Embed Size (px)
Citation preview

Control of tumor growth distributions
through kinetic methods
Luigi Preziosi ∗ Giuseppe Toscani † Mattia Zanella ‡
Abstract
The mathematical modeling of tumor growth has a long history, and has been mathe-matically formulated in several different ways. Here we tackle the problem in the case of acontinuous distribution using mathematical tools from statistical physics. To this extent, weintroduce a novel kinetic model of growth which highlights the role of microscopic transitionsin determining a variety of equilibrium distributions. At variance with other approaches, themesoscopic description in terms of elementary interactions allows to design precise microscopicfeedback control therapies, able to influence the natural tumor growth and to mitigate therisk factors involved in big sized tumors. We further show that under a suitable scaling boththe free and controlled growth models correspond to Fokker–Planck type equations for thegrowth distribution with variable coefficients of diffusion and drift, whose steady solutions inthe free case are given by a class of generalized Gamma densities which can be characterizedby fat tails. In this scaling the feedback control produces an explicit modification of the driftoperator, which is shown to strongly modify the emerging distribution for the tumor size.In particular, the size distributions in presence of therapies manifest slim tails in all growthmodels, which corresponds to a marked mitigation of the risk factors. Numerical resultsconfirming the theoretical analysis are also presented.
Keywords: kinetic modelling; tumor growth; control
Mathematics Subject Classification: 35Q20; 35Q92; 35Q93
Contents
1 Introduction 2
2 Kinetic modeling of tumor growth 42.1 The kinetic description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Transition functions and elementary growth . . . . . . . . . . . . . . . . . . . . . . 72.3 Relevant cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4 Steady states . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 The controlled model 123.1 Additive control and equilibrium distribution . . . . . . . . . . . . . . . . . . . . . 143.2 Multiplicative control and equilibrium distribution . . . . . . . . . . . . . . . . . . 17
A Modelling tumor growth by ODEs 19
B Mean-field approaches for tumour growth containment 20
∗Department of Mathematical Science “G. L. Lagrange”, Politecnico di Torino, [email protected]†Department of Mathematics “F. Casorati”, University of Pavia, and The Institute for Applied Mathematics
and Information Technologies of CNR, Pavia, Italy. [email protected]‡Department of Mathematics “F. Casorati”, University of Pavia, Italy. [email protected]
1

1 Introduction
Since the early years of cancer research one of the basic questions addressed by scientists aimedat the identification of the growth law followed by tumors. The natural related purpose was theneed of using it to model the effect of cancer treatment and optimize therapy.
The easiest but still most used way to do that is to model growth by an ODE, usually offirst order. According to the right hand side, they are named after Malthus (i.e., the exponentialgrowth law), Verhulst (i.e., logistic growth law), Gompertz, Richards, von Bertalanffy, West, andso on. In particular, West et al. [61] gave a new insight to von Bertalanffy’s growth model startingfrom an original viewpoint. The parameters of the model are then optimized to fit the availableexperimental data in absence and presence of therapies. Due to the need of fitting the same data,they mostly give rise to a similar sigmoidal behaviour characterized by an asymptotic tendencyto an equilibrium related to the presence of a carrying capacity. The literature on the subjectis huge. So, for more information we refer to the recent review papers [21, 49, 51] and volumes[52, 63].
The process of parameter identification is affected by many sources of uncertainty stemmingout at different and independent levels of observation. To name a few, the first one consistsin the fact that the evaluation of the number of cells in a tumor is obtained using only partialinformation, e.g., approximating the tumor as an ellipsoid on the basis of the maximum and theminimum dimension measured ex-vivo (the middle axis of the ellipsoid is then approximated asthe mean of the measurements above), or obtained by two-dimensional in-vivo images assumingthat the observed section is the one containing the longest and shortest axis of the ellipsoid. Thesecond one regards the presence within the same body of many metastasis of different sizes growingin different environmental conditions. The third regards the fact that in a cohort of individuals,from nude mice used in experiments up to humans, the evolution is not the same because in eachhost the response of the body is different.
So, in spite of the apparent simplicity of the question, at present there is no general consensuson the type of growth law that is better to be used to fit data, with stochasticity playing a rolethat is often overwhelming with respect to the difference among the evolutions predicted by thedifferent models. In addition, the relation between the therapeutic action operating at the cellularlevel and the macroscopic parameter, e.g. the carrying capacity, is not immediate. On the otherhand, regardless of the exact fitting of the growth law, as stated for instance in [35], one of thetherapeutic goals in oncology is to control tumor growth and to reduce the probabilities of havingtumors growing to sizes that are too large to be physiologically or therapeutically controllable, orthat are harmful to the human body.
In order to accomplish this task, rather than modelling the tumor with a stochastic adaptationof the ODE growth models, we present here a novel kinetic approach, which aims to describe thegrowth of tumor cells in terms of the evolution of a distribution function whose temporal variationis the result of transitions occurring at the cellular level that lead to an increase or decrease intumor size, related to growth and death processes. The mathematical description proposed hereis based on a Boltzmann-type model where the elementary variations describing the number ofcancer cells are determined by a transition function which takes environmental cues and randomfluctuations into account. Under a suitable limit procedure, different choices of parameters in thetransition probability will characterize the equilibrium distribution.
The notion of growth in random environment has been formulated before in the framework ofstochastic birth and death processes by several Authors (see, for instance, [42, 47, 55] and referencestherein) to take into account of environmental fluctuations. In this framework, a stochastic modelof tumor growth was introduced by [2].
Application of tools from nonlinear statistical physics to describe biological phenomena involv-ing a huge number of entities represents one of the major challenges in contemporary mathematicalmodeling [1, 9, 10, 11, 46]. A consistent part of these applications makes a substantial use of meth-ods borrowed from kinetic theory of rarefied gases, which, starting from a mesoscopic descriptionof microscopic cells interactions, leads to construct master equations of Boltzmann type, usuallyreferred to as kinetic equations, able to drive the system towards universal statistical profiles.
2

An important example of emergent behavior is concerned with the building of tumors by cancercells and their migration through the tissues [10, 22, 29, 39]. Another example to consider in thiscontext is the classical Luria–Delbruck mutation problem treated by statistical methods [33, 57].In multicellular organisms, these two examples are closely related, since the connection betweenmutagenesis and carcinogenesis is broadly accepted (see, for instance, [16, 17, 34]). Furthermore,the Luria–Delbruck distribution plays an important role in the study of cancer, because tumorprogression depends on how heritable changes (mutations) accumulate in cell lineages. While thebasic entities in these examples differ from the physical particles in that they already have anintermediate complexity, for some specific phenomena, like the statistical growth of mutated cells,one can reasonably assume that the statistical behavior of the system is mainly related to thepeculiar way entities interact and not to their internal complex structure.
From our point of view, the most important output of using a kinetic model is to have anequilibrium distribution stemming from stochastic interactions occurring at the microscopic level,i.e. the cellular level. In particular, the distribution function will give the probability of havingtumours of size bigger than a given alerting size. Most importantly, it will be shown that, indifferent regimes of parameters of the general transition law, the emerging equilibrium distributionof the Boltzmann-type model shows a radically heterogeneous behavior in terms of the decay ofthe tails. In details, transitions laws that in a suitable limit are related to logistic-type growthsare associated to a generalized Gamma density function which is characterized by slim tail, i.e.by exponential decay. On the other hand, transitions laws that in a suitable limit are relatedto von Bertalanffy-type growths are associated to Amoroso-type distributions that are rathercharacterized by fat tail, i.e. by polynomial decay. The border case between the two distributionsleads to lognormal-type equilibria which exhibits slim tail, but with a possible dramatic increase ofhigher moments. From a statistical physics point of view, it is worth to remark that in the contextof tumor growth the dynamics leading to fat-tailed distributions imply the formation of big sizedtumors with high probability. Therefore, the distributions with fat tails can be associated to anincreased risk for the human body.
For this reason, once characterized the emerging distributions of the mentioned growth dy-namics, we concentrate on implementable therapeutical control strategies so that fat tails can betransformed in thin tails which means mitigating the risk of having big tumors. The control isdetermined analytically for any growth law. The control of emerging phenomena described bykinetic models or mean field theories is relatively recent [3, 5, 6, 8, 26, 27]. In particular, theproposed approach can be derived from a model predictive control (MPC) strategy which is basedon determining the control by optimising a given cost functional over a finite time horizon whichrecedes as time evolves [12, 53]. Assuming that the the minimisation horizon coincides with theduration of a single transition, we obtain a feedback solution to the control problem that can beimplemented efficiently in the Boltzmann-type kinetic model to observe its aggregate effects. It iswell known that MPC leads typically to suboptimal controls. Nevertheless, performance boundsare computable to guarantee the consistency of the MPC approximation in a kinetic framework[23, 30].
In more detail, the paper is organized as follows. The kinetic model for tumor growth ispresented in Section 2 where we introduce elementary variations of the number of cancer cellsdepending on a transition function determining the deterministic variations of the tumors’ size,and on random fluctuations. In suitable regimes we will obtain a classification of equilibriumdistributions corresponding to the introduced growth models, some of them exhibiting fat tails.The controlled model is presented in Section 3 and the emerging slim tailed distributions arecomputed for two possible therapeutical strategies. Finally, we summarise the highlights of thework and draw some conclusions. In Appendix A-B we present a brief review of microscopic andmean-field models for tumour growth.
3

