Embed Size (px)
Citation preview

Control of an Affordable Hand and Wrist Prosthesis
Zachary Abraham Dong Bien Kwon
[email protected] [email protected]
Talia Solomon Michael Xie Karina Yeh
[email protected] [email protected] [email protected]
New Jersey Governor’s School of Engineering and Technology 2015
Abstract Different designs of prosthetic limbs
are available on the market, but the majority
of those systems are too expensive for the
average amputee. These options are also
often ineffective or require invasive
procedures for implementation.1 In this
study, a three dimensional (3D) printed
prosthesis for below-the-elbow amputees,
which was designed by a team of Rutgers
University School of Engineering
undergraduate students for their senior
design project, was paired with Thalmic
Lab’s Myo armband to provide an
affordable, practical, and convenient
experience for amputees. The Myo provided
data on muscle activity around the forearm
as well as orientation data of the arm. The
data was processed and sent to an Arduino
that was used to control servo motors
attached to the prosthetic hand and wrist,
which manipulated the digits and moved the
wrist. The prosthesis that was developed is a
functional replacement limb with an
innovative control mechanism that could
positively affect not only amputees, but also
fields such as industry and medicine.
1. Introduction Many amputees abandon their
prosthetic arms and wrists because the
weight and dimensions of various prostheses
can cause discomfort and issues with user
coordination.2 These complications often
arise when the prostheses do not fit the
amputee properly and create a demand for
customized prosthetic limbs. However,
customized healthcare is often extremely
expensive because the specifications of each
individual’s condition must be taken into
consideration.
In response to this issue, the use of
3D printers to manufacture prostheses has
been introduced. 3D printing allows for the
development of lighter prostheses that can
easily be modified to fit the amputee. It is
important to take advantage of the new
technology provided by 3D printers to make
prostheses affordable for all amputees.
Otherwise, amputees who fail to replace
their limbs may experience complications
when they rely on their opposite arm or leg,
such as overuse injuries and arthritis.3
Affordability and functionality are
also key aspects of prostheses. In this study,
a working and cost-effective prosthetic hand
and wrist was developed using 3D printing
and a Myo armband as the control
mechanism. This device acts as highly
functional but still affordable prosthesis.
Other advanced prostheses utilize
implantable myoelectric sensors (IMES),
which can easily control prostheses, but
require invasive surgery. Procedures such as
these increase both the price and recovery
time of receiving a prosthesis.3 The price,
recovery time, and the hazards of surgical
operations are incredibly important issues,
especially since 2.4 million of the 3 million
amputees in the world are from developing
countries. In these locations, it is more
difficult for patients to be able to afford

prosthetic limbs that involve expensive
medical procedures, such as operations that
implant IMES.4 The Myo is a cheaper
alternative to implanted sensors because it
requires no surgery while still providing
reliable data to control the hand.
A Myo armband combined with a 3D
printed hand and wrist has many
applications. For example, they can be used
as a prosthesis for an amputee whose
residual limb begins below the elbow. The
prosthesis can be controlled by different
forearm muscle configurations that the Myo
senses. These positions have equivalent
muscle flexions that can be taught to the
amputee in physical therapy. The prosthesis
and Myo also have applications in industry
and medicine. Researchers working with
dangerous or caustic materials could
conduct experiments from a safe distance
while manipulating the hand with the Myo.
The device could additionally function as a
remote surgical robot, which could be used
by a surgeon in the military to protect the
surgeon from the risks inherent of a combat
zone.
In this study it was tested whether a
3D printed hand controlled by the Myo
could mimic several natural hand positions
including wrist flexion and extension, digit
extension and flexion, thumb circumduction,
and grasps varying in strength.
2. Background
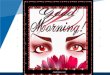
2.1 Myo The Myo armband, seen in Figure 1,
was created by Thalmic Labs. It has medical
grade stainless steel electromyography
(EMG) sensors and a nine-axis inertial
measurement unit (IMU) with a three-axis
gyroscope, a three-axis accelerometer, and a
three-axis magnetometer. The EMG sensors
detect muscle contractions and movements
in the arm that correspond with distinct hand
motions, such as a double tap of the index
finger and thumb, an open hand, a wave to
the right or left, and a fist.5 With the IMU,
the Myo can record the pronation and
supination, the role, of the forearm.2,5
The
data from the Myo is processed by an ARM
Cortex M4 processor. Retailing at $199.99,
the armband also comes with a modified
Bluetooth adapter to communicate with a
computer as well as a micro USB cable to
charge the device.5
2.2 Arduino Arduino is an open-source platform
that consists of a microcontroller and an
integrated development environment (IDE).
