Embed Size (px)
Citation preview

TEHNIČKI GLASNIK 13, 1(2019), 43-50 43
ISSN 1846-6168 (Print), ISSN 1848-5588 (Online) Original scientific paper https://doi.org/10.31803/tg-20190116100550
CONTROL OF A NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
Hassan ZARABADIPOUR, Zahra YAGHOUBI
Abstract: In this paper, the control of a mobile robot system via a feedback linearization controller and anti-control of chaos with parametric uncertainty is researched. Anti-control is also applied to convert non-chaotic systems to chaotic ones and to create chaos dynamic. The synchronization of system errors with a chaotic gyroscope system is researched for energy reduction and performance improvement. In the other words, control effort is based on synchronizing the error system with chaos for decreasing control cost. The combination of these techniques yields high efficiency and global convergence of trajectories, even in the presence of parametric uncertainty, which has been shown by simulation. Finally, the energy of control signals is calculated and compared for showing the energy reduction. Keywords: anti-control of chaos; feedback linearization controller; non-holonomic mobile robot; parametric uncertainty 1 INTRODUCTION
Recently, the controller of non-holonomic systems became a challenging area for engineers; however, a lot of work has been done in this field. Non-holonomic systems have non-holonomic constraints on velocities. Constraints are considered in wheeled mobile robots [1]. The control of a non-holonomic system is more difficult than that of a holonomic system. Non-holonomic control problems are studied in [2]. The time-varying adaptive control based on backstepping for uncertain non-holonomic chained systems was studied in [3]. There are two approaches for mobile robot control: one of them is stabilization and the other is trajectory tracking, which means the control of robots to track a desired trajectory. Many researchers pay attention to tracking [4-6]. The Lyapunov function is used for designing a tracking controller in [2]. Feedback linearization for tracking is studied in [7], backstepping in [8-9], the sliding mode control in [10], adaptive control in [11], fuzzy control in [12, 13], neural network control in [14], etc. The mechanical system is synchronized with a chaotic system to control the system in [15]. The chaotification or anti-control of chaos means that a non-chaotic system is to be chaotified. Recently, the application of chaos in control attracts a lot of attention. Some features, such as initial conditions and limitations, are creating complexity in chaotic systems. Due to the global stability of the chaos system, it is used in this paper, and errors of the states of the system are synchronized with a small ratio of the chaotic system, so that the states of the system can follow the reference path. In this paper, this concept of the anti-control of chaos is used, which refers to the synchronization of the error system with chaotic system. The gyroscope system is studied in several research papers because of its applications in navigational, aeronautical and space engineering [17, 18]. There are different types of the linear/nonlinear gyroscope which has periodic or chaotic motions [19, 20].
