Embed Size (px)
Citation preview

Control Design to Reduce the Effects of Torsional Resonance in Coupledof Torsional Resonance in Coupled
Systems
By Daniel LofaroAdvisors:Dr. Tom ChmielewskiDr. Paul Kalata
1

Contents of Presentation
System Exhibiting Torsional Resonance (TR)ObjectiveObjectivePrimary methods of TR reduction (Industry)Designs to be Consideredg
– Resonance Equalization (RE) [1] – Linear Control– Sliding Mode Control (SMC) – Non-Linear Control
Control Design ConclusionControl Design ConclusionTR Test Rig DesignConclusion
2

System Exhibiting Torsional Resonance
System With Out TR System With TR
3

System Exhibiting Torsional Resonance
4

System Exhibiting Torsional Resonance
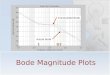
20Bode Diagram
(dB
)
(dB
)
20Bode Diagram
( )( )
a sT sθ
-60
-40
-20
0
Mag
nitu
de (d
B)
Mag
nitu
de (
Mag
nitu
de (
-60
-40
-20
0
Mag
nitu
de (d
B)
-80
-90
-45
0
ase
(deg
)
e (d
eg)
M
e (d
eg)
M -80
180
180.5
181
ase
(deg
)
101
102
103
-180
-135Pha
Frequency (rad/sec)
Pha
se
Pha
se
Desired System10
110
210
3179
179.5Pha
Frequency (rad/sec)
System With TR
5
Desired System( )( )
a sT sθ
System With TR( )( )
a sT sθ

System Exhibiting Torsional Resonance
B)
1
Anti-Resonant Frequency:
40
-20
0
20
gnitu
de (d
B)
Bode Diagram
Wr
Ja
delta dB
gnitu
de (d
B12
[1]car
L
KwJ
⎛ ⎞= ⎜ ⎟⎝ ⎠
-80
-60
-40
Mag
-45
0
g)
TR SystemOnly JaJL+Ja
JL+Ja
War
deg)
M
ag1
Resonance Frequency:
⎛ ⎞
101
102
103
-180
-135
-90
Phas
e (d
eg
Frequency (rad/sec)
Pha
se (d2
[1]cr
KwJ J
⎛ ⎞⎜ ⎟⎜ ⎟= ⎜ ⎟⎛ ⎞
6a L
a L
J JJ J
⎜ ⎟⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟+⎝ ⎠⎝ ⎠
System With TR( )( )
a sT sθ

System Exhibiting Torsional Resonance
Decreases Gain MarginG i S ti B
)
Gain SeparationSwitching Effect
40
-20
0
20
gnitu
de (d
B)
Bode Diagram
Wr
Ja
delta dB
gnitu
de (d
B1040log r
ar
dB ωω⎛ ⎞
Δ = ⎜ ⎟⎝ ⎠[14]
-80
-60
-40
Mag
-45
0
g)
TR SystemOnly JaJL+Ja
JL+Ja
War
deg)
M
agar⎝ ⎠[14]
101
102
103
-180
-135
-90
Phas
e (d
eg
Frequency (rad/sec)
Pha
se (d
7System With TR
( )( )
a sT sθ

System Exhibiting Torsional Resonance
Decreases Gain MarginG i S ti B
)
Gain SeparationSwitching Effect
40
-20
0
20
gnitu
de (d
B)
Bode Diagram
Wr
Ja
delta dB
gnitu
de (d
B– Pre-TR
( ) ( ) 1a La J J sθ + =
-80
-60
-40
Mag
-45
0
g)
TR SystemOnly JaJL+Ja
JL+Ja
War
deg)
M
ag
– Post-TR
( ) 2( ) a LT s J J s=
+
( ) 1θ10
110
210
3-180
-135
-90
Phas
e (d
eg
Frequency (rad/sec)
Pha
se (d
8( )
2
( ) 1( )aa J
a
sT s J s
θ= System With TR
( )( )
a sT sθ