Arduino is commonly used in electronics
projects and has been popularized by its
affordability, and simplicity in usage and
language, which is a simplified form of
C++, another well-reputed programming
language. The Arduino microcontroller
easily allows the user to attach LEDs,
sensors, and other electronic pieces to
develop projects with ease.6
There are many
different types of Arduino microcontroller
boards available on the market, each with
distinct functions. For this study, the
Arduino Uno was used. The Uno was
readily available and also had a sufficient
number of pins to control the five servo
motors for the fingers and the servo motor
for the wrist.
Figure 1: The Myo Armband sits snugly
below a user’s elbow

2.3 3D Printing Current 3D printing technology
involves building three-dimensional
structures layer-by-layer with 2D cross-
sections. Machines generally use resins,
filaments, waxes, or powders to build and
fuse layers together. Industrial 3D printers
generally cost from $25,000 to $1 million
and can print up to 2 x 2 x 1 feet. More
affordable, smaller-scale personal 3D
printers use a Fused Deposition Modeling
(FDM) process, which deposits lines of
melted plastic filament in layers.7
Most personal printers use
acrylonitrile butadiene styrene (ABS) or
biodegradable polylactic acid (PLA)
filament. These filaments cost about $29 for
one kilogram at diameters of 1.75mm,
making it very available and affordable for
people who have access to personal or
public 3D printers.8
3D printing is a fast and affordable
way to prototype designs and to create
finished products within hours. This reduces
the necessity for the additional machinery
that is conventionally used to refine objects,
saving money and time. In addition, 3D
printing is used to create physical
representations of computer aided design
(CAD) files.
Furthermore, 3D printers and other
computer numerically controlled (CNC)
machines usually utilize a standard
triangulated stereolithography (STL) file
format.8 As a result, 3D printed prosthetic
limbs and other devices can be customizable
forms of healthcare. For example, in a case
study performed by Xi’an Jiaotong
University in Xi’an, China, researchers
created a “3D reconstructed freeform model
of [a] femur bone [that] conformed to the
original anatomy within a maximum
deviation 0.206mm,” and used this design to
construct a mold for a composite hemi-knee
joint substitute.9
2.4 Servos Servos are motors that consist of
gears and a shaft and can be set at specific
positions to move the fingers. The shaft can
be positioned at a degree ranging from 0-
180 degrees for typical servos, but for
continuous servos, the shaft can be placed at
any degree. Servos have three wires to
communicate with the controller board or
chip: power, ground, and signal.10
The
motors are controlled by pulse width
modulation (PWM). The width of a pulse
sent from the chip to the motor defines the
desired location of the shaft. The shaft then
rotates a number of degrees to meet the
desired position. As a result of its nature,
servo motors are used in applications that
require a setting of position.11
2.5 Microsoft Visual Studio Visual Studio is an integrated
development environment (IDE) software
created by Microsoft. The environment
allows for developers to create and build
various types of applications. Visual Studio
supports many programming languages such
as various forms of C and Java. Free
versions of the IDE are readily available
online and allow anyone to develop software
in a simple and convenient way.12
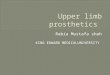
2.6 The InfinityHand
The InfinityHand, as seen in Figure
2, is a 3D printed prosthetic hand and wrist
developed for a biomedical engineering
senior design project at Rutgers University.
It has five servos in the palm that control the
movement of the fingers, and its wrist has
three degrees of freedom: flexion and
extension, pronation and supination, and
medial and lateral. It had three degrees of
freedom, because that was enough degrees
to allow the amputee to do activities of daily
living.13

3. Methods/Experimental Design
3.1 Design and Development It was decided that the prosthetic
hand and wrist would be 3D printed in order
to make the prosthesis the most affordable
and easily customizable. The design of the
InfinityHand was chosen because a printed
model of the prosthesis was readily available
for testing so the study could be focused on
the development of the control of the
prosthesis, rather than the design of the
physical prosthesis. The InfinityHand was
printed using affordable materials such
aspolylactic acid (PLA) and acrylonitrile
butadiene styrene (ABS). The Myo armband
was chosen as the control media because it
was the most cost-effective option with a
retail price of $199.99. It also had the most
natural simulation of hand motions based on
muscle movements in the arm.
An additional palm cap was designed
on SolidWorks to supplement the
InfinityHand. It was added to improve the
appearance of the hand and protect the
servos that it covered. It was designed to fit
over the InfinityHand and be attached to the
rest of the prosthesis with clips. Once the
design process was completed, it was
printed. However, it was decided that the
palm cap was too thick and made the
prosthesis unnaturally large. The original
palm cap was made thinner so that it would
be more aesthetically pleasing and
ergonomic.
