Embed Size (px)
Citation preview

Copyright
by
Ashley Jean Hicks
2015

The Thesis Committee for Ashley Jean HicksCertifies that this is the approved version of the following thesis:
Design and Testing of Sub-wavelength Panels for
Underwater Acoustic Isolation
APPROVED BY
SUPERVISING COMMITTEE:
Preston S. Wilson, Supervisor
Michael R. Haberman, Co-Supervisor

Design and Testing of Sub-wavelength Panels for
Underwater Acoustic Isolation
by
Ashley Jean Hicks, B.S.
THESIS
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
MASTER OF SCIENCE IN ENGINEERING
THE UNIVERSITY OF TEXAS AT AUSTIN
August 2015

Dedicated with love to David Johnson (1945–1998),
Anna Jean Oakleaf (1925–1998), and Charles Oakleaf (1913–2013).

Acknowledgments
First, many thanks are due to my advisors, Dr. Preston S. Wilson and
Dr. Michael R. Haberman. Their guidance is much appreciated and their
patience even more so. Additionally, I would like to acknowledge the Office
of Naval Research, who provided the Applied Research Laboratories and The
University of Texas at Austin with the funding necessary to pay the bills while
I, like a child in a great sandbox, explored scientific possibility. Special thanks
to Dr. William V. Slaton, mentor and friend, without whom I would have
never been where I am today. To my family, who supported my graduate
school decisions and helped in anyway they could, thank you. To my friends,
especially Jerrod Ward, who answered late night pleas and cries of frustration
with laughter and more than a few beers, thank you. I couldn’t have done it
without you all, and I am eternally grateful. Live well, pray often, and travel
far.
v

Design and Testing of Sub-wavelength Panels for
Underwater Acoustic Isolation
Ashley Jean Hicks, M.S.E.
The University of Texas at Austin, 2015
Supervisors: Preston S. WilsonMichael R. Haberman
Underwater sound isolation is an important area of research for both
environmental and military applications. This work explores present research
in airborne thin panel acoustic metamaterials and underwater acoustic isola-
tion using encapsulated bubbles. These ideas are combined in the design of
sub-wavelength, free-standing underwater panels for acoustic isolation. This
work investigates the resonance of cylindrical air cavities in water with flat
aspect ratios. The spherical resonance approximation proposed by Minnaert
for gas bubbles in water is shown to provide a good approximation of the res-
onance frequency of cylindrical inclusions. Panels with cylindrical inclusions
are developed and tested in the 500 Hz to 1.3 kHz range and the 2 kHz to
5 kHz range. Panels with a void fraction of 1.3% and non-dimensional kT
value of 0.02 to 0.07 show a frequency averaged insertion loss of 3 dB to 8 dB.
Additionally, it is shown that an increase in void fraction yields an increase in
panel isolation capability. It is the hope that this and future work in the area
vi

of sub-wavelength panels will improve the underwater environment for marine
life and underwater naval applications.
vii

Table of Contents
Acknowledgments v
Abstract vi
List of Tables xi
List of Figures xii
Chapter 1. Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Bubbles as Isolators . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Acoustic Metamaterials . . . . . . . . . . . . . . . . . . 5
1.2.3 Development of Void-Filled Panel Isolators . . . . . . . 8
1.3 Objective and Thesis Roadmap . . . . . . . . . . . . . . . . . 9
Chapter 2. Modeling and Measurement of a Unit Cell 12
2.1 The Minnaert Resonance of Bubbles . . . . . . . . . . . . . . . 12
2.1.1 Minnaert Resonance . . . . . . . . . . . . . . . . . . . . 13
2.1.2 Approximation of a Sphere as an Equal-Volume Cylinder 18
2.2 Measurements of Cylindrical Inclusions . . . . . . . . . . . . . 19
2.2.1 Unit Cell Construction . . . . . . . . . . . . . . . . . . 19
2.2.2 Experimental Apparatus and Data Analysis . . . . . . . 22
2.2.3 Results of Unit Cell Experiments . . . . . . . . . . . . . 24
2.3 Finite Element Analysis of Cylindrical Inclusion . . . . . . . . 29
2.3.1 Development of Model . . . . . . . . . . . . . . . . . . . 29
2.3.2 Model Analysis and Results . . . . . . . . . . . . . . . . 32
2.4 Model Comparisons . . . . . . . . . . . . . . . . . . . . . . . . 37
viii

Chapter 3. Measurement of Panel Performance 40
3.1 Panel Construction . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Experimental Design . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.1 High Frequency (2 kHz to 5 kHz) Tank Experiments . . 42
3.2.2 Low Frequency (500 Hz to 1.3 kHz) Tank Experiments . 45
3.2.3 Post-Processing of Data . . . . . . . . . . . . . . . . . . 47
3.3 High Frequency (2 kHz to 5 kHz) Panels . . . . . . . . . . . . 48
3.3.1 Effect of Voids . . . . . . . . . . . . . . . . . . . . . . . 49
3.3.2 Effect of Void Fraction . . . . . . . . . . . . . . . . . . . 50
3.3.3 Effect of Using 3-D Printed Components . . . . . . . . . 54
3.4 Low Frequency (500 Hz to 1.3 kHz) Panels . . . . . . . . . . . 62
3.4.1 Effect of Voids . . . . . . . . . . . . . . . . . . . . . . . 63
3.4.2 Mean Insertion Loss . . . . . . . . . . . . . . . . . . . . 68
3.5 Finite Element Analysis of 2 kHz to 5 kHz Panel . . . . . . . . 69
3.5.1 Development of Model . . . . . . . . . . . . . . . . . . . 69
3.5.2 Model Analysis and Results . . . . . . . . . . . . . . . . 71
Chapter 4. Conclusions 74
4.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Appendices 80
Appendix A. MATLAB Code for Data Analysis 81
A.1 Unit Cell - Experimental Results . . . . . . . . . . . . . . . . . 81
A.2 Unit Cell - Finite Element Analysis Results . . . . . . . . . . . 82
A.3 Panel Isolation - Experimental Results . . . . . . . . . . . . . 82
A.3.1 Transfer Function Graphs . . . . . . . . . . . . . . . . . 83
A.3.2 Insertion Loss Calculation . . . . . . . . . . . . . . . . . 83
Appendix B. Analytical Model of Unit Cell 84
B.1 Equivalent Circuit Impedance . . . . . . . . . . . . . . . . . . 84
B.2 Results and Discussion . . . . . . . . . . . . . . . . . . . . . . 89
B.3 Effect of Membranes and Aspect Ratios . . . . . . . . . . . . . 92
B.4 MATLAB Code . . . . . . . . . . . . . . . . . . . . . . . . . . 96
ix

Bibliography 98
Vita 106
x

List of Tables
2.1 Dimensions and expected Minnaert resonance, denoted as f0,of cylindrical inclusions in POM unit cells with a thickness of t= 6.35 mm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2 Material properties used in COMSOL Multiphysics finite ele-ment analysis. . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
B.1 Resonance results from the input impedance as determined bythe circuit model above. Inclusion dimensions are taken fromChapter 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
B.2 Resonance results from the input impedance as determined bythe circuit model without the membrane present. . . . . . . . 92
B.3 Resonance results from the input impedance as determined bythe circuit model of a unit cell with a modified aspect ratio forthe thickness of the Delrin, both with and without a membranepresent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
B.4 Resonance results from the input impedance as determined bythe circuit model of a unit cell with a modified aspect ratio forthe thickness of the Delrin and the thickness of the membrane. 95
xi

List of Figures
1.1 Encapsulated bubble array surrounding a cylindrical sound source.Figure adapted from Ref. [14]. . . . . . . . . . . . . . . . . . . 4
1.2 Concept of a thin-panel isolator with cylindrical air inclusionsencapsulated by two non-perforated elastic layers. . . . . . . . 8
2.1 A bubble of radius R0 undergoing low-amplitude linear oscilla-tions of amplitude Rε0 surrounded by spherical shells of liquid.Figure adapted from Ref. [8]. . . . . . . . . . . . . . . . . . . 14
2.2 A spherical bubble with radius R0 and an equal volume cylin-drical inclusion of radius a and thickness t. . . . . . . . . . . . 18
2.3 A unit cell made of POM plastic with thickness t has a cylin-drical inclusion with radius a in the center. . . . . . . . . . . . 20
2.4 A sheet of POM plastic of thickness t sandwiched between twoneoprene rubber layers which trap air inside of a cylindricalinclusion of radius a creating a unit cell of thickness T. . . . . 21
2.5 Experimental setup to measure the resonance frequency of aunit cell in a cylindrical tank with diameter D and height H. . 22
2.6 Frequency response of the steel tank. . . . . . . . . . . . . . . 24
2.7 Results of the 100 Hz unit cell measurement showing (a) Ptotal
and Ptank and (b) Pbubble. . . . . . . . . . . . . . . . . . . . . . 25
2.8 Results of the 200 Hz unit cell measurement showing (a) Ptotal
and Ptank and (b) Pbubble. . . . . . . . . . . . . . . . . . . . . . 26
2.9 Results of the 500 Hz unit cell measurement showing (a) Ptotal
and Ptank and (b) Pbubble. . . . . . . . . . . . . . . . . . . . . . 27
2.10 Results of the 800 Hz unit cell measurement showing (a) Ptotal
and Ptank and (b) Pbubble. . . . . . . . . . . . . . . . . . . . . . 28
2.11 Schematics of COMSOL geometries used to model the system. 31
2.12 Velocity response of the unit cell designed with a Minnaert fre-quency of 100 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.13 Velocity response of the unit cell designed with a Minnaert fre-quency of 200 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . 34
xii

2.14 Velocity response of the unit cell designed with a Minnaert fre-quency of 500 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.15 Velocity response of the unit cell designed with a Minnaert fre-quency of 800 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.16 Comparison of the Minnaert model of resonance frequency withexperimental data and FEA results for the unit cell. . . . . . . 38
3.1 Schematic showing the air filled inclusion, a panel with air filledinclusions, and a five-sided box created from the isolating panels. 41
3.2 An acrylic tank with 0.37 m deep water was used for high fre-quency experiments. . . . . . . . . . . . . . . . . . . . . . . . 43
3.3 Location of the source (S ) and receiver (R) in the high frequencytank experiment. . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4 A photograph of the void-filled cube in place during an experi-ment, showing the cube suspended around the source from theshaker plate (A) and the cube’s upward-facing side (B) on theair-water interface. . . . . . . . . . . . . . . . . . . . . . . . . 45
3.5 Tank described in Section 2.2 with shaker and cube suspendedfrom a plate above the tank. . . . . . . . . . . . . . . . . . . . 46
3.6 Low frequency cube during an experiment showing the hook andplate (A) used to suspend the shaker and the cube suspendedon mono-filament such that the upward-facing side (B) is at theair-water interface. . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7 Cubes created from high frequency panels. From (L) to (R):Plain case, perforated case, void-filled case. . . . . . . . . . . . 49
3.8 Isolation effect of panels with and without air-filled inclusionson the frequency response of the tank. . . . . . . . . . . . . . 50
3.9 Isolation effect of panels with varying void fraction on the fre-quency response of the tank. . . . . . . . . . . . . . . . . . . . 52
3.10 Mean insertion loss across specified frequency bands for panelswith varying void fraction. . . . . . . . . . . . . . . . . . . . . 53
3.11 Mean insertion loss of the panel as a function of void fractionacross the entirety of the frequency range. . . . . . . . . . . . 54
3.12 Example of a solid cylinder created on a 3D printer. The interiorhexagonal structure is called in-fill. Image courtesy of MakerBot. 55
3.13 Two 3D printed pieces with high in-fill (a) and low in-fill (b)percentage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.14 Isolation effect of panels with varying in-fill percentages. . . . 58
xiii

3.15 Mean insertion loss across specified frequency bands for a panelmade with PLA plastic center layer of varying in-fill percentage. 59
3.16 Effect of in-fill percentage of a PLA panel on insertion loss forspecified frequency bands. . . . . . . . . . . . . . . . . . . . . 60
3.17 Mean insertion loss of the panel as a function of void fractionfor Delrin plastic and PLA plastic center layers. . . . . . . . . 61
3.18 Cubes created from low frequency panels. From (L) to (R):Plain case, perforated case, void-filled case. . . . . . . . . . . . 63
3.19 Isolation effect for panels designed to operate from 500 Hz to1.3 kHz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.20 Isolation effect of the low frequency panel from 150 Hz to 350 Hz. 64
3.21 Isolation effect of the low frequency panel from 350 Hz to 500 Hz. 65
3.22 Isolation effect of the low frequency panel from 500 Hz to 650 Hz. 66
3.23 Isolation effect of the low frequency panel from 650 Hz to 800 Hz. 66
3.24 Isolation effect of the low frequency panel from 800 Hz to 1 kHz. 67
3.25 Isolation effect of the low frequency panel from 1 kHz to 1.3 kHz. 67
3.26 Mean insertion loss as a function of frequency for panels de-signed to operate from 500 Hz to 1.3 kHz. . . . . . . . . . . . 68
3.27 3D COMSOL geometry used to model the thin-panel system. . 70
3.28 Results finite element analysis of radiated sound power in thepanel system. . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
B.1 Schematic of the unit cell described in Chapter 2. . . . . . . . 84
B.2 Completed equivalent circuit of the unit cell. . . . . . . . . . . 85
B.3 Simplified circuit model with impedances listed instead of indi-vidual components. . . . . . . . . . . . . . . . . . . . . . . . . 86
B.4 Final simplified circuit model used to determine the input impedance. 88
B.5 Results of circuit model analysis for the 100 Hz unit cell. . . . 89
B.6 Velocity information for the 100 Hz unit cell. . . . . . . . . . . 90
xiv

