Embed Size (px)
Citation preview
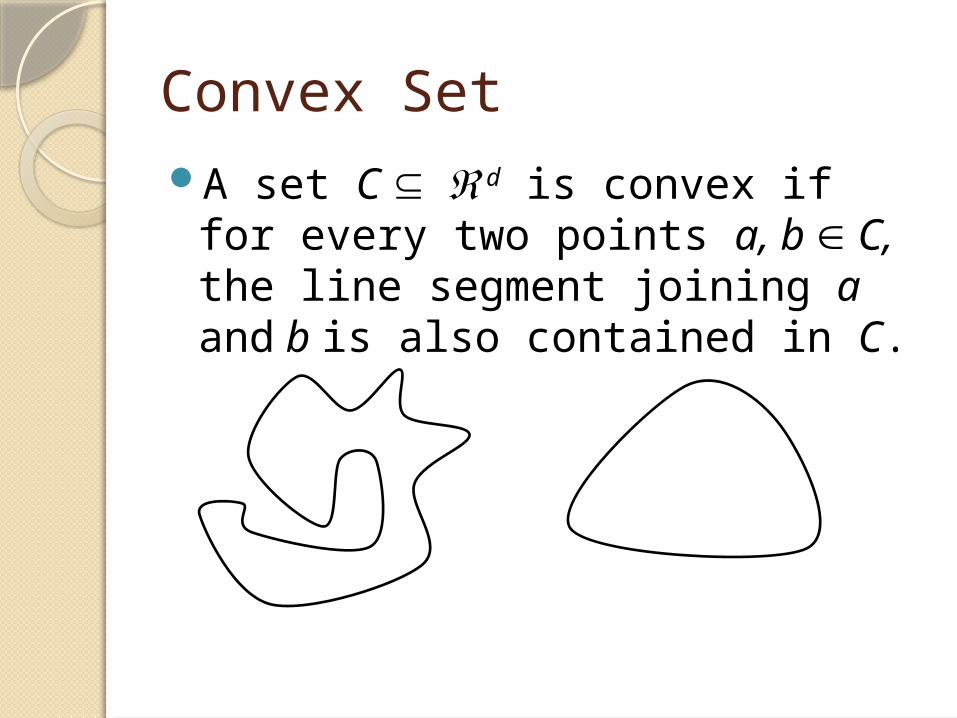
Convex SetA set C
d is convex if for every two points a, b C, the line segment joining a and b is also contained in C.
Convex Set (Contd.)A set C
d is convex if for every two points a, b C, the line segment joining a and b is also contained in C.
A set C d is convex if for every two
points a, b C, and for every t [0, 1], the point t.a + (1- t).b belongs to C.
Are These Two Definitions Equivalent?
Convex hull
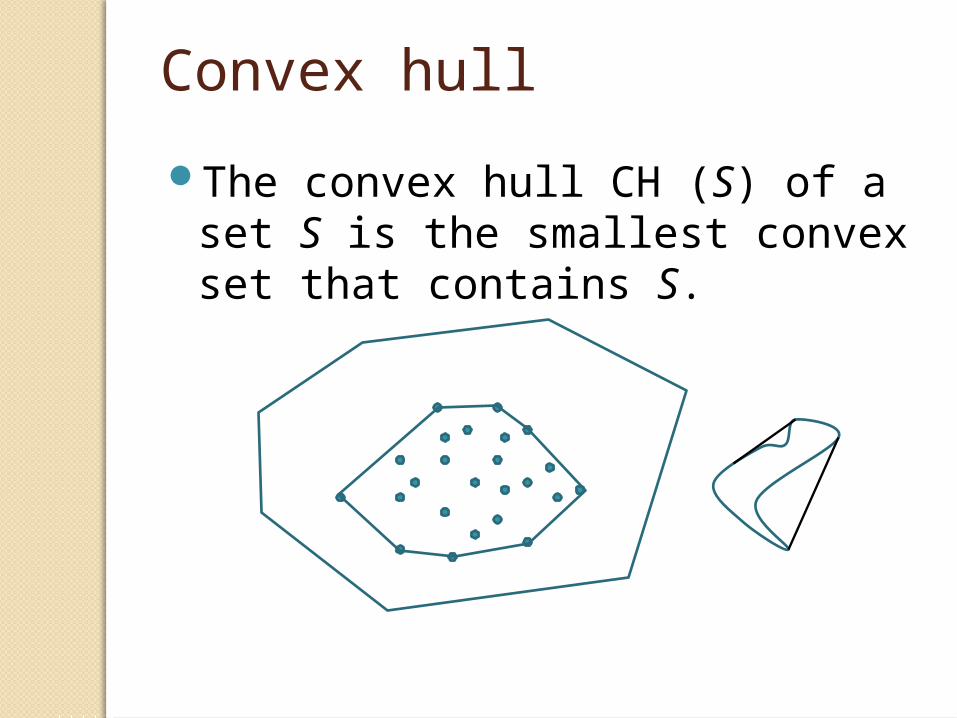
