Embed Size (px)
Citation preview
7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 1/6
Multicriteria Fuzzy Control and
Its
Application
t o DC
Servomotor Position Control
Kwan g - C h u n
Kim
an d J o n g - Hwan Kim*
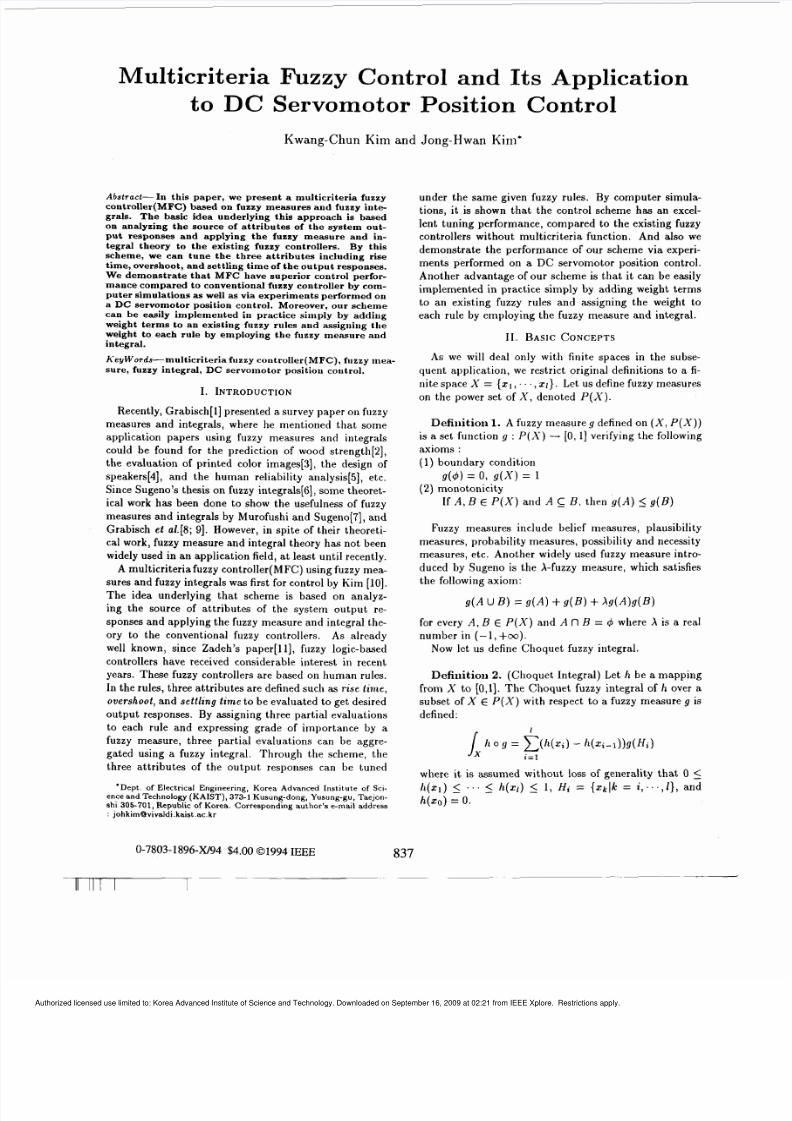
Abstract- In this paper, we present
a
multicriteria fuzzy
controller(MFC) based on fuzzy m easur es and fuzzy inte-
grals. Th e basic idea underlying this approach is based
on analyzing the source of attributes of the system out-
put responses and applying the fuzzy measure and in-
tegral theory to the existing fuzzy controllers. By this
scheme, we can tune the three attributes including rise
time, overshoot, and settling time of th e output responses.
We demonstrate that MFC have superior control perfor-
mance compared to conventional fuzzy controller by com-
puter simulations as well as via exper iments performed
on
a DC servomotor position control. Moreover, our scheme
can be easily implemented
i n
practice siiiiply by adding
weight terms to an existing fuzzy rules and assigning the
weight to each rule by employing the fuzzy measure and
integral.
I(eyWords-multicriteria fuzzy contr oller(M FC), fuzzy mea-
sure, fuzzy integral, DC servomotor position control.
I .
I N T R O D U C T I O N
Recently, Grabisch[l] presented a survey paper on fuzzy
measures and integrals , where he mentioned that some
application papers using fuzzy measures and integrals
could be found for the prediction of wood strength[2],
the evaluation of printed color images[3], the design of
speakers[4], and the human reliability analysis[5], etc.
Since Sugeno’s thesis on fuzzy integrals[6], some theoret-
ical work
has
been done to show the usefulness of fuzzy
measures an d integrals by M urofushi and Sugeno[7], and
Grabisch e2
a1.[8;91.
However, in spite of their theoreti-
cal work, fuzzy m easure an d integral theory has not been
widely used in a n application field, at least until recently.