Chapter 1
Introduction
1.1 Motivation
The isolation of underwater acoustic noise is of growing concern world-
wide. The military has obvious interest in isolating sounds from underwater
vehicles and SONAR devices. Environmental concerns keep scientists search-
ing for new methods of acoustic abatement. Many sources of noise in the
ocean are anthropogenic and have the possibility of interfering with the bi-
ological systems in the environment [1]. Low frequency noises are the most
pervasive as high frequency noise sources tend to decay more quickly in the
underwater environment.
Prominent sources of underwater sound are industrial, like oil drilling
and pile driving [2]. Pile driving hammers generate impulsive noise in primarily
the 20 Hz to 1 kHz band [3]. Marine wind turbines radiate a continuous noise
in the 60 Hz to 300 Hz band [2]. Popper has published several works [1, 4]
that give a review of and estimate the impact anthropogenic noise has on the
surrounding environment and marine life. Developing methods of underwater
isolation at these frequencies would be of great benefit to the environment.
There is also a military interest in isolating the motor noise of ships
1

and submarines. The development of isolation materials for the appropriate
frequency ranges could help increase the acoustic stealth of underwater mil-
itary vehicles. Additionally, there is a commercial gain in the development
of materials that isolate motorized watercraft noise. A standard small boat
engine will produce a continuous noise in the 1 kHz to 5 kHz range [2]. Out-
board motor noise disturbs and deters collections of fish in the underwater
environment [5]. Motorized watercraft have also been shown to significantly
effect the aquatic environment [6]. The development of an isolation material
that reduces outboard motor noise would be very beneficial to fishermen and
recreational water users alike.
All of the above examples illustrate the need for a simple, effective
underwater acoustic isolator. This thesis therefore seeks to design an effective
underwater acoustic isolator of minimal thickness. A deeply sub-wavelength
panel has the additional benefit of isolating acoustic noise while minimizing
its obtrusiveness in the environment as well as minimizing its manufacturing
and installation costs.
1.2 Background
This work seeks to develop an underwater acoustic isolating panel by
combining two different branches of current acoustic research: the use of bub-
bles as isolators and attenuators and the development of acoustic metama-
terials with resonant inclusions. Additional influence was drawn from the
Alberich anti-reflection submarine coatings developed in World War II and
2

resonant bubbles in elastic media. This section will provide a brief review of
current and past work on these topics and discuss how previous work informed
the research presented in this thesis.
1.2.1 Bubbles as Isolators
It has long been known that the presence of bubbles in an underwater
environment drastically alters the acoustical properties of the environment.
Several models exist to describe the behavior of individual bubbles in a liquid
environment [7, 8] and the acoustic behavior of bubbly liquids [9, 10]. The pres-
ence of a resonant bubble in a system can assist in removing energy from the
system, thus acting as an attenuator for an acoustic wave. Waves propagat-
ing through bubbly liquid experience dispersion (frequency dependent sound
speed) and attenuation, both of which are maximized near the individual bub-
ble resonance frequency. This dispersive behavior has been quantified in prop-
agation models for free bubbles [9] and for bubbles with solid elastic shells
[11]. A propagation model that captures the effect of encapsulated bubbles on
overall acoustic wave dispersion and attenuation has also been developed [12].
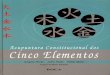
This review will focus on two types of underwater isolators that use bub-
bles to attenuate sound. The first is the encapsulated bubble array developed
by Lee et al. [12–15] at The University of Texas at Austin. The encapsulated
bubbles in these systems act as simple harmonic isolators. Each individual
cell was tethered to a wire-frame or rope structure which could be made to
surround the noise source.
3

In [13], Lee et al. investigate the isolation ability of bubbles created
from latex balloons. They found that an encapsulated bubble with a radius of
approximately 5 cm successfully attenuated frequencies ranging from 50 Hz to
100 Hz. In that experiment, a single line of encapsulated bubbles were placed
inside of a cylindrical tube and the resulting change in resonance patterns
permitted the determination of the dispersion effect. In [12] and [14], encap-
sulated bubbles were attached to a frame surrounding the source as shown
in Fig. 1.1. These bubble arrays show a maximum reduction of 26 dB for
frequencies below 200 Hz.
Figure 1.1: Encapsulated bubble array surrounding a cylindrical sound source.Figure adapted from Ref. [14].
4

Lee et al. also investigated the attenuation capabilities of a freely ris-
ing bubble cloud [12]. Bubble clouds were generated by attaching perforated
hoses to a steel frame approximately 0.5 m below the sound source. Air flow
through the hoses created a freely rising cloud consisting of bubbles with an
approximate radius of 0.5 cm. The volume fraction of bubbles in the bubble
cloud, also known as the void fraction, was between 0.005 and 0.025. For fre-
quencies between 350 Hz to 1 kHz, the freely rising cloud allowed a reduction
in noise level of up to 40 dB [12].
In similar work, Wursig et al. reported the effectiveness of a bubble
curtain in reducing the noise generated by pile driving [16]. In an in situ
experiment, Wursig et al. reported a broadband reduction of 3 dB to 5 dB
and a octave band reduction of up to 10 dB in the 400 Hz to 800 Hz band and
20 dB in the 1.6 kHz to 6.4 kHz band. A bubble cloud experiment conducted
by Domenico showed that bubble clouds attenuated sound in an underwater
environment and the frequency band of attenuation was dependent on the size
and resonance frequency of the bubbles in the cloud [17].
1.2.2 Acoustic Metamaterials
Another emergent research area of acoustics is the field of acoustic
metamaterials. An acoustic metamaterial is best defined as an artificial com-
posite containing sub-wavelength structures whose dynamic effective proper-
ties are unattainable using conventional materials or composites [18]. An
AMM topic germane to the content of this work is the recent development
5

of a deeply sub-wavelength panel for sound isolation in air [19].
The panels developed in [19] had thickness T of 15 mm and a density
of 3 kg/m3 or less. In that work, each panel was constructed from an elastic
membrane stretched across a rigid plastic grid. Each unit cell in the grid had
a small weight attached to the center, creating a simple harmonic oscillator.
The panel of unit cells exhibited an internal sound transmission loss of 19.5 dB
at 200 Hz. This corresponded to a non-dimensional kT value of 0.05, where k
is the wavenumber in the host medium. Additionally, Yang et al. reported that
this panel could be stacked to obtain total reflection across a broad frequency
range [19]. A stacked panel system with thickness of 60 mm and weight of
15 kg/m3 exhibited a transmission loss of greater than 40 dB over the 50 Hz
to 1 kHz range. The kT value across the frequency range for the stacked panel
was 0.05 to 1.09.
Xiao et al. also developed a thin metamaterial-based plate of sub-
wavelength resonator arrays [18]. Their work reported that thinner plates
allowed the resonators in the panel to have a larger effect. Through a series of
numerical models, [18] showed plates with a thickness of approximately 2 mm
exhibited a transmission loss of 5 dB over the 100 Hz to 200 Hz range. This
corresponded to a kT value of 0.004 to 0.008. Additionally, Xiao et al. showed
these panels can be tuned to a specific frequency band by loading the resonant
cavities with weights.
Naify et al. experimentally measured the transmission loss of a locally
resonant metamaterial [20]. The metamaterial was a thin membrane stretched
6

over a support structure with centrally located masses. They investigated the
relationship between transmission loss and metamaterial properties. The goal
for these panel-type metamaterials was to improve on the transmission loss
given by the mass law. Ultimately, the resonant metamaterial showed a five
fold increase in transmission loss over the mass law prediction in the 100 Hz to
1 kHz range. A numerical model for characterizing thin plate acoustic metama-
terials was developed in [21]. Additionally, Li et al. highlighted the possibility
of using thin-plate acoustic metamaterials for isolating low frequency noises
and limiting underwater SONAR detection.
There are also metamaterials being developed which do not rely on
resonate effects to attenuate or isolate sound. Assour et al. reported on the
development of a 2D panel made of tungsten and silicone rubber [22]. In ex-
perimental measurements, this panel showed wave attenuation in the 650 Hz to
3.5 kHz range, tunable by adjusting the size of tungsten inserts and the thick-
ness of the silicon rubber. Christensen et al. reported a tunable metamaterial
made of a perforated material, called a double fishnet by the authors. The
material was fabricated by stacking two metal plates perforated with square
holes. Experiments showed that this double fishnet material attenuated across
a frequency range dependent upon the gap between the two fishnet layers [23].
Additionally, Klatt and Haberman developed a composite material model that
can be used to design negative stiffness metamaterials from buckled elements
[24]. These elements have the ability to be used for energy absorption over a
wide frequency bandwidth.
7

1.2.3 Development of Void-Filled Panel Isolators
One possible way to combine the insights from the research presented
in Sections 1.2.1 and 1.2.2 would be to consider the construction of a panel
with several air filled inclusions encapsulated in the center layer. Further, one
might expect these panels to have an isolation effect similar to bubbly media
[9] and tethered encapsulated bubble arrays [12–15]. Xiao et al. reported that
resonant behavior dominates for acoustically thin panels [18], specifying that
effects of localized panel resonances will clearly dominate when kT values
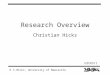
are on the order of 10−2. This work introduces a tri-layer thin panel with
cylindrical air inclusions, as shown in Fig. 1.2
Figure 1.2: Concept of a thin-panel isolator with cylindrical air inclusionsencapsulated by two non-perforated elastic layers.
A similar structure designed to attenuate sound in the ultrasonic range
was developed and modeled by Leroy et al. [25, 26]. In [25], Leroy et al. de-
signed and experimentally verified a material consisting of small cylindrical
inclusions completely surrounded by soft elastic silicon. The material was ex-
panded upon in an analytical model presented in [26]. The panel presented
in this work contains cylindrical inclusions surrounded on the radial side by
8

stiff elastic material and on the top and bottom by a thin layer of soft elastic
material. Outside of that thin elastic layer, the panel is in direct contact with
water. The primary behavior of the bubble in the panel should be similar to
the behavior of an encapsulated bubble in a water environment [12–15] rather
than a cylindrical bubble in a solid elastic environment [25, 26].
These panels also resemble a reflection reduction coating developed
for German U-boats in World War II [27]. These coatings, commonly called
Alberich coatings, had a tri-layer structure as shown in Fig. 1.2. However, the
backing layer (usually the hull of a U-boat) was used as structural support.
The acoustic effects of generalized Alberich coatings are reported in [27–32].
Unlike the materials requiring a structural backing layer, the panels proposed
here are free standing. To the author’s best knowledge, there has been no
previously published work on sub-wavelength free standing panel isolators.
The development of such a panel is the primary purpose of the thesis outlined
below.
1.3 Objective and Thesis Roadmap
Having discussed previous work in the fields of thin panel acoustic meta-
materials and underwater acoustic isolation, and having developed the concept
of a free standing sub-wavelength panel with cylindrical inclusions, this thesis
has three main objectives:
1. Present and develop simple models that can be used to design
9

sub-wavelength panels that have cylindrical air-filled inclusions.
2. Demonstrate the underwater noise abatement efficacy of thin-
panels containing cylindrical air-filled inclusions.
3. Experimentally quantify the effect of hole size, void fraction,
and fill fraction on panel isolation ability.
The first objective is met in Chapter 2. Section 2.1 describes the res-
onance of a spherical bubble and explains the process of approximating a
spherical bubble as a cylindrical inclusion. The approximation is tested exper-
imentally in Section 2.2, which presents the development and testing of several
unit cells to determine the resonance frequency of cylindrical inclusions, and
computationally in Section 2.3, which determines the resonance frequency of
a unit cell via a finite element analysis of the system. In Section 2.4, the
validity of approximation of a cylindrical inclusion as a spherical bubble is
determined by comparing the experimental data, the finite element analysis,
and the Minnaert resonance frequency.
The second and third objectives are addressed in Chapter 3. Chapter 3
explores the development and construction of sub-wavelength panels in the
2 kHz to 5 kHz range and 500 Hz to 1.3kHz range. The effect of various
panel properties including void fraction and center material on the isolation
ability of panels designed to isolate in the 2 kHz to 5 kHz range is explored
in Section 3.3. Section 3.4 explores the isolation ability of panels designed
to work in the 500 Hz to 1.3 kHz range. Additionally, Section 3.5 develops
10

a model for finite element analysis of the panel system to compliment the
experimental results.
Finally, Chapter 4 reiterates the work presented in Chapter 2 and Chap-
ter 3 and draws conclusions about the future use of sub-wavelength panels
in underwater acoustic isolation. Though the research presented here repre-
sents a significant amount of work on this novel material, there remain several
questions and possible points of exploration. Future work is highlighted in
Section 4.2.
11

Chapter 2
Modeling and Measurement of a Unit Cell
In order to facilitate the design of a complex system, it is important to
model and measure the system’s fundamental components. A major compo-
nent of the panel system described in the previous chapter is the cylindrical
air-filled inclusion. This chapter focuses on the development and sizing of
cylindrical air-filled inclusions for use in a sub-wavelength panel.
2.1 The Minnaert Resonance of Bubbles
The resonance frequency of a spherical bubble in water is widely stud-
ied. A cylindrical air-filled inclusion like the one proposed in this work will
have a different resonance frequency. As this work is dependent on the res-
onance effect of the cylindrical air-filled inclusion, it is important for design
purposes to have accurate estimates of the resonance frequency of the inclu-
sion. The goal here is a simple and convenient zeroth-order model of resonance
frequency to guide the initial design of panels. To date, several papers have
been published on the resonant behavior of non-spherical bubbles [33–37]. A
relevant recent example is provided by Calvo et al. who describe the resonance
of a single cylinder embedded in a soft elastic medium [34]. The cylindrical
12

inclusions proposed by the present work are seated in a stiff elastic medium
with a very thin soft elastic shell surrounded by water and thus are not well
described by Calvo’s model. Additionally, the cylindrical inclusions are not
exactly represented by the models presented by Geng and Oguz [35, 36], which
describe bubbles that completely fill a portion of a long cylinder of water.
Other models may more closely describe the resonant behavior of the system,
but they are numerically inconvenient [33, 37]. It will be shown that the Min-
naert model for a spherical bubble in water [7] is an effective zeroth-order
model for the cylindrical inclusions in sub-wavelength panels.
2.1.1 Minnaert Resonance
The low-amplitude oscillation of a spherical gas bubble in water was
first explored by Minnaert in 1933 [7]. Minnaert’s work treats the gas bubble
in a liquid environment as a mass on a spring and from there derives the
resonance frequency of the oscillation. This derivation, which assumes no
dissipative losses in the system and low-amplitude, uniform oscillations, is
outlined below using the method and nomenclature given in [8].
13

