Embed Size (px)
Citation preview

Contribution to the synthesis of stabilizing transformers andRC circuits in electric machinery arrangementsCitation for published version (APA):Oen, T. T. (1961). Contribution to the synthesis of stabilizing transformers and RC circuits in electric machineryarrangements. Nijhoff. https://doi.org/10.6100/IR30017
DOI:10.6100/IR30017
Document status and date:Published: 01/01/1961
Document Version:Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:[email protected] details and we will investigate your claim.
Download date: 28. Aug. 2020

CONTRIBUTION TO THE SYNTHESIS OF STABILIZING TRANSFORMERS AND RC CIRCUITS
IN ELECTRIC MACHINERY ARRANGEMENTS
PROEFSCHRIFT
"fER VERKRIJGING VAN DE GRAAD VAN DOCTOR
1N DE TECHNISCHE WETENSCHAP AAN DE TECH
NISCliL HOGESCHOOL TE EIN DHOVEN, OF GEZAG
VAN DE WAARNEMEND RECTOR MAGN1F1CDS
DR. IR. W. L. H. SCHMID, HOOGLERAAR IN DE
AFDELXN"G DER WERKTUXGI30UWKUNDE, VOOR
EEN COMMISSIE UIT DE SEN AAT TE VERDEDIGEN
OP J)TNSDAG 25 APRIL 1961, DES NAMIDDAGS
TE 4 UUR
DOOR
TAN TIONG DEN 'I': L ~'n(T ,;:, o~n(,(: H N l SC l-:l. IN Gl';Nl E U Ii.
GrrBOnEN T'll ~:.;r1)1~A,MA1U
'S-GRAVENHACE
MARTINUS NIJHOFr
196 I

DIT l' H OEl':;ClIH 1)''f IS GOEDGEKE U RD DOOl< DE J'ROMOTOI{
PROF. ])J\. TR. J. G. NIESTEN

The author is most grateful to Messrs. N. V. Eledrotechnische Industrie voorheen 'Willem Smit & Co., Slikkerveer, Holland, who enabled the achievement of this thesis; in particular, he is greatly indebted to Dr. Ir.]. Gilt ay for hiE.; criticiml and encouragement

TO MY PARENTS
TO MY WJFR

CONTENTS
SUMMARY .•.......•... -
Chapter 1
TRANSIENT PERFORMANCE OF A CONTROL SYSTEM
1.1. Introduction. . . . . . . .
1.2_ Overall inverse transfer function
1,3. Wyschnegradski diagram .
1.31. Parametric equations.
1.32. Interpretation. . , .
I A. Pedormance criteria . . .
1.4L Analog computer mechanization,
1.42. Mathematical expressions for the integral of squared
5
7
10
10
12
16 16
error. . 17
1.5, Bode diagram .. _ ....... , , __ . . . .. 19
Chapter 2
CONTROL AMPLIFIEll WITH STABILIZING NETWORK
2.1_ IntJ.'Oduction. . . . , 21
2.2. Transfer function of the control amplifier 22
2.3. Transfer function of the control amplifier with the stabi· lizing network . , . , . . , . . _ . . . . . , . . . 25
IX

2.4. R/:alizahility domain of th~ C\hbili~ing network. . . . . 33
2.4 I. Stabilizing tmmJorrncr. . . . . . . . . . . 34
2.411. M llttwrn<l.tical cxpressions for the tran:;for-il"H:r parameters . . . . . . . . . . . . .. 34
2.412. H.(;alizability conditions. . . . . . . . . . 35
2.413. Provisionallimit5 and S()IrW Himplifications. 39
2.414. Note on th,~ (ksign of the stabili~illg fidd windin/S 40
2.42. Stahilizing He circuit 42
2.421. Math,~matical Holution for the RC <;ireuit parameters . . . . . . 42
2.422. Healir,ability conditions. . . . . . . . . . 43
2.423. P[,ovisionallimits . . . . . . . 45
2.424. Note on tfH~ !lcSigIl of the stabilil.ing fidd winding 45
2.43. Comparison betwl~('lI sLtbilizing tran5-forn}(,r a.nd He circuit . . . . . . . . . . 46
2.5. Determinatiull of Ihr~ parameter values 47
Chapter 3
STABILIZING -rHAN',POHMER DESICN
3.1. introduction. . . . . . . . 49
3.2. n(~sign with complete fn"l'dom 50
x
3.21. Core-type transformers with one and with two rectangular coils; shcll-type transforIl1cr wit.h rectangu-lar coil. . . . . . . . . . . 50
3.211. F1HH.lamcntal equations. . 50
3.212. Sollltion . . . . . . . . 53
3.72. Con:-lypc transformers with One and with two circu-lar coils; shellMtYJH~ transformer with circ\lhJ.r coil. 57
J.23. N()llI(jg-rams and gn~phs 59
3.24 . .l)(:~ign prllecdufe . . . 61
3.25. Remarks on air g"p and dissipation 72

3.3. Design with constraint . . . . . . . . . . . . .. 72
3.31. Dimension .atios of the iron Core specified 72
3.32. Punching of the transformer laminations spe6fied 76
3.33. Iron core specified. . . . . . . . . . . . " 76
Chapter 4
CALCULATION EXAMPLES AN'D EXPERIMENTAT. R£sur.TS
4.1. Introduction. . . . . . 79
4.2, Current regulating system. , . . . . . . . 79
4,21. Open-loop frequency-response function. 79
4.22. Determination of the parameter values. 8 I
4.23. Justification of approximate trH.nsfer function. 83
4.24. Design of the stabilizing transformer. 84
4.25. Experimental results. . 85
4.3. Voltage follow-up system . . 88
4.31. Overall transfer function 88
4.32. Wyschnegradski diagram . 89
4,33. Dynamic effectiveness . . 9[
4,34. Justification of approximate transfer function. 95
4.35. Experimental results. . . . . . . . . . 95
REFERENCES. • . . . . . . • . . . . . . . . . • . • 98
SAMENVATTING ••.•... , ............ 100
XI

SUMMARY
In electric machinery anangements constituting control systems it often occurs that the power amplification is achieved in ;;evencl amplifying stages. The first amplifying stage or the first two stagef; are frequently realized by a rotating amplifier witho\lt feedback effects. If in this case the control :>ystem is not stabk or too oscillatory, it has then often been found to be useful to derive from the output voltage of the above-mentioned control amplifier an. mmf forming a negative feedback in series with tlH~ re~uJtant input mrnf of the control amplifier concerned with the aid of ,\ stabilizing t.ran5former or a simple stabiJ.i;,':ing RC circuit; the, steady-state perfOl:-mance of the control amplifier, however, is principally not affected, The present thesis if.; restricted to control amplifiers of the above-mentioned type and to thl' ;~foresaid 5tabilizing networks.
Chapter 1 presents some principles of the theory of lirl(,ar control systems which are applied in the calculati(m examples. It starts with the derivation of a theorem by which the overall inverse transfer function of a control system Can be obtained from a gener, ali;,':ed block diagram in whiCh the influcnce of the input signal truv~b di,ectly along one single path to the output_ If this latter premisE' is not satisfied by a given control system as a whole or if there is no need for thc overall inverse transfer function to be determined, the theorem may be applied to only part of thfl sy5t!:lm.
Then it is shown that the stability of,~ control system having tW() flee parameters can be investigated by me;mS of the Wyschncgradski diagram on the coordinntes of which arc plotted the free "ystem parameter~_ Regions of stability, if any. an~ found OIl this diagram_ In a region of stability th(' free parameters an, given such values that the effectiveness of the control "Yotem is satisfaetory_ For obtaining the relatively mO'$t favourablc adju;,;tment in a region

of stability, "orne suitable pcdonnallc(o criterion i5 n~(luin,~d. In particubr, till' integral of squan~d error critcrion i~ di~G\N;(~d m()1"e c!os(-'\y, which criterion can I)(~ cVllluatcc\ eithe, by nl(~ans of an (d(~clronic analog compuLer or by aritbmetic
Finally, tlw Bode diagram is bridly described. Herewith, ;1.
~uitablc "d. of values for the fn.'(·· system parameters m;.\y IJt~ found by applying :tpart from ;\ stabiHty criterion SC.llTl(·' rksign criterion on Utis frcquencY-f(':-;POIISc b;t~i".
In Chapter 2 1h~ combination of t.he control amplifi(·r ;\ml the ~tabilizillg network is d\'alt with as a single unit. First thc multiple illput to output tnl.ns(m· function of tb(~ control o.mplifier alolle is derived, tl](/ IIlagnctic coupling b(-ltw(!cn the varjoll~ control-field winding" beiIlg takl,n into account. Starting from Lhe obtained n,htionship the tr,\n,kr function of the control amplifier with i;h() stabili&ing wltwork is found.
Tlll~n a c()rlsilicration is givell for th(~ reali&abiiity domain of the ~hbilizing network al:;o in connection with the) requirement of ;1
lirnitcd clissipatiu)l. Taking into account th(~ condition that tl\(·~ ndwork pJ.ramctel"." ('!\eh of them being in a ccrtain rebti.op-,;ldp to I he transfer-fnndion parameter:>, must be physicldly realizable ,mel that the (lissipation in th,\ network under :stc,\.dy-sl8.Le conditions should be lwlow a permissible amount. limits are fOIllHI within which thc LI'clllSfel"-functioll parameters are to be chosen. l~r()rn tlillse considcrati()rIs fO!' the stabilizing t.t<J.rlsfol'mer it follows that, fOI- obtainillg cither a minimum dissipation or :J minimum ~iz(·, ()( the transfOn1wr, a quantity of CO]lp(;r as largc as po~sibk is to be used for the, sLl.bilizing field winding of the control amplifier. In the case of the stabili1.ing He circuit it I:; found that, in ord.er to obtain a minimllm size of the capacitor and a mini.mum dissipal.ion in the potllT\ti()m(~ter, if any, a )Illmber of turns for tlw stabilizing field winding of thc control mnplificr as large a~ p()s~iblc i" rlu"iI'<lhle. In contrarli:;tinction to the silwl Lion with the ,;1:abilizing tr<Lll:;former, tlw win) section of thi, winding is subjed to :l lower limit; a ~('dioll exceeding this low(~r limit implic·'s ,ITI inefficient US(~ of the copper material. From comparative con:;idcrationg it appuHs that tIl(: ~tahilizing transf0rl11er is to bt.· prdern'd to the stabilir.ing He circuit in many n·sjlccLs. It appeal's tmtltcr that, jf ,\ solution with it network o( ()ne type h,\~ been found, a "olutiorl consi.sting of a l\(.~twork of the otl)('1" type )JI'oviding th(·~ sarnt: control pn)lwftics with tJl(~ same stabilizing field winding rr\oly not always exist. This
2

chapter is concluded by a procedure for determining the values of the transfer-function parameters in such a manner that these values result in an acceptable dynamic effectiveness of the control system and, moreover, correspond to network parameters s;ltisfyi,ng the conditions for the realizability and the dissipation,
Chapter 3 contains the design of the stabili;>;ing transformer, the values of the resistances and the coefficients of self-inductance of the primary and secondary winding ,end the magnitude of the prE:magnetizing current in the primary winding being given. On account of the premagnetizing current it is generally defdrable to provide the magnetic circuit with an air gap having a most favourable length, Two cases are considered here_
In the first ease there is a complete freedom in choosing the ratios between the dimensions of the iron core. By means of the theorem of Lagrange multipliers the ~;onditions are found for obtaining minimum costs, minimum weight or minimum volume of the transformer materiaL These conditions arc qualitatively the same for the three criteria. Due to the nonlinear magnetic properties of the tmnsfotmer iron, the ratios between the dimensions of the iron core depend upon several data which may be combined in one single parameter. Moreover, in the case of the minimum-cost criterion, these ratios naturally depend upon the relative price~ per unit vohlDle of copper winding and sheet·steel laminations; in the case of the mirlimum-weight criterion upon the rebtive ~pecific w'light:;. It has been found that one of these optimum ratios can be determined from two nomograms, the othe, ratios following directly from this one, The absolute magnitude of one of the dimensions of the iron core is obtained from another nomogram; finally the design of the primary and secondary winding is obtained readily.
In the second case a constraint is given in the form of the prescription of the ratios between the dimensions of the iron core, of the punching for the transformer laminations or even of the whole iron Core. Assuming that the winding window should be completely filled in the first two subease5, the conditions for minimum material-volume are readily determined by the requirement that a 5uitably variable geometric dim!:'l1sion of the transformer should attain a minimum after which the stabilizing transformer may be designed in a simple manner by U'sing graphs.
Finn.lly, ebapter 4 is devoted to two calculation examples illl)s"
3

trati I'lg the fot'cg-oing and to the experiment::; for verifying the re!;ulh tlJ(:~rc()f. The example'S compris(~ a current r(~gulating sy~te!11 n.nd a voltage tollow-up syst~ml. In these :>y~h!fllS the first tW() amplifying!>tagcs have b(~(~rI realized by an ampliclyne, wIdth energized an c'xcit(.'r which, in turn, enc,~rgiz~,d a d-c generator. The arrangel11~mi: of the {:urrcnt rq~\lluting system comprised a stabilizing transformer c\csiglwd t() this encl. An flcccptablc dynamic dkctivcncss of the voltage follow-up Sy~h'Hl was obtain(~(l hy a stabilizillg He cirelli L It (lppl~an,d thd: a :;,ltisfactory awccmcnt exish l.a-iwccn the experimental results and those obtained with th(·~ aid of an dl'ctronic simuht()!'.
4

Chapter I
TRANSIENT PERFORMANCE OF A CONTlWL
SYSTEM
1.1_ INTRODUCTION
As is well-known, electric machinery arrangements often COll
,titute control systems. The control systems to be cOD.:>idered here can be defined as systems in which the outpul ,;ignal (controlbJ variable) or some function thereof is fed back continuously for comparison with the reference input (which is some function of the input signal) and in which the difference between these two quantities (error ~ignal) is used to control a source of power for minimizing the deviation of the output signal from its desired value. I'urtherrnore, according to the prnminent function of the control system a distinction may be made between follow-up and ,egI1-lating systems, which arc principally characterized respectively ;lS fol)()w,;:
In the follow-up systems the output signal sholl\d follow as accurately as possible the input signal which it'> cssentblly variable. In the regulating syotems the output signal should t(>m:lin as con~tant as possible in spite of certain disturbances in the system, the input signal being set at a fixed value.
In accordance with the definition of the control system given above, at least one feedback loop must be present. FeedbRck may give rise to o:;cillahons of increasing or constant amplitude in any of th(" time-dependent variables, the first case being termed instability and the latter marginal stability; for our purposes both (~ases make the control system of no value. If a control system docs not produce spontaneously oscillations of increasing or constant amplitude, the system is said to be stable. However, not all stable system~ a,n~
equally useful for reducing quickly <~nd accurately the deviation
5

in the output ,;ignaL The extent to which the control sy~tern is performing its function in this re!>pt~ct i~ dcsignated "s the df(~c'-ivl'nes~, Tfw dyn;lmic effectiven(~ss is considered to b<:', s,J.tisbctory if some specifications an~ mct by the transient r!;'spoIlsC to a specific input or dist\lrbanc(~ signal.
The transieIlt response of the cont.I'oi system will be stndied here for a. sLldden chang" in t.h(; input signal or distmbance signal. In order to makt:> rna.thcmatical expressi(~ns easy, the step-hHl(:i:i()!l changp; are supposed to OCC\lr only once and to b(j ,n small, that the system may be com,ickred to be a linear ,ysi:em in the restricted range of state,; ttn'()lIf;'h which the sy!:\hlm pa~se,~ in COIl,(~(pleTlCe
of the di,turl.HUh~C.
In ,;ynthesizing control systtorns thc ovcmll tn\flsfer function of tllp syskrn or of p"rt th(~re()f (for instance in c(Hlverting block elia· grams) may be n~qllired. A theorem will bo given for obbining the rcciprocal (:xprcs,ioll of thi~ ovt'r,lll transfer function, the so-called overall inverse transfer 'f\111dioIl, from thc transfer functions of the component parts,
It is of frequ(mt occurrence that .. n acceptable <:ff(~div("Il(:~ss of a system cannot be achieved withnllt special mea';llr(:~S. In this case we can consider to provkh~ the system with a sLabili:oing ndwork by which the ovc:ntll tn:tnsfcr function comprises a Hum b(,r of new paramet(~rs, which in principle can be cho8en. with freedom and, tfwrdoI'c, are designah~d as free panUJ1!.~u:r". If in general n is the number of these p'l.mmctcrs, then n:giow; of stability and instability can in. wmcral be indicated in the tt-dimem;ional space having coordinates on which thli parametcrs are thought to b~ plotted. In the literatun:> SlW(:i~il attention is given to the ca~(~ 1'1 '-' 2 and, in addition, Uw cocfficients of the denominator p()lynomial of tll(~
overall transfer function are linear functions of the free paramet(~rs [1{1-3]. TTl this case the configllro.tion in th~ two-dimensional space bears tlH' name Wyschnegradsky diagram. In view of tbe bet tho.t this diagram will h(~ applied to the investigation of the stability of the follow"up system descrilH\d in the calculation exampk;, thi,; subj(:ct wlll be treat<~d more closely,
After finding a region of stability the free parilTnders should b(~
giv(~n such values in this regioll, that the dfeclivcncss is satidactory, For comparing tlll': dynamic effectivencss with various o.cljustmento; in a region of stability, use m\lst be made of ~ome suitable mea:mre of errol'. As ~:t criterion for th" optimum tnLTlsient response to some
6

specific input it may then be "tated, that tbis measure of errol' shall be a minimum (performance criterion),
Finally, we will briefly discuss the Bode diagram which will be used in obtaining an acceptable effectiveness of the regulating system treated in the calculation examples. The application of a.
stability criterion and some dt,sign (~riterion on this frequencyr!'sp()n,;~ ba,;i" may lead to a suitable set of valll~'; for the free system paramders.
1.2. OVERALL INVERSE TRANSFER FUN CrION
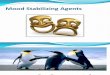
Fig. 1.1 shows the generalized block diagram of a control system. In this system the influence of the input sign,d R travels through the blocks having the transfer functions G./, (i = I, ... , n), briefly termed (;rhlocks, along one single path to the outpllt. Tl)(' ontput signal of block Gt is fed back through block H"j to summation point
c
L----------1H,c,I-----------l
Fig. 1.1. Generalized block diagram with one single signal path froTT! inp"t to outl',)t.
j, (j = I, ... , i), the output signal E j * of which operates as an input signal for block Gj . The output signal of t.lw control system IS denoted by C.
The overall inverse transfer function RIC of the control ~y:;tem I'an. be found as the sum of a number of terms. Each of them corre"ponds to one of the possible paths from the output to the input. On such a path ,J" G"block is traversed only ag<~iu~t and an H-block only with the direction of the signal. The term concerned comprises a number of factors, e,J"ch of which corres-
1\1: Note (hilt 1;~1c.~h time-dependent val'i;"J.ble:-. i':S dewJtcd by a latin mallu:-;rHL~ and Ih~
Laplace transform the-rf!of hy thC:': (:()"I:'~:$p'-"lIdil1g <~~pitJ.l.
7

ponds to a (;- or H-function found on Ow givcll path. A fudor corrnsponclillg lo a c.:-functiou or ,IT! II-function is eC[11al to tlllO inv(~t's(; value' of the' function or to LhlO function itself n~speclivdy.
The proof of this theorem wili be shown h,'n,' by induction. With rdcrel\c(.~ to fig. 1.1 the foliowing n~lati()n" are readily found:
(1.1)
£} ~ (;J-dlj-I .. ~ (;'#;,11:.';, U - I, .. " 11), (1.2) .1, J
where
and
Equation:> (l.2) ~Ir(~ (kvdopecl as follows:
(;3H~,1 F~ 1 ••• +G,,-lH n·-1,I.fn - 1
+ (;,Jl n . 1 E,,--N. -(:llil I (I I (;2112.2)Ed- ... --[--(;n-lffnl,2E,,--1+
1 G.,,1-l'll,~ h'/i--O (1_3)
(;" II~n"1+ ·+·(1 +G.nfl"",.)Fn=O
Now con"ilkr lhe dctenninilili.
1)(le)..,..,
I-I-G1HJ ,1 (;J[~,L' . ·Gk--··zH/>;--~,) ---C 1 1-1-(,'2112,2- - -Gk-~rrk--.2.2
o -(;~ .. '(;k dh-"2,3
o o
o o
-G rc-2
o
(;" llh 1.,1
G k-1H k-l,~ C; f,;-1 H I,:_.1,3
(;/cHIf,1 (;,Jh.3 (;kH />;,:,
1--1-'(;,,-1.11,.-'1,/>;-1 (;/{}l k.k -1
---Gk -- 1 1 I (;k Jl k,l.;
(f ttl(' cofadol' of the clement of til" 11.11 row and t hi:~ ii,l> column of ])(lr) is designated by f)Y;', it is rcadily fOll11d thaI.
/,---1
nY'I; -"-' DU-l). I r (;,. 'I j
( 1.5)
which rd;dioll abo holds for i = I, if we dciine ])(0) -,-- 1. In partlelllar, we have
11 .1
D\':;,= I1G j • (1.6) 'i. -1
s
_ (1.4)

By expanding DOC) by the la~t row we obtain further
D(k) = (1 + G/cH/c,k)D(I,l) + Gk-lD)'~;H' After expanding D1!:'l,-1 by the last column this relation turnS into
/;-1
D(k) = (1 + GkH k,k)D(i:-l) + G/;-I L; G,Jh,JD\;·;.::_\), i··l
which, by llsing (1.5), becomes ,. k
D(l,) = D(k--l) + :E H",jD(j-I) II G,. j." 1 ',: -i
(1.7)
Considering (1.3) as linear equations in E 1, .• " R II, we get
D(I,,)
E =~H " D(n) ,
hom which, making use of (1.1) and (1.6), the overall inv(~rsf.
transfer function is found:
N. D(n)
C I, (1.8)
II (;j 'i·--1
Taking into 2.ccount (1.7) for k = n, this relation may be wr'itten a,
it D(n-I) DU-I) _. =, --- + ~ H" j ..... --C n }'-1 '. /'-'1
II Gt II Gi j .. 1 'f. ~,
or, if Ck denotes the output :signal of a control system with tlw blocks G 1, "', G /; and the aSf',o6ated H -blocks, a,
R . 1 R n R , ... _- = -.-----.+. Z Hn,J-'-: en (rn Cn -) ; .. ·1 C,-.1
(1.9)
use being made of the fact that (1.8) naturally abo a.pplies, if herein n is rephlced by k and if per definition Co eq\lld:s R.
Now assumc that the theorem applies to a number of G-blocks equal to n - 1 and less, then it is found from (1.9) that thc theorem applies to n G-blocks as will be se"n from fig. 1.1, if we verify the con"equences of the addition of block Gn and blocks H n,;' (f = I, .. " n) to a system having only n - 1 G-blocks. If 1'1 ""'" I,
(1.9) turm; into the obviolls relation
R 1 - = -G-
l" + Hl,l.
G!,
9

From llii" it <1ppear~ that the theorem is correcl for one G-bl()(;k <1]"[(1 lherefore, it "ppli!is to 2, 3, etc, G-blocks as well, i.!~. the theorem is gelHlrally valid.
1.3. WYSCHI'II\(;HA()SJ{] DlA(;W\M
Let th(1 (l(morninator polynomial o£ the ovendl ham·der function of a control system b(·'
P(s) 2,; a,sl, ,. \I
(I. 10)
wlwtc s designates th(~ complex v,.-6abk of the J _aplacc transformalion and a" (i = 0, "', n) am linear functiorl~ o[ two free parameters % and 7', which functions will be writt(:'n ,IS
(III )
It. i~ well known tll,!.l stability b a~~l1rcd if all tlHj roMs of the (~ha!'acteri.stic (I([llation - whicb m;IY be obtained by l:q uating (1,10) to );cro '. have negative 1"(1,,1 parts; root::; of tlli" kind will [)(' htidly l!:'nn(;d sbble roots,
The number of st.able root~ depend" upon the values of Hand 71.
This d('p("nckncc can be repnls(~nled in a diagram in which 'H and v ani the coordinates lInd OIl which am indicated regiorb having" (li fkrcnt nUl1lb(:1" o[ stable ro()t.~. This rcpres(:'lltation is designatnl as the WyschrH:gradski diagn(lTl.
1.31. Para11utri(' cljlwhons
In the Wy:;chncgracbki di<l.gram, region~ having a different number of ;;lahle roots an',eparated from each other by a boundary curv(' 011 which at lea;;1: one root of t.he characteri,tic equation hus only an imaginary purl. So, thl' i.·cluations in u ,l.Tld V detl'lTTlilling thi" boundary curve may be obtained by :;ubstituting iT! the c.haracteristic equation for s the purely imaginary variable iw (f lwing the imaginary unit):
P(jw) = 0
Fron1 this equation, it [(,!lows in th!: first place, that
or
10
k
L. a~i( - (ilZ)i ~ 0 i 0
(1.12)
(1.13)

with n
if n is ev!)n
if n is odd
and secondly. that
or
with
I
W ~ aBHl(- ( 2)' "..., 0 i-O
n-2 if n is even
l= 2 n- I
if n is odd, 2
SubstitutioII of (LlI) in (1.13) and (Ll4) yields
Ueu + Ve7J + We = 0 and
U aU + V o7J + W 0 = 0
respectively, where
" I Ue = ~ a u ,2t(- ( 2)'i, UQ = 0) 1: UU,2i+l(- w2)1; ":--0 "j=()
k ~
(1.14)
(1.15)
(l.I6)
V. = 1: Uj),;lf(- w2)i, Va = W L av,2i+l(- 0)2).; (1.17) bO ,---0
/, I
We = b aw ,2i(- (2)i, Wo"'-' (I) 1: aW,2Hl(- ( 2)i_ ~-I) '/;=0
Solving (LlS) and (L16) for u, and v we find for the boundary curve the parametric equation~
and
where
D", U=--
D
D" 7J=--
D'
D'Il; = VeWQ ~ VoWe,
Dv = UaW. - UeWo,
D = U"V" - UoVe,
1
) (118)
(U9)
(1,20)
(L2I)
11

