φ (4.5)
0=∂
∂+
∂∂
tS
zu gg φ (4.6)
where φ is porosity and oS and gS are oil and gas saturations, respectively.
Substituting Eqs. 4.1 and 4.2 into Eqs. 4.5 and 4.6, and assuming constant
porosity and permeability,
0=
∂Φ∂
∂∂−
∂∂
zk
zk
tS o
o
roo
µφ (4.7)
0=
∂Φ∂
∂∂−
∂∂
zk
zk
tS g
g
rgg
µφ (4.8)
One reasonable assumption to simplify the problem is that the viscous
pressure drop in the gaseous phase is negligible. This assumption is reasonable
since gas viscosity is typically very low compared to oil viscosity. Then,
0≈∂Φ∂z
g (4.9)

22
Capillary pressure is defined as
ogc ppP −= (4.10)
Substituting Eqs. 4.3 and 4.4 into Eq. 4.10 gives
zggz
ggP
coo
cggc ρρ +Φ−−Φ= (4.11)
Defining go ρρρ −=∆ , we have
zggP
cogc ρ∆+Φ−Φ= (4.12)
Taking the derivative of Eq. 4.12 with respect to z results in
c
ogc
gg
zzzP ρ∆+
∂Φ∂
−∂Φ∂
=∂∂
(4.13)
Substituting z
o
∂Φ∂
from Eq. 4.13 into Eq. 4.7 and considering the
approximation from Eq. 4.9 gives
0=
∆+
∂∂
−∂∂−
∂∂
c
c
o
roo
gg
zPk
zk
tS ρ
µφ (4.14)

23
Considering oµ to be a constant in Eq. 4.14, we have
0=
∆−
∂∂
∂∂+
∂∂
c
cro
o
o
gg
zP
kz
kt
S ρφµ
(4.15)
Figure 4.1 shows the boundary conditions of constant gas pressure at the
top of the matrix. The static oil pressure at the bottom of the matrix is equal to
pressure at the top of the matrix with the addition of pressure generated by the gas
column. This is the condition for a matrix block completely surrounded by gas
with negligible viscous pressure drops. For no flow of oil at the upper boundary,
0=∂Φ∂
=hz
o
z (4.16)
where h is the top of the matrix. From Eq. 4.13 at the top of the matrix,
hzchz
o
hz
g
hz
c
gg
zzzP
====
∆+∂Φ∂
−∂Φ∂
=∂∂ ρ (4.17)
Substituting Eq. 4.16 and the approximation given by Eq. 4.9,
hzchz
c
gg
zP
==
∆=∂∂ ρ (4.18)

24
An alternative way to obtain Eq. 4.18 is by substitution of the oil potential
given in Eq. 4.11 into Eq. 4.1,
∆+−Φ
∂∂−= z
ggP
zkk
uc
cgo
roo ρ
µ (4.19)
Since oil flux at top of the matrix is zero,
0=∆+∂∂
−∂Φ∂
c
cg
gg
zP
zρ (4.20)
Using the approximation of zero gas potential gradients,
chz
c
gg
zP ρ∆=∂∂
=
(4.21)
Equation 4.21 is the boundary condition at the upper boundary to solve
Eq. 4.14. The boundary condition at the bottom of the matrix is determined by oil
potential and saturation at the bottom of the matrix. At constant pressure, the
bottom of the fracture is 100% gas saturated, thus
hggpp
cghzgzg ρ+=
==0 (4.22)

25
The reference depth for determining potentials is at the bottom. Oil
potential at the bottom is then
hggP
cghzgzo ρ+=Φ
==0 (4.23)
The boundary condition at the bottom of the matrix must consider 0=cP .
Oil saturation at the bottom is then
wizo SS −==
10
(4.24)
4.1.1 Dimensionless Form
Equation 4.15 is made dimensionless in a traditional way, taking into
account the “range of action” of each variable (dependent and independent).
Multiplying Eq. 4.15 by 2h ,
0'2 =
∆−
∂∂
∂∂+
∂∂
cro
D
ocro
Do
o
gghk
zS
Pkz
kt
Sh ρ
φµ (4.25)
where
hzzD = (4.26)

26
Considering 0rok the end point oil relative permeability, dividing Eq. 4.25
by ( ) hggkSS
crowior ρ∆−− 01 , and using the following definitions for roDk , oDS ,
and cDP ,
0ro
roroD k
kk = (4.27)
wior
orooD SS
SSS
−−−
=1
(4.28)
hgg
PP
c
ccD
ρ∆= (4.29)
and then substituting Eqs. 4.27, 4.28, and 4.29 into Eq. 4.25,
010
=
−−
−∂∂
∂∂
∂∂+
∂∂
∆ wior
roD
D
oD
o
cDroD
Do
oD
cro
SSk
zS
SP
kz
kt
S
ggk
hφµρ
(4.30)
Multiplying Eq. 4.30 by ( )wioro SS
k−−1
φµ, gives
( )
01
0=
−
∂∂
∂∂
∂∂+
∂∂
∆
−−roD
D
oD
oD
cDroD
D
oD
cro
wioro kzS
SP
kzt
S
ggkk
SSh
ρ
φµ (4.31)

27
Equation 4.31 suggests dimensionless time should be defined as
tSSh
ggkk
twioro
cro
D )1(
0
−−
∆=
φµ
ρ (4.32)
Substituting Eq. 4.32 into Eq. 4.31, gives finally
01 =
−
∂∂
∂∂+
∂∂
D
cDroD
DD
oD
zP
kzt
S (4.33)
This is the basic equation in dimensionless form for the co-current flow of oil and
gas movement in the vertical direction when the gas potential gradient is
considered negligible.
Equations 4.18 and 4.24 are the boundary conditions to solve Eq. 4.15. A
dimensionless form of Eq. 4.18 is accomplished by multiplying by h , and
dividing it by hgg
c
ρ∆ , which gives
11
=∂∂
=DzD
cD
zP
(4.34)
where cDP and Dz are given by Eqs. 4.29 and 4.26 respectively. Transforming
Eq. 4.24 to dimensionless form is accomplished by dividing by )1( wior SS −− ,

28
wior
wi
zwior
o
SSS
SSS
−−−
=−−
=1
11
0
(4.35)
Subtracting wior
or
SSS
−−1 from both sides of Eq. 4.35,
wior
orwi
zwior
oro
SSSS
SSSS
−−−−
=−−
−
=11
10
(4.36)
Utilizing the definition of dimensionless oil saturation in Eq. 4.28,
1
0=
=DzoDS (4.37)
4.1.2 Oil Flux Equation
Substituting Eq. 4.15 into Eq. 4.5, gives
∆−
∂∂
∂∂=
∂∂
c
cro
o
o
gg
zP
kz
kz
u ρµ
(4.38)
Equation 4.38 can be solved by integration with separation of variables
and applying the upper boundary condition given by Eq. 4.18. The result is
∆−
∂∂
=c
cro
oo g
gzP
kku ρµ
(4.39)

29
Equation 4.39 can be used to determine oil flux at any position and time in the
matrix block.
4.1.2.1 Dimensionless Form of Oil Flux Equation
Multiplying Eq. 4.39 by 0rokh and utilizing the definitions of dimensionless
elevation ( Dz ) from Eq. 4.26 results in
∆−
∂∂
= hgg
zP
kkk
khu
cD
c
ro
ro
oroo ρ
µ 00 (4.40)
Dividing Eq. 4.40 by hgg
c
ρ∆ and utilizing the definitions of
dimensionless capillary pressure and dimensionless oil relative permeability (Eqs.
4.29 and 4.27, respectively),
−
∂∂
=∆
110 D
cDroD
o
cro
o zPkk
ggk
uµρ
(4.41)
This equation suggests
cro
oooD
ggkk
uu
ρ
µ
∆=
0 (4.42)
Substituting this equation into Eq. 4.41,

30
∂∂
−−=D
cDroDoD z
Pku 1 (4.43)
Appendix A shows the development of the finite difference method used
to solve Eqs. 4.33 and 4.43 with the boundary conditions given by Eqs. 4.34 and
4.37 for the top and bottom of the matrix, respectively. The dimensionless
variables Dz , roDk , oDS , cDP , Dt , and oDu are defined by Eqs. 4.26, 4.27, 4.28,
4.29, 4.32, and 4.42, respectively. Appendix G shows the code of the program in
C++. Appendix G also shows the input data listing used by Eclipse to corroborate
the model.
4.2 MODEL VERIFICATION
Table 4.1 shows data for testing Eqs. 4.33 and 4.43. The relative
permeability of oil and capillary pressure were calculated with Corey-type
equations given in Table 4.2 for dimensionless and non-dimensionless saturation
functions. Figures 4.2, 4.3, 4.4, and 4.5 show rok , cP , roDk , and cDP , respectively.
Figure 4.1 shows the model at two different times and also gives the
boundary conditions. The commercial simulator Eclipse was used to verify the
results. Figures 4.6, 4.7, and 4.8 show the formation volume factors for oil, gas
and the solubility of gas in oil ( oB , gB , and sR , respectively) utilized in the
model. A constant gas pressure of 80 atm (Table 4.1) was set at top of the matrix
block. The values utilized for oB , gB , and sR lie in a narrow range close to a

31
pressure value of 80 atm. Figure 4.9 shows the model used with Eclipse utilizing a
gridded system. Table 4.3 shows the geometric information used to construct this
simulation, along with porosity and permeability values. The first and last cells
represent the top and bottom fractures, respectively. In fracture cells capillary
pressure is zero and oil relative permeability and gas relative permeability are
both straight lines of unit slope with respect to their respective saturations.
The model of Fig. 4.9 has a fracture cell at the top and a fracture cell at the
bottom. Intermediate cells are matrix. In the top cell a well is connected and
controlled by constant injection pressure equal to 80 atm to simulate pressure
maintenance. The bottom cell has another well connected to the cell. This well is
controlled by constant pressure equal to 80.03 atm, which is the value based on
the gas gradient in the fracture.
Figure 4.10 shows saturation profiles obtained with the vertical drainage
model (Eq. 4.33) vs. Eclipse results. This graph shows that saturation profiles
match better at later run times. At very early times there is not a good match in the
saturation profiles. This mismatch affects oil flux from 100 to 1500 days
approximately (Fig. 4.11). Figure 4.10 also shows that at infinite time, the
saturation profile matches the saturation given by the static capillary pressure
profile. From this, there are two observations. First, capillarity retains oil in the
matrix. The greater the capillarity at high oil saturations, the greater the residual

32
oil saturation. Second, there is a limit in oil saturation given by the capillary
pressure curve at static conditions.
Figure 4.11 shows oil flux for Eq. 4.43 vs. Eclipse results. Figure 4.12
shows the cumulative oil production for both Eq. 4.43 and Eclipse. The difference
is due to neglecting gas viscous pressure drop in Eq. 4.33. Oil flux from Eclipse
(Fig. 4.11) shows there is a mismatch between 100 and 1500 days due to effect of
neglecting gas viscous pressure drop. Appendix F discusses this result compared
with that obtained from using gas relative permeability of unitary slope with
respect to gas saturation, which gives a better match. Additionally in Fig. 4.11, at
approximately 2600 days there is a small “peak” in Eclipse results, which is a
numerical error. Dividing only the bottom cell in 20 sub-cells partially smoothed
the “peak”. Figure 4.13 shows results of grid refinement to overcome this
numerical error sub-gridding only the bottom cell. The grid in Fig. 4.11 is 1x1x20
for x, y, and z directions.
4.2.1 Capillary Minimum Oil Saturation
There is a maximum capillary pressure defined at a minimum oil
saturation ( minoS ), which corresponds to the maximum capillary pressure
allowable with gravity segregation at the block matrix height ( h ). This maximum
of dimensionless capillary pressure corresponds to
1=cDP (4.44)

33
In the unusual case of threshold capillary pressure being greater than this
value, it is not possible to get any oil from the matrix. To get minoS we utilize the
dimensionless capillary pressure form given in Table 4.2:
( ) pceoDcDcD SPP −= 10 (4.45)
Substituting Eq. 4.44 in Eq. 4.45,
pce
cDoD P
S
1
0min11
−= (4.46)
minoDS is obtained substituting pce and 0cDP from Table 4.2 into Eq. 4.46
and from the definition of dimensionless oil saturation (Eq. 4.28) we get minoS . cP
evaluated at minoS and minoS are given in Table 4.4.
4.3 GRAVITY DRAINAGE WITH NEGLIGIBLE CAPILLARY PRESSURE
Equation 4.33 includes viscous, capillary, and gravity forces. To simplify
its analysis in this section capillary forces are considered negligible. From Eq.
4.13 considering 0=cP ,
c
go
gg
zzρ∆+
∂Φ∂
=∂Φ∂
(4.47)

34
Introducing the consideration given by Eq. 4.9
≈
∂Φ∂
0z
g ,
c
o
gg
zρ∆=
∂Φ∂
(4.48)
Substituting Eq. 4.48 in the Darcy’s law (Eq. 4.1),
co
roo g
gkku ρ
µ∆−= (4.49)
Substituting Eq. 4.49 into the continuity equation (Eq. 4.5) gives
0=
∆
∂∂−
∂∂
co
roo
ggk
kzt
S ρµ
φ (4.50)
considering k , oµ , and ρ∆ constant,
0=∂
∂∆−
∂∂
zk
ggk
tS ro
co
o ρµ
φ (4.51)
This is a non-linear first-order partial differential equation. Equation 4.51
can also be obtained from Eq. 4.15 considering 0=∂∂
zPc . Multiplying Eq. 4.51 by
0/ rokh ,

35
00 =∂
∂∆−
∂∂
D
roD
co
o
ro zk
ggk
tS
kh ρ
µφ (4.52)
where Dz is defined with Eq. 4.26 and roDk is defined with Eq. 4.27. Multiplying
Eq. 4.52 by wior
wior
SSSS
−−−−
11
,
( )
01
0=
∂∂
−∂
∂
∆
−−
D
roDoD
cro
wioro
zk
tS
ggkk
SSh
ρ
φµ (4.53)
oDS is defined with Eq. 4.28. Substituting Eq. 4.32 for Dt in Eq. 4.53,
0=∂
∂−
∂∂
D
roD
D
oD
zk
tS
(4.54)
or
0=∂∂
−∂∂
D
oD
oD
roD
D
oD
zS
dSdk
tS
(4.55)
This is a form of the “Buckley-Leverett” equation, but with a negative
sign instead of a positive one because of the sign convention with respect to
depth.

36
Equation 4.49 (oil flux equation) in dimensionless form is obtained by
dividing by 0rok ,
croD
oro
o
ggkk
ku ρ
µ∆−=0 (4.56)
where roDk is given by Eq. 4.27 and considering the definition of oDu given by
Eq. 4.42,
roDoD ku −= (4.57)
This means that dimensionless oil flux at any point in the matrix is equal
to dimensionless relative permeability of oil for the case of no capillarity, as
expected the solution of Eq. 4.55 by the method of characteristics is
DSoD
roDSD t
dSdkz
oD
oD−=1 (4.58)
At the bottom of the matrix, 0=Dz , thus
oD
oD
SoD
roDSD
dSdk
t 1= (4.59)

37
Dimensionless oil flux from matrix to fracture can also be represented as a
dimensionless transfer function from matrix to fracture. Appendix B shows the
definitions of dimensionless variables when utilizing transfer function instead of
the flux equation. From Eq. 4.43 and Eq. B.8,
oDoD u=τ (4.60)
Where oDτ is defined with Eq. B.7 from Appendix B. To test the model
with no capillarity, dimensionless relative permeability of oil in Table 4.2 was
utilized.
The velocity of a given saturation is proportional to the derivative of oil
relative permeability. Figure 4.14b shows the results of the calculations related to
dimensionless oil relative permeability (Fig. 4.14a). Figure 4.15a shows
dimensionless oil relative permeability at the outlet of the matrix. From Eq. 4.57,
the dimensionless relative permeability of oil is the oil flux (Eq. 4.57) and the
dimensionless time for that oil flux is calculated with the inverse of the derivative
of dimensionless oil relative permeability (Eq. 4.59).
Due to Fig. 4.15a shows roDk at the outlet of the matrix block then this
roDk is the oil flux at the outlet of the matrix block accordingly to Eq. 4.57.
Declination of oil flux starts at dimensionless time equal )1(
1' =oDSkroD
, then oil

38
flux has a unitary value in dimensionless time from zero to )1(
1' =oDSkroD
and
after that oil flux decreases accordingly to '
1
roDk
. Figure 4.16 shows saturation
profiles at different times for the analytical saturation profiles compared with the
finite difference solution. The mismatch between analytical and numerical
profiles is probably due to numerical dispersion.
Figure 4.17 shows the transfer function for the analytical and the finite
difference methods. This figure also shows the time of declining oil flux from the
matrix, which depends on the slope of the oil relative permeability curve. When
we have a unit slope in the oil relative permeability (the ideal case of free oil
flow) the initiation of flux declining is at 1=Dt . The flux decline curve depends
on the shape of the oil relative permeability. The more concave up the rok curve
the steeper the decline in oil flux.
From Fig. 4.17, there are two types of flow from matrix to fracture with no
capillary pressure. Both flows converge at the following dimensionless time:
)1(1
' ==
oDroDD Sk
t (4.61)
For )1(
1' =
≤oDroD
D Skt ,

39
1=oDτ (4.62)
For )1(
1' =
≥oDroD
D Skt dimensionless oil flux (or transfer function) is
given by Eq. 4.57, therefore from Eq. 4.60,
roDoD k=τ (4.63)
Substituting the derivative of roDk into Eq. 4.59, where 0=Dz ,
oooD eoDo
oDe
oDoSD Se
SSe
t == −1
1 (4.64)
Substituting Eq. 4.63 in Eq. 4.64 and considering oeoDroD Sk = ,
oDo
oD
roDo
oDSD e
Ske
St
oD τ== (4.65)
This equation relates dimensionless oil saturation at the outlet of the
matrix with dimensionless transfer function also at the outlet of the matrix and
dimensionless time.
To get average oil saturation at time Dt with no capillary pressure, is by
integrating the curve for a specific Dt (Fig. 4.14b). For )1(
1' =
≤oDroD
D Skt and
substituting the derivative of oil relative permeability definition in Eq. 4.58,

40
De
oDoSD tSez o
oD
11 −−= (4.66)
Average oil saturation is obtained by integrating Eq. 4.66 from zero to one
and dividing by Dz ,
( )∫ −−=1
0
1 ~~11oDD
eoDo
DoD SdtSe
zS o (4.67)
where oDS is the average dimensionless oil saturation and oDS~ is an integration
variable. Solving Eq. 4.67 and considering 1=Dz ,
DoD tS −=1 (4.68)
This is the average oil saturation for ( )11
' =≤
oDroDD Sk
t . To get an average
oil saturation for )1(
1' =
≥oDroD
D Skt (Fig. 4.14b) is with the integration process,
but changing Eq. 4.66 as a function of Dz ,
11
1 −
−=
oe
Do
DoD te
zS (4.69)
integrating from zero to one and dividing by Dz ,

41
D
e
Do
D
DoD zd
tez
hS
o ~~11 11
1
0
−
∫
−= (4.70)
where Dz~ is an integration variable. Solving Eq 4.70 and considering 1=Dh ,
( )111
−
−=
o
o
ee
DoDooD
teteS (4.71)
that is the average dimensionless oil saturation for )1(
1' =
≥oDroD
D Skt .
To obtain the transfer function as a function of average oil saturation for
( )11
' =≥
oDroDD Sk
t , first obtain oDoD S/τ from Eq. 4.65,
DozoD
oD
teSD
1
1
==
τ (4.72)
Substituting Eq. 4.72 into Eq. 4.71,
( )1
1−
−=
o
o
ee
oD
oD
Do
oDooD
SeS
eSτ
τ (4.73)
Substituting Eq. 4.63 into Eq. 4.73 and considering that oeoDroD Sk = ,

42
( )1
1−
−=
o
oo
o
ee
oD
eoD
eoDo
oDooD
SS
SeS
eS (4.74)
or
oDo
ooD S
ee
S1−
= (4.75)
This equation suggests the calculation of average oil saturation in the
matrix for ( )11
' =≥
oDroDD Sk
t . Substituting oDS from Eq. 4.75 into Eq. 4.73,
( ) 11 −
−=
o
o
ee
oDo
ooDoD Se
eττ (4.76)
Considering that oeoDroDoD Sk ==τ in the right hand side of Eq. 4.76 and
substituting Eq. 4.75 into Eq. 4.76,
( )1
11
−
−
−=
o
oo e
e
oDo
o
e
o
oDo
oD Se
ee
Se
τ (4.77)
or

43
oe
o
oDooD e
Se
−=
1τ (4.78)
or from Eq. 4.63,
oe
o
oDoroD e
Sek
−=
1 (4.79)
Due to the fact that dimensionless transfer function with gravity drainage
and no capillary pressure is equal to dimensionless oil relative permeability (Eq.
4.63), roDk from Eq. 4.79 can be a pseudo oil relative permeability ( *roDk ) with no
capillarity to apply in a dual porosity model.
oe
o
oDoroD e
Sek
−=
1* (4.80)
this is for )1(
1' =
≥oDroD
D Skt . For
)1(1
' =≤
oDroDD Sk
t pseudo relative permeability
of oil is
1* =roDk (4.81)
Figure. 4.18 shows average oil saturation calculated with Eqs. 4.68 and
4.71, with the average oil saturation calculated from the vertical drainage model.

44
Figure 4.19 shows the pseudo oil relative permeability calculated with Eqs. 4.80
and 4.81 and with the Corey type equation (Table 4.2). Figure 4.20 shows the
same Fig. 4.19 on a log-log scale. Figure 4.21 shows the dimensionless transfer
function for different oil relative permeabilities compared with the vertical
drainage model. The different exponents oe indicate different oil relative
permeability curves.
4.3.1 OIL RELATIVE PERMEABILITY IN TABULAR FORM
The previous section discusses gravity drainage with no capillary pressure
and oil relative permeability represented by Corey type equations. This section
reviews the case of oil relative permeability in tabular form.
The first step is to represent oil saturation and oil relative permeability
both in dimensionless form with Eqs. 4.28 and 4.27 respectively (first and second
column in Table 4.5), then,
1. Determine the derivative of oil relative permeability with respect to
dimensionless oil saturation. This saturation is at the outlet of matrix
block.
2. Identify the intersection of early flow period and late flow period with the
dimensionless time given by Eq. 4.61. Then, calculate Dt supposing
dimensionless saturations at the outlet of the matrix block with Eq. 4.59
(column 6, Table 4.5).

45
3. Determine average oil saturation ( oDS ) in the matrix block for each Dt
related to oil saturation at the outlet of the matrix. For Dt less or equal
than Dt from Eq. 4.61, oDS is calculated with Eq. 4.68. For Dt greater or
equal than Dt from Eq. 4.61, construct a saturation profile in the matrix
( oDS vs. matrix height) with Eq. 4.58, the area bellow the curve (integral)
is the average oil saturation (Fig. 4.14 b).
4. Determine a constant eC for each data in the table with Eq. 4.82. In this
case eC is the same for each saturation value (column 8, Table 4.5). From
Eq. 4.76.
oD
oDe
SS
C−
=1
1 (4.82)
5. Determine pseudo dimensionless oil relative permeability ( *roDk ) with Eq.
4.80 and Eq. 4.81 substituting the value of eC instead of oe . Finally,
obtain pseudo oil relative permeability substituting *roDk instead of roDk
into Eq. 4.27.
The previous sections consider gravity effects with no capillary pressure.
Figure 4.22 shows the effects in the transfer function with variation of capillary
pressure, utilizing different capillary exponents ( pce ). In general, the greater the
exponent the less the capillary effect. When capillary pressure increases the
transfer function declines more quickly.

46
The next chapter reviews dual porosity models that include gravity and
capillary pressure effects. Then we will talk more about capillarity in the next
chapter.
In summary, this chapter reviews an equation for gravity drainage of oil
and gas, which was solved with the finite difference method and gives acceptable
results comparing with results obtained from the Eclipse numerical simulator.
Additionally, neglecting capillary pressure in the non-linear partial differential
equation an analytical solution is obtained that is function of the derivative of oil
relative permeability. From this, a pseudo oil relative permeability to be used in
dual porosity models is analytically obtained from a Corey type representation of
oil relative permeability. Finally, a procedure was established to obtain a pseudo
oil relative permeability with tabular data of oil relative permeability.

