Embed Size (px)
Citation preview
40. SBAI • SimpósioBrasileiro de Automação Inteligente, SãoPaulo,SP. 08·10 de Setembrode 1999
CONTROl AlGORITHM FOR DISCRETE - EVENT SYSTEMSUSING STRUCTURAL BOOlEAN VARIABlES
Stanislav TairovMechanical Engineering Department - Exact Science andTechnology Center
University of Caxias do Sul, C.P.1352, Caxias do Sul - RS - Brazile-niail:[email protected]
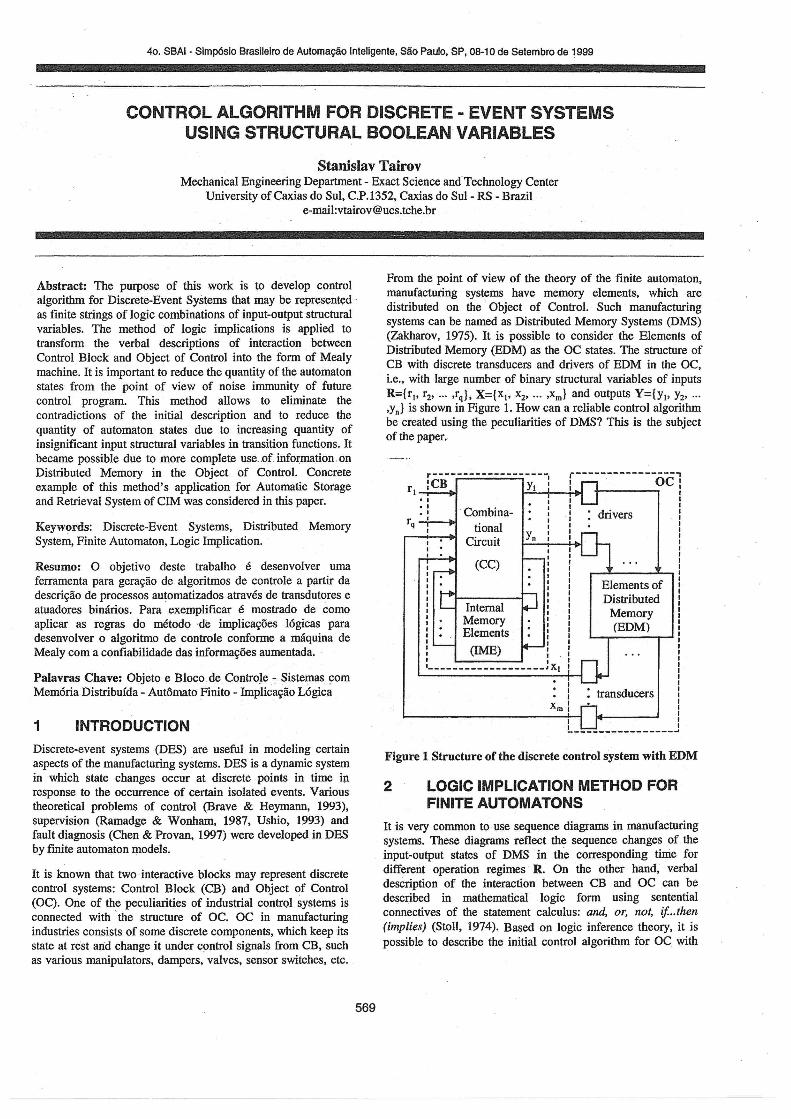
From lhe point of view of lhe theory of lhe finite automaton,manufacturing systems have memory elements, which aredistributed on lhe ' Object of ControI. Such manufacturingsystems can be named as Distributed Memory Systems (DMS)(Zakharov, 1975). It is possible to consider lhe Elements ofDistributed Memory (EDM) as lhe OC states. The structure ofCB with discrete transducers and drivers of EDM in lhe OCi.e., with large number of binary structural variables of inputs
r2, ... ,:q}, x2' ... ,xm } and outputs Y={Yl' Y2' ...,Yn} IS shown m FIgure 1. How can a reliable control algorithmbe created using the peculiarities of DMS? This is lhe subjectof lhe paper.