2 Kinetic modeling of tumor growth
2.1 The kinetic description
As recalled in Section 1, tools from statistical physics are widely used to to describe biologicalphenomena involving a huge number of entities. In more details, we aim to model the statisticalgrowth of metastatic tumors in a population of patients or animals by means of the approach ofkinetic theory of multi-agent systems [45]. The leading idea of kinetic theory is to express thedynamics of the distribution of a certain phenomenon in terms of the microscopic process rulingits elementary changes. In the case under investigation, the phenomenon to be studied is thegrowth process of cancer cells, which we assume to be measured by a variable x representing thenumber of diseased cells which varies with continuity in R+. In other words, if X(t) denotesthe random variable expressing the number of cancer cells at time t ≥ 0, subject to the initialcondition X(0) = 1, f(x, t) is the probability density associated to the process X(t) such thatf(x, t)dx is the fraction of tumours which, at time t ≥ 0 are characterized by size between x andx+ dx. In recent years mean-field approaches have been developed in the field, we summarise themain ideas in Appendix B.
Following the well-consolidated approach developed in last decade [18, 40, 45] in the contextof interacting systems, the study of the time evolution of the probability density f(x, t) of cancercells, together with a reasonable explanation of the growth process induced by this distribution,can be achieved by means of kinetic models. Then, the knowledge of f(x, t) allows to computethe evolution of aggregate quantities of interest. In particular, since∫
R+
f(x, t) dx = 1,
for any given smooth function ϕ(x) (the observable), the quantity∫R+
ϕ(x)f(x, t) dx.
provides the evolution of an observable quantity. Important observable quantities are the principalmoments of the density, ϕ(x) = xn, n ≥ 1, and the characteristic function χA(x) of an intervalA ⊆ R+, whose evolution quantifies the percentage of cancers with a number of cells, x ∈ A attime t ≥ 0. For instance, if ϕ(x) = x one has the evolution of the mean size of tumours.
In agreement with the classical kinetic theory of rarefied gases, which aims at describing thedynamics of a huge number of particles, we assume that the evolution in time of the density fis due to repeated microscopic interactions which modify the size x of the tumor. In the sequel,let xL denote the mean number of cells that can be reached with nutrients in the type of tumorunder consideration.
For any given value x of cancer cells, we model the elementary variation x→ x′ as follows
x′ = x+ Φε(x/xL)x+ xηε, (1)
where xL is the characteristic tumour size, e.g. the carrying capacity. Thus, in a single transitionthe tumor’s size x can be modified by two different mechanisms, expressed in mathematical termsby two multiplicative terms, both parameterized by a small positive parameter ε� 1, quantifyingthe intensity of the interaction itself:
i) the transition function Φε(·) characterizes the small deterministic variations of the tumors’size, as a function of the quotient x/xL, due to environmental cues.
ii) the random variable ηε characterizes the fluctuations due to unknown factors. The usualchoice is to consider that the random variable ηε is of zero mean and variance of the orderof ε, expressed by 〈ηε〉 = 0, 〈η2ε 〉 = εσ2.
4

Starting from the elementary interaction (1), and resorting to classical kinetic theory [45], the time-evolution of the statistical distribution f(x, t) of the number of cancer cells can be described bya kinetic master equation. Indeed, the elementary transition process (1) induces a time variationof the density f(x, t) which is quantified by a linear Boltzmann-type operator. The correspondingkinetic equation is fruitfully written in weak form [13, 45]. The weak form corresponds to say thatthe solution f(x, t) satisfies, for all smooth functions ϕ(x) determining observable quantities
d
dt
∫R+
ϕ(x)f(x, t)dx =
⟨∫R+
B(x)(ϕ(x′)− ϕ(x))f(x, t)dx
⟩, (2)
where with 〈·〉 we denoted the expectation with respect to the random parameter ηε introducedin (1). In (2) the function B(·) is a kernel characterizing the frequency of the elementary growthtransitions in presence of tumour cells of size x.
The right-hand side of equation (2) represents the variation of the mean value of the observablequantity ϕ(·) consequent to growth transitions that, according to (1), modify the number of cancercells from from the pre-transition value x to the post-transition value x′.
Letting ϕ(x) = 1 in (2) we obtain
d
dt
∫R+
f(x, t) dx = 0,
hence, the introduced kinetic model, for any B(·), is such that∫R+
f(x, t) dx =
∫R+
f(x, t = 0) dx.
In reason of this we notice that the mapping x 7→ f(x, t) as a probability density function onR+ for all time t ≥ 0 is compatible with this property of equation (2). At difference with thissimple case, the precise computations of the evolution of higher moments, which correspond tothe choice ϕ(x) = xn, with 1 ≤ n ∈ N, appears cumbersome, and in any case impossible to expressanalytically. For this reason, it is fruitful to introduce into the integral transition operator in (2)some simplifications, which consist first in choosing a unitary kernel, B(x) ≡ constant, and secondin considering a suitable scaling for the model parameters.
It is worth to remark that the choice of a frequency kernel B(·) independent of the number oftumor cells, meaning that the frequencies of growth transitions do not depend on the actual numberof tumour cells, does not modify the features of the equilibrium configuration [19]. Therefore, evenif this choice may appear simplistic for modelling purposes, it does not influence the forthcominganalysis. We leave to future works the detailed study of effects of variable kernels on the dynamicsof the distribution f .
Furthermore, we will adopt the so-called quasi-invariant scaling for the introduced transitionfunction, meaning that the transitions of the proposed model can be considered arbitrarily small.This is expressed by assuming that Φε(·) is of the order of ε, and that
limε→0+
Φε(x/xL)
ε= Φ(x/xL). (3)
The main idea behind the quasi-invariant scaling is to fix, for a given choice of ε � 1 in (1) aε-dependent value of the frequency B balancing the smallness of the single transition by increasingits frequency and to obtain, in correspondence to any observable quantity ϕ(·), a non vanishingvariation of its mean value even in the limit ε→ 0. As shown in [18], where the computations arepresented in full details, the right correction for the kernel is to multiply it by 1/ε. An analogouseffect is obtained by introducing the time scale τ = εt such that in correspondence of ε → 0+
we consider the large time behavior of the system at time t → +∞, meaning that since thecontribution of the single transition is small, we need to wait enough time to observe changesas ε → 0+. It is worth to mention that the quasi-invariant scaling overrides the role of grazinginteractions [45, 56, 60].
5