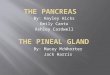
Figure 2.1: A bubble of radius R0 undergoing low-amplitude linear oscillationsof amplitude Rε0 surrounded by spherical shells of liquid. Figure adapted fromRef. [8].
To begin, consider an oscillating bubble with mean radius of R0, as
shown in Fig. 2.1. For single frequency excitation, the bubble’s wall motion
can be described as
Rε = −Rε0eiω0t. (2.1)
The bubble radius at any point in time is
R = R0 +Rε(t) = R0 −Rε0eiω0t. (2.2)
Here a negative sign is used to indicate that an increase in pressure causes
14

a decrease in overall bubble radius. In an infinite environment, the bubble
is surrounded by spherical shells of water with radius r and thickness ∆r.
Each spherical shell has a mass of 4πr2ρ∆r. The kinetic energy is found by
integrating over all of shells from the bubble wall to infinity,
ΦK =1
2
∫ ∞R
(4πr2ρdr)r2. (2.3)
The mass of liquid moving through a spherical surface around the bub-
ble at any point in time dt is given by 4πr2rρdt. If the liquid is approximated
as incompressible, then by the conservation of mass the flow at the shell can
be equated to the flow at the bubble surface,
r
R=R2
r2.
Equation (2.3) yields
ΦK = 2πR3ρR2. (2.4)
Equation (2.4) has a maximum value when the bubble is at equilibrium radius
R0. Under this condition, R = iω0Rε0eiω0t, and thus the squared magnitude
of the radial velocity is given by∣∣∣R∣∣∣2 = (ω0Rε0)2.
Radiation mass is the effective mass felt by an acoustically radiating
system, and it is dependent on the geometry of the system and the frequency
of oscillation. Normally, other inertial effects would be present in an oscil-
lating system, but for simplicity Minnaert considers only the inertial effect of
15

the oscillation. As such, the radiation mass is defined mradRF = 4πR3
0ρ. The
maximum kinetic energy can then be written
ΦK,max =1
2mrad
RF(Rε0ω0)2. (2.5)
In a loss-less simple harmonic oscillator, the maximum kinetic energy is equal
to the maximum value of potential energy [38]. Using the concept of work [8],
the maximum potential energy can be written
ΦP,max = −∫ Vmin
V0
(pg − p0)dV = −∫ R0−Rε0
R0
(pg − p0)4πr2dr. (2.6)
Assuming the gas behaves poly-tropically, that is pgVκ is a constant
where κ is the poly-tropic index, the pressure and volume at equilibrium are
equal to the pressure and volume when the bubble is at a minimum volume
giving the following expression
pg(R)3κ = p0R3κ0 . (2.7)
Utilizing the radius relationship Rε = R−R0, the pressures can be related to
the equilibrium radius and the magnitude of the radial oscillations as
pgp0
=
(1 +
Rε
R0
)−3κ. (2.8)
For small radial oscillations, Eq. (2.8) can be expanded with the binomial
expansion to yield the following linear relationship between the relevant pres-
sures, equilibrium radius, and radial motion,
p0 − pg =3κRεp0R0
. (2.9)
16

Equation (2.9) is substituted into Eq. (2.6). Using the first order approxima-
tion Rε = R - R0, the potential energy becomes
ΦP,max =
∫ Rε0
0
3κp0Rε
R0
4πR20dRε = 6πκp0R0R
2ε0. (2.10)
Equation (2.10) and Eq. (2.5) are combined to yield the resonance frequency
of the oscillating bubble,
ω0 =1
R0
√3κp0ρ
. (2.11)
In an adiabatic system with negligible surface tension, the Minnaert
resonance frequency is dependent only on the density ρ of the material, the
static pressure p0, and the adiabatic constant, or ratio of specific heats, γ,
which replaces κ in an adiabatic system. The Minnaert resonance frequency
can be written as
ωM =1
R0
√3γp0ρ
. (2.12)
As a simple rule, for a small air bubble in water under one atmosphere of
pressure, Eq. (2.12) reduces to
f0R0 ≈ 3.26 m/s. (2.13)
This form of the Minnaert resonance frequency is easy to remember
and apply. The Minnaert resonance, Eq. (2.13), is the most common reference
point for estimating the resonance frequencies of air bubbles in water, and as
shown in the subsequent sections is remarkably useful for the design of unit
cells of the present system.
17

2.1.2 Approximation of a Sphere as an Equal-Volume Cylinder
Figure 2.2: A spherical bubble with radius R0 and an equal volume cylindricalinclusion of radius a and thickness t.
As a zeroth-order model of the resonance frequency, the cylindrical air
cavity of the present work is considered as an equal volume spherical air bubble.
Equation (2.13) is used to determine the radius of a sphere with a resonance
in the desired frequency range. Assuming that the shapes have equal volume,
the sphere with radius R0 is approximated as a cylinder with radius a and
thickness t, as shown in Fig. 2.2. The volume of the spherical bubble is
Vsphere =4
3πR3
0. (2.14)
The cylindrical inclusion has volume
Vcylinder = πa2t. (2.15)
Equating Eq. (2.15) and Eq. (2.14) enforces the equivalent volume assumption
and yields
a2t =4
3R3
0. (2.16)
18

The radius of the cylindrical inclusion is
a =
√4R3
0
3t. (2.17)
Equation (2.17) requires the specification of height in the calculation
of the radius of the inclusion. For the case of the unit cells described in
Section 2.2 and Section 2.3, the value t was dictated by the thickness of the
material used in the panels, and the radius was determined using Eq. (2.17) to
tune the resonance frequency. It will be shown that panels with cylindrical air
inclusions with an aspect ratio near a/t ≈ 2.4 will have a resonance frequency
near the Minnaert resonance frequency across a broad range of frequencies.
2.2 Measurements of Cylindrical Inclusions
The effectiveness of estimating the resonance frequency of a cylindrical
inclusion using the Minnaert resonance frequency for an equal-volume spher-
ical bubble was tested by constructing a selection of individual cylindrical
inclusions, called unit cells, and measuring their resonance frequency. These
results were also compared to the results of a finite element analysis (FEA) of
the system performed in COMSOL Multiphysics and discussed in Section 2.3.
2.2.1 Unit Cell Construction
To create a unit cell, a single cylindrical hole of radius a was drilled
through of a sheet of a polyoxymethylene (POM) plastic. POM is sold under
various trade-names, including Delrin and Celcon. Delrin, manufactured and
19

sold by DuPont, was used in this work. The overall size of the sheet was
approximately twice the diameter of the cylindrical inclusion, as shown in
Fig. 2.3. Air was trapped inside of the inclusion by sandwiching the POM
sheet between two thin layers of neoprene rubber, as shown in Fig. 2.4. The
rubber was attached to the POM using DAP Weldwood, a neoprene-based
contact cement. The neoprene sheets were attached under enough tension to
remove any air pockets and hold the sheet flat. No additional tension was
applied to the membrane for the creation of these unit cells.
Figure 2.3: A unit cell made of POM plastic with thickness t has a cylindricalinclusion with radius a in the center.
20

Figure 2.4: A sheet of POM plastic of thickness t sandwiched between twoneoprene rubber layers which trap air inside of a cylindrical inclusion of radiusa creating a unit cell of thickness T.
Following the process described in Section 2.1, unit cells were created
with ten different hole radii. The POM height, t, for each unit cell was
6.35 mm. The thickness of the neoprene rubber was 0.8 mm, leading to a
total unit cell thickness, T, of 7.95 mm. The dimensions of each unit cell are
given in Table 2.1. Note that unit cells with a Minnaert resonance frequency
greater than 500 Hz deviated from the dimensions given in Fig. 2.3. The size
of these unit cells was determined to be too small, so each unit cell above
500 Hz was given a side length of 0.051 m, a dimension chosen arbitrarily so
that the unit cell was of workable size.
f0 (Hz) a (m) Cell Size (m)100 0.0853 0.3556200 0.0301 0.1524300 0.0164 0.1016400 0.0107 0.051500 0.0076 0.051600 0.0058 0.051700 0.0046 0.051800 0.0038 0.051900 0.0032 0.0511000 0.0023 0.051
Table 2.1: Dimensions and expected Minnaert resonance, denoted as f0, ofcylindrical inclusions in POM unit cells with a thickness of t = 6.35 mm.
21

2.2.2 Experimental Apparatus and Data Analysis
The resonance frequencies of the unit cells were measured using a sub-
traction method commonly used with encapsulated bubbles in a large, closed
tank designed to provide a flat response at low frequencies [15]. The apparatus
is shown in Fig. 2.5. The tank was a cylindrically shaped with solid steel walls,
with outer diameter D = 1.03 m and height H = 1.03 m. The wall thickness
was 1.27 cm. The tank was completely filled with filtered and degassed water
[39]. It was closed with a tightly fitting lid of 5.08 cm thickness in such a way
that no air was present inside of the tank. The unit cell was suspended on
mono-filament line so that the unit cell was centered in the tank.
Figure 2.5: Experimental setup to measure the resonance frequency of a unitcell in a cylindrical tank with diameter D and height H.
The source used in these experiments was a stainless steel piston with
diameter of 8 cm attached to a stinger with length of 27 cm which fit through
22

a pre-drilled hole in the lid of the tank. The stinger was driven by a Lab-
Works ET-126HF electromagnetic shaker. The driving signal was band-limited
pseudo-random signal with frequency components between 10 Hz and 1.3 kHz.
The signal was generated by an Agilent 89410A vector signal analyzer (VSA).
The shaker was driven through a power amplifier, and the voltage provided
by the VSA applied to the shaker was held constant throughout the experi-
ment. The pressure signal of the acoustic field inside of the tank was measured
using a Reson TC4013 hydrophone conditioned by a Reson VP2000 voltage
preamplifier. The hydrophone was mounted through a hole in the tank wall a
distance of 6 cm below the bottom of the lid.
A common method for measuring the resonance frequency of a single
encapsulated bubble [15] is to consider the total complex pressure field of a
tank with a bubble as a superposition of the field of the empty tank and the
field created by the bubble,
Ptotal = Ptank + Pbubble. (2.18)
A rearrangement of Eq. (2.18) gives the scattered field of the bubble. The
relative amplitude of the pressure response of the bubble is given in dB as
Pbubble = 20 log10(Ptotal − Ptank). (2.19)
The same subtraction technique was used to determine the resonance
frequency of the unit cell. All data was collected from the VSA and processed
in MATLAB. A sample MATLAB script is provided in Appendix A.
23

2.2.3 Results of Unit Cell Experiments
Figure 2.6: Frequency response of the steel tank.
Though the measurements described above were conducted on all ten
unit cells, only four yielded useful and interpretable results. This is due in
part to two issues. Firstly, the tank setup was designed to work best at low
frequencies (below the first tank resonance which occurs at just above 300 Hz).
Fig. 2.6 shows a sample empty tank response from 10 Hz to 1 kHz. As the
frequency increases past an obvious tank resonance at approximately 350 Hz,
the response becomes more modal. It was difficult to clearly extract a single
bubble resonance out of these variations. Additionally, the higher frequency
inclusions were very small. This increased the difficulty of detecting a reso-
nance peak as the unit cell represented an increasingly small volume fraction
within the tank. As such, the presence of the bubble did not significantly alter
24

the pressure field enough to generate a difference that was visible above the
noise of the system.
Figure 2.7: Results of the 100 Hz unit cell measurement showing (a) Ptotal andPtank and (b) Pbubble.
Fig. 2.7 shows the acoustic spectra collected when the 100 Hz unit cell
was in the tank. Fig. 2.7-a shows the raw data before the subtraction technique
was applied. As this data is collected in a frequency range of the tank that is
relatively free from tank resonances and thus the difference between the blank
tank and tank with the inclusion was clear. After applying Eq. (2.19), the
resonance peak is clearly shown in Fig. 2.7-b. The resonance frequency of this
inclusion was found to be 131 Hz.
25

Figure 2.8: Results of the 200 Hz unit cell measurement showing (a) Ptotal andPtank and (b) Pbubble.
The behavior of the 200 Hz unit cell is shown in Fig. 2.8. This resonance
occurred near a small resonance in the tank (see Fig. 2.6), but a difference
could still be seen when the subtraction method was applied, Fig. 2.8-b. The
resonance of this unit cell was recorded to be 210 Hz, though it could truly lie
anywhere between 205 Hz and 225 Hz.
26

Figure 2.9: Results of the 500 Hz unit cell measurement showing (a) Ptotal andPtank and (b) Pbubble.
The 500 Hz unit cell is shown in Fig. 2.9. The resonance frequency of
this inclusion was found to occur at 534 Hz.
27

Figure 2.10: Results of the 800 Hz unit cell measurement showing (a) Ptotal
and Ptank and (b) Pbubble.
Finally, the 800 Hz unit cell is shown in Fig. 2.10. Like the 200 Hz unit
cell the inclusion resonance seems to have occurred within a small resonance
of the tank. The resonance of the inclusion was recorded as 822 Hz (the
location of the tallest peak), though it could lie anywhere between 810 Hz
and 825 Hz. These experimental results seem to confirm that the Minnaert
resonance frequency provides a reasonable estimate of the resonance frequency
of the cylindrical unit cells of interest to this work. Now, a finite element
analysis will be used to further confirm these results.
28

