Embed Size (px)
Citation preview

Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018Published online in Wiley InterScience (www.interscience.wiley.com) DOI: 10.1002/asjc.0000
CONTROLLED TRACKING IN URBAN TERRAIN: CLOSING THE
LOOP
Patricia R. Barbosa, Yugandhar Sarkale, Edwin K. P. Chong, Yun Li, Sofia Suvorova and Bill Moran
ABSTRACT
We investigate the challenging problem of integrating detection, signalprocessing, target tracking, and adaptive waveform scheduling with lookaheadin urban terrain. We propose a closed-loop active sensing system to addressthis problem by exploiting three distinct levels of diversity: (1) spatial diversitythrough the use of coordinated multistatic radars; (2) waveform diversityby adaptively scheduling the transmitted waveform; and (3) motion modeldiversity by using a bank of parallel filters matched to different motion models.Specifically, at every radar scan, the waveform that yields the minimum traceof the one-step-ahead error covariance matrix is transmitted; the receivedsignal goes through a matched-filter, and curve fitting is used to extractrange and range-rate measurements that feed the LMIPDA-VSIMM algorithmfor data association and filtering. Monte Carlo simulations demonstrate theeffectiveness of the proposed system in an urban scenario contaminated bydense and uneven clutter, strong multipath, and limited line-of-sight.
Key Words: Detection, filtering, scheduling, sensing system, signal process-ing, tracking.
I. INTRODUCTION
Tracking airborne targets using sensors has beena well-researched field. Historically, the early effortsbegan before the advent of World War II and gainedprecedence in the actual period of war. The field has
Manuscript received April 30, 2018.Patricia R. Barbosa is with Rockwell Collins, Richardson, TX
75082, USA (e-mail: [email protected]).Yugandhar Sarkale (corresponding author, e-mail: Yugand-
[email protected]), and Edwin K. P. Chong (e-mail: [email protected]) are with the Departmentof Electrical and Computer Engineering, Colorado StateUniversity, Fort Collins, CO 80523-1373, USA.
Yun Li is with Hillcrest Labs, Rockville, MD 20850, USA.Sofia Suvorova (e-mail: [email protected]),
and Bill Moran (e-mail: [email protected]) are withthe Department of Electrical and Electronic Engineering,University of Melbourne, Parkville, Vic 3010, Australia.
This research was supported in part by DARPA undercontract FA8750-05-2-0285.
The material in this paper was presented in part at the SPIEConference on Signal and Data Processing of Small Targets,Orlando, FL, March 17-20, 2008.
evolved to incorporate new advancements, and thetechnology has matured in the ensuing decades. Whilelot of work has been done in tracking airborne targets,tracking ground targets has drawn sustained attentionin the past two decades. Moreover, tracking groundtargets in urban terrain poses a new set of challengesand remains relatively unexplored. Target mobilityis constrained by road networks, and the quality ofmeasurements is affected by dense and uneven clutter,strong multipath, and limited line-of-sight. In addition,targets can perform evasive maneuvers or undergo atrack swap owing to congested environments.
Traditionally, the approach to tracking systemsdesign has been to treat sensing and tracking sub-systems as two completely separate entities. Whilemany of the problems involved in the design of suchsub-systems have been individually examined in theliterature from a theoretical point-of-view, very littleattention has been devoted to the challenges involvedin the design of an active sensing platform thatsimultaneously addresses detection, signal processing,tracking, and scheduling in an integrated fashion.
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls [Version: 2008/07/07 v1.00]
arX
iv:1
805.
0020
2v1
[ee
ss.S
P] 1
May
201
8

2 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
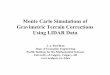
In this work, we intend to fill this gap by proposinga closed-loop active sensing system for the urbanterrain that integrates multitarget detection and tracking,multistatic radar signal processing, and adaptivewaveform scheduling with a one-step-lookahead. Theproposed system simultaneously exploits three distinctlevels of diversity: (1) spatial diversity through theuse of coordinated multistatic radars; (2) waveformdiversity by adaptively scheduling the transmitted radarwaveform according to the urban scene conditions;and (3) motion model diversity by using a bankof parallel filters, each one matched to a differentmotion model. Specifically, at each radar scan, thewaveform that yields the minimum trace of theone-step-ahead error covariance matrix is transmitted(termed as one-step-lookahead); the received signalgoes through a matched-filter, and curve fitting isused to extract measurements that feed the LMIPDA-VSIMM algorithm for data-association and filtering.The overall system is depicted in Fig. 1. Thisfeedback structure is fundamentally different fromthe conventional designs where processing is donesequentially without any feedback.
imaging
tracks
estimation measurements
initiationtrack
maintenancetrack
schedulingmodesdiversity
systemradar
detection &
Fig. 1. Systems-level architecture of the proposed closed-loop activesensing platform.
The primary motivation behind this work isthe urban battlefield presented to military forces;however, multiple applications in the transportation,communications, and radiolocation industries (e.g.,urban vehicular sensing platforms) would also benefitfrom effective solutions to the problem of targettracking in urban terrain. The interdisciplinary natureof this work highlights the challenges involved indesigning a closed-loop active sensing platform fornext-generation tracking and surveillance systems.Further, our work also highlights the importance ofincorporating different diversity modes under unfavor-able environmental conditions in such platforms.
The remainder of this work is organized as follows.Section II presents a discussion on the state-of-the
art and past research on active sensing systems fortarget tracking. In Section III, we state our modelingassumptions. Section IV describes the various buildingblocks of the proposed closed-loop active sensingplatform. Simulation results showing the improvementsachieved by the proposed system, over a traditionalopen-loop system that schedules waveform in a round-robin fashion without diversity, are presented inSection V. Section VI concludes this work and presentsa brief overview of the future work.
II. LITERATURE REVIEW
In the design of the proposed system, we arefaced with multiple challenges in integration ofdetection, signal processing, tracking, and scheduling.Very few studies have investigated the design ofan urban surveillance system that addresses suchintegration from a systems engineering point-of-view.The literature is populated with studies that addressfew of the components in this work; nonetheless, acohesive, comprehensive framework, incorporating allthe features described in this study, is missing.
Studies that specifically address closed-loop targettracking are gaining renewed interest from theresearch community [1–3]. Sanders-Reed [4] examinedintegration issues of a multitarget tracking system usingvideo sensors and sensor-pointing commands to closethe feedback loop. A more recent work by O’Rourkeand Swindlehurst [5] demonstrated a closed feedbackloop approach for multitarget tracking with the use ofRF/EO sensors. Computational aspects of a closed-loopimage-based tracker of airborne targets were consideredby Robinson and Sasaki [6], and a closed-loop CCD-based target tracking mechanism for airborne targetswas developed by Deng et al. [7]. An overview ofsystems-level modeling for the performance evaluationof closed-loop tracking systems for naval applicationswas given by Beeton and Hall [8]; closed-loop targettracking for underwater systems is also beginning togain traction [9]. Even though all these studies employsome form of tracking, detection, or signal processing,none of them address adaptive waveform scheduling.