Since in (1.18) u and 11 are ,~vell functions of (I), t.hc graph of (1.18) may be tnlccd after substituting successive n~al values for (I) horn ;.;ero to pJ ufi infinity.
We now cOllsiril'r a value of (.Ii for which two of ttw (ld(,rrninLl.llts ( 1 . 19), (I. 20) and (1. 21) va.1!i~ll. For such it value the third d"kr m
1l1in<lnt also vanishes and in the U1I planc a so-called sinf.{ular line (~OITi.:sjlm\(b lo it. Such line, also belong to tht: graph of (1.18) and the equation thereof may tw obtained by sulisi:ituling the concerned valur, of OJ directly in (1.15) nr (1.16), It slr()l.Ild be noted that the values of (() equal to ;.;uo and infinity always c()rn~sp()n(l to singular lilll~s. the cqu<ltiolls ()f which an: found by eqmdilJg un and an. wri1 kn as functiolls (If 11 and 11 according to (1, II), n:sF'cliveiy t() zer(). Fig. 1,2 shows a graph of (1.18): curve a b(~illg lhe IlllTlnsillg"ular v,rt and tire. lincs b, c ;1.11(1 d the sing\llar par'L
Fig. l.2. \Vy~chl'lq~,-adski dii.Lgl'nnl; curv~' a I'nl'fusontillg the !i.()Il-singu I;~r pnrt (UpOll wliil·1i pUilll /1). til(' lin"s b, " al]([ II the sini;l\l<tr part.
I .32. J ntcrprct(l!ion
An interprctnt.ioll of lhe ~raph of (1. 18) describ(~d irl lhe previous ~i.'ction will 1.)(' givt'll by means of the following criterion,
12
Tf J) a.sS\llm~s a positivll (or' ncg-ative) v,due for SOll1l~ val Ill'. of (JJ
- to which, thel"i~r()n:, correspomb a (,crtain point of the non~ingubr part of tlit: boundary CllrVl' --. then, facing the direction in which '" incrcas('.s from tb(~ considered v:duc. the kft- (or

right-) hand side of the said part of thiO curve in the proximity of the point considered has one stable root more than the right" (or left-) hand :side; the imaginary part of the [oot concerned is, at least approximately, equal to j-timcs the considered value of 0). It is supposed in this case that the '14 and v axes C(ln~titute a (u, v) ~y<;t(cm (as shown in fig. 1.2 and not it (v, #) system).
In the following a proof of thi,; criterion is given ill a m()n~ concise form tkm that given by K. Tashiro, which is referred to in [RJ].
Consider a small region in the u-v plane around a certain point A on the boundary curve corresponding to some value of w for which D d()(~~ not vani::;h. If in the region considered one moves from a point beyond the line to point A, a pair of conjugMe complex roots of t.he n roots of the characteristic equation at the firM mentioned point passes continuously into a p;]jr of opposite purely imaginary roots. Let further be considered the one of this pair of conjugHte complex rooh which at A becomes purely imaginary and equals i-tirn"~ tbe considered va.lue of 0>. At point A, the direct.ion in which an in(:rt:'roental change ow of w from the Gonsidered valu8 wit.h the real part a of the root wno;idered equal to zero i:; positive and lIH~
di,ection in which an increJJl8ntai change 811 of a with constant w
is positive define the positive directions of the axes of <t local coordinate syst8m (8('),80) or (iJo',8w) having A for its origin. In the same point A we can imagine a local coordinat8 system (8'11, ov) sirlce a (01!, 8u) system would correopond to a (v, t~) ~y5tem which ha~ been exd11ded *. The aforesaid criterion can now be altl,rnativdy stated a~ follow5.
If 0# and OV constitute a (iJu, 8v) system <I.nd n is negative or positive, then [Jw and oa constitute a (ow, 00-) or it (00', fJwl system r8~pe('.tively (see fig. 1.2).
However, it is known that with a (au., ilv) system the functional determinant
o(U, v) (hi OU -----
ow 00 (1.22) ---=_.".
o(w, a) ow 017
is positive or negative depending6n whether iJw and oa (:Ol),;titute a (00), fJa) or a (ila, 8M) ,;ystem. Therefore, it is now only to be proved that the functional determinant and D have opposite signs for the considered value of w ,d point A. This m,~y be shown by
~ TJ,c ;ituatiol1 jn thC:! (,.;1.$C of ~I ((Jv j c:rt) :=:.y:=:.tC!m will bu iOU'lHl ca~ily hy ~W(l,yiq~ till.: mirror imag(; (!f the j,:;raptl.
13

expressing in (1.22) the parti;!l derivatives of u and '/J with re~pf\d to (I) in those with re~pf,(;\: to IJ for the considered point A; the recjuired relations can he found as follows.
Let a' -I- jill bu a zero of (1,10), then the polynomial P(s) can be divi(ie(l by s - a' _ .. iw. The quotient, abo a polynomial in s, is (knoted by Q(,-). Then the following' identity holdii:
F(s) .. ,' (s _ .. fJ - iw)(!(s) ( 1.23)
It is evident l.h;it the coefficients in Q(5) <lr(l to be consid<~rwl as functi()n~; of wand cr, MOI'eovcr, th(" coefficients in P(s) depend l1pOIl OJ and cr since in principle a variation of the parameter,; '/./ and v invoiv(", a variation of OJ and a' too. However, the codficlcnts au",!, U1',l, and aw,i, U = 0, ' , " n) are independent of (I)
and (Y. Partial differentiation of (1.23) with [hP(~ct to w yields
oPts) . . . 8Q(s) --~.. -- - lQ(S) 1 (s - IJ - }(ll) . '-' •
(IW 8m
If $ i~ chosen to be e(lllal to iJ -I- jU), we obtain
J (lP(s) } ,.
t .. ····· .. ·. = - JQ((Y -I- 1(1))· ow s=a+jw
Similarly, hy differentiating with re~pect to (j howev(cr, we find
From the h,t two relation:; it follows generally, that
(1.24)
Applying (1.24) to the considered point A, ,It. which 11 = 0 and OJ has a cerbin valu~, and iiubscquently equating the) real and imagimlry parts on both sides of the equation obtained, we get analogous to (1.12) through (1.17) the relations
iJ·u 811 8u OV U. --- -I· V.·--- = -, Uo-;- - Vo
()w ow ()(Y f)'j (1.25)
and
(!U 8v Ua _.;._- + V Q
dw 8m
8u Dv U~·-;- + V ,--
(!cr e (j11 (1.26)
14

respectively. By solving (1.25) ,md (1.26) for au/ow and au/ow, we deduce
and
a2t UeVe + U"Vo ou V~ + V~ all ow = - --" .. D-- a;; - -----v ocr
00)
(I; + u~ OU. U,V. ·1- UoV" ov D ~+. D O(J
Substitution of these expre~sions in (t .22) for point A gives, after some rearrangements,
o(u, v)
o(m,a)
( (J'u (7) )2 (au iJu )2
u~-- + V e-,- + Uo' .. - + Vo -.-ocr iJo (Jcr 00
-.n (1.27)
Since in (1.27) the mlmerator of the right-hand member is always positive, the functional determinant and n consequently kwc opposite signs for the considered value of co at point A, Q.E.D.
The situation in which One side of the curve ha:s one stable root more than the other side is indicated in the graph by providing the Curve on the side with the greater number of stable roots with a hatching. Since u and v are even functions of w, the curve is traced twice, viz. at <l variation of co from zero to plus infinity and from minus infinity to zero. However, the sign of D alternates at (J) = 0 ,end (I) = 00, so that the same sidle of the curve is hatched once more (curve a in fig. 1.2); this double hatched side then has two stable (conjugate complex) roots more than the other side.
Each singular line is also provided with a single or a double hatching according to whether one value of IV is associated with the line (see the lines band c in fig. 1.2) or two (opposite) value" (~ee line d in fig. 1.2); the first cage applies only to the singular lines corre,ponding to OJ = 0 and (v ==; 00. On which side of the singular line the hatching is to be made, is evident from the situation of the hatching of the non-singular part of the figure in the proximity of the point which is located on this non-5ingular part and at which OJ has the same value as on the singular line concerned (sec fig. 1.2). Further points of intersection of the singular line., with each other need not be taken into account.
After the diagram has been provided with the aforesaid lHdching, starting with the number of t>table roots in }l certain region the numbers of stable roots in the other regions can be found without
15

any difficulty (in t11l~ figure the.~e numbers an~ indicated in circles). TtJi:4 i:-; (:vi(lcllt from the comicliTatioll of a tnln:;ition from one region to ,ulo1 hCt' ero~sing a bOllTldary not provided with a hatching just before thc' boundary, bul provided with a Hingle OT Ii double hatchint,; just. a.ft.t:r tllC' boundary. This transition TCMlltS in an increase of the numtwr of ,table. roots by one or two n'spcdivcly, while the nllHlilcr' decrcaf>cs similarly, when th(·~ t.ransition t,lkr-'S pbce in the:: opposite S(:ll.'(~' A n:gioll in which tll(: number of ,table root~ appear', to be equal to the: degree of tilt: characteriotic equation i~ a region of stability. It will be ckm jkll. such a n:gio!l may b(' lacking.
1.4, PEHF()!<MA!':CI': CIllTEI{IA
For oblaining the optimuIll tram;i(.~l1l. respons,' ill <1 region of stabilit.y some performance critc:rion mllst be Icppliec1. In the, lit.cmlure many p(~rf()!'mallee crit(':ria are kn()wn, e.g. I H4 .. ·6lHow(:v(::r, mo,l of lhem s(:','rn I'cally u~dlll only wh<:')l a ~uitable
computc!' is available. 'What cri.terion is to bc~ a.pplied depend~ nn the spl:'cifi(~:di()llo of the control ~yslcm \Imler consideration. One of t.1I" crileria, ck:oigmdul as the integral of squan:(l error critc:'rioll, Call be evaluate:(l by means of i:1.1I ,·kctronic analog comput(':T as well as by ,~rithllldic. As we will apply this criterion in th,' calculation cxarnph~, i I: will be cliscu:-;~(,d further. This criterion call be statnl <\:,; follows.
For a step-function in put signal the squan: o[ the c\l'viatioll of '-he output ,-;ign:tl f[,om its final value, intc'gratccl over tilt) time from the st.(:p to infinity, "hall be a minimum Irn 91-
Pn)c(',:dillg in this way, large dcviati()Tl~ both in tl}(l positive un(l in the ncgativ,~ :,wns8 will normally be avoided.
lAl. A -nalor; cmnputa meclumization
In an electronic an~\log computcrlH10. III all variables ()ccurring in the control system are n-~pn:scntcd, in gell(~ral, by d,:d.l"ic volta.W~s; how(·:vcr, the time remains the in<.itlpCndent V<lriablc.
Starting from the block diagram with lhe various tro.ns\(:'r [unction:> of the building blocks of a control Systl'nl, (1 diagram of the compnt.m" sdup is developed in wtlich the compuh':r components are eO]Jm:dccl in acconhnce with the block di<Ignlnl. It may he 1I()1c(1 hcre that the: transfer functions of the huilding blocks should be realized in such a manner, that the adjustment of en.ch of th(~ frc(~ pammet<:rs to be studied is as dimcl as po",ihlc [R 12, 13]. Ttwn tlt(: quantitative a.djustment of the kn()wn paral1let(~rs may
16

be performed, so that subsequently the analog computer providet> the possibility of studying the free parameters.
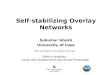
for this purpose a step-function input signal r(t) is fed to the analog of the follow-up system after which the course of the output signal crt) may be visualized by meanS of a reco,ding device (see fig. 1.3). A" all. example, the integral of squared error criterion will be applied hcrc. The function crt) i~ added to an adju~table voltage (~(lU,Li t.o "'- c(oo), after which the sum operates as each of both inputs of a multiplier, the output of which is integrated over the time, Finally, the integrator output is recorded fb fl. function of
"" (J"'J/Qg of ·toliOW-lJp system
/ !cm- c{wJj;dt 'I
Fig. ] ,3. Ana]og computer seU,p for the evalu'ltion <If th" int"fintl of oquare,] error criterion,
time, The fact that the integration cannot be (~,<rried along to infinity i~ not an obj,cc;tiol1, !t jg sufficient to carry out the integration up to the moment upon which the tr'"f\;;ient. phenomena may be considered as practically died out; this moment can be dMived hom the visua1i2;ed course of the integrator output or of the output signaL The free p,rmmeters are adjusted in a region of ~tability so that an (absolute) minimum is found, Then the set of values of the free parameters is read from the computer.
1.42, Mathematical expressions tor the integral of squared error
Let the overall transfer function of a control system be m
C L b,s' "j,::(j
(1.28) R n
:E als·' ,,-0
in which rn does not exceed n, a condition which ·is easily satisfied in practice. Then, if the input signal R is a unit-step function at the time origin t = 0, the output signal C may be written as
m
:E hiS' C = _~.~.: 0 ... __ , .,
s 1: ajst i-()
(1.29)
17

Assuming that t!tf~ sy~Lem is Rtablc, the Meady-state condition is expressed by
Du c(=)C'""-.
ao (1.30)
The Laplace transform of the deviation of the outpuL signal from its final va)\l<' has, hking into account (1.29) and (1.30), the following form:
with
'11.-1
l: b~si 8{c(t) - c(=)} = ~.-- ,
2,; al.s! ·1 ()
, /;0 b.,: "" /lIH - ---aHl, (i = 0, '-', n - 1)
ao
bt-t·l = ° if i > m -_. 1.
The integral of squared error
j "" f {c(I) - .:;(oo)}2dt ()
(1,31)
(1,32)
(':<ITI b(~ evuhl'ltt~,1 ill tlefrrlS of the coefficients ai, U - 0, ... , n) :111(1 I);. U::::7 0, .. '. n - I) with the aid of n-row determinant" [H.14] ~lk follows:
where
(- 1)" 1 II' I =....!....-----'----H ' 2an
an-l Cl,,-3
an an-2
J-l--,,- 0 an 1
0 a'fl
0 0 ...
(Hurwit;c' determinant) with
( 1.33)
al-p,
a2 n
Cl3-n
a4-n
ao
while H' is obtained from H by rephcing thr' clements of the first row by 112(-,,-1). [;2(n-2) • .. " flo,
18

where i
Bj = .:E (- I)k b;~"b~ 1,-0
with b; = 0 if i < 0 and if i > n - I.
For numerical c'l.lcuiations of (1.32) with n c::;; 6, the following expression can also be applied successfully [R 15J :
1 = __ • - a ds + lim _ s b, - b" I f g2 g2 ,,2 ,,2
4nj f ef 0 $'->00 21/ Q
(L34)
r
Herein te (or g.) and to (or go) designate the sum of the terms of the polynomial in the denominator f (or numerator g) of (1.31) with even and odd exponents of s respectively, while r denote'S a closed path of integration lying in the s plane, which enelo!;!::, all zeros of I Q but none of h In (1.34) the contour integral may be found casily by applying Cauchy's residue theorem, while the evaluation of the limiting expression does not give risc to any difficulty since the degree of the numerator does not ex!;eed that of the denominator ao; Can. be :seen from (1.31). Various methods for the calculation of the integral of squared ertor are known in the lite-mture, e.g. [RI6-l8J.
1.5. BODE DIAGRAM
The block diagram of the regulating systems considered here is frequently capable of being converted into that shown in fig. 1.4. In order that the output signal C should be as independent as p08sible of the disturbance signal R' at a constant input signal R,
R'
~ c
Fig. 1.4. Converted block diagram of 11 regulating sygtCIn.
the variable E' - which i'S the sum of C' and R' - must rcm~l.in as constant as possible_ In other words, C' should follow the variation,; of R' in an opposite seIJ.~e. Consequently, when studying the transient performance, this regulating system may be considered as a follQw-up system with R' as the input and C' «:; the output signal while R i::; considered to be zero.
19

The tramient p,,'rforrnancc of this follow-up system can be analyzed by means of characteristics in which the magnitude and tiJ(~ jlha;;<,~ angie of the open-loop fn~(l\lency-n\~l)(l1"l"\ function, which nlay be obtained from the open-loop transfer function (;lG~fl by rcpla6ug s by a purely imaginary arg\lment i/o ((') d('not('s the angular fre(!1H~ncy), anI plotted against the frequency. The trans;(~nt bclUJ.vi()ur of the system is c01Upit'tely dd('rrnirwd by these curves ll{ 19l1f logarithmic SC,lieS an: used for the magIli tude and the frl~quency, tlles(~ ()1Hves together arc designated as the B()(1c diagram. Usually, B:rigg-lull loga.rithms arc llsed; the magnitude
Hnd tl1" phase angle an:' given in decibels and degrees respectively. In the Ijtemtun~ mally s1.:lbility and design criteria on this fre
'lucncy-n:sprHlS(1 basi~ an: known, e.g. lEI, 20-22]. A Vt'ry simple Btability alld d(~~igrl criterion can be given for those ~y~tem~ which ,In.' s(abk l.lp to some value of the loop gain and nn~tahi<1 for hrger y,\lucs or which anI shbl(~ [()l' all vallics of the loop gain. Two Qll:l1ltities related to the Bode diagram may ttHm ~w used as criteria in the synthesi", Om, of thcse quantities is designated as th(~ ph as,,' Tnargin and is commonly defined a, ttl(, sum of 180 deg and the phase angle in deg for th(~ fmqlH:llcy at which the magnitude "quais unity. The othn q\lantity, (ksignated as the gain margin, is cit/TimId ~\S thl' mimI'; vahu' in dB of the magnitude when the fn\([\](erlcy is such th,\t tlH~ phase angle is equal to minus 180 dcg. Til,) st.ahility crit(\rion can IIOW he stated as follows.
A control ,;ystem is stable if it hit.'; i\ po.-.;it.iv() phasc margin; oth(TWisc it L~ unstable IT~I, 231- For the design criteria, it is rccommcnckd that the phae;c and gain margin should I)(~ at I(~,M (:irca 30 dcg and circa 8 dB respedively [R22, 24-27J.
These rules may n~s\llt ill a e;d of values for the fn:,- p,\r'I.m,"ters ,\fh'r whi(:h. if [c.quirec1, the effectivell(css of tht: cUlltrol ~yste1TI
may be verified, for it ~ho\lld be I'c'l.lized that the:.' p)la~(' allil the gain margi n ,tiOIl(: of U)llrsC do not provick ~\lfficicnt ba~iK for
"yntIH:'sis.
20

Chapter 2
CONTROL AMPLIFIER WITH STABILIZING
NETWORK
2.1. INTRoDucnoN
In electric machinery arrangement:> con"tituting control systems a l.ow levd of the error power is usually required for obtaining ,~n acceptable effectiveness and small control device~. However, a hi.gh p()wer amplification ratio may be implied. which lead'S t.o the usc of several amplifying ;;tage:;, e'l.ch of which involves a time lag. In cont>equence of this, such a system will often be ull:;tabl() or too oscillatory.
In the aforesaid arrangeIT1,~nb, the first: amplifying stage or the first two stages are frequently realized by a rotating amplifier without feedbilck effects such as the conventional d-c generator, the amplidyne, the magnicon. the two-stage magnavolt, the mpidyne and the cascade arrangement of two convent.ional d-c generators. If in this situation the control system is uMtable or if it is too oscillatory, it hao; often proved to b(· Ilseful i.o provide the syt>tem with a stabilizing network formed by a transformer or ,1 simple He circuit connected a, a feedback cirwit around the abovem(~TItioned control amplificr which has in general several control. field windings on the first stage lR28-31J, Tue stabilizing network produce", an rnmf from the output voltage of the control amplifier; owing to the derivative character of the network this mmf occurs only at variations of the output voltage which, in turn, are cfltlsed by variations of the res\lltant input mmf of the first stage. This varying input mmf is counteracted by the mmf produced by the stabilizing network, SO that the output voltage cannot follow the variations of the input mmf as rapidly as in the situation without stabilizing network. Therefore. the function of this network is to damp to a greater or smaller extent the oscillations in the transient
21

performance of the control sy;tl,m; the steady-stat,(, pl,rf()nnallc(~ of the control amplifier, however, is not affected in an essential Wily.
The following considerations will be based upon a cOlltrol amplifier and a slabili,,;ing ndwork of Uw type~ mentioned above. Taking into account the magnetic coupling between each pelir of !.II(, cOlltrol.field windings, the transfer function (multiple input to output opemlional relationship) of the control \lmplifit'r wit.h ttw stabilizing network will he determined. lhc is mack of thc t.rar\sf(~r function of the control amplifi('1' alone, which function will first. bt' derived. Then the realizability domain of the sLl.bilizing network will be investigated; this is of interest in connection with the dnh'rminatiOll of the values for the transfer-function parameters in obta.inillg an accq)t.able tran~ient perforll1anct~ of t.he control system under consideration.
[n thc\ di'riv«ti(ll1~ th,' control amplifier is S\lppo~(~d to b,' of thc' two-~tagc amplifier type. The conditions for the case of the singk"tage arnplifi('r ,I.TU readily found from tfH-l oht.'lim·.d n'su1ts by :';1.1 bstituting zero and unity respectively for thc time constant and tlw voltage amplification ratio of the s(c~cond stage of the twoshW' ,1mplifi,I:'r.
2.2. THANSFEH FUNCTION OF THE CONT1WL AMPLlFIEH
In deriving Ulto transfer funct.ion of the control amplifier the starting point is fonm~d by the configuration in fig. 2,1 ignoring
1.rv'I"
\~1~! , ,.J
Fig, 2.1. ,Diagram of (I. two-stage control ampli.fkr, the dott('cl l\n('o indicating the feedback stabilizing circuit.
for the time being the circuit shown dotted. This figure shows it
two-stage amplifier having on the first stage a number of Control, fjcc'ld windings magnetically coupled with "n.ch other. Thc ith
control-fidel winding is connected through a passive, linear network Ni to a voltage sourcc, U = 1, "', m),
22