3.2 Hardware The prosthesis design was based off
of a model developed by Christopher
Bargoud, Mohit Chaudhary, Julian Hsu,
Rebecca Wenokor, and James Wong. The
model designed in their project was used for
testing purposes during the first two weeks
of the project while the revised model was
being designed and printed. It was decided
that the design would be reworked so that it
was more compatible with the decided
course of research; the lowest wrist section
was removed to simplify the design and the
code that was needed to control the
prosthesis and the knuckle piece was also
curved to allow for better movement of the
rubber bands. The prosthesis utilized five
servo motors to control each individual
finger as well as one servo motor to control
the wrist. A breadboard was used to connect
the Arduino uno to the prosthesis. Both the
five volt and ground pins were wired to each
servo motor and a third pin was used as the
output pin to modulate the degree of
rotation.
The prosthesis is controlled by the
Myo armband using proprietary EMG
sensors to detect changes in the electric
potentials of one’s muscles.14
By analyzing
these potentials, the Myo can detect specific
positions of one’s hand solely based on the
muscle movement on one’s forearm. The
positions consist of an open hand, fist, wave
in, wave out, double tap of the fingers.5
3.3 Assembly Once the parts of the prosthesis were
printed, the project team began to assemble
Figure 2: The InfinityHand and circuitry

the prosthesis. Each piece needed to be
sanded so the joints would fit together with
minimal friction. Then the joints were
attached with 16 gauge and 1.25 inch nails,
and bolt cutters were used to shorten their
shaft. All of the pinkie’s joints and the distal
inter-phalangeal joint of the ring finger were
attached with 1/16 in. by ½ in. aluminum
dowel pins. The ends were then secured with
hot glue. The nails also reduced the friction
because they are metal and smooth. The
various segments were attached with
superglue where the pieces met flush.
Rubber bands were cut open and attached to
the fingers with screws screwed into holes in
the fingers. The knuckles were then
connected to the palm sides with nuts and
bolts. The palm parts, with five of the servos
screwed on, were slid into the groove in the
palm sides. Professional grade fishing line
was strung through the holes in the fingers
to the servos. The fishing line was then
connected to the servos. The finished hand is
shown in Figure 3.
Then the wrist was constructed after
printing. A gear and a servo were attached
with a rod into the wrist piece. The wrist
joint pieces were then screwed together and
additionally attached to the wrist connector
plates. Then the palm sides were attached to
the top wrist joint piece with plastic rods
that were 3D printed. After that the palm cap
was clipped together on top of the
prosthesis. Rubber cement was also painted
on top of the fingers and the palm cap to
increase the grip of the prosthesis.
3.4 Software One of the major components of the
project was the software and technological
development for the prosthesis. To program
the Arduino, the Arduino programming
environment was employed and the
executable application to send data from the
Myo to the Arduino was programmed in
Visual Studio 2013 with the C++ language.
The first major task that needed to be
completed was to be able to make the Myo
and the Arduino communicate. Due to the
fact that the Myo and the Arduino operate
on two completely separate softwares, new
code was written (an executable) to receive
the data the Myo produced, which was then
sent to the Arduino. While writing this type
of code from scratch is possible, such a task
is complex and would have used up a
significant portion of the time available for
the project. Fortunately, one of the
applications uploaded to the Myo Beta
Market, aptly named MyoDuino and
developed by Jake Chapeskie, allows for
nearly instantaneous communication
between the Myo and the Arduino.15
Once
the application was downloaded, the
Arduino Uno microcontroller accessed the
code by means of a library. The library
allowed all the MyoDuino code to be used
by people who did not write it. The
computer read the various output data from
Figure 3: The fully assembled prosthetic
hand sans palm cap.

the Myo and sent it over serial
communication to the connected Arduino.
This setup allowed for a seamless
transmission between the received Myo data
and the Arduino microcontroller.
Once the software was set up, each
servo motor on the prosthetic hand was
wired to the Arduino. Since the Myo can
only recognize five positions, five different
“cases” were coded as individual “if
statements.” For an open hand, each servo
was set to 5 degrees, and for the fist each
servo was set to 175 degrees. The reason it
was not set to 0 and 180 degrees is that the
servos start to make noise when at the limits
of their movement.
The “wave in” motion was used to
simulate a peace sign (pointer and middle
fingers extended at 5 degrees while the rest
flexed at 175) in order to test finger
movement (wrist motion was tested soon
after). Similarly, the wave out function was
used to make an okay sign (thumb and
pointer fingers flexed at 175 degrees while
the rest extended at 15 degrees).
