Embed Size (px)
Citation preview

Convergence of Coloring Games with Collusions
and why are your Facebook “friends” not optimal?
Guillaume DucoffeColumbia University
Computer Science DeptNew York, NY, USA
Dorian MazauricColumbia University
Computer Science DeptNew York, NY, USA
Augustin ChaintreauColumbia University
Computer Science DeptNew York, NY, USA
ABSTRACTVarious social networks, and some computational problems,require forming groups in the presence of de facto antago-nistic relationships denoting local incompatibility. This canbe posed as a vertex graph coloring problem, and the config-urations attainable under these constraints through coordi-nated algorithms (e.g., aiming at using the least amount ofcolors) are well characterized. In contrast, when groups areformed in a distributed manner by self-interested nodes, weknow surprisingly little of the configurations that emergefrom the dynamics of such a coloring game. Collusions –multiple players joining a new group together so that theyall improve their scores – are likely to occur in such groupformation settings; they greatly affect the stability and effi-ciency of the configurations.
This paper characterizes the convergence of coloring games,revealing their intricate complexity properties and provingthat previous bounds are arbitrarily loose. First, in a uni-form game, we show that sequences of moves relate to physicsmodels of condensed matter and integer partition. More-over, we prove that combinatorial complexity of coloringgames suddenly increases: no polynomial bound exists when-ever this analysis fails. This solves an open problem andexplains the failure of previous proposed methods using po-tential functions. In non-uniform games where nodes pref-erences are given in a set of weights, we prove generallythe maximum collusion size that guarantees convergence.As we show, deciding the convergence beyond this point isnever computationally feasible. Our results extend to vari-ants where nodes join multiple groups, have asymmetricalweights, and utility goes beyond pairwise relationship. Fi-nally, we show these games create a tension between stabilityand efficiency, as collusions and using multiple colors bothhave a beneficial effect on the price of anarchy.
1. INTRODUCTIONIn many situations, nodes belong to a network that also
contains various conflicts and enmity among its members,or at least a diversity of opinions. In that case, we oftenare required to take sides and form subsets or groups to in-teract with each other. Formal disagreement among nodesover well-defined societal issues (e.g., “Which person shouldlead the executive branch of the government for the next4 years?”) are typically resolved through democratic de-cision process. But disagreement in many networks mostfrequently occurs for less formal topics (e.g., “What con-stitutes a fun evening?”, “Which video clip available onlineis worth the time to watch it?”). Moreover, two persons’
views may differ so radically that they are essentially in-compatible. In retrospect, this situation is so common thatit generally affects how informal groups of social interactionare formed. The formation of social gatherings (e.g., choos-ing your Facebook groups, or choosing which communitiesto actively participate in), is primarily driven by the benefitgained from interacting with each person in these groups.Groups are formed in a distributed manner as outsiders be-come attracted to some of the group’s members. Membersmay potentially revise their decision and vote with their feet,as other groups become more attractive to them.
Understanding how groups form in a social network issimilar to a graph coloring problem. In its simplest ver-sion, colors should be assigned to vertices of a graph so thatedges, which represent conflicts, never connect two peoplein a same-color group. What is unique in our case is that,instead of nodes following a coordinated decision towardsa global objective (e.g., minimizing the number of distinctgroups or colors), individuals more generally make local andselfish decisions, typically at arbitrary time. In essence, so-cial group formation is a coloring game with complex dis-tributed dynamics, and this is the perspective we adopt inthis paper. In particular we account address three aspectsof this problem:
• Players preferences are arbitrary and private.We can assume that nodes decide to join groups ac-cording to a weighted graph that represents their in-terests in other nodes. However, it is neither easy nordesirable to disclose these weights. This is why weaim to prove the convergence of all games under anysequence of local decision.
• Networks include conflict edges. The game ishence played over a graph with edges denoting “posi-tive” and “negative” interaction. As an extreme case,one node may wish to avoid another at all cost. Weinclude all these cases.
• Players participate in collusions. It is frequentlyassumed in game theory that nodes can unilaterallydeviate but cannot act collectively to increase their re-turn. Here, we wish to relax this assumption, since wedeal with how people form groups. Our model detailsthe impact of such collusions on the game’s conver-gence.
Coloring game: Definition, Examples, Properties.We define a coloring game on a general weighted graph as
follows: each edge denotes a potential connection or alliance,

and its weight represents how advantageous this connectionis to both nodes1. Edges with positive weights denote de-sirable connections, while an edge with negative weight, afortiori if the weight is very large, denotes a conflictual re-lationship. A player can strategically decide which color sheuses, knowing that she will then receive a utility which de-pends on the weights of her neighboring edges towards otherplayers picking the same color2. One possible choice is topick a color no-one is currently using, in which case she willbe isolated and by convention will receive a null utility. Inaddition, a subset of players can decide to act collectivelyto form a k-deviation (where k is the size of this subset),by simultaneously changing their colors, as long as each ofthem strictly increases her utility.
Coloring games naturally arise in situations where nodeshave positive and negative relationships, and interact afterforming various factions:
• In the case of an informal social gathering, one candecide to join an online group or community for thesole purpose of being able to interact with its mem-bers, for example to exchange information. However,conflicts are present in the form of persons one wishesto avoid, e.g., an ex-partner, an employer; informationdisclosure might in that case hurt each others’ privacy.
• In Spread Spectrum telecommunications such as CodeDivision Multiple Access (CDMA) wireless networks, agroup of nodes can decide on a coding scheme to com-municate among each other without nodes from othergroups either interfering or being able to eavesdrop oreven easily detect their communication.
• Vendors for multiple goods could consider bundling,which means coupling some products together (e.g., viaproviding additional services such as a loyalty pro-gram, or co-locating shops near to each other in thesame mall). Entering an alliance involves complemen-tarity, which is beneficial but also may be impossiblefor some vendors due to competition.
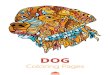
Figure 1 presents an example, where 4 groups of friendsform opposing factions, except for one node in each groupwhich also participates in a larger central clique (weights1 are in green, all other pairs are enemies). The numberinside a node represents its current utility. We focus on thefollowing properties of a coloring game:
• Stability: We say that a configuration is k-stable ifno deviation of at most size k exists. The existence ofsuch configurations is necessary for the game to con-verge when these deviations take place. This condi-tion ensures that groups are self-perpetuating: theirmembers have no incentive to deviate and form newalliances.
In Figure 1, peripheral cliques are self-perpetuatingwhen deviations of at most size 3 are allowed, but theyare unstable under 4-deviations.
1Although we keep weights symmetric for simplicity here,we also present results for the asymmetrical case in whichan alliance is more profitable to one of the nodes (Section 4).2While we mostly focus on the case where the utility is thesum of all these weights, we also present a more general caseusing subsets (see Section 4).
3
1
1
3
1
1
3
11
3
11
2
2
2
2
2
2
2
22
2
22
4-deviation
Total Utility = 24 (socially optimal)stable under 1,2, and 3-deviations
Total Utility = 20 (soc. sub-optimal)stable under all deviations
Figure 1: Example of move in a coloring game.
• Time to converge: When k-stable configurations ex-ist, we also wish to prove that a small number of stepsis needed for the game to converge. Note that nodesare not coordinated and hence we need to bound thelongest sequence of steps before convergence.
For instance, in Figure 1, the longest sequence endingin the 4-stable configuration on the right has at leastone more step than the longest sequence ending to theleft.
• Efficiency: All games that converge end in a configu-ration in which no players can improve their score, buthow does it compare to some optimal choice? One wayto answer this question is to compare the sum of allutilities received by players to the configuration wherethis quantity is maximized.
In Figure 1, the socially optimal configuration is not4-stable, but the right configuration achieves 5
6of it.
Our contribution: the uniform case.In the case where all edges that are not conflicts have
the same unit weight, a player receives a utility equal tothe number of people in her group. One may think that shewishes to join a larger group, but she may be prevented fromdoing so by the presence of a conflict. We prove that thisgame is equivalent to an information sharing game intro-duced in [9]. The authors showed that for small values of k(up to k = 3) any arbitrary sequence of deviations convergesin polynomial time. However, while the mere existence ofa k-stable configuration has been independently establishedfor any k, we still have no understanding of the cost in thenumber of deviations that are required to attain it. Thepotential function method used for k ≤ 3 fails otherwise,primarily because deviations of size 4 can decrease the over-all utility of the game (e.g., Figure 1). A first hint at thedifficulty of this problem is that finding a k stable partitionis NP-hard whenever k is part of the input.
We prove that the longest sequence of steps in a uniformgame can be analyzed in the Dominance Lattice (previouslyintroduced in theoretical physics and combinatorics). Incontrast with potential function methods, it provides newand tight polynomial bounds when such exist. Moreover, amore detailed analysis of these sequences allows us to rig-orously prove the sudden complexity increase occuring atk = 4, as the number of steps in this game admits no poly-nomial bound. It completes the analysis of convergence inthe uniform case.

Our contribution: the general case.Coloring games when weights are non-uniform are far more
difficult to analyze, as no result exists prior to this workthat guarantees even the existence of a k-stable configura-tion. We first generalize the potential method to prove theconvergence in polynomial time for all games when only 1-deviations are allowed. We prove that this extends to 2-deviations whenever all positive weights are equal to 1. Weshow it also provides tight bounds on convergence time.
Remarkably, these two results complete the characteriza-tion of the general case in its entirety: Even with only 3-deviations, conflicts and binary 0-1 weights, we show gamesmay not converge, although their utility never decreases. Allother sets of weights that are neither trivial, nor equivalentto these previously mentioned, admit games that are not2-stable.
Our results again strengthen following a sudden complex-ity increase: for any k ≥ 1, and a fixed set of weights withconflicts, coloring games either are always k stable or it isNP hard to decide which ones are. Hence, the first occurenceof a counter-example always makes the eventual behavior ofa game in general beyond prediction under polynomial.
Our contribution: more general coloring games.We finally extend our results to account for more general
classes of games. First, we show that assuming asymmetri-cal weights or allowing the “gossip” deviation defined in [9]immediately creates instability. Second, we show somewhatcounter-intuitively that allowing nodes to choose multiplecolors, while resolving all our previous counter-examples,makes stability harder to obtain even in the uniform case.Finally, we prove that all our results naturally extend be-yond symmetric pairwise relationships to account for multi-modal interaction in hypergraphs.
We conclude with two results illustrating the tension be-tween stability and efficiency in coloring games. While theprice of anarchy is generally difficult to bound, collusionsand multiple colors per nodes bring natural improvementwhenever the game converges. This complements our anal-ysis by showing that the cases in which convergence is themost difficult to guarantee are also those in which the sys-tem may form better groups overall. It motivates futureresearch to design games operating close but not beyondthe complexity frontier we unveil.
Related work.The work most relevant to coloring games is an informa-
tion sharing model where groups are connected componentsof a graph formed as local edges are opened by peers [9].We already discussed those results in the uniform case, forwhich this game is equivalent to ours. In the general case,the authors provide one counter-example of stability, whichis built around the gossip deviation. In gossip deviation,two nodes are allowed to merge their connected componentsor, equivalently, that the two nodes’ colors become a singlecolor. We analyze games with and without the gossip devi-ation, as we show more generally that the deviation alwaysintroduces instability.
Graph coloring, in which an edge represents such a con-flict, has been the subject of a long tradition of computa-tional research. Similarly, the structure of social networkswith positive and negative edges has been a topic of interestsince the 1950s. A first aspect that sets our results apart
Dynamic of the system
Input: A positive integer k ≥ 1, a set of symmetric weightsW, and a graph G = (V,E,w).
Output: A configuration k-stable for G.
1: Let C0 be the configuration composed of |V | singletonsgroups.
2: Set i = 0.3: while there exists a k-deviation for Ci do4: Set i = i+ 1.5: Compute the configuration Ci after any k-deviation.6: return Configuration Ci.
from previous works is that we consider the individual in-terest of the nodes, instead of attempting to satisfy a globalproperty (e.g., minimizing the number of colors, or avoid-ing structural imbalance created by triangles with exactlytwo positive edges). It is indeed easy to show that graphsthat are structurally balanced are k-stable for any k, butour results apply more generally to characterize any graph.Our work also highlights the importance of accounting forcomplexity, and not only existential results, when analyzingnetworks with positive and negative edges.
This model of group formation is a novel direction. Mostmodels explaining network formation either deal with ensur-ing connectivity [6], or matching [11] under local cost con-straint such as number of edges or queries. Alternatively,they may balance a global risk propagation with rewardsfrom local connections [1]. In contrast, we jointly considerboth the positive and negative aspects of social interactionwithin the same graph. This mirrors the situation manyusers face online when balancing privacy with utility. Thistopic, one of fundamental importance to the design of so-cial networking software (see e.g., [7]) was previously un-explored. Our work is also one of the first work to con-sider how groups and connections form when users follownon-uniform preferences, and to attempt to go beyond Nashequilibrium, as opposed to most previous game-theoreticalapproaches [4].
2. UNIFORM CASE: LONGEST SEQUENCEIn uniform coloring games, we assume that, except for
conflict edges, all edges have the same unit weight. Alterna-tively, this game is entirely characterized by an unweightedand undirected conflict graph that contains all the conflictedges. As shown in [9] k-stable partitions always exist forany value of k, but the analysis of the game is left open assoon as 4-deviations are allowed.
We first provide an argument why this game convergesfor any value of k. Let us define the configuration vectorof a partition C as v(C) = (v1, . . . , vn), where for any i =1, . . . , n, vi denotes the number of groups of size i. One cansee that a deviation of any size produces a configurationvector that is strictly higher in the lexicographical ordering.The game always converges in a finite number of steps.
Lemma 1. (Convergence) For any k ≥ 1, for any graphG = (V,E), the system converges to a k-stable partition.
Proof. Let Ci, Ci+1 be two partitions for G such thatCi+1 is obtained from Ci after a k-deviation for Ci. We provev(Ci) <L v(Ci+1) where L is the lexicographical order. By

definition, for any u ∈ S, we have fu(Ci) < fu(Ci+1) whereS represents the set of nodes involving in the k-deviation(|S| ≤ k). Thus, we get v(Ci+1) − v(Ci) = (0, . . . , 0, k, . . .),and so v(Ci) <L v(Ci+1). Finally, as the number of possiblevectors is finite, we obtain the convergence of the system.
We can then define L(k, n) as the size of a longest sequenceof k-deviations among all the graphs with at most n nodes.One can prove that L(k, n) is always attained in the graphcontaining no conflict edges, which will be instrumental infuture proofs. We define L(k,G) as the longest sequence ofk-deviations for a given graph G.
Lemma 2. For any k, n ≥ 1, L(k, n) = L(k,G∅) where
G∅ = (V,E) is such that |V | = n and |E| = 0.
Proof. Let k, n ≥ 1. Let G = (V,E) be any graph with
|V | = n. We prove that L(k,G∅) ≥ L(k,G). Let S be alongest sequence for G of size L(k,G). We can mimic the
sequence S for G in order to get a valid sub-sequence S∅ forG∅. Indeed, every k-deviation of S is a valid deviation forG∅. It might be possible that, at the end of sequence S∅, thecurrent partition is not k-stable for G∅. Thus, some extrak-deviations might be necessary. We get L(k,G∅) ≥ L(k,G)
and so L(k, n) = L(k,G∅).
Table 1 summarizes our contributions: the exact value ofL(k, n) for small values of k and the proof that its combina-torial properties suddenly increases as k = 4.
k Best known Our results
1 O(n2)[9] ∼ 23n3/2 Theorem 1
2 O(n2)[9] ∼ 23n3/2 Theorem 2
3 O(n3)[9] Ω(n2) Lemma 4
≥ 4 O(2n)[9] Ω(na ln(n)), O(e√n) Theorem 3
Table 1: Our contributions for L(k,n) values.
2.1 Exact value for k < 3In [9], the authors proved the global utility increases for
each k-deviation when k ≤ 2. As that potential functionis also upper bounded by O(n2), the system converges to a2-stable partition in at most a quadratic time.
We improve this result as we completely solve this caseand give the exact (non-asymptotic) value of L(k, n) whenk ≤ 2. It also proves that this potential function method isnot tight. The gist of the proof is to re-interpret sequencesof deviations in the Dominance Lattice. This object hasbeen widely used in theoretical physics and combinatorics tostudy systems in which the addition of one element (e.g., agrain of sand) creates consequences in cascade (e.g., the re-configuration of a sand pile) [5]. Let us first define:
Definition 1 ([2]). A partition of n ≥ 1, is a sequencel1 ≥ l2 ≥ . . . ≥ ln ≥ 0 of integers such that
∑ni=1 li = n.
Given any graph with n nodes, there are as many vectorsof configurations as there are partitions of the integer n. Ifwe denote it by pn, by lexicographical ordering we knowthe system reaches a stable configuration in at most pn =
O(e√n) steps. This is already far less than 2n, which was
shown to be the best upper bound that can be obtained fork ≥ 4 when using an additive potential function [9].
To go further, one needs to go beyond lexicographical or-dering. For n ≥ 6 one can see that some configurations maynever be in the same sequence. It is hence important to dealwith a partial ordering instead of a total one.
Definition 2. (dominance ordering) Given two partitionsof n ≥ 1, a1 ≥ . . . ≥ an and b1 ≥ . . . ≥ bn , we say that adominates b if
∑ij=1 aj ≥
∑ij=1 bj. for all 1 ≤ i ≤ n.
Brylawski proved that this ordering creates a lattice ([2])called the Dominance Lattice. Successors and predecessorscan be defined by covering relation:
Definition 3. (covering) Given two partitions of n ≥ 1,a1 ≥ . . . ≥ an and b1 ≥ . . . ≥ bn, a covers b if and only ifa dominates b and there is no other integer partition c suchthat a dominates c and c dominates b.
There is a strong relation between this structure and 1-deviation, that we can illustrate as follows:
Lemma 3 ([2]). Partition a covers b if, and only if,there exist j, k such that: (i) aj = bj + 1; (ii) ak = bk − 1;(iii) for all l such that l 6= j, l 6= k, we have al = bl; (iv)either k = j + 1 or bj = bk.
Corollary 1. Given a graph G∅ = (V,E), |V | = n and|E| = 0, let a, b be two integer partitions of n. Then adominates b if, and only if, there exist two configurationsC1, C2 for G such that v(C1) = b, v(C2) = a, and there is asequence of 1-deviations from C1 to C2.
Proof. First, assume a covers b. By Lemma 3, thereexist j, k such that aj = bj + 1, ak = bk − 1, and for alli such that i 6= j, k, ai = bi. Moreover, bj ≥ bk, sincek = j + 1 or bj = bk. Let C1 be any configuration of Gsuch that v(C1) = b. We can suppose there are n groupsin C1 by adding empty groups. We order those groups bydecreasing order on their size, denoted C1 = V1, . . . , Vn.Now let u be any vertex in Vk. Such a vertex exists because|Vk| = bk > 0. Then u can move from Vk to Vj , and it is avalid 1-deviation because |Vj | = bj ≥ bk. In so doing, we geta configuration C2 = V ′1 , . . . , V ′n such that |V ′j | = |Vj |+ 1,|V ′k | = |Vk| − 1, and for all i such that i 6= j, k, |V ′i | = |Vi|.In other words, v(C2) = a.
More generally, if a dominates b then there exists a se-quence a = q1, q2, . . . , qp = b, such that for every 1 ≤ i ≤p− 1, qi covers qi+1. Therefore, we can iterate the process,and we get the expected result.
Conversely, let C1, C2 be two configurations of G, suchthat there is a 1-deviation from C1 to C2. Again, we orderthe groups by decreasing size, denoted respectively C1 =V1, . . . , Vn and C2 = V ′1 , . . . , V ′n. Let S = u be the1-deviation that breaks C1. Then u leaves some group Vkfor another group Vj . Furthermore, |Vj | ≥ |Vk| by the hy-pothesis. So, we get either |Vj | = |Vk|, or |Vj | > |Vk|, hencej ≤ k − 1. Let us denote a = v(C2) and b = v(C1). By areordering of groups with equal size, we may assume that Vjis the first group in decreasing order with size |Vj |, whereasVk is the last group in decreasing order with size |Vk|.
• if g ∈ 1, . . . , j − 1, then∑gi=1 ai =
∑gi=1 bi;
• if g ∈ j, . . . , k − 1, then∑gi=1 ai = [
∑gi=1 bi] + 1;
• if g ∈ k, . . . , n, then∑gi=1 ai =
∑gi=1 bi.

