Embed Size (px)
Citation preview

COOPERATIVE LOCALIZATION AND
BATHYMETRY-AIDED NAVIGATION OF
AUTONOMOUS MARINE SYSTEMS
GAO RUI
(B.Eng.(Hons), M.Eng, NUS)
A THESIS SUBMITTED
FOR THE DEGREE OF DOCTOR OF PHILOSOPHY
DEPARTMENT OF ELECTRICAL AND COMPUTER
ENGINEERING
NATIONAL UNIVERSITY OF SINGAPORE
2019
Supervisor:
Associate Professor Mandar Chitre
Examiners:
Associate Professor Abdullah Al Mamun
Associate Professor Chew Chee Meng
Associate Professor Nikola Miskovic, University of Zagreb

Declaration
I hereby declare that this thesis is my original work and it has been
written by me in its entirety. I have duly acknowledged all the sources of
information which have been used in the thesis.
This thesis has also not been submitted for any degree in any university
previously.
Gao Rui
July 15, 2019
i

Acknowledgements
This dissertation would not be possible without the assistance of many
people. I am very fortunate to be associated with them and would like to
take this opportunity to express my gratefulness and appreciation to them
in this acknowledgement.
First and foremost, I would like to thank my supervisor Assoc. Prof. Man-
dar Chitre who introduced me to underwater navigation. He not only pro-
vided the patient guidance and valuable suggestions but more importantly
supported and encouraged me throughout the course. He has my utmost
respect and gratitude for understanding and believing in me, especially
when I was overwhelmed with my family commitment.
This dissertation was built on the project - STARFISH AUV1 at ARL2,
NUS. I would like to extend my gratitude to my colleagues and friends
at ARL. I am grateful for the opportunity for working with and being
surrounded by great people. I am honored to be part of an outstanding
team. Thanks go to Ms. Ong Lee Lin for her help and guidance in my
research writing.
Last but not least, I want to thank my husband, Chew Jee Loong, and
my loving parents. This journey would not have been possible without their
understanding and support. My deepest gratitude goes to my dear mother
for her unconditional love, encourage, and all the sacrifices she has made
for me. I shall also mention my two kids, Amelie and Andrew, who always
make my day full of joy and happiness.
1Small Team of Autonomous Robotic “Fish” (STARFISH)2Acoustic Research Laboratory (ARL), Tropical Marine Science Institute (TMSI),
National University of Singapore (NUS) - http://www.arl.nus.edu.sg
ii

iii

Contents
Declaration i
Acknowledgements ii
Summary vii
List of Tables ix
List of Figures x
List of Symbols xvii
Acronyms xix
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Thesis Contribution and List of Publications . . . . . . . . . 7
1.3 Related Publications . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Thesis Layout . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Background 10
2.1 AUVs and Localization . . . . . . . . . . . . . . . . . . . . . 10
2.2 Beacon-Based Localization . . . . . . . . . . . . . . . . . . . 14
2.3 Cooperative Localization . . . . . . . . . . . . . . . . . . . . 15
2.4 Dealing with Unknown Correlation . . . . . . . . . . . . . . 19
2.5 Bathymetry-Aided Navigation . . . . . . . . . . . . . . . . . 22
3 Distributed Localization in a Cooperative Team 25
3.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Decentralized Cooperation with Limited Communication . . 26
3.2.1 Self-Propelled Particles (SPP) and Swarm AUVs . . 26
3.2.2 Small Team of AUVs . . . . . . . . . . . . . . . . . . 31
iv

Contents v
3.3 Information Loss in Distributed Processing . . . . . . . . . . 46
3.4 Distributed Extended Information Filter . . . . . . . . . . . 52
3.4.1 Illustrative Examples . . . . . . . . . . . . . . . . . . 53
3.4.2 Formulation and Design . . . . . . . . . . . . . . . . 56
3.4.3 Simulation Studies Using Field Experiment Data . . 64
3.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4 When Can One Ignore the Correlation? 72
4.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Multi-Sensor Tracking Problem . . . . . . . . . . . . . . . . 73
4.2.1 Optimal Distributed Filtering . . . . . . . . . . . . . 77
4.2.2 When Can One Ignore the Correlation? . . . . . . . . 83
4.2.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . 88
4.3 Multi-Vehicle Localization . . . . . . . . . . . . . . . . . . . 88
4.3.1 Information Flow when Ignoring Correlation . . . . . 90
4.3.2 Multi-Vehicle Localization with Bathymetric Aids . . 105
4.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5 Localization with Bathymetric Aids 115
5.1 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . 115
5.2 Probability Map Based Localization . . . . . . . . . . . . . . 116
5.2.1 Grid-Based Markov Localization . . . . . . . . . . . . 117
5.2.2 Particle Filtering and Multiple Hypotheses . . . . . . 121
5.3 Information Entropy Map . . . . . . . . . . . . . . . . . . . 124
5.3.1 Grid-based Discrete Entropy . . . . . . . . . . . . . . 125
5.3.2 Particle Filter Based Entropy . . . . . . . . . . . . . 128
5.3.3 Empirical Convergence and Contributing Factors . . 129
5.3.4 Localization Performance . . . . . . . . . . . . . . . . 132
5.3.5 Information Entropy Map Based on Different Priors . 137
5.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6 Navigation with Bathymetric Aids 142
6.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . 142
6.2 Approximate Dynamic Programming . . . . . . . . . . . . . 143
6.3 Iterative Path Planning Algorithm . . . . . . . . . . . . . . 145
6.3.1 Policy Generation . . . . . . . . . . . . . . . . . . . . 146
6.3.2 Policy Evaluation . . . . . . . . . . . . . . . . . . . . 148
6.3.3 The Policy Iteration Algorithm . . . . . . . . . . . . 149
6.4 Gaussian Process Regression for Path Planning . . . . . . . 150
6.5 Simulation and Performance . . . . . . . . . . . . . . . . . . 153
6.5.1 Underwater Vehicle Navigation . . . . . . . . . . . . 153
6.5.2 Mission 1 . . . . . . . . . . . . . . . . . . . . . . . . 153

Contents vi
6.5.3 Mission 2 . . . . . . . . . . . . . . . . . . . . . . . . 156
6.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7 Conclusions and Future Work 161
Bibliography 165

Summary
In monitoring and surveillance, localization and navigation is especially
important for underwater autonomous vehicles (AUVs) since GPS and ra-
dio signals are not accessible in most of the missions. A cooperative team
formed by multiple autonomous vehicles has gained increasing interests as
it offers more efficiency and reliability than a single vehicle. Much work
has been done in the area of underwater localization and navigation with
the aids from beacons with known positions. This dissertation focuses on a
team of low-cost AUVs where no one has precise position. With the ability
to communicate and make relative measurements from each other, vehi-
cles share information across the team and cooperate to complete complex
missions. The information shared among vehicles helps improve the overall
performance. However, unlike terrestrial communication links, underwa-
ter acoustic channel has inherent constraints such as high latency, limited
bandwidth and low reliability. In such a case, a distributed processing
architecture with minimum inter-vehicle communications is preferred. At
the same time, the severe underwater communication issues also impose
challenges on the distributed processing. We show the benefit introduced
through cooperation and the issue imposed by communication constraints
on the distributed processing. We propose a feasible design of the dis-
tributed localization for a team of cooperative AUVs. The algorithm is
robust to packet loss, outperforms single-vehicle localization and requires
minimum communications.
In the next step, we look at a simplified naıve assumption in underwa-
ter multi-sensor tracking and multi-vehicle localization. This assumption
naıvely assumes information from different sources are independent of each

Summary viii
other. We justify the assumption and answer when the assumption is good
to use. With the justification, we move on to single-vehicle bathymetry-
aided navigation as it can be safely extended to cooperative multi-vehicle
navigation with bathymetric aids.
Bathymetry map indicating the water depth offers an attractive tool
to reduce the localization error of the submerged vehicles. With bathy-
metric measurements incorporated, we study the a posteriori description
of the localization uncertainty using probabilistic methods. An informa-
tion theoretical approach is used to describe the localization uncertainty.
With this information theory measure, we build information entropy map
and demonstrate how the bathymetry helps with different localization pri-
ors. Subsequently, a bathymetry-aided navigation is proposed to ensure a
good localization at the destination. We formulate the path planning and
solve it as an optimization problem. The algorithm is tested using real-
world bathymetric data. Simulations show that near-optimal paths with
good localization accuracy at the destination are generated within a few
iterations.

List of Tables
3.1 Pairing Sequence for Ranging Update . . . . . . . . . . . . . 42
ix

List of Figures
3.1 Smaller update interval and less packet loss lead to better
group heading alignment. . . . . . . . . . . . . . . . . . . . . 28
3.2 AUV aggregation at update interval δT = 30 seconds: smaller
packet loss results in faster convergence of the group coverage. 30
3.3 Average Error in Distance of 3 AUVs with various loss rate
pL: When packet loss is less, DKF improves localization
through cooperation. When packet loss is higher, DKF im-
proves localization at first but later deteriorates fast. . . . . 39
3.4 Estimation error of AUV 4 gets corrected once it reconnects
with the other AUVs after 30 seconds. . . . . . . . . . . . . 43
3.5 Logs of past Np = 5 rangings are able correct the DEKF and
give similar result to CEKF. . . . . . . . . . . . . . . . . . . 44
3.6 Central processing architecture vs. distributed processing
architecture. CKF fuses the raw measurements directly while
DKF fuses the local processed data. . . . . . . . . . . . . . . 47
x

List of Figures xi
3.7 Estimation error squared versus initial correlation coefficient.
DKF has larger error covariance than CKF except when ini-
tial correlation coefficient is 0. . . . . . . . . . . . . . . . . . 49
3.8 Traditional distributed processing (DKF) performs poorly as
compared to centralized processing (CKF), but our proposed
distributed method (DEIF) is able to perform well. . . . . . 54
3.9 Estimation error of AUV 1 using various filters in a 3-AUV
cooperative localization example. DEIF is close to CKF. . . 55
3.10 Illustration of incorporating delta information in simple ad-
dition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.11 Cooperative localization results with field data. . . . . . . . 65
3.12 Simulation results for Vehicle 3 at packet loss rate (a) pl = 0
(b) pl = 0.3 (c) pl = 0.6 and (d) pl = 0.9. The vertical arrows
show the time when Vehicle 3 receives broadcast. DEIF has
smaller estimation error than SKF and SCI filters, and better
consistency than NKF. . . . . . . . . . . . . . . . . . . . . . 67
3.13 Cooperative localization results with field data. The arrows
indicate the time when the broadcasts are sent and success-
fully received by other vehicles. NKF estimation sometimes
is worse than SKF. DEIF improves estimation accuracy of
all vehicles. . . . . . . . . . . . . . . . . . . . . . . . . . . . 70

List of Figures xii
4.1 Multi-sensor tracking: a recursive two-step flow chart. The
target propagates from previous position xk to current po-
sition xk+1 with some propagation noise ωk. At each step,
each node makes an observation (z(1) or z(2)) about the tar-
get position. . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.2 Multi-sensor tracking: distributed filtering using weighted-
sum fusion. . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.3 One-step error covariances of DF, SF, CF and SVF, against
the weight λ used by DF. There is a gap between CF and
optimal DF (SVF). . . . . . . . . . . . . . . . . . . . . . . . 80
4.4 Ratio of error covariances - optimal DF (SVF) to CF is no
larger than one. . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.5 One-step performance: the dangerous region of implement-
ing NF (assuming R(1) < R(2)). . . . . . . . . . . . . . . . . 85
4.6 Naıve filter in stable state: (a) Actual error covariance is
smaller than SF. (b) Actual error covariance eventually gets
worse than SF. In both cases, NF is overconfident about its
estimation. The estimated error covariance by NF is even
lower than the one by CF. . . . . . . . . . . . . . . . . . . . 86
4.7 Asymptotic performance: the dangerous region of imple-
menting NF (assuming R(1) ≤ R(2)). . . . . . . . . . . . . . 87

List of Figures xiii
4.8 Bayesian network for cooperative localization of two vehi-
cles: shaded nodes are observations and white nodes are
unobserved position state variables. . . . . . . . . . . . . . . 89
4.9 Full graph vs. Unwrapped graph with information double
counting for k = 1, 2: the prime symbol indicates the repli-
cation of nodes. . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.10 Case 1: Pk = 5,Q = 10,R(1) = 1,R(2) = 2. When rang-
ing error approaches 0, the two estimates are about fully
correlated with similar error covariances after cooperation. . 108
4.11 Case 2:Pk = 5,Q = 1,R(1) = 10,R(2) = 40. When rang-
ing error approaches 0, the two estimates are about fully
correlated with similar error covariances after cooperation. . 109
4.12 One-step Performance: The dangerous region of implement-
ing NF in multi-vehicle localization. (R(2) > R(1)) . . . . . . 112
4.13 Naıve filter in stable state: One can ignore the correlation in
Case (b) and Case (c) but NF becomes detrimental in Case
(a). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.14 Asymptotic Performance: The dangerous region of imple-
menting NF in multi-vehicle localization. The three cases in
Figure 4.13are located in the regions. . . . . . . . . . . . . . 114
5.1 Bathymetry map near St. John Island, Singapore. Circles:
Path 1 (Speed 2 m/s). Crosses: Path 2 (Speed 1.41m/s). . . 118

List of Figures xiv
5.2 Grid-based Markov localization with measurement updates.
Yellow crosses: top 5 possible locations. Cyan circles: true
path. Green square: estimated locations with top possibility. 119
5.3 Depth measurements along two paths. . . . . . . . . . . . . 120
5.4 Particle filter localization with measurement updates for Path
1. Black circles: true path. Cyan regions: distribution of
particles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.5 Gaussian mixture model estimated by EM method. . . . . . 123
5.6 Gaussian random walk process: Estimation error is reduced
at every measurement update. . . . . . . . . . . . . . . . . . 130
5.7 Gaussian random walk process: PF-based Entropy and grid-
based discrete entropy, versus theoretical entropy. Vertical
red lines: time steps when measurements are available. Ver-
tical green dashed lines: time steps when particles are re-
sampled. Grid-based entropy is more sensitive to particle
numbers and estimation error values. . . . . . . . . . . . . . 131
5.8 PF-based entropy versus grid-based discrete entropy: Grid-
based discrete entropy varies more, with respect to particle
number. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.9 The entropy of the particles in a bathymetric navigation par-
ticle filter depends on the path taken from source to desti-
nation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134

List of Figures xv
5.10 Although Path B takes a detour and therefore longer time
to reach the destination, the localization error of Path B is
much smaller than a that of a straight line by Path A. . . . 136
5.11 Information entropy map for different areas: Different prior
distributions yield different conditional entropy values. . . . 138
5.12 Information entropy map based on different Gaussian priors:
It is good to have more bathymetry variation in the direction
where the larger uncertainty of the Gaussian prior lies. . . . 140
6.1 Flowchart of iterative path planning algorithm. . . . . . . . 145
6.2 Action space for policy generation: The next waypoints from
action set include all possible map grids when looking at the
destination. . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
6.3 Illustration of Gaussian process regression in 1-dimensional
space. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.4 Mission 1: As the algorithm iterates, the planned path evolves
to one with more bathymetric variation. . . . . . . . . . . . 154
6.5 Mission 1: Performance at the destination. . . . . . . . . . . 155
6.6 Mission 2: In the first three iterations, planned path evolves
to one side of the bathymetry basin. From the fourth it-
eration, the planned path evolves to the other side of the
basin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.7 Mission 2: Performance at the destination. . . . . . . . . . . 158

List of Figures xvi
6.8 Illustration of Gaussian process regression in 1-dimensional
space. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159

List of Symbols
k time step k, used as subscript for other symbols
xk position state at time step k
ak action directing vehicle movement at time step k
F Jacobian matrix of evolution model
H Jacobian matrix of measurement model
Bk control matrix at time step k
uk control input at time step k
zk measurement or observation at time step k
Z1:k series of measurements from time step 1 to k
rk range measurement at time step k
ωk system evolution noise
Qk covariance of system evolution noise
νk measurement noise
υk range measurement noise
R covariance of measurement noise
Rr covariance of ranging error
xk,yk position estimate of true position state xk
Pk error covariance of the position estimate
δT measurement update interval
xvii

List of Symbols xviii
pL communication packet loss rate
Np number of past updates
Λk precision matrix or information matrix
ηk information vector
Ox State mapping matrix
Oy Observation mapping matrix
E Error matrix

Acronyms
AUV Autonomous Underwater Vehicle
BAN Bathymetry Aided Navigation
CKF Centralized Kalman Filter
DF Distributed Filter
DoF Degree-of-Freedom
DR Dead Reckoning
DVL Doppler Velocity Log
EKF Extended Kalman Filter
EIF Extended Information Filter
GIB GPS Intelligent Buoys
GMM Gaussian Mixture Model
INS Intertial Navigation System
KF Kalman Filter
LBL Long Base Line
MAP Maximum A Posteriori
ML Maximum Likelihood
NEES Normalized Estimation Error Sqaured
NKF Naıve Kalman Filter
PDF Probabilistic Density Function
xix

Acronyms xx
PF Particle Filter
PV Peer Vehicle
RMSE Root Mean Square Error
RV Receiving Vehicle
(U)SBL (Ultra) Short Base Line
SCI Split Covariance Intersection
SI Swarm Intelligence
SPP Self-Propelled Particles
SVF State Vector Fusion

Chapter 1
Introduction
1.1 Motivation
The past decade has seen a significant increase in interest in the use of
autonomous underwater vehicles (AUVs) for maritime operations. AUVs
reach shallower water than boats, and greater depths than human divers or
tethered vehicles. Once deployed and submerged, AUVs are safe from bad
weather and heavy traffic on the surface. Extensive research has been con-
ducted on AUVs and several commercial AUVs have been developed and
tested [21, 48, 50]. One of the challenges that all AUVs have to contend
with is that of underwater localization and navigation, since GPS signals
cannot be received underwater. For missions such as mapping, target iden-
tification, sensing and surveying, underwater localization and navigation
1

Chapter 1. Introduction 2
are the key components that determine the performance of an autonomous
mission.
Traditionally an AUV localizes itself using the vehicle’s own sensor
data, such as GPS (whenever available), compass and depth sensor. In
order to obtain good localization, AUVs are often equipped with high-end
navigation systems such as Doppler velocity log (DVL) and inertial nav-
igation system (INS). Packed together with other sensors for the mission
(for example, sensors for monitoring and surveying), AUVs become bulky
in size and high in cost. Another way to achieve the vehicle’s localiza-
tion accuracy is to utilize the communication with beacons with known
positions. The distance from AUV to a beacon can be measured by the
time-of-flight (TOF) of the acoustic signals. The relative orientation of the
AUV can be computed from a set of equations consisting of distances to all
available beacons [91] or the phase shift measured from the beacon array
[78]. Long Baseline (LBL) uses a sea-floor baseline transponder network
as navigation reference. It gives very high positioning accuracy and posi-
tion stability, but incurs high effort and cost to deploy and support this
substantial infrastructure. Other techniques such as Short Baseline (SBL),
Ultra Short Baseline (USBL) [57] and GPS Intelligent Buoys (GIB) [2] are
placed on sea surface. Localization with these setups can only be achieved
in certain restricted and designated areas due to the installation of these
external beacons. Some systems also assist the localization and navigation

Chapter 1. Introduction 3
with moving beacons such as those mounted on surface vessels [41, 64, 86]
or even other AUVs [72]. The operation of additional surface vessels is
not trivial; the horizontal coverage is also limited. The positions of beacon
AUVs need to be calibrated precisely.
In these respects, AUVs which are able to navigate without aids from
external setups or beacons and yet still maintain good localization with the
use of low-grade sensors, are preferred. This has motivated multi-vehicle
localization and navigation [20, 54, 72], and the use of bathymetric aids.
Multi-vehicle operation offers robustness to single-vehicle failure and
reduces the overall time and cost of acquiring data over large areas. We fo-
cus on a team of low-cost AUVs where no single AUV functions as a beacon
possessing accurate position. The team is able to outperform single-vehicle
operation, through sharing information among the team members. How-
ever, as compared to terrestrial communication links, underwater commu-
nication links typically are encumbered by limited bandwidth, high latency
and significant packet loss. It is impractical for a team of AUVs to collate
all sensor data centrally, and therefore a decentralized processing architec-
ture is preferred. However this opens up new challenges to team members
working in cooperation.
The first challenge lies in the limited communication bandwidth. As

Chapter 1. Introduction 4
mentioned, the multi-vehicle localization problem consists of a team of vehi-
cles cooperating and estimating their own positions. If the local sensor data
are accessible to a central processing unit, a central filtering yields the opti-
mal estimation on all vehicle positions. However, with limited bandwidth,
the size of underwater transmission packets is constrained. The information
shared between members is usually processed estimates rather than the raw
sensor data. A distributed filtering where members only process their local
sensor data and information communicated from others is commonly used.
An empirical study [80] showed that the available bandwidth in underwater
communication severely limits the performance of cooperative localization.
The second challenge pertains to tracking of the inter-vehicle correla-
tion. In the presence of unstable, irregular and lossy channels, the informa-
tion exchange between two vehicles may not be known to other members
in the team. Therefore the inter-vehicle correlation tends to be underes-
timated. A common practice is to naıvely assume independence during
information fusion between cooperative members. This assumption is not
always good. Overconfidence in estimation has been reported as a result
of double counting the common information [43]. This overconfidence pre-
vents utilization of subsequent useful measurements. To prevent informa-
tion double counting, author in [9] selectively incorporated information and
avoided the fusion of correlated data while keeping the positions of all vehi-
cles decorrelated. Other works assumed maximum correlation in the whole

Chapter 1. Introduction 5
state [15, 84, 92] or separated states [51]. These methods are conserva-
tive in handling the unknown inter-vehicle correlation, and typically yield
pessimistic estimates as the independent information is not fully utilized.
Based on the way that vehicles cooperate, a less conservative distributed
localization could be designed to record the correlated terms and require
minimum communications. Meanwhile, the naıve assumption which simply
ignores the correlation, has been used as a common practice as it imposes
minimum requirements on the processing and communication. One would
be interested to know how information double counting happens and when
the correlation in fusion can be ignored. The dangerous and safe regions of
naıve filtering should be quantified.
Incorporating information sensed from the natural environment helps
improve the localization without the need to establish extra physical infras-
tructure. Bathymetry map indicating the water depth offers an attractive
tool to reduce the localization error of the submerged vehicles. Reference
[80] presents a cooperative bathymetry-based localization approach for a
team of low-cost AUVs. It presents empirical analysis on the factors that
affect the filter performance. However, vehicle estimates are assumed to be
independent of each other as the author claims that the effect of correla-
tion is alleviated with bathymetry measurements. The amount of common
information fed back through the cooperation in the team is not addressed.
In our work, we justify this assumption through a careful analysis of the

Chapter 1. Introduction 6
effect of bathymetry aids in navigation. The advantage of bathymetric
aids is path dependent. It makes sense if vehicles are able to plan a path
such that a good localization can be ensured. It is generally believed that
localization performance depends on the rugosity of the sea bottom. Au-
thors in [47] show that the bathymetry variation is closely related to the
localization performance. Bathymetry variation is commonly used to guide
vehicles towards maximizing the bathymetric aids on localization. In [37],
heuristics were used to visit salient points (locations with more bathymetric
variation) for better localization. In [62], terrain dispersion, roughness and
terrain entropy were evaluated. However, the waypoints along the path
were selected manually. In [35], trajectories were generated by guiding ve-
hicles to avoid areas with smooth sea floor. In order to plan a path to
maximize the effect of bathymetric aids, we need to understand what kind
of bathymetry make good localization first. Is the bathymetry variation the
sufficient condition? How does one define a good localization? With these
answers, we propose a path planning algorithm to optimize the localization
performance with bathymetric aids.

