Embed Size (px)
Citation preview

Control Protection of SHP and MHP plant
CONTENTS
1 HYDRO SYSTEM CONTROL 1
1.1 MECHANICAL CONTROL 1 1.1.1 ELECTRICAL ACTUATORS 1
1.1.2 HYDRAULIC ACTUATORS 1
1.2 PLC CONTROL 2
1.3 SYNCHRONISATION 2
2 CONTROL PANEL SPECIFICATION 2
2.1 CONTROL PANEL COMPONENTS 3
2.2 CONTROL PANEL DESIGN AND CONNECTIONS 3
2.3 METERING 3
3 SYNCHRONOUS GENERATORS OPERATION 4
3.1 VOLTAGE CONTROL 4
3.2 AUTOMATIC VOLTAGE REGULATORS - AVR’S 4
3.3 POWER FACTOR AND REACTIVE POWER 5
3.4 POWER FACTOR FOR VOLTAGE CONTROL 5
3.5 POWER FACTOR CONTROL 5 3.5.1 SYNCHRONOUS MACHINES POWER FACTOR CONTROL 5
3.5.2 INDUCTION MACHINE POWER FACTOR CONTROL 6
3.6 ELECTRICAL GENERATOR PROTECTION 6
3.7 GENERATOR INSULATION PROTECTION 6
3.8 GENERATOR MECHANICAL PROTECTION 7 3.8.1 BEARING PROTECTION USING TEMPERATURE SENSORS. 7
3.8.2 GENERATOR OVER SPEED 7
4 SYSTEM EARTHING 7
4.1 LV CONNECTED 7
4.2 HV CONNECTED 7
5 ELECTRONIC LOAD CONTROL 8
5.1 THYRISTOR SYSTEMS - ADVANTAGES AND DISADVANTAGES 8
5.2 FAST SWITCHING IGBT 8
5.3 BASIC ELC ARRANGEMENT 8
5.4 ELC BURST FIRING OPERATION 10
5.5 PULSE WIDTH MODULATION 11
5.6 FREQUENCY PROTECTION 12
5.7 STAND ALONE SYSTEM - SYNCHRONOUS GENERATOR WITH ELC 12
5.8 ELC BALLAST LOADS 12

DR-S5-RevA.doc Section 5 Page 1
6 PERMANENT MAGNET GENERATORS 12
1 Hydro System Control A typical small hydro or micro hydro scheme will comprise a variety of electro-mechancial
systems. All of these systems will need monitoring and control - ideally automatically if not
manually. Specific items that need control and monitoring are:
1. Intake – e.g. screen cleaning and level monitoring
2. Turbine operation:
3. Turbine spear valve or vane control
4. Main Inlet Valve
5. Bearings
6. Generator
7. Excitation
8. Synchronisation
9. Power Factor
10. Bearings and windings
Control can be manual or automatic or a mixture of the two. The choice will depend on the
particular situation, scheme size, location, labour costs and availability, connected loads etc.
1.1 Mechanical Control
Automatic control of mechanical items is usually arranged by using electric or hydraulic
actuators. The key features of these two types of actuators are given below.
1.1.1 Electrical actuators
1. Can provide linear or rotary actuation
2. Can be pulsed or continuous operation
3. Can provide very slow and small movements reliably
4. Can provide accurate position and torque feedback signals and indications
5. Relatively expensive for good quality units
1.1.2 Hydraulic actuators
1. Usually provide linear actuation
2. Can be pulsed or continuous operation
3. Speed of operation dependant upon oil temperature (can use expensive temperature
compensated flow control valves)
4. Difficult to achieve very small movements
5. Require good quality maintenance, oil changing and good filtering. A corollary of this is
tha a certain level of understandings of hydraulics will be needed in operation staff
6. The potential for oil pollution from leakages needs to taken into account by the
specification of bunds or other protection systems.
7. Are relatively cheap