The convex hull CH (S) of a set S is the smallest convex set that contains S.
Convex hull (Contd.)
Intersection of all convex set containing S.
Algebraic Observation:A point a belongs to CH (S) iff
there exist points s1, s2, . . ., sn S, and non-negative real number t1, t2, . . ., tn with i
n ti =1
such that a = in ti.si
=1
=1
Convex hull: Application in optimization
Consider the following Database
Person income expenditure … … …
Queries: Find person having maximum income
Find person whose expenditure is minimum
Find person having maximum savings
Application in optimization (Contd.)
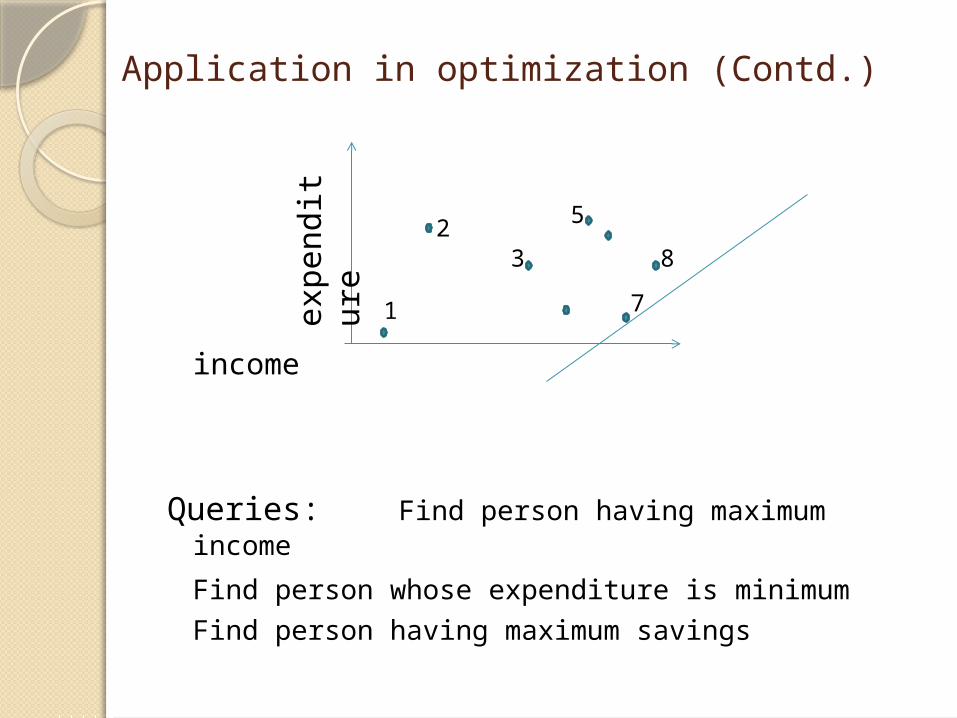
income
Queries: Find person having maximum income
Find person whose expenditure is minimum
Find person having maximum savings
expen
dit
ure 1
23
5
7
8
Linear ProgrammingMaximizing
c1 x1+ c2 x2+ . . .+ cn xn
Subject to a11 x1+ a12 x2+ . . .+ a1n xn ≤ b1
a21 x1+ a22 x2+ . . .+ a2n xn ≤ b2
…
an1 x1+ an2 x2+ . . .+ ann xn ≤ bn
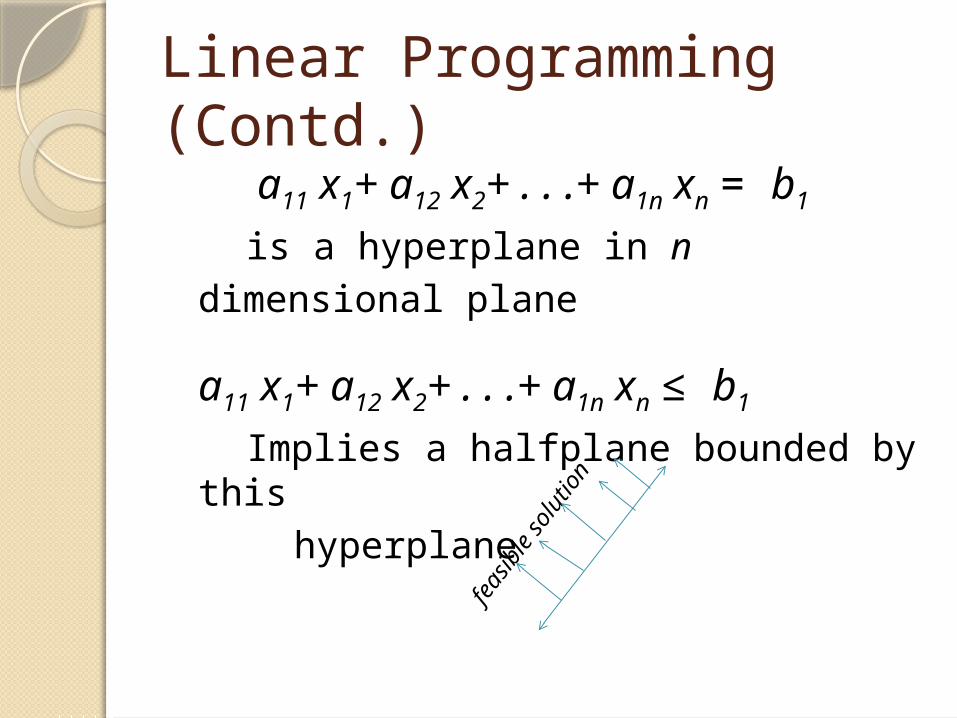
Linear Programming (Contd.)