47
Table 4.1: Basic data used for gravity segregation model.
Table 4.2: Saturation functions used in calculations (dimensionless and non-dimensionless).
ge
wior
ororgrg SS
SSkk
−−
−−=1
10 32.00 =rgk 2=ge
oe
wior
orororo SS
SSkk
−−
−=1
0 10 =rok 3=oe
pce
wior
orocc SS
SSPP
−−
−−=1
10 60 =cP atm 6=pce
eooDroDroD Skk 0= 10 =roDk 3=oe
( ) oeoDcDcD SPP −= 10 19.290 =cDP
6=pce
Description ValueResidual total liquid saturation 0.55Residual oil saturation 0.40Initial (residual) water saturation 0.15Oil density, g/cm 3 0.814242Gas density, g/cm 3 0.106556End-point oil relative permeability 1.00End-point gas relative permeability 0.32Maximum gas saturation 0.45Maximum oil saturation 0.85Critical gas saturation 0.00Matrix block thickness, m 3.00Oil viscosity, cp 3.14Gas viscosity, cp 0.0149Matrix porosity 0.06Matrix permeability, md 0.20Presssure at top of matrix, atm 80

48
Table 4.3: Geometry, porosity, and permeability utilized in Eclipse for a matrix block model with top and bottom fractures.
Table 4.4: Minimum saturation with its capillary pressure (dimensionless and non-dimensionless) for a matrix block of 3 m thickness.
Parameter Value 0
cDP 29.19 0rDk 1.0
minoDS 0.4301
minoS 0.5935
( )minoDcD SP 1.0
( )minoc SP 0.2055
Cells in z Direction1 2 to 21 22
∆X, cm 15 15 15∆Y, cm 15 15 15∆Z, cm 0.1 15 0.1Porosity, fraction 1 0.06 1k- x direction, darcy 5 0.2 5k- y direction, darcy 5 0.2 5k- z direction, darcy 5 0.2 5Tops, m 1200*
*top of cell 2 only (matrix begins)
Description
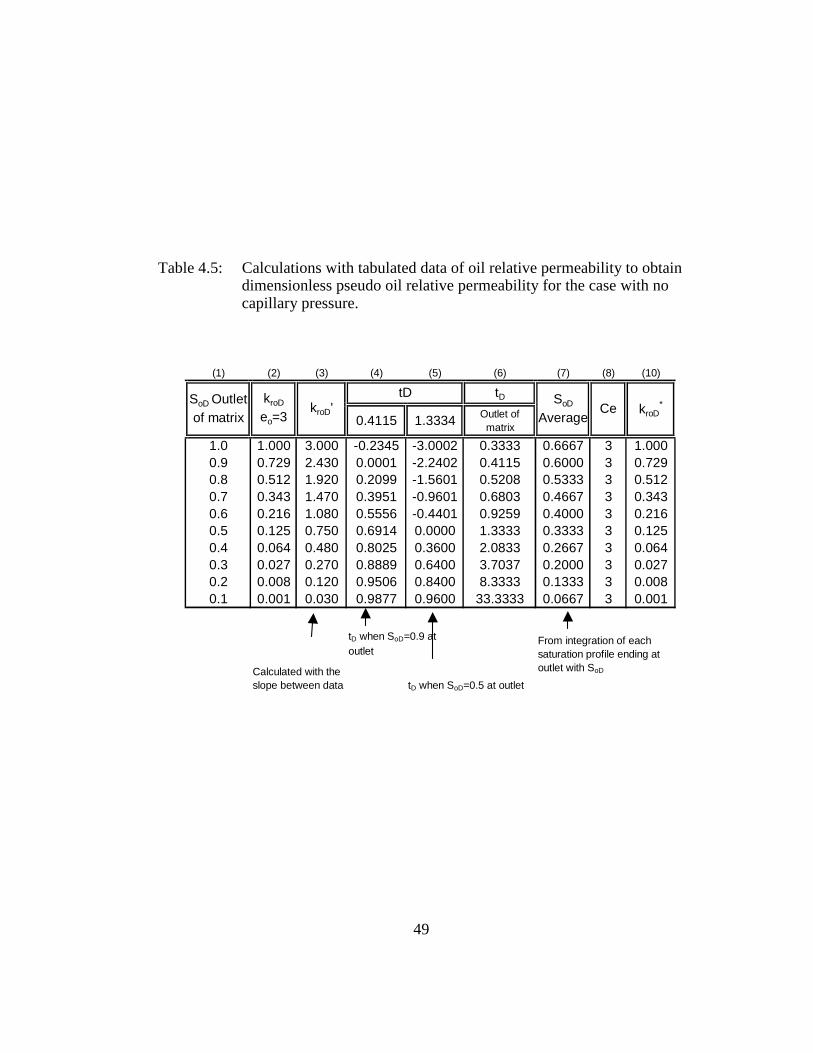
49
Table 4.5: Calculations with tabulated data of oil relative permeability to obtain dimensionless pseudo oil relative permeability for the case with no capillary pressure.
(1) (2) (3) (4) (5) (6) (7) (8) (10)
tD
0.4115 1.3334 Outlet of matrix
1.0 1.000 3.000 -0.2345 -3.0002 0.3333 0.6667 3 1.0000.9 0.729 2.430 0.0001 -2.2402 0.4115 0.6000 3 0.7290.8 0.512 1.920 0.2099 -1.5601 0.5208 0.5333 3 0.5120.7 0.343 1.470 0.3951 -0.9601 0.6803 0.4667 3 0.3430.6 0.216 1.080 0.5556 -0.4401 0.9259 0.4000 3 0.2160.5 0.125 0.750 0.6914 0.0000 1.3333 0.3333 3 0.1250.4 0.064 0.480 0.8025 0.3600 2.0833 0.2667 3 0.0640.3 0.027 0.270 0.8889 0.6400 3.7037 0.2000 3 0.0270.2 0.008 0.120 0.9506 0.8400 8.3333 0.1333 3 0.0080.1 0.001 0.030 0.9877 0.9600 33.3333 0.0667 3 0.001
Calculated with the slope between data
tD when SoD=0.9 at outlet
tD when SoD=0.5 at outlet
kroD*SoD
AverageCe
From integration of each saturation profile ending at outlet with SoD
kroD'kroD
eo=3
tDSoD Outlet of matrix
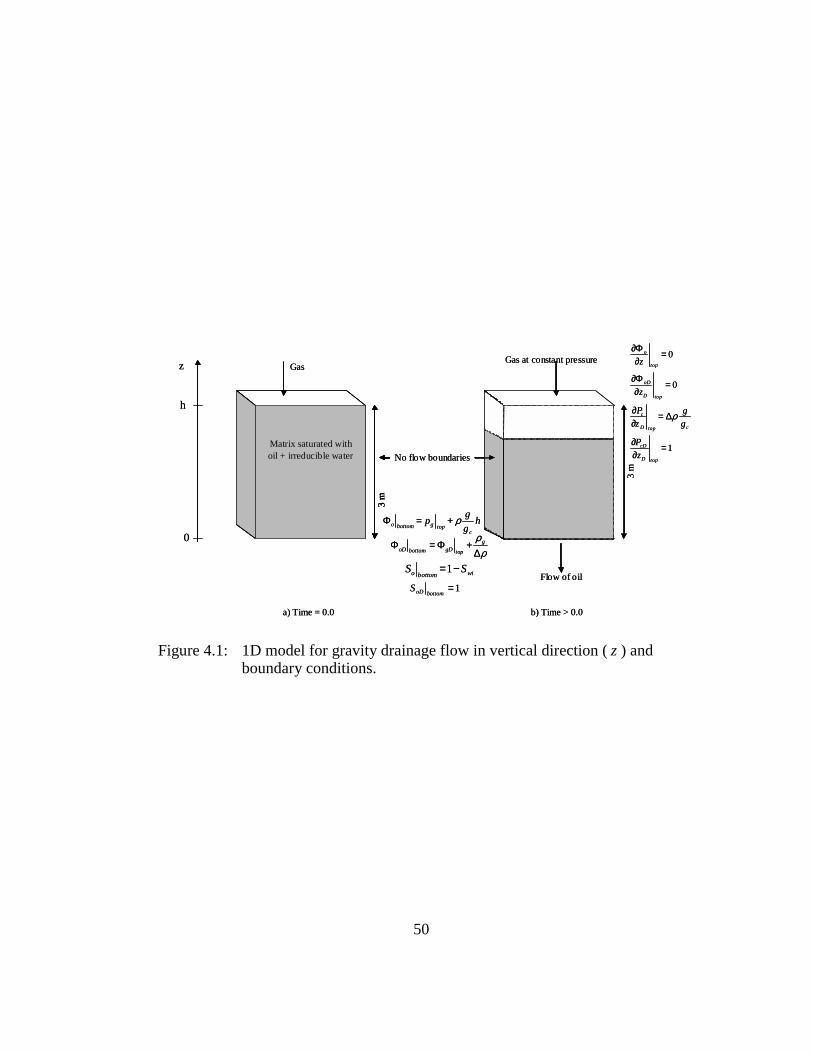
50
Figure 4.1: 1D model for gravity drainage flow in vertical direction ( z ) and boundary conditions.
Matrix
b) Time > 0.0
3 m
a) Time = 0.0
GasGas at constant pressure
No flow boundariesMatrix saturated with oil + irreducible water
3 m
Flow of oil
1
0
0
=∂∂
∆=∂∂
=∂Φ∂
=∂Φ∂
topD
cD
ctopD
c
topD
oD
top
o
zP
gg
zP
z
z
ρ
hggp
ctopgbottomo ρ+=Φ
ρρ∆
+Φ=Φ g
topgDbottomoD
wibottomo SS −=1
1=bottomoDS
0
h
z
Matrix
b) Time > 0.0
3 m
a) Time = 0.0
GasGas at constant pressure
No flow boundariesMatrix saturated with oil + irreducible water
3 m
Matrix saturated with oil + irreducible water
3 m
Flow of oil
1
0
0
=∂∂
∆=∂∂
=∂Φ∂
=∂Φ∂
topD
cD
ctopD
c
topD
oD
top
o
zP
gg
zP
z
z
ρ
hggp
ctopgbottomo ρ+=Φ
ρρ∆
+Φ=Φ g
topgDbottomoD
wibottomo SS −=1
1=bottomoDS
0
h
z

51
Figure 4.2: Relative permeability of oil utilized for simulation of gravity drainage in a matrix-block.
Figure 4.3: Gas-oil capillary pressure utilized for simulation of gravity drainage in a matrix block with top and bottom fractures.
0.0
0.2
0.4
0.6
0.8
1.0
0.3 0.4 0.5 0.6 0.7 0.8 0.9Oil Saturation
Oil
Rel
ativ
e P
erm
eabi
lity
0
1
2
3
4
5
6
0.4 0.5 0.6 0.7 0.8 0.9Oil Saturation
Cap
illary
Pre
ssur
e, a
tm

52
Figure 4.4: Dimensionless oil relative permeability utilized for simulation of gravity drainage in a matrix block with top and bottom fractures.
Figure 4.5: Dimensionless gas-oil capillary pressure for simulation of gravity drainage in a matrix block with top and bottom fractures.
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.2 0.4 0.6 0.8 1.0Dimensionless Oil Saturation
Dim
ensi
onle
ss O
il R
elat
ive
Perm
eabi
lity
0
5
10
15
20
25
30
0.0 0.2 0.4 0.6 0.8 1.0Dimensionless Oil Saturation
Dim
ensi
onle
ss C
apill
ary
Pre
ssur
e
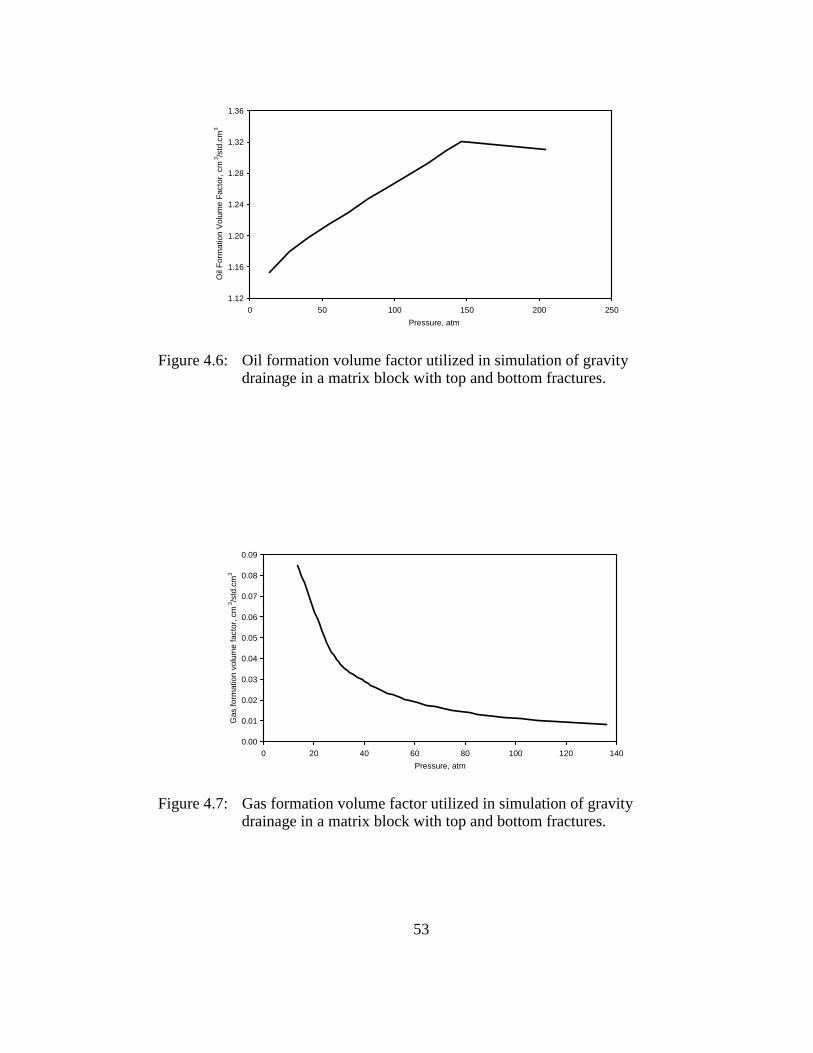
53
Figure 4.6: Oil formation volume factor utilized in simulation of gravity drainage in a matrix block with top and bottom fractures.
Figure 4.7: Gas formation volume factor utilized in simulation of gravity drainage in a matrix block with top and bottom fractures.
1.12
1.16
1.20
1.24
1.28
1.32
1.36
0 50 100 150 200 250Pressure, atm
Oil
Form
atio
n Vo
lum
e Fa
ctor
, cm
3 /std
.cm
3
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0 20 40 60 80 100 120 140Pressure, atm
Gas
form
atio
n vo
lum
e fa
ctor
, cm
3 /std
.cm
3

54
Figure 4.8: Solubility of gas in oil utilized for simulation of gravity drainage in a matrix block with top and bottom fractures.
Figure 4.9: 1D simulation with Eclipse to simulate gravity drainage in a matrix block with top and bottom fractures.
0
20
40
60
80
100
120
140
160
10 20 30 40 50 60 70 80 90Pressure, atm
Solu
bilit
y of
Gas
in O
il, s
td.c
m3 /s
td.c
m3
Matrix saturated with oil + irreducible water
k=0.2 md
3 m
Gas at constant pressure
Oil Production in bottom cell
0.1 cm, k=5 Darcy
0.1 cm, k=5 Darcy
Top cell
Bottom cell
Matrix saturated with oil + irreducible water
k=0.2 md
3 m
Gas at constant pressure
Oil Production in bottom cell
0.1 cm, k=5 Darcy
0.1 cm, k=5 Darcy
Top cell
Bottom cell

55
Figure 4.10: Oil saturation profiles in the matrix block with gravity drainage, simulating with the vertical drainage equation and Eclipse.
Figure 4.11: Oil flux from the vertical drainage equation and Eclipse simulating a matrix block with gravity drainage.
0
50
100
150
200
250
300
0.5 0.6 0.7 0.8 0.9 Oil Saturation
Hei
ght A
bove
Mat
rix B
otto
m, c
m
Eclipse 736 days
Eclipse 1092 days
Eclipse 2557 days
Vertical drainage equation 729 days
Vertical drainage equation 1094 days
Vertical drainage equation 2553 days
Static
1E-08
1E-07
1E-06
1E-05
1E-04
10 100 1000 10000Time, days
Oil
Flux
, bbl
/day
/ft2
Vertical drainage equation
Eclipse

56
Figure 4.12: Cumulative oil production from a matrix block with top and bottom fractures simulating gravity drainage with vertical drainage equation and Eclipse.
Figure 4.13: Oil flux for the times having numerical errors. Refinement is only in the bottom cell with 10 and 20 sub-cells for gravity drainage case.
0
0.001
0.002
0.003
0.004
0.005
0.006
0 1000 2000 3000 4000 5000 6000 7000
Time, days
Cum
ulat
ive
Oil
Prod
uctio
n, b
bl
Vertical drainage equation
Eclipse
1E -06
1E -05
1E -04
1000 100 00T im e , days
Oil
Flux
, bbl
/d/ft
2
N o rm a l g rid , 1 X1X2 2 ce lls (x,y, a nd z)
O n ly b o tto m ce ll re fine d w ith 10 sub -ce lls in z
O n ly b o tto m ce ll re fine d w ith 20 sub -ce lls in z

57
a) Dimensionless oil relative permeability.
b) Saturation profiles at different dimensionless time.
Figure 4.14: Dimensionless oil saturation profiles at different dimensionless times and the relation with dimensionless oil relative permeability for the analytical solution of gravity drainage with no capillary pressure in a matrix block.
0.0
0.2
0.4
0.6
0.8
1.0
0 0.2 0.4 0.6 0.8 1
Dimensionless Oil Saturation
Dim
ensi
onle
ss O
il R
elat
ive
Per
mea
bilit
y
0.0
0.2
0.4
0.6
0.8
1.0
0 0.2 0.4 0.6 0.8 1
Dimensionless Oil Saturation
Dim
ensi
onle
ss M
atrix
Hei
ght
tD
0.1
0.2
0.3
0.4
0.5

58
a) Dimensionless oil relative permeability at the outlet of the matrix vs. dimensionless time.
b) Diagram dimensionless matrix height vs. dimensionless time.
Figure 4.15: Dimensionless oil relative permeability at the outlet of the matrix and diagram dimensionless matrix height vs. dimensionless time for gas oil gravity drainage with no capillary pressure.
0.0
0.2
0.4
0.6
0.8
1.0
0 0.5 1 1.5 2 2.5 3Dimensionless Time
Dim
ensi
onle
ss M
atrix
Hei
ght
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5 3
Dimensionless Time
Dim
ensi
onle
ss O
il R
elat
ive
Per
mea
bilit
y

59
Figure 4.16: Saturation profiles at different times for gravity drainage in a matrix block with no capillarity for vertical drainage equation and analytical solution.
Figure 4.17: Dimensionless transfer function for gas oil gravity drainage in a matrix block with no capillarity obtained with the analytical solution and the vertical drainage equation.
0
100
200
300
0.4 0.5 0.6 0.7 0.8Oil Saturation
Mat
rix H
eigh
t, cm
429.1 days (Analytical)
644 days (Analytical)
1073 days (Analytical)
429.1 days (Vertical drainage equation)
644 days (Vertical drainage equation)
1073 days (Vertical drainage equation)
0.01
0.10
1.00
0.010 0.100 1.000 10.000Dimensionless Time
Dim
ensi
onle
ss T
rans
fer F
unct
ion
Analytical solution
Vertical drainage equation

60
Figure 4.18: Dimensionless average oil saturation vs. time obtained from gas-oil gravity drainage for a matrix block with vertical drainage equation with no capillarity and the analytical solution also with no capillarity.
Figure 4.19: Pseudo oil relative permeability obtained for gravity drainage and no capillary pressure and Corey type oil relative permeability ( 3=oe ).
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
Dimensionless Time
Dim
ensi
onle
ss A
vera
ge O
il Sa
tura
tion
Vertical drainage equation with no capillarypressure
Analytical solution with no capillary pressure
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Dimensionless Average Oil Saturation
Dim
ensi
onle
ss O
il R
elat
ive
Per
mea
bilty
Pseudo dimensionless oil relativepermeability (kroD*)
True dimensionless oil relativepermeability with eo=3

61
Figure 4.20: Pseudo oil relative permeability obtained for gravity drainage and no capillary pressure and Corey type oil relative permeability ( 3=oe ).
Figure 4.21: Dimensionless transfer function for different dimensionless oil relative permeabilities (different oe ) obtained with analytical solution and vertical drainage equation.
0.0
0.1
1.0
0.1 1.0Dimensionless Average Oil Saturation
Dim
ensi
onle
ss P
seud
o O
il R
elat
ive
Perm
eabi
lity
Pseudo dimensionless oil relativepermeability (kroD*)
True dimensionless oil relativepermeability with eo=3
0.01
0.1
1
0.01 0.1 1 10Dimensionless Time
Dim
ensi
onle
ss T
rans
fer F
unct
ion
Analytical Solution (eo=2)
Analytical solution (eo=5)
Vertical drainage equation (eo=2)
Vertical drainage equation (eo=5)

62
Figure 4.22: Dimensionless transfer function for gravity drainage in a matrix block with and without capillarity ( pce ) simulated with the vertical drainage equation neglecting gas viscous pressure drop.
0.01
0.10
1.00
0.01 0.10 1.00 10.00DimensionlessTime
Dim
ensi
onle
ss T
rans
fer F
unct
ion
With no capillary pressure
With capillarity and capillary exponent epc=6
With capillarity and capillary exponent epc=2

63
Chapter 5 Dual Porosity Gravity Segregation Models
This chapter reviews different dual porosity transfer function models for
gravity drainage including capillary and gravity forces. Additionally, this chapter
presents a procedure to obtain pseudo capillary pressure curve to be used in dual
porosity models using fine grid simulation in a matrix block, or an exponential
equation at late flow with gravity drainage.
5.1 GRAVITY DRAINAGE FLUX CALCULATION
Equation 4.32 represents the oil flux at any vertical position in a matrix
block. To evaluate the flux out of the matrix with gravity drainage, Eq. 4.32 must
be evaluated at the bottom boundary of the matrix. Observing Eq. 4.32, the flux
from matrix to fracture with gravity drainage includes relative permeability to oil,
capillary pressure and a gravity term.
On the other hand, dual porosity models utilize average properties for the
entire matrix block and the entire surrounding fracture system. Some models have
the capacity to calculate an effective level of fluids in the simulation cell to
compute transfer due to gravity. Section 4.4 of the previous chapter evaluates
properties with average saturation and no capillarity. This chapter presents
various dual porosity models for matrix-fracture transfer that include the effects
of viscous flow, gravity, and capillarity.

64
5.2 ECLIPSE MODEL
Based on positive flow being out of the matrix, the basic Eclipse dual
porosity gravity drainage model considers the following equations for oil and gas
flow. This is the standard model in most dual porosity simulators.
( )
∆−∆+−=
cgmDgfDofomromo g
gSSzppk ρσλτ2
(5.1)
and
( )
∆−∆−−+−=
cgmDgfDcfcmofomrgmg g
gSSzPPppk ρσλτ2
(5.2)
where
ρ∆ = go ρρ − , 3/ cmgm
λ = mobility, cpcmcmstd //. 33
z∆ = matrix block height, cm
gfDS = fractional volume of movable gas phase in the fracture
gmDS = fractional volume of movable gas phase in the matrix
Subscripts o , g , f , m , and r refer to oil, gas, fracture, matrix, and
relative, respectively.