The organization of this paper is as follows: in section 2, the chaotic gyroscope system is introduced, in section 3, mobile robot dynamics are described, sections 4 and 5 deal with the feedback linearization controller for nonlinear systems and mobile robot, in section 6, the control of mobile robot systems with feedback linearization via the anti-control of chaos is researched, in section 7, the linearization controller for the mobile robot with parametric uncertainty is studied, the simulation results are provided in section 8 and finally, the conclusion is provided in the last section. 2 CHAOTIC GYROSCOPE SYSTEM
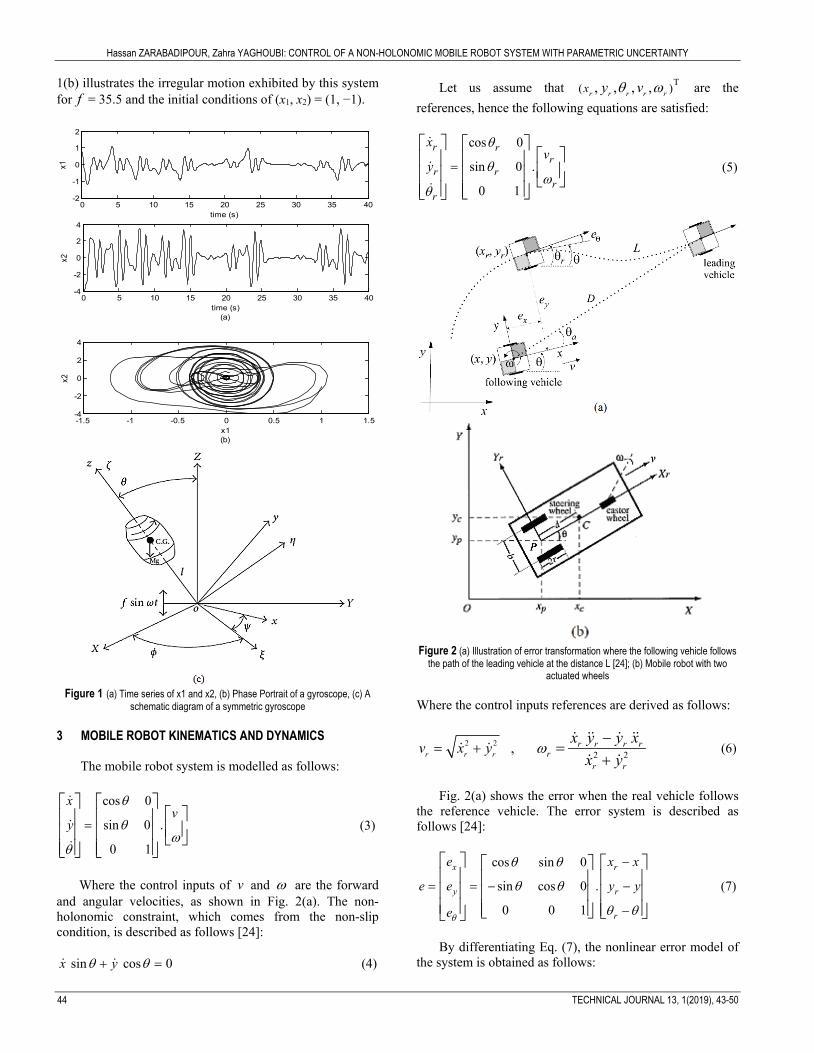
The gyroscope is modelled as follows and the scheme of it is shown in Fig. 1(c) [21]:
1 1 2
22 31 3
(1 cos )sin sin sin
sinc c f t
θθ α β θ θ θ ω θ
θ
−+ − + + = (1)
Where sinf tω is defined as parametric excitation, the linear
and nonlinear damping terms are 1cθ and, 32c θ and
2
2
1 13
(1 cos )sin
sin
θα β θ
θ
−− is a nonlinear force.
By giving 1 ,x θ= 2x θ= and 2
2
1 3
(1 cos )( )
sing
θθ α
θ
−= −
1sinβ θ− , Eq. (1) can be rewritten as follows:
1 2
3
2 1 1 2 2 2 1( ) sin sin( )
x x
x g x c x c x f t xω
=
= − − − +
(2)
Where the parameters are defined as follows: 32 < f < 36,
2
1α =100, 1β =1, 1c = 0.5, 2c = 0.05, and ω = 2. Fig. 1(a) and
Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF A NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
44 TECHNICAL JOURNAL 13, 1(2019), 43-50
1(b) illustrates the irregular motion exhibited by this system for f = 35.5 and the initial conditions of (x1, x2) = (1, −1).
Figure 1 (a) Time series of x1 and x2, (b) Phase Portrait of a gyroscope, (c) A
schematic diagram of a symmetric gyroscope 3 MOBILE ROBOT KINEMATICS AND DYNAMICS
The mobile robot system is modelled as follows:
cos 0
sin 0 .
0 1
xv
y
θ
θω
θ
=
(3)
Where the control inputs of v and ω are the forward
and angular velocities, as shown in Fig. 2(a). The non-holonomic constraint, which comes from the non-slip condition, is described as follows [24]:
sin cos 0x yθ θ+ = (4)
Let us assume that T( ), , , ,r r r r rx y vθ ω are the references, hence the following equations are satisfied:
cos 0
sin 0 .
0 1
r rr
r rr
r
xv
y
θ
θω
θ
=
(5)
Figure 2 (a) Illustration of error transformation where the following vehicle follows
the path of the leading vehicle at the distance L [24]; (b) Mobile robot with two actuated wheels
Where the control inputs references are derived as follows:
2 22 2,r r r
r r r rr
r r
v x yx y y x
x yω= +
−=
+
(6)
Fig. 2(a) shows the error when the real vehicle follows
the reference vehicle. The error system is described as follows [24]:
cos sin 0
sin cos 0 .