bj bk bj bk bj bk bj bk bj bk(a) c1 = q0 (e) q4 = c'2(b) q1 (c) q2 (d) q3
Figure 2: An example of decomposition for a 1-deviation from group bk to group bj.
As a consequence, we have that a dominates b by the hy-pothesis.
In other words, any sequence of 1-deviations from a par-tition C1 to another partition C2 can be decomposed intomore elementary 1-deviations. Note that, in so doing, wemay get another final configuration C′2 6= C2 but it will havethe same configuration vector, as seen on an example in Fig-ure 2. For our purpose, since the new sequence has a sizethat is larger than the original one, and it is a sequence of1-deviations that is also valid, it allows us to conclude.
Theorem 1. L(1, n) = m(m+1)2− (m−r)(m+1−r)
2+ r(r−1)
2,
where r,m are unique solutions of n = m(m+1)2
+ r, r ≤ m.
This implies that L(1, n) ∼ 23n√n as n gets large.
Proof. Let C1, C2, . . . , Cp be a sequence of configura-tions obtained by 1-deviations. By Corollary 1, the sequencev(C1), v(C2), . . . , v(Cp) is a chain, and so L(1, n) is upper-bounded by the size of a longest chain in the Dominancelattice. Conversely, let q1, q2, . . . , qp be any chain of integerpartitions of n. By the proof of Corollary 1, we have thatthere exists a sequence of partitions C1, . . . , Cp such that forevery 1 ≤ i ≤ p v(Ci) = qi, and for every 1 ≤ i ≤ p−1 thereis a sequence of 1-deviations from Ci to Ci+1. Hence L(1, n)is lower-bounded by the size of a longest chain of integerpartitions.
Interestingly, the analysis is exactly the same when 2-deviations are added. Following a similar line of argumentusing vectors of configuration we can further prove:
Theorem 2. L(2, n) = L(1, n).
Proof. Clearly, L(2, n) = Ω(L(1, n)).
Let G∅ = (V,E) be a graph such that |V | = n and |E| = 0.
Let C be any configuration for G∅. Suppose that S = u, vbreaks C. We denote by Vu, Vv the original group of u, v,respectively, and by Vu,v the group both vertices agree tojoin together. If |Vu,v| ≥ |Vu| or |Vu,v| ≥ |Vv|, then the2-deviation can be decomposed into 1-deviations. So we as-sume that |Vu,v| = |Vu| − 1 = |Vv| − 1. There are two cases.
a) Assume Vu = Vv. After the 2-deviation, we replaceVu, Vu,v, by Vu \ u, v, Vu,v ∪ u, v, that is we get twogroups of size |Vu| − 2, |Vu|+ 1, respectively, instead of twogroups of size |Vu| − 1, |Vu|, respectively. Thus, if a vertexof Vu,v breaks the configuration C and joins group Vu, thenwe get the same vector of configuration.
b) Now assume Vu 6= Vv. After the 2-deviation, we re-place Vu, Vv, Vu,v, by Vu \ u, Vv \ v, Vu,v ∪ u, v , thatis we get three groups of size |Vu| − 1, |Vu| − 1, |Vu|+ 1 , re-spectively, instead of three groups of size |Vu|−1, |Vu|, |Vu|,
respectively. Thus, if a vertex of Vv breaks the configurationC and joins group Vu, then we also get the same vector ofconfiguration.
Finally, any vector of configuration that is obtained froma 2-deviation may also be gotten from a sequence of 1-deviation. Thus L(2, n) = L(1, n) = θ(n
√n).
2.2 Non polynomial lower bound for k > 3As seen above, we already showed that L(4, n) = O(e
√n),
which is already much better than what additive potentialfunction methods can attain [9]. However, the computa-tional cost of 4-deviations is unknown. We resolve this prob-lem by proving L(4, n) cannot be bounded polynomially.
Theorem 3. L(4, n) = Ω(na ln(n)) where a > 0.
Proof. Let G∅ = (V,E) with |E| = 0. Suppose n =|V | = cL where c, L are positive integers. We first con-
struct a partition C0 for G∅ for which the vector of partitionv(C0) = (v1, v2, . . . , vn) is such that for any j, 1 ≤ j ≤ L,vj = c, and for any j, L + 1 ≤ j ≤ n, vj = 0. Clearly thispartition can be obtained with a sequence of 1-deviations.In the following, we only consider groups of sizes at most L.
We introduce the notion of reverse vector of difference.Starting from partition C0, we define the initial reverse vec-tor of difference as v0 = (v0(1), v0(2), . . . , v0(L)) where, forany j, 1 ≤ j ≤ L, v0(j) = vL−j+1− c represents the numberof groups of size L− j + 1 minus the initial number c. Thevector of difference v for a configuration C, is such that, forany j, 1 ≤ j ≤ L, v(j) represents the difference between thenumber of groups of size L − j + 1 that have been createdand the number of groups of size j that have been removed,in the sequence of deviations from v0 to v.
A reverse vector of difference v is c-balanced if, for any j,1 ≤ j ≤ L, v(j) ≥ −c. Any sequence of deviations mustinduce a c-balanced vector (there are exactly c groups ofeach size at most L at the beginning).
We only consider 4-deviations that consist in creating fivegroups of sizes p, p−2, p−2, p−2, p−2, and removing fivegroups of sizes p − 4, p − 1, p − 1, p − 1, p − 1 for some p,5 ≤ p ≤ L. We consider such a 4-deviation because it strictlydecreases the global utility and so it will allow us to con-struct long sequences. We define an elementary vector of dif-ference φL−p+1 of size L: φL−p+1 = (. . . , 1,−4, 4, 0,−1, . . .)where dots represent 0 values, 1 corresponds to the groupof size p that has been created, −4 corresponds to the fourgroups of size p − 1 that have been removed, etc. The first1 at index L − p + 1 means that a group of L − p + 1 hasbeen created, −4 is at index L− p+ 2, etc. Given a reversevector of difference v (corresponding to a current partitionC), the reverse vector of difference v′ for C′ obtained aftera 4-deviation for C, is v′ = v + φL−p+1.
In other words,
φL−p+1(j) =
1 if j = L− p+ 1
−4 if j = L− p+ 2
4 if j = L− p+ 3
−1 if j = L− p+ 5
0 otherwise
We define notations for 1-deviations that consist in cre-ating two groups of sizes p, q, and removing two groups ofsizes p−1, q+1, for some p, q, 3 ≤ q+2 ≤ p ≤ L. We define

an elementary vector of difference φL−p+1,L−q+1 of size L:
φL−p+1,L−q+1 =
(. . . , 1,−1, . . . ,−1, 1, . . .) if p > q + 2
(. . . , 1,−2, 1, . . .) if p = q + 2
where the first 1 (index L− p+ 1) corresponds to the groupof size p that has been created. The second value 1 (indexL− q + 1) corresponds to the group that has been created.
In other words,
φL−p+1,L−q+1(j) =
1 if j = L− p+ 1
−1 if j = L− p+ 2
−1 if j = L− q1 if j = L− q + 1
0 otherwise
We now define a particular sequence of 1-deviations. Forany j1, j2, d such that 1 ≤ j1 < j1 + d ≤ j2− d < j2 ≤ L, wedefine φj1,j1+d,j2−d,j2 =
∑d−1j=0 φj1+j,j2−j =
(. . . , 1, . . . ,−1, . . . ,−1, . . . , 1, . . .) if j1 + d 6= j2 − d(. . . , 1, . . . ,−2, . . . , 1, . . .) if j1 + d = j2 − d
Given a reverse vector of difference v and an integer r,1 ≤ r ≤ L, we define v′ = Φ(v, r) as follows:
v′(j + r − 1) = v(j) ∀j, 1 ≤ j ≤ L− r + 1,
v′(j) = 0 ∀j, 1 ≤ j < r.
The size s of a reverse vector of difference v is such thatv(s) 6= 0 and v(j) = 0 for any j, s+ 1 ≤ j ≤ L.
We define the notion of symmetric vector. A reverse vectorof difference v is symmetric if for any j, 1 ≤ j ≤ s, v(j) =v(s− j + 1) where s is the size of v.
Claim 1. Let v be any symmetric vector of difference ofsize s. Then, for any positive integers r and d, 1+(r−1)d ≤s, v′ =
∑r−1h=0 Φ(v, 1 + hd) is a symmetric vector.
Proof. Vector v′ has size s′ = (r−1)d+s. Let first sup-
pose that r is even. v′ =∑r/2−1h=0 Φ(v, 1+hd)+
∑r−1h=r/2 Φ(v, 1+
hd). We prove that, for any r′, 0 ≤ r′ ≤ r/2 − 1, yr′ =∑r′
h=0 Φ(v, 1 +hd) +∑r−1h=r−1−r′ Φ(v, 1 +hd) is a symmetric
vector. Note that the size of yr′ is s′ = (r − 1)d+ s for anyr′, 0 ≤ r′ ≤ r/2− 1.
By induction on r′. Suppose r′ = 0. We have y0 =Φ(v, 1) + Φ(v, 1 + (r− 1)d). For any j, 1 ≤ j ≤ (r− 1)d+ s,y0(j) = v(j) + v(j − (r − 1)d). As v is a symmetric vectorof size s, then v(j − (r− 1)d) = v(s− j + (r− 1)d+ 1), andso v(j − (r − 1)d) = v(s′ − j + 1) because y0 has size s′.Thus, we get y0(j) = v(j) + v(s′ − j + 1). We deduce thaty0(s′ − j + 1) = v(s′ − j + 1) + v(s′ − (s′ − j + 1) + 1), andso y0(s′ − j + 1) = v(s′ − j + 1) + v(j). As a result, y0 is asymmetric vector.
Suppose it is true for r′, 0 ≤ r′ ≤ r − 2, we prove itis also true for r′ + 1. Vector yr′ is a symmetric vector.We have yr′+1 = yr′ + Φ(v, 1 + (r′ + 1)d) + Φ(v, 1 + (r −r′ − 2)d). First, if j ≤ (r + 1)d, then yr′+1(j) − yr′(j) =0 by construction. Also, yr′+1(j) − yr′(j) = 0 for any j,(r − r′ − 2)d+ s ≤ j ≤ s′. For any j, 1 ≤ j ≤ (r − 1)d+ s,yr′+1(j) − yr′(j) = v(j − (r′ + 1)d) + v(j − (r − r′ − 2)d).Let x1 = (r + 1)d + 1 and let x2 = (r − r′ − 2)d + s − 1.Consider the sub-vector y′r′ of yr′ defined as follows: y′r′ =(yr′(x1), yr′(x1 + 1), . . . , yr′(x2 − 1), yr′(x2)). Clearly y′r′
is a symmetric vector because x1 − 1 = s′ − x2. Thus,we can apply proof for case r′ = 0 to show that y′r′+1 =Φ(v, 1 + (r′ + 1)d) + Φ(v, 1 + (r − r′ − 2)d) is a symmetricvector. So yr′+1 is a symmetric vector.
Finally, for any r′, 0 ≤ r′ ≤ r/2 − 1, yr′ is a symmetricvector. We get that v′ is a symmetric vector.
Consider now that r is odd. We set v′′ =∑(r−1)/2−1h=0 Φ(v, 1+
hd) +∑r−1h=(r−1)/2+1 Φ(v, 1 + hd). Using the previous induc-
tion, we prove that v′′ is symmetric vector. We now provethat v′ = v′′+Φ(v, 1+d(r−1)/2) is a symmetric vector. Letv′′′ = Φ(v, 1 + d(r− 1)/2). We have v′′′(j) = v′′′((r− 1)d+s−j) because d r−1
2+1−1 = d(r−1)+s−d r−1
2−s. Finally,
v′ is a symmetric vector because v′′ is symmetric.
Let l(1), T ≥ 1 be any two integers such that 2T−1l(1) ≤L. We will explain this choice at the end of the proof. Forany i, 1 ≤ i ≤ T − 1, we construct the vector vi+1 from vi
such that these vectors have a special property, called GoodProperty (Definition 4).
We first construct v1. Let t = l(1)− 1.We now construct z1 = (
∑tj=1 φj)+φ2,3,3,4+φt+1,t+2,t+2,t+3+
φt+4,t+5,t+6,t+7 + φ2,4,4,6. For any j, 1 ≤ j ≤ L:
z1(j) =
1 if j = 1
−1 if j = 2
−1 if j = 3
1 if j = 6
1 if j = t+ 2
−1 if j = t+ 5
−1 if j = t+ 6
1 if j = t+ 7
0 if j /∈ 1, 2, 3, 6, t+ 2, t+ 5, t+ 6, t+ 7
We now construct z2 =∑t−4j=1 Φ(z1, j). For any j, 1 ≤ j ≤
L:
z2(j) =
1 if j = 1
−1 if j = 3
−1 if j = 4
−1 if j = 5
−1 if j = t− 3
1 if j = t− 1
1 if j = t
1 if j = t+ 1
1 if j = t+ 2
1 if j = t+ 3
1 if j = t+ 4
−1 if j = t+ 6
−1 if j = 2t− 2
−1 if j = 2t− 1
−1 if j = 2t
1 if j = 2t+ 2
0 otherwise
We finally construct v1 = z2+φ5,t,t+3,2t−2+φt−3,t−1,t+4,t+6.