Next-generation multifunctional and waveform-agile radars demand innovative resource managementtechniques to achieve a common sensing goal whilesatisfying resource constraints. Resource allocationfor target tracking has been studied from differentperspectives. Adaptive sensing for single target trackingwas previously considered by He and Chong [10],where the sensor scheduling problem was formulatedas a partially observable Markov decision process
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 3
(POMDP). Multitarget results using the same solutionframework were presented by Li et al. [11]. Kershawand Evans [12] investigated the problem of one-step-ahead waveform scheduling for tracking systems, whilethe multi-step-ahead case was considered by Suvorovaet al. [13]. The problem of airborne tracking ofground targets was further studied by Miller et al.[14], where a POMDP framework was used in thecoordinated guidance of autonomous unmanned aerialvehicles (UAVs) for multitarget tracking. This workwas further expanded by Ragi and Chong [15, 16]and Ragi et al. [17] to accommodate autonomousamphibious vehicles (AAVs), track swap avoidance,target evasion, and threat-motion model for UAVs;the more general framework of decentralised POMDP(Dec-POMDP) was also studied in one of these researchworks. A method to incorporate information receivedfrom human intelligence assets into the UAV decisionmaking for target tracking was demonstrated bySarkale and Chong [18] using the POMDP framework.Allocation of other sensor resources such as targetrevisit interval and radar steering angle were examinedby Kirubarajan et al. [19].
A case study of urban operations for counter-terrorism, which was analyzed using a probability ofattack integrated into a multitarget tracking system,was proposed by Sathyan et al. [20]. Guerci andBaranoski [21] provided an overview of a knowledge-aided airborne adaptive radar system for trackingground targets in an urban environment. A lookaheadsensor scheduling approach was presented but, as theauthors acknowledged, they were “merely scratchingthe surface” of a possible solution. Research studiesfocusing on target tracking in the urban environmenthave been on the rise ever since. Multipath exploitationfor enhanced target tracking in urban terrain was studiedby Chakrabortay et al. [22]. In the following year,Chakrabortay et al. [23] studied target tracking inurban terrain in presence of high clutter. As opposedto the single target tracking cases considered in theprevious two works, an integrated method to exploitmultipath and mitigate high clutter simultaneously formultitarget tracking was done by Zhou et al. [24].A LIDAR-based approach to track targets at urbanintersections was demonstrated recently by Chen etal. [25], where simulation results are provided for realurban intersections. The results in the study suggeststhat substantial amount of work remains to be done inthis field. A data fusion framework for UAVs trackinga single target in an urban terrain was demonstratedby Ramirez-Paredes et al. [26]. Machine learningtechniques to track multiple targets in an urban setting
have been making a steady progress. Many new ideas inthis domain are currently being pursued [27].
As is amply justified by the previous studies,a holistic approach that manages all the crucialcomponents involved in target tracking (in urbanterrain) is the need of the hour. The only other work thatis close in spirit to our work in addressing this problemfrom a systems perspective is the study by Nielsen andGoodman [28], where they combine signal processing,detection, and waveform scheduling for tracking atarget. However, our approach significantly differs fromthe method in that research work. Specifically, weexpand upon our previous work [29] and analyze theperformance of the proposed closed-loop system undermore realistic urban conditions. Ground targets movewith enough speed to cause non-negligible Dopplershift; thus, a time-delay versus Doppler image is used toextract range and range-rate measurements. In addition,we analyze the effect of competition among motionmodels with the inclusion of an acceleration model inthe filter design. Waveforms are scheduled based onthe trace of the one-step-ahead error covariance matrix,which is proportional to the perimeter of the rectangularregion enclosing the covariance ellipsoid. This resultsin a better approximation of the mean square errorthan the previously considered matrix determinant. Wealso add up-sweep and down-sweep chirped waveformsof different pulse durations to the waveform libraryavailable for scheduling.
III. PROBLEM ASSUMPTIONS ANDMODELING
The first step in designing an active sensingplatform for target tracking in an urban environmentis to model the various elements that are part of thisenvironment. Even though this process is intrinsicallyimperfect owing to the many simplifying assumptionsexplained in this section, the models consideredfacilitate the analysis of the interplay among thesedifferent elements, and how they ultimately affect theoverall tracking system performance.
3.1. Clutter and Multipath in Urban Terrain
The overwhelming complexity of the urbanenvironment makes it virtually impossible to considerevery detail in every possible scenario. In this work,we consider a representative scenario that allows thetracker to experience the main technical challengesobserved in practice: multipath ambiguities, lack of
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

4 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
continuous target visibility, and measurement-to-trackuncertainty due to clutter.
Throughout this work, the term clutter is used todescribe the signal received as a result of scatteringfrom background objects other than targets of interest.Usually dense and unevenly distributed over thesurveillance area, urban clutter increases the falsealarm rate and missed detections when modeledinappropriately. As opposed to noise, clutter is causedby the transmitted signal; therefore, it is directly relatedto the signal reflected by targets. We consider clutter asa superposition of Nc independent scatterers,
nc(t) =Nc
∑i=1
ais(t− τi)e2π jνi ,
where the ith scatterer has reflectivity ai, τi is the time-delay from the transmitter to the ith scatterer and backto the receiver, νi is the Doppler shift incurred duringpropagation, and s(t) is the transmitted signal.
Target detection in urban terrain is affected bymultipath propagation because of the inability ofsensors to distinguish between the received signalscattered directly from a target and the receivedsignal that traversed an indirect path in the urbanscenario. However, multipath can be exploited toincrease radar coverage and visibility when a directpath between the sensor and target is not available[22]. Targets can also be detected due to reflectionsfrom buildings, vegetation, and other clutter scatterershaving different reflectivity coefficients, which presentsdifferent multipath conditions. A high clutter can inflictsevere loss on the SNR of the multipath returns[23]. Therefore, addressing high clutter and exploitingmultipath in an integrated fashion is crucial for urbantarget tracking.
Using prior knowledge of the terrain, a physicalscattering model can be derived. We assume reflectivesurfaces are smooth, reflectivity coefficients areconstant, and the angle of incidence equals the angleof reflection. We further assume that the strength of theradar return is negligible after three reflections.
For an unobstructed target, the direct path canbe described as follows. Let p and q be vectorscorresponding to the paths from transmitter to targetand from target to receiver, respectively. The length ofthe direct path is the sum of the lengths of p and q;azimuth is the angle between the receiver and q; and theDoppler shift is the sum of the projected target velocityonto p and q. In all other cases, path length, azimuth,and Doppler shift can be calculated once the reflectionpoint on the clutter scatterer has been determined.
For instance, let (xc,yc) be the incidence point of thetransmitted signal on the clutter scatterer, (xk,yk) thetarget position at time step k, and (xr,yr) the receiverlocation. Using simple geometry and the line equation,the reflection point (xc,yc) can be found solving theequations below:
yc = mxc + c
[−m(xr− xc)+ yr− yc]2
(xr− xc)2 +(yr− yc)2 =[−m(xk− xc)+ yk− yc]
2
(xk− xc)2 +(yk− yc)2 ,
where m is the slope and c is the y-intercept in theline equation representing the clutter scatterer. Bothm and c are assumed to be known. Note that such apoint may not exist due to possible obscuration and thefinite dimensions of scatterers. Equations above referto the transmitter-target-clutter-receiver path, and theapproach is analogous for other paths.