System Exhibiting Torsional Resonance
20Bode Diagram
B)
-40
-20
0
Mag
nitu
de (d
B)
nitu
de (d
B
-80
-60
M
0
TR Mag ChangedB
)
Mag
-135
-90
-45
Phas
e (d
eg)
TR Phase Changedeg
hase
(deg
910
110
210
3-180
Frequency (rad/sec)
Ph

System Exhibiting Torsional Resonance
Coupler
Motor / Actuator
Inertial Disc / Load
10

S t E hibiti T i lSystem Exhibiting Torsional Resonance
Differential Equations for a System Exhibitingfor a System Exhibiting Torsional Resonance Coupler
•• • •
( ) ( ) ( )a a a c a c a c L c LT t J B B K K Bθ θ θ θ θ•• • •
= + + + − +
0 ( ) ( )L L L c L c L c a c aJ B B K K Bθ θ θ θ θ•• • •
= + + + − +Motor / Actuator
Inertial Disc / Load
11

S t E hibiti T i lSystem Exhibiting Torsional Resonance
Input:T B K B K− −⎡ ⎤
⎡ ⎤– Torque
Output– Actuator Angular
1
1 0 0 00 ( )
c c c c
a a a aa aa
a a
B K B KJ J J J
JT t
B K B K
θ θθ θθ θ
⎡ ⎤⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= +⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
&& &
&
&& &gPosition (θa) 0
00 0 1 0
c c c cL L
L L L LL L
B K B KJ J J J
θ θθ θ
⎢ ⎥ ⎢ ⎥− − ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
&
[ ]( ) 0 1 0 0
a
a
L
y t
θθθ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥
&
&
12
L
Lθ⎢ ⎥⎢ ⎥⎣ ⎦

System Exhibiting Torsional Resonance
Controllability Matrix Observability Matrix
1
00
aJB
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥
[ ]0 1 0 0C
CCA
Ob
=
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥
2 3
00
434.78 945.18 1.04 7 7.67 70 434 78 945 18 1 04 7
Co B AB A B A B
E EE
⎢ ⎥⎢ ⎥⎣ ⎦⎡ ⎤= ⎣ ⎦
− −⎡ ⎤⎢ ⎥− −⎢ ⎥
2
3
0 1 0 01 0 0 0
2 17 2 39 4 2 17 2 39 4
ObCACA
ObE E
⎢ ⎥⎢ ⎥⎣ ⎦⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥0 434.78 945.18 1.04 7
0 658.76 7.24 6 5.35 70 0 658.76 7.24 6
( ) 4
ECo
E EE
Rank Co
⎢ ⎥=⎢ ⎥−⎢ ⎥⎣ ⎦
=
2.17 2.39 4 2.17 2.39 42.39 4 8.82 4 2.38 4 8.82 4
( ) 4
E EE E E E
Rank Ob
⎢ ⎥− −⎢ ⎥− −⎣ ⎦
=
13 Values for all constants can be found in Table 1 and Table 2 of the thesis

System Exhibiting Torsional Resonance
Fully Observable:– Angular Position of Actuator as the Output– Angular Position of Load as the Output
Not Fully Observable:Angular Velocity of Actuator as the Output– Angular Velocity of Actuator as the Output
– Angular Velocity of Load as the Output
14

System Exhibiting Torsional Resonance
Input: Torque, Tin
A t t O t t θActuator Output: θa
Load Output: θL
1 ( )
( ) ( )
2
2 2
1( )( ) 1
L c ca a L
c a c L c a c La L a L
s J K sBs J J
T s ss s B J B J K J K JJ J J J
θ+ +
=⎛ ⎞
+ + + +⎜ ⎟⎝ ⎠
( )
( ) ( )2 2
1( )( ) 1
c ca LL
c a c L c a c La L a L
K sBJ Js
T s ss s B J B J K J K JJ J J J
θ+
=⎛ ⎞
+ + + +⎜ ⎟⎝ ⎠
15 Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

