Embed Size (px)
Citation preview
Univ logo
Control of a Multi Function Wheelchair
for Disabled/Elderly Mobility
Nor Maniha Abdul Ghani
Dr. Osman Tokhi
Department of Automatic Control and Systems Engineering
The University of Sheffield
UKACC PhD Presentation Showcase
Univ logo Slide 2
Introduction/Problems
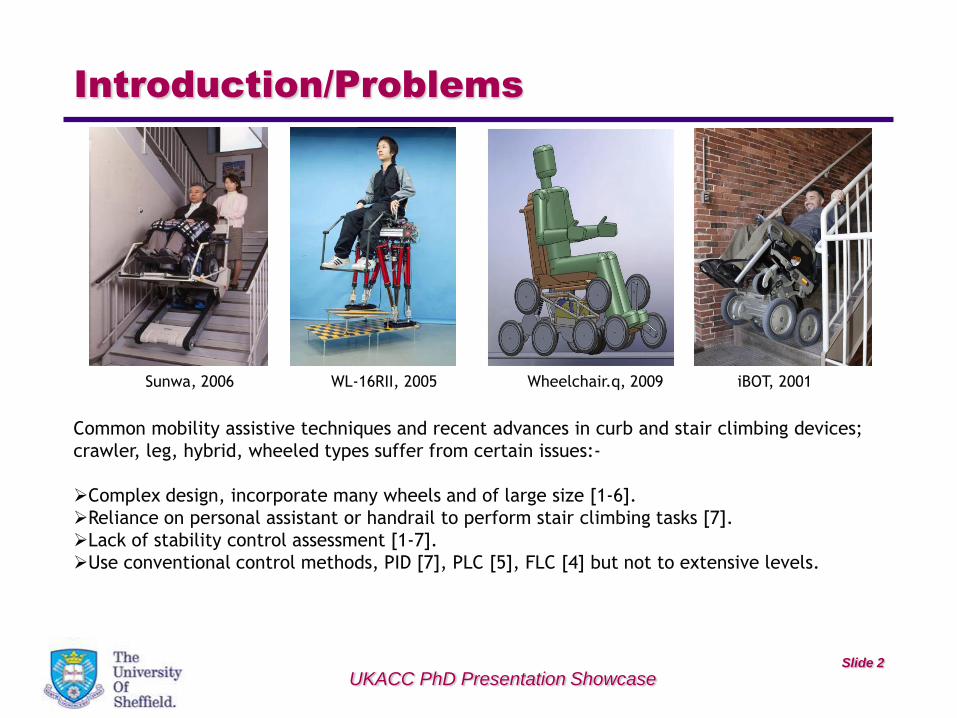
Common mobility assistive techniques and recent advances in curb and stair climbing devices;
crawler, leg, hybrid, wheeled types suffer from certain issues:-
Complex design, incorporate many wheels and of large size [1-6].
Reliance on personal assistant or handrail to perform stair climbing tasks [7].
Lack of stability control assessment [1-7].
Use conventional control methods, PID [7], PLC [5], FLC [4] but not to extensive levels.
Sunwa, 2006 WL-16RII, 2005 Wheelchair.q, 2009 iBOT, 2001
UKACC PhD Presentation Showcase
Univ logo Slide 3
Objectives/Methodology
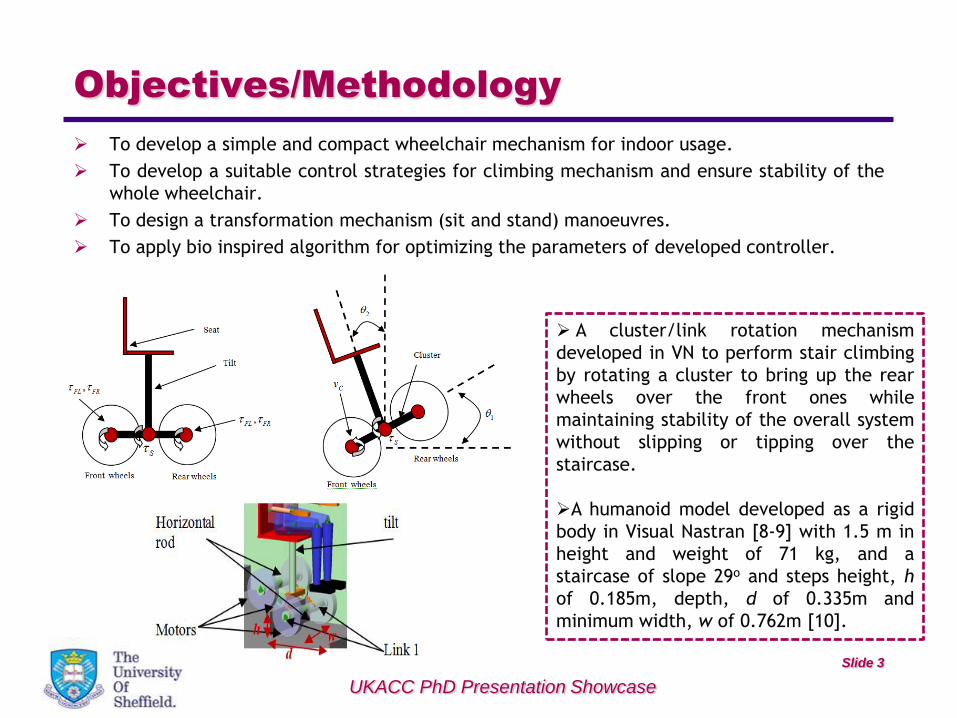
To develop a simple and compact wheelchair mechanism for indoor usage.