3.2. Signals for Active Sensing in Urban TerrainRadar has become an essential sensor in tracking
and surveillance systems in urban terrain owing toits ability to survey wide areas rapidly under anyweather conditions [30]. In this work, we considera sensing system where small low-power multistaticradars are distributed over the surveillance area. Inparticular, we consider bistatic radar pairs augmentedby additional sensors (transmitters or receivers). Thephysical separation between the transmitter and receiverin such a system provides the spatial diversity needed toimprove coverage. A bigger coverage area results in animproved detection.
Before we describe the transmitted and receivedsignals, it is important to understand the different timeframes involved. While the transmitter and receiverperform signal processing on a intrapulse time frame,the tracker works on a interpulse time frame. Therefore,in the proposed signal model, three time scales areused: the state sampling period T = tk− tk−1, the pulserepetition interval T1, and the receiver sampling periodT2. In general, T2 T1 T . In addition, we use thefar-field assumption and consider the signal wave to beplanar.
At time tk, a series of pulses is transmitted atperiods of T1 seconds. Assuming Gaussian-windowedup-sweep and down-sweep chirp signals of unit energy,the signal transmitted by the nth transmitter (n =1, . . . ,N) at time tk is given by:
sk,n(t)=(B−1)/2
∑b=−(B−1)/2
exp[± jγ−1/(2κ2)
](t−bT1)
2
(πκ2B2)1/4 ,
(1)
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 5
where t ∈ R, B is the number of pulses transmitted, κ
represents the pulse duration, and γ is the chirp rate. Thecomplex exponential is positive or negative accordingto the waveform scheduled for transmission: up-sweepchirp or down-sweep chirp, respectively.
The mth receiver (m= 1, . . . ,M) is a uniform lineararray of Lm sensor elements; the sensor elements Lmat each receiver are separated by distance dm, wherethe direction of arrival of the signal sent by the nthtransmitter is θn,m. We assume coherent processing, i.e.,radar returns that arrive at different receiver samplingintervals can be processed jointly. In other words, weare assuming that radar returns can be stored, aligned,and subsequently fed to the receiver for fusion.
The received signal is a summation of reflectionsfrom targets of interest and clutter scatterers. Let Pk,n,mbe the total number of reflections received by themth receiver at time tk that originated from the nthtransmitter. Signals from the pth path (p = 1, . . . ,Pk,n,m)are subject to a random phase shift φ
pn,m that are
uniformly distributed in (−π,π]. Hence, the signalreceived by the lth element (l = 1, . . . ,Lm) of the mthsensor array at time tk +uT2 can be written as:
yk,m,l(u) =N
∑n=1
Pk,n,m
∑p=1
e jφ pn,mgp
n,m (xk;uT2)+ e(u), (2)
where u = (0, . . . ,U − 1) is the sample index, and e(u)is a complex white Gaussian process. We can writegp
n,m (xk;uT2) as:
gpn,m (xk;uT2) = (3)
αpn,m (xk) · sk,n
(uT2− τ
pn,m (xk)
)·
e2π jν pn,m(xk)uT2− j(lm−1)dm[cos(θ p
n,m(xk))] ·e−2π jν p
n,m(xk)uT2+ j(lm−1)dm[sin(θ pn,m(xk))θ
pn,m(xk)uT2],
where dm = dm/λ for the carrier signal wavelengthλ , and sk,n
(uT2− τ
pn,m (xk)
)is the delayed replica
of the transmitted signal given in (1). In addition,the following received signal parameters are definedfor the pth path between the nth transmitter andmth receiver: α
pn,m (xk) is the magnitude of the radar
return, including transmitted signal strength and pathattenuation; τ
pn,m (xk) is the time-delay incurred during
propagation; νpn,m (xk) represents the Doppler shift; and
θpn,m (xk) is the direction of arrival, where θ
pn,m (xk) is its
rate of change. The parameters above can be computedfor each target state xk, given prior knowledge of theurban scenario.
3.3. Models for Target Motion in Urban Terrain
Target motion in urban terrain can be describedby a large number of models that can be combined invarious ways. It is not the objective of this work todesign novel motion models for targets in urban terrain.Instead, we adopt existing models in the literature. Fora comprehensive survey emphasizing the underlyingideas and assumptions of such models, we refer thereader to Li and Jilkov [31].
Let the target state vector at time tk be
xk = [xk, xk,yk, yk, xk, yk]> ,
where > denotes matrix transpose, [xk, yk]> is the
velocity vector, and [xk, yk]> is the acceleration vector.
Motion models can be divided into two categories:uniform motion (or non-maneuvering) models andmaneuvering models. The most commonly used non-maneuvering motion model is the nearly constantvelocity (NCV) model, which can be written as:
xk+1 = Fxk +Gwk, (4)
where the process noise wk is a zero-mean white-noisesequence,
F=
1 T 0 0 0 00 1 0 0 0 00 0 1 T 0 00 0 0 1 0 00 0 0 0 0 00 0 0 0 0 0
, G=
12 T 2 0T 00 1
2 T 2
0 T0 00 0
,
and T is the state sampling period. The processnoise covariance multiplied by the gain is the designparameter
Q = diag[σ
2wxQ′,σ2
wyQ′],
where Q′ = GG>, and σ2wx and σ2
wy are uncorrelatedvariances in x and y directions, respectively, corre-sponding to noisy “accelerations” that account formodeling errors. To achieve nearly constant velocity oruniform motion, changes in velocity over the samplinginterval need to be small compared to the actualvelocity, i.e., σ2
wxT xk and σ2wyT yk.
We consider two different models to describeaccelerations and turns. Left and right turns are modeledby the coordinated turn (CT) model with known turnrate ω . This model assumes that the targets move withnearly constant velocity and nearly constant angularturn rate. Although ground target turns are not exactly
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

6 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
coordinated turns, the CT model, originally designedfor airborne targets, is a reasonable and sufficientapproximation for our purposes. Knowledge of eachturn rate is based on the prior information about theurban scenario. For the six-dimensional state vector,the CT model follows (4), where wk is a zero-meanadditive white Gaussian noise (AWGN) that modelssmall trajectory perturbations, and
F =
1 sinωT
ω0 − 1−cosωT
ω0 0
0 cosωT 0 −sinωT 0 00 1−cosωT
ω1 sinωT
ω0 0
0 sinωT 0 cosωT 0 00 0 0 0 0 00 0 0 0 0 0
.
As in the NCV model, Q = σ2wdiag [Q′,Q′], Q′ = GG>,
and σ2w is the process noise variance. However, contrary
to the NCV model, x and y directions are now coupled.Accelerations and decelerations are described by
the Wiener-sequence acceleration model, where
F =
1 T 0 0 1
2 T 2 00 1 0 0 T 00 0 1 T 0 1
2 T 2
0 0 0 1 0 T0 0 0 0 1 00 0 0 0 0 1
and
G =
12 T 2 0T 00 1
2 T 2
0 T1 00 1
.
For this model, the process noise wk in (4) is a zero-mean white-noise sequence with uncorrelated variancesin the x and y directions. We consider σ2
wxT xk
and σ2wyT yk; under these assumptions, the Wiener-
sequence acceleration model is also known as the nearlyconstant acceleration (NCA) model.