DR-S5-RevA.doc Section 5 Page 2
1.2 PLC control
PLC systems are commonly available from a wide variety of manufacturers. They can form
the basis of dedicated hydro control and protection systems. Many systems are available in
modular format, with a wide variety of analogue and digital inputs and outputs. Systems can
be tailored to suit a particular application.
PLC systems can be connected to SCADA systems for data logging and remote access and
control. The use of standard PLC modules means there is a requirement to specify and
program them to suit the particular application. PLC software programming requires skill and
experience. The software designer needs to understand the mechanical, electrical and
hydraulic characteristics of the equipment that will be controlled – for example opening a
main pipeline valve needs to be done slowly to avoid dangerous surge pressures. Software
needs rigorous checking and debugging.
Note also that specialist PLC based systems specifically designed for hydro applications are
available. Such systems are pre-configured and programmed to operate a turbine and
generator. For this reason, their use can save on system design and implementation time.
However, such systems may not suit the requirements of your particular system and might be
difficult to adapt for particular system requirements that are not included in the standard
package.
1.3 Synchronisation
This subject will is covered in Section 7 of this manual. Suffice it to say that synchronisation
can be achieved by:
1. Controlling turbine speed on no load until it can be connected with the grid – requires
accurate and reliable turbine speed control based on water flow control or deflector
position
2. Controlling the load on the generator with fixed hydraulic power into the turbine until the
unit is in synch with the grid – requires Electronic Load Control in some form and a
synchronous generator. ELC system operation are covered below.
2 Control panel specification
Hydro system control panels need careful design and specification. The control panel will
usually include a selection of standard electrical protection and control modules and
protection relays as well as a PLC system, metering, contactors and relays, a synchroscope,
possibly data logging and remote monitoring facilities.
Note that the term “relay” is used in two senses:
for control and protection modules such as a “synch check relay”
for simple control relays – electrical switches
Care must be taken to ensure that the specified components are compatible with each other.

DR-S5-RevA.doc Section 5 Page 3
2.1 Control panel components
Hydro systems can have a very long operating life and the electrical components should be
suitable specified to match this. Components should be manufactured to suitable international
standards. Components must be compatible with each other, for example EMC interference
issues can arise. Backup power supplies are usually required to maintain cabinet power during
grid outages – can use batteries or UPS systems.
2.2 Control panel design and connections
Clear design and “as built” drawings must be created and maintained – these are vital for
successful build and operation. There will be a large number of electrical terminals for control
and monitoring cabling. These terminals need to be clearly labelled and logically laid out to
facilitate installation and connection and to make subsequent checking and fault finding
possible.
Consideration must be made at an early stage as to cable entry and cable routing within the
power house
Power Cabinets
A power cabinet usually refers to the section of control panel containing the main power
connections for the generator and load / grid. There will be three main functions:
1. Providing generator protection functions – e.g. overcurrent and earth fault. These
functions are usually provided using a suitable circuit breaker and / or protection relays
2. Providing a connection between the generator and the load / grid – usually using a
contactor or motorised circuit breaker
3. Providing terminals / connections for the power cabling
4.
Contactors compared with motorised breakers for connection
The choice mainly depends on system size:
1. The smallest motorised circuit breakers are around 400 kVA, and basic units can be de-
rated to about 60%. These will be Air Circuit Breakers (ACBs) usually referred to as
Moulded Case Circuit Breakers (MCCB)
2. Note that the maximum reasonable contactor size is 500 kVA
3. A breaker of some sort will usually be required to provide over current protection
2.3 Metering
A hydro control system requires electrical metering to monitor operation and identify
problems. Traditional analogue panel meters provide easy to read displays, but have limited
functionality. Often many separate meters are required – adding to cost and panel space
requirements. Multi function digital panel meters can provide many items of information from
a single meter. Many digital meters can be connected directly to the PLC systems via Modbus
or similar communication systems. This enables the PLC to monitor electrical parameters and
for them to be available to SCADA systems for logging and remote monitoring. The typical
parameters that can be monitored by a digital panel meter include:
1. Three phase volts and current
2. Power, power factor and cummulative power – often by individual phases
3. Frequency
4. Peak values of current and voltage
5. Harmonic distortion information