Chapter 1. Introduction 7
1.2 Thesis Contribution and List of Publi-
cations
This thesis presents our work on cooperative localization and bathymetry-
aided navigation of autonomous marine systems, with AUVs being the
particular focus. The key contributions of this thesis are listed below:
1. Distributed localization is explored using a cooperating team of small-
sized, low-cost, sensor-limited AUVs. In the presence of underwater
communication challenges, we found that localization easily deterio-
rate when communication loss is high.
2. A new cooperative multi-vehicle localization algorithm using distributed
extended information filter (DEIF) is proposed. The proposed method
is effective in recording the correlated information in light of con-
strained underwater communication.
3. We answer the question as to when the correlation can be safely ig-
nored. The safe and dangerous regions for implementation of naıve fil-
tering in decentralized architecture are derived for multi-sensor track-
ing problem and multi-vehicle localization problem. The link between
these two problems is explained with formulations.
4. We formalize a concept of an information entropy map to quantify
the effectiveness of bathymetry measurements on localization.

Chapter 1. Introduction 8
5. A path planning algorithm is proposed for navigation with bathy-
metric aids. The algorithm generates near-optimal paths based on
bathymetric maps, with good localization accuracy generated at the
destination.
1.3 Related Publications
[1] R. Gao and M. Chitre, “Bathymetry-aided Navigation of Autonomous
Underwater Vehicles (AUVs)”, Manuscript in preparation for IEEE
Journal of Oceanic Engineering
[2] R. Gao and M. Chitre,“Path Planning for Bathymetry-aided Under-
water Navigation,” in Autonomous Underwater Vehicles (AUV 2018),
(Porto, Portugal), November 2018.
[3] R. Gao and M. Chitre, “On distributed processing for underwater
cooperative localization,” in 14th International Conference on Ubiq-
uitous Robots and Ambient Intelligence (URAI 2017), (Jeju, South
Korea), July 2017. (Invited).
[4] R. Gao and M. Chitre, “Cooperative Multi-AUV localization using
distributed extended information filter,” in Autonomous Underwater
Vehicles (AUV 2016), (Tokyo, Japan), pp. 206–212, November 2016.

Chapter 1. Introduction 9
1.4 Thesis Layout
This thesis is organized as follows.
Chapter 2 provides a brief discussion of related works in cooperative
localization and bathymetry-aided navigation. Chapter 3 presents the de-
centralized processing when vehicles cooperate with communication con-
straints. A novel distributed localization method is proposed. Chapter 4
answers the question of when the correlation can be safely ignored when
fusing estimates from different sources. The safe and dangerous regions
of implementing naıve filtering (ignoring correlation) are derived in two
applications. The bathymetry-aided localization is justified to be safe if
correlation is ignored in cooperation.
Chapter 5 illustrates localization with bathymetric aids using an in-
formation theoretic approach. In light of the entropy measure and the
relation to localization introduced in Chapter 5, a path planning algorithm
is proposed and tested through simulation in Chapter 6.
Chapter 7 summarizes the key findings in the research and makes sug-
gestions for future works.

Chapter 2
Background
2.1 AUVs and Localization
The words Positioning and localization are often used interchangeably in
literature. Positioning, although similar to localization, also has the con-
nection of placing the vehicle in a particular place. In this thesis, we will
use the word localization to mean the process of locating the vehicle, with
or without the reference of a map.
The sensors for underwater localization are categorized into two groups.
The first group of sensors do not require external infrastructure for localiza-
tion. For example, DVL measures vehicle speed relative to the seabed. A
microelectromechanical system (MEMS), usually called as compass, mea-
sures the vehicle’s 3-axis orientation. An inertial measurement unit (IMU)
10

Chapter 2. Background 11
provides the vehicle’s acceleration and angular rate with respect to the ve-
hicle’s body-frame. Other examples include depth sensor, altimeter, sides-
can sonar, and forward looking sonar (FLS). Localization by these sensors
usually observe the natural environment as external references and can be
performed in any environment. However these sensors often do not give
full information about vehicle’s location. The most common localization
method of localization with these sensors is dead reckoning (DR). It calcu-
lates the vehicle’s position by integration of velocity over time. Accurate
DR systems tend to be expensive as high-grade sensors are needed. Even
though, any small bias or offset leads to an unbounded increase in error
over time while AUV remains submerged. The second group are sensors
which require additional infrastructure setup. Acoustic positioning sys-
tems measure vehicle’s range and/or angle to the beacons and therefore
provide direct estimates of the position relative to beacons. The beacons
can be fixed to sea bottom, or the surface vehicles, or even other AUVs.
These sensors give good localization reference but often incurs high cost in
deployment and operation.
In a typical localization problem, the state to be estimated usually
consists of the vehicle’s position, depth, orientation (heading, pitch and
roll) and velocity. During a mission, the autonomous vehicle estimates its
own state and at the same time uses the estimated state for further actions.
Usually the depth of an AUV is specified in a mission and measured by the

Chapter 2. Background 12
depth sensor directly. Therefore in this thesis we only focus on the vehicle’s
position in the 2-dimensional space, that is, the northing-easting position.
Let xk be the state vector to be estimated at time step k where xk ∈ Rn,
and let the estimate of xk be xk (In some illustration in this thesis, we also
use yk to denote the estimate of state xk). The general system evolution is
modeled as
xk+1 = f(xk, ak) + ωk (2.1)
where ak is the action that directs vehicle movement for the next step. The
behavior of the system is observed through measurement zk ∈ Rm. The
measurement model is
zk+1 = h(xk+1) + νk+1. (2.2)
The process noise ωk and measurement noise νk are Gaussian white-noise
sequences and are mutually independent. Their error covariances are Qk
and Rk+1 respectively.
Typically the vehicle carries a belief as to where it might be, and main-
tains the localization as a probability distribution over the space of all such
hypotheses. Knowledge of the probability density function (PDF) of the
state conditioned on all available measurement data Z1:k , {z1, z2, ..., zk}

Chapter 2. Background 13
provides the most complete possible description of the state. Given a poste-
riori density function p(xk|Z1:k), estimate xk of the state is obtained from
some performance criteria, for example, maximum a posteriori (MAP).
Bayesian estimation [6] recursively determines the a posteriori density p(xk|Z1:k)
as
p(xk|Z1:k) =p(zk|xk)p(xk|Z1:k−1)
p(zk|Z1:k)
= αp(zk|xk)p(xk|Z1:k−1)
(2.3)
where
1
α, p(zk|Z1:k)
=
∫p(zk|xk)p(xk|Z1:k−1)dxk.
(2.4)
The simplification is based on Markov assumption [4] which states that if
one knows the vehicle location xk, future measurements are independent of
the past ones, that is
p(zk|xk,Z1:k−1) = p(zk|xk). (2.5)
The density p(zk|xk) is the a priori distribution describing the sensor
model. The state transition model is described by the prediction as
p(xk|Z1:k−1) =
∫p(xk|xk−1)p(xk−1|Z1:k−1)dxk−1. (2.6)

Chapter 2. Background 14
When both evolution and measurement models are linear with addi-
tive Gaussian noises, and the a priori distribution is Gaussian, Kalman
filter (KF) [88] can be used to derive the closed-form solution by simply
using the estimated mean x and estimated covariance P for this system.
The parametric description of the distribution is efficient in integrating the
motion and updating the estimates, and also easy to evaluate the local-
ization performance. However it is only suitable for linear systems with
Gaussian noises. Extended Kalman filter (EKF) [45] is the nonlinear ver-
sion of the KF which linearizes the nonlinear evolution and/or nonlinear
measurements. Only unimodal distributions can be modeled by KF and its
extensions. Nonparametric filters use numerical approaches to describe the
PDF and are particularly suitable for nonlinear and non-Gaussian system
estimation since their probability function evolves to better fit the data.
The most well-known nonparametric method is the Particle filter (PF) [7].
2.2 Beacon-Based Localization
In beacon-based localization, beacons are placed in the area where AUVs
navigate. For example, long baseline acoustic positioning system (LBL)
places the transponders on the seafloor, while short baseline system (SBL)
and ultra short baseline system (USBL) have the transponders mounted
on a ship that follows the vehicle. These methods differ in the distances

Chapter 2. Background 15
between the transponders and the distance from each transponder to the
vehicle [90]. The GIB system uses buoys on the surface [2]. When fixed
beacons are used [63], AUVs are limited in their exploration area. The
deployment and setup of the infrastructure are tedious and expensive. Some
systems assist the localization with moving beacons. The moving beacons
can be mounted on vessels [28, 64, 86] or even other AUVs [8, 30, 72].
Surface vessels often encounter danger of collision with other traffic on
the surface. Beacon AUVs are usually assumed to have precise positioning.
Generally the beacon vehicle operates at the surface and has access to GPS,
or is equipped with high-accuracy sensors which enables it to estimate its
own position with minimum errors. A setup, which consists of beacon AUVs
with precise positioning, can form a cooperative team of heterogeneous
AUVs.
2.3 Cooperative Localization
The idea of cooperative localization with beacon AUV is not new. Authors
in [72, 81] presented a single-beacon vehicle providing range-only measure-
ment to support the localization of other AUVs. The supported AUVs are
survey AUVs equipped with sensors for mission purposes. For example,
LEDIF sensor [59] was installed on STARFISH AUVs [49] for chemical
sensing. With these sensing units, survey AUVs are often equipped with

Chapter 2. Background 16
poor navigation sensors. The distance between the survey AUV and the
beacon vehicle is measured to impose a limit on the position drift of the
survey AUV. This approach has been explored by several works which use
observability analysis [5, 76], and position determination algorithms [3, 36].
However, these works pay little attention to the path planning of the beacon
vehicle. For example, [3] assumed a circular path for the beacon vehicle,
[33] used a zigzag path during experiments and [85] adopted a diamond
shaped path.
It is acknowledged that the relative motion between the beacon vehicle
and the survey AUVs is key to having single beacon range-only naviga-
tion perform well. The path of the beacon vehicle should be planned in
such a way that it improves the position estimate of the survey AUVs. In
[25], the path planning of the beacon vehicle aimed at minimizing the ac-
cumulated localization errors in the supported survey AUVs. In [10], the
optimal beacon point targeted at minimizing the position uncertainty of
the survey AUV, but it was determined by brute-force searching approach.
Later [81] proposed the cooperative path planning algorithm using dynamic
programming and Markov decision process formulations.
In the waters of Singapore, heavy maritime traffic makes it dangerous
and inconvenient for AUVs to surface for GPS fix. Consequently, even bea-
con AUVs with high-grade sensors suffer from position drift. We look at
this problem and propose a solution whereby no single AUV functions as

Chapter 2. Background 17
a beacon possessing accurate position information in the team. In terms
localization capability, the team of AUVs is a homogeneous team, whereas
a heterogeneous team includes a beacon AUV with precise position. The
relative position or range between these AUVs can be considered as a rel-
ative geometry constraint in localization. This cooperative localization is
easier to be understood if we treat the group of AUVs as one identity.
The individual AUVs are the multiple “limbs” while the distances between
AUVs are the multiple virtual “joints”. Each limb moves on its own path,
and from time to time, when the distance between two AUVs is measured,
the position estimates of all the AUVs are adjusted accordingly. Cooper-
ative multi-AUV localization has the potential to outperform single-AUV
localization, by taking advantage of data sharing among the team mem-
bers. However, it should be noted that many factors affect the communi-
cation and subsequently the cooperation performance. Water temperature,
salinity, underwater noise, Doppler phase shift, reflection and scattering of
seabed and sea surface are relevant contributing factors to be considered.
Underwater communications have limited bandwidth and are less reliable
compared with terrestrial communication links. Full communication with
every member of the team at any one time of instant is often not practical.
In such a case, decentralization in processing and navigation becomes
necessary. One example of decentralized processing comes from the self-
organized behavior, namely Swarm Intelligence (SI). SI system consists of

Chapter 2. Background 18
a population of simple agents, which interact locally with one another fol-
lowing simple rules. There is no centralized unit or individual who knows
the full details or dictates how each member should behave. Interactions
between agents lead to an ordered or “intelligent” global behavior. The
phenomenon is often referred to as ‘emergence’. The inspiration often
comes from nature, especially biological system behavior like ant colonies,
bird flocking, animal herding and fish schooling. The application of SI to
robotics is called ‘swarm robotics’, a method of coordinating large numbers
of simple robots, which interact with one another to give rise to a desired
collective behavior [58, 60, 61]. In ocean studies, the use of swarm AUVs
for data gathering purposes has emerged as an attractive and alternative
solution to the tedious and manual process of deploying sensor probes, for
example beacons installed on surface vessels. Swarm AUVs are able to
gather more data than the traditional approach, operating at lower overall
cost, and can be deployed to function in harsh environment. It is also ro-
bust to individual failure, compared with the single-AUV system. Swarm
AUVs coordinate their behavior in a distributed way to achieve a particular
goal, such as resource sharing, synchronized motion [74], localization [53],
a specific swarm pattern or coverage [77], etc.
The concept of SI can be visualized in the tutorial about self-propelled
particles (SPP) in [74]. In this tutorial, each particle has its own random-
ness in movement and follows the average heading when it meets other

Chapter 2. Background 19
particles within its vicinity. It introduces order parameters and other crit-
ical values to visualize how the order or phase change with respect to the
variation of randomness, number of particles, vicinity range etc. In SI, the
communication and coordination among members is usually minimal. The
observation on other members also comes with more randomness.
2.4 Dealing with Unknown Correlation
In this thesis, we focus on a small team of AUVs. These AUVs locally
estimate their own positions, and gather observations to update the position
estimates. The distributed processing architecture has many advantages
over centralized architecture. It is reliable in the sense that the loss of any
individual AUV or links does not necessarily prevent the rest of the team
from completing the mission. It is flexible in the sense that AUVs can be
added or deleted from the team by making only local changes.
The most challenge arising from distributed processing in a cooperative
team is the effect of redundant information [39]. To be specific, the infor-
mation from different vehicles cannot be combined straightforward unless
they are independent or have a known degree of correlation. Many years
ago authors in [13] recognized that local estimates have correlated errors.
If between local estimates the correlation is naıvely assumed to be zero,
estimation overconfidence comes with the fused estimate, and may lead

Chapter 2. Background 20
to filter divergence [42]. Therefore dealing with unknown correlation in
the cooperative localization becomes important. With smaller number of
AUVs in a group, common information flowing around the team is more
influential. This is because the common information easily cycles with less
independent information input from other AUVs.
A simple parametric localization filter like Kalman filter [46] and its
extensions [38, 45, 46] gives estimated position x and the corresponding
estimated error covariance P. At each time step, a vehicle predicts its own
position and updates the estimate if local measurement is available. They
keep their local estimate x(·),P(·) where (·) denotes the vehicle’s identity.
There is a time when two vehicles (Vehicle i and Vehicle j) in the group
communicate, exchange their information (for example, the estimated po-
sition and estimated error covariance, x(i),P(i) and x(j),P(j)), and update
their respective position estimates. The other members in the group may
not know this cooperation due to the loss of transmission packets. There-
fore, to those members, the correlation between information provided by
vehicles i and j is unknown. This is essentially a data fusion problem deal-
ing with unknown correlation in distributed network. The estimation can
be visualized as an estimation network where the nodes are the vehicles
and the edges connecting the nodes denote the information flow within the
network.

Chapter 2. Background 21
For one-step cooperation, we drop the time step k for simplicity. As-
suming both estimates are consistent, that is that E[(x(i) − x(i))(x(i) −
x(i))>] � P(i) and E[(x(j) − x(j))(x(j) − x(j))>] � P(j), the fused estimate
(x(f),P(f)) at Vehicle i should satisfy the following fusion principles [67, 84]:
1. Performance improvement: P(f) � P(i),
2. Estimation consistency: E[(x(f) − x(i))(x(f) − x(i))>] � P(f).
An optimal fusion is derived in [23] if correlation is known. To fuse esti-
mates with unknown correlation, [43] proposed a Covariance Intersection
(CI) method, which essentially provides an upper bound on the error covari-
ance of the fused estimate. It leads to various approaches for determining
the weight w [24, 40]. Although the estimation consistency is maintained,
the estimated error covariance is no smaller than the individual error co-
variance at any direction. The expression of the fused estimate is derived
by assuming independent errors between x(i) − x(i) and x(j) − x(j), which
is contradictory to the problem formulation. Reference [75] proposed El-
lipsoid Intersection (EI), which essentially picks the estimate with smaller
error covariance. It fulfills the first fusion principle but the consistency
is not proved. Along the same line as CI, the author in [52] and his re-
lated work proposed Split Covariance Intersection (SCI), which uses split
form to represent the dependent and independent parts in the estimate.
However, in the state update with relative position estimates and states of

Chapter 2. Background 22
other vehicles, only the relative measurement is separated as independent
information.
Instead of overestimating the intersection region, authors in [15] pro-
posed a largest ellipsoid algorithm which leads to a tighter estimate but
the fused estimate is slightly underestimated. In place of CI, [67] proposed
Bounded Covariance Inflation (BCInf), a mechanism for creating conser-
vative covariance matrices for which the bounds on the cross correlations
are known. The key is the book keeping messages (the coupling scalar) to
interpret the correlated part and uncorrelated part. The decentralization
was demonstrated by using only two-vehicle SLAM.
2.5 Bathymetry-Aided Navigation
Bathymetry is the submerged equivalent of an above-water topographic
map. It is obtained by prior survey and recorded in a geographical map.
Bathymetry-based localization and navigation, is also known as terrain
relative navigation (TRN) [55], terrain based navigation (TBN) [22, 56],
terrain-aided navigation (TAN) [22], and bathymetry-aided navigation (BAN)
[47]. The key idea is to match the local bathymetry as seen by an under-
water vehicle against the reference map, and estimate the location of the
vehicle on that map. Bathymetric SLAM is a well-recognized concept of
navigation and map building [14, 18] using a multibeam sonar in high-end

Chapter 2. Background 23
AUVs. Multibeam sonar measures the bathymetry in a small patch of area.
The measured information is rich as it consists of multiple measurements in
a geographical formation. In terms of localization, rich bathymetry infor-
mation from multibeam sonar gives high localization accuracy. However,
multibeam sonar is costly and take up space in AUVs. As we focus on
small-sized and low-cost AUVs, bathymetry measurements can be simply
managed with a single echo-sounder [73] or altimeter. Observations from
the depth sensor and altimeter lead to the observed bathymetry where the
vehicle is located. Although the bathymetry is a single-point measurement,
works in [47, 80] have showed the feasibility. It is fused with the odomet-
ric estimation to get the best possible update about the vehicle position.
Therefore bathymetry map indicating the water depth offers an attractive
tool to reduce the localization error of the submerged AUVs, without ad-
ditional cost on hardware or external infrastructure.
In [47], the authors showed a strong correlation between localization
accuracy and variation of bottom topography. The conclusion was that a
reasonable localization could be made with a single beam altimeter, as long
as sufficient bathymetric variation was available along the AUV path. In
[35], bathymetry variation was characterized by the depth gradient and a
path was generated to avoid regions where the terrain has small variations.
In [37], salient points (locations with more bathymetry variations) are vis-
ited when the localization uncertainty surpasses a user-provided threshold.

Chapter 2. Background 24
Various terrain statistic information was listed in [62], including standard
deviation, roughness, correlation coefficient and entropy. However the au-
thors did not demonstrate these terrain information metrics and the set-
points (planned points along the path) were manually selected. The relation
between the bathymetry information and localization performance has not
been systematically studied. This relation first requires a quantification of
localization uncertainty, which is important in relating localization perfor-
mance to the bathymetry information. Generally, the undulating topology
of the underwater terrain yields non-Gaussian or multi-modal distributions
in localization. Traditional parametric filters such as Kalman filter are not
suitable in describing such distributions or quantifying the localization per-
formance. Secondly, the bathymetry information need to be defined prop-
erly. Information entropy map turns out to be a suitable idea matching the
localization uncertainty and bathymetry information. The idea of entropy-
based map has been used as an efficient method of portraying terrain data
[32]. Author in [89] also provided an information theory framework for the
analysis of spatial uncertainties. Particle filter based entropy was derived in
[17] to characterize the uncertainty of a running particle filter. Up to what
we know, no one has used the information theoretic measure to evaluate
the navigation with bathymetric aids.

Chapter 3
Distributed Localization in a
Cooperative Team
3.1 Problem Statement
In presence of limited bandwidth and lossy channels, the information com-
municated between vehicles may not be raw information; cooperation in
a team may not be acknowledged by all the members as well. We show
that the cooperation under constrained communication still helps improve
individual performance. However the cooperation may yield worse local-
ization than single-vehicle operation without cooperation. This is mainly
due to the lossy channel which makes vehicles treat correlated information
as independent. We illustrate these problems with simple examples and
25

Chapter 3. Distributed Localization in a Cooperative Team 26
propose a decentralized localization algorithm. This algorithm is able to
handle unknown correlation, requires small transmission packets and pro-
vides consistent position estimates when fusing correlated data.
The work in this chapter was published in [69].
3.2 Decentralized Cooperation with Limited
Communication
Many natural behaviors have shown that simple interactions among a pop-
ulation of simple agents improve the overall performance with decentralized
processing. Examples are birds flocking, ant colonies, animal herding, bac-
terial growth, fish schooling, etc. The collective behavior of decentralized,
self-organized systems is called Swarm Intelligence (SI). We show the im-
provement through simulations of the two common SI behaviors. Next we
simulate a small team of AUVs, cooperating at various loss rate of the
communication packets. We highlight the problems and challenges of the
distributed localization with underwater communication constraints.
3.2.1 Self-Propelled Particles (SPP) and Swarm AUVs
Self-propelled particles (SPP) is a swarm modelled by a collection of parti-
cles that move with a constant speed but respond to a random perturbation

Chapter 3. Distributed Localization in a Cooperative Team 27
[29]. The simple interactions with each other lead to the emergence of col-
lective behavior. Two examples of SPP models - group heading alignment
and aggregation, are applied to a simulation with 7 AUVs. We show that at
various loss rate of the communication, the AUV swarm still outperforms
the individual.
3.2.1.1 Group Heading Alignment
The group of AUVs are simulated with random noises added to the vehicle
heading direction and heading speed. Each vehicle shares its heading quasi-
periodically, that is, periodically with some noises. Other vehicles have
a probability to hear the broadcast and turn to the angle bisector with
the broadcaster’s heading. Vehicles are deployed randomly in an area of
1000× 1000 meters squared with random initial headings.
The standard deviation of all AUV headings indicates the alignment
of the group. We plot the alignment with different the update interval
δT at a loss rate 50%. In Figure 3.1(a), the update interval δT varies 1
minute apart from 30 seconds to 4 and half minutes, with a varying noise
N (0, 22) in seconds. It can be seen that the standard deviation of vehicle
headings is smallest for δT = 30 seconds. With shorter update interval,
the heading information spreads faster and the group headings get aligned
within 3 minutes. In the other hand, longer update interval gives slower

Chapter 3. Distributed Localization in a Cooperative Team 28
(a) At 50% packet loss: Smaller update interval yields faster convergence and smallervariation in group heading.
(b) With update interval δT = 30 seconds: Smaller packet loss yield better groupheading alignment.
Figure 3.1: Smaller update interval and less packet loss lead to bettergroup heading alignment.

