-
Control System Synthesis by Root O (s) = l+K,GA (s)Ka (s)The
problem of finding the roots of theLocus Method differential
equation here appears in the
form of finding values of s which makethe denominator zero.
After these values
WALTER R. EVANS are determined by the root locus method,MEMBER
AIEE the denominator can be expressed in
factored form. The zeros of the functionSynopsis: The root locus
method deter- The opening section in this paper, Oo/Oi can be seen
from equation 1 to be themines all of the roots of the differential
Background Theory, outlines the over-all zeros of G;,(s) and the
poles of Ga(s).equation of a control system by a graphical The
function can now be expressed asplot which readily permits
synthesis for pattern of analysis. The following sec- h idesired
transient response or frequency tion on Root Locus Plot points out
theresponse. The base points for this plot great usefulness of
knowing factors of the Go (1-s/qi)(1-s/q2)On the complex plane are
the zeros and poles open loop transfer function in finding the is
(1- s/rl) (1- s/r2) (2)of the open loop transfer function, which
are roots.readily available. The locus of roots is a rootsplot of
the values of s which make this The graphical nature of the method
Tep constan Kpeand theeo t fotransfer function equal to -1 as loop
gain is requires that specific examples be depend upon the specific
system but forincreased from zero to infinity. The plot used to
demonstrate the method itself control systems y is often zero and
Kc iscan be established in approximate form by . . often
1inspection and the significant parts of the ulder the topLis:
Single Loop Example The full power of the Laplace Trans-locus
calculated accurately and quickly by Multiple Loop System, and
Correctiveuse of a simple device. For multiple loop Networks. The
topic Correlation with form2 or an equivalent method now
cansystems, one solves the innermost loop Other Methods suggests
methods by be used. The transient response of thefirst, which then
permits the next loop to be which experience in frequency methods
output for a unit step input, for example,solved by another root
locus plot. The . is given by equation 3resultant plot gives a
complete picture of can be extended to this method. Thethe system,
which is particularly valuable topic Other Applications includes
the nfor unusual systems or those which have classic problem of
solving an nth degree Go(t)=1- A etit (3)wide variations in
parameters. polynomial. Finally, the section on
Graphical Calculations describes the key The amplitude Ai is
given by equationHE root locus method is the result of features of
a plastic device called a 4an effort to determine the roots of the
"Spirule", which permits calculations to A-be made from direct
measurement on the A =- -Vdifferential equation of a control system
plot srz
bv using the concepts now associated Plot. The closed loop
frequency response, onwith frequency response methods.' The the
other hand, can be obtained by sub-roots are desired, of course,
because they Backgroundstituting s=j into equation 2. For-describe
the natural response of the sys- tunately, the calculation in
finding Ai ortem. The simplifying feature of the The over-all
pattern of analysis can be 6o/60(jw) involves the same problem
ofcontrol system problem is that the open outlined before
explaining the technique multiplying vectors that arises in
makingloop transfer function is known as a of sketching a root
locus plot. Thus a root locus plot, and can be calculatedproduct of
terms. Each term, such as consider the general single loop system
quickly from the resultant root locus1/(1+Ts), can be easily
treated in the shown in Figurel. plot.same manner as an admittance
such as Note that each transfer function is of1/ (R+jx). It is
treated as a vector in the the form KG(s) in which K is a static
gainsense used by electrical engineers in constant and G(s) is a
function of the Paper 50-il, recommended by theAIEE
Feedback-sligaccircuits. The phase shift and complex number. In
general, G(s) has Control Systems pCommittecomtpeand a proed by
th
attenuation of a signal of the form es1 both numerator and
denominator known tion at the AIEE Winter Genlerai Meeting,
Newbeing transmitted is represented by in factored form. The values
of s which York, N. Y., January 30-February 3, 1950. Manu-1/(1+Ts)
in which 8 in general is a com- make the function zero or infinite
can able for printing November 22, 1949.plex number. The key idea
in the root therefore be seen by inspection and are WALTER R. EVANS
is with North American Avia-locus method is that the values of 8
called zeros and poles respectively. The tion, Inc., Downey,
Calif.whicb make transfer function around the closed loop transfer
function can be ex- The assitance givhentbyhis fellow woPrkers, K.
R.loop equal to -1 are roots of the differ- pressed directly from
Figure 1 as given in Jackson and R. M. Osborn, in the preparation
of thispaper. In particular, Mr. Osborn contributed theential
equation of the system. equation 1 circuit analysis example.