For the first stage the ~ymbob employed are designated as follows'" : t:.c< = emf of the voltage source connected to the primm:-y t.ermi-
nals of network N." E 1 = rotational emf, I", '-= current in the itl' control-field winding, Zt(s) = resistance of the il.l) control-fidel winding iflcreascd by the
impedance seen looking from the output terminab back into the network N i , when the voltage ,;ource c!)rlflected to the primary terminals is replaced by its internal impedance,
F/(s) = ratio of the open·circuit voltage of network N, to the voltage JEw
L,,, = coefficient of self-inductance of the p.lo control-field winding,
We< = number of turns per pole IMir for the itl! control-field winding,
1) = main flux per pole cro!;~ing the air gap, u/. = Hopkinson leakage factor, p = number of pole pair:;, a --'- number of p,lirs of parallel paths in the d-c armature
winding, z = total number of armature conductors, n = constant speed in revolutions per unit of time of the rotor, 11 = permeance of the magnetic circuit per pole prllr;
while for the second :;tage:
£2 = rotational emf, If = field current, Rr = resistance of the field circuit, L f = coefficient of self-inductance of the field circuit, 'T! = LfIR" time constant of the field circuit, kf = rotational emf per unit of field cu.rent.
Hereafter, nonJinearities and iron losse, will not be laken into con::;ideration. It will be assumed that the magnetic coupling between the various control-field windings with respect to each other is perfect and that all these windings have the same Hopkinson leakage factor (defined as the ratio of the total main flux to the
:$ In thi~ chapte!1 without further description G:ach time-dependent varLablc will be r~pI'~:!.Cr"l.ted by ~t~ LJ,pl~c~. tr\l.n!3fQ1'\1~; while all q1J::Lntiti~~ 'l!i~O in thi~ th~!=;i!i are :!='uPPQ::;(d to be cAprc~~c~' h~ I,.mjt~ o( the r'~ti0Il.~ll:'t_e(1 GiOtai $y~t:ern, \Inl~$g othf!l'wise s,trlterl.
23

main flux crossing the ceir gap). It will further be assumed tl't<lt till:
brush(~s are I()cah-~d in t.he n(~\ltnd :1-01W" while the effects of the coils of till; !lrrnab.lte winding undcrgoing eornrnuLl.t.ion an, sup· posl,d to be negligibk. Furthermore, in the dcrivations all initial (;()wlitl()fls arc CqUH tcd i.n :1-CI"O in acco[da flC('~ wit.h tlw dc·finihon of the concept of a transfer function.
By HlCarh of LlH: IIH:o[CJ\"I of Tlusvenill w(~ find for theil,lo control· field circuit
Fi(S)h", ~ Zi(S)]", +- spw,p,,1>,
whill' to t he magnetic circuit the following rda tion applies:
(nQ) = ;1 2: W,),,' i I
(2.1)
(2.2)
In orcier to eliminate the control·field current:; 1,.'" U ~~. 1, .. " m) from (2, I) and (2.2), ,'qu,ltion (2.1) is fir..,t multipli('d by zo,,,IXc(,,) after which both members of the obtaincd equation arc totalized for all m ('ontrol·fidd windings. Thus n\l) dilnin:d:i()Tl result: is readily [ound:
U';(' I)ping rn:vln of Utl: tdaliml<;hip
pw,;A = L".
(2.3)
FLlrther, we: have for the rotational emf of the first stage the relation
Elimination of Ii) from
with
P E 1 ~::: nzrJ). ({
(2.3) and (2.4) rc:-mlts in
'm l~ Fi(S) 1: .---.5'----_ E
/. l Z/,(s) '"
pnz,1w", he. = ... -----.-
{{(j/l
(2.4)
(2.5)
In Lhis relatioll k,., repreStlnts the rotational emf of the first stage p<:'r unit curren.t in the 1;('" contwl-fieJd circuit a"> will ;IIlP",]l" from (2.2) a.rHl (2.4).
24

For the second stage of the amplifier we have
KjK) E,.=---
lTl which
• I + fiTf
llf Kr=. R j
(2_6)
(2.7)
designates the volt'lge amplification ratio of E~ to £1 under steadystate eonditions_
Fig. 2.2. G~'nemlizc~l blocl, dillgrarn ,,[ th" C()Iltrol amplifier.
Finally. elimination of El from (2_5) ,tnd (2.6) provides the relationship between E~ and E e,. (i ---,--c I, . , '. m):
'~ kJ'i(S) ]{t :B --;------ E",
_i'-I ZitS)
1::.2 = (I + s £ ,L'2. __ ) (1 + STr) .:"-·1 Z.;(s)
(2.8)
On the basis of (2.8) the generalized block diagram n:pn,sentation of Lhe control amplifi('f may be shown in fig, 2.2,
2,3. THAN5F£1{ r'-UNCTlON OF THE CONTROL AMPLIFIER WITn THE
STABILIZING NETWOH_K
We now consider the case in which apart from the m controlfidd winding::; the control amplifier has a stabilizing field winding to which the output voltage is fed back through <l stabilizing network N" as indicated by the dotted circuit in fig_ 2_1 _ The resistance, the coefficient of :self-inductance and the time constant of the stabilizing field winding will be denoted by R 8 , L8 and TS
25

resp(·ctively. H"H'alh:f, the impcdance Z itS) = £', ,;orresponding to ndwork N", (i ~ 1, .. " m) is ",;;urn!;(l tel be practically ohmic. Furthermore, th(:' inlF:·d"r1(.~t· ill consequence of the codficitmt of scJf-indllcb.ncc of Lhe amplifier wiudi.ng bdwecIl the output tc:nninals i" iplOfed since its Val\H~ ;;; VMy much lcs~ than the otl\(~r impcdances of intcn:"t:; moreover, it should be bornt, ill mind that with til(' \lmplificr type here considered t.hl) la~1. amplifying stage is provickd with a compensating winding neutralizing exactly tlw IJ.rmature reaction. l'irmlly, it should be noted that in ekcLric machinery arrangr:mc:nts t.he: control amplifier is ]tmdul by an impedance which, ill general, will be much higher than thtl resistance of the mnplifi/r wimlillg between the output t("rminals, so that the sai.d IOled cloes 1101 affeet the 'no-low.!' ennditioll phenomena (kj(Trnil1(~d by the rc\ation~ to be ckr'ivcd.
COl)sidNing tll(~ st.abilizing fielel winding U~ on (m -I- 1)\"h controlfic·]tl winding with
wc' fill(l f['Om (2.8)
, 1181'", I 1.(8) , - Aj .~--.. -.- L~ I K f L K",F,;{s)E",
7"'-+I(s),: I 1£2 - ..... -- .--------- -----.. . ... ---.. -------.. --.--...
( 1 -I- STr. I· , sL." .... ) (1 + STj) Lm+)('~)
Tnt his n:latioi\ is
(2.9)
/'., the rotational emf of UI(~ firRt stage per unit current in the sta.bili7.ing i'i("ld winding,
R,,, the quotient of k", and t.he toLal resistance of tlJ(~ith controlfi(~ld circuit and
TIJ tll..:: sum of the timc: GOl"l:;tants of the m (ontTOI-iield circuits.
Fir~t, Ow UISC of the stabiliy~ing nn(:work N s repre:;enting a stabilizing if,iIlsformer as illust:mt~d in fig. 2.3 will be di';(;11SSed, P(:rkd. rn;.lgnetie coupling bdwnen the primary and t.ltt'- secondary winding is assumed,
For the Rtabilizing transformer the following ;';YUlbob arc used: I1 ~ primary CllrItnt,
HI = resistance of tilt) primary winding, /:.2 -- rcsist;l.ncc~ o[ the secondary winding, L l = codfieient of self"inductance of the prjll1fl.TY winding, L~ ~ eodfici(::ni of odf-inductance of thll t'.(:condary winding,
26

M = coefficient of mutual inductance between the primary and the secondary wiTlding,
N = ratio of the secondary to tlllo primary turns.
rr .... '··'-----------, L I
_, _______ ..J
j<'jg:. 2.3. Dhgmm of tile SlabilLzing transformer.
The voltage ratio FlIl,+l(s) rdn.\.(:s to the no-load condition of tlw secondary side of the transformer, the secondary currcnt being consequently zero. Taking this into account we find easily
SlIM F m +1{.) = -----y;- (2.10)
and £2 = Rdl + STIVI (2.11)
with Tj' = LdNl" (2.12)
whl'r~o
RI , = Rl + R", (2.13)
if R" is the retjistance of the amplifier winding between the output terminals.
With perfcct magr1dic coupling between the primary and the secondary side of the stabili~ing transformer we have
M = (L1L~)' and
(2,14)
27

Under these conditions rdalion (2.10), taking into m:colllli: (2.11), tUniS i)).to
(2.15)
SllbscqllCIli.ly, we find in a ~impje manm,r
. l?2'(1 -/-81') £", 1.[ (s) = -....... -.-
1 + 81'1' (2.16)
with
(2.17)
N~' c- R2 + R.. (2.18)
Substitution 0[ (2.15) and (2.16) in (2.9) yield"., aftf·r ;-,()me rc,\rranw,nwIlh,
when'
:md
willi
!( I( 1 / ST) ~ K", F,(s)E", 'i I
(
..... --... --.. -... -----.---.... : -r VTI' ) '-'-"--_" .......... .
+- T" + 1'.f + l' + -r,' + AN· 1'8 s + .. I .. (-reT! 1 TOT·/-TjT+TfT,,' +1','TdsLITf(TcT-I-T,,'?"!')s:)
f., 7;,;1·"·':: .,'--" ....•..•
, ](2'
(2.19)
(2.20)
(2,21)
(2.22)
i{. is the vol taW: llrnplificn.tioll ratio of the rotational emf of til" first stag(' to llil) vnltn.p;e acros:,\ the stabilizing field windinr; producing it Ilnder steady-state conditions.
Now w(: C()lhiiclcr the case in wliich the stabilizing ndwfwk N,\' ill fig. 2.1 is rcpn.,sented by it simple RC cirC\lit Il.S indicated in fig, 2,4. TIl(, syrnbo[;c; ill this figure an) (ksignatcd as follows: C -- capacitance of th" Gl.pa.citoi', R" .~ Tco,istall(~" of t:he series resistor, if ,I ny, Up - .. t()Ld potentionwt(~r n,sist.ancc,
28

I; = rativ of thfl potentiometer resis.Ll nce, to which thfl RC circuit is connected, to the total potentiometer resistance,
Negl(~cting Ra with respect to Rp we lind
F,n+l(S) = ~
and
where
with
I + ~T Zm+l(s} =---c" , s
T = RC
R = 1'(1 - f)Rp +- Rv -I- R,,-
r------------ --j
Fi:;r. 2.4. Diagrmn 01 the stabilizing RC circuit.
(2_23)
(2.24)
(2_25)
(2,26)
Taking into account (2_23) :'tnd (2,24), relation (2.9), after _,ome rearrangements, turns into
'" K f (1 + S'T) L: Ko,Fi(s)Eol E 2= -----------" -- ." -----_!:::_"---
1 1- h + Tf + 7' + K~7's')s + (2.27)
+ (-reT! + 'reT + '1'/'1' + 7'$7'$,}s2 + Tf(To'T + 'T.Tds3
whcre
(2.28)
The relations (2.19) and (2.27) are of the "ame form and m:>y be
29

wriLll::n as
Kj(l .. +- 87) :i: Ko, Fj(s)Hc, F2 = ______ .i •... _~ __ ••. _._._. ___ ..
~ I -I- ST" -+- S~1"~ -+- S31": ' (2.29)
in which To<, T1t and T;~ are defined in the c,\~e of tho stabilizing tra nsformcr by
i~i
and in tile case of lhe slabilizing RC circuit by
T,x. .= TC .! .. Tf -+- T -+- j{E1""",
T7t ~ TC7[ -+- TeT ! TfT .! .. T"T,,',
'1';l. =, '1'f(TlJT -I- T.<7'o')'
(2.30)
(2.31)
(2.32)
(2.33)
(2.34)
(2.35)
N ow the orckro of magnitude of the qualltiti(:~s '1'~, TiJ fInd Ty will bl' compared with each other. All of the.~e (Illantili(o~ have the dimension of time and will be considen~d (I!; real positive numbers. 'fllis is allowed ~incl', a:> appear:; from tiJl: defining relationships, T~, T~ and .< un.' always ,',\<\1 ;11)(1 positive (an exception is tlH~ situat.ion with the single-stage amplifier where:' T:,: and h(~nC(l T1' nrc hero since T[ equals <lcro).
Tl}(~ fUlIcl.ioll of lll(~ s1:abili;.;ing network is to (\<\mp to a gmatiT or smalkr extent o:,;cillatiol"l:; in tlJ(~ tJ"allsicnl performance of the cont.rol ,y';lcm concerned. This implies that one of the reciprocal values of the poles of transfer function (2.29) should be larg!'~
\·n()\lgh. ~il1c(' "T" is the sum of the said reciprocal valu"s, "T" slIould Iw sllrrici(,rJt:ly large. Now the operation of the ~bbilizing network woul(l b(: mosl dkclivc if the other two n~ciprocal valuo;:; were zero, since then the denominator polynomial corresponds to only one single lagging dement. However, as :;tated bdorc:, 1"71 and T;~ are n.lwilys greater than zero.
The question might be put wbetlIer it. is possible for TS and '1'1'
to aSSUIlW ~rn<l II v<ll1l(~, compared to the value of T/X. To examine lhi~, we consider the expressions for "T", '1'~f and -r;',. In order to hav(·.' a hrgf' vallI(' for T" wilh respect to the values of T{J and Ty, alleast one: term hao to be found in the expre:;~ion for' T{>" which can be mad(·' large without lw(:'d to ,\[[\'(:1". pt'ine1jXllly the magnitude of TO and 7'y.
JO

Therefore, it must be fo\md in the term eonbiining a quantity not occuring in the expn,ssions fOl:- T~ and 'T;. In the ca~e of the stabilizing transformer this is the term containing the quantity KN and in the case of the stabilizing RC circuit the term comprising the quantity Kg_ In the ~ituation with a given control amplifier havjng f~ st<~biliz;ing field winding, the magnitude of K is fixed. Thus with the stabilizing transformer a free choice can be done for the magnitude of N, which may be made large ~n()ugh to attain the dbi,ed value of Tt)<, while with the ~tabilizing RC eirC\lit the parameter r: is ;~t most equal to unity, so that the desired value of T", can be attained only if the value of K i, ~ufficiently large.
Now, with 'TIJ and 'Ty small with respect to Ta, the question arise" to what extent the quadratic and the cubic ter'ltl of the denominator polynomial of transfer function (2.29) play a part in the transient phenomena of the control system under consideration. If thesle terms had practically no influence on the tn~n,;ient performance they had better been ncglected from the start since ()th(~rwise the mathematical derivations become unnecessarily complicated. It is obvious that the unSW\"r to the above question is intimately related to the frequency range which is of intere8t fOr the phenomena to be studied. The relation between the paramet.er:> TIX, Tp
and 'T)' on the One hand and the frequency on the other hand may be obtained by transforming the denominator of transfer funct.ion (2.29) into the corresponding frequency-response function
(1 - (.U2T~) + iw", (1 - W~7"; .::). (2.36)
r f in a frequency range of interest WH have
(2.37)
then it means that the cubic term of the denominator polynomial hit!> substantially no influence on the tn~nsient performance, so that this term may be ignored. One step further is made, if <"It all frequencies of intcr8st
(2.38)
which would meun that not only the cubic term but also the quadratic term might be neglected.
From the calculation examples it has been found that (2.37) does hold, relation (2.38), however, doeg not.. This will, in gew!ral,
31