A multicriteriafuzzy controller(MFC) using fuzzy mea-
sures and fuzzy integrals
w a s
first for control by K im
[lo].
The idea underlying that scheme is based on analyz-
ing the source of attributes of the sys tem output re -
sponses and applying the fuzzy measure and integral the-
ory to the conventional fuzzy controllers. As already
well known, since Zadeh’s paper[ll], fuzzy logic-based
controllers have received considerable interest in rec,ent
years. T hese fuzzy controllers are based on hum an rules.
In the rules, three attr ibu tes are defined such
as rise l i m e ,
overshoot,
a nd
se t t l ing t ime
to be evaluated t o get desired
output responses. By assigning three partial evaluations
to each rule and expressing grade of importance by a
fuzzy measure, three partial evaluations can be aggre-
gated using a fuzzy integral. Thr ough the scheme, the
three attributes of the output responses can be tuned
‘Dept. of Electrical Engineering, Korea Advanced Institute of Sci-
ence and Technology (KA IST) ,
373-1
Kusung-dong, Yusung-gu, Taejon-
shi 305-701,
Republic
of
Korea. Corresponding author’s e-mail address
: johkimOvivaldi.kaist.ac.kr
under the same given fuzzy rules.
By computer simula-
tions, it is shown that the control scheme has an excel-
lent tuning performance, compared to the existing fuzzy
controlle rs wi thout mult ic r i te r ia funct ion.
And also we
demonstra te the performance of our scheme v ia experi-
ments performed on
a
DC servomotor position control.
Another adva ntage of
o u r
scheme is that it can be easily
implemented in practice simply by add ing weight terms
to an existing fuzzy rules and assigning the weight to
each rule by employing the fuzzy measure and integral.
11. BASICCONCEPTS
As we
will
deal only witch f i n i t e spaces in the subse-
quent applic ation, we restrict original definitions to a fi -
nite space
X
=
( 2 1 ,
. .
.
,z,}.
Let
u s
define fuzzy measures
on the power set of X , denoted P ( X ) .
Definition 1.
A fuzzy m easure
g
defined on
( X ,P ( X ) )
is a set function
g :
P ( X ) -+
[0,
13 verifying the following
axioms
:
(1)
boundary condi t ion
( 2 )
monotonicity
g ( d )
=
0 , g(.V
= 1
If A , B E P ( X )
a nd
A
B ,
thcn
g ( A ) 5 g( B)
Fuzzy measures include belief measures, plausibility
measures, prob ability m easures, possibility and necessity
measures, etc. Another widely used fuzzy measure intro-
duced by Sugeno
is
the A-fuzzy measure, which satisfies
the following axiom:
for every A , B E P ( X ) a nd A fl
B = 4
where is a real
number in ( - 1,
+CO .
Now let
us
define Ch oque t fuzzy integral.
Defiiiitioii
2.
(Choquet Integral) Let
h
be a ma pping
from
X
to [0,1]. The Choquet fuzzy integral of
h
over a
subset of X E
P ( X )
with respect to a fuzzy measure g is
defined:
J h
0 g =
- h ( z i - I ) ) g ( H i )
i = l
where it
is
assumed without
loss
of generality that
0 5
h(zl) 5 . . . 5 h x,) 5 1, Hi = {zklk
=
i , . . . , I } ,
a nd
h(z*)
= 0.
837
-7803-1896-X/94 $4.00 0199 4 IEEE
~ ~-
-
~
Authorized licensed use limited to: Korea Advanced Institute of Science and Technology. Downloaded on September 16, 2009 at 02:21 from IEEE Xplore. Restrictions apply.

7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 2/6
I l l .
MULTICRITERIA
U Z Z Y
ONTROLLERFC)
A .
Fuzzy Reasoning wi th Weight
fuzzy
rules with weights.
We first describe a fuzzy reasoning for the following
R I : If E ( ' ) and
.
.
and
E : ) ,
Rz :
If
E ')
and . . . and
E : ) ,
then U ( ' ) with
tu( )
then U 2)ith
t
R,
Fact
:
If
e;
Cons : then U
: If Eln)
and
. .
.
and E?,"),
then
U ( )
with tu( )
and..
and
e h
where E?) a n d U(' ) are fuzzy sets, e: is
a
crisp value,
and w ( j ) s a weight.
Th e weight d i ) s a real number in [0, 11. The weight
can
be considered as a cer tainty factor [ l2] , a weighting
factor for emphatic and restrained effects on the fuzzy
inference result[ l3], or a possibility of the rule's correct-
nes s[ 141.
The firing of these rules w i t h crisp input values e ; ,
j
=
I .
.
. , t gives the trutIi values
f ( ) ,
i = 1, . .