66 Evrans-Control System Synthesis AJEE TRANSACTIONS
-
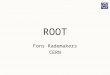
ei 8r 80 Figure 1 (left). General block diagram iw'~~~~~~~~. IU
(S
Figure 3 (right). Single loop root locusjWc
LOCUS OF S FOR
I L eS~.8 00+ 01 + 0. -1lo -_*00
Root Locus Plot
The open loop transfer function is so that the angles in turn
can be visual-typically of the form given in equation- 5. ized. For
any specific problem, however,K,MG(s)KgG6(s) many special parts of
the locus are es-
K(lTs032+ 032 tablished by inspection as illustrated ins(1+
Tis)[(S+0)2+ 32] (5) examples in later sections. Surprisingly
few trial positions of the s point need beThe parameters such as
T, are constant assumed to permit the complete locus to a value of
s just above the real axis. The
for a given problem, whereas s assumes be sketched. decrease in
Oo from 180 degrees can bemany values; therefore, it is convenient
After the locus has been determined, made equal to the sum of 41
and O2 if theto convert equation 5 to the form of one considers the
second condition for a reciprocal of the length from the
trialequation 6. root, that is, that the magnitude of point to the
origin is equal to the sum of
KMG,(s)KgGp(s) be unity. In general, the reciprocals of lengths
from the trialK,,G,(s)K#Gp(s) one selects a particular value of s
along point to - 1/T1 and -1/T2. If a dampingK(l/T2+s)T2 [032+cW32]
the locus, estimates the lengths of the ratio of 0.5 for the
complex roots is de-
s(1/T1+s)T1[(s+ 03+jco3) (s+ U3-JCO3I vectors, and calculates
the static gain sired, the roots ri and r2 are fixed by the(6) K,,K
= 1/G,(s)Gf(s). After acquiring intersection with the locus of
radial lines
The poles and zeros of the function are some experience, one
usually can select at 60 degrees with respect to negativeplotted
and a general value of s is as- the desired position of a dominant
root to real axis.sumed as shown in Figure 2. determine the
allowable loop gain. The In calculating K for 8= ri, it is con-Note
that poles are represented as dots, position of roots along other
parts of the venient to consider a term (1+ Tls) as a
and zeros as crosses. All of the complex locus usually can be
determined with less ratio of lengths from the pole - 1/Ti toterms
involved in equation 6 are repre- than two trials each. the s point
and from a to the origin re-sented by vectors with heads at the
gen- An interesting fact to note from equa- spectively. After
making gain K= 1/-eral point s and tails at the zeros or poles.
tion 6 is that for very low gain, the roots [G(s)],$=, a good first
trial for finding r8The angle of each vector is measured with are
very close to the poles in order that is to assume that it is near
-1/T2 andrespect to a line parallel to the positive corresponding
vectors be very small. For solve for (1/T2+s). After the roots
arereal axis. The magnitude of each vector very high gain, the
roots approach in- determined to the desired accuracy, theis simply
its length on the plot. finity or terminate on a zero. over-all
transfer function can be expressed
In seeking to find the values of s which as given in equation
8.make the open loop function equal to -1, Single Loop Example 1the
value -1 is considered as a vector /whose angle is 180 degrees =rn
360 de- Consider a single loop system such as (i- 1 1 (8)grees,
where n is an integer, and whose shown in Figure 1 in which the
transfer r1 r2/ r1magnitude is unity. Then one can con- functions
are given in equation 7. The procedure in handling a multiplesider
first the problem of finding the locus K loop system now can be
explained.of values for which the angle condition KMG$(s) = K+ G(s)
= 1(7)alone is satisfied. In general, one pictures (1 + Tis) (1+
T2s)s' Multiple Loop Systemthe exploratory s point at various posi-
The poles of the open loop function aretions on the plane, and
imagines the lines at 0, - 1/Ti and -1/T2 as represented by
Consider a multiple loop system infrom the poles and zeros to be
constructed dots in Figure 3. which the single loop system just
solved
The locus along the real axis is deter- is the forward path of
another loop, asmined by inspection because all of the shown in
Figure 4.
_S + b3 - -w3- --< angles are either 0 degrees or 180
degrees. 0,/0i is given in factored form by equa--
-
Io < mum build-up rate, overshoot, naturalr < >
frequency of oscillation, and the damping
rate as effective clues in solving thisproblem.
Other ApplicationsFigure 4 (above). Multiple loop block diagram
i Many systems require a set of simul-
\-l/ ~~~taneous equations to describe them andFigure 5 (right).