drivers
transducers
ElementsofDistributedMemory(EDM)
IIIIIIII
I IL J
III
x., I
Yn
r----------------,: . OCIII
·1III
(CC)
(!ME)III
Abstract: The purpose of this work is to .develop controlalgorithm for Discrete-Event Systerns that may be represented .as fmite strings of logic combinations of input-output structuralvariables. The method of logic implications is applied totransformo lhe verbal descriptions of interaction betweenControl Block and Object of Control into the form of Mealymachine. It is important to reduce lhe quantity of lhe automatonstates from lhe point of view of noise immunity of futurecontrol programo This method alIows to elíminate lhecontradictions of lhe initial description and to reduce lhequantity of automaton states due to increasing quantity ofinsignificant input structural variables in transition functions. Itbecame possible due to more complete use .of information .onDistributed Memory in lhe Object of Controi. Concreteexample of this method 's application for Automatic Storageand Retrieval System of CIM was considered in thís paper.
Keywords: Discrete-Event Systems, Distributed MemorySystem, Finite Automaton, Logic Implication.
Resumo: O objetivo deste trabalho é desenvolver umaferramenta para geração de algoritmos de controle a partir dadescrição de processos automatizados através de transdutores eatuadores binários. Para 'exemplificar é mostrado de comoaplicar as regras do método de implicações lógicas paradesenvolver o algoritmo de controle conforme a máquina deMealy com a confiabilidade das informações aumentada . .
Palavras Chave: Objeto e Bloco de Controle - Sistemas comMemória Distribuída - Autômato Finito - Implicaç ão LÓgica
1 INTRODUCTIONDiscrete-event systems (DES) are useful in modeling certainaspects of lhe manufacturing systems. DES is a dynarnic systemin which state changes occur at discrete points in time inrcsponse to the occurrence of certain isolated events . Varioustheoretical problems of control (Brave & Heymann, 1993),supervision (Ramadge & Wonham, 1987, Ushio, 1993) andfault diagnosis (Chen & Provan, 1997) were developed in DESby fmite automaton models.
It is known that two interactive blocks may represent discretecontrol systems: Control Block (CB) and Object of Control(OC). One of lhe peculiarities of industrial control osystems isconnected with 'lhe structure of OCo OC in manufacturingindustries consists of some discrete components, which keep itsstate at rest and change it under control signals from CB, suchas various manipulators, dampers, valves, sensor switehes, etc. .
Figure 1 Structure of the díscrete control system with EDM
2 LOGIC IMPLlCATION METHOD FORFINITE AUTOMATONS
It is very common to use sequence diagrams in manufacturingsystems. These diagrams reflect lhe sequence changes of lheinput-output states of DMS in lhe corresponding time fordi.ffererit operation regimes R. On lhe other hand, verbaldescription of lhe interaction between CB and OC can bedescribed in mathematical logic form using sententialconnectives of lhe statement calculus: and, or, not, if...then(implies) (Sto11, 1974). Based on logic inference theory, it ispossible to describe the initial control algorithm for OC with
569
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
the Distributed Memory as series of arguments (Zakharov, easier to maintaín their stability, to proteet and reeover these1975): states.
• structural variables o X, Y, which depend on theconstruction of industrial systems, cannot be coded free,
Control Blocks of DMS, from lhe point of view of lhe model offinite automaton, have lhe folIowing peeuliarities:
• strings of input and output states are limited; i.e., lhebinary structural variables have much less admissiblecombinations than are possible,
where the premise <J' is any logic function (or, and, not) of thestructural variables of X. the conclusion '" is any logic function(and, not) of the structural variables of Y, "I" is the symbol oflogical consequence.
V i,j E t7J<J'i,j :::; A XI ,X2,...,Xvov. I. }'. /
The proposed method is based on analysis of contradictions ofinitial strings in pairs in accordance with the following role(Tairov, 1980):- two arguments i andj in form (1) are contradictory if
<J'i n<J' j ;t 0} ,o(3)"'i ;t '" j
where <J'i and lfJ.j are the input abbreviated conjunctions of X, 'I'iand lf/jare the output complete conjlinctions ofY.The elimination of contradictions of the initial description isperformed via the predominant complementation of lheantecedents in (1) by insignificant input variables. Ifimpossible, lhe new state is added to automaton description (2).