DR-S5-RevA.doc Section 5 Page 4
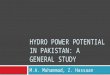
3 Synchronous Generators Operation Synchronous generators have a wound set of windings on the rotor. The current through the
rotor windings can be controlled and hence the voltage induced and the current capability of
the generator can be controlled. The control is done by the AVR – Automatic Voltage
Regulator. The figure below shows the basic control process of synchronous generator
operation.
Fig.3.1 – control of a synchronous generator
3.1 Voltage Control
Referring to Fig.3.1 above, the rotor current determines the magnetic field produced by the
rotor – this determines the induced voltage produced by the stator and the ability of the stator
to export power. If the generator is in stand alone mode the output voltage of the generator
will increase as the rotor current is increased. If the generator is grid connected the grid
system will determine generator voltage – changing the excitation will change the output
power factor.
3.2 Automatic Voltage Regulators - AVR’s
Modern AVR’s are solid state devices usually supplied by the generator manufacturer. AVR’s
monitor the main stator output voltage and produce a suitable D.C. voltage output to the
exciter. They can (and do) fail in service. The most common cause of failure is voltage spikes
produced by lightning. Other causes of failure are dampness and vibration. For these reasons,
it is advisable to:
1. Use surge arrestors on the line to a power house.
2. Consider mounting the AVR away from the generator in a suitable environment such as
in the control cabinet.
Manufacturers replacements are relatively expensive – typically £150 for a 10 kW machine
and £500 – 700 for a 500 kW machine (prices Sterling).
Stator Winding
Main rotor windingExciter Rotor Winding Rotating Diodes
Exciter Stator
Winding
AVR
Poweroutput
Voltage signal and
supply to AVR
Excitation from AVR
DC voltage
Magnetic flux
linkageMagnetic flux
linkage
A.C.
current
D.C
Current

DR-S5-RevA.doc Section 5 Page 5
3.3 Power Factor and Reactive Power The Power Factor is a measure of the relative amounts of Real and Reactive power
components. Reactive Power is the component of power where the current and voltage
waveforms are 90 degrees out of phase. Reactive power can do no useful work. However,
despite this, reactive power for loads has to be produced somewhere. Reactive power
produced by capacitors or generators has to go somewhere hence the need for a “reactive
power balance”.
Note carefully that the of the use of terms “leading” and “lagging” power factor – can mean
different things to different engineers. It is preferable to use of “export” or “import” reactive
power.
3.4 Power Factor for voltage control
A key effect of reactive power flows on power lines is that they cause a volt drop in the same
way that “real” power flows do. The voltage at a generator may be lowered by importing
reactive power which may effect its performance somewhat. Systems are in use that control
voltage at the generator by controlling the amount of reactive power imported or exported.
Note that any reactive power imported will have to be paid for. Conversely, exported reactive
power can be sold however, note that usually suppliers will want a firm capacity that can be
controlled.
3.5 Power Factor Control
Power Factor Control only applies to generators which are connected to the grid – or run in
parallel.
In a stand alone system, the reactive power supplied by the generator must match the reactive
power demand of the loads.
3.5.1 Synchronous Machines Power Factor Control
A Power Factor Control unit (PFC) will be connected to the AVR of the synchronous
generator. The PFC will take over control of the AVR and hence the excitation output when
power factor control is enabled (when the system is on the grid). When the generator is “over
excited” the system will export reactive power – it will be Capacitive. When the generator is
“under excited” the system will import reactive power – it will be Inductive. Power Factor
Control units can usually be set to either:
Maintain a constant power factor
Maintain a constant amount of reactive power
Usually a PFC unit is enabled by an auxiliary contact on the main contactor / breaker. PFC
units will not work at low generator powers – around 15 – 25% of rated generator power.
This figure varies with manufacturer, and can be significant factor in run of river systems
where the operator wants to run at low power sometimes.
When two or more generators are connected in parallel – either stand alone or grid connected
– care must be taken to avoid circulating reactive currents. It is not possible for two AVR’s to
operate at exactly the same voltage, and any difference will manifest as circulating current.