Chapter 3. Distributed Localization in a Cooperative Team 29
heading alignment. Update intervals of 210 seconds and 270 seconds show
little convergence in vehicle headings. The standard deviation is near π2
radius, which means vehicles are heading in almost all directions.
Figure 3.1(b) shows the group heading alignment at update interval
δT = 30 seconds, with different loss rate. With higher loss rate, the group
headings align to a lesser degree.
The group heading alignment can be used to lead the group heading
with one vehicle sticking to its planned heading. Similar application is
the group search and tracking, where team members follow the heading
combined between target-driven and group-coherent rules.
3.2.1.2 AUV Aggregation
Another commonly seen swarm intelligence is the aggregation, where enti-
ties, particularly animals, of similar size which aggregate together, perhaps
milling about the same spot or moving or migrating in some direction. We
model this aggregation using AUVs. In the aggregation, at each time, one
vehicle broadcasts its own position estimates. Other vehicles that success-
fully pick up the broadcast will head towards the broadcaster, or the center
of the broadcasting vehicles if they received two broadcasts within 1 second.
An aggregation circle is drawn to cover all the vehicle locations. We use
the maximum pairwise distance to evaluate the group coverage. Vehicles

Chapter 3. Distributed Localization in a Cooperative Team 30
are initialized to head straight away from each other. They only update
their headings if they receive the broadcasted position from other team
members. We show that AUVs aggregation performance highly depends
on the communication rate.
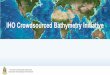
Figure 3.2 shows that if the communication breaks down totally (pL =
1), vehicles move further and further from each other and group cover-
age increases linearly. When the communication has less packet loss, the
group coverage converges faster, to a minimum coverage. Group coverage
converges to around 100 meters with loss rate 0 and 0.2.
Figure 3.2: AUV aggregation at update interval δT = 30 seconds:smaller packet loss results in faster convergence of the group coverage.

Chapter 3. Distributed Localization in a Cooperative Team 31
3.2.2 Small Team of AUVs
We look at 3 AUVs cooperating through acoustic ranging. 3 AUVs is
considered the smallest number. The reason is that 2-AUV group has
common information directly returned; it is not complete to understand the
information flow and the effect of unknown correlation in a third member
with a 2-AUV group.
The distance between vehicles is calculated based on the time-of-flight
of the acoustic signals. Compared with swarm AUVs, the cooperative net-
work is smaller and the cooperation is specified to localization with aids of
acoustic ranging.
From time step k to the next time step k + 1, vehicle’s position x
propagates in a way such that
x(i)k+1 = F(i)x
(i)k + B
(i)k uik + ω(i) (3.1)
where i is the vehicle number and w(i) is propagation additive noise. The
propagation noises are independent zero-mean Gaussian processes with co-
variances Q(i). B(i) and u(i) are the control matrix and control input.
When AUVs send acoustic signals for ranging, they also encapsulate
the information in the acoustic signals during the exchange. With a non-
linear range measurement, Extended Kalman filter (EKF) [45] is firstly

Chapter 3. Distributed Localization in a Cooperative Team 32
formulated for the centralized system with 3 vehicles (Vehicle i, j and
m). The centralized system assumes all the local propagation, local mea-
surements and relative measurement are known to a central unit. Then
a simple decentralization is used to show the problem of communication
issues. A decentralized system is closer to the realistic: each vehicle only
knows what happens locally; the local propagation, local measurement, and
relative measurement when it happens to this vehicle. Therefore, the filter
has to be designed as to what are kept locally and what are communicated.
We discuss the possibility and simulate scenarios using the decentralized
EKF.
The centralized EKF predicts the positions of 3 vehicles as
xk+1|k = Fkxk|k + Bkukx(i)
x(j)
x(m)
k+1|k
=
F(i) 0 0
0 F(j) 0
0 0 F(m)
k
x(i)
x(j)
x(k)
k|k
+
B(i) 0 0
0 B(j) 0
0 0 B(m)
k
u(i)
u(j)
u(k)
k|k
(3.2)
where 0 is zero matrix in proper size. The centralized control input u and
control matrix B are formulated in the same way as the centralized state
vector x and propagation matrix F. The propagation of ith AUV error
covariance is
P(i)k+1|k = F
(i)k P
(i)k|kF
(i)>k + Q
(i)k (3.3)

Chapter 3. Distributed Localization in a Cooperative Team 33
while the error propagation of the cross-correlation term between AUV i
and j is
P(ij)k+1|k = F
(i)k P
(ij)k|k F
(j)k
>. (3.4)
If the propagation model of every AUV is known to all, each AUV can
keep its respective row of the centralized covariance matrix and make full
propagation for the cross-correlation term. However this only applies for
missions with predefined control input. In [68], authors split the cross-
correlation term such that
P(ij)k+1|k =
√P
(ij)k+1|k
√P
(ji)k+1|k
>
= F(i)k
√P
(ij)k|k (F
(j)k
√P
(ji)k|k )>.
(3.5)
According to [68], when AUV i and AUV j meet, they exchange their
distributed cross-correlation terms and get the full picture by multiplying
them. Therefore vehicles do not need communicate about their respective
propagation model. However the local measurement should update the
correlation as well as the correlated terms of other members. Meanwhile,
due to the communication packet loss, for example, AUV i may not know
the information exchange happening between Vehicle j and Vehicle m.

Chapter 3. Distributed Localization in a Cooperative Team 34
The range measured between AUV i and m at time step k + 1 is rk+1
and is observed as
rk+1 = h(xk+1) + vk+1
= ‖x(i)k+1 − x
(m)k+1‖+ υk+1
(3.6)
where ‖ • ‖ is a norm operation and vk+1 ∼ N (0,Rr,k+1) is the ranging
measurement error. Rr is the error covariance. The observation matrix for
range between AUV i and m is the Jacobian
Hk+1 =∂h
∂x
∣∣∣∣xk+1|k
=
[H(im) 01×2 −H(im)
]k+1|k
(3.7)
where position state is in size 2× 1 and H(im) = (x(i)−x(m))>
‖x(i)−x(m)‖ . The residual
covariance matrix is
Sk+1 = Hk+1Pk+1|kHTk+1 + Rr,k+1
= [H(im)k+1 (P
(i)k+1|k −P
(mi)k+1|k −P
(im)k+1|k + P
(m)k+1|k)H
(im)k+1
>] + R
(im)r,k+1.
(3.8)
We can see that the observation matrix and the residual covariance matrix
are derived solely from the information related to the two vehicles. The

Chapter 3. Distributed Localization in a Cooperative Team 35
Kalman gain is
Kk+1 = Pk+1|kH>k+1S
−1k+1
K(i)
K(j)
K(m)
k+1
=
(P
(i)k+1|k −P
(im)k+1|k)Hk+1
>
(P(ji)k+1|k −P
(jm)k+1|k)Hk+1
>
(P(mi)k+1|k −P
(m)k+1|k)Hk+1
>
Sk+1−1.
(3.9)
The state estimate is updated as
xk+1|k+1 = xk+1|k + Kk+1yk+1
=
x(i)
x(j)
x(m)
k+1|k
+
K(i)
K(j)
K(m)
k+1
(rk+1 − ‖x(i)k+1 − x
(m)k+1‖).
(3.10)
We can see that the Kalman gain for each AUV is proportional to the dif-
ference between the cross-correlations with the exchanging pair. If vehicle
j picks up the ranging and communicated information from the exchanging
pairs, it can also update locally.

Chapter 3. Distributed Localization in a Cooperative Team 36
The covariance update is
Pk+1|k+1
=(I−Kk+1Hk+1)Pk+1|k
=Pk+1|k −∆Pk+1
∆Pk+1
=Kk+1Hk+1Pk+1|k
=
K(i)Hk+1(P(i) −P(mi)) K(i)Hk+1(P(ij) −P(mj)) K(i)Hk+1(P(im) −P(m))
K(j)Hk+1(P(i) −P(mi)) K(j)Hk+1(P(ij) −P(mj)) K(j)Hk+1(P(im) −P(m))
K(m)Hk+1(P(i) −P(mi)) K(m)Hk+1(P(ij) −P(mj)) K(m)Hk+1(P(im) −P(m))
.
(3.11)
With a ranging between Vehicle i and Vehicle m, the terms highlighted
in red and blue are the updates on the cross-correlations with AUV j.
If vehicles keep each row locally, the cross-correlation terms need to be
updated together such that they are the same (in transpose) as the one kept
at the counterpart. If all the exchanged information is not acknowledged
by AUV j and yet the exchanging AUVs still update their correlation with
AUV j, the terms highlighted in red and blue are not same (in transpose).
There are two options when exchanging packet is lost to AUV j:
• Total ignorance: AUV j does not pick up the communications be-
tween AUV i and j and has no idea about this cooperation afterwards.

Chapter 3. Distributed Localization in a Cooperative Team 37
The packet gets lost completely.
• Delay and relay: The communications between AUV i and m at time
k + 1 is logged by the exchanging AUVs and other AUVs (if there
are more vehicles which pick up the cooperation). It will be used
to update AUV j later when they meet. It is an ‘Out Of Sequence
Measurement’ (OOSM) problem.
Three filters are tested in the simulation of cooperative localization.
They are:
• DR - Dead reckoning without any ranging and cooperation among
the AUVs.
• CEKF - the centralized EKF with ranging. It tracks the full er-
ror covariance matrix of the team, gives the optimal estimation and
therefore serves as a baseline for comparison.
• DEKF - the decentralized EKF with some packet loss rate to other
AUVs. Each vehicle keeps its respective row in the CEKF. The cen-
tralized filter is represented as
Pk+1 =
P
(i)row,k+1
P(j)row,k+1
P(m)row,k+1
. (3.12)

Chapter 3. Distributed Localization in a Cooperative Team 38
In the simulation, for each AUV, the heading direction and heading
speed (between 0.5 and 2 m/s) are randomly generated, with a low proba-
bility (1.4%) to change to a new direction and speed at each time step. The
propagation noise comes from the zero-mean Gaussian noise of the velocity
with 0.1 m/s standard deviation for all AUVs. At every 10 seconds, a pair
of AUVs exchange their information for ranging. No local measurement is
made.
3.2.2.1 Distributed EKF with Packet Loss
The advantage of cooperative localization using ranging over the group
of AUVs is shown by CEKF in Figure 3.3. When DR has drifting error,
the aid received from ranging information during the first 100 seconds is
significant. After 100 seconds, ranging still helps by making the overall
drifting slower.
When the loss rate pL = 0 (Figure 3.3(a)), DEKF has the same per-
formance as CEKF. When the loss rate increases to 40% (Figure 3.3(b)),
we see that the average error by DEKF is larger than the average error
given by CEKF. When pL goes up to 50% (Figure 3.3(c)), there is a jump
in estimation error observed. When pL is even larger (Figure 3.3(d) and
Figure 3.3(e)), the positioning error grows rapidly and the performance is
much worse than DR. This result agree with the statement in [42]: when

Chapter 3. Distributed Localization in a Cooperative Team 39
(a) pL = 0
(b) pL = 0.4 (c) pL = 0.5
(d) pL = 0.55 (e) pL = 0.75
Figure 3.3: Average Error in Distance of 3 AUVs with various lossrate pL: When packet loss is less, DKF improves localization throughcooperation. When packet loss is higher, DKF improves localization at
first but later deteriorates fast.

Chapter 3. Distributed Localization in a Cooperative Team 40
the correlation is ignored, estimation overconfidence arises with the fused
estimate, and may lead to filter divergence.
3.2.2.2 Delay and Relay with a Simplified Model
Equations (3.10) and (3.11) show that the update of the estimate and er-
ror covariance are additive. If AUV j misses the update from the ranging
between AUV i and m at time step k+1, it will continue predicting its esti-
mate without the additive terms. If the propagation matrix F is an identity
matrix, the error covariance matrix propagates with additive process noise
Q only; the correction term for the missing update can be simply added
to the current state estimate. If the propagation matrix is not an identity
matrix, the propagation in the delayed duration has to be re-calculated
to obtain the current state (this is called retrodiction or backward predic-
tion). This becomes especially hard for nonlinear propagation model as the
inverse model depends on all the past status.
We test on a simplified model with the following assumptions:
Assumption 1. The propagation model of every AUV has identity matrix
F and is known to all.
Assumption 2. Ranging is the only available measurement.

Chapter 3. Distributed Localization in a Cooperative Team 41
Let each AUV keep the details of a limited number Np of the past
updates (let Np = 5 for example). The procedures and required information
are as follows:
1. Check : When 2 AUVs communicate for ranging update, they com-
pare and check the logs of the counterpart for the past Np exchanges.
2. Delayed measurement : If any missing logs in the past are found,
the current state estimate xrow and error estimate Prow are updated
with the delayed measurement(s).
3. Ranging : The two AUVs then exchange information for ranging,
and log the current update. At the same time, the other AUVs who
successfully pick up the ranging update will also get updated and log
the update.
The information exchange and update is kept at the communicating
AUV i and m and other AUVs if they successfully pick up the communi-
cation. They are:
• Ranging time ke.
• Exchangers’ identity (for example, AUV i and m).
• Exchangers’ position estimates x(i)ke
and x(m)ke
.
• The row of exchangers’ error covariance P(i)row,ke
and P(m)row,ke
.

Chapter 3. Distributed Localization in a Cooperative Team 42
• The acoustic ranging rke .
• The error covariance Rr,ke of the acoustic ranging.
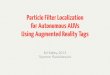
We simulate 4 AUVs with vehicle ID as 1, 2, 3 and 4. We schedule the
communication of the AUV pairs in Table 3.1. Figure 3.4 shows a special
case where only AUV 4 has a loss rate L4 = 1. This means AUV 4 gets the
delayed ranging update of other pairs of AUVs only when it communicates
with others for ranging. The DEKF of AUV 1 to 3 are the same as CEKF
and is not shown here. We are only showing the RMSE of AUV 4 over 1000
runs. It can be seen that the estimation of AUV 4 gets corrected after 30
seconds once it reconnects with the other AUVs.
Table 3.1: Pairing Sequence for Ranging Update
Time Pair(δT = 10 seconds) i j
10 1 220 2 330 3 440 4 150 1 260 2 3...
......
Figure 3.5 shows the result when all AUVs have loss rate pL = 0.4. It
can be seen that the logs of past Np = 5 rangings are able to correct the
DEKF and give an estimate which is very close to the one given by CEKF.

Chapter 3. Distributed Localization in a Cooperative Team 43
(a) RMSE of AUV 4 with pL = 1
(b) Zoom-in: RMSE of AUV 4 with pL = 1
Figure 3.4: Estimation error of AUV 4 gets corrected once it recon-nects with the other AUVs after 30 seconds.

Chapter 3. Distributed Localization in a Cooperative Team 44
(a) RMSE of 4 AUVs with pL = 0.4
(b) Zoom-in: RMSE of 4 AUVs with pL = 0.4
Figure 3.5: Logs of past Np = 5 rangings are able correct the DEKFand give similar result to CEKF.

Chapter 3. Distributed Localization in a Cooperative Team 45
In fact, the pairing sequence is critical in the delay and relay. As long
as Np ≥ N − 2 where N is the number of AUVs in the team, the controlled
pairing sequence can guarantee the circulation of the information among
the team over a cycle.
Compared to terrestrial communication, underwater communication
uses acoustic waves instead of electromagnetic waves. It has problems
such as multi-path propagation, time variations of the channel, small avail-
able bandwidth and strong signal attenuation especially over long ranges.
Therefore the communication has low data rates. In such a case, successful
ranging has irregular time interval and random pairing sequence. It is pos-
sible that AUVs miss the past ranging update without any relay. It is also
possible that an AUV gets ‘out of sequence measurement’ (OOSM). The
whole communication scheme (time and sequence) becomes complicated
and unpredictable.
Meanwhile, only the pre-planned missions are known to each vehicle.
The actual paths and activities change with respect to the situation and
may not be updated to every other member. Vehicles can also make local
measurement to update their position estimates. All these possibilities
make the correlation untrackable in the distributed processing .

Chapter 3. Distributed Localization in a Cooperative Team 46
3.3 Information Loss in Distributed Process-
ing
In the previous section, each member keeps a row of the centralized state
vector and error covariance. Vehicles may still lose track of the exact cor-
relation with each other. In this section, each vehicle only keeps estimates
about itself and we assume the inter-vehicle correlation is known exactly.
Examples show that compared with centralized processing, the distributed
processing has some information loss even when the correlation is tracked
precisely.
The simplest example consists of two vehicles estimating their locations
in 1-dimensional space. Their initial correlation coefficient ranges from
[0 : 0.1 : 0.9]. Both vehicles follow the 3 steps: 1) propagate with noise, 2)
make local measurements about their positions, and 3) communicate their
positions along with range measurements. Figure 3.6 shows the centralized
Kalman filter (CKF) and decentralized Kalman filter (DKF) estimation
architectures. The positions of Vehicle 1 and 2 are considered as random
variables as they evolve at each succeeding moments with random process
noise. Each vehicle makes a local measurement, followed by a relative

Chapter 3. Distributed Localization in a Cooperative Team 47
(a) Central processing (CKF)
(b) Decentralized processing (DKF)
Figure 3.6: Central processing architecture vs. distributed processingarchitecture. CKF fuses the raw measurements directly while DKF fuses
the local processed data.
measurement
z(1) = x(1) + ν(1),
z(2) = x(2) + ν(2),
r = h(x(1),x(2)) + υ.
(3.13)

Chapter 3. Distributed Localization in a Cooperative Team 48
A central estimation (Figure 3.6(a) uses the aggregated state and ag-
gregated measurements. The centralized error covariance is
PCKF = (
P(1) P12
P>12 P(2)
−1
+ H>CKF
R(1) 0 0
0 R(2) 0
0 0 Rr
−1
HCKF)−1
(3.14)
where HCKF = ∂z∂x
. DKF (Figure 3.6(b)) only sends over the processed
estimate and error covariance after local updates. We assume the initial
correlation is exactly known. Therefore, both filters trace the correlation
and therefore estimation are strictly consistent. Figure 3.7 shows the esti-
mated error covariance after the two processing architectures in Figure 3.6.
The initial error covariances are P(1) = 4,P(2) = 4 respectively. The rela-
tive measurement has an error covariance R = 1. We can see that DKF has
larger error covariance except when the initial correlation coefficient is 0.
With a larger initial correlation, the processing of the local measurements
before fusion results in a larger gap in the estimation error compared with
CKF.
We use information entropy to explain the performance of DKF. En-
tropy refers to the uncertainty associated with a probability distribution,
and is a measure of the descriptive complexity of a PDF. Mathematically

Chapter 3. Distributed Localization in a Cooperative Team 49
(a) R(1) = R(2) = 10,Q = 1 (b) R(1) = R(2) = 1,Q = 1
(c) R(1) = R(2) = 25,Q = 1 (d) R(1) = R(2) = 10,Q = 10
Figure 3.7: Estimation error squared versus initial correlation coeffi-cient. DKF has larger error covariance than CKF except when initial
correlation coefficient is 0.
it is expressed as
h{F (x)} , E{− ln p(x)} (3.15)
where x is a random variable. With the measurement z, the entropy of the
conditional probability is
E{− ln[p(x|z)]} = E{− ln[p(x)]} − E{ln[p(z|x)
p(z)]}
h(x|z) = h(x)− I(z; x).
(3.16)

Chapter 3. Distributed Localization in a Cooperative Team 50
It states that the entropy following an observation is reduced by an amount
equal to the information inherent in the observation [1].
CKF gives
hCKF = h(x|z)
= h(x)− I(z; x)
= [h(x(1)) + h(x(2))− I(x(1); x(2))]− [I(z(1); x(1)) + I(z(2); x(2)) + I(r; x)].
(3.17)
DKF gives
hDKF = h(x(1),x(2)|z(1), z(2))− I(r; x(1),x(2))
= [h(x(1)|z(1), z(2)) + h(x(2)|z(1), z(2))− I((x(1); x(2)|z(1), z(2)))]− I(r; x)
= [h(x(1)|z(1)) + h(x(2)|z(2))− I((x(1); x(2)|z(1), z(2)))]− I(r; x)
= [h(x(1))− I(z(1); x(1))] + [h(x(2))− I(z(2); x(2))]− I((x(1); x(2)|z(1), z(2)))− I(r; x).
(3.18)
The difference between these two expressions is I(x(1); x(2)) ≥ I(x(1); x(2)|z(1), z(2)),
and makes hCKF ≤ hDKF. The equality happens only when I(x(1); x(2)) = 0.
The mutual information between the states is reduced by conditioning on
local measurements. There is information loss in only transmitting the
processed up-to-date estimates, instead of raw sensor data.

Chapter 3. Distributed Localization in a Cooperative Team 51
In another way, we elaborate this in the context of multivariate distri-
bution. Assuming the cross-correlation can be tracked, the mutual infor-
mation I(x(1); x(2)) is expressed as
I(x(1); x(2)) = −1
2ln |Σρ| (3.19)
where Σρ is the correlation matrix constructed from the covariance matrix
P =
P(1) P(12)
P(12)> P(2)
. The entries of the correlation matrix records the
Pearson product-moment correlation coefficients between the random vari-
ables. In 1-dimensional space, I(x(1); x(2)) = −12
ln(1 − ρ2) where ρ is the
correlation coefficient. After local measurement update, the new central
error covariance is given as
P = (
P(1) ρ√
P(1)P(2)
ρ√
P(1)P(2) P(2)
−1
+
R(1) 0
0 R(2)
−1
)−1. (3.20)
The new correlation coefficient for P is
ρ =ρ√
(1 + P(2)
R(2) (1− ρ2))(1 + P(1)
R(1) (1− ρ2))
≤ ρ.
(3.21)

Chapter 3. Distributed Localization in a Cooperative Team 52
Therefore we have
I(x(1); x(2)|z(1), z(2)) ≤ I(x(1); x(2))
hCKF ≤ hDKF.
(3.22)
It means CKF ends with less uncertainty in the state [x(1)>,x(2)>]>, or
equivalently smaller estimation error. We can understand this problem as
information loss in pre-processing of the raw data. If we want DKF to
achieve CKF performance, we need to transmit all the past local propaga-
tion and measurement data.
3.4 Distributed Extended Information Fil-
ter
In Section 2.4, we have defined the fusion principles. It means that informa-
tion fusion through cooperation must improve the individual performance
and consistent estimation is preferred. Existing method either ignores the
correlation from different sources or overestimate the correlation. The for-
mer is called naıve filter. The later such as covariance intersection method
[44] and its related [52, 67], ellipsoid intersection method [75] and largest
ellipsoid algorithm [15] assume maximum correlation when dealing with
information from unknown sources.

Chapter 3. Distributed Localization in a Cooperative Team 53
We use extended information filter (EIF) - an inverse covariance form of
the Kalman filter, to separate the independent part of the local information.
The reason is that the local prediction and measurement information can
be encapsulated into a single message and acoustically transmitted with
bounded size. The decentralized EIF was first implemented in a single-
beacon cooperative localization in [31] where the server (an surface vehi-
cle) sends the encapsulated information while performing ranging with the
client (underwater vehicle). It can handle asynchronous broadcasts from
the server but the information flows in one direction only, that is, from
server to clients. To accommodate more AUVs operating over very large
operational areas without surface beacons, we propose a new cooperative
multi-AUV localization algorithm using distributed EIF (DEIF). We de-
scribe the detailed design and implementation for a team of cooperative
AUVs, where no single AUV functions as a beacon possessing accurate
position information. The proposed method is designed to record the cor-
related information from the most recent cooperation, providing consistent
position estimates in event of packet loss.
3.4.1 Illustrative Examples
In this section, we use some simple examples to illustrate the problems with
traditional approaches and show how our proposed DEIF overcomes these
problems.

Chapter 3. Distributed Localization in a Cooperative Team 54
3.4.1.1 Limited Bandwidth
The estimation result of EIF for the 3-step problem (Figure 3.6) is shown
in Figure 3.8.
Figure 3.8: Traditional distributed processing (DKF) performs poorlyas compared to centralized processing (CKF), but our proposed dis-
tributed method (DEIF) is able to perform well.
As discussed, there is information loss in the traditional DKF even
if the correlation is precisely known. To maintain the same performance
as the centralized estimation, traditional DKF requires a full storage and
transmission of the historical information. If there are n steps of local
propagation and measurements before the cooperation, the packet size for
transmission will increase as O(n). Our proposed method using DEIF is
able to avoid the information loss that DKF suffers, and perform as well as
the CKF using transmissions of fixed, small-sized packets.