65
Since pressure is calculated at the center of the simulation cell, the gravity
term is calculated with half the height of the matrix block. Note that gravity
affects the oil equation opposite to the gas equation.
Figure 5.1 shows a schematic of the Eclipse model. The fractional volume
of moveable gas (Appendix C) in the matrix is calculated as
wio
gmgmD SS
SS
−−=
min1 (5.3)
where,
gmS = gas saturation in the matrix
minoS = minimum oil saturation in the matrix
There is a similar saturation equation for the fracture ( )gfDS . For the
purpose of the present study initial gas saturation is zero. In Eqs. 5.1 and 5.2, roλ
and rgλ are the oil and gas mobilities, respectively:
oo
roro B
kµ
λ = (5.4)
gg
rgrg B
kµ
λ = (5.5)

66
where oB and gB are the formation volume factors for oil and gas,
respectively. Additionally, transfer functions for oil and gas are defined as
boo Vq /=τ (5.6)
bgg Vq /=τ (5.7)
where
oq = oil flow rate, cm3/sec
gq = gas flow rate, cm3/sec
bV = bulk volume of the matrix block, cm3
From Eq. 5.2,
( )c
gmDgfDcfcmrgm
gomof g
gSSzPPk
pp ρσλ
τ∆−∆++−=−
2 (5.8)
Substitution of Eq. 5.8 into Eq. 5.1,
( )c
gmDgfDcmcfrgm
g
rom
o
ggSSzPP
kkρ
σλτ
σλτ
∆−∆+−+= (5.9)
Oil and gas transfer functions can be calculated with oil and gas saturation
in the matrix block, respectively,

67
−=
o
oo B
Sdtd φτ (5.10)
−=
g
gg B
Sdtd φ
τ (5.11)
If average pressure in the matrix block is not changing much, φ , oB , and
gB can be taken constant in Eqs. 5.10 and 5.11 and considering the flow only of
oil and gas, water is at its irreducible value. Therefore,
dtdS
dtdS go −= (5.12)
which means
ggoo BB ττ −= (5.13)
Substituting Eq. 5.13 into Eq. 5.9
( )c
gmDgfDcmcfrg
g
ro
o
m
oo
ggSSzPP
kkkB ρ
µµσ
τ∆−∆+−=
+ (5.14)
or

68
( )
∆−∆+−
+
=c
gmDgfDcmcf
rg
g
ro
oo
mo g
gSSzPP
kkB
k ρµµ
στ (5.15)
The gas viscosity value is usually very small compared with that of oil.
Therefore, the second term in parentheses in the denominator of Eq. 5.15 can be
considered negligible, and
( )
∆−∆−−−=
cgmDgfDcfcmromo g
gSSzPPk ρσλτ (5.16)
If the fracture is completely filled with gas (Fig. 5.1), 1=gfDS , therefore
( )
∆−∆−−−=
cgmDcfcmromo g
gSzPPk ρσλτ 1 (5.17)
Additionally, omDgmD SS =−1 . Substituting into Eq. 5.10, and considering
that gmDomD SS −=1 ,
∆∆−−=
coDcfcm
romo
ggzSPP
kdt
dS ρφ
σλ (5.18)
Separating variables and integrating,

69
( )
∫
∆∆−−
=tS
S
coDcfcmro
o
m
oo
oi
ggzSPPk
dSk
tρ
σφµ
(5.19)
Appendix D shows Eqs. 5.17 and 5.19 in dimensionless form. To test the
model, we use the information given in Table 4.1. Dimensionless oil relative
permeability and capillary pressure both consider variations from zero to one as
shown in Figs. 4.4 and 4.5. Table 4.2 shows these equations.
The exponents 6=pce and 3=oe were utilized for dimensionless relative
permeability for oil and dimensionless capillary pressure. Additionally, 10 =roDk
and 10 =cDP were used. Dimensionless oil saturation (Appendix S) is defined as:
wio
oooD SS
SSS
−−−
=min
min
1 (5.20)
minoS is the minimum oil saturation obtained from capillary pressure at
static conditions at the top of the matrix block. To compare results obtained with
Eqs. 5.17 and 5.19, the dual porosity option was utilized with the Eclipse
simulator (Eclipse Technical Description, 1982-2000). Figure 5.2 shows the
model utilized by Eclipse, which consists of two matrix blocks and two fracture
blocks. Each matrix block is connected to its corresponding fracture block and
both fracture blocks are interconnected. During the runs, the bottom matrix block
was inactive to observe the transfer function from the upper matrix block to

70
fractures. The pore volume of fracture blocks was greater than that of the upper
matrix block in order to have no flow restrictions from matrix to fracture.
Table 5.1 gives the information utilized for the Eclipse runs. The porosity
for matrix corresponds to a field case (rock dolomite) and porosity in fracture
usually is given 10% of the total matrix-fracture bulk volume, but in this case was
considered equal to 6%. Figures 4.6, 4.7, and 4.8 show the formation volume
factors and solubility of gas in oil, respectively, that are used in the simulation.
The integral Eq. 5.19 is a function of oil relative permeability and
capillary pressure, which are functions of saturation. To solve Eq. 5.19, the
analytical equations for rok and cP from Table 4.2 were substituted into Eq. 5.19
and solved numerically from oiS to the oil saturation of interest. Figure 5.3 shows
the results of oil saturation vs. time obtained from integration. This figure also
shows results from the Eclipse simulator. Additionally, the transfer functions
calculated with both Eq. 5.17 and the Eclipse simulator are given in Fig. 5.4.
5.3 QUANDALLE AND SABATHIER MODEL
Figure 5.5 illustrates the matrix-fracture transfer model utilized by
Quandalle and Sabathier (1989). For the purpose of this study we utilize only the
flow in the vertical direction. The flow of oil from the matrix-fracture cell to the +z face (Fig. 5.5) is given by

71
( )2/zyxkq omofzromoz ∆
∆∆Φ−Φ−= ++ λ (5.21)
where
Φ = phase potential, atm
x∆ = dimension of the matrix-fracture block in the x direction,
cm
y∆ = dimension of the matrix-fracture block in the y
direction, cm
z∆ = dimension of the matrix-fracture block in the z direction,
cm
The superscript “ + ” is the positive face of the matrix-fracture (superscript
“–” is for the negative face of matrix-fracture cell).
The potential +Φofz refers to fracture oil potential at +z and the term omΦ
refers to matrix oil potential at the center of the matrix-fracture cell. Similar
equations are utilized for flow in the other directions ( +oxq , −
oxq , +oyq , −
oyq , and −ozq ).
The difference between them is with regard to what potential is utilized and
geometry. For the −z direction
( )2/zyxkq omofzromoz ∆
∆∆Φ−Φ−= −− λ (5.22)

72
The difference in oil potentials in Eq. 5.21 is given by
( )coomcoofcc
ofofzvomofomofz PPQzggppQpp −+
∆−−+−=Φ−Φ ++
2*ρ
( )2
* zggQ
cog
∆−− ρρ (5.23)
where
vQ = viscous flow coefficient (matching parameter)
cQ = capillary flow coefficient (matching parameter)
gQ = gravity flow coefficient (matching parameter)
coofP = capillary pressure oil-to-oil in the fracture, atm
coomP = capillary pressure oil-to-oil in the matrix, atm *ρ = ggfoofwwf SSS ρρρ ++
The “flow coefficients” for viscous, capillary, and gravity terms are used
to match gridded system results. Their default value is unity. Additionally,
viscous forces at the fracture can be neglected, oil-to-oil capillary pressure is zero.
Therefore,
2* z
ggpp
cofofz
∆+=+ ρ (5.24)
and

73
2* z
ggpp
cofofz
∆−=− ρ (5.25)
In the case of water-oil systems with no gas in the fracture wo ρρρ << * .
In a gas-oil system with no water in the fracture og ρρρ ≤≤ * . The range of
values of *ρ depends on phase saturations.
Flow in the z direction can be represented only by Eq. 5.21. Taking into
account these considerations in Eq. 5.23,
( )2
* zggpp
coomofomofz
∆−−−=Φ−Φ+ ρρ (5.26)
Note that *ρρ −o has a positive value. Therefore, it adds to omp and
helps oil potential (oil production). However, in a water-oil system the difference
in density changes to oρρ −* , which is also positive and helps oil to flow from
matrix to fracture. Substituting Eq. 5.26 into Eq. 5.21,
( )
∆−−−
∆∆∆−=+
22/* z
ggpp
zyxkq
coomofromoz ρρλ (5.27)
Multiplying this equation by zz ∆∆ / and considering bozo Vq /+=τ and
zyxVb ∆∆∆= ,

74
( )
∆−−−∆∆∆−=
22 * z
ggpp
zVyxk
coomof
bromoz ρρλτ (5.28)
Sigma ( )σ is defined as
( )
b
eff
VLA /
=σ (5.29)
where the subscript eff refers to effective. In this case,
( )z
yxLA eff ∆∆∆=/ (5.30)
then
2
1zz ∆
=σ (5.31)
Substituting Eq. 5.31 into Eq. 5.28 gives
( )
∆−−−−=2
2 * zggppk
coomofzromoz ρρσλτ (5.32)
As previously seen in the oil flow equations the gas flow rate for +z and −z directions is given by

75
( )2/zyxkq gmgfzrgmgz ∆
∆∆Φ−Φ−= ++ λ (5.33)
and
( )2/zyxkq gmgfzrgmgz ∆
∆∆Φ−Φ−= −− λ (5.34)
As in the oil case, gas rate is given by Eq. 5.33. The difference in gas
potential is given by the following equation.
( )cmcfcc
ofofzvomofgmgfz PPQzggppQpp −+
∆+−+−=Φ−Φ ++
2*ρ
( )2
* zggQ
cgg
∆−− ρρ (5.35)
In a water-oil system there are two changes in an equation similar to Eq.
5.35: 1) the capillary term sign changes to negative, which gives ( )cowmcowfc PPQ −− and 2) the gravity term changes to positive, which gives
( )2
* zggQ
cwg
∆− ρρ . Quandalle and Sabathier use a positive sign in all their
equations. This is in error.
In a gas-oil system, since og ρρρ ≤≤ * , the term *ρρ −g has a negative
value, thus decreasing omp and the gas potential. As a consequence, it favors oil

76
production. Like in the oil equation, the terms vQ , cQ and gQ have unit values.
Additionally, viscous forces in the fracture can be neglected, meaning
2* z
ggpp
cofofz
∆+=+ ρ (5.36)
and
2* z
ggpp
cofofz
∆−=− ρ (5.37)
Considering these observations in Eqs. 5.35,
( )2
* zggPPpp
cgcmcfomofgmgfz
∆−−−+−=Φ−Φ+ ρρ (5.38)
Capillarity adds to oil pressure and increases gas potential. As a
consequence it acts against oil production. By comparison, in a water-oil system
the difference in water potential is
( )2
* zggpppp
cwcmcfomofwmwfz
∆−−+−−=Φ−Φ+ ρρ (5.39)
In this case capillarity decreases oil pressure, thus decreasing water
potential and helping oil production. The term wρρ −* has a negative value that

77
finally decreases omp , as a consequence decreases water potential and helps oil
production. Substituting Eq. 5.38 into Eq. 5.33,
( )
∆−−−+−∆
∆∆−=+
22/* z
ggPPpp
zyxkq
cgcmcfomofrgmgz ρρλ (5.40)
Multiplying by zz ∆∆ / and considering Vbqgzg /+=τ and zyxVb ∆∆∆= in
Eq. 5.40,
( )
∆
∆−−−+−−= 2
*
22
z
zggPPpp
k cgcmcfomof
rgmgz
ρρλτ (5.41)
Substituting the definition of σ , Eq. 5.31, into Eq. 5.41,
( )
∆−−−+−−=2
2 * zggPPppk
cgcmcfomofzrgmgz ρρσλτ (5.42)
Getting omof pp − from Eq. 5.42,
( )22
* zggPP
kpp
cgcmcf
zrgm
gzomof
∆−++−−=− ρρσλ
τ (5.43)
Substituting Eq. 5.43 into Eq. 5.32,

78
( ) ( )
∆−−∆−++−−−=22
2 ** zggz
ggPP
kk
co
cgcmcf
zrgm
gzzromoz ρρρρ
σλτ
σλτ
(5.44)
Considering only the flow of oil and gas with water at its irreducible value
and that the average pressure in the matrix block is not changing much, φ , oB ,
and gB can be taken constant. Considering Eq. 5.13 in Eq. 5.44,
22z
ggPP
kkkB
ccfcm
rg
g
ro
o
zm
ooz ∆∆−−=
+− ρ
µµσ
τ (5.45)
or
∆∆−−
+
−=2
2 zggPP
kkB
k
ccfcm
rg
g
ro
oo
zmoz ρ
µµστ (5.46)
Neglecting the second term in parenthesis in the denominator due to gas
viscosity is very small compared with oil viscosity in Eq. 5.46,
∆∆−−−=2
2 zggPP
Bkk
ccfcm
oo
zromoz ρ
µστ (5.47)
Substituting Eq. 5.10 into Eq. 5.47

79
( )
∆−−−=∂
∂2
2 zggPP
kkt
S
cgocfcm
o
zromo ρρφµ
σ (5.48)
Separating variables and integrating,
( )
( )
∫
∆−−−
=tS
S
cgocfcmro
o
zm
oo
oiz
ggPPk
dSk
t
22
ρρσ
φµ (5.49)
Appendix D shows Eqs. 5.47 and 5.49 in dimensionless form. To test
these equations, the data in Table 4.1 and equations in Table 4.2 were utilized for
dimensionless capillary pressure and dimensionless oil relative permeability.
Dimensionless oil saturation was calculated with Eq. 5.20. Exponents 6=pce and
3=oe were utilized. Figure 5.6 shows oil saturation obtained with this model and
with the Eclipse simulator. Figure 5.7 shows the transfer function also for this
model and for the Eclipse simulator.
5.4 SONIER ET AL. MODEL
Sonier et .al (1986) describe their model for flow from matrix to fracture
for oil, gas, and water by
( )
−−+∆−−−= gmDwmDgfDwfD
coomofrommo SSSSz
ggppk ρσλτ (5.50)

80
( )
−∆−+−−−= wmDwfD
cwcwomcwofomofrwmmw SSz
ggPPppk ρσλτ (5.51)
( )
−∆−−+−−= gmDgfD
cgcgomcgofomofgrmmg SSz
ggPPppk ρσλτ (5.52)
Sonier et .al gas transfer function considers a positive sign in the gravity
term, which must be negative to act favorably to gravity drainage. For gas-oil
flow the water saturation terms in Eq. 5.50 are zero,
( )
−∆−−−= gmDgfD
coomofrommo SSz
ggppk ρσλτ (5.53)
From Eq. 5.52,
( )gmDgfDgcmcfgrmm
gomof SSzPP
kpp −∆++−−=− ρ
σλτ
(5.54)
Substitution of Eq. 5.54 into Eq. 5.53,
( )
−∆++−−−= gmDgfDgcmcf
rgmm
grommo SSzPP
kk ρ
σλτ
σλτ
( )
−∆− gmDgfD
co SSz
ggρ (5.55)

81
Considering only the flow of oil and gas with water at its irreducible value
and that the average pressure in the matrix block is not changing much, φ , oB ,
and gB can be taken constant. Substituting Eq. 5.13 into Eq. 5.55,
( )gmDgfDc
cfcmrg
g
ro
o
m
oo SSzggPP
kkkB
−∆∆−−=
+− ρ
µµσ
τ (5.56)
or
( )
−∆∆−−
+
−= gmDgfDc
cfcm
rg
g
ro
oo
mo SSz
ggPP
kkB
k ρµµ
στ (5.57)
Neglecting the second term in parentheses in the denominator and
rearranging terms, Eq. 5.57 gives
( )
−∆∆−−−= gmDgfDm
ccfcmrommo SSz
ggPPk ρσλτ (5.58)
This equation is a function of saturation and is the same as the Eclipse
model (Eq. 5.16), although the particular equations for oil and gas (Eqs. 5.50 and
5.52) are different than the Eclipse model (Eqs. 5.1 and 5.2).
For the case of a water-oil system, from Eq. 5.51,

82
( )wmDwfDc
wcwomcwofrwmm
womof SSz
ggPP
kpp −∆+−+−=− ρ
σλτ
(5.59)
Substituting into Eq. 5.50,
( )
−∆+−+−−= wmDwfD
cwcwomcwof
rwmm
wrommo SSz
ggPP
kk ρ
σλτσλτ
( )
−−+∆− gmDwmDgfDwfD
co SSSSz
ggρ (5.60)
Considering gfDS and gmDS equal to zero,
( )
−∆∆+−+−−= wmDwfD
ccwomcwof
rwmm
wrommo SSz
ggPP
kk ρ
σλτσλτ (5.61)
In this case the gravity term and the capillary term act in the same
direction for oil flow, but in the gas-oil flow (Eq. 5.58) the gravity term acts in the
opposite direction as the capillary term.
5.5 BECH ET AL. MODEL
Bech et al. (1991) propose a model described in Fig. 5.8 with gravity
drainage for flow of oil displaced by gas in the z direction. The flow only occurs
in the lower face of the matrix. As indicated in Fig. 5.8 the terms T, B, and I are
top, bottom, and gas-oil interface, respectively. Terms mz , omz , gmz , ofz , and gfz ,
refer to total matrix height in the z direction, fractional volume of moveable oil

83
in the matrix, fractional volume of moveable gas in the matrix, fractional volume
of moveable oil in the fracture, and fractional volume of moveable gas in the
fracture, respectively. The flux through the matrix block is calculated utilizing
Darcy’s law in the z direction for the gas phase from the top of the matrix to the
gas-oil interface and for the oil phase from gas-oil interface to matrix bottom.
Although Bech et al. did not give details of the development of their
model, the following considerations are used in the development of this model: 1)
constant pressure at top of the matrix, 2) constant pressure at the bottom of the
matrix that is equal at the pressure at the top of the matrix plus the gas column, 3)
flow in the vertical direction, 4) matrix is homogeneous and isotropic, 5) there is
complete phase segregation, 6) density is constant during displacement, 7)
viscosity is constant, and 8) potential gas gradient is approximately zero.
5.5.1 Oil flux
The oil flux from the gas-oil interface to the bottom of the matrix block
can be approximated by Darcy’s law in steady-state form:
( )omIomBom
romo z
ku Φ−Φ−=
λ (5.62)
where subscripts B and I mean bottom and gas-oil interface. The oil
potential at the gas-oil interface can be approximated as

84
omc
oomIomI zggp ρ+=Φ (5.63)
Substitution of Eq. 5.63 into Eq. 5.63,
−−Φ−= om
coomIomB
om
romo z
ggp
zk
u ρλ (5.64)
To relate pressure at the middle of the matrix and fracture with the
variable pressure at the gas-oil interface due to the interface movement in the
matrix,
( )2/zzggpp om
coomIom ∆−+= ρ (5.65)
and in the fracture,
( )2/zzggpp of
coofIof ∆−+= ρ (5.66)
From Eqs. 5.65 and 5.66,
( )2/zzggpp om
coomomI ∆−−= ρ (5.67)

85
( )2/zzggpp of
coofofI ∆−−= ρ (5.68)
Substituting Eq. 5.67 into Eq. 5.64,
( )
−∆−+−Φ−= om
coom
coomomB
om
romo z
ggzz
ggp
zk
u ρρλ2/ (5.69)
Since the datum depth is at the matrix bottom, oBomB p=Φ . Substituting
this into Eq. 5.69,
∆−−−= 2/z
ggpp
zk
uc
oomomBom
romo ρλ
(5.70)
Oil pressure at the matrix bottom with respect to oil pressure at the gas-oil
interface in the fracture is
ofc
oofIomB zggpp ρ+= (5.71)
Substitution of Eq. 5.68 into Eq. 5.71,
( ) ofc
oofc
oofomB zggzz
ggpp ρρ +∆−−= 2/ (5.72)
or

86
2/zggpp
coofomB ∆+= ρ (5.73)
Substituting Eq. 5.73 into Eq. 5.70,
∆−−∆+−= 2/2/ z
ggpz
ggp
zk
uc
oomc
oofom
romo ρρλ
(5.74)
or
( )omofom
romo pp
zk
u −−=λ
(5.75)
5.5.2 Gas flux
The gas flux in the z direction from the top of the matrix to the gas-oil
interface is calculated similarly:
( )gmTgmIgm
rgmg z
ku Φ−Φ−=
λ (5.76)
where subscript T means top of matrix block. The gas potential at the gas-
oil interface is
omc
ggmIgmI zggp ρ+=Φ (5.77)

87
From capillarity omIcmgmI pPp += . Substituting this into Eq. 5.77,
omc
gomIcmgmI zggpP ρ++=Φ (5.78)
Substituting Eq. 5.78 into Eq. 5.76,
Φ−++−= gmTom
cgomIcm
gm
rgmg z
ggpp
zk
u ρλ
(5.79)
Substitution of Eq. 5.67 into Eq. 5.79,
( )
Φ−+∆−−+−= gmTom
cgom
coomcm
gm
rgmg z
ggzz
ggpp
zk
u ρρλ
2/
(5.80)
In this case, the gas potential at the top of the matrix is given by
zggp
cggmTgmT ∆+=Φ ρ (5.81)
and the gas pressure at the top of the matrix is given by
gfc
ggfIgmT zggpp ρ−= (5.82)

88
From capillarity, ofIcfgfI pPp += . Substituting this into Eq. 5.82,
gfc
gofIcfgmT zggpPp ρ−+= (5.83)
Substituting Eq. 5.68 into Eq. 5.83,
( ) gfc
gofc
oofcfgmT zggzz
ggpPp ρρ −∆−−+= 2/ (5.84)
Substituting Eq. 5.84 into Eq. 5.81,
( ) zggz
ggzz
ggpP
cggf
cgof
coofcfgmT ∆+−∆−−+=Φ ρρρ 2/ (5.85)
or
( ) ofc
gofc
oofcfgmT zggzz
ggpP ρρ +∆−−+=Φ 2/ (5.86)
Substituting Eq. 5.86 into Eq. 5.80,
( )
+∆−−+−= om
cgom
coomcm
gm
rgmg z
ggzz
ggpp
zk
u ρρλ
2/
( )
−∆−+−− of
cgof
coofcf z
ggzz
ggpP ρρ 2/ (5.87)

89
Rearranging terms,
( )
−∆−−−+−= ofom
cofcfomcm
gm
rgmg zz
ggpppp
zk
u ρλ
(5.88)
or
( )
−∆−−−+−= gmgf
cofcfomcm
gm
rgmg zz
ggpppp
zk
u ρλ
(5.89)
5.5.3 Combination of Oil and Gas Flux Equations
The two previous sections present oil and gas transfer equations as
functions of oil pressure, gas pressure, capillary pressure, difference of oil and gas
density, and saturation fluid height in the matrix block. This section combines oil
and gas equations. From the gas flow equation (Eq. 5.89),
( )gmgfc
cfcmrgm
gmgomof zz
ggpp
kzu
pp −∆−−+=− ρλ
(5.90)
Substituting Eq. 5.90 into Eq. 5.75,
( )
−∆−−+−= gmgf
ccfcm
rgm
gmg
om
romo zz
ggpp
kzu
zk
u ρλ
λ (5.91)

90
Considering only the flow of oil and gas with water at its irreducible value
and that the average pressure in the matrix block is not changing much, φ , oB ,
and gB can be taken constant. Considering omDom zSz ∆= (Appendix C).
Changing transfer function to flux in Eq. 5.13 and substituting into Eq. 5.91,
( ) ( )gmgf
ccfcm
rg
gomD
ro
oomD
m
oo zzggpp
kS
kS
kzBu
−∆−−=
−−
∆− ρ
µµ 1 (5.92)
or
( )( )
−∆−−
−−∆
−= gmgfc
cfcm
rg
gomD
ro
oomDo
mo zz
ggpp
kS
kSzB
ku ρµµ 1
(5.93)
Equation 5.93 is the one presented by Bech et al. (1991). Considering gas
viscosity is very small compared with oil viscosity, the second term in brackets in
the denominator can be neglected (Appendix F),
( )
−∆−−
∆−= gmgf
ccfcm
omD
romo zz
ggpp
zSk
u ρλ (5.94)
Defining the transfer function as b
oo V
q=τ and substituting into Eq. 5.94,
( )
−∆−−
∆−= gmgf
ccfcm
omDb
romo zz
ggpp
zSVAk ρλτ (5.95)

91
Substituting Eq. 5.31 (σ ) into Eq. 5.95,
( )
−∆−−−= gmgf
ccfcm
omD
romo zz
ggpp
Sk ρσλτ (5.96)
Substituting Eq. 5.10 into Eq. 5.96
( )
−∆−−= gmgf
ccfcm
omDo
romo zzggpp
Skk
dtdS ρ
φµσ
(5.97)
Separating variables and integrating,
( )
( )
∫
−∆−−
=tS
Sgmgf
ccfcm
omD
ro
o
m
oo
oi zzggPP
Sk
dSk
tρ
σφµ
(5.98)
Figure 5.9 shows calculations with Eqs. 5.93 and 5.94 (including gas
mobility and with no gas mobility). Neglecting gas viscous pressure drop is
similar to using gas relative permeability represented by a straight line of unit
slope with respect to gas saturation (Appendix F). Additionally, gas mobility in
the matrix block is most important in zones where gas saturation is low, i.e. first
contact of gas in the matrix block. This effect is not important with the gridded
matrix block (Fig. 4.11), but it is enhanced at early times when gas saturation is
low in the dual porosity model (Fig. 5.9). Neglecting the gas mobility term in the

92
dual porosity models, the results match better with that of a gridded matrix block
at early times (Fig. 5.10).
Appendix D shows Eqs. 5.96 and 5.98 in dimensionless form. To test Eqs.
5.96 and 5.98, the same information utilized in section 5.2 was used.
5.6 RESULTS AND DISCUSSION
Figure 5.10 gives the results with the Eclipse transfer function, the
Quandalle and Sabathier transfer function, the Bech et al. transfer function, and
the gridded matrix. There are differences between them. The Quandalle and
Sabathier model and the Bech et al. model give the same results and both are
closer to fine grid simulation than the Eclipse model. Considering the Eclipse
model (Eq. D.3), the dimensionless transfer function must be zero when
dimensionless oil saturation reaches the static saturation. From capillary pressure
represented by a Corey type equation, integrating the area bellow the curve at
static conditions (Appendix E),
11+
=pc
oDstatic eS (5.99)
For the case under consideration 7/1=oDstaticS .
From Eqs. D.3 and D.18 in Appendix D, oil transfer function is zero when
dimensionless oil saturation and dimensionless capillary pressure reach the same

93
value. Considering 62.12=pce for the dimensionless capillary pressure equation,
the transfer function matches zero at static conditions in Eqs. D.3 and D.18.
Figure 5.11 shows the intersection between cDP and oDS (intersection represents
transfer function equal zero).
On the other hand, utilizing 1) the dimensionless pseudo relative
permeability of oil from Eqs. 4.80 and 4.81 and 2) the dimensionless transfer
function of the gridded system, we get a pseudo capillary pressure for Eclipse
model, Quandalle and Sabathier model, and Bech et al. model. Figure 5.12 shows
these pseudos. The “peaks” are due to the fact that dimensionless oil relative
permeability obtained with Eqs. 4.80 and 4.81 are analytical having an
intersection between early and late flow and the numerical solution with the
gridded system has smooth results. Pseudo capillary pressure with the Bech et al.
model is positive while pseudo capillary pressure with the traditional model gives
negative values. Quandalle and Sabathier model gives also positive pseudo
capillary pressure, but does not consider variation of saturation (Eq. D.11).
Adjusting a polynomial equation in Excel using pseudo capillary pressure
vs. dimensionless oil saturation without considering the zone of the “peak” gives
a smooth curve of pseudo capillary pressure. Substituting the smoothed pseudo
capillary pressure back in Eq. D.18 gives a smoothed dimensionless pseudo oil
relative permeability as shown in Fig. 5.13. Figure 5.14 shows the smoothed
dimensionless pseudo-capillary pressure.