ulso be lhe ca~e wit.1t irl(luslrial electric.: rWJ.cbincry arrang('merlls IH~c:LUse of the low frequency range of irlt.('I'e~t. In the n~majnder of this chaptl.~r Ollr' considcration~ willtherdore be restrict.ed to the case in which the' cubic ternl of the denominator ],olynomi.a\ of t1"(\1lsfn fllilctioll (2,29) may be ncglect(~d. The following thus avpEcs exactly for n1(: sii u'ltion with tfH~ single-stage amplifie,f and, with a CNtain degree of approximatioll, with tho Lw()-~taw~
arnplifi(·r: JJ/,
K/(l I· Sr) }; Kj'i(S)H" I I
I + ),T,X ·I .. s-;;;r-- .. -. (2.39)
T, 'T" and Tf, being the transkr-fullction parametcr's, wbich in the case of th(' ~tahiliziTlg transformer an, defined 5ucc(:'ssivcly by (2,17), (2.30) :1.11(1 (2.31) and in. the case of the stabilizing He circuit hy (2.25), (2,33) and (2.34). Eclatiol1 (2,39) IUlds to ttl(-' hlock diagram repIT.""~nt(ltion shown in fig. 2.5.'
~~ ~ I~c, F,(~)_ E --c, ~- Kc,f',IsJ
,
E_J;'- ~
, ·--\5' K'~~ .. · .. l E2_ -~ .. -1 :.. ~ 1"1T + sJ-r/,. r-----
~~"'I /
~~~~~.r 1"ig, 2,5. B)o"k diagram of thc COlltrol ;\.Il\plil'ier with tll(' ~Ul[)ilizing lIc.:tw()['k.
Finally, when using the ab()v(~ transfer function, thc fo.lIl)wing should be 1l0iuL In studying Hl('~ t.ransicnt performance of a control system it lTlight occur that in the frcquency r(\ngc of inten~st the anKh~ of bg due to th<' <lm\Ominator of tru.nskr functioTl (2.39) dosely approachl',s 180 degrees; this may be an inclicatioll that the Cllllie 10mn of the denominator' polynomial in (2.29) is to bl'~ taken into account. Tn thi~ case -- in<.bed, if desired, in ::tll casto's T;: is calclliaLe(1 from (2.32) or (2.35) after whieh the valid.ity of Td:ltion (2.3'/) is verifiNL
32

2.4. REALIZAIHLlTY DOMAIN OF THE STABlUUNG NETWORK
The transfer function of the control amplifier with the ~tabilizing network determined by (2.39) is characterized by the three parameters T, Ta. Hnd T~, In studying the transient performance of a control system these transfer-function parameters should be given such values that an acceptable dynamic dfectivene~s i:-J obtained. Starting from these values of the transfer-function parnmeter:; the pllrameter:-J of the stabilizing network, hereafter designatBd a<; network parameters, can he determined, However, the condition that the stabilizing network should be physically realizable involves certain re,trictions for these parameters, according to which the values of resistances, coefficients of self-inductance or capacitances of the stabilizing network should be positive. Moreover, we have the auxiliary condition that the dissipation in the network under steady-state conditions (in the case of the stabilizing transformer the dissipation in the primary winding (h10 to the premagnetizing direct current and in the case of the stabilizing RC circuit the dissipation in the poteIltiometer) :should be below a given, pennissible amount >1<. The above-mentioned conditions will be termed succes~ively the conditions for the realizability and t.he di~!Sipation, If each set of parameters determining a stabilizing network is plotted in a :space having an equal number of dimensions a~ the number of network punHueter~, the image points in this space form a restricted domain. Likewise, sets of values of the three transferfunction parameters may be represented as points in a threedimensional space in which these transfer· function parameters arc plotted on the coordinates. Since each of the transfer-function parameters has a certain relationship with the network parameters, any restricted domain in the space first mentioned corresponds with a certain domain in the other space, Sets of values of the transferfunction parameters outside of this domain need not be considered since there is no network corresponding thereto. T 1\ ~earching for sets of values for the transfer-function parnmeteT's meeting specifications of the dynamic effectiveness of the control system we are therefore eonfiTled to the said domain, of which t.he limits will be considered .
... In the ~ituati()n with th~ :'<;t;1bLli:ZIr)B" tr:-~m~f()nncr thi:=. maximum p~l'r.ni:-i'Rih1t;! di!<8i· PfLtiOl1 may b~ con::1idf.i'ed l f()J' l'f'eliminary ~yItthc~i", to be dl!:t(!l'min(o!d by thi:': 111 ..... :...i1)1I11Il
po-wer which the control ;'uu])HfLtr' Oi~I) ~lJpp~y t() the transformer. If, n.ftf.-t' i1 fil'~i ~~ilk~I
h'tti'OIl, flo tran!ifonnc-:r i~ fnHI1(l of which the opcration~l tl!!mp~rJ.tnrf! w('Julcl b~~ ~x:(~~..,,~iv!"'ly
high, thf! ~Y'llth~);i~ L~ ttl i)u rcvt::;cd by starting- h'01n n. 10w(:I' di~~ipnti()rl,
33

2.41. Stal)ilizing transformer
2.411. Ma thematical expre~:;i()IlS [or the tran:;iorrnn parameters
In the foUowinl;; tl'H) transfer-function paramders T, T" and 'I"~ are eow;id,·n·c.! tn he given, positive (planti1:ie~. On the basis thereof it will b,~ invesligated whether a n"alizahle transformer can bt) fOllnd which satisfies the conditions for the dissipation. Each of lhe transfer-function pamrm:lel's has a ccrtai.n relationship with the transfonm:r p'l.ramcters, viz., owing to tit,'. rdalions (2.17), (2.30) and (2_31) _ The operation of ,Hl ideal transformer is genemlly determined by four pammed-.(:!'''_ In order to facilitate tht~ introduction of the conditions for the reali;>;ability ,Hld_ the dissipation, tbree of the~e par:.tJllelerfi will be expn~s~cd ill the fourth param("ter with the aiel of the aforl'sait,l n·lations_ By introducinl;; til(, new dimensionless ratios
'T·e
~-t ,--~ ----, (i '-' IX, (1, 1,:, I, s, [;' and I'), 'T
all pararndcro ba ving the dimen:;ion of time are expn:!",~(l ~b
fraction'; of the t!'ansier-iunctioll pararneh!J' T_ Now, the 'luaIllilies l?21 L 2 , R l , and ~l' are chosen to be the four tmnsformer pararnelc:rs ami each of the first threl:' p'l.rarndc1·s will be exprcssc(l in the bst one. Naturally, the expressions thus found comprise also the transfer-function panunetcrs which in the fiJ':;t instance arc con"iilel'cd to be given here.
By transferring in the (~q\l'lti()nS (2.17) - taki.ng into account (2.12), (2.)4), (2_20) lind '1". = L8JH8 '-, (2_30) and (2.31) the terJ11S comprising one or more transformer parameters to the lefthall(l member and the oth.oo U:rrn" to the right·hand member, w,~ find
(2.40)
(II (2.41 )
and (2.42)
with
(2.43)
and (214)
34

From the relations (2.40), (2.41) and (2.42) the thr-ee transformer parameters Rz, Lz and R1, can be expressed in the fourth tr-aIlSformer parameter 6~ as follows.
We find for R2 from (2.18), (2,20) and (2.42), and for L3 from (2.14). (2.40) and (2.42) the expressions
R2 (6, + ~fHs 71; ~ ---,~----- (2.45)
and
L~ (¥1' + ¥f)(i - $1') -L
s .- (2 (2.46)
Then elimination of ,;., and N from (2.40), (2.41) and (2.42) yields
(2.47)
with
(2.48)
where
(2.49)
2.412. Realizability conditions
Suppo>.e the tmn"iormer is realizable, then the resistances and the coefficients of self-inductance of the pr-imary and the secondary winding are naturally positive or in other words, the parameters R~, Lz and ;1' have positive values and owing to (2,13) R I , exceeds Re- Moreover, the quantity KN and hence KN 6R. occuring in (2.41) are positive, which r-esult, in
(1) ;",
wherein ~Q' is, of course, positive. Elimination of $8' from this relation and (2.42) yields the inequality
which, taking into account (2.49), tl1rns into
6, >; - ~f'
(2,$0)
(2,$1)
Now the relations (2.45) through (2.48) will be examined Illore closely in order to verify the consequences of the fact that R 2 • L2
35

and ~~, a,e p()~itivc and R I , exceed:; Ra. With the aid of (2.46) the po:;iti venco;s of Lz leads to the ir\l~,(pHllitics
0< '::1' < 1 *, (2.52)
llSe being made of t.l1(~ fad lhat 011 account of (2,45) the following applies;
(~" -+- !;r)f. ( 2 -- ... ------z&,-- > 0
1 --1- -R$
Fnrtht~rmOJ"C, il appears from thi:; neLLtinn thllt C~ can nevt~r (\xceed th(~ numerator of the fract.ioll in Lhe right-hand member of the equation eoncnrwd. Summing up, on the basi" of relation (2,45), the following iruc'Iualities can be written for C~:
(2.53)
From the right-h~,nd inequality we may abo (kcluce a lower limit for ~\.;
(2.54)
Now we examim' what cnnditions owing t() the reotriction'l for fl' determined by (2.51), (2.52) and (2.54) (lrt) imposed on {t which can bt' inh~rprd(:(l as a function of tl.' OTl account of (2.48): lo this end
" r '\1171(1"- ..
os, {~{I 0 ,
"' !~ ., .1
l'ig. 2.6. C:mj\h of fUI)clion (2.48) with ~ $, -< 0, 1h" heavy pari" l""prcscll1"illg tile realiwbilii:y domain of th" Ht"biii,ing- t[(m.~forn)('r.
!II Thi~ t't"!ljLti·OII ulay he f·.i)II~·LI·IIl\~(} hy d<.:vch.lpll1;': ~I' which j.:, dcfilll:d il.~ the: [Clti()
of 71' \.0 1', t.I~i·~ L't.tt(':r, III tUr11, 11~·ill~ i'l(·t.(!rHlirl(~d hy p, I 'I).
36

thi, relation i~ investigated more closely. Thi:; function il has the zeros - ;f, 0 and I and the two-fold pole ~ - ;f. For the location of this pole with respect to the zeros we have the following two possibilities, viz.
'" - $f < 0 and
o <;;; C - ~f < I. The case
I;" .... ~f ~ I
cannot occur since in accordance with (2.51) and (2.52)
I;" - ~f < ~)- < L
Fir5t we consider the case
(2.55)
The plot of 1} as a function of ;1' according to (2.48) is shown in fig. 2.6 for this situation. It exhibits in the interval (2.52) a maximum value - {}maz - which may bE" fonnd ,h follows, The partial differentiation of (2.48) to 6, equated to zero yields the cubic equation in ~1-;
If from this equation in 6, only that root if; takerl, to which applit~S (2.52), then after substituting this root in (2.48) we obtain the
11. 11
I I I
1 /;,. 0.01 1~.o2 /O.OJ
1.0
j :: 08
~ % ::::: ::.-
0.5
0.5 o
1/
V k-V r:---:: V
/ / / II / 7 V /' :; ~ ~ / ~ ~ ::..::: r::-: --
ao~
Y'~ / V I II I / Ii I J1 / Jl / .If
/0.04 0IJ5 /0.05 0.07 1/0.08 /?-O'l Vii'O ..... _ V / / / / V / . , .... "','--
/ V / / /' V V
./ ,/ V ,./ V ,../'
V ./
~ ~ V :/ V
V ,;:-
004 006 -s o.oe Fig. 2.7, Maximum value of {) enabling (2.52) Lo be satisfied in the case
C - iff < O.
37

maximum y,due ()f f), which is a function of C and /;,. In fig. 2.7 Oma:f- i~ plotted ,*ainst ~ with $/, ($[ ~ 0,01, .. " 0, I 0) as parameter. Tn fl. value of f) lying between zero and fJ,n(l,x (~()rrcspond, as is evident from fig. 2.6, three real value~ of /;1', of which the two largt~~t
satisfy (2.51) and (252). Tn t.he second case in which
(2.57)
fig. 2.8 ill\l"hates the plot of the function (2.48). It appears from this graph that to each positiv~ vahl(:~ of {} correspond three real values of 6" of which, however, only the largest satisfies (2.51) and (2.52).
Thlls far, only the inequalities (2.51) ,!.lId (2.52) have been referred to in both cases, How(w(~r, the value of the paramet(,r ~I' has furthermore to sati:dy (2.54). In this re~pect it should be r\clll:d that if a transfoHm:r hlb Linder the case (2.55) (s(,w fig. 2.6) and if it corn~,p()ndf; to a point of the desc!:Onding part of the right-hand branch of the graph, ther!:O could (:xisl another transformer whidl CO!TC'~ponds to a point of the ascending part of tht~ right-hand
.. 1:' ~I 01
.-.-----~,··-··'O "{:~~-'-"-"'-"'-'-"'-f:'_~
~. ' - ... ~!,
Fi1-:. ;:>.8. Cmph of fllnction (2.48) with 0 <. ( - /;, < 1, the hoavy part r"l>t<,,,,,nling lhll fcalL,ability d<'>[T1,~.in ,.f tIl<: stabili~jng twnsfOHDC)-.
branch of the gmpll with the same value of {t, hilt lhis may be prf:vented hy condition (2.54), which will generally be the ca~e,
Finally, a lower limit 19rnin [or {} follows frol11 th'l fact- that Rl'
bas a lower limit VfJ,\UlO since
(2.13)
38

in which Rl has a lower limit determined by the maximum permissible dissipation.
In the figures 2.6 and 2.8 the limits found for {} und ';1' are indicated; the heavy part of the curve represents the realizability domain. From thi::; section t.b(~ conclusion may be drawn that, in order to find a stabilizing transformer, the following conditions must be satisfied for reasons of realizability and permissible db~ipation:
The quantities determining {} in accordance with (2.47) must have ~\lch vflllleti that (2.5l), (2.52) and (2.54) arc satisfied while, moreover, R1· must not be lower than the v;llue determined by the maximum permissible dissipation. It may be expressed also in this way that in fig. 2.6 or in fig. 2.8 a realizability dOn1f).in has to be found.
2.4l3. Provitiionallimits and some simplifications
In determining the values for the transfer-function parameter~ in the control system under consideration, for a first choice of the,;(' parameter values use may be made of a relation not comprising any tmmformer parametN. In order to find thi" relation it might be nMed that $. will generally be smaller than Cl, the magnitude of which is determined by (2.41). The.dort', (2 . .53) willll~11ally provide it lower upper limit for ~2 than (2.50). After replacing in relation (2.53) the parameter $1', to which (2.S2) applies, for a first approximation by its upper limit (unity) we find, making use of (2.44),
(2.58)
which gives for ~~ provisional limits in which not a ;;ingle t.nulsT fQrmer paJ:"arneter occurs. ConS\eqllently, these limit" may be of interest for a first choice of the values for the transfer-function parameters.
Further we may notice that r~lation (2.48) in the caSG
IE. <1:1 (2.59)
may be 5implifictl by approximation into il, <luil.tlT~.tic (Almt.ioll in ~l' ~.S
will lw rocogniznrl as follows. On account of (2.59) we have
(2.60)
If (2.54) io writtlm "5
39

th~n, from thi.~ rclatioll and (2.60), it (ollows tll'1.1:
~I' "1- V,'!',!:"
Tlli, iTl"'1u;dity will ccrt".in1y imply that the 1.(;r'ln (" oblainc;d by developing til" dm\()]J)in"tor ()( (2.48) i~ ,)"glif(ihle ,,'iill j'D~jl('ct to thi~ (lenominatoJ' liS a wlwlt:. Doing "", (2.48) i~ l'cULlccd to
H "" ._~~.!2_=!-,:L . ~lr '1'" ~f -- 2(
(2.61)
j,'rolll tlli~ ('(p1ntioll $1,1 C(ln n,~~.diJy i)(~ {)xpressccl explicitly. By illl-;cl'ting Lht:
expressioIl for ~ I' 1:111.1" JOI.lll<l in tlw l'dll'lio!ls (2.52) (ulCI (2.54) which givc' jJl thu c()ll~i(]ot'ud e:lse tile roa1i?'lbility c<)ndit\(1I18 th(, tnl.n,mn"",-
'Tllc sirllplificil.1:ioll of 1.1 H) t:xpn:ssjol~ f()t 'l} may b..:.: t:l'1.fl'iDd on in tl1.w';,o
CilMC:--: in wltich, in ilddil'ioll,
1';/ 2'1 . .": .\""
'flli~ iIlD(jl.\,llily IlOlds C(irt,dnly i( ,c:.r 2;1 h mild, Il'" th,\.11 the lowcI' limit of C;,' (whiell is determined by (2.54) in tllio case).
lL'f .- 2':-i .. -~~--- Ef ':'0"
1{c1lction (2.61) can llOW tlC written a.PPHJ:dma.tciy as
If ,''' I -- ;l·.
(2.62)
(2.6J)
Aft",' sllbstitlltill),( l:h" "x[ll'e~sion [(ll' 2,· following from (2.63) in the relations (2,52) and (2,54). we got for j) the inoqualiti(O"
(2.64)
If < Ii· Of . (2.65)
III (2.65) th" l'iHht-hall<l Ill<:m],er is, (!wing to (2.62). lower tl1:\l1 Ill1ity. Sllmmillg Lei), ull lllt! ba~is o[ (2,64). (2,65) ,\lld tJ10 hct thl\t f) h".s " low"r 1ll1ut I}",!." clm~ to tile maximum pcnnbsible disoiputiull, w" hav"
(2.66)
Thit-i TUL! bOIl gives iLl ihn c(}nsiclen~d (~<-I.t-i() the conditions for the rcal!zability and LlH: <.list;ipp .. Lioll.
2.414. N ate on the design of the stabi lizing Held winding
Tile quantity, (k,ignu.l:cd hc:n:af'lcr llo K~ and obtained by diYiding the rotational emf of the first amplifying st.agc~ by the slahilizing fil:ld-lnl11f Iwr pole pair produ(:ing it, is a mote essential concept than the voltage nmplilicatioll ratio K., defined in (2.22). Tn onkr to investigate how the primary and the S('conl.bry willding of the stabilizing transformer depend upon the (h~sign of the stabilizing
40

field winding of the control amplifier, we introduce in accordance with (2.21)
so that the following relationship between K and K' exists:
w K=-.!...-K',
R.
(2,67)
(2.68)
where Ws denotes the number of turns for the stabilizing field winding per pole pair. After ine;erting this expre"ion in (2.47) we. have, taking into account
and
(2.69)
from which it appears that the quantities deh:rmining {! (,md hence a!so(}min) do not depend upon the design of the stabilizing field winding. However, the lower limit value for 6· determined by (2.54) becomes lower according as l~ gre<~ter (lu<~ntity of copper i~ available for the stabilizing field winding since !;; (= T,,!'1') then increases, Thus, the realit;ability domain in fig. 2.6 or fig. 2.8 is enlarged to such an extent that ;), higher valll(~ of {! ,l.nd hence of R 1, may in principal be employed *. This involves the possibility oJ a reduction of the dissipation.
Now it will be investigated how the time constant T2 of th(~
secondary winding depends upon the design of the stabilizing field winding. By dividing (2.46) by (2.45) we find for T2 = L2/Rz an expression which can be repr%ented by
'PI '1'2 = . 'P2- 1/T $
(2.70)
wlll'r(" VJl (end 'P2 do not comprise ,my of the quantities Rs, La and TS'
It appears that at the same value of ~1' (i.e. of (j and hence abo of RJ ·) T~ and thus the size of the transformer decrease with all increa!;e in Ta. From the foregoing the following interesting conclusion may be draWl!.
If, in synthesizing a stabilizing circuit for an electric machinery
'lie It is ~Upposf.-fl ~n thb r:a~f. that the re.\Jliz..-..bility domain 1ie~ on tl~e de~cendlllg P~II'"t
ot the I'ight-b~~)d 1)1'~T)ch ()1 ttlt~ r:::Yi.\vh, which will u::>uC.l.lly lu.) tht' c:a~c in pr,tcti(:e.
41

arra.ngement, either a mJ.n\Dlurn dissipl1tion is aimed at or a minimum size of tilt, ~hbiliY.illg transformer is desired, the stabilizing fit:ld winding of lhe control amplifier ~hollld hc designed with a I.illl(: constant as hrge as pos~ibk Tlli'; implics that in t.he amplifier the space availabl(~ for the :>L.thilizing field winding is to be exploit<,d as rnuc!! as possible.
2.42. .Stabilizin.g HC cirotit
2.421. M;ttht,rnalic;ll solution for t.he He circuit para
melers As in the ca"e oj' tbt:' ~tabili'l.ing tt·a.nsfol'mer it will be suppo.'icd
in the first instanC(~ th,~t th(~ transfer-function paramd(.~rs T, T"
and T~ arc given, positive ql.!antlties; then it will be jllv!'~ligatcd wfwtf]('r a rf',di'l.abk He circuit satisfying the COlltli'l.ions for the (\is"ip;d:ioll corresponds to it. In contrast to t 1)(; stabilizing transfMrnCl', the He circuit has only thn>(' pamrneters which generally determine its ojlerat.ion. Vor these paramcter8 an~ ch(l~(1n the q\lal1titi(~:> <', C and R. In order to facilitate th,> introdudiorl of the c()nclitio[)s for' lhe reali"ability and th(·~ db,ipatioll, relations (2.25), (2.33) and (2.34) will h(" s()lv(~(l [Of these three network pOlra11'wh,tf.:_ ~'kr(' again, WI' illtro(\uc(: the dimensionless ratios
Ti q'l ---" ---, (i = 0:, p, c, /, ~ and $'),
T
,() Il'ta l a cnmparison with the results obtail'Hxl bd()re is facilitated.
By transferring in the (~(l\lt\tion~ (2_33) and (2.34) the terms comprising on(' or rnor(l pat;tmcters of the NC circuit. to th{: left-hand Hlcmber and the others to the right-han.d mt':rnbt'T we get
(2.71) and
;.,;s' = tz, (2.72)
where \:1 and ~'2 represent the quantitj(~s ddined before in (2.43) and (2.44). Elimination of $.' from (2_71) and (2.72) yields
(2.73)
Taking (2.28) into accollnt, C can be expn':,;sed dir('dly from (2.72);
42
t.2T c=-R.;"
(2.74)

Finally, it is remembered that
T = RC. (2.25)
Substitution thereof in (2.74) provide,; an expres"ioll for R:
(2.75)
Th\l~ the RC circuit parn.rn"ters t;, C ;lr\d R are expressed explicitly.
2.422. Realizability conditions
Suppose the stabilizing RC circuit is realizable, then the capacitance is naturally positive;
C>O
and the re"istanccs at all events do not assume negative values;
R ;;, Re (see relation (2.26))
Furthermore, the (lUantity fJ( occu,ing in (2.71) i~ p()sitive, which results in
(2.76)
(2.77)
from which it IolIow~ with the aid of (2.73). that
(2.78)
Herein the sign of equality applies to B"" 1 (relation (2.77) docs not provide an upper limit for C).
Now we verify the consequences of the fact that in the .'xprc""ioIlS (2.74) and (2.75) Cis po:;itive and R is not lower than R •. A positive value of expression (2.74) for C corresponds to
c~ > 0; (2.79)
while the fact that in (2.75) R ;;;0 R8 , taking (2.26) and (2.77) into account. yields
(2.80)
wherein the sign of equality applies only to the case in which e = 1 and Rv = O.
Taking (2.49) and (2.76) into consideTation relation (2.78) may be
4J

written as a lower lirnit for (2:
<. '- ~I I: 1,3 ,," -jf ,. (2_81)
Oil aCcoulit. of (2_80) ailli (2_81) we may sumnnri"e:
(2_82)
whereill, if tlil' right-lialJ(l sign of equality applies, also the lefthand sign of equality must apply.
From the foregoing it may be concluded that. in onkr to Iin(l a stabili"ing RC circuit, the transfer-function p,ll'a rndc(s have to satisfy (2.82) for reason, of realizabili1,y-
Th(~o;(~ i1l(.~CI\Hditil~s can naturally lw siitisfied only by values of ~'1
ilot. exu:(~din1j' J(:
(2.83)
With rcsptct to the condition for Uw dissipation two ca,C:-i may be dist-illg-uisi1('(\: fir;,t, /.' equal to unity and second, lO lying between ;l,erO and unity.
Tn OH.· C,l~,l
thl; potentiometer may be cOl1lpkh~ly omittncl as for ill~la!lCe
app":lTS from (2_26)_ Tn this Casc' 1.1'18((: i~ no dissipation at all,
Taking LIlto accouilt (2.26). it follows from (2.75) that
J{I? ~6· - .. ---" - --- 1 R~ C -
(2.84)
Apart from the fact tlllll there is no dissipation at all, the following interesting remark may be made. As appears from (2.73) the vH.hw of ( i, a~ ;;nl<dl a;; po~;;iblt~ for f:' = I, C()nscquently. with a givcn value of 41. (Lt_ given valufs of T and T~). (2 (= (1' n is also as small as possible for t' ~~ 1, so that $~ (i.e. 7~) on account of (2.44) and C owing to (2,74) have minimum values. whjdl i, genemlly VCTY ,ksirahlc_
In the case