a11 x1+ a12 x2+ . . .+ a1n xn = b1
is a hyperplane in n dimensional plane
a11 x1+ a12 x2+ . . .+ a1n xn ≤ b1
Implies a halfplane bounded by this
hyperplane
feas
ible
sol
utio
n
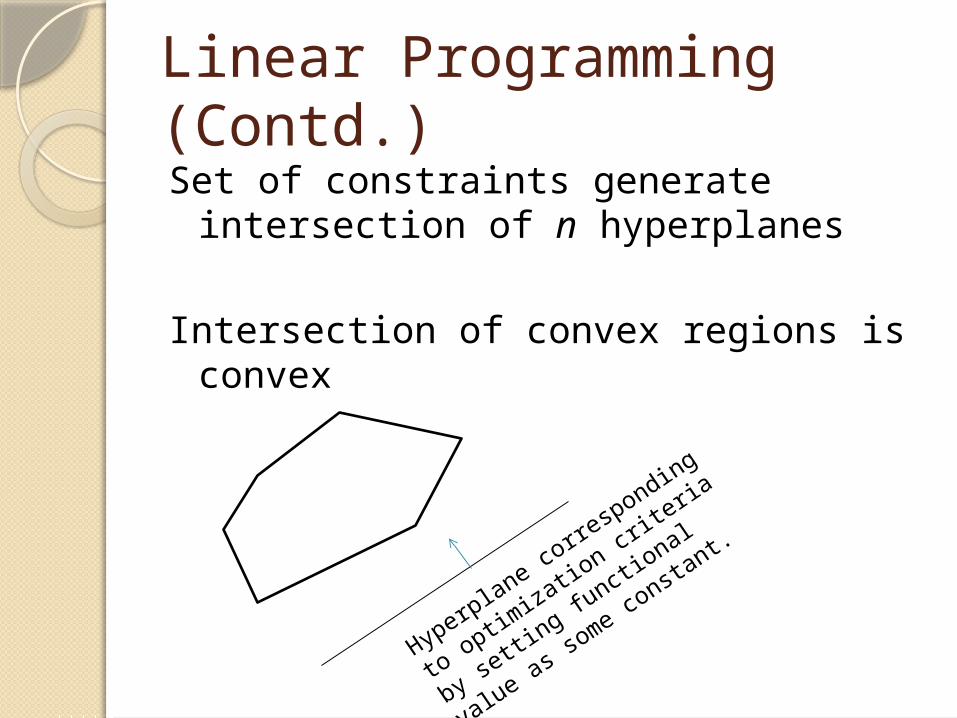
Linear Programming (Contd.)Set of constraints generate intersection of n
hyperplanes
Intersection of convex regions is convex
Hyperplane co
rresp
onding to
optimiza
tion cr
iteria
by setti
ng
functional v
alue as some
consta
nt.
Linear Programming (Contd.)Set of constraints generate intersection of n
hyperplanes
Intersection of convex regions is convex
Intersection region may be empty => no solution
Intersection region may be unbounded => it may generate unbounded optimal solution

Center point
Looking for center point among points arranged on a line.
Have a sense of center point but not clear- Mean ?-Median ?
Center point (Contd.)Observe that
Median say x is such a point where
| # of points on left of x - # of points on right of x| ≤1
We want to extend this idea in 2D
n points in a plane.
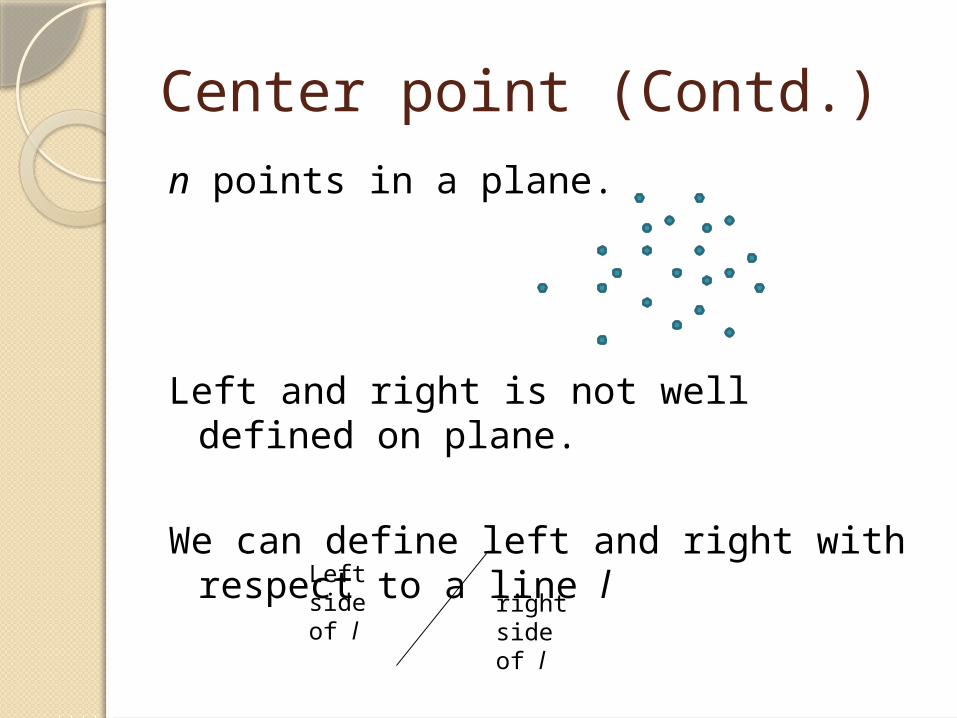
Center point (Contd.)n points in a plane.