94
Figure 4.22 shows the transfer function vs. time obtained for different
dimensionless capillary pressure curves (different sepc ' ) obtained with the
gridded system. There are clearly defined early and late time periods of flow with
a transition between them. At long times in Fig. 4.22, there is an exponential
declination in the transfer function. This kind of tendency was matched for
different capillary curves (different sepc ' ).
exp)( −= DoD tCτ (5.100)
Figure 5.15 shows the coefficients ( C ) for each capillary pressure and
Fig. 5.16 shows the exponents for each capillary pressure. Figure 5.17 shows a
graph of average dimensionless saturation vs. time for the gridded matrix. At the
beginning there is a linear tendency in saturation then a transition zone and finally
a well-defined behavior due to capillarity. This graph shows the capillary effect
and the transition period. Thus, the bottom curve corresponds to the analytical
solution due to zero capillary pressure. Figure 5.18 shows the beginning of the
late flow period considering the straight lines for each dimensionless capillary
pressure matched.
From the previous analysis and the two dual porosity models, Fig. 5.19
shows the pseudo-capillary pressure obtained with the Eclipse dual porosity

95
model. Figure 5.20 shows the pseudo-capillary pressure obtained with the Bech et
al. model.
5.6.1 Procedure
From the previous analysis there are two general situations to obtain the
dimensionless pseudo oil relative permeability and the dimensionless pseudo
capillary pressure to be utilized in a simulation study: 1) with Corey type
equations and 2) with a gridded matrix block and Corey type equations. In case of
tabulated data instead of Corey type equations, Chapter 4 presents a procedure to
calculate pseudo dimensionless oil relative permeability. For field data of
capillary pressure the second procedure shown bellow is adequate to use due to
pseudo capillary pressure is obtained with a gridded matrix block.
5.6.1.1 With No Gridded Matrix Block
I. Generate the dimensionless pseudo oil relative permeability curves
with Eqs. 4.80 and 4.81. This is using the exponent ( oe ) from the
Corey type equation for oil relative permeability and identifying the
dimensionless time in Eq. 4.61. In this case for 1=oDS , oD et /1= .
Identify average dimensionless oil saturation at the time given by Eq.
4.68. For average dimensionless oil saturation greater than oDS
obtained with Eq. 4.68, dimensionless oil relative permeability is
equal to one (Eq. 4.81). For average dimensionless oil saturation less
than that obtained with Eq. 4.68 dimensionless oil relative

96
permeability is given by Eq. 4.80. For oil relative permeability given
in tabulated form follow the procedure established in section 4.3.1 of
Chapter 4.
II. With the capillary exponent ( pce ) and Fig. 5.19, get the coefficient to
be used in Eq. 5.100. Also with the capillary exponent and Fig. 5.20
get the exponent of Eq. 5.100.
III. Calculate the dimensionless transfer function vs. time with Eq.
5.100. This step considers two flow periods. At early flow,
dimensionless transfer function is equal to one. The time of
beginning of declination for late flow period is given in Figure 5.22.
Late flow response is calculated with Eq. 5.100.
IV. With dimensionless pseudo relative permeability of oil and
dimensionless transfer function calculated in the previous steps
obtain the dimensionless capillary pressure with the Eclipse dual
porosity equation given in dimensionless units in Appendix D (Eq.
D.3) and in non-dimensionless units by Eq. 5.16. To use the Bech et
al. model, calculations are done in dimensionless units with Eq. D.18
(Appendix D) and in non-dimensionless units by Eq. 5.96.
5.6.1.2 With Gridded Matrix Block Solution
I. Obtain pseudo oil relative permeability as established in the first step
of the previous procedure.

97
II. Using the Bech et al. model (Eq. D.18) generate pseudo capillary
pressure using: 1) pseudo oil relative permeability with Eqs. 4.80
and 4.81 and 2) the dimensionless transfer function resulting from
the gridded matrix. The Bech et al. model is recommended due to
the resulting values of dimensionless pseudo capillary pressure are
positive. The Eclipse model gives negative values.
III. With the pseudo dimensionless capillary pressure vs. dimensionless
oil saturation obtained from the previous step adjust a polynomial
equation without considering the zone of the “peak,” which results
from the analytical pseudo dimensionless oil relative permeability.
This polynomial equation will be useful in the zone of the “peak.”
IV. With the new smoothed pseudo dimensionless capillary pressure and
Eq. D.18 obtain a smoothed pseudo dimensionless oil relative
permeability.
In summary, this chapter reviews different dual porosity gravity drainage
models. Neglecting the gas viscous term from the gas equation (since gas
viscosity is usually very small compared with oil viscosity), each dual porosity
model is represented by an integral equation that can be solved numerically.
Additionally, using an analytical pseudo oil relative permeability curve (Chapter
4), oil flux from a gridded matrix block, and the dual porosity models, the Beck et
al. (1991) model better represents pseudo capillary pressure than the Eclipse and
Quandalle and Sabathier (1989) models. Finally in this chapter, a procedure is

98
shown to determine pseudo capillary pressure to be used in dual porosity models.
These pseudos were obtained using fine grid simulation in a matrix block. When
no results are available from a gridded matrix block, exponential transfer flow
equations can be used in the late flow period with gravity drainage.

99
Table 5.1: Geometry, porosity, and permeability utilized in Eclipse four-cell model to determine oil transfer from matrix to fracture with gravity drainage.
Matrix FractureDX, cm 15 15DY, cm 15 15DZ, cm 300 300Porosity, fraction 0.06 0.06Permeability in x, md 0.2 5000Permeability in y, md 0.2 5000Permeability in z, md 0.2 5000Top depth, m 1200.0 1200*Shape factor, cm-2 1.11E-05
*top of cell 1 only (matrix and fracture)
DescriptionBlock

100
Figure 5.1: Eclipse dual porosity model indicating fractional volume of gas and fractional volume of oil at two different times.
Figure 5.2: Model utilized in Eclipse to test dual porosity models.
t=0
Fracture
Matrix
0
1
Hgf=1
Hgm=0
0 1SaturationSor 1-Swi
So
Fracture
Matrix
t>0
Hgf=1
Hgm
So
Sg
1-SwiSor0 1Saturation
t=0
Fracture
Matrix
0
1
Hgf=1
Hgm=0
0 1SaturationSor 1-Swi
So
t=0
Fracture
Matrix
0
1
Hgf=1
Hgm=0
0 1SaturationSor 1-Swi
So
Fracture
Matrix
t>0
Hgf=1
Hgm
So
Sg
1-SwiSor0 1Saturation
Fracture
Matrix
t>0
Hgf=1
Hgm
So
Sg
1-SwiSor0 1Saturation
Matrix
Matrix
Fracture
Fracture
Matrix
Matrix
Fracture
Fracture

101
Figure 5.3: Average oil saturation vs. time for the dual porosity model and integral equation solution from Eclipse model.
Figure 5.4: Transfer function for Eclipse dual porosity model and integral equation solution.
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Dual porosity model (Eclipse)
Integral equation (Eclipse model)
0.65
0.70
0.75
0.80
0.85
0.90
0 1000 2000 3000 4000 5000 6000Time, days
Aver
age
Oil
Satu
ratio
n
Dual porosity model (Eclipse)Integral equation (Eclipse model)

102
Figure 5.5: Schematic of Quandalle and Sabathier (1989) matrix-fracture model.
x+
y-
y+
Z-
Z+
x- x+
y-
y+
Z-
Z+
x-

103
Figure 5.6: Oil saturation vs. time for Quandalle and Sabathier (1989) dual porosity model and its integral equation solution.
Figure 5.7: Transfer function for Quandalle and Sabathier (1989) dual porosity model and its integral equation solution.
0.70
0.72
0.74
0.76
0.78
0.80
0.82
0.84
0.86
0 1000 2000 3000 4000 5000 6000Time, days
Aver
age
Oil
Satu
ratio
n
Dual porosity model from Quandalle and Sabathier(from Eclipse simulator)
Integral equation solution from Quandalle andSabathier
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Dual porosity model from Quandalle and Sabathier(from Eclipse simulator)
Integral equation solution from Quandalle andSabathier

104
Figure 5.8: Bech et al. model (1991) for gas-oil systems with gravity segregation.
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Bech et al. dual porosity model with no gas mobility term(Integral solution)
Bech et al. dual porosity model including gas mobility term,eg=2 (Integral solution)
Figure 5.9: Results of Bech et al. model with and without the gas mobility term in the integral solution. In the gas relative permeability the exponent in the Corey type equation is 2=ge .
matrix
pomI, pgmI, Pcm
pomB
fracture
fracture ∆z
∆zgm
∆zom
∆zgf
∆zof
pofB
pgmT pofT
matrix
pomI, pgmI, Pcm
pomB
fracture
fracture ∆z
∆zgm
∆zom
∆zgf
∆zof
pofB
pgmT pofT

105
Figure 5.10: Transfer function from matrix to fracture with gridded matrix block (vertical drainage equation), Eclipse, Quandalle and Sabathier, and Bech et al. dual porosity models.
Figure 5.11: Variation of dimensionless capillary pressure and relative permeability of oil with respect to oil saturation.
0.0
0.2
0.4
0.6
0.8
1.0
0 0.2 0.4 0.6 0.8 1Dimensionless Oil Saturation
Dim
ensi
onle
ss O
il S
atur
atio
n, C
apill
ary
Pre
ssur
e, a
nd O
il R
elat
ive
Per
mea
bilit
y Dimensionless oil relative permeability
Dimensionless capillary pressure
Dimensionless oil saturation
Intersection of dimensionless oil saturation and capillary pressure
1E-09
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Matrix block gridded (Vertical drainage equation)
Eclipse dual porosity model
Bech et al. dual porosity model with no gas mobility term (Integralsolution) and Quandalle and Sabathier model

106
Figure 5.12: Pseudo capillary pressure from Bech et al. model, Quandalle and Sabathier model, and Eclipse model obtained with a) transfer function of the gridded matrix block (vertical drainage equation) and b) the analytical pseudo oil relative permeability.
-0.4
0.0
0.4
0.0 0.2 0.4 0.6 0.8 1.0Dimensionless Oil Saturation
Dim
ensi
onle
ss C
apill
ary
and
Pse
udo
Cap
illar
y P
ress
ure
Capillary Pressure (epc=6)
Bech et al. model
Quandalle and Sabathier Model
Eclipse dual porosity model

107
Figure 5.13: Analytical and smoothed pseudo oil relative permeability.
Figure 5.14: Smoothed pseudo capillary pressure from Bech et al. model, Eclipse model, and Quandalle and Sabathier model obtained with a) transfer function of the gridded matrix block (vertical gravity drainage) and b) the analytical pseudo oil relative permeability.
0.0
0.2
0.4
0.6
0.8
1.0
0 0.2 0.4 0.6 0.8 1Dim ensionless O il Saturation
Dim
ensi
onle
ss P
seud
o O
il R
elat
ive
Perm
eabi
lityl
Analytical
Sm oothed
-0.4
0.0
0.4
0.0 0.2 0.4 0.6 0.8 1.0Dimensionless Oil Saturation
Dim
ensi
onle
ss P
seud
o C
apill
ary
Pre
ssur
e Capillary Pressure (epc=6)
Bech et al. model
Quandalle and Sabathier Smoothed
Eclipse dual porosity model

108
Figure 5.15: Coefficients for the power Equation 5.100 for different capillary pressure curves.
Figure 5.16: Exponents for the power Equation 5.100 for different capillary pressure curves.
0.1144
0.1378
0.1475
0.1543
0.16130.1649
0.1
0.11
0.12
0.13
0.14
0.15
0.16
0.17
0 1 2 3 4 5 6 7Capillary E xponent
Pow
er F
unct
ion
Coe
ffici
ents
1.6199
1.5647 1.561
1.7657
1.55211.5479
1.5
1.6
1.6
1.7
1.7
1.8
1.8
0 1 2 3 4 5 6 7Capillary Exponent
Pow
er F
unct
ion
Exp
onen
t

109
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3 4Dimensionless Time
Ave
rage
Dim
ensi
onle
ss O
il S
atur
atio
nNo capillary pressure
Capillary Pressure with epc=6
Capillary Pressure with epc=2
Figure 5.17: Average dimensionless oil saturation vs. time obtained from the gridded matrix block (vertical drainage equation).
Figure 5.18: Dimensionless time for the beginning of declination in transfer function.
0.315
0.309
0.299
0.2940.2940.293
0.290
0.295
0.300
0.305
0.310
0.315
0.320
0 1 2 3 4 5 6 7Capillary Exponent
Dim
ensi
onle
ss T
ime
of D
eclin
atio
n in
Tra
nsfe
r Fu
nctio
n

110
Figure 5.19: Different dimensionless pseudo capillary pressure with Eclipse dual porosity model obtained with a) analytical pseudo oil relative permeability and b) exponential transfer function declination with Eq. 5.100.
Figure 5.20: Different dimensionless pseudo capillary pressure with Bech et al. dual porosity model obtained with a) analytical pseudo oil relative permeability and b) exponential transfer function declination with Eq. 5.100.
-0.05
0.00
0.05
0.10
0.15
0.20
0.0 0.2 0.4 0.6 0.8 1.0Dimensionless Oil Saturation
Dim
ensi
onle
ss P
seud
o C
apilla
ry P
ress
ure
Capillary Exponent epc=6
Capillary Exponent epc=4
Capillary Exponent epc=2
-0.40
-0.35
-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Dimensionless Oil Saturation
Dim
ensi
onle
ss P
seud
o C
apill
ary
Pre
ssur
e
CapillaryExponentepc=6
CapillaryExponentepc=4
CapillaryExponentepc=2
-0.40
-0.35
-0.30
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Dimensionless Oil Saturation
Dim
ensi
onle
ss P
seud
o C
apill
ary
Pre
ssur
e
CapillaryExponentepc=6
CapillaryExponentepc=4
CapillaryExponentepc=2

111
Chapter 6 Flow in Lateral and Vertical Directions
Chapters 4 and 5 deal with gravity drainage considering flow in the
vertical direction with the lateral sides of the matrix being closed to flow. This
chapter reviews the effect of flow with gravity drainage in 3D in a matrix block.
Additionally, the chapter discusses 3D flow considering a partially opened bottom
fracture in a matrix block, and 3D flow from a stack of three matrix blocks.
6.1 LATERAL-VERTICAL FLOW
To evaluate flow in vertical and lateral directions simultaneously, Fig. 6.1
shows the matrix-fracture model. This model is a quarter of a matrix block with
fractures at top, bottom, and two lateral fractures in x and y directions. The data
utilized in the runs is given in Table 6.1. In this case the porosity in the fracture
was given a small value in order to drain at short times a small oil volume from
fractures. Comparing simulations with different porosity values in fracture, the
only difference is at early times of simulation due to the fact that fractures with
high porosity drains more oil than fractures with low porosity.
With no capillary pressure, transfer function and cumulative oil of
combined lateral and vertical flow compared with vertical flow is shown in Figs.
6.2 and 6.3, respectively. This transfer function was simulated with the vertical
drainage model (Eq. 4.33) and Eclipse (lateral-vertical directions). From a
practical point of view, both results are the same.
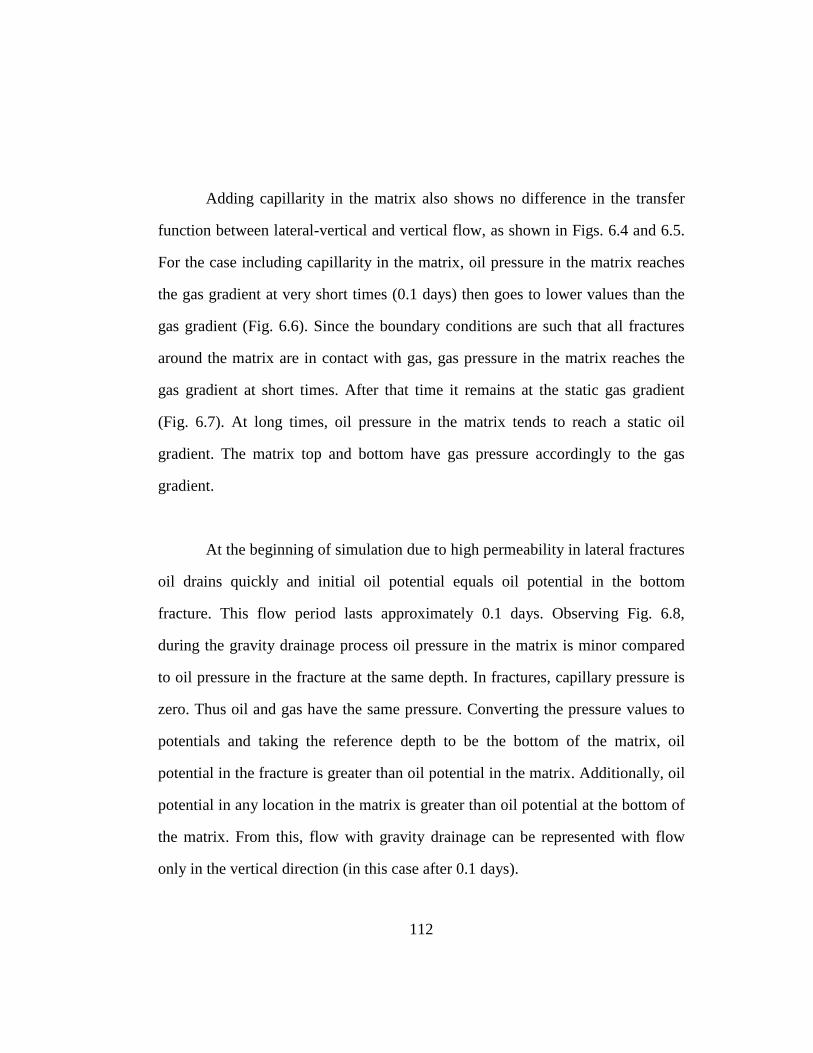
112
Adding capillarity in the matrix also shows no difference in the transfer
function between lateral-vertical and vertical flow, as shown in Figs. 6.4 and 6.5.
For the case including capillarity in the matrix, oil pressure in the matrix reaches
the gas gradient at very short times (0.1 days) then goes to lower values than the
gas gradient (Fig. 6.6). Since the boundary conditions are such that all fractures
around the matrix are in contact with gas, gas pressure in the matrix reaches the
gas gradient at short times. After that time it remains at the static gas gradient
(Fig. 6.7). At long times, oil pressure in the matrix tends to reach a static oil
gradient. The matrix top and bottom have gas pressure accordingly to the gas
gradient.
At the beginning of simulation due to high permeability in lateral fractures
oil drains quickly and initial oil potential equals oil potential in the bottom
fracture. This flow period lasts approximately 0.1 days. Observing Fig. 6.8,
during the gravity drainage process oil pressure in the matrix is minor compared
to oil pressure in the fracture at the same depth. In fractures, capillary pressure is
zero. Thus oil and gas have the same pressure. Converting the pressure values to
potentials and taking the reference depth to be the bottom of the matrix, oil
potential in the fracture is greater than oil potential in the matrix. Additionally, oil
potential in any location in the matrix is greater than oil potential at the bottom of
the matrix. From this, flow with gravity drainage can be represented with flow
only in the vertical direction (in this case after 0.1 days).

113
With no capillary pressure in the matrix, oil pressure in the matrix reaches
the gas gradient at short times. After that time oil pressure does not decrease to
reach a static oil gradient as in the capillary case (Fig. 6.9). This is because there
is no oil saturation in the matrix caused by capillarity. The case with no capillary
pressure is an ideal case in a porous media. In fact oil residual saturation is
consequence of capillary forces in the matrix. With no capillary pressure, the
saturation gradient with respect to depth in the matrix is only due to desaturation
controlled by oil relative permeability. In the case that includes capillary pressure
in the matrix, oil saturation at long times tends to reach the static behavior of oil
saturation given by the capillary pressure curve. In the case of no capillarity in the
matrix at long times oil saturation approaches residual oil saturation. (Figs. 6.10
and 6.11).
Additionally, for the case including capillarity in the matrix, oil pressure
remains practically the same at the center and at the edge of the matrix. Figure
6.12 shows oil pressure for cells at the lateral face and at the center of the matrix.
Both pressures tend to the same values at short times, approximately in one day.
Figure 6.12 shows a “peak” in the pressure curve for the cell located in the center
of the matrix block, which must be a numerical error and can be corroborated by
grid refinement since there is no physical evidence to generate that abnormality.

114
6.1.1 Oil Injection at Top of the Matrix and Constant Gas Pressure in Lateral Fractures
In the previous observations flow with gravity drainage has preference for
vertical flow. This section discusses lateral oil flow from matrix to fracture with
gas present only in lateral fractures (no gas at top of the matrix). Oil was injected
at top of the matrix block and lateral fractures kept at constant gas pressure. The
model used is the same as Fig. 6.1. Simulation indicates that oil flow from matrix
to lateral fractures last short times due to oil is injected at the top of the matrix at
the same original pressure (80 atm) and oil draining at the bottom of the matrix
has a drop of pressure from original conditions to gas pressure. Figure 6.13
indicates cumulative oil from horizontal layers of the matrix to a lateral fracture.
The almost horizontal curve representing cumulative oil indicates that oil
production from matrix to fracture is negligible.
Additionally, during the flowing some gas saturated the matrix from
lateral fractures (Fig. 6.14) due to the bottom fracture drains oil faster than oil
enters at the matrix top. That caused by the drop of pressure in the bottom fracture
from original conditions to gas gradient and pressure at the matrix top is the
original matrix pressure. Oil saturation in the matrix decreased gradually from
0.85 to 0.77 and remained constant at this last value mainly in the upper part of
the matrix during the drainage (Fig. 6.16). The decrease in oil saturation first
appeared in the upper part of the matrix and gradually decreased toward the
bottom of the matrix. From the above observations, oil flow has preference for the
bottom of the matrix.