2.3 Finite Element Analysis of Cylindrical Inclusion
The resonance frequency of a single cylindrical inclusion can also be
determined using a finite element analysis (FEA). Finite element analysis is a
method of subdividing an entire domain into smaller, discrete, finite elements
thus simplifying the solution of equations that define the physics of the problem
[40]. FEA can be implemented by hand for simple systems [41], but for more
complicated physical systems it is far more convenient to use a computer.
Multiple computer programs exist to aid in FEA of various systems. COMSOL
Multiphysics was used in this work.
This work uses COMSOL Multiphysics 4.3b to COMSOL Multiphysics
5.0, with models created in earlier versions being updated as necessary to
utilize the newest software updates. The simulations described in this sec-
tion were done using the Acoustic-Structure Interaction module of COMSOL
Multiphysics. All models presented below are 2-D, axisymmetric models.
2.3.1 Development of Model
A model of the entire experimental setup described in Section 2.2 is
unnecessarily complicated and computationally demanding. Instead, the unit
cell was approximated as an inclusion in an infinite water domain. The infinite
domain was approximated using a finite spherical water domain with radiation
boundary conditions. An incident pressure wave of unit amplitude was sent
from the radiation boundary. The response of the inclusion was measured
with a velocity probe on the surface boundary of the inclusion. The model
29

was tested and proven to be accurate by successfully predicting the Minnaert
frequency of a free spherical air bubble positioned at the center of the domain.
In all simulations, the thickness of the POM plastic was 6.35 mm, and
the thickness of the neoprene rubber was 0.8 mm, leading to a total unit cell
thickness of 7.95 mm, replicating the real experimental apparatus. Values
for the required input materials were taken from the literature [42–45] and
are given in Table 2.2. The radius of the inclusion was varied in the model
throughout the size range associated with the experimental unit cells.
Material ρ (g/cm3) E (GPa) ν c (m/s) ηsDelrin 1.41 3.2 0.35 — 0.005
Neoprene 1.4 0.01 0.49 — 0.2Water 0.99 — — 1498 —
Air 0.00121 — — 343 —
Table 2.2: Material properties used in COMSOL Multiphysics finite elementanalysis.
To ensure that the situation was modeled appropriately, it was simu-
lated in stages. Fig. 2.11-a shows the initial model, a cylindrical air inclusion
inside of a water domain. The inclusion had radius a that was given by Ta-
ble 2.1. The spherical water domain had a radius of 2a. All domains within
the model were meshed with a free triangular mesh. The largest mesh element
size was at most one sixth the minimum wavelength of the wave water [46, 47].
A velocity probe placed at the center of the inclusion on the boundary between
the air and water domains measured the amplitude of the velocity normal to
the surface.
30

Figure 2.11: Schematics of COMSOL geometries used to model the system.
The next model places a POM plastic disk around the air inclusion.
Fig. 2.11-b shows the air inclusion of radius a situated in the center of a disk
of POM plastic with radius 2a. The disk was centered in a spherical water
domain with radius 3a. An isotropic loss factor, ηs was added to the solid
POM plastic to simulate material losses. This value was chosen to be ηs=0.005.
This ηs value was chosen so that the amplitude corresponds to a material with
very low loss. The meshing conditions were the same as described for the
previous model, and a velocity probe was placed in the same location as in the
cylindrical cavity case.
The final model has a POM plastic disk with an air inclusion sand-
wiched between two neoprene rubber layers as shown in Fig. 2.11-c. As before,
31

the inclusion of radius a was centered inside a POM plastic disk of radius 2a.
The neoprene layers had radius 2a. The entire cell was centered in a spherical
water domain of radius 3a. An isotropic loss factor of ηs=0.005 was assigned
to the POM plastic and a larger isotropic loss factor of ηs=0.2 was assigned
to the neoprene layers. The meshing conditions were the same as described
before, but the neoprene was meshed such that there were three mesh elements
across the thickness of the neoprene layer. A velocity probe was placed in the
center of the neoprene layer at the center of the inclusion.
2.3.2 Model Analysis and Results
For all models, velocity probe data was exported from COMSOL into
MATLAB where the absolute value of the velocity was plotted as a function of
frequency. Each data set was normalized by the maximum amplitude so that
the resonance occurred when the velocity is unity. A sample of the MATLAB
code is given in Appendix A.
32

Figure 2.12: Velocity response of the unit cell designed with a Minnaert fre-quency of 100 Hz.
Figure 2.12 shows the velocity response of the cell designed at 100 Hz
following the process described in Section 2.1.2. The resonance of the system
appears as a sharp peak in velocity. The cylindrical air inclusion (black line in
Fig. 2.12) had a resonance frequency of 134 Hz. When the inclusion was placed
inside of the POM plastic disk (blue line in Fig. 2.12), the resonance shifted
downward to 130 Hz. Finally, the complete unit cell (red line in Fig. 2.12) had
a resonance at 125 Hz. There are several “side lobes” in the resonance pattern
of the 100 Hz unit cell. These “side lobes” have amplitudes less than 20%
of the resonance peak. They are attributed to the presence of modes on the
stretched neoprene layers, which were acting as clamped circular membranes
33

[48, 49]. The presence of membrane modes leads to a leakage of energy in the
system.
Figure 2.13: Velocity response of the unit cell designed with a Minnaert fre-quency of 200 Hz.
The resonance behavior of the 200 Hz unit cell is shown in Fig. 2.13.
The cylindrical air inclusion had a resonance of 235 Hz. Inside of the POM
disk, the resonance shifted downwards to 220 Hz. Finally, the entire unit cell
had a resonance frequency of 205 Hz. Figure 2.13 shows the presence of low
amplitude “side lobes” that are attributed to membrane modes of the neoprene
layers. In this case, the inclusion was smaller in size, and the membrane modes
in the neoprene were not as pronounced.
34

Figure 2.14: Velocity response of the unit cell designed with a Minnaert fre-quency of 500 Hz.
The 500 Hz cell response is shown in Fig. 2.14. The downward shift
in frequency from the stand alone inclusion to the unit cell becomes more
apparent. The resonance frequency of the cylindrical air inclusion was found
to be 524 Hz, and the resonance frequency of the inclusion in the POM disk
was 446 Hz. The full inclusion had a lower resonance frequency of 402 Hz.
Additionally, the full inclusion resonance had a lower Q-factor when compared
to the other cases. At 500 Hz, the air inclusion had radius a of 7.6 mm and
height t of 6.35 mm. The inclusion began to look less like a flattened cylinder
and more like a tube. It is clear that the change in aspect ratio changes the
resonant response of the unit cell.
35

Figure 2.15: Velocity response of the unit cell designed with a Minnaert fre-quency of 800 Hz.
Finally, the 800 Hz cell response is shown in Fig. 2.15. While the
first two models showed a similar downward shift in resonance frequency from
823 Hz to 642 Hz, the full unit cell model showed a significant deviation from
the Minnaert approximation. The resonance frequency of the unit cell was
found to be 1.2 kHz. Additionally, the resonance peak was broad. The 800 Hz
cell had an even more pronounced tubular shape. In fact the aspect ratio of
radius to cylinder height in this case was approximately 1/2.
36

2.4 Model Comparisons
Fig. 2.16 compares the analytical model for an equivalent volume spher-
ical bubble derived in Section 2.1, the experimental results presented in Sec-
tion 2.2, and the FEA results presented in Section 2.3. At lower resonance
frequencies, the experimental and FEA results agree with the Minnaert fre-
quencies. At higher frequencies, the data begins to diverge. The experimental
results are higher than the Minnaert frequencies, and FEA results predict a
significant difference between Minnaert resonance frequency and experimental
resonance frequency. The difference is attributed to the aspect ratio change
at higher frequencies. Inclusions with a smaller radius look less disc-shaped
than the lower frequency inclusions.
37

Figure 2.16: Comparison of the Minnaert model of resonance frequency withexperimental data and FEA results for the unit cell.
Based on the results shown in Fig. 2.16, maintaining a flatter aspect
ratio as given in Eq. (2.20) will lead to a closer correlation with the Minnaert
model. The 100 Hz unit cell has an aspect ratio such that a/t ≈ 10. The
200 Hz unit cell has an aspect ratio such that a/t ≈ 4. From these numbers
and from knowledge of previous work done with encapsulated bubbles, a value
for the aspect ratio is chosen to maintain a pancake inclusion shape yet allow
for inclusions that are reasonably sized. The aspect ratio between radius, a,
and thickness of the plastic center layer, t, for the inclusion should be
a
t≈ 2.4. (2.20)
38

With this knowledge, the approximation outlined in Section 2.1 can
be used to design the radius of inclusions for use in sub-wavelength panels.
The approximate resonance frequency of a cylindrical inclusion is close to the
actual resonance frequency of an equivalent sphere, ensuring that the panel
with resonant inclusions in the desired frequencies range can be easily designed.
This approximation is used for all work presented in Chapter 3.
39

Chapter 3
Measurement of Panel Performance
This chapter focuses on the design, construction, and testing of the
sub-wavelength underwater isolator described in Chapter 1. Section 3.1 will
describe the dimensions of the panels and their construction materials. Sec-
tion 3.2 will overview the experimental methods used to test the thin-panel
isolators, as well as the post-processing done on collected data. Section 3.3
and Section 3.4 will present the results for two different scales of panel design.
Finally, Section 3.5 will discuss a finite element model of the high frequency
panels. Ultimately, the sub-wavelength panel design is shown to be effective
at isolating sound underwater in various frequency ranges.
3.1 Panel Construction
Chapter 2 showed the experimental and FEA results of the resonance
frequency of unit cells. This section will look at the construction of panels
containing several unit cells. For this purpose, panels were constructed using
the materials described previously for the unit cells, polyoxymethylene (POM)
and neoprene rubber. The materials have he material properties provided in
Table 2.2. The neoprene was attached to the POM plastic using a thin layer of
40

DAP Weldwood, a neoprene based contact cement. Air bubbles were removed
from the adhesive layer by pressing them out carefully as the neoprene layer
was placed down.
Figure 3.1: Schematic showing the air filled inclusion, a panel with air filledinclusions, and a five-sided box created from the isolating panels.
The panels have a layered structure as described previously, and as
shown in Fig. 3.1-a again for convenience. The POM layer has thickness t and
the panel has thickness T. Note that to maintain the aspect ratio given by
Eq. (2.20), the values for t and T were specific to the frequency range being
studied; however, the thickness of the neoprene rubber remained a constant
0.8 mm.
The complete panel is shown in Fig. 3.1-b. To create cylindrical air
inclusions holes with specified radius a were drilled through the POM layer.
For the purpose of these experiments, three different cases of panels were
created in order to explicitly measure the influence of different components of
41

the panel on acoustic isolating performance. The first was a plain panel, which
was simply a POM layer of thickness t. The second was a perforated panel,
which was a POM layer of thickness t perforated with a specific number of
holes with radius a to create the desired void fraction. The third was the void-
filled panel, which was the complete three-layered panel shown in Fig. 3.1-b.
In all cases, a five-sided cube-shaped enclosure was fabricated from the panels
so that an underwater sound source could be surrounded on all sides with the
upward-facing side being the air-water interface. Panels were attached to one
another with hot glue, and excess hot glue was removed with a sharp knife.
The cube-shaped enclosure is shown in Fig. 3.1-c.
3.2 Experimental Design
The panel’s effectiveness as an underwater isolator was tested by mea-
suring its effect on the acoustic response of a water-filled test tank. Panels
were designed for two frequency ranges, and hence required two separate appa-
ratus. Section 3.2.1 describes the high frequency apparatus, and Section 3.2.2
describes the low frequency apparatus. Additionally, Section 3.2.3 explains
the technique for post-processing the data presented in the rest of the chapter.
3.2.1 High Frequency (2 kHz to 5 kHz) Tank Experiments
For panels designed to work in the 2 kHz to 5 kHz range, experiments
were conducted inside an acrylic tank with the dimensions shown in Fig. 3.2.
A source and receiver were placed at opposite ends of the tank. The exact
42

locations of the source and receiver are shown in Fig. 3.3. Both the receiver
and source were suspended approximately 4 cm below the air-water interface.
Figure 3.2: An acrylic tank with 0.37 m deep water was used for high frequencyexperiments.
Figure 3.3: Location of the source (S ) and receiver (R) in the high frequencytank experiment.
43

It should be noted that because this experiment focuses on a frequency
response pattern, the position of the source and receiver are arbitrary as long
as the positions meet two conditions. First, neither the source nor the receiver
should be placed in a null of the tank. Placing the receiver in a null was avoided
by moving the receiver around the tank while the source was on and stationary
until the pressure signal was at a maximum. Secondly, care should be taken
to keep the receiver and source stationary during the course of testing. In this
case, the source and receiver were affixed to a scaffolding over the tank with
a series of clamps.
The source used in the high frequency experiments was a stainless steel
piston with diameter of 12.7 mm, driven by a stainless steel stinger with length
of 18 cm that was attached to an LDS V101 electromagnetic shaker. The exci-
tation signal was a continuously repeated periodic chirp from 2 kHz to 5 kHz
generated by an Agilent 89410a Vector Signal Analyzer (VSA) which drove the
shaker through a power amplifier. The voltage level on the power amplifier
was constant throughout all measurements. The receiver used to measure the
acoustic pressure within the tank was a Reson TC4013 hydrophone conditioned
with a Reson VP2000 voltage preamplifier.
To eliminate the formation of air bubbles in the tank, the water was
degassed using a traditional method [39] for approximately three hours prior
to conducting experiments. The thin aluminum tube that acted as a sheath for
the hydrophone wire was back-filled with water from the tank to improve signal
coherence. Each panel cube was made to enclose the source by suspending
44

it from shaker plate with mono-filament fishing line, as shown in Fig. 3.4.
Suspending the cube from the shaker plate allowed for a consistent placement
of the panels. The cube was suspended such that the upward-facing side of
the cube was the air-water interface.
Figure 3.4: A photograph of the void-filled cube in place during an experiment,showing the cube suspended around the source from the shaker plate (A) andthe cube’s upward-facing side (B) on the air-water interface.
3.2.2 Low Frequency (500 Hz to 1.3 kHz) Tank Experiments
For panels designed to work in the 500 Hz to 1.3 kHz range, experi-
ments were conducted using the apparatus described in Section 2.2 with the
lid removed from the tank. To prevent coupling between the low frequency
source and the tank, the source was suspended from a hook above the tank
by a specially designed shaker plate as indicated by the schematic shown in
45