For any j, 1 ≤ j ≤ L:
v1(j) =
1 if j = 1
−1 if j = 3
−1 if j = 4
1 if j = t+ 1
1 if j = t+ 2
−1 if j = 2t− 1
−1 if j = 2t
1 if j = 2t+ 2
0 otherwise
The intuitive idea is that such consecutive 4-deviations,called cascade, balance the vector of difference. v1 has theGood Property and Claim 2 shows that each vector of dif-ference from v0 to v1 is c1-balanced (for some constant c1).
For any i, 1 ≤ i ≤ T − 1, we denote by si the size of thereverse vector of difference vi, and set l(i) = si/2. Note thatthe size of v1 depends on the choice of l(1), s1 = 2l(1).
Definition 4. vi has the Good Property if si is even andif there exists ti1, ti2 with 1 < ti1 < ti2 < 2ti1−1, ti2 ≤ 2i, suchthat for any j, 1 ≤ j ≤ L:
v1(j) =
1 if j = 1
−1 if j = ti1−1 if j = ti21 if j = l(i)
1 if j = l(i) + 1
−1 if j = 2l(i)− ti2 + 1
−1 if j = 2l(i)− ti1 + 1
1 if j = 2l(i)
0 otherwise
Claim 2. There exists a constant c1 such that every re-verse vector of difference from v0 to v1, is c1-balanced.
In order to build vi+1 from vi, we define an intermediaryconstruction. For any i, 1 ≤ i ≤ T − 1, we define ui+1 =∑α(i)j=0 Φ(vi, 1+j(ti1−1)) where α(i) is the largest even integer
j such that ti2 + j(ti1−1) < l(i). We now prove that if vi hasthe Good Property, then it is possible to construct ui+1 andvi+1 such that vi+1 has the Good Property. We will provein Claim 4 that our constructive proof makes each vector ofdifference c-balanced (for some c defined later).
Figure 3 represents the construction of u2 (and v2) fromthe vector v1. The vector v1 is applied a larger number oftimes and the starting point is shifted in order to balancethe vectors of differences. This cascade technique is usedrecursively. The vector v3 is obtained by applying a cascadeof vectors v2, and so on. We prove that this constructionuses a large number (non polynomial) of deviations and asthe vector will be enough balanced, the number of nodes willremain small compared to the number of deviations.
Claim 3. For any i, 1 ≤ i ≤ T − 1, if vi has the GoodProperty, then there exists a sequence of deviations fromui+1 to vi+1 such that vi+1 has the Good Property.
Proof. For some i, 1 ≤ i ≤ T − 1, suppose that vi hasthe Good Property. By construction there exists ti+1
1 and
v1
v1
v1
v1
v1
v1
v1
v1
v1
v2
v2
v2
v2
v2
v3
v3
v3
v4
...
Figure 3: Long sequence using recursive cascades.
ti+12 such that, for any j, 1 ≤ j ≤ ti+1
2 :
ui+1(j) =
1 if j = 1
−1 if j = ti+11
−1 if j = ti+12
0 otherwise
where ti+11 = ti2 and ti+1
2 = 2ti1 − 1.We get 1 < ti+1
1 < ti+12 because 1 < ti2 < 2ti1 − 1 by
hypothesis. Also, ti+12 < 2ti+1
1 −1 because 2ti1−1 < 2ti2−1.Finally, ti+1
2 ≤ 2i+1 because ti+12 < 2ti+1
1 = 2ti2 ≤ 2i2. ByClaim 1, we obtain the properties for the end of the vector.
Note that l(i + 1) ≤ 2l(i). Furthermore si+1 = α(i)(ti1 −1) + si. As α(i) and si are even integers, then si+1 is even.
By Claim 1, we get that ui+1 is a symmetric vector, that isfor any j, 1 ≤ j ≤ 2l(i+1), ui+1(j) = ui+1(2l(i+1)−j+1).Furthermore, by the choice of α(i), we get that there existj1, j2, ti+1
2 < j1 < j2 < 2l(i) − ti1 + 1, such that for any j,ti+12 ≤ j ≤ 2l(i)− ti1 + 1:
ui+1(j) ∈
−1, 0 if ti+1
2 < j ≤ j10, 1 if j1 < j < j2
−1, 0 if j2 ≤ j < 2l(i)− ti1 + 1
Furthermore:∑j1
j=ti+12 +1
ui+1(j)+∑2l(i)−ti1j=j2
ui+1(j) = −∑j2−1j=j1+1 u
i+1(j).
As ui(l(1)) = 1, ui+1(l(i) + α(i)2
(t11 − 1)) = 1. Also,
ui+1(l(i) + 1 + α(i)2
(t11 − 1)) = 1. As α(i) is even, we get
ui+1(l(i + 1)) = 1 because l(i) + α(i)2
= si+1
2. Recall that
si+1 = α(i)(ti1 − 1) + si. Thus, ui+1(l(i+ 1) + 1) = 1.We now prove that there exists a sequence of 1-deviations
in order to construct vi+1 with the Good Property. As ui+1
is a symmetric vector (Claim 1), if ui+1(j) = −1 for anyj, ti+1
2 < j ≤ j1, then ui+1(2l(i + 1) − j + 1) = −1. Letj such that ui+1(j) = −1 and ti+1
2 < j ≤ j1. By previousremark and again by symmetry, there exists j′, j1 < j′ < j2,j′ /∈ l(i+ 1), l(i+ 1) + 1, such that ui+1(j′) = ui+1(2l(i+1)− j′ + 1) = 1.
We construct zi+11 = ui+1 + φj,j′,2l(i+1)−j′+1,2l(i+1)−j+1.
This construction clearly keeps the symmetry property. As∑j1
j=ti+12 +1
ui+1(j)+∑2l(i)−ti1j=j2
ui+1(j) = −∑j2−1j=j1+1 u
i+1(j),
then we can find another 4-uplet (j, j′, 2l(i+1)−j′+1, 2l(i+1)− j + 1), j′ /∈ l(i+ 1), l(i+ 1) + 1, to construct zi+1
2 =zi+11 + φj,j′,2l(i+1)−j′+1,2l(i+1)−j+1. And so on until vi+1 =
zi+1f where f = 1
2
∑j2−1j=j1+1 u
i+1(j)
The vector of difference vi+1 has the Good Property.
As v1 has the Good Property, we deduce that for any i,1 ≤ i ≤ T , vi has the Good Property.

Claim 4. For any i, 1 ≤ i ≤ T , any vector v of differencein the sequence from v0 to vi, is (c1 + i− 1)-balanced wherec1 is the constant defined in Claim 2.
Proof. We prove the result by induction on i. The vectorv0 is 0-balanced by definition. Claim 2 proves the result fori = 1. Suppose it is true for any i′ ≤ i ≤ T − 1. Weprove that it is true for i+ 1. We construct vi+1 from vi asdescribed in the proof of Claim 3. Recall that we first build
ui+1 =∑α(i)j=0 Φ(vi, 1 + j(ti1 − 1)) where α(i) is the largest
even integer j such that ti2 + j(ti1 − 1) < l(i).
For any b, 0 ≤ b ≤ α(i)−1, consider yi+1b =
∑bj=0 Φ(vi, 1+
j(ti1 − 1)). We prove that each vector of difference from vi
to yi+1b is (c1 + i)-balanced. By induction on b. It is true for
b = 0. Indeed by the first induction hypothesis, each vectorof difference from v0 to Φ(vi, 1), is (c1 + i − 1)-balanced.Suppose it is true for any b′ ≤ b ≤ α(i) − 1. We prove itis true for b + 1. By Claim 3, yi+1
b is 1-balanced becauseΦ(vi, 1) is 1-balanced (the values of the vector belong to theset −1, 0, 1). By definition yi+1
b+1 = yi+1b + Φ(vi, 1 + (b +
1)(ti1−1)). By the first induction hypothesis, each sequenceof Φ(vi, 1+(b+1)(ti1−1)) is (c1+i−1)-balanced. Since yi+1
b
is 1-balanced, each vector of difference from yi+1b to yi+1
b+1, is
(c1 + i)-balanced. Thus, ui+1 is (c1 + i)-balanced.To conclude, it remains to prove that each vector of dif-
ference from ui+1 to vi+1, is (c+ i)-balanced. Consider thelast 1-deviations described in the proof of Claim 3. Everydeviation consists in replacing values −1 and 1 by 0. Thus,vi+1 is (c+ i)-balanced.
For any i, 1 ≤ i ≤ T , let Si be the sequence of deviationsfrom v0 to vi.
Claim 5. For any i, 1 ≤ i ≤ T − 1, l(i) ≤ 2i−1l(1).
Proof. By induction on i. It is clearly true for i = 1.Suppose it is true for any i′ ≤ i. We prove it is true for i+1.By construction, l(i+ 1) ≤ 2l(i). Thus, l(i+ 1) ≤ 2i−12l(1)by induction hypothesis. Finally we get l(i+1) ≤ 2il(1).
Claim 6. For any i, 1 ≤ i ≤ T−1, |Si+1| ≥ ( l(i)2i−3)|Si|.
Proof. |Si+1| = α(i)|Si| with α(i) is the largest eveninteger j such that ti2 + j(ti1 − 1) < l(i). Thus α(i) ≥b l(i)−2i+1+1
2i−1c because ti1, t
i2 ≤ 2i. So |Si+1| ≥ ( l(i)
2i−3)|Si|.
Claim 7. For any i, 1 ≤ i ≤ T − 1, and for any l(1) >
2i+13, then |Si| ≥ l(1)i−1|S1|2i
.
Proof. First note that l(1) ≥ l(i) for any i ≥ 1. As
l(1) > 2i+13, we get that l(i)
2i− 3 ≥ l(i)
2i+1 . By Claim 6, we
get |Si+1| ≥ l(i)
2i+1 |Si|. Thus, |Si| ≥ l(1)i−1|S1|2i
.
We proved that |ST | ≥ l(1)T−1|S1|2T
and l(T ) ≤ 2T−1l(1).By Claim 4, c = c1 + T − 1 guarantees the feasibility
of the sequence of deviations from v0 to vT . Thus, n =2T−1l(1)(c1 + T − 1) is sufficient to construct a valid se-quence. For any l(1), set T = blog2(l(1)/6)c− 1. We chooseL ≥ 2T−1l(1) as consequence. We obtain that for any n,there exists a sequence of 1 and 4-deviations S of lengthΩ(nalog2(n)) for some constant a > 0.
We prove a lower bound when k = 3 using the same tech-niques. Obviously, we cannot apply cascades a large numberof times since any sequence of 3-deviations is of size O(n3).
Lemma 4. L(3, n) = Ω(n2).
Proof. This proof is similar to the proof for k = 4 butit is simpler since we construct only v1, v2, v3, v4.
We only consider here 3-deviations that consist in creating1 group of size p, removing 3 groups of size p− 1, creating 3groups of p−2, and removing 1 group of size p−3, for somep. Let φL−p+1 be the vector of difference corresponding toa 3-deviation defined as follows. For any j, 1 ≤ j ≤ L:
φj =
1 if j = L− p+ 1
−3 if j = L− p+ 2
3 if j = L− p+ 3
−1 if j = L− p+ 4
0 otherwise
We start from the vector of difference v0 = (0, 0, . . .).Set v1 =
∑ti=1 φi. For any j, 1 ≤ j ≤ L,
v1(j) =
1 if j = 1
−2 if j = 2
1 if j = 3
−1 if j = t+ 1
2 if j = t+ 2
−1 if j = t+ 3
0 otherwise
Set v2 =∑t−2i=1 Φ(v1, i). For any j, 1 ≤ j ≤ L,
v2(j) =
1 if j = 1
−1 if j = 2
−1 if j = t− 1
1 if j = t
−1 if j = t+ 1
1 if j = t+ 2
1 if j = 2t
−1 if j = 2t+ 1
0 otherwise
Set v3 =∑t−3i=1 Φ(v2, i). For any j, 1 ≤ j ≤ L,
v3(j) =
1 if j = 1
−1 if j = t− 2
−1 if j = t− 1
−1 if j = t+ 1
1 if j = 3t− 2
1 if j = 3t
−1 if j = 4t+ 1
0 otherwise
Set v4 =∑ti=1 Φ(v3, i). As v3 has a constant number of
non zero values, then for any j, 1 ≤ j ≤ L, v4(j) ≥ −cwhere c ≤ 4.
Clearly, each vector of difference from v0 to v4 is c-balancedwhere c is constant. Thus, we get that the total number of3-deviations is θ(t4) and the number of nodes is θ(t2).

3. GENERAL CASE: LARGEST COLLUSIONSThe uniform case we analyzed so far may be described
as a “clique with enemies”: A pair of nodes may either beconnected by an edge with unit weight, w(u, v) = 1, or theyare in conflict w(u, v) = −M , where M is sufficiently largeto ensure that people in conflict never choose the same color.
More generally, a coloring game may be defined with weightstaking values in a larger set. In such, nodes choose to inter-act with each others according to more complex preferences.
We first show that 1-deviations in a general weighted col-oring game result in an increased total utility. Hence,
Theorem 4. For any weighted graph, if only 1-deviationsare allowed, a coloring game always converges in O(n2) steps.
Proof. This is clear as the global utility increases at each1-deviation, without any concern about the values of theweights. Indeed, it only requires symmetrical relations be-tween nodes to hold.
This proves that all these games admit a configurationthat is 1-stable, or equivalently, a Nash-equilibrium.
However, these games are much harder to characterizethan the uniform case: A k-stable configuration (with k > 1)may not necessarily exist, and as a result, the dynamics ofthe game may not always converge. It may also fail to con-verge even when such configurations exist. We now ana-lyze all games where weights are chosen in a fixed subsetW ⊆ Z. We wish to identify the greatest values of k forwhich k-stability can be attained, that we denote k(W).
3.1 Games with weights W = −M, 0, 1We first focus on the set W = −M, 0, 1, of theoreti-
cal importance. Whereas it does not differ that much fromthe set −M, 1, its stability properties are far more con-strained. If we refer ourselves to the dynamic system, thenthere may not exist stable configurations whenever the globalutility does not increase at each step. We prove that in thiscase k(W) = 2.
Let us first show that k(W) ≥ 2. In fact, Theorem 5is a global stability result, which is more precise and usesstructural properties of the graphs. Let us define the ”friend-ship graph” G+ = (V,E+) of G = (V,E,w), where E+ =u, v ∈ E : w(u, v) > 0. We remind that the girth of agraph is the length of its shortest cycle. By definition, anacyclic graph has infinite girth.
Theorem 5. Given an integer k ≥ 1 and a graph G =(V,E,w) with W = −M, 0, 1, there exists a k-stable con-figuration for G if the girth of the friendship graph G+ is atleast k + 1. In that case, L(k, n) = O(n2).
Proof. Let C0 be any configuration for G, such thatthere is no vertices u and v with w(u, v) = −M and C0(u) =C0(v). If C0 is k-stable, we are done. Otherwise there existsa subset S = v1, v2, . . . , v|S|, |S| ≤ k, such that S breaksC0. As in the case k = 1, we will prove the global utilitystrictly increases after any k-deviation. Let C1 be the newconfiguration for G that we get after the k-deviation. Actu-ally, we already have that, for any 1 ≤ i ≤ |S|, fvi(C1) ≥fvi(C0) + 1. However, we have to be careful with summa-tions, as we may have vi that benefits from the presenceof vj , for some 1 ≤ j ≤ |S|, j 6= i. Such improvement ofthe individual utility of both vi and vj cannot be counted
twice for the global utility. Thus, by symmetry, we getf(C1)− f(C0) ≥ 2|S| − 2
∑1≤i<j≤|S| w(vi, vj).
Moreover, we claim that for every 1 ≤ i < j ≤ |S|,w(vi, vj) 6= −M , because M is taken large enough so thatsuch an interaction is avoided at any cost, if it does not al-ready exist. Consequently, either w(vi, vj) = 0, or w(vi, vj) =1. Hence, by definition of G+, f(C1)−f(C0) ≥ 2(|S|−|ES |)where ES is the set of edges induced by nodes of S in thefriendship graph G+. Furthermore, G+ has girth at leastk + 1, that is the induced graph GS = (S,ES) is a forest,because |S| ≤ k, and so |ES | < |S|. Finally, since the globalutility is upper-bounded, we get a k-stable configuration forG after a finite number of k-deviations.
The proof of Theorem 5 uses a potential function basedon global utility. Particularly, if G+ is cycle-free, then weget there is a k-stable configuration for G, for any k ≥ 1;if G+ is triangle-free, then there always exists a 3-stableconfiguration for G. Furthermore, as the girth of any graphis at least 3, then there always exists a 2-stable configuration(k(−M, 0, 1) ≥ 2). It also shows that the game takesat most O(n2) steps to converge. Using another sequenceconstruction, one can prove that this bound is indeed tightin the general case.
Lemma 5. W = −M, 0, 1, LW(1, n) = L(2, n) = θ(n2).
Proof. Let any p ≥ 1. Let G = (V,E) be the graphconstructed as follows. Without loss of generality assumen = 3p. Let V = V 1∪V 2∪V 3 with |V 1| = |V 2| = |V 3| = p.For any u, v ∈ V 2 ∪ V 3, w(u, v) = 1. For any u, v ∈ V 1,w(u, v) = 0. For any u ∈ V 1, for any v ∈ V 2, w(u, v) = 1.
We set V 1 = u1, u2, . . . , up and V 2 = v1, v2, . . . , vp.Consider the partition C such that any node of V 1 ∪ V 2
forms a singleton group and there is group formed by all thenodes of V 3.
Sequentially, each node of V 1 reaches the group of v1. Theutility of v1 is now p. Then v1 reaches the group composedof all nodes of V 3. The utility of v1 is now p + 1, and theutility of each ui is 0. The number of 1-deviations is p+ 1.We repeat the same process for v2 using p + 1 deviations.And so on for each vi, 3 ≤ i ≤ p.
Finally, the number of 1-deviations is (p + 1)p. ThusL−M,0,1(1, n) = θ(n2) because the global utility, upper-bounded by n(n−1), strictly increases after each 1-deviation.
Obviously, we get L−M,0,1(2, n) = θ(n2)
Finally, we show that there exists a graph G such thatany configuration for G is not 3-stable (k(−M, 0, 1) ≤ 2).The proof is all the more counter-intuitive as it implies thereare infinite sequences of deviations that do not change theglobal utility, even in graphs with only four edges weightedby 0!
We first define the notion of twin vertices and prove auseful lemma.
Definition 5. Let G = (V,E,w) be a graph, and u, v ∈V be two vertices. We say that u and v are twins if and onlyif w(u, v) > 0 and for all vertex s ∈ V w(u, s) = w(v, s).
Lemma 6. Given a graph G = (V,E,w), and a 1-stableconfiguration C for G, for all vertices u, v such that u andv are twins, we have that C(u) = C(v).
Proof. By contradiction. Suppose C(u) 6= C(v). Bysymmetry, we can assume fu(C) ≤ fv(C). Thus, u breaks