Let us consider application of this method for design of controlalgorithm in finite automaton form for Automatic Storage andRetrieval
(1)<J' I "',
The description (1) can be read as "the statement <J' is true onlyif the statemcnt '" is true". That is, the initial algorithm of CBoperation may be represented as strings of conditionalsentences, when the antecedents are logic functions of .inputvariables of X and the consequents are logic functions of outputvariables ofY.
• few variables change their state at lhe same time.
Based on these peculiarities, initial string of conditionalsentences (I) contains only eventual significant variables, i.e.,varlables which change their states. The symbol insteadof "I", can be used for conjunctions of input-output variables in(1), if the logic expression q;(xJ. x2' .... xm)-7l{1(YJ. Y2' .•. •Y,.Jis a tautology; (symbol "-7" means the logic operation ofimplication) .
It results in simple initial logic description of operationalgorithm. However, the initial description of lhe controlalgorithm, as finite strings of logic combinations of input-output structural variables, which was verbalIy described by lhesystem designer, is usualIy incomplete and contradictory. Theproblem is to synthesize the complete consistent controlalgorithm, which wi1l tak:e into account peculiarities of theconsidered manufacturing systems.
In (Zakharov, 1975) was shown.that it is possible to describe o
the control algorithm as lhe fínite automaton when transitionand output function s (Mealy machine) can be represented inconsequent form (1). This work proposes a regular method fortransforming the initial input-output string into automatonalgorithm in the folIowing form:
.f;(xj>xz,. ...x[ ) A A{yl A yz A ... A Yn )i' (2)