0 0 1
x r
y r
r
e x x
e e y y
eθ
θ θ
θ θ
θ θ
−
= = − −
−
(7)
By differentiating Eq. (7), the nonlinear error model of
the system is obtained as follows:
0 5 10 15 20 25 30 35 40-2
-1
0
1
2
time (s)
x1
0 5 10 15 20 25 30 35 40-4
-2
0
2
4
time (s)(a)
x2
-1.5 -1 -0.5 0 0.5 1 1.5-4
-2
0
2
4
x1(b)
x2

Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
TEHNIČKI GLASNIK 13, 1(2019), 43-50 45
cos 1sin 0
0 1
x r y
y r x
r
e v e ev
e v e e
e
θ
θ
θ
ωω
−
= + −
−
(8)
For the dynamic model, Eq. (9) is added to Eq. (3):
1 2
1 2
1( )
( )2
vm r
b
I r
τ τ
ω τ τ
= +
= −
(9)
Where m is the mass and I the moment inertia of mobile
robot with the radius of the rear wheels r and the length the between wheels b, 1τ and 2τ are the control torques of each rear wheel as it is shown in Fig. 2(b).
The error ( , , )x yTe e eθ converges to zero with control
laws for v andω , and this is a tracking control problem. 4 FEEDBACK LINEARIZATION CONTROLLER FOR MIMO
NONLINEAR SYSTEMS
The general system is considered as follows:
1
1
( ) .
[ , , ]
m
i ii
T
m
x f x g u
y h h
=
= +
=
∑
(10)
1
( ) ( )i
m
k f k g k ii
y L h L h u=
= +∑ (11)
kr is the relative degree and Lf (h) is the lie bracket [f, h].
For some i , 1( )) 0(i
kg k
rfL hL − ≠ .
( )J x is the decoupling matrix and the m×m matrix is defined as follows:
1 1
1
1
1 1
1 1
1 1
( )
( ( )) ( ( ))
( ( )) ( ( ))
m
m m
m
r r
g f g f
r r
g f m g f m
J x
L L h L L h
L L h L L h
− −
− −
=
(12)
Where rk is the relative degree, Lf(h) is the lie bracket
[f,h] and ( )J x is assumed to be non-singular. Let the m×1 be a vector yr:
1
1
1
m
m
r
r
r
rm
r
y
d ydt
d ydt
=
(13)
1
1( )
( )
( )m
rf
rf m
L h
l x
L h
=
(14)
Therefore,
( ) ( ), ry l x J x u v= + = (15)
Where ( )l x is the 1m× vector and v is the 1m× input. A decoupled set of equations are given as follows:
1
1
11
m
m
r
r
rm
mr
d yv
dtso y v
d yv
dt
=
⇔
=
(16)
The input v is designed by methods such as: pole
placement method, LQR, etc. For example,
0 1 2
( ) ( 1)1 0 0r r
r
v c y c y c y
y c y c y−−
= − − −
⇒ + + + =
(17)
The control, u, is given as:
1( )u J v l−= − (18) 5 FEEDBACK LINEARIZATION CONTROLLER FOR
MOBILE ROBOT The feedback linearization controller will be designed
for the system described by Eq. (3), as shown in Fig. 3.
Figure 3 Block diagram of the control system.
If we define 11y x= and 22y x= as outputs, then we have:

Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF A NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
46 TECHNICAL JOURNAL 13, 1(2019), 43-50
1
2
cos 0
sin 0
y v
y
θ
θ ω=
(19)
cos 0( )
sin 0J x
θ
θ=
is singular and its rank is one.
Let us suppose that 3 3 1 2, , .v x v x u uω= = = = The states have been extended as:
1 3
2 3
3 1
2
cos
sin
x x
x x
x v u
u
θ
θ
θ ω
=
=
= =
= =
(20)
Take 11y x= and 22y x= .
1 3 1
3 22
cos sin
sin cos
y x u
x uy
θ θ
θ θ
−=
(21)
The relative degree of the system is 2 and the matrix ( )J x is
3
3
cos sin( )
sin cos
xJ x
x
θ θ
θ θ
−=
, which is non-singular for 3 0.x ≠
Let us suppose
1 1
2 2
y V
y V
=
=
(22)
The control, u, is obtained as:
1 1 11
2 2 2
3 3
cos sin
( ) 1 1sin cos
u V VJ x
u V Vx x
θ θ
θ θ−= = −
(23)
Now (V1, V2)T can be obtained by using the pole
placement technique in Eq. (17) and 1v u= . It should be noted that, by using the pole placement
method, the mobile robot converges faster or more slowly to the desired path depending on the occasion of poles. 6 FEEDBACK LINEARIZATION CONTROLLER FOR A
MOBILE ROBOT BY USING THE ANTI-CONTROL OF CHAOS (CHAOTIFICATION) In this section, the errors of states track the chaotic
gyroscope system with a small amplitude, but in section 5, error signals are converged to zero, as shown in Fig. 4. The coefficient α is used to reduce the magnitude of chaotic
systems and 1010 1α− ≤ ≤ .