Left and right is not well defined on plane.
We can define left and right with respect to a line lLeft
side of l
right side of l
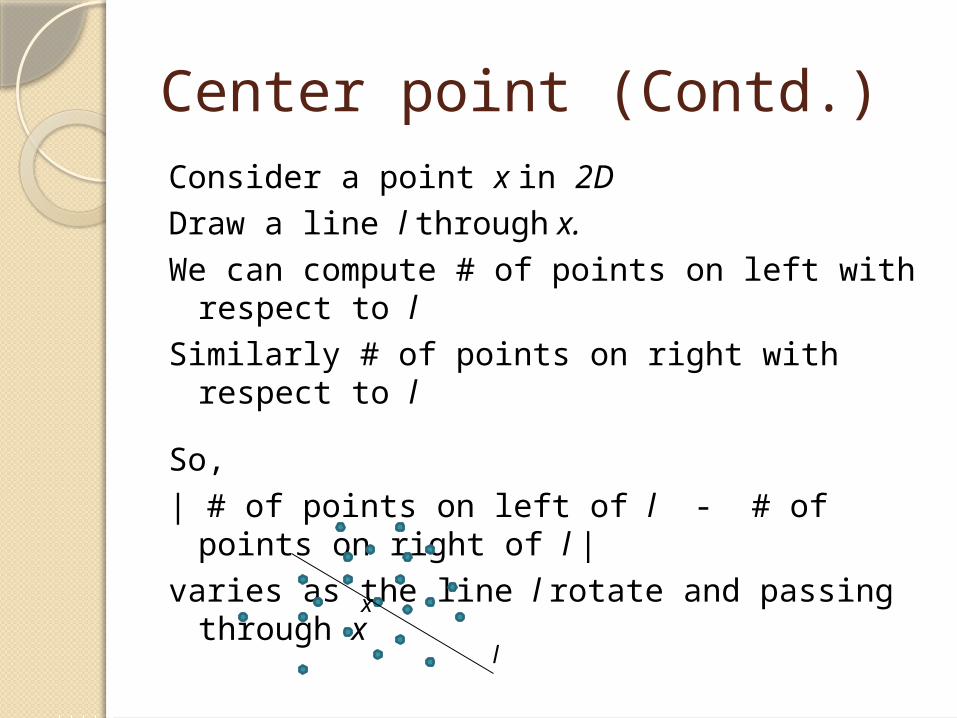
Center point (Contd.)Consider a point x in 2DDraw a line l through x.We can compute # of points on left with
respect to lSimilarly # of points on right with respect to l
So,| # of points on left of l - # of points on right
of l | varies as the line l rotate and passing through x
x
l
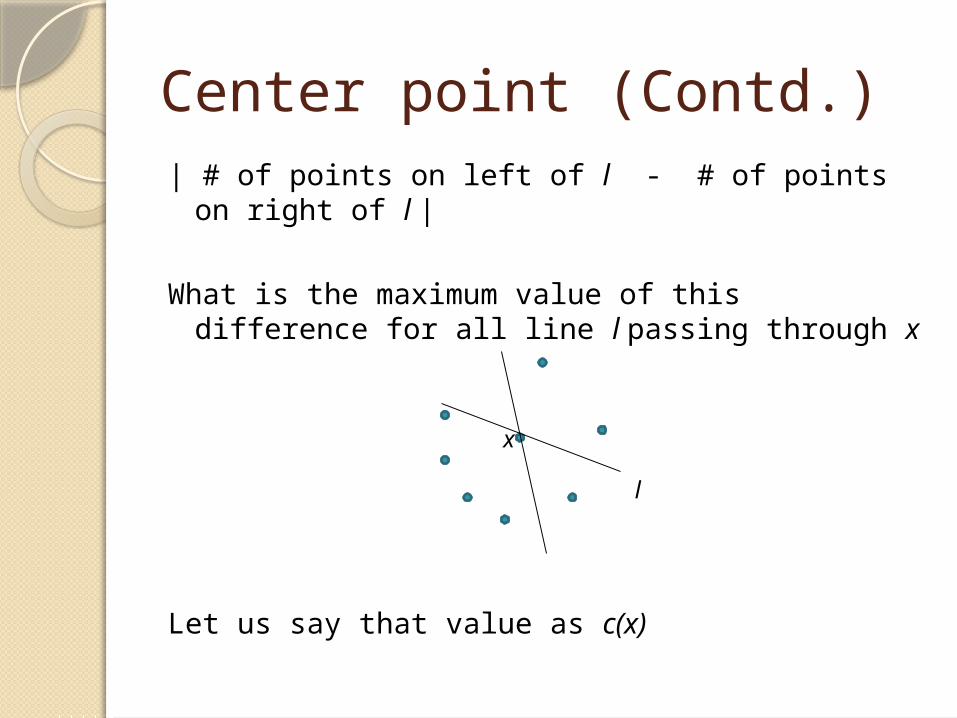
Center point (Contd.)| # of points on left of l - # of points on right of
l |
What is the maximum value of this difference for all line l passing through x