, I
of t,he
preiiiises which are obta ined from th e C artesian protliict
x
E t ) x . .
x E:):
The defuzzification process maps the result of fuzzy
logic rule stage to a real nuniber output. I n this
pa-
per, we use the
h e i g h t defu:z?ficatzon t w t h o d
[ i s ] , whicl i
is simple to itnpleiiient and gives relatively good results.
The inference result is tlieii given by
where f i ) is called a height , and d i )
s
the peak value of
U( i ) , which is the do main element on 11 that has degree
of membership 1.
In this fuzzy reasoning, the proble in may be how to
assign weight to each rule. It is hard tlo figure out the
control result,s by changin g the weight,s of
fuzzy
rules.
Therefore, determ inati on of the postulated weight. vi&
ues
is also, i n general, based 011 lieiiristics. 111 the next
section, we
will
describe a consistent, Iiietliotl for assign-
ing the weight to each fuzzy
r u l e
by employing the
fuzzy
measure and integral .
B .
Deszgn of
M F C
Now let us consider a problem where a person subjec-
tively evaluates an ob ject according to his preference. As-
sume that the object in the problem can be divided into
elements or it has attr ibutes . Let
X
=
{
z1,
. . .
,z,} e
a
set of such elements
or
a t t r ibu tes .
Let h
: X
0 ,1 ] be par t ia l evaluat ion of the object .
T h a t is,
h(z , )
mplies a partial evaluation of the object
from the viewpoint of an element z,. n the applications,
a par t ia l evaluat ion
h ( t i )
can be determined either ob-
jectively or subjectively.
NE NM NS U FS FN PB
I
0
I
0 I
Fig. 1. Membership Functions
Taking a fuzzy integral of h with respect to
g ,
we have
w = k h o g
Above equ atio n represents the aggregation of parti al
evaluations, where w can be considered as the overall
evaluat ion of the object .
In the previous fuzzy rules, we choose attr ibu tes and
assign partial evaluations h ( ' ) ( z j ) o rule R, f r om the
viewpoint of an at tr ibu tes z j Th e average value in each
rule c a n be obtained from the fuzzy integral of h ( ' ) ( z j )
with respect to preassigned fuzzy measure
g .
The av-
erage value
is
then used as a weight to each rule. T his
process is summarized as follows:
RI
/ L ( l ) ( = l ) , . . , h ( l ) ( ~ , )
+ w 1 )
=
h( ' )
o g
R2
( ) ( z l ) ,
. ,
-
= o
g
Tliiis,
f inal consequence U*
is
inferred
as
the weighted
average of di) by the degree
where d i Jx
h(')
o g
In this pa per, we choose time-domain specifications in-
cluding
z1
= r i s e t i n e , 2 2 = overshoot , a n d t3 = se t t l ing
l i m e
as
the at tr ibutes of the system output responses .
These three at tr ib utes are the m ain terms of t ime-domain
specification when we design a control sys tem. Th e col-
lection of l inguis f ic va lues is
L =
{
N B , N M ,
N S ,
20,PSIP M , P B )
Figure 1 shows
a
plot of the membership functions of
linguistic values. Th e meaning'' of each lingu istic value
should be clear from its mnemonic.
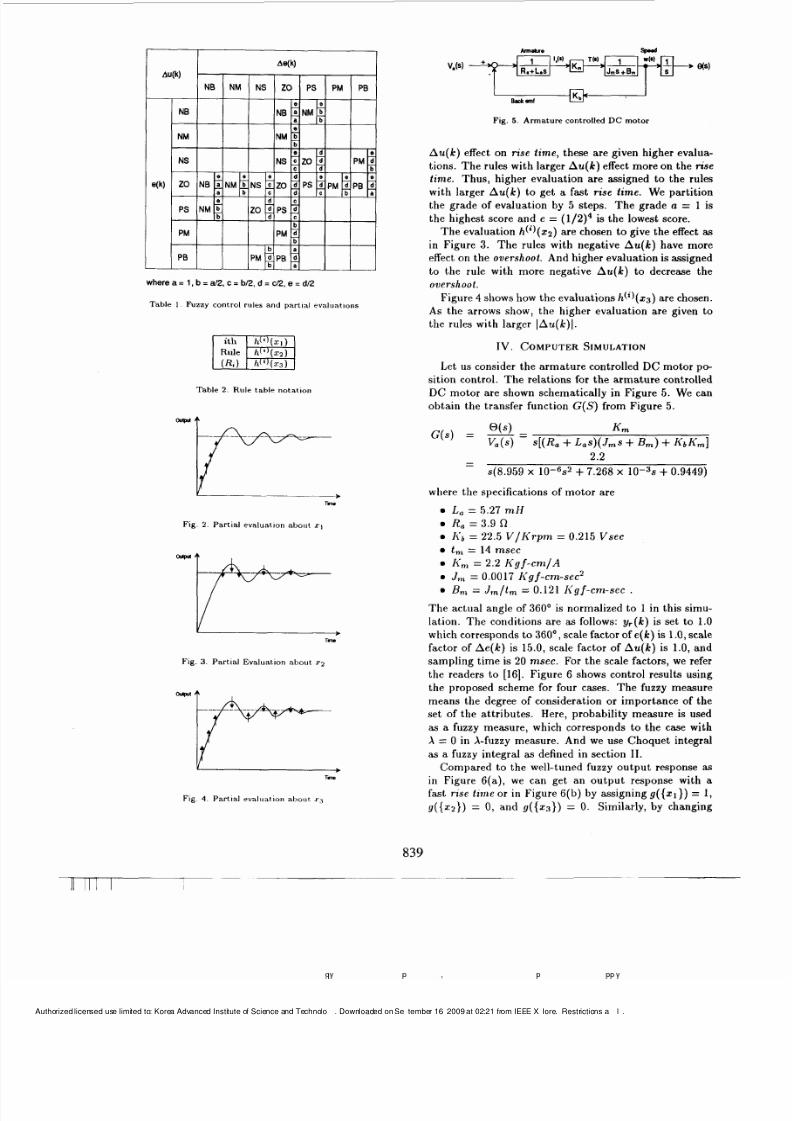
Fuzzy control rules are given in Table 1.