To develop a suitable control strategies for climbing mechanism and ensure stability of the
whole wheelchair.
To design a transformation mechanism (sit and stand) manoeuvres.
To apply bio inspired algorithm for optimizing the parameters of developed controller.
A cluster/link rotation mechanism
developed in VN to perform stair climbing
by rotating a cluster to bring up the rear
wheels over the front ones while
maintaining stability of the overall system
without slipping or tipping over the
staircase.
A humanoid model developed as a rigid
body in Visual Nastran [8-9] with 1.5 m in
height and weight of 71 kg, and a
staircase of slope 29o and steps height, h
of 0.185m, depth, d of 0.335m and
minimum width, w of 0.762m [10].
UKACC PhD Presentation Showcase
Univ logo Slide 4
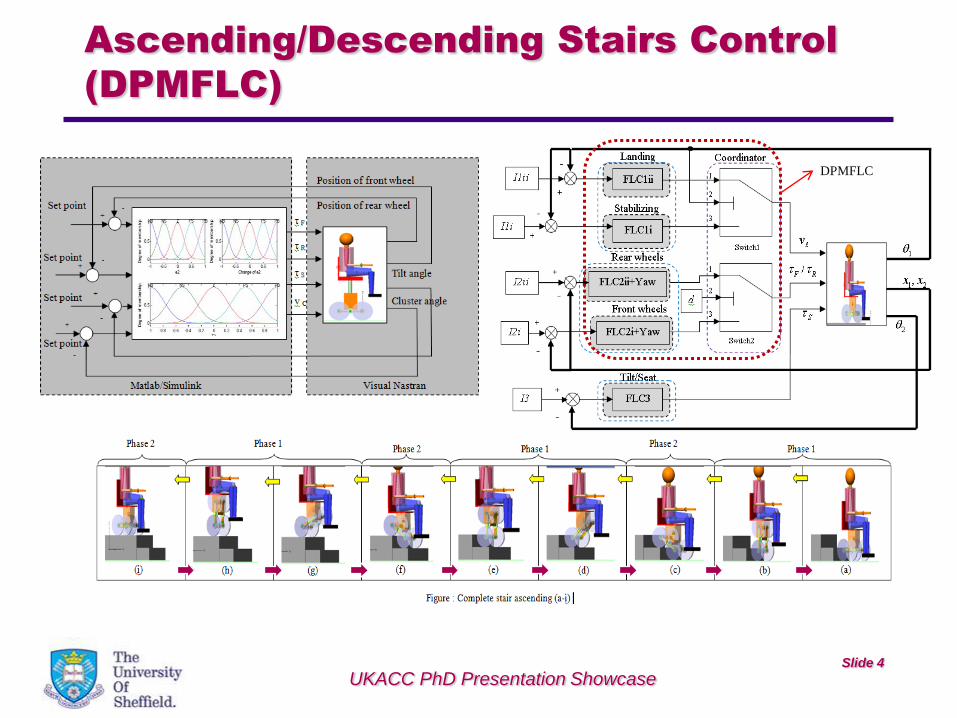
Ascending/Descending Stairs Control
(DPMFLC)
DPMFLC
UKACC PhD Presentation Showcase
Univ logo
0 1 2 3 4 5 6-100
-50
0
50
100
Time (s)
Ang
ular
pos
ition
of
link
for 1
st s
tep
(deg
ree)
0 1 2 3 4 5 6-200
-100
0
100
200
Time (s)
Ang
ular
pos
ition
of
link
for 2
nd s
tep
(deg
ree)
0 1 2 3 4 5 6-3
-2
-1
0
1
Time (s)
Tilt
angl
e (d
egre
e)
+1000N
-1000N
undisturbed
+1000N
-1000N
undisturbed
+1000N
-1000N
undisturbed
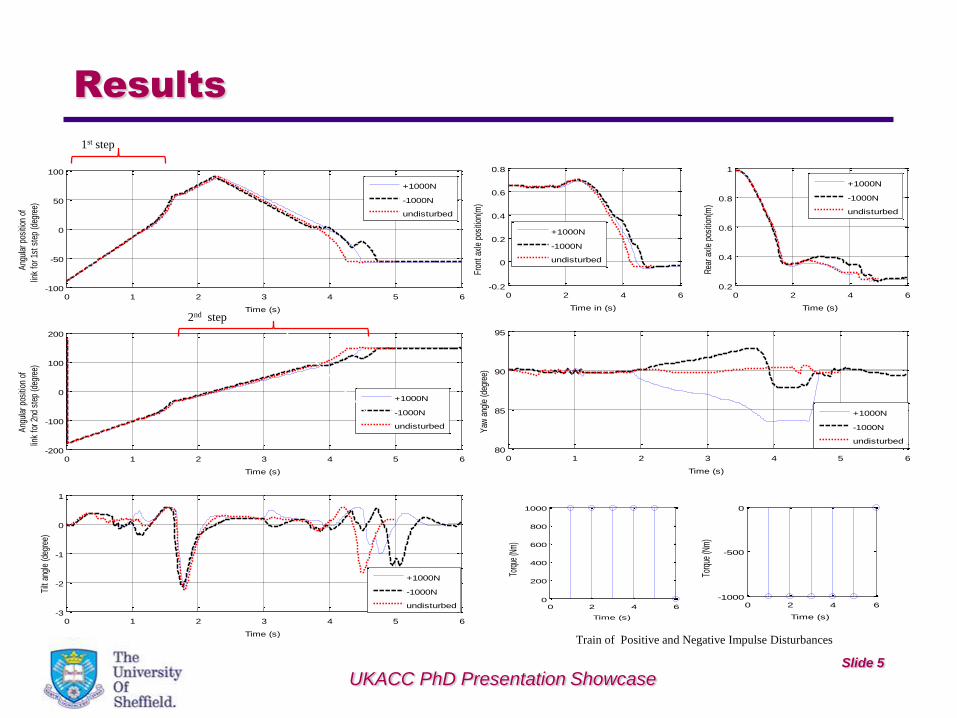
Results
Slide 5
1st step
2nd step
0 2 4 60
0.1
0.2
0.3
0.4
Time (s)
Dis
tanc
e1
(m)
0 2 4 60
0.1
0.2
0.3
0.4
0.5
Time (s)
Dis
tanc
e2
(m)
0 2 4 6-0.2
0
0.2
0.4
0.6
0.8
Time in (s)
Fron
t axl
e po
sitio
n(m
)
0 2 4 60.2
0.4
0.6
0.8
1
Time (s)
Rea
r axl
e po
sitio
n(m
)
0 1 2 3 4 5 680
85
90
95
Time (s)
Yaw
ang
le (d
egre
e)
+1000N
-1000N
undisturbed
+1000N
-1000N
undisturbed
+1000N
-1000N
undisturbed
0 2 4 60
200
400
600
800
1000
Time (s)
Torq
ue (N
m)
0 2 4 6-1000
-500
0
Time (s)
Torq
ue (N
m)
Train of Positive and Negative Impulse Disturbances
UKACC PhD Presentation Showcase
Univ logo Slide 6
Conclusion & Future Work
Conclusion A DPMFLC has been implemented to perform stair ascending/descending
task with an automatic mode wheelchair system.
It has been demonstrated that the control system is able to perform