Finally, the double tap function was
used to simulate a demo of each finger;
starting with the thumb, each finger took
turns flexing and extending. Once each
action was completed, the fingers all flexed
together to form a fist, and then extended to
form an open hand. This demo was another
way to measure the capabilities of each
finger both individually and as a unit.
After full functionality of the Myo
and the prosthesis was established, the next
step was to devise a method to modulate the
extent to which the fingers flex. Rather than
two set positions (either fully flexed or fully
extended), an adaptive prosthesis with the
capability of modulating how much each
finger flexed would give the user greater
dexterity. The problem with this type of
functionality was that the MyoDuino
executable application only allowed for the
data of the five hand positions to be sent to
the Arduino. While the Myo itself can also
measure the roll, pitch, and yaw of the user’s
arm with the Myo’s IMU, the executable
was not programmed to send over this data.
Roll, pitch, and yaw was another set of data
that was accessible to be used to control the
prosthesis have variable grip In order to
solve the problem of not having a method of
communication between the Myo and
Arduino for this data, the MyoDuino
software itself had to be modified. Visual
Studio 2013, shown in Figure 4, was used to
complete this task. Since the executable was
written in C++, Visual Studio allowed for
editing of the executable in its original
language.
After the executable was modified to
send over the data for the roll of the arm, an
example code was written to display the
corresponding variables. The variable
values were related to the number of degrees
of rotation in the arm. The variables were
assigned numeric values from 0 to 18, where
0 was the maximum roll clockwise, and 18
was the maximum roll counterclockwise. In
order to modulate the grip of the prosthesis,
the variable roll data was mapped to
correspond to the angles of the servos.
However, even though the roll of the arm
was measured from 0 to 18, the user would
need to fully stretch his arm to reach those
values. As a result, instead of being mapped
from 0 to 18, the roll was mapped from 5 to
Figure 4: The Visual Studio 2013 IDE was used
to code and edit the MyoDuino application

15. This range allowed for a more
comfortable experience when using the
Myo. The degrees of the servos ranged
from 5 to 175. By mapping the roll
variables to the degrees of the servos, the
prosthesis was capable of modulating its
grip rather than simply making a fist or open
hand, since amputees would ideally require
various levels of finger flexion when
gripping objects.
While the modulated grip functioned
properly, an issue with the movement
stemmed from the variables themselves.
Due to the fact that the range of the roll was
5 to 15, by merely changing from 5 to 6, the
degrees of the servos were increased by 1/11
(9.09%). This in turn caused the fingers on
the prosthesis to appear jerky since one
“degree” of roll translated to over 14
degrees of the servos. This motion was
smoothed out by increasing the multiplicity
factor of the algorithm within the executable
that interpreted the raw roll data.
Consequently, instead of 5 to 15, the roll
data ranged from 110 to 290. The wider
range of integers enabled the servos to move
more smoothly and allowed the flexion of
the fingers to be modulated more precisely.
Following the development of the hand, the
wrist functionality was tested. Similar to the
fingers, the wrist was controlled by a servo
motor, but rather than by pulling a string, the
motor controlled the wrist by a differential
gear system.
4. Results and Discussion
4.1 Hand Functionality and Affordability The configuration of the overall
design has each pose detected by the Myo
correspond to a predetermined gesture on
the prosthetic hand or wrist. There are
currently six gestures programmed into the
Arduino, shown in Figure 5, which can be
increased in the future.
In addition, the prosthesis will
change its fist grip strength to varying
degrees as the Myo wearer rolls their
forearm to different degrees while holding a
fist. The roll angle returned from the Myo
IMU as a user rolls his hand is shown in
Figure 6. The hand is also relatively light for
the user at 496 grams. This is because a
small infill was used. The PLA and ABS are
also much lighter materials as opposed to
the metal that other prostheses are made of.
The hand is also affordable
compared to the currently marketed
products, which generally cost more than
$10,000.16
It takes about $635 to reproduce
this prosthesis. This includes the cost of
purchasing a netbook to communicate
between the Myo and the Arduino.
However, any kind of portable computer
would be sufficient as long as it can connect
to the Arduino. This would reduce the cost
Figure 5: Gestures detected by the Myo and how they control the prosthetic hand and wrist

further. The majority of the remaining cost
covers the cost of the Myo and the servos
needed to operate the prosthesis. The rest of
the price is from the printing of the
prosthesis, as well as various pieces of
hardware required to assemble the hand and
wrist. A specific breakdown of the costs is
shown in the table in Figure 7.