C3
C3
C3
C2C2
C2
C3
C3
C3
C3
Figure 4: Graph that does not admit a k-stable con-figuration with k=4 (left) and k=3 (right).
the configuration C, as vertex u joins the group of v because,in this new configuration C′, we have fu(C′) = fv(C) +w(u, v) > fu(C). A contradiction. Hence C(u) = C(v).
Lemma 7. Let W = −M, 0, 1. There exists a graphG = (V,E,w) such that any configuration with single chan-nel for G is not 3-stable.
Proof. We define the graph G = (V,E,w) as follows.The set of vertices V is partitioned into five subsets: A0, A1, A2, A3
and b0, b1, b2, b3, c0, c1. Let i, i′, j, j′ be four integers (notnecessarily distinct), such that 0 ≤ i, i′, j, j′ ≤ 3.
• First we have that |Ai| = 4, and we denote the verticesin Ai by ai,0, ai,1, ai,2 and ai,3.
• Furthermore, we set w(ai,j , ai′,j′) = 1 if i = i′, andw(ai,j , ai′,j′) = −M otherwise.
• We also set w(bi, ai′,j) = 1 if i = i′, or i′ ≡ i+ 1 (mod4) and j 6= i; w(bi, ai′,j) = 0 if i′ ≡ i+ 1 (mod 4) andj = i; w(bi, ai′,j) = −M otherwise.
• Moreover, w(bi, b′i) = 1 if i′ ≡ i±1 (mod 4); w(bi, b
′i) =
−M if i′ ≡ i+ 2 (mod 4).
• Finally, for every 0 ≤ p ≤ 1, w(bi, cp) = 1, w(cp, ai,j) =1 if i ≡ p (mod 2), and w(cp, ai,j) = −M otherwise.
• We also set w(c0, c1) = −M .
Observe that there are only four edges in G whose weightequals 0. Figure 4 (right) represents the graph G.
We now assume there exists a 3-stable configuration C3 forG.
We first claim that every subset Ai is a subgroup in C3,that is all the vertices in Ai are in the same group in C3.Indeed, Ai \ ai,i is a subgroup in C3 by Lemma 6. Then,by contradiction, suppose ai,i is not in the same group asAi\ai,i. Observe that all the vertices in Ai share the sameenemies. Moreover, the only friends of ai,i that are not inAi are bi and ci (mod 2). Thus fai,i(C3) ≤ 2, so, ai,i breaksC3, and the claim is proved. At the end, there are, at least,four groups in C3 (one different group for each subset Ai).
We now claim that either bi is in the same group as Ai in C3,or bi is in the same group as Ai′ in C3, with i′ ≡ i+ 1 (mod4). By contradiction. One can check that, if bi is neitherin the same group as Ai nor in the same group as Ai′ , we
have fbi(C3) ≤ 2, due to the conflict graph in G. On theopposite, if either bi is in the same group as Ai in C3, or biis in the same group as Ai′ in C3, we get fbi(C3) ≥ 3, andthere is no enemy of bi that is not enemy with the verticesin Ai or that is not enemy with the vertices in Ai′ . Again,there is a contradiction, as in this case, C3 would not be1-stable.
Especially, we claim that there is an i, 0 ≤ i ≤ 3, suchthat bi and bi′′ are in the same group as Ai in C3, withi ≡ i′′ + 1 (mod 4). To prove this claim, we first recallthat w(bi, bi′′) = 1. Then, again, we prove this claim bycontradiction. Suppose that, for every 0 ≤ i ≤ 3, there isonly one vertex bj such that bj and Ai are in the same group.By the hypothesis, either j = i, or j = i′′. Furthermore,either j = i for all i, or j = i′′ for all i. We also have thateither c0 is in the same group as A0, or c0 is in the samegroup as A2. In the same way, we have that either c1 isin the same group as A1, or c1 is in the same group as A3.Moreover, for every 0 ≤ i ≤ 3, w(c0, bi) = w(c1, bi) = 1.Thus, if j = i′′ for all i, then any subset bi′′ , ci′′ (mod 2)breaks the configuration C3, by joining the same group asAi′′ , and so, j = i for all i, because C3 is 3-stable. We havefbi(C3) = 4 if ci (mod 2) is not in the same group as bi and Ai,and fbi(C3) = 5 otherwise. However, remark that there arealways two vertices bi such that fbi(C3) = 4, because thereare only two vertices c0, c1. Furthermore, if fbi(C3) = 4,then the subset bi, ci′ (mod 2) breaks the configuration C3,by joining the same group as Ai′ , with i′ ≡ i + 1 (mod 4).Hence C3 cannot be 2-stable, which is a contradiction, andour third claim is proved.
As an immediate consequence, we get that there exists ani, 0 ≤ i ≤ 3, such that bi, bi′′ and ci (mod 2) are in the samegroup as Ai in C, with i ≡ i′′ + 1 (mod 4). Such a group isunique in C3, due to the conflict graph in G. By symmetry,suppose that i = 0.There are four cases.
1. If b1 and b2 are in the same group as A2 in C3, thenb1, c1 breaks the configuration C3, by joining thesame group as A1.
2. If b2 is in the same group as A3, and b1 and c1 are in thesame group as A1, then b2 breaks the configurationC3, by joining the same group as A2.
3. If b2 and c1 are in the same group as A3, then b3breaks the configuration C3, by joining the same groupas A3.
4. If b2 is in the same group as A2, and b1 and c1 arein the same group as A1, then b2, b3, c1 breaks theconfiguration C3, by joining the same group as A3.
Finally, there does not exist a 3-stable configuration C3 forG.
Figure 4 presents two graphs that are not stable for k = 4and k = 3, respectively. To keep graphs readable, we useconventions. (1) Some cliques of nodes are grouped within acircle (e.g., C3 is a clique of 3 nodes); an edge from anothernode to that circle denotes an edge to all elements of thisclique. (2) On the right, we omitted the edges with weights−M denoting pairs of enemies. These are all the edges be-tween nodes on different sides of a dashed line, unless it wasotherwise indicated as a green edge (weight 1) or a whiteedge (weight 0). We deduce then:
Lemma 8. Let W = −M, 0, 1. Then k(W) = 2.

3.2 Game with general weightsWhile the two results we obtained (k ≥ 1 in general, k = 2
when the set of weights contains −M ,0 and 1) seems con-strained, we now prove that these are the best results thatone can hope for.
First, we observe that all results from the previous sectionhold when more negative weights are added to the set W,hence we have k(−N ∪ −M, 0, 1) = 2. However, as weshow through a counter-example, no 2-stable configurationexists in general when W contains two positive elements,even when the zero is not present.
Lemma 9. Given two positive integers a, b such that a <b, there is a graph G = (V,E,w) with W = −M,a, b suchthat there is no 2-stable configuration for G.
Proof. We build a graph G = (V,E,w) as follows. Theset V can be partitioned into four sets A = a1, a2, a3,B = b1, v2, v3, C = c1, c2, c3 and u1, u2, u3, such thatall the edges between two vertices of the same subset haveweight b. Moreover, all the edges that lie between A andB, B and C, and C and A have weight −M . We also setthat for all vertices ai ∈ A, for all vertices bj ∈ B, and forall vertices cl ∈ C, w(ai, u1) = w(bj , u2) = w(cl, u3) = b,whereas w(ai, u3) = w(bj , u1) = w(cl, u2) = −M . Finally:
• w(u1, c1) = w(u1, c2) = b; w(u1, c3) = a;
• w(u2, a1) = w(u2, a2) = b; w(u2, a3) = a;
• w(u3, b1) = w(u3, b2) = b; w(u3, b3) = a.
Assume there exists a 2-stable configuration C2 for G.We claim that A,B and C are subgroups in C2. Indeed,
it is clear by Lemma 6 that a1, a2, b1, b2, c1, c2 aresubgroups in C. By symmetry, let us only consider the caseof a3. Remark that all the vertices in A share the sameenemies in the graph. Moreover, the sum of the positiveweights that lie between u3 and V \A equals b+ a, which islower than 2b. Hence A is a subgroup of C2 because C2 is1-stable.
We now claim that, for any ui ∈ u1, u2, u3, there ex-ists a subgroup K ∈ A,B,C such that K ⊂ C2(ui). Bysymmetry, we only need to show it for u1. This is clear asw(u1, u2) + w(u1, u3) = 2b < 2b + a, and the enemies of u1
are contained within the enemies of A and C.At last, we have either A ∪ u1, u2 or B ∪ u2, u3 or
C ∪ u3, u1 which is a group in C2. By symmetry, wecan suppose A ∪ u1, u2 is a group in C2. Then, we haveu2, u3 that breaks C2, and so C2 cannot be 2-stable. Acontradiction.
As a consequence, there does not exist any 2-stable con-figuration for G.
Corollary 2. Let W be a set of weights, such that−M,N ⊂ W.3 There exists a graph G = (V,E,w) suchthat any configuration for G is not 3-stable.
Proof. By Lemma 10, there exists a graphG0 = (V0, E0, w0)with −M, 0, 1 such that there does not exist any 3-stableconfiguration for G0. Now, let a ∈ W \ −M,N. Notethat a may be positive or non positive. We define G1 =(V0, E0, w1) such that, for all vertices u, v ∈ V0, w1(u, v) =
3A weight N denotes a best friend if it is far larger (in ab-solute value) than any weight in W \ −M.
−M if w0(u, v) = −M , w1(u, v) = N if w0(u, v) = 1,w1(u, v) = a if w0(u, v) = 0. As there does not exist any 3-stable configuration for G0, there does not exist any 3-stableconfiguration for G1 either.
Lemma 10. Given two positive integers a, b, letW = −a, b.There exists a graph G = (V,E,w) such that any configura-tion for G is not 2(b+ a+ 1)-stable.
Proof. We emulate the triangle of Lemma 9, this timewith the three weights b+ a+ 1, 2(b+ a) + 3, 3(b+ a+ 1),instead of 2, 3 and 4 respectively. As b+a+1 < 2(b+a)+3 <3(b+a+ 1), and b+a+ 1 + 2(b+a) + 3 = 3(b+a+ 1) + 1 >3(b + a + 1), this change of weights does not make 2-stableconfigurations exist for the counter-example of Lemma 9.However, we also have to emulate a weight 0. To do that,let t1, t2, t3 be any three positive integers that satisfy thefollowing properties:
• t3 ≥ t2 ≥ t1;
• t1 ≥ 5(b+ a+ 1)/max(b− a, 1);
• max(t1b, (t1 +1)a+2(b+a)+3).a ≥ (3(b+a)+2)b+1;
• max(t2b, (t2 + 1)a+ 2(b+ a) + 3).a ≥ [(t1 + 5)(b+ a) +4]b+ 1;
• max(t3b, (t3 + 1)a+ 2(b+ a) + 3).a ≥ [(t2 + 5)(b+ a) +4]b+ 1.
We can note the possible values of those three integers areinfinite. Indeed, the value of t1 can be any value that isgreater than every of its (finite) lower bounds. Furthermore,if the value of t1 is arbitrarily fixed, then we can also choosefor t2 any value that is sufficiently large and, finally, thevalue of t3 can be chosen in the same way, depending on thevalues of t1 and t2. For every 1 ≤ i ≤ 3, we also define thesize si = ti(b+a)+3(b+a+1) = (ti+1)(b+a)+2(b+a)+3.
We now define the graph G = (V,E,w) such that V =V1 ∪ V2 ∪ V3 ∪A1 ∪A2 ∪A3, |A1| = |A2| = |A3| = b+ a+ 1,and for any 1 ≤ i ≤ 3, |Vi| = si, as follows.
For every 1 ≤ i ≤ 3, there are two distinct subcliquesVi,m ⊂ Vi,p ⊂ Vi, with |Vi,m| = tib, |Vi,p| = (ti + 1)b; fur-thermore, for all v, v′ ∈ Vi, w(v, v′) = b.
We also have that w(u, v) = b for any u, v ∈ A1∪A2∪A3.We set:
• w(u, v) = b, for any u ∈ A1, any v ∈ V1 \ V1,m,
• w(u, v) = b, for any u ∈ A2, any v ∈ V2 \ V2,m,
• w(u, v) = b, for any u ∈ A3, any v ∈ V3 \ V3,m.
Moreover,
• w(u, v) = b, for any u ∈ A1, any v ∈ V2 \ V2,p,
• w(u, v) = b, for any u ∈ A2, any v ∈ V3 \ V3,p,
• w(u, v) = b, for any u ∈ A3, any v ∈ V1 \ V1,p.
Every other weight equals −a.
Let C be any stable configuration forG. By Lemma 6, we getsubsets A1, A2, A3, V1,m, V2,m, V3,m, V1 \ V1,p, V2 \ V2,p, V3 \V3,p are subgroups in C.

Claim 8. For every 1 ≤ i ≤ 3, either a ≥ b and |Vi,p| +2(b+a+1) ≤ |Vi\Vi,p|, or b > a and |Vi\Vi,m|+2(b+a+1) ≤|Vi,m|.
By the hypothesis, we have |Vi,p| = (ti + 1)b, hence |Vi \Vi,p| = si−(ti+1)b = (ti+1)(b+a)+2(b+a)+3−(ti+1)b =(ti + 1)a + 2(b + a) + 3; furthermore, |Vi,m| = tib, and so,|Vi \ Vi,m| = si − tib = ti(b + a) + 3(b + a + 1) − tib =tia+ 3(b+ a+ 1).
First if a ≥ b, then |Vi,p|+ 2(b+ a+ 1) = (ti + 1)b+ 2(b+a+ 1) < (ti+ 1)a+ 2(b+a) + 3 = |Vi \Vi,p|, and the claim isproved. Otherwise, the equation |Vi \ Vi,m|+ 2(b+ a+ 1) ≤|Vi,m| is equivalent to the following lines:
tia+ 3(b+ a+ 1) + 2(b+ a+ 1) ≤ tib
5(b+ a+ 1) ≤ ti(b− a)
5(b+ a+ 1)/(b− a) ≤ tiand the claim is also proved, as ti ≥ t1 ≥ 5(b+a+1)/max(b−a, 1).
In the sequel, we denote V ′i = Vi \ Vi,p if a ≥ b, andV ′i = Vi,m if b > a. We recall that V ′i is a subgroup in C.
Claim 9. For any j < i, none of the vertices in Vj is inthe same group as vertices of V ′i .
Any vertex in Vj has at most sj − 1 + 2(b + a + 1) =(tj + 1)(b+ a) + 2(b+ a) + 3 + 2(b+ a+ 1)− 1 = (tj+ 5)(b+a) + 4 friends in its group. Moreover, [(tj+ 5)(b+a) + 4]b <max(tib, (ti+1)a+2(b+a)+3).a = |V ′i |a by the hypothesis.So, the second claim is proved.
Claim 10. Subsets A1 and V ′3 are not in the same groupin C.
By contradiction. Suppose A1 ∪ V ′3 is a subgroup in C.By the previous claim, there can be no vertex of V1 ∪ V2
in the same group as A1. Thus, any vertex of A1 has atmost 2(b+ a+ 1) + b+ a = 3(b+ a) + 2 friends in its group.Furthermore, as |V ′3 |a = max(t3b, (t3+1)a+2(b+a)+3).a ≥(3(b + a) + 2)b + 1, we have that any vertex of A1 has anegative utility, which is a contradiction. So, the third claimis proved.
In the same way, A2 and V1 are not in the same group inC, A3 and V2 are not in the same group in C.
Claim 11. For any 1 ≤ i ≤ 3, Vi is a subgroup in C.
By our first claim, |V3 \ V ′3 |+ 2(b+ a+ 1) ≤ |V3|′, and byour third claim, there can be no vertex u in the same groupas V ′3 such that w(u, v3) = −a for some vertex v3 ∈ V3.Consequently, V3 is a subgroup in C, as any vertex of V3 \V ′3that is not in the same group as C breaks the configuration.It follows that V2 is a subgroup in C, hence V1 is a subgroupin C.
Claim 12. Given an i, 1 ≤ i ≤ 3, if Ai and Vi are inthe same group in C, then for any vertex ui ∈ Ai, we getfC(ui) ≥ 3(b+ a+ 1)b+ (b+ a)b.
It follows from (|Ai| − 1)b + |Vi \ Vi,m|b − |Vi,m|a = (b +a)b+ (tia+ 3(b+ a+ 1))b− tiba = 3(b+ a+ 1)b+ (b+ a)b.
In the same way, if A1 and V2 are in the same group, thenfor any vertex u1 ∈ A1, fC(u1) ≥ (|A1| − 1)b+ |V2 \ V2,p|b−
k(W) W1 −M,a, b, 0 < a < b2 −M,−N, 0, 1∞ −M, b, b > 0; W ⊆ N; W ⊆ −N; W = −N ∪ N;
Table 2: Values of k(W) for different W.
|V2,p|a = (b+a)b+((t2+1)a+2(b+a)+3)b−(t2+1)b = (2(b+a) + 3)b+ (b+ a)b; if A2 and V3 are in the same group, thenfor any vertex u2 ∈ A2, fC(u2) ≥ (2(b+ a) + 3)b+ (b+ a)b;if A3 and V1 are in the same group, then for any vertexu3 ∈ A3, fC(u3) ≥ (2(b+ a) + 3)b+ (b+ a)b.
Finally, for every stable configuration C for G, there isa corresponding configuration C′ for the counter-exampleof Lemma 9; moreover, we can mimic any 2-deviation thatbreaks C′ by a 2(b+ a+ 1)-deviation that breaks C, and so,there does not exist any 2(b+a+ 1)-stable configuration forG.
Table 2 summarizes the most important tight values fork(W). Note in particular that we prove k(W) = ∞ if andonly if we have one of the following cases: W = −M, bwhich is equivalent to the uniform case, W has no negative(or no positive) elements, in which case the game is trivial,and W has only one very large weight N larger than anynegative ones, in which case the stable configuration derivesfrom connected components with edges of weight N .
More formally, let us decompose any set of weightsW intothe set of non negative weights W+ and into the set of nonpositive weights W−.
Lemma 11. k(W) = ∞ if, and only if, W = W+, orW = W−, or W = −M, b, or W = W− ∪ N and−M /∈ W.
Proof. First note that any other W is such that k(W)is upper-bounded, by the lemmas that are above in this sec-tion. We start the proof with a preliminary remark. LetG = (V,E,w) be any graph, and let C be any configurationfor G. For any node u ∈ V , fu(C) ≥
∑v∈V min(w(u, v), 0)
and fu(C) ≤∑v∈V max(w(u, v), 0).
Let W =W+. By the first remark, fu(C) ≤∑v∈V max(w(u, v), 0) for any node u ∈ V and for any con-
figuration C for G. In our case,∑v∈V max(w(u, v), 0) =∑
v∈V w(u, v) because w(u, v) ≥ 0 for any (u, v) ∈ E. LetC = (V ) be the configuration for G composed of 1 group ofsize |V |. For any node u ∈ V , fu(C) =
∑v∈V w(u, v). Thus
C is a k-stable configuration for G.
Let W =W−. By the very first remark, fu(C) ≤∑v∈V max(w(u, v), 0) for any node u ∈ V and for any con-
figuration C for G. In our case,∑v∈V max(w(u, v), 0) =∑
v∈V 0 = 0 because w(u, v) ≤ 0 for any (u, v) ∈ E. LetV = u1, . . . , un. By assumption, for any node u ∈ Vand for any configuration C for G, fu(C) ≤ 0 becausew(u, v) ≤ 0 for any v ∈ V . Let C = (u1, . . . , un) bethe configuration for G composed of |V | groups of size 1. Cis a k-stable configuration for G because fu(C) = 0 for anyu ∈ V .
The case W = −M, b is proved in [9].
LetW =W−∪N such that−M /∈ W. LetG′ = (V,E′) bethe graph induced by the set of arcs E′ = (u, v), w(u, v) =