System Exhibiting Torsional Resonance
( )21( )( ) 1
L c ca a L
s J K sBs J J
T s sθ
+ +=
⎛ ⎞( ) ( )2 2( ) 1c a c L c a c L
a L a L
T s ss s B J B J K J K JJ J J J
⎛ ⎞+ + + +⎜ ⎟
⎝ ⎠
1 ( )
( ) ( )2 2
1( )( ) 1
c ca LL
K sBJ Js
T s sB J B J K J K J
θ+
=⎛ ⎞⎜ ⎟
16( ) ( )2 2( )
c a c L c a c La L a L
s s B J B J K J K JJ J J J
+ + + +⎜ ⎟⎝ ⎠

System Exhibiting Torsional Resonance
Open Loop Poles:0 0 -1 845±j210 44 300
Pole/Zero Plot
– 0, 0, -1.845±j210.44Open Loop Zeros
– -0.76±j126.10100
200
300
Double Pole
-100
0
Imag
inar
y Ax
is( )
( ) ( )
2
2 2
1( )( ) 1
L c ca a L
L L
s J K sBs J J
T s ss s B J B J K J K J
θ+ +
=⎛ ⎞
+ + + +⎜ ⎟
System is Marginally Stable -2.5 -2 -1.5 -1 -0.5 0 0.5 1-300
-200
Real Axis
( ) ( )c a c L c a c La L a L
s s B J B J K J K JJ J J J
+ + + +⎜ ⎟⎝ ⎠
17 Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

System Exhibiting Torsional Resonance
Relationship between θ and θθa and θL
2a L a c c
L c c
s J sB K sBK sB
θθ
⎛ ⎞+ + += ⎜ ⎟+⎝ ⎠
18 Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

System Exhibiting Torsional Resonance
Bode Diagram20
M it d
-80
-60
-40
-20
0
Mag
nitu
de (d
B)
Load
Actuator
war
wrMagnitude
(dB)
270
360
eg)
-120
-100
LoadActuator
Load
ActuatorPhase
101
102
103
0
90
180
Phas
e (d
e
F ( d/ )
Load
(deg)
19
Frequency (rad/sec)
Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

System Exhibiting Torsional Resonance
Torque Input Angular Velocity Output on Actuator Shaft with( )θ on Actuator Shaft with and with out TR
( )( )
a sT sθ
20 Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

System Exhibiting Torsional Resonance
Angular Velocity Output on Actuator Shafton Actuator Shaft
– System With TR (Yellow)– System Without TR (Purple)
( )θ ( )( )
a sT sθ
21

System Exhibiting Torsional Resonance
Root Locus of Closed Loop System Containing p y gTR with negative Feedback
22 Assumptions: Kc>0, Bc>0, Ja>0, JL>0, Ba=0, BL=0

Objective
Primary:– Design a linear controller to reduce the effects of
TR, on a mechanically coupled system, using V.Rizzo’s Resonance Equalization [1] methodV.Rizzo s Resonance Equalization [1] method
Extension:– Design a non-linear controller to reduce the g
effects of TR using Sliding Mode Control (SMC)– Implement controllers on physical system
23

Torsional Resonance (TR) Overview: TR Reduction
Primary Methods of TR Reduction– Reducing Bandwidth– Increase Coupler’s Spring Constant
N t h Filt– Notch Filters– Addition of Damping
24

Torsional Resonance (TR) Overview: TR Reduction - Reducing Bandwidth
Reducing BandwidthPPro
– Low Cost– Effective
agni
tude
(dB
)Con
– Reduction in BandwidthSl R e
(deg
)
Ma
– Slower Response
Theta_abutter
Pha
se
25Theta _L
2 Theta _a1
TR System
T
Theta_L
Low Pass FilterGain
KpU1

Torsional Resonance (TR) Overview: TR Reduction – Increase Coupler’s Spring Constant
20Bode Diagram
Stiffer and higher quality parts such as anti-backlash
h th i
-60
-40
-20
0
20
Mag
nitu
de (d
B)
K =55
gears push the spring constant upPro
– Increase TR Frequencies nitu
de (d
B)
-100
-80
-45
0
deg)
K
c=55
Kc=110
Kc=110Kc=55q
– Increase Useable Bandwidth
ConIncreases Cost de
g)
Mag
n
101
102
103
-180
-135
-90
Phas
e (d
Frequency (rad/sec)
– Increases Cost– Low Return Cost
Doubling KcLess Than Doubled wr
Pha
se (d
26