where 1("11 1("1'are abstract states of desired automaton, iE {J.N}is the number of integrated functions, N is the quantity oftransitions, k is lhe quantity of the input variables, which formlhe logic functionf; (or, and, not) , í E m is the quantityof input structural variables, n is the quantity of outputstructural variables, Y is eitherY or Y.In general , Control Blocks of manufacturing systems areimplemented by software. However, it is important to reducethe quantity of automaton states from lhe point of view of noiseimmunity. In other words, the less lhe quantity of the .states, lhe
3 CONTROl AlGORITHM fORAUTOMATIC STORAGE ANDRETRIEVAl SYSTEM
3.1 Storage and Retrieval SystemDiagram
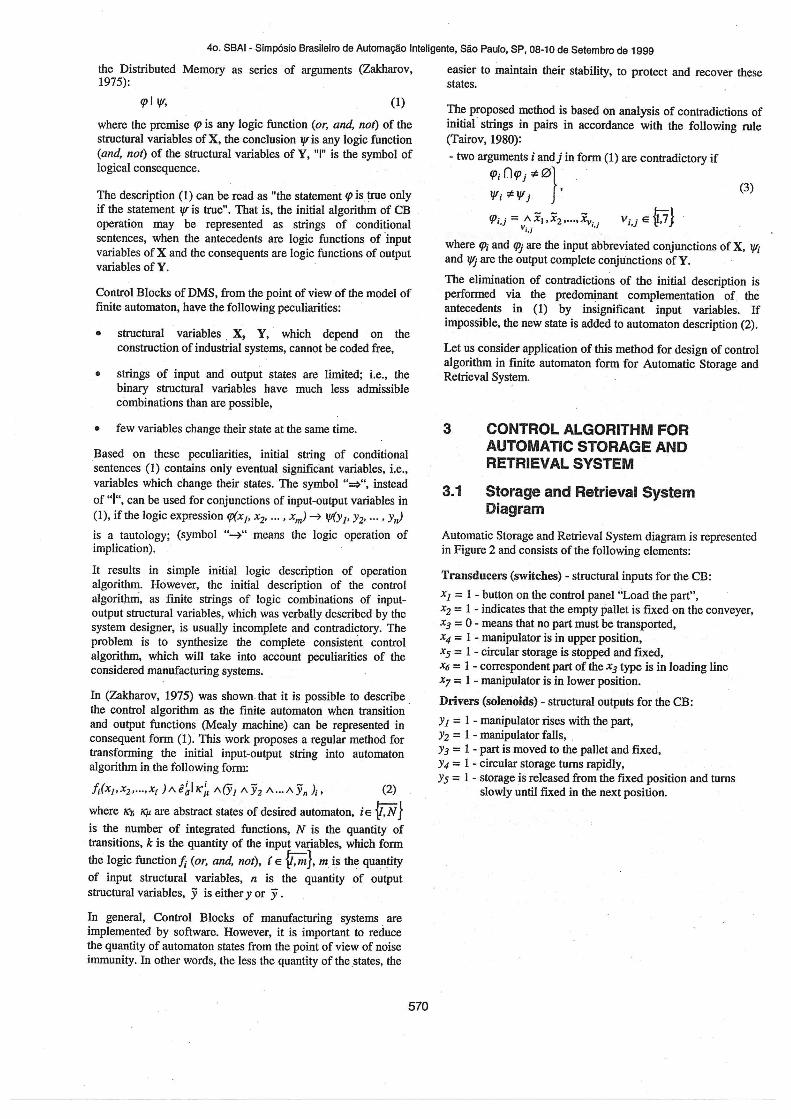
Automatic Storage and Retrieval System diagram is representedin Figure 2 and consists ofthe folIowing elements:
Transducers (switches) - structural inputs for lhe CB:x l :::; 1 - button on the control panel "Load the part" ,x2 :::; 1 - indicates that lhe empty pallet is fixed on the conveyer,x3 :::; O- means that no part must be transported,x4 :::; 1 - manipulator is in upper position,rs> 1 - circular storage is stopped and fixed,X6 :::; 1 - correspondent part of the x3 type is in loading linex7:::; 1 - manipulator is in lower position.
Drivers (solenoids) - structural outputs for the CB:Y1 :::; 1 - manipulator rises with lhe part,Y2 :::; 1 - manipulator falIs, o
Y3:::; 1 - part is moved to lhe palIet and fixed,Y4:::; 1 - circular storage turns rapidly,Ys:::; I - storage is released from lhe fixed position and turns
slowly until fixed in lhe next position.
570
400 SBAI • Simpósio Brasileiro de Automação Inteligente, SãoPaulo,SP, 08-10de Setembrode 1999
ControlpanelXI
00"""""'0-x 3c::K1
. .,.:,:,;\.,c::P Y3. "-- -- - .
. . . - ...
::YI
ce=J ::,,\ x,:
" A \
? conveyer
Figure 2 Automatic Storage and RetrievaI Diagram
(auxiliary mode to avoiddestruction of the manipulator)
3.2 Description of the control systemoperationmodes