IV. CLOSED-LOOP ACTIVE SENSINGPLATFORM
In this section, we outline the main aspects of eachcomponent of our closed-loop active sensing platformdepicted in Fig. 1.
4.1. From Signal Detection to DiscreteMeasurements
Under the modeling assumption of AWGN, theoptimal signal detection is the correlator receiver,or equivalently, the matched-filter [32]. The signalreceived by the lth element of the mth sensor array,given in (2), is compared to a template signal bycomputing a correlation sum of sampled signals.The template signal is a time-shifted, time-reversed,conjugate, and scaled replica of the signal transmittedby the nth transmitter at time tk:
hk,n(t) = as∗k,n (td− t) , (5)
where td is the time-delay incurred during propagation,∗ represents complex conjugate, and a is the scalingfactor assumed to be unity.
In the general multistatic setting with N transmit-ters and M receivers, we consider the case where themth receiver is a uniform linear array of Lm sensorelements. Therefore, we need to combine the signalsreceived by each of the sensor array elements to obtainthe total signal received by the mth receiver at time tk,which can be written as:
yk,m =U−1
∑u=0
T1
∑t=1
Lm
∑l=1
yk,m,l(u)hk,n (uT2− t) , (6)
where yk,m,l is given by (2), and hk,n is given by (5).Before range and range-rate measurements that
feed the tracker can be extracted, pre-processing theradar intensity image is necessary. Assuming eachtarget is a point object (as opposed to an extendedobject with spatial shape), we use peak detection tolocate a point source corresponding to a received powerpeak on a time-delay versus Doppler image. Becauseof the strong local (but lack of global) similaritiesexhibited by urban clutter, image processing techniquesaimed to suppress this type of clutter should be basedon segmentation analysis, where each image segmentmust be processed individually in order to distinguishbetween targets of interest and background scatterers[33]. However, this could be extremely computationallyintensive; therefore, we use a more standard formof clutter suppression. Specifically, we calculate abackground model prior to tracking using the averageof radar intensity images over time to approximate thetrue urban scenario. The average background image isthen subtracted from each image formed using radarreturns during the tracking process. For each time-delayτ and Doppler shift ν , the average magnitude of the
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 7
radar return is given by:
A(τ,ν) =1J
J
∑j=1
A j(τ,ν),
where j indexes times during which the urban scenariowas under surveillance prior to tracking, and
Ak(τ,ν) = A−k (τ,ν)− A(τ,ν)
is the magnitude of the radar return for time-delay τ
and Doppler shift ν at time step tk during tracking.Note that it is also possible to reduce the image noise,using several image processing techniques, if furtherimprovements on the contrast between background andtargets of interest are needed.
Peak detection is implemented iteratively. For eachpeak
(τ
peakk ,ν peak
k
)found in Ak(τ,ν), a nonlinear
optimization algorithm is used to find a curve thatfits the underlying image within a window centeredat the peak. When performing curve fitting, weare interested in estimating the measurement errorcovariance matrix. Since noise sources are assumedto be AWGN, Gaussian curve fitting has been widelyused in target detection [34]. Note that a Gaussiancan be approximated by a quadratic locally within awindow centered at the peak. In this work, we fit atwo-dimensional quadratic function to each peak in theunderlying image. Specifically, at every time step tk, wesolve the following optimization problem:
minστ ,σν
∑τ
∑ν
∣∣ fστ ,σν(τ,ν)−Ak(τ,ν)
∣∣2,where for ε > 0, the window containingtime-delay and Doppler values is definedby τ ∈
(τ
peakk − ε,τ peak
k + ε
)and
ν ∈(
νpeakk − ε,ν peak
k + ε
), and
fστ ,σν(τ,ν) = σ
2τ τ
2 +2στ σν τν +σ2ν ν
2.
We define a scan as the set of measurementsgenerated by a radar receiver from an individual lookover the entire surveillance area. The kth scan by themth receiver corresponding to its kth look is denotedby:
Zk,m =
z1k,m,z
2k,m, . . . ,z
Nk,mk,m
,
where Nk,m is the total number of measurements inscan Zk,m. In this work, the jth
(j = 1, . . . ,Nk,m
)measurement in the kth scan of the mth receiver is the
following two-dimensional vector of range and range-rate:
z jk,m =
[r j
k,m
r jk,m
],
where(
r jk,m, r
jk,m
)corresponds to the location of the
jth peak in the time-delay and Doppler image fromreceiver m by trivial transformation. Associated witheach measurement vector z j
k,m is an error covariancematrix
R jk,m(ψ) =
σ2r jk,m
ρrr
(σr j
k,mσr j
k,m
)ρrr
(σr j
k,mσr j
k,m
)σ2
r jk,m
,where ψ is the vector of parameters that characterizethe waveform transmitted at tk, and ρrr is the correlationcoefficient between range and range-rate measurementerrors. The vector ψ is included in the measurementnoise covariance matrix description to show the explicitdependence of this matrix on the transmitted waveform.In particular, transmitted waveforms defined by (1) arecharacterized by pulse duration κ and chirp rate γ;hence, in this case,
ψ =
[κ
γ
].
The correlation coefficient between measurement errorsρrr also depends on the transmitted waveform andcan be calculated using the waveform’s ambiguityfunction [35]. In particular, the correlation coefficientfor the up-sweep and down-sweep chirp waveforms,considered in this work, are strongly negative andpositive, respectively.
In state estimation, the measurement modeldescribing the relationship between the target state attime tk and the kth radar scan can be written as:
z jk,m = H(xk)+vk,
where H is a vector-valued function that maps thetarget state xk to its range and range-rate, and vk isthe zero-mean Gaussian measurement noise vector withcovariance matrix R j
k,m(ψ).
4.2. Multitarget-Multisensor Tracker
We consider a tracker implemented as a sequentialfilter that weighs measurements in each scan. In addi-tion, tracks are initiated, maintained, and terminatedin an integrated fashion. Note that we use the word
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

8 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
track instead of target because we have no a prioriknowledge of the number of targets in the urbanscenario. Also, algorithms discussed in this sectionhave been previously presented in the literature. Hence,rather than deriving each algorithm below, we highlighttheir main features related to the design of a closed-loopactive sensing system for urban terrain.
4.2.1. Automatic Track Initiation and Termination
The goal in track initiation is to estimate tentativetracks from raw measurements without any priorinformation about how many targets are present in thesurveillance area.
We follow the two-point differencing algorithm,according to which it takes two time steps (or tworadar scans) for a track to be initiated [36]. For eachreceiver m (m = 1, . . . ,M), a tentative track is initiatedfor every declared detection, i.e., for every peak in thetime-delay versus Doppler image exceeding a givendetection threshold and that cannot be associated withan existing track. In particular, at t1 a tentative track x( j)
1is initiated for each measurement j = 1, . . . ,N1,m in scanZ1,m. Assuming the velocity of a target along the x andy coordinates lies within the intervals
[−xmax
k−1, xmaxk−1
]and[
−ymaxk−1, y
maxk−1
], respectively, a track is initiated at (xk,yk)
when
xk ∈[(−xmax
k−1−2σxk−1
)T,(xmax
k−1 +2σxk−1
)T]
and
yk ∈[(−ymax
k−1−2σyk−1
)T,(ymax
k−1 +2σyk−1
)T],
where T = tk − tk−1 is the state sampling period, andσxk−1 and σyk−1 are the standard deviations of targetvelocities in x and y directions, respectively. Eachmeasurement that falls into the track initiation areayields an initial position and velocity from which atrack is initiated. Measurements can then be associatedwith this new track starting at tk > 2, and the target’sacceleration can then be estimated at the filtering stageof the tracker, described in Section 4.2.3.