Torsional Resonance (TR) Overview: TR Reduction – Notch Filter
P
Notch Filter Designed to Remove wr
Pro– Reduces the effects
of TR -50
0
50
Mag
nitu
de (d
B)
Bode Diagram
LoadActuatorActuator (No Filter)
War
Wr
Actuator (No Filter)
Actuator
nitu
de (d
B)
– Low Cost
ConIneffective if TR
-150
-100
M
0
180
360
e (d
eg)
ar
Load
deg)
M
agn
– Ineffective if TR changes
101
102
103
-540
-360
-180Ph
ase
Frequency (rad/sec)
Theta_abutter
Pha
se (d
27Theta _L
2 Theta _a1
TR System
T
Theta_L
Notch FilterGain
KpU1

Torsional Resonance (TR) Overview: TR Reduction – Addition of Damping
Addition of DampingP
Bode Diagram
Pro– Low Cost– Effective -40
-20
0
20
Mag
nitu
de (d
B)
System: Gtf6Frequency (rad/sec): 203Magnitude (dB): -28.5
System With Out DampingSystem With Damping
System without Damping
gnitu
de (d
B)
Con– Does Not Reduce ΔdB
-80
-60System: Gtf6Frequency (rad/sec): 130Magnitude (dB): -47.3
-45
0
System with Damping
eg)
Mag
101
102
103
-180
-135
-90
Phas
e (d
eg)
Pha
se (d
28
Frequency (rad/sec)

D i t b C id dDesigns to be Considered:
Designs to be Considered
– Resonance Equalization (RE) [1] – Linear Control
– Sliding Mode Control (SMC)- Non-Linear Control
29

D i t b C id dDesigns to be Considered: Resonance Equalization
W. J. Bigley and V. Rizzo presented a t h i f th d ib it “ li i titechnique for, as they describe it, “eliminating the destabilizing effect of mechanical resonance in feedback control systems ”resonance in feedback control systems. [1][16]Linear ControlLinear ControlMethod: Resonance Equalization (RE)
30

D i t b C id dDesigns to be Considered: Resonance Equalization
Current at Maximum Velocity is at a Minimum
nitu
de (d
B)
[1]
M
agn
Phas
e (d
eg)
31 Velocity Current
P

D i t b C id d( )a sθ
Designs to be Considered: Resonance Equalization
( )( )
a
inV s
DC Motor Design DC Motor Bode Plot
20
30Bode Diagram
[15]
10
0
10
gnitu
de (d
B)
-30
-20
-10M
ag
3210
110
210
310
4-40
Frequency (rad/sec)

D i t b C id dDesigns to be Considered: Resonance Equalization
V.Rizzo’s Resonance Equalized Rate Loop [1]
DC Motor
33 Resonance Equalization

D i t b C id dDesigns to be Considered: Resonance Equalization
Open Loop With O t RE
Open Loop With REWith Out RE With RE
nitu
de (d
B)
ude
(dB
)
(deg
) M
agn
eg)
Mag
nitu
Phas
e (
Phas
e (d
e
34( )( )
a
in
sV sθ ( )
( )a
in
sV sθ

D i t b C id dDesigns to be Considered: Resonance Equalization
Open Loop With RE
ude
(dB
)
de (d
B)
eg)
Mag
nitu
g)
Mag
nitu
Phas
e (d
e
Phas
e (d
eg
35( )( )
a
in
sV sθ ( )
( )a
in
sV sθ

D i t b C id dDesigns to be Considered: Resonance Equalization
36 Unity Gain Closed Loop With Kp=50

D i t b C id dDesigns to be Considered: Resonance Equalization
Closed LoopWith O t RE
Closed LoopWith RE– With Out RE – With RE
tude
(dB
)
ude
(dB
)
deg)
M
agni
t
eg)
Mag
nitu
Phas
e (d
Phas
e (d
e
37 Unity Gain Closed Loop With Kp=50