e ( k )
= yr (k ) -
y k) where y,(k)
is
the reference input,
y k)
is the system
o u t p u t , a n d A e ( k ) = e ( k )- ( k - 1) .
As shown in Table 2 , each rule in Table 1 contains the
three partial evaluations It( )(.) o each at tr ibu te such as
r i se h i e , o ve rs ho o t,
a n d
s et tl in g f i n e .
These three eval-
uat ions are based on hu man reasoning, and the basic idea
of assigning these evaluations is very clear and consistent
from Figure 2
-
.
Figure 2 shows how the pa rtial evaluation s h( ')(z l ) re
obta ined . Since the fuzzy rules with positive
e ( k )
a n d
7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 3/6
I I 1
where
a = 1 ,
b
= d 2 ,
c =
b l2 , d
=
cE,e
=
d/2
Table 1 Fuzzy control rules and partlal evaluations
Table 2. Rule
table notat.ion
Fig.
2 .
Partial
evaluation
about
c1
Fig.
3 .
Partial Evaluation about 2
r-
Fig.
4 .
Partial evaluation
ahout
x3
Fig. 5. Armature controlled DC motor
A u ( k ) effect on rise t i m e , these are given higher evalua-
tions. T he rules with larger Au(k) effec t more on t he
r i s e
t i m e .
Thu s , h igher eva lua tion are ass igned to t he rules
with larger A u ( k ) to get a fast
rise
t i m e .
We part i t ion
the grade of evaluation by
5
s t e ps . T he g ra de a =
1
is
the highest score and e = (1/2)4 is the lowest score.
Th e evalua t ion h ( i ) ( z 2 ) re chosen t o give the effect
as
in Figure
3.
Th e rules wi th negat ive
Au(k)
have more
effect on the
overshoot .
And higher evaluation is assigned
to the rule with more negat ive A u ( k ) to decrease the
overshoot.
Figure 4 hows how th e evaluations h(*) ( t3 ) re chosen.
As the arrows show, the higher evaluation are given to
the rules with larger IAu(k)I.
I V . COMPUTERIMULATION
Let us cons ider the arm ature control led D C m otor po-
s i t ion control . T he re la t ions for the arm atu re control led
DC motor a re shown schematica l ly in Figure 5 . We can
obta in the t ransfer funct ion G(S) r o m Figure 5 .
@(SI Km
Va(s) - s [ ( R a+ L a s ) ( J m s
Bm)
+ IcbIi m]
2.2
s(8.959 x 10-6s2 + 7.268 x 10-3s +
0.9449)
G ( s ) =
-
-
where the specifications of motor are
La
= 5 .27 m H
R, =
3 . 9 R
l i b = 22.5 Vlli rpm = 0.215
V s e c
t,, = 14 ms e c
A' ,
=
2 . 2 Kgf-cni lA
J,,, = 0.0017 Ilrgf-cni-sec2
B =
J , , / t ,
=
0.121 A gf-cm-sec
.
Th e ac tua l angle of 360 i s normal ized to 1 in this simu-
la t ion. The condi t ions are
as
follows: y,(k) i s se t to 1.0
which corresponds to 360 scale facto r of e ( k ) is 1.0, scale
factor of Ae(k) is 15.0, scale factor of
Au(k)
s 1.0, a nd
s a mpl ing t ime i s
20 msec.