Chapter 3. Distributed Localization in a Cooperative Team 55
Figure 3.9: Estimation error of AUV 1 using various filters in a 3-AUVcooperative localization example. DEIF is close to CKF.
3.4.1.2 Inter-Vehicle Correlation
We demonstrate the danger of ignoring the correlation in a 3-AUV coop-
erative localization. Let AUVs broadcast their state estimates in a round-
robin fashion. The estimation error of AUV 1 is shown in Figure 3.9. At
10 seconds, all AUVs submerge and lose GPS position measurements, but
continue to communicate with each other. At 90 seconds, AUV 2 obtains a
high-quality position measurement (say, by surfacing and obtaining a GPS
fix). AUV 1’s localization is improved by fusing estimates from AUV 2. A
naıve Kalman filter (NKF) simply ignores the correlation among vehicles;
it assumes an improvement in estimate by fusing data from ‘independent’
sources, while in fact there is no improvement from double counting the
shared information. The estimated error covariance of NKF appears to be

Chapter 3. Distributed Localization in a Cooperative Team 56
very low, but the actual estimation error diverges quickly. Its performance
can be even worse than single vehicle localization (SKF). Our proposed
method (DEIF) performs well, and produces results that are quite close to
the ideal (but impossible) CKF.
3.4.2 Formulation and Design
The vehicle propagation and measurement models follow Equation (2.1)
and Equation (2.2).
In the multi-vehicle cooperation, a vehicle encodes its information into
acoustic packets and broadcasts as a Peer Vehicle (PV). Other vehicles in
the team receive the packets as Receiving Vehicles (RVs). When the team
is synchronized, the one-way travel time of the acoustic signals is simply
the difference between the time-of-launch and time-of-arrival. The distance
from the PV with position xP to an RV with position xR is obtained, given
the propagation speed of underwater signals. The observation model is
rk = ||xk,R − xk,P||+ υk (3.23)
where the operator ||·|| denotes the Euclidean norm, and υk is the zero-mean
Gaussian noise with covariance Rk. To minimize the effect of nonlinearity,
we assume the vehicles are far away from each other so that the error in
position estimation can be modeled as a 2-dimensional zero-mean Gaussian

Chapter 3. Distributed Localization in a Cooperative Team 57
random variable, after the relative measurement update. We assume all the
noises are independent Gaussian noise.
The Gaussian-distributed position state vector x with error covariance
P has the associated information matrix and information vector in an EIF
as
Λ = P−1
η = Λx.
(3.24)
At time step k, each vehicle keeps an information set (xk,Pk,Λp, ηp). xk
is the combined 3-state vector xk = [x>k , x>t , x
>c ]> = [x>k ,x
>p ]> where xp =
[x>t , x>c ]>. xk is the current position state. t denotes the time step when
the most recent cooperation is made. During this cooperation, if a broad-
cast from a PV with position state xc is received, this vehicle’s position
is updated as xt. If this vehicle broadcasts as a PV, xc is dummy and xt
is considered fully correlated with the team. (Λp, ηp) is the corresponding
information pair (information matrix and vector) of xp by Equation (3.24).
3.4.2.1 Initialization
At time step k = 0, the initial position x0 is assigned to xt. We assume
that all vehicles are deployed independently, the initial position has no
correlation with the team and xc is dummy.

Chapter 3. Distributed Localization in a Cooperative Team 58
3.4.2.2 Local Prediction
Let (Λk, ηk) be the information pair for xk = [x>k ,x>p ]>, and xk+1 be the pre-
dicted state from xk according to the propagation model. We augment the
state vector with the predicted state and we have xk+1 = [x>k+1, x>k ,x
>p ]>.
The augmented state vector has an associated information pair given by
Λk+1 =
Q−1k −Q−1
k Fk 0
−F>k Q−1k F>k Q−1
k Fk 0
0 0 0
+
0 0 0
0
0
Λk
ηk+1 =
Q−1k (f(xk, ak)− Fkxk)
−F>k Q−1k (f(xk, ak)− Fkxk)
0
+
0
ηk
.
We can see that in an EIF, the prediction information is contained in the
first term of the addition, with zeros padded accordingly. Meanwhile, we
only see non-zero entries in the off-diagonal blocks between states at con-
secutive time steps. This agrees with Markov process assumption stating
that prediction for the future state solely depends on the most recent state.
The 3-state vector xk+1 = [x>k+1, x>t , x
>c ]> and associated covariance
Pk+1 are predicted as

Chapter 3. Distributed Localization in a Cooperative Team 59
xk+1 = f(xk, ak)
Pk+1 =
Fk 0 0
0 I 0
0 0 I
Pk +
Qk 0 0
0 0 0
0 0 0
(3.25)
where I is the identity matrix in proper size.
3.4.2.3 Local Measurement Update
The measurement matrix Hk is sparse as it only affects a few subblocks
within the corresponding entry for xk in the information pair. It allows an
additive update to the delta information as
Λ+k = Λk + H>k R−1
k Hk
η+k = ηk + H>k R−1
k (zk − h(xk)−Hkxk)
(3.26)
where the superscript “+” means the observation is given up to and in-
cluding time step k. It is noted that the local measurement may not be
available at every time step.
The local measurement updates xk and Pk in a standard Kalman filter
way.

Chapter 3. Distributed Localization in a Cooperative Team 60
3.4.2.4 Cooperative Localization with Relative Measurement
We denote the information set kept at the PV as (xk,Pk,Λp, ηp)P. Similarly,
the subscript to the information set is R for the RV. It should be noted
that in a team containing more than two vehicles, the time step t recorded
at PV and RV may not be the same.
Delta information for cooperation
Both PV and RV form their delta information such that
∆Λk = Λk −
0 0
0 Λp
∆ηk = ηk −
0
ηp
(3.27)
The PV broadcasts the delta information (∆Λk,∆ηk)P together with (xk,Pk)P
in a packet. The RV receives the packet and obtains the acoustic ranging
as well.
Incorporating the delta information
When the broadcast from PV is received, the RV firstly forms a information
pair corresponding to the combined state vector [x>k,R, x>t,R, x
>t,P, x
>k,P]>. The

Chapter 3. Distributed Localization in a Cooperative Team 61
information matrix consists of three parts: the delta information from the
PV ∆Λk,R, the delta information from the RV ∆Λk,P, and the information
matrix Λt corresponding to [x>t,R, x>t,P]>. Λt is corresponding to [x>t,R, x
>t,P]>.
Assuming the states xc,R and xc,P are from the same source and fully
correlated, a bounding joint covariance for states xt,R and xt,P can be de-
rived. We use split covariance intersection (SCI) [52] to form the bounding
covariance. (In a comparative study later, we show the benefit introduced
by the delta information in DEIF over a pure SCI filter.) At both PV
and RV sides, given the covariance matrix
Pt Ptc
Pct Pc
(corresponding to
[x>t , x>c ]>), the split form for xt is
Pt = PIND. + PDEP.
PIND. = Pt −PtcP−1c Pct
PDEP. = PtcP−1c Pct.
(3.28)
The reason is that xt−PtcP−1c xc and xc are independent, and xc represents
the source of information shared from the team.
The split covariance matrix for [x>t,R, x>t,P]> is therefore
PIND.,R +PDEP.,R
κ0
0 PIND.,P +PDEP.,P
1−κ
t
, (3.29)

Chapter 3. Distributed Localization in a Cooperative Team 62
and κ ∈ [0, 1]. The value of κ is obtained by minimizing the error co-
variance of RV after the relative measurement update. The corresponding
information pair for [x>t,R, x>t,P]> is formed as
Λt =
PIND.,R +PDEP.,R
κ0
0 PIND.,P +PDEP.,P
1−κ
−1
t
ηt = ΛtE([x>t,R, x>t,P]>).
(3.30)
The information pair (Λk, ηk) corresponding to the combined state vec-
tor [x>k,R, x>t,R, x
>t,P, x
>k,P]> is formed in Equation (3.31), where ∆η∗k,P and
∆Λ∗k,P are the rearranged ∆ηk,P and ∆Λk,P, according to the reversed se-
quence [x>t,P, x>k,P]>. Zeros are padded before and after where needed. The
zero padding and addition are illustrated in Figure 3.10.

Chapter 3. Distributed Localization in a Cooperative Team 63
Λk =
∆Λk,R · · · 0
.... . .
...
0 · · · 0
+
0 · · · 0 · · · 0
......
......
...
0 · · · Λt · · · 0
......
......
...
0 · · · 0 · · · 0
+
0 · · · 0
.... . .
...
0 · · · ∆Λ∗k,P
ηk =
∆ηk,R
...
0
+
0
...
ηt
...
0
+
0
...
∆η∗k,P
(3.31)
Figure 3.10: Illustration of incorporating delta information in simpleaddition.

Chapter 3. Distributed Localization in a Cooperative Team 64
Relative measurement update
With the information pair (Λk, ηk), a measurement update can be made in
the same way as Equation (3.26).
Information set update
After broadcasting out its information set, PV considers its state xk as fully
correlated with the team, and assigns it to xt. States at time steps prior
to k are discarded. The RV assigns the updated xk,R to xt. The received
xk,P is recorded as xc. At both sides, the most recent cooperation time t
is assigned the value of k. The corresponding information pair (Λp, ηp) is
recorded.
3.4.3 Simulation Studies Using Field Experiment Data
We compare the performance of the proposed DEIF with several other
methods using both simulated data and experimented data for a team of
three vehicles. The experimented data was collected from a team of three
vehicles executing lawnmower surveys in Singapore waters (Figure 3.11).
While executing the planned path, vehicles experience propagation noise

Chapter 3. Distributed Localization in a Cooperative Team 65
introduced by choppy water, system hardware and so on. Local measure-
ments such as GPS positions (if the vehicle is on the surface), or bathymet-
ric measurements (for submerged vehicles in a known terrain), are fused to
improve localization. Vehicles may not get good local measurements about
their positions all the time. For example, vehicles may submerge through-
out the mission, or the sea bottom is smooth without much variation to
provide rich bathymetry information. The cooperation happens when one
vehicle broadcasts and the other two vehicles receive the information set.
Figure 3.11: Cooperative localization results with field data.
When the inter-vehicle correlation is unknown due to packet loss, we
show that DEIF performs better than the filter ignoring the correlation
or overestimating the correlation. The effectiveness and advantages will
be demonstrated by illustrative examples and comparative results from
simulated and experimented data as follows.

Chapter 3. Distributed Localization in a Cooperative Team 66
3.4.3.1 Simulated Data
The simulated data mimics the experimented data, using identical sensor
characteristics and the same trajectories. In this simulation, vehicles take
turns to broadcast their information every 10 seconds. The transmission
packets are lost at a rate of pL. All vehicles cruise on surface and have GPS
fixes in the first 100 seconds. Only Vehicle 2 re-surfaces at 420 seconds
for 50 seconds. The results are evaluated in two metrics: the normalized
estimation error squared (NEES) and root mean square error (RMSE). The
NEES provides a measurement of estimation consistency [12]. Under ideal
conditions, the NEES has a degree-of-freedom (DoF) equal to the dimension
of the state (in our case, DoF is 2). The RMSE records the estimated error
in distance, compared with the true position. Figure 3.12 shows the NEES
and RMSE over 10 runs for Vehicle 3 at different packet loss rate. The
arrows indicate the successful reception of the broadcast.
SKF stands single Kalman filter. NKF stands for naıve Kalman filter.
It claims to have the lowest RMSE but has severe problem with estimation
consistency. This is especially the case when vehicles communicate at high
frequency (with lower packet loss rate). The estimation error given by
NKF is in fact much higher than the error it claims to be. When vehicles
seldom communicate and are mostly independent of each (Figure 3.12(d)),
the naıve assumption by NKF is almost met, and therefore a consistent

Chapter 3. Distributed Localization in a Cooperative Team 67
(a) (b)
(c) (d)
Figure 3.12: Simulation results for Vehicle 3 at packet loss rate (a)pl = 0 (b) pl = 0.3 (c) pl = 0.6 and (d) pl = 0.9. The vertical arrowsshow the time when Vehicle 3 receives broadcast. DEIF has smallerestimation error than SKF and SCI filters, and better consistency than
NKF.
estimation is given.
We also compare the proposed method with SCI filter from [52]. In
the SCI filter, assuming each state consists of correlated component and

Chapter 3. Distributed Localization in a Cooperative Team 68
independent component, whose covariances are
PPV = PIND.,P + PDEP.,P
PRV = PIND.,R + PDEP.,R.
(3.32)
As the range-only measurement is not enough to formulate a full estimate
of the RV position, SCI filter in [52] can not be applied directly for the
cooperation. We follow the idea of SCI and form a consistent covariance P
for the combined state vector [x>RV, x>PV]>. The P is therefore
P =
PIND.,R +PDEP.,R
κ0
0 PIND.,P +PDEP.,P
1−κ
= PIND. + PDEP..
(3.33)
The range measurement is used to update the combined state vector in stan-
dard Kalman filter way. The independent component for RV is obtained in
the corresponding entries of the combined independent component
P+IND. = (I−K)
PIND.,R 0
0 PIND.,P
(I−K)> + KRK>. (3.34)
We can see that with more frequent cooperation (lower packet loss rate),
SCI tends to be over conservative about its estimation. In the other hand,
EIF estimation maintains good consistency and performs better than SCI

Chapter 3. Distributed Localization in a Cooperative Team 69
on all occasions.
3.4.3.2 Experiment Data
The navigation data is used in the offline processing to compare different
estimation filters. In the experiment, GPS logs are used as the benchmark
to compute positioning errors. The arrows in Figure 3.13 indicate the time
when the broadcasts are sent and successfully received by other vehicles.
In the first 100 seconds, Vehicles 1 and 3 have good local measurements.
Vehicle 2 exhibits a slow position drift with the information shared by Ve-
hicles 1 and 3. Vehicle 2 obtains good local measurements from 200 to
300 seconds, and from 600 seconds onward. The proposed DEIF success-
fully improves estimation accuracy of all vehicles. In the two highlighted
boxes, we can see that Vehicles 1 and 3 get position improvements from
the broadcast given by Vehicle 2. Meanwhile, Vehicle 2 also benefits from
the information sharing (at 400 seconds). On the other hand, the localiza-
tion improvement for Vehicle 1 is less using an NKF. For Vehicles 2 and 3,
the localization by NKF is even worse than the single vehicle localization
(SKF).

Chapter 3. Distributed Localization in a Cooperative Team 70
Figure 3.13: Cooperative localization results with field data. Thearrows indicate the time when the broadcasts are sent and successfullyreceived by other vehicles. NKF estimation sometimes is worse than
SKF. DEIF improves estimation accuracy of all vehicles.
3.5 Summary
Although underwater communication is difficult, natural behaviors such
as fish schooling have shown that limited communication still helps im-
prove the overall performance. We have shown that cooperation under
constrained communication make the distributed localization outperform
the single-vehicle localization. However, the estimation may degenerate
when the packet loss is beyond some point. This is due to the information
double counting when the correlation is ignored. We also showed that dis-
tributed processing has some information loss even the correlation is exactly
known. The reasons of these two will be explored in the next chapter.
With the challenges imposed by the underwater communication, we

Chapter 3. Distributed Localization in a Cooperative Team 71
reported the design and implementation of a distributed extended informa-
tion filter for cooperative multi-AUV localization. This DEIF is especially
suitable for underwater vehicles where the communication links have the
problems of limited bandwidth and lossy packets.
Multi-vehicle cooperative localization is essentially a type of data fusion
in cooperative intelligent vehicles. Data fusion, which aims at integration
of data and knowledge from multiple sources, is an important process to
achieve a better estimation in various applications. The proposed filter
can also be used for cooperative object tracking, cooperative environment
sensing or map building.
When vehicles have precise local measurements and/or infrequent com-
munications, the inter-vehicle correlation may become trivial. In such a
case, ignoring correlation in fusion might be able to work. We will discuss
this in the next chapter.

Chapter 4
When Can One Ignore the
Correlation?
4.1 Problem Statement
In the previous chapter we offer a distributed localization method dealing
with unknown correlation due to lossy underwater communication. How-
ever, a naıve assumption which simply ignores the correlation when fusing
data from different sources, was adopted in [80, 82]. It is simple in complex
cooperation applications and seems to be working fine in existing works.
We want to understand when this assumption is reasonable, and when is
detrimental.
72

Chapter 4. When can One Ignore the Correlation? 73
There are two types of cooperative localization problems: the multi-
sensor tracking problem and the multi-vehicle localization problem. The
multi-sensor tracking problem is concerned with a team of cooperative
nodes tracking a common target, whereas the multi-vehicle localization
problem deals with a team of cooperative vehicles estimating their own po-
sitions. In both problems, individual nodes or vehicles have no idea about
the whole team; they also do not share every detailed local observation.
Information is shared across the team and estimation is improved over the
ones with single sensor tracking or single vehicle localization (without co-
operation). We illustrate the idea by exploring the information flow in the
decentralized system. We quantify the situation where the correlation can
be safely ignored. We would like to ensure the estimation consistency when
bathymetry information is incorporated into cooperative localization.
The work in this chapter was published in [70].
4.2 Multi-Sensor Tracking Problem
We present a simple example where two sensor nodes are tracking a com-
mon target. The central filter (CF) and single filter (SF) are used as the
performance benchmarks. We answer the following questions:
• What is the optimal distributed filtering?

Chapter 4. When can One Ignore the Correlation? 74
• Is there any gap between the optimal distributed filtering and the
central filtering? If so, what is the gap?
• When can one ignore the correlation in fusion? When does the naıve
assumption in filtering fail?
These answers give us a clear understanding about the pros and cons
of implementing naıve filtering (NF) in the distributed localization.
Figure 4.1: Multi-sensor tracking: a recursive two-step flow chart.The target propagates from previous position xk to current positionxk+1 with some propagation noise ωk. At each step, each node makes
an observation (z(1) or z(2)) about the target position.
Figure 4.1 shows a recursive two-step process where two sensor nodes
(node 1 and 2) track a target with position state x of size n×1. The target
propagates from previous position xk to current position xk+1 with some

Chapter 4. When can One Ignore the Correlation? 75
propagation noise ωk. At each step, each node makes an observation (z(1)
or z(2)) about the target position. The propagation model and observation
models are
xk+1 = xk + ωk
z(1)k = xk + ν
(1)k
z(2)k = xk + ν
(2)k
(4.1)
where the propagation noise ω and observation noises ν(1) and ν(2) at all
steps are independent zero-mean Gaussian processes with covariances Q,
R(1) and R(2). Without loss of generality, we assume det R(1) ≤ det R(2).
The problem is to find the best estimate yk+1 about the target position
xk+1. We assess the filters’ one-step and asymptotic performances. With
the knowledge about target position at the previous step xk, one-step per-
formance is the filter performance at the next step. When filters continue
to be implemented over many steps, the estimation reaches a stable state
where asymptotic performance can be derived.
Assuming a central unit with access to the local sensor data in real time,
the central filtering (CF) simply stacks the local observations made at two
nodes and follows the Kalman filtering to update the predicted estimate
about the target. Similarly, single filtering (SF) follows Kalman filtering
and uses the sensor data at node 1 only without cooperation from the other
node.

Chapter 4. When can One Ignore the Correlation? 76
Let the error covariance of the position estimate about state xk be Pk.
The estimate about the state xk is yk = E[xk]. The one-step SF gives
estimate with error covariance
PSF =(I− (Pk + Q)(Pk + Q + R(1))−1
)(Pk + Q) (4.2)
and one-step CF gives
PCF =(I− (Pk + Q)HCFS−1
CF
)(Pk + Q) (4.3)
where
SCF = H(Pk + Q)H>CF +
R(1) 0
0 R(2)
HCF =
I
I
(4.4)
and I is the identity matrix of size n× n.
When the target keeps moving and observations are made at every
step at the two nodes with the same settings, the filters reach stable states
in which the estimation and performance approach constant values. The
stable state estimation error covariances for both filters are derived by
setting PSF = Pk and PCF = Pk. In 1-dimensional space where n = 1,

Chapter 4. When can One Ignore the Correlation? 77
they are
PSF,ss =−Q +
√Q2 + 4QR(1)
2
PCF,ss =−Q +
√Q2(R(1)+R(2))+4QR(1)R(2)
R(1)+R(2)
2.
(4.5)
The CF result is similar to SF but at each time the observation data is
fused by the two sensor data. This ‘fused’ observation therefore has error
covariance (R(1)−1+ R(2)−1
)−1.
It should be noted that the estimates by CF and SF are consistent in
that the actual error covariance of the estimate E[(y − x)(y − x)>] equals
the estimated error covariance P. Therefore we only state one of them here.
The performances of CF and SF are shown in the subsequent sections.
4.2.1 Optimal Distributed Filtering
4.2.1.1 Deriving the Optimal DF
The recursive two-step distributed filtering is shown in Figure 4.2. At the
previous step k, sensor nodes exchange their local estimates and obtain
a fused estimate y(f)k = yk with error covariance P
(f)k = Pk. This fused
estimate about the previous position xk is adopted by both nodes. After
that, the target position is predicted at each node locally, and updated
with local sensor data following the standard Kalman filtering method. At

Chapter 4. When can One Ignore the Correlation? 78
Figure 4.2: Multi-sensor tracking: distributed filtering using weighted-sum fusion.
the current step k + 1, again sensor nodes exchange their local estimates
y(1)k+1 and y
(2)k+1 and obtain the fused estimate y
(f)k+1. We use weighted sum
to fuse the two estimates with weight λ
y(f)DF = f(y
(1)k+1,y
(2)k+1)
= (1− λ)y(1)k+1 + λy
(2)k+1.
(4.6)

Chapter 4. When can One Ignore the Correlation? 79
With the fused estimate y(f)k and estimated error covariance P
(f)k , the local
estimates are for nodes i = 1, 2
y(i) = P(i)(P(f)k
−1y
(f)k + R(i)−1
z(i)k+1)
P(i) = (R(i)−1+ P
(f)k
−1)−1
(4.7)
The optimal weights λ∗ is derived by minimizing the error covariance E[(y(f)DF−
xk+1)(y(f)DF − xk+1)>] and in 1-dimensional space we obtain
λ∗ = arg minE[(y(f)DF − xk+1)2]
=R(1)
R(1) + R(2).
(4.8)
With this optimal weight, the error covariance E[(y(f)DF−xk+1)(y
(f)DF−xk+1)>]
of the fused estimate turns out to be identical with Bar Shalom’s state
vector fusion (SVF) [13]
P(f)SVF = P
(1)k+1−(P
(1)k+1−P
(12)k+1)(P
(1)k+1+P
(2)k+1−P
(12)k+1−P
(12)k+1
>)−1(P
(1)k+1−P
(12)k+1
>)
(4.9)
where the cross-correlation P(12)k+1 =E[(y
(1)k+1−xk+1)(y
(2)k+1−xk+1)>] between
the two estimates is required. Although P(12)k+1 is not required for optimal
fusion of the estimate in DF, it is required for a consistent estimation on
the error covariance P(f)DF
∗which can be used for the subsequent steps. The
stable state error covariance of optimal DF can also be derived by setting

Chapter 4. When can One Ignore the Correlation? 80
P(f)DF
∗= Pk.
4.2.1.2 The Gap between the Optimal DF and CF
Figure 4.3: One-step error covariances of DF, SF, CF and SVF, againstthe weight λ used by DF. There is a gap between CF and optimal DF
(SVF).
Figure 4.3 shows an example of the one-step performance comparing
the error covariances of the estimates by DF, SF, CF and SVF, against the
weight λ used by DF. The optimal weight λ∗ is obtained at the lowest point
of the DF curve, which gives identical performance as SVF. There is a gap
between the optimal DF (or SVF) and CF. The same idea was stated by
Bar-Shalom in [11]