H\(: pojulitiorn\lf"r n·,i;;t:inv' Rp will, as a tuk. be chosen as large ;lS possible in order 1.0 obtain a minimum dissipation. Thi::; impli(~:; that with a certain value of R, the series resishncccl Rv is to hr chosen zero as apv~ars from (2.26). In this cae;C it follows from
44

(2_75) taking (2_26) into account, that
~-l ~z -----
t(l ~ t) (2.85)
The r-esisbnce Rp calcub.ted from thi" expression must be not lower than the value corresponding to the maximum permissible dissipation_
2.423_ Provisional limib
With a given el, relation (2.82) determines the limits for C2 or due to (2.44) also the limits for ~~. However, if (l is not known, certain limits for (2 can be found on the ground of (2.79) and the right-hand inequality of (2.82) and thu:>, making \1"e of (2,44), limit<:> are found between which fZ mu~t lie arlywa y:
(2.86)
These provisional limits may be of interest for a first choice of the values for the transfer-function pararnt'ters_
2.424. Note on the design of the <;tabilizing field winding
In order to gain an insight into the design at the stabilizing field winding of a control amplifier to be provided with a feedback !>tabilizing RC circuit, expression (2_68) is inserted (for the same reason as that mentioned in section 2.414) in (2.83), so that this relation changes into
~ wsK' ~l ~---
Rs (2.87)
It should be realized that Rs is proportional to the product of Ws
and the mean length of turn for the stabilizing field winding, divided by the wire r;ection o£ the winding_ Taking into account (2.43) it is evident that, with a certain set of values of the transferfunction parameters T and TI>', the wire section of the ~hbilizing field winding has a lower limit.
With a certain wire section of the stabilizing field winding, a value of Ws as large as possible is desirable since this involve:; a minimum capacitance and a minimum dissipation in the potentiometer, if urly_ This may be recognized from (2.74) and (2.85) bearing in mind that in these relations $"H$ (= LsH is proportional to w~, whereas to Rs applies the proportionality mentioned beto,e.
45

Un U\l' basis of till' considerations given abov", we may ;;urnrn,lriz(~ as follows.
If, in fiynthcsizing a stabilizing He circuit for ,lfl t~kctric machinery arrang(~ment a minimUIT\ size of the capacitor and a minimum dis,ipat.ioll ill the p()tentiometer, if any, are dt>,jn'd, t1H'l"I
the ,tabilizing field winding of ttl(-: control amplifier should be cksign(xl with a number of turns as large as possibll:\. 'I'll!! wire ,celion o! thi,'i winding ll1\lst not b(~ lower than the limit associatl·>d wit h till; given ket of values of the transfer.functioll pamHH,1.crs T and TO'. However, it should be b()rTlt~ in mind that a win'. scction exceeding this lOWe>]' limit TrH:',Lns ;l11 inefficient \1,(, ()f the copper material.
2.43. Cornparison between stabilizing transformer and RC circu.il
As has bel.:n found in section 2.424, in applying a stabiJjzing He circuit the wire; sCeliorl of the stabilizing field winding :;hould be.
lIoi: lower thall a certain lower lil11it for ()ht.a.ining n. given set of values of the tran;,;f(,T'.fulld.ior\ parameters 'I' and T",. On til(; ()th('~r
han(l, :t.fl illcn:a~e in the wire sl,ction !nay kad to all inefficient usc of the copp('r l'Ilat€.'rial. Tn the (2a,(: of the stabili~ing transfornwr tlw fOl'(~g()ing dOl:S not apply.
In the situation with ttl" ~bbilizing ham;fonner a lowcr value in principal may be ChO'I.~ll for: 7'7, thun with the stabili.~ing HC circuit ~ince til(' low(,t limit of (2 is given in the first c,ts(-~ by (2.53) and in the sccolHl mse by (2.82).
It ,houlel fUfther be noted that in electric rnachjn(~ry arrangements fo( industri<ti purposes relatively large time constants are concerned, whi.ch m,LY give rise to cxpcnsive or very bulky capa(:itors; in the,;(: (:a.';C'; stahilizing transformers will llsually be morc favourable. Howcver, wit], a stabili7.ing tnlIlsfMTnCf thc dissipation in the; primary win (ling dUll 1.0 the prcl1lagneti7,iug Cl.lrn~n1: may be rnl"ll t.inned ak (l clisad vantage.
Finally, it will be ex"min(:~d wheth(~r :l stabilizing tmmJornwr applied in a giv(~n (~l(~dri(: machinery Qrrangcmcnt may principally
JH.) I'tpiac('d by a stabilizing He circuit whih~ the samc control properties arc to be maintained, To this end it should be not("d t.ha.t a stabilizing H.C circuit has 1:0 satisfy thc conditions (2.78), (2.80) and n,83). Sinc() the stabilizing transformer con"tit,\ltes t.he starting point of this cO!lsidcm.tion, the quantities ~l, ~2 and C in the afore"aid conditions will be e)(pn~ss(~d in th" VIm.meters of the tn\n,,· former and of the control arnplifi(of with the aiel of (2.41), (2.42)
46

and (2.49). The conditions thus found yield, \ifter some rearrangements, the following respective relations:
R,('T1" ·1 'T!) < I,
R2'Tl' + L2 '-
J{ 'T!'(R2' - NR.) +.L~ ~ I. L8 '
(2.88)
(2.89)
(2.90)
If not all of these conditions arc satisfied, the stabilizing tn~n$former cannot be replaced for reasons of realizability by a stabilizing RC circuit which provides the same control properties with the same stabilizing field winding.
The complementary problem re~ides in the question whether in a givtm electric machinery arrangement comprising a stabilizing Re circuit this RC circuit may principally be replaced by a <;tabilizing transformer with the same control properties. Referring to (2.51) and (2_52) we ob,;erve that fOT the realizability of the <;tabilizing transformer it should apply
Elimination of ~ from this relation and (2.73) making use of (2.25) gives
I (TO ) -- --Tf < 1. RC sf{
(2.91)
If this condition is not met, the stabilizing RC circuit cannot be replaced for reasons of realizability by a stabilizing transformer providing the same control propertic~ with the sa.ffi(e stabilizing field winding.
2.5. DETERMINATION OF THE PAHAMETEl{ VALUES
Irl this section a procedure will be described in outline which may be carried out to determim: the values for the transfer-function parameters which provide an acceptable effectiveness of the control system under consideration and which furthermore correspond to network parameters satisfying the conditions for the realizability and the. dissipation.
The procedure involves an iteration procr.ss; provisionally a
47

value is chosen for 1", which may be appr()xirn:lUdy equal to the largest time constant of the lagging dements in the electric machinery arrangement. In this ea~e th,~ factor (I + S7") in the transicr function (2.39) of tlH' control ;lTnplificr with the stabilizing network will e()mpe[l~at(; to a greater or smaller extent. thn dfl;d of this larg(>"t time constant,
Then, with the aid of (2,58) or (2,86) provi~iolla I limits ]\[ay be found Jor T;~. Iktw('(>n tlJ(>,(> limits a p!'()visional value for T;; is c\lO~c!L SLlh~eqLlelltly, with this value of T~ ~uch ;1 sci: o[ valu(;s for T anel Tex (thus 1" and T/X considered <Is the [tee syf\tem par:lmeters) is sought that an acceptabl!~ tramlcnt performance is obtained, The theory dc~crib\d in .:;h,.pt.cT I may he applied in this caSf:',
Finally, st:lrt.ing [rom the values of l' and 1"" thu~ obbimxl, W(!
dd.(;nllille t.he Cort(:ct value of 1'~ as well as the vahH'" of the: lU't
wMk parametcrs, it being considered that the conditions [or the reali7,ability and the di;,;~ipation must. be satisfied. The viewpoints tfH'n.-foT an> discl.ls>;(:d in section 2.4.
With the n,vislxl value of Tj, "nd th(! values of 7" and 7", obtained bdoI'(·. it is then verified whether the specifications of tbt~ dynamic cffcctivCllC~S arc,: ~till md. If tfw r(~Slllt is negative. the complete pnlce:;s d.e:;crib~'d UbOVf.' should he repeated on the understanding that now th(·: n~visul value of 7"~ constitute" the ~turt.ing poin L However, i[ thl'; result is positive, the whol(~ synthcsi, may be rn;lintainuL
48

Chapter 3
STABILIZING TRANSFORMER DESIGN
3.1. I NTRODlJCTION
In this chapter a method will be given for the de::;ign of a ,tabi~ lizing transformer. The values of the :r:e1>i'$tanch, t.he coefficients of self-inductance of the primary and the secondary winding, and the magnitude of the premagnctizing direct current in the primary winding ,ire the starting point. On account of this p:r:emagneti%ing current it is generally de~imble t.o provide the magnetic circuit with "n air gap, the length of which"is a design variable.
Two cases will be heated in succe""ion. In the first case there is a complet.e freedom in choosing the ratios between the dimensions of the iron core. Six transformer types will be conside:r:ed, viz. the core-type transformers with one and with two coils and the shell-type transformer; all of these of the circular type as well as of the rectangular type. In order to attain a design in a rational manner, the conditions will be investigated which the transformer has to satisfy to obtain a minimum value of a certain quantity depending upon the tr,msformer dimensions; viz. the material costs, the material weight or the material volume.
The second case refers to the design with some constrilirtt. This may be the prescribed ratio, between the dimensions of the iron core o[ a. transformer type. However, a more severe con"tr,t.irtt may be that a given punching is to be used for the transformer laminations or that even the whole iron core is specified. For these three ~ubcase" the transformer will be designed for a minimum mat.erial-volume; in the first two subcases it is assumed tlmt tht~ winding window is completely filled. A minimum amount of rTl(lterial costs, a minimum material-weight and a minimum mah:rial-volumc arc then equivalent condition~.
49

3.2. 1)1<:51(;1:'1 WITH COMPLJ,'fj, FHEJtDOM
;l.21. C()re-type irwns/urmers 1I.J1:th one and with two rectangular cozls: .\hell·lypc irwnsjorrner wilh rectangular coil
3.211. FundumcnUt! cql.1alions
TIt(, starlillg poillt will /l(' c()l1~titut<.'d by a ~('t of relations 111
which tIll., following symbols occur:
1 "'.= prcmagncti"ing din:d cmn,nt in the primary winding, N I = r(·,istance of the primary winding, R~ """ n~si:,;tance oJ tIle secondary winding, I- t = codfici(~nt of sdf-inductancc of the primary winding, 1-2 ---, codfici('llt of ,.,If-inductance of the secondary winding, 1"J - LJ/R], I.ime constant of the primary winding, 1"2 =. L 2/R 2, time con,tani: of th(" s~c()ndary winding, /1 - magnetic flux density in con~cq1H:mC(l of the premagueti%atiOI1, I'll '-" ab~ol.ute permeability of vaCLlum, /l'r, -- rdative (flonn,tI) pernwability of the premagnetized iron at
tbe flux density 13, 11./ ---, relative i1](:n'l1wnhd pemwability of the premagnetizcd iron
at the flux den~ity 13, P "'"" sl)('cific n·~i~hnc<:' of the primary and the secondary winding, 1./11 - number of tlmls for the primary winding, 1V8 = number of tutn, fot 1·.lH~ S(:~c()nd"ry winding, /-:l ~ ratio between the lotal copptr ~(,cti()fl of tlHj primary winding
and the total coppcr section of both windings, (2 = ratio between the total coppcr section of the f;ccondary
winding :tnd tll~ total copper section of both windings, (/, ~ width of thc core leg, Ii = width of the winding window, c = height of -the winding window, d -- thickness of thc core, (~ -- n.it-gap klli\th, ! i ,= space factor for j [,Oil cote, II; '--- space factor for copper winding (rat in betwecn 1.lH~ total
COPIH'f s"ctior( and the area of the winding window), 51, - specific wt·,ight. of iron, s. = specific weight of c()pp(~r, Pi "~price of iron per unit weighl, ·h =, price of copper winding pct' unit wcigltL
50

In order to $implify the c<~lculations it will be assumed in this section and in the remainder of this chapter that the magnetic flux is re~trictcd to the iron except at the air gap and th,ct, thcrefon:', the magnetic coupling between the primary and the :;econdary windings is peded- It is furthermore assumed that the iron core has a constant 5ectiol1 (in the case of the shell-type transformer the partial circuits must be equal), Finally, only such windings will be con~id8red in which the primary and the secondary wi.ndings have the same mean length of turn.
Fig. 3.1. Core-type tran~fQrrn.er with
on(~ coiL
Fig_ 3_2_ Core-type transformer with
two coih.
f'ig. 3.3. Sht:ll-type transforrrtct.
The figures 3_1, 3,2 and 3.3 illustrate schem<ltically core-typt' transformers with one and with two coib and a shell-type transformer respectively, all of thesto having rectangubr coils. From these figure~ it is evident Hlat the mean length of the magnetic circuit is given by
Ii = 2(ma + b + c). (3.1 )
The mean length of turn for the primary and the !5t;icondary windings follows frow the configuration of the deAivable horizontal crosssection:
10 = 2(a + nb + d) (3.2)
In these e(luations m and:li represent numerical constants pnsscssing values listed in bble 3.1 .
. " t.~·~~)~fonner type 1 __ ... m,,~
"<'re-lyre, ono-coil I ~ J ~/2 CQrc-typ~, two-(:oil 2 n/4 .hell-type I :rr.j2
Then the following expressions may be readily established for the premagnetiz;ing dircct current in the primary winding, the resistances of t.he primary and the secondary windings and for the
51

u)(Jricil~nts of self-inductance of these winding~;
1;.& I '" . __ ._.; .. {I'U[f"Wl
pW0 (f ~ 1,2). (-:i/~b~' ,
1 _._-- + (j' Ill!
(3.3)
(3.4)
(3.5)
(3.6)
denotcs an cffectiw, relative (normal) p(;rrll(~,.biJity of the prcmagnctizcd mag-n(ltic ciT(~uit at the flux density B <mIl
"'''=-1---_ .. __ . + 0' (3.7)
ji.f,
(h~sign<IJc" an cffcctiv(i. relative incremental permcahility of the prcmaRnM.ized l11agnetic circuit "t the flux density H with. in gcncral.
, rl rl "'" /j-"-, (3,8)
Ii
an (~ffe('.tivc, relative air-gap length. Furl h"r, we have the ,o;ubconJition
~:l + 1':2 = I.
which yi(:ld~, together with t.he relation
c1(,rivablc from (3.4) and (3.5) the following relation;
7j 1'1 = -'-"-'--'. (j = I. 2)
7'1 + 72 (3.9)
The ql1'l.nliti(·, <j, (j = 1.2) may tllerefore be. conRiciel'cci to he known. whicll means that for thl, proportioning of thc magnetic circuit it is suffici('nt to start from (3.3) ;tnd th,~ relations (3.4) and (3.5) both for j --, I.
52

Now a minimum value of the expression
(3_10)
ha~ to be found, which value rep,e~ents the materhl costs, the material weight or the mate:rj<~l volume of the stabilizing tran~former if fot Xi and Xc the corresponding values given in table 3_2 are taken.
~I'ito!=!ri()l'l _---'x'-'_----:---_---'x'--"' _____ _ I--_x __ 'r..~';:p •.
mtnimUlll mi.lkti~\I-w~ight
ITiiTlilll~llH L"J,I:J.tuial-vollin'<.e
3.212. Sohl hon
With a given Xi and a given ~ Xo expression (3.10) if; completely determined by the dimen,;ions of the magnetic circuit, so that in finding a minimum value of thi<; expression only equation (3.3) and the equations (3.4) and (3.5) both for j = 1 may be considered. By transferring herein the qu,.ntitics to be considen;d as known to the right-hand member and the remaining quantitie::; to the left-hand member we find
ld1 (3.11) --,--- = /{I.
(-{".,VI
wile (3_12) ----y;c = KR.
,u;l£Iiad (3.13) -----=KL
l, with
1«( = ('0/, (3_14)
/il/eRl (3.15) KR=
P
Ll (3.16) KL=--
!lOft
* 'fhc P;)t~I')~t~l' XI': eOmpri!;0S the ~pCl{!e f<lCLo~' Ir: which may be I.:om;ider't:'d 1() h~
known ~in(':€ the winding wjndow i5 to be filled c(Jmph.::t~ly (O~' obt,1.illil1g minimulII matc.:riul-c()~tsl I"l1ateriai-wcight t)r m~t0rh~l-v()hll".l1t:'!_
53

The llJJllJ.mUI1l of (3.10) is found by rn,~an~ of the theorem of LagraIlge 1ll1Iitiptier~, the relations (3.11), (3.12) and (3.13) serving as auxiliary c()ll(liti()n~. In accordance with this l.bt()n~lll the \~XprCS81()n
(3.17)
must ]"(-'ach a minimum. Tilt: J!mrfl(~f~bilities (t;" and (1.; occuring 111
this expn~ssion are defined by (3.6) ow] (3.7) and are, therefore, to be c()nsi<.h~red as being cleterrnint'(l by nand b'. Further, (3. t) .lll.rl (3.2) pwvick thl~ relationship beLw('("l"l l.! and Le n'~pectivdy on the OI\(: ha.Ild and thl~ dimensions a, 11, c and d on tlw other fumeL In (3,17) the qll:lI)titi(~~ X, y, ;$, WI, 13, b', a, 11, c ,wd d Jnay then be consiciered as illdep(':ll(lr~l"lt variables.
T() ttl(' minimum of (3.17) apply (:(·,rtain conditions which may be found by putting the partial diffel"entialiolb of (3.17) with r"cspcct t() th(~ aforesaid independent yaria.bh~s eq1lal to zero. In
orr:kr of succession they yi(,ld (3.11), (3.12) and (3,13) again and, makillg lIS,~ of these relations, the following ll(lW "qllations:
(3.18)
(3.19)
(3.20)
KRY 2n.K,,:Y /.KI/: I -_. - _._- -1- _ .. _ .. _- =,. 0 b lc 1/
(3.22)
21~1;\O gnv 2,,,):: 2Xi(U{ -)- xel) Ie - . -l' ·····1 ... _ .. -.- - 0
Ii C li (3,23)
2K RV ',.1, .. ;$.·.. _ .. _ ... 0 x,al< -)- 2Xcbc - ._ ..... _ .. ,- -1" d
(3.24)
Now 'I.n elimination process is carried (mL to ;.;olv/~ the above eqna.t.ions for the quantities which al'e of interest for Uw proportioning of (h(~ magnetic circuit, viz. a, b, C, d and Ir.
Elimination of x and z from the homogeneous linear equations (3,19) and (3.20) in x <ll"ld z, followed by substitution of (3.11),
54

furnishes
(3.25)
with
(3.26)
the partial derivativl' of I
J .= -- - (3.27) I'i I'n
with respect to B. The rclatiQmhip bdween 0' and n i~ (}btaincd from (3.6) by inserting in this tl'hltion expression (3.25):
(3.28)
TheIl substitution of (3.28) in relation (37), taking (3.27) into account, give!:l
(3.29)
Subsequently, dirninatloll of WI ~1.rHl /1;, from (3.11), (3.12) and (3.25) k7'I.d~ to
(3.30)
By inserting (3.14) and (3.15) in this relation, taking (3,9) into account, an expression is found which may be interpreted as a relationship between a and the r~ltios of b, c and d t.o a. If we introduce
i X, = _ ..
a (i = b, c and tI), (3,31)
this relationship can be cOllverted into the following expn:ssion for a:
(3.32)
where the p~rameter 71, which comprises only giVl,n quantities, is defined by
f!~f~ L112 1 = -- -_._ ........ -P (1'1 + '7'2)
(333)
55

Now dirnination of WI a.nd r< from (3.12), (3_1 J) ;llHI (3,29) provides
aiJed (3_34)
r n order to ObUllll from (3,30) and (3_34) a n~lation in which the dim(~llf;i()I1s of the magnetic circuit occur merdy ill the form of j Iwir ratios, first relatioll (3_30) is squarcc\. Multiplication of the corrcspOllding members of Uw (,(iuation thus found an(] (;<Illation (3.34), foUowu1 by s\lbstitution of (3-14), (3, IS) and (3.16) ~llld the llS(~ of (3.9) and (3_31), yi~'kb
28 (m --1- .1.D + .1.,,)5(1 1 n?o _I_ .1. .. ):1 ~ , - -- - P Xl-X----------- (J + Ll i1H)ilJih 8 "'= 0, (3,35)
"b c \i
wlwn: () (Iik(~ f) comprising (:lltin'ly known qW.1lltiti(;,) is determined by
FI~jj; (L j I2):l () -----------
p3 h -I-- 7~)~ (3_36)
Theil solution oJ the rcht_ion~ (3.22" (3_23) and (324) for I'IX, I~IIY
,md 1'1/ furnisllcs 2dc - 2db -- nbli
I(IX "" 2;oad!i _I_ 2x'/icl, --------------------------- (3.37) ctl! - bl" -- 2nb(;
d c -- bit + 2nbc I<[(y - ----- x,hctc ------------------ - - ,
et" -- hIe --- 2nbe
, 4Xcbcd1,,(c --- h) /(/A ~ X'i adl" T -------------------.
de - No - 2nbc
(3_38)
(3.39)
Aftcr' lliscrting (3.25), (3.28), (3_37) and (3,39) in (3.20) aml using P_31) we get
1 2nA~Ac( 1 ·1- n?/) _I_ ),<1) ----- - ----- ----------------------- -I-X },iI.{(1 + n.1.1! + 1,1,)(1c },b) - nAb?,,}
(3.40)
1 2"_ [_~ _I_ ~~3Al +fl.1.D+A~(,J.t~(.1.c--,h) ---~~/!.c~j-Hb-l-?',)} ] -0, dJJil X },a{( 1-1- n.1.v+.1.a) (.1.c- Ab) -n},I,},c} (m +AD -+ .1.r.)
where x = Xcix, (see table 3_2)_
SuhS('<Ill('ntly, ~ubstitlltion of (3_37), (3.38) and (3.39) in (3_18)
56

provides after some reductions
(mn -\- l)ab - ac + 2nb2 - nbc = 0,
in which only geometric dimensions occur and which, taking (3.31)
into account, can be convert~d into
Ab(2nAb + mn + I) ACo = . ... --------.
tlAb + I (3.41)
Simihdy, by substituting (3.37), (3.38) ,end (3.39) \11 (3.21) Wl'
Can deduce the equation
lc{mnaiJ + (a - d)(c - b)} = 0,
which abo (':omprises only geometric dimensions. Since Ie i= 0, th~ following expression may be derived from this relation making use of (3.31) and (3.41):
(mn + I)Ab + 2m I.a "'" ---,:---'-----
AO + m (3.42)
If now Ao and Ad respectively from (3.41) and (3.42) are considered to be substituted in (3,35) and (3.40), two equations in Ab and H a«~ obtained, ,,0 that these quantities are determined in principle. The ratios 1.0 and Ad then follow from (3.41) and (3.42) aft~r which the dimension a can be found from (3.32) and, be;).ring (3.31) in mind, the dimensions b, C and d too. Finally, b' can be determined from (3,28).
3,22. Core-type transformers with one and with two circular coils; shell-type transformer with circular coil
The symbols used in this section have the same meaning as those in section 3.21 except for a, which in thfl pn~,el1t CaSt' denotes the intt"rrtai diameter of the circular coil. From the configurations of the figures 3.1, 3.2 and 3.3, which may also reprc<;ent the tr(lIl,;formers concerned, we may write for the mean length of the rnagndic circuit
it ;;,j 2(ma + b + c) (3.43)
and for the mean length of turn for the primary and the secondary winding
Ie == na + 2nb. (3.44)
57

Now the expression
(3.45)
mllsl reach a lIlillirnllln. r{(~rewit.ll, we have as auxiliary conditio)');'; the, teb! ions (3. II) and (3.12) again and the relation
(3,46)
Ii
which now take!> the piau' of (3,13). It should hi, I't':Jiiz.ed that in thiil Ci\S(~ the iron space factor Ii wil! generally b(~ sm,llkr than in section ~l.21 ~incc the imp(~rfcct iron fillin!;:: of the; dI'ck form is also to be lakcll into acct)lIllL
Similarly, following the method applied in sccti.on 3,212 to filld th(' conditions for the minimum of (3.45), w(·' find
(3.28)
;\gain ;.llHI in C(JI't'csplJIldl:ncc with the re~ults obtain<:~d tli(:n, tIl(: following condition";