D i t b C id dDesigns to be Considered: Resonance Equalization
Closed LoopWith RE– With RE
tude
(dB
)
ude
(dB
)
deg)
M
agni
t
eg)
Mag
nitu
Phas
e (d
Phas
e (d
e
38 Unity Gain Closed Loop With Kp=50

D i t b C id dDesigns to be Considered: Resonance Equalization
R ti JΔ dB
O L Δ dB RETR Mag Ch
TR Phase ChRatio
(JL:Ja)JL
oz-in-sec2Open Loop
(dB)Δ dB RE
(dB)Change
(dB)Change
(deg)100 0.23 40.1 0 12.53 82.1
10 0.023 20.8 0.4 2.5 18.22 0.0046 9.5 0.5 0.4 4.6
1.435 0.0033 7.7 0.3 0.2 3.50.5 0.00115 3.5 0.5 0.1 1.60.1 0.00023 0.8 0 0 0.3
0 01 0 000023 0 1 0 0 0 1
39
0.01 0.000023 0.1 0 0 0.1
Open Loop With REJa=0.0023 oz-in-sec2
Kc=55 oz/in

D i t b C id dDesigns to be Considered: Sliding Mode Control
Sliding Mode ControlNon Linear Control– Non-Linear Control
– Deal with one or more unknown bounded parametersp
– Tracks multiple states– Use with systems with
un-modeled dynamicsy– Once within sliding
boundary stays in the sliding boundary
40

D i t b C id dDesigns to be Considered: Sliding Mode Control
41 Effective Inertia Unknown: Ja≤J≤(Ja+JL)

D i t b C id dDesigns to be Considered: Sliding Mode Control
SMC Input– Derivations in Chapter IV of Thesis– States Used:
Angular Position of the ActuatorAngular Position of the ActuatorAngular Velocity of the Actuator
– Requires Full State Feedback
( ) ( )1 1ˆ ˆ ˆ ˆ1 ( )du b x f x b F u sign x xλ β η β λ− −⎡ ⎤ ⎡ ⎤= − − − − + − +⎣ ⎦ ⎣ ⎦& &&& % % %
42

D i t b C id dDesigns to be Considered: Sliding Mode Control
Input to Track: θa=sin(20t)
θaθ
aθ&
43

D i t b C id dDesigns to be Considered: Sliding Mode Control
Resonance Equalization Sliding Mode Control( )θ Input: Torque ( ) Output: θT
40Bode Plot
( )( )
a
in
sV sθ a
a a
Input: Torque ( ) Output: θ
Track: θ and θ
T&
dB)
dB)
101 102 103-20
0
20
Mag
(dB
)
Mag
nitu
de (d
Mag
nitu
de (d
0
200
400
Pha
se (d
eg)
ase
(deg
)
M
ase
(deg
)
M
44101 102 103
Frequency (rad/sec)
Pha
Pha

D i t b C id dDesigns to be Considered: Sliding Mode Control
Δ dB TR Mag TR Phase Ratio
(JL:Ja)JL
oz-in-sec2Open Loop
(dB)Δ dB(dB)
gChange
(dB)Change
(deg)
2 0.0046 9.5 0.5 0.4 4.6
1.435 0.0033 7.7 0.3 0.2 3.5
0.5 0.00115 3.5 0.5 0.1 1.6
RE
2 0.0046 9.5 0 24.652 130.84
1.435 0.0033 7.7 0 10.2 23.77
0 5 0 00115 3 5 0 0 012 1 8145
SMC
45
0.5 0.00115 3.5 0 0.012 1.8145Ja=0.0023 oz-in-sec2
Kc=55 oz/in Open Loop With RE

C l iConclusion:Designs to be Considered
Resonance Equalization– Highly Effective in Reducing the Effect of TR– Effective in Reducing ΔdB– Works for wide range of JL:Ja– Can be used with conventional control methods
Required Measurements– Required MeasurementsMotor Current or TorqueAngular Velocity
Sliding ModeSliding Mode– Accurate Model Not Needed– No Extra Control Needed to Track Desired System– Required Measurements
46
qAngular PositionAngular Velocity

