Embed Size (px)
Citation preview
��
��
Lecture Notes 8: Trellis Codes
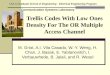
In this lecture we discuss construction of signals via a trellis. That is, signals are constructed
by labeling the branches of an infinite trellis with signals from a small set. Because the trellis
is of infinite length this is conceptually different than the signals created in the previous
chapter. We the codes generated are linear (the sum of any two sequences is also a valid
sequence) then the codes are known as convolutional codes. We first discuss convolutional
codes, then optimum decoding of convolutional codes, then discuss ways to evaluated the
performance of convolutional codes. Finally we discuss the more general trellis codes for
QAM and PSK types of modulation.
VIII-1
��
��
Convolutional Codes
Unlike block codes, convolutional codes are not of fixed length. The encoder instead
processes using a sliding window the information bit sequence to produce a channel bit
sequence. The window operates on a number of information bits at a time to produce a
number of channel bits. For example, the encoder shown below examines three consecutive
information bits and produces two channel bits. The encoder then shifts in a new information
bit and produces another set of two channel bits based on the new information bit and the
previous two information bits. In general the encoder stores M information bits. Based on
these bits and the current set of k input bits produces n channel bits. The memory of the
encoder is M. The constraint length is the largest number of consecutive input bits that any
particular output depends. In the above example the outputs depend on a maximum of 3
consecutive input bits. The rate is k � n.
The operation to produce the channel bits is a linear combination of the information bits in the
encoder. Because of this linearity each output of the encoder is a convolution of the input
information stream with some impulse response of the encoder and hence the name
convolutional codes.
VIII-2
��
��
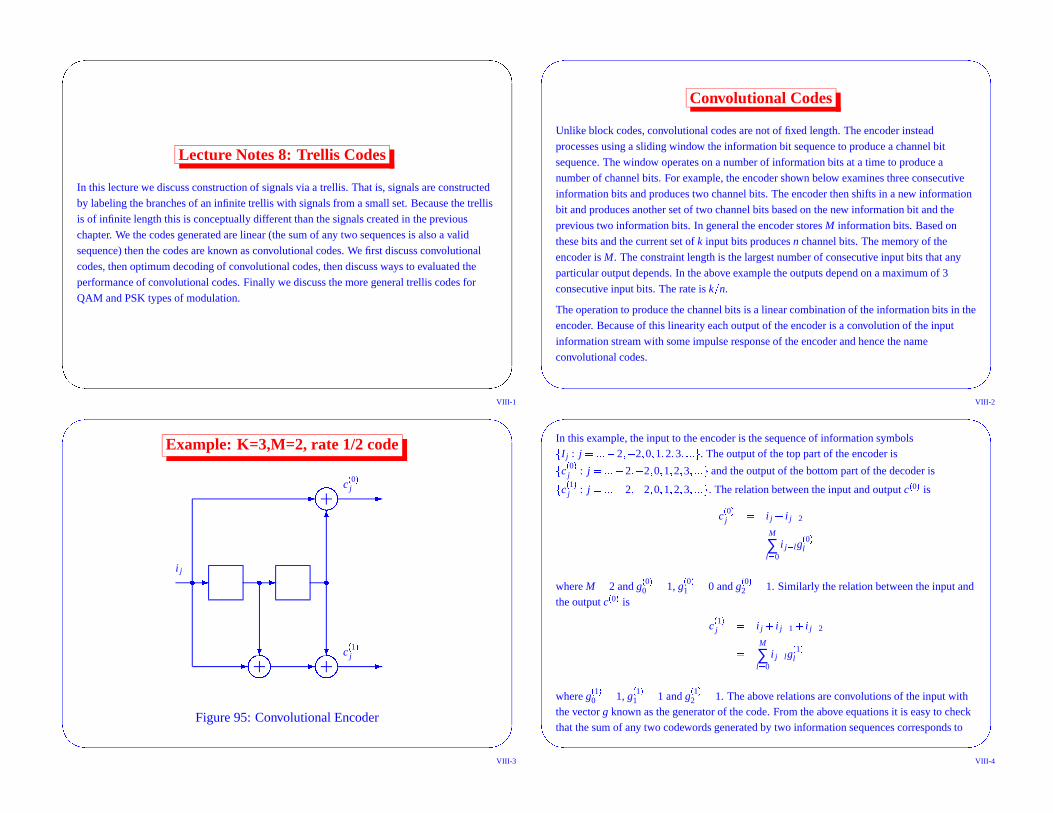
Example: K=3,M=2, rate 1/2 code
�i j ��� ��� �� ��� �c� 1
j
� ���� �c� 0
j
� � �
Figure 95: Convolutional Encoder
VIII-3
��
��
In this example, the input to the encoder is the sequence of information symbols� I j : j� � � �� 2 �� 2 � 0 � 1 � 2 � 3 � � � � � . The output of the top part of the encoder is
� c� 0
j : j� � � �� 2 �� 2 � 0 � 1 � 2 � 3 � � � � � and the output of the bottom part of the decoder is
� c� 1
j : j� � � �� 2 �� 2 � 0 � 1 � 2 � 3 � � � � � . The relation between the input and output c� 0 isc� 0
j
� i j� i j� 2
� M
∑l� 0
i j� lg� 0
l
where M� 2 and g� 0
0
� 1, g� 0
1
� 0 and g� 0
2
� 1. Similarly the relation between the input andthe output c� 0 is
c� 1
j
� i j� i j� 1� i j� 2
� M
∑l� 0
i j� lg� 1
l
where g� 1
0
� 1, g� 1
1
� 1 and g� 1 2
� 1. The above relations are convolutions of the input withthe vector g known as the generator of the code. From the above equations it is easy to checkthat the sum of any two codewords generated by two information sequences corresponds to
VIII-4
��
��
the codeword generated from the sum of the two information sequences. Thus the code is
linear. Because of this we can assume in our analysis without loss of generality that the all
zero information sequence (and codeword) is the transmitted sequence.
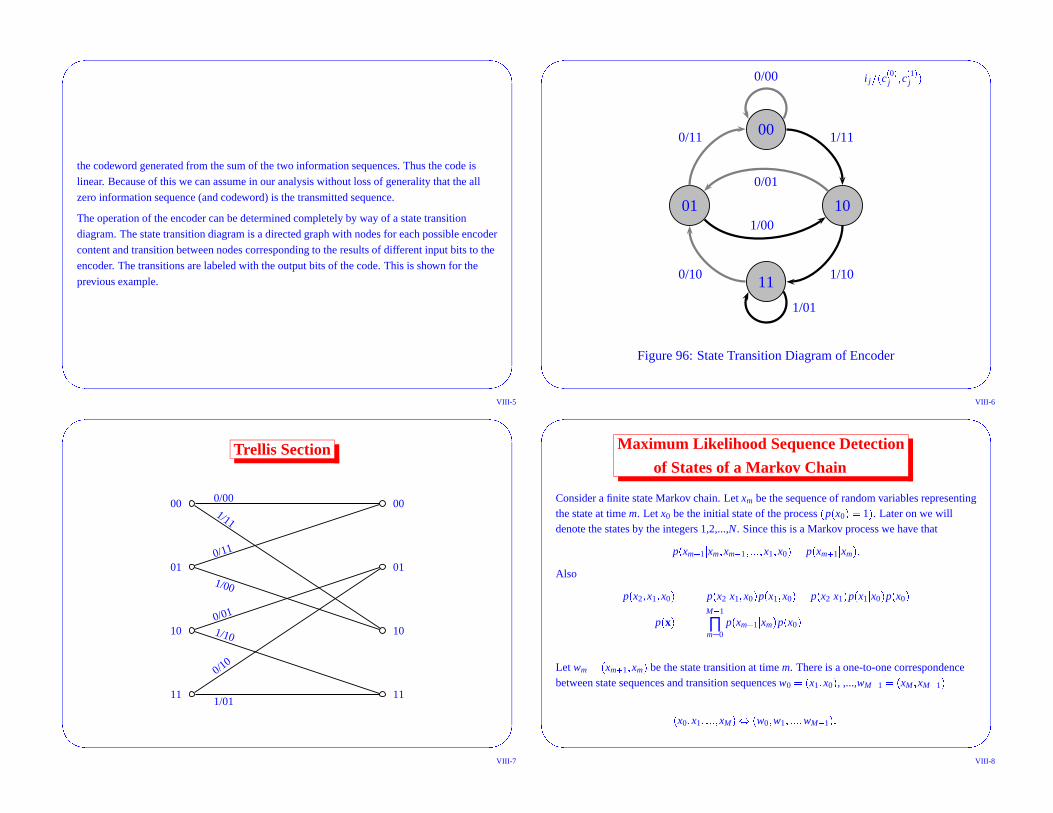
The operation of the encoder can be determined completely by way of a state transition
diagram. The state transition diagram is a directed graph with nodes for each possible encoder
content and transition between nodes corresponding to the results of different input bits to the
encoder. The transitions are labeled with the output bits of the code. This is shown for the
previous example.
VIII-5
��
��
01
11
00
10
1/11
0/00
1/100/10
0/01
1/00
0/11
1/01
i j �� c� 0
j � c� 1
j �
Figure 96: State Transition Diagram of Encoder
VIII-6
��
��
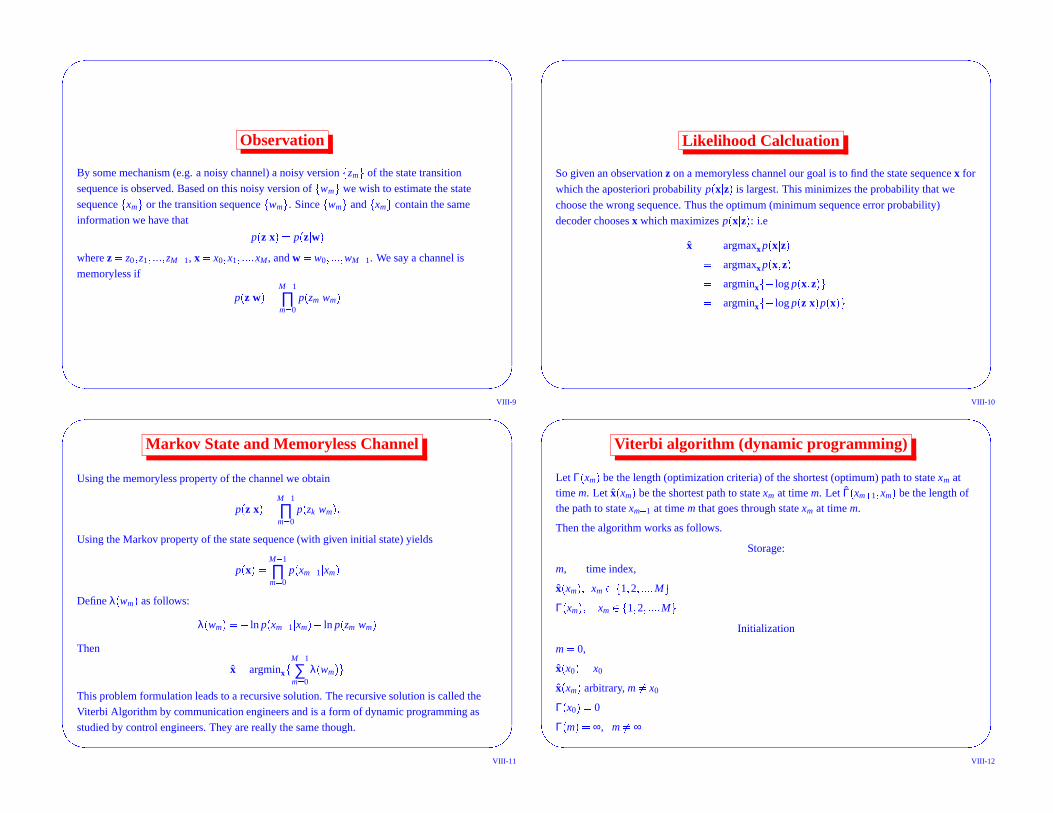
Trellis Section
00
01
10
11
00
01
10
11
0/001/11
1/00
0/11
0/01
1/10
0/10
1/01
VIII-7
��
��
Maximum Likelihood Sequence Detection
of States of a Markov Chain
Consider a finite state Markov chain. Let xm be the sequence of random variables representingthe state at time m. Let x0 be the initial state of the process� p� x0 � � 1 � . Later on we willdenote the states by the integers 1,2,...,N. Since this is a Markov process we have that
p� xm � 1 � xm � xm� 1 � � � � � x1 � x0 � � p� xm � 1 � xm � �
Also
p� x2 � x1 � x0 � � p� x2 � x1 � x0 � p� x1 � x0 � � p� x2 � x1 � p� x1 � x0 � p� x0 �
p� x � � M� 1
∏m� 0
p� xm � 1 � xm � p� x0 �
Let wm� � xm � 1 � xm � be the state transition at time m. There is a one-to-one correspondencebetween state sequences and transition sequences w0� � x1 � x0 � , ,...,wM� 1� � xM � xM� 1 �
� x0 � x1 � � � � � xM �� � w0 � w1 � � � � � wM� 1 � �
VIII-8
��
��
Observation
By some mechanism (e.g. a noisy channel) a noisy version � zm � of the state transition
sequence is observed. Based on this noisy version of � wm � we wish to estimate the state
sequence � xm � or the transition sequence � wm � . Since � wm � and � xm � contain the same
information we have that
p� z � x � � p� z � w �
where z� z0 � z1 � � � � � zM� 1, x� x0 � x1 � � � � � xM, and w� w0 � � � � � wM� 1. We say a channel is
memoryless if
p� z � w � � M� 1
∏m� 0
p� zm � wm �
VIII-9
��
��
Likelihood Calcluation
So given an observation z on a memoryless channel our goal is to find the state sequence x for
which the aposteriori probability p� x � z � is largest. This minimizes the probability that we
choose the wrong sequence. Thus the optimum (minimum sequence error probability)
decoder chooses x which maximizes p� x � z � : i.e
x̂ � argmaxx p� x � z �� argmaxx p� x � z �� argminx � � log p� x � z � �� argminx � � log p� z � x � p� x � �
VIII-10
��
��
Markov State and Memoryless Channel
Using the memoryless property of the channel we obtain
p� z � x � � M� 1
∏m� 0
p� zk � wm � �
Using the Markov property of the state sequence (with given initial state) yields
p� x � � M� 1
∏m� 0
p� xm � 1 � xm �
Define λ� wm � as follows:
λ� wm � � � ln p� xm � 1 � xm � � ln p� zm � wm �
Then
x̂� argminx � M� 1
∑m� 0
λ� wm � �
This problem formulation leads to a recursive solution. The recursive solution is called the
Viterbi Algorithm by communication engineers and is a form of dynamic programming as
studied by control engineers. They are really the same though.