The usual approach to track termination is todeclare a track terminated if such a track has notbeen associated with any new measurements for twoconsecutive time steps. We adopt a more integratedapproach and use a probability of track existence,defined in Section 4.2.4, that is initialized for everyinitiated track. Specifically, a track is terminated if theprobability of track existence falls below a given tracktermination threshold.
4.2.2. Measurement Validation
For each initiated track x(t)k , t = 1, . . . ,Tk, wedefine a gate in the measurement space within whichmeasurements to be associated with track x(t)k areexpected to lie. Only those measurements that lie withinthe gate are said to be validated; therefore, only suchmeasurements are associated to track x(t)k . The size andshape of the gate can be defined in several differentways. We use the ellipsoidal validation gating [37] andapply the following statistical test:[
zik− z(t)k
]>(S(t)
k
)−1 [zi
k− z(t)k
]< g2,
where zik represents the ith measurement in the kth scan,
z(t)k is the predicted measurement for track x(t)k , S(t)k
represents the innovation covariance at scan k, and gis a threshold computed from Chi-square distributiontables, such that, if a target is detected, its measurementis validated with gating probability PG. The number ofdegrees of freedom of g is equal to the dimension of themeasurement vector. In the two-dimensional case, thearea of the validation ellipse is g2π det(S(t)
k )1/2, wheredet is the matrix determinant.
4.2.3. Filtering
The tracking algorithm needs to be adaptive inorder to handle a time-varying number of targets anddynamic urban conditions. We show in Section V thatthe variable structure interacting multiple model (VS-IMM) estimator is effective under such conditions [38,39]. The VS-IMM estimator implements a separatefilter for each model in its model set, which isdetermined adaptively according to the underlyingterrain conditions. Specifically, at each time step tk, themodel set is updated to:
Mk =
rk ∈M total ∣∣I ,x(t,r)k−1,P(t,r)k−1,rk−1 ∈Mk−1
,
where x(t,r)k−1 and P(t,r)k−1 are the mean and covariance of
track t in the filter matched to model r at tk−1, Irepresents prior information about the urban scenario,and M total is the set of all possible motion models.Changes in track trajectory are modeled as a Markovchain with transition probabilities given by:
πi j = Prk = i|rk−1 = j , i, j ∈M total .
In this work, we consider the unscented Kalmanfilter (UKF) algorithm. Initially proposed by Julier andUhlmann [40], the UKF represents the state distribution
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 9
by a set of deterministically chosen sample points. EachUKF filter, matched to a different motion model, runsin parallel in the VS-IMM framework. The estimatedmean and covariance from each model-matched filterare mixed (Gaussian mixture) before the next filteringtime step. The overall output of the VS-IMM estimatoris then calculated by probabilistically combining theindividual estimates of each filter [41].
4.2.4. Data Association
We consider the linear multitarget integratedprobabilistic data association (LMIPDA) algorithm fordata association [42, 43]. An extension of the single-target integrated probabilistic data association [44],LMIPDA models the notion of track existence as aMarkov chain. Let χk denote the event that a track existsat tk. The a priori probability that a track exists at tk isgiven by:
ψk|k−1 , P
χk
∣∣∣∣ k−1⋃i=1
Zi
,
where Zk is the set of measurements from all receiversat time tk, i.e., Zk = ∪M
m=1Zk,m. The evolution of trackexistence over time satisfies the following equations:
ψk|k−1 = p11ψk−1|k−1 + p21(1−ψk−1|k−1
)1−ψk|k−1 = p12ψk−1|k−1 + p22
(1−ψk−1|k−1
),
where pi j, i, j = 1,2, are the corresponding transitionprobabilities.
The central ideal behind the LMIPDA algorithm isthe conversion of a single-target tracker in clutter intoa multitarget tracker in clutter by simply modifying theclutter measurement density according to the predictedmeasurement density of other tracks. The modifiedclutter density of track x(t)k given the ith measurementcan be written as:
Ω(t)i = ρ
(t)i +
Tk
∑s=1,s6=t
p(s)iP(s)
i
1−P(s)i
,
where ρ(t)i is the clutter density in the validation gate
of track x(t)k given the ith measurement in the kth scan
zik, P(t)
i is the a priori probability that zik is the true
measurement for track x(t)k , i.e.,
P(t)i = PDPGψ
(t)k|k−1
p(t)i /ρ(t)i
∑N(t)
ki=1 p(t)i /ρ
(t)i
,
where ψ(t)k|k−1 is the probability of existence of track x(t)k ,
p(t)i is the a priori measurement likelihood (Gaussiandensity), and N(t)
k is the total number of measurements
associated with track x(t)k at time tk. The probability oftrack existence is calculated as follows:
ψ(t)k|k =
(1−δ
(t)k
)ψ
(t)k|k−1
1−δ(t)k ψ
(t)k|k−1
,
where
δ(t)k = PDPG
1−N(t)
k
∑i=1
p(t)i
Ω(t)i
.
For each model r ∈Mk, we define the followingprobabilities of data association:
β(t,r)k,0 =
1−PDPG
1−δ(t,r)k
for clutter measurements, and for each target measure-ment i > 0,
β(t,r)k,i =
1−PDPG p(t,r)i(1−δ
(t,r)k
)Ω
(t)i
,
where p(t,r)i is the a priori likelihood of measurement iassuming association with track x(t)k that follows motionmodel r, i.e.,
p(t)i = ∑r∈Mk
p(t,r)i ,
and
δ(t,r)k = PDPG
1−N(t)
k
∑i=1
p(t,r)i
Ω(t)i
.
Finally, the motion model for each track x(t)k isupdated according to the following model probabilities:
µ(t,r)k = µ
(t,r)k|k−1
1−δ(t,r)k
1−δ(t)k
,
for r ∈Mk.
4.3. Waveform Scheduling
Many modern airborne radars have a waveformscheduler implemented. Ideally, the scheduler woulduse a library of waveforms especially designed toimprove detection and the overall tracking performance.
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

10 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
We consider the general waveform selectionproblem, which in the multitarget tracking case can bewritten as:
minψ∈Ψ
1Tk
Tk
∑t=1
E‖x(t)k − x(t)k ‖
2 ∣∣ Zk
,
where Ψ represents the waveform library, xk is thetracking state estimate, and Tk is the total number oftracks at tk.
In particular, we consider the one-step ahead(or myopic) waveform scheduling problem, where thewaveform selected for transmission at tk+1 is given by:
ψk+1 = argminψk+1∈Ψ
1Tk
Tk
∑t=1
Tr
P(t)k+1 (ψk+1)
, (7)
where Tr is the matrix trace and P(t)k+1 is the posterior
state error covariance matrix corresponding to trackx(t)k . For a detailed discussion on the advantages ofincorporating lookahead in sensing, see Miller et al.[14]. The performance measure in (7) is equivalentto minimizing the mean square tracking error overall existing tracks. The posterior state covarianceerror matrix P(t)
k+1 defines a six-dimensional ellipsoid
centered at x(t)k that is a contour of constant probabilityof error [45], and its trace is proportional to theperimeter of the rectangular region enclosing thisellipsoid.