4.2 Discussion From the observed capabilities of the
hand and wrist prosthesis, it is evident that
the device would be as effective as a
currently marketed artificial limb for below-
elbow amputees. A passive adaptive hand
system has “the ability of the fingers to
conform to the shape of an object held
within the hand. During grasping, the four
fingers and thumb are able to flex inwards
independently, to conform to the shape of
the object.”17
Meanwhile, an adaptive hand
can actively flex each of its fingers
individually to different degrees. A non-
adaptive hand can only fully open or fully
close its fingers.18
Therefore, the Myo-
controlled system acts as a hybrid between a
non-adaptive and an adaptive prosthetic
limb. The prosthesis designed as part of this
project is capable of flexing and extending
its fingers fully, as well as controlling each
finger individually, one at a time, to grasp
objects as an adaptive prosthetic hand
would.
In a study performed by the
Department of Rehabilitation Medicine at
the Linköping University Hospital in
Sweden, eight patients compared the
functionality and the aesthetic qualities of
nonadaptive and adaptive prosthetic hands.
The patients concluded through objective
and subjective tests that they preferred the
non-adaptive hand over the adaptive one
because it supplied more grip.18
The Myo-
controlled hand and wrist prosthesis has a
coating of rubber cement to add grip,
making it a more useful prosthesis.
Figure 6: The roll angle returned by the IMU on the Myo as a user rotates his hand back and forth
about the axis of the forearm.

Item Cost/Unit
(USD) Quantity
Cost
(USD)
Servos $14.99 6 $89.94
Myo
Armband $199.99 1 $199.99
Arduino $23.99 1 $23.99
Screws,
nuts, bolts
(misc)
$6.50 1 $6.50
Printer
filament
/cm
$100 1 $100
Netbook $200 1 $200
Fishing
Line $3.49 1 $3.49
Rubber
bands
(1/4th of
pack)
$1.99 1 $1.99
Super
Glue (1/2
bottle)
$1.50 1 $1.50
Wires $4.99 1 $4.99
Resistors
(pack) $2.10 1 $2.10
Nails
(1/5th
pack)
$0.25 1 $0.25
Rubber
Cement $1.19 1 $1.19
Total -- -- $635.93
Furthermore, the patients disliked the
adaptive hand because it weighed 595
grams, while the non-adaptive hand weighed
505 grams. Therefore, the Myo-based hand
would be extremely practical, since the hand
weighed 237 grams and the wrist weighed
259 grams, for a total of 496 grams.18
There are several options for control
of prostheses. Currently, the main categories
are body-powered and myoelectric
prostheses. However, new methods of
operating prostheses are being developed.
One of these is targeted muscle
reinnervation, where peripheral nerves are
relocated to the residual limb. These nerves
create more signals making it easier for the
myoelectric sensors to provide data for the
control of the prosthesis.1There are also
prostheses controlled by IMESs, eight of
which are surgically implanted into the
residual limb. They offer consistent signals
as well as a high level of functionality.3
Another means of operating a prosthesis is
through multi-electrode arrays that are
implanted 1-2mm into the cortex. These
innovative methods are capable of
increasing the functionality of prostheses,
yet are much more invasive. On the other
hand, myoelectric sensors can have trouble
sensing multiple signals from a residual
limb, yet have less risk. In a study
discussing which types of control devices
amputees are most interested, it was found
that amputees were most interested in
myoelectric sensors. The amputees’
responses to whether they were very
interested or not interested in more
functional prostheses did not fluctuate
between the different levels of
functionality.1 This suggests that amputees
will be interested in using the Myo as a
sensor, because it is functions well and is
noninvasive. Additionally, 74 percent of
amputees that do not use prostheses were
willing to try prostheses with better
technology and a cheaper cost. They also
wanted a large range of motion, changeable
grip strength, and the movement of multiple
joints at once.1 The prosthesis used in this
study fulfills these requests. However, it
does not answer the additional issues of
intuitive control and sensory feedback.
However with future developments these
features can be included.
The Myo is a good sensor, because it
is a easily used, noninvasive, and processes
the signals quickly. The sensors process the
Figure 7: Specific project cost breakdown

information and then it is transmitted over a
Bluetooth Smart connection to communicate
with the laptop that processes the data from
the Myo and sends it to the prosthesis.
However, the prosthesis still needs to be
attached to the laptop with wires. In the
future this information transmission can be
upgraded to a Bluetooth connection.
The prosthesis created in this study is
much more affordable than the existing
prostheses on the market and provides a
much more natural experience for the user.