Hence, let us fix into (2) the kernel B = 1/ε. Then, f satisfies the equation
d
dt
∫R+
ϕ(x)f(x, t)dx =1
ε
⟨∫R+
(ϕ(x′)− ϕ(x))f(x, t)dx
⟩. (4)
Since if ε � 1, the difference x′ − x is small, and assuming ϕ sufficiently smooth and rapidlydecaying at infinity, we can perform the following Taylor expansion
ϕ(x′)− ϕ(x) = (x′ − x)∂xϕ(x) +1
2(x′ − x)2∂2xϕ(x) +
1
6(x′ − x)3∂3xϕ(x),
being x ∈ (min{x, x′},max{x, x′}). Writing x′ − x = Φε(x/xL)x+ xηε from (1) and plugging theabove expansion in (4) we have
d
dt
∫R+
ϕ(x)f(x, t)dx
=1
ε
[∫R+
Φε(x/xL)x∂xϕ(x)f(x, t)dx+σ2ε
2
∫R+
∂2xϕ(x)x2f(x, t)dx
]+Rϕ(f)(x, t),
(5)
where Rϕ(f) is the remainder
Rϕ(f)(x, t) =1
2ε
∫R+
∂2xϕ(x) (Φε(x/xL)x)2f(x, t) dx
+1
6ε
⟨∫R+
∂3xϕ(x) (Φε(x/xL)x+ xηε)3f(x, t)dx
⟩.
By assumption, ϕ and its derivatives are bounded in R+ and rapidly decaying at infinity. Further,if ηε has bounded moment of order three, namely 〈|η|3〉 < +∞, using the bound (3) we can easilyargue that in the limit ε→ 0+ we have
|Rϕ(f)| → 0,
Hence, in the limit ε→ 0+ equation (5) converges to
d
dt
∫R+
ϕ(x)f(x, t)dx =
∫R+
Φ
(x
xL
)xf(x, t)∂xϕ(x)dx+
σ2
2
∫R+
x2f(x, t)∂2xϕ(x)dx.
If for any given t ≥ 0 the limit density f = f(x, t) satisfies, at the point x = 0, the no-fluxboundary condition
−Φ
(x
xL
)xf(x, t) +
σ2
2∂x(x2f(x, t))
∣∣∣∣∣x=0
= 0,
integrating by parts we conclude that it solves the kinetic equation
d
dt
∫R+
ϕ(x)f(x, t) dx =
∫R+
ϕ(x)∂x
[−Φ
(x
xL
)xf(x, t) +
σ2
2∂x(x2f(x, t))
]dx, (6)
that corresponds to the weak form of a Fokker-Planck equation (in divergence form)
∂tf(x, t) = ∂x
[−Φ
(x
xL
)xf(x, t) +
σ2
2∂x(x2f(x, t))
], (7)
with variable coefficient of diffusion, and drift term characterized by the limit function Φ(·) de-fined in (3). Both the Boltzmann-type equation (2) and the Fokker–Planck type equation (7)describe the evolution in time of the statistical distribution of tumor growth consequent to themicroscopic interaction (1). These two kinetic equations, which correspond to different intensitiesof interactions, allow to obtain an exhaustive description of both the evolution and the stationarystatistical states. In particular, the Boltzmann type description will be at the basis of the studyof optimal control strategies of the statistical growth.
6

0 0.5 1 1.5 2
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2
-0.2
0
0.2
0.4
0.6
0.8
1
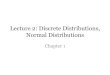
Figure 1: Transition function Φεδ in (11) for ε = 1. In both cases we considered the choiceµ = λ = 1
2 . Hence, according to (11) we have Φεδ ∈ (−1/3, 1). We can observe the asymmetryaround the value s = x/xL = 1 described by the introduced transition functions in the case δ > 0(left) and δ < 0 (right). It is evident how Φεδ for δ > 0 are increasing and convex for values s ≤ 1whereas, if δ < 0 the transition function Φεδ become concave in an interval [0, s], s < 1 and thenconvex.
2.2 Transition functions and elementary growth
In this Section, we will detail the elementary interaction (1) by introducing a class of transitionfunctions Φε(·), which can be easily linked to different growth models. We point the interestedreader to Appendix A for an insight on microscopic modeling of tumor growth, and for a betterunderstanding of the forthcoming analysis. The function Φε(·) will be chosen in a way to properlycharacterize the elementary mechanism of growth of the tumor under consideration. Clearly, thefunction Φε(·) has to be positive when x < xL, thus producing, in absence of random fluctuations,a growth of the value x, and decreasing on this interval, in agreement with the fact that tumourgrowth slows down for values of x in proximity of the carrying capacity. Moreover, if to avoidunnecessary mathematical cut-off assumptions, we extend the interval of possible values assumedby the function Φε(·) to the whole of R+, the function on the interval x > xL has to be negativeand slowly increasing, thus expressing an almost negligible possibility for the number x of tumorcells to cross the carrying capacity value xL.
A transition function with these characteristics is given by
Φε0(s) = µ1− sε
(1 + λ)sε + 1− λ, s ∈ R+, (8)
where 0 < ε � 1, 0 < µ < 1 and 0 ≤ λ < 1 are given non negative constants. In agreement withthe previous observations, for any given value of these constants, the function Φε0(s) is decreasingand convex on R+, and equal to zero at the reference point s = 1, where x = xL. Moreover ittakes values in the interval
− µ
1 + λ≤ Φεδ(s) ≤
µ
1− λ, (9)
that does not depend on the parameter ε. Consequently, the values of µ and λ characterize themaximal amount of birth and death of tumor cells in a single interaction. Note that the lowerbound in (9) guarantees that the deterministic part of the post-interaction value remains positive,since µ/(1 + λ) < 1.
It is important to remark that the function (8) is characterized by a certain asymmetry withrespect to the value s = 1, namely to the point in which the number of cancer cell reaches thecarrying capacity, and Φε0 vanishes. Indeed, for 0 < ∆s < 1 it holds
Φε0(1−∆s) > −Φε0(1 + ∆s). (10)
7

This inequality translates at the mathematical level a fundamental property: it is always easierto reach the value s = 1 starting from below, than to approach it from above (cf. the left case ofFig. 1).
Exactly in reason of inequality (10), the function Φε0(·) has been recently considered in somerecent work devoted to understand the reasons behind the formation of certain statistical distri-butions in human phenomena [24, 25]. In this case, the shape of the transition function has beendesigned to satisfy the main requirements of the prospect theory of Kahneman and Twersky [31],concerned with the description of decision under risk.
The transition function (8) is a particular case of the general class of transition functions Φε(·),defined by
Φε(s) = Φεδ(s) = µ1− eε(sδ−1)/δ
(1 + λ)eε(sδ−1)/δ + 1− λ, (11)
where the constant −1 ≤ δ ≤ 1, while 0 < µ < 1, and 0 ≤ λ < 1. Indeed, the limit case δ → 0corresponds to the function (8).
Similarly to the case of the transition function defined in (8), it can be easily verified that, forevery value of the parameters δ, λ and µ, the function Φε(s) is decreasing in s, equal to zero atthe reference point s = 1, and satisfies the bounds
− µ
1 + λ≤ Φεδ(s) ≤ µ
1− e−ε/δ
(1 + λ)e−ε/δ + 1− λ, if δ > 0, (12)
while
µ1− e−ε/δ
(1 + λ)e−ε/δ + 1− λ≤ Φεδ(s) ≤
µ
1− λ, if δ < 0. (13)
Unlike the transition function (8), while the parameters λ and µ, are linked to the maximalamounts of the deterministic variations of the number x in a single interaction, now the upperbound in (12) and the lower bound in (13) also depend on the parameter ε. However, in all casesΦεδ(s) still satisfies the bounds (9).
A further property of the transition functions (11) is related to their dependence on the variableε. With the notation z = z(s) = (sδ − 1)/δ we have
∂Φεδ(s)
∂ε= −2µz
1[(1 + λ)e(εz)/2 + (1− λ)e−(εz)/2
]2 . (14)
Now, observing that the function
h(y) =[(1− µ)ey/2 + (1 + µ)e−y/2
]2has a maximum in the point
y = log1− λ1 + λ
,
whereh(y) = 4(1− λ2),
we can easily determine the bound∣∣∣∣∂Φεδ(s)
∂ε
∣∣∣∣ ≤ µ
1− λ2
∣∣∣∣sδ − 1
δ
∣∣∣∣ .This implies that, for a given x > 0
Φεδ
(x
xL
)x ≤ ε µ
δ(1− λ2)
∣∣∣∣∣(x
xL
)δ− 1
∣∣∣∣∣ x, (15)
8