N, (u, v) ∈ E. Let G1, . . . , Gt be the different connectedcomponents of G′. Given a node u ∈ V , let ΓG′(u) bethe set of neighbors of u in graph G′. Formally ΓG′(u) =v, (u, v) ∈ E′. By the preliminary remark, we get that,for any configuration C for G and for any node u ∈ V ,fu(C) ≤ N |ΓG′(u)|.Let C = (V (G1), . . . , V (Gt)) be the configuration for Gcomposed of the nodes of the different maximal connectedcomponents of G. By Definition of N , fu(C) ≥ max((N −1), 0)|ΓG(u)|.We now prove that C is k-stable. By contradiction. Supposethat there exists a k-deviation. Let C′ be the configurationfor G obtained after the k-deviation. There are two cases.
• A subset S ⊂ V (Gi), for some i, 1 ≤ i ≤ t, |S| ≤ k,forms a new group. In that case, we prove that atleast one node u ∈ S is such that fC′(u) < fu(C). In-deed, consider a node u ∈ S such that ΓG′(u) ∩ S 6=ΓG′(u). Note that there always exists such a node be-cause |S| < |V (Gi)| and V (Gi) is a maximal connectedcomponent of G. Thus, we get fC′(u) ≤ max((N −1), 0)|ΓG′(u)| while fu(C) ≥ max((N − 1), 0)|ΓG′(u)|.So fC′(u) ≤ fu(C). A contradiction.
• A subset S ⊂ V , |S| ≤ k, reaches a group V (Gj), forsome i, 1 ≤ i ≤ t. If V (Gi) ∩ S 6= ∅, then V (Gi) ⊂ S.Otherwise, we would have fC′(u) ≤ fu(C) for someu ∈ V (Gi). Indeed, consider a node u ∈ S suchthat ΓG′(u) ∩ S 6= ΓG′(u). So fC′(u) ≤ max((N −1), 0)|ΓG′(u)| while fu(C) ≥ max((N − 1), 0)|ΓG′(u)|.Thus, if V (Gi) ∩ S 6= ∅, then V (Gi) ⊂ S. Considera set V (Gi), for some i, such that V (Gi) ⊂ S. Inthat case, fu(C) ≤ fC′(u) for any u ∈ V (Gi) becausew(u, v) ≤ 0 for any v ∈ V \ V (Gi). A contradiction.
There does not exist a k-deviation for C and so C is k-stable.
3.3 Intractability with conflict graphsUnder general weights, we proved that it may not be easy
to ensure that all games have a k-stable configuration. Wenow prove a much stronger result: not only is the stabilitynot guaranteed for a given game when k > k(W), but it iscomputationally prohibitive to decide it. We first define:
Definition 6 (k-Stable decision problem). Let k ≥1 and let W be the set of weights. Given a graph G =(V,E,w), does there exist a k-stable configuration?
The following Theorem shows that k(W) determines thecomplexity of the k-Stable decision problem.
Theorem 6. For k ≥ 1 and W containing −M , either
• a k-stable configuration always exists (i.e., k ≤ k(W));
• or the k-Stable decision problem is NP-hard.
A previous result of NP-hardness was used in [9]. However,their proof requires gossip deviations and a large positiveweight N , whereas ours overrules these strong constraints.What we first need to show is that there are instances forour decision problem that are equivalent. Given a set ofweights W such that W+ 6= ∅, wp ∈ W is defined as thelargest positive weight in W.
Then we present two different ways to increase the min-imum utility of the nodes in a graph. In the general case,that minimum utility equals 0. However, we can improve itwith external cliques, in a way that keeps the properties ofthe graph safe. Given a graph G = (V,E,w) and a posi-
tive integer t, we build the graph Gt by adding to the setof vertices n cliques of t nodes. We further impose that allthe nodes in the same t-clique have weight between themand between the vertices in V equal to wp, whereas theyhave a conflict edge with any other vertex in the remainingt-cliques. In so doing, we intuitively increase the minimalutility of the nodes to wpt. Note that the transformationalso keeps the stability properties of the graph safe, whichcan be formalized as follows:
Definition 7. Let W be any set of weights such thatW+ 6= ∅. Given a graph G = (V,E,w) such that n = |V |,and a positive integer t, for every 1 ≤ i ≤ n we can definethe clique graph Ki
t = (Vi, Ei, wi) with t nodes and the set
of weights wp. The graph Gt = (V , E, w) is then built asfollows:
• V = V ∪⋃ni=1 Vi;
• for every 1 ≤ i, j ≤ n, for all ui ∈ Vi, and for all uj ∈Vj, w(ui, uj) = wi(ui, uj) = wp if i = j, w(ui, uj) =−M otherwise;
• for all u, v ∈ V , w(u, v) = w(u, v);
• for all 1 ≤ i ≤ n, for all ui ∈ Vi and for all vertexv ∈ V , w(ui, v) = wp.
Another way is to substitute every vertex in the graph bycliques. By this second process, we get the graph Gα, andit keeps the stability properties of G. Formally:
Definition 8. Let W be any set of weights such thatW+ 6= ∅. Given a graph G = (V,E,w) such that n = |V |,and a positive integer α, for every vertex u ∈ V we can de-fine the clique graph Ku = (Vu, Eu, wu) with α nodes andthe set of weights wp. The graph Gα = (Vα, Eα, wα) isthen built as follows:
• V =⋃u∈V Vu;
• for every u ∈ V , for all u1, u2 ∈ Vu, wα(u1, u2) =wu(u1, u2) = wp;
• for all u, v ∈ V , for all ui ∈ Vu and for all vj ∈ Vv,wα(ui, vj) = w(u, v).
We still have to prove our first transformation keeps thestability properties of the graph safe.
Lemma 12. Let W be any set of weights such that thereare positive weights in W, and k be a positive integer. Givena graph G = (V,E,w), and a positive integer t such thatt > |V |, there exists a k-stable configuration for G if and
only if there exists a k-stable configuration for Gt.
Proof. Let Ck = V1, . . . , Vn be a k-stable configura-tion for G. We claim that C′k = V1 ∪ V (K1
t ), . . . , Vn ∪V (Kn
t ) is a k-stable configuration for Gt. By contradiction.Assume that C′k is not k-stable, and let S be a k-deviationthat breaks C′k. First, we claim that for every 1 ≤ i ≤ n Scannot be a subset of V (Ki
t). This is clear as all the ver-tices in Ki
t have enemies in every non-empty group of C′k

that is not their own group. Thus they cannot break theconfiguration alone, since their utility in C′k is positive andthey are already in the same group. Then it follows thatS′ = S ∩ V (G) 6= ∅. Moreover, we claim that S′ breaksCk. Indeed, after the k-deviation, the vertices in S′ end inthe same group as a (possibly empty) subset of Ki
t for some1 ≤ i ≤ n. Let 1 ≤ j ≤ n such that Vj ∩ (V (G) \ S′) = ∅.Such an integer j exists, because there are at most n non-empty groups in Ck. Then it follows that if we move S′ intothe group Vj it is still a valid k-deviation for C′k, and so, wecan mimic this k-deviation in Ck. A contradiction. There-fore C′k is k-stable.
Conversely, assume that there is no k-stable configurationfor G, whereas there exists a k-stable configuration C′k =V ′1 , . . . , V ′n for Gt. Particularly, for all 1 ≤ i ≤ n, we getthat Ki
t is a subgroup of C′k by Lemma 6. Furthermore,we claim that for all vertex u ∈ V , there exists an integeri ∈ 1, . . . , n such that Ki
t ⊂ Ck(u). This comes from thefact that t > n and that wp is the largest positive weightin W. Let Ck = V ′1 ∩ V (G), . . . , V ′n ∩ V (G) be the un-derlying configuration for G that one can deduce from C′k.By the hypothesis, there exists a k-deviation S that breaksCk. However, we can mimic this deviation in C′k, which isa contradiction because C′k is k-stable. Consequently, theredoes not exist any k-stable configuration for Gt.
We are now able to prove Theorem 6:
Proof. Suppose there exists a graph G0 = (V0, E0, w0)with the set of weights W, such that there does not existany k-stable configuration for G0. We get there are positiveweights, because otherwise the configuration with only sin-gleton groups is k-stable for G0. Moreover, we can assumethat there exists a node x0 ∈ V0 such that the removal of x0makes the existence of a k-stable configuration for the gottensubgraph. Indeed, otherwise, we remove nodes sequentiallyuntil obtaining this property.
Let us choose Ck a k-stable configuration for G0 \ x0. Bythe hypothesis, the configuration Ck ∪ x0 is not k-stablefor G0. Let us define f0 as the maximum utility the vertexx0 can get with only one k-deviation that breaks Ck ∪x0.We can always assume f0 > 0 by using the transformationof Definition 7 if needed. We define two other constants,namely α = d f0
wpe and c0 = 2n0 + 1, with n0 = |V0|.
We can now prove the NP-hardness by using a polynomialreduction for the Maximum Independent Set problem.Let G = (V,E) be a graph, and let c ≥ c0 be an integer. Weidentify G to a graph DG = (V,E,w), such that for all u, v ∈V , w(u, v) = −M if uv ∈ E, and w(u, v) = wp otherwise.Let t be the integer bαc− f0
wpc. We can consider the graphs
G1 = G0t = (V1, E1, w1) and G2 = Gα = (V2, E2, w2).Observe that t > αc− f0
wp−1 ≥ αc−n0−1 ≥ c−n0−1 ≥ n0.
So we can apply Lemma 12 to G1.We build the graph HG = (VH , EH , wH) as follows:
• VH = V1 ∪ V2;
• for all 1 ≤ i ≤ 2, for all ui, vi ∈ Vi, wH(ui, vi) =wi(ui, vi);
• for all u1 ∈ V1, for all v2 ∈ V2, wH(u1, v2) = wp ifu1 = x0, and wH(u1, v2) = −M otherwise.
The transformation above is illustrated in Figure 5 Firstassume that any independent set of G has a size lower than
K3 K3
K3 K3
K3
G1
x0
G0G0\x0
G2
Figure 5: The transformation of an input.
c. Then, there can be no group in a stable configuration withmore than α(c− 1) vertices of V2. Furthermore, α(c− 1) =αc−d f0
wpe−1 ≤ αc− f0
wp−1 < t, and so, the minimum utility
of x0 in G1 is greater than its maximum utility in G2. As aconsequence, C1 can be partitioned into a 1-stable configu-ration for G1 and a 1-stable configuration for G2. Moreover,there is no k-stable configuration for G0 by the hypothe-sis, hence there is no k-stable configuration for G1 either byLemma 12. Therefore, there is no k-stable configuration forHG.
Conversely, assume that there exists an independent setof G with size at least c. By [9], there exists a k-stableconfiguration Cαk for G2 ∪ x0, such that there is a groupAc ∈ Cαk that is a maximum independent set of the conflictgraph of G2 ∪ x0. Furthermore, x0 ∈ Ac, because x0has no conflict within the graph. Observe that G1 \ x0 is
˜(G0 \ x0)t with an extra clique graph Kn0t added. Hence,
both these graphs have the same stable properties. As aconsequence, if Ck = B1, . . . , Bn0−1, then there exists ak-stable configuration Ctk for G1 \ x0 by Lemma 12 that isisomorphic to Ck. We then claim that CHk = Cαk ∪Ctk is a k-stable configuration for HG. Indeed, we have that the utilityof x0 in Cαk is at least wpαc. Moreover, the maximum utilityx0 can get after a k-deviation that breaks Ctk is f0 + wpt =wp(t+ f0
wp) ≤ wpαc.
We can conclude the NP-hardness, as our transformationis polynomial, and the Maximum Independent Set prob-lem is NP-complete [8].
4. EXTENSIONS OF COLORING GAMESAll theoretical model of social dynamics should consider
whether the overall behavior of the model is not too limitedby some simplifying assumptions. We prove this is not thecase, as our results extend to account for various situationsin the formation of social groups.
4.1 Asymmetry and GossipingStudying directed graphs rather than undirected graphs
is a natural generalization. In this case, we may not havethat w(u, v) = w(v, u) for all nodes u, v. However, even ifmodest generalization of the model, asymmetrical weights

in the preference matrix leads to intractability. This canbe seen with a simple digraph D = (u, v, E, w) such thatw(u, v) > 0 whereas w(v, u) < 0. Furthermore, we prove inTheorem 7 that it is NP-hard to decide whether there existsa 1-stable configuration. This result holds even when themaximum number of groups is constant. We use in our re-duction the multi-way partitioning number problem, whichis NP-complete [10].
Theorem 7. For any k ≥ 1, deciding whether there existsa k-stable configuration for a given digraph D = (V,A,w) isNP-hard, even if the number of groups is upper-bounded byany constant g ≥ 2.
Proof. We constrain ourselves to g = 2 in order to easethe proof. This is enough so that we give the intuition ofthe general case.
Consider an instance S of Partition problem. Let us callT =
∑s∈S s. We define the digraph D = (V,A,w) as fol-
lows. The set of vertices is V = S ∪ z, u, v. For alls1, s2 ∈ S we set w(s1, s2) = −s2, w(s1, u) = w(s1, v) =T − s1 + 1, w(u, s1) = w(v, s1) = 0, and finally w(s1, z) =−w(z, s1) = s1. We also set w(u, v) = w(v, u) = −M , thatw(u, z) = w(v, z) = 0, and that w(z, u) = w(z, v) = T + 1.Such a digraph D can be built in polynomial time.
First, in any stable configuration for D, we get that u andv must be in two different groups because they are enemies.Furthermore, for all vertex x /∈ u, v, w(u, x) = w(v, x) =0, and so the other vertices do not matter for u and v. Hencefor any configuration C such that u and v are already intwo different groups, and for any k, there is no subset thatcontains u or v and that may break the configuration.
Moreover, we recall that w(z, s) < 0 for any s ∈ S. Conse-quently, in any configuration C for D such that z is neitherin the same group as u, nor z is in the same group as v, weget that fz(C) ≤ 0, whereas in any configuration C′ suchthat z is in the same group as u or z is in the same group asv, we get that fz(C
′) ≥ 1 because∑s∈S w(z, s) = −T and
w(z, u) = w(z, v) = T + 1.Hence, for any stable configuration for D, we conclude
that either z is in the same group V0 as u, or z is in thesame group V1 as v. Without any loss of generality, supposez in the same group V0 as u. We claim that any vertex sin S must be also in the same group V0 as u and z or inthe same group V1 as v. Indeed, otherwise we would havethat fs(C) ≤ 0, since w(s, s′) ≤ 0 for any s′ ∈ S; howeversuch a configuration C is not 1-stable, because if vertex sjoins the group V1, then fs(C
′) > 0, with C′ being the newconfiguration, due to the fact that w(s, v) = T − s+ 1 > 0,and T − s = −[
∑s′∈S w(s, s′)]. Thus, there can be only two
groups in a stable configuration of D.Let C = V0, V1 be a configuration for D such that u and
v are not in the same group in C, and Si = si ∈ S|si ∈Vi, i ∈ 0, 1. We can assume that S0, S1 is a partitionof S. Let us call Ti =
∑si∈Si si. By definition of w, for
any i ∈ 0, 1, for all vertex si of Si, we get that fsi(C) =T + 1−
∑s′i∈Si
s′i + csi = T − Ti + 1 + csi = T1−i + 1 + csi ,
where the value of csi ∈ 0, si depends on whether z is inVi. In the same way, one can prove that if z is in Vj for somej ∈ 0, 1 then fz(C) = T1−j + 1.
It is important to notice that there is no subset of V thatbreaks the configuration C in creating a new group. Indeed,u and v cannot be part of such a subset, and it cannot
contain z either, because z must be in the group of u orin the group of v. Furthermore, in any subset of S that istaken as a new group, all of the individual utilities are nonpositive, whereas they were positive in the original groups.
Let s ∈ S be a vertex of Vi for some i, such that Ti ≤T1−i. We get that fs(C) ≥ T1−i + 1. Consequently, shas no interest in moving into V1−i, whatever it is a col-lective move or not, because in such a new configuration C′
we get that the new size of group Vi is T ′i ≤ Ti − s, andfs(C
′) ≤ T ′i + s+ 1 ≤ (Ti − s) + s+ 1 = Ti + 1 ≤ T1−i + 1.We prove in a similar way that vertex z has no interest inleaving the group Vi when Ti ≤ T1−i. Therefore if S0, S1 isa solution for the Partition problem, then T0 = T1, that isTi ≤ T1−i for all i ∈ 0, 1, and so for every k ≥ 1 we getthat C is a k-stable configuration for D.
Conversely, let us suppose that S0, S1 is not a solutionfor the Partition problem, that is Ti < T1−i for some i,and let us show that C is not a 1-stable configuration for D.Obviously, z moves into Vi provided z belongs to V1−i. So wenow assume that z is in Vi. Then any singleton s1−i withs1−i ∈ S1−i breaks the configuration , because in the newconfiguration C′ where vertex s1−i has moved into group Viwe get that fs1−i(C
′) = T1−i + 1, that is strictly greaterthan fs1−i(C) = Ti + 1.
Finally, for any k ≥ 1, there is a k-stable configuration Cfor the digraph D if and only if there is a solution to thePartition problem for the set S.
The same kind of pathological deviations arises with gos-sip. In this extension, which is still symmetrical, the nodesthat are willing to merge their groups are allowed to doso. A first negative result has been proved in [9]: whenW = −M, 1, N and N is sufficiently large, it is NP-hardto decide whether a given weighted graph admits a gossip-stable configuration. We prove the same result when W =−M, 0, 1. Thus Theorem 8 shows that gossiping makesthe stability problem intractable, even for slight extensionsof the original model of [9]. For our reduction, we use 3-coloring problem, that consists in determining whether thereexists a proper 3-coloring of a given graph G = (V,E), a wellknown NP-complete problem [3].
Theorem 8. Let W = −M, 0, 1. Deciding whetherthere exists a 2-stable, gossip-stable configuration for a givengraph G = (V,E,w) is NP-hard.
Proof. Let G be an instance for the 3-coloring problem.We define the graph Gc = (V,E,w) as follows. For anyvertex v of G there are five vertices v1, v2, vc1 , vc2 , vc3 in V .We say that vci is a colored vertex, and that it has the colori. There are also three special vertices in V , namely c1, c2and c3.
For any vertex v of G we set w(v1, v2) = 1, w(v1, vc1) =w(v1, vc2) = w(v1, vc3) = 1, w(v2, vc1) = w(v2, vc2) = w(v2, vc3) =1, and w(vc1 , vc2) = w(vc1 , vc3) = w(vc2 , vc3) = −M . Forany vertices u, v in G, and for any i, j ∈ 1, 2, 3, i 6= j, wealso set w(ci, vci) = w(ci, uci) = 1, w(ci, cj) = −M , andw(uci , cj) = w(uci , vcj ) = −M . In the case when u and vare adjacent in G, we set the weights w(vt, ul) = −M , forany t, l ∈ 1, 2. Every other weight equals 0.
We have that, for any i, and for any vertex v of G, vciand ci gossip when they are not in the same group, becausew(vci , ci) = 1 and their enemies are the same. Furthermore,vertices v1 and v2 gossip when they are not in the same group