VIII-11
��
��
Viterbi algorithm (dynamic programming)
Let Γ� xm � be the length (optimization criteria) of the shortest (optimum) path to state xm attime m. Let x̂� xm � be the shortest path to state xm at time m. Let Γ̂� xm � 1 � xm � be the length ofthe path to state xm � 1 at time m that goes through state xm at time m.
Then the algorithm works as follows.
Storage:
m, time index,
x̂� xm � � xm� � 1 � 2 � � � � � M �
Γ� xm � � xm� � 1 � 2 � � � � � M �Initialization
m� 0,
x̂� x0 � � x0
x̂� xm � arbitrary, m �� x0
Γ� x0 � � 0
Γ� m � � ∞, m �� ∞
VIII-12
��
��
Recursion
Γ̂� xm � 1 � xm � � Γ� xm � � λ� wm �
Γ� xm � 1 � � minxm Γ̂� xm � 1 � xm � for each xm � 1
Let x̂m� xm � 1 � � argminxmΓ̂� xm � 1 � xm � . x̂� xm � 1 � � � x̂� xm � � xm � 1 �
Justification:
Basically we are interested in finding the shortest length path through the trellis. At time m we
find the shortest length paths to each of the possible states at time m by computing all possible
ways of getting to state xm� u from a state at time m� 1. If the shortest path (denoted by
x̂� u � ) to get to xm� u at time m goes through state xm� 1� v at time m� 1 (i.e. x̂� u � � x̂� v � � u)
then the corresponding path x̂� v � to state xm� 1� v must be the shortest path to state v at time
m� 1 since if there was a shorter path, say x̃� v � , to state v at time m� 1 then the path x̃� v � � u to
state u at time m that used this shorter path to state v at time m� 1 would be shorter then what
we assumed was the shortest path). Stated another way if the shortest way of getting to state u
at time m is by going through state v at time m� 1 then the path used to get to state v at time
m� 1 must be the shortest of all paths to state v at time m� 1.
VIII-13
��
��
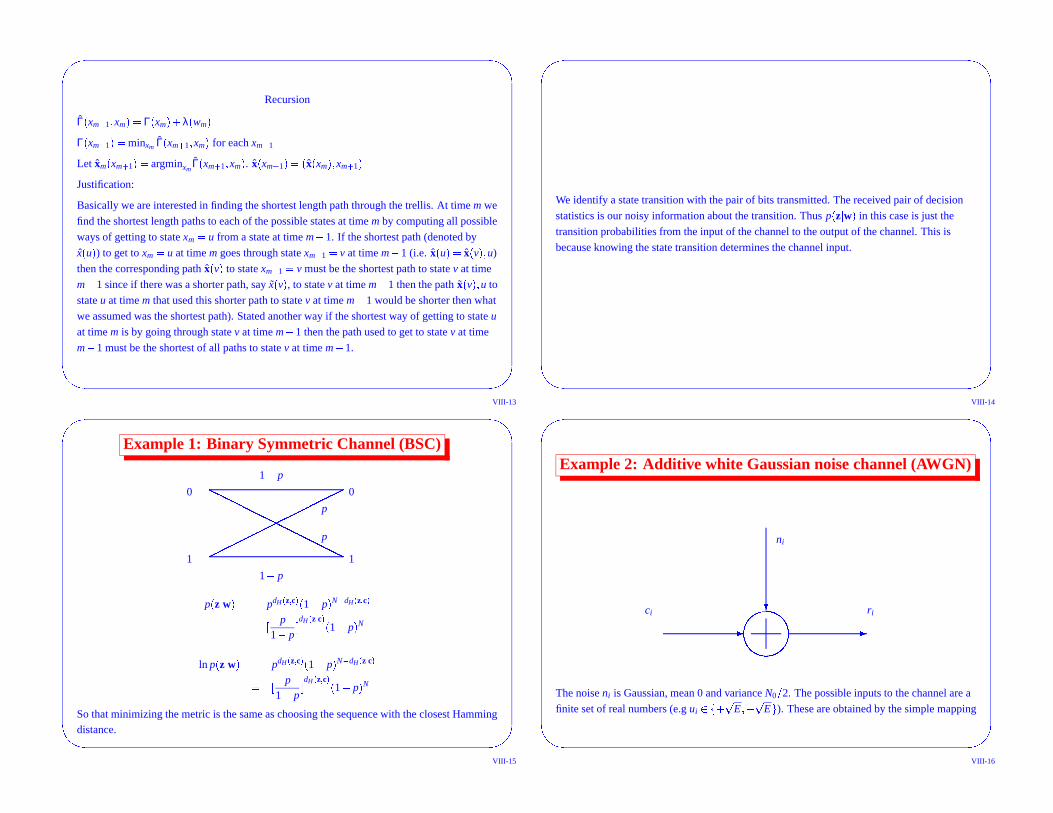
We identify a state transition with the pair of bits transmitted. The received pair of decision
statistics is our noisy information about the transition. Thus p� z � w � in this case is just the
transition probabilities from the input of the channel to the output of the channel. This is
because knowing the state transition determines the channel input.
VIII-14
��
��
Example 1: Binary Symmetric Channel (BSC)
� � � � � � � � � � � �� � � � � � � � � � � �1 1
0 0
1� p
1� p
p
p
p� z � w � � pdH� z � c � 1� p �
N� dH� z � c
� � p1� p� dH� z � c
� 1� p �
N
ln p� z � w � � pdH� z � c � 1� p �
N� dH� z � c
� � p1� p� dH� z � c
� 1� p �
N
So that minimizing the metric is the same as choosing the sequence with the closest Hammingdistance.
VIII-15
��
��
Example 2: Additive white Gaussian noise channel (AWGN)
�����
��
ci
ni
ri
The noise ni is Gaussian, mean 0 and variance N0 � 2. The possible inputs to the channel are a
finite set of real numbers (e.g ui� � � E �� E � ). These are obtained by the simple mapping
VIII-16
��
��
u� � � 1 �c j . The transition probability is
p� z � u � � N
∏i� 1
1 2πσexp � � 1
2σ2� zi� ui �
2 � �
� � 1 2πσ� N exp � � 12σ2
N
∑i� 1
� zi� ui �
2 �
� � 1 2πσ� N exp � � 12σ2 d2
E� z � u � � �
where d2E� z � u � � ∑N
i� 1� zi� ui �
2 is the squared Euclidean distance between the input and the
output of the channel. Thus finding u to maximize p� z � u � is equivalent to finding u to
minimize d2E� z � u � .
Thus in these two cases we can equivalently use a distance function (between what is received
and what would have been transmitted along a given path) as the function we minimize. This
should be obvious from the case of block codes.
VIII-17
��
��
0 5 10 15 20 25 30−5
−4.5
−4
−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0
VIII-18
��
��
Weight Enumerator for Convolutional Codes
In this section we show how to determine the weight enumerator polynomials for
convolutional codes. The weight enumerator polynomial is a method for counting the number
of codewords of a given Hamming weight with a certain number of input ones and a certain
length. It will be useful when error probability bounds are discussed.
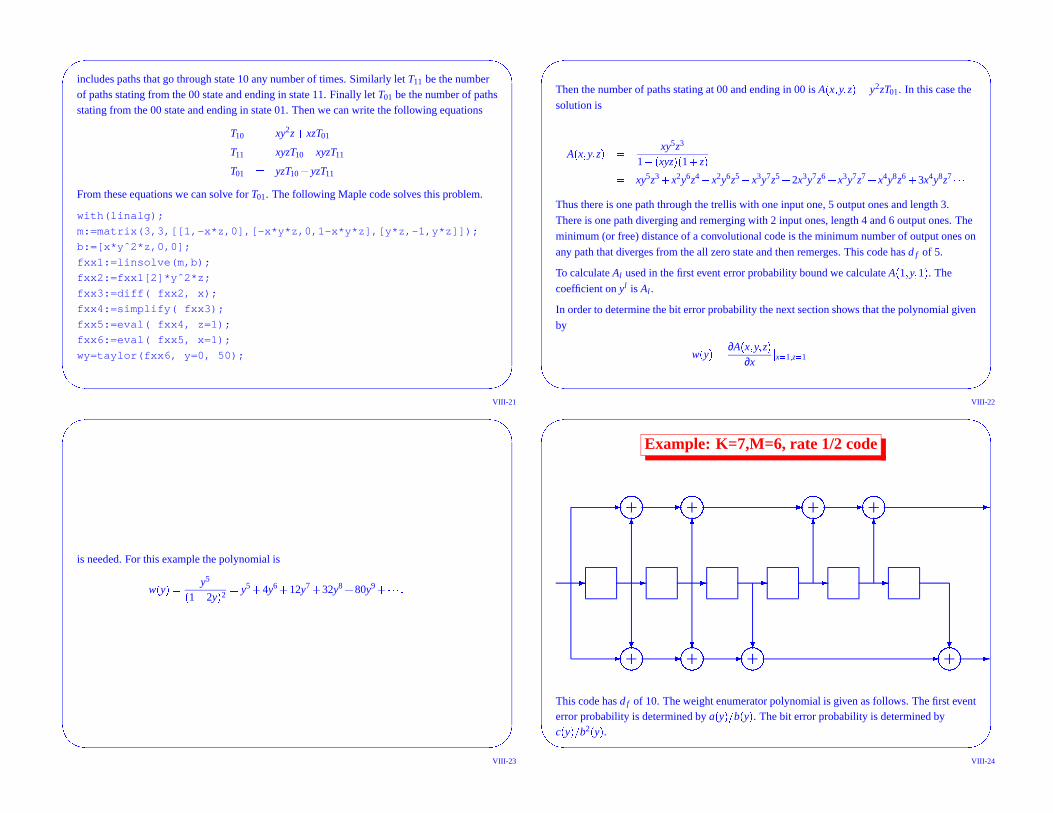
Consider the earlier example with four states. We would like to determine the number of paths
that start in the zero state (say), diverge from the zero state for some time and then remerge
with the zero state such that there are a certain number of input ones, a certain number of
output ones and a certain length. To do this let us split the zero state into a begining state and
ending state. In addition we label each path with three variables (x � y � z). The power on x is the
number of input ones; the power on y is the number of output ones; the power on z is the
length of that path (namely one). To get the parameters for two consecutive paths we multiply
these variables.