Figure 4 Block diagram of the control system
Thus, the error system in Eq. (8) is studied by using the feedback linearization technique. 1 yy e= and 2y eθ= are defined as outputs.
1
2
0
0 1
sinr
r
xy e v
y
v eθω ω
−=
−+
(24)
0( )
0 1xe
J x−
=−
with rank one is singular.
Let 41 4 2,, .v x x uu ω ω= = = = The states have been extended as:
1 4
4
4
4 2
cos
sinx r y
y r x
r
e v e u e x
e v e e x
e x
x u
θ
θ
θ ω
ω
= − +
= −
= −
= =
(25)
Assuming that 1 yy e= and 2y eθ= .
21 14 4 4
2 2
( 2 ) c o s s in
0 1x r r r y r
r
y ux e v x v e e x v e
uyθ θω
ω
− − + − += +
−
(26)
The relative degree of the system is 2 and the matrix ( )J x is
4( )0 1
xJ xx e
=−
−
that is non-singular for 4 0x ≠ , and
2
4 4( 2 ) cos sin( ) r r r y r
r
v x v e e x v el x θ θω
ω
− + − +=
The control, u, is obtained by using Eq. (22):
( )2
1 11
2 2
4
1 21 4 4 2
( ) ( )
( )
(2 )cos sin ( )
r
r r r y r x r
V
u VJ x l x
u V
xV v x v e e x v e e Vθ θ
ω
ω ω
−= + =
=
− −
+ − + − − −
(27)
Designing 1 2( , )TV V by using pole placement technique in Eq.
(17) and 2uω = .
Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
TEHNIČKI GLASNIK 13, 1(2019), 43-50 47