Fig. 3.5. A photograph of the shaker in place is shown in Fig. 3.6. The posi-
tion of the source was arbitrary as long as it was held constant throughout the
experiments and did not sit in a null of the tank’s modal structure. The cube
was suspended on mono-filament line from the shaker plate. The length of the
line was adjusted so that the air-water interface formed the upward-facing side
of the cube, completely enclosing the source.
Figure 3.5: Tank described in Section 2.2 with shaker and cube suspendedfrom a plate above the tank.
The source used in the low frequency experiments was a stainless steel
piston with diameter of 8 cm attached to a stinger with length of 27 cm. The
stinger was attached to a LabWorks ET-126HF electromagnetic shaker. To
46

improve the quality of the signal, the frequency range in question was broken
into six frequency bands. In all cases, the signal was a continuously repeated
periodic chirp generated by an Agilent 89410a Vector Signal Analyzer. The
shaker was driven through a power amplifier, and the voltage at the power
amplifier was kept constant throughout the measurements. The wall mounted
hydrophone was a Reson TC4013 conditioned using a Reson VP2000 voltage
preamplifier.
Figure 3.6: Low frequency cube during an experiment showing the hook andplate (A) used to suspend the shaker and the cube suspended on mono-filamentsuch that the upward-facing side (B) is at the air-water interface.
3.2.3 Post-Processing of Data
For both low and high frequency experiments, the acoustic pressure
response measured by the hydrophone was digitized using the Agilent VSA.
47

The signal analyzer calculated the averaged transfer function (the hydrophone
signal normalized by the excitation signal) using 30 frequency sweeps. Transfer
functions were collected for each of the panel cases (plain, perforated, and void-
filled) at the varying void fractions and material properties discussed below.
Transfer functions were also collected for the empty tank. The empty tank
is referred to in this work as the baseline case. All data was processed using
MATLAB. A sample code for the processing of data can be found in Appendix
A.
The frequency-averaged insertion loss is useful as a single-number met-
ric for comparison of panel noise isolation efficacy, and was calculated by sub-
tracting the value of the transfer function for each case from the value of
the transfer function of the baseline, converting into a dB scale, and taking
the mean across the frequency range. The MATLAB code used to calculate
average insertion loss is found in Appendix A.
3.3 High Frequency (2 kHz to 5 kHz) Panels
This section discusses the effect of including voids in a panel, the effect
of increasing the number of inclusions on a panel, and the effect of changing the
material that the panel was constructed out of on the panel’s isolation effect.
The panels were designed to operate across the 2 kHz to 5 kHz frequency range.
Panels were created and tested as described in Section 3.1. These panels had
POM layer thickness t = 1.9 mm and total thickness T = 3.5 mm. The panels
had side length L = 9.8 cm. Using the method described in Chapter 2, the
48

radius of the inclusions for these panels was a = 4.3 mm. The plain, perforated,
and void-filled panels tested in these experiments are shown in Fig. 3.7.
Figure 3.7: Cubes created from high frequency panels. From (L) to (R): Plaincase, perforated case, void-filled case.
3.3.1 Effect of Voids
The perforated case and the void-filled case had four cylindrical inclu-
sions per panel. The inclusions were placed randomly; however, an effort was
made to ensure that inclusions were placed at least one diameter from their
nearest neighbor or the edge of the panel.
49

Figure 3.8: Isolation effect of panels with and without air-filled inclusions onthe frequency response of the tank.
The measured transfer functions are shown in Fig. 3.8. The baseline
(black line), plain (green line), and perforated (red line) cases all show a similar
received pressure level. The void-filled case, represented by the blue line, shows
a significant decrease in received level across the frequency band. It is clear
that the majority of the isolation effect is due to the presence of enclosed
pockets of air.
3.3.2 Effect of Void Fraction
Attenuation of sound propagating in bubbly water increases with the
increasing void fraction of the air phase [9]. Similarly, a panel with more
50

inclusions should provide more isolation across the frequency band. The void
fraction of the material is defined as the volume of the inclusions divided by
the total volume of a single solid plate,
Void Fraction =ntπa2
TL2. (3.1)
In Eq. (3.1), t is the thickness of the center layer of the panel, T is
the total thickness of the panel including neoprene, L is the side length of the
panel, and n is the number of inclusions present on the panel. Panels with void
fractions of 0.6%, 1.3%, 2.6%, and 3.9% were created. These void fractions
represent panels that had 2, 4, 8, and 12 air filled inclusions respectively.
Again, care was taken to ensure that inclusions were at least one diameter
from their nearest neighbor or the edge of the panel. These conditions became
more difficult to meet at the highest void fraction (3.9%, 12 inclusions).
51

Figure 3.9: Isolation effect of panels with varying void fraction on the frequencyresponse of the tank.
Transfer functions for each of the void fraction cases are presented in
Fig. 3.9. It can be seen that for a majority of the frequency range an increase
in void fraction on the panel leads to an increase in isolation effect. The mean
insertion loss was calculated for six 500 Hz bands across the frequency range,
as shown by Fig. 3.10. The case of the plain panel (no inclusions, 0% void
fraction) was included for comparison.
52

Figure 3.10: Mean insertion loss across specified frequency bands for panelswith varying void fraction.
Figure 3.10 shows that below 3.5 kHz, an increasing void fraction corre-
sponded directly to an increasing insertion loss. Between 3.5 kHz and 4.5 kHz,
the trend shifted. For the remainder of the frequency range the 0.6% and 1.3%
void fraction panels had a higher isolation effect. In cases with a high void
fraction, maintaining the one diameter distance between the inclusion’s neigh-
bor or the edge of the panel became difficult. The inclusions are likely coupling
to one another, causing a shift in resonance frequency and deteriorating the
isolation effect in the desired band [50–52].
53

Figure 3.11: Mean insertion loss of the panel as a function of void fractionacross the entirety of the frequency range.
The mean insertion loss across the entire 2 kHz - 5 kHz range showed
the expected monotonic increase, Fig. 3.11. The exact values for insertion loss
of the 0.6%, 1.3%, 2.6%, and 3.9% panels were 8.25 dB, 9.08 dB, 9.13 dB,
and 10.25 dB respectively. In these frequencies, panels had a non-dimensional
thickness, kT, of 0.02 to 0.07.
3.3.3 Effect of Using 3-D Printed Components
Until this point, panels have been constructed with a center layer of
POM. For these experiments, the POM layer was replaced with a porous poly-
lactide (PLA) polymer created using 3-D printing. PLA is a plastic with prop-
54

erties similar to Delrin. It has a density of 1.25 g/cm3 and Young’s Modulus
of 3.5 GPa [42, 43]. Sheets of PLA were created on on a 3D printer which used
PLA polymer as its filament material. 3D printing is an emerging technology
that allows for quick replication and rapid prototyping of designs that are cre-
ated in a CAD program like SolidWorks. A 3D printer uses a melted plastic
filament to draw layers of the desired design, ultimately creating a solid plastic
piece.
Figure 3.12: Example of a solid cylinder created on a 3D printer. The interiorhexagonal structure is called in-fill. Image courtesy of MakerBot.
In general, a object printed on a 3D printer like that available to the
author has a solid outer layer and is filled inside with a hexagonal plastic
structure, as shown in Fig. 3.12. This hexagonal structure is called the in-fill,
and it exists to maintain an object’s structural stability while reducing the
55

amount of PLA plastic used in the print. The MakerBot Replicator 2 was
used to print panels in this work. The Replicator 2 allows users to adjust the
in-fill percentage of the solid portions of a printed piece. Adjusting the in-fill
percentage adjusts the size of the hexagonal structure in the part. Fig. 3.13
shows rectangular prisms with high and low in-fills. A higher in-fill percentage
has a smaller hexagonal structure and uses a higher amount of PLA plastic in
the print. In-fill can be adjusted from 1% to 100%, but commonly solids are
printed with a 15% to 25% in-fill.
Figure 3.13: Two 3D printed pieces with high in-fill (a) and low in-fill (b)percentage.
An attempt was made to correlate in-fill percentage and panel prop-
erties. Solid square panels with the same dimensions given previously were
printed at four different in-fill percentages: 5%, 25%, 50%, and 100%. The den-
56

sities of these panels were measured to be 1.06 g/cm3, 1.08 g/cm3, 1.07 g/cm3,
and 1.04 g/cm3 respectively. An increase in in-fill percentage should increase
the percentage of the panel that is plastic, thus increasing the panel’s density.
An increase from 50% in-fill to 100% in-fill should correlate to an addition of
50% more plastic (and a rough doubling of density), but this is not shown in
the overall density calculations.
As stated above, each solid 3D printed object has a completely solid
outer layer and the hexagonal in-fill. The thickness of the solid outer layer
is usually thin in comparison to the scale of the printed object. The same
cannot be said for these panels. These panels are dominated by the solid
outer layers. This explains the disparity between in-fill and panel density.
Unlike the prisms shown in Fig. 3.13, the hexagonal layer is very thin, with
a thickness of approximately 0.5 mm compared to the total panel thickness
of 1.9 mm. Additionally, observing the panel as it was being printed showed
that the interior hexagonal layers were almost non-existent.
Though the change in in-fill percentage does not seem to affect the
bulk material properties of the thin panels, it is still worth investigating if
there will be an effect on the acoustic isolation. Panels with dimensions L =
9.8 cm, and t = 1.9 mm were printed with four holes of radius a = 4.3 mm
randomly spaced across the face. This corresponded to a void fraction of 1.3%.
Neoprene sheets of 0.8 mm thickness were attached to the PLA plastic with
neoprene based contact cement. Cubes were fabricated from panels printed at
three in-fill percentages: 5%, 25%, and 50%.
57

Figure 3.14: Isolation effect of panels with varying in-fill percentages.
Figure 3.14 shows the acoustic pressure spectra for void-filled panels of
varying in-fill percentages. Over the entire frequency range, the panels had
an isolation effect. Below 3.5 kHz, the panels behaved similarly regardless of
in-fill percentage, but above 3.5 kHz the panel behavior started to diverge. At
higher frequencies, the 5% in-fill panel still isolates, but it has a lower isolation
efficacy than the higher in-fill panels.
58

Figure 3.15: Mean insertion loss across specified frequency bands for a panelmade with PLA plastic center layer of varying in-fill percentage.
The data sets for these panels were broken down into frequency bands
and the mean insertion loss for each frequency band was calculated, as seen
in Fig. 3.15. At lower frequencies panels behave similarly, and at higher fre-
quencies their behavior diverged. The 50% in-fill panel maintained the highest
amount of isolation across all of the frequency bands.
59

Figure 3.16: Effect of in-fill percentage of a PLA panel on insertion loss forspecified frequency bands.
The effect of in-fill percentage on isolation across frequency bands is
presented in Fig. 3.16. This graph shows that, generally, an increase in in-fill
percentage leads to an increase in insertion loss. Additionally, this increase is
most drastic for the 4.5 kHz to 5 kHz frequency range. The mean insertion loss
was also calculated across the entire frequency band. The results are plotted
with the previous Delrin panel results in Fig. 3.17.
60

Figure 3.17: Mean insertion loss of the panel as a function of void fraction forDelrin plastic and PLA plastic center layers.
For both the 25% in-fill and the 50% in-fill, the PLA plastic panel
showed an improved performance over a Delrin counterpart of similar void
fraction. For the 5% in-fill, the PLA plastic panel showed a reduction in per-
formance. These results are especially interesting if one considers a Delrin
panel to be essentially 100% in-fill. One can make the hypothesis based on
the data that printed panels are ineffective at low in-fill, increase in efficacy
through in-fill up to 50%, and then decrease in efficacy again by 100%. Ul-
timately, it seems the in-fill percentage is simply a machine setting that has
more impact on the bulk material (as shown in the prisms in Fig. 3.13) than
the thin panels created here. However, based on the data, the in-fill percentage
61

of the panel material must alter isolation effect. At this point the exact phys-
ical reason for this effect is unknown. Much more detailed experiments are
required to develop firm conclusions about the isolation efficacy of 3D printed
panels.
3.4 Low Frequency (500 Hz to 1.3 kHz) Panels
Panels designed to operate in the 500 Hz to 1.3 kHz range were created
and tested as described in Section 3.1. These panels had POM layer thickness
t = 3.9 mm and total thickness T = 5.5 mm. The panels have side length
L = 15.2 cm. The inclusion has radius a = 9.525 mm. The kT value for this
system is approximately 0.01 to 0.03, compared to a kT value of 0.02 to 0.07
for the high frequency panels. All panels had two inclusions, corresponding
to a void fraction of 1.3%. The inclusions were placed randomly but care was
taken to ensure that each inclusion was one diameter away from its neighbor
and the edge of the panel. As before, three types of panels were created. The
solid POM panel, called the plain case, the POM panel with uncovered holes,
called the perforated case, and the POM panel with covered inclusions, called
the void-filled case. The three cases are shown in Fig. 3.18.
62

Figure 3.18: Cubes created from low frequency panels. From (L) to (R): Plaincase, perforated case, void-filled case.
3.4.1 Effect of Voids
Figure 3.19: Isolation effect for panels designed to operate from 500 Hz to1.3 kHz.
63