VIII-19
��
��
1001
11
00
X1Y1Z
X0Y1Z
X0Y2Z
X0Y1Z
X1Y0Z
X1Y2Z
X1Y1Z
Figure 97: State transition diagram of encoder
Let T10 represent the number of paths stating in the all zero state and ending in state 10. This
VIII-20
��
��
includes paths that go through state 10 any number of times. Similarly let T11 be the numberof paths stating from the 00 state and ending in state 11. Finally let T01 be the number of pathsstating from the 00 state and ending in state 01. Then we can write the following equations
T10 � xy2z� xzT01
T11 � xyzT10� xyzT11
T01 � yzT10� yzT11
From these equations we can solve for T01. The following Maple code solves this problem.
with(linalg);
m:=matrix(3,3,[[1,-x*z,0],[-x*y*z,0,1-x*y*z],[y*z,-1,y*z]]);
b:=[x*yˆ2*z,0,0];
fxx1:=linsolve(m,b);
fxx2:=fxx1[2]*yˆ2*z;
fxx3:=diff( fxx2, x);
fxx4:=simplify( fxx3);
fxx5:=eval( fxx4, z=1);
fxx6:=eval( fxx5, x=1);
wy=taylor(fxx6, y=0, 50);
VIII-21
��
��
Then the number of paths stating at 00 and ending in 00 is A� x � y � z � � y2zT01. In this case the
solution is
A� x � y � z � � xy5z3
1� � xyz �� 1� z �� xy5z3� x2y6z4� x2y6z5� x3y7z5� 2x3y7z6� x3y7z7� x4y8z6� 3x4y8z7
� � �
Thus there is one path through the trellis with one input one, 5 output ones and length 3.
There is one path diverging and remerging with 2 input ones, length 4 and 6 output ones. The
minimum (or free) distance of a convolutional code is the minimum number of output ones on
any path that diverges from the all zero state and then remerges. This code has d f of 5.
To calculate Al used in the first event error probability bound we calculate A� 1 � y � 1 � . The
coefficient on yl is Al .
In order to determine the bit error probability the next section shows that the polynomial given
by
w� y � � ∂A� x � y � z �
∂x � x� 1 � z� 1�
VIII-22
��
��
is needed. For this example the polynomial is
w� y � � y5
� 1� 2y �
2
� y5� 4y6� 12y7� 32y8� 80y9� � � � �
VIII-23
��
��
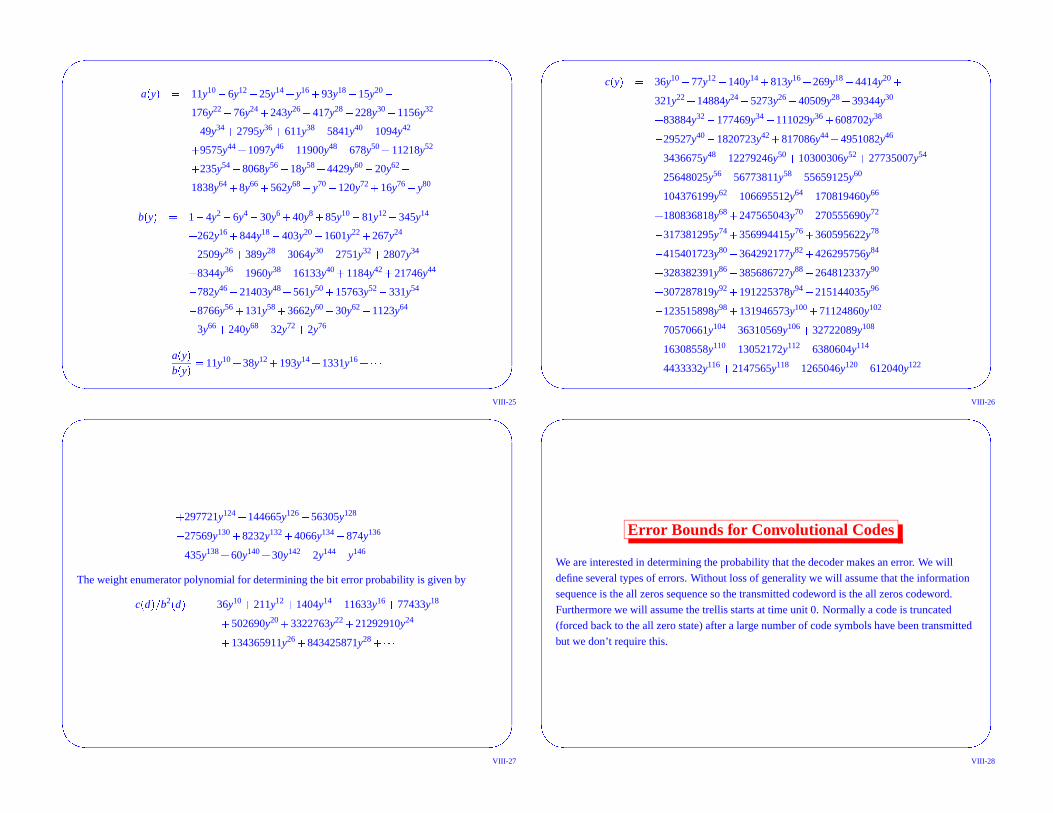
Example: K=7,M=6, rate 1/2 code
� � � � � �
�� ��� �� � � � �� ��� �� ��� �
� ���� � �� � � � �� � � � ���� �
This code has d f of 10. The weight enumerator polynomial is given as follows. The first eventerror probability is determined by a� y � � b� y � . The bit error probability is determined byc� y � � b2
� y � .
VIII-24
��
��
a� y � � 11y10� 6y12� 25y14� y16� 93y18� 15y20�
176y22� 76y24� 243y26� 417y28� 228y30� 1156y32
� 49y34� 2795y36� 611y38� 5841y40� 1094y42
� 9575y44� 1097y46� 11900y48� 678y50� 11218y52
� 235y54� 8068y56� 18y58� 4429y60� 20y62�
1838y64� 8y66� 562y68� y70� 120y72� 16y76� y80
b� y � � 1� 4y2� 6y4� 30y6� 40y8� 85y10� 81y12� 345y14
� 262y16� 844y18� 403y20� 1601y22� 267y24
� 2509y26� 389y28� 3064y30� 2751y32� 2807y34
� 8344y36� 1960y38� 16133y40� 1184y42� 21746y44
� 782y46� 21403y48� 561y50� 15763y52� 331y54
� 8766y56� 131y58� 3662y60� 30y62� 1123y64
� 3y66� 240y68� 32y72� 2y76
a� y �
b� y �� 11y10� 38y12� 193y14� 1331y16� � � �
VIII-25
��
��
c� y � � 36y10� 77y12� 140y14� 813y16� 269y18� 4414y20�
321y22� 14884y24� 5273y26� 40509y28� 39344y30
� 83884y32� 177469y34� 111029y36� 608702y38
� 29527y40� 1820723y42� 817086y44� 4951082y46
� 3436675y48� 12279246y50� 10300306y52� 27735007y54
� 25648025y56� 56773811y58� 55659125y60
� 104376199y62� 106695512y64� 170819460y66
� 180836818y68� 247565043y70� 270555690y72
� 317381295y74� 356994415y76� 360595622y78
� 415401723y80� 364292177y82� 426295756y84
� 328382391y86� 385686727y88� 264812337y90
� 307287819y92� 191225378y94� 215144035y96
� 123515898y98� 131946573y100� 71124860y102
� 70570661y104� 36310569y106� 32722089y108
� 16308558y110� 13052172y112� 6380604y114
� 4433332y116� 2147565y118� 1265046y120� 612040y122
VIII-26
��
��
� 297721y124� 144665y126� 56305y128
� 27569y130� 8232y132� 4066y134� 874y136
� 435y138� 60y140� 30y142� 2y144� y146
The weight enumerator polynomial for determining the bit error probability is given by
c� d � � b2
� d � � 36y10� 211y12� 1404y14� 11633y16� 77433y18
� 502690y20� 3322763y22� 21292910y24
� 134365911y26� 843425871y28� � � �
VIII-27
��
��
Error Bounds for Convolutional Codes
We are interested in determining the probability that the decoder makes an error. We will
define several types of errors. Without loss of generality we will assume that the information
sequence is the all zeros sequence so the transmitted codeword is the all zeros codeword.
Furthermore we will assume the trellis starts at time unit 0. Normally a code is truncated
(forced back to the all zero state) after a large number of code symbols have been transmitted
but we don’t require this.
VIII-28
��
��
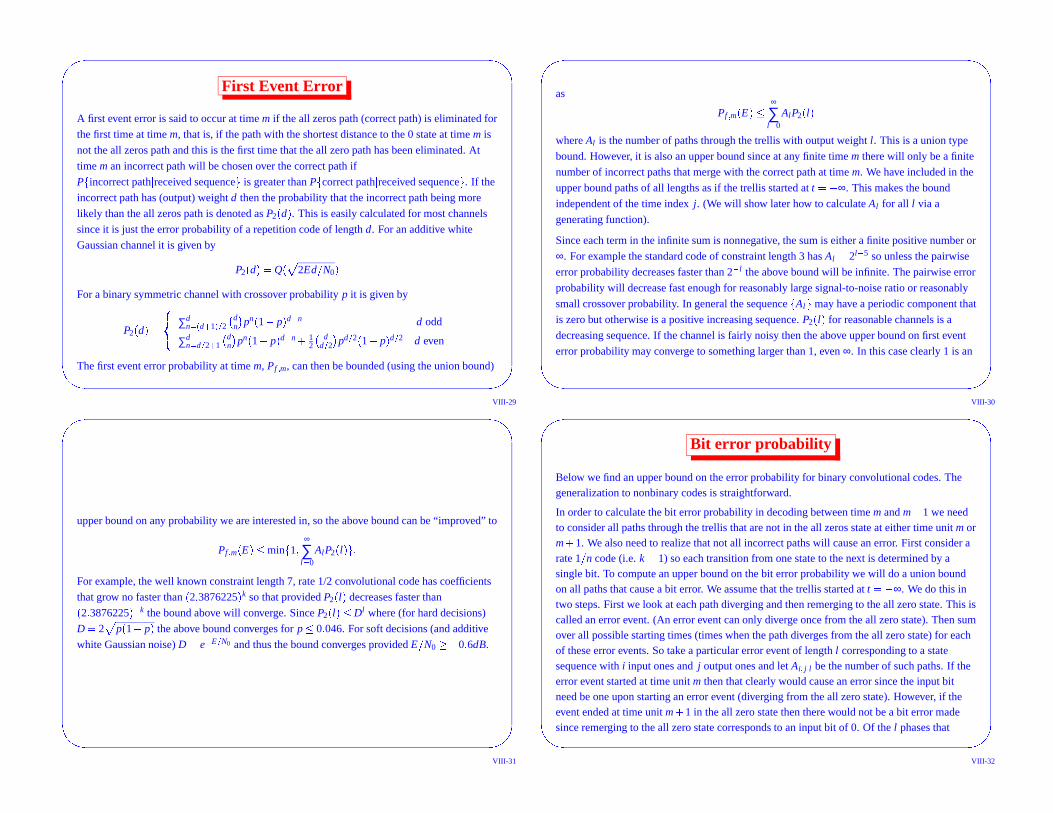
First Event Error
A first event error is said to occur at time m if the all zeros path (correct path) is eliminated for
the first time at time m, that is, if the path with the shortest distance to the 0 state at time m is
not the all zeros path and this is the first time that the all zero path has been eliminated. At
time m an incorrect path will be chosen over the correct path if
P � incorrect path � received sequence � is greater than P � correct path � received sequence � . If the
incorrect path has (output) weight d then the probability that the incorrect path being more
likely than the all zeros path is denoted as P2� d � . This is easily calculated for most channels
since it is just the error probability of a repetition code of length d. For an additive white
Gaussian channel it is given by
P2� d � � Q� � 2Ed � N0 �
For a binary symmetric channel with crossover probability p it is given by
P2� d � � ��
�
∑dn� � d � 1 � 2 � d
n� pn
� 1� p �
d� n d odd
∑dn� d� 2 � 1 � d
n� pn
� 1� p �
d� n� 12 � d
d� 2� pd� 2� 1� p �
d� 2 d even
The first event error probability at time m, Pf � m, can then be bounded (using the union bound)
VIII-29
��
��
as
Pf � m� E ��
∞
∑l� 0
AlP2� l �
where Al is the number of paths through the trellis with output weight l. This is a union type
bound. However, it is also an upper bound since at any finite time m there will only be a finite
number of incorrect paths that merge with the correct path at time m. We have included in the
upper bound paths of all lengths as if the trellis started at t� � ∞. This makes the bound
independent of the time index j. (We will show later how to calculate Al for all l via a
generating function).