which clarifies the way in which the parameter ε tunes the growth of the deterministic part of thevariation (1).
While the whole class of transition functions (11) satisfies the same type of asymmetry aroundthe reference value s = 1, the consequent behavior is typical of very different phenomena. Learn-ing from the application of the transition functions (11) in the field of kinetic theory of socialphenomena, values δ > 0 are typical of phenomena in which the initial growth is statisticallyrelevant. Indeed, values δ > 0 have been introduced to model the statistical distribution of alco-hol consumption [14], and, more in general, the statistical distribution of addiction phenomena[58]. On the contrary, the case δ < 0 is typical of phenomena in which the initial growth is notstatistically relevant, and was recently considered in [15] to understand the formation of a socialelite in consequence of the social climbing activity.
Precisely, in absence of fluctuations, the elementary interaction (1) produces a growth of thevalue of x when x < xL for all values of the parameter δ. However, in terms of δ, the transitionfunctions (11) do not behave in the same way in the region x < xL, that corresponds to the interval0 ≤ s ≤ 1. As remarked in [15] the transition functions (11) with index δ > 0 are increasing andconvex for s ≤ 1, while the transition functions with index δ < 0 are concave in an interval[0, s), with s < 1, and then convex, see Figure 1. Hence, in a certain sub-interval of [0, s) thegrowth induced by the transition functions with δ < 0 is lower than the growth induced by thetransition functions with δ > 0. For this reason, the transition functions with index δ < 0 seemmore adapted to describe the growth of cancer cells, since the presence of the inflection point inthe region x < xL reflects the tendency of the body to react to the growth of cancer cells at leastwhen their number is below a certain value.
A second fact which leads to prefer the mechanism of growth corresponding to a transitionfunction with δ < 0 is related to the behavior of Φεδ(s) in the interval s > 1, namely in the intervalwhere the number of cancer cells is above the reference value xL. In this interval the transitionfunctions are negative and satisfy the lower bound
Φεδ(s) ≥ µ1− e−ε/δ
(1 + λ)e−ε/δ + 1− λ,
Hence, in the interval x > xL, the transition functions with δ < 0 take values in a small intervalof size approximately ε/|δ|, which corresponds, since ε � 1, to an almost negligible variation ofthe deterministic part of the size, and consequently to an effective stabilization of the size aroundthe value xL. Clearly, this property does not hold when δ > 0, since in this case the lower boundin (12) does not depend on ε.
Once the deterministic mechanism of growth has been quantified in terms of the transitionfunctions (11), the upper bound in (9) allows to compute the lower bound relative to the randomfluctuations which can be consistently inserted into the elementary interaction (1) to preserve thepositivity of the variable x. Indeed x′ ≥ 0 independently of ε if
ηε ≥ −1 +µ
1 + λ. (16)
It is important to remark that the whole class of transition functions defined in (11) satisfycondition (3). Indeed, in the limit ε→ 0+ the transition function satisfies
Φε(s) ≈ µε (sδ − 1)/δ
(1 + λ)ε(1− sδ)/δ + 2,
which implies
limε→0+
Φε(s)
ε=
µ
2δ(1− sδ) (17)
Hence, if in the elementary interaction we consider a transition function in the class (11), for anygiven −1 ≤ δ ≤ 1 the kinetic equation (2) in the quasi-invariant limit is given by the Fokker–Planckequation
∂tf(x, t) = ∂x
[µ
2δ
((x
xL
)δ− 1
)xf(x, t) +
σ2
2∂x(x2f(x, t))
]. (18)
9

We notice that the drift term in (18) takes the form of classical growth laws recalled for theconvenience of the reader in Appendix A. For instance, δ = 1 corresponds to logistic growth,δ → 0 to Gompertzian growth, and δ < 0 to von Bertalanffy-type growth law.
2.3 Relevant cases
The Fokker–Planck equation (18) retains memory of the kinetic description through the relevantparameters of the transition function (11), namely the parameters δ and µ, and through the shapeof the drift term, as given by (17). However, the parameter λ is lost in the limit. Also, the detailsof the variable ηε are lost in the limit passage, so that the role of fluctuations is taken into accountonly through their variance, parameterized by σ. As we shall see, at difference with the others,the value of the parameter δ fully characterizes the shape of the steady state of equation (18).
A distinguished case is obtained by taking δ → 0 in Eq. (18). The resulting Fokker–Planckequation in this case is given by
∂tf(x, t) = ∂x
[µ
2log
x
xLxf(x, t) +
σ2
2∂x(x2f(x, t))
],
which is the equation considered in [2]. This allows to compare out next results on the controlledFokker–Planck equation with the results obtained in [2]. As usual for Fokker–Planck type equationsin divergence form, it is immediate to evaluate the explicit shape of its stationary distribution,and to clarify, resorting to this shape, the consequences of the different transition functions on thestatistical tumor growth.
2.4 Steady states
Let γ = µ/σ2, and suppose that γ > δ. Note that this condition is restrictive only when δ > 0.Then, the asymptotic distribution f∞(x) satisfies the first order differential equation
∂x(x2f(x, t)) +γ
δ
((x
xL
)δ− 1
)xf(x, t) = 0,
whose solution is given by
f∞(x) = f∞(xL)
(x
xL
)γ/δ−2exp
{− γ
δ2
((x
xL
)δ− 1
)}, (19)
see also [14]. It seems worthwhile to remark that the obtained equilibrium distribution (19) lieson wider classes of probability distributions depending on the sign of the parameter δ.
The case δ > 0. Let us fix the mass of the steady state (19) equal to one. If δ > 0, theconsequent probability density is a generalized Gamma. These distributions are characterized interms of a shape κ > 0, a scale parameter θ > 0, and the exponent δ > 0. Therefore (19) can beparametrized in terms of the introduced parameters as follows
fκ,δ,θ∞ (x) =δ
θκΓ (κ/δ)xκ−1 exp
{−(xθ
)δ}, (20)
where shape and the scale parameter of the equilibrium state are given by
κ =γ
δ− 1, θ = xL
(δ2
γ
)1/δ
.
We point the interested reader to [37, 54] for further details.
10

0 1 2 3 4 50
1
2
3
4
5
6
7
10-1
100
101
10-6
10-4
10-2
100
0 1 2 3 4 50
0.5
1
1.5
2
10-1
100
10-4
10-2
100
102
0 1 2 3 4 50
0.5
1
1.5
2
10-1
100
101
10-2
10-1
100
101
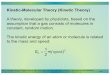
Figure 2: Comparison of the analytical steady states f∞ (full and dashed curves) given in (20)-(21)-(23) (from top to bottom) with the numerical solution of the Boltzmann-type equation (2)for large times in the quasi-invariant regime for ε� 1 (marked curves). We considered δ = 1 (toprow), δ ≈ 0 (middle row), and δ = −1 (bottom row). It is easily observed how we consistentlycatch the obtained equilibrium distribution in all regimes. In the figures on the right we highlightthe tail behavior plotting the distribution in loglog scale for all the considered regimes. In all thereported numerical results we considered λ = µ = 0.1, 0.9, xL = 1, and σ2 = 0.2.
11

Remark 2.1. The logistic growth (40) corresponds to the value δ = 1. In this case, the steadystate of the corresponding Fokker–Planck equation is a Gamma density function, with exponentκ = γ − 1 and scale parameter θ = xL/γ. The condition κ > 0 is satisfied if µ > σ2, that iswhen the elementary transition (1) is characterized by random fluctuations that are small withrespect to the deterministic part. The values of δ < 1 correspond to generalized logistic growthlaws, as given by (38). In all cases, the consequent generalized Gamma densities decay to zeroexponentially as x→ +∞.
The case δ < 0. In the case of negative δ’s, corresponding to the introduced von Bertalanffygrowth (41), we notice a different behavior for large values of x. Indeed, the equilibrium distribu-tion (19) is an Amoroso-type, or power law distribution [7]
fκ,|δ|,θ∞ (x) =|δ|
Γ (κ/|δ|)θκ
xκ+1exp
{−(θ
x
)|δ|}, (21)
which is characterized by a polynomial decay. The shape and the scale parameter of the equilibriumstate (19) are given by
κ =γ
|δ|+ 1, θ = xL
( γδ2
)1/|δ|. (22)
In reason of the polynomial decay of (21), the equilibrium density has moments bounded only oforder p < κ. The case δ = −1 corresponds to the inverse Gamma distribution. As documentedin [20, 41, 45] through an exhaustive list of references, power-law distributions occur in an ex-traordinarily diverse range of situations. In biology, power laws have been claimed to describe thedistributions of the connections of enzymes and metabolites in metabolic networks, the numberof interactions partners of a given protein, and other quantities [32, 36]. In the present context,these distributions, characterized by polynomially-decaying tails, indicate higher probabilities ofhaving tumors with a big size. Therefore, the paramount need of identifying therapeutical proto-cols aimed at reducing the probability of having big tumors translates from a statistical point ofview in dampening the mass of the tails.
The case δ → 0. The limit case δ → 0 corresponds to Gompertz growth (42). The equilibriumdensity is easily seen to be the lognormal equilibrium
f∞(x) =1√
2πγxexp
{− (log x− κ)2
2γ
}, (23)
where κ = log xL − γ. This border case still corresponds to a density function with slim tails.
In Figure 2 we represent the numerical approximation of the Boltzmann-type model (2) in thequasi-invariant regime through Direct Stochastic Monte Carlo (DSMC) methods, see [44, 45] foran introduction. In details, we considered the initial distribution
f(x, 0) =
{1 x ∈ [1, 2]
0 elsewhere,(24)
and N = 105 particles. Furthermore, we considered the following choice of parameters µ = 0.1, 0.9,xL = 1 and σ2 = 0.2. It can be easily observed how the reconstructed large time distribution fromthe Boltzmann model can be approximated with the steady state of the Fokker-Planck models,producing therefore the correct tails of the various equilibrium distributions.
3 The controlled model
In Section 2 we introduced and discussed a variety of kinetic models suitable to describe tumorgrowth. The main brick of this construction was the choice of the class of transition functions (11)
12