TR T t Ri D iTR Test Rig Design:Overview
-Real Time Control
142 H S li R tMotor Shaft Angel (Rad)
-142 Hz Sampling Rate
-Matlab/Simulink Interface
Measures θ and θMotor Vin = + is Clockwise, Angel out = + is clockwise
Voltage_In
Load Shaft Angel (Rad)
10
151693.08
d) we (d
B)
-Measures θa and θL
0
5
Ang
el M
agna
tude
(rad
wr
warMag
nitu
de
47101
-5
Frequency (Hz)
M
Frequency (Hz)

Acknowledgements and Thanks
Superus Thanks– Mother, Father, Andy, and Jenny
Advising:– Dr. Tom Chmielewski– Dr. Paul Kalata
Funding and Support:Funding and Support:– Dr. Moshe Kam– Mr. Robert Shaffer– Dr. Edward GarGiulo– Dade Behring Inc.– Dr. Paul Oh
Special ThanksJessica Finkowski Bella Sorkin Rachel Back Kevin Lynch Nate
48
– Jessica Finkowski, Bella Sorkin, Rachel Back, Kevin Lynch, Nate Fried, Trey Davis , Jenn Voss, Daniel Luig, Brian Kravitz, Jeremy Wakeman, IEEE Drexel Student Branch

Work Cited
[1] W.J. Bigley; V Rizzo. Resonance Equalization in Feedback Control Systems: An ASME Publication, 78-WA/DSC-24, 1978.[2] Nise, Norman S. Control Systems Engineering Fourth Edition: John Wiley and Sons INC, 2004[3] Chen, Chi-Tsong. Linear System Theory and Design Third Edition: Oxford University Press, New York Oxford, 1999.[ ] , g y y g y , ,[4] Ametek: Technical and Industrial Products. Pittman Elcom ST N2314 Series Brushless DC Servo Motor. Datasheet, www.ametektip.com.[5] Kwatny, Harry G; Blankenship, Gilmer L. Nonlinear Control and Analytical Mechanics - A Computational Approach: Birkhauser, Birkhauser Boston, 2000.[6] Li, Weiping; Slotine, Jean-Jacques E. Applied Nonlinear Control Third Edition: Prentice Hall, 2001. [7] Korondi, Peter; Hashimoto, Hideki; Utkin, Vadim. Direct Torsion Control of Felexible Shaft in an Observer-Based Discrete-Time Sliding Mode: IEEE Transaction on Industrial Electronics Vol. 45, No. 2, April 1998.g , , p[8] 80/20 Inc. 80/20 1”x 1”x L Rods. http://www.8020.net/, Columbia City, IN. 2008-02-23.[9] US Digital. E6S-2500-375-HIM3 Quadrature Optical Encoder 2500CPR. Vancouver, Washington. 2008-01-20.[10] US Digital. E5S-1024-315-IG Quadrature Optical Encoder 1024CPR. Vancouver, Washington. 2008-01-20.[11] US Digital. AD4-B-S RS232 Quadrature Encoder Reader. Vancouver, Washington. 2008-01-20.[12] xPC. xPC Target 3.3 Real-Time Hardware in the Loop Solutions. The MathWorks Inc, Novi, MI. http://www.mathworks.com/products/xpctarget/, 2007-11-12.[13] MicroMo Electronics Faulharber Group MVP 2001A01+ MOD2527 Single Axis Intelligent Drive with Integrated PWM[13] MicroMo Electronics, Faulharber Group. MVP 2001A01+ MOD2527 Single Axis Intelligent Drive with Integrated PWM Amplifier RS232C Communication. Clearwater, FL. http://www.micromo.com/, 2007-09-21.[14] Chmielewski, Tom. Private Conversation. 2008[15] http://robotics.ee.uwa.edu.au/courses/embedded/tutorials/tutorials/tutorial_6/images/DC_motor_model.gif[16] Rizzo, Jincent J; Bigley, William J Jr; US Patent Number 4295081. Lockheed electronics Co. Inc. Plainfield NJ. App No: 05/866,394. Filed January 6, 1978.
49