For the scale factor s, we refer
the readers to [16]. Figure
6
shows control results using
the proposed scheme for four cases. T he fuzzy measure
means the degree of consideration
or
importance of the
set of the attrib utes. Here, probability m easure is used
as
a fuzzy measure, which corresponds t o the case with
X = 0 in A-fuzzy measure. And we use Choquet integral
as
a fuzzy integral
as
defined in section
11.
Comp ared to the wel l - tuned fuzzy outp ut response as
in Figure 6(a ) , we can ge t a n out pu t response with a
fast
rase t ime or
in Figure
6(b)
by assigning g((z1)) =
1 ,
g ( ( 2 2 ) ) = 0, a nd g( (23) )
=
0. Similarly, by changing
Authorized licensed use limited to: Korea Advanced Institute of Science and Technolo . Downloaded on Se tember 16 2009 at 02:21 from IEEE X lore. Restrictions a l .
7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 4/6
Fig.
7
Rise time
~
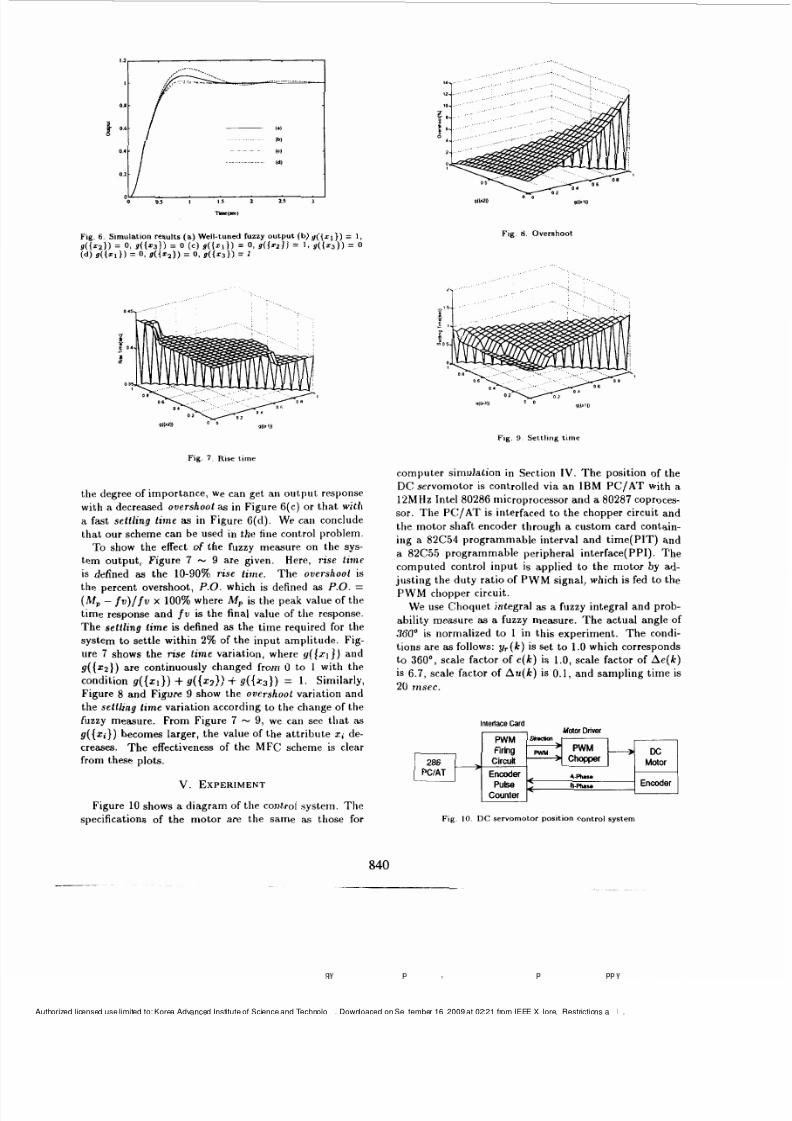
the degree of importance, we can get an output response
with a decreased
overshoot
as in Figure 6(c)
or
tha t wi th
a fast s e t t l i n g t i m e as in Figure
G(d).
We call conclude
tha t
o u r
scheme can be used in the fine control problem.