Chapter 4. When can One Ignore the Correlation? 81
The sufficient statistics for the global data set Dij = Di⋃Dj
cannot be expressed in terms of the sufficient statistics of the
local data sets Di and Dj (the local estimates xi and xj).
We have discussed the similarity information loss in distributed localization
in Chapter 3. There is information loss when processed data (estimates)
are transmitted instead of raw data (observations). This is because the
CF is a Maximum a Posteriori (MAP) estimation which estimates the un-
observed target position state x with two observations z(1) and z(2). The
prior distribution is known as N (x,Pk + Q). In the other hand, DF treats
the two local estimates y(1)k+1 and y
(2)k+1 as two ‘observations’. The fusion
is a Maximum Likelihood (ML) estimation without using the prior knowl-
edge about the state [23]. This is the best that distributed estimation can
achieve when only local estimates are available for fusion. Therefore it is
optimal only in the ML context. We take SVF as an example, since it is
identical to the optimal DF. Let the error covariance of the two estimates
from the nodes be
PSVF =
P(1)k+1 P
(12)k+1
P(12)k+1
>P
(2)k+1
(4.10)

Chapter 4. When can One Ignore the Correlation? 82
where
P1 = E[(y(1)k+1 − xk+1)(y
(1)k+1 − xk+1)>]
P2 = E[(y(2)k+1 − xk+1)(y
(2)k+1 − xk+1)>]
P(12)k+1 = E[(y
(1)k+1 − xk+1)(y
(2)k+1 − xk+1)>]
(4.11)
The target position xk+1 is to be determined based on the two ‘observations’
y(1)k+1 and y
(2)k+1. The logarithm of the likelihood function L(xk+1; y
(1)k+1,y
(2)k+1)
is
lnL(xk+1; y(1)k+1,y
(2)k+1)
= ln 2π − 1
2ln(
det(PSVF)
+ (
y(1)k+1
y(2)k+1
− xk+1
xk+1
)>P−1SVF(
y(1)k+1
y(2)k+1
− xk+1
xk+1
)).
(4.12)
It is maximized by setting∂L(xk+1;y
(1)k+1,y
(2)k+1)
∂x= 0. The optimal estimate for
position state x in 1-dimensional space is
y∗ML = arg maxL(xk+1; y(1)k+1,y
(2)k+1)
=P
(2)k+1y
(1)k+1 + P
(1)k+1y
(2)k+1 −P
(12)k+1(y
(1)k+1 + y
(2)k+1)
P(1)k+1 + P
(2)k+1 − 2P
(12)k+1
.
(4.13)
The volume ratio of the error covariances compared with CF is
det P(f)SVF
det PCF
=det P
(f)DF
∗
det PCF
. (4.14)

Chapter 4. When can One Ignore the Correlation? 83
Figure 4.4 shows that the ratio is always less than one for n = 1. The axes
are R(1) and R(2) normalized by Pk + Q .
Figure 4.4: Ratio of error covariances - optimal DF (SVF) to CF isno larger than one.
4.2.2 When Can One Ignore the Correlation?
The naıve filter (NF) simply fuses the two estimates assuming no correla-
tion between them. The procedure is similar to DF in Figure 4.2 but the
weight of fusion is calculated by the estimated error covariances, that is,
λNF = P(1)k+1P
(f)−1. The fused estimate is
y(f)NF = (I− λNF)y
(1)k+1 + λNFy
(2)k+1
P(f)NF = (P
(1)k+1
−1+ P
(2)k+1
−1)−1.
(4.15)

Chapter 4. When can One Ignore the Correlation? 84
The resulting error covariance of the fused estimate is E[(y(f)NF−xk+1)(y
(f)NF−
xk+1)>].
By ignoring the correlation, the common information from the two
estimates is double counted in the fusion, which leads to estimation over-
confidence. The estimated error covariance P(f)NF is smaller than the actual
error covariance, that is det(P(f)NF) < detE[(y
(f)NF − xk+1)(y
(f)NF − xk+1)>].
In fact, the estimated error covariance is even smaller than the estimated
covariance by CF. The overconfidence prevents utilization of subsequent
useful information and therefore the actual error covariance of NF estimate
is sometimes even worse than that of SF. In such a case, cooperation using
NF is no longer advantageous. We call it the ‘dangerous ’ region. Naıve
assumption fails here, that is when
detE[(y(f)NF − xk+1)(y
(f)NF − xk+1)>] > det PSF. (4.16)
When the above inequality is not met, we consider that it is safe to use NF
and one can ignore the correlation.

Chapter 4. When can One Ignore the Correlation? 85
4.2.2.1 One-step Performance
We calculate the one-step dangerous region when the inequality in Equa-
tion (4.16) is met. For n = 1 the dangerous region is derived as
R(2) > 1
R(1)
R(2)+ R(2) + 3R(1)R(2) ≤ R(2)
(4.17)
where R(1) and R(2) are the normalized error covariances and R(i) =
R(i)/(Pk + Q), i = 1, 2. It is plotted in Figure 4.5. We can see that it
is safe to use the one-step NF only if both local observations have very
small errors compared with the sum of the estimation error and propa-
gation error, or when the two local sensors have comparable observation
errors.
0 2 4 6 8 100
2
4
6
8
10
R(1)/(Pk+Q)
R(2) /(Pk+Q)
Figure 4.5: One-step performance: the dangerous region of imple-menting NF (assuming R(1) < R(2)).

Chapter 4. When can One Ignore the Correlation? 86
4.2.2.2 Asymptotic Performance
(a)
(b)
Figure 4.6: Naıve filter in stable state: (a) Actual error covarianceis smaller than SF. (b) Actual error covariance eventually gets worsethan SF. In both cases, NF is overconfident about its estimation. The
estimated error covariance by NF is even lower than the one by CF.
After the first step, if we continue to ignore the correlation and fuse the
estimates with weights calculated from the estimated error covariances, the
actual estimation error is likely to diverge and degrade further. Figure 4.6
shows two cases in stable state. The blue dots are the actual (by Monte
Carlo simulation) error covariances of the NF estimates. The horizontal

Chapter 4. When can One Ignore the Correlation? 87
line is the calculated asymptotic error covariances for NF estimates. The
blue dashed line shows the estimated error covariances given by NF. We can
see that NF is overconfident about its estimates. In Case (b), even though
in the first step (Step 2) NF gives improvement over SF, its estimation
error becomes larger than SF from Step 4 onward.
Case (a)
Case (b)
0 5 10 15 20 250
5
10
15
20
25
R(1)/Q
R(2) /Q
Figure 4.7: Asymptotic performance: the dangerous region of imple-menting NF (assuming R(1) ≤ R(2)).
We calculate the stable state error covariances of NF estimates. Com-
pared with stable state SF error covariances, the asymptotic dangerous
region is plotted in Figure 4.7. It should be noted that the asymptotic
performance does not depend on initial error covariance, and therefore the
axes are R(1) and R(2) normalized by the process noise error covariance Q.
The two cases in Figure 4.6 are located in the plot. We can see that if the

Chapter 4. When can One Ignore the Correlation? 88
two local sensors have small measurement errors (compared with process
noise), one can ignore the correlation.
4.2.3 Summary
In this section, we examined the performances of distributed processing
in underwater multi-sensor tracking problem. We showed that the optimal
distributed filter is achieved only when correlation is exactly tracked. How-
ever, there is still information loss due to transmission of the processed data
instead of the raw data. We also showed the consequence of ignoring the
correlation - the estimation overconfidence and estimation divergence. The
actual estimation is worse than it is belived to be in the filter, and could be
worse than the single filter without cooperation. We derived the danger-
ous regions of implementing naıve filter. This can be used as a guideline
for conditions under which one can ignore the correlation for underwater
cooperative tracking.
4.3 Multi-Vehicle Localization
Multi-vehicle localization can be viewed as cooperative network where each
node estimates its own state. Different from multi-sensor tracking problem,
there are many states to be estimated (one for each node), and there is a

Chapter 4. When can One Ignore the Correlation? 89
relative measurement relating the states of the cooperating nodes. Fig-
ure 4.8 shows the Bayesian network of two cooperating vehicles (Vehicle i
and Vehicle j). The unobserved position state variables are x(i)k and x
(j)k .
The observed variables are the observations z(i)k or z
(j)k made at Vehicle i
or j locally about their positions and relative distance rk between them.
k = 0, 1, 2, . . . denotes the discrete time step.
Figure 4.8: Bayesian network for cooperative localization of two ve-hicles: shaded nodes are observations and white nodes are unobserved
position state variables.
The position of Vehicle i (so as Vehicle j) propagates as
x(i)k+1 = f(x
(i)k ) + ω
(i)k
= x(i)k + v
(i)k + ω
(i)k
(4.18)

Chapter 4. When can One Ignore the Correlation? 90
where v is the known speed. The observations are
z(i)k = h(x
(i)k ) + ν
(i)k
= x(i)k + ν
(i)k
z(j)k = h(x
(j)k ) + ν
(j)k
= x(j)k + ν
(j)k
rk = x(i)k − x
(j)k + υk
(4.19)
4.3.1 Information Flow when Ignoring Correlation
Assuming all the noises and priors are Gaussian distributed, the joint Gaus-
sian distribution of state x and observations z is given by
Prob(
x
z
) = αe12 (
x
z
− µ)>Λ(
x
z
− µ) (4.20)
where µ =
µx
µz
=
E(x)
E(z)
and Λ is the precision matrix (or inverse
covariance matrix). Λ has the following blockwise structure:
Λ =
Λxx Λxz
Λzx Λzz
= P−1 (4.21)

Chapter 4. When can One Ignore the Correlation? 91
where P is the covariance matrix for
x
z
and P =
Pxx Pxz
Pzx Pzz
. It
should be noted that the subscripts of the subblocks Λxx, Λxz = Λ>zx and
Λzz are denote the sizes corresponding to x and z. Λ−1xx is the conditional
covariance of x given all the observations z. It describes the covariance of
the Gaussian probability p(x|z). We define the conditional covariance as
Cx|z = Λ−1xx
= Pxx −PxzP−1zz Pzx.
(4.22)
This is also the result of block matrix inversion. We also have
P−1xx = Λxx −ΛxzΛ
−1zz Λ>xz. (4.23)

Chapter 4. When can One Ignore the Correlation? 92
When z are linear observations about x, z = Hx + ν, we have z ∼
N (Hx,R) and
Pxz = P>zx = PxxH>
Pzz = HPxxH> + R
Λxx = H>R−1H + P−1xx
Λxz = −ΛxxPxzP−1zz
= −(H>R−1H + P−1xx)PxxH
>(HPxxH> + R)−1
= −(H>R−1HPxxH> + H>)(HPxxH
> + R)−1
= −(H>R−1HPxxH> + H>R−1R)(HPxxH
> + R)−1
= −H>R−1(HPxxH> + R)(HPxxH
> + R)−1
= −H>R−1
Λ−1zz = R.
(4.24)
The probability distribution of x given z is given by Bayesian Theorem
p(x|z) =p(z|x)p(x)
p(z)
= (2π)−nz2 R−
12 exp{−1
2(z−Hx)>R−1(z−Hx)}
×(2π)−nx2 P
− 12
xx exp{−1
2(x− µx)>P−1
xx(x− µx)}
×(2π)nz2 P
12zz exp{1
2(z− µz)
>P−1zz (z− µz)}.
(4.25)
We examine the exponents and look for an estimated mean x about x
given z, such that p(x|z) is maximized. The maximum ln p(x|z) is found

Chapter 4. When can One Ignore the Correlation? 93
by taking the derivative ∂ ln p(x|z)∂x
= 0. Therefore in Equation (4.25) we are
only interested in the exponent terms involving x. We are now left with
− 1
2(z−Hx)>R−1(z−Hx)− 1
2(x− µx)>P−1
xx(x− µx)
=− 1
2[z>R−1z + x>H>R−1Hx− z>R−1Hx− x>H>R−1z
+ x>P−1xxx− x>P−1
xxµx − µ>x Pxxx + µ>x Pxxµx].
(4.26)
Again we drop the terms not involving x. We group the similar terms with
respect to x and denote it as a function of x, that is
g(x) = −1
2[x>(H>R−1H + P−1
xx)x− (z>R−1H + µ>x Pxx)x− x>(H>R−1z + P−1xxµx)]
= −1
2[x>Ax− b>x− x>b]
(4.27)
where A = H>R−1H + P−1xx = Λxx is symmetrical and b = H>R−1z +
P−1xxµx = −Λxzz + P−1
xxµx. We can denote ln p(x|z) = B + g(x) where B

Chapter 4. When can One Ignore the Correlation? 94
groups all the terms not involving x. The solution of x is found such that
∂ ln p(x|y)
∂x=∂(B + f(x))
∂x
=∂f(x)
∂x
= −1
2(∂x>Ax
∂x− ∂b>x
∂x− ∂x>b
∂x)
= −1
2[x>(A + A>)− b> − b>]
= −(x>A− b>)
= 0
(4.28)
Therefore we have Ax = b. Substituting everything back, we have the
exact inference about x given all observations z as a solution to:
Λxxx = P−1xxµx −Λxzz. (4.29)
The exact estimation can be obtained through Kalman filtering step by
step. We convert the Bayesian network in Figure 4.8 into Markov net
where only unobserved state variables are shown (Figure 4.9(c)).
A central filtering stacks the state variables and observations such that
x =[x(i)k
>,x
(j)k
>, . . . ,x
(i)1
>,x
(j)1
>,x
(i)0
>,x
(j)0
>]>
z =[z(i)k
>, z
(j)k
>, r>k , . . . , z
(i)1
>, z
(j)1
>, r>1 , z
(i)0
>, z
(j)0
>, r>0 ]>
(4.30)
with variables at the last (current) step k as the first elements. We are

Chapter 4. When can One Ignore the Correlation? 95
interested to know the estimated mean about state x(i)k . In the case of
1-dimensional space, we define the estimated error covariance correspond-
ing to x(i)k as σ2 and σ2 = Cx|z(1, 1). We define the error covariance of
the estimated mean for state x(i)k as δ2 and δ2 = E[(x
(i)k − x
(i)k )2]. The
central Kalman filter has all information about the state and observations.
Therefore we have an optimal filter which utilizes information fully and
gives exact estimation performance as the estimated error covariance, that
is σ2 = δ2.
A distributed naıve filter simply ignores the inter-vehicle correlation
and treats the information from the two vehicles as independent. We rep-
resent the estimation which ignores the correlation by unwrapping the full
graphic model. We show how the naıve filtering deviates from the central
estimator. The unwrapped network has all symbols with a tilde on top, for
example, estimated mean is µ, estimated covariance is σ2, and actual error
covariance is δ2 of the estimated mean.
We plot the unwrapped graphs in Figure 4.9 for k = 1, 2. It can be
seen that the unwrapping simply replicates the past nodes exponentially
with x(i)k and x
(j)k being the root nodes. The unwrapped structure assumes
the duplicated nodes are from independent sources (independent priors and
observations). The exact inference for the unwrapped network is obtained
by
Λxxˆx = P−1
xxµx − Λxzz. (4.31)

Chapter 4. When can One Ignore the Correlation? 96
(a) Full graph (k=1). (b) Unwrapped graph (k=1).
(c) Full graph (k=2).
(d) Unwrapped graph (k=2).
Figure 4.9: Full graph vs. Unwrapped graph with information doublecounting for k = 1, 2: the prime symbol indicates the replication of
nodes.

Chapter 4. When can One Ignore the Correlation? 97
The replication from the original full network is represented by the mapping
matrices Ox and Oz such that
x = Oxx
z = Ozz.
(4.32)
For example, for k = 1, the mapping matrices are
Ox =
1 0
0 1
0 1
=
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
0 0 1 0
0 0 0 1
Oz =
1 0
0 1
0 1
=
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
(4.33)

Chapter 4. When can One Ignore the Correlation? 98
where the bold zeros and ones are the block zero matrix and identity matrix
respectively, in appropriate sizes (2×2 for Ox and 3×3 for Oz). For k = 2,
we have
Ox =
1 0 0
0 1 0
0 0 1
0 1 0
0 0 1
0 0 1
0 0 1
. (4.34)
In the mapping, state variables xi, x′i, x′′i and so on are copies of xi;
so are the observations. However, the unwrapped network enables a way
for the estimation not to count in the duplication. The independence as-
sumptions are reflected in the structure of Λ. The precision matrix (Λ
or Λ) describes the pairwise statistical relationship given all other nodes.
In a Markov network, the entries of precision matrix are only nonzero for
neighboring nodes. The relationship between the precision matrices Λ and
Λ is listed below:
1. ΛxzOz = OxΛxz and ΛxzO>z = O>x Λxz: as Λxz is block-diagonal and
the block diagonals of Λxz are simply replicates of the block diagonals
of Λxz. Λxz and Λxz are equal after partially being projected to each
other’s domain.

Chapter 4. When can One Ignore the Correlation? 99
2. Λzz and Λzz are diagonal matrices and OzΛ−1zz = Λ−1
zz Oz: Λ−1zz is the
diagonal observation error covariance matrix. Λ−1zz replicates the
block diagonals (set of observations) of Λ−1zz . Similarly, Λ−1
zz and Λ−1zz
are equal after partially being projected to each other’s domain.
3. An error matrix E is defined such that ΛxxOx + E = OxΛxx: the row
of E consists all zeros for the nodes who have the same neighbors in
the unwrapped network as the original nodes in the full network.
4. E = −(P−1xxOx −OxP
−1xx): the property is proved by using block ma-
trix inversion and the relationship summarized above.
Proof. Using the block matrix inversions
P−1xx = Λxx −ΛxzΛ
−1zz Λ>xz,
P−1xx = Λxx − ΛxzΛ
−1zz Λ>xz,

Chapter 4. When can One Ignore the Correlation? 100
we have
Ox(Λxx −P−1xx)− (Λxx − P−1
xx)Ox
=OxΛxzΛ−1zz Λ>xz − ΛxzΛ
−1zz Λ>xzOx by block matrix inversion
=ΛxzOzΛ−1zz Λ>xz − ΛxzΛ
−1zz OzΛ
>xz by relationship between Λxz and Λxz
=Λxz(OzΛ−1zz − Λ−1
zz Oz)Λ>xz grouping the similar terms
=0. as OzΛ−1zz = Λ−1
zz Oz
The changes in the deviation are underlined, and explanations given on the
same lines. Meanwhile, as the error matrix is defined as E = OxΛxx −
ΛxxOx, we have
Ox(Λxx −P−1xx)− (Λxx − P−1
xx)Ox = E + (P−1xxOx −OxP
−1xx).
Therefore
E = −(P−1xxOx −OxP
−1xx).
The relationship and properties here will be used in the proofs in the
following sections.

Chapter 4. When can One Ignore the Correlation? 101
4.3.1.1 Estimated Covariance
The inference about the estimated covariance of node x(i)k was derived in
[87] but we restate it as there is some difference in the way of unwrapping.
Let e be a column vector with the first element valued as 1 and all other
elements, zero (e(1) = 1 and e(i) = 0, i 6= 1).
ΛxxCx|z = I (4.35)
ΛxxC>x(1)|z = e taking first column of each side (4.36)
OxΛxxC>x(1)|z = Oxe left-multiplied by Ox (4.37)
(ΛxxOx + E)C>x(1)|z = Oxe as ΛxxOx + E = OxΛxx (4.38)
ΛxxOxC>x(1)|z + EC>x(1)|z = Oxe. (4.39)
For the unwrapped network, we have similar equation
ΛxxC>x(1)|y = e. (4.40)
We subtract Equation (4.40) from Equation (4.39) and get
ΛxxC>x(1)|z = ΛxxOxC
>x(1)|z + EC>x(1)|z + e−Oxe
C>x(1)|z = OxC>x(1)|z + Λ−1
xxEC>x(1)|z + Λ−1xx(e−Oxe).
(4.41)

Chapter 4. When can One Ignore the Correlation? 102
As the first row of Λ−1xx is Cx(1)|z, taking the first element (row) of both
sides gives the relationship between σ2 and σ2
σ2 = σ2 + Cx(1)|zEC>x(1)|z + Cx(1)|z(e−Oxe)
= σ2 + Cx(1)|zEC>x(1)|z.
(4.42)
The last term is dropped as our unwrapping contains no duplication of the
root node and therefore e−Oxe = 0.
The difference Cx(1)|zEC>x(1)|z in Equation (4.42) is actually the first
element (entry (1, 1)) of matrix multiplication Cx|zEC>x|z. We have
Cx|zEC>x|z = Λ−1xx(OxΛxx − ΛxxOx)Λ−>xx
= Λ−1xxOx −OxΛ
−1xx .
(4.43)
The first element of these two terms in subtraction are just σ2 and σ2.
4.3.1.2 Estimated Mean
Using the relationship ΛxzOz = OxΛxz, Equation (4.31) is
Λxxˆx = P−1
xxµx − Λxzz
= P−1xxOxµx − ΛxzOzz
= P−1xxOxµx −OxΛxzz.
(4.44)

Chapter 4. When can One Ignore the Correlation? 103
We subtract the above equation from a left-multiplied Equation (4.29) by
Ox
OxΛxxx = OxP−1xxµx −OxΛxzz (4.45)
and we obtain
Λxxˆx = OxΛxxx + P−1
xxOxµx −OxP−1xxµx rearranging the subtraction
= (ΛxxOx + E)x + (P−1xxOx −OxP
−1xx)µx by grouping similar terms
= ΛxxOxx + Ex + (P−1xxOx −OxP
−1xx)µx
ˆx = Oxx + Λ−1xxEx + Λ−1
xx(P−1xxOx −OxP
−1xx)µx.
Taking the first element (row) of the estimated mean, we have
ˆx(i)
= x(i) + Cx(1)|zEµ+ Cx(1)|z(P−1xxOx −OxP
−1xx)µx
= x(i) + Cx(1)|zEx− Cx(1)|zEµx
= x(i) + Cx(1)|zE(x− µx).
(4.46)
We now analyze the the performance of the estimated mean which
includes:
• The mean error of the estimated mean E[ˆx(i) − x
(i)k ], and
• The error covariance of the estimated mean δ2 = E[(ˆx(i) − x
(i)k )2].