Operation mode I:If, by aoy cause, the manipulator is not fixed in lower position(x4=0) and the "Load the pare' mode was not started (Xi=O ),tum on the solenoid Y2 and lower lhe manipulator. When lhemanipulator is lowered (x4=1), the solenoid Y2 must be turnedoff, This verbal description corresponds to the following input-output string that can be represented by the initial implicationsystem as:
xjx4 1 Y2'Xjx4 1 Y2
Operation mode 11:If, by any cause, lhe circular storage is not fixed (x5 =0), tumon lhe solenoids Y5 and Y2 in .order lo adjust and lo fix thestorage. When the storage is fíxed (x5 =1), tum off thesolenoids Y5 and Y20The corresponding initial system of logicimplications is the following:
XjX5JYiY5' (the auxiliary mode lo keep theXjx51 Y2Y5 circular storage ín fíxed state)
Operation modem:lo AlI solenoids must be turned off in the initial state:
xj IYâ 2Y3Y4Y5 '
2. Tum on the solenoid Y5 to release rotation of the storage,if the button x, was pressed, the part type is not empty(xJ=I) and the selected part is not in loading line ofmanipulator (xó=O). The solenoid Y2 must be tumed on tokeep manipulator in lower position:
Xj X3XÕ'Y2Y5'3. Mode1I1must be continued after releasing button xl> i.e.:
XjX3XÕ ' Y5 o
lower position and the selected part is not in loading line ofmanipulator(x6 = O):
x4xõ IY2Y4Y5'5. When signal of the traosducer X6=1 appears (selected part
is approaching to loading line of manipulator), it isnecessary to tum off the rapid rotation solenoid Y4 and lokeep turning 00 Y5 to tum the circular storage slowly untilthe fixing rod x5 stops it:
xõl Y2Y4 Y5
6. Tum off solenoids Y2 and Y5 after correct fixing of thestorage (x5 =1):
X5' Y2Y5'
7. Tum on the solenoid of manipulator lift Yi. when theempty pallet is in loading line of manipulator (x2= I) :
x2 lYi'
8. When manipulator with selected part reaches upperposition (x7 =I), it is necessary to tum on the solenoid Y3to move the part from manipulator and lo fix it on thepallet, and lo tum off the solenoid Yi . Checkthe emptystate of the loading pallet (X2=1) once more to avoidmechanical destruction:
X2 X7' YjY3 °9. After fíxíng of part in the pallet (x2=0), tum off the
solenoid YJ and tum 00 the solenoid Y2 of manipulatordescent:
X2' Y2Y3 '
10. Tum off the descending solenoid Y2' when the manipulatorreaches lower position (X4 = 1):
X4' Y2"
Analysis of this description shows that:
4. It is necessary to tum on solenoids Y4 and Y5 and to keepturning on lhe solenoid Y2, if the manipulator is in the
• Input-output strings of structural variables X, Y are useddirectly in the logic forro (I) for inítial description of the
571
40. SElAI- SimpósioBrasileirode Automação Inteligente, SãoPaulo,SP, 08-10de Setembrode 1999
operation modes, which proceed from the : sequence The following steps must do elimination of contradictions ofdiagrams of this manufacturing system. the initial description:
• The antecedents and the consequ énts of logic implicationswere synthesizes by abbreviated conjunctions of variablesofX and Y. That is, the conjunctionson the left and rightsides of the implications do not contain all structuralvariables from X and Y. but these conjunctions form thelogic intervals of the input-output states only from eventualsignificant structural variables .
• The initial system of logic implicatíons, which wasobtained from the verbal descript ion of operation modes,does not belong to the finite automaton class. That is, thisinitial description is incomplete and contradictory.
3.3 Control algorithm development
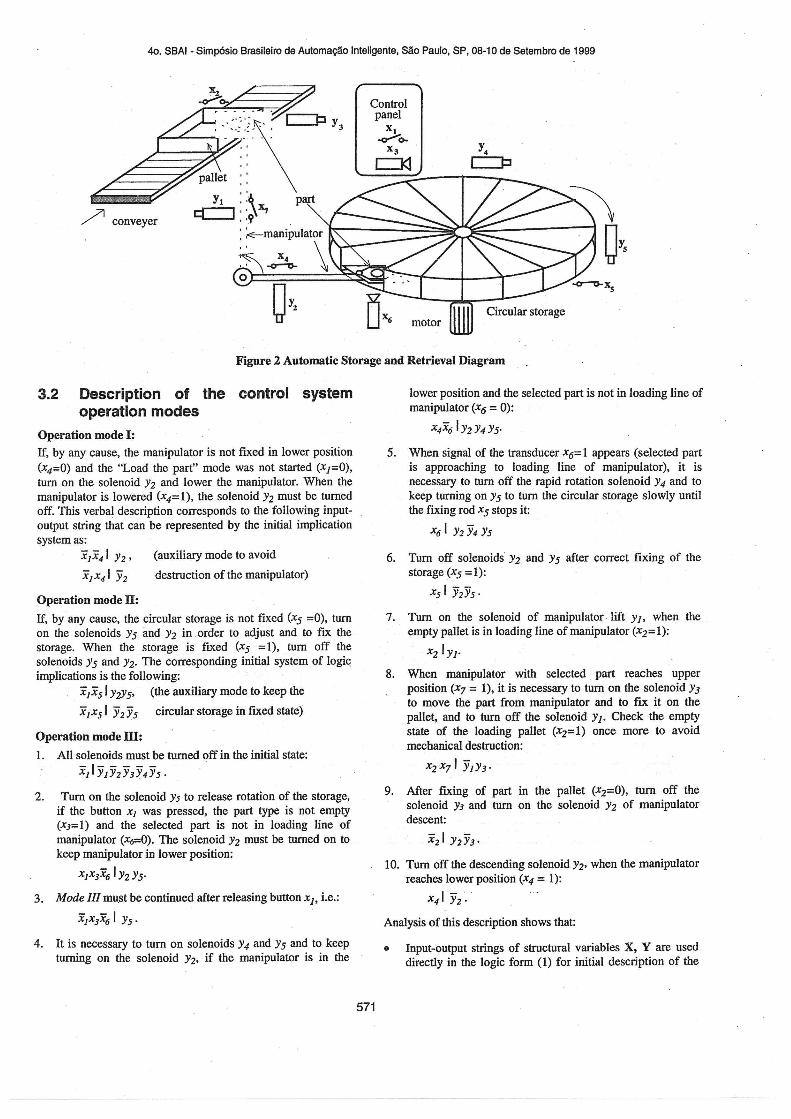
I. Complete the right sides of the initial logic implications withall structural variables of Y obtaining detenninate output states :
lf/i =1\(Y1.···.Y5)i'
2. Test contradiction between implications i andj using (3).
3. Complete abbreviated conjunctions in antecedents withinsignificant relevant input variables of X, based on detailedanalysis of the operation modes and test contradictionaccording to the role (3).