In order to evaluate (7), we first approximatethe measurement error covariance matrix by theFisher information matrix J(ψ) corresponding to themeasurement using waveform ψ [12, 45]. Specifically,
R(ψ) = UJ(ψ)−1U>,
where U is the transformation matrix between the time-delay and Doppler measured by the receiver and thetarget’s range and range-rate. In particular, for the up-sweep Gaussian chirp with pulse duration κ , chirp rateγ , and wavelength λ defined by (1), we have:
R(ψ) =1η
[c2κ2
2 − 2πc2γκ2
λ
− 2πc2γκ2
λ
( 2πcλ
)2(
12κ2 +2γ2κ2
) ] ,where η is the signal-to-noise ratio (SNR). A similarexpression can be obtained for the down-sweepGaussian chirp.
The posterior state error covariance matrix canthen be calculated for each waveform ψ ∈ Ψ using theUKF’s covariance update equations.
Coherent signal processing across spatially dis-tributed transmitters and receivers is an appealingfeature of our sensing platform. The transmissionof phase synchronization information for coherentsignal processing and waveform scheduling is nowpossible owing to the advancements in the wirelesscommunications technology, which might have notbeen possible just a decade before.
V. SIMULATION RESULTS
Monte Carlo simulations are used to evaluate theeffectiveness of the proposed closed-loop system inurban terrain.
A number of terrain factors have major impact onthe overall system performance. Different road classes(e.g., highways, arterial roads, residential streets, andalleys) impose different constraints on ground vehicles.In addition, different construction materials (e.g., glass,concrete, brick, and wood) have different reflectivitycoefficients; therefore, they have different multipathconditions. Any urban environment encompassesmultiple components like bridges, footbridges, fencesof various types, and round poles etc. Moreover,the structural design of the buildings can vary. Themodeling assumptions and the models described inSection III and Section IV might not be able toincorporate every fine detail in an urban environment;nevertheless, they are general enough to accommodateany generic representative urban scenario with adequatedetail. For the simulation purposes, we consider ascenario that is representative of the urban conditionsto be likely faced by an active sensing tracking system.E.g., we will use vegetation in the simulations torepresent the clutter in the urban scenario.
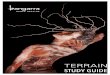
The simulated scenario is depicted in Fig. 2, whichshows four building structures at an intersection. Theuneven nature of urban clutter is represented by the‘+’, indicating vegetation on the center median andsidewalks. The overall clutter density is assumed to be2.5e−4m2. A radar transmitter, represented by ‘5’, islocated at (2085,1470.5); whereas two radar receivers,each with three sensor array elements, are located at(2088,1475) and (2078,1467), both represented by ‘©’.The maximum sensor range is 300 meters, and the SNRexperienced is 0.2.
Although in reality the transmitted signal can bereflected by multiple scatterers, we assume that thestrength of the radar return is negligible after threereflections; therefore, we restrict our simulation tothe following paths: transmitter-target-receiver (direct
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 11
path), transmitter-clutter-receiver, transmitter-target-clutter-receiver, transmitter-clutter-target-receiver,transmitter-clutter-clutter-receiver, transmitter-clutter-target-clutter-receiver, transmitter-target-clutter-clutter-receiver, and transmitter-clutter-clutter-target-receiver.
1900195020002050210021502200
1300
1350
1400
1450
1500
1550
1600
1650
1700
1750
Simulation Scenario
x[m]
y[m
]
Fig. 2. The simulated urban terrain. The start and end trajectory pointsare shown as 2; receivers are shown as ©; the transmitter isshown as5; and clutter discretes are shown as +.
The simulation experiment consisted of 100 runs,each with a total of 140 radar scans, where a radar scantakes 0.25 seconds. Two targets, 10 seconds apart fromeach other, are simulated using the same trajectory asfollows. Starting at (1950,1500), each target moves atconstant velocity of 10 m/s in the x direction for 10seconds; as they approach the intersection, they startdecelerating at constant rate of 1 m/s2 for 5 seconds;they enter a left turn with constant turn rate of π/20rad/s for 10 seconds; after completing the turn, eachtarget accelerates for 5 seconds at 1 m/s2 rate; finally,they end their trajectories with constant velocity at(2068.8,1667.8).
Two model sets are used during the motionmodel adaptation. In the vicinity of intersections, a setconsisting of NCA, left-turn CT, and right-turn CT isused. Both the left and right turn CT model are assumedto have a turn rate of π/20 rad/s. This model set isused between scans 20 and 100. During the remainingradar scans, a set containing the NCA and NCV motionmodels is used instead. The motion model transitionprobability matrix is given by 0.99 0.01 0 0
0.1 0.7 0.1 0.10 0.1 0.99 00 0.1 0 0.99
.
A waveform library consisting of four differentGaussian-windowed chirp signals is considered. Wave-forms vary in pulse duration κ . In particular, radarsensors considered in the simulation experiment areassumed to support the following pulse durations: κ =0.5 µs, and κ = 1.375 µs. In general, longer pulsesreturn more power; however, finer details may be lost.In addition, waveforms of each pulse duration canbe either an up-sweep or down-sweep chirp. Pulsesare repeated at every 10 milliseconds, and waveformsoperate at 4 GHz with 40 MHz of bandwidth.
A more traditional open-loop system, whichdoes not support any diversity modes and thatschedules the waveforms in a round-robin fashion, isused as a baseline for comparison. In the baselineimplementation, a single UKF using the NCV motionmodel is considered.
Note that the simulation parameters used in thiswork do not represent any particular system, and werechosen exclusively for illustration purposes.
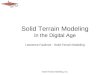
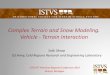
Simulation results in Fig. 3 and Fig. 4 show that theclosed-loop system clearly outperforms its open-loopcounterpart. The average number of confirmed tracks isincreased by approximately 15% over 140 radar scans,and the position RMSE is reduced by approximately60%. Fig. 5 shows the evolution of each motion modelprobability over time. Although there is some “modelcompetition” between NCV and NCA, the closed-loopsystem satisfactorily identifies the correct motion modelthroughout the simulation.
One would like to ascertain the improvementshown by the closed-loop sensing platform over theopen-loop system in terms of a particular mode ofdiversity incorporated in the closed-loop system. Evenif this could be sometimes possible by performingmultiple simulations under different representativescenarios, in real-world urban environment, assessingthe contribution of every single component in thesystem is impractical. Instead of analysing thecontribution of each diversity model separately, weargue that the improvement shown by our system isan emergent feature of the proposed sensing platform,and assessing and fine-tuning the characteristic ofeach diversity model individually is not required.A theoretical investigation on this is being activelypursued, and we are preparing a separate study toaddress the same.