effectively in order to ensure stability of the maneuvering tasks.
The designed controller is robust to positive and negative impulse
disturbances.
Future Work Transform the wheelchair from sitting to standing position.
Investigate bio-inspired optimization to optimize the parameter of
developed controller.
UKACC PhD Presentation Showcase
Univ logo
References
Slide 7
[1] Sunwa Co.Ltd (2006). (1st April 2012), [Available from] http://www.sunwa-jp.co.jp/en/accessibility/.
[2] Top Chair, (2003). The first stair-climbing powered wheelchair, (1st April 2012), [Available from]
http://www.topchair.fr/.
[3] Lawn, M. J., Sakai, T., Kuroiwa, M. & Ishimatsu, T. (2001). Development and practical application of a stair
climbing wheelchair in Nagasaki. Journal of HWRS-ERC, 2, 33-39.
[4] Teng, Y., Wang, T., Yao, C. & Li, X. (2010). The Research of Tension Optimal Estimation and Stair-Climbing
Ability of Transformation Wheelchair Robot. Proceeding of 29th Chinese Control Conference, 3716-3721.
[5] Noborot (2012). Robotic vehicle could lead to stair-climbing wheelchair by 2017, (6th November 2012),
[Available from] http://www.gizmag.com/nororot-stair-climbing-robotic-vehicle/24878/ .
[6] Nakajima, S. (2010). Proposal for step-up gait of RT-Mover, a four wheel-type mobile robot for rough terrain
with simple leg mechanism. Proceeding of IEEE International Conference on Robotics and Biomimetics, 351-
356.
[7] Johnson & Johnson Company (2001): Independence Ibot mobility system. Johnson & Johnson Company.
http://www.ibotnow.com/index.html. Accessed 1 April 2012.
[8] Wang, S.L. (2001). Motion simulation with working model 2D and MSC. Visual Nastran 4D. J. Comput. Soft.
Engin. 1 (2), 193-196.
[9] Winter, D.A. (1990). Biomechanics and Motor Control of Human Movement. Wiley-Interscience, New York.
[10] Canadian Centre For Occupational Safety And Health ( 2010). (28thNovember 2012), [Available from]
http://www.ccohs.ca/oshanswers/safety_haz/stairs_fallprevention.html
...Q&A UKACC PhD Presentation Showcase





