too. We now suppose there exists a gossip-stable configu-ration C such that none of the vertices vci for i ∈ 1, 2, 3is in the same group as v1 and v2, and we claim that thereis a contradiction. Indeed, all the colored vertices that arein the same group as v1 and v2, if any, have the same colori, because otherwise there would be enemies in the groupand C would not be stable. Thus, there is at least one ver-tex vci that breaks the configuration by joining the groupof v1 and v2, because w(vci , v1) + w(vci , v2) = 2 whereasw(vci , ci) = 1. A contradiction.
Finally, there can be only three groups in any gossip-stableconfiguration for Gc. Moreover, we claim those three groupsare equivalent to a proper 3-coloring of G. Indeed, supposeC is a gossip-stable configuration for Gc, with only threegroups. We have that neither c1 and c2, nor c2 and c3,nor c3 and c1 are in the same group in C, because theyare enemies. Thus we can define a 3-coloring of G in thefollowing way: for every vertex v of G, c(v) = i if, and onlyif, v and ci are in the same group in C, with 1 ≤ i ≤ 3.This 3-coloring is proper, because otherwise there would beenemies in at least one group in C.
Conversely, suppose that we have a proper 3-coloring c ofG. We define the configuration C = V1, V2, V3 as follows.For every 1 ≤ i ≤ 3, ci ∈ Vi, and any colored vertex vci isin Vi too. Furthermore, for all vertex v of G, we have thatv1, v2 ∈ Vc(v). By construction, there is no enemies in any ofthe three groups. Moreover, we claim that there is no gos-siping between any two vertices that are in different groups.Indeed, there can only be gossiping between two vertices vjand vci , with j ∈ 1, 2, i ∈ 1, 2, 3, and vj /∈ Vi; however,the very definition of the configuration C implies that vcihas, at least, one enemy in the group of vj , namely c(v), andso, there is no gossiping at all. To conclude, we claim thatany subset S, |S| ≤ 2, does not break the configuration C.Indeed, the vertices in S can only found a new group in C,by the very definition of the weights w in Gc. Furthermore,for all vertex u ∈ Gc, we have that fu(C) ≥ 1. Hence, thereis no vertex in Gc that can strictly increase its utility by a2-deviation, and so, C is a gossip stable configuration.
4.2 Multi-modal relationshipOur model so far is heavily biased towards pairwise rela-
tionship, as the utility of a player depends on the sum of herinteraction with all other members of the groups. In reality,more subtle interaction occur: one may be interested to in-teract with either friend u and v, but would not like to joina group where both of them are present.
We show how the analysis we present generalize to thiscase. We define a coloring game over a weighted undirectedhypergraph H = (V,E,w), with w a weight function fromPt(V ) to R, where Pt(V ) denotes the subsets in V of sizesat most t. Note that t = ∞ is allowed by our model. Aconfiguration for H is a partition C = (V1, . . . , Vc) of V . Theutility of a node u is now equal to
∑u⊆S⊆C(u),|S|≤t w(S).
We prove in Lemma 13 that 1-stability is guaranteed.Interestingly, the proof uses a different potential function:φ(C) =
∑ci=1
∑S⊆Vi,|S|≤t w(S).
Lemma 13. For every hypergraph H = (V,E,w), thereexists a 1-stable configuration.
Note that this assumed that players of a subset all receivethe same gain. We also have proved that if that is not thecase, the game is not stable even for k = 1.
3
0
2
1
Figure 6: Counter-example for stability in the asym-metrical transitive model.
We give the proof for those new degenerate cases whent = 3.
For every hyperedge u1, u2, u3, let us denote by wu1(u2, u2)the utility received by u1 when u2 and u3 are in the samegroup than u1. That utility comes in addition to w(u1, u2)and w(u1, u3)
Lemma 14. There exists a hypergraph H = (V,E,w),with W = −M, 1 and asymmetrical group relations, suchthat there does not exist any 1-stable configuration for H.
Proof. Consider the hypergraph H = (V,E) depicted inFigure 6 with V = u0, u1, u2, u3 (the node labeled i in thefigure corresponds to ui). We set wui(ui, uj) = 1 for anyi, j ∈ 0, 1, 2, 3, i 6= j. Furthermore, we assume that eachnode has a unique transitive restriction:
• wui(ui+1, ui+2) = −M (i, i + 1, and i + 2 are takenmodulo 4);
• otherwise the transitive utility is 1.
The edges on Figure 6 represent the unique restriction foreach of the four nodes. For example, the blue node u0 doesnot want both u1 and u2 in its group because of the blueedge.
We will prove that there does not exist a 1-stable config-uration C for this instance by considering all the cases.
First, if C is composed by a unique group, then the utilityof each node is −M . Any node can forms its singleton groupto get a utility of 1.
Consider any configuration C composed of one group ofsize 3 and one group of size 1. The first group is composedof ui, ui+1, and ui+2 for some i (the values are taken modulo4). Then, the utility of ui is −M because wui(ui+1, ui+2) =−M . In that case, node ui can strictly improve its utilityby joining the group of ui−1 (its utility will be 2 instead of−M).
Consider any configuration C composed of two groups V1,V2 of size 2. There are two cases. Consider first the casewhere V1 = ui, ui+1 and V2 = ui+2, ui+3 for some i (thevalue are taken modulo 4). In that case, utility of node ui is2 and can be 3 if ui joins the other group V2. Indeed, recallthat the unique transitive restriction for ui is between ui+1
and ui+2: wui(ui+1, ui+2) = −M . The other case is whenV1 = ui, ui+2 and V2 = ui+1, ui+3 for some i (the valuesare taken modulo 4). In that case, ui+2 can strictly improveits utility (from 2 to 3) by joining the other group V2. Again,

the unique transitive restriction for ui+2 is between ui+3 andui.
Finally, if C is composed of four singleton groups, thenany node can strictly improve its utility by joining any ofthe three other nodes (the utility is 2 instead of 1).
If subset of nodes have weights in W = −M, 1 (nodesare either happy to interact to receive gain 1, or they wishto avoid at all cost to form a group containing this subset),all results on uniform games generalize. Formally, it holdsbecause for any group Vj ∈ C, the vertices u in Vj have
a utility∑u⊂S⊆Vj ,|S|≤t w(S) =
∑t−1i=1
(|Vj |−1i
), which is
monotically increasing in the size of their group.If subsets of nodes have weights inW = −M, 0, 1, there
exists a k-stable configuration for a hypergraph H if thegirth of the friendship hypergraph H+ is at least k + 1.Note that it does not imply 2-stability in general becausethe girth of a hypergraph may be 2.
Given a hypergraph H = (V,E,w), we define the friend-ship hypergraph H+ in the same way as the friendship graphin Section 3.1.
A Berge cycle inH+ is a sequence v0, e0, v1, . . . , vp−1, ep−1, v0,such that:
• v0, v1, . . . , vp−1 are pairwise different vertices;
• e0, e1, . . . , ep−1 are pairwise different hyperedges;
• for all 0 ≤ i ≤ p− 1, vi, vi+1 ∈ Ei.
Lemma 15. Let H = (V,E) be an acyclic hypergraph,with c connected components. Then |V | =
∑e∈E(|e|−1)+c.
Proof. First we arbitrarily order the vertices in V , de-noted v0, v1, . . . , vn−1. We build an intersection graph G =(VH , EH) as follows. VH = s0, s1, . . . , sn−1, such that forall 0 ≤ i ≤ n − 1, si = e ∈ E : v0, . . . , vi ∩ e = vi.Moreover, for all 0 ≤ i < j ≤ n − 1, the edge sisj = sjsiis in EH if and only if there is e ∈ si such that vj ∈ e.Observe that such a hyperedge e is necessarily unique be-cause H is acylic. Let us call it ei,j = ej,i. Thus, we get|EH | =
∑e∈E(|e| − 1). Moreover, we claim that GH has the
same number of connected components as H. Indeed, if siand sj are adjacent in GH then vi and vj both belong to ei,jin H by definition of GH . Conversely, suppose that vi and vjare adjacent in H. Let e be a hyperedge such that vi, vj ∈ e.By definition of GH , there exists 0 ≤ i0 ≤ min(i, j) such thate ∈ si0 . Furthermore, si0 is adjacent to both si and sj . Asa consequence, we get there are c connected components inGH . Finally, we claim that GH is acyclic, because any cyclein GH would give a Berge cycle in H. Therefore, we have|VH | = |EH |+ c.
That easy result extends the well-known property of foreststo the hypergraphs. We can now prove the following:
Corollary 3. Given an integer k ≥ 1 and a hypergraphH = (V,E,w) with W = −M, 0, 1, there exists a k-stableconfiguration for H if the girth of the friendship hypergraphH+ is at least k + 1.
The proof is quite the same as for Theorem 5. Conse-quently, there always exists a 2-stable configuration if thefriendship hypergraph is simple, that is the intersection oftwo different hyperedges has size at most 1.
4.3 MultichannelsFinally, one assumption of our model is that nodes form
a partition, hence they are limited to a single channel tointeract with their peers. In reality participants in socialnetworks may engage in multiple groups.
Let C = (V1, V2, . . . , Vc) be a configuration and let C(u) =Vi, u ∈ Ci, 1 ≤ i ≤ c be the set of groups containing nodeu. The utility of u depends on the number of groups that ushares with each peer:
fu(C) =∑v∈V
h (|C(u) ∩ C(v)| , w(u, v)) , (1)
where h(g, w) is a function that measures the utility of shar-ing g groups with a node with weight w.
Note that we assume, without loss of generality, that
h(0, .) = 0 , h(., 0) = 0 and ∀w ∈ Z , h(1, w) = w ,∀g ∈ N , w 7→ h(g, w) is a non-decreasing function,∀w ∈ Z , g 7→ w · h(g, w) is a non-decreasing function.
The last property simply ensures that h(g, w) increases withg when w is positive, and decreases with g when w is neg-ative. As an example: h(g, w) = s(g) · w, for s a non-decreasing function that initially takes values 0 and 1, alwayssatisfies these properties. Especially, when s(g) = Ig>0:
fu(C) =∑v∈V
IC(u)∩C(v)6=∅ · w(u, v) . (2)
A configuration is said to use q channels if each user par-ticipate at most to q groups. We can assume that |C(u)| = qfor any u as a user can always form singleton groups.
Using the same potential function as before, e.g., globalutility, it follows that there always exists a 1-stable config-uration with q channels. It is now natural to wonder whatis the behavior of k(W) when the number of channels ishigher than 1. While it may have none or positive effects,we show that it is not always the case. Indeed, even forW = −M, 1, Lemma 16 proves k(W) ≤ 2 with 2 channelswhile k(W) =∞ with single channel. The idea is to emulatea weight w(u, v) = 0 by forcing nodes u and v to be in apredetermined group.
Lemma 16. There exists a graph G = (V,E,w) withW =−M, 1 such that any configuration with 2 channels for Gis not 3-stable.
Proof. We use the counter-exampleGq=1 = (Vq=1, Eq=1, wq=1)of Lemma 10 for the proof. Note that, for each node u ∈Vq=1, there exists at most one node v ∈ Vq=1 such thatwq=1(u, v) = 0.
Given a clique K = (V,E) or order p > 2|Vq=1|, weset w(u, v) = 1 for any u, v ∈ V . We now assume thatε < 1/p for the rest of the proof, and we construct thegraph Gq=2 = (Vq=2, Eq=2, wq=2) as follows. For any nodeu ∈ Vq=1 such that wq=1(u, v) 6= 0 for any v ∈ Vq=1, we adda copy of K, denoted Ku = (Vu, Eu). We set wq=2(u, x) = 1for any x ∈ Vu. For any edge (u, v) ∈ Eq=1 such thatwq=1(u, v) = 0, we add another copy of K, denoted K(u,v) =(V(u,v), E(u,v)). We set wq=2(u, x) = w2(v, x) = 1 for anyx ∈ V(u,v). Furthermore, we set wq=2(u, v) = 1. Finally, forany graph Ku, with u ∈ Vq=1, we set wq=2(y, x) = −M forany y ∈ Vq=1 \ u and for any x ∈ Vu. Similarly, for anygraph K(u,v), with (u, v) ∈ Eq=1, we set wq=2(y, x) = −Mfor any y ∈ Vq=1 \ u, v and for any x ∈ V(u,v).