DR-S5-RevA.doc Section 5 Page 6
Quadrature Droop circuits are used to reduce excitation when reactive power flow increases
and will naturally balance reactive power supply between two or more generators. Other Load
Balancing circuits / relays are also available when running generators in parallel.
3.5.2 Induction Machine Power Factor Control
An Induction generator will inherently import reactive power, to provide it’s excitation. This
is usually provided by capacitor banks mounted near to the generator. Banks of capacitors are
used to provide power factor correction – the capacitors are switched in / out by a control unit
that is monitoring the system power factor. The switching of capacitors is controlled to
maintain a relatively constant power factor at the station terminals. In practice, this kind of
arrangement wWorks well and is commonly used. Note that the cost of the equipment is
considerable and that there will be the service related costs for replacing failed exciter
capacitors.
3.6 Electrical Generator Protection
Electrical protection is achieved using:
1. Overcurrent protection on the generator breaker
2. Earth fault protection on the generator breaker (and on generator earth during run up)
3. Core (winding) temperature monitoring
4. Limitation on the maximum excitation current
5. Stability limitations
6. Pole slipping protection, for larger generators
3.7 Generator Insulation Protection
Generator core insulation is required to ensure electrical separation of windings and
separation of the windings and the core material. Insulation resistance is reduced by
dampness. Insulation resistance will be reduced on a new machine, the varnish will not have
been completely cured. It is vital that the insulation resistance of the generator is sufficiently
high prior to the generator producing any voltage. Different grades of winding insulation are
available from manufacturers it is advisable to get the best grade available. The best grades
are sometimes referred to as “Marine Grade” or “Double Dipped Double Baked”, the latter
referring to the application and curing of the varnish.
For the reasons given above, the insulation resistance should be measured prior to generator
use and after shutdowns. All control and protection equipment must be disconnected prior to
insulation testing. Measure using a “megger” resistance tester which can produce voltages
higher than the operating voltages of the generator, usually 2 times normal operating voltage.
The required insulation resistance will be specified by the manufacturer, usually it should be
> 1 Meg Ohm, often 10-20 Meg Ohms.
If the insulation resistance testing indicates a low resistance the windings must be dried.
Drying can be achieved in several ways:
1. A good method is to short the generator main windings and inject a controllable d.c.
current into the exciter winding whilst rotating the machine at rated speed. Up to full
rated current may be induced and this will heat the core and dry the windings.
2. An alternative is to use air heaters blowing into the generator whilst it is rotated slowly

DR-S5-RevA.doc Section 5 Page 7
3. Anti condensation heaters can be installed in the generator to keep it warm when it is not
running – but this requires an external power source.
3.8 Generator Mechanical Protection
3.8.1 Bearing protection using temperature sensors.
Different sensor types are available but the most commonly used are the so called PT100
(platinum resistance sensor) resistance type which are robust and sufficiently accurate. The
sensor is made of platinum which has a particularly linear resistance vs temperature
characteristic. Thermocouples or thermistors are alternatives.
Look for an unusually rapid rise in temperature to indicate the imminent failure of a bearing.
Some consideration should be given to the generator bearings during installation of the
electro-mechanical plant at the site. It is important to avoid shock loading on bearings and
windings and to make sure adequate provision is made to support the generator bearings
during transport.
3.8.2 Generator Over speed
When a turbine is un-loaded, the shaft power it is producing will cause it to run into an over
speed condition. The amount of over speed depends on the type of turbine and the particular
design. Generators must be rated to accommodate this over speed – otherwise it is likely that
the rotor windings will be forced out under larger than normal centrifugal force and make
contact with the stator resulting in a broken generator. Some generators can be supplied with
over speed banding on their rotors – at a cost. Most smaller generators will tolerate over
speed for short periods.
4 System Earthing
We will consider the two normal cases of so called low voltage connections – LV and high
voltage connections HV connected systems.
4.1 LV connected
In this case, the scheme operator / owener will need to provide a station earth. All metalwork
shall be connected to this earth. The distributed network operation (utility), will (usually)
provide a four wire connection with the neutral connected to earth at their transformer.
4.2 HV connected
In this case there will usually be 2 earths:
The HV earth – for earthing the HV breaker and cabling
The LV earth for earthing metalwork, LV star point etc.

DR-S5-RevA.doc Section 5 Page 8
These two earths must be physically separate. Often the HV earth is taken in insulated cable
about 50m away from the power house. If the two earths are physically close, or connected,
the site becomes a “hot zone”. In this situation the issues of step and touch potentials must be
addressed.
5 Electronic Load Control An Electronic Load Control (ELC) is a system to balance the power produced by a generator
with the total load so that frequency (speed) is kept stable. ELCs are mostly used in stand
alone systems, but can also be used to control synchronisation to the grid. There are two basic
types: i) Thyristor based and ii) Fast switching transistors that usually use FETs.
Thyristor load controller can feature either “Phase angle” control or “Burst firing” control.
5.1 Thyristor Systems - Advantages and Disadvantages
Table 5.1 below summarises the advantages and disadvantages.
Phase angle thyristor Burst firing thyristor
Fast response, chops each half cycle Slower response – requires a large number
of cycles to operate over
Voltage spike on generator waveform every
half cycle. Can cause electro magnetic
interference – requires filtering
No voltage spike as switching is done at
zero volts – no filtering required
Fine resolution – each half cycle can be
chopped
Limited resolution – can only switch on / off
whole cycles
Robust Thyristor technology can withstand voltage spikes
5.2 Fast Switching IGBT
Can provide a very rapid response. Fast switching (kHz or above) means a smooth output
waveform. IGBTs are still not as robust as thyristors in withstanding voltage spikes. Note that
IGBTs require very careful circuit layout design and manufacture to avoid the effects of stray
capacitances. In theory IGBTs should be better than thyristor based systems, but there is not
enough service experience yet to see what level of failure there is in the service environment.
5.3 Basic ELC arrangement
The diagram below shows the utline arrangement for an ELC system