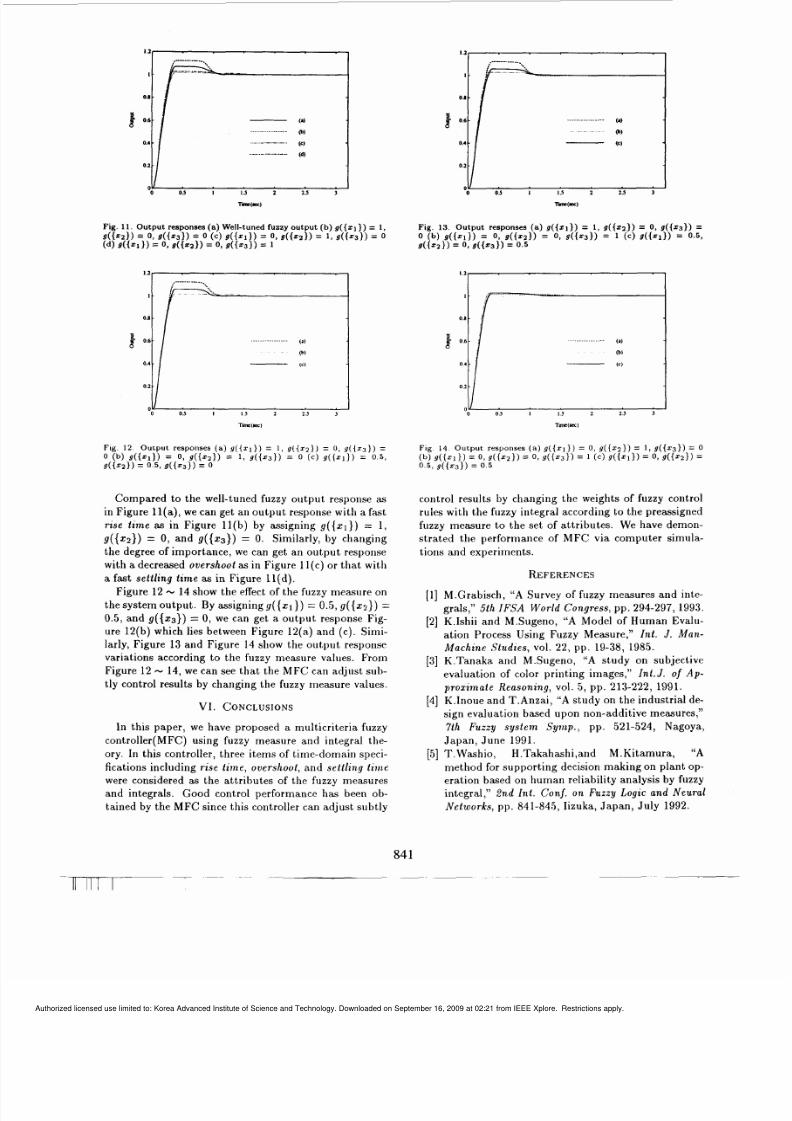
To show the effect of the fuzzy measure on the sys-
t e m ou tpu t , Figure 7
-
9 are given. Here, r i se t i m e
is defined
as
the 10-90% rise t i m e . T h e
overshool
is
the percent overshoot, P.O. which is defined as P.O. =
Mp- v ) / f w
x
100% where Mp s the peak value of the
t ime response and f v
is
the final value of the response.
T h e
settl ing t ime is
defined
as
the time required for the
sys tem to se t t le w i thin
2
of the input ampli tude . Fig-
ure 7 shows the r i s e t i m e variation, where g((zl}) and
g((z2)) are continuously changed from 0 to 1 with the
condition g((z1))
+
g((z2))
+
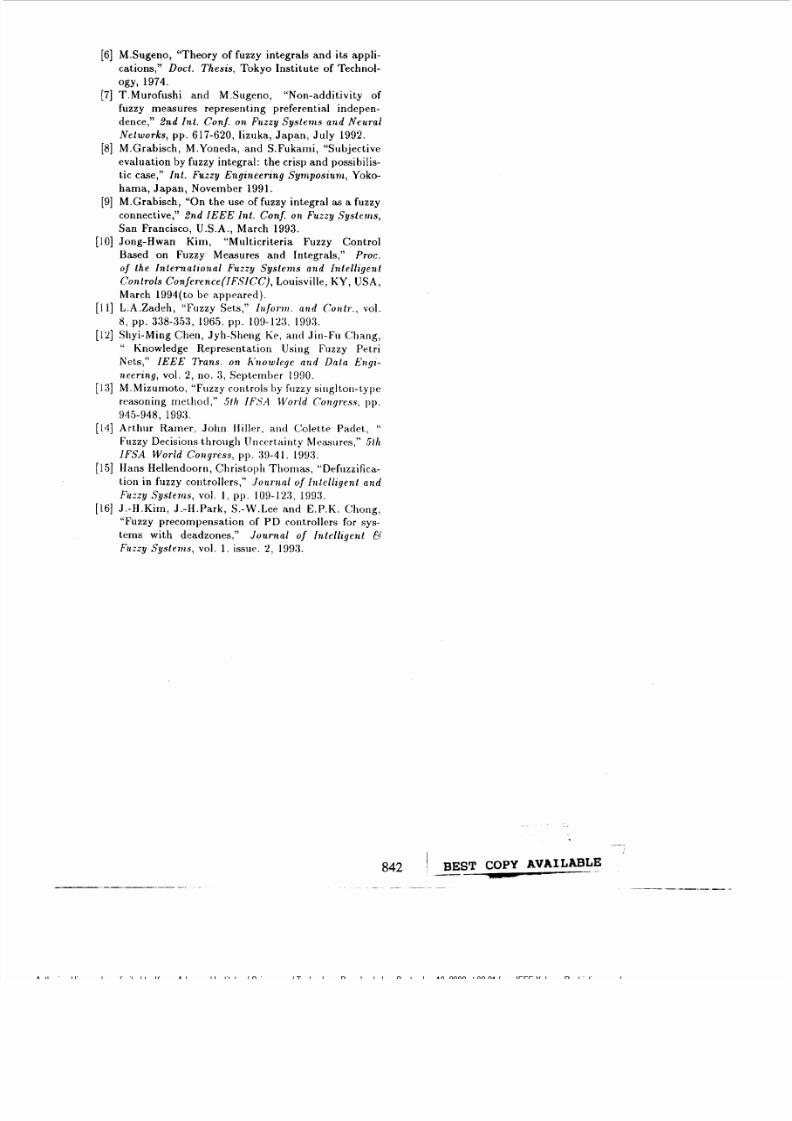
g((z3)) = 1. Similarly,
Figure
8
a nd Figure
9
show the
overshoot
variation and
the
sett l ing time
variation according to the change of the
fuzzy measure. From Figure
7
- 9, we can see that
as
g({zi}) becomes larger, the value of the attribute zi de-
creases. T h e effectiveness of the M FC scheme is clear
from these plots.
PWM
CW
Circuk
-
Chapper
Motor
Firing
WM
c
V . EXPERIMENT
Figure 10 shows a diagram of the control sys tem. T he
specif ica t ions of the motor a re the same
as
those for
Fig 8. Overshoot
Fig. 9 Settling time
computer simulation in Section IV. The pos i t ion of the
DC servomotor is controlled
v i a
a n IBM PC /AT wi th a
12MHz Intel 80286 microprocessor an d a 80287 coproces-
sor. The PC/AT is in terfaced to the chopper c i rcui t and
the motor shaft encoder through a custom card contain-
ing a 82C54 programmable in terva l and t ime(P1T) and
a 82C55 programm able periphera l in terface( PP I) . T he
computed control input
is
appl ied to the motor by ad-
jus t ing th e duty r a t io of PW M s ig nal , which
is