The cost of the prosthesis built in this study
is $635, which is significantly less
expensive than the prostheses that use IMES
or multi-electrode arrays.
In addition to its function as a
prosthetic hand and wrist for below-elbow
amputees, the device could also be used for
industrial work to reduce the risk of worker
injuries. In factories where machinery and
hazardous chemicals are regularly utilized,
employees are frequently concerned with
health risks due to their work, and job
insecurity caused by such injuries.19, 20
For
example, out of “146 14- to 16-year-olds
who incurred an occupational injury [...],
thirty-two percent of the injuries occurred as
the result of using equipment,” showing that
machines and tools account for a large
portion of occupational hazards.21
As a
result, companies frequently assign injured
workers to safer jobs and hire subcontractors
in order to maximize work and minimize
liability costs.20
The hand and wrist
apparatus could be used to assist fabricators,
assemblers, mechanics, repairers, machine
operators, chemical workers, and employees
in various other hazardous occupations.19
Workers would use the Myo to remotely
control the hand to perform simple tasks
such as pouring chemicals, pressing buttons,
and pulling levers, which would protect
employees from prolonged exposure to
dangerous materials. This would be similar
to a laboratory glovebox, but it would be
less expensive because it is 3D printed and it
would be applicable to a wider range of
occupations. Furthermore, increased
consistency in worker productivity would
lower liability and subcontractor costs,
increasing company stability while
affordably protecting employees.
Furthermore, the appliance would be
useful for remote surgery in locations where
professional medical expertise and
equipment are scarce. In 2002, doctors
responsible for a French study “attempted
remote robot-assisted laparoscopic
cholecystectomy” with an asynchronous
transfer mode (ATM) telecommunication
system between New York City and
Strasbourg, France and experienced no
complications, and “despite a round-trip
distance of more than 14,000 km, the mean
time lag for transmission during the
procedure was 155 ms.” As a result, the
system of transoceanic surgery was
described as “perfectly reliable” and held
significant potential for remote surgery.22
Therefore, a similar but more cost-effective
system of remote transoceanic surgery could
be developed using the Myo-controlled
prosthesis and predeveloped transmission
methods.
In addition, since the Myo armband
operates based upon macro-movements of
the arm, the device could eliminate hand
tremors while surgeons are operating. This
would eliminate many issues due to a
surgeon’s age or level of fatigue,
maintaining his or her dexterity over both
short and long periods of time.22
Because the
prosthesis is inexpensive, it could be
implemented locally and remotely to
maintain consistency and efficiency in
surgeries.
With the reliability of the Myo-based
prosthesis and its ability to be applied
remotely, it could also potentially be
deployed in isolated rural areas or in
emergency situations as a fast and feasible

means of delivering assistance where
medical expertise and large, expensive
materials are unavailable. As proposed in
The New England Journal of Medicine,
time-sensitive medical care can be given
with the help of disaster-medical-aid centers,
which would provide accessible facilities for
emergency medical assistance.23
The
equipment in the medical centers or in rural
community centers could include a left and a
right Myo-controlled hand and wrist
prosthesis, along with surgical tools, a
camera, and a basic ATM system. The
system would be able to communicate with
an on-call emergency surgeon or a
specialized doctor who would be a volunteer
in another location. This method would
effectively provide people in emergencies or
remote areas with surgical assistance
without spreading medical personnel thin.
Furthermore, the ability to reach a doctor or
surgeon of a specific profession could
decrease the number of deaths following
disasters, because in the most time-sensitive
and critical injuries, “orthopedic and general
surgery skills are essential.”24
Overall, the
prosthesis could serve as a way to provide
widespread, affordable healthcare and to
increase doctor reliability.
4.3 Problems Encountered The initial challenge that was
encountered was the Myo’s Bluetooth
adapter. Once it was decided that the Myo
would be our medium of prosthesis control,
it was necessary to gain access to the data it
recorded. For this to be accomplished, the
Bluetooth adapter that came with the Myo
was needed. However, the box containing
the Myo was missing the adapter. Another
Myo was obtained; this one containing two
adapters. One adapter was a universal one
that did not include the software that was
necessary to obtain the information from the
Myo. The other was a Myo adapter that was
broken. A new Myo was then ordered with a
new adapter to allow experimentation to
begin. The challenge of not being able to use
the data recorded by the Myo delayed the
start of research because no code could be
tested and the viability of using the Myo was
undeterminable without the Bluetooth
adapter.