7 FEEDBACK LINEARIZATION CONTROLLER FOR A MOBILE ROBOT WITH PARAMETRIC UNCERTAINTY In this section, nonlinear control laws are proposed for
the control of the mobile robot motion described by Eq. (3) and Eq. (9). Feedback control for 1τ and 2τ in the presence of uncertainty in the parameter m is derived.
Assuming that 1y x= and 2y θ= . The relative degrees are 2 and the control signals without the anti-control of chaos are obtained as:
1 21
21 2
( sin )2 cos
( sin )2 cos
r m r IV v V
br m r I
V v Vb
ω θτ θτ
ω θθ
+ +
=
+ −
(28)
The control signals with the anti-control of chaos with the Eqs. (8) and (9) are obtained as Eq. (29):
2
1 21
221 2
( c o s s in 2 s in ) ( )( )2 2
( c o s s in 2 s in ) ( )( )2 2
r r r r x y r
r r r r x y r
r m r I r mV v e v e v e e e V
br m r I r m
V v e v e v e e e Vb
θ θ θ
θ θ θ
ω ω ω ωτ
τω ω ω ω
− − + − + − + −
=
− − + − + + − −
(29)
8 SIMULATION RESULTS 8.1 Control of the Mobile Robot
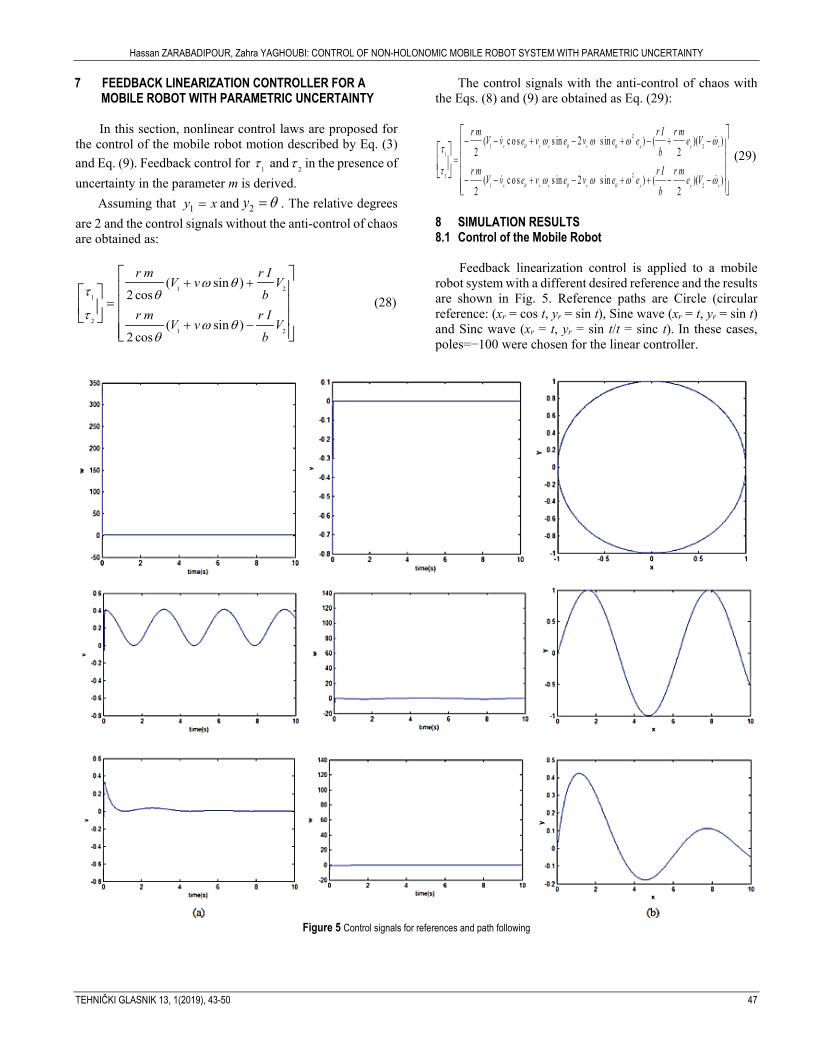
Feedback linearization control is applied to a mobile
robot system with a different desired reference and the results are shown in Fig. 5. Reference paths are Circle (circular reference: (xr = cos t, yr = sin t), Sine wave (xr = t, yr = sin t) and Sinc wave (xr = t, yr = sin t/t = sinc t). In these cases, poles=−100 were chosen for the linear controller.