fed to the
PWM chopper circuit.
We use Choquet integral as a fuzzy integral and prob-
ability measure
as
a fuzzy measure . Th e ac tua l angle of
360 is normalized to 1 in th is experiment . The condi-
t ions are as follows:
y r(k ) is
s e t t o
1.0
which corresponds
to
360°,
scale factor of e ( k )
is 1.0,
scale factor of
Ae(k)
is
6.7,
scale factor of A u ( k ) is 0.1, and sampling t ime is
20 nisec.
lniedace
Card Motor
Driver
Counter r
Fig.
10 . D C
servomotor position control system
840
-----
Authorized licensed use limited to: Korea Advanced Institute of Science and Technolo . Downloaded on Se tember 16 2009 at 02:21 from IEEE X lore. Restrictions a l .
7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 5/6
13
1
1 -
0.8.
”
0.6-
0.4.
,--_
-.-
.
-.-
....... ....a
........-
....
@)
................
b)
(C)
Com pared to th e wel l - tuned fuzzy outp ut response as
in Figure l l (a) ,we can get an outp ut response with a fa s t
r i se t ime as
in Figure l l (b) by ass igning g((z1))
=
1,
g((z2)) =
0 ,
a nd g ( ( z g ) ) =
0.
Similarly, by changing
the degree of impor tance , we can get a n out, put response
with
a
decreased
overshoot
as
n Figure 1
( c )
or
tha t wi th
a fas t se t t l ing t ime as i n F igu re l l (d ) .
Figure 12
-
4 show th e effect of th e fuzzy measure o n
the s ys te mou tpu t . B y a s s ign ingg( (z 1 ) ) = 0.5 , g((z2 )) =
0 .5 , a nd g ( (z 3 ) ) = 0, we can get a output response Fig-
ure 12 (b) which lies between Figure 12(a) and (c). Simi-
larly, Figure 13 and Figure 14 show th e ont,pnt, response
varia t ions according to the fnzzy measnre va lues . From
Figure 12 - 14, we can see tha t the M FC can adjus t
sub-
t ly control results by cha nging the fuzzy meas ure values.
V I .