Since each term in the infinite sum is nonnegative, the sum is either a finite positive number or
∞. For example the standard code of constraint length 3 has Al� 2l� 5 so unless the pairwise
error probability decreases faster than 2� l the above bound will be infinite. The pairwise error
probability will decrease fast enough for reasonably large signal-to-noise ratio or reasonably
small crossover probability. In general the sequence � Al � may have a periodic component that
is zero but otherwise is a positive increasing sequence. P2� l � for reasonable channels is a
decreasing sequence. If the channel is fairly noisy then the above upper bound on first event
error probability may converge to something larger than 1, even ∞. In this case clearly 1 is an
VIII-30
��
��
upper bound on any probability we are interested in, so the above bound can be “improved” to
Pf � m� E �� min � 1 � ∞
∑l� 0
AlP2� l � � �
For example, the well known constraint length 7, rate 1/2 convolutional code has coefficients
that grow no faster than� 2 � 3876225 �
k so that provided P2� l � decreases faster than
� 2 � 3876225 �� k the bound above will converge. Since P2� l � � Dl where (for hard decisions)
D� 2 � p� 1� p � the above bound converges for p� 0 � 046. For soft decisions (and additive
white Gaussian noise) D� e� E� N0 and thus the bound converges provided E � N0� � 0 � 6dB.
VIII-31
��
��
Bit error probability
Below we find an upper bound on the error probability for binary convolutional codes. Thegeneralization to nonbinary codes is straightforward.
In order to calculate the bit error probability in decoding between time m and m� 1 we needto consider all paths through the trellis that are not in the all zeros state at either time unit m orm� 1. We also need to realize that not all incorrect paths will cause an error. First consider arate 1 � n code (i.e. k� 1) so each transition from one state to the next is determined by asingle bit. To compute an upper bound on the bit error probability we will do a union boundon all paths that cause a bit error. We assume that the trellis started at t� � ∞. We do this intwo steps. First we look at each path diverging and then remerging to the all zero state. This iscalled an error event. (An error event can only diverge once from the all zero state). Then sumover all possible starting times (times when the path diverges from the all zero state) for eachof these error events. So take a particular error event of length l corresponding to a statesequence with i input ones and j output ones and let Ai � j � l be the number of such paths. If theerror event started at time unit m then that clearly would cause an error since the input bitneed be one upon starting an error event (diverging from the all zero state). However, if theevent ended at time unit m� 1 in the all zero state then there would not be a bit error madesince remerging to the all zero state corresponds to an input bit of 0. Of the l phases that
VIII-32

��
��
overlap with the transition from m to m� 1 there are exactly i of these that will cause a biterror. So for each error event we need to weight the probability by the number of input onesthat are on that path. Thus the bit error probability (for k� 1) can be upper bounded by
Pb� ∑i � j � l iAi � j � lP2� j �
where P2� j � is the probability of error between two codewords that differ in j positions. Asbefore, this bound is independent of the time index m since we have included all paths as ifthe trellis started at t� � ∞ and goes on to t� � ∞.
If we define the weight enumerator polynomial for a convolutional code as
A� x � y � z � � ∑i � j � l Ai � j � lxiy jzl
and upper bound P2� j � using the Chernoff or Bhattacharyya bound by D j then the upperbound on first event error probability is just
Pf� E � � A� x � y � z � � x� 1 � y� D � z� 1
Similarly the bit error probability can be further upper bounded by
Pb�
∂A� x � y � z �
∂x � x� 1 � y� D � z� 1
VIII-33
��
��
As mentioned previously the above bounds may be larger than one (for small signal-to-noise
ratio or high cross over probability). This will happen for a larger range of parameters when
we use the generating function with the Bhattacharyya bound as opposed to just the union
bound. There is a way for certain codes to use just the union bound for the first say L terms
and the Bhattacharyya bound for remaining to get a tighter bound than the bound based on the
generating function but without the infinite computation required for just the union bound.
(See some problem). The above bounds only are finite for a certain range of the parameter D
depending on the specific code. However for practical codes and reasonable signal-to-noise
ratios or crossover probabilities the above bounds are finite. (See another problem).
VIII-34
��
��
Rate k � n codes
Now consider a rate k � n convolutional code. The trellis for such a code has 2k branchesemerging from each state. We will consider the bit error probability for the r-th bit in each k
bit input sequence. Let Ai1 �� � � � ik � j � l be the number of paths through the trellis with j outputones, length l, ir input ones in the r-th input bit (1� r� k) of the sequence of k bit inputs.Then clearly
Ai � j � l� ∑i1 �� � � � ik :∑k
r� 1 ir� i
Ai1 �� � � � ik � j � lThe bit error probability for the r-th bit is then bounded by
Pb � r� ∑i1 �� � � � ik � j � l irAi1 �� � � � ik � j � lP2� j �
The average bit error probability is
Pb� 1k
k
∑r� 1
Pb � r� 1k
k
∑r� 1
∑i1 �� � � � ik � j � l irAi1 �� � � � ik � j � lP2� j �
Pb�
1k ∑
j � l P2� j � ∑i1 �� � � � ik
k
∑r� 1
irAi1 �� � � � ik � j � lVIII-35
��
��
Pb�
1k ∑
j � l P2� j � ∑i1 �� � � � ik Ai1 �� � � � ik � j � l k
∑r� 1
ir
Now consider the last two sums.
∑i1 �� � � � ik�
k
∑r� 1
ir � Ai1 �� � � � ik � j � l � ∑i
∑i1 �� � � � ik :∑ ir� i
�
k
∑r� 1
ir � Ai1 �� � � � ik � j � l
� ∑i
∑i1 �� � � � ik :∑ ir� i
� i � Ai1 �� � � � ik � j � l
� ∑i
i ∑i1 �� � � � ik :∑ ir� i
Ai1 �� � � � ik � j � l
� ∑i
iAi � j � lThus
Pb�
1k ∑
i � j � l iAi � j � lP2� j � �
We can write this as
Pb�
1k ∑
j
w jP2� j � �VIII-36
��
��
where
w j� ∑i � l iAi � j � l
VIII-37
��
��
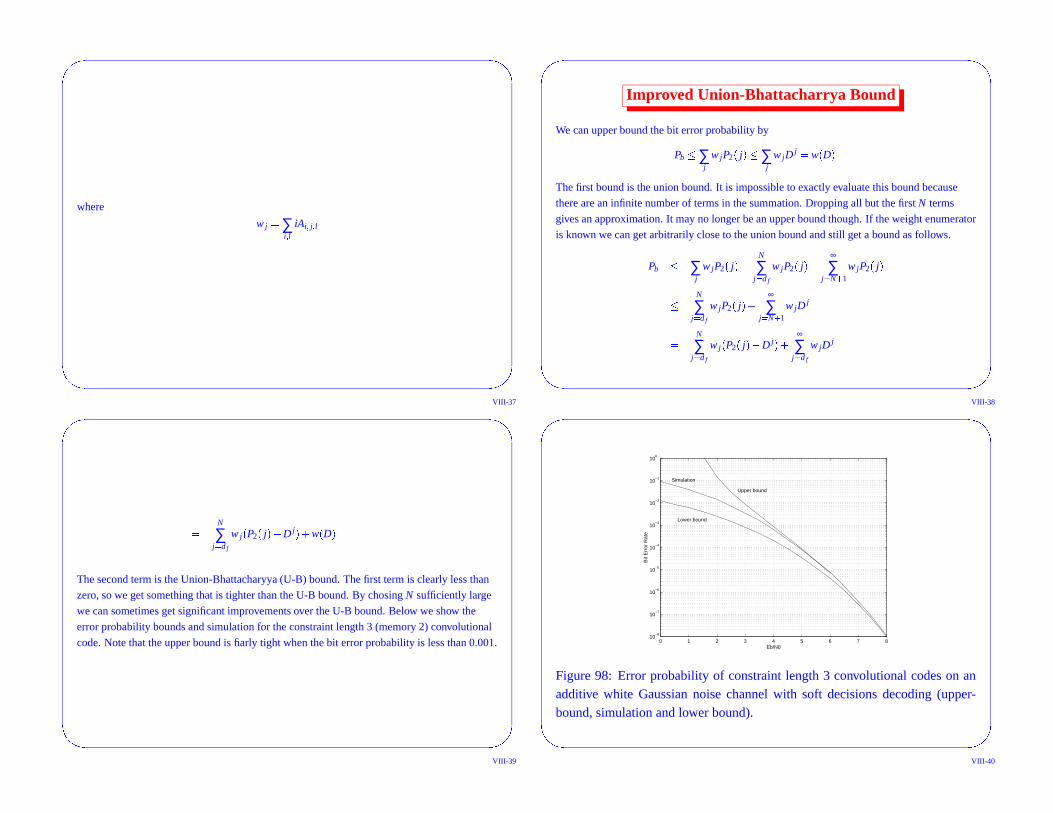
Improved Union-Bhattacharrya Bound
We can upper bound the bit error probability by
Pb� ∑j
w jP2� j �� ∑j
w jDj� w� D �
The first bound is the union bound. It is impossible to exactly evaluate this bound because
there are an infinite number of terms in the summation. Dropping all but the first N terms
gives an approximation. It may no longer be an upper bound though. If the weight enumerator
is known we can get arbitrarily close to the union bound and still get a bound as follows.
Pb � ∑j
w jP2� j � � N
∑j� d f
w jP2� j � � ∞
∑j� N � 1
w jP2� j �
�
N
∑j� d f
w jP2� j � � ∞
∑j� N � 1
w jDj
� N
∑j� d f
w j� P2� j � � D j
� � ∞
∑j� d f
w jDj
VIII-38
��
��
� N
∑j� d f
w j� P2� j � � D j
� � w� D �
The second term is the Union-Bhattacharyya (U-B) bound. The first term is clearly less than
zero, so we get something that is tighter than the U-B bound. By chosing N sufficiently large
we can sometimes get significant improvements over the U-B bound. Below we show the
error probability bounds and simulation for the constraint length 3 (memory 2) convolutional
code. Note that the upper bound is fiarly tight when the bit error probability is less than 0.001.
VIII-39
��
��
0 1 2 3 4 5 6 7 810
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eb/N0B
it E
rror
Rat
e
Upper bound
Simulation
Lower bound
Figure 98: Error probability of constraint length 3 convolutional codes on anadditive white Gaussian noise channel with soft decisions decoding (upper-bound, simulation and lower bound).