Let us say that value as c(x)
x
l
Center point (Contd.)The term c(x) may be considered as a measure of x for
being a center
Can you identify a point x such that c(x) is less than equal to 1?
x
Center point (Contd.)For any point set
Can you identify a point x such that c(x) is less than equal to 1?
Does such a point always exist?
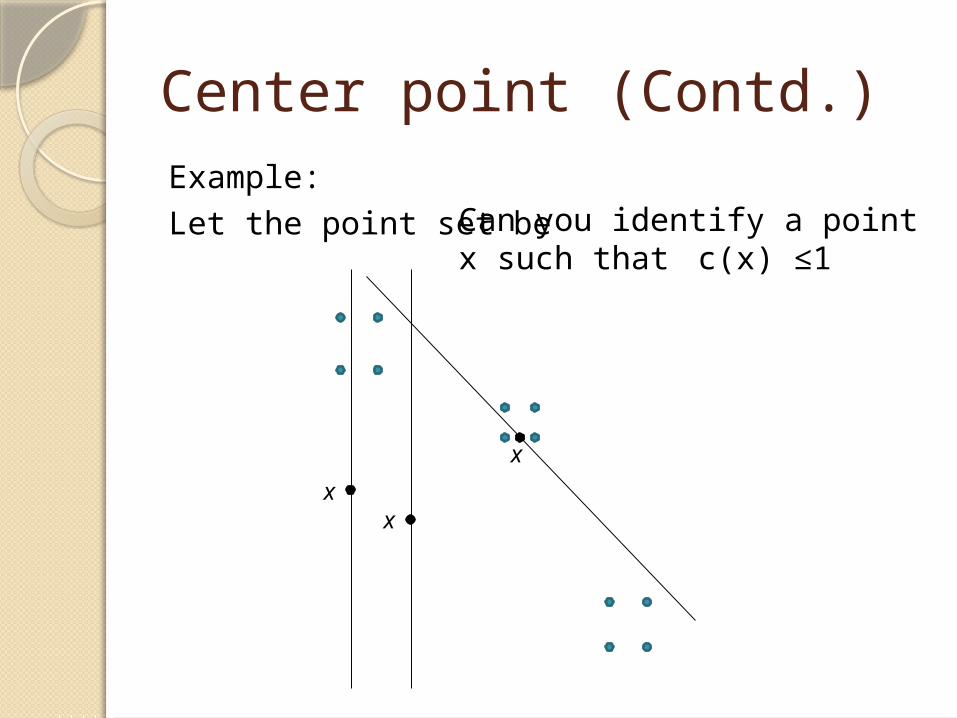
Center point (Contd.)Example:
Let the point set be
xx
x
Can you identify a point x such thatc(x) ≤1
Centerpoint TheoremA point x Rd is called a centerpoint of a point set
if each closed halfspace containing x contains at least n/(d+1) points of the point set.