115
6.1.2 Flow in Partially Open Bottom Fracture
This section discusses runs with the matrix block allowed to flow not only
in the lateral direction, but also to partial opening in the bottom of the matrix.
This is to quantify the interaction between lateral and vertical flow with gravity
drainage. The model is the same as indicated in Fig. 6.1.
To simulate transfer with only a portion of the bottom matrix allowed to
flow Fig. 6.15 shows sections of the bottom fracture cells allowing flow out of the
matrix in the vertical direction (rows of cells). The first run has 19% of bottom
matrix opened to flow that corresponds to flow from first row of cells adjacent to
lateral fractures as indicated in Fig. 6.15. The second run has 36% of bottom
matrix opened to flow that is flow from first and second rows. There were 9
different runs with different sections opened to flow. Each run included
additionally flow to lateral fractures.
Oil production rate from the matrix block to bottom fracture for each run
is shown in Fig. 6.16. This figure indicates that more than 75% of bottom matrix
opened to flow (five rows of cells opened to flow), oil production rate is very
close to total bottom opening in the bottom of matrix block.
Total oil production (bottom of the matrix block plus lateral fracture flow)
is indicated in Fig. 6.17. Regardless, flow from matrix to bottom fracture is

116
different with different portions of bottom of the matrix opened to flow, but total
flow is the same as if total bottom matrix is opened to flow. If flow is restricted in
the bottom of the matrix block flow goes in the lateral direction near the bottom
of the matrix.
6.2 FLOW FROM A STACK OF MATRIX BLOCKS
This section discusses gravity drainage in a stack of matrix blocks. Figure
6.18 shows a quarter of a stack of three matrix blocks separated by fractures of
0.1 mm aperture. Flow is allowed to the bottom fracture. Lateral fractures are also
open to flow.
For simulation purposes, each matrix block is divided by 10x10x20 cells
in x , y , and z directions, respectively. The total grid is 11x11x64 cells in x , y ,
and z directions, respectively, which includes lateral fractures.
Figure 6.19 shows oil rate that goes from each matrix block to its adjacent
bottom fracture. Initially, all matrix blocks have the same oil rate going to its
adjacent bottom fracture then the upper matrix block starts declination in its oil
rate. The middle matrix block is the second in declination of its oil rate.
Re-infiltration of oil occurs from the upper matrix block to the middle
matrix block and from the middle matrix block to the bottom matrix block. Re-
infiltration takes place trough horizontal fractures that divide the matrix blocks.

117
Figure 6.20 shows cumulative oil from the top matrix block to its adjacent bottom
fracture (thicker curve). This cumulative oil is the same for the top fracture of
middle matrix block to middle matrix block. This means “all” oil goes from top
matrix block to the middle matrix block. The same happens from the middle
matrix block to the bottom matrix block, as indicated by Fig. 6.19.
Figure. 6.21 shows oil production rate from the matrix blocks to one of the
lateral fractures. The bottom matrix block contributes more oil to lateral fractures
than others, but this contribution of approximately 10-6 bbl/d is very small
(approximately 0.2 percent) compared with oil contribution to bottom fracture, as
indicated by Fig. 6.19 (5x10-4 bbl/d). This contribution may be considered as a
negligibly value in gravity drainage.
Cumulative oil from horizontal fractures to one lateral fracture is indicated
in Fig. 6.22. The fracture between middle matrix block and bottom matrix block
gives more cumulative oil than others. The bottom fracture receives oil from
lateral fractures at short times as shown by the negative values in Fig. 6.22. Figure
6.23 shows cumulative oil production from matrix to a lateral fracture.
Cumulative oil values are greater from matrix to lateral fractures than from
horizontal fractures to lateral fractures. This means that matrix blocks instead of
horizontal fractures contribute more oil to lateral fractures.
118
Oil pressure in the matrix blocks reaches gas gradient at very short times
(Fig. 6.24). This figure also shows that oil pressure in the matrix tends to reach
static oil gradient at long times with oil pressure equal to gas pressure in the
horizontal fractures. Figure 6.25 shows capillary pressure profiles at different
times. At infinite time of simulation, these profiles tend to reach a straight line
with slope
∆
cggρ/1 . Oil saturation in the matrix blocks tends to reach the static
saturation given by the capillary pressure curve at long times. Figure 6.26 shows
oil saturation in the matrix blocks and static oil saturation given by the capillary
pressure curve in matrix blocks.
In conclusion, from 3D flow with gravity drainage in a matrix block,
lateral flow is negligible with and without capillary pressure. In a matrix block
with gravity drainage, opening 75% or more the bottom fracture of a matrix block
flow is similar to totally opening the bottom fracture. If flow is restricted in the
bottom fracture of a matrix block, flow goes to lateral fractures. With stacked
matrix blocks, reinfiltration from upper to lower blocks dominates gravity
drainage.

119
Table 6.1: Matrix and fracture characteristics for evaluation of lateral-vertical flow.
Matrix
xL , cm 150
yL , cm 150
zL , cm 300
Porosity, fraction 0.06
Permeability, md 0.2
Number of cells in x direction 10
Number of cells in y direction 10
Number of cells in z direction 20
Fracture
Fracture aperture, cm 0.1
Cells representing width of fracture 1
Permeability, md 5000
Porosity, fraction 0.06

120
Figure 6.1: One quarter of matrix-fracture representing flow in lateral and vertical directions.
Flow
Flow
Flow
No Flow
No Flow
Gas at constant pressure
Fractu
re
Matrix
Fracture
No fracture
z
xy
a) 3D view b) Side view
Gas at constant pressure
Fracture
Fracture
Matrix
Flow
Flow
Flow
No Flow
No Flow
Gas at constant pressure
Fractu
re
Matrix
Fracture
No fracture
z
xy
z
xy
a) 3D view b) Side view
Gas at constant pressure
Fracture
Fracture
Matrix

121
Figure 6.2: Transfer function vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) with no capillary pressure.
Figure 6.3: Cumulative oil production vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) with no capillary pressure.
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Vertical flow (Vertical drainage equation)
3D flow (Eclipse)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0 1000 2000 3000 4000 5000 6000 7000Time, days
Cum
ulat
ive
Oil
Prod
uctio
n, b
bl
Vertical flow (Vertical drainage equation)
3D flow (Eclipse)

122
Figure 6.4: Transfer function vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) including capillary pressure.
Figure 6.5: Cumulative oil production vs. time for flow in x, y, and z directions (Eclipse) and flow in vertical direction (vertical drainage equation) including capillary pressure.
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/D
/ft3
Flow in vertical direction (Vertical drainage equation)
3D flow (Eclipse)
0
0.1
0.2
0.3
0.4
0.5
0.6
0 1000 2000 3000 4000 5000 6000 7000Time, days
Cum
ulat
ive
Oil
Pro
duct
ion,
bbl
Flow in vertical direction (Vertical drainage equation)
3D flow (Eclipse)

123
Figure 6.6: Oil pressure at different times in the matrix 3D flow (Eclipse) including capillarity.
Figure 6.7: Gas pressure at different times in the matrix 3D flow (Eclipse) including capillarity.
0
50
100
150
200
250
30079.75 79.85 79.95 80.05 80.15 80.25
Oil Pressure, atm
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days of simulation(Initial oil gradient)
0.1 Days of simulationand gas gradient
1826 Days of simulation
10765 Days ofsimulation
Infinite time of flow (Oilgradient)
0
50
100
150
200
250
30079.9 80 80.1 80.2 80.3
Gas Pressure, atm
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days of simulation (Initial oil gradient)
0.01 Days of simulation
0.10 Days of simulation

124
Figure 6.8: Oil pressure for any location in the matrix block (considering as reference depth the matrix bottom, values indicated with arrows are oil potentials).
Figure 6.9: Oil pressure at different times in days for the gridded matrix (Eclipse) with no capillarity.
0
50
100
150
200
250
30079.95 80 80.05 80.1 80.15 80.2 80.25
Oil Pressure, atm
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days (Initial oil gradient)
0.01 Days of simulation
0.1 Days of simulation, gas gradient, andinfinite time of simulation
0
50
100
150
200
250
30079.75 79.85 79.95 80.05 80.15 80.25
Oil Pressure, atm
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days ofsimulation(Initial oilgradient)
0.1 Days ofsimulation andgas gradient
5122 Days ofsimulation
Infinite time offlow (Oilgradient)
Φof
Φom
Φom,bottom
pom pof
Φo,initial

125
Figure 6.10: Oil saturation at different times for the gridded matrix block (Eclipse) including capillarity.
Figure 6.11: Oil saturation at different times in the matrix with 3D flow (Eclipse) with no capillarity.
0
50
100
150
200
250
3000.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9
Oil Saturation
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days ofsimulation
736 Days ofsimulation
1826 Days ofsimulation
10765 Days ofsimulation
Infinite time offlow (Static)
0
50
100
150
200
250
3000.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9
Oil Saturation
Dep
th fr
om T
op o
f Mat
rix, c
m
0.00 Days ofsimulation
736 Days ofsimulation
1826 Days ofsimulation
31181 Days ofsimulation

126
Figure 6.12: Oil pressure vs. time at the edge and at the center of the matrix block with 3D flow (Eclipse).
Figure 6.13: Cumulative oil production from matrix layers to a lateral fracture at different depths (cells) with oil injection at matrix top and keeping gas at constant pressure in lateral fractures (3D flow).
79.92
79.94
79.96
79.98
80.00
80.02
80.04
80.06
80.08
80.10
80.12
1E-02 1E-01 1E+00 1E+01 1E+02 1E+03 1E+04 1E+05 1E+06Time, days
Oil
Pre
ssur
e, a
tm
Cell in the matrix block center
Cell in the matrix block face
1E-03
1E-02
1E-01
1E+00
1E+01 1E+02 1E+03 1E+04Time, days
Cum
mul
ativ
e O
il Pr
oduc
tion,
cc
Layer 2 of matrix to lateral fracture (Top of matrix)Layer 8 of matrix to lateral fractureLayer 14 of matrix to lateral fractureLayer 20 of matrix to lateral fractureLayer 21 of matrix to lateral fracture (Matrix bottom)

127
Figure 6.14: Oil saturation vs. depth for different times for 3D flow injecting oil at top of matrix keeping gas at constant pressure in lateral fractures.
Figure 6.15: Bottom view of one quarter of matrix with fracture showing the cells opened to vertical flow to test partial flow at the bottom of matrix block.
0
50
100
150
200
250
3000.7 0.75 0.8 0.85 0.9
Oil Saturation
Dep
th fr
om T
op o
f Mat
rix, c
m
0 Days (Initialconditions)93.9 Days
402.4 Days
831.4 Days
983.4 Days
5555.4 Days
FractureFirst row of cells
Second row of cells
Third row of cells
Third
row
of c
ells
Seco
nd ro
w o
f cel
ls
Firs
t row
of c
ells
Frac
ture
MATRIX
FractureFirst row of cells
Second row of cells
Third row of cells
Third
row
of c
ells
Seco
nd ro
w o
f cel
ls
Firs
t row
of c
ells
Frac
ture
MATRIX

128
Figure 6.16: Oil production rate from matrix to bottom fracture with different rows of cells allowed to flow to bottom fracture (quarter of matrix block).
Figure 6.17: Transfer function from matrix to fractures (lateral and bottom) with partial flow at the bottom of the matrix block (using different rows of cells).
1.E-06
1.E-05
1.E-04
1.E-03
10 100 1000 10000Time, days
Oil
Prod
uctio
n R
ate,
bbl
/d
19 % of bottom matrix block opened to flow (One row of cells)
64 % of bottom matrix block opened to flow (4 rows of cells)
75 % of bottom matrix block opened to flow (5 rows of cells)
100 % of bottom matrix block opened to flow (All rows of cells)
1.E-08
1.E-07
1.E-06
1.E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
36% of bottommatrix blockopened to flow(2 rows of cells)
100% of bottommatrix blockopened to flow(All rows ofcells)

129
Figure 6.18: One quarter of a stack of three matrix blocks divided by fractures with gas at constant pressure at top.
Gas at constant pressure
Production
Flow
No flow
No flow
No flow
Flow
Flow
Flow
Flow
Flow
No flow
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
Fracturez
x
y
Gas at constant pressure
a) 3D view a) Side view
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
FractureFractureProduction
Gas at constant pressure
Production
Flow
No flow
No flow
No flow
Flow
Flow
Flow
Flow
Flow
No flow
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
Fracturez
x
y
z
x
y
Gas at constant pressure
a) 3D view a) Side view
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
FractureFractureProduction

130
Figure 6.19: Oil production rate vs. time for each quarter of matrix block to its adjacent bottom fracture for a stack of three matrix blocks separated by fractures including lateral fractures.
Figure 6.20: Cumulative oil production vs. time for each quarter matrix block to its adjacent lower fracture and from that fracture to the lower matrix for a stack of a quarter of three matrix blocks separated by fractures including lateral fractures.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 1000 2000 3000 4000 5000 6000 7000Time, days
Cum
mul
ativ
e O
il P
rodu
ctio
n, b
bl
Top matrix block-Adjacent bottom fracture-Middle matrix block
Middle matrix block-Adjacent bottom fracture-Bottom matrix block
Bottom matrix block-Adjacent bottom fracture
1.E-06
1.E-05
1.E-04
1.E-03
10 100 1000 10000Time, days
Oil
Prod
uctio
n R
ate,
bbl
/d
Top quarter matrix block to its adjacent bottom fracture
Middle quarter matrix block to its adjacent bottom fracture
Bottom quarter matrix block to its adjacent bottom fracture
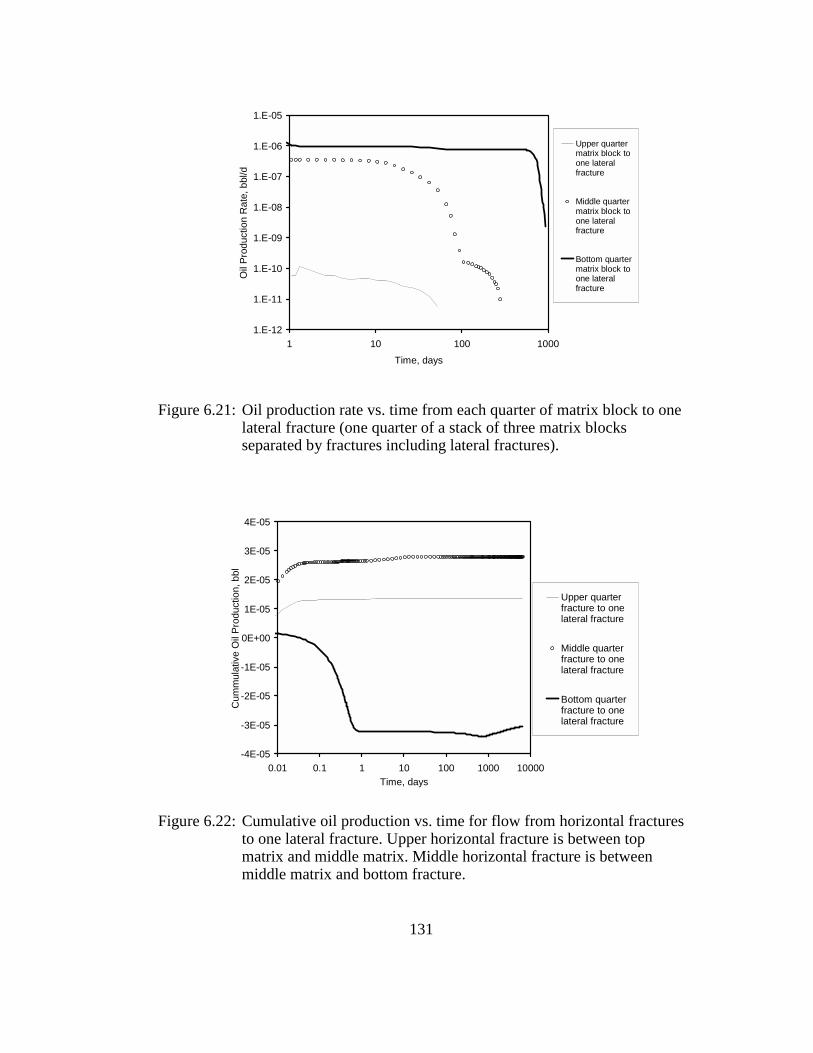
131
Figure 6.21: Oil production rate vs. time from each quarter of matrix block to one lateral fracture (one quarter of a stack of three matrix blocks separated by fractures including lateral fractures).
Figure 6.22: Cumulative oil production vs. time for flow from horizontal fractures to one lateral fracture. Upper horizontal fracture is between top matrix and middle matrix. Middle horizontal fracture is between middle matrix and bottom fracture.
1.E-12
1.E-11
1.E-10
1.E-09
1.E-08
1.E-07
1.E-06
1.E-05
1 10 100 1000
Time, days
Oil
Prod
uctio
n R
ate,
bbl
/d
Upper quartermatrix block toone lateralfracture
Middle quartermatrix block toone lateralfracture
Bottom quartermatrix block toone lateralfracture
-4E-05
-3E-05
-2E-05
-1E-05
0E+00
1E-05
2E-05
3E-05
4E-05
0.01 0.1 1 10 100 1000 10000Time, days
Cum
mul
ativ
e O
il Pr
oduc
tion,
bbl
Upper quarterfracture to onelateral fracture
Middle quarterfracture to onelateral fracture
Bottom quarterfracture to onelateral fracture

132
Figure 6.23: Cumulative oil production vs. time for flow from matrix blocks to one lateral fracture (a quarter of a stack of three matrix blocks divided by fractures with lateral fractures).
Figure 6.24: Oil pressure in the matrix (cell adjacent to fracture) for a stack of a quarter of three matrix blocks divided by fractures (including lateral fractures).
0
100
200
300
400
500
600
700
800
90079 79.5 80 80.5 81
Oil Pressure, atm
Dep
th fr
om T
op o
f Upp
er M
atrix
, cm 0.000 Days (Initial
conditions)
0.105 Days and gasgradient
28247 Days
139515 Days
Oil Gradient
0E+00
1E-04
2E-04
3E-04
4E-04
5E-04
6E-04
7E-04
0.01 0.1 1 10 100 1000 10000Time, days
Cum
mul
ativ
e O
il P
rodu
ctio
n, b
bl
Upper quarter matrixblock to one lateralfracture
Middle quarter matrixblock to one lateralfracture
Bottom quartermatrix to one lateralfracture

133
Figure 6.25: Capillary pressure profiles at different times for a quarter of a stack of three matrix blocks with gravity drainage.
Figure 6.26: Oil saturation in the matrix (cell adjacent to the fracture) for a quarter of a stack of three matrix blocks separated by fractures (including lateral fractures).
0
100
200
300
400
500
600
700
800
9000.5 0.6 0.7 0.8 0.9
Oil Saturation
Dep
th fr
om T
op o
f Upp
er M
atrix
, cm 0.00 Days
(Initialconditions)776 Days
1872 Days
28247 Days
Static saturation(Infinite flowtime)
0
100
200
300
400
500
600
700
800
9000 0.05 0.1 0.15 0.2
Capillary Pressure, atm
Dep
th fr
om T
op o
f Upp
er M
atrix
, cm
0.00 Days (Initialconditions)
764 Days
1856 Days
10348 Days
139515 Days
Static

134
Chapter 7 Fine Grid and Dual Porosity Simulation
The previous chapter corroborates that in 3D flow with gravity drainage,
lateral flow is negligible with and without capillarity. This chapter analyzes a
stack of matrix blocks simulated with a fine grid in the x, y, and z directions,
comparing the results with those obtained from a dual porosity model using
pseudo oil relative permeability and pseudo capillary pressure functions as
established in Chapters 4 and 5. Additionally, flow from the stack of matrix
blocks is compared with flow obtained from an equivalent matrix block the same
size of the stack of matrix blocks. Finally, a lab experimental case considering a
stack of three matrix blocks is simulated in 1D vertical direction.
7.1 STACK OF FIVE MATRIX BLOCKS
Figure 7.1 shows a stack of five matrix blocks separated by fractures. In
the case of fine grid simulation the total system was divided in 20x20x106 cells in
x, y and z directions respectively. Lateral fractures were not considered due to
lateral flow being negligible with gravity segregation. The flow is in 1D in the
vertical direction. The simulation grid considers each horizontal fracture as a layer
dividing matrix blocks. At the top of the stack of matrix blocks was placed a
fracture with injector wells simulating gas at constant pressure. At the bottom of
the stack of matrix blocks were placed producer wells simulating oil production
with gravity drainage from the stack of matrix blocks at constant pressure. Table
7.1 shows data for the fine and dual porosity grids.

135
Wells simulating gas injection at top of the stack of matrix blocks were
placed in the top fracture of the stack and wells simulating oil production by
gravity drainage were placed in the bottom fracture of the stack. To reduce the
number of wells during simulation Fig. 7.2 shows variation of cumulative oil for a
matrix block with different number of wells at the bottom of the matrix block.
This figure shows that it is not necessary to use the total number of wells in the
bottom fracture to simulate gravity drainage due to the high permeability in the
fracture. In this case 20 distributed wells were used as injectors at the top fracture
and 20 distributed wells were used as producers at the bottom fracture.
Cumulative oil from the top matrix block, middle matrix block, and
bottom matrix block to their adjacent bottom fracture is shown in Fig. 7.3. The
deeper the matrix block, the more cumulative oil to its adjacent bottom fracture.
This is due to reinfiltration of oil from upper to lower matrix block through the
fracture separating both matrix blocks. The curve showing cumulative oil from
the top matrix block to its adjacent bottom fracture is four times as that presented
in Fig. 6.5, which was simulated with a quarter of a matrix-fracture block.
At the beginning of the cumulative oil (Fig. 7.3) there is a straight line
with slope 2.13x10-3 bbl/d. This rate corresponds to a matrix block with gravity
segregation completely saturated with oil and with potential,

136
zgg
c
∆∆=∆Φ ρ (7.1)
Substituting Eq. 7.1 into the Darcy equation,
co
roo g
gAkkq ρµ
∆= (7.2)
Barkve and Firoozabadin (1992) also shows Eq. 7.2. Substituting values from
Table 4.1 into Eq. 7.2 results in 16.14=oq cm3/h (2.13x10-3 bbl/d).
Figure 7.4 shows the stack of five matrix blocks for simulation with the
dual porosity model in Eclipse to compare with the gridded stack of five matrix
blocks. The first comparison run between the two systems was made using oil
relative permeability and capillary pressure as in Figs. 4.2 and 4.3, respectively.
Figure 7.5 shows oil rate for the gridded stack of matrix blocks and the dual
porosity stack of matrix blocks. At early times the oil rate given by the dual
porosity system is five times greater than the oil rate given by the gridded stack of
matrix block. This is because the dual porosity system transfers oil from all matrix
blocks to fracture since the beginning of gravity drainage and the gridded stack of
matrix blocks transfers oil from the top matrix to its adjacent lower fracture and
from that fracture to the lower matrix and so on.

137
Figure 7.6 shows oil rate from each matrix block to fracture with the dual
porosity system and the total oil rate transferred from matrix to fracture. This
shows that this dual porosity model has no oil imbibition from fracture to matrix
in the dual porosity system since the total oil rate is five times the oil rate given
by the individual matrix blocks and no oil rate goes from fracture to matrix.
Figure 7.7 shows oil rate from each matrix block to its adjacent lower fracture in
the gridded stack of five matrix blocks. This shows that contrary to the dual
porosity model, the gridded stack of matrix blocks shows “complete” oil
reinfiltration (imbibition) from upper to lower matrix. Also from Fig. 7.7, the
maximum oil rate given by Eq. 7.2 is not a function of the number of matrix
blocks stacked. Duration and declination of the maximum flow rate depends on
the number of matrix blocks stacked.
7.2 SIMULATION WITH PSEUDO FUNCTIONS
To compare results with the gridded stack of matrices and the stack of
matrices simulated with dual porosity model given in Eclipse, the pseudo oil
relative permeability presented in Chapter 4 and the pseudo capillary pressure
given in Chapter 5 are used. The pseudo saturation functions utilized are in Fig.
4.19 for the pseudo oil relative permeability, and Fig. 5.27 for the pseudo
capillary pressure.
To activate the pseudo functions in the dual porosity model in Eclipse, the
first step is to activate a gravity segregation model in Eclipse (i.e. Model 1).