VIII-40
��
��
0 1 2 3 4 5 610
−6
10−5
10−4
10−3
10−2
10−1
100
Eb/N
0
Pb
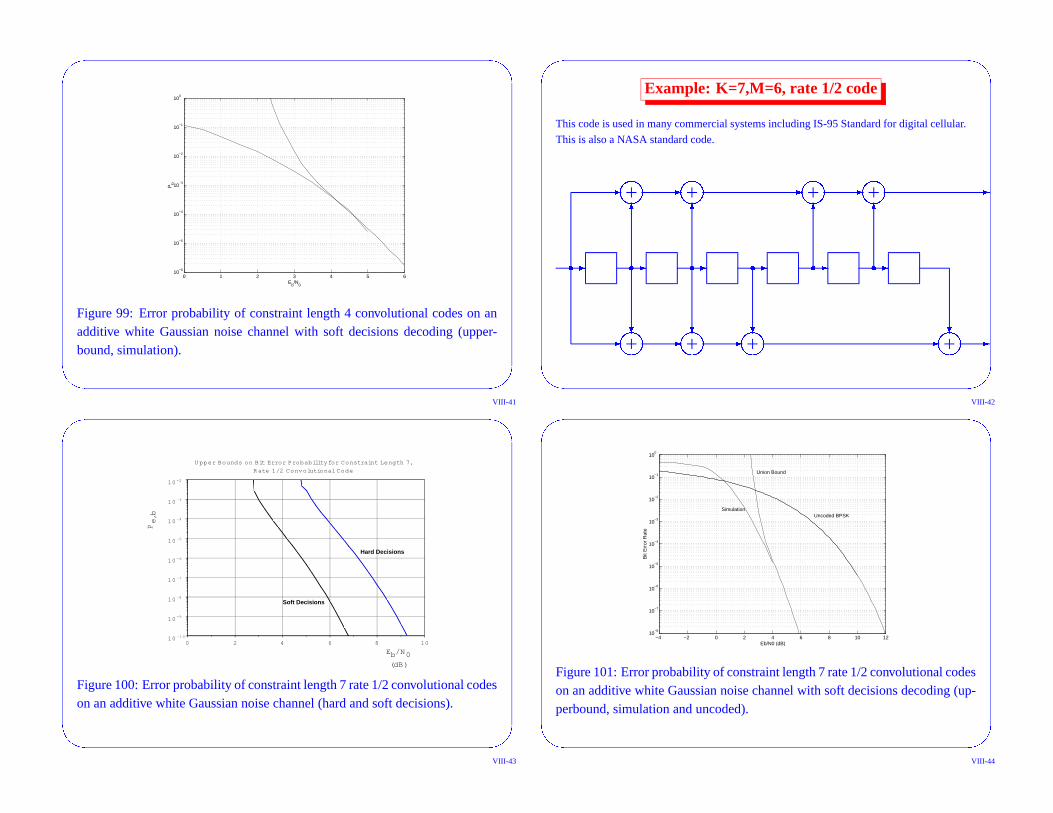
Figure 99: Error probability of constraint length 4 convolutional codes on anadditive white Gaussian noise channel with soft decisions decoding (upper-bound, simulation).
VIII-41
��
��
Example: K=7,M=6, rate 1/2 code
This code is used in many commercial systems including IS-95 Standard for digital cellular.
This is also a NASA standard code.
� � � � � �
�� ��� �� � � � �� ��� �� ��� �
� ���� � �� � � � �� � � � ���� �
� � � � � �
VIII-42
��
��
108642010 -10
10 -9
10 -8
10 -7
10 -6
10 -5
10 -4
10 -3
10 -2
U pper Bounds on Bit Error Probabilityfor Constraint Length 7,
R ate 1/2 Convolutional Code
Eb/N0
(dB)
Pe,b
Hard Decisions
Soft Decisions
Figure 100: Error probability of constraint length 7 rate 1/2 convolutional codeson an additive white Gaussian noise channel (hard and soft decisions).
VIII-43
��
��
−4 −2 0 2 4 6 8 10 1210
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Eb/N0 (dB)B
it E
rror
Rat
e
Simulation
Union Bound
Uncoded BPSK
Figure 101: Error probability of constraint length 7 rate 1/2 convolutional codeson an additive white Gaussian noise channel with soft decisions decoding (up-perbound, simulation and uncoded).
VIII-44
��
��
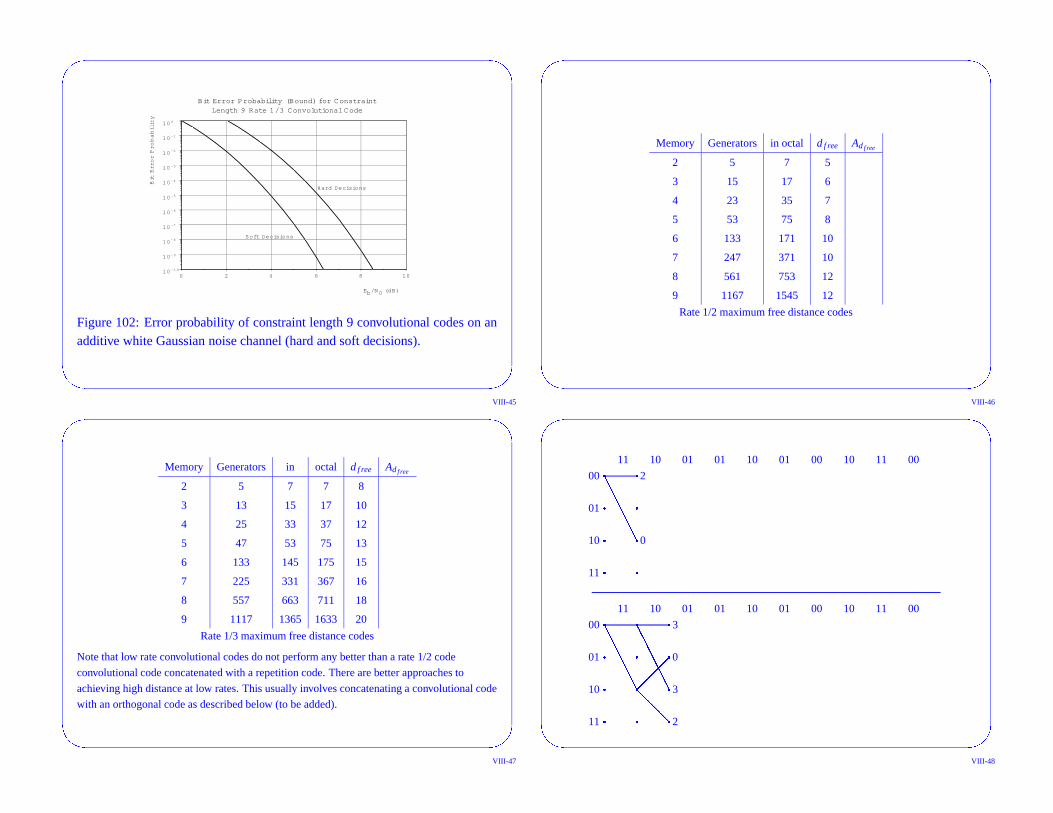
Bit Error Probability (Bound) for Constraint Length 9 Rate 1/3 Convolutional Code
Eb/N 0 (dB)
Bit Error Probability
108642010 -10
10 -9
10 -8
10 -7
10 -6
10 -5
10 -4
10 -3
10 -2
10 -1
10 0
Hard Decisions
Soft Decisions
Figure 102: Error probability of constraint length 9 convolutional codes on anadditive white Gaussian noise channel (hard and soft decisions).
VIII-45
��
��
Memory Generators in octal d f ree Ad f ree
2 5 7 5
3 15 17 6
4 23 35 7
5 53 75 8
6 133 171 10
7 247 371 10
8 561 753 12
9 1167 1545 12
Rate 1/2 maximum free distance codes
VIII-46
��
��
Memory Generators in octal d f ree Ad f ree
2 5 7 7 8
3 13 15 17 10
4 25 33 37 12
5 47 53 75 13
6 133 145 175 15
7 225 331 367 16
8 557 663 711 18
9 1117 1365 1633 20
Rate 1/3 maximum free distance codes
Note that low rate convolutional codes do not perform any better than a rate 1/2 code
convolutional code concatenated with a repetition code. There are better approaches to
achieving high distance at low rates. This usually involves concatenating a convolutional code
with an orthogonal code as described below (to be added).
VIII-47
��
��
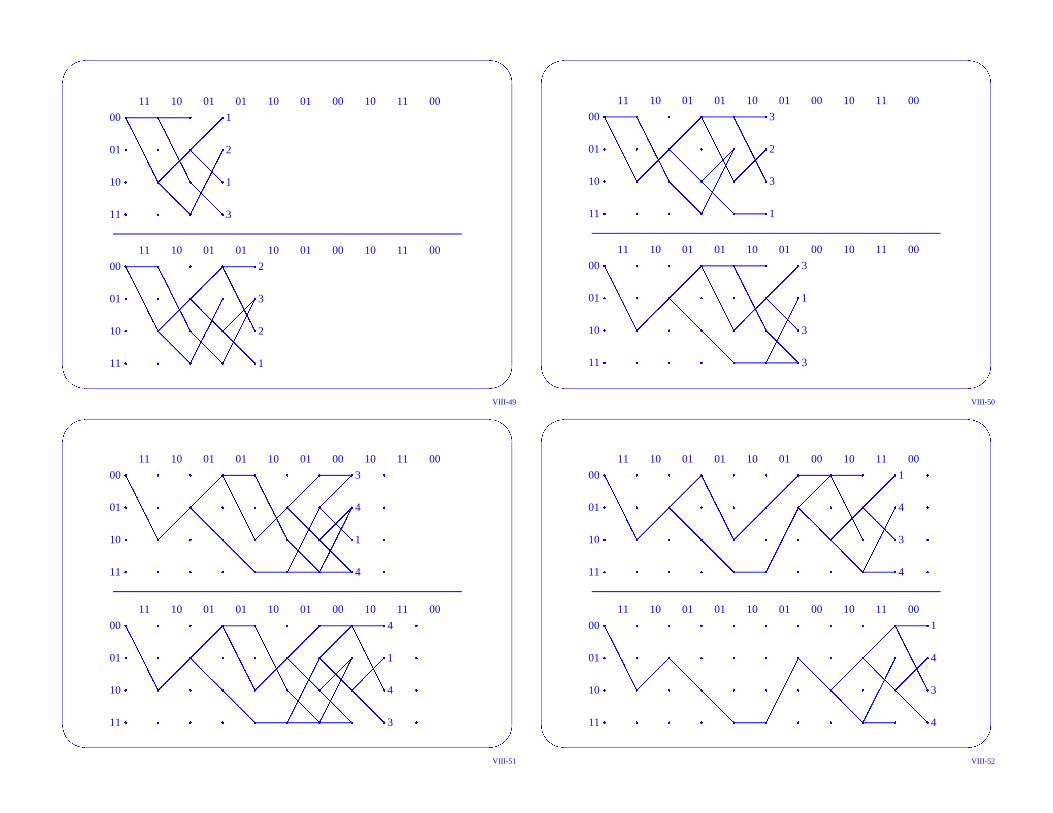
11 10 01 01 10 01 00 10 11 00
��
��
��
��
11
10
01
00
��
��
��
2
0
11 10 01 01 10 01 00 10 11 00�
��
�
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
2
3
0
3
VIII-48
��
��
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
11
10
01
00�
��
��
� ��
�
��
�
��
��
��
��
��
��
��
�
��
�
��
�3
1
2
1
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
��
��
��
��
�
��
�
��
��
��
��
�
��
�
��
�
��
��
��
1
2
3
2
VIII-49
��
��
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
��
��
��
�
��
�
��
��
��
��
�
��
�
��
�
��
��
�� �
��
��
��
��
1
3
2
3
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
��
��
�� �
��
��
��
��
��
��
��
��
�
��
�
��
�
3
3
1
3
VIII-50
��
��
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
��
��
�� �
��
��
��
��
��
��
��
��
�
��
�
��
��
��
��
�
��
�
��
�
��
�
��
�
4
1
4
3
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
��
��
�� �
��
��
��
��
��
��
��
��
�
��
�
��
��
��
��
�
��
�
��
�
��
�
��
��
��
��
�
��
��
��
3
4
1
4
VIII-51
��
��
11 10 01 01 10 01 00 10 11 00
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
��
��
�
��
��
��
��
��
�� �
��
��
��
��
��
��
��
��
��
��
��
�
��
��
��
��
��
��
��
�
��
�
4
3
4
1
11 10 01 01 10 01 00 10 11 00�
��
�
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
11
10
01
00
��
��
�� �
�� �
��
��
� ��
��
�� �
��
��
�
��
��
��
��
�
��
�
��
� ��
�
��
�
��
��
��
4
3
4
1
VIII-52

��
��
Error Bounds for Convolutional Codes
The performance of convolutional codes can be upper bounded by
Pb�
∞
∑l� d f ree
wlDl
where wl is the average number of nonzero information bits on paths with Hamming distance
l and D is a parameter that depends only on the channel. usually the summation in the upper
bound is truncated to some finite number of terms. Example 1. Binary Symmetric Channel
crossover probability p.