VI. Concluding Remarks
The closed-loop active sensing system proposed inthis work highlights the major challenges in the design
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

12 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
0 20 40 60 80 100 120 140140
150
160
170
180
190
200
Radar Scans
Num
ber
of C
onfir
med
Tra
cks
Closed−LoopOpen−Loop
Fig. 3. Number of confirmed tracks for close-loop and open-loopsystems.
0 20 40 60 80 100 120 1400
5
10
15
Radar Scans
Pos
ition
RM
SE
[m]
Closed−LoopOpen−Loop
Fig. 4. Position RMSE for closed-loop and open-loop systems.
0 20 40 60 80 100 120 1400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Radar Scans
Mot
ion
Mod
el P
roba
bilit
y
NCVNCALeft CTRight CT
Fig. 5. Motion model probabilities in the closed-loop system.
of multisensor-multitarget tracking systems, whilesignificantly outperforming its open-loop counterpart.New capabilities for tracking and surveillance, andthe seamless integration of different sensing platformswill only be possible with advances in the areas ofmultisensor data fusion, intelligent algorithms for signalprocessing and resource allocation, and creative ways tounravel multipath propagation. This work is a first steptowards understanding how these research areas interactfrom a systems engineering perspective to ultimately beintegrated into a active sensing tracking platform thatoperates effectively in urban terrain.
Future work includes tracking dismounts, andthe investigation of coordinated non-myopic waveformscheduling schemes for distributed transmitters, whichdo not have to simultaneously transmit the samewaveform. We also consider the expansion of thesimulated waveform library, and the formulation ofthe scheduling problem as a POMDP. Mobile sensingplatforms, such as UAVs and vehicular sensor networks,are especially important in hostile urban environmentsbecause their completely distributed and opportunisticnature makes it difficult for hostiles to disablesurveillance, while potentially increasing the coveragearea. Lastly, the performance of the proposed sensingsystem with the above enhancements will be evaluatedthrough simulations on a real-world urban intersection.
REFERENCES
1. T. Oliveira, A. P. Aguiar, and P. Encarnao,“Moving Path Following for Unmanned AerialVehicles With Applications to Single and MultipleTarget Tracking Problems,” IEEE Trans. Robot.,vol. 32, no. 5, pp. 1062–1078, Oct 2016.
2. J. Yan, H. Liu, B. Jiu, B. Chen, Z. Liu, and Z. Bao,“Simultaneous Multibeam Resource AllocationScheme for Multiple Target Tracking,” IEEETrans. Signal Process., vol. 63, no. 12, pp. 3110–3122, Jun 2015.
3. J. Yan, H. Liu, W. Pu, S. Zhou, Z. Liu,and Z. Bao, “Joint Beam Selection and PowerAllocation for Multiple Target Tracking in NettedColocated MIMO Radar System,” IEEE Trans.Signal Process., vol. 64, no. 24, pp. 6417–6427,Dec 2016.
4. J. N. Sanders-Reed, “Multitarget multisensorclosed-loop tracking,” in Proc. SPIE Acquis.,Track., and Pointing XVIII, vol. 5430. Int.Soc. for Opt. and Photonics, 2004, pp. 94–113. [Online]. Available: https://doi.org/10.1117/12.542932
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

P. R. Barbosa et al.: Controlled Tracking in Urban Terrain: Closing the Loop 13
5. S. M. O’Rourke and A. L. Swindlehurst, “Closed-loop tracking using multimodal RF/EO sensors,”in 2010 Conf. Rec. 44th Asilomar Conf. Signals,Syst. and Comput., Nov 2010, pp. 1662–1666.
6. B. Robinson and D. M. Sasaki, “Softwaresystems testing of a closed loop trackingsystem using a SIMULINK-based simulation,”in Proc. SPIE Acquis., Track., and PointingXIV, vol. 4025. Int. Soc. for Opt. andPhotonics, 2000, pp. 160–170. [Online].Available: https://doi.org/10.1117/12.391660
7. C. Deng, Y. Mao, W. Ren, and G. Ren,“Feedforward control based on orthogonal leastsquare for a charge-coupled device-based trackingloop,” in 2017 Chin. Autom. Congr. (CAC). IEEE,Oct 2017, pp. 6877–6881.
8. L. J. Beeton and S. L. Hall, “Closed loop trackingsystems for naval applications,” in The IEE Semin.Target Track.: Algorithms and Appl. (Ref. No.2006/11359), Mar 2006, pp. 115–122.
9. K. Shojaei and M. Dolatshahi, “Line-of-sight target tracking control of underactuatedautonomous underwater vehicles,” Ocean Eng.,vol. 133, pp. 244 – 252, 2017. [Online].Available: http://www.sciencedirect.com/science/article/pii/S0029801817300653
10. Y. He and E. K. P. Chong, “Sensor schedulingfor target tracking: A Monte Carlo samplingapproach,” Digit. Signal Process., vol. 16, no. 5,pp. 533 – 545, 2006, Special Issue on DASP 2005.[Online]. Available: http://www.sciencedirect.com/science/article/pii/S1051200405000345
11. Y. Li, L. Krakow, E. K. P. Chong, andK. Groom, “Approximate stochastic dynamicprogramming for sensor scheduling to trackmultiple targets,” Digit. Signal Process., vol. 19,no. 6, pp. 978 – 989, 2009, DASP’06- Def. Appl. of Signal Process. [Online].Available: http://www.sciencedirect.com/science/article/pii/S1051200407000905
12. D. J. Kershaw and R. J. Evans, “Optimalwaveform selection for tracking systems,” IEEETrans. on Inf. Theory, vol. 40, no. 5, pp. 1536–1550, Sep 1994.
13. S. Suvorova, D. Musicki, B. Moran, S. Howard,and B. L. Scala, “Multi step ahead beam and wave-form scheduling for tracking of manoeuveringtargets in clutter,” in Proc. IEEE Int. Conf. Acoust.,Speech, and Signal Process., 2005. (ICASSP ’05).,vol. 5, Mar 2005, pp. 889–892.
14. S. A. Miller, Z. A. Harris, and E. K. P.Chong, “A POMDP Framework for Coordinated
Guidance of Autonomous UAVs for MultitargetTracking,” EURASIP J. Adv. Signal Process.,vol. 2009, no. 1, Jan 2009. [Online]. Available:https://doi.org/10.1155/2009/724597
15. S. Ragi and E. K. P. Chong, “UAV Path Planning ina Dynamic Environment via Partially ObservableMarkov Decision Process,” IEEE Trans. Aerosp.and Electron. Syst., vol. 49, no. 4, pp. 2397–2412,Oct 2013.
16. S. Ragi and E. K. P. Chong, “DecentralizedGuidance Control of UAVs with ExplicitOptimization of Communication,” J. Intell.Robot. Syst., vol. 73, no. 1-4, pp. 811–822, Jan 2014. [Online]. Available: http://dx.doi.org/10.1007/s10846-013-9904-9
17. S. Ragi, C. Tan, and E. K. P. Chong, “Guidance ofautonomous amphibious vehicles for flood rescuesupport,” Math. Probl. Eng., vol. 2013, 2013.