138
Secondly, determine the relative permeability accordingly to the established in
Chapter 4 and detailed in Chapter 6. In the Eclipse dual porosity model,
∆∆−−=
comDcm
o
romo g
gzSPkk ρµ
στ (7.3)
and the Bech et al. model neglecting gas viscous pressure gradient,
∆∆−=
comDcm
omDo
romo g
gzSPSkk ρ
µστ (7.4)
From Eqs. 7.3 and 7.4 the oil relative permeability used in Eclipse for
using the Bech et al. model,
omD
roeclipsero S
kk =, (7.5)
Pseudo capillary pressure is determined according to procedures in
Chapter 5 and detailed in Chapter 6. Figures 7.8 and 7.9 shows the modified
pseudo oil relative permeability and pseudo capillary pressure, respectively.
Figure 7.10 shows results with the gridded system for a stack of five
matrix blocks and those obtained with the dual porosity model with pseudo
functions. The Eclipse dual porosity model produces five times greater than the
transfer function given by the gridded model. This is because the gridded stack of

139
matrix blocks reproduces reinfiltration of oil. The dual porosity model in Eclipse
does not reproduce reinfiltration (imbibition). The gridded system gives oil
production at short times accordingly to Eq. 7.2. The matrix blocks then decline
oil rate gradually (first the top matrix block then the second and so on).
7.2.1 Matrix Block with the Same Size as a Stack of Five Matrix Blocks
Figure 7.11 shows saturation profile obtained with a gridded matrix block
of the same size of the stack of five matrix blocks. Figure 7.12 shows oil
production rate for both the stack of five matrix blocks and a matrix block of the
same size of the stack of five matrix blocks. The difference between both runs
happens because the matrix block of the same size as five matrix blocks produces
more oil when gas arrives at the bottom of the matrix block. Saturation profiles
given by the gridded five matrix blocks are in Fig. 7.14. Figures 7.14 and 7.15
show oil pressure at different times for the gridded stack of five matrix blocks and
the gridded matrix block of the same size as the stack of five matrix blocks.
From Figs. 7.11 and 7.13, there is a difference in oil saturation left in the
matrix after infinite time of gravity drainage accordingly to the height of the
matrix block. Figure 7.16 shows remaining oil saturation vs. matrix size in a
matrix block after infinite time. The higher the matrix block, the less oil left in the
matrix. Equation E.10 from Appendix E was used to do the calculations. This
figure also shows the static oil saturation given by capillary pressure.

140
7.2.2 Laboratory Measurements of Gravity Drainage
There are some gravity drainage experiments, one of the most documented
is by Firoozabadi (1993) that presented gravity drainage tests on a Berea
Sandstone block 1.815 m long with a cross sectional area of 229.5 cm2. The
experiments, he conducted with normal decane (nC10) allowing flow of
atmospheric air at the top. Table 7.1 shows the information of the matrix block,
capillary pressure, and oil relative permeability. Firoozabadi sectioned the matrix
block vertically in three equal matrix blocks of 60.5 cm long each. He put the
three matrix blocks in a stack and laced dividers between them allowing fractures
of 100 mµ aperture.
For the stack of three matrix blocks, Fig. 7.17 shows oil production rate
vs. time compared with the simulation results. Figure 7.18 shows cumulative oil
production from Eclipse and the Firoozabadi lab results. 1D vertical simulation
was utilized in Eclipse.
In summary, this chapter compares results from simulating a stack of five
matrix blocks with fine grid and results of the Eclipse dual porosity model. At
early times, the Eclipse dual porosity model with pseudo functions gives five
times greater flow rate than that obtained from a gridded stack of five matrix
blocks due to the fact that reinfiltration dominates in gravity drainage and the dual
porosity models consider only flow from matrix to fracture. A maximum oil flux
with gravity drainage is obtained with Darcy’s equation using the end point oil

141
relative permeability and the density difference between oil and gas instead of the
derivative of oil potential. Duration and declination of maximum oil flux depends
on the size and number of blocks stacked. At late flow times, oil rate from a stack
of five matrix blocks gives less oil rate than that obtained from a matrix block the
same size of the stack. Finally, an acceptable match is obtained simulating 1D
vertical flow with gravity drainage and a fine grid stack of three matrix blocks of
a laboratory gravity drainage experiment by Firoozabadi (1993).

142
Table 7.1: Data from Firoozabadi (1993) experiment at surface conditions (using air from the atmosphere instead of gas) for gravity drainage in a stack of three matrix blocks separated by fractures.
Description Value
Tall matrix block length, m 1.815
Sectioned matrix block length, cm 60.5
Bottom cross section area, cm2 229.5=(15.152)
Porosity, fraction 0.216
Permeability at bottom of tall
matrix block, md
754
Permeability at top of tall matrix
block, md
406
Oil density, gm/cc 0.724
Oil viscosity, cp 0.866
Residual oil saturation, fraction 0.26
Oil relative permeability, fraction 5.3
1
−−=
or
ororo S
SSk
Capillary pressure in matrix, atm
−−−=
or
orocm S
SSP1
ln17.19.2325.101
1
Capillary pressure in fracture, atm ( )[ ]{ }21.0ln0081.215.0325.101
1 −−= ocf SP

143
Figure 7.1 Stack of five matrix blocks separated by fractures. There are also fractures at top and bottom of the stack.
Fracture
Fracture
Fracture
Fracture
Fracture
Fracture
Matrix
Matrix
Matrix
Matrix
Matrix
Gas at Constant Pressure
Oil Production by Gravity Drainage
Fracture
Fracture
Fracture
Fracture
Fracture
Fracture
Matrix
Matrix
Matrix
Matrix
Matrix
Gas at Constant Pressure
Oil Production by Gravity Drainage

144
Figure 7.2: Cumulative oil from a matrix block flowing to bottom fracture for different number of wells placed at bottom fracture (matrix grid 11x11x22).
Figure 7.3: Total cumulative oil production from matrix blocks to their adjacent lower fracture in a stack of 5 matrix blocks separated by fractures.
0
2
4
6
8
10
12
0 1000 2000 3000 4000 5000 6000 7000 8000 9000Time, days
Cum
ulat
ive
Oil
Prod
uctio
n, b
bl
Matrix at top of the stack to its lowerfractureMatrix at middle of the stack to itslower fractureMatrix at bottom of the stack to itslower fracture
0
0.1
0.2
0.3
0.4
0.5
0.6
0 1000 2000 3000 4000 5000 6000 7000Time, days
Cum
ulat
ive
Oil
Pro
duct
ion,
bbl

145
Figure 7.4: Dual porosity model of 5 matrix blocks with its fractures utilized to compare the fine grid system.
300 cm
300 cm
300 cm
300 cm
300 cm
Matrix
Matrix
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
Fracture
Fracture
300 cm
300 cm
Fracture
Fracture
300 cm
300 cm
300 cm
300 cm
300 cm
Matrix
Matrix
Matrix
Matrix
Matrix
Fracture
Fracture
Fracture
Fracture
Fracture
300 cm
300 cm
Fracture
Fracture
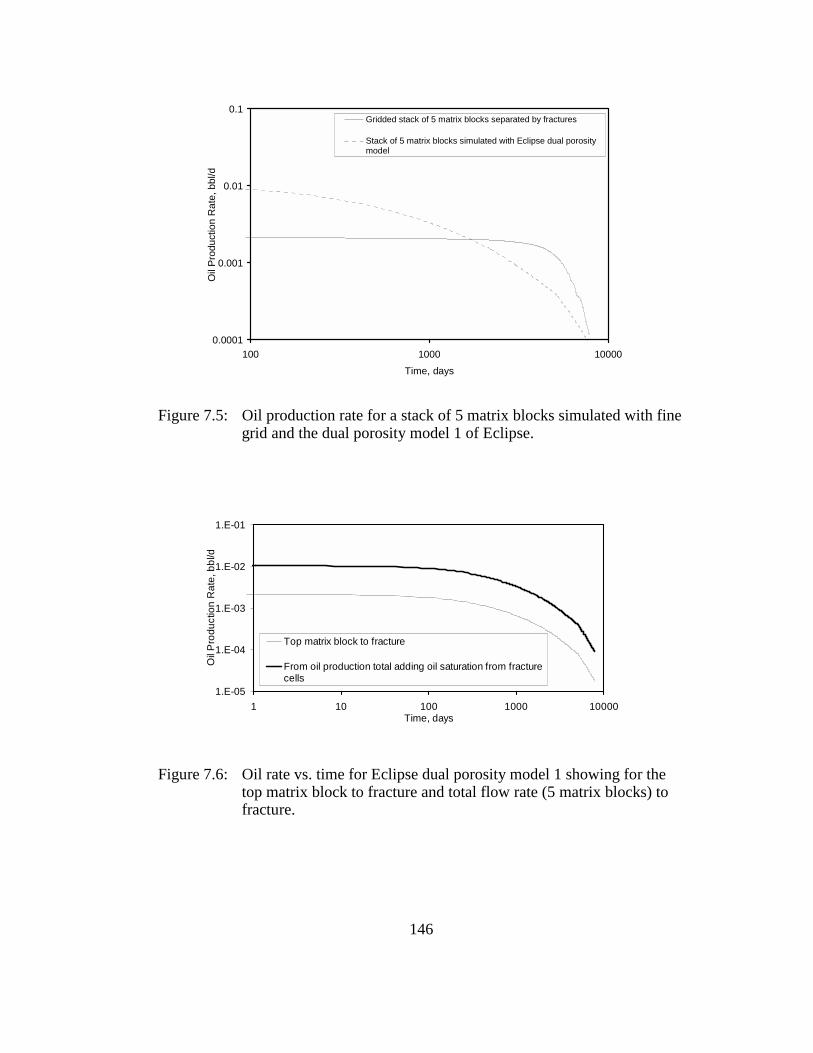
146
Figure 7.5: Oil production rate for a stack of 5 matrix blocks simulated with fine grid and the dual porosity model 1 of Eclipse.
1.E-05
1.E-04
1.E-03
1.E-02
1.E-01
1 10 100 1000 10000Time, days
Oil
Pro
duct
ion
Rat
e, b
bl/d
Top matrix block to fracture
From oil production total adding oil saturation from fracturecells
Figure 7.6: Oil rate vs. time for Eclipse dual porosity model 1 showing for the top matrix block to fracture and total flow rate (5 matrix blocks) to fracture.
0.0001
0.001
0.01
0.1
100 1000 10000Time, days
Oil
Pro
duct
ion
Rat
e, b
bl/d
Gridded stack of 5 matrix blocks separated by fractures
Stack of 5 matrix blocks simulated with Eclipse dual porositymodel

147
Figure 7.7: Oil production rate for each matrix block to its adjacent lower fracture for a stack of 5 matrix blocks. Simulated with fine grid model.
Figure 7.8: Pseudo oil relative permeability used in the dual porosity simulation in Eclipse dual porosity model to simulate a stack of 5 matrix blocks.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
0.4 0.5 0.6 0.7 0.8 0.9Oil Saturation
Pse
udo
Oil
Rel
ativ
e P
erm
eabi
lity
Oil relative permeability with eo=3
Pseudo oil relative permeability (oilrelative permeability divided by oilsaturation)
1.E-05
1.E-04
1.E-03
1.E-02
100 1000 10000Time, days
Oil
Rat
e fro
m M
atrix
to it
s A
djac
ent B
otto
m
Frac
ture
, bbl
/d
Matrix at top of the stack to itslower fracture
Matrix at middle of the stack toits lower fracture
Matrix at bottom of the stack toits lower fracture

148
Figure 7.9: Pseudo capillary pressure obtained with the procedures of Chapter 5.
Figure 7.10: Oil rate vs. time for a gridded stack of 5 matrix blocks and the same stack simulated with Eclipse dual porosity model using pseudo oil relative permeability and pseudo capillary pressure.
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.4 0.5 0.6 0.7 0.8 0.9Oil Saturation
Pse
udo
Cap
illar
y P
ress
ure,
atm
1.E-05
1.E-04
1.E-03
1.E-02
1.E-01
100 1000 10000 100000Time, days
Oil
Rat
e, b
bl/d
Gridded stack of 5 matrix blocks separated by fractures
Stack of matrix blocks with dual porosity, pseudo oilrelative permeability, and pseudo capillary pressure

149
Figure 7.11: Oil production of a gridded stack of 5 matrix blocks and a matrix block of equal size of the stack of 5 matrix blocks.
Figure 7.12: Oil saturation profiles in a matrix block of size equal to a stack of five matrix blocks flowing with gravity drainage.
1.E-05
1.E-04
1.E-03
1.E-02
100 1000 10000 100000Time, days
Oil
Pro
duct
ion
Rat
e, b
bl/d
Gridded stack of 5 matrix blocks separated by fractures
One matrix block with same size of a stack of 5 matrix blocks (gridded)
0
200
400
600
800
1000
1200
1400
0.5 0.6 0.7 0.8 0.9
Oil Saturation
Dep
th fr
om T
op o
f Mat
rix, c
m 0 days (Initialconditions)
601 days
3539 days
11048 days
23761 days
Static

150
Figure 7.13: Oil saturation profiles at different times for the gridded stack of five matrix blocks.
Figure 7.14: Oil pressure profiles at different times for the gridded stack of five matrix blocks.
0
200
400
600
800
1000
1200
1400
0.6 0.65 0.7 0.75 0.8 0.85 0.9
Oil Saturation
Dep
th fr
om T
op o
f Sta
ck o
f Mat
rix B
lock
s, c
m
0.00 days
442 days
2017 days
4513 days
22848 days
0
200
400
600
800
1000
1200
1400
79.6 79.8 80.0 80.2 80.4 80.6 80.8 81.0 81.2 81.4
Oil Pressure, atm
Dep
th fr
om T
op o
f Sta
ck o
f Mat
rix B
lock
s, c
m 0.00 days (Initialconditions)
4.17 days and gas gradient
4513 days
22848 days

151
Figure 7.15: Oil pressure profiles at different times for the gridded matrix block with same size that the stack of five matrix blocks.
Figure 7.16: Remaining oil saturation vs. size of matrix blocks and static oil saturation given by capillary pressure.
0
200
400
600
800
1000
1200
1400
78.5 79 79.5 80 80.5 81 81.5
Oil Saturation
Dep
th fr
om T
op o
f Mat
rix, c
m 0 days (Initialconditions)
Gas gradientand 3 days
3538.747917days
11047.70417days
23760.62083days
Oil gradient
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9Oil Saturation
Mat
rix H
eigh
t fro
m B
otto
m o
f Mat
rix, c
m
Average oil saturation remaining in the matrix block
Static oil saturation

152
Figure 7.17: Oil production rate vs. time for a stack of three matrix blocks with gravity drainage from Firoozabadi (1993) experiments and 1D simulation with Eclipse.
Figure 7.18: Cummulative oil production vs. time for a stack of three matrix blocks with gravity drainage from Firoozabadi (1993) experiments and 1D simulation with Eclipse.
1.E-02
1.E-01
1.E+00
1.E+01
1.E+02
1.E+03
1.E+04
1 10 100 1000 10000 100000Time, hrs
Oil
Pro
duct
ion
Rat
e, c
c/hr
Firoozabadi experiment
Eclipse simulation
0
500
1000
1500
2000
2500
1 10 100 1000 10000 100000Time, hrs
Cum
mul
ativ
e O
il Pr
oduc
tion,
cc
Firoozabadi experimentEclipse simulation

153
Chapter 8 Conclusions and Recommendations
The following conclusions and recommendations were derived from this
study.
8.1 CONCLUSIONS
1. For dual porosity models a procedure is established to determine
pseudo oil relative permeability and pseudo capillary pressure with
and without fine grid simulation of a matrix block.
2. The pseudo oil relative permeability is calculated with the Corey
exponent of a real oil relative permeability and it can also be
calculated with oil relative permeability in tabular form.
3. The Beck et al. dual porosity model better represents oil transfer
from matrix to fracture than others dual porosity models.
4. In 3D flow with gravity drainage the flow in the lateral direction is
negligible.
5. In a matrix block with gravity drainage, oil flux from opening 75%
or more of the bottom face of the matrix block is similar to oil flux
with a complete bottom face opened to flow. When flow has
restrictions at the bottom of the matrix block flow goes to lateral
fractures.

154
6. In 3D flow in a stack of matrix blocks separated by fractures, oil
reinfiltrates from upper to lower matrix blocks with negligible oil
flow to the lateral direction.
7. Maximum oil flux at the bottom of a stack of any number of matrix
blocks with gravity drainage is given by Darcy’ law using the end
point oil relative permeability and the difference of fluid densities
for the derivative of potential. At early times there is a maximum
oil flux with gravity segregation. The duration and decline of this
oil flux depends on the number and height of blocks stacked.
8. Gas viscous pressure drops have major influence in oil flux in
zones of first contact of gas with oil (low gas saturation zones).
Neglecting gas viscous pressure drop is not meaningful in gridded
matrix block simulations. Neglecting gas mobility in dual porosity
models match closely with gridded matrix blocks simulations.
9. A model in 1D in vertical direction accurately represents gas-oil
flow with gravity drainage in 2D or 3D flow, for one matrix block
and for a stack of matrix blocks.
8.2 RECOMMENDATIONS
1. Due to oil reinfiltration it is recommendable to test Bech et al.
model in dual permeability simulators, which consider matrix-
matrix oil transfer.

155
2. Due to oil flow is mainly vertical from upper to lower matrix
blocks it is convenient to determine gravity drainage in inclined
stack of matrix blocks in order to evaluate partial reinfiltration
from upper to lower matrix blocks.

156
APPENDIX A Solution to 1D Vertical Gravity Drainage
Equation 4.33 is a second order non-linear partial differential equation for
flow of gravity drainage considering negligible viscous pressure drop in the gas
phase. This Appendix shows the solution of this equation with the finite
difference method. The equation to solve is
01 =
−
∂∂
∂∂+
∂∂
D
croD
DD
oD
zP
kzt
S (A.1)
Initial and boundary conditions are
( ) 10, ==DDoD tzS (A.2)
1=∂∂
topD
cD
zP
(A.3)
0=bottomcDP (A.4)
Applying finite differences and considering block-centered grids (Fig.
A.1),

157
0111
2/12/1
,, =
−
∂∂
−
−
∂∂
∆+
∆−
−+ iD
cDroD
iD
cDroD
Di
nioDioD
zP
kzP
kzt
SS (A.5)
Developing the terms in brackets gives
tSS n
ioDioD
∆− ,, ( )
∆−−
∆∆+ ++
+2/1,,1,
2/1
1iDicDicD
iD
roD
Di
zPPz
kz
( ) 02/1,1,,2/1
=
∆−−
∆− −−
−iDicDicD
iD
roD zPPz
k (A.6)
Using the implicit method for solving this equation, the terms oDS , cDP ,
and roDk are evaluated at time 1+n . If all Dz∆ are equal,
( )2Dztr
∆∆= (A.7)
Substituting Eq. A.7 into Eq. A.6 gives
( )[ DicDicDiroDn
ioDioD zPPkrSS ∆−−+− ++ ,1,2/1,,,
( )] 01,,2/1, =∆−−− −− DicDicDiroD zPPk (A.8)
Equation A.8, for cells 2 and 3, respectively, gives
( )[ DcDcDroDnoDoD zPPkrSS ∆−−+− + 2,3,2/12,2,2,

158
( )] 01,2,2/12, =∆−−− − DcDcDroD zPPk (A.9)
and
( )[ DcDcDroDnoDoD zPPkrSS ∆−−+− + 3,4,2/13,3,3,
( )] 02,3,2/13, =∆−−− − DcDcDroD zPPk (A.10)
Equations for the first cell (bottom) and the last cell (top) include
boundary conditions. Development for cell one from Eq. A.1 and using a block-
centered grid using the distance from the bottom boundary to the center of the cell
as 2/z∆ , gives
( )
∆−−
∆∆+
∆−
+DcDcD
D
roD
D
noDoD zPP
zk
ztSS
1,2,2/11
1,1, 1
012/
2/11,1,2/11
=
−
∆−
− −−
D
cDcDroD z
PPk (A.11)
The boundary condition at cell one is 02/11, =−cP . Substituting the value of
r given by Eq. A.7 in Eq. A.11 gives
( ) ( )[ ] 02 1,2/11,1,2,2/11,1,1, =∆−−∆−−+− −+ DcDroDDcDcDroDnoDoD zPkzPPkrSS (A.12)
An equivalent form of Eq. A.5 for cell N gives

159
0111
2/12/1
,, =
−
∂∂
−
−
∂∂
∆+
∆−
−+ ND
cDroD
ND
cDroD
D
nNoDNoD
zPk
zPk
ztSS
(A.13)
The boundary condition at the top of the matrix is 1=∂∂
D
cD
zP
. Substituting
in Eq. A.13 gives
012/1
,, =
−
∂∂
−∆∆+−
−ND
cDroD
D
nNoDNoD z
PkztSS (A.14)
Expanding the spatial derivative,
011,,2/1,, =
−
∆−
−∆∆+− −
−D
NcDNcDNroD
D
nNoDNoD z
PPk
ztSS (A.15)
Substituting r from Eq. A.7 into Eq. A.15,
( )[ ] 01,,2/1,, =∆−−−+− −− DNcDNcDNroDn
NoDNoD zPPkrSS (A.16)
Derivatives of each cell equation are taken with respect to saturation in
order to construct a matrix of derivatives (Jacobian matrix) are
( )2/11,2/11,'
1,11,
1 21 −+ +−=∂
∂roDroDcD
oD
kkPrS
f (A.17)

160
2/11,'
2,12,
1+=
∂∂
roDcDoD
kPrS
f (A.18)
2/12,'
1,21,
2−=
∂∂
roDcDoD
kPrS
f (A.19)
( )2/12,2/12,'
2,22,
2 1 −+ +−=∂
∂roDroDcD
oD
kkPrS
f (A.20)
2/12,'
3,23,
2+=
∂∂
roDcDoD
kPrS
f (A.21)
.
.
.
2/1,'
1,1,
−−−
=∂
∂NroDNcDN
NoD
N kPrS
f (A.22)
2/1,'
,1 −−=∂∂
NroDNcDNoDN
N kPrSf (A.23)
where roDk is evaluated upstream and 1f , 2f , 3f , and nf are the equations A.12,
A.9, A.10, and Eq. A.16, respectively.
Eq. 4.43 represents oil flux at any position in the matrix, then oil flux at
the outlet of the matrix block in finite difference form,

161
−
∆−
= −−− 1
2/2/11,1,
2/11,2/11,D
cDcDroDoD z
PPku (A.24)
where 02/11, =−cDP represents capillary pressure at the lower boundary of the
matrix. Considering this in Eq. A.24 gives
−
∆= −− 1
2 1,2/11,2/11,
D
cDroDoD z
Pku (A.25)
or
( )DcDD
roDoD zP
zk
u ∆−∆
= −− 1,
2/11,2/11, 2 (A.26)
This equation is solved at time 1+n just after each saturation is calculated
with the implicit model.