D� 2 � p� 1� p �
Example 2. Additive White Gaussian Noise channel
D� e
� E� N0 �Performance Examples: Generally hard decisions requires 2dB more signal energy than soft
decisions for the same bit error probability. Also soft decisions is only about 0.25dB better
than 8 level quantization.
VIII-53
��
��
Standard codes:
Example Convolutional Code 1:
Constraint length 7, memory 6, 64 state decoder, rate 1/2 has the following upper bound.
Pb� 36D10� 211D12� 1404D14� 11633D16� � � �
There is a chip made by Qualcomm and Stanford Telecommunications that operates at data
rates on the order of 10Mbits/second that will do encoding and decoding.
Example Convolutional Code 2: Constraint length 9, memory 8, 256 state decoder, rate 1/2
Pb� 33D12� 281D14� 2179D16� 15035D18� � � �
Example Convolutional Code 3: Constraint length 9, memory 8, 256 state decoder, rate 1/3
Pb� 11D18� 32D20� 195D22� 564D24� 1473D26� � � �
VIII-54
��
��
Trellis
VIII-55
��
��
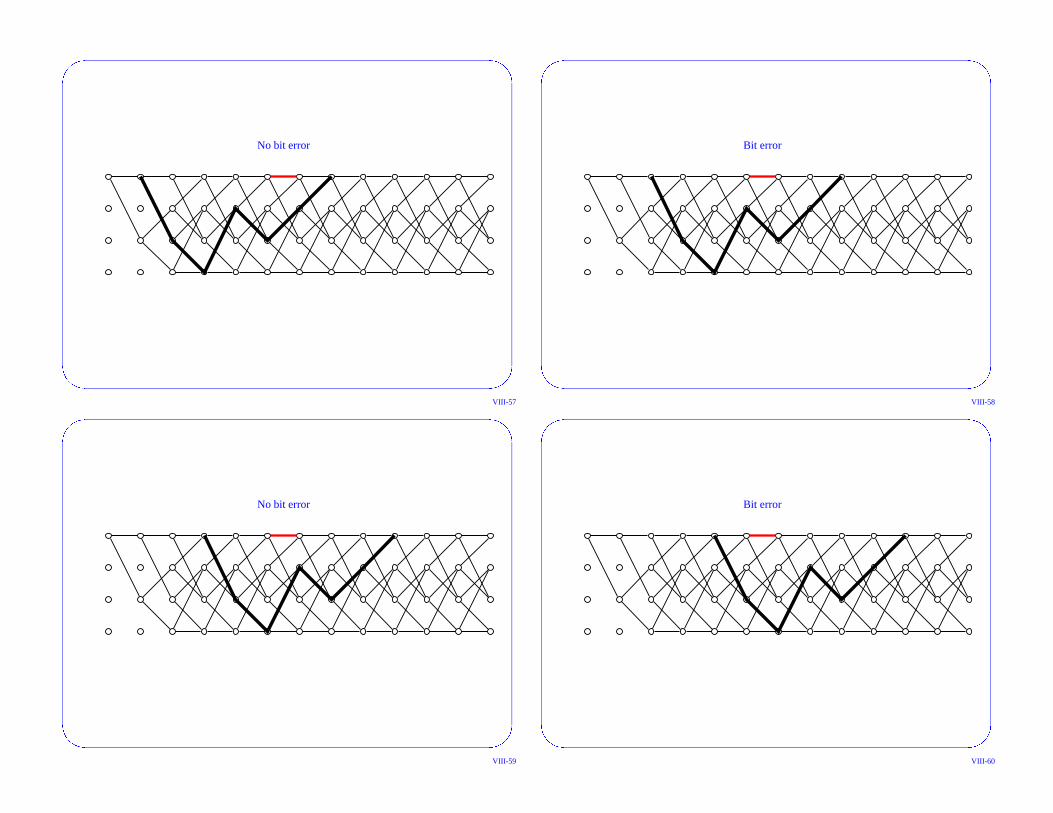
No bit error
VIII-56
��
��
No bit error
VIII-57
��
��
Bit error
VIII-58
��
��
No bit error
VIII-59
��
��
Bit error
VIII-60
��
��
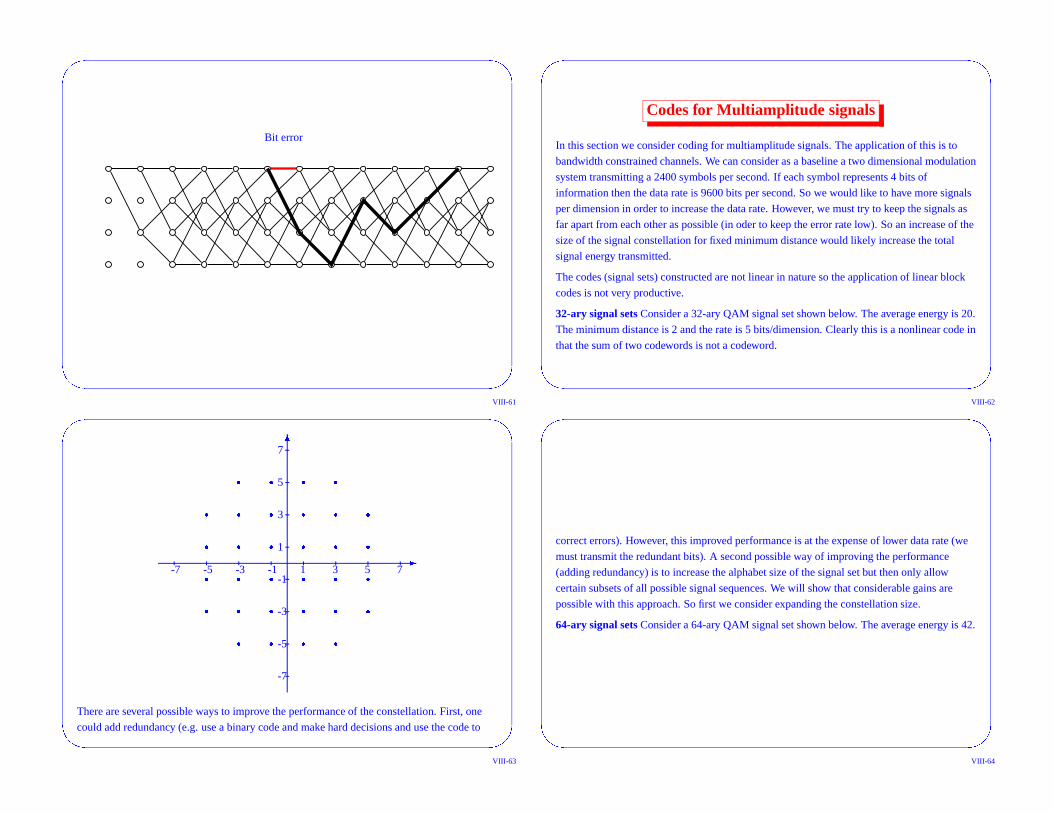
Bit error
VIII-61
��
��
Codes for Multiamplitude signals
In this section we consider coding for multiamplitude signals. The application of this is to
bandwidth constrained channels. We can consider as a baseline a two dimensional modulation
system transmitting a 2400 symbols per second. If each symbol represents 4 bits of
information then the data rate is 9600 bits per second. So we would like to have more signals
per dimension in order to increase the data rate. However, we must try to keep the signals as
far apart from each other as possible (in oder to keep the error rate low). So an increase of the
size of the signal constellation for fixed minimum distance would likely increase the total
signal energy transmitted.
The codes (signal sets) constructed are not linear in nature so the application of linear block
codes is not very productive.
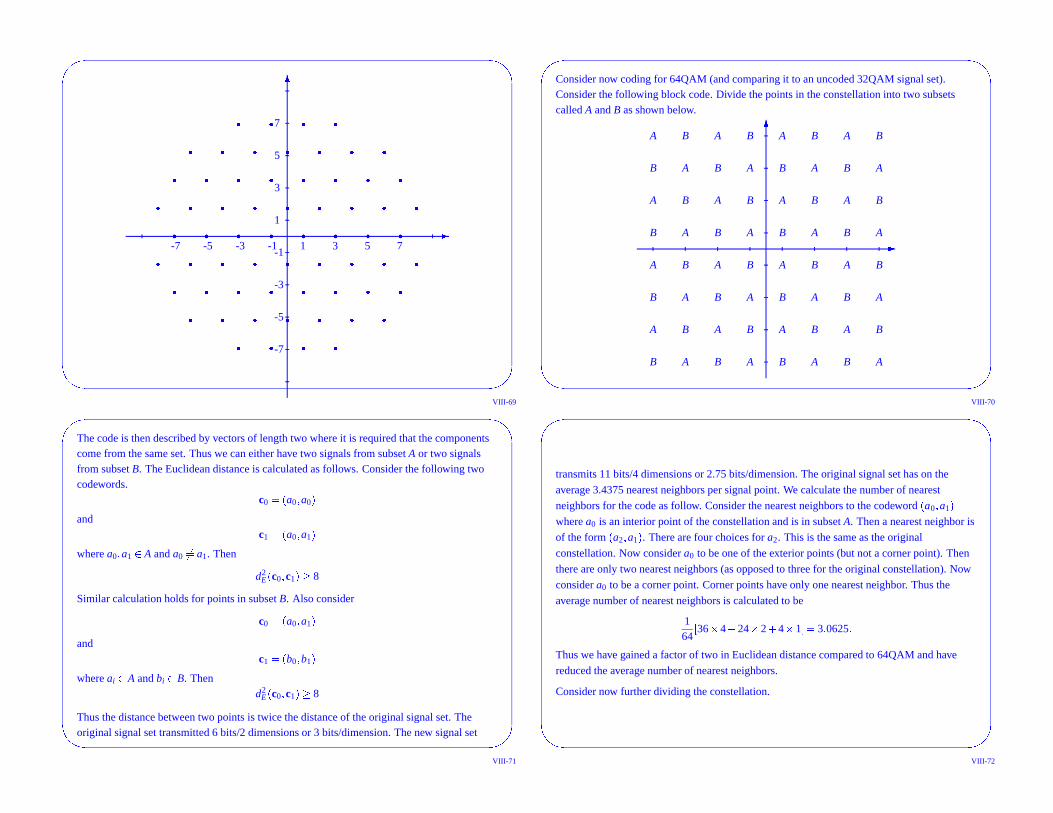
32-ary signal sets Consider a 32-ary QAM signal set shown below. The average energy is 20.
The minimum distance is 2 and the rate is 5 bits/dimension. Clearly this is a nonlinear code in
that the sum of two codewords is not a codeword.
VIII-62
��
��
�
�� � � �
� � � � � �
� � � � � �
� � � � � �
� � � � � �
� � � �
-7 -5 -3 -1 1 3 5 7
-7
-5
-3
-1
1
3
5
7
There are several possible ways to improve the performance of the constellation. First, one
could add redundancy (e.g. use a binary code and make hard decisions and use the code to
VIII-63
��
��
correct errors). However, this improved performance is at the expense of lower data rate (we
must transmit the redundant bits). A second possible way of improving the performance
(adding redundancy) is to increase the alphabet size of the signal set but then only allow
certain subsets of all possible signal sequences. We will show that considerable gains are
possible with this approach. So first we consider expanding the constellation size.
64-ary signal sets Consider a 64-ary QAM signal set shown below. The average energy is 42.