Figure 5 Control signals for references and path following
Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF A NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
48 TECHNICAL JOURNAL 13, 1(2019), 43-50
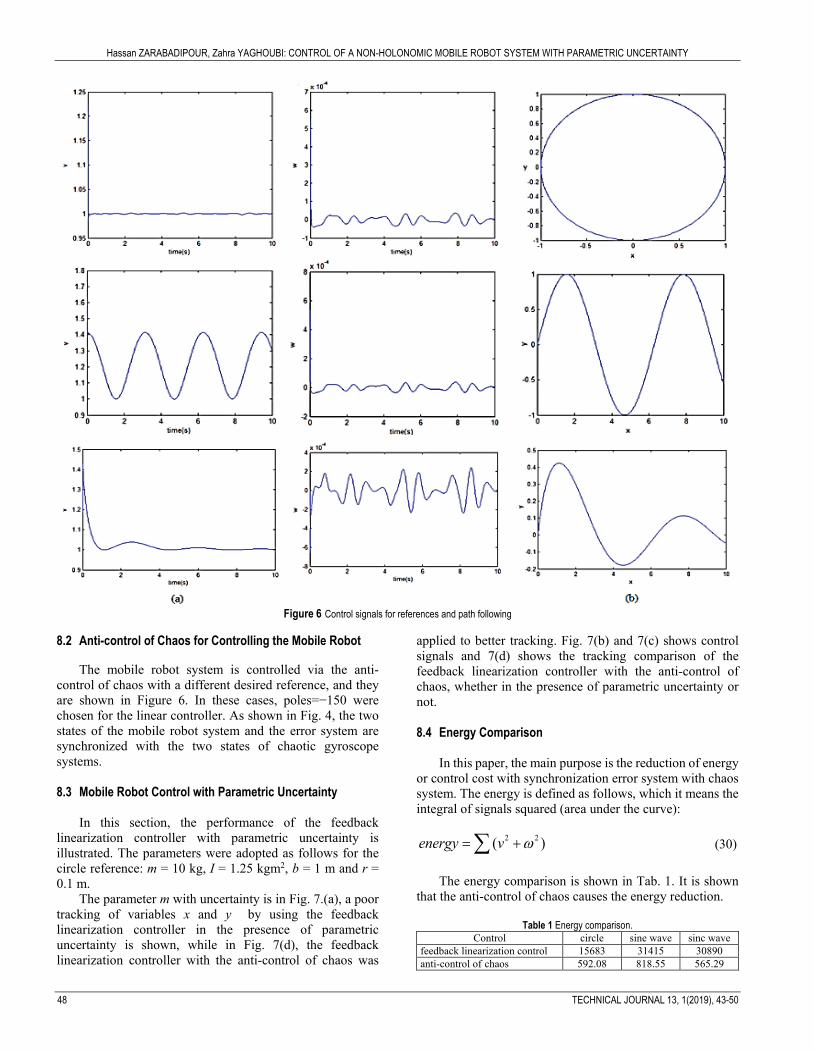
Figure 6 Control signals for references and path following
8.2 Anti-control of Chaos for Controlling the Mobile Robot
The mobile robot system is controlled via the anti-control of chaos with a different desired reference, and they are shown in Figure 6. In these cases, poles=−150 were chosen for the linear controller. As shown in Fig. 4, the two states of the mobile robot system and the error system are synchronized with the two states of chaotic gyroscope systems. 8.3 Mobile Robot Control with Parametric Uncertainty
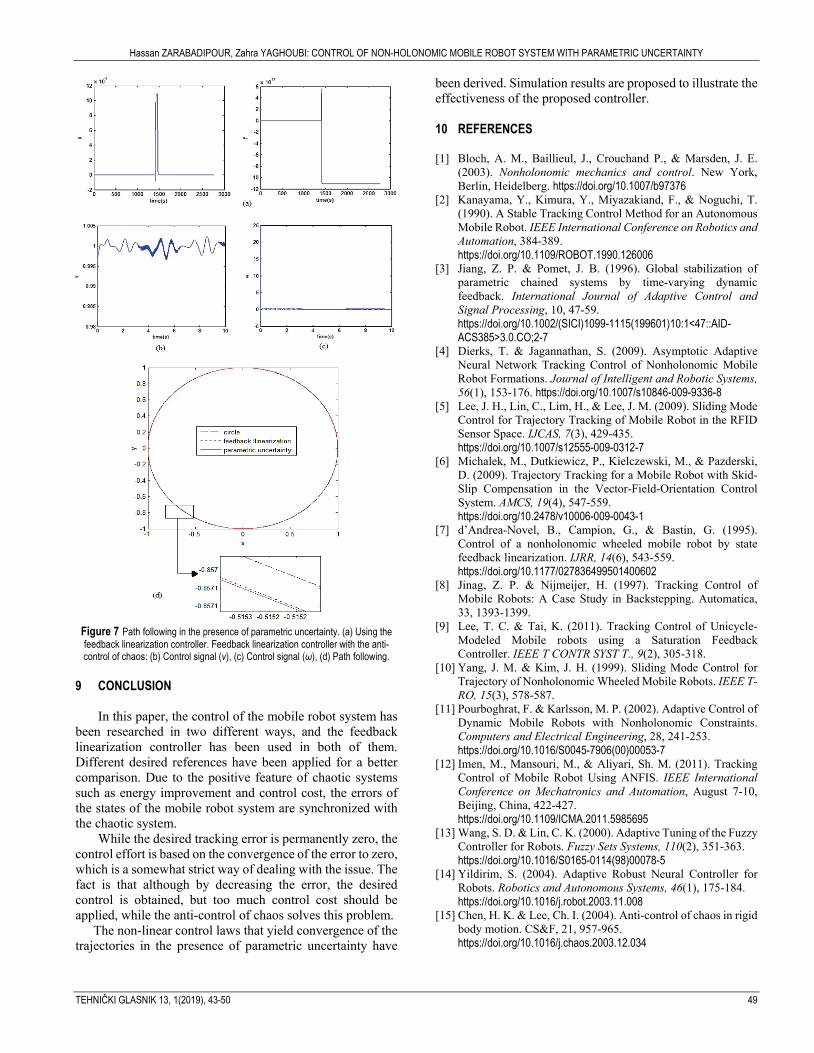
In this section, the performance of the feedback linearization controller with parametric uncertainty is illustrated. The parameters were adopted as follows for the circle reference: m = 10 kg, I = 1.25 kgm2, b = 1 m and r = 0.1 m.