4. li impossible to eliminate contradictions by insignificantvariables ofX. the new abstract state I(p is added to !ME of CB.
AlI steps of this technique are represented in Table I.
Table 1 - Control Algorithm Development TechniqueM N° iof Logic intervals of input Constituents of Abstract Implications i j.{x1,.·.,X7J . i set of AbstractQ impli- states output states output andj are elimination of states ofd cation qJi =I\X1'· ··.Xv. •Vi E {l:7} v.=I\(Y1"'" Y5)i states Â.r contradictory contradictions for.i line CB I(Jl
e v, •
1 X1(x4)(xS) Y1Y2Y3yá5 Â() 1 and 11 11. x4 Initial state1 and 13 13.xs /Co
2 X1 X3X6 Y/Y2Y3 Y4Y5 À] 2 and 10 10. x] /Com 3 x /x3x6 (xs) Y/ Y2Y3Y4Y5 À] 3 and 1 1.0 New stateo 3 and4 4.xS I(]
d 4 X4 x6( x5) Y/Y 2Y3Y4Y5 ít:z 4and3 3. x5 /(1
e 5 x6( x5) Y1Y2Y3Y4Y5 ').] 5 and6 6, X5 I(]
6 xsCx6) Y/Y2 Y3Y4Y5 Â() 6 and 3 3,x6 I(]
6and5m 7 xi x6){xS){ x7 ) Y/ Y2Y3Y4Y5 À3 7 and3 3, x6
7 and5 s. »,7 and6 6.0 New state7 and 8 7. s, 1(2
8 xr7 Y/Y2Y3Y4Y5 À4 8 and 7 7. x7 1(2
9 x2 Y/Y2Y3 yá5 Às - - 1(2
10 x4(x/)( x5) yâ2Y3Y4Y5 Â() 10 and 2 2. x/ /Co10 and 13
m 11 x1x,j(xs) Y1YiY3Y4Y5 Às 11 and 1 11. X4 /Coo 11 and 13 13. Xsd 11 and 14 14.x4eI 12 x/x4( x5) Y1Y2Y3Y4Y5 Â() 12 and 13 13xs /Com 13 X1 X5 Y/Y2Y3Y4Y5 À] 13 and 1 1, 10. 11, 12: x5 /Co.0 13 and 10d 13and 11e 13 and 12II 14 x/xS(x4) Y1Y2Y3Y4Y5 Â() 14 and 11 11. x4 /Co
572
X5X6 v X}X3X5X6! Â 1
X 4XSX6! Â2
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
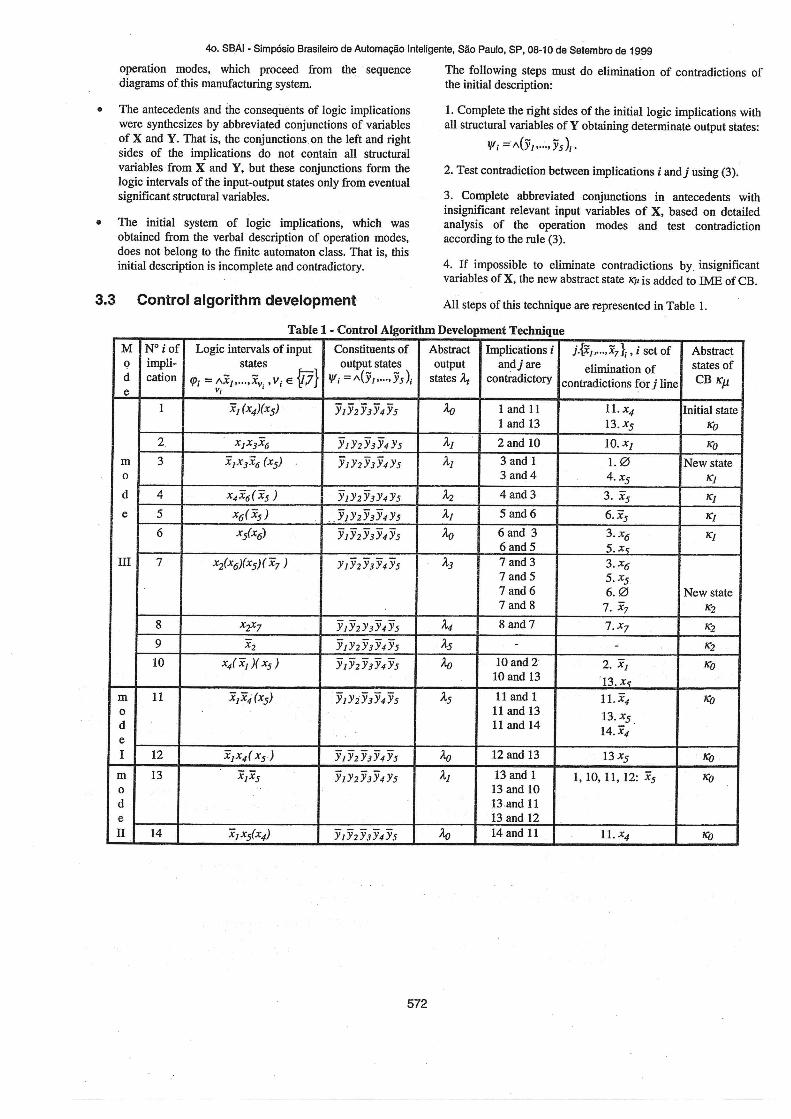
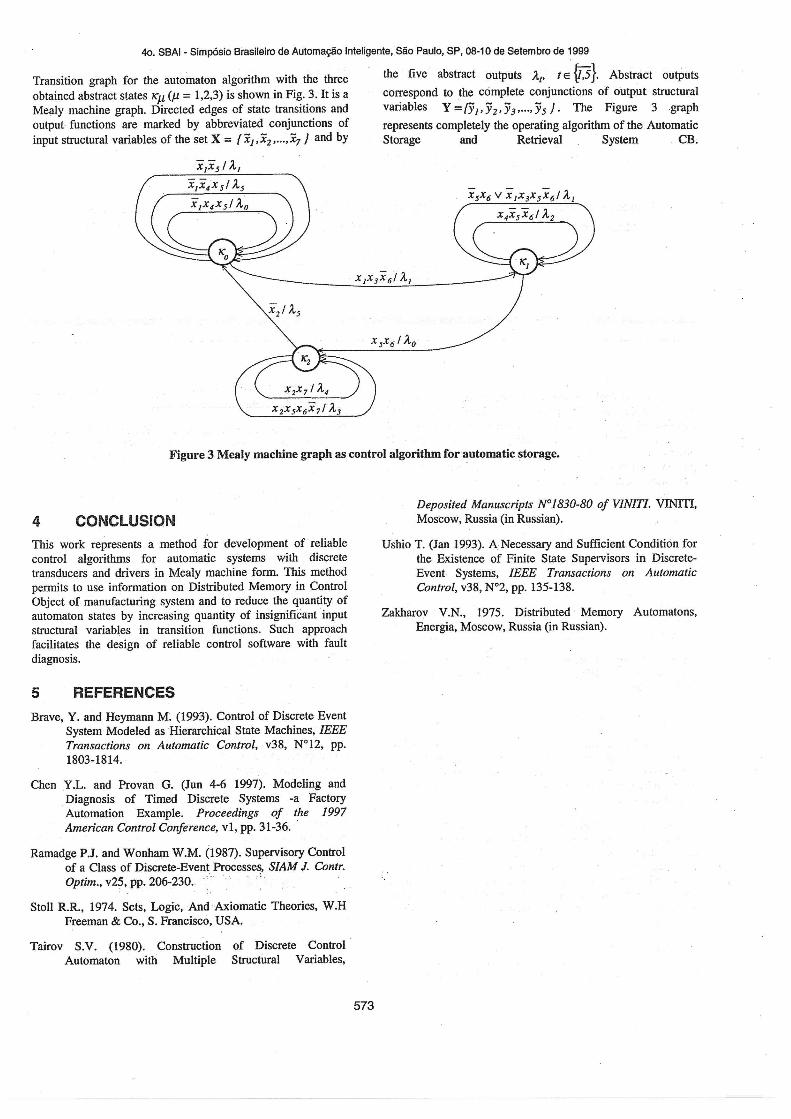
Transition graph for lhe automaton algorilhm with lhe three lhe five abstract outputs Â." tE {l:5}. Abstract outputsobtained abstract states K:J1. (j1. = 1,2,3) is shown in Fig. 3. It is a correspond to the complete conjunctions of output structuralMealy machine graph. Directed edges of state transitions and variables Y fYI'Y2'Y3 , .. .,Y5 } . The Figure 3graphoutput functions are marked by abbreviated conjunctions of represents completely lhe operating algorithm of lhe Automaticinput structural variables of lhe set X ={xl :X2"":X7} and by Storage and Retrieval System CB.