VIII-64
��
��
�
�
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
-7 -5 -3 -1 1 3 5 7
-7
-5
-3
-1
1
3
5
7
VIII-65
��
��
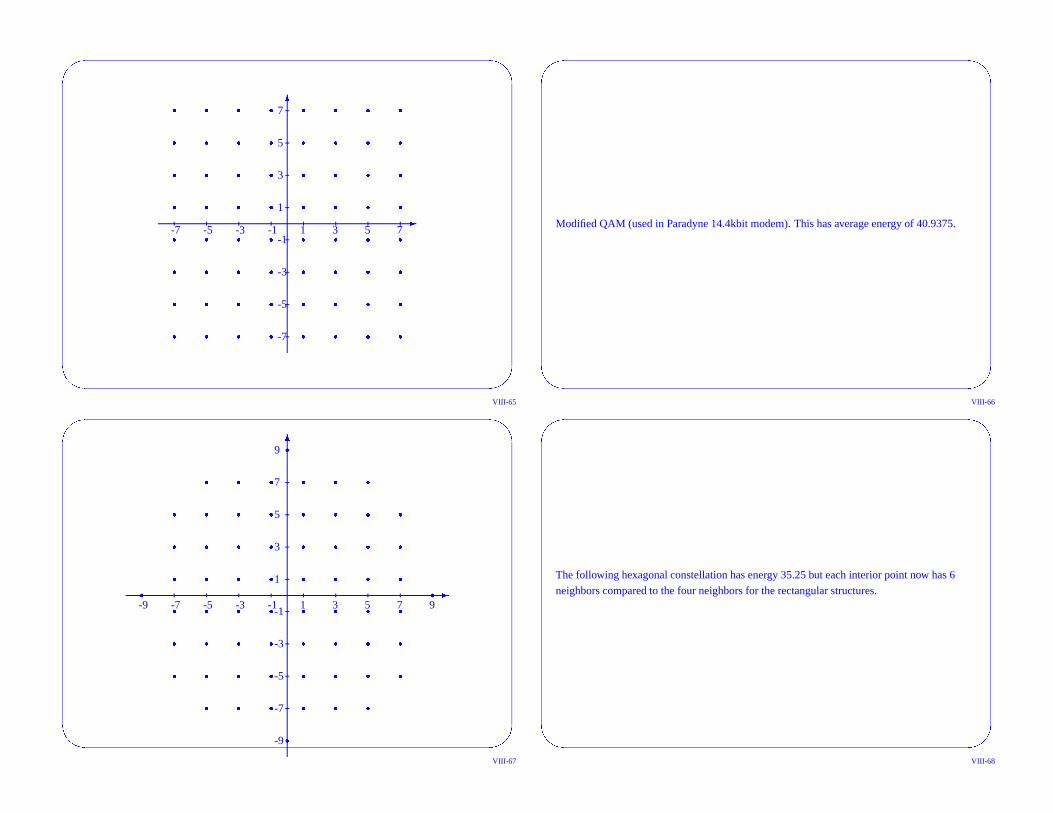
Modified QAM (used in Paradyne 14.4kbit modem). This has average energy of 40.9375.
VIII-66
��
��
�
�
� � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � � � �
� � � � � �
� �
��
-9 -7 -5 -3 -1 1 3 5 7 9
-9
-7
-5
-3
-1
1
3
5
7
9
VIII-67
��
��
The following hexagonal constellation has energy 35.25 but each interior point now has 6
neighbors compared to the four neighbors for the rectangular structures.
VIII-68
��
��
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
-7 -5 -3 -1 1 3 5 7
-7
-5
-3
-1
1
3
5
7
VIII-69
��
��
Consider now coding for 64QAM (and comparing it to an uncoded 32QAM signal set).Consider the following block code. Divide the points in the constellation into two subsetscalled A and B as shown below.
�
�
B B B BA A A A
A A A AB B B B
B B B BA A A A
A A A AB B B B
B B B BA A A A
A A A AB B B B
B B B BA A A A
A A A AB B B B
VIII-70
��
��
The code is then described by vectors of length two where it is required that the componentscome from the same set. Thus we can either have two signals from subset A or two signalsfrom subset B. The Euclidean distance is calculated as follows. Consider the following twocodewords.
c0� � a0 � a0 �
andc1� � a0 � a1 �
where a0 � a1� A and a0 �� a1. Then
d2E� c0 � c1 �� 8
Similar calculation holds for points in subset B. Also consider
c0� � a0 � a1 �
andc1� � b0 � b1 �
where ai� A and bi� B. Thend2
E� c0 � c1 �� 8
Thus the distance between two points is twice the distance of the original signal set. Theoriginal signal set transmitted 6 bits/2 dimensions or 3 bits/dimension. The new signal set
VIII-71
��
��
transmits 11 bits/4 dimensions or 2.75 bits/dimension. The original signal set has on the
average 3.4375 nearest neighbors per signal point. We calculate the number of nearest
neighbors for the code as follow. Consider the nearest neighbors to the codeword� a0 � a1 �
where a0 is an interior point of the constellation and is in subset A. Then a nearest neighbor is
of the form� a2 � a1 � . There are four choices for a2. This is the same as the original
constellation. Now consider a0 to be one of the exterior points (but not a corner point). Then
there are only two nearest neighbors (as opposed to three for the original constellation). Now
consider a0 to be a corner point. Corner points have only one nearest neighbor. Thus the
average number of nearest neighbors is calculated to be
164 � 36 � 4� 24 � 2� 4 � 1� � 3 � 0625 �
Thus we have gained a factor of two in Euclidean distance compared to 64QAM and have
reduced the average number of nearest neighbors.
Consider now further dividing the constellation.
VIII-72
��
��
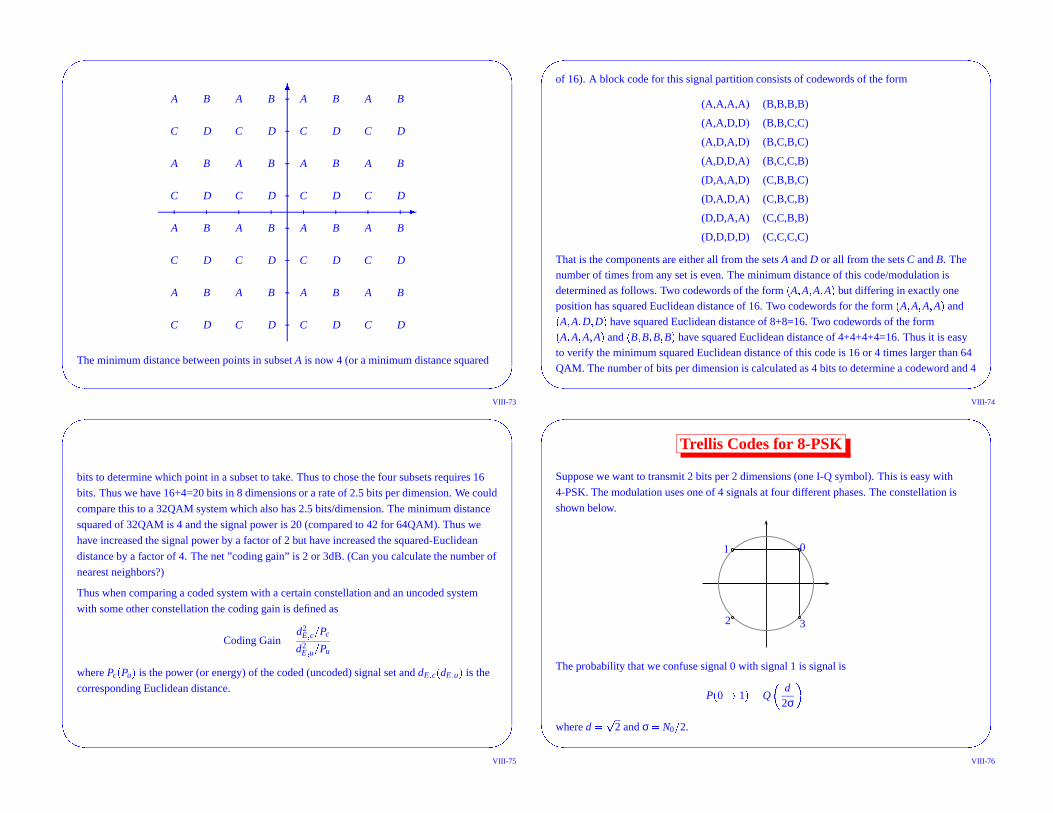
�
�C C C CD D D D
A A A AB B B B
C C C CD D D D
A A A AB B B B
C C C CD D D D
A A A AB B B B
C C C CD D D D
A A A AB B B B
The minimum distance between points in subset A is now 4 (or a minimum distance squared
VIII-73
��
��
of 16). A block code for this signal partition consists of codewords of the form
(A,A,A,A) (B,B,B,B)
(A,A,D,D) (B,B,C,C)
(A,D,A,D) (B,C,B,C)
(A,D,D,A) (B,C,C,B)
(D,A,A,D) (C,B,B,C)
(D,A,D,A) (C,B,C,B)
(D,D,A,A) (C,C,B,B)
(D,D,D,D) (C,C,C,C)
That is the components are either all from the sets A and D or all from the sets C and B. Thenumber of times from any set is even. The minimum distance of this code/modulation isdetermined as follows. Two codewords of the form� A � A � A � A � but differing in exactly oneposition has squared Euclidean distance of 16. Two codewords for the form� A � A � A � A � and
� A � A � D � D � have squared Euclidean distance of 8+8=16. Two codewords of the form
� A � A � A � A � and� B � B � B � B � have squared Euclidean distance of 4+4+4+4=16. Thus it is easyto verify the minimum squared Euclidean distance of this code is 16 or 4 times larger than 64QAM. The number of bits per dimension is calculated as 4 bits to determine a codeword and 4
VIII-74
��
��
bits to determine which point in a subset to take. Thus to chose the four subsets requires 16
bits. Thus we have 16+4=20 bits in 8 dimensions or a rate of 2.5 bits per dimension. We could
compare this to a 32QAM system which also has 2.5 bits/dimension. The minimum distance
squared of 32QAM is 4 and the signal power is 20 (compared to 42 for 64QAM). Thus we
have increased the signal power by a factor of 2 but have increased the squared-Euclidean
distance by a factor of 4. The net ”coding gain” is 2 or 3dB. (Can you calculate the number of
nearest neighbors?)
Thus when comparing a coded system with a certain constellation and an uncoded system
with some other constellation the coding gain is defined as
Coding Gain� d2E � c � Pc
d2E � u � Pu
where Pc� Pu � is the power (or energy) of the coded (uncoded) signal set and dE � c� dE � u � is the
corresponding Euclidean distance.
VIII-75
��
��
Trellis Codes for 8-PSK
Suppose we want to transmit 2 bits per 2 dimensions (one I-Q symbol). This is easy with
4-PSK. The modulation uses one of 4 signals at four different phases. The constellation is
shown below.
01
2 3
The probability that we confuse signal 0 with signal 1 is signal is
P� 0 � 1 � � Q
�
d2σ �
where d� 2 and σ� N0 � 2.
VIII-76
��
��
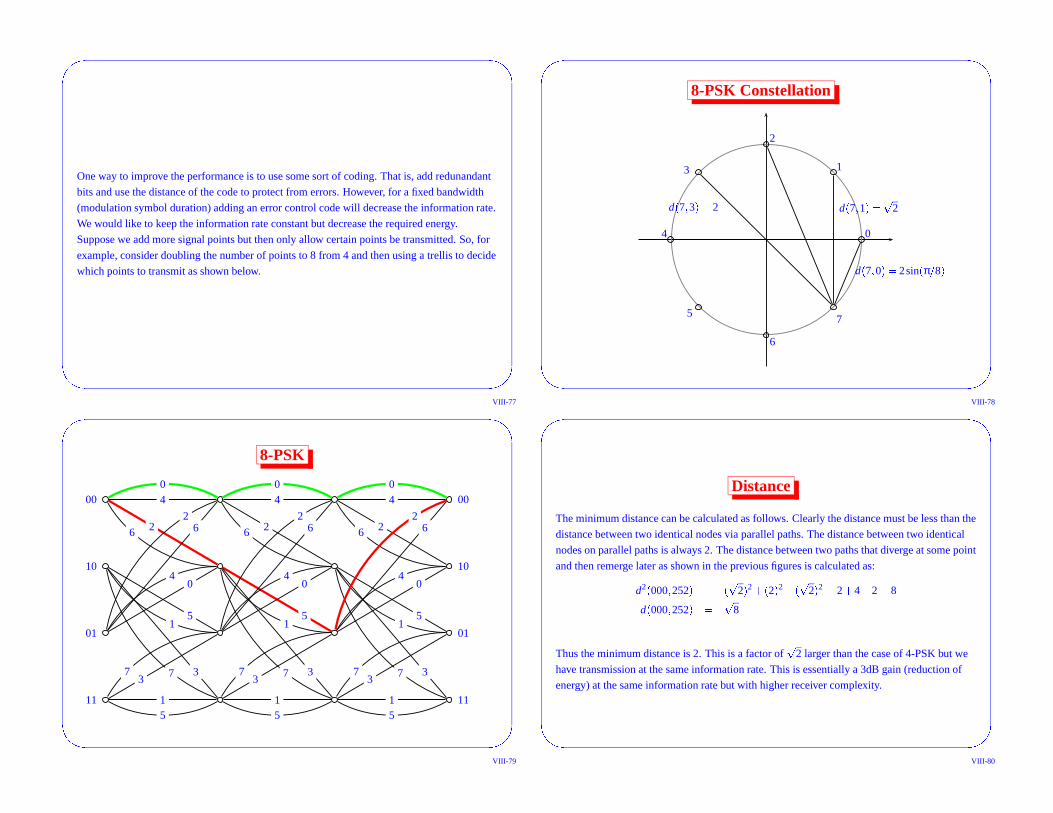
One way to improve the performance is to use some sort of coding. That is, add redunandant
bits and use the distance of the code to protect from errors. However, for a fixed bandwidth
(modulation symbol duration) adding an error control code will decrease the information rate.