162
Figure A.1: Block centered grid used to numerically solve Eq. 4.33 in one dimension in the vertical direction.
∆zD7-1/2
12
3
19
20
∆zD1-1/2
∆zD3
PcD=0
1=∂∂
D
cD
zP
∆zD7-1/2
12
3
19
20
∆zD1-1/2
∆zD3
PcD=0
1=∂∂
D
cD
zP

163
APPENDIX B: Dimensionless Form of Transfer Function
This appendix shows the oil transfer function in dimensionless form.
From Eq. 4.39,
∆−
∂∂
=c
c
o
roo g
gzPAkk
q ρµ
(B.1)
Dividing by bulk volume, bV , and defining,
b
oo V
q=τ (B.2)
Substituting Eq. B.2 into Eq. B.1,
∆−
∂∂
=c
c
bo
roo g
gzP
VAkk ρ
µτ (B.3)
To transform Eq. B.3 to dimensionless form, first multiply by hh / and
group terms,
∆−
∂∂
= hgg
zP
kkA
hV
cD
cro
obo ρτµ (B.4)
164
In Eq. B.4, hzzD /= . Dividing Eq. B.4 by hgg
c
ρ∆ ,
−
∂∂
=∆
1D
cDro
c
obo
zP
k
ggkA
V
ρ
τµ (B.5)
whereh
gg
PP
c
ccD
ρ∆= .
Dividing Eq. B.5 by 0rok ,
−
∂∂
=∆
10 D
cDroD
cro
obo
zP
k
ggAkk
V
ρ
τµ (B.6)
Defining dimensionless transfer function as:
cro
obooD
ggAkk
V
ρ
τµτ∆
=0
(B.7)
Substituting into Eq. B.5,
−
∂∂
= 1D
cDroDoD z
Pkτ (B.8)

165
Appendix C Height of Oil and Gas with Vertical Equilibrium
This Appendix determines the vertical section of each phase in a matrix
block based on vertical equilibrium and total fluid segregation. This phase vertical
section of is used in matrix or fracture blocks for dual porosity models with flow
in 1D vertical direction.
Aziz et al. (1999) establishes that for vertical fluid distribution due to
gravity equilibrium the average saturation of a phase p is determined by
( ) ( )
( )∫∫= h
h
pp
dzz
dzzSzS
0
0
φ
φ (C.1)
For a totally segregated gas-oil system with gravity drainage and
considering constant porosity, initial gas, and initial water saturation in Eq. C.1
(Fig. C.1),
( ) ( )[ ]ogiwiooo hSShhSh
S −−+−= 11min (C.2)
Where h is the height of the matrix block and oh is the oil height in the
matrix block. Developing Eq. C.2,
( )wigiooooo SShShhShS −−+−= 1minmin (C.3)

166
Obtaining oh ,
wigio
ooo SSS
SShh
−−−−
=min
min
1 (C.4)
For the gas phase,
( ) ( )[ ]ggigwiog hhShSSh
S −+−−= min11 (C.5)
Where gh is the gas height in the matrix block. Developing Eq. C.5,
( ) ggigigwiog hShShSShS −+−−= min1 (C.6)
Obtaining gh ,
wigio
gig
g SSSSS
hh−−−
−=
min1 (C.7)
For a water-oil system with initial gas saturation and from Fig. C.1,
( ) ( )[ ]ooogiwio hhShSSh
S −+−−= min11 (C.8)
Developing,

167
( ) oooogiwio hShShSShS minmin1 −+−−= (C.9)
Obtaining oh ,
wigio
ooo SSS
SShh
−−−−
=min
min
1 (C.10)
Equation C.10 is the same as Eq. C.4. The average water saturation,
( ) ( )[ ]wgiowwiw hSShhSh
S −−+−= min11 (C.11)
Where wh is the water height in the matrix block. Developing Eq. C.11,
( ) wgiowwiwiw hSShShShS −−+−= min1 (C.12)
Obtaining wh
giwio
wiww SSS
SShh
−−−−
=min1
(C.13)
Equations C.4, C.7, and C.13 were also presented by Sonier et al. (1986).
Figure C.2 shows variation of oh with respect to average oil saturation. It is
important to consider minoS instead of orS in Eqs. C.4, C.7, and C.13. Figure C.2

168
shows calculations of the oil height in the matrix block considering minoS and
orS . For a saturation value, calculations using orS gives greater oil height values
than using minoS . In a matrix block the minimum oil saturation at infinite time of
simulation will be minoS and will never reach orS . Therefore, calculations with
orS will over estimate oil saturations at vertical equilibrium.
These equations can be used for fracture or matrix. For the purpose of this
study 0=giS , therefore Eqs. C.4, C.7, and C.13 for matrix and dividing by h , are
the same as definitions of dimensionless variables for oil, gas, and water,
respectively;
wimo
oomomoD SS
SSh
hS−−
−==
min
min
1 (C.14)
wimo
gmgmgD SS
Sh
hS
−−==
min1 (C.15)
wimo
wiwmwmwD SS
SSh
hS−−
−==
min1 (C.16)

169
Figure C.1: Representation in vertical equilibrium of saturation of fluids in a matrix block at initial conditions, in a gas-oil system and in a water-oil system, Aziz et al. (1999).
0 1
Som in 1-Swi
0 1
Som in 1-Swi
hg
ho
a) M atrix block saturated with oil, initial water, and initial gas b) M atrix block saturated with oil, gas, and initial water
h
1-Swi-Sgi 1-Swi-Sgi
So So
0 1
Som in 1-Swi
0 1
Som in 1-Swi
hg
ho
a) M atrix block saturated with oil, initial water, and initial gas b) M atrix block saturated with oil, gas, and initial water
h
1-Swi-Sgi 1-Swi-Sgi
So So
0 1
Somin 1-Sgi
ho
hw
c) Matrix block saturated with oil, water, and initial gas
∆zm
1-Swi-Sgi
So
0 1
Somin 1-Sgi
ho
hw
c) Matrix block saturated with oil, water, and initial gas
∆zm
1-Swi-Sgi
So
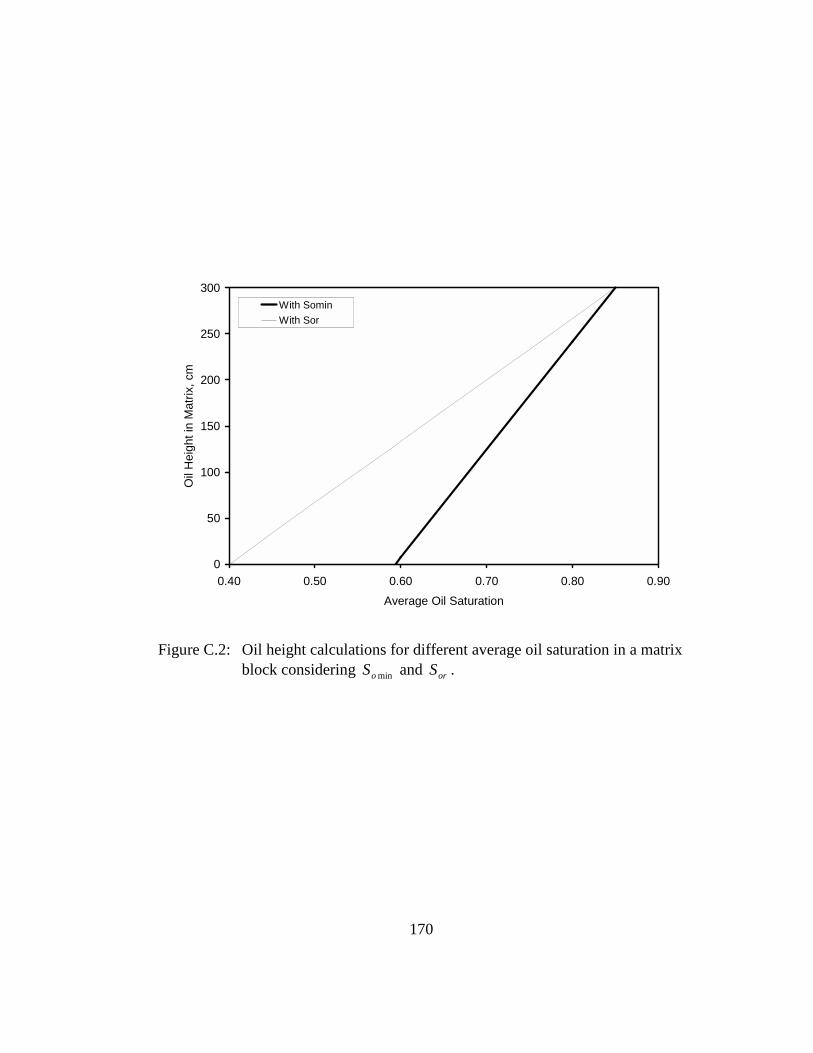
170
Figure C.2: Oil height calculations for different average oil saturation in a matrix block considering minoS and orS .
0
50
100
150
200
250
300
0.40 0.50 0.60 0.70 0.80 0.90Average Oil Saturation
Oil
Hei
ght i
n M
atrix
, cm
With SominWith Sor

171
Appendix D Dimensionless Form of Dual Porosity Models
Chapter 5 shows the development of gravity drainage dual porosity
models. This Appendix shows the development of these dual porosity models in
dimensionless form.
D.1 ECLIPSE MODEL
To transform Eq. 5.17 into dimensionless form, first divide by 0ro
c
kggz ρ∆∆ , considering 1=gfDS , gmDoD SS −=1 , and rearranging terms,
∆∆−=
∆∆c
cmoD
ro
ro
crom
oo
ggz
PS
kk
ggzkk ρρσ
τµ0
0 (D.1)
Defining
o
crom
ooD
ggzkk
τσρ
µτ∆∆
=0
(D.2)
Additionally, roDk and cmDP are defined by Eqs. 4.27 and 4.29,
respectively ( oDS is defined by Eq. 5.20). Substituting Eqs. D.2, 4.27, and 4.29
into Eq. D.1,

172
( )cmDoDroDoD PSk −=τ (D.3)
To transform Eq. 5.19 to dimensionless form, first divide Eq. 5.18 by
cro g
gzk ρ∆∆0 and substitute Eq. 4.29 into Eq. 5.18,
( )cmDoDroDo
crom
o PSkdt
dS
ggzkk
−−=∆∆ ρσ
φµ0
(D.4)
Considering, ( )minooo SS
dtd
dtdS
−= , multiplying Eq. D.4 by
( ) ( )wiowio SSSS −−−− minmin 1/1 , and substituting oDS given by Eq. 5.20,
( ) ( )cmDoDroD
oD
crom
owio PSkdt
dS
ggzkk
SS−−=
∆∆
−−
ρσ
φµ0
min1 (D.5)
Defining Dt by
( ) tSS
ggzkk
towio
crom
D φµ
ρσ
−−
∆∆=
min
0
1 (D.6)
Considering the definition of σ (Eq. 5.31), Eq. D.6 is very similar to Eq.
4.32. Substituting Eq. D.6 in Eq. D.5,

173
( )oDcmDroDD
oD SPkdt
dS−= (D.7)
Integrating Eq. D.7,
( )( )
∫ −= DoD tS
oDcmDroD
oDD SPk
dSt
0 (D.8)
which is Eq. 5.19 in dimensionless form.
D.2 QUANDALLE AND SABATHIER MODEL
Dividing Eq. 5.47 by zgg
c
∆∆ρ and considering 0=cfP ,
−∆∆
−=∆∆ 2
12z
gg
Pk
zgg
c
cmzrom
c
oz
ρσλ
ρ
τ (D.9)
Dividing by 0rok and substituting the definitions of roDk and cmDP (Eqs.
4.27 and 4.29) into Eq. D.9,
−−=
∆∆ 212
0cmDz
o
roDm
cro
oz Pk
kz
ggk
σµρ
τ (D.10)

174
Arranging terms and substituting Eq. D.2 into Eq. D.10,
−= cmDroDoD Pk
212τ (D.11)
To transform Eq. 5.49 to dimensionless form, first multiply Eq. 5.48 by
( ) ( )wiowio SSSS −−−− minmin 1/1 ,
( )
∆∆−−=−−2
21 min
zggPP
kkdt
dSSS
ccfcm
o
zromoDwio ρ
φµσ
(D.12)
Dividing by zggk
cro ∆∆ρ0 and considering 0=cfP in Eq. D.12,
−∆∆
=∆∆
−−2121
00
min
zgg
Pk
kkdt
dS
zggk
SS
c
cm
roo
zromoD
cro
wio
ρφµσ
ρ (D.13)
Substituting Eqs. 4.27 and 4.29 into Eq. D.13,
( )
−=
∆∆
−−212
10
mincmDroD
oD
zc
rom
wioo Pkdt
dS
zggkk
SS
σρ
φµ (D.14)
Substituting Eq. D.6 into Eq. D.14,

175
−=
212 cmDroD
D
oD Pkdt
dS (D.15)
Separating variables and integrating,
( )
∫
−
= DoD tS
cmDroD
oDD
Pk
dSt
0
212
(D.16)
which is Eq. 5.49 in dimensionless form.
D.3 BECH ET AL. MODEL
Considering 0=cfP in Eq. 5.96, dividing by zkgg
roc
∆∆ 0ρ , and grouping
terms,
∆−
−∆∆
−=∆∆ z
zz
zgg
pSkk
ggzkk
gmgf
c
cm
omDro
ro
crom
oo
ρσρ
τµ0
0 (D.17)
From Appendix C, gfDgf zSz ∆= , gmDgm zSz ∆= , considering 1=gfz ,
gmoD zz −=1 , and substituting Eqs. 4.27, 4.29, and Eq. D.2 into Eq. D.17,
( )oDcmDoD
roDoD SP
Sk
−−=τ (D.18)

176
To transform Eq. 5.98 to dimensionless form, first substitute
( )minooo SS
ttS
−∂∂=
∂∂
into Eq. 5.97, multiply by ( ) ( )wiowio SSSS −−−− minmin 1/1 ,
divide by c
ro ggzk ρ∆∆0 , and substitute Eq. 5.20,
( ) ( )omDcmD
omD
roDoD
crom
owio SPSk
tS
ggzkk
SS−=
∂∂
∆∆
−−
σρ
φµ0
min1 (D.19)
Substituting Eq. D.6 into Eq. D.19,
( )omDcmDomD
roD
D
oD SPSk
dtdS
−= (D.20)
Separating variables and integrating
( )( )
∫−
= DoD tS
omDcmDomD
roD
oDD
SPSk
dSt
0 (D.21)
which is Eq. 5.98 in dimensionless form.

177
Appendix E Oil Saturation Due to Capillarity
This Appendix shows the determination of average saturation distribution
in the matrix at static conditions due to capillarity.
E.1 AVERAGE SATURATION DISTRIBUTION IN THE MATRIX BLOCK AT STATIC CONDITIONS
Figure 4.5 shows dimensionless capillary pressure. An analytical equation
is given in Table 4.2:
( ) pceoDcDcD SPP −= 10 (E.1)
where cDP is defined by Eq. 4.29, oDS is defined by Eq. 4.28, and 0cDP is
defined by the following equation:
hgg
PP
c
ccD
ρ∆=
00 (E.2)
Capillary pressure at static conditions,
hggP
cc ρ∆= (E.3)
Dividing Eq. E.3 by zgg
c
∆∆ρ results in

178
DcD hP = (E.4)
where z
gg
PP
c
ccD
∆∆=
ρ and
zhhD ∆
= . Substituting Eq. E.4 in E.1 and
integrating from zero to 1, oDS can be calculated by
( ) oDS
eoD
D
cDoDoD SdS
hPSS
oD
pc ~~110
minmin
∫ −+= (E.5)
where minoDS is dimensionless oil saturation at minimum saturation in the
matrix that corresponds to 1=Dh ( 1=cDP ). Solving the integration with a change
of variables,
( )
11 1
min0
min +−
+=+
pc
eoD
D
cDoDoD
eS
hP
SSpc
(E.6)
Considering 1=Dh (top of matrix),
( )
11 1
min0min +
−+=
+
pc
eoD
cDoDoDeS
PSSpc
(E.7)
Substituting values from Table 4.4 the second term in the RHS of Eq. E.7
is equal to 0.0814 and total average dimensionless oil saturation at static
conditions is 511.0=oDS .

179
The average oil saturation can thus be calculated with the following
equation.
∫−
−−−
−∆
+=wi
o
pcS
So
e
wior
oro
c
coo Sd
SSSS
ggh
PSS
10
min
min
~1
~1
ρ (E.8)
where minoS is oil saturation at top of the matrix with static conditions and oS~ is
an integration variable. Solving the integral by a change of variables,
( )1
min0
min 11
1)1(
+
−−−
−+−−
∆+=
pce
wior
oro
pc
wior
c
coo
SSSS
eSS
ggh
PSSρ
(E.9)
Substituting information from Tables 4.1 and 4.2 into Eq. E.9 gives
63.0=oS , which in dimensionless form results in 511.0=oDS .

180
Appendix F Gas Mobility Effects
In Chapter 4 the development of vertical flow with gravity drainage
considered negligible viscous pressure drop in the gas phase. In Chapter 5 the
analysis of the dual porosity models neglects the effect of gas mobility. This
Appendix analyses these effects.
F.1 NEGLECTING GAS VISCOUS FORCES
Figure F.1 shows oil flux of a gridded matrix block with gravity drainage
considering two different curves of gas relative permeability. One is given by the
Corey type equation considering a gas exponent ( ge ) equal to 2 and the end point
gas relative permeability ( 0rgk ) equal to 0.32 (Table 4.2). The other curve
corresponds to an “ideal” gas relative permeability (a straight line with slope
equal to 45 degrees).
Figure F.2 Shows oil flux using gas relative permeability with a straight
line and oil flux obtained with the vertical drainage equation, which neglects
viscous pressure drop in the gas phase. The match is better than considering gas
relative permeability represented with the Corey type equation with gas exponent
eg=2 (Table 4.2). Figure F.3 shows different saturation profiles at different times
using gas relative permeability represented by a straight line with slope equal to
45 degrees and the vertical drainage equation that neglects gas viscous pressure
drop. Figure 4.10 shows saturation profiles at different times using gas relative

181
permeability with the Corey type equation (eg=2). Comparing Figs. 4.10 of
Chapter 4 and F.3, using gas relative permeability represented by a straight line
matches better with the vertical gravity equation. Previous observations conclude
that using a straight line gas relative permeability is more like neglecting viscous
pressure drop in the gas phase.
F.2 NEGLECTING GAS MOBILITY
The term in the denominator of dual porosity models (Eqs. 5.15, 5.44, and
5.91) adds ratios of viscosity divided by relative permeability for oil and gas. Gas
viscosity is small compared with oil viscosity ( =gµ 0.015 cp, =oµ 3.14 cp), but
when gas saturation is very small (high oil saturation or beginning of gravity
drainage) gas relative permeability is also very small (krg=0.0002). This makes
rgg k/µ greater than and dominant compared with roo k/µ .
Figure F.4 shows roo k/µ and rgg k/µ . Modifying the gas relative
permeability exponent ( ge ) equal one such that the gas phase is more
“moveable,” the results are similar to Fig. F.4, but with the intersection between
curves slightly to the right hand side. Figure F.5 shows oil and gas mobility where
the intersection with both curves has relation with Fig. F.4, which means that gas
mobility is less than oil mobility at low gas saturations. Figure F.6 shows the
transfer function for the cases shown above. This makes a difference in the dual
porosity models at short times, but matches at long times when gas mobility
dominates oil mobility.

182
From oil flux in Figs. F.1 and F.2 and the previous observations, the dual
porosity models match better neglecting the gas mobility term. This is due to the
fact that in the gridded system, low gas mobility has more effect in the cells with
low gas saturation (first contact of oil by gas). However, the “general” behavior is
not greatly affected due to the low gas saturation cells are less in number
compared with the whole cells of the matrix block. In the case of dual porosity
models (one cell model) the low gas mobility effect is enhanced. Therefore the
low gas mobility effect must be neglected in dual porosity models.

183
Figure F.1: Oil flux vs. time modifying the gas relative permeability to a straight line of slope 45 degrees compared with the Corey type equation of Table 4.2.
Figure F.2: Oil flux vs. time from a matrix block with gravity drainage using a modified gas relative permeability with a straight line of 45 degrees and the vertical gravity equation neglecting gas viscous pressure drops.
1.E-07
1.E-06
1.E-05
1.E-04
100 1000 10000Time, days
Oil
Flux
, bbl
/d/ft
2
Gas relative permeability with an exponent (eg) equal 2and end point gas relative permeability equal 0.32
Modification of gas relative permeability to a straight linewith slope 45 degrees
1.E-07
1.E-06
1.E-05
1.E-04
100 1000 10000Time, days
Oil
Flux
, bbl
/d/ft
2
Modification of gas relative permeability to a straightline with slope 45 degrees
Vertical gravity equation neglecting gas viscouspressure drop

184
Figure F.3: Saturation profiles at different times for a matrix block with gravity drainage for a) using gas relative permeability with a straight line of 45 degrees and b) vertical gravity equation that neglects gas viscous pressure drops.
Figure F.4: Ratio gas viscosity/gas relative permeability and oil viscosity/oil relative permeability and addition of both ratios.
1E-02
1E-01
1E+00
1E+01
1E+02
1E+03
1E+04
0.40 0.50 0.60 0.70 0.80 0.90
Oil Saturation
Rat
io V
isco
sity
/Rel
ativ
e Pe
rmea
bilit
y, c
p
Oil viscosity divided by oil relative permeability
Gas viscosity divided by gas relative permeability
Addition of both ratios
0
50
100
150
200
250
300
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9Oil Saturation
Mat
rix H
eigh
t fro
m B
otto
m o
f Mat
rix, c
m
Eclipse, 736 days (gas relativepermeability with a straight line ofslope equal to 45 degrees)
Eclipse, 2557 days (gas relativepermeability with a straight line ofslope equal to 45 degrees)
Vertical gravity equation, 729 days(Neglecting gas viscous pressuredrop)
Vertical gravity equation, 2553days (Neglecting gas viscouspressure drop)
Static

185
Figure F.5: Oil and gas mobility for the Corey type equation with oil and gas exponents equal to 3 and 2, respectively ( oe and ge ).
Figure F.6: Transfer function with the dual porosity model with and without gas mobility term. When including gas mobility term there are two cases of gas relative permeability exponent (eg=2, eg=1).
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
1.E+01
1.E+02
0.40 0.50 0.60 0.70 0.80 0.90Oil Saturation
Mob
ility
, 1/c
p
Oil mobility
Gas mobility
1E-08
1E-07
1E-06
1E-05
10 100 1000 10000Time, days
Tran
sfer
Fun
ctio
n, b
bl/d
/ft3
Bech et al. dual porosity model with no gas mobilityterm (Integral solution)Bech et al. dual porosity model including gas movilityterm, eg=2 (Integral solution)Beck et al. dual porosity model (including gas movilityterm, eg=1)

186
Appendix G Code in C++ and Eclipse File for Solving 1D Vertical Gravity Drainage
This appendix shows the code in C++ to solve 1D vertical gravity
drainage and the Eclipse data file to simulate the same case for vertical gravity
drainage.
G.1 C++ CODE FOR VERTICAL GRAVITY DRAINAGE IN 1D /* ================ Nemesio Miguel-H Petroleum and Geosystems Engineering The University of Texas at Austin One-Dimensional, Two-Phase (gas/Oil) Implicit, Gravity Drainage, with Somin Eqs. 4.33, Boundary Conditions Eqs. 4.34 and 4.37 Flux Eq. 4.43, Development Appendix A. */ #include <iostream.h> #include <fstream.h> #include <math.h> #include <stdlib.h> #include <iomanip.h> const double C1=1/1.0133e6; // Darcy constant to convert from //dynes/cm2 to atm double R, Somin, Sor, Swi, sumSoD; double DZD, DTD, TSIMD, TSIMDF,UOD; double A[104][104]; double *X, *D, *Son, *SonD, *SonpD; double error, error1; char ch[1]; int N,i,j,k,iter,iprint,iscreen,ip; // Read Input Data void ReadInput() {

187
N =40; //number of grids in Z-direction (N) Somin=0.5935; Swi=0.15; Sor=0.40; cout<<"TSIMDF ="; cin>>TSIMDF; //total dimensionless simulation time }//end of ReadInput // Dynamic Memory Allocation // A -> jacobian matrix // D, X -> RHS and calculated values for Newton raphson // SonD -> dimensionles oil saturation at time n // SonpD -> dimensionles oil saturation at time n+1 void Allocate() { D = new double[N]; X = new double[N]; Son = new double[N]; SonD= new double[N]; SonpD= new double[N]; }//end of Allocate // dimensionles capillary pressure double fPCD(double SoD){ double n; n=6.0; return 29.191635*pow(1-SoD,n); }//end of fPCD double fPCDP(double SoD){ double n; n=6.0; return -n*29.191635*pow(1.0-SoD,n-1.0); }//end of fPCDP // dimensionless oil relative permeability double fKROD(double SoD){ double nn, SoDs; nn=3.0; return pow(SoD,nn); }//end of KROD // Initialize Reservoir void Initialize(){ DZD = 1.0/N; //1.0 converts to float, dimensionless ZD for(i=0; i<=N-1; i++) SonD[i]=1.0;//dimensionless oil sat. }//end of Initialize

188
// Soubroutine Gauss //A main matrix (in this case this is a jacobian) //D RHS of the matrix //X Vector Solution //N Dimension of the matrix void Gauss() { double piv,sum; // *********** Gauss Calculations ************** for (i = 1; i <= N-1; i++){ for (k=i; k<=N-1; k++){ piv=A[k][i-1]/A[i-1][i-1]; D[k]=D[k]-D[i-1]*piv; for (j=0;j<=N-1;j++){ A[k][j]=A[k][j]-A[i-1][j]*piv;}; }; }; // ******Inverse procesess ********** for (i=N-1;i>= 0;i--){ sum=0.0; for (j=(i+1); j<=N-1;j++){ sum=sum+A[i][j]*X[j]; } X[i]=(D[i]-sum)/A[i][i]; } }//end of Gauss // The IMPLICIT method with three-point central difference //approximation // of the space discretization, and forward difference for time //derivative void SolveIMPLI() { double KROD[104],PCD[104],PCDP[104]; //Cells are from bottom to top //depth reference is at the bottom //Initialize the Implicit variables ofstream writefile("exit.dat",ios::out);//output at file //exit.dat for(i=0;i<=N-1;i++) SonpD[i]=SonD[i];//Initialize the SonpD for //next calc TSIMD=0.0; ip=0; DTD=0.0001;//in this case ignores time as data