X}X5!Â}
Figure 3 Mealy machine graph as control algorithm for automatic storage.
4 CONCLUSIONDeposited Manuscripts N°1830-80 of VINITI. VINITI ,Moscow, Russia (in Russian).
This work represents a method for development of reliablecontrol algorithms for automatic systems wilh discretetransducers and drivers in Mealy machine form. This melhodpermits to use information on Distributed Memory in ControlObject of manufacturing system and to reduce lhe quantity ofautomaton states by increasing quantity of insignificant 'inputstructural variables in transition functions. Such approachfacilitates lhe design of reliable control software with faultdiagnosis.
Ushio T. (Jan 1993). ANecessary and Sufficient Condition forlhe Existence of Finite State Supervisors in Discrete-Event Systems, IEEE Transactions on AutomaticControl, v38, N°2, pp. 135-138.
Zakharov V.N., 1975. Distributed Memory Automatons,Energia, Moscow, Russia (in Russian).
5 REFERENCESBrave, Y. and Heymann (1993). Control of Discrete Event
System Modeled as Hierarchical State Machines, IEEETransactions on Automatic Control, v38, N°12, pp.1803-1814.
ChenY.L. and Provan G. (Jun 4-6 1997). Modeling and.Diagnosis of Timed Discrete Systems -a FactoryAutomation ExampIe. Proceedings of the 1997American Control Conference, vI, pp. 31-36. .
Ramadge P.I . and Wonham W.M. (1987). Supervisory ControIof a CIass of Discrete-Event Processes, SIAM J. Contr.Optim., v25, pp. 206-230. ' d \
Stoll R.R., 1974. Sets, Logic, And .Axiomatic Theories, W.HFreeman & Co., S. Francisco, USA.
Tairov S.V. (1980). Construction of Discrete ControI 'Automaton wilh Multiple Structural VariabIes,
573





