,1.oAc '1/
a "~:ii( In -:-I-~~-T-~c) 2{;-:~::-2ItA~) A';,l:l4 (3.47)
27(m ··1· .. All -f. Ac)ti(n -+- 2nil.!J)3 ..... -.--. ..---------. (J I· tlBn)J:)~8 ::-: 0
nA;~A;' (3.48)
(3.49)
+.~~_ [ .. ~_+ ~?~c(~ 1.:,z,,:,A/I!{n!c+ (2mn-n)Ab-4f1,1,.~(I~.±~~o±-.~c.)lJ = 0 'InB X n{(n+2n,1,I,)(Ac-Ao)-21!),(,Ar,}(m'I- Ab I'A,,)
58
A/i(8nAli + 6mn + n} Ae ~ ..... --------.--------.. -- .
4nA" + n (3.50)
i\.,; in section 3.212, A" from (3,50) may be considercd to be substituted in (3.48) and (3.49), from which twn cqwLLiollf; in Au and B are obtained, so that th~'~e (luantiti(;s are determined in principle. The ratio Ac then f()llow~ from (3.50) after which the dinwnsion a can l)(~ (ldt:rrnined from (3.47) and using (3,3 j) the dimcn"ions band c too. Finally, ij' can Iw {(Jun(l from (3.28).

3.23. N om(}b7am~ and graphs
Even with an acceptable simplification the peune,lbilities ILn and 11., are such functions of B, that it would be difficult, if not impossible, to derive explicit expressions for the quantities AI> and B from the e(l"uations concerned. A simple method for a numerical determination of these quantities is given here by using two nomogram,> a'; it appears fwm the following_ Substitution of (3.41) and (3.42) in (3.40) leads t\) a relation which can be put into the form
+ -gl(Av) + h(B) {+ -1- g2(Ah) } = 0
or into the equivalent form
= 0,
where g1(1.I» and g2(Al» represent certain functions of .40, while h(B) is a certain function of B. This me am that the nlsuit of the substitution may be repre';ent.ed in a nomogram with collinear 5Gale pointe; on scales for X' Ab and 13. To the result of the $llbstitution of (3.50) in (3.49) applies the same; however, in this case the functions ;1(AD) and g2(Ab) a,e naturally other ones_
The above"mentioned nomogram,; dept'md upon the properties of the iron to be employed. In thig thesis the nomograms and the graphs were plotted for the iron type 'U.S.S. transformer 72--26 gage', ~:tccllrate data thereof being known [R 32J. The reiation:;hip between f-l" and ,Ui (for f-ll was chosen a flux density variation of plus and minus 0.05 Wb 'm-2 ) On the one hand and the flux density B on the other hand is illustrated in fig. 3.4.
In order to obtain for thif> iron type satisfactorily readable nomograms, the above determinant was transformed into
o
1 + gl(Ab)!g2(Ab) 1 -"1"jg~T£~)"---
I +h(B)
x I+X
l!g2(Ab) = 0,
l/g~(AI»
o of which the terms of the second and the third columns represent the coordinates of the points on the :scales for X, Ab and B. They
59

ddmTnim: tIl(: nomogram after dlOosing the moduli and the angle between the coocdina.te axes. III th~ figun~,s 3.5, 3.6 ,Old 3.7 ,tn: shown six nomograms, one for each transformer type >1<. The scales £01' X and Ban: ,trai.ght and coincide with the coordinate axes enclosing an angle o[ 40° in th(~se figuT("S. T}lt\ ,c"ltls for X ;t]}(1 R could be chosen equal for the six nomograms and this is utilised to t:rnploy each time the S,U11e :>:- and J:I-sealc for two nomogmms.
IJOG!;'
;1,
I i
6000-- ....... --1. ---'*--t--t--f--f----1--+ 150a
!
tOOO lOaa
... _- ,00
o a 02 0,6 a,8 I,a I.~ II.
-B(Wb,m-'J Fig, JA. Hdativc (nonllal} pcnnC.ll.bility ~!.nd rci;·\.tivc in<.~rcT'[1i.:rlt;·I.l pcrlI"}(.'I·ll"lity (with II fill" density vHri,\tioll of 1'1110 ,lll,] millus O.OS ,Vh'IlI ")
r<>r th" iron I.YP" 'II.S.S. l.nl.lls[otmCl' 72·-26 gage'.
The result of the substitution of (3.41) and (3.42) m (3.35) may be brought: illto the :;!Jape
ICh) '1J(n) = 0
and may therefore be represented by a nomogram with thre,' parallel scales for 0, Ab and D. The same applies to the result of til()
,ub~titution of (3.50) in (3.48), The fjgur~:s :),$,3.9 awl 3.10 illllstrah' llomograms of thi.:> kind for the tr<~n,;[()rrncr tyP(:o; and HJ(: iron tyP(~ considen:d.
=t= j II t.ht~~i~ ;)1111 I.II~~ rllliowill~ fi~lll'i'~~ I.hi~ ~YllLhill:-; AlII it: ani! ArJ: al"(; provi(i(";d with
Hdditiollal :-i1,II'fj;-.:(:::; tll<~ addidounl :;.tlffix('~ dr, c2r Hlld ~r n'li~tl,; lfl [1, .. , (.f,lIT-lyP(~ tl'illl~
f"!"!r\f·r .... ;I.lld tlH~ ~hf~ll-iyp(, tran<..:.fonlH"1r rr.spc:divdy, all of thc:i() having rcc,tulll~ular
("oii:-;; wlldL~ !.l\i~ ,llldililllL,d ~\Iffi:\I::-' I~lc, 1:21~ ;111(1 ;-;I~ I·d;:..l~~ t(1 th<: :-:';Ul\<~ tn.m~fOl"Hll,.;r type,. 1' .. ~,-;pvcli\·I'lYI iltlt t!li:-; I.illll~ having l"in"lI];lI' f·oil-:.
60

Then the dimension a may also be found hom a 'Similar nOJ:nog,,~m as follows. The result of the substitution of (3.41) and (3.42) in (3.32) e<in be put into the form
a·G(B) = 'I)'P(Ab),
so that it may be represented by a nomogram with four paralld ~calcs and a pivot line. The same applies to the result of the substitution of (3.50) in (3.47). The figures 3.11, 3.12 and 3.13 ilIu:;trate nomograms of this kind for the tmnsformer types and the iron type mentioned before.
For practical use it is convenient to represent the relations (3.41), (3.42) and (3.50), which do not depend upon the iron typl~, in graphs as :;hown in fig, 3,14,
Finally, the curve in fig. 3.15 gives the relationship between b' and B determined by (3.28) for the chosen iron typc.
3.24, Dl;:sign proced~.re
In the following a procedure is given which may be used for the design, First, the value of X for the chosen criterion is Cideuhted from table 3.2 and the values of Tj and 0 with the aid of (3.33) and (3.36) respectively.
After having decided what transformer type is to he used, thl' point,; corresponding to the values of X and e on the x- and O-scales respectively in the nomograms concerned (figures 3.5-3.10) arc Ilsed as pivot points to rotate a first and a second straight line in such a manner, that in the two nomograms from the two A/>-scales the same value of Ab and from the two B-scales the "arne v .. lue of B can be ,ead.
At the value of A~ thus found, the dimension a is determined from the nomogram concerned in the figu,es 3,11,·-3.13, After t<~kiIlg th(~ associated values of Ao and, if it exists, of Aa from fig, 3.14, the other transfonTIe:'r dimensions b, c and. if it l,xiM8;, d are found.
Then the effective, relative air-gap length /)' is read from fig. 3.15 at the value. of B obtained before, after which the air-pI]> length 15 is calculated from (3.8).
Finally, the number of turns for the prjtrl<~'y and the 'Secondary winding may be found from r,:.Jation (3.4), while the wirE' section A 1
of the primary fJ.nd A2 of the secondary winding may be determined from
(3,51)
61

~fJ 05·· -03
06
OI.
0.7
0.8.
- 05
\.? ...
\()
f;'ip;. 3.5. NOJl.l.ograrns relating Xi A" a.nd n for th~ (1c:-;ig'!1 with t:\)"['(l.pk·t(~
frc·(·d,"" 1)1 cor~-typ() twnsformQrs with Clll(' T(''.'tangul". coil (additiollal H\lffix c:1r) and with (lnQ ciTc\llilT c,)il (addi1:iollal ""ffix cle).
62

0.,4
12 0.3
as
1.7 -0.4 0.6
0.7 0.5
10. -08
09 0.6
0..9 - 1.1
0.8
Fig. 3.8. NOInogram" rd,"ting 0, .:I~ an~l B i"r th" (le~igl) with <:;(Hnpk·tI.'
frecdom oJ core-type iransformers with one rectangular coil (additional .,uffix c1r) ':\11(\ with one circular coil (additional suffix clc),

06·.0.4
O?-
- -0.5
08--:
Fig. 3.6_ NOll1ogmm~ relatin;.( x. A" (tIIII l! lor the' ,h .. <;ig'L wilh complete fmu([om 0/ core·typo tml1~forrn("~ with tW() r"dfLngula.r ""ib (additional
suffix c2r) and with two "in~lIl(l.r c()ib ('l.dditional ""ifix c2c).
64

B (Wbom-2)
1.3--
O.L
1.2 0.5
0.7
0..5
11 G.8
-0.6 0.9
10 1.0
0.7
" 1.2
0.9- - 0.9
1.£
08
Fig. 3.9. Nomograms relating e, Ab (me.! n for the design with complete' II\:0dom of con~"type tran"fornwrs with two rcctanguIJ.l' coils (t,dclition;LI
~\lffix c?'Y) ",HI with two circular coils (addition,\l ",Iffi" 1:20).

Ab,sr Ab,s{
03 - 02
8 (Wb"/n-.?)
: -0,8
17i;;, 3, 7. Nom()grnm~ rclahng X. Ai) ~ITI(\ .n for thu dc'sign wlih comph)i() fr'-'l'('II.'m of shell-type t['an~I()rm"r" with n:d"-nglllar coil (additional sufrl" s'~)
and with circuhi.r coil (additi,ma.l ~llrfix -'c).
66

03
12
0.4'-
TO-0.3
1.T
0.5
a;. 0.6
ro
0.7 0.5
0.8
0.5 09 0.9
10-8
Fig. 3.10. Nomograms reluting 9, AQ und B for the design with complete frc,,'dom of Hhcll-typc tran,;fllrm",nl with r",ctanglllar c<>il (additional suffix sr)
alld with circular coil (additioll<ll suffix sc).

()'. CD (l 1
'll:.i ~'r~k IJ&
ta<o ,'·j/15 1m-J)
"I B
(Wbm-"1 ~ I=-Q5
~ t",S
+0111 f~ U.r
rDl/
fl.
ff.yJ-
~(jI--JI
0J)2 uy~
Fig, .:tl1. );:omograms rebting ~L i.b , R and a for th-e design ....... illi o::omplete freedDm of COTI'!-type tranSform"rs weth Dne rectangular coil (additional
,uflix ci1"j and weth 0"(' circular {:o!i (additional sum" cl (1-
t lJ
12
1.1
I./J
OJ
aI

CJ'. ~
Ao<u A"" "119
(\7
'Ii
(1:, u.
12
10-1-0.
(lJ-
OIi
Q_.
a {m!
IJ.]&
OM
-IIIS
()1f)
07
a05
(tQ.:
-G1J3
r, rv's'ln'~
IO J
/0'
w~
mot
J(r~
B rWbm"J
'1:/
v
If
III
a!l
Oil
Fig. 3.12. Nomograms relating '], /.0, B and a for the design w.th complete freedom of core-t}'pe translormers with two l"ectangular coils (additional
suifix co) and with two circu lar coils (additional sLlfiix c2c l,

'.J o
A." ) .. , (lIj
IT (mJ "
os
~
l!3
09
0.'1-
lUi
(lS-1-0.l
O~
O.J-!
~v?'i?m-~I
r~ "J J
02/l
10·'
IUS f
ow ro-~_-
'l
TaG7
18'-[ --j
t 0.05
J OW
OB3
F'g. 3.13. Xomograms relating 'I, i." B aJ,d a for the design with compi€te freedom of sbell-type transfOl"mcrs with rectangular cot! (addition;)] "uffi" 5r:,
and with circular coil (additional suffix sci·
8 !Wbm"l
rJ
-+12
til ~ +10
+(l:9
+il8"

Fig. 3.14. Relation b('tW("~Il tile optimum dimen5ioll rati()~ of tho iron core .
1001=-~"I="-"-=-t-"'-==-j-=---j-~=t===t==~=:::t-:::-::->----... -....
f-----+--+---+ -;- --f-0.9 I.Q
. ·_--t-_· --I- --
. ,------i-, _ .. - .
'1--"-'
1.2 1.3 1.4 ---8rWb·m-2)
Fig. 3.15. Optimum effective, relative ,\ir-g"-p length.
71

3.25 Remarl~s un uu gap and dzss1:paliun
With extrcmc.ly low values of tll(: para.rnder 0, ()' (:ouhl b,~ found to kwc.' it negative value. This occur~ with the iron type: IlS(:(! hen: if the value of the flux density is less than apPl'oxim:dcly 0.2 Wb· m "'2. N egativt' values of (~' are, of course, not realizable. It is evirltmt that in the said case the air-gap length is to be kept as small as possible. Tl[(~ fnr(:going rdations, for the derivation of which use is made of the partial derivalive with n~spl'~ct to 6' of l~xpn~ssi()n (3,17) or of the correspondin!";" expression in section 3.22, no IO))f{lT apply ill I.hi, caSl~. Fronl tfl(, (~(mditiol)s not relakd to tlli~ differential ion l'c.~ull. ~l favoltl'ahlc design Irlay be fOUl")(l in:t sirnpil' Il"talllll 1T"_
Finally, the following shot.lid be noted. Ie is p()s~ibk l.ha.1. a sl.a
l)ilizing transfornwr could be, found whieh would assume an exCCSSivl-ly high opcr;Jiiondl j:(·'IT11)(.'ratUrI:' owing to tIl(' pl\'magneti7,ing direct Ctll'tTIIl. III this case al:h)mpt may hn llla.lh~ to obtain a ~ilti~fact()ry rl~sult by starting' from [1 ioWl'/' t1i~,ipll.i.i()1l ill ddl'/',
ll1inin[.!; tile values for the tran"formcr panullctcr:; Itl sect.ioll 2.S.
3.3, J)1,,,I(~N WITII CONSTlUd!'-:T
3,31. Di'llwnsion ratios u/ the iron CUI'C: sf.lcc-ij1:d
Now thl~ ratios Iwtwecn thl.~ dimensions of tlll' jrnl1 cun.' of a tl':"cIlS[ot'I1h:r Iyp(' an: co[]siliI'n'd to fw giVl.'ll; ill total tJlI.'n.' an.' ~l~ually three of lhcm. In connection wilh the as:;umpLion llJal tht winding window is completely filled and with the manner in which the gcomctl'ic dim(:I1~i()n" ()CeuI' in th(', (~Xr)!'C'Sil)ll' for i.ll() pre':" rnagneti7,ing direct eurrent, the resistances and the coefficients of ,;cif-illlllll.'t<lncr:, it i", efficient to introduce the following three diIm:n,jollll:SS gt')()[nl~tric ratios which tllUS arc cOJ]sidered to be given in this section: J'w -- mtio of the mean lcn!";"th II.' of turn for the winding~ to the
nll~an length of the magnetic circuit ii, 1',/ ~.- ra.tio ()f tile Co['(, secl-.ioll (,0 l.7, I',,' - ratio of lhe win(lin!; win(llYw :1I'(;a il) if.
Analogously to (3,3), (3.4) and (3,5) the followill~ relatioll~ may 1)(: n:;l.liily obtained;
liB I = -,,-.-.-_.--llO/lnWl
(3,3)
(3.52)

(3.53)
To lij, (j ~ 1,2) relation (3,9) appliGs again, whi.ch a;; in trw foregoing mean,; that lot th~' ptoportioning of the magnetic circuit it i:; !Sufficient t.o ,t.a.rt ftom <''Iu,ition (3.3) and thc cquations (3.52) and (3.53) both for i,..,.., 1. For a minimum material-volume one of the transformer dimensioIls (here 1t is chosen) should attain n minimum. Since, owing to (3.6) and (3.7). I~;, and 1< arc again functions of 13 and 6', the length l.j in relation (3.3) and the relations (3.52) and (3,53) both for i = I may be regarded ao a function of the (luH.nt.itieO'; 1£!1, fj' a.nd B.
In order to facilitate the introduction of the condition for a. minimum value of {t, the (IUantities UI1 and d' will hl dirnill:d:c(l from these relations. First, we get after eliminating WI from (3,52) and (3.53) both for i = I:
vdlZ""" 1. (3,54)
where, taking (3,9) into account, 'f/ is defined by
/I. vi ill d c1'c 1 7/ = ----p11w T1 -I- 72 '
(3.S5)
which expres5ion GOlllprlSCi\ only known quantities. As appears from (3.6) and (3.7) taking (3,2'1) and (3.54) into account, we have
_1_. = 1J'lf - A. }l·n
Sub~titution of this expression in (3,3) followed by clirn1,nation of !ell from thi", ~\lb~t.itlltinn re~lIlt and rt;>l<lti(lll (3.52) f()r i = I ful'nishes, taking (3.9) into account,
It~f v IJf2 1;(1)'1; - Ll)2E2 = ~~ ---'--_. . (3,56)
pl'w 1" 1 -I- 1"2
Relation (3.56) provides a functional relationship between Ii and E, With a variation of B the length [.1 shows an extrem.e value (minimum), if
dll .... _-- = 0, dE
This is the casc. as a matter of fact, when the partial derivative of t.he left-hand member of (3,56) with r"speGt to th~ flux den"it.y i~ .'qual tn zerO:
(J -- {l,("n'F - 11)2 13~}' = a an" 'Il '
73

which relatioll, after some c()nver~ion, turnb illto
'r/l.f ~~ t.l -+- .Jill!. (3.57)
If (:3.57) is substituted in (3.54). rd[,tion (3.29) is again obtained, which togdhcr with (3,7) gives tlw relation
,tga;lL
I ()' = Ll Ji8 - -
lin (3.28)
Finally, ill order t.o a.ssess for what va.lul: of the flux (li.;nsity B tlte length li exbibits a minimum, li is eliminated from (3.56) and (3.57); the result thereof can b() written as follows:
(3.58)
wil.11 . I.aking into (l(c()unt (3.55)
, f.l~!U't!:'j'~ (Lll~)~ () "'- .-.. ;)j;;'r:.-.. (;l.+ T~r' (3.59)
Arkl df'(cfTnillillg 1h!' flux d('ll,il.y n from (3.58) ;llld (3.59), Ii ;llHl rJ' call be [oulld by mealls of (3.57) and (3.28) respectively. For till' same rcaSOll as mentioned in section 3.23 tbe numerical dc-1t'rrnin;ltion tak(,s pi<IC(' by nW,lns of graphs. \Vith "dcl'Cr'l('I; to (3.57), (3.28) all(l (3.58), Lhe values of r/t;, b' and ()' associated with ('xtrcme values of Ii mZ'ly be calculated for various va\u(:'s of H, aft('r which graphs can l)() drawn in which }/If an(l b' arc plotted on the ordinates ,tnc! 0'1 Oll the abscissa. These graphs are shown in fig. 3.16 for the iroll type mentioned in section 3.23.
TIIC following pr()((·~dlln~ for Olt ck:;ign may be followed. With the aid of (3.55) and (3.59), r/ ,tIld 0'> respectively Z'lrc calculated and then '1(1; and (r arc read from fig. 3.16. Subse(]llently, l., and (hw t.o (3.8) till:: air-gap length Ii ean be found by I, very sinlpk cn1cui:ttioll. Tile 11([1'1'11)('1' of t.urns WI for t.il(: primary allel lJ'i2 for the secondary winding :l.re: (kU'l'mined from (3.52). The wire section A1 of thc~
primary ;.llld 112 of the secondary winding may be calcuInt<::d from the following expr<:ssion which is similar to (3.5 I):
74
Tjlc1J,;lf AJ --"'----., (j = 1,2)
(T1 + T2)Wj (3.60)

'-I en
~:~o ! I I \ IIIIII I I I Illlll i: 14411 1:';0/0)
i 1 /
v
l---Y
I~' I I III ! III /1zt71l1l1l1 I /J$fl1M l'~O v ./
Imll j.j/ D' i I I ;, 1 :
~'~I ~'~I' I IIIIIII 1~'k"l~lt*13$I: I t I ;('
k?F -+---
v-, I I I 11II I I I i lllll(f' , n-3 I I . , I I l 10-
1 v lrr 10-3
70- _ (J'1l4 (V.s.m'1
Fig. 3.16. Graphs 1m the des'gn with spocified dimension ratios of the iron core (or with spcclfied punching of the laminations).

3.32. Pl!nching (if the traNsfof'/'/'kf la11tinatiu'lts specified
In til i" cas(' till' proportioning of the magnetic circuit is re"trictl'cl to tlw determination of the core thickness and the air-gap length, The c(we thickness wil.l be determined in an iterative way since this Jla~ til(' <l(.lvantagr; that each of the ,~tep~ of the ite,ation p,occ'ss com h(~ n:dll(:(':d to tfH: fon::going cas(, (di:;cu:;s(~d in :;ection 3.31), :$0 that L[SC mn.y b(: lfladc, directly of the r'(:~lllb found then:.
Name·ly, if :t certain v~llue is c~LirnMcd fot' the COfC thickness, not ollly t.i and 'lit, !JIlt also Pi and Vw arc known. Starting from tlw kliowll '1'"" PI alld 1'" tlte IlIet:llo(\ given hefore can provide the minimum valuc' of 1.,. If the latter is lower or higher than the given II, :t. ,malier or hr;';'(:J" core thickllcss n:spt:ctivcly hot, to be t:tkCli :l.lld
tlw said j)l-OC('s"; should be repeated. The ikration is continued until tll(: minimum value of ;. found equals practically the given I,. SubS(.:qtwntly', tlie proportioning of tfw optimum uir-gap length [mel tl)(! d(~sign of th(~ primary antI th~i ~(~condary winding i:-; qllit!: tJj(~
SHJIH: as in ,ection 3.31.
3.33. Irun core specified
rr tlll: giv(~n iron con: or ttl(: winding window th('ln~()f is sllrfici(~ntly LUf-(t:, Lhe proportiollillg of lh(' lllagll('lie circuil. is r'cslI'idc(l io the dl:knnin;lti()I\ of lllt: aiI'-gap kngth. In this case optimum dCHign "igni fil's tha t tile COJlpC'r q11a ntity has to hl" a rnininmm. A Iso in this cm,l' till' n:,nlh [OlIll(l in s(ld.iuII 3.31 may be used a:; will bc rc..:og
ni:wd <\:0 follow"~. Since, as it rule, the winding window now will not ill! cornpletdy filled, in fact only the data I, and 1'1 an: clin!ct.ly em ployahh:. An (:q un.lion compI'i:;ing Ll and 1/" Un) now be found, in which the single unknown is the flux density E. To this end (3.58) is raised to the power} and (3.57) to the power 3/2 after which the corresponding members of the equations obtained are multipJic:d with l~:leh oUH:r, TheIl, taking (3.55) and (3.59) into account, we obL'lin ~lf(ec k(JJ1h':. T'(.,;u·cangemcnls
!.l7/~1
('o(!.l -I ;'j~;Jjj-"
where. VI, (Lilt: iron volume) io given by
Vi '--'-' hpJ?
(3.61)
(3.62)
TIl(' flux dCllSil.y n is, ill pl'illcip1(), ddermincd by this fchlion :lnd Huhs<'.qucntly ()' UI n now be found from (3.28),
76

....., .....,
70 5 10 f
w,, ",((I,') ~ V U ,0
Ii ~ f 0'~ A~
t /~ r ' 70 4 I 1 1 1 1 1 1 1 11100
~ ~
k:;/f
~
lo'l~z~ I ! II11I11 IIIIIIIII'~' v47: I I I I I! II I I I IIII I I I IIII
~ I
102 1 I I I I II i I I i I ! I II I! I I 1111110-1
10 2 10 3 10 4 l 12 70 S
~ _1 (W-s-m-3) Vi
Fig. J.! 7_ Graphs ior the UeslgO with spC'clfieu iron eOfC'_

The n\lrnb(~r o[ turJlS 1£'1 is then determined by nchti()ll. which, lII<l.kil\g usc of (3.6) and (3,28), can be c()l)verted into
wIl LlHB2
l! jhO
(3.3)
(3.63)
Also in thiH case th.e numerical dd~nnination co.n be most easily carried out by mean'; Df gr'q)hs. OIl the basis of (3.28), (3.61) and (3.63) graphs can he drawn in which 6' and w)) /(.1 are plott~>(l on tit.; ordill;tkH and 1..112/ V, on tlw abscis,,1. <I., Khown in fig. 3.17 for the iron type ltIclltioll('<l befot('.
A procedure for tb(~ (\c,sign will !lOW be described briefly. Fir:;t. by means of the nlcUwd given in section 3.31 j)l which it is aKsmned tlnd the willding window is compktdy filkd, ~() tllat not oIlly 1'1 and 'II~ 1)11i aj"o /" anrl11,,, arc known, it will b(~ verifir:d whether the given inHl con: or the winding window i, S11ffici(;ntly Luge. If it turns out t.hlLl the minimum vahH~ of It {ollnd, exceeds the given tl, a con) having a larger section or/and n. larger window area ha~ to be 11Sl'ld.
HOWl'Vl'T, if the said valLlc is found to be low,~r, dw left-hand rrH~m h(~r of (3.61) is calculated and in fig. 3,17 tbl) associated values of 0' and WI 1 iIi arc read aft(~r which tIle. a.ir-gap lcngtl1 b fro 111 (3,8) and ,~JI an~ ·fo1lnd. Tlil: [lumber of Lurns 'W~ for till.' ~('c()nd;lry winding is c;llcllIaLl~(l [('Oil\
(364)
Now. the wire sections of ttVc' pdrm~Ty alld t.hc ~ecolldary winding c;\nnot be utlculatcd from (3.60) since the space factor /e is unknown; in thi, (: .. se they flrc directly found from th(, valuc-s of the winding n'o;ishlnc-cg Hj :
pWjl1wl , Aj - -.-- U - 1,2)
Rj (3.65)
In tliis n~bi:ion. t.he ratio 'IIW. which is not knowll at Lhe outset, i~ to be [oLlne! hy it(~rati()n starting from it c(::r/:a.in valUl~ of 'I'W c()rn~s
ponding, for inst~mc(~, to tlw enS('. in which the winding win(jow is completl.-1y fiIIL·£!

Chapter 4
CALCULATION EXAMPLES AND EXPERIMENTAL
RESULTS
4.1. INTRODUCTION
The theQry developed in the foregoing could be fl.pplil~d to two experimental arrangements. The basis thereof was anum bn- of electric machines manufactured by the N.V. ElectrotechIli,;(he Industrie voorheen WiUem Smit & Co. at Slikkcrvcer, Holland and which were available in a test room of this company. In succession the machines concerned were arranged to constitute a current regulating system and a voltage follow-up system.
In t.he arrangement of the current regulating system a stabilizing transformer was incll1ded_ Use has been made of the Bode diagram in determining the values for the traIlsfer-ftlIlction parameters of interest and the tnm~former parameters. An acceptable dynamic: effectiveness of the voltage follow-up syMem Wf\i> assured by a stabilizing RC circuit. The stability of this follow-up system was investigated by means of the Wyschnegradski diagram. The optimum adjustment in a region of stability on this diagram was found by applying the integral of squared error criterion_