189
iprint=100;//print each DTD's (See DTD value) iscreen=23; R=DTD/(DZD*DZD);//DZD=constant //cout<<"example Pc="<<fKROD (0.6247)<<"Cont?(y,^c)";cin >>ch[0]; while(TSIMD <= TSIMDF) { iter=1; error=1.0; ip=ip+1; //cout<<" DTD= "<<DTD<<" TSIMD="<<TSIMD<<"Cont?(y,^c)";cin >>ch[0]; while(error >= 0.0000001){
//Put zeros at the jacobian as initial value for(i=0; i<=N-1;i++){ for (j=0;j<=N-1;j++){ A[i][j]=0.0; }; D[i]=0.0; } //makes only one calculation of KROD and PCDD for (i=0;i<=N-1;i++){ KROD [i]=fKROD (SonpD[i]); PCD [i]=fPCD (SonpD[i]); PCDP [i]=fPCDP (SonpD[i]); //cout<<PCD[i]<<" "<<PCDP[i]<<"Cont?(y,^c)";cin >>ch[0]; } //fill out the Jacobian A matrix three diagonals for (i=0;i<=N-1;i++){ if (i>0 && i<N-1)A[i][i]= 1.0 - R*PCDP[i]*(KROD [i+1] + KROD[i ]); if (i == 0 )A[i][i]= 1.0 - R*PCDP[i]*(KROD [i+1] +2.* KROD[i ]); if (i == N-1 )A[i][i]= 1.0 - R*PCDP[i]*( KROD[i ]); } //MD(main Diagonal) for (i=0;i<=N-2;i++){ A[i][i+1]= R*PCDP[i+1]*KROD[i+1]; } //UP1(first upper diagonal) for (i=1;i<=N-1;i++){ A[i][i-1]= R*PCDP[i-1]*KROD[i];

190
} //DOWN1(first down diagonal) //Fill RHS (D vector) of the Newton Method for(i=0;i<=N-1;i++){ if (i>0 && i<N-1)D[i]=-( SonpD[i]-SonD[i] +R*(KROD[i+1]*(PCD[i+1]-PCD[i]-DZD)-KROD [i]*( PCD[i]-PCD[i-1]-DZD)) ); if (i==0 )D[i]=-( SonpD[i]-SonD[i] +R*(KROD[i+1]*(PCD[i+1]-PCD[i]-DZD)-KROD [i]*(2*PCD[i]-2*( 0.0)-DZD)) ); if (i==N-1 )D[i]=-( SonpD[i]-SonD[i] +R*( -KROD [i]*( PCD[i]-PCD[i-1]-DZD)) ); } //print A matrix and D vector //for(i=0;i<=N-1;i++){for (j=0;j<=N-1;j++)cout<<" "<<A[i][j];cout<<" "<<D[i]<<endl; //cin>>ch[0];} Gauss(); //Call Gauss' algorithm to get new Po values //determine the maximum error error=fabs(X[0]); for(i=1;i<=N-1;i++){ error1=fabs(X[i]); if(error1 >= error)error = error1; } //cout<<"Max err= "<<error<<" iter="<<iter<<"Cont?(y,^c)";cin >>ch[0]; //substitute new values with Newton difference for(i=0;i<=N-1;i++)SonpD[i]=SonpD[i]+X[i]; iter=iter+1; } //End of While of error //Calculates oil flux at the lower boundary; UOD=KROD[0]/DZD*(2*PCD[0]-DZD); TSIMD=TSIMD+DTD;

191
sumSoD=0.0; //updates the values for new calculations for (i=0;i<=N-1;i++){ //if(SonpD[i]>1.0)SonpD[i]=1.0; SonD[i]=SonpD[i]; sumSoD=sumSoD+SonpD[i]; } sumSoD=sumSoD/N; //average oil saturation //print each iprint and goes to new calculations for the next //time step if(ip == iprint){ //cout<<" TSIMD="<<TSIMD<<" iter="<<iter<<" Cont?(y,^c)";cin >>ch[0]; for (i=0;i<=N-1;i++){cout<<" "<<SonpD[i];writefile<<" "<<SonpD[i];} //for (i=0;i<=N-1;i++){cout<<" "<<KROD[i];writefile<<" "<<KROD[i];} //cout<<endl; writefile<<endl; //cout<<" "<<UOD*(-1.0)<<endl;//flux at the low outer //boundary calculated explicit //writefile <<UOD*(-1.0)<<endl;//output to a file //cout<<" "<<PCD[0]<<endl;//Derivative of capillary //pressure at the end //writefile <<PCD[0]/DZD<<endl;//Derivative of capillary //pressure at the end //cout<<" "<<sumSoD<<endl;//average oil saturation //writefile <<sumSoD<<endl;//average oil saturation //cout<<" "<<KROD[0]<<endl;//kroD (Last cell)calculated //explicit after calc //writefile<<" "<<KROD[0]<<endl;//kroD (Last //cell)calculated explicitly after calc ip=0; } } //End of while of TsimD } //End of SolveIMPLI // Main program void main() { //ofstream writefile("exit.dat",ios::out); ReadInput(); Allocate(); Initialize();

192
SolveIMPLI(); }
G.2 ECLIPSE DATA FILE FOR 1D GRAVITY DRAINAGE RUNSPEC TITLE 1D Vertical Gravity Drainage -- NX NY NZ CELLS DIMENS 1 1 22 / OIL WATER GAS DISGAS LAB EQLDIMS 1 100 10 1 1 / TABDIMS 2 1 32 12 1 12 / WELLDIMS 2 1 1 10 / START 01 'JAN' 1982 / FMTOUT FMTIN UNIFOUT UNIFIN GRID ======================================== -- ARRAY VALUE------- BOX ------ EQUALS 'DX' 15.0 1 1 1 1 1 1 / 'DY' 15.0 / 'DZ' 00.1 / 'PORO' 1. / 'PERMX' 5000 / 'PERMY' 5000 / 'PERMZ' 5000 / 'DX' 15.0 1 1 1 1 2 21 / 'DY' 15.0 / 'DZ' 15.0 / 'PORO' 0.06 / 'PERMX' 0.2 / 'PERMY' 0.2 / 'PERMZ' 0.2 / 'DX' 15.0 1 1 1 1 22 22 / 'DY' 15.0 / 'DZ' 00.1 /

193
'PORO' 1. / 'PERMX' 5000 / 'PERMY' 5000 / 'PERMZ' 5000 / 'TOPS' 119999.9 1 1 1 1 1 1/ / EQUALS IS TERMINATED BY A NULL RECORD -- DXY Z KX Y Z MX Y Z POR NG T PV H TX TY TZ RPTGRID 1 1 1 1 1 1 0 0 0 1 0 1 1 1 1 1 1 / PROPS ======================================= -- SWAT KRW PCOW SWFN 0.15 0 0 1.0 0.00001 0 / 0.0000 0 0 1.0 0.00001 0 / -- SGAS KRG PCOG SGFN 0.000 0.000 0.000 0.020 0.0006 0.0000 0.040 0.0025 0.0000 0.060 0.0057 0.0000 0.080 0.0101 0.0002 0.100 0.0158 0.0007 0.120 0.0228 0.0022 0.140 0.0310 0.0054 0.160 0.0405 0.0121 0.180 0.0512 0.0246 0.200 0.0632 0.0462 0.220 0.0765 0.0819 0.230 0.0836 0.1070 0.240 0.0910 0.1381 0.2565 0.1039 0.2055 0.450 0.3200 6.0000 / 0.00 0.0 0.0 1.00 1.0 0.0 / -- SOIL KROW KROG SOF3 0.4000 0.0000 0.0000 0.5935 0.0796 0.0796 0.610 0.1016 0.1016 0.620 0.1169 0.1169 0.630 0.1335 0.1335 0.650 0.1715 0.1715 0.670 0.2160 0.2160

194
0.690 0.2676 0.2676 0.710 0.3269 0.3269 0.730 0.3944 0.3944 0.750 0.4705 0.4705 0.770 0.5559 0.5559 0.790 0.6510 0.6510 0.810 0.7563 0.7563 0.830 0.8725 0.8725 0.850 1.0000 1.0000 / 0.00 0.00 0.00 1.00 1.00 1.00 / -- PVT PROPERTIES OF WATER -- REF. PRES. REF. FVF COMPRES REF VISC VISCOS PVTW 1.000 1.029 45.998D-6 1.00 0 / -- REF. PRES COMPRESS ROCK 1.000 44.087D-6 / -- OIL WATER GAS DENSITY 0.93 1.000 0.0015 / -- PGAS BGAS VISGAS PVDG 13.609 0.0849 0.010 81.655 0.0138 0.015 95.264 0.0118 0.016 108.874 0.0102 0.017 136.092 0.0081 0.019 / -- RS POIL FVFO VISO PVTO 21.37 13.61 1.15 5.23 / 69.81 108.87 1.28 2.68 / 76.05 122.48 1.29 2.55 / 82.81 136.09 1.31 2.40 / 87.62 145.96 1.32 2.32 204.14 1.31 2.50 / / RPTPROPS 1 1 1 0 1 1 1 1 / REGIONS ===================================== SATNUM 1*2 20*1 1*2 / SOLUTION ==================================== -- DATUM DATUM OWC OWC GOC GOC RSVD RVVD

195
-- DEPTH PRESS DEPTH PCOW DEPTH PCOG TABLE TABLE EQUIL 120000 80.0 150000 0 120000 0.000000 1 0 0 / -- DEPTH RS RSVD 50000 56.0000 150000 56.0000 / RPTSOL 1 11*1 / SUMMARY ===================================== RUNSUM EXCEL FOPR FOPT BOSAT 1 1 1 1 1 2 1 1 3 1 1 4 1 1 5 1 1 6 1 1 7 1 1 8 1 1 9 1 1 10 1 1 11 1 1 12 1 1 13 1 1 14 1 1 15 1 1 16 1 1 17 1 1 18 1 1 19 1 1 20 1 1 21 1 1 22 /OIL SATURATION SCHEDULE =================================== -- 5 10 15 RPTSCHED 1 1 1 1 1 0 0 0 1 0 0 2 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 / RPTSCHED 'POTO' /
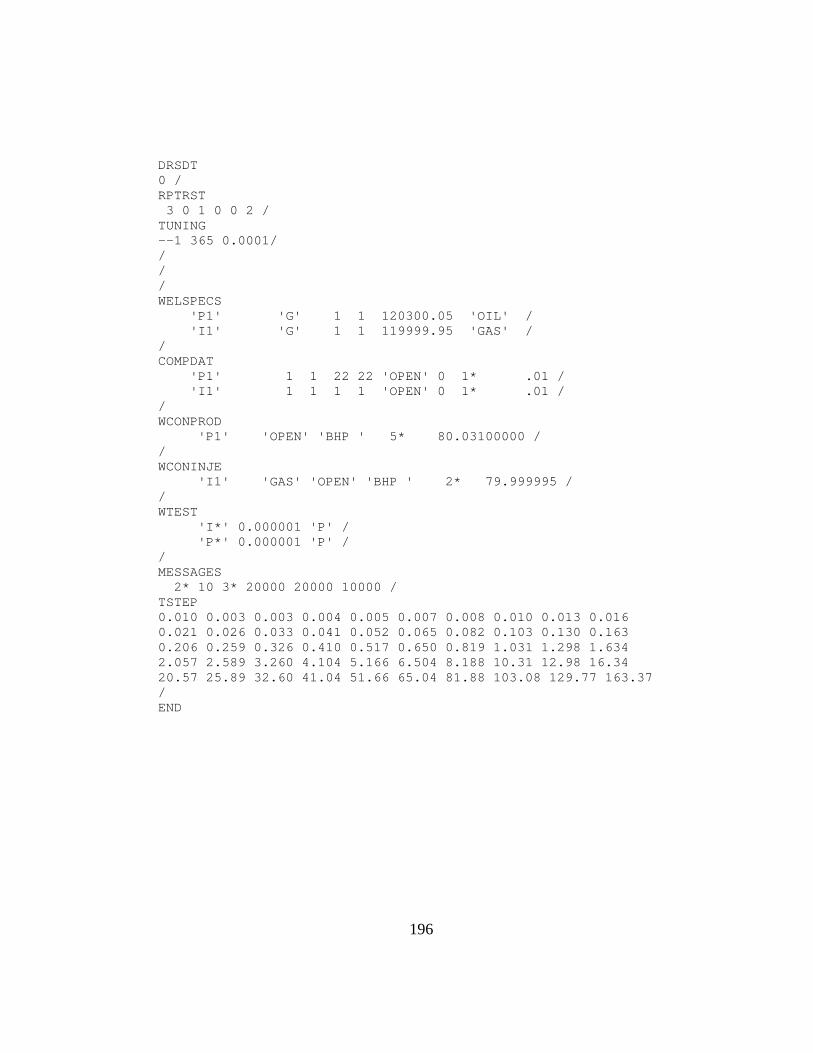
196
DRSDT 0 / RPTRST 3 0 1 0 0 2 / TUNING --1 365 0.0001/ / / / WELSPECS 'P1' 'G' 1 1 120300.05 'OIL' / 'I1' 'G' 1 1 119999.95 'GAS' / / COMPDAT 'P1' 1 1 22 22 'OPEN' 0 1* .01 / 'I1' 1 1 1 1 'OPEN' 0 1* .01 / / WCONPROD 'P1' 'OPEN' 'BHP ' 5* 80.03100000 / / WCONINJE 'I1' 'GAS' 'OPEN' 'BHP ' 2* 79.999995 / / WTEST 'I*' 0.000001 'P' / 'P*' 0.000001 'P' / / MESSAGES 2* 10 3* 20000 20000 10000 / TSTEP 0.010 0.003 0.003 0.004 0.005 0.007 0.008 0.010 0.013 0.016 0.021 0.026 0.033 0.041 0.052 0.065 0.082 0.103 0.130 0.163 0.206 0.259 0.326 0.410 0.517 0.650 0.819 1.031 1.298 1.634 2.057 2.589 3.260 4.104 5.166 6.504 8.188 10.31 12.98 16.34 20.57 25.89 32.60 41.04 51.66 65.04 81.88 103.08 129.77 163.37 / END

197
Nomenclature
τ = transfer function, 1/sec
k = matrix permeability, Darcy
µ = viscosity, cp
p = pressure, atm
Φ = potential, atm
σ = shape factor, cm-2
mV = volume of matrix block, cm3
V = total bulk volume, cm3
αrk = relative permeability of phase α , fraction
B = formation volume factor, cm3/scm3
u = flux, cm/sec
ρ = density, gm/cm3
cP = capillary pressure, atm
µ = viscosity, cp
g = gravitational acceleration, cm/sec2
cg = gravitational units conversion constant, 1.0133x106
(dyne/cm2)/atm
S = saturation, fraction
αC = component concentration in phase α , gm/gm
u = flux, sec/cm
z = coordinate in vertical direction (positive upwards)

198
φ = porosity, fraction
ρ∆ = go ρρ − , 3/ cmgm
λ = mobility, cpcmscm // 33
gfDS = fractional volume of movable gas phase in the fracture
gmDS = fractional volume of movable gas phase in the matrix
oDS = dimensionless oil saturation
q = flow rate, cm3/sec
bV = bulk volume of matrix block, cm3
h = height of matrix block, cm
x∆ = dimension of the matrix-fracture block in the x direction, cm
y∆ = dimension of the matrix-fracture block in the y direction, cm
z∆ = dimension of the matrix-fracture block in the z direction, cm
pce = capillary pressure exponent for the Corey type equation
oe = oil relative permeability exponent for the Corey type equation 0rok = end point oil relative permeability
vQ = viscous flow coefficient (matching parameter)
cQ = capillary flow coefficient (matching parameter)
gQ = gravity flow coefficient (matching parameter)
SUBSCRIPTS
o = oil
g = gas
w = water

199
r = relative (also residual)
m = matrix
f = fracture
α = fluid phase
D = dimensionless
min = minimum
i = initial
T = top of matrix
B = bottom of matrix
I = gas-oil interface
c = capillary
oo = oil-to-oil
go = gas-oil
ow = oil-water
SUPERSCRIPTS
* = pseudo
+ = positive face of matrix fracture block
- = negative face of matrix fracture block

200
References
Barkve, T. and A. Firoozabadi: “Analysis of Reinfiltration in Fractured Porous Media,” paper SPE 24900 presented at the 1992 Annual Technical Conference and Exhibition of the Society of Petroleum Engineers, Washington, D.C., Oct. 4-7.
Bech, N., O.K. Jensen, and B. Nielsen: “Modeling of Gravity-Imbibition and Gravity-Drainage Processes: Analytic and Numerical Solutions,” paper SPE 18428 presented at the 1989 Society of Petroleum Engineers Symposium on Reservoir Simulation, Houston, TX, Feb. 6-8.
Beckner, B.L., A. Firoozabadi, and K. Aziz: “Modeling Transverse Imbibition in Double-Porosity Simulators,” paper SPE 17414 presented at the 1988 Society of Petroleum Engineers California Regional Meeting, Long Beach, CA, Mar. 23-25.
Beckner, B.L., K. Ishimoto, S. Yamaguchi, A. Firoozabadi, and K. Aziz: “Imbibition-Dominated Matrix-Fracture Fluid Transfer in Dual Porosity Simulators,” paper SPE 16981 presented at the 1987 Annual Technical Conference and Exhibition of the Society of Petroleum Engineers, Dallas, TX, Sep. 27-30.
Barker, J. W. and S. Thibeau: “A Critical Review of the Use of Pseudo Relative Permeabilities for Upscaling,” paper SPE 35491 presented at the 1996 European 3-D Reservoir Modelling Conference, Stavanger, Norway, Apr. 16-17.
Cao, H. and K. Aziz: “Evaluation of Pseudo Functions,” paper SPE 54589 presented at the 1999 Society of Petroleum Engineers Western Regional Meeting, Anchorage, Alaska, May. 26-28.
Cardwell Jr., W.T., and R.L. Parsons: “Gravity Drainage Theory,” Trans. AIME (1949) 179, 199-215.
Chen, J., M.A. Miller, and K. Sepehrnoori: “Comparisons of Counter-Current Imbibition Transfer Functions in Dual Porosity Models of Naturally Fractured Reservoirs,” In Situ (1991) 15(2), 115-147.

201
Dykstra, H.: “The Prediction of Oil Recovery by Gravity Drainage,” paper SPE 6548 presented at the 1977 Society of Petroleum Engineers California Regional Meeting, Bakersfield, CA, Apr. 13-15.
Firoozabadi, A.: ”Some Recovery Issues of Immiscible and Miscible Gas-Oil Flow in Fractured Reservoirs: Laboratory Data and Theoretical Analysis,” paper presented at the first 1993 INOC-TRC International Symposium on Carbonate Rocks - Hydrocarbon Exploration and Reservoir Characterization, Chiba, Japan, Mar. 1-5.
Firoozabadi, A. and T. Markeset: “Fracture-Liquid Transmissibility in Fractured Porous Media,” paper SPE 24919 presented at the 1992 Society of Petroleum Engineers Annual Technical Conference and Exhibition, Washington, DC, Oct. 4-7.
Gilman, J.R.: “An Efficient Finite-Difference Method for Simulating Phase Segregation in the Matrix Blocks in Double-Porosity Reservoirs,” paper SPE 12271 presented at the 1983 Society of Petroleum Engineers Reservoir Simulation Symposium, San Francisco, CA, Nov. 15-18.
Gilman, J.R. and H. Kazemi: “Author’s Reply to Discussion of Improved Calculations for Viscous and Gravity Displacement in Matrix Blocks in Dual-Porosity Simulators,” J. Pet. Tech. (Jun. 1988) 783.
Gilman, J.R. and H. Kazemi: “Improved Calculations for Viscous and Gravity Displacement in Matrix Blocks in Dual-Porosity Simulators,” paper SPE 16010 presented at the 1987 Society of Petroleum Engineers Symposium on Reservoir Simulation, San Antonio, TX, Feb. 1-4.
Hagoort, J.: “Oil Recovery by Gravity Drainage,” paper SPE 7424 presented at the 1978 Society of Petroleum Engineers Technical Conference and Exhibition, Houston, TX, Oct. 1-3.
Ishimoto, K.: “Improved Matrix, Fracture Fluid Transfer Function in Dual Porosity Models,” paper SPE 17599 presented at the 1988 Society of Petroleum Engineers International Meeting on Petroleum Engineering, Tianjin, China, Nov. 1-4.
Kazemi H., L.S. Merrill, Jr., K.L. Porterfield, P.R. Zeman: “Numerical Simulation of Water-Oil Flow in Naturally Fractured Reservoirs,” paper SPE 5719 presented at the 1976 Society of Petroleum Engineers Fourth Symposium on Numerical Simulation of Reservoir Performance, Los Angeles, CA, Feb. 19-20.

202
Litvak, B.L.: “Simulation and Characterization of Naturally Fractured Reservoirs,” Proceedings of the 1985 Reservoir Characterization Technical Conference, Dallas, TX, Apr. 29-May 1, 1985. (Published in Reservoir Characterization Series, 1986, 1, 561-584, Academic Press Inc.)
Lewis, J. O.: “Gravity Drainage in Oil Fields,” Trans. AIME (1944) 155, 133-154.
Pruess, K. and T.N. Narasimham: “A practical Method for Modeling Fluid and Heat Flow in Fractured Porous Media,” Soc. Pet. Eng. J. (1985) 25, 14.
Quandalle, P. and J.C. Sabathier: “Typical Features of a Multipurpose Reservoir Simulator,” paper SPE 16007 presented at the 1987 Society of Petroleum Engineers Symposium on Reservoir Simulation, San Antonio, TX, Feb. 1-4.
Rossen, R.H., E.I.C. Shen: “Simulation of Gas/Oil Drainage and Water/Oil Imbibition in Naturally Fractured Reservoirs,” paper SPE 16982 presented at the 1987 Society of Petroleum Engineers Annual Technical Conference and Exhibition, Dallas, TX, Sept. 27-30.
Rossen, W.R. and A.T.A. Kumar: “Effect of Fracture Relative Permeabilities on Performance of Naturally Fractured Reservoirs,” paper SPE 28700 presented at the 1994 International Petroleum Conference and Exhibition of Mexico, Veracruz, Mexico, Oct. 10-13.
Sabathier, J.C.: “Discussion of Improved Calculations for Viscous and Gravity Displacement in Matrix Blocks in Dual-Porosity Simulators,” paper SPE 17851.
Sanchez, B.J.L.: ”Scaling Parameters for Characterizing Waterflood Recovery from Anisotropic Matrix Blocks in Naturally Fractured Reservoirs,” PhD dissertation, U. of Texas, Austin, TX (1996).
Shi, J.-X. and W.R. Rossen: “Simulation of Gravity Override in Foam Processes in Porous Media,” paper SPE 35166 presented at the 1996 Society of Petroleum Engineers Permian Basin Oil and Gas Conference, Midland, TX, Mar. 27-29.
Sonier, F.: “Discussion of Improved Calculations for Viscous and Gravity Displacement in Matrix Blocks in Dual-Porosity Simulators,” J. Pet. Tech. (Jun. 1988) 784.

203
Sonier, F., P. Souillard, and F.T. Blaskovich: “Numerical Simulation of Naturally Fractured Reservoirs,” paper SPE 15627 presented at the 1986 Annual Technical Conference and Exhibition of the Society of Petroleum Engineers, New Orleans, LA, Oct. 5-8.
Spivak, A.: “Gravity Segregation in Two-Phase Displacement Processes,” paper SPE 4630 presented at the 1973 Society of Petroleum Engineers Annual Fall Meeting, Las Vegas, Nev., Sept. 30-Oct. 3.
Taggart, I.J., E. Soedarmo, and L. Paterson: “Limitations in The Use of Pseudofunctions for Up-Scaling Reservoir Simulation Models,” paper SPE 29126 presented at the 1995 Society of Petroleum Engineers Symposium on Reservoir Simulation, San Antonio, TX, Feb. 12-15.
Thomas L.K., T.N. Dixon, and R.G. Pierson: “Fractured Reservoir Simulation,” paper SPE 9305 presented at the 1980 Society of Petroleum Engineers Annual Technical Conference and Exhibition, Dallas, TX, Sept. 21-24.

204
Vita
Nemesio Miguel-Hernández was born in Yanhuitlán, Oaxaca, México on
October 31, 1961, the son of Micaela Hernández Cruz and Pablo Miguel
Gutiérrez. After completing his work at Centro Tecnológico Agropecuario No. 51
in Yanhuitán, Oaxaca, México in 1979 he entered Instituto Politécnico Nacional
in México D.F., where he received the degree of Ingeniero Petrolero in 1985.
During 1985 and 1986 he worked for the Instituto Mexicano del Petroleo, and in
1986 he started to work for PEMEX. In 1992 he received the degree of Maestro
en Ingenieria Petrolera at the Universidad Nacional Autónoma de México in
México D.F., in 1997 he received the Lázaro Cárdenas medal given by the
Asociación de Ingenieros Petroleros de México. In January 1998 he entered the
Graduate School of the University of Texas at Austin.
Permanent address: Av. Nardos Manzana 18 casa 23
Fraccionamiento San Manuel
Cd. Del Carmen, Campeche, México. C.P. 24118
This dissertation was typed by the author.