18. Y. Sarkale and E. K. P. Chong,“Orchestrated management of heterogeneoussensors incorporating feedback from intelligenceassets,” in Proc. SPIE Signal Process., Sens./Inf.Fusion, and Target Recognit. XXIV, vol.9474. Int. Soc. for Opt. and Photonics,2015, p. 94740A. [Online]. Available: https://doi.org/10.1117/12.2176434
19. T. Kirubarajan, Y. Bar-Shalom, W. D. Blair, andG. A. Watson, “IMMPDA solution to benchmarkfor radar resource allocation and tracking in thepresence of ECM,” in 1997 Eur. Control Conf.(ECC), July 1997, pp. 2967–2972.
20. T. Sathyan, K. Bharadwaj, A. Sinha, andT. Kirubarajan, “Intelligence-aided multitargettracking for urban operations - a case study:counter terrorism,” in Proc. SPIE Sens.,and Command, Control, Commun., and Intell.(C3I) Technol. Homel. Secur. and Homel.Def. V, vol. 6201. Int. Soc. for Opt. andPhotonics, 2006, p. 62010M. [Online]. Available:https://doi.org/10.1117/12.669409
21. J. R. Guerci and E. J. Baranoski, “Knowledge-aided adaptive radar at DARPA: an overview,”IEEE Signal Process. Mag., vol. 23, no. 1, pp. 41–50, Jan 2006.
22. B. Chakraborty, Y. Li, J. J. Zhang, T. Trueblood,A. Papandreou-Suppappola, and D. Morrell,“Multipath exploitation with adaptive waveformdesign for tracking in urban terrain,” in 2010 IEEEInt. Conf. Acoust., Speech and Signal Process.,Mar 2010, pp. 3894–3897.
23. B. Chakraborty, J. J. Zhang, A. Papandreou-Suppappola, and D. Morrell, “Urban terrain
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls

14 Asian Journal of Control, Vol. 00, No. 0, pp. 1–14, Month 2018
tracking in high clutter with waveform-agility,” in2011 IEEE Int. Conf. Acoust., Speech and SignalProcess. (ICASSP), May 2011, pp. 3640–3643.
24. M. Zhou, J. J. Zhang, and A. Papandreou-Suppappola, “Multiple Target Tracking in UrbanEnvironments,” IEEE Trans. Signal Process.,vol. 64, no. 5, pp. 1270–1279, Mar 2016.
25. J.-F. Chen, C.-C. Wang, and C.-F. Chou, “Multipletarget tracking in occlusion area with interactingobject models in urban environments,” Robot. andAuton. Syst., vol. 103, pp. 68 – 82, 2018. [Online].Available: http://www.sciencedirect.com/science/article/pii/S0921889017301288
26. J. P. Ramirez-Paredes, E. A. Doucette, J. W.Curtis, and N. R. Gans, “Urban target searchand tracking using a UAV and unattended groundsensors,” in 2015 Am. Control Conf. (ACC), Jul2015, pp. 2401–2407.
27. P. Emami, P. M. Pardalos, L. Elefteriadou,and S. Ranka, “Machine Learning Methods forSolving Assignment Problems in Multi-TargetTracking,” arXiv preprint: 1802.06897, 2018,submitted to ACM Compute. Surv.
28. P. Nielsen and N. A. Goodman, “Integrateddetection and tracking via closed-loop radar withspatial-domain matched illumination,” in 2008 Int.Conf. Radar, Sep 2008, pp. 546–551.
29. P. R. Barbosa, E. K. P. Chong, S. Suvorova, andB. Moran, “Multitarget-multisensor tracking inan urban environment: A closed-loop approach,”in Proc. SPIE Signal and Data Process. SmallTargets, vol. 6969. Int. Soc. for Opt. andPhotonics, 2008, p. 69690W. [Online]. Available:https://doi.org/10.1117/12.777147
30. P. Chavali and A. Nehorai, Compressive Sensingfor Urban Radar. CRC Press, 2017, ch. 10, p.327.
31. X. R. Li and V. P. Jilkov, “Survey of maneuveringtarget tracking. Part i. Dynamic models,” IEEETrans. Aerosp. and Electron. Syst., vol. 39, no. 4,pp. 1333–1364, Oct 2003.
32. J. Proakis and M. Salehi, Digital Communications,5th ed. McGraw Hill, 2008.
33. T. Asano, D. Z. Chen, N. Katoh, andT. Tokuyama, “Polynomial-time Solutions toImage Segmentation,” in Proc. 7th Annu. ACM-SIAM Symp. Discret. Algorithms, ser. SODA’96. Phila., PA, USA: Soc. for Ind. and Appl.Math., 1996, pp. 104–113. [Online]. Available:http://dl.acm.org/citation.cfm?id=313852.313897
34. K. J. Sangston, F. Gini, and M. S. Greco,“Coherent radar target detection in heavy-tailed
compound-Gaussian clutter,” IEEE Trans. onAerosp. and Electron. Syst., vol. 48, no. 1, pp. 64–77, 2012.
35. R. Niu, P. Willett, and Y. Bar-Shalom, “Systemlevel performance of radar waveforms,” in Proc.1999 Mediterr. Conf. Control and Autom., 1999.
36. Y. Bar-Shalom, Multitarget-multisensor tracking:Advanced applications. Norwood, MA, ArtechHouse, 1990.
37. X. R. Li and Y. Bar-Shalom, “Tracking inclutter with nearest neighbor filters: Analysis andperformance,” IEEE Trans. Aerosp. and Electron.Syst., vol. 32, no. 3, pp. 995–1010, Jul 1996.
38. T. Kirubarajan, Y. Bar-Shalom, K. R. Pattipati, andI. Kadar, “Ground target tracking with variablestructure IMM estimator,” IEEE Trans. Aerosp.and Electron. Syst., vol. 36, no. 1, pp. 26–46, Jan2000.
39. X. R. Li and V. P. Jilkov, “Survey of maneuveringtarget tracking. Part V. Multiple-model methods,”IEEE Trans. Aerosp. and Electron. Syst., vol. 41,no. 4, pp. 1255–1321, Oct 2005.
40. S. J. Julier and J. K. Uhlmann, “Unscentedfiltering and nonlinear estimation,” Proc. IEEE,vol. 92, no. 3, pp. 401–422, Mar 2004.
41. Y.-S. Kim and K.-S. Hong, “An IMM algorithmfor tracking maneuvering vehicles in an adaptivecruise control environment,” Int. J. Control,Autom., and Syst., vol. 2, no. 3, pp. 310–318, 2004.
42. D. Musicki and S. Suvorova, “Tracking in clutterusing IMM-IPDA-based algorithms,” IEEE Trans.Aerosp. and Electron. Syst., vol. 44, no. 1, pp. 111–126, Jan 2008.
43. D. Musicki and B. L. Scala, “Multi-target trackingin clutter without measurement assignment,” IEEETrans. Aerosp. and Electron. Syst., vol. 44, no. 3,pp. 877–896, Jul 2008.
44. D. Musicki, R. Evans, and S. Stankovic, “Inte-grated probabilistic data association,” IEEE Trans.Autom. Control, vol. 39, no. 6, pp. 1237–1241, Jun1994.
45. H. L. V. Trees, K. L. Bell, and Z. Tian (with),Detection Estimation and Modulation Theory,Part I: Detection, Estimation, and FilteringTheory, 2nd ed. Wiley, Apr 2013.
c© 2018 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control SocietyPrepared using asjcauth.cls