The appearance of the Infinity Hand
also proved to be a challenge. The
InfinityHand had most of its wiring and
servos inside the palm, exposed. It was
decided that in order to make the prosthesis
more visually appealing to an amputee a
palm cap should be designed to supplement
the Infinity Hand. A cover was designed on
Solidworks and then 3D printed. It gave the
prosthesis a better aesthetic, yet was slightly
thicker than desired. The design was then
improved to be thinner.
Another problem was the time it
required to print the prosthesis components.
For the first print a high infill percentage
was used and a low print speed. To decrease
the print time, the infill percentage was
decreased and the print speed was increased.
The decrease in the infill decreased the mass
of the hand in addition to the time. The hand
took 56 hours to print which was longer than
expected. For future use, it is advised that
multiple printers are used to shorten the
printing time.
A major technological challenge was
the limited number of poses that the Myo
armband was able to detect. As of now,
Thalmic Labs has only developed software
for the Myo armband to find five designated
poses. To add more functionality, the IMU
data was implemented. However, the data
from only one axis (roll) could be used since
the data from the other axes would interfere
with each other when the arm moved. For
increased options in the future, improved
algorithms could be created to interpret the
Myo’s EMG data. This would open
possibilities for detecting individual finger
movement and various combinations of

finger flexions and extensions. These
improved algorithms may also be able to
help the Myo detect the muscle contractions
more easily in amputees.
5. Conclusion The prosthesis that was created in
this research project is very applicable for
amputees as well as industry. The prosthesis
is innovative because it combines a new and
easy control mechanism with a well-
functioning prosthesis design. Its
affordability makes its accessible to many
people because it can be used by people who
cannot afford an expensive prosthesis. The
Myo provides a simple method of control
that does not require any invasive
procedures to implant sensors or manipulate
nerves. The design of the prosthesis can be
easily adapted because it is 3D printed. This
means that the design can be adjusted for the
size of the amputee’s residual limb or the
application the prosthesis is used for.
The objective of this project was to
create a straightforward method for
controlling the motions of a 3D printed
prosthesis. The prosthesis can alternate
between several different positions and has
the capability for future position additions. It
may be challenging for amputees to activate
some of the prosthesis positions because
their muscles have undergone trauma.
Methods to teach an amputee to manipulate
their arm muscles in different ways can be
designed in the future. Opportunities for
improvement could be based upon the data
spikes that correspond to finger movement.
Other aspects of the prosthesis and its
control system that could be upgraded in the
future are further degrees of freedom in the
fingers and wrist as well as the use easier
muscle contractions for amputees as signals.
6. Acknowledgements The authors appreciate the help and
guidance of our project mentors Julian Hsu
and Mary Pat Reiter. Julian’s and Mary
Pat’s assistance in the printing and assembly
of the prosthesis was necessary for the
completion of this project. The authors also
acknowledge Dr. William Craelius and Dr.
Kang Li for their help, resources, and
support. Resident Teaching Assistant, Kelly
Ruffenach, is thanked for her instruction.
The authors also appreciate Edmund Han’s
organization of the research projects. Ilene
Rosen and Dean Jean Patrick Antoine are
thanked for managing the Governor’s
School of Engineering and Technology. The
authors also thank the Governor’s School of
Engineering and Technology for providing
this research opportunity. The authors are
also grateful for all of the sponsors of the
Governor’s School of Engineering and
Technology. These include Lockheed
Martin, SilverlineWindows, Rutgers, the
State University of New Jersey, Rutgers
School of Engineering, South Jersey
Industries, Novo Nordisk, Pharmaceuticals,
Inc., New Jersey Resources, and the State of
New Jersey. Jake Chapeskie is thanked for
the MyoDuino library. Christopher Bargoud,
Mohit Chaudhary, Julian Hsu, Rebecca
Wenokor, and James Wong are thanked for
the design of the InfinityHand.
7. References 1 Engdahl, Susannah M. et al. 'Surveying
The Interest Of Individuals With Upper
Limb Loss In Novel Prosthetic Control
Techniques'. Journal of
NeuroEngineering and Rehabilitation
12.1 (2015): n. pag. Web.
2 Bajaj, Neil, Adam Spiers, and Aaron
Dollar. 'State Of The Art In Prosthetic
Wrists:'. Print.
3 Pasquina, Paul F. et al. 'First-In-Man
Demonstration Of A Fully Implanted
Myoelectric Sensors System To
Control An Advanced
Electromechanical Prosthetic Hand'.
Journal of Neuroscience Methods 244

(2015): 85-93. Web.
4 LeBlanc, Maurice. '"Give Hope - Give A
Hand" - The LN-4'. 2015. Presentation.