The measured transfer functions for low frequency panels are shown
in Fig. 3.19. Note the tank response is more complicated than the responses
shown in Section 3.3, due to the fact that the cylindrical tank has a more
complex modal structure than the rectangular tank used in Section 3.3. Sec-
ondly, the dynamic range of Fig. 3.19 is large with a range of 100 dB, rendering
small differences in level difficult to see. For better visualization, the data is
split into six separate frequency bands. From 150 Hz to 350 Hz the source
was exciting the tank below the resonance of the inclusion in the panel. In
Fig. 3.20, the baseline, plain, and perforated cases all had a similar received
level. The void-filled case had a received level that is higher than the base-
line. This behavior is attributed to the fact that a bubble, below resonance,
amplifies sound [8, 9] rather than attenuating it.
Figure 3.20: Isolation effect of the low frequency panel from 150 Hz to 350 Hz.
64

Figure 3.21: Isolation effect of the low frequency panel from 350 Hz to 500 Hz.
As the frequency was increased the resonance frequency of the bubble
was crossed and the panel began to act as an isolator, as shown in Fig. 3.21.
A significant decrease in received level is shown in this frequency band. Fig-
ure 3.22 shows the received level of the void-filled panel was consistently lower
than the baseline case. Above 650 Hz, the tank becomes increasingly diffuse;
yet, the received level for the void-filled panel remained at or below received
level for the baseline, plain and perforated cases, as shown in Fig. 3.23 through
Fig. 3.25.
65

Figure 3.22: Isolation effect of the low frequency panel from 500 Hz to 650 Hz.
Figure 3.23: Isolation effect of the low frequency panel from 650 Hz to 800 Hz.
66

Figure 3.24: Isolation effect of the low frequency panel from 800 Hz to 1 kHz.
Figure 3.25: Isolation effect of the low frequency panel from 1 kHz to 1.3 kHz.
67

3.4.2 Mean Insertion Loss
Figure 3.26: Mean insertion loss as a function of frequency for panels designedto operate from 500 Hz to 1.3 kHz.
Mean insertion loss for the low frequency panel was calculated as a
function of frequency. Figure 3.26 shows these values. An insertion loss below
zero implies an amplification relative to the baseline case, and an insertion loss
above zero indicates an isolation relative to the baseline case. As expected,
the plain and perforated cases show little deviation from baseline. Below
the resonance frequency of the inclusion, the void-filled panel demonstrated
an average amplification of 2.2 dB. Above resonance the panel had an average
isolation of 3.1 dB. This is comparable to the insertion loss for panels of similar
68

void fraction shown in Fig. 3.11. A more complete low frequency void fraction
study would be useful, but it was beyond the scope of this work.
3.5 Finite Element Analysis of 2 kHz to 5 kHz Panel
In this section, a finite element analysis of the thin-panel isolator is
developed to serve as a compliment to experimental results presented above.
The analysis of the system was done in COMSOL Multiphysics 4.3b.
3.5.1 Development of Model
The cube structure described in Section 3.1 and Section 3.3 was sim-
ulated in 3D using the COMSOL Multiphysics 4.3b Acoustic-Structure Inter-
action physics module. The geometry of the model is shown in Fig. 3.27. It
was not necessary to exactly recreate the tank experiment. In fact, the results
presented here are more preferable because they simulate the behavior of the
isolator in a free-field environment which is similar to what the panel would
experience in-situ. Instead, the model assumed the cube was located in a free-
field water environment. A water half-space was simulated by a large rectangle
bounded by perfectly matched layers on five sides. Perfectly matched layers
are finite element domains whose behavior is such that no reflections return
from the domain boundaries or edges. These types of domains can therefore
be used to simulate an infinite environment. The top face (in the orientation
shown in Fig. 3.27) of the domain was a pressure release surface modeled to
approximate the air-water interface. The cube was located directly in the cen-
69

ter of x-y plane. The source was a simulated piston located in the center of
the cube. The piston was created by modeling an empty rectangular prism
with an end-on area of 1 cm2 and applying a frequency dependent normal
acceleration condition to this plane.
Figure 3.27: 3D COMSOL geometry used to model the thin-panel system.
The material properties used in the simulation are given in Table 2.2.
The Delrin and neoprene domains were classified as linear elastic materials.
The air and water domains were classified as fluids. Isotropic loss factors were
added to both the Delrin and the neoprene domains to simulate loss in those
materials. Delrin was given a value of ηs = 0.005 and neoprene was given a
value of ηs = 0.01.
All elements in the geometry were meshed using a free tetrahedral mesh.
70

This geometry was meshed in such a way that the largest element was one-
sixth of the wavelength of the slowest sound-speed in the medium [46, 47]. On
the neoprene sheets, this mesh element size was decreased to a tenth of the
wavelength of the shear wave speed in the medium being meshed.
3.5.2 Model Analysis and Results
The excitation frequency of the piston’s normal acceleration was swept
from 2 kHz to 5 kHz in increments of 25 Hz. A COMSOL boundary probe
was used to measure the radiated power through each of the six boundaries
of the water half-space. The radiated sound power was calculated by taking
the surface integral of the component of the intensity normal to the surfaces
of the water domains,
Wboundary =
∫S
I⊥dS. (3.2)
The total radiated power is the sum of the power calculated for each of the
six surfaces of the geometry,
Wtotal =6∑i=1
Wboundary,i. (3.3)
All of these calculations were done in the COMSOL interface, and the
data was exported to MATLAB for further analysis and plotting.
71

Figure 3.28: Results finite element analysis of radiated sound power in thepanel system.
The radiated sound power predicted by the finite element model is pre-
sented in Fig. 3.28 in dB re 1 nW. Across the frequency range, the baseline,
plain, and perforated cases all maintained a similar level of radiated power.
The void-filled case showed a significant decrease in radiated power after ap-
proximately 2.25 kHz and maintained a lower radiated power up to the end
of the frequency range at 5 kHz. This behavior is consistent with what would
be expected from a panel with inclusions that have a resonance frequency
near 1.3 kHz. These results confirm what was shown in Section 3.3. A sub-
wavelength, void-filled panel will act as an isolator for sound in the 2 kHz to
72

5 kHz frequency range.
The experimental data and finite element models presented in this chap-
ter confirm that sub-wavelength panels can be constructed that surpass the
isolation capabilities of a pure panel. Their isolation capabilities rely on the
resonant effects of bubble-like cylindrical inclusions within the panel. The re-
sults also confirm that the predictions and measurements on unit cells can be
extended to multi-cell panels for sound isolation.
73

Chapter 4
Conclusions
4.1 Summary
Through a combination of experiment and finite element analysis, this
work successfully completed the three objectives presented in Chapter 1. To
reiterate, it was the goal of this work to design, fabricate, and experimentally
verify the efficacy of sub-wavelength panels for acoustic isolation. Inspired by
the previously studied isolating capabilities of bubbles and advancements in
the field of acoustic metamaterials, Chapter 1 presents the design of a three
layer panel with cylindrical air-filled inclusions.
Chapter 2 provided a derivation of the resonance of a spherical bubble
in water [7, 8] and used the radius of that sphere to approximate the radius of
an equivalent volume cylinder with thickness t. A series of unit cells with cylin-
drical inclusions of various resonance frequencies were created and tested. In
addition, several different sized cylindrical inclusions were modeled in COM-
SOL Multiphysics. From these results, improved estimates of the resonance
frequency for these cylindrical inclusions were determined.
Overall, the experimental and FEA results were in good agreement
with the Minnaert resonance model of the equivalent sphere. However, the
74

experimental results provided two important insights regarding the salient
differences between spherical and cylindrical bubbles with the same volume.
First, large cylindrical inclusions exhibit membrane resonances with amplitude
on the order of 20% the bubble resonance. This effect was shown in Fig. 2.12
and Fig. 2.13. Secondly, to closely match the Minnaert resonance, the aspect
ratio of cylinder radius, a, to cylinder thickness, t, must be such that the
inclusion maintains a flattened shape. This corresponds to an aspect ratio
a/t ≈ 2.4. An inclusion with a larger a/t aspect ratio will exhibit a resonance
that is significantly different from the Minnaert approximation, as was shown
in Fig. 2.15 and Fig. 2.16. Despite these differences, this work concludes that
the Minnaert approximation and the transformation detailed in Section 2.1.2
are appropriate design tools for the desired panel.
Chapter 3 elaborated on the design and construction of sub-wavelength
free standing panels for acoustic isolation as described in Chapter 1 and using
information obtained from the unit cell results in Chapter 2. Panels were
fabricated for two different frequency ranges: 2-5 kHz and 0.5-1.3 kHz. Panels
designed to isolate in the higher frequency range (2 kHz to 5 kHz) had a kT
value of 0.02 to 0.07. They provided an average isolation ranging from 8 dB
to 10 dB depending on the void fraction of the panel. This isolation effect
greatly exceeds what one would expect from the mass law. Increasing the void
fraction of the panel increases the isolation efficacy of the panel, as shown in
Fig. 3.11.
Additionally, the effect of center panel material was investigated for the
75

high frequency panels. A 3D printer was used to rapidly create panels from
PLA polymer at a variety of in-fill fractions. It was shown that panels with a
high in-fill fraction (25% to 50%) show a slight improvement in isolation over
the the POM panel.
Panels were also designed to isolate in the 500 Hz to 1.3 kHz range.
The isolation effect of the low frequency panel with void fraction of 1.3% was
shown in Fig. 3.26. The panel had a kT value of 0.01 to 0.03. The maximum
isolation occurs immediately following the resonance of the bubble. At this
point, the insertion loss was 3.1 dB.
Finally, the high frequency sub-wavelength panel system was modeled
using finite element analysis in COMSOL Multiphysics. The isolation effect
determined by the experimental measurements was complimented by a mea-
surement of radiated power in the system.
4.2 Future Work
This work has successfully designed and tested a sub-wavelength panel
for underwater acoustic isolation. Though the work presented here provides
strong evidence that these types of panels will be effective sub-wavelength
sound isolators, there are several aspects of the research that warrant further
investigation. First, an effort should be made to more fully characterize the
frequency dependence of the high frequency panels. The low frequency data
in Fig. 3.26 covers about two octaves, but the high frequency data in Fig. 3.10
covers only one octave. Expanding this frequency range may further illuminate
76

interesting bubble screen behavior. Additionally, the low frequency panels
should be tested at higher void fractions. Current data is for a low frequency
panel at 1.3% void fraction. Increasing the void fraction will allow for more
detailed investigation of isolation efficacy of the panel and the rich physics
associated with unit cell interaction.
It would also be interesting to investigate exactly how the panel is
isolating sound. Currently the panel is called an isolator, but performing ad-
ditional experiments on the structure would allow for further classification. It
would be pertinent to know if the panel is acting as a pure reflector, as an
absorber, or both. Additionally, it would be helpful to know what range of
kT (or another non-dimensional parameter) provides effective isolation in each
frequency range. An effort should be made to determine reflection coefficient,
transmission coefficient, and the attenuation coefficient of the material. This
information could come from measurement (like an impedance tube experi-
ment) or a more fully developed finite element analysis of the system.
Future work on this topic should attempt to more completely charac-
terize the dependence of panel isolation on panel material. This could be done
in a finite element analysis with interesting results being recreated experimen-
tally for proof of concept. It would be even easier to explore the relationship
between panel isolation and material properties using an analytical model de-
rived from the equivalent circuit model of the system. The beginning steps
of such a model is presented in Appendix B; however, it is preliminary and
requires more detailed investigation before being used as design tool for panels
77

of the type investigated by this work.
The effect of layering multiple panels and varying inclusion configu-
ration can also be explored using FEA or experiment. Creating panels with
two or more different size inclusions in hopes of increasing the range of the
isolation band is of significant interest and could easily be explored using the
methods presented in this thesis. These tests could be conducted with the
current material parameters and the scaling techniques outlined in Chapter 2.
Additionally, the panels should be tested at a variety of scaled frequencies,
including the more of the frequencies that are most associated with man-made
underwater noise [2].
Finally, it would be interesting to investigate the ability of the panels
to isolate the noise in environments where water must flow. If the panels
have a similar isolation effect when there are gaps between the edges of the
panels, they could be made to surround a flowing water source. Of particular
interest would be the isolation of aquarium filters, outboard motors, and other
underwater pumps. Fully characterized panels could be created, installed, and
tested in-situ.
In total, this thesis explores the present body of work in thin panel
acoustic metamaterials and underwater acoustic isolation using bubbles. These
ideas are then combined to develop the idea of a sub-wavelength, free-standing
underwater panel for acoustic isolation. Additionally, the spherical resonance
approximation proposed by Minnaert is shown to be valid for cylindrical inclu-
sions with a significantly flat aspect ratio. Panels with cylindrical inclusions
78

were developed and tested in the 500 Hz to 1.3 kHz range and the 2 kHz to
5 kHz range. Panels of this type show a frequency averaged insertion loss of
3 dB to 8 dB with a void fraction of 1.3% and non-dimensional kT value of 0.02
to 0.07. Additionally, it is shown that an increase in void fraction yields an
increase in panel isolation capability. It is the hope that this and future work
in the area of sub-wavelength panels will improve the underwater environment
for marine life and underwater naval applications.
79

Appendices
80

Appendix A
MATLAB Code for Data Analysis
A.1 Unit Cell - Experimental Results
The code below shows the post-processing method for determining the
resonance of the unit cell from the data collected as described in Section 2.2.2.
The code has been simplified to represent any possible file exported from the
Agilent VSA. Data is plotted using standard plot functions.
1 %Read in data and assign basic values2 Cell = importdata('DataCell.asc'); %Tank response w/ cell3 Blank = importdata('DataNoCell.asc'); %Tank respnose empty4
5 Freq Cell = Cell(:,1);6 Freq Blank = Blank(:,1);7
8 Cell Response = Cell(:,2);9 Blank Response = Blank(:,2);
10
11 %The following applies the subtraction to the data12 Real Response = Cell(:,4) - Blank(:,4);13 Imag Response = Cell(:,5) - Blank(:,5);14 Full Response = Real Response + 1i*Imag Response;15 Unit Cell Response = 20*log10(abs(Full Response));16
17 %Plot the raw data18 figure(1)19 plot(Freq Cell, Cell Response)20 hold on21 plot(Freq Blank, Blank Response)22 xlabel('Frequency [Hz]')
81