Chapter 4. When can One Ignore the Correlation? 104
The mean error of the estimated mean is zero because
E[ˆx(i) − x
(i)k ] = E[x(i) + Cx(1)|zEx− Cx(1)|zEµx − x
(i)k ]
= E[x(i) − x(i)k ] + Cx(1)|zEE[x− µx]
= 0.
(4.47)
The two expectations are zero because the estimation error of the original
full network is zero-mean. The error covariance of the estimated mean is
δ2 = E[(ˆx(i) − x
(i)k )2]
= E[(x(i) + Cx(1)|zEx− Cx(1)|zEµx − x(i)k )2]
= E[(x(i) − x(i)k )2] + E[(Cx(1)|zE(x− µx))2] + 2E[(x(i) − x
(i)k )Cx(1)|zE(x− µx)].
(4.48)
In the above equation, the first term E[(µ − xA,k)2] = σ2, the last term is
zero. The second term
E[(Cx(1)|zE(x− µx))2] = E[Cx(1)|zE(x− µx)(x− µx)>E>C>x(1)|z]
= Cx(1)|zEE[(x− µx)(x− µx)>]E>C>x(1)|z
= Cx(1)|zE(Pxx −Λ−1xx)E>C>x(1)|z.
(4.49)
Therefore, the error covariance of the estimated mean is
δ2 = σ2 + Cx(1)|zE(Pxx −Λ−1xx)E>C>x(1)|z
= δ2 + Cx(1)|zE(Pxx −Λ−1xx)E>C>x(1)|z.
(4.50)

Chapter 4. When can One Ignore the Correlation? 105
It is easy to see that Pxx � Λ−1xx and Cx(1)|zE(Pxx − Λ−1
xx)E>C>x(1)|z ≥ 0.
We have δ2 ≥ δ2 = σ2.
4.3.1.3 Summary of the Relationship
σ2 = σ2 + Cx(1)|zEC>x(1)|z
ˆx(i)
= x(i) + Cx(1)|zE(x− µx)
E[ˆx(i) − x
(i)k ] = 0
E[(ˆx(i) − x
(i)k )2] = δ2 = δ2 + Cx(1)|zE(Pxx −Λ−1
xx)E>C>x(1)|z
(4.51)
By constructing the unwrapped network of naıve filter, we derive the per-
formance of the naıve filter compared with central filter using the summa-
rized equations above. The estimation overconfidence can be explained by
the first relationship. The estimation divergence comes from the second
and fourth equations but it is not easy to visualize. We shall quantify the
divergence region in the next section.
4.3.2 Multi-Vehicle Localization with Bathymetric Aids
The multi-vehicle localization consists of vehicles estimating their own po-
sitions, and cooperating with an additional relative measurement relating
the two vehicles. When bathymetry map is used to assist the localization,
the local measurements consist of water depth measurements, and they

Chapter 4. When can One Ignore the Correlation? 106
are fairly accurate. We look at conditions under which correlation can be
ignored.
We consider the recursive two-step process where two vehicles (Vehicle
i = 1 and j = 2) localize themselves (position states x(1) and x(2)) respec-
tively. Similarly we denote previous time step k and current time step k+1.
At each step, each node makes a local observation (z(1) or z(2)) about their
respective positions. A range measurement r is made between vehicles.
The propagation model in Equation (4.18) is simplified as a random walk
process
x(1)k+1 = x
(1)k + ω
(1)k
x(2)k+1 = x
(2)k + ω
(2)k .
(4.52)
The propagation noises are independent of each other with the same error
covariance Q. The measurements z(1)k , z
(2)k and rk in Equation (4.19) have
error covariance R(1), R(2) and Rr respectively. Without loss of generality,
we assume R(1) ≤ R(2).
Compared with multi-sensor tracking problem, there are two differ-
ences. The first difference lies in an additional variable called ranging r
at each step. It relates the two position variables. The second difference
comes from individual process noise on position of each vehicle. ω1 and ω2
are independent noises.

Chapter 4. When can One Ignore the Correlation? 107
In step k, the estimates at Vehicle i and j are y(1)k and y
(2)k , with the
same error covariance Pk and correlation coefficient ρk. Central KF stacks
the two state variables and the centralized error covariance is therefore Pk ρkPk
ρkPk Pk
. Figure 4.10 and Figure 4.11 show two examples of cen-
tralized processing, with respect to different values of ρk and Rr. The
different settings of the two cases have a common extreme situation: when
the ranging error is 0, the two estimates are fully correlated (and therefore
have the same error covariance) after cooperation. When the ranging error
approaches zero, the two estimates are almost fully correlated with similar
error covariance after cooperation.
We also analyze the performance of SF, NF and DF (with a weighting
factor). A SF at Vehicle 1 has
y(1)k+1 = y
(k)k + (Pk + Q(1))(Pk + Q(1) + R(1))−1(z
(1)k+1 − y
(1)k+1)
P(1)k+1 = (Pk
−1 + R(1)−1)−1.
(4.53)
This is standard KF and Vehicle 2 obtains its estimation in the same way.
NF fuses the estimated position from Vehicle 2 about Vehicle 1 such that
y(1)NF = λNFy
(1)k+1 + (1− λNF)(y
(2)k+1 + rk+1), where the weight λNF = (P
(2)k+1 +
Rr)(P(1)k+1 + P
(2)k+1 + Rr)
−1.
DF fuses the estimated position from Vehicle 2 using a weight λ1 such
that y(1)DF = (1 − λ1)y
(1)k+1 + λ1(y
(2)k+1 + rk+1). At Vehicle 2, the DF fuses

Chapter 4. When can One Ignore the Correlation? 108
(a) Case 1: Correlation coefficient in one-step cooperation.
(b) Case 1: Error covariances of two vehicles in one-step cooperation.
Figure 4.10: Case 1: Pk = 5,Q = 10,R(1) = 1,R(2) = 2. Whenranging error approaches 0, the two estimates are about fully correlated
with similar error covariances after cooperation.

Chapter 4. When can One Ignore the Correlation? 109
(a) Case 2: Correlation coefficient in one-step cooperation.
(b) Case 2: Error covariances of two vehicles in one-step cooperation.
Figure 4.11: Case 2:Pk = 5,Q = 1,R(1) = 10,R(2) = 40. Whenranging error approaches 0, the two estimates are about fully correlated
with similar error covariances after cooperation.

Chapter 4. When can One Ignore the Correlation? 110
the estimated position from Vehicle 1 using a weight λ2 such that y(2)DF =
(1 − λ2)y(2)k+1 + λ2(y
(1)k+1 − rk+1). The error covariances can be calculated
accordingly. The optimal weights can be obtained such that
λ∗1 = arg minE[(y(1)DF − x
(1)k+1)2]
λ∗2 = arg minE[(y(2)DF − x
(2)k+1)2].
(4.54)
When ranging error Rr = 0, we have λ∗1 +λ∗2 = 1 and the two estimates are
fully correlated after cooperation. When the ranging error Rr is very small,
λ∗1 + λ∗2 also approaches 1. In underwater communications, we do have the
ability to achieve very small ranging error, compared with positioning error.
For simplicity, we set Rr = 0 and therefore the correlation coefficient goes
to 1.
4.3.2.1 One-Step Performance
We calculate the one-step dangerous region, similar to the situation in
Equation (4.16), that is
detE[(y(1)NF − xk+1)(y
(f)NF − xk+1)>] > det P
(1)k+1. (4.55)
Firstly, we consider the extreme cases. When Q → 0, the inequality
is the same as Equation (4.17) except that the normalized R(i) = R(i)
Pk.
It has the same region in the two-sensor tracking problem. This is easy

Chapter 4. When can One Ignore the Correlation? 111
to understand as the zero propagation noise makes the two states fully
correlated. In such a case, we can see that the DF has the optimal weight
λ∗DF = R(1)
R(1)+R(2) . The same result can be derived by minimizing the error
covariance in Equation (4.54).
When Q� Pk and R(i) � Q, NF approaches the performance of CF,
because the assumption of independence is almost valid. We can ignore the
correlation.
When the propagation noise is neither too small nor too large, we derive
the dangerous region shown in Figure 4.12 when Equation (4.55) is met.
This region tells us when the local propagation error is small, the states
are more correlated. Vehicle 2 maintains most of the correlated information
when R(2) > R(1). In such a case, if the correlation in the estimate from
Vehicle 2 is ignored, the fused estimate is worse than the estimate from SF.
4.3.2.2 Asymptotic Performance
Figure 4.13 shows the estimation performance in stable state. The cases are
located in Figure 4.14 using their parameter values. The normalized R(i) =
R(i)/Q. In the three cases, cooperative localization with bathymetric aids
is most similar to Case (b) and Case (c). The relative distance measured by
acoustic signals has small error (Rr is in the sub-meters range); the local
measurement, i.e., the water depth has much smaller errors compared with

Chapter 4. When can One Ignore the Correlation? 112
Figure 4.12: One-step Performance: The dangerous region of imple-menting NF in multi-vehicle localization. (R(2) > R(1))
the propagation errors accumulated between cooperation. Even if any one
of the cooperative vehicles has little or none of the bathymetry aids (large
measurement error like Case (c)), it is still safe to ignore the correlation.
4.4 Summary
We demonstrated why there is information loss in distributed localization,
and how the information is double counted if one ignores the correlation.

Chapter 4. When can One Ignore the Correlation? 113
(a) Actual error covariance eventually grows larger than SF.
(b) It is safe to ignore correlation and the performance is closeto CF.
(c) Actual error covariance is smaller than SF but the estimationis overconfident.
Figure 4.13: Naıve filter in stable state: One can ignore the correlationin Case (b) and Case (c) but NF becomes detrimental in Case (a).

Chapter 4. When can One Ignore the Correlation? 114
Case (a)
Case (b)
Case (c)
0 20 40 60 80 100
0
20
40
60
80
100
R-(1)
R-(2)
Figure 4.14: Asymptotic Performance: The dangerous region of im-plementing NF in multi-vehicle localization. The three cases in Fig-
ure 4.13are located in the regions.
For a cooperation method, when the actual localization is worse than
single-vehicle localization, we call it dangerous as this cooperation makes
the estimation worse. When the actual localization is better than single-
vehicle localization, we perceive it safe as this cooperation helps. For both
types of cooperative localization - multi-sensor tracking problem and multi-
vehicle localization problem, we quantified the safe and dangerous regions
when ignoring correlation during fusion. This can be used as a guideline
to justify the naıve assumption. The naıve assumption is justified safe to
use in cooperative localization with bathymetric aids in the next chapter.

Chapter 5
Localization with Bathymetric
Aids
5.1 Problem Statement
Chapter 4 shows that cooperative localization with bathymetric aids can
ignore the correlation when fusing information from range updates. With
this justification, we proceed to explore the bathymetry-aided navigation
on a single vehicle. This can be safely extended to cooperative naviga-
tion of multiple vehicles. The first work investigates how the bathymetric
terrain map benefits the localization. As many works have claimed that
the localization performance highly depends on the bathymetry variation
[35, 37, 47, 62], we justify this assumption through a careful analysis. It
115

Chapter 5. Localization with Bathymetric Aids 116
is again proved that the advantage of bathymetric aids is path dependent.
However the bathymetry variation is not a sufficient condition for a good
localization. A concept of information entropy map, is formulated and used
in Chapter 6 later as an evaluation metric in path planning.
The work in this chapter and Chapter 6 was published in [71].
5.2 Probability Map Based Localization
We denote the entire location space at time k as Xk. Bel(Xk = x) denotes
the vehicle’s belief that it is at the location x at time k. The action ak
denotes the action taken at time step k towards the next step k + 1, and
A1:k.= {a1, a2, ..., ak}. The same definition and notation apply to the
sensing data yk. Markov process assumes that given the present state, the
future and past states are independent. In formal terms, it is stated
P (xk|x0, ...,xk−1, a0, ..., ak−1, zS0, ..., zk, ) = P (xk|xk−1, ak−1). (5.1)
This only works if the environment is static and does not change with
time [83]. Kalman filter described in the previous chapter is one of the
common methods used. However, Kalman filter assumes Gaussian noises
in estimation and measurements. It does not perform well for situations
where the models are nonlinear or the belief is multimodal. For example,

Chapter 5. Localization with Bathymetric Aids 117
a vehicle moving along the ridge of a hill may arrive at a belief that has
two peaks at its two sides. In such situations, filters with non-parametric
representation can give better description.
Two types of localization methods are introduced in the subsequent
sections - grid-based Markove localization and particle filtering. We exam-
ine the effect of bathymetry aids on localization. This includes how the
bathymetry affects the localization belief, which estimation filter should be
used, and how the localization performance should be quantified.
5.2.1 Grid-Based Markov Localization
The grid-based localization uses a histogram to represent the belief distri-
bution in map grids. We use the algorithm in [34] to simulate the grid-based
Markov localization near St John’s Island, Singapore. We assume that we
have no idea where the vehicle is at the beginning, and hence we initialize a
uniform prior distribution in this area. The grid-based Markov localization
has the ability to represent situations where the position of the vehicle is
held by multiple, distinct beliefs. The probability could be any form in-
stead of single Gaussian. It also caters to the situation where the initial
position is unknown.
There are two steps in the Markov localization: action (propagation)
and sensing (observation). The corresponding estimation is to predict and

Chapter 5. Localization with Bathymetric Aids 118
update the belief. The uncertainty in the prediction smooths out the loca-
tion possibility while the observation for update reinforces the places which
have similar water depth (bathymetry) as measured. The resolution of the
surveyed bathymetry restricts the accuracy of positioning. The computa-
tion load is comparable to the grid map resolution and is fairly high. In the
St John’s map, for example, we have an area of 936 meters by 349 meters,
with 1 meter resolution, giving a total of 326664 grids, of which 192956
grids are underwater.
Figure 5.1: Bathymetry map near St. John Island, Singapore. Circles:Path 1 (Speed 2 m/s). Crosses: Path 2 (Speed 1.41m/s).
Figure 5.1 shows two test paths on the bathymetry map. The simu-
lation assumes of odometric error of 1 meter per second in standard devi-
ation, and measurement error of 0.1 meters in standard deviation. There

Chapter 5. Localization with Bathymetric Aids 119
(a) Path 1.
(b) Path 2.
Figure 5.2: Grid-based Markov localization with measurement up-dates. Yellow crosses: top 5 possible locations. Cyan circles: true path.
Green square: estimated locations with top possibility.

Chapter 5. Localization with Bathymetric Aids 120
(a) Path 1. (b) Path 2.
Figure 5.3: Depth measurements along two paths.
is a measurement every other 15 seconds. Both start with uniform be-
liefs on the vehicle location over the map. The decision of the position
by the top beliefs at initial few measurements is mostly incorrect as there
could be many locations with similar top probability. Multiple hypotheses
on the location appears. With more bathymetry measurements (from left
to right in Figure 5.2), the probability is updated from multiple peaks or
ridges to eventually a single peak. The decision on the estimated position
converges. However Path 2 localization converges from the second depth
measurement onward, whereas Path 1 localization only converges at the 4th
measurement. In terms of bathymetry variations along the path, Path 1
has more variations as shown in Figure 5.3. The underwater topology varia-
tions (richness of features) on the path are closely related to the positioning
performance. The sparser the underwater topology, the less effective are
bathymetry aids to localization. However bathymetry variation is not the
sufficient or necessary condition for a good localization. The uniqueness

Chapter 5. Localization with Bathymetric Aids 121
of the measured depth compared with the bathymetry in the prior belief
decides the localization performance. Multiple AUVs with cooperation are
able to extract more uniqueness in the feature space.
5.2.2 Particle Filtering and Multiple Hypotheses
At time step k the particle filter gives the particle set
{x(i)k , q
(i)k } (5.2)
where q(i)k is the weight for particle i at position x
(i)k and
∑Ni=1 q
(i)k = 1.
The computation of PF is determined by the number of particles used.
Figure 5.4 shows the corresponding PF estimation on Path 1. The density
of the particles cannot be seen due to the overlapping of the particles.
However it gives similar result as Figure 5.2(a) with less computation load
(5000 particles).
We model the particles with Gaussian mixture model (GMM) using
Expectation Maximization (EM) method [16]. Classifying the particles is
essentially a clustering problem. A Gaussian Mixture consists of a linear
superposition of Gaussians
p(x) =K∑i=1
λiN (x|µi,Σi) (5.3)

Chapter 5. Localization with Bathymetric Aids 122
Figure 5.4: Particle filter localization with measurement updates forPath 1. Black circles: true path. Cyan regions: distribution of particles.
where∑K
i=1 λi = 1 are the mixing coefficients and K is the number of
Gaussians. EM is a recursive method to maximize the likelihood function
with respect to the parameters comprising the means and covariances of the
Gaussians and the mixing coefficients. Considering the mixing coefficients
as prior probabilities for the particles, for a given value ‘x’, we evaluate the
corresponding posterior probabilities, also called responsibilities :
γi(x) = p(i|x)
=p(i)p(x|i)p(x)
=λiN (x|µi,Σi)∑Kj=1 λjN (x|µj,Σj)
.
(5.4)
When Ni particles are assigned to the ithe particles, we have λi = Ni
N.
In each iteration, γi(x) is evaluated and the parameters are re-estimated.
With the new estimated parameters, the log likelihood ln p(x|µ,Σ, λ) can

Chapter 5. Localization with Bathymetric Aids 123
be evaluated. The iteration stops when there is convergence or maximum
number of iterations is reached.
(a) Step 45.
(b) Step 60.
Figure 5.5: Gaussian mixture model estimated by EM method.
Figure 5.5 shows two examples of the Gaussian mixtures estimated by

Chapter 5. Localization with Bathymetric Aids 124
EM method. Each cluster is plotted in different colors, with the mean in
black square and error covariance in black ellipses. When particles form
multiple clusters, GMM is more representative. When particles form fewer
clusters, the number of particles affects the calculation and estimation per-
formance.
Generally, the Gaussian mixture model for multiple hypothesis increases
the computation in modeling. The individual Gaussian model is also not
very representative. Overally prediction and update with multiple Gaus-
sian does not give much advantage compared with particle filter itself.
5.3 Information Entropy Map
In the previous section, we have demonstrated that with bathymetric mea-
surements incorporated into localization, the a posteriori description of the
location uncertainty is often poorly described by a Gaussian distribution.
Multimodal distributions may arise when the location uncertainty is bifur-
cated at bathymetric ridges. Particle filter (PF) is used as a flexible tool
to represent general densities. However, the traditional evaluation mea-
sures such as error of estimated mean and estimated error covariance are
only suitable for single Gaussian-distribution cases [26]. Gaussian mixture
model has the problem with varying optimal number of Gaussians.

Chapter 5. Localization with Bathymetric Aids 125
We adopt information entropy measure to characterize the estimation
uncertainty, which does not require parametric estimation of the position.
This section introduces two types of information entropy measures for fil-
tering uncertainty - the grid-based discrete entropy and PF-based entropy.
Both display similar trends in describing the estimation uncertainty. We
will illustrate the entropy values along different paths.
5.3.1 Grid-based Discrete Entropy
From a mathematical perspective, the calculation of entropy is based on the
probability of all possible outcomes. However for particle filter localization,
simply counting the probability (weights) of particles for discrete entropy
will result in loss of location and dispersion information. Particles have to
be related to geographical location. One way is to count the number of
particles in the map grids. We calculate the discrete entropy of the vehicle
position estimation
H(X) = −MN∑i=1
P (xi) logP (xi) (5.5)
whereM andN are the number of grids in longitude and latitude directions,
i is the index of grid up from 1 to MN . P (xi) is the probability mass
function at ith grid centered at position xi and∑MN
i P (xi) = 1. P (xi) is

Chapter 5. Localization with Bathymetric Aids 126
obtained by summing the weights of particles which fall into the ith grid.
In the case of P (xi) = 0 for some i, the value of 0 log 0 is defined to be 0.
The entropy value defines the uncertainty (or uniqueness in the other
way) of the localization on a grid map. When there are a few grids with
high probability while the rest of the grids have low probability, the entropy
value is small. Therefore the filter has less uncertainty about vehicle’s
location because the vehicle most likely falls into one of the few grids with
high probability. If most grids have equal probability, the filter is more
uncertain where the vehicle is located.
The next information for localization comes from the observed water
depth. As mentioned before, this is in fact a sum of two measurements -
the vehicle depth (the depth from the sea surface to the vehicle) and the
altitude (the depth from vehicle to sea bottom). The single-point water
depth measurement z is assumed to be corrupted with zero-mean Gaussian
noise zk = hk(xx) +νk and νk ∼ N (0,R). Comparing with the bathymetry
map in records, the localization can be refined.
Let the water depth variable be Z. With all the bathymetry map
readings, we can find P (Z|X) for all possible values (z,x), and subsequently
we obtain P (z) =∑
x P (z|x). According to Bayes Theorem, we have
P (x|z) =P (z|x)P (x)
P (z)(5.6)

Chapter 5. Localization with Bathymetric Aids 127
and therefore the conditional entropy is
H(X|Z) =∑zi
p(zi)H(X|Z = zi). (5.7)
The conditional entropy H(X|Z) tells on average how much localization
uncertainly is left after observing the water depth within an area. The
reduced amount is the mutual information I(X; Z) provided by prior about
the location X and bathymetry information Z. We can also calculate the
conditional entropy when a single measurement is made, that is H(X|Z =
z).
It should be noted that the accuracy of discrete entropy depends on
the size of the map grid (map resolution). An extreme example is when
all particles fall into one grid in the map, the discrete entropy falls to a
minimum value - zero. Meanwhile, number of particles in the filter is also
critical to the accuracy of discrete entropy. To avoid the discretization error
from particle filter, bivariate kernel density [19] is first used to estimate the
distribution. Then the discrete distribution is interpolated and normalized
on the map grids.

Chapter 5. Localization with Bathymetric Aids 128
5.3.2 Particle Filter Based Entropy
For dynamic model and measurement model described in Equations (2.1) and (2.2),
the entropy in a running particle filter has been derived in [17] as
H (p(xk|Z1:k))) ≈ log
(N∑i=1
p(zk|xik)qik−1
)
−N∑i=1
log
(p(zk|xik)(
N∑j=1
p(xik|xjk−1)qjk−1)
)qik,
(5.8)
where Z1:k = {z1, z2, . . . , zk} includes the measurements in history up
to time step k. p(xk|Zk) is the posterior distribution after the series of
bathymetry measurements.
As measurements may not be available at every step, we derive the
entropy in predicting vehicle position from time step k − 1 to k. xik|k−1
denotes the predicted position of the ith particle in particle set. qik|k−1 is
the associated particle weight. The probability distribution at the predicted
stage represented by PF is
p(xk|Z1:k−1) ≈N∑i=1
qik|k−1δ(x− xik|k−1). (5.9)
The weak convergence law for PF states that
limN→∞
N∑i=1
g(xik|k−1)qik|k−1 =
∫Xg(xk)p(xk|Z1:k−1)dxk. (5.10)

Chapter 5. Localization with Bathymetric Aids 129
Therefore the entropy is
H (p(xk|Z1:k−1)) = −∫X
log p(xk|Z1:k−1)p(xk|Z1:k−1)dxk
= − limN→∞
N∑i=1
log p(xik|k−1|Z1:k−1)qik|k−1
= − limN→∞
N∑i=1
log
(limN→∞
N∑j=1
p(xik|k−1|xjk−1)qjk−1
)qik|k−1
≈ −N∑i=1
log
(N∑j=1
p(xik|k−1|xjk−1)qjk−1
)qik|k−1.
(5.11)
It can be seen that this is equivalent to the PF-entropy approximation in
Equation (5.8) when p(zk|xik) = 1. It is equivalent to an observation which
provides no information updating the distribution.
5.3.3 Empirical Convergence and Contributing Fac-
tors
A simple random walk process is used to illustrate the grid-based entropy
and PF-based entropy. The measurement is observed position with addi-
tive Gaussian noise. A standard Kalman filter tracks the estimated co-
variance and therefore the theoretical entropy of the Gaussian distribution
H = 12
log{(2πe) det Σ} is calculated as benchmark. Figure 5.6 shows the
standard deviation error with two different initial errors.