Multiple loop root locus tare said to be multicoupled. The
corre-sponding block diagrams have several in-
angle at which the locus emerges from ri puts to each loop so
that the root locuscan be found by considering a value of s method
cannot be applied immediately.close to the point ri, and solving
for One should first lay out the diagram sothe angle of the vector
( s-ri). that the main line of action of the signalsAssume that the
static loop gain de- forms the main loop with incidental
sired is higher than that allowed by the coupling effects
appearing as feedbacksgiven system. The first modification and feed
forwards. One then proceeds tosuggested by the plot is to move the
ri These examples serve to indicate the isolate loops by replacing
a signal whichand r2 points farther to the left by obtain-
reasoning process in synthesizing a con- comes from within a loop
by an equivalenting greater damping in the inner loop. If trol
system by root locus method. An signal at the output, replacing a
signalthese points are moved far to the left, the engineer draws
upon all of his experience, entering a loop by an equivalent signal
atloci from these points terminate in the however, in seeking to
improve a given the input. One can and should keep thenegative real
axis and the loci from the system; therefore, it is well to
indicate physical picture of the equivalent systemorigin curve back
and cross the jw axis. the correlation between this method and in
mind as these manipulations are car-Moving the -1/T point closer to
the other methods. ried out.origin would then be effective in
permit- The techniques of the root locus methodting still higher
loop gain. The next as- Correlation with Other Methods can be used
effectively in analyzing elec-pect of synthesis involves adding
correc- tric circuits. As a simple example, con-tive networks. The
valuable concepts of frequency re- sider the lead-lag network of
Figure
sponse methodsi are in a sense merely ex- 7(A).Corrective
Networks tended by the root locus system. Thus It can be shown that
the transfer func-
a transfer function with s having a com- tion of this network is
as given in equa-Consider a somewhat unusual system plex value
rather than just a pure imagi- tion 9
which arises in instrument servos whose nary value corresponds
to a damped sinu- V0 (1+RiCis)(1R2C2s)R3open loop transfer function
is identified soid being transmitted rather than an un- -
(1+R2C2S)R3+by the poles pi and P2 in Figure 6(A). As damped one.
The frequency and gain VE (1+RiCis)(1+RiCiS)Ri+loop gain is
increased from zero, the roots for which the Nyquist plot passes
through Rl [1+ (R2+Ra) C2s]which start from pi and P2 move directly
the -1 point are exactly the same values (9)toward the unstable
half plane. These for which the root locus crosses the jw, The
denominator can be factored alge-roots could be made to move away
from axis. Many other correlations appear in braically by
multiplying out and findingthe jc& axis if 180 degrees phase
shift were solving a single problem by both methods. the zeros of
the resulting quadratic. Asadded. A simple network to add is three
The results of root locus analysis can be an alternative, it will
be noted that thelag networks in series, each having a time easily
converted to frequency response zeros of the denominator must
satisfyconstant T such that 60 degrees phase data. Thus one merely
assumes values of equation 10shift is introduced at p,. The
resultant s along the jco axis, estimates the phaselocus plot is
shown in Figure 6(B). angles and vector lengths to the zeros andThe
gain now is limited only by the re- poles, and calculates the sum
of the owl
quirement that the new pair of roots do angles for total phase
shift and the prod- Pi pinot cross the jcw axis. A value of gain is
uct of lengths for attenuation. The in-selected to obtain critical
damping of verse problem of determining zeros andthese roots and
the corresponding posi- poles from experimental data is the
more
I
tions of all the roots are shown in Figures difficult one. Many
techniques are al-6(A) and 6(B) as small circles. ready available,
however, such as drawing I
Actually, greater damping could be asymptotes to the logarithmic
attenua- o 0r-oachieved for roots which originate at Pi tion curve.
For unusual cases, particu- /\and P2 if a phase shifting bridge
were used larly those in which resonant peaks are vrather than the
3-lag networks. Its involved, the conformal mapping
tech-transferfunction is (3-Ts)/(1+Ts) and is nique originated by
Dr. Profos of Swit-of the "nonminimum phase" type of cir- zerland
is recommended.3cuit. The transient response is described by p
Since these types of correction are the poles of- the transfer
function. The2somewhat unusual, it is perhaps well to inverse
problem in this-case is to locate the A Bpoint out that the
analysis has been yeni- poles from an experimental transient re-
Figure 6. (A) Basic system. (B) Correctedfled by actual test and
application. sponse. One might use dead time, maxi- system
68 Evans-Control System Synthesis AIFE TRANSACTIONS
-
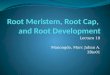
Cs ~~~~~~~~Figure 7 (left). (A)Circuit diagram. (B)
Root locusFisure 8 (right).