entering the elementary interaction (1), and characterizing the growth in terms of the parameterδ ranging from −1 to +1. In particular, it was shown that, for negative values of the parameter δ,corresponding to von Bertalanffy growth as explained in Appendix B, the resulting equilibrium inthe limit of grazing interactions is given by a probability density with polynomial tails, in the formof Amoroso distribution (21). In details, we studied how, for some values of the parameter δ, thekinetic modeling of Section 2 allows to obtain Fokker–Planck type equations previously consideredin the literature, even if derived in a different way. In this direction we mention the limit δ → 0 inthe introduced kinetic modeling, corresponding to Gompertz growth [2], which exhibits lognormalequilibria (23).
The new kinetic description allows to enlighten the effects of therapies by acting on the ele-mentary responses to environmental cues directly, to show how these therapies act on the resultingFokker–Planck equations, and ultimately to compare the results in [2] with the present ones. Inthis direction, we will consider a therapy like a control acting on the elementary transitions tominimize the growth.
To study the effect of therapies on the growth process we consider a constrained version of thetransition model (1) which depends on a control u representing the instantaneous correction dueto an external action. This control can be additive
x′ = x+ Φε(x/xL)x+ εx u+ xηε, (25)
and in this case the effect of u is to modify at best the growth in an additive way, or multiplicative
x′ = x+ uΦε(x/xL)x+ xηε, (26)
which implies a direct action on the transition function. The former will be discussed in Section3.1 and the latter in Section 3.2.
In both cases the control variable is given by a multiplicative coefficient of the variable x,meaning that the control acts similarly on single cells, so that the eventual control is proportionalto tumor size. Furthermore, we observe that a control of the form (25) induces an externalmodification of the death rate. On the other hand the multiplicative control of the form (26)modifies directly the dynamics acting on the balance between death and birth. Moreover, in theadditive control, the size of the controlled variable is tuned by the small parameter ε� 1.
The optimal control u∗ can be determined as the minimizer of a cost functional
u∗ = arg minu∈U
1
2J(x′, u), (27)
subject to the constraint (25). In (27) the minimum is taken on the space U of all admissiblecontrols. In the following we will consider a quadratic cost functional in the form
J(x′, u) =1
2
⟨(x′ − xd)2 + νεu
2⟩, (28)
being νε > 0 a penalization coefficient and xd > 0 is the desired tumors’ size that one would like toreach. According to (28), the cost increases quadratically with the distance to a desired size, thischoice mimics the fact that more efforts are needed to contain tumours with bigger size, i.e. cancersthat are detected too late. This could be different than zero allowing the existence of tumors witha controlled size. The presence in (28) of the mean operator 〈·〉 permits to obtain a control whichdoes not depend on the presence of the random fluctuations. The goal is to obtain a control whichminimizes the distance with respect to the desired size xd ∈ R+. The minimization of (27) canbe classically done resorting to a Lagrange multiplier approach in the present setting. It is worthto observe that other convex cost functionals may be considered leading often to problems whoseanalytical solution cannot be obtained explicitly. Therefore, in more general settings suitablenumerical methods should be developed, see e.g. [4].
13

3.1 Additive control and equilibrium distribution
We concentrate first on a dynamics embedded with an additive control strategy (25) seeking tominimize the cost functional (27). Hence, we consider the Lagrangian
L(u, x′) = J(x′, u) + α 〈x′ − x− Φε(x/xL)x− ε xu− xηε〉 ,
where α ∈ R is the Lagrange multiplier associated to the constraint (25). The optimality conditionsread {
∂uL(x′, u) = νεu− αε x = 0
∂x′L(x′, u) = 〈x′ − xd〉+ α = 0.
Eliminating the Lagrange multiplier yields the optimal value
u∗ = − ε x
νε + ε2x2(x− xd + Φε(x/xL)x) . (29)
Plugging the optimal value (29) into (25) gives the following optimal constrained interaction
x′∗ = x+νε
νε + ε2x2Φε(x/xL)x− ε2x2
νε + ε2x2(x− xd) + xηε. (30)
Note that for x ≤ xL the transition function Φε is nonnegative, so that the post-interaction valuex′∗ is nonnegative if the fluctuation variable ηε satisfies the condition
ηε ≥ −1 +ε2x2L
νε + ε2x2L.
In view of condition (16), this condition is satisfied for ε sufficiently small.In presence of the controlled interaction (30), one can consider as before the limit of grazing
interactions, provided all quantities in (30) scale in the right way with respect to ε. To this extent,it is enough to scale the penalization νε = εν, where ν > 0, to get
νενε + ε2x2
=ν
ν + εx2,
ε2x2
νε + ε2x2= ε
x2
ν + εx2. (31)
At this point, proceeding as in Section 2.1 with the new elementary interaction (30) we obtainthat the controlled kinetic model converges, in the grazing limit ε → 0 to a Fokker–Planck typeequation with a modified drift term, that takes into account the presence of the control. In termsof the controlled density fa(x, t), this equation reads
∂tfa(x, t) = ∂x
{[µ
2δ
((x
xL
)δ− 1
)x+
x2
ν(x− xd)
]fa(x, t) +
σ
2∂x(x2fa(x, t))
}.
We will refer here to the case in which δ < 0, which in the uncontrolled case leads to steady stateswith polynomial tails. Then, in presence of the additive control, the asymptotic distributionfa,∞(x) satisfies the first order differential equation
∂x(x2fa,∞(x, t)) +
[γ
|δ|
(1−
(xLx
)|δ|)x+
2x2
σν(x− xd)
]fa,∞(x, t) = 0,
where γ = µ/σ. The solution is given by
fa,∞(x) = C(xL, xd)(xLx
)γ/|δ|+2
exp
{− γ
δ2
((xLx
)|δ|− 1
)}exp
{− (x− xd)2
σν
}. (32)
In (32) the constant C(xL, xd) is chosen such as the mass of the density function equal to one.
14

0 1 2 3 4 50
1
2
3
4
5
6
7
10-1
100
10-4
10-2
100
102
0 1 2 3 4 50
1
2
3
4
5
6
7
10-1
100
10-4
10-2
100
102
Figure 3: Comparison of the analytical steady states (34) with the numerical large time solutionof the Boltzmann-type equation with additive constrained interaction (25) in the quasi-invariantregime for ε = 10−2 and ν = 10−1, 1 in the case λ = µ = 0.1 (top tow) and λ = µ = 0.9 (bottomrow). We considered xL = 1 and target state xd = 0.5. In the right column we report the obtaineddistributions in loglog scale to highlight the behavior of the tails. In red dotted we report theequilibrium distribution of the unconstrained case for µ = 0.1 (top row) and µ = 0.9 (bottomrow).
15

The steady state (32) can be rewritten as the product of two probability densities. The firstone is the solution of the uncontrolled Fokker–Planck equation (18), given by the Amoroso typedensity (21), with parameters κ and θ in (22). The second term has the form of the Gaussiandensity
N (xd, σν/2) =1√πσν
exp
{− (x− xd)2
σν
}, (33)
of mean value xd and variance σν/2. Clearly, since x in (33) ranges on the whole real line R,identity holds provided the product of the densities is multiplied by the characteristic function ofthe set x ≥ 0, we denote by I(x ≥ 0). Finally
fa,∞(x) = C(xL, xd, σ, ν) fκ,|δ|,θ∞ (x)N (xd, σν/2)I(x ≥ 0). (34)
In (34) the constant C(xL, xd, σ, ν) > 0 is such that the density fa,∞ is normalized to one. It isremarkable that, at variance with the uncontrolled case, the presence of the Gaussian density issuch that the controlled distribution possesses exponentially decaying tails at infinity. Moreover,for small values of the penalization variable ν, the mean value of the controlled case is close to thetarget value xd, and the equilibrium solution has a small variance. In other words, the controlledcase is such that the target value xd can substantially be reached.
In Figure 3 we compare the numerical solution of the Boltzmann-type model (4) for largetimes with additive constrained transitions (30) in the case ε = 10−2. In details, we consideredthe case δ = −1, the initial distribution (24) and the scaled penalization ν = 10−1, 100. Here,we supposed that the target size is xd = 1
2 whereas xL = 1. We can observe how the numericallarge time distribution is consistently described by the derived equilibrium distribution of theFokker-Planck model (32) for sufficiently small ε � 1. It is easily observed how for decreasingpenalizations the equilibrium distribution fa,∞ tends to concentrate around the target size xd withdecreasing variance coherently with what we obtained in (34). The effect of the control on thetails of the distribution is highlighted by direct comparison with the equilibrium distribution ofthe unconstrained case of the form (21).
Remark 3.1. We can observe how the introduced control needs to modify the growth term toinfluence the behavior of the tails of the emerging equilibrium distribution. Indeed, if we considera control that minimizes the cost (27)-(28) subject to the following dynamics
x′ = x+ Φε(x/xL)x+ εu+ xη,
performing similar computations to those made before, we obtain the following binary constrainedtransition
x′ = x+νε
ε2 + νεΦε(x/xL)x− ε2
ε2 + νε(x− xd) + xη.
Hence, we may proceed as explained in Section (2.1) to obtain in the regime ε� 1 and under thescaling (31) the Fokker-Planck equation
∂tfa(x, t) = ∂x
{[µ
2δ
((x
xL
)δ− 1
)x+
x− xdν
]fa(x, t) +
σ
2∂x(x2fa(x, t))
}
whose equilibrium distribution, in the case δ < 0 is given by
fa,∞(x) = C(xL, xd, σ, ν)(xLx
)γ/|δ|+2
exp
{− γ
δ2
((xLx
)|δ|− 1
)}exp
{−x− xd
σν
}.
Therefore, we may observe that action of the control is not capable to modify the tails of thedistribution.
16