First, we get that for any u, v ∈ Vq=1 such that w(u, v) = 0,for any x, y ∈ V(u,v), |C(x) ∩ C(y)| = 2 in any 3-stableconfiguration C = (V1, . . . , Vc) with 2 channels for Gq=2.
As εM > n, we have that any x ∈ V(u,v) cannot be in agroup containing any node y ∈ Vq=2 \ (E(u,v) ∪ u, v).
We first prove that in any 3-stable configuration C =(V1, . . . , Vc) with 2 channels forGq=2, we have |C(x)∩C(y)| 6=1, for any x, y ∈ V(u,v). By contradiction. Assume there ex-ist x, y ∈ V(u,v) such that |C(x)∩C(y)| = 1. Without loss ofgenerality, assume that fx(C) ≥ fy(C). Then, there existsa 1-deviation: y reaches the group Vi such that x ∈ Vi andy /∈ Vi. In that case, fy(C′) > fy(C), where C′ is the con-figuration for Gq=2 after the previous 1-deviation. Indeed,fy(C′) = fx(C) + ε.
Thus, we assume that, in any 3-stable configuration C =(V1, . . . , Vc) with 2 channels forGq=2, we have |C(x)∩C(y)| 6=1, for any x, y ∈ V(u,v). Furthermore, if there exist x, y ∈V(u,v) such that |C(x) ∩ C(y)| = 0, then there exist twogroups Vx1 and Vx2 such that x ∈ Vx1 , x ∈ Vx2 , and Vx1 =Vx2 , and there exist two groups Vy1 and Vy2 such that y ∈Vy1 , y ∈ Vy2 , and Vy1 = Vy2 . Thus, fx(C) = (1 + ε)(|Vx1 | −1), and fy(C) = (1 + ε)(|Vy1 | − 1). Without loss of gen-erality, suppose fx(C) ≥ fy(C). Then, there exists a 1-deviation: y leaves Vy1 and reaches Vx1 . We get fy(C′) =|Vx1 | + |Vy2 | − 1 > fy(C) because ε < 1
p. Thus, in any
3-stable configuration C = (V1, . . . , Vc) with 2 channels forGq=2, we have for any x, y ∈ V(u,v), |C(x) ∩ C(y)| = 2, andso, the claim is proved.
Then, by the choice of 0 < ε < 1/p with p > 2|V1|, there ex-ist two groups Vi and Vj , 1 ≤ i < j ≤ c, such that Vi = V(u,v)
and Vj = V(u,v) ∪ u, v. Indeed, otherwise there exists a 1-deviation for C, because by construction |V(u,v)| > fu(C′),with C′ being any configuration with 2 channels for Gq=1.We obtain the same result for copies Ku. To summarize,after setting the groups from the previously necessary con-ditions for having a 3-stable configuration with 2 channelsfor Gq=1, each node u ∈ V \Vq=1 belongs to exactly 2 groups,and each node u ∈ Vq=1 belongs to exactly 1 group.
Thus, there exists a 3-stable configuration for Gq=2 with 2channels if, and only if, there exists a 3-stable configurationfor Gq=1 with single channel. Indeed, any two nodes u, v ∈Vq=1 such that wq=1(u, v) = 0, are already in a same group.Thus, by the choice of the function h, this mimics a weight εbetween these two nodes for determining the other groups,that is quite the same as a weight 0, because ε is arbitrarilysmall (see Corollary 2). Finally, there does not exists a 3-stable configuration for Gq=2 with 2 channels because theredoes not exist a 3-stable configuration for Gq=1 with singlechannel by Lemma 10.
In the case of general weights, a stability criterion de-pending on q has yet to be found. We prove in Theorem 9that any chaotic behavior may be observed between any twoconsecutive numbers of channels.
Lemma 17. Let W = −M,−4, 2, 6, 7. There exists agraph G = (V,E,w) such that any configuration C with sin-gle channel for G is not 2-stable.
Proof. Let G1 = (V,E,w) be the graph built as follows.Let V = u1, u2, u3, u4. We set w(u1, u2) = w(u1, u3) =−M , w(u1, u4) = 7, w(u2, u4) = 6, w(u3, u4) = 2, andw(u2, u3) = −4.
For any k ≥ 1, any k-stable configuration C with singlechannel for G1 is such that fC(u) ≥ 0 for any u ∈ V . Thus,for any k ≥ 1, the following configurations for G1 are notk-stable:
• C = (u1, u2, u3, u4) as fu3(C) = −2 < 0;
• C = (u1, u2, u3, u4) as fu3(C) = −4 < 0;
• C = (u1, u4, u2, u3) as fu3(C) = −4 < 0;
• any configuration C = (V1, V2, V3, V4) (Vi may be emptyfor some i, 1 ≤ i ≤ 4) such that u1, u2 ∈ Vi and/oru1, u3 ∈ Vi for some i, 1 ≤ i ≤ 4.
Thus, it remains to prove the result for the other config-urations for G1.
• Consider the configuration C = (u1, u2, u3, u4)for G1. C is not 1-stable because u4 can reach groupu1. Indeed, fu4(C′) = fu4(C) + 7 = 7 where C′ =(u1, u4, u2, u3) is the resulting configuration withsingle channel for G1 after this 1-deviation.
• Consider the configuration C = (u1, u4, u2, u3)for G1. C is not 2-stable because u2 and u4 can reachgroup u3. Indeed, fu2(C′) = fu2(C) + 6 − 4 =fu2(C) + 2 = 2 and fu4(C′) = fu4(C) − 7 + 6 + 2 =fu4(C) + 1 = 8 where C′ = (u1, u2, u3, u4) is theresulting configuration for G1 after this 2-deviation.
• Consider the configuration C = (u1, u2, u4, u3)for G1. C is not 1-stable because u4 can reach groupu1. Indeed, fu4(C′) = fu4(C)−6+7 = fu4(C)+1 =7 where C′ = (u1, u4, u2, u3) is the resultingconfiguration for G1 after this 1-deviation.
• Consider the configuration C = (u1, u2, u3, u4)for G1. C is not 1-stable because u4 can reach groupu1. Indeed, fu4(C′) = fu4(C)−2+7 = fu4(C)+5 =7 where C′ = (u1, u4, u2, u3) is the resultingconfiguration for G1 after this 1-deviation.
Finally, any configuration C with single channel for G1 isnot a 2-stable configuration for G1.
Corollary 4. Let W = −M,−4, 2, 6, 7. Given an in-teger q ≥ 1, there exists a graph Gq = (Vq, Eq, wq) such thatany configuration C with q channels for Gq is not 2-stable,whereas there always exists a 2-stable configuration C′ withq′ 6= q channels for Gq.
Proof. We arbitrarily select ε < 1/N . LetG1 = (V1, E1, w1)be the graph that is presented in the proof of Lemma 17(we re-use the same notations for the vertices in G1). Webuild the graph Gq as follows. First, the set of verticesis Vq = V1 ∪ x1, . . . , xq−1. For any u, v ∈ V1, wq(u, v) =w1(u, v). Furthermore, for any 1 ≤ i < j ≤ q−1, w(xi, u4) =w(xj , u4) = N , w(xi, xj) = w(xi, v) = w(xj , v) = −M forany v ∈ V1 \ u4.
We have that, for any q′ < q, Cq′ = (u4, x1, . . . , u4, xq′,u11, . . . , u1q
′, u21, . . . , u2q
′, u31, . . . , u3q
′,
x11, . . . , x1q′−1, . . . , xq′1, . . . , xq′q
′−1,
xq′+11, . . . , xq′+1q′, . . . , xq−11, . . . , xq−1q
′) is a 2-stable
configuration with q′ channels for Gq.However, in any stable configuration Cq with q channels
for Gq, we necessarily have u4, xi as a group in Cq (with-out repetitions), for any 1 ≤ i ≤ q − 1. As there does not

exist any 2-stable configuration with single channel for G1,there does not exist any 2-stable configuration with q chan-nels for Gq.
If q′ = q + 1, then Cq′ = (u4, x1, . . . , u4, xq−1,u4, u1, u4, u2, u11, . . . , u1q
′−1, u21, . . . , u2q′−1,
u31, . . . , u3q′, x11, . . . , x1q
′−1, . . . , xq−11, . . . , xq−1q′−1)
is a 2-stable configuration with q′ channels for Gq.
Finally, if q′ ≥ q+2, then Cq′ = (u4, x11, . . . , u4, x1q′−q−1,
u4, x2, . . . , u4, xq−1, u4, u1, u4, u2, u4, u3, u11, . . . ,u1q
′−1, u21, . . . , u2q′−1, u31, . . . , u3q
′−1, x11, . . . ,x1q+1, x21, . . . , x2q
′−1, . . . , xq−11, . . . , xq−1q′−1) is
a 2-stable configuration with q′ channels for Gq.
Theorem 9. For any sequence of positive integers q1, q2, . . . , qp,and for any sequence 1 ≤ i1 < i2 < . . . < il ≤ p, there existsa graph G = (V,E,w) such that there is a 2-stable config-uration with qj channels for G if, and only if, j 6= it, forevery 1 ≤ t ≤ l.
Proof. For any 1 ≤ t ≤ l, let Gqit be the graph inthe proof of Corollary 4 such that there exists a 2-stableconfiguration with q′ channels for Gqit if, and only if, q′ 6=qit . By convention, G0 is any graph such that there always isa 2-stable configuration with q channels for G0; for instance,we may assume that all the weights for G0 are positive.
Then we build a graph G from G0, Gqi1 , . . . Gqil , such thatany vertices u, v that are not in the same graph Gq are en-emies (e.g. w(u, v) = −M). In so doing, every graph Gqis independent of the other ones, and so, there is a 2-stableconfiguration with q′ channels for G if, and only if, there ex-ists a 2-stable configuration with q′ channels for every Gqit ,1 ≤ t ≤ l.
5. EFFICIENCY STABILITY TRADE-OFFEfficiency of configuration can be estimated through the
sum of utility received by all the players. It has been provedin [9], that computing a maximum configuration is NP-complete even with W = −M, 1. Hence, it does not onlyrequire coordination, but also has a prohibitive computa-tional cost. We first strengthen this result by showing thatthis optimum cannot even be approximated within a poly-nomial multiplicative factor.
Lemma 18. For every 1 > ε > 0, the problem of finding amaximum configuration cannot be approximated within anynε−1-ratio in polynomial time, unless P=NP.
Proof. Let us constraint ourselves to the set of weights−M, 1. By contradiction, suppose there exists a polynomial-time algorithmA, such that for any graphG we have f(A(G)) ≥nε−1OPT (G). We can use algorithm A to compute an in-dependent set of the conflict graph of G. To do this, itsuffices to take the largest group in A(G). Moreover, weknow by [8], the Maximum Independent Set problem
cannot be approximated within any nε2−1-ratio in polyno-
mial time, unless P=NP. Then, if P 6= NP, there are graphsG such that the largest group in A(G) has size lesser than
nε2−1|MIS(G)|, where MIS(G) denotes a maximum inde-
pendent set of the conflict graph of G. Especially, for such agraphG, we have f(A(G)) < n.(n
ε2−1|MIS(G)|−1)n
ε2−1|MIS(G)| <
nε−1(|MIS(G)| − 1)|MIS(G)|. However, the utility of theconfiguration with single group MIS(G) for G is already(|MIS(G)|−1)|MIS(G)|. So, we have f(A(G)) < nε−1OPT (G),which is a contradiction unless P = NP.
uv1,1
u2
u1
uq
v2
v1
vq
uvq,1uv2,1
uv1,2 uv2,2 uvq,2
Figure 7: Representation in the graph G’ of an edge(u,v) with positive weight in Definition 9.
However, we show that using q > 1 channels adds in gen-eral no particular difficulty to that computation. It couldbe useful for classes of graphs for which we have a goodapproximation to find a maximum configuration.
Definition 9. For any graph G = (V,E,w) with W ⊆−M ∪ N, let G′ = (V ′, E′, w′) be as follows.a) For any u ∈ V , we have q nodes u1, u2, . . . , uq ∈ V ′ andwe set w′(ui, uj) = −M for any i, j, 1 ≤ i < j ≤ q;b) For any u, v ∈ V such that w(u, v) ∈ −M, 0, we setw′(ui, vj) = w(u, v) for any i, j, 1 ≤ i, j ≤ q;c) For any u, v ∈ V such that w(u, v) > 0, for any g,1 ≤ g ≤ q, we have two nodes uvg,1, uvg,2 ∈ V ′, as shown inFigure 7, such that for any i, j, 1 ≤ i, j ≤ q:• w′(ui, uvg,1) = w′(vi, uvg,1) = (h(g, w(u, v))−h(g−1, w(u, v)))/2;• w′(ui, vj) = 0;• w′(uvg,1, uvg,2) = 3(h(g, w(u, v))− h(g − 1, w(u, v)))/4;• w′(y, uvg,2) = −M , ∀y /∈ uvg,1, uvg,2;• w′(uvg,1, uvg′,1) = −M , ∀g′ 6= g, 1 ≤ g′ ≤ q;• w′(y, uvg,1) = 0,∀y /∈ui, vi, uvg′,1, uvg,2, 1≤ i, g′≤ q.
Let C′ be a maximum single channel configuration in G′.Note that |C′(ui) ∩C′(uj)| = 0 for any i 6= j, and |C′(ui) ∩C′(vj)| = 1 if, and only if, a unique uvg,1 exists such that|C′(ui)∩C′(uvg,1)∩C′(vj)| = 1. From C′ we can then builda configuration C with q channels by replacing all nodes uiby u and deleting all nodes uvx,1 and uvx,2. The proofconcludes by proving that C′ is not maximum if C isn’t.Formally:
Theorem 10. Assume h concave. From a maximum con-figuration with single channel for G′, we deduce in lineartime a maximum configuration with q channels for G.
Proof. Let C = (V1, . . . , Vc) be any maximum configura-tion with single channel for G′. Note that for any u, v ∈ V ′,then |C(ui) ∩ C(uj)| ∈ 0, 1. We prove several propertiesfor C.
a) For any u ∈ V , we have |C(ui) ∩ C(uj)| = 0 for anyi, j, 1 ≤ i < j ≤ q, because w′(ui, uj) = −M .
b) For any u, v ∈ V such that w(u, v) = −M , we have|C(ui) ∩ C(vj)| = 0 for any i, j, 1 ≤ i, j ≤ q, becausew′(ui, vj) = −M .
c) For any u, v ∈ V such that w(u, v) > 0, if there existi, j, 1 ≤ i, j ≤ q, such that |C(ui) ∩ C(vj)| = 1, then thereexists x, 1 ≤ x ≤ q, such that |C(ui) ∩ C(vj) ∩ C(uvx,1)| =1. By contradiction. If |C(ui) ∩ C(vj)| = 1 and |C(ui) ∩C(vj) ∩ C(uvx,1)| = 0 for any x, 1 ≤ x ≤ q, then thereexists a a configuration C′ with single channel for G′ suchthat f(C′) > f(C). Indeed, we proved before that |C(ui′)∩

C(uj′)| = 0 and |C(vi′) ∩ C(vj′)| = 0 for any i′, j′, 1 ≤i′ < j′ ≤ q. Thus, there exists x, 1 ≤ x ≤ q, such that|C(uvx,1) ∩ C(ui′)| = 0 and |C(uvx,1) ∩ C(vi′)| = 0 for anyi′, 1 ≤ i′ ≤ q. We get two cases:
1. if |C(uvx,1) ∩ C(y)| = 0 for any y ∈ V ′, then we adduvx,1 in the group of ui and vj and we get f(C′) =f(C) + 2(h(x,w(u, v))− h(x− 1, w(u, v))).
2. if |C(uvx,1)∩C(uvx,2)| = 1, then |C(uvx,1)∩C(y)| = 0for any y ∈ V ′ by construction of G′. Thus, we adduvx,1 in the group of ui and vj and we get f(C′) =f(C)+2(h(x,w(u, v))−h(x−1, w(u, v)))−6(h(x,w(u, v))−h(x− 1, w(u, v)))/4 > f(C).
d) For any u, v ∈ V such that w(u, v) > 0, if there existi, j, x, 1 ≤ i, j, x ≤ q, such that |C(ui)∩C(vj)∩C(uvx,1)| =1, then for any x′ < x, there exists i′, j′, 1 ≤ i′, j′ ≤ q, suchthat |C(ui′) ∩ C(vj′) ∩ C(uvx′,1)| = 1. By contradiction. Ifthere exists x′ < x such that |C(ui′)∩C(vj′)∩C(uvx′,1)| = 0for any i′, j′, 1 ≤ i′, j′ ≤ q, then there exists a configurationC′ with single channel for G′ such that f(C′) ≥ f(C). Ash is concave, we have h(x′, w(u, v)) − h(x′ − 1, w(u, v)) ≥h(x,w(u, v)) − h(x − 1, w(u, v)) because x′ < x. There arethree cases.
1. Without loss of generality, if for some i′, 1 ≤ i′ ≤ q,|C(ui′)∩C(uvx′,1)| = 1, and so |C(vj′)∩C(uvx′,1)| = 0for any j′, 1 ≤ j′ ≤ q, then we add uvx′,1 to the groupof ui and vj , and we add uvx,1 to the group with uvx,2.We get the configuration C′ such that f(C′) = f(C)−(h(x′, w(u, v))−h(x′− 1, w(u, v))) + 2(h(x′, w(u, v))−h(x′−1, w(u, v)))−2(h(x,w(u, v))−h(x−1, w(u, v)))+6(h(x,w(u, v)) − h(x − 1, w(u, v)))/4 > f(C) because|C(uvx′,1) ∩C(uvx′,2)| = 0 and because h is such thath(x′, w(u, v))−h(x′−1, w(u, v)) ≥ h(x,w(u, v))−h(x−1, w(u, v)).
2. If |C(ui′)∩C(uvx′,1)| = 0, |C(vj′)∩C(uvx′,1)| = 0 forany i′, j′, 1 ≤ i′, j′ ≤ q, and |C(uvx′,1)| ∩ C(uvx′,2)| =0, then we add uvx′,1 to the group of ui and vj , and weadd uvx,1 to the group with uvx,2. We obtain the con-figuration C′ such that f(C′) = f(C)−2(h(x,w(u, v))−h(x−1, w(u, v)))+2(h(x′, w(u, v))−h(x′−1, w(u, v)))+6(h(x,w(u, v)) − h(x − 1, w(u, v)))/4 > f(C) by thechoice of h.
3. If |C(ui′)∩C(uvx′,1)| = 0, |C(vj′)∩C(uvx′,1)| = 0 forany i′, j′, 1 ≤ i′, j′ ≤ q, and |C(uvx′,1)∩C(uvx′,2)| = 1,then we add uvx′,1 to the group of ui and vj , and weadd uvx,1 to the group with uvx,2. We obtain the con-figuration C′ such that f(C′) = f(C)−2(h(x,w(u, v))−h(x−1, w(u, v)))+2(h(x′, w(u, v))−h(x′−1, w(u, v)))−6(h(x′, w(u, v))−h(x′−1, w(u, v)))/4+6(h(x,w(u, v))− h(x− 1, w(u, v)))/4 > f(C) by the choice of h.
To summarize, any maximum configuration C for G′ issuch that: for any u ∈ V , |C(ui) ∩ C(uj)| = 0 for anyi, j, 1 ≤ i, j ≤ q; for any u, v ∈ V such that w(u, v) = −M ,|C(ui)∩C(vj)| = 0 for any i, j, 1 ≤ i, j ≤ q; for any u, v ∈ Vsuch that w(u, v) > 0, then there exists x, 0 ≤ x ≤ q,such that for any x′ ≤ x, there exists i, j, 1 ≤ i, j ≤ q,such that |C(ui) ∩ C(vj) ∩ C(uvx′,1)| = 1, and for x′ > x,|C(uvx′,1) ∩ C(uvx′,2)| = 1 and so |C(uvx′,1)| = 2.
We get that any maximum configuration C for G′ is suchthat f(C) = c(C) + f ′(C) where c(C) is the constant
∑u,v∈V,w(u,v)>0
∑qx=1 6(h(x,w(u, v))− h(x− 1, w(u, v)))/4
and f ′(C) =∑u,v∈V,w(u,v)>0
∑qx=1 I∃i,j,|C(ui)∩C(uj)|=1
2(h(x,w(u, v))− h(x− 1, w(u, v)))/4.We now construct the corresponding configuration Cq for
G. For any Vj ∈ C, we construct the group Vj′ ∈ Cq asfollows. For any u ∈ V , u ∈ Vj′ if, and only if, there existsi, 1 ≤ i ≤ q, such that ui ∈ Vj . Clearly, the construction ofG′ and the construction of Cq can be done in linear time onthe size of G.
By construction, we get that f(Cq) = 4f ′(C).We now prove that if C with single channel is maximum
for G′, then Cq with q channels is maximum for G. SupposeC is maximum for G′. By contradiction. Suppose thereexists a configuration C′q with q channels for G such thatf(C′q) > f(Cq). We prove that there exists a configurationC′ with single channel for G′ such that f(C′) > f(C). Weconstruct C′ as follows. For any Viq ∈ C′q, we construct thegroup Vi′q for C′ as follows: sequentially, for any u, v ∈ Viq ,
there exist i, j, 1 ≤ i, j ≤ q such that ui and uj are not yetin one group in C′. If there exist, we choose ui and/or vjthat are yet in group Vi′q . Furthermore, if w(u, v) > 0, we
choose the smallest x, 1 ≤ x ≤ q, such that uvx,1 is not yetin one group in C′. We add ui, uj , and uvx,1 in group Vi′q .
We get that f(C′) = c(C′) + f ′(C′) where c(C′) = c(C)and f ′(C′) = f(C′q)/4 by construction.
Thus, we get f(C′) > f(C) because f ′(C′) > f ′(C). Acontradiction because C is maximum for G′. Finally, Cqwith q channels is maximum for G.
Note that, in our extended model with multichannels, thetotal utility of the players can only improve as the numberof channels q gets larger, because more configurations areavailable. Unfortunately, we also prove that computing theminimum number of channels that guarantee a given thresh-old global utility is hard to approximate.
Theorem 11. Given U ≥ 1, computing q∗, the minimumq for which there exists a configuration C satisfying f(C) ≥U , cannot be approximated within |V |1−ε for any ε > 0 inpolynomial time, unless P=NP.
Proof. We construct the graph G = (V,E,w) as follows.Let G1 = (V1, E1, w1) be any graph such that w1(u, v) ∈−M, 0 for any u, v ∈ V1. Let V = V1∪u, v1, v2, . . . , v|V1|.We set w(u, x) = N for any x ∈ V1. We set w(u, vi) = 1 forany i, 1 ≤ i ≤ |V1|. We set w(vi, x) = −M for any x ∈ V1
and for any i, 1 ≤ i ≤ |V1|.Let U = 2|Vi|. Thus, if there exists a configuration C forG
with q channels such that f(C) ≥ U , then |C(u)∩C(x)| ≥ 1for any x ∈ V \ u. Indeed there are exactly 2|Vi| edgeswith weights 1. Thus, by construction of G, the problemremains to minimize the number of groups containing nodeu. Clearly by construction, we have |Vi| groups of size 2composed of u, vi for any i, 1 ≤ i ≤ |Vi|. Then, u mustbe in one group with each x ∈ V1. As w1(u, v) ∈ −M, 0for any u, v ∈ V1, then we have to partition the nodes V1
into groups without arcs with weight −M , and we have tominimize the number of groups. Thus, the problem remainsto find the chromatic number of the graph induced by arcswith weight −M . As for all ε > 0, approximating the chro-matic number within n1−ε is NP-hard [12], then we get theresult.
However, in spite of this complexity, we prove that col-lusions and multiple channels have in general a beneficial