23 ylabel('Acoustic Pressure [dB]')24
25 %Plot the unit cell response26 figure(2)27 plot(Freq Cell, Unit Cell Response)28 xlabel('Frequency [Hz]')29 ylabel('Acoustic Pressure [dB]')
A.2 Unit Cell - Finite Element Analysis Results
The code below shows the post-processing method for determining the
resonance of the unit cell from the results of a finite element analysis as de-
scribed in Section 2.3.2. Data is plotted using standard plot functions.
1 %Read in data and assign basic values2 COMSOL = importdata('DataFromCOMSOL.txt');3 Freq = COMSOL(:,1);4 Velocity = COMSOL(:,2);5
6 %Normalize the velocity value7 Norm Velocity = abs(Velocity)./max(abs(Velocity));
A.3 Panel Isolation - Experimental Results
The code below shows the post-processing method for determining the
isolation effect of the panels as described in Section 3.2.3. The code has been
simplified to represent any possible file exported from the Agilent VSA. Data
is plotted using standard plot functions.
82

A.3.1 Transfer Function Graphs
Note, if there is more than one data set (as is the case for most of the
figures in this work), the maximum value will need to be determined by an
inspection of all available data sets.
1 %Read in data and assign values2 Case = importdata('Case.asc');3 Freq = Case(:,1);4 Tank Response = Case(:,2);5
6 %Determine maximum7 Max = max(Tank Response);8
9 %Normalize10 Normalized Response = 20*log10(Tank Response) - 20*log10(Max);
A.3.2 Insertion Loss Calculation
The average insertion loss is the difference between the baseline level
and the received level for various cases.
1 %Read in data and assign values2 Base = importdata('Baseline.asc');3 Case = importdata('Case.asc');4 Freq = Case(:,1);5 Base Response = Base(:,2);6 Case Response = Case(:,2);7
8 %Calculate Insertion Loss9 IL = mean(20*log10(Base Response - Case Response));
83

Appendix B
Analytical Model of Unit Cell
In an attempt to better understand the physics of the unit cell de-
scribed in Chapter 2, an analytical model was developed using an equivalent
circuit for the system. From the circuit model an impedance can be calcu-
lated. If the system is lossless, which the assumption being made here, the
resonance frequency of the inclusion will occur when the imaginary portion of
the impedance (the reactance) is equal to zero.
B.1 Equivalent Circuit Impedance
Figure B.1: Schematic of the unit cell described in Chapter 2.
Figure B.1 is a schematic drawing of the unit cell as described in Chap-
ter 2. The equivalent circuit for this system is presented in Figure B.2. Note
that in this analytical model the pressure source, P , is placed inside of the
84

cylindrical air-filled inclusion.
Figure B.2: Completed equivalent circuit of the unit cell.
Figure B.2 contains the following electro-acoustic components: The
radiation impedance of the piston-like membrane over the inclusion in the unit
cell, Zrad, the compliance of the membrane, Cmem, the mass of the membrane,
Mmem, the mass of the air near the inclusion surface, Mair, the compliance of
the air in the inclusion, Cair, and the compliance of the POM plastic walls
of the unit cell, Cwalls. The velocity components of the system are shown for
clarity in Fig. B.2. The first step to solve for the input impedance of the
system is to simplify the circuit.
85

Figure B.3: Simplified circuit model with impedances listed instead of indi-vidual components.
Figure B.3 shows the circuit model from Fig. B.2 simplified down to
the impedance components. The impedance of each individual component
is determined according to the rules of circuits. The total impedance of the
membrane can be seen as a series addition of the membrane components
Zmem = Zrad +1
jωCmem
+ jωMmem + jωMair. (B.1)
In order to show a symmetric circuit, which is easier to visualize, the compli-
ance of the wall is split into two ”‘walls”’ with each ”‘wall”’ having a com-
pliance of half the compliance of the material. The impedance of the walls is
simply
Zwalls =1
jωCwalls
2
=2
jωCwalls
. (B.2)
The impedance of the air is given by
Zair =1
jωCair
. (B.3)
86

Finally, the value for radiation impedance, Zrad, is taken from the piston func-
tions in Ref. [48], simplified to first-order when ka << 1
Zrad =ρ0c0πa2
(ω2a2
2c20+ j
8ωa
3πc20
). (B.4)
In Eq. (B.4), a is the radius of the inclusion and ρ0 and c0 are the
density and sound speed in water, respectively. The compliance and mass of
the membrane components are more difficult to determine. The thin material
layer can be treated as either a bending plate or as a membrane under tension.
As the tension of the membrane is unknown, a reasonable approximation is to
treat the thin layer as a bending elastic plate. From [53], the compliance of a
thin elastic plate is given by
Cmem =πa6
195.1(
Eh3
12(1−ν2)
) . (B.5)
In Eq. (B.5), E and ν are the Young’s modulus and Poisson’s ratio of the elastic
material, in this case neoprene. The height of the neoprene layer is given by
h as shown in Fig. B.1. According to [53] the mass of the thin neoprene layer
is well approximated as
Mmem = 1.8830ρneoh
πa2, (B.6)
and the compliance of the air volume with height h′ is dependent on the bulk
modulus of air and can be written
Cair =V
K=
πa2h′
ρairc2air. (B.7)
87

The mass of the air is given by
Mair =ρairh
′
2πa2. (B.8)
Finally, the compliance of the walls is approximated common elasticity prob-
lem of a pressurized inclusion in an infinite medium, as shown in Section 8.4.1
of Ref. [54]. The compliance is dependent on the Young’s modulus, E, and
Poisson’s ratio, ν, of the elastic material that makes up the wall of the unit
cell, which in this case is POM. The compliance is
Cwalls =πa2h′(1 + ν2)
E. (B.9)
Figure B.4: Final simplified circuit model used to determine the inputimpedance.
The circuit can be simplified once more, as shown in Fig. B.4. The
input impedance is then given by
Zin = Zair +
[2
Zmem
+2
Zwalls
]−1. (B.10)
88

B.2 Results and Discussion
The magnitude of the input impedance, Eq. (B.10), is plotted against
frequency. Additionally, the phase of the input impedance can be plotted. The
minimum values of the magnitude of the input impedance corresponds to the
resonance frequency of the system. A zero radian phase angle is also indicative
of resonance in the system. A complete MATLAB code for this circuit model is
found in Section B.4 The inclusion sizes are taken from Table 2.1. All material
properties are taken from Table 2.2.
Figure B.5: Results of circuit model analysis for the 100 Hz unit cell.
Fig. B.5 shows the circuit response of the 100 Hz unit cell. The min-
imum in the magnitude of the input impedance, and the accompanying shift
in phase angle, shows where the resonance occurs. For this unit cell, the res-
89

onance occurs at 125 Hz. For comparison, the experimental resonance of the
unit cell was found to be 131 Hz, corresponding to an error of only -4.6% be-
tween the predicted and measured values. It appears that for this radius the
circuit model is an effective model for the system.
Figure B.6: Velocity information for the 100 Hz unit cell.
Fig. B.6 shows the velocity of the membrane, umem, and the velocity of
the walls, uwalls for the 100 Hz unit cell. The velocity is determined by assuming
a unit pressure amplitude and making use of the impedance relationships so
that
umem =
[Zin−Zair
Zin
]Zmem
, (B.11)
and
uwalls =
[Zin−Zair
Zin
]Zwalls
. (B.12)
90

The peak in the velocity of the wall corresponds with the resonance of the
system at 125 Hz. The same analysis can be repeated for the remaining unit
cell sizes. The size of the cell and its resonance frequency is reported in
Table B.1.
fMinnaert (Hz) a (m) fCircuit (Hz)100 0.0853 125.3200 0.0301 211.3300 0.0164 290.6400 0.0107 385.4500 0.0076 552.5600 0.0058 853.8700 0.0046 1370800 0.0038 2111900 0.0032 31541000 0.0023 7143
Table B.1: Resonance results from the input impedance as determined by thecircuit model above. Inclusion dimensions are taken from Chapter 2
For large inclusions, the model produces reasonable values that are
close to the Minnaert resonance. This is consistent with the experimental
and FEA data presented in Chapter 2. As the inclusion gets smaller in size
(above 500 Hz), the resonances begin to significantly deviate from the Min-
naert approximation. It is believed that this is due to the aspect ratio between
membrane thickness, plastic thickness, and hole radius. This effect is investi-
gated in detail in the following section.
91

B.3 Effect of Membranes and Aspect Ratios
What effect does the presence of the membrane have on the resonance
of the system? Using the simple equivalent circuit model developed in this
appendix, the membrane can effectively be removed from the system by setting
the membrane stiffness and mass in Eq. (B.1) to zero. Eq. (B.1) becomes
Zmem = Zrad + jωMair. (B.13)
For all cases, the effective input impedance has the same characteristics
as that shown in Fig. B.5. The resonance frequency of each unit cell without
the membrane present is shown in Table B.2.
fMinnaert (Hz) a (m) fCircuit (Hz)100 0.0853 125200 0.0301 211300 0.0164 285.8400 0.0107 353.9500 0.0076 419.9600 0.0058 480.6700 0.0046 539.6800 0.0038 593.6900 0.0032 646.81000 0.0023 767.7
Table B.2: Resonance results from the input impedance as determined by thecircuit model without the membrane present.
Table B.2 shows that the resonance frequency of each unit cell above
500 Hz is shifted significantly down from the Minnaert resonance. While these
numbers are in the correct range (compared to the values give in Table B.1),
92

they do not accurately model the system. Perhaps, then, the dominating
effect is not the presence of the membrane but the aspect ratio of either the
membrane thickness to the radius of inclusion, or the POM plastic thickness
to the radius of the inclusion.
To investigate these effects, the data presented in Section B.2 are cal-
culated based on the experimental dimensions of the unit cell, which do not
adhere to the aspect ratio, given first by Eq. (2.20), but now using the con-
vention from Fig. B.1 that the height of the delrin is given by h′,
a
h′≈ 2.4. (B.14)
By imposing this aspect ratio, the radius of the inclusion and the thick-
ness of the Delrin center layer are altered from their experimental values pre-
sented in Chapter 2. The new values for radius and thickness are presented
in Table B.3, along with the resonance frequency determined by the analyt-
ical model both with and without the membrane present. Figures showing
the input impedance are not shown for all cases because they follow the same
characteristics shown in Fig. B.5.
93

fMinnaert (Hz) a (m) h’ (m) fCircuit (Hz) fCircuit,NoMembrane (Hz)100 0.0480 0.0200 94.1 94.1200 0.0240 0.0100 189.2 188.1300 0.0160 0.0067 287.6 282.2400 0.0120 0.0050 393.3 376.3500 0.0096 0.0040 511.0 470.4600 0.0080 0.0033 646.4 564.4700 0.0069 0.0029 805.1 658.4800 0.0060 0.0025 992.5 752.6900 0.0053 0.0022 1213 846.61000 0.0048 0.0020 1470 940.6
Table B.3: Resonance results from the input impedance as determined by thecircuit model of a unit cell with a modified aspect ratio for the thickness ofthe Delrin, both with and without a membrane present.
It is clear from the data in Table B.3 that above 500 Hz a component of
the membrane significantly shifts the resonance frequency. It is possible that
this shift is related to the aspect ratio between the thickness of the neoprene (h,
as shown in Fig. B.1) and the radius of the inclusion. For the cases where the
analytical model closely matches the experimental data, as shown in Fig. B.5,
the aspect ratio is on average
a
h≈ 50. (B.15)
Imposing the aspect ratios given in Eq. (B.14) and Eq. (B.15) gives the
unit cell the dimensions given in Table B.4. The resonance frequencies for this
system are also given in Table B.4.
94

fMinnaert (Hz) a (m) h’ (m) h (m) fCircuit (Hz)100 0.0480 0.0200 0.00096 94.2200 0.0240 0.0100 0.00048 188.4300 0.0160 0.0067 0.00032 282.6400 0.0120 0.0050 0.00024 376.7500 0.0096 0.0040 0.00019 470.9600 0.0080 0.0033 0.00016 565.1700 0.0069 0.0029 0.00013 659.2800 0.0060 0.0025 0.00012 753.5900 0.0053 0.0022 0.00010 847.61000 0.0048 0.0020 0.00009 941.8
Table B.4: Resonance results from the input impedance as determined by thecircuit model of a unit cell with a modified aspect ratio for the thickness ofthe Delrin and the thickness of the membrane.
These values are closer to the Minnaert resonance across the entire
range of unit cell sizes. Please note that for the experimental data (where
a close match is seen in the 100 Hz and 200 Hz cases) the aspect ratios of
Eq. (B.14) and Eq. (B.15) were not enforced.
The analytical model presented above has shown that to maintain a res-
onance frequency near the Minnaert resonance, the aspect ratios of Eq. (B.14)
and Eq. (B.15) should be enforced. Additionally, the model has matched ex-
perimentally determined resonance frequencies for the case of the 100 Hz and
200 Hz unit cell. Ultimately, this investigation of an analytical model for the
system has provided a way to analyze the effect of unit cell dimensions and
properties. This simple design tool may be helpful in future application of
these deeply sub-wavelength panels.
95