Chapter 5. Localization with Bathymetric Aids 130
Figure 5.6: Gaussian random walk process: Estimation error is re-duced at every measurement update.
Figure 5.7 shows PF-based entropy is almost identical to the theoret-
ical entropy, except when number of particle is only 1000 (Figure 5.7(a)
and 5.7(b)). Grid-based discrete entropy has different values but the same
trend as the estimation error. Both entropy values drop with the estima-
tion error reduction from measurement update. Resampling of particles
does not affect PF-based entropy. This is because PF-based entropy is
calculated based on the transition and weight update of each particle and
resampling happens after that if needed. Resampling of particles affect the
performance of Grid-based discrete entropy. This is because resampling is
necessary as the first step for the kernel density estimation for the discrete
entropy.
The advantage of grid-based discrete entropy is that it can be used to
calculate the average conditional entropy H(X|Z). H(X|Z) can be used
to describe the effectiveness of a bathymetry map based on a particular
prior knowledge. The drawback is that the accuracy depends on the grid
size as the bin weights are obtained by including particles which fall into

Chapter 5. Localization with Bathymetric Aids 131
(a) (b)
(c) (d)
(e) (f)
Figure 5.7: Gaussian random walk process: PF-based Entropy andgrid-based discrete entropy, versus theoretical entropy. Vertical red lines:time steps when measurements are available. Vertical green dashed lines:time steps when particles are resampled. Grid-based entropy is more
sensitive to particle numbers and estimation error values.
the same grid. Under-estimation of entropy occurs when either the prior
or number of particle is small. For example, with the same initial error,

Chapter 5. Localization with Bathymetric Aids 132
grid-based discrete entropy values are different with different number of
particles (comparing each column of Figure 5.7). This is because a smaller
number of particles is insufficient to fully describe larger estimation error.
In the other hand, PF-based entropy only calculates the conditional entropy
H(X|Z = z) with a specific observation but it is generally more stable with
respect to particle numbers and prior knowledge. It is an approximation of
the entropy of probability density function (PDF) using probability mass
function (PMF). For PF-based entropy, the variation is only more obvious
when the estimation error is larger and number of particles is relatively
small (Figure 5.7(a) and 5.7(b)).
An example of the effect of particle number with bathymetry observa-
tions is shown in Figure 5.8. With particle numbers varying from 500 to
11000, the grid-based discrete entropy has larger variation of the median
value in red line than the PF-based entropy. It also gives more outliers.
This means grid-based entropy is more sensitive to the particle numbers.
5.3.4 Localization Performance
With the comparison from previous section, we use PF-based entropy as the
localization uncertainty measure. We examine the PF-based entropy along
two paths shown in Figure 5.9(a). Both paths have the same large initial

Chapter 5. Localization with Bathymetric Aids 133
(a) A non-Gaussian distribution after observation(Particle Numbers = 11000): particle distributionhighly depends on the bathymetry map.
(b) Entropy Boxplot: PF-based entropy versus grid-based entropy in the same range. Grid-based entropy has larger variation in the median of the entropy values.
Figure 5.8: PF-based entropy versus grid-based discrete entropy:Grid-based discrete entropy varies more, with respect to particle num-
ber.

Chapter 5. Localization with Bathymetric Aids 134
(a) Two different paths (A and B) from the same starting point (SP) tothe destination point (DP).
(b) Entropy of the particle filter for paths A and B shown in (a).
Figure 5.9: The entropy of the particles in a bathymetric navigationparticle filter depends on the path taken from source to destination.

Chapter 5. Localization with Bathymetric Aids 135
uncertainty. Bathymetric measurements made at every 10 seconds help re-
duce the localization uncertainty initially for both paths. Straight-line path
A goes through a flat area with little bathymetry variation. The entropy of
localization uncertainty increases from roughly the 200th second. Path B
takes a detour and therefore longer time to reach the destination. Without
bathymetric information, the vehicle would incur a larger uncertainty for
longer missions due to error accumulation in pure dead reckoning. With
bathymetric information, the PF-based entropy decreases rapidly as the
vehicle moves along the area with significant bathymetric variability. The
significant variation along path B makes the measured bathymetry unique
and therefore improves localization accuracy. At the destination, Path B
has a smaller entropy compared with Path A.
In Figure 5.10(b), the root-mean-squared errors along Path A and B
over 50 runs are plotted. As the mission time for each run is different,
time is scaled to the percentage of the total mission time. The localization
error has the same trend of the PF-entropy in Figure 5.9(b). Figure 5.10(a)
shows the localization error when the vehicle reaches the destination.
With this example, we have shown that the localization performance
can be evaluated using information entropy measure. We also show that
paths with different bathymetry give different localization results.

Chapter 5. Localization with Bathymetric Aids 136
(a) When vehicle reaches the destination, the localization error and thecovariance are much larger for Path A than that for Path B.
(b) Localization error along Path A is also larger than that along Path B.
Figure 5.10: Although Path B takes a detour and therefore longertime to reach the destination, the localization error of Path B is much
smaller than a that of a straight line by Path A.

Chapter 5. Localization with Bathymetric Aids 137
5.3.5 Information Entropy Map Based on Different
Priors
The intuitive way is to select the path with the most bathymetry variability
in the map. However, is bathymetry variability the sufficient condition for
optimal localization? we answer this question in this section by examining
the information entropy map.
Discrete conditional entropy is first used to evaluate the effect of the
information that the local bathymetry provides. Given a prior distribution,
the conditional entropy H(X|Z) and mutual information I(X; Z) of three
areas are calculated. Among the three areas in Figure 5.11(a), Square
3 has the smallest bathymetry variation. With uniform prior, Square 3
shows the smallest mutual information and largest conditional entropy. In
the other hand, Square 1 has the smallest conditional entropy. On average,
bathymetry measurements help improve the localization accuracy most for
Square 1.
If the prior is Gaussian-distributed and centered at top left (Figure 5.11(b)),
Square 2 outperforms Square 1 as the bathymetry variation at the top left
is larger for Square 2. Mutual information between the prior and mea-
surement is therefore the most in Square 2 compared with Square 1 and
3. When Gaussian prior is centered at bottom left, Square 2 gives smallest
mutual information as the bottom left topology is almost flat.

Chapter 5. Localization with Bathymetric Aids 138
(a) Conditional entropy of three different areas with uniform prior.
(b) Conditional entropy with different Gaussian priors.
Figure 5.11: Information entropy map for different areas: Differentprior distributions yield different conditional entropy values.

Chapter 5. Localization with Bathymetric Aids 139
The examples with different priors show that the effect of bathymetric
aids also depends on the priors - how localization information is known
before measurements. To be specific, the effect of bathymetric aids depends
on how the bathymetry matching helps in improving the prior knowledge of
localization. Figure 5.12) shows the conditional entropy maps with different
Gaussian priors (plots on the right for each row). For a Gaussian prior,
it is good to have more bathymetry variation in the direction of larger
uncertainty. For example in the first row of Figure 5.12, Gaussian prior has
more uncertainty in the north-south direction, and therefore bathymetry
valleys in east west direction give smaller entropy value. A simple extreme
case is when an AUV goes along a straight bathymetry valley (V-shape).
The lowest point along the path has the same water depth. The valley is
steep and therefore the bathymetry variation at the vehicle’s left and right
sides is high; the high variation bounds the localization error at the two
sides. However, the measured water depth along the path does not change
(zero variation), and the localization uncertainty in heading directions keeps
increasing as every point along the path has the same bathymetry topology
around it.

Chapter 5. Localization with Bathymetric Aids 140
Figure 5.12: Information entropy map based on different Gaussianpriors: It is good to have more bathymetry variation in the direction
where the larger uncertainty of the Gaussian prior lies.
5.4 Summary
We described the localization with bathymetric aids. Nonparametric fil-
ters show that localization distribution with bathymetry measurements is
neither Gaussian nor uniform. In terms of computational load, accuracy,
empirical convergence and sensitivity to various factors, Particle filter (PF)

Chapter 5. Localization with Bathymetric Aids 141
turns to be the best: it handles multimodal ambiguities, and is not com-
putationally heavy as long as the number of particles is large enough for
description of the localization.
Based on particle filters, we formulated PF-based entropy - an infor-
mation theoretical approach to quantify the localization uncertainty. We
built information entropy map to analyze how bathymetry maps benefit
localization.

Chapter 6
Navigation with Bathymetric
Aids
6.1 Problem Formulation
Chapter 5 has shown with examples, that the localization accuracy strongly
depends on the path that an AUV takes, if the AUV uses bathymetric aids
for navigation. So how does one select a path that yields good localization?
Given a starting point and a destination, we define our problem as how to
plan a path such that the localization uncertainty is minimized when vehicle
reaches the destination.
The optimal path is found using approximate dynamic programming
(ADP) introduced in Section 6.2. The Q-function of the ADP is obtained
142

Chapter 6. Navigation with Bathymetric Aids 143
by a cycle of reinforcement learning in Section 6.3. The state value of the
ADP is obtained by Gaussian process regression (GPR) in Section 6.4. The
paths generated are evaluated in Section 6.5. Summary is made in the last.
The work in this chapter and Chapter 5 was published in [71].
6.2 Approximate Dynamic Programming
Rather than appeal to heuristics (bathymetry variation, terrain dispersion,
roughness, etc.), we pose the path planning as an optimization problem and
solve it by breaking the problem down into a collection of simpler subprob-
lems. This is the concept of dynamic programming. Due to the problem
of continuous state domain and “curse of dimensionality”, we approximate
the state value and optimize the path in the framework of reinforcement
learning and Gaussian progress regression.
We define the state S as the positions of particles in a particle fil-
ter, that is, Sk = {xik, qik}. For simplicity, particles are resampled to
have the same weights. Therefore the state space consists of the posi-
tions of all particles. Given a starting point and a destination, the path
is planned with policy π(Sk)The policy which contains a series of actions
π(Sk) = ak, ak+1, ak+2, . . .. The policy is chosen such that the localiza-
tion uncertainty is minimized when vehicle reaches the destination. It is

Chapter 6. Navigation with Bathymetric Aids 144
formulated as,
π(Sk)← arg mina∈A(Sk)
Q(Sk, ak)
Q(Sk, ak) =∑Sk+1
ptr(Skak−→ Sk+1)V (Sk+1)
V (Sk) = minak∈A(Sk)
Q(Sk, ak)
(6.1)
where V (·) is the value function of a state. ptr(Skak−→ Sk+1) is the transition
probability from state Sk to state Sk+1, due to the non-deterministic evo-
lution of vehicle position by taking action ak. This planning formulation
is essentially an optimization problem. Compared to standard Bellman’s
equation [65], the transition reward is zero and the discount factor is 1.
Therefore, the value of any given state S is the entropy value of state at
the destination. In other words, given an optimal path, all states along the
same path have the same entropy value.
In the subsequent sections, transition probability ptr(Skak−→ Sk+1) is
set to 1 during path planning. This is because the performance evaluation
of the algorithm is run over Monte Carlo simulations to include the non-
deterministic evolution of vehicle position.
Equation (6.1) suffers from “the curse of dimensionality”. The state
space depends on the number of particles and the action is in a contin-
uous domain. It is not possible to use dynamic programming to solve
the sequential decision process problem. We resort to the techniques of

Chapter 6. Navigation with Bathymetric Aids 145
approximate dynamic programming (ADP) in [65] and solve the optimiza-
tion problem using reinforcement learning and Gaussian process regression
(GPR). Q-function [79] Q(·) across all possible actions is obtained by a
cycle of reinforcement learning - policy generation and evaluation.
6.3 Iterative Path Planning Algorithm
Figure 6.1: Flowchart of iterative path planning algorithm.
Figure 6.1 shows the flowchart of the iterative path planning algorithm.
Each iteration consists of two major steps - policy generation and policy
evaluation. Every time a path is generated, localization along the path is
simulated to enforce the learning of the path values.

Chapter 6. Navigation with Bathymetric Aids 146
The algorithm starts with randomly generated paths, given the starting
point and destination. The localization along the paths is simulated to
get the estimated values V ∗(S). A state-value table is constructed with
each entry recording a state S and corresponding value V ∗(S). In each
iteration, the policy is generated according to the estimated state value
from the table. At the end of each iteration, a path is generated and is then
evaluated from simulation. New state-value entries are used to update the
state-value table. The state-value table is refined over iterations.
6.3.1 Policy Generation
Given any state Sk, we approximate the continuous space using a discrete
system. We form an action space A(ak) containing all possible actions.
The possible actions are the headings linearly spaced within (−π4, π
4) when
vehicle heads towards the destination (Figure 6.2(a)). To cover all the
bathymetry grids, the resulting positions after τ = 100 time steps need to
be roughly 10 meters apart from each other. Therefore, there are approxi-
mately 29 actions in the action space.
A resulting state is generated for each action such that (Sk, ak) →
Sk+1 (Figure 6.2(b)). The state value V (Sk+1) is estimated using Gaussian
process regression (GPR) [66]. We will explain the detailed GPR in the
next section. The policy is updated with the action that leads to the next

Chapter 6. Navigation with Bathymetric Aids 147
(a) Given any state Sk, an action space is generated.
(b) A zoom-in plot of the action space and resulting state.
Figure 6.2: Action space for policy generation: The next waypointsfrom action set include all possible map grids when looking at the des-
tination.

Chapter 6. Navigation with Bathymetric Aids 148
state with minimum value. If the current position is within τ -step moves
to the destination, we navigate the vehicle to the destination and the path
planning is completed.
6.3.2 Policy Evaluation
After the path is generated, we evaluate the path by simulating the localiza-
tion along the planned path. The navigation follows waypoints generated
along the path at τ time steps apart. To follow the waypoints, the vehicle
compares its estimated position with the targeted waypoint, and generates
control and command accordingly. The details of path execution are pre-
sented in Section 6.5. The states along the path have the same value as the
state when vehicle reaches the destination. The path is evaluated at the me-
dian value over Monte Carlo simulations. This minimizes the discretization
error due to the limited number of particles. The new state-value entries
are added to the state-value table if their values are smaller than the values
of the nearby states. We also remove the nearby states with large values.
Instead of conventional Euclidean distance, the distance between state is
evaluated using Bhattacharyya Coefficient [27] and is explained in details
in Section 6.4.

Chapter 6. Navigation with Bathymetric Aids 149
6.3.3 The Policy Iteration Algorithm
The algorithm is summarized below:
Algorithm 1 Policy iteration
Randomly generate a number of paths (e.g. 500) and construct the state-value tablerepeat
Start from starting pointwhile The destination is not reached do
Generate action spacefor each action in the action space do
Estimate the value based on state-value tableendChoose the action with the minimum value and move
endRe-evaluate the value of the generated pathUpdate the state-value table
until Stabilized ;
It should be noted that this path planning algorithm plans path offline
to generate the state-value table. When AUV executes the path, a new
planned path can be generated if AUV detects itself away from the planned
path or carrying a new state in the localization filter. The refined state-
value table is used to generate the path. However, if the state or estimated
position is far away from the ones recorded in the state-value table, the
iterative path planning has to start over to optimize the state-value table.

Chapter 6. Navigation with Bathymetric Aids 150
6.4 Gaussian Process Regression for Path
Planning
In the section of policy generation, the value function V (S) (the time step
subscript is dropped for simplicity of notation) of a state S is modeled
as a Gaussian process. The reason is that we only have limited number
of available data (the state-value table) to estimate the continuous value
in the high-dimensional state space (The state is in dimension of 2× 6000
where 6000 is the number of the particles). Therefore we perceive the states
with jointly Gaussian distribution, and infer the state value in a continuous
space with a Gaussian process prior.
To estimate V (S), we choose some nearby states with smaller values.
For example, we only use the nearby states whose values are below the 75th
percentile. This is because we know that the available value of the states in
the state-value table is larger than the optimal value as the paths are not
optimal. We purposely remove some state-value entries as it is obviously not
the optimal one. Let the chosen states and their values be D = {(Ti, vT,i)}.
The value function V (·) can be inferred using Bayes Theorem:
p(V (·)|D) =p(V (·))p(D|V (·))
p(D). (6.2)

Chapter 6. Navigation with Bathymetric Aids 151
The values are observations on the value function V (T ), which is a Gaussian
process (GP). We have
vT,i = V (Ti) + εi
V ∼ GP(·|0,K)
εi ∼ (N)(·|0, σ2).
(6.3)
K is kernel function defined by the covariance of the states. The prior on
V (·) is a GP and likelihood is Gaussian. Therefore the posterior on V (·) is
also a GP. We can make predictions on new state S
p(vS|S,D) =
∫p(vS|S, V (·),D)p(V (·)|D)dV (·). (6.4)
Figure 6.3 illustrates GPR state estimation in an 1-dimensional exam-
ple. The value is to be estimated at the location indicated by the vertical
blue line. The red dash-dot line is the optimal value to be estimated. Ini-
tialization generates paths with state values larger than value of the optimal
path. Therefore, nearby states with smaller values are used to estimate the
state value. The state value is estimated as shown by the blue curve.
The distance between states in the illustration (Figure 6.3) is simply
the distance in the x-axis. In our path planning problem, the state variable
consists of positions of all particles. The state space is much larger. We
cannot simply use a Euclidean distance to measure the similarity between
states. To evaluate the distance between states S and T , the Bhattacharyya

Chapter 6. Navigation with Bathymetric Aids 152
Figure 6.3: Illustration of Gaussian process regression in 1-dimensionalspace.
Coefficient ρ(S, T ) [27] is used. Bhattacharyya Coefficient ρ(S, T ) measures
the level of overlapping between two distributions and therefore is suitable
to describe the similarity of the states (sets of particles). Let the discrete
densities of particle sets S and T be {su}u=1,...m and {tu}u=1,...m respectively,
where m is the number of bins and∑m
u=1 su = 1,∑m
t=1 su = 1. We have
ρ(S, T ) =∑m
u=1
√sutu. The distance B(S, T ) between state S and state T
is
B(S, T ) =√
1− ρ(S, T ). (6.5)

Chapter 6. Navigation with Bathymetric Aids 153
6.5 Simulation and Performance
6.5.1 Underwater Vehicle Navigation
Navigation is the activity of ascertaining one’s position, planning and fol-
lowing a route. To evaluate how the path planning benefits localization,
the vehicle needs to follow the planned path. A series of waypoints are sam-
pled from the planned path, with the destination as the last waypoint. The
vehicle compares its estimated position xk with the targeted waypoint, and
gives an action that directs the vehicle to head towards the targeted way-
point. We set a 10-meter range to determine whether vehicle has reached
the waypoint. Once xk is within 10 meters of the waypoint, the vehicle
changes to target the subsequent waypoint. If the vehicle reaches a later
waypoint before the current one, it continues to follow the next waypoint.
The mission ends when vehicle reaches the destination (within a 10-meter
range) or the mission exceeds the maximum allowable duration.
Our bathymetry map has a resolution of 10 meters. The vehicle makes
a measurement at every 10 seconds when moving at 1 meter per second.
6.5.2 Mission 1
We tested our algorithm on bathymetry data collected at a test location
in Singapore waters. With the starting point (SP) and destination point

Chapter 6. Navigation with Bathymetric Aids 154
(a) Iteration 1
(b) Iteration 2
(c) Iteration 3
Figure 6.4: Mission 1: As the algorithm iterates, the planned pathevolves to one with more bathymetric variation.

Chapter 6. Navigation with Bathymetric Aids 155
(a) PF-based entropy at the destination: the value drops with iterations, andis also smaller than the entropy of a straight-line path.
(b) Estimation error at the destination: the localization error drops with itera-tion, and is smaller than the error of a straight-line path.
Figure 6.5: Mission 1: Performance at the destination.
(DP) being defined, Figure 6.4 shows that as the algorithm iterates, the
planned path evolves to one with more bathymetric variation.

Chapter 6. Navigation with Bathymetric Aids 156
The navigation accuracy is estimated with 50 simulated runs. The en-
tropy at the destination (Figure 6.5(a)) drops with iterations, and is smaller
compared with the entropy at the end of a straight-line path. The localiza-
tion errors at the destination are shown in Figure 6.5(b) for straight-line
path and generated paths over iterations 1 to 3. With the same propaga-
tion and observation capability, routes through more bathymetric variation
have better localization accuracy. A good path is generated within a few
iterations.
6.5.3 Mission 2
We test another pair of starting and destination points. In contrast to
the pair in Mission 1, this pair has a small bathymetric basin (dark blue
region) between them. In the first three iterations in Figure 6.6, paths
are generated along the southwest side of the basin. From the fourth it-
eration, the generated path starts to move to the other side of the basin,
and comes back to the southwest side. The PF-based entropy values and
localization errors at the destination drop over iterations and have similar
trend (Figure 6.7). Looking at the bathymetry along the planned path in
Figure 6.8, we can see that paths from later iterations do have larger range
in bathymetry along their paths. However Path 4 with largest bathymetry
range does not give smallest localization error.

Chapter 6. Navigation with Bathymetric Aids 157
(a) Iteration 1 (b) Iteration 2
(c) Iteration 3 (d) Iteration 4
(e) Iteration 5 (f) Iteration 6
Figure 6.6: Mission 2: In the first three iterations, planned pathevolves to one side of the bathymetry basin. From the fourth iteration,
the planned path evolves to the other side of the basin.

Chapter 6. Navigation with Bathymetric Aids 158
(a) PF-based entropy at the destination: The paths following the basin edgewith more bathymetric variation do not yield smallest entropy values. Entropyvalues drops over iterations.
(b) Estimation error at the destination: The localization errors drops over iter-ations. However the bathymetric variations along paths over iterations do notincrease.
Figure 6.7: Mission 2: Performance at the destination.

Chapter 6. Navigation with Bathymetric Aids 159
Figure 6.8: Illustration of Gaussian process regression in 1-dimensionalspace.
6.6 Summary
With the particle filter based entropy and the information entropy intro-
duced in Chapter 5, we presented a path planning algorithm. Given a start-
ing point and destination, the algorithm generates a sub-optimal path of-
fline, such that the localization accuracy is maximized when vehicle reaches
the destination. We showed that the entropy measure is consistent with the
localization performance. It is important to highlight that there are many
definitions on the bathymetry variation. It can be the change of bathymetry
(single-point water depth) along the path, or the bathymetry range within
the path (difference between maximum and minimum water depth). It can

Chapter 6. Navigation with Bathymetric Aids 160
also be the local bathymetry variation (over some area) along the path. The
last definition needs to define an area size to compute the variation. For
any of the definitions, paths along maximum bathymetric variation may
not always lead to the smallest positioning error. The bathymetry match-
ing performance depends on the prior knowledge about the location and
the exact bathymetry, specifically, how unique the measured bathymetry is
compared with the others in the prior. The conditional entropy measure
evaluates this performance and shows consistent trend with the localiza-
tion performance. Path planning with the information entropy measure
could be extended to other planning problem and eventually cooperative
localization of small team of AUVs.

Chapter 7
Conclusions and Future Work
A list of contributions in this thesis is summarized as:
• We focus on a cooperating team of small-sized, low-cost, sensor-
limited AUVs. We showed that the cooperation improves localization
but also easily aggravates the performance when communication loss
is higher.
• We proposed a new cooperative multi-vehicle localization algorithm
using distributed extended information filter (DEIF). It is effective
in recording the correlated information in light of constrained un-
derwater communication. Simulations show that DEIF gives better
performance compared with single-vehicle localization and existing
cooperative localization method.
161

Chapter 7. Conclusions and Future Work 162
• As naıve filter is easy to implement in complex situation, we answer
the question as to when it is safe or detrimental to ignore the corre-
lation in cooperation.
• We formalize the concept of information entropy measure, to quantify
the localization performance, and the effectiveness of bathymetry on
localization. We concluded that the uniqueness of the measured depth
compared with the bathymetry in the localization prior decides the
localization performance.
• With the conclusion above, we proposed a path planning algorithm
for navigation with bathymetric aids. The algorithm generates near-
optimal paths based on bathymetry map, with good localization ac-
curacy at the destination.
In cooperative localization of underwater vehicles, one cannot assume
that the inter-vehicle correlations are available. This is because the con-
strained underwater communications prevent vehicles from keeping track
of all the estimates shared in the team. It may hamper the cooperation as
the fused information might be false or overconfident when correlation is
underestimated. We examined the problem and proposed a novel design of
the distributed localization method. The method is able to record the cor-
related information from the most recent cooperation and transmit with

Chapter 7. Conclusions and Future Work 163
small packets, providing consistent position estimates in event of packet
loss.
However, ignoring correlation when fusing data seems working in some
work. This dissertation studied the conditions and provided the justifica-
tion where the correlation can be ignored. For multi-sensor tracking prob-
lem, the condition is when the local measurements have relatively small
errors such that the local estimates are nearly independent of each other.
For cooperative localization problem, besides having small local measure-
ment errors which validates the assumption of independence, the other
condition is where the local propagation is long enough such that the local
estimates are nearly independent.
With the assurance of the small local measurement errors, cooperative
localization with bathymetric aids can simply ignore the correlation. We
explored the bathymetry-aided localization and navigation of a single ve-
hicle. This can be extended to cooperative vehicles without the concerns
of tracking inter-vehicle correlation. The effectiveness of bathymetry aids
on localization is shown with an information entropy measure. It showed
that the localization improvement depends on how unique the bathymetry
map against a prior knowledge about the localization. With this idea, a
path planning algorithm is developed for a particle filtering localization.
Simulations show that the algorithm generates sub-optimal paths within a
few iterations.