effect on the price of anarchy, which is the ratio of the worststable equilibrium to this optimal. Nash Equilibria obtainedby the dynamic of the system satisfy a general bound thatimproves with q, in contrast with worst Nash Equilibria thatare always arbitrarily bad. Finally, we show that higher or-der stability, although it is significantly harder to obtain ingeneral, potentially improve this bound significantly.
5.1 Efficiency of Nash EquilibriumSince we proved, there is few hope we can compute effi-
cient configurations in polynomial time, our goal is now tostudy the efficiency of any stable configuration, and espe-cially the ones that we can compute by using our dynamicsystem.
We start by studying the efficiency of the largest classof stable configurations: Nash Equilibria (k = 1). For anygraph G, we denote by C+ a maximum configuration; theworst case C−k denotes a configuration with the minimumutility that is obtained in a k-stable configuration using qchannels. We first show in Lemma 19 that Nash Equilibriacan be arbitrarily bad:
Lemma 19. Let a, b > 0 be two integers. With W ⊇−M, 0, b or W ⊇ −a, b, for any R ≥ 1, there are graphsG = (V,E,w) with f(C+) ≥ R and f(C−1 ) = 0.
Proof. a) Case −M, 0, b ⊆ W.
Let n′ ≥√R/2b be an integer. Let G = (V,E,w) with
V = V1 ∪ V2 ∪ v1, v2, such that |V1| = |V2| = n′. Forany u, v /∈ v1, v2, we set w(u, v) = b if u and v are notin the same subset Vi, and w(u, v) = 0 otherwise. More-over, v1 (v2, respectively) is enemy with any vertex of V2
(V1, respectively), and for any u ∈ V1, any v ∈ V2, wehave w(u, v1) = w(v, v2) = w(v1, v2) = 0. ConfigurationC containing (V1 ∪ v1, V2 ∪ v2) q times is 1-stable forG and f(C) = 0.4 Furthermore, a maximum configurationwith single channel for G is C+ = (V1 ∪ V2, v1, v2) andf(C+) = 2bn′2 ≥ R.
b) Case −a, b ⊆ W.Let n′ ≥ R
2b(b+a)be an integer. Let d = 2n′b, and n =
2n′(b + a) + 1. First observe that n > d. We claim thatthere exists a d-regular graph G with n vertices. Indeed, letus choose G such that the vertices in G are labeled by theintegers of Zn; for all i, j ∈ Zn, there is an edge (i, j) in Gif, and only if, j ≡ i− d/2 +α (mod n), for every 0 ≤ α ≤ dsuch that α 6= d/2.
We now define the graph G′ = (V,E,w) as follows. Thevertices in G′ are the vertices in G. For all i, j ∈ Zn, i 6=j, w(i, j) = −a if (i, j) is an edge of G, and w(i, j) = botherwise.
We have that C = (V ) is a 1-stable configuration withsingle channel for G′. Furthermore, for all i ∈ Zn, fi(C) =−da+ (n− d− 1)b = 0.
On the other hand, Cp = (0, 1, 2, 3, . . . , n − 3, n −2, n − 1) is a configuration with single channel for G′
such that f(Cp) = b(n− 1) ≥ R.
On the other hand, such situation is an oddity as precisedin Lemma 20. We denote by Cd−
1 the worst equilibriumobtained under the dynamic of the system. Recall that wpis the maximum weight of W.4This holds, for instance, if we choose h(0, w) = 0, h(g +1, w) = w for the proof.
Lemma 20. Given integers q, n ≥ 1 and a setW such thatW+ 6= ∅, for any graph G = (V,E,w) such that |V | ≤ n, wehave f(C+)/f(Cd−
1 ) = O(h(q, wp)n).
Proof. Let G = (V,E,w) be a graph with m+ the num-ber of edges with positive weights. We choose G as an inputfor the greedy algorithm. It takes s ≥ 0 steps for comput-ing a 1-stable configuration Cs with q channels for G. Notethat f(Cs) ≥ s because the global utility strictly increasesat each step (Theorem 4).
Let us denote Vs the set of nodes u such that there is atleast one of their q groups in Cs that is not a singleton group.We prove that ns ≤ 2s, where ns = |Vs|. Indeed, at eachstep of the algorithm, any vertex v has at most one of itssingleton groups that has been modified into another, largergroup. Furthermore, any such step modifies the singletongroups of at most two distinct vertices.
As a consequence, there are at most nns ≤ 2sn edges(u, v) in A such that w(u, v) > 0 and either u ∈ Vs orv ∈ Vs. Moreover, note that there does not exist any coupleof vertices u, v ∈ V \ Vs, such that w(u, v) > 0, becauseCs is 1-stable. Hence, 2sn ≥ m+, and so f(C+)/f(Cs) ≤2h(q, wp)m+/s = O(h(q, wp)n).
The upper-bound above, if it were tight, would imply thatincreasing of the number of channels might deteriorate thequality of the lowest computable Nash Equilibria. On thecontrary, we prove in Lemma 21 that the number of channelsmay have a positive impact for some sets of weights.
Lemma 21. Given integers q, n ≥ 1 and a set W =W+∪−M such that W+ 6= ∅, for any graph G with at most nnodes, we have f(C+)/f(C−,gr1 ) = O((1 + 2n/q)h(q, wp)).
Proof. Notations are the same as for the previous proofof Lemma 20. We set m+ = m1,+ +m0,+, where m1,+ is thenumber of edges (u, v) such that w(u, v) > 0 and Cs(u) ∩Cs(v) 6= ∅, and m0,+ is the number of edges (u′, v′) such thatw(u′, v′) > 0 whereas Cs(u
′) ∩ Cs(v′) = ∅, respectively. Byinduction on the number of steps of the greedy algorithm,we get that for every two vertices u, v such that w(u, v) =−M , Cs(u) ∩ Cs(v) = ∅, because the constant M is largeenough so that u would avoid at any cost to interact withv, and reciprocally. As a consequence, we have f(Cs) ≥max(s,m1,+). Furthermore, we denote Vq the set of verticessuch that none of their q groups in Cs is a singleton group,and we get |Vq| ≤ 2s/q. As Cs is 1-stable by the hypothesis,there does not exist any couple of vertices u, v ∈ V \ Vq,such that w(u, v) > 0 whereas Cs(u) ∩ Cs(v) = ∅ and, so,m0,+ ≤ 2sn/q ≤ 2nf(Cs)/q.
Finally, f(C+)f(Cs)
≤ 2h(q, wp)m+
f(Cs)= 2h(q, wp)
m1,++m0,+
f(Cs)≤
2h(q, wp)(1 + 2nq
).
5.2 Efficiency of higher order stabilityIncreasing k beyond 1 restricts further the set of sta-
ble configurations; they may even sometimes cease to ex-ist. However, before this happens, we can expect the worstcase configurations, and hence our general bounds, to im-prove. We prove in Theorem 12 that it is generally thecase considering single channel case (the existence of a sta-ble configuration is not guaranteed, but the result holds ifit exists).
Theorem 12. Given W, any graph G = (V,E,w) withweights in W satisfies, f(C+)/f(C−k ) = O(∆+) for k ≥ 2,where ∆+ = maxv∈V | u | w(u, v) > 0 |.

Proof. Again, let m+ be the number of edges (u, v) ∈ Esuch that w(u, v) > 0. We have that f(C+) ≤ 2m+wp.Moreover, for every edge (u, v) of E such that w(u, v) > 0,for any k-stable configuration Ck for G, either fu(Ck) > 0or fv(Ck) > 0. Indeed, suppose fu(Ck) = fv(Ck) = 0. Thenu, v breaks Ck by founding a new group, which is a contra-diction. Thus, there is at least m+/∆+ vertices v of V suchthat fv(Ck) > 0, as the same node cannot be counted morethan ∆+ times. Consequently, f(C+)/f(C−k ) = O(∆+) =O(|V |).
In other words, we show that for k ≥ 2 stable configura-tions are with a multiplicative factor of the optimal givenby the maximum degree of a node. The result also holdsfor k = 1, for any W such that neither −M, 0, b ⊆ Wnor −a, b ⊆ W. Indeed, in this case, if there exist u, vsuch that fu(C) = fv(C) = 0, whereas w(u, v) > 0, then ucan reach the group of v, or vice-versa, and so, there is a1-deviation.
We define the price of k-anarchy pa(n, k) as the greatestratio f(C+)/f(C−k ) obtained for a graph G of n nodes. Byconsidering a worst case degree, we have pa(n, k) = O(n).For a given k, this bound is tight: we can even construct agraph with W ⊆ N and any other non trivial weights suchthat f(C+)/f(C−k ) = Ω(n).
Lemma 22. Let k be any integer k ≥ 2. Given integersa, b, b′, 0 < b′ < b, a, then there is graph G:
• with W ⊃ −a, b, f(C+)
f(C−k
)≥
(k+1)b n(k+1)2
c−1
k.
• with W ⊃ b, b′, f(C+)
f(C−k
)≥ 1 + b′
b
kb(b nkbc−1)
kb−1.
Proof. a) Case W ⊃ −a, b
Let n′ = (k + 1)2b n(k+1)2
c ≤ n. We build a network G =
(V,E,w) such that |V | = n′, as follows. The vertices in Vare labeled vi,j , with 1 ≤ i ≤ k + 1, and with 1 ≤ j ≤n′/(k + 1). For every 1 ≤ i ≤ k + 1, the row Li is the setvi,1, vi,2, . . . , vi, n′
k+1. In the same way, for every 1 ≤ j ≤
n′
k+1, the column Cj is the set v1,j , . . . , vk+1,j. Further-
more, vertices vi,j and vl,t are friends, that is w(vi,j , vl,t) =b > 0, if, and only if, either i = l or j = t. Otherwise,w(vi,j , vl,t) = −a ≤ 0.
Let Ca = (L1, L2, . . . , Lk+1) be a configuration for G. We
have f(Ca) = n′b( n′
k+1− 1). On the other hand, we present
Cb = (C1, C2, . . . , C n′k+1
), and we claim that Cb is a k-
stable configuration for G. Indeed, observe that for any
1 ≤ j ≤ n′
k+1, any vertex vi,j ∈ Cj has one, and only one
friend, in any other column. Hence, if vi,j were part of asubset S that breaks Cb, then after the k-deviation, vi,jwould have, at most, k friends in its group, which is al-ready the case in Cj . As a consequence, there is no vertexthat can strictly increase its utility by a k-deviation, andso, the claim is proved. However, f(Cb) = n′bk. Finally,
f(C+)
f(C−k
)≥ f(Ca)
f(Cb)=
n′k+1−1
k=
(k+1)b n(k+1)2
c−1
k.
b) Case W ⊃ b, b′
Let n′ = kbb nkbc. We build the network G = (V,E,w) with
W, such that |V | = n′ as follows. We partition the set of
vertices V into n′
kbparts, denoted A1, A2, . . . , An′
kb, of equal
size kb. For every couple of vertices u, v, w(u, v) = b if u and
v are in the same part Ai, with 1 ≤ i ≤ n′
kb, and w(u, v) = b′
otherwise.Obviously, a maximum (stable) configuration forG is Ca =
(V ), and f(Ca) = n′[b(kb− 1) + b′(n′ − kb)].Furthermore, we claim that Cb = (A1, A2, . . . , An′
kb) is a
k-stable configuration too. Indeed, any vertex v that mightbreak the configuration Cb, by joining a coalition S whosesize is greater or equal to k, would have its individual utilityafter the deviation that is at most (k − 1)b+ kbb′ = kb(1 +b′) − b ≤ kb2 − b = (kb − 1)b. Hence Cb is k-stable, andf(Cb) = n′b(kb− 1).
Finally, f(Ca)f(Cb)
= 1 + b′
bn′−kbkb−1
= 1 + b′
b
kb(b nkbc−1)
kb−1.
6. REFERENCES[1] L. Blume, D. Easley, J. M. Kleinberg, R. Kleinberg,
and E. Tardos. Network formation in the presence ofcontagious risk. In Proceedings of ACM EC, 2011.
[2] T. Brylawski. The lattice of integer partitions.Discrete Mathematics, 6(3):201 – 219, 1973.
[3] D. P. Dailey. Uniqueness of colorability andcolorability of planar 4-regular graphs arenp-complete. Discrete Mathematics, 30(3):289 – 293,1980.
[4] A. Galeotti and S. Goyal. The law of the few.American Economic Review, 100(4):1468–1492, 2010.
[5] E. Goles and M. A. Kiwi. Games on line graphs andsand piles. Theoretical Computer Science, 115(2):321 –349, 1993.
[6] M. Jackson. A survey of models of network formation:Stability and efficiency. Group Formation inEconomics: Networks, Clubs and Coalitions, 2003.
[7] S. Kairam, M. Brzozowski, D. Huffaker, and E. Chi.Talking in circles: selective sharing in google+. InProceedings of ACM CHI, May 2012.
[8] R. Karp. Reducibility among combinatorial problems.In R. Miller and J. Thatcher, editors, Complexity ofComputer Computations, pages 85–103. 1972.
[9] J. M. Kleinberg and K. Ligett. Information-Sharingand Privacy in Social Networks. paper in progress(available at arxiv.org/abs/1003.0469), 2010.
[10] R. Korf. Multi-way number partitioning. InternationalJoint Conference on Artificial Intelligence, 2009.
[11] F. Ming, F. Wong, and P. Marbach. “Who Are YourFriends?”—A Simple Mechanism that Achieves PerfectNetwork Formation. INFOCOM, 2011 ProceedingsIEEE, pages 566–570, 2011.
[12] D. Zuckerman. Linear degree extractors and theinapproximability of max clique and chromaticnumber. Theory of Computing, 3(1):103–128, 2007.