A
10R,0, 5c. (A*R.c2 I order term. Solve for the roots of the
Several procedures are possible, but the
first loop which corresponds to the quan- over-all purpose is to
successively rotatetities in brackets above and proceed as the arm
with respect to the disk through
(1/R1CI+a)(1/R2C2+s)R3(R1C1)(R2c2) before for the multiple loop
system. If each of the angles of interest. Thus
for[1/(R2+Rs)C2+aj(R2+RP)C2RI the roots close to the origin are of
most adding phase angles, the disk is held
=-1 (10) interest, substitute J= l/x first and solve fixed while
the arm is rotated from a polefor root values of x. Other
combinations to the horizontal, whereas the two move
Tesentdvectorsdingthis exre are rep- are, of course, possible
because a single together in getting aligned on the
nextrscentedinaccordingBto Thetorootlus root locus basically
determines the factors pole. For multiplying lengths, the disk
isscheme in Figure 7(B). The two roots of the sum of two terms,
held fixed while the arm is rotated fromdotsare thereby broundedas.
shown bycth two The root locus method is thus an an- the position
where a pole is on the straightdotsuand the cross.ma Ther
exaccateylatis alytical tool which can be applied to line to the
position where the pole is oncould be estphicat medhor s. other
problems than control system syn- the logarithmic curve. Rotations
aremiedlocusbyfgraph modis. simply.in- thesis for which it was
developed. But in made in the opposite directions for zerosThe
locus of roots now is simply in-
tervals along the negative real axis be- attacking a new problem
one would prob- than they are for poles.tween the open loop zeros
and poles as ably do well to try first to develop ashown in Figure
7 (B). The exact location method of analysis which is natural for
Conclusionsof the roots along these intervals is deter- that
problem rather than seek to apply
any existing methods. The definite opinion of engineers
usingmined in the usual way. Note that the * this method is that
its prime advantageconstant in equation 10 is of the form GR'Cot in
which R' is the effective value of Graphical Calculations is the
complete picture of a system whichR'Ci, in whichR'istheeffective
value ofthe root locus plot presents. ChangingR2 and Ra in
parallel. The root locus plot is first established an open loop
parameter merely shifts a
In more complicated networks, the ad- in approximate form by
inspection. Any pointandmodifiesthelocus. Bymeansofvantages of the
root locus concept over sinfcn fombinpcinAn
potadmdfeshelu.Byensfvantagebraic metherod tlocusbec reatoeri
significant point on the locus then can be the root locus method,
all of the zeros andpalgbrticularhadvantagerisein greatainin ats
checked by using the techniques indicated poles of the over-all
function can be de-particular advantage oS t retalning at all in
this section. Note that only two cal- termined.betwmee
thearover-all netwk parelametensh culations are involved, adding
angles and Any linear system is completely de-betwenth
ove-allnetwrk cirmeter multiplying lengths. Fortunately, all of
fined by this determnination, and its re-and the parameters of
individual circuit these angles and lengths can be measured sponse
to any particular input functionelements,
at the a point. Thus angles previously can be determined readily
by standardIn the classical problem of finding*Inots, the
classifereal problen fivending pictured at the zeros and poles also
ap- mathematical or graphical methods.roots, the differential
equation is given inthe form of a sum of terms of successively pear
at the s point but between a hori- Refhigher order. This can be
converted tothe form shown in equation 10 zeros and poles. A piece
of transparent i. PRINCIPLES OF SERVOMECHANISMS (book),paper or
plastic pivoted at the s point can G. S. Brown, D. P. Campbell.
John Wiley and
s'+as +bs'2+ M be rotated successively through each of Sons, New
York, N. Y., 1948.2. TRANsIrNTs IN LINBAR SYSTBMS
(book).-[(s+a)s+b]s+ . .. +m (11) these angles to obtain their sum.
M.F. Gardner,J.L.Barnes. JohnWileyandSons,
The reader can duplicate the "spirule" New York, N. Y.,
1942.This corresponds to a block diagram with two pieces of
transparent paper, one 3. GRAPHIcAL ANALYSIS OF CONTROL SYSTBMS,W.
R. Evans. AIEE Transactions, volume 67,
with another loop closed for each higher for the disk and the
other for the arm. 1948, pages 547-51.
No Discussion
1950, VOLUME 69 Evans-Control System Synthesis 69