DR-S5-RevA.doc Section 5 Page 9
ELC operation - ballast load voltage
The following graphs show the ballast voltage at a variety of thyristor firing angles. The
coloured solid line shows the ballast load voltage waveform. The dotted line shows the main
load voltage waveform.
Firing angle = 30 degrees
Firing angle = 80 degrees
Electronic Load
Controller
Main Load
Ballast Load
Generator
Waveform
Waveform

DR-S5-RevA.doc Section 5 Page 10
Firing angle = 120 degrees
5.4 ELC burst firing operation
In Burst Firing mode the thyristor(s) are turned on for a number of whole cycles. Switching is
at zero voltage and usually controlled over periods of one or two seconds. Over one second
there are 50 cycles – the thyristor(s) can be turned on for between 1 and 50 cycles per 50
cycles – resolution is 2%. The generator speed will vary during each second, at the beginning
of each second it will slow down, then when the thryistor(s) turns off it will speed up. ELC
burst firing operation can be used for synchronisation however, it is not suitable for stand
alone system control.
The graphs below show the ballast voltage using burst firing thyristor operation. The graphs
use a 10 cycle period for clarity. Normally a 50 cycle period is used in practice.
20% on time
-1
0
1

DR-S5-RevA.doc Section 5 Page 11
40% on time
80% on time
5.5 Pulse width modulation
Control of the ballast load power is done at high frequency using high power transistors
(IGBT’s) to control power to the ballast. The relative width of pulse is varied to control the
ballast power. Pulse width modulation operates at high frequency – several kHz or above. The
same arrangement is commonly used in motor speed controllers.
Advantages:
Smooth power waveform for consumers
Common electronic components
Disadvantages:
Very susceptible to voltage transients and spikes – damage due to lightning is common.
IGBT’s are not as robust as good quality Thryristors.
-1
0
1
-1
0
1

DR-S5-RevA.doc Section 5 Page 12
5.6 Frequency Protection
The supply to consumers needs to be protected against frequencies outside a pre-set range and
to prevent the generator running at low speed. If the hydro is overloaded the turbine speed and
generator frequency will fall. Generator volts will fall and the hydro AVR will try to increase
voltage by increasing excitation. It is possible for the generator to get stuck at low speed
(around 45 Hz) and the rotor winding damaged by over excitation.
5.7 Stand Alone System - Synchronous generator with ELC
The diagram below shows the general arrangement for stand alone operation.
5.8 ELC Ballast Loads
Ballast loads must have a total capacity greater than the maximum output of the turbine /
generator. About 10-15% greater is ideal. Ballast loads must always be available – if they are
air heaters, then the thermostats must be removed. (This can contradict the Wiring
Regulations which state that a heater must have an over temperature cut out.) Heating
elements designed for water heating – for domestic use, or as part of a wet heating system -
can be ideal but a changeover switch with air heaters must be provided as a back up for when
the water is hot.
6 Permanent Magnet Generators
Permanent Magnet Generators (PMG) are made using permanent magnets on the rotor, rather
then windings. The advantage is that no rotor excitation is required and therefore the
construction is simple. The disadvantage is that there is no control of the rotor magnetism that
is to say the rotor excitation. The electrical output from the stator will be an A.C voltage. The
frequency will depend on the speed of rotation of the rotor.
Electronic LoadController Main Loads
Ballast Load
Air and / orwater heaters
Generator Contactor
Frequencyprotection

DR-S5-RevA.doc Section 5 Page 13
The voltage output will also depend on the speed of the rotor and the magnetic flux linkage
between the rotor and the stator.
PMG systems are often used for small battery charging systems where frequency is not
important. The output is rectified to D.C using a simple diode arrangement – a bridge
rectifier. PMGs can be efficient for small generators of a few hundred Watts to a few kW.
Often the air gap can be adjusted to control the flux linkage, and hence optimise output for a
given rotor speed.
David Roberts
MorbenHydro
November 2008