We would like to keep the information rate constant but decrease the required energy.
Suppose we add more signal points but then only allow certain points be transmitted. So, for
example, consider doubling the number of points to 8 from 4 and then using a trellis to decide
which points to transmit as shown below.
VIII-77
��
��
8-PSK Constellation
d� 7 � 0 � � 2sin� π � 8 �
d� 7 � 1 � � 2d� 7 � 3 � � 2
0
1
2
3
4
5
6
7
VIII-78
��
��
8-PSK
00
10
01
11
00
10
01
11
40
26
51
37
62
04
37
15
40
26
51
37
62
04
37
15
40
26
51
37
62
04
37
15
VIII-79
��
��
Distance
The minimum distance can be calculated as follows. Clearly the distance must be less than the
distance between two identical nodes via parallel paths. The distance between two identical
nodes on parallel paths is always 2. The distance between two paths that diverge at some point
and then remerge later as shown in the previous figures is calculated as:
d2
� 000 � 252 � � � 2 �
2� � 2 �
2� � 2 �
2� 2� 4� 2� 8
d� 000 � 252 � � 8
Thus the minimum distance is 2. This is a factor of 2 larger than the case of 4-PSK but we
have transmission at the same information rate. This is essentially a 3dB gain (reduction of
energy) at the same information rate but with higher receiver complexity.
VIII-80
��
��
Minimum Bit Error Probability Decoding for Convolutional Codes
Previously we derived the optimal decoder for minimizing the codeword error probability for
a convolutional code. That is minimizing the probability that the decoder chooses the wrong
information sequence. In this section we derive an algorithm for minimizing the probability of
bit error.
Consider a finite state Markov chain with state space � 0 � 1 � � � � � M� 1 � . Let xm be the sequence
of random variables representing the state at time m. Let x0 be the initial state of the process
with� p� x0 � � 1 � and let xJ be the final state. Since this is a Markov process we have that
p� x j � 1 � x j � x j� 1 � � � � � x1 � x0 � � p� x j � 1 � x j �
Let w j� � x j � x j� 1 � be the state transition at time j. There is a one-to-one correspondence
between state sequences and transition sequences. That is the two sequences
x0 � x1 � � � � � xJ w1 � w2 � � � � wJ
contain the same information. Let ulk
� � uk � � � � � ul � denote a sequence. By some mechanism
(e.g. a noisy channel) a noisy version � zm � of the state transition sequence is observed. Based
VIII-81
��
��
on this noisy version of � w j � we wish to determine the following probabilities
p� x j � 1� m � x j� m� � zJ1 �
and
p� x j � 1� m � zJ1 � �
These two quantities can be calculated from
σ j� m� � m � � P � x j� 1� m� � x j� m � zJ1 �
λ j� m � � P � x j� m � zJ1 � �
by appropriate normalization.
p� x j � 1� m � x j� m� � zJ1 � � σ j� m� � m �
∑l � k σ j� l � k �
p� x j � 1� m � zJ1 � � λ j� m �
∑l λ j� l ��
VIII-82
��
��
Now let
α j� m � � P � x j� m � z j1 � β j� m � � P � zJ
j � 1 � x j� m � �
γ j� m� � m � � P � x j� m � z j � x j� 1� m� � �
We can calculate λ j� m � as follows.
λ j� m � � P � zJj � 1 � x j� m � z j
1 � P � x j� m � z j1 �� P � zJ
j � 1 � x j� m � α j� m �� β j� m � α j� m � �
We can calculate σ j� m� � m � as follows.
σ j� m� � m � � P � x j� 1� m� � x j� m � zJ1 �� P � zJ
j � 1 � x j� m � x j� 1� m� � z j1 � P � x j� m � x j� 1� m� � z j
1 �� P � zJj � 1 � x j� m � � P � x j� m � z j � x j� 1� m� � z j� 1
1 � P � x j� 1� m� � z j� 11 �
VIII-83
��
��
� P � zJj � 1 � x j� m � � P � x j� m � z j � x j� 1� m� � P � x j� 1� m� � z j� 1
1 �� β j� m � γ j� m� � m � α j� 1� m� �
We now develop recursions for α j� m � and β j� m � . For j� 0 � 1 � � � � � J we have
α j� m � � P � x j� m � z j1 � �
� M� 1
∑m �� 0
P � x j� 1� m� � x j� m � z j1 �
� M� 1
∑m �� 0
P � x j� m � z j � x j� 1� m� � z j� 11 � P � x j� 1� m� � z j� 1
1 �
� M� 1
∑m �� 0
γ j� m� � m � α j� 1� m� �
The boundary conditions are given as
α0� m � � ��
�
1 � m� 0
0 � m �� 0 �
Here we are assuming the Markov chain starts in state 0 and ends in state 0 at time J
(P � xJ� 0 � � 1).
VIII-84

��
��
The recursion for β j� m � is given as follows.
β j� m � � P � zJj � 1 � x j� m � �
� M� 1
∑m �� 0
P � x j � 1� m� � zJj � 1 � x j� m � �
� M� 1
∑m �� 0
P � zJj � 2 � x j � 1� m� � z j � 1 � x j� m � P � x j � 1� m� � z j � 1 � x j� m � �
� M� 1
∑m �� 0
P � zJj � 2 � x j � 1� m� � P � x j � 1� m� � z j � 1 � x j� m � �
� M� 1
∑m �� 0
β j � 1� m� � γ j � 1� m � m� � �The boundary condition is
βJ� m � � ��
�1 � m� 0
0 � m �� 0 �Finally we can calculate γ j� m� � m � as follows
γ j� m� � m � � P � x j� m � z j � x j� 1� m� �
VIII-85
��
��
� ∑w j
P � x j� m � z j � w j � x j� 1� m� �
� ∑w j
P � z j � x j� m � w j � x j� 1� m� � P � x j� m � w j � x j� 1� m� �
� ∑w j
P � z j � w j � P � w j � x j� m � x j� 1� m� � P � x j� m � x j� 1� m� �
The first term is the transition probability of the channel. The second term is the output of the
encoder when transitioning from state m to state m� . The last term is the probability of going
to state m from state m� . This will be either a nonzero constant (e.g. 1/2) or zero.
The algorithm works as follows. First initialize α and β. After receiving the vector z1 � � � � � zJ
perform the recursion on α and β. Then combine α and β to determine λ and σ. Normalize to
determine the desired probabilities.
VIII-86
��
��
Now consider a convolutional code which is used to transmit information. The input sequenceto the encoder is u1 � � � � � uJ� m � 0 � � � � 0 where m zeros have been appended to the input sequenceto force the encoder to the all zero state at time J. We wish to determine the minimum biterror probability decision rule for bit u j. The input sequence determines a state transitionsequence � x j � j� 0 � � � � � J � . The state sequence determines the output code symbols c1 � � � � � cN .The output symbols are modulated and the received and a decision statistic is derived for eachcoded symbol via a channel p� z � c � . Based on observing r we wish to determine the optimumrule for deciding if u j� 0 or u j� 1. The optimal decision rule is to compute thelog-likelihood ratio and compare that to zero
λ � log
�
p� u j� 0 � z �
p� u j� 1 � z � �
� log
�
∑m � m � :u j� 0 p� x j� m � x j� 1� m� � z �
∑m � m � :u j� 1 p� x j� m � x j� 1� m� � z ��
� log
�
∑m � m � :u j� 0 σ� m � m� �
∑m � m � :u j� 1 σ� m � m� ��
� log
�
∑m � m � :u j� 0 α j� 1� m� � γ j� m� � m � β j� m �
∑m � m � :u j� 1 α j� 1� m� � γ j� m� � m � β j� m ��
VIII-87
��
��
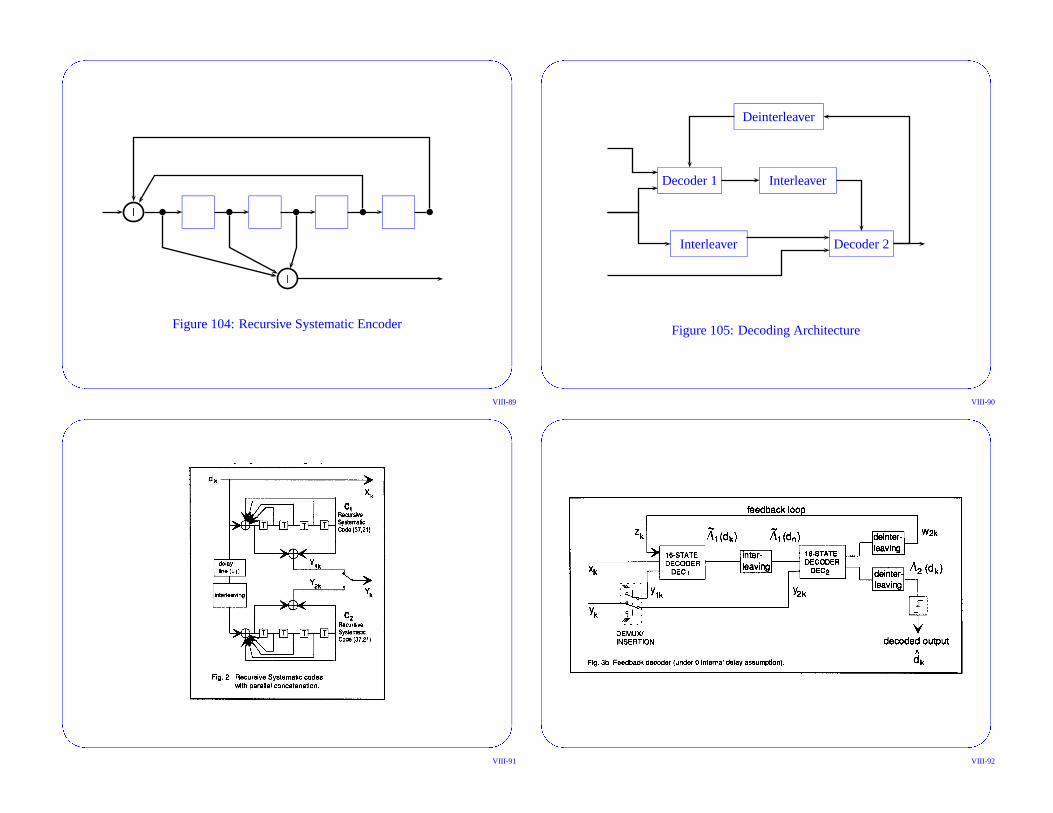
Turbo CodesInformation
RSC1
RSC2
Interleaver
Figure 103: Turbo Code Encoder
VIII-88
��
��
�
�
Figure 104: Recursive Systematic Encoder
VIII-89
��
��
Decoder 1
Decoder 2
Interleaver
Deinterleaver
Interleaver
Figure 105: Decoding Architecture
VIII-90
��
��
VIII-91
��
��
VIII-92
��
��
VIII-93