Several tests have been carried out with both experimental arrangements. Moreover, both control systems were simulated with the aid of an electronic simulator; the oscillograms taken could 1k compared with the corresponding oscillograms obtained from the cxperimeI1ts with the electric machincs_
4_2_ CURRENT REGULATING SYSTEM
4.21. Open-loop freq#i$ncy-response junction
Fig. 4.1 illustrates the basic circuit diagram of the current regulating system. An amplidync A wergizes an exciter E which, in turn, energize:; f\ generator G of which th(~ f,rmahlre current
79

n~jlrcs()]iI.s i.IH: controlle(l variabh:. Tlw feedback v;(riili)h, is deriverl frCl[)l t.Ih~ VClILl1.';c ;!c["oss the intcrpoic and th(~ compensating winding of w;n(~I'a.Lol' G.
FOI' the ClllTent in the feedback circuit, by means of which the I1lcaourcd value of the controlled v;u'iu.bk is compared with th(:' reference input, thc:'k(:'dback v()ltage may be considered to bp a voJtag!.~ ,nun:!.: having ,Hl intcl'Ilal impedance Wllidl is llcg1ccted with n:sjlt:ct to the l:xtcrnal impedance, ,u tk(i: r.he latter is the JdCfIll illing qLlantity in tlw circuit concerned. For the anllaturc.~ C\lrrent of W:II(~rat()r G thio external il1lpcdanl.~(:' is Slljl)lOScr\ to bl~
illfillilcly higll with respcct to th(: paralkl-c(Hl!lccltd impedallc(~ (formed il\ fif{, 4.1 by 01(; n:si;c;lallce and the k'alqg(' induct;lllCC of ti](' ill tccP()\c. ;lnr! compensating winding of gCIlcr'ator (,"). <":on,,;('qm;nUy, the block diagram <.:c.n-r(:"pollding to fig, 4,1 may fw T·('
presentf.'d in fig, 4,2 in which usc is made of the )1lorn guwral block diitgram for thc, amplidync with the stabili%ing trn.n~f()rmer shown iIi fig. 2.5. It is noted that in the block diagram the disturbance signal corresponds to load variat.ions of gcnerator G,
Fi;;, ~,~;. mock Iliagl'am corro~p()l1liinf( to fig. 4.1.
Now, ;~ ch:sigrlai.ion follows of tho~e ::;Yln!)O]S: used in the figurc'$ 4.1 n.nd 4.2 which hav(~ not Ix'en nl<'nt.iollCd before, In addition, it sh()Il\(1 be nokd tJut the Laplace: tnlnsform of each till1c-dqwmlcnt
80

variable denoted by a small Latin letter i~ represented by the correspondirlg capital letter. H", = voltage across the stabilizing field winding of the ampli-
dyne, Ce, ~je ~ emf and terminal voltage of the exciter respectively, e(J, 11,9 = emf and terminal voltage of generator G respediveiy, ig = load current of generator G, K. = voltage amplific,l.tion ratio of e. to 82 under steady-state
conditions, ]( (J == voltage amplification ratio of 109 to el) under ,ten.dy-statc
conditions, Ri,c = resistance of the interpole and compensating wiIh"ling of
generator e, R! = external load resistance of gerterator e, R!, = total resistance of the load circuit of generator G, Lt,c = leakage inductance of the interpole and compengating
winding of generator G, T/J = time constant of the ex(;iter field circuit, Tg =- time constant of the field circuit of gcnf.rator G, Tr,C = Lt,e/Ri,c, T!' = time constant of the load circuit of generator (;,
The transfer function of the open loop in accordance with Uw block diagram shown in fig. 4.2 can be writ.t.en as
KI(l + s'7')(1 -I- ST;,,,)
"U+ST" + S273) (I +. s;~)(j' +"-S'-'7'(I-)(-I-I-" ST1,j with
Ri,c '-" Kl '= -- Kc,KjAeKg.
Rv The frequency-response functiQn corrc,ponding to till' above transfer fUTlction is as follow>;:
Ki(1 + iOJT)( I + jWTI,c) {(1-:':""--w-::-2'7''''~):-+-1:-'()-T",---:-}(I '+ jm.) (I +·-·i·(I)~~·-)-( 1-+-1"-'cj-)T-d
4.22. Defcnnination of the parameter value,
The known paramet.er;; have been based on the following values":
'7'~ ==; 0.31 s, Tg = 0.93 S, Tt," = 0.058 S, '7'/' = 0.021 sand f{j = 175. !\I For the calculation ~:wd IW..':ZI,lS-UrCn1c:nt of r'11~~!,.~h'nc p,;U-alllf:te':I'~ TljfcrCllCC; !~ n:t;"l(l(,
to the appropri.lt~ J~t~r;J,turc1 e.g_ [R33-381 ~ IH the calcul.1.ti<.)n -e,"'i.l.mplcs in thi:'l, ehaptcr
the t~mpt:.'.r"~~tl,.lT;"~-dcpendent p;').r;").mutc.~rs arc giv~n f()r ~m c:';p(ctl?:d h~Tr1peIaturc Cq11fll
to 40'C.
81

Tlw values of 7/' and ]{/ were caknlaled for th,' situation in which g(,lI(~J':ltor (, is short-circuited (no-load; this corresponds to maximUTll values fur TV and ]{/, so thd: there is a considerable charlcr of ill,;t.ability of the ... y ... tcm).
Since tl'll' largt~st time eonsbnt of the Jagging clements is 0.93 s, a pt'ovisional valL .. c for T is !'stimated having approximatdy ti1e "arne v,dw\ for cxampk, one second. Then, relatioTl (2.58) wit.h T~ "'.~ 0.265 fi, Tf'-= 0.015 sand 1'.1 = 0.59 s provides
0.284 < ~71 ,:~ 0.583.
Since a low valu(, of Tf; is dcsimbie, a first choice is fixed on 1'~ -
0.35 ,2. Thi~ corr('spOl](b to ~~ --'- 0.35 whieh v,dl.le is thus ncaI'
the lower limit. With this vaILle for T~ 1.11(, following sci. of valu(:s [or T and
'l'" has b(~(~n chosen for o!)bining an acceptabk~ VIl(tSC 11nd gail! margin: T - 0.6 sand TI!/ = !O s. The Bode cliagrar1'1 in accordanc(~ with tflP open-loop fn~qllc:ncy-respoml~ hmction for the paranwkr val\j(~s thus cho~en i" illustrated in fig. 4.3 (81:e t.lll: dotted lir\l's) in which the pha~l' m;.I,rgin J.nd thc.~ gain margin an~ 25 deg itnd 19 dB n~spcciivdy.
"! I .,
II' 10 ~ , to b
"& 9~ t
-/)0
I'"ig-. 4,,3. Bude diagnl.ln of l.hlj current T'q{t.lla.ting Sy;il:C!11 (dottl~d lil1e~:
7f; "- 0.35 ,"; full linc", T~ 0.21 ~2).
Starting from tbe ohtained value,s of T o.nd T,X tlHI correct vahl<.' of T~I and the v,dm:s of the resisbr\ccs and (;odIicicnts of sc>lfillductanccl of the ptimo.ry and :,;"condary windi.ng of thc tran"formcl'
82

are ddermim:d as follows. First, the further dab N., = 72 nand J( = 20 are introduced. Then we write
~r< = 16.67, fc = 0.442, f, = 0.025 and ~. = 0.983.
l{elation (2.43) yields ~1 = 15.20 which value exceed~ that ()f f., so that the Ilpper limit of C3 is given by (2.53). FroID relation (2.58) it follows, that
0.478 < ~~ < 1.486,
If T;, is chosen to be 0.240;2 which corresponds to $~ = 0.667, then from (2.44) we lind ~2 = 0.1886 after which from (2.49) it follows that t = 0.0124, so that relation (2,55) applies.
From th(~ curve in fig. 2.7 it can be read, that f)",,,,x "'" 0.95. According to (2.47) a maximum p~.rmif;,;ible value of R l , equal to 22.7 n is implied_ If ,1 dissipation of 100 W is alIowc;,d, then at an amplidyne output voltage equal to 40 V conesponding to the steadystate operational condition the premagnetizing current I equals 2.5 A and R 1, has a value of 16 Q which Hes below the maximum permit,sible value. In this case calculation of (2.47) yields fJo=.0.669. Solving the cubic equation (2.48) for ~1' we find that one of the roots satisfies (2,54), viz_ ;1' = 0.331 >1<. From this it follow~ that 1'1' = Q.199s, which together with Rl' == 16Q gives Ll = 3.18 H, From (2_13) with R" = 0.5 n we find Rl = 15_5 n. Subsequently, the parameters R2 and L2 are calculated with the aid of (2.45) ,!.TId (2.46): R2 = 61.6 n, L2 = 53.6 H.
With the rcvi,ed va.lue of 1'~ it was finally vcrifi!~d whether the d(·.;;ign criteria were still satisfied. The fllillines in fig. 4.3 illustrate the Bode diagram for thi~ ~aS8. From this it can be read that the phase margin and gain margin arc 28 dcg and 24 dB respedively, which was con,idered to be acceptable in this ca'Se,
4,23_ Iustification of approximate transfer junction
III order to verify whether the cubic term of the denominator polynomial in (2.29) may, in fact, be neglected, expression (2.32) for 1'~ is caJc:lllatl!d, and 5l1bseguently the validity of rdation (2.37) is checke(L At the cut-off frequency me = 5,83 S-l we find
which may indeed b!:l considered to satisfy (2.37). The admi:;:;ibility
Ijj Tbl~ value 1S ~lso Ohti1i11f:cl from the apprO:'iim~.ltc tidcrmilllJ.ti01'l t)f el' frill'n th..-: (ju,1.drati(: equatiun (2.61) ~wJ the linc:.'\\I' ~(I' .. L~~U()II (2.63).
83

()f 1I1e ap))[\)Xilllatioll is rmthl.'f j\l~(.iricd by til(' hd I"IIa1 by I.akillg into account the cubic term, the frequeIlcy characteristic curves in fig. 4.3 are not modified to a noticeable degree.
4.24. l)e.,ilin 0/ Ihe !:>tabilizi'nr; tmnsjormllr
Til<: rollowing (1:tta con.~titute the starting point in ttl(: tran~fornwr lksign:
HI ~c 15.5 n, 1\3 = 61.6 n,
j,o"2.5A; 1_ 1 ,-= 3.18 !-I L2 - 53.6 II
(Tl =. 0.205 s); h -- 0.870,;).
Mu/'cov(:r, 1.1[(' lllIlH:ltillg (If Ill(' transfo1'l'mT ImninLd.iOlh ie; pr('
~(.;ribed nH follows: shell-type (sec fig. 3,3), width of the core leg a .0' .. 0 114 m, width or the winding window b '-'" 0.067 )')'l <lnd /H:'ight ()f thl; wi1l(lillg window [.-'" 0.152 HI. The d(~sign hu.s l)(~l:n l'Ilil.(\t: by f()ll()wi I ig thl: pn),.-cd lin' dcscri [H'd in ~(,ction 3.32.
CalClilation ()f (3.1) give, I,: == 0.666 Ill. Them we: have 1',.- -0.0230. By itcr~lti(,)ll iL Wi.l~ founel tlhlt the wee thickness d was 0.085 m, COIlHcqucntly wc obtain /'1 = 0,0218 and in accordance with (3,2) we get l" ~ 0,608 m, so thatl'w = 0,913.
COlllputat.i()1\ of (3,55) and (3,59) yi'-"d~ with Ii "'" 0.9, 10,·,·,0.5 and Sllpposing tht; CXPl'clt:d LcmpeI'aLuI"c of the tr~lllsf()1'J)wr
windings to 1)(' 40"(:,
1/ C~ 1.49· 10-~ 111-2 <tlld 0'·, '". 1.53· 1 O-·~ V· s· m'-'~
n:spectivc1y. Wil:h Illes" v'l.lue, w,', find from the curve in fig. 3.16 .. a minimum value for l(, which is pm.cticlllly equal to the givcn mean length of the magnetic circuit. From fig, 3,16 it further f()U0W~ that b' = 0,46'/0 (in fig, 3.15 13 has the associated value of 1.1 1 Wb· m 2). to whicb corresponds, owing to (J.8), an air-gHp lengt.h () ('cjll[llling approxil'natE·jy 3.4· 10'--3 m.
Finally, we find hy 1Tl('~a.ns of (3.52)
Wl = 1140 and w~ = 4650,
Calcub1.ioll. of (3.60) yidds
AI'~ 0.853·1O-6m~ and A~ = 0,888·10-(;)n 2.
Th(: itssoci:.1 tcd wire diamdtr" Ii land d2 Wl:l'C founded off to the
ncart~t commercial ~i;;es;
>I< Th~~ (,'Oil I.e) bi~ ,~"'ploy~~d ill ,.lIi~ ('~:-";("'Ph~ h;(d p""qi(",;~lIy I.bc,~ :';;lll\i.~ 1lJ;·I~r)l.d,iI- JH'n)'!t:I't:ii~~
n'" tll().';\~ 011 \..,.-l!k,ll thl. irllll·t~·p~; dCPClldcllt llOlllogrillll:':' all~l grapll::=' in ('h~1pter J are t.lit~cd.
84

4.25. Experimental results
Fig. 4.4 shows the machinf's and apparatus employed; in particular, attention may be givf'n to thf' stabilizing means, viz. the stabilizing transformer T and the capacitors C used in the voltage follow-up system described in section 4.3 *.
Fig. 4.4. Picture showing the m achines and a ppa ratus employed.
During thE' experiment the following oscillograms were taken. Fig. 4.5 shows the transient response of the variables %c" e2, 'Ue, iy and ec, to a step-function input voltage eel with genera tor G shortcircuited. From this oscillogram it appears that the controlled variablf' ig passes the final value for the first time after 0.64 s, its peak value is 148% of the final value and the transient phenomena havf' died out practically after 3.1 s.
Fig. 4.6 corresponds to a case in which sta rting from given values of the load current iy and the external load resistance of generator Cr, the external load resistance was suddf'nly short-circuited . From this instant the controlled variable ig first increases rapidly to a high peak value since the effect of the feedback during these first
• The exciter E, which in this case is aligned to the generator G, is not visible in the fi gure .
85

inotants does nut yet assert itodf. A ftror 0_80 s it p.ho(;<; lhe ilCW
final value fo\" the fir;;t time and (LfteI' 1_8, lhe transient phenomena haw practically di~<lPPI'(ITCd_
Fig_ 4_5_ -rransi<::nt response to l\ :;tep-funeti~l1l input voltage with generator C short-circllitod.
It lh(~ stabilizing transformer was put out of operation, the control system with generator G short.-cirwited was unstable as could be expectcel and as ~tppcars from the Of;cillogram in fig. 4.7; the V,triOl15 variabje~ o;>(;illate with increasing amplitude.
illlIllllllllllllllllllilllilfllll'lllHlllllllillilllmllllllllllHllIlllllllll1I!laIIIllIIIllUIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIII :. ..... -------..... 1:; ..... --~
---.--" r~
Fif;".4_6_ (b;illogriITlI _,!lowing th" effcd o( short-cirClliting tl", "~t"nl".l
loacl ro::dst\t ..... ,x~ of ~cn<~r~\t()r G.
With th,~ aid of an eleclronic simulator of the Tedlllicld U nivl~rsity nl: Ei ndhovcn the transient rl'spom;e () f t Il!·~ con lrolled vnrinhk i~ in il.ccordilllCC with the various Case::; corresponding t() the flgUI'(;S 4_5, 4_6 and 4.7 is illustrated in tfH~ fig\lT'CS 4_8, 4_9 and 4.10 respectivc.ly. By comparison it turn~ (lilt that a good qualitative
86

agr~emerit exists between the corresponding oscillogram:;; particubdy, if it i:; realized that the influence of nOll-linear effects is completely neglected in the calculations, the resemblance is stronger than might be expected_
·IHlltIltlmllln!''''I''III'~t_I~I~.~~mnnlml'':l~!~~~~~II:I~111I1!I~1!!llnlll"'~IIf~I.'fllllnl"ttll'IIII'I!!lllllImlm"r"
I' '\ \ \
,
i /
Fig. 4.7. Sy~tem behaviO\lr with gen~mtor G short-cirCuited in the (:,l,se without ot'l.bilizing network; IlnstablG 8yst,<:mL
J;ig_ 4_8_ Oscillogram corresponding to fig. 4.5, obUined fro[11 electronic 6irnulator.
Fig. 1.9. O~cillogmm corn'sponding to fiK. 4.6, obtained frorn electronic ~imulat"r.
87

Fig. 4.10. Oscillogram cOI'r"~pondhlg- to fig. 4."1, obt::-l.incd fwm dc:c1:nmic ~irT1l1la.tor.
4.:l. Vm:u\C;J; FOLT.DW-CP SYSTEM
4.31. ()7!~ra{{ transjer jundicltl
The bw;ic circuit diagra.lrl of tbi8 voltage follow-lljl :;ystcm is illustrated in fig. 4.11. Thc amplidync A was a diff('~n~nt onc than the one cmpl()y(~d in the previo1!s ('}(pcrimcnt, sino: tl)(~ latter did not
'if~-:J~ lTl·*c T li~ ~+~,.·u;--···
/~-'"''--'''''
1<:-- J Fig. 1. i 1. Bn~i(: ,:irc.,"it dbgram of th,., voltage follow-up .~y.~t"m.
cOJlLlin " suitable: fi("ld winding for llw f(>(~dback variable wIdth in tllis CiViC is the controlled terminal voltage of generator (;. 1:Itaking IlSC of the same as"llmptions as thos,~ in section 4.2, the block diagram associated with fig. 4. i 1 is obtained as shown in fif.:. 4.12. By means of tit," theorem given in s(~ction 1.2 we find
Iii,.. 4.12. lliock diagram curr","],ol".lin>:: t() :flg. 4.11.
88

from which it follows that
U~ /(o(I +S7")
1:::", (I + 57'-; +·~2T~)(1 + STo) (1 -+- ST~·)(:-I ""'·I-~-~T-l':-) -'-+-i::C:{--:-I(l + 57")
whfr(!
and
i T R, R" ToT T..'" iT \.0 = -R:-- "At"< \"
l"
}"" Rl J' K K '-I = -R ]\.".,. t eKo·
!'
4.32. Wyschnegradsld diagram
The characteristic equa.tion, which can be obtained by eq\l<~ting the denominator polynomial of the overall transfer function t.o zero, may be written as
wit.h
:;
1: ai~i = 0 j·-O
ar '-= ilT",V" + at,i7' + aW,i·
The expressions for at"i, a,,! and aw,l arc collected in table 4.1.
1: I a'r~.t o 1
'7'(' + TO ! 't'l'
o K, o o o
1+ J{,
'T~ + 7(1 + 7T
'Ta~ I "Ii""!' -I- TOTi' + T~ Tr."TfJTI' + ''T~ + TCT ~- "Td"T~
\7"~'T't1' -t- T«TZ' + 7""'Td7"~ '7'1!'7'1,1'1',.".,.,5
The known values of the parameters were as follows: 7"6 = 0.505, 7'g = 0.93 S, T!' = 0.0016 sand ](1 = 20.
If, for the same reasons as in the case of the current regulating ~ysteill we estimate for T a provisional v;llue equal to one ~ec(J!ld, then relation (2.86) with 7"c'"'" 0.150 S, Tf = 0.042 sand Ta '"" 0.118 s yidd~
0.198 < g~ c( 0.316.
89

For a fir~t choice' T~ is given tlH~ value 0.25 s~ which corn:l~ponds to $~ = 0.25 *. Then, with the help of table 4.1 we calcuht.,~ t.he cocfficient~ ar".t, (h.i and aW,i; the numerical values thereof are listed in table 4.2. The formubc (1.17), in which u and 1) in t.his
i I "7" .• . --~. -'1
1
'" .... ·0
<. [.43
J 0.467 4 0.000744
5
I.~:-,.~_~L _____ ~~.if:' t o 21
20 1.4:\
o 0.717 () 0.J59 () 0.1 [7 () 0.000186
case rcpI'c~mt1. t.h(~ pucamctenl T" and T, turn into
U, U o C7. (0(1
V. ----= 0,
J.43 w2 + 0.000744 (,)4.
0.467 (02 );
V" ~ 200); We = 21 - 0.717 0)2 .f- 0.1 17w4, Wo ~ w(1.43 - 0.3590)2 -I 0.000186 «)~).
1 11 accordant(: with (I. 19), (1.20) and (1.21) w,' find
n."" ~ - 200)(21 - 0.717 m2 ·1 .. 0.117 w4),
Dr"'--- <0(1 - 0.467 «)2)(21.0.71'7 w 2 + 0.117 ( 4) -I + (03(1.43 0.000744 w~)(1.43 - 0.359 w 2 -I- 0.000186 w"),
J) - - 20 (j)~(J.43 - 0.000744 (j)Z).
After inserting the above expI'es~ions in (1.18) the following parametric equations ure found:
2\ - 0.7170)~ -I- 0.117(01 T .- ---.-.-..... .-.---~ - m2 ( 1.43-0.000744w~) ,
(21 - 0.717<,,2 -I- 0.117(4)(1 - 0.467(2) -I-
-I- (~)~.(L~3-0'0.2??~4w~) (1.43-=~~~.~~':)_~.±?:.??~186 ( 4)
- 20(02(1.43 - 0.000744(2)
As mentioned in the first chapLer (f>8(;tioT\ J .31), the singular lill(:s corrGsponding Lo m = 0 and (I) = DO are determined by the relations
ok 111 thi" I·;~~~.' it would not lH~ !'Ilitahl~ 1.(.,. dll')i'It\t~ ,~ value for T~ ll{~ar th~ lowf!t' limit ~ill~:I' jhi~ .nw(.'r li1l1it i:-; d("riw~d fl'()I\\ l'I:~L'd,Iorl (2.79) ~tlId. th(~rdon:\ givl~;.\ n low(.~~· vtdul.'
(I'H'I thllt following' It!)11I (2.l1l), COllf;iclcr a]c:.o tlw C()mp;'LI'i~OII I,H~t W~',(.'n ~tHbilj;dllg
tr;\Il:-;f<!l"IlIC!j' :~lIcl IU' I'.ir'!',\lit ill the s{'("'oI1(1 P;1l';)~I';1f.lh Df ,./,·r,'tIOll ).4-3.
90

ao = 0 and a5 = 0 respedively. Substitution of the expressions for ao and U5 corresponding to our example from table 4.2 shows th,Lt these singular lines are represented by the straight line ()f
the parameter plane at infiIlity_ Determinant D further equals zero for w2 = 1922 S-2; in this case, however, Dr. and Do do not vanish, whir;h means that this value of w2 does not correspond with a singular line_
A point by point construction of the curve determined by the above parametric equations yields after providing the hatching described in section 1.32 the appropriate Wy::;dmegradski diagram_ Fig. 4.13 shows the most important part thereof (see curve a). With the aid of Routh's stability criterion it was found that at the point 7'", = 1 S, l' = 0 the characteristic equation has three ~table roots after which the number of stable roots in the other region was found directly_ These numbers are indicated in the figum in circles. The required region is the region in which the number of stable roots is five since the characteristic equation is of the fifth degree.
4.33_ Dynamic effectiveness
The case t = I has been chosen since in this case the potentiometer could be omitted so that there was no dissipation at all. Moreover, a minimum value for 7~ could then be obtained. To 8 = 1 the left-hand ~ign of equality in relation (2.82) applies, so that (2.83) give,; the condition for the reaJi7.ability_ After substituting the values of the known quantities, among which K = 12, this condition turns into
1'" .,,; 137 + 0_192_
The straight line corresponding to the limit case and determined by the above equation, is drawn in fig. 4_13; below thi" boundary line no set of values of .,. and 7'" satisfies the conditions for the realizability.
For obtaining the optimum transient response to a step·function input signal, use was made of the integral of squared error criterion. In order to gain an insight into the behaviour of the magnitude of this criterion integral in the region of stability, a number of lint~~
of constant criterion integral value wa.~ sought in fig. 4.13_ To this end at each of a large number of points in the pan~meter plane the value for 7~ associated with the coordinates of the pOint concerned was calculated with the ,:tid of (2.73), after which the criterion integral was computed by means of (1.34) at the appropriate point.
91

A her interpolation til<' wught Jines could be sk(:tclH:!d Thi~ value" of the criterion integrall indicatl!d at the lines in fig. 4,13 apply to a final vahH~ of ~hJ equal to one volt. 1'1'0111 an examination it appcan'd tha t the u-itc'rion integral in 111(; pr(Iximity of the point T 'c.o 4 s, 7"" -]5, ,hows a minimum equalling 0,362 V2 ,s. This minimum is
very flat. A calculation of exptcssion (2,74) with N" ~ 10] U yic'lds fOf the point ,-"- 4 S, 7"[< -,----, 15 S (T~ ,"'- 0,881 s~): C---:::-8,93' 10- 0 F.
If a value of the criLcrion integral which exceeds the minirm.11ll slightly is acecpkd, a~ wiU appear hen:aftCT to be reasonable. this value can bi'! n!ali:ced with difkr(mt V<lh.l("~ of C. 1n order to find t1w n'lationship bclwc(!ll t.he criterion integral I and the minimum capacitance Cmin • with which a given vahle' of the criterion inh!gral can he n!:J.ii:-!(!d. we! first write the (!qllation of a line of constant capZlcitanc(! (,~apacitor line) in the par,ml(!h~r plane. This equatioll is founel by elimillating ~~ from (2.73) and (2.74) taking (2.43), (2.49) and /., 0= 1 into c01lsid'oration;
'IX = T I KRsC -+ 1'0 -+ ,t, whkh equation changes after substituting the valucs of the known (]t!<)ntiti~·s into
T~ =, -I- 1212C -I- 0.192_
The s~Lir11ni1lirnum citpacitancc Call H()W IH~ found by looking [()r the (:apacitor line whicb is tang<!nt to the curve III fig. 4.13 OIl which the criterioll illt<'gnd ha~ the given vaiLl(~. To this c.nd a tangent with ;l
~lopc eq LLal to unity is drawn to the Cutve. From thc~ point of intcrs(!dion of this tallgc~nt. with the ,,,-axis, thc valu() (.,r tht· capacitance emil' i~ calculated. By plotting a number of sets of v:tlU(·s of the iIltcgr:d T and of ern'in thns found in the form of image points in a coordin:l.'h! system of which J I,; the ordinate and C,(dn the abscis&.a, we find after int~rpolation the curve shown in fig, 4.14. From this it is evident th::d: this curve has a particularly fbt minimum, It is no u,;e aiming at the ;1h~()luh' minimum since a slightly highl'!T vahw of the crit.i'~Ti(ln integral involves an appn~ciable reduction in thc; v<tluc of the capacibnce. In the prcsenl case at fir,;t. a vf<lue exceeding the minimum by 10,%, w;,~ chosen, This value appeared t.il corrcop()[l(l with emin = 2.8.10-3 F. A v;d1H! t.hus found will. in general, be ['illl[lih,d off to the value of the cu.pllcitanc(, commercially available or in stock, which comes nearest to tl](~ OIl,; fOllnd. Hl'H' C tllrned out to be 3.3, ] 0-'8 F which corresponds to :l. mini Inurn vaillf' of th(' criterion integral ()qualling 0.385 V2. s, This is confirmed