Chapter 7. Conclusions and Future Work 164
This research is open in applicability to other areas related to cooper-
ative positioning and navigation. For example, terrestrial swarm robotics
on land is one very popular topic where this research can be of relevance.
Mobile and distributed sensor networks have the potential to revolutionize
the way in which information is collected, fused and disseminated. It is
closely related to distributed data fusion network [42], which attracts inter-
est in many areas with its advantage of scalability, modularity and graceful
degradation of performance in case of failures.
There are a number of avenues for future work. Firstly, the path plan-
ning with information entropy measure should be used with different prob-
lem set up. A good localization along the path is also important in survey-
ing and environment sensing. Secondly, there is opportunity to extend the
planning by introducing the presence of peer vehicles. For example, the
goal can be changed to optimize the localization performance of the whole
team or a particular vehicle, or to maximize the communication quality
for information exchange. There could be some spatial correlation in the
measurements among the team, for example, due to the tidy changes. The
cooperative AUVs can be used for bathymetry map building. With knowl-
edge on partial bathymetry map, the paths can be planned adaptively, and
a fuller map can be developed from there.

Bibliography
[1] M. Ahmed and G. Pottie, Fusion in the Context of Information The-
ory, S. S. Iyengar and R. R. Brooks, Eds. CRC Press, 2004.
[2] A. Alcocer, P. Oliveira, and A. Pascoal, “Underwater acoustic posi-
tioning systems based on buoys with gps,” in Proceedings of the Eighth
European Conference on Underwater Acoustics, vol. 8, 2006, pp. 1–8.
[3] J. C. Alleyne, “Position estimation from range only measurements,”
Master’s thesis, Naval Postgrad. Schl., Monterey, CA, USA, Sep. 2000.
[4] D. Alspach and H. Sorenson, “Nonlinear bayesian estimation using
gaussian sum approximations,” Automatic Control, IEEE Transac-
tions on, vol. 17, no. 4, pp. 439–448, Aug 1972.
[5] G. Antonelli, F. Arrichiello, S. Chiaverini, and G. Sukhatme, “Ob-
servability analysis of relative localization for auvs based on ranging
and depth measurements,” in Robotics and Automation (ICRA), 2010
IEEE International Conference on, 2010, pp. 4276–4281.
[6] M. Aoki, Optimization of Stochastic Systems, Topics in Discrete-Time
Systems. Academic Press, New York, 1967.
[7] M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial
on particle filters for online nonlinear/non-gaussian bayesian tracking,”
IEEE Transactions on Signal Processing, vol. 50, no. 2, pp. 174–188,
Feb 2002.
[8] P. Baccou, B. Jouvencel, V. Creuze, and C. Rabaud, “Cooperative
positioning and navigation for multiple auv operations,” in MTS/IEEE
165

Bibliography 166
Oceans 2001. An Ocean Odyssey. Conference Proceedings (IEEE Cat.
No.01CH37295), vol. 3, Nov 2001, pp. 1816–1821 vol.3.
[9] A. Bahr, “Cooperative localization for autonomous underwater vehi-
cles,” Ph.D. dissertation, the Massachusetts Institute of Technology
and the Woods Hole Oceanographic Institution, February 2009.
[10] A. Bahr, J. Leonard, and A. Martinoli, “Dynamic positioning of bea-
con vehicles for cooperative underwater navigation,” in Intelligent
Robots and Systems (IROS), 2012 IEEE/RSJ International Confer-
ence on, Oct 2012, pp. 3760–3767.
[11] Y. Bar-Shalom, “Comments on ”comparison of two-sensor tracking
methods based on state vector fusion and measurement fusion” by j.
roecker et al,” IEEE Transactions on Aerospace and Electronic Sys-
tems, vol. 24, no. 4, pp. 456–457, July 1988.
[12] ——, Multitarget-Multisensor Tracking: Principles And Techniques,
3rd ed. YBS Publishing, 1995.
[13] Y. Bar-Shalom and L. Campo, “The effect of the common process noise
on the two-sensor fused-track covariance,” Aerospace and Electronic
Systems, IEEE Transactions on, vol. AES-22, no. 6, pp. 803–805, Nov
1986.
[14] S. Barkby, S. B. Williams, O. Pizarro, and M. V. Jakuba, “Bathy-
metric slam with no map overlap using gaussian processes,” in 2011
IEEE/RSJ International Conference on Intelligent Robots and Sys-
tems, Sep. 2011, pp. 1242–1248.
[15] A. R. Benaskeur, “Consistent fusion of correlated data sources,” in
IEEE 2002 28th Annual Conference of the Industrial Electronics So-
ciety. IECON 02, vol. 4, Nov 2002, pp. 2652–2656 vol.4.
[16] C. Bishop, Pattern Recognition and Machine Learning. Springer-
Verlag New York, 2006.

Bibliography 167
[17] Y. Boers, H. Driessen, A. Bagchi, and P. Mandal, “Particle filter based
entropy,” in 2010 13th International Conference on Information Fu-
sion, July 2010, pp. 1–8.
[18] N. Bore, I. Torroba, and J. Folkesson, “Sparse gaussian process
slam, storage and filtering for auv multibeam bathymetry,” in 2018
IEEE/OES Autonomous Underwater Vehicles (AUV 2018), (Porto,
Portugal), Nov 2018.
[19] Z. I. Botev, J. F. Grotowski, and D. P. Kroese, “Kernel density
estimation via diffusion,” Ann. Statist., vol. 38, no. 5, pp. 2916–2957,
10 2010. [Online]. Available: https://doi.org/10.1214/10-AOS799
[20] J. Busquets, J. V. Busquets, D. Tudela, F. Perez, J. Busquets-
Carbonell, A. Barbera, C. Rodrıguez, A. J. Garcıa, and J. Gilabert,
“Low-cost AUV based on arduino open source microcontroller board
for oceanographic research applications in a collaborative long term
deployment missions and suitable for combining with an usv as au-
tonomous automatic recharging platform,” in 2012 IEEE/OES Au-
tonomous Underwater Vehicles (AUV), Sept 2012, pp. 1–10.
[21] J. Byron and R. Tyce, “Designing a vertical / horizontal AUV for deep
ocean sampling,” in OCEANS 2007, Sept 2007, pp. 1–10.
[22] S. Carreno, P. Wilson, P. Ridao, and Y. Petillot, “A survey on terrain
based navigation for auvs,” in OCEANS 2010 MTS/IEEE SEATTLE,
Sept 2010, pp. 1–7.
[23] K. C. Chang, R. K. Saha, and Y. Bar-Shalom, “On optimal track-
to-track fusion,” IEEE Transactions on Aerospace and Electronic Sys-
tems, vol. 33, no. 4, pp. 1271–1276, Oct 1997.
[24] L. Chen, P. Arambel, and R. Mehra, “Fusion under unknown correla-
tion - covariance intersection as a special case,” in Information Fusion,
2002. Proceedings of the Fifth International Conference on, vol. 2, July
2002, pp. 905–912 vol.2.

Bibliography 168
[25] M. Chitre, “Path planning for cooperative underwater range-only nav-
igation using a single beacon,” in 2010 International Conference on
Autonomous and Intelligent Systems, AIS 2010, June 2010, pp. 1–6.
[26] R. Chou, Y. Boers, M. Podt, and M. Geist, “Performance evaluation
for particle filters,” in 14th International Conference on Information
Fusion, July 2011, pp. 1–7.
[27] D. Comaniciu, V. Ramesh, and P. Meer, “Real-time tracking of
non-rigid objects using mean shift,” in Proceedings IEEE Confer-
ence on Computer Vision and Pattern Recognition. CVPR 2000 (Cat.
No.PR00662), vol. 2, 2000, pp. 142–149 vol.2.
[28] J. Curcio, J. Leonard, J. Vaganay, A. Patrikalakis, A. Bahr, D. Battle,
H. Schmidt, and M. Grund, “Experiments in moving baseline navi-
gation using autonomous surface craft,” in Proceedings of OCEANS
2005 MTS/IEEE, Sept 2005, pp. 730–735 Vol. 1.
[29] A. Czirok and T. Vicsek, “Collective behavior of interacting
self-propelled particles,” Physica A: Statistical Mechanics and its Ap-
plications, vol. 281, no. 1, pp. 17 – 29, 2000. [Online]. Available: http:
//www.sciencedirect.com/science/article/pii/S0378437100000133
[30] P. D. Deshpande, M. N. Sangekar, B. Kalyan, M. A. Chitre, S. Sha-
habudeen, V. Pallayil, and T. B. Koay, “Design and development of
auvs for cooperative missions,” in Defence Technology Asia, Singapore,
March 22 2007.
[31] R. M. Eustice, H. Singh, and J. J. Leonard, “Exactly sparse delayed-
state filters for view-based slam,” IEEE Transactions on Robotics,
vol. 22, no. 6, pp. 1100–1114, Dec 2006.
[32] D. Fairbair, “Using entropy to assess the efficiency of terrain represen-
tation,” in 25th International Cartographic Conference. 2011, Paris,
France, 2011.
[33] M. F. Fallon, G. Papadopoulos, J. J. Leonard, and N. M. Patrikalakis,
“Cooperative AUV navigation using a single maneuvering surface

Bibliography 169
craft,” I. J. Robotics Res., vol. 29, no. 12, pp. 1461–1474, 2010.
[Online]. Available: https://doi.org/10.1177/0278364910380760
[34] D. Fox, W. Burgard, and S. Thrun, “Markov localization for mobile
robots in dynamic environments,” Journal of Artificial Intelligence
Research, 1999.
[35] R. P. Franca, A. T. S. andRafael D. S. Castro, B. N. Green, and
D. Marelli, “Trajectory generation for bathymetry based auv naviga-
tion and localization,” in 10th IFAC Conference on Manoeuvring and
Control of Marine Craft MCMC 2015: Copenhagen, vol. 48, 24–26
August 2015.
[36] A. S. Gadre and D. J. Stilwell, “Toward underwater navigation based
on range measurements from a single location,” in IEEE International
Conference on Robotics and Automation, 2004. Proceedings. ICRA
’04. 2004, vol. 5, April 2004, pp. 4472–4477 Vol.5.
[37] E. Galceran, S. Nagappa, M. Carreras, P. Ridao, and A. Palomer,
“Uncertainty-driven survey path planning for bathymetric mapping,”
in Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ Interna-
tional Conference on, Nov 2013, pp. 6006–6012.
[38] M. S. Grewal and A. P. Andrews, Kalman Filtering: Theory and Prac-
tice, 2nd ed. New York, USA: Wiley, 2000.
[39] S. Grime and H. Durrant-Whyte, “Data fusion in decentralized
sensor networks,” Control Engineering Practice, vol. 2, no. 5, pp.
849 – 863, 1994. [Online]. Available: http://www.sciencedirect.com/
science/article/pii/0967066194903492
[40] U. Hanebeck, K. Briechle, and J. Horn, “A tight bound for the joint
covariance of two random vectors with unknown but constrained cross-
correlation,” in Multisensor Fusion and Integration for Intelligent Sys-
tems, 2001. MFI 2001. International Conference on, 2001, pp. 85–90.
[41] G. Indiveri, “Geotechnical surveys with cooperative autonomous ma-
rine vehicles: the ec wimust project,” in 2018 IEEE/OES Autonomous
Underwater Vehicles (AUV 2018), (Porto, Portugal), Nov 2018.

Bibliography 170
[42] S. J. Julier and J. K. Uhlmann, “A non-divergent estimation algo-
rithm in the presence of unknown correlations,” in American Control
Conference, 1997. Proceedings of the 1997, vol. 4, 1997, pp. 2369–2373
vol.4.
[43] ——, “General decentralized data fusion with covariance intersection
(CI),” in Handbook of Multisensor Data Fusion. CRC Press LLC,
2001, ch. 12.
[44] ——, “Simultaneous localisation and map building using split covari-
ance intersection,” in Intelligent Robots and Systems, 2001. Proceed-
ings. 2001 IEEE/RSJ International Conference on, vol. 3, 2001, pp.
1257–1262 vol.3.
[45] ——, “Unscented filtering and nonlinear estimation,” Proceedings of
the IEEE, vol. 92, no. 3, pp. 401–422, March 2004.
[46] R. E. Kalman, “A new approach to linear filtering and prediction
problems,” Journal of Fluids Engineering, vol. 82, no. 1, pp. 35–45,
1960.
[47] B. Kalyan and M. Chitre, “A feasibility analysis on using bathymetry
for navigation of autonomous underwater vehicles,” in Proceedings
of the 28th Annual ACM Symposium on Applied Computing, ser.
SAC ’13. New York, NY, USA: ACM, 2013, pp. 229–231. [Online].
Available: http://doi.acm.org/10.1145/2480362.2480411
[48] H. Kaprykowsky and X. Rodet, “Globally optimal short-time dynamic
time warping application to score to audio alignment,” in IEEE In-
ternational Conference on Acoustics, Speech, and Signal Processing,
vol. 5, 2006, pp. 249–252.
[49] T. B. Koay, Y. T. Tan, Y. H. Eng, R. Gao, M. Chitre, J. L. Chew,
N. Chandhavarkar, R. Khan, T. Taher, and J. Koh, “Starfish – a
small team of autonomous robotic fish,” Indian Journal of geo-Marine
Science, vol. 40, no. 2, 2011.

Bibliography 171
[50] J. Kojima, Y. Kato, K. Asakawa, S. Matumoto, S. Takagi, and
N. Kato, “Development of autonomous underwater vehicle ‘AQUA
EXPLORER 2’ for inspection of underwater cables,” in Oceans ’97.
MTS/IEEE Conference Proceedings, vol. 2, Oct 1997, pp. 1007–1012
vol.2.
[51] H. Li, F. Nashashibi, and M. Yang, “Split covariance intersection fil-
ter: Theory and its application to vehicle localization,” Intelligent
Transportation Systems, IEEE Transactions on, vol. 14, no. 4, pp.
1860–1871, 2013.
[52] H. Li and F. Nashashibi, “Cooperative multi-vehicle localization using
split covariance intersection filter,” Intelligent Transportation Systems
Magazine, IEEE, vol. 5, no. 2, pp. 33–44, 2013.
[53] J. Liu, Z. Wang, Z. Peng, J. Cui, and L. Fiondella, “Suave: Swarm un-
derwater autonomous vehicle localization,” in IEEE INFOCOM 2014
- IEEE Conference on Computer Communications, April 2014, pp.
64–72.
[54] A. Martins, J. M. Almeida, and E. Silva, “Coordinated maneuver
for gradient search using multiple auvs,” in Oceans 2003. Celebrating
the Past ... Teaming Toward the Future (IEEE Cat. No.03CH37492),
vol. 1, Sept 2003, pp. 347–352 Vol.1.
[55] D. K. Meduna, S. M. Rock, and R. S. McEwen, “Closed-loop ter-
rain relative navigation for auvs with non-inertial grade navigation
sensors,” in 2010 IEEE/OES Autonomous Underwater Vehicles, Sept
2010, pp. 1–8.
[56] D. Meduna, S. Rock, and R. McEwen, “Closed-loop terrain relative
navigation for auvs with non-inertial grade navigation sensors,” in Au-
tonomous Underwater Vehicles (AUV), 2010 IEEE/OES, Sept 2010,
pp. 1–8.
[57] P. Milne, Underwater Acoustic Positioning Systems. Gulf Publishing
Company, 1983.

Bibliography 172
[58] S. C. Nair, E. M. Coronado, M. T. Frye, and Y. Qin, “Swarm intel-
ligence for the control of a group of robots,” in 2015 10th System of
Systems Engineering Conference (SoSE), May 2015, pp. 205–207.
[59] C. L. Ng, Q. Q. Chen, J. J. Chua, and H. F. Hemond, “A multi-
platform optical sensor for in vivo and in vitro algae classification,”
Sensors (Basel), vol. 17, no. 4, 2017.
[60] M. K. Nighot, V. H. Patil, and G. S. Mani, “Multi-robot hunting
based on swarm intelligence,” in 2012 12th International Conference
on Hybrid Intelligent Systems (HIS), Dec 2012, pp. 203–206.
[61] D. R. Parhi, J. K. Pothal, and M. K. Singh, “Navigation of multiple
mobile robots using swarm intelligence,” in 2009 World Congress on
Nature Biologically Inspired Computing (NaBIC), Dec 2009, pp. 1145–
1149.
[62] D. Peng, T. Zhou, H. Li, and W. Zhang, “Terrain aided navigation
for underwater vehicles using maximum likelihood method,” in 2016
IEEE/OES China Ocean Acoustics (COA), Jan 2016, pp. 1–6.
[63] A. Phillips, D. Fenucci, A. Munafo, J. Neasham, N. Gold, J. Sitbon,
I. Vincent, and T. Sloane, “Development of smart networks for navi-
gation in dynamic underwater environments,” in 2018 IEEE/OES Au-
tonomous Underwater Vehicles (AUV 2018), (Porto, Portugal), Nov
2018.
[64] A. Phillips, G. Salavasidis, M. Kingsland, C. Harris, M. Pebody,
D. Roper, R. Templeton, S. McPhail, T. Prampart, T. Wood, R. Tay-
lor, and T. Jones, “Autonomous surface/subsurface survey system field
trials,” in 2018 IEEE/OES Autonomous Underwater Vehicles (AUV
2018), (Porto, Portugal), Nov 2018.
[65] W. B. Powell, Approximate Dynamic Programming: Solving the
Curses of Dimensionality (Wiley Series in Probability and Statistics).
New York, NY, USA: Wiley-Interscience, 2007.

Bibliography 173
[66] C. E. Rasmussen and C. K. I. Williams, Gaussian Processes for Ma-
chine Learning. The MIT Press, 2006.
[67] S. Reece and S. Roberts, “Robust, low-bandwidth, multi-vehicle map-
ping,” in Information Fusion, 2005 8th International Conference on,
vol. 2, July 2005, pp. 8 pp.–.
[68] S. I. Roumuliotis and G. A. Bekey, “Collective localization: A dis-
tributed kalman filter approach to localization of groups of mobile
robots,” in the 2000 IEEE International Conference on Robotics &
Automation, San Francisco, CA, April 2000.
[69] G. Rui and M. Chitre, “Cooperative multi-auv localization using dis-
tributed extended information filter,” in 2016 IEEE/OES Autonomous
Underwater Vehicles (AUV), Nov 2016, pp. 206–212.
[70] ——, “On distributed processing for underwater cooperative localiza-
tion,” in 2017 14th International Conference on Ubiquitous Robots and
Ambient Intelligence (URAI), June 2017, pp. 507–511.
[71] ——, “Path planning for bathymetry-aided underwater navigation,”
in 2018 IEEE/OES Autonomous Underwater Vehicles (AUV 2018),
(Porto, Portugal), Nov 2018.
[72] ——, “Cooperative positioning using range-only measurements be-
tween two auvs,” in OCEANS’10 IEEE SYDNEY, May 2010, pp. 1–6.
[73] G. Salavasidis, C. Harris, S. McPhail, A. B. Phillips, and E. Rogers,
“Terrain aided navigation for long range auv operations at arctic lati-
tudes,” in 2016 IEEE/OES Autonomous Underwater Vehicles (AUV),
Nov 2016, pp. 115–123.
[74] Sam and N. Reid, “The self-driven particle model - an interactive
tutorial,” http://tutorials.siam.org/dsweb/particles/, 2005.
[75] J. Sijs, M. Lazar, and P. v.d.Bosch, “State fusion with unknown cor-
relation: Ellipsoidal intersection,” in American Control Conference
(ACC), 2010, June 2010, pp. 3992–3997.

Bibliography 174
[76] T. L. Song, “Observability of target tracking with range-only mea-
surements,” IEEE Journal of Oceanic Engineering, vol. 24, no. 3, pp.
383–387, July 1999.
[77] S. Spires and S. Goldsmith, “Exhaustive geographic search with
mobile robots along space-filling curves,” in Collective Robotics, ser.
Lecture Notes in Computer Science, A. Drogoul, M. Tambe, and
T. Fukuda, Eds. Springer Berlin Heidelberg, 1998, vol. 1456, pp.
1–12. [Online]. Available: http://dx.doi.org/10.1007/BFb0033369
[78] M. Stipanov and S. Fioravanti, “Camelot - localization beacon sys-
tem,” in 2018 IEEE/OES Autonomous Underwater Vehicles (AUV
2018), (Porto, Portugal), Nov 2018.
[79] R. S. Sutton and A. G. Barto, Introduction to Reinforcement Learning,
1st ed. Cambridge, MA, USA: MIT Press, 1998.
[80] Y. T. Tan, M. Chitre, and F. S. Hover, “Cooperative bathymetry-
based localization using low-cost autonomous underwater vehicles,”
Autonomous Robots, 2015.
[81] Y. T. Tan, R. Gao, and M. Chitre, “Cooperative path planning for
range-only localization using a single moving beacon,” IEEE Journal
of Oceanic Engineering, vol. 39, no. 2, pp. 371–385, April 2014.
[82] T. Tao, Y. Huang, J. Yuan, F. Sun, and X. Wu, “Cooperative si-
multaneous localization and mapping for multi-robot: Approach &
experimental validation,” in 2010 8th World Congress on Intelligent
Control and Automation, July 2010, pp. 2888–2893.
[83] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. MIT Press,
2005.
[84] J. K. Uhlmann, “Covariance consistency methods for fault-tolerant
distributed data fusion,” Information Fusion, vol. 4, no. 3, pp. 201–
215, September 2003.

Bibliography 175
[85] S. E. Webster, R. M. Eustice, H. Singh, and L. L. Whitcomb, “Ad-
vances in single-beacon one-way-travel-time acoustic navigation for un-
derwater vehicles,” I. J. Robotics Res., vol. 31, no. 8, pp. 935—-950,
2012.
[86] S. Webster, J. Walls, L. Whitcomb, and R. Eustice, “Decentralized
extended information filter for single-beacon cooperative acoustic nav-
igation: Theory and experiments,” Robotics, IEEE Transactions on,
vol. 29, no. 4, pp. 957–974, 2013.
[87] Y. Weiss and W. T. Freeman, “Correctness of belief propagation in
gaussian graphical models of arbitrary topology,” Neural Computation,
vol. 13, no. 10, pp. 2173–2200, Oct 2001.
[88] G. Welch and G. Bishop, “An introduction to the kalman filter,” Uni-
versity of North Carolina at Chapel Hill, Chapel Hill, NC, 1995.
[89] J. F. Wellmann, “Information theory for correlation analysis
and estimation of uncertainty reduction in maps and models,”
Entropy, vol. 15, no. 4, pp. 1464–1485, 2013. [Online]. Available:
http://www.mdpi.com/1099-4300/15/4/1464
[90] E. Wolbrecht, B. Gill, R. Borth, J. Canning, M. Anderson, and D. Ed-
wards, “Hybrid baseline localization for autonomous underwater vehi-
cles,” Journal of Intelligent & Robotic Systems, vol. 78, pp. 593–611,
2015.
[91] X. S. Zhou and S. I. Roumeliotis, “Determining the robot-to-robot
relative pose using range-only measurements,” in Proceedings of IEEE
International Conference on Robotics and Automation, Rome, Italy,
April 2007, pp. 4025–4031.
[92] Y. Zhou and J. Li, “Data fusion of unknown correlations using internal
ellipsodal approximation,” in Proceedings of the 17th World Congress,
The International Federation of AUtomatic Control Seoul, Korea, July
2008.