QuestionsQuestions
2008-06-06
50

TR Test Rig Design
Real-Time System
Matlab/Simulink Interface
142Hz Sampling Rate
51

TR T t Ri D iTR Test Rig Design:Overview
52

TR T t Ri D iTR Test Rig Design:Overview
53

TR T t Ri D iTR Test Rig Design:Overview
54

TR Test Rig Design:Real-Time System xPC/Simulink
System Hardware in the Loop BlockT=0.007sec (142Hz) Fixed Step Size
Voltage_In
Motor Shaft Angel (Rad)
Motor Vin = + is Clockwise, Angel out = + is clockwise
Load Shaft Angel (Rad)
55

TR Test Rig Design:Real-Time System xPC/Simulink
Inside System Hardware in the Loop Block
In1 Out1
E bl Di bl ith C i
In OutVoltage_In
1
Motor Input ConversionEnnable Disable with Conversion
Motor Shaft Angel (Rad)1
To Serial Com 1
In1 Out1
Tick Per T to current angel (rad)
In1 Out1
Manual SwitchGet Distance travled In This Period
Bin Dist_Per_T
FIFO bin read 1
FIFORead BINARY
F 1
56Constant
0

TR T t Ri D iTR Test Rig Design:Verification
Real-Time Test Setup
be sure to set trun for the sample period before you compile
this file will go to a target pc using xPC and output on com 1 the MVP pwm out values Scope (xPC) 5
File ScopeId: 6
File ScopeId: 5Scope (xPC) 3
Target ScopeId: 4
Out11
Scope (xPC) 4
Record in mRad /sec
1
Frequency (rad/sec)
Square Wave
Motor_Angel
Terminator Scope (xPC) 1
Target ScopeId: 3
Scope (xPC)
Target ScopeId: 1
Motor Vin = + is Clockwise, Angel out = + is clockwise
Voltage_In
Motor Shaft Angel (Rad)
Load Shaft Velos (Rad/sec)
Kp
1
Frequency Ouput
Sin wave
Motor_Angel
Load Velos
Load VelosLoad Velos
57Zero-Order
Hold
Scope (xPC) 2
Target ScopeId: 2
Product 1Manual Switch 2
Constant 2
0

TR T t Ri D iTR Test Rig Design:Verification
3.122e6
Theta _Out_11
2nd Order Motor Model
s +1017 s+1.413e52Vin1
1
Theta _Out_22
Voltage In
Motor Shaft Angel (Rad)
2
Motor Vin + is Clock ise Angel o t + is clock ise
Voltage_In
Load Shaft Angel (Rad)
Vin22
58
Motor Vin = + is Clockwise, Angel out = + is clockwise

TR T t Ri D iTR Test Rig Design:Verification
Two Pole Motor Model (Pink)(Pink)Physical System Matlab/Hand Calc (Red)Physical SystemPhysical System Matlab/Computer Calc (Green)Physical SystemPhysical System Labview/Hand Calc (Black)
( )a sθ
59
( )( )
a
inV s

TR T t Ri D iTR Test Rig Design:Verification
Theta _Out_11
Extra Pole
50
s+70
2nd Order Motor Model
3.122e6
s +1017 s+1.413e52Vin1
1
Theta _Out_22Motor Shaft Angel (Rad)
Voltage_In
Load Shaft Angel (Rad)
Vin22
60Motor Vin = + is Clockwise, Angel out = + is clockwise

TR T t Ri D iTR Test Rig Design:Verification
Three Pole Motor Model (Pink)(Pink)Physical System Matlab/Hand Calc (Red)Physical SystemPhysical System Matlab/Computer Calc (Green)Physical SystemPhysical System Labview/Hand Calc (Black)
( )a sθ
61
( )( )
a
inV s

TR T t Ri D iTR Test Rig Design:TR Measurement
151693.08
10
w
5
Ang
el M
agna
tude
(rad
) wr
0
A
war
62101
-5
Frequency (Hz)

C l iConclusion:TR Test Rig Design
Measurements are taken properly and t laccurately
Runs in Real-Time properly
Motor driver needs to be replaced in order for system to function properly
63