3.2 Multiplicative control and equilibrium distribution
The multiplicative case (26) can be treated likewise. The Lagrangian is now
L(u, x′) = J(x′, u) + α 〈x′ − x− uΦε(x/xL)x− xηε〉 ,
with α the Lagrange multiplier. The optimality conditions in this case read{∂uL(x′, u) = νεu− αΦε(x/xL)x = 0
∂x′L(x′, u) = 〈x′ − xd〉+ α = 0.
These conditions yield the optimal control
u∗ = − Φε(x/xL)x
νε + (Φε(x/xL)x)2(x− xd). (35)
Now, plugging (35) into (26) we obtain the following optimal constrained microscopic interac-tion model
x′∗ = x− (Φε(x/xL)x)2
νε + (Φε(x/xL)x)2(x− xd) + xηε. (36)
Note that, at variance with the additive control case, in which the constrained interaction (30) isa balance between a growth term and a decrease term, the action of the control is such that onlya decrease is possible, apart from random fluctuations. We may consider, as in Section 3.1 , thelimit of grazing interactions, by choosing νε = εν, where ν > 0. Using (11) we obtain
(Φε(x/xL)x)2
νε+ (Φε(x/xL)x)2≈ x2
ν
[µ
2δ
((x
xL
)δ− 1
)]2Hence, in the limit ε→ 0+ we obtain the Fokker-Planck equation for the controlled density fm(x, t)in presence of a multiplicative control
∂tfm(x, t) = ∂x
x2ν[µ
2δ
((x
xL
)δ− 1
)]2(x− xd)fm(x, t) +
σ
2∂x(x2fm(x, t))
.
whose equilibrium distribution, for δ 6= −1 or δ 6= −1/2, takes the form
fm,∞(x) = C(xL, xd, σ, ν) x−2 exp
{− 2
σν
( µ2δ
)2Aδ(x)
}.
where
Aδ(x) = x
((x
2δ + 2− xd
2δ + 1
)(x
xL
)2δ
+
(2xdδ + 1
− 2x
δ + 2
)(x
xL
)δ+x
2− xd
),
and C(xL, xd, σ, ν) > 0 is a normalization constant. It is worth to observe that in the case δ = −1we obtain the following equilibrium distribution
fm,∞(x) = C(xL, xd, σ, ν)x−2−α exp
{− µ2
2σν
[−(2xL + xd)x+
x2
2+x2Lxdx
]},
with α =µ2
2σν(x2L + 2xL xd), which can be rewritten as follows
fm,∞(x) = C(xL, xd, σ, ν)x−2−αN(
2xL + xd,2σν
µ2
)χ(x ≥ 0)×
× exp
{− µ2
2σν
[− (2x2L + xd)
2
2+x2Lxdx
]},
17

0 1 2 3 4 50
1
2
3
4
5
10-1
100
10-4
10-2
100
102
104
0 20 40 60 80 100
0.4
0.6
0.8
1
1.2
1.4
1.6
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Figure 4: Top row: comparison of the analytical steady states (34) with the numerical solution ofthe Boltzmann-type equation for large times with multiplicative constrained interaction (36) in thequasi-invariant regime for ε = 10−2 in the cases ν = 10−1, 10−3. Bottom row: evolution of U(t),V (t) defined in (37) for several values of the penalization coefficient. We considered λ = µ = 0.1,σ = 0.2, xL = 1 and target state xd = 0.5. In red dotted we report the equilibrium distribution ofthe unconstrained case.
18

which exhibits therefore slim tails.In the top row of Figure 4 we compare the numerical solution of the Boltzmann-type model (4)
for large times with multiplicative control (26) in the quasi-invariant regime ε = 10−2 and δ = −1,µ = 0.1. We considered several values of the penalization ν = 10−1, 10−2 and a target size xd = 1
2whereas xL = 1. As before, the large time distribution of the Boltzmann model is consistentlyapproximated by the ones of the Fokker-Planck regime for ε � 1. The action of the control iscapable to modify the tails of the emerging distribution as highlighted by direct comparison withthe unconstrained case.
In order to better understand the effects of the multiplicative control we can look at theevolution of the mean size and of its variance, i.e. to the quantities
U(t) =
∫ +∞
0
xf(x, t)dx, V (t) =
∫ +∞
0
(x− U(t))2f(x, t)dx. (37)
In the bottom row of Figure 4 we report the evolution of U(t) and V (t) for several choices ofν > 0. We can observe how the control is capable to drive the expected size towards xd and toreduce the variance for small values of the penalization.
Conclusion
In this paper we started by presenting a kinetic model for the distribution of tumor size and therelated Fokker-Planck equation that yields under suitable ranges of parameters the most commongrowth laws used to characterize tumor growth. We then showed that the emerging equilibriumdistributions of the kinetic model correspond to radically heterogeneous behaviors in terms of thedecay of the tails, according to the parameters of the model giving rise to the different growthlaws. For instance, logistic-type growths are associated to a generalized Gamma density functioncharacterized by slim tail with exponential decay. Gompertzian growth is associates to lognormal-type equilibria which exhibit slim tails as well. On the other hand, von Bertalanffy-type growthsare associated to Amoroso-type distributions characterized by fat tails with polynomial decay.
Now, from the pathological point of view fat-tailed distributions are related to a higher prob-ability of finding large tumors with respect to thin-tailed distributions. So, from a therapeuticalpoint of view it would be desirable to control at least the distribution tails. With this aim in mindwe proved that optimal controls proportional to the tumor size acting either in an additive wayor in a multiplicative way on the size transition function Φε are able to do that.
Extension of the proposed modelling approach to include the effects of the environment on thetransition function and the possibility to consider more parsimonious controls are actually understudy and will be discussed in a future work.
A Modelling tumor growth by ODEs
In the biomathematical literature a variety of models for tumor growth have been proposed. Thelist is quite long and the interested reader can have an almost complete picture about themby reading some exhaustive review papers [21, 43, 50, 48, 61, 62, 59]. These essential growthmodels aim to catch the main features of the dynamics, often allowing to determine an analyticalexpression of the evolution of the total number of cells in a tumor. In order to draw a comparisonbetween the classical and the present approaches, in the following we will briefly recall the mainfeatures of a large class of growth models, for future reference.
Most of the well-know models present in the literature can be described in a unified version bythe class of first-order differential equations of Bernoulli type for the number x(t) of tumor cells
x(t) =α
δx(t)
(1−
(x(t)
xL
)δ), (38)
19