The parameter m with uncertainty is in Fig. 7.(a), a poor tracking of variables x and y by using the feedback linearization controller in the presence of parametric uncertainty is shown, while in Fig. 7(d), the feedback linearization controller with the anti-control of chaos was
applied to better tracking. Fig. 7(b) and 7(c) shows control signals and 7(d) shows the tracking comparison of the feedback linearization controller with the anti-control of chaos, whether in the presence of parametric uncertainty or not. 8.4 Energy Comparison
In this paper, the main purpose is the reduction of energy or control cost with synchronization error system with chaos system. The energy is defined as follows, which it means the integral of signals squared (area under the curve):
2 2( )energy v ω= +∑ (30)
The energy comparison is shown in Tab. 1. It is shown that the anti-control of chaos causes the energy reduction.
Table 1 Energy comparison. Control circle sine wave sinc wave
feedback linearization control 15683 31415 30890 anti-control of chaos 592.08 818.55 565.29
Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
TEHNIČKI GLASNIK 13, 1(2019), 43-50 49
Figure 7 Path following in the presence of parametric uncertainty. (a) Using the feedback linearization controller. Feedback linearization controller with the anti-control of chaos: (b) Control signal (v), (c) Control signal (ω), (d) Path following.
9 CONCLUSION
In this paper, the control of the mobile robot system has been researched in two different ways, and the feedback linearization controller has been used in both of them. Different desired references have been applied for a better comparison. Due to the positive feature of chaotic systems such as energy improvement and control cost, the errors of the states of the mobile robot system are synchronized with the chaotic system.
While the desired tracking error is permanently zero, the control effort is based on the convergence of the error to zero, which is a somewhat strict way of dealing with the issue. The fact is that although by decreasing the error, the desired control is obtained, but too much control cost should be applied, while the anti-control of chaos solves this problem.
The non-linear control laws that yield convergence of the trajectories in the presence of parametric uncertainty have
been derived. Simulation results are proposed to illustrate the effectiveness of the proposed controller. 10 REFERENCES
[1] Bloch, A. M., Baillieul, J., Crouchand P., & Marsden, J. E.
(2003). Nonholonomic mechanics and control. New York, Berlin, Heidelberg. https://doi.org/10.1007/b97376
[2] Kanayama, Y., Kimura, Y., Miyazakiand, F., & Noguchi, T. (1990). A Stable Tracking Control Method for an Autonomous Mobile Robot. IEEE International Conference on Robotics and Automation, 384-389. https://doi.org/10.1109/ROBOT.1990.126006
[3] Jiang, Z. P. & Pomet, J. B. (1996). Global stabilization of parametric chained systems by time-varying dynamic feedback. International Journal of Adaptive Control and Signal Processing, 10, 47-59.
https://doi.org/10.1002/(SICI)1099-1115(199601)10:1<47::AID-ACS385>3.0.CO;2-7
[4] Dierks, T. & Jagannathan, S. (2009). Asymptotic Adaptive Neural Network Tracking Control of Nonholonomic Mobile Robot Formations. Journal of Intelligent and Robotic Systems, 56(1), 153-176. https://doi.org/10.1007/s10846-009-9336-8
[5] Lee, J. H., Lin, C., Lim, H., & Lee, J. M. (2009). Sliding Mode Control for Trajectory Tracking of Mobile Robot in the RFID Sensor Space. IJCAS, 7(3), 429-435.
https://doi.org/10.1007/s12555-009-0312-7 [6] Michalek, M., Dutkiewicz, P., Kielczewski, M., & Pazderski,
D. (2009). Trajectory Tracking for a Mobile Robot with Skid-Slip Compensation in the Vector-Field-Orientation Control System. AMCS, 19(4), 547-559.
https://doi.org/10.2478/v10006-009-0043-1 [7] d’Andrea-Novel, B., Campion, G., & Bastin, G. (1995).
Control of a nonholonomic wheeled mobile robot by state feedback linearization. IJRR, 14(6), 543-559.
https://doi.org/10.1177/027836499501400602 [8] Jinag, Z. P. & Nijmeijer, H. (1997). Tracking Control of
Mobile Robots: A Case Study in Backstepping. Automatica, 33, 1393-1399.