B.4 MATLAB Code
The code below shows the full code used to analyze the circuit model
described in Section B.1.
1 clear all; close all; clc;2
3 %attempt at graphing the impedance calculated from the ...circuit model to
4 %find the zeros (resonance frequencies)5
6 %Define Material properties7 a = 0.0853;8
9 %Delrin10 E del = 3.2E9;11 nu del = 0.35;12 rho del = 1.410;13 h del = 0.00635;14
15 %Neoprene16 E neo = 0.01E9;17 nu neo = 0.49;18 rho neo = 1.400;19 h neo = 0.0008;20 c neo = sqrt((E neo/(3*(1-2*nu neo)))/rho neo);21
22 %Water23 rho water = 998;24 c water = 1498;25
26 %Air27 rho air = 1.21;28 c air = 343;29 K air = (rho air*c airˆ2);30
31 %Compliances32 M mem = (1.8830*rho neo*h neo)/(pi*aˆ2);33 C mem = (pi*aˆ6)/(195.1*(E neo*(h neoˆ3)/(12*(1-(nu neoˆ2)))));34 C air = (pi*aˆ2*h del)/K air;35 M air = (rho air*h del)/(2*pi*aˆ2);
96

36 C walls = ((1+nu delˆ2)/E del)*aˆ2*h del*pi;37
38 %Radiation Impedance39 Z rad = @(w) ((rho water.*c water)./(pi.*aˆ2)).*( ...
((w.ˆ2.*a.ˆ2)./(2.*c water.ˆ2)) + ...j.*((8.*w.*a)/(3.*pi.*c water)) );
40
41 %Membrane Impedance (comment out whichever you are not ...plotting at the
42 %time)43 %Z mem = @(w) Z rad(w)+(j.*w.*M air);44 Z mem = @(w) ...
Z rad(w)+(j.*w.*M mem)+(1./(j.*w.*C mem))+(j.*w.*M air);45
46 Z input = @(w) (1./(j.*w.*C air)) + ((2./Z mem(w)) + ...(j.*w.*C walls)).ˆ-1;
47
48 %Define velocities49 u mem = @(w) ( (Z input(w) - ...
(1./(j.*w.*C air)))./(Z input(w)) ) ./ Z mem(w);50 u walls = @(w) ( (Z input(w) - ...
(1./(j.*w.*C air)))./(Z input(w)) ) ./ (2./(j.*w.*C walls));51 u tot = @(w) Z input(w).ˆ-1;52 %%53 %Define Freq range54 f = 0:0.1:250;55 x = 2.*pi.*f;56
57 %Plot as desired
97

Bibliography
[1] A. Popper and A. Hawkins, The Effects of Noise on Aquatic Life (Springer
Science & Business Media, New York, NY) (2012).
[2] J. A. Hildebrand, “Anthropogenic and natural sources of ambient noise
in the ocean”, Marine Ecology Progress Series 395, 5–20 (2009).
[3] C. R. Greene, “Characteristics of oil industry dredge and drilling sounds
in the Beaufort Sea”, The Journal of the Acoustical Society of America
82, 1315–1324 (1987).
[4] A. Popper and M. Hastings, “The effects of anthropogenic sources of
sound on fishes”, Journal of Fish Biology 75, 455–489 (2009).
[5] A. R. Scholik and H. Y. Yan, “Effects of Boat Engine Noise on the Au-
ditory Sensitivity of the Fathead Minnow, Pimephales promelas”, Envi-
ronmental Biology of Fishes 63 (2002).
[6] T. R. Asplund, “The Effects of Motorized Watercraft on Aquatic Ecosys-
tems”, Wisconsin Department of Natural Resources and University of
Wisconsin-Madison Water Chemistry Program PUBL–SS–948–00 (2000).
[7] M. Minnaert, “On musical air bubbles and the sounds of running water”,
Phil Mag 16, 235–248 (1933).
98

[8] T. Leighton, The Acoustic Bubble (Academic Press, Waltham, MA) (2012).
[9] K. W. Commander and A. Prosperetti, “Linear pressure waves in bubbly
liquids: Comparison between theory and experiments”, The Journal of
the Acoustical Society of America 85, 732–746 (1989).
[10] S. G. Kargl, “Effective medium approach to linear acoustics in bubbly
liquids”, The Journal of the Acoustical Society of America 111, 168–173
(2002).
[11] C. C. Church, “The effects of an elastic solid surface layer on the ra-
dial pulsations of gas bubbles”, The Journal of the Acoustical Society of
America 97, 1510–1521 (1995).
[12] K. M. Lee, K. T. Hinojosa, M. S. Wochner, T. F. Argo, and P. S. Wil-
son, “Mitigation of low-frequency underwater sound using large encapsu-
lated bubbles and freely-rising bubble clouds”, Proceedings of Meetings
on Acoustics 12, 070006 (2011).
[13] K. M. Lee, K. T. Hinojosa, M. S. Wochner, T. F. Argo, P. S. Wilson,
and R. S. Mercier, “Sound propagation in water containing large tethered
spherical encapsulated gas bubbles with resonance frequencies in the 50
Hz to 100 Hz range”, The Journal of the Acoustical Society of America
130, 3325–3332 (2011).
[14] K. M. Lee, P. S. Wilson, and M. S. Wochner, “Attenuation of standing
waves in a large water tank using arrays of large tethered encapsulated
99

bubbles”, The Journal of the Acoustical Society of America 135, 1700–
1708 (2014).
[15] K. M. Lee, A. R. McNeese, L. M. Tseng, M. S. Wochner, and P. S. Wilson,
“Measurements of resonance frequencies and damping of large encapsu-
lated bubbles in a closed, water-filled tank”, Proceedings of Meetings on
Acoustics 18, 075003 (2014).
[16] B. Wursig, C. R. Greene Jr., and T. A. Jefferson, “Development of an air
bubble curtain to reduce underwater noise of percussive piling”, Marine
Environmental Research 49, 79–93 (2000).
[17] S. N. Domenico, “Acoustic wave propagation in air-bubble curtains in
water; Part II, Field experiment”, Geophysics 47, 354–375 (1982).
[18] Y. Xiao, J. Wen, and X. Wen, “Sound transmission loss of metamaterial-
based thin plates with multiple subwavelength arrays of attached res-
onators”, Journal of Sound and Vibration 331, 5408–5423 (2012).
[19] Z. Yang, H. M. Dai, N. H. Chan, G. C. Ma, and P. Sheng, “Acoustic
metamaterial panels for sound attenuation in the 50-1000 Hz regime”,
Applied Physics Letters 96, 041906 (2010).
[20] C. J. Naify, C. M. Chang, G. McKnight, and S. Nutt, “Transmission
loss and dynamic response of membrane-type locally resonant acoustic
metamaterials”, Journal of Applied Physics 108, 114905 (2010).
100

[21] P. Li, S. Yao, X. Zhou, G. Huang, and G. Hu, “Effective medium theory of
thin-plate acoustic metamaterials”, The Journal of the Acoustical Society
of America 135, 1844–1852 (2014).
[22] M. B. Assouar, M. Senesi, M. Oudich, M. Ruzzene, and Z. Hou, “Broad-
band plate-type acoustic metamaterial for low-frequency sound attenua-
tion”, Applied Physics Letters 101, 173505 (2012).
[23] J. Christensen, L. Martn-Moreno, and F. J. Garca-Vidal, “All-angle block-
age of sound by an acoustic double-fishnet metamaterial”, Applied Physics
Letters 97, 134106 (2010).
[24] T. Klatt and M. R. Haberman, “A nonlinear negative stiffness metamate-
rial unit cell and small-on-large multiscale material model”, Journal of Ap-
plied Physics 114, 033503 (2013), URL http://scitation.aip.org/content/aip/journal/jap/114/3/10.1063/1.4813233.
[25] V. Leroy, A. Bretagne, M. Fink, H. Willaime, P. Tabeling, and A. Tourin,
“Design and characterization of bubble phononic crystals”, Applied Physics
Letters 95, 171904 (2009).
[26] V. Leroy, A. Strybulevych, M. Lanoy, F. Lemoult, A. Tourin, and J. Page,
“Superabsorption of acoustic waves with bubble metascreens”, Physical
Review B 91, 020301 (2015).
[27] W. Kuhl, E. Meyer, H. Oberst, E. Skudrzyk, and K. Tamm, Sound Ab-
sorption and Sound Absorbers in Water. (DynamicProperties of Rubber
101

and Rubberlike Substances in the Acoustic Frequency Region), volume 1
(Dept. of the Navy Bureau of Ships, Washington, D.C.) (1947).
[28] H. Meng, J. Wen, H. Zhao, L. Lv, and X. Wen, “Analysis of absorption
performances of anechoic layers with steel plate backing”, The Journal of
the Acoustical Society of America 132, 69–75 (2012).
[29] H. Meng, J. Wen, H. Zhao, and X. Wen, “Optimization of locally resonant
acoustic metamaterials on underwater sound absorption characteristics”,
Journal of Sound and Vibration 331, 4406–4416 (2012).
[30] S. Ivansson, “Numerical modeling for design of viscoelastic coatings with
favorable sound absorbing properties”, Nonlinear Analysis: Theory, Meth-
ods & Applications 63, e1541–e1550 (2005).
[31] S. Ivansson, “Sound absorption by viscoelastic coatings with periodically
distributed cavities”, The Journal of the Acoustical Society of America
119, 3558–3567 (2006).
[32] S. Ivansson, “Numerical design of Alberich anechoic coatings with superel-
lipsoidal cavities of mixed sizes”, The Journal of the Acoustical Society
of America 124, 1974–1984 (2008).
[33] Y. A. Ilinskii, E. A. Zabolotskaya, T. A. Hay, and M. F. Hamilton, “Mod-
els of cylindrical bubble pulsation”, The Journal of the Acoustical Society
of America 132, 1346–1357 (2012).
102

[34] D. C. Calvo, A. L. Thangawng, and C. N. Layman, “Low-frequency reso-
nance of an oblate spheroidal cavity in a soft elastic medium”, The Journal
of the Acoustical Society of America 132, EL1–EL7 (2012).
[35] X. Geng, H. Yuan, H. N. Oguz, and A. Prosperetti, “The oscillation of gas
bubbles in tubes: Experimental results”, The Journal of the Acoustical
Society of America 106, 674–681 (1999).
[36] H. N. Oguz and A. Prosperetti, “The natural frequency of oscillation of
gas bubbles in tubes”, The Journal of the Acoustical Society of America
103, 3301–3308 (1998).
[37] M. Strasberg, “The Pulsation Frequency of Nonspherical Gas Bubbles in
Liquids”, The Journal of the Acoustical Society of America 25, 536–537
(1953).
[38] R. D. Knight, Physics for Scientists and Engineers: A Strategic Approach
(Pearson College Division, New York, NY) (2007).
[39] A. R. Kaiser, C. A. Cain, E. Y. Hwang, J. B. Fowlkes, and R. J. Jeffers,
“A cost–effective degassing system for use in ultrasonic measurements:
The multiple pinhole degassing system”, The Journal of the Acoustical
Society of America 99, 3857–3859 (1996).
[40] J. N. Reddy, An Introduction to the Finite Element Method (McGraw-
Hill, New York, NY) (2006).
103

[41] L. Meirovitch, Fundamentals of Vibrations (Waveland Press, Long Grove,
IL) (2010).
[42] C. A. Harper, Modern Plastics Handbook (McGraw-Hill, New York, NY)
(2000).
[43] J. A. Brydson, Plastics Materials (Butterworth-Heinemann, Oxford, UK)
(1999).
[44] P. A. Ciullo and N. Hewitt, The Rubber Formulary (William Andrew,
Norwich, NY) (1999).
[45] R. N. Capps, “Elastomeric Materials for Acoustical Applications”, Naval
Sea Systems Command, ONR AD–A216 872 (1989).
[46] S. Marburg, “Six boundary elements per wavelength: is that enough?”,
Journal of Computational Acoustics 10, 25–51 (2002).
[47] S. Marburg and B. Nolte, eds., Computational Acoustics of Noise Prop-
agation in Fluids - Finite and Boundary Element Methods, 1st edition
(Springer, New York, NY) (2008).
[48] D. T. Blackstock, Fundamentals of Physical Acoustics (John Wiley &
Sons, New York, NY) (2000).
[49] E. Skudrzyk, The Foundations of Acoustics: Basic Mathematics and Ba-
sic Acoustics (Springer-Verlag, Heidelberg, Germany) (1971).
104

[50] N. C. Skaropoulos, H. D. Yagridou, and D. P. Chrissoulidis, “Interactive
resonant scattering by a cluster of air bubbles in water”, The Journal of
the Acoustical Society of America 113, 3001–3011 (2003).
[51] C. Feuillade, “The attenuation and dispersion of sound in water con-
taining multiply interacting air bubbles”, The Journal of the Acoustical
Society of America 99, 3412–3430 (1996).
[52] G. Kapodistrias and P. H. Dahl, “Effects of interaction between two bub-
ble scatterers”, The Journal of the Acoustical Society of America 107,
3006–3017 (2000).
[53] F. Bongard, H. Lissek, and J. R. Mosig, “Acoustic transmission line meta-
material with negative/zero/positive refractive index”, Physical Review
B 82, 094306 (2010).
[54] M. H. Sadd, Elasticity: Theory, Applications, and Numerics (Academic
Press, Waltham, MA) (2010).
105

Vita
Ashley Jean Hicks is originally from Hot Springs, Arkansas. She at-
tended the University of Central Arkansas for her undergraduate studies. In
2013, she graduated Magna Cum Laude with a bachelor’s degree in Physics
and minors in Mathematics and Interdisciplinary Studies. She participated
in several research experiences throughout her undergraduate career and fol-
lowed her interest in acoustics to The University of Texas at Austin, where
she completed her Master of Science in Engineering in 2015.
Permanent address: [email protected]
This thesis was typeset with LATEX† by the author.
†LATEX is a document preparation system developed by Leslie Lamport as a specialversion of Donald Knuth’s TEX Program.
106