parameterized by α > 0, δ ∈ [−1, 1], and the carrying capacity xL of the system. If δ 6= 0, (38)can be easily integrated to get the analytical solution
x(t) = xL
{[(xLx0
)δ− 1
]e−αt + 1
}−1/δ. (39)
describing the evolution of tumor cells starting from their initial number x0 at time t = 0 towardthe stable equilibrium represented by the carrying capacity xL.
Equation (38) includes a variety of well-known growths like the logistic, von Bertalanffy andGompertz growths. Each of them has been widely used to describe the evolution tumours’ size,see [38, 61, 62]. In fact, the logistic growth corresponds to fixing δ = 1 in (38) yielding
x(t) = αx
(1− x(t)
xL
), (40)
whose solution can be expressed in the form
x(t) =xL
1 +KxLe−αt,
with K = 1/x0 − 1/xL. This growth model converges exponentially at the rate α towards thecarrying capacity of the system xL, and it has been fruitfully employed in many applicationsin population dynamics. Other logistic-type growth models correspond to the positive values ofδ ∈ (0, 1).
In the context of biological processes other models seem to furnish a better explanation aboutreal data of tumor growth [28]. These growth models belong to the class (38), and are characterizedby negative values of the constant δ. The most known model in this range of the parameter is dueto von Bertalanffy, and it is usually written in the form
x(t) = px(t)a − qx(t), (41)
where 0 ≤ a < 1, and p, q > 0 are the rates of growth and size-proportional catabolism, respec-
tively. This model corresponds to the choice δ = a − 1 < 0, α = q(1 − a) and xL = (p/q)1/(1−a)
in (38). Substituting these values into (39), its solution
x(t) = xL
[1−
(1− p
qx0
1−a)e−q(1−a)t
] 11−a
,
converges exponentially fast at a rate q towards xL.Finally, the limit case δ → 0 in (38) corresponds to Gompertz growth. This growth is given as
the solution of the differential equation
x(t) = −αx(t) log
(x(t)
xL
), (42)
In (42) the constant α > 0 denotes the growth rate related to the proliferative ability of cells. Theexact solution of the Gompertz growth model can be easily found to be
x(t) = xL exp
{e−αt log
x0xL
}.
As in the previous cases limt→+∞ x(t) = xL exponentially.
B Mean-field approaches for tumour growth containment
In the following we will present a formal derivation of mean-field type equations. In this case theevolution of the distribution of tumors with a certain size is based on microscopic dynamics rulingthe drift.
20

The deterministic dynamics of growth driven by equation (38) is the starting point to obtainpartial differential equations able to describe the evolution of the density function f(x, t) which,at a certain time t = t0 measures the statistics of the size x ≥ 0 of tumors which are growingaccording to (38) in a certain group of observed patients. Let X(t), denote the process which givesthe statistical distribution of the sizes of tumors in the group at time t ≥ 0, and let F (x, t) denoteits distribution, defined by
F (x, t) = P (X(t) ≤ x), x ≥ 0.
The classical way to recover the evolution of F (x, t) consequent to a growth driven by equation(38) is to remark that, if x(t) denotes the solution (39) to equation (38) departing from the valuex ≥ 0 at time t0 < t, then
P (X(t) ≤ x(t)) = P (X(t0) ≤ x),
or, what is the sameF (x(t), t) = F (x, t0) = const. (43)
Hence, taking the time derivative on both sides of (43) we obtain
d
dtF (x(t), t) =
∂F (x, t)
∂t+ x(t)
∂F (x, t)
∂x
∣∣∣∣x=x(t)
= 0. (44)
Using (38) into (44) one shows that F (x, t) satisfies the conservation law [46]
∂F (x, t)
∂t+α
δx
(1−
(x
xL
)δ)∂F (x, t)
∂x= 0. (45)
Let us suppose that F (x, t) is regular with respect to x, and let f(x, t) denote the probabilitydensity of the process X(t). In terms of the probability density f(x, t) the conservation law isrewritten as
∂f(x, t)
∂t+α
δ
∂
∂x
[x
(1−
(x
xL
)δ)f(x, t)
]= 0, (46)
which is obtained from (45) simply by differentiation with respect to x. The complete descriptionof the dynamics of growth is then obtained by taking into account that growth can also be subjectto random fluctuations, which is reasonable to assume proportional to the size X(t). This isclassically obtained by introducing the multiplicative action on X(t) of a standard Brownianmotion of width σ, independent of X(t) (cf. [2] and the references therein), which leads to addinga second-order term into (46). Thus, the resulting model is the Fokker–Planck type equation
∂f(x, t)
∂t=σ
2
∂2
∂x2(x2f(x, t)
)− α
δ
∂
∂x
[x
(1−
(x
xL
)δ)f(x, t)
],
As an example, the Gompertz growth case δ → 0 considered in [2] is described by
∂f(x, t)
∂t=σ
2
∂2
∂x2(x2f(x, t)
)+ α
∂
∂x
(x log
x
xLf(x, t)
). (47)
Once the growth model has been formalized, the effects of a given therapy is included in the modelby assuming that the growth parameters in equation (38) are time-dependent functions [2]. Inthis way, the study of the growth in presence of a treatment can be approached by studying themodifications induced in time by these functions. Clearly, the knowledge of the action of thesefunctions should allow to evaluate the effectiveness of the therapy on time, and in addition tobetter establish treatment schedules. In the notations used in [2], the parameters α and xL in thedrift term of the Fokker–Planck equation (47) have been considered as functions of time with thefollowing dependence
α(t) = α−D(t), xL(t) = xL exp
{− C(t)
α−D(t)
}. (48)
21

where C(t) and D(t) (the therapy) have to be estimated to diminish at best the size of the tumorin time. Then, the strategy consists in performing experimental studies to test the effectiveness ofthe therapeutic treatment including a control (untreated) group and one (or more) treated groups,where the growth in time of the control group follows the dynamics of the Fokker–Planck equation(47), while the treated groups are described by the modified Fokker–Planck equation (47) in whichthe coefficients of the drift term are modified according to (48). The comparison allows to estimatethe unknown functions C(t) and D(t).
While this procedure helps to shed a light into the problem of finding the effects of the therapy,the choice of acting on growth in terms of the functions C(t) and D(t), which in the originalformulation in [2] is additive, is largely arbitrary, and in any case does not help to find the bestway to act on the growth to obtain regression, nor to understand the statistical variations on theresulting final distribution of the treated group with respect to the one of the untreated group.
Acknowledgement
This work has been written within the activities of GNFM and GNCS groups of INdAM (NationalInstitute of High Mathematics). The research of G. T. and M. Z. was partially supported byMIUR - Dipartimenti di Eccellenza Program (2018-2022) - Dept. of Mathematics ”F. Casorati”University of Pavia. The research of L.P. was partially supported by MIUR - Dipartimenti diEccellenza Program (2018-2022) - Dept. of Mathematical Sciences ”G. L. Lagrange”, Politecnicodi Torino.
References
[1] J. A. Adam, and N. Bellomo. A Survey of Models for Tumor-Immune System Dynamics.Springer Science + Business Media, New York, 1997.
[2] G. Albano, and V. Giorno. A stochastic model in tumor growth, J. Theor. Biol. 242: 329–336,2006.
[3] G. Albi, M. Herty, and L. Pareschi. Kinetic description of optimal control problems andapplications to opinion consensus. Commun. Math. Sci., 13(6): 1407–1429, 2015.
[4] G. Albi, M. Fornasier, and D. Kalise. A Boltzmann approach to mean-field sparse feedbackcontrol. IFAC PapersOnLine, 50(1): 2898–2903, 2017.
[5] G. Albi, L. Pareschi, G. Toscani, and M. Zanella. Recent advances in opinion modeling:Control and social influence. In Active Particles, Volume 1: Theory, Models, Applications N.Bellomo, P. Degond, E. Tadmor, Eds. Ch.2, pp. 49-98. Birkhauser Boston 2017.
[6] G. Albi, L. Pareschi, and M. Zanella. Boltzmann–type control of opinion consensus throughleaders. Phil. Trans. R. Soc. A, 372: 20140138, 2014.
[7] L. Amoroso. Ricerche intorno alla curve dei redditi. Ann. Mat. Pura Appl. 21: 123–159, 1925.
[8] A. Bensoussan, J. Frehse, and P. Yam. Mean Field Games and Mean Field Type ControlTheory, Springer Briefs in Mathematics. Springer, New York, 2013.
[9] N. Bellomo. Modeling Complex Living Systems: A Kinetic Theory and Stochastic Game Ap-proach. Birkhauser, Boston, 2008.
[10] N. Bellomo, and M. Delitala. From the mathematical kinetic, and stochastic game theory tomodelling mutations, onset, progression and immune competition of cancer cells, Phys. LifeRev. 5: 183–206, 2008.
22