Theorem: Each finite point set in Rd has at least one centerpoint.
Follows from Helly’s theorem.
Helly’s Theorem
Let C1, C2, …, Cn be convex sets in 2D plane. Suppose that the intersection of every 3 of these sets is nonempty. Then the intersection of all the Ci is nonempty.
Proof of Centerpoint TheoremConsider any point set with n points. Take all convex
set containing at least 2n/3 points.
Number of such convex sets are finite.
Observe that intersection of any three of them is not null
Hence, from Helly’s theorem, intersection of all such convex hull is not null.
Any point on that intersection is the centerpoint.
Algorithm for finding centerpointShreesh Maharaj et al. proposed an excellent algorithm in O(n)
time
Prune and search technique
T(n) = T(c.n) +O(n), 0< c <1
Generate a convex region such that centerpoint region of point set including vertices of convex region is a superset of earlier one
If some vertices of that convex region is discarded centerpoint remains same.
Discard that fraction of boundary points, and continue the process.
Convex independent setA set S Rd is convex independent if all points in S lie
on convex hull of S
That is for every x S, x conv{S\{x}}
Let P be a set of points and the points be in general position.
Any three point subset is convex independent
But any subset of 4 points is not convex independent
Convex independent set (contd.)Suppose the set P contains 5 point
May we always get a subset of size 4 that are convex independent?
Size of convex hull will be either 3, 4 or 5
If the size of convex hull is 5, then … …
Ramsey TheoremG(V, E) is a graph with |V|=6, then either G or Gc
must have a triangle.
So, R(3, 3) = 6
If the number of vertices is sufficiently large, there always exist a k vertex subset Y such the all hyperedge of 4 vertices is in G or in Gc.
Erdös-Szekeres TheoremGiven n points set, color a 4 tuple red if its 4
points are convex independent and blue otherwise.
From Ramsey Theorem, there is a k point subset such that all hyperedge is same color.
But for k ≥ 5, this color cannot be blue.
So, that k point subset is convex independent
Erdös-Szekeres Theorem (Contd.)For every natural number k, there exist a number
n(k) such that any n(k) point set in the plane in general position contains a k-point convex independent subset.
2k-2 + 1 ≤ n(k) ≤ 2k-5Ck-2 - 2
K-HoleLet X be a set of point. A k-point set Y is called a k-hole in
the point set if Y is convex independent and conv(Y) X = Y.
Erdös raised the question about the size of point set for k-hole
3-hole?
4-hole?
5-hole?
6-hole?
7-hole … … Does not exist.
A lot of questions remain unanswered….










![Quantum Isometry Groups: Examples and Computations ...203,B.T.Road,Kolkata700108,India e mails: jyotish r@isical.ac.in, goswamid@isical.ac.in Abstract In this follow-up of [4], where](https://img.pdfslide.us/doc/110x75/6099c26925b1ea23d96118c6/quantum-isometry-groups-examples-and-computations-203btroadkolkata700108india.jpg)