CONCLUSIONS
In this paper, we have proposed
a
multicriteria fuzzy
controller(MFC) using fuzzy measure and integral the-
ory. In thi s controller, thre e item s of time-dom ain speci-
fications including rise t ime, overshoot , a nd settling tiiue
were considered as the a t t r ibutes of the fuzzy measures
and in tegra ls . Good control performance has been ob-
tained by the M FC since this controller can adjust subtJy
1
control results by changing the weights of fuzzy control
rules with th e fuzzy integra l according to the preassigned
fnzzy measure to th e se t of a t t r ibute s . We have demon-
s t ra ted the performance of
M
FC v ia c ompute r s imu la -
t ions and experiments .
REFERENCES
[ l ] M.Grabisch, “A Survey of fuzzy measures and inte-
gra ls ,”
5th
IFSA World Congress , pp. 294-297, 1993.
[2] K.Ishii and MSugeno, “A Model of Human Evalu-
ation Process Using Fuzzy Measure,” I n t . J . Man-
Machine S tudies , vol. 22, pp. 19-38, 1985.
[3] K.Tanaka and MSugeno, “A s tudy on subjec t ive
evaluation of color printing images,” In t .J . of A p -
proximate Reasoning, vol. 5, pp. 213-222, 1991.
[4] K.Inoue and T.A nzai , “A s tudy on th e indus tr ia l de-
sign evaluation based upon non-additive measures,”
7th Fuzzy sys tem Sy inp. , pp. 521-524, Nagoya,
J a pa n , J une 1991 .
[5] T.Washio, H.Takahashi ,and M.K itamura , “A
me thod for support ing decision making on plant op-
eration based on hu ma n reliability analysis by fuzzy
integra l ,” 2nd Int . C on f , on Fuzzy Logic and Neural
Ne t wo r k s ,
pp. 841-845, Iizuka, Japan, July 1992.
Authorized licensed use limited to: Korea Advanced Institute of Science and Technology. Downloaded on September 16, 2009 at 02:21 from IEEE Xplore. Restrictions apply.
7/25/2019 Control Dc Servo
http://slidepdf.com/reader/full/control-dc-servo 6/6
[6] MSugeno, “Theory of fuzzy integrals and its appli-
cations,”
Doct. T h es i s ,
Tokyo Institute of Technol-
ogy, 1974.
(71 T.Murofu shi and M.Sugeno, “Non-add itivity of
fuzzy measures representing preferential indepen-
dence,”
2nd In t . Co nf . on Fuzzy Sys tems and Neura l
Networks p. 617-620, I izuka, Jap an , July 1992.
[8] M.Grabisch, M.Yoneda, and S.Fukami, ‘‘Subjective
evaluat ion by fuzzy integral: the crisp and possibilis-
tic case,”
In l . Fuzzy Engineering Symposiu in ,
Yoko-
ham a, Jap an, November 1991.
[9] M.Grabisch, “O n th e use of fuzzy integral as a fuzzy
connective,”
2nd IEEE In t . Conf . on Fuzzy Syste i t i s ,
San Francisco, U.S.A., March 1993.
[IO] Jong-Hwan Kim , “Mu lticriteria Fuzzy Control
Based on Fuzzy Measures and Integrals,” P r o c .
of the In terna t iona l Fuzzy Systems and In tel l igen t
Contro ls Conference(IF,CICC),
Louisville, K Y ,
USA,
March 1994(to b e appear ed) .
[ l
I ]
L.A.Zadeh, “Fuzzy Set,s,”
Iiijoritt . and
C o n l r . , vol.
[IZ] Shyi-Ming Chen, Jyh-Sheiig
Ke,
and diu-Fu C%ang,
“
Knowledge Representation Usiiig Fuzzy Petri
Nets,”
IE EE Tra ns. on It-iiowlege and
D a t a
E i i g i -
nrering ,
vol.
2 ,
no.
3 ,
September
1990.
[ I n ] M.Mizumoto, “Fiizzy controls Iiy
fuzzy
siiiglton-t,ype
reasoning method,” 5 / h IFSA World C o n g ress ,
p p .
“
Fuzzy Decisions throu gh Ilncertlairit,y Measures,”
5 / h
IFSA
World
C o n g ress , pp . 39-4 1 1993.
[I51 H ans Hellendoorn, C tiristopli Th om as, “Defuzzifica-
tion in fuzzy controllers,” Journa l
of
l i i le l l igei i / and
Fuzzy S ys t en i s ,
vol.
1
p p . 109-123, 1993.
[161 J . -H.Kim, J . -H.Pa rk, S . -W.Lee and E.P.K. Chong,
“Fuzzy precompensation of PD controllers for sys-
tems with deadzones,”
Journal
of
Iirtelligent
Futzy Systems, vol. 1. issue.
2 ,
1993.
8 , p p . 338-353, 1965.
PI).
109-123 1993.
945-948,
1 9 9 ~
[I41
Arth ur Ra me r, .John Hiller,
arid
Colette Patlet,
842
c
EST COPY
AVAILABLE
- -__
-
_.
__
- __
~