[11] N. Bellomo, N. K. Li, and P. K. Maini. On the foundations of cancer modelling: selectedtopics, speculations, and perspectives. Math. Mod. Meth. Appl. Sci. 18 (4): 593–646, 2008.
[12] E. F. Camacho, and C. Bordons Alba. Model Predictive Control, Springer–Verlag, London,2007.
[13] C. Cercignani. The Boltzmann equation and its applications, Springer Series in AppliedMathematical Sciences, Vol.67 Springer–Verlag, New York 1988.
[14] G. Dimarco, and G. Toscani. Kinetic modeling of alcohol consumption, J. Stat. Phys.177:1022–1042, 2019.
[15] G. Dimarco, and G. Toscani. Social climbing and Amoroso distribution. Math. Mod. Meth.Appl. Sci. 30 (11) 2229–2262, 2020.
[16] S. A. Frank. Dynamics of Cancer: Incidence, Inheritance, and Evolution. Princeton Series inEvolutionary Biology, Princeton University Press, 2007.
[17] S. A. Frank. Somatic mosaicism and cancer: inference based on a conditional Luria-Delbruckdistribution. J. Theor. Biol. 223 (4): 405–423, 2002.
[18] G. Furioli, A. Pulvirenti, E. Terraneo, and G. Toscani. Fokker–Planck equations in the mod-elling of socio-economic phenomena. Math. Mod. Meth. Appl. Sci. 27 (1): 115–158, 2017.
[19] G. Furioli, A. Pulvirenti, E. Terraneo, and G. Toscani. Non-Maxwellian kinetic equationsmodeling the evolution of wealth distribution. Math. Mod. Meth. Appl. Sci. 30 (4): 685–725,2020.
[20] X. Gabaix. Zipf’s law for cities: an explanation. The Quarterly journal of economics, 114 (3)739–767, 1999.
[21] P. Gerlee. The model muddle: In search of tumor growth laws. Cancer Research, 73: 2407–2411, 2013.
[22] F. Grizzi, and M. Chiriva-Internati. Cancer: looking for simplicity and finding complexity.Cancer Cell Int. 6: 4, 2006.
[23] L. Grune. Analysis and design of unconstrained nonlinear MPC schemes for finite and infinitedimensional systems. SIAM J. Control Optim., 48(2): 1206–1228, 2009.
[24] S. Gualandi, and G. Toscani. Call center service times are lognormal. A Fokker–Planck de-scription. Math. Mod. Meth. Appl. Sci. 28 (08): 1513–1527, 2018.
[25] S. Gualandi, and G. Toscani. Human behavior and lognormal distribution. A kinetic descrip-tion. Math. Mod. Meth. Appl. Sci. 29(4): 717–753, 2019.
[26] P. Degond, M. Herty, and J.-G. Liu. Meanfield games and model predictive control. Commun.Math. Sci., 15(5): 1403–1422, 2017.
[27] M. Fornasier, B. Piccoli, and F. Rossi. Mean-field sparse optimal control. Phil. Trans. R.Soci. A, 372(2028): 20130400, 2014.
[28] N. Henscheid, E. Clarkson, K. J. Myers, and H. H. Barrett. Physiological random processesin precision cancer therapy, PLoS ONE 13(6): e0199823, 2018.
[29] H. Hatzikirou, L. Brusch, C. Schaller, M. Simon, and A. Deutsch. Prediction of travelingfront behavior in a lattice-gas cellular automaton model for tumor invasion. Comput. Math.Appl. 59: 2326–2339, 2010.
[30] M. Herty, and M. Zanella. Performance bounds for the mean–field limit of constrained dy-namics. Discrete Contin. Dyn. Syst., 37(4): 2023–2043, 2017.
23

[31] D. Kahneman, and A. Tversky. Prospect theory: an analysis of decision under risk, Econo-metrica 47 (2): 263–292, 1979.
[32] G.P. Karev, Y.I. Wolf, A.Y. Rzhetsky, F.S. Berezovskaya, and E.V. Koonin. Birth and deathof protein domains: A simple model of evolution explains power law behaviour. BMC Evol.Biol., 2: 18 (2002).
[33] E. Kashdan, and L. Pareschi. Mean field mutation dynamics and the continuous Luria-Delbruck distribution. Mathematical Biosciences 240: 223–230, 2012.
[34] D.G. Kendall. Birth-and-death process and the theory of carcinogenesis. Biometrika 47: 13–21, 1960.
[35] R. Langer, H. Conn, J. Vacanti, C. Haudenschild, and J. Folkman. Control of tumor growth inanimals by infusion of an angiogenesis inhibitor, Proc. Natl Acad. Sci. USA, 77: 4331–4335,1980.
[36] V.A. Kuznetsov. Statistics of the numbers of transcripts and protein sequences encoded inthe genome. In Zhang W., Shmulevich I. (eds) Computational and Statistical Approaches toGenomics, pp. 125–171 Springer, Boston, 2003.
[37] J.H. Lienhard, and P.L. Meyer. A physical basis for the generalized gamma distribution.Quarterly of Applied Mathematics, 25 (3): 330–334, 1967.
[38] M. Marusic, S. Vuk-Pavlovic, J. P. Frejer. Tumor growth in vivo and as multicellular spheroidscompared by mathematical models. Bull. Math. Bio. 56 (4): 617–631, 1994.
[39] J. Moreira, and A. Deutsch. Cellular automaton models of tumor development: a criticalreview. Adv. Comp. Syst. 5: 247–267, 2002.
[40] G. Naldi, L. Pareschi, and G. Toscani. Mathematical modeling of collective behavior in socio-economic and life sciences, Birkhauser, Boston 2010.
[41] M.E. Newman. Power laws, Pareto distributions and Zipf’s law. Contemporary Physics 46(5): 323–351, 2005.
[42] A. G. Nobile, and L. M. Ricciardi. Growth and extinction in random environment. In Appl.Inform. Control Syst.: 455–465, 1980.
[43] L. Norton. A Gompertzian model oh human breast cancer growth, Cancer. Res. 48(24 Part1): 7067–7071, 1988.
[44] L. Pareschi, and G. Russo. An introduction to Monte Carlo method for the Boltzmann equa-tion, ESAIM: Proc. 10: 35–75, 2002.
[45] L. Pareschi, and G. Toscani. Interacting Multiagent Systems: Kinetic equations and MonteCarlo methods, Oxford University Press, 2013.
[46] B. Perthame. Transport Equations in Biology. Birkhauser, Basel, 2007.
[47] Prajneshu. Diffusion approximation for models of population growth with logarithmic inter-actions. Stochastic Process. Appl., 10(1): 87–99, 1980.
[48] L.M. Ricciardi. On the conjecture concerning population growth in random environment.Biol. Cybern., 32: 95–99, 1979.
[49] I.A. Rodriguez-Brenes, N.J. Komarova, and D. Wodarz. Tumor growth dyanmics: insightsinto evolutionary processes. Trends in Ecology and Evolution, 28: 597–604, 2013.
[50] T. Roose, S. J. Chapman, and P. K. Maini. Mathematical models of avascular tumor growth,SIAM Rev. 49(2): 179–208, 2007.
24

[51] E.A. Sarapata, and L.G. de Pillis. A comparison and catalog of intrinsic tumor growth models.Bull. Math. Biol., 76: 2010–2024, 2014.
[52] H. Schattler, and U. Ledzewicz. Optimal Control for Mathematical Models of Cancer Thera-pies, Springer 2015.
[53] E. D. Sontag. Mathematical Control Theory: Deterministic Finite Dimensional Systems.Springer, New York, 1998.
[54] E.W. Stacy. A generalization of the gamma distribution. Ann. Math. Statist. 33: 1187–1192,1962.
[55] W.Y. Tan. A stochastic Gompertz birth-death process. Stat. Probab. Lett., 4: 25–28, 1986.
[56] G. Toscani. Kinetic models of opinion formation. Commun. Math. Sci., 4(3): 481–496, 2006.
[57] G. Toscani. A kinetic description of mutation processes in bacteria. Kinet. Relat. Models, 6(4): 1043–1055, 2013.
[58] G. Toscani. Statistical description of human addiction phenomena. In Trails in Kinetic The-ory: Foundational Aspects and Numerical Methods, A. Nota, G. Albi, S. Merino-Aceituno,M. Zanella Eds., to appear.
[59] V.G. Vaidya, and F.J. Alexandro. Evaluation of some mathematical models of tumor growth.Int. J. Biomed. Comput., 13: 19–35, 1982.
[60] C. Villani. Contribution a l’etude mathematique des equations de Boltzmann et de Landauen theorie cinetique des gaz et des plasmas. PhD thesis, Univ. Paris-Dauphine 1998
[61] G.B. West, J.H. Brown, and B.J. Enquist. A general model for ontogenetic growth. Nature413 628–631, 11 October 2001.
[62] T. E. Wheldon. Mathematical Models in Cancer Research, Taylor & Francis, London, 1988.
[63] D. Wodarz, and N. Komarova. Dynamics of Cancer: Mathematical Foundations of Oncology.World Scientific, 2014.
25