5 Thalmic.com,. 'Myo - Tech Specs'. N.p.,
2015. Web. 17 July 2015.
6 Learn.sparkfun.com,. 'What Is An
Arduino? - Learn.Sparkfun.Com'. N.p.,
2015. Web. 17 July 2015.
7 Ellerin, Stephen. 'The Art And Science Of
"3D Printing"'. Emedia 17.5 (2004):
14-15. Print.
8 3ders.org,. 'Price Compare - 3D Printing
Materials - Filament:'. N.p., 2015.
Web. 17 July 2015.
9 He, Jiankang et al. 'Custom Fabrication Of
A Composite Hemi―Knee Joint
Based On Rapid Prototyping'. Rapid
Prototyping Journal 12.4 (2006): 198-
205. Web.
10 Arduino.cc,. 'Servo Library'. N.p., 2015.
Web. 17 July 2015.
11 Brookshiresoftware.com,. 'Brookshire
Software - How Servos Work'. N.p.,
2015. Web. 17 July 2015.
12 Visualstudio.com,. 'Visual Studio -
Microsoft Developer Tools'. N.p.,
2015. Web. 17 July 2015.
13 Bargoud, Christopher et al. Brain-
Controlled Dexterous Upper Extremity
Prosthesis. 2015. Print.
14 Support.getmyo.com,. 'Welcome To Myo
Support'. N.p., 2015. Web. 18 July
2015.
15 Chapeskie, Jake. 'Myoduino'. Myo
Market. N.p., 2015. Web. 17 July 2015.
16 Singularity HUB,. 'How Much Is The
Newest Advanced Artificial Hand?
$11,000 USD (Video) - Singularity
HUB'. N.p., 2010. Web. 21 July 2015.
17 Dechev, N, W.L Cleghorn, and S
Naumann. 'Multiple Finger, Passive
Adaptive Grasp Prosthetic Hand'.
Mechanism and Machine Theory 36.10
(2001): 1157-1173. Web.
18 Bergman, K et al. 'Functional Benefit Of
An Adaptive Myoelectric Prosthetic
Hand Compared To A Conventional
Myoelectric Hand'. Digital Resource
Foundation for the Orthodics and
Prosthetics Community 16.1 (1992): n.
pag. Print
19 Dorman, Peter. Markets And Mortality.
Cambridge [England]: Cambridge
University Press, 1996. Print..
20 Baugher, John E., and J. Timmons
Roberts. 'Perceptions And Worry
About Hazards At Work: Unions,
Contract Maintenance, And Job
Control In The U.S. Petrochemical
Industry'. Industrial Relations 38.4
(1999): 522-541. Web.
21 Knight, Elizabeth B., Dawn N. Castillo,
and Larry A. Layne. 'A Detailed
Analysis Of Work-Related Injury
Among Youth Treated In Emergency
Departments'. American Journal of
Industrial Medicine 27.6 (1995): 793-
805. Web.
22 Marescaux, Jacques et al.
'Transcontinental Robot-Assisted
Remote Telesurgery: Feasibility And
Potential Applications'. Annals of
Surgery 235.4 (2002): 487-492. Web.
23 Schultz, Carl H., Kristi L. Koenig, and
Eric K. Noji. 'A Medical Disaster
Response To Reduce Immediate
Mortality After An Earthquake'. New
England Journal of Medicine 334.7
(1996): 438-444. Web.
24 Jain, Vivek, Rea Noponen, and Baird M.
Smith. 'Pediatric Surgical Emergencies
In The Setting Of A Natural Disaster:
Experiences From The 2001
Earthquake In Gujarat, India'. Journal
of Pediatric Surgery 38.5 (2003): 663-
667. Web.









![INDEX [microdentsystem.com] · 2015-11-24 · INDEX PRESENTATION. INTRODUCTION MULTIPLE PROSTHESIS. REMOVABLE AND IMMEDIATE PROSTHESIS. SINGLE PROSTHESIS CEMENTED PROSTHESIS. Microdent](https://img.pdfslide.us/doc/110x75/5facd9ee77a5ed547a36b19c/index-2015-11-24-index-presentation-introduction-multiple-prosthesis-removable.jpg)
![Intelligent Prosthesis - tams. · PDF fileI Electrooculography (EOG) I Electrocorticogram (EcoG) [ ] Irina Intelligent Prosthesis 4/21. ... Irina Intelligent Prosthesis 21/21](https://img.pdfslide.us/doc/110x75/5aab10c57f8b9aa9488b839d/intelligent-prosthesis-tams-electrooculography-eog-i-electrocorticogram-ecog.jpg)