[9] Lee, T. C. & Tai, K. (2011). Tracking Control of Unicycle-Modeled Mobile robots using a Saturation Feedback Controller. IEEE T CONTR SYST T., 9(2), 305-318.
[10] Yang, J. M. & Kim, J. H. (1999). Sliding Mode Control for Trajectory of Nonholonomic Wheeled Mobile Robots. IEEE T-RO, 15(3), 578-587.
[11] Pourboghrat, F. & Karlsson, M. P. (2002). Adaptive Control of Dynamic Mobile Robots with Nonholonomic Constraints. Computers and Electrical Engineering, 28, 241-253.
https://doi.org/10.1016/S0045-7906(00)00053-7 [12] Imen, M., Mansouri, M., & Aliyari, Sh. M. (2011). Tracking
Control of Mobile Robot Using ANFIS. IEEE International Conference on Mechatronics and Automation, August 7-10, Beijing, China, 422-427.
https://doi.org/10.1109/ICMA.2011.5985695 [13] Wang, S. D. & Lin, C. K. (2000). Adaptive Tuning of the Fuzzy
Controller for Robots. Fuzzy Sets Systems, 110(2), 351-363. https://doi.org/10.1016/S0165-0114(98)00078-5 [14] Yildirim, S. (2004). Adaptive Robust Neural Controller for
Robots. Robotics and Autonomous Systems, 46(1), 175-184. https://doi.org/10.1016/j.robot.2003.11.008 [15] Chen, H. K. & Lee, Ch. I. (2004). Anti-control of chaos in rigid
body motion. CS&F, 21, 957-965. https://doi.org/10.1016/j.chaos.2003.12.034
Hassan ZARABADIPOUR, Zahra YAGHOUBI: CONTROL OF A NON-HOLONOMIC MOBILE ROBOT SYSTEM WITH PARAMETRIC UNCERTAINTY
50 TECHNICAL JOURNAL 13, 1(2019), 43-50
[16] Chen, G. & Dong, X. (1988). From chaos to order: Perspectives, methodologies and applications. World Scientific, Singapore, 50-51.
[17] Chen, H. K. (2002). Chaos and chaos synchronization of a symmetric gyro with linear-plus-cubic damping. JSV, 255(4), 719-740. https://doi.org/10.1006/jsvi.2001.4186
[18] Farivar, F., Aliyari, Sh, M., Nekoui, M. A., & Teshnehlab, M. (2012). Chaos control and generalized projective synchronization of heavy symmetric chaotic gyroscope systems via Gaussian radial basis adaptive variable structure control. CS&F, 45, 80-97.
https://doi.org/10.1016/j.chaos.2011.10.008 [19] Ge, Z. M. (2002). Chaos control for rigid body systems. Taipei.
GauLih Book Company. [20] Lei, Y., Xu, W., & Zheng, H. (2005). Synchronization of two
chaotic nonlinear gyros using active control. Physics Letters A. 343, 153-158. https://doi.org/10.1016/j.physleta.2005.06.020
[21] Farivar, F., Aliyari, Sh. M., Nekoui, M. A., & Teshnehlab, M. (2009). Chaos synchronization of uncertain nonlinear gyros via hybrid control. IEEE/ASME international conference on advanced intelligent mechatronics, 1365-1370.
https://doi.org/10.1109/AIM.2009.5229879 [22] Yau, H. T. (2008). Synchronization and anti-synchronization
coexist in twodegree- of-freedom dissipative gyroscope with nonlinear inputs. Nonlinear Analysis Real World Applications, 9(5), 2253-2261.
https://doi.org/10.1016/j.nonrwa.2007.08.002 [23] Van, D. R. & Chen, H. K. (2003). Chaos and chaos
synchronization of a symmetric gyro with linear-plus-cubic damping. JSV, 268(3), 632-636.
https://doi.org/10.1016/S0022-460X(03)00343-2 [24] Klančar, G., Matko, D., & Blažič, S. (2010). A control strategy
for platoons of differential drive wheeled mobile robot. RAS, 59, 57-64.
Authors’ contacts: Hassan ZARABADIPOUR, PhD, Associate Professor Department of Electrical Engineering Imam Khomeini International University Qazvin, Iran [email protected] Zahra YAGHOUBI, M.Sc. Department of Electrical Engineering Imam Khomeini International University, Qazvin, Iran [email protected]




























