Embed Size (px)
Citation preview

Control & Robotics Control & Robotics LabLab
Presented By: Yishai Eilat & Arnon Sattinger
Instructor: Shie Mannor
Project Presentation

System Setup
camera

Objectives
Locating a ball in a Foosball table based on a video stream
Real time performances
A robust solution
Simplicity

The Solution
Tracking & Estimation process Increase success probability
Enable limited search
Searching the ball in a restricted area
Reduce calculation Time
Eliminate irrelevant areas

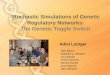
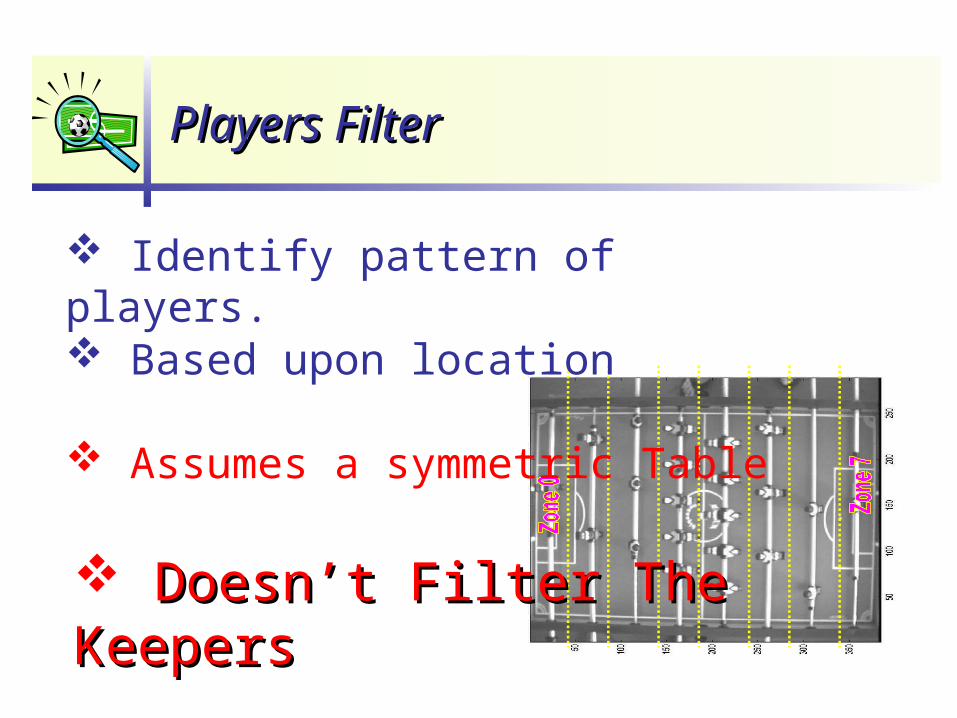
Tracking & Estimation Tracking & Estimation sequencesequence
Based on continuity
Linear movement
Needs history
v
Search in full size window
Calc. Movement
Vector
Search in window around the estimated
position
Found?
Enlarge Window
No
Update & Go to
Next Frame
Yes
The Main LoopThe Main Loop

Problems in Finding The BallProblems in Finding The Ball
Smeared ball
Eclipsed ball
Black & white picture
Noises
Real-Time

The Main Idea The Main Idea
Find Pixels Above Threshold = Candidates
Filtering:
Form Objects
Subtract a const Background
Noise Players
Decide Who is the ball
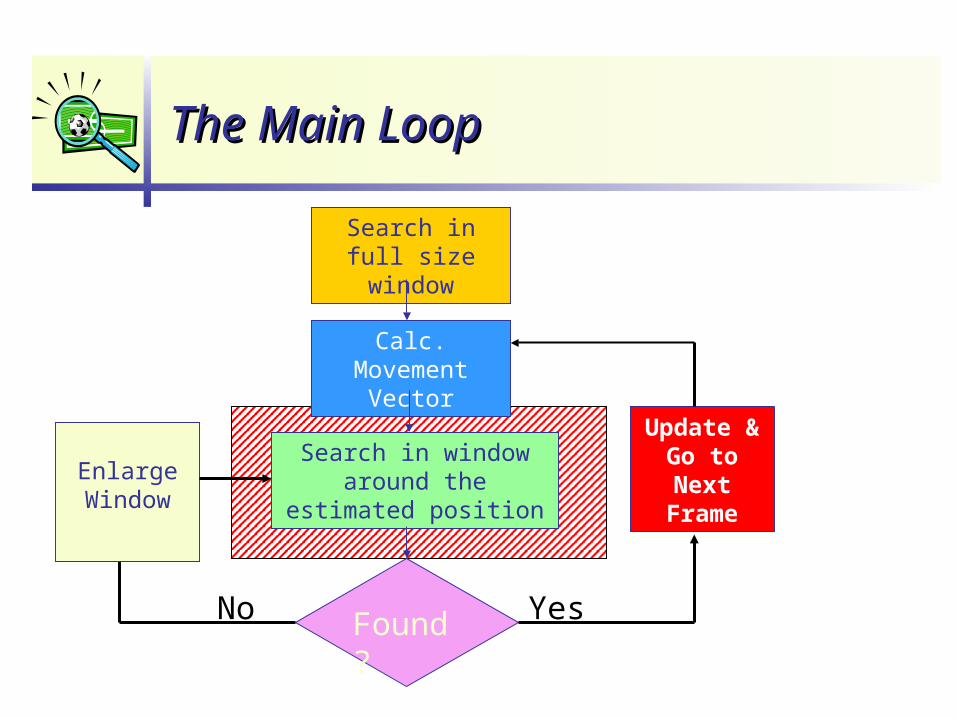
Players FilterPlayers Filter
Identify pattern of players.
Based upon location
Assumes a symmetric Table
Doesn’t Filter The Doesn’t Filter The Keepers Keepers

Decision partDecision part
Rule out:
objects that are too small
objects in keeper zone (if an object outside the Keeper zone exists)
Chose the closest object to the Estimated Position
Live show
The short clip will demonstrate the various features we discussed.

Future Improvements Future Improvements
The Table
The Camera
Software optimization
Integrate mechanic sensors

Thank you !
The End.