92

, ..
a+1 =f-==-=----
a
Fig. 4.13. Wyschn0grad~ki diagram of the volt,I-W' follow-up sygt'''''1 (curvus a, u ami c ,q)T('~'mting the boundmy C1)rvc in the case of ,-~ h;tving the values 0.2582, 0.353." and 0.006382 n;'pcc;tivdy). In the ~t"hility "egion ~eveTal Jines 01 constant value of th" integr"l of sqmlred "Tror al'e shown, Lim: T" = 137 I" 0.192 in,]ic:"tcg the boundm'y lin" for tht' rea)i7."bility of the stabilizing RC Ci!CLlit: lin~ '0" ""- T + 4.19 represcnt~ th(: c',pacitor
linc with C = 3.3· 10-31".
lI~sJ __
1
Fig. 4.14. [{ehlion between thG v,Il'H> of the integral of oqlll,rml ",J'or ,1ll<! the minimum <:;apacitance.

by the ckkrminal.iOI\ of th(, rnininl\lTll of the u-iterion integral 011 the capacitor linc corrcsponding to C = 3.3· 10'-3 F (s()(-, th(.> lin(> Trx -'
T·I· 4.19 in fig. 4.13). It appeared that this minimum occurs ,d-. the point T - 1,6 S, T" = 5.79 s. At this point we haw: T~=O.353 s2
to which corresponds a Wyschncgradski diagram with the bouncbry CHrVl': indicated in fig. 4.13 by curve b. Finally, with the aid of (2.84) we find Rt! = 380 D..
With the above-mentioned value,; of thc pararndcl's lh(, lra.llsient resp()n~(: nf t.he: out.put signal U(f to a step-function input signal <1", wa.s found in an oscillogram shown in fig. 4.15 witlt lllc a ill of tile.
Fig-. 4.15. O~cillograTn illH!-itratlng th(:~ tran~iellt rORponso t.o a. stup-lunciion In}1nt voltagu, obLtLllu{l frOIll olm:trol'li(~ Sl'l'TIlllntor,
Fig, 4.16. ()~cillogl':\m ,heMillg th" hdllwiour of tile system wilhuul ,U,hili;-:.ing 1I~;t:WDTk Wi obtained ironl elL~clronic ~ilTlIllat:or: 111'l~ti\bk' t'oy~t.(:n1.
electronic sirnuLi.tor mentioned before. From th(~ ()scillognlrn it is evident that the final valll\~ of Ug is ,cached for the first time afler ahout. 0,75 s, that the peak val1H\ ()f Zig ,unotmts to 135% of the final v.d1!(~ ,\nd t.hut the transient phenornf.na. h,we pntctically died out aftcr' 3.5 -,;, This behaviour was cO!lsidcn~(l t.o be sati~factory in this exam pIc If this had not been the case, vllriO\ls rn(~'\:;l.m~,~ could, of
94

course, have been taken; for example, the value of the overall loop gain KI could have been modified.
Finally, fig. 4.16 shows the behaviour of the output signal as It
function of time, when the stabilizing RC circuit is not provided; the control system is then, as could be expected, umtable.
4,34. JI4,stification 0/ approximate transfer lundion
As in section 4.23 it was verified whether the cuhic term of the denominator polynomial irl (2,29) is, indeed, negligible. From (2.35) it is found that T; = 0.0117 S3, At the cut-off angular frequency, which is 3.09 S-l in this case, we have
W2T?, ~ = 0.0193, , '7'"
which value may be considered to satisfy (2.37). At the said value of ill the angle of lag egualling 97°33' due to the)
factor {(l -, WBT3) + jW"T,,}-l
differ, less than 10' from the angle of lag owing to the factor
{(I - 0)27;) + iW1",,(I- (lA-~·::-)rl Moreover, a calculation of the integral of squan~d error for the chosen point in the Wyr-;chnegradski diagram taking into account the cubic term yields practically the same value a~ in the case in which this term is neglected.
4.35. Experiml'nial results
In connection with the required rt'lllgnitude of the capacitance, electrolytic capacitors were used in the experiment. Two equal specimens of 6.6.10-3 F were connected in series with their negative electrodes together while a silicon rectifier was connected in paml1el with each capacitor a~ shown in the circuit diagram of fig. 4.11, Thus the capacitor system could stand voltages of different polarities and, if the potential of the interconnected electrodes was sufficiently high, it had a capacitance equal to half of that of each of the capacitors.
During the experiment scvcraloscillograms were taken. Fig. 4,17 shows an oscillogram of the tramient response of the variables uo,'
tz, U6 and U(J to a step-fundion input signal ee,' From the oscillogram
95

it: a.ppears that the output :signal U!I pas';,," the fiwd value for the first: t.im(:' after 0,90 s, tha.t its peak value is 1280;" of the' final value an(l t.hat t.he transient p)l('n.(lll1em~ have practically varlis)II·~d
after 3.2 s. From a comparison it. appear:; that the agrcemcnl bl'1 w('cn the corresponding oscillograms in the figures 4, 15 and 4.17 may lx' considercd a" to be ~atistactory.
Fig, ~,17, OscillCig"Ti'.TII co,.,."spondinp; io Ilg. 4. I.:;' oht:,lincd from dccirk lII:,chiJlory :lrranW'"l('nt (toad current of g"Il<:"OItor (; being t 100 A undur
~t:cil.dy··otato c()J](liiion,).
The o"cillogr'arn ill fig. 4,18 corresponds to the: case in which the sl.abilizing He circuIt. i, put O~lt of operation; it turns ()l1t that the syskrn is lH) louger st.lblc; how(·~v(~r, the various variables oscilbt(, with a consLtnt amplitude and so there is no (,ontirHlOllS increaOlc
Fig. 4.18. OsciIIogr;[lTl ("c.>r"e.~pollclillg to fig. 4.16 iI.' 0I>j:;[;I1(,,1 fr<'>IT1 (d(,ctric Hw,dli!!cry ~!,rn!,llg()n1cn.t: luarginal stc:t.h10 :-;ynt-t:IT1.
in amplit Util' :1, ill the corresponding oscdlograrn of fig. 4.16. W (~ can form ,\.n idea of the CllUt>C of this amplitude limitation by tllkillg the following in to (ll1~ideration. The transfer fUllction of the ampliclyne without stabilizing He circuit follows from th;)!. of t.he dlT)pJidyne
with the stabili/.ing He circuit if 'I" = 0, '1"" = 'tc -+ TJ = 0,192 oS
and 'I"~ ~~ 'rc'rf --, 0.0063,,2. In fig. 4.13 the curve c repJ"(~~("llts t.he boundary curve of t.he Wyschnegradski diagram corresponding to
96

the above-mentioned value: of T~. 1'rom this it appears that the point 7' = 0, 7'" = 0.192 s is located close to the: boundary of ~bbility. In this ca"e a slight modification in the system parameters owing to nonlinear effects easily may put th .. system in a situation in which rn,Hginal stability exists.
97

HEFEl-1.ENCES
1. ~lId (ninw II j kow, W. \OV" CqllldL\;':(~lI ~kl- s-(,dl~stCitil-:l,)11 1":"~io{~~~\ITlr:, ltd J; i\lll.~·C'llICillC
(;l'[! II! lLt~I'11 d~.'I· 'I'IH .. 'C)!"I(, lhleHr;~krt.:.'r :-:'1,.'lb!itt;ttil~e1: J{cl~dtlllg~:-;.y:-<t\~lIl(:. (\1111ll'IIl'II, 1 r:;.~9).
;'?, l r <I h 11, Vv'" ~~tahili UiblHl trr"'illcllllllW'11 ill dt'l" Il(,llf'n~n sowjHi"l:hl~11 '-I lc',";] l~II', N.f.f:d11'I·r'J:~rl.~l.:h1'Hk :~ (195b), 9, 229 2;-~t.
J, :'\111111 ;~I< 111';1, 'I', 'Ill... 1\1 i IIr.l , T.~ A new :-.tahillty m-ttt~riOI) of li)1('<~r ';,ervollicchalli~nls
Ily <ll.~r<\fk<ll 11Idllod. A.l.L.F .. [ra,-r18a.dirm." ,.~ (1957), Il, 40,,·48.
4. SC]1 11 I 1.;1" \Ai, C. i~, l~idl~Hut., V, C" 'the ~t~l(.~(;LlOlI ,1nd ll~e n( t.:.ervo perlormarw(~
n] kri;l. A ,I, l~·,!~·. rmnsa.d~mTS 7U (1957L II, 383-.188. 5, (~rnh;\'l\\, J)\lI\~t.,\.ll ~"1, I.,~l.b"nl\ R. C., Th •. ~ :O;Ylll.tll,~~i}, of 'OLI',i'n\~.,)\ Vi\II:-;lc.~llt
"(~~"POI''''(~: ('Ilikl'i:~ :(TlI,1 ;.;lHIHl~\I·d t(I'·lI1!-', 11,I,j~.h, i"ran;,:ac:rwlbs ,~ (1953), [1,273-288.
~, NIHI'':', PHlll T., SOllH' ck:iigll nitui:l for il.lltO!n:l.tic ((Jlltr(J1~. A.T.r,.!:'. Trlf.n.~
"diem" '0 (1951), 1,606 ·611. 7. Sart~~rjt!:"r\ Il.) f)il:'; ()lllilld~~l"url~:,:,pl·nl1ll:111 ill dl~T· 1{l:;..:clllll;.;~t(:dlJ1iJc H{:j!.du.ng,8-
hi'hl".ilc I (J".t,"i;~), 4, 74 7a,
8. II~' 1':-; (. JJ ~~I, I{" 1, i('lwr (ii\.' (;rc.\i",~'U <ie:-=. ql.lildnl.ti:-;chen Optillllllll:i. J\~:ifdtm¥MahniJi :j.
11%'1), 12. "~9 4D, ~J. H ~~I'~;I',Jlld, J~" l:dH'1:" drl v{'ralll~('11IiJillC\rtl':i qlladr:tti..;c'I1('''s OptilUllill. 1~'~f.I.'lM'~;:'~-
1,.,.1",-,:" ~ 119.56), 13, 190·· 195.
lC), 1'./' TI H, P., J),\~ Arbcitt~n mit All;Llugit~- 1\(!dl(!II;..:'I!I';iI.(~II. h'I'~dld7,g.~'lm:hnd~ " (l':l'!)iJ),
G, 20&-209.
11. ()liradllvi/', I" 1':\l:I~trl)1\1:-;~\h-i,;"": :\l1ah~ic-C<.:nLt )1,\11" ClIt(r:-'\lChUIIH V\)ll H.(~~('l-
Itrci~ell. N~:!!dli.J1.g$t(;l:IJjdk r1 (1956), 2, 36-40.
12. Ankr, j{., I\I',,~I"I', C, .:« Sll·iik! n'r D.t\~ l{eJ;(.'lHlod~'ll. S"t~m(.n~ Z.rit .. 'il.'lifl:jt l~J
(19(\'/), 10·· 11,512··516,
IJ. I~laml~a, N., r':lll ('I(:ktfllni:-\c.hC'l' !\foil~~l1l'(~g/"~U~rl,.~i~ fijI:" dk Syntllt':-:'I . .' \IIHI AIHl[Y:-:<.'.
\'U11 !it1!~~l~h ... ·IlT·~;illl;.:erl lI!H\ Kogdg()rilteIl. J)t.,~ch. Fld~t'fotccJmik 10 (1956), 5, 177- [82.
1'1. [{ <1-1(, A. M., it, H<lIrpC)(:V 0 ];1.1'11\1.'.11011>\11 IC1<lI!q"HtTI1'IJl(il'O lq)l-l'I'epIHl
lU'lI'CTlIil. [[pllrUliI)(lliUr M,I:['nMllTIlIC,) [1 M('~,'I""'CI1. U; (1952),2, 362·-J64. 1". 1,1("11·1", .I" V{\!'(~i\lrad1tl: Ikr·odmulig (kr qUiLdn\:.ti...:{"h('1l IV:gdW\('ht"c. Rl'j!I.'}Ul'bli:J
lr·,·/l'nr.h;'i (1957), 4, Il4 I ~,IJ,
I h. It" 1'11'111111, I{" Jkiti."lIi~ 1.\11. Jkn:<.'lulHllg ~kl· qII;td!",~ll~t:bt:11 Rq.((:HL!.\:!II:. RI..'~I.'h~H1.~'-
1""1,,·,,,:/, \; 11950), 4,14;,,-145. 1'7, A 11 II: t', ]\:., Eilli' lH'll(' Ikl"('chlltlllg:-'llll'!.hod~~ ~II,'" Ijllad.·a !.i ... dl('11 1::'1'~('1 fliidll'.
7,,,1.M.M. I; (1955), J27-JJI.
18, [('ilq, A, M, & I{"I,~:)I'(')<, A" H" () BI,I'IIIC,'lUllJ1H ()IlP(')""JllI'l'(~,;lCli
1'Y"III1I\II .. !·[mlt.l·lIf'[I"I,If1 eii<"'[.>lIHI{ I~ (1952).
19. <;uill(:mill, E. A.) CUilllllllniciJj.icl11 '11.~tw()l"h::-;, VIl!. II; 'fit!.: d(~:-;~icut trlcory of 1011':; lilli~~f fi~tpI"~ alld rcl<~ted Jletw()rl~:;\ (l\cw Yorl~, London; 1956).
2(), Bit'I"II:-<Ol1, (;(:or~c A., h:-.tilllatillp," t.l'an~i{:lll. I'(~~J!()IL~I!!,; fI'll 11 1 O.PC!II·lnop fl'(~qlll!IIC'y
j"(:~JI(III~(~, A,I.j~',I':, ~Cj".un,~a,(:tl:un,.s 7,'l (1955), Il r J!J!J. 40J,
98

21. niCrn~~)TI, G~~()1'ge A., It gcm)l:-at t(=c:hniqll~ for ~tppl;"C):.:illl;lLhlg- tr.'1.Il~icnt J:-c:::,pilllio;e It'om frequency n.~~J.I(lI~~~~ ;"",t'ii-ymptot<'.':::., A,J,H.E_ J'ratl-sacUc.ms 7:i (lQS6!, II, 253·-Z73.
22. Olrlt=!n.bnrgcr, H" '1"'I'~ql1~ncy-re~ponse data PI'0.:-if!lltatioll, ~t~wc..hr:-d':\ ;-uh'l dc~igll
erik,·i(t. A.S.M.H. ["",s",lion-, 711 (1954), 1155·1176. 23. Bode, 11. W., Kf!twork -l.\n~\{y~i~ ;,lMl fl~l-'r1h~H~k ~UllpJiUI.~I' d\~~ign. (Princ:duB New
.Jf!l'"":'cy, Torolltc), N'~w Y()l·1-.::, LOlldOlI i 1956). 24, UI'(IWll, G. S. & Cnmpb~ll, D_ P., PrineipJc..~~ (jf ~\~j'yomc:clH\ni~!ll:';; d::;u;'l!li(:~ aile]
~Yllthc'ih of c,:lo~(;'(l-loop {~ontrol ~y~t(nn~. (Nl.1w York i 1.C,)lI(1I)11 ~ 1958)_ ~5. JaIHf!S, H_ M., Nkhol;.;, N. B. & PhHl1p$, Roo S_, Thc()ry of t;o1,"vorll(j(:h:1ni:im~.
(Nuw Yc'II'k, Toronto, LOlldf)ll; 1947)_
26. Th-l.dt·r, C, ..roo &.. Brown, H., C., All;l.ly~i'!-r and dc-=i~a of fc,,·0(1kl.(:]{ (",()HtroI ::;y::i.tCIll~,
(K~w York i '[orclu!.!'), London; 1960). 27. POl't€rl A., Intn~\.hl~:ti(Hl to !o=.';:-r\·()mCChi\ld~III~. (London
1 J.\cw yf)rl~i 19.14).
:?re, $:.. y, M. G. l Rot::..ttinr; ;,.t!llplifif!r:=._ (LondoH , 195-1).
29. A dId I] ~1 B., Amplidync rt':~lIl;).li,~g' ~y5tcrl'l~. 1.EJ·, !(Jtt"1ud H1. (i947L ! J A ,49-60. 30_ SchdJilll:i', W., EI~l-;:tri-:.chc cHc.:c.lc,,'I' LIl"! Rf!gdkrcb;, Tcil.lf 1.,'\: [II. Regel-imgstu:/rn1'{{;~
(l955), 11.281-282 & 1 (1956), 2, 45·-19. ;H_ D(!~ker, 1\. 0., Alt~I':'ltion of thc dYll;,1.Illi( 1'I!o!~pOll;C of Iiw;':Tldil.: anlplific:r:-i by
f"e<llmok. A.I.t;.i.i. rr", .. ",aiolt,' 7:\ (1954), J, 658-66&. 32. C,\rll!Jgic-l)JjM)i~ Stl!!i!:l Corpon~tion~ U_S_S_ Elcc,hk,al SL(~\~l Sh~ct:-;. J~·ng·in,(.~~rh1>~
M""""I l]l II'\U~l)\Il'~h, 1949), 58. 33. TU:-<.tln, A-l Direct CW'r'01)t In:Lchinc::i. fur c.:c"mll'{11 s.yst~!m~. (L01H.tOtl, 19~2).
34_ Snlvciy, H, D. & Robin=-oH, P. n." M~;l'SurQlllollt aud c<dcnl:"Ltioll of d.c.·m~\c.:hi[\c;,~ arm~t"r. circ"it i",.h'ct~"o~. A .l./C.li. TransMtion, Ii!. (1950), ll. 1228-1237.
35. l'h~Il('I', Goo ]. &: Stein, W. A., TL'an~ .. 1fer :fu~l ... ,.tllj)~ ~11(1 p.1!':lm~t,z:r cvnl\.wti()11 fni'
d_c.-5crvomotol'~. A.I.E.E. Ir(J..t~:j,(.(.1?:o11~'~.1 (1955), 11) 4~O,·4t'l,
36. Saunders, H .. M" ]\fe;,"l~1l1'~m~Ilt of d.r.·.·r11~\chine pnranletcn., A.l,)!..E, "Tl'fl.'jo:.~'adioHS -.m (1951), r, 700-706.
37. J( ... ~~~1~~r'~ COO, U8ber die V(1r';'Y1.i:.ihe!:I7!c:lmul1g' optilUHl ~,b~(·~til))tHt€r Rcgell~T"ei~~~,
Tc:il I: D<t~ re;.relclynami'ii-chc Vt'rh~\Ht~ll (1t:'!1' CleichstrOrrlIlH\c",hine, Rar:slu,ngstcchn'U.~ ::!:
(1954). \2. 271-281. 38_ I-';:ocili l~, [·1. E., Trall~iel\t rC~p"~I\~~ clf cl.r::.-dyrum.L<'.H . • 1.1.,/~,H, 'i'rMt,8actions (i9
(1950), I, \J9-115.
99

:-;A1\1 EN V ATTINC
Bij ~cllHkclillg(,1l Vall (:lr:ktri:oche machines wt:1kc n:gclsyst(~nwl)
vormel1, komI hd vaak v()or clat de v(:Tmogensverstcrking plaa.b vindt in vcr~chci(km: verot.crkcrtrappt'.n. nt,. eerste verstcrkcrLrap of (lI- (:<,]"<,,;\<.' tW('r.' trappcn worden dikwijls w~rc:di,(~(~nl door cen rolc.rcll(l\: vcrst(~rkcr :\Onder terngkoppcIcffu:(.cn. W'\lIrH.'cr in /;o'n gcval hel. r(:w~lsy,;tecrn niet stabicl iR of h(~l ()v(:rgi.lng';V('r~chijnsel ong('w("'nsl slingcrt, is fwt vmlk van nut gcblckcIl om nwt behllip vall ccn stabili,;,tidrilnsform(ltor of cen cenvoudig stabilisatic-RCcirc\lit. van de uitg-J.ngsspanning van bov(~llgc,noemde regclmachincv(:r'ilcrb:r ('('T! mmk af te lcidcIl, die in serie staat en (:en tcgenk(lppding VOl'mt md de n:suIV:n,nck inganp-mmk V:ul de bctrokkl'1l rcgcllllachim'v('rst(.'rk('r; llicrbij w01'(H de werking van d(~ n~gclrna.chincversterker ill Maliollain' to(',;talld in principe ('chtcl' !lie!. bdllvl()('d. Til dit pr()d~chrift iJqx:rkcn wij ons tot n:w,Jmachinever~t\~l'kt"'I" vall IIct boV('nw.'llo('mde type en t(lt dt: vcnn\:ld(~ ~ta·
bili~aticnctwct'k('II.
HooJdstllk 1 gedl cllkdc bcgill,,~lell. van de tilcorie der lincain: Hw:lsystemen, welke ill dc j'l:k"lIvoorb('dden worden tocgcpa"t. EC1"st wordt cen thcorema algclcid Illd'. b(:lInlp waarvan de reslilt.cn:l)(j(, inv<'r,e ov('rclrachtsfullctic: vall t":(~ll n:w;lsysteem kan worden vcri<l'cgell 11it (\01"1 i.dgt~nleen blokschcma en we! celt z()(lanig scl\(~ma dat daarin de invlocd van het ingangs~jgnaal r,ich slechts langs ccn weg rcchbLI'ccb 1Ia.:lr tho uitgang voortpiant. Indk:n (:(:11 I)(:paa.ld F'g(']systl:('nl aJ~ gehed nid aan dcw ha.tst.(~ premi:;l;c volcloet of als de rCill.llll'I'l:ndc illv('r,p ()vl:'rdr~\chtsfunctie nie!. bdll)dt 1.1: w()nh~1l
IWPiWkl, k,m het thcol'crna w()["(ll:11 t()(~g('.past oj) .skchts cen dee! Villi lid rl'gdsystccm,
V(:1"v()lgcn~ worclt J.angc:gcvcn, I)()(~ d(~ shhilitt::it van cen rcgc1sysLc.r:rn rnd twee vrijc pal'amdCI'ii kan worden (lJ"H.lt'rzocht door middel va.n ltd. \iVysclmcgradski-diagram, waa.rin rk tW(~(i vnje pararnd(:~r:;
100

als ciiordinaten zijn uitgezd. In dit diagram worden eventuele stabiliteihgebieden gevonden. In een stabiliteitsgebied kie7en wij de vrije parameters zodanig, dat de. doelmatigheid van het rcgd",ysteem bevredigend is. Ter bep,tling V,(n de rehUd gunstigste instelling in een stabiliteibgehi(~d is een geschikt criterium vercist, In het bij:wnder wordt nader besproken het criterium van de geintegreetde kwadratische afwijking, dat wwel met bdmlp van eell clektronische simulator als v,m wishmdige hulprniddckn hantecrbaar is,
Tenslotte wordt het Bode-diagram in het kort beschreven. I-licI'bij kan een geschikt stel waarden V;lTI de vtije systeempal'amctel's worden gevonden door nuust een stabilitcitscriterium het een of ander ontwerperiteriurn op basis van de frequentie·reo;jlonsie tol~ te passIOn.
In hoofd':ituk 2 wr)r(lt de cornbinatic van de rcgelmachineverAerker en het stubilisatienctwcl'k behandeld als een eenheid, Eer"t leiden wij de overdrachtsfunctie af van dfl mgEllm;Hchincversterker alleen; daarbij wordt rekening gehouden md (it. magncii,;che koppeling tusscn de diverse regelveldwikkelingen. Uitgaande van het verkregen verband vindlen wij de overdrachtsfunctic van de regdmachineversterker met het stabilisaticnetwerk.
Vervolgcns wordt cen beschouwing gegeven Qv~r het rElalisceI'baarheidsgebied van het stabilisatienetwcl'k mede in vcrband met dEl ,~is vaIl een bepcrktc dissipatic, Wanneer wij rek~ning houden met de cis dat de netwerkp"rarneters, waarvan clk in cen bepaaJd verband staat met de ovcrdrachtsfuncticparameter», fysi>ch rea· lisccrbaar moetcn zijn, en tevem vedangen dat de dissipatie in het nctwerk in stationaire toestand beneden cen bcpaald toelaatbaar bedrag ligt, dan vinden wij grcnzen, waarbinnen de overdrachhfunctieparameters clienen tc worden gekozcn, Uit dezt~ beschollwiIlgen voor de stabilisatictl'ansformator volgt dat er voor de >tabilie;atieveldwikkcling van de regelmachinever::;terker zov."ld rnogclijk koper moct worden gebruikt, indien men wil !;treven naar cell 20
klein mogelijke di::;:;ipatie d<~n wel mar een zo klein mogelijke OlU
V~LIlg v;l.Il de stabilisatietransformator. in het gevaJ van het. :;tabilisahe-RC-circuit is ter verkrijging vall cen 20 klein mogelijke COll
dCIlsator en een zo gering mogelijke di~sipatie in de evcntuccl tc gebruiken potentiorneterweerstand, een 20 groot mogelijk aantal windingen vool' de stabilisatieveldwikkeling van de n:!g~,lrrlachine
versterker wenselijk, In tegenstelling met het geval V<ln de stabilisatietmnsformator is de draadsedie van de!,e wikkeling onderwor-
101

pen aan cen ondergrens; een grotere secti,~ dan d,',:w ()n(l(~rgn~ns is ondoclmatig: eo lwkhmt (;'~ll ()n(~C()[I(Hni;..(:h gcbruik V[Ul hct koperrn:d.t~riaal. Uil: vcrgclliJkendc bc~choLlwingcn bliJkt, dat cle stabilioalictransformator in vele opzichten te verkiezen i~ boven het stahilisatie-RC-circuit, Voorts blijkt, c1at ais een opJo~~ing met een nctwerk van (k (11H~ :o;oort. i~ W:~voll(h~ll, d:.laruit nid altijd voigt, dtll
('r ook (,t,rI opl()ssing nwgdiJk is in de vorm van cen netwerk van de andere soort, welke met dczelfck A.abilisati("vn\clwikkding r.\(-z(.Jftk j"(-gdt('chnisdl(' (·-igc·'nsc~hajlp(-n ve['~chafL Dit hoofdstuk wonll. beslolen mel een procedure tCl' be paling van de waarden der ovcrdrachtstullctieparametcrs en wei 7,odanig dat d(lZ(~ (lc·m Olanv,mnlb,Ir(1 c.lyllarnisch(~ d()(;]lTlatigfH~id VillI het regclsystecm opir:V(TCII (~n lC,vClh in oYeccenstcmming zijll met netwerkparameters die vc>ldoen aan de voorwaarckn vom de re,\Ji,;ctrbaarhcid C~1'l. d(~
ciissipatie.
Haofdstuk 3 handdt over hd ()lJ.tw(~rp v,ul ck stabilisatietransfarmata,-, Daad.lij ZlJI'l. de waard(~Tl van d(' wccr"tandcn en de coCfficimlh~n van )'.c:ifindlldic van de primaire en de sccundaire wikke.ling :dsmede de grootte vall de voormagm'hseringsgelij bt.room in (i(l
primaj,-e wikkc:ling w~w"vell. Wegens de voormagnctiseringsstroom i" hd ill het n.lgcrnecn wellsclijk het magnetisch circuit vall (~t:1l
luchtsplc:~d. md C~"1l z() gllllSt.ig moge1ij kc~ !engle te voorzicn. Twee gc,v;·dlen worden hier bcschouwd.
In hct ecrste geval is men geheel vrij in (k kel.lzc vn.n de verh<.l11dingt-n van h('t t.rnTlsform,dorijz(·r. Met bchLllp van de multipluc,d.on:nst:ciling va.n Lagrange vinden wij de voorwaardc:n VOOr
het bctcikcn van hct minimum van de kosten, het gewicht of lid volume van het transformatormateria~d. De~,e vC)orwf,anlen zijn voor de drie genoemclc' criteria kwalitatid W'lijk. Ah gcvolg ":lll de nid-lineairc eigenschappen van het tmllsformatOrllZer, zi]11 de optilllak Verh()\ldinw~n t\lSseTl de afmdingen van het transformalotijZCf afbankelijk van zekere gegevcns, welk<~ t.ot een parameter kUI1!len wonkn S~lm("ng~,vat.. Dtzle vcrhoudingell hangen bij het cl'itcl'ium van minimum mat(~riaalk()stell nih~raa.rd ook af vun de n.~hti"vc prijzcn pet volume-cenhcid van koperwikke1ing en transfonnatorblik; bi] het criterium van minimnm mat.l~ria.algewi(;h1. vun de relatieve soartel.ijkc:- gewichten, C(·~blckcn is dat ccn van deze optima Ie verhoudingen bep<lald kan worden uit twee nomogn\lnmen, waarna de andere onrnidddlijk '.li1. de eerstc volgen, Dc absolute groottc' van een <.I,-r afrndi ngr,Tl van hct transformatorijzer
102

wordt uit een soortgelijk nomogram bepaald, tenslotte worc1t de dimensionering van de primaire en de secundaire wikkeling gem'l.kkdijk verkregerl.
In het tweede geval wordt een neveneonditie gestcld in de vorm van het voorgeschreven zijn van aIle verhoudingen door afmetingen van hoot transformatorijzer, van de pons van het transforrnat.orblik of zelf<; van het trausform'ltorijzer ab geheeL AanrH:mende dat bij de eerste twcc nevencondities het wikkdvcnster gehecl gevulc1 is, vinden wij gemakkelijk de voorwaarden voor minimum muteriaalvolume door te eisen, dat cen geschikte variabclc geometrische grootheid van de transformator een minimum moet bereiken; daarna kan de stabilisatiehamformator op eenvoudige wijze met behulp van grufieken worden ontworpen.
Als slot is hoofdstuk 4 gewijd aan een tweetal rekenvoorbeelden ter illustratie van hoot voorafgegane en aan de experimenten die werden verricht om de uitkomst.en te verifieren. De voorhcelden ornvatten een c;onstante;:;troorn';Yf'.teern en E'en voIgspanning<;. systeern. In deze systemen werden de eerste twee vcrsterkcrtrappcn gerealiseerd door ecn amplidyne, welke cell opwekker bekraehtigde terwijl deze op Zijll beurt de bekrachtiging van een generat.or leverde. In de 5C!t<ikeling vall het com,tantestroornsysteem wcrd cell daartoe ontworpcn stabilisatictransformator opgenQmen. Een aanvaardbare dynami,che doelm'l.t.igheid van het voIgspanningssysteem werd verkregen door een stabilisatie-RCcircuit. Tu:;sen de experimentele re:sultaten en. die welke verkregen werden met behulp van een elektronische simulator hleek een be· vredigende overeenstemming te bestaan.
!O3

STELLlNGEN
gevoegd bij hd procfscl1rift getitclcl
CONTRIBUTION TO THE SYNTHESIS OF
~-fABILIZING rnAN5FORMERS AND JIG CllZCUITS
IN ELECTRIC MACHINERY ARRANGEMENTS
te vcrcledigen op 25 april 1961
cloor
TAN TIONG OEN

In N.E.N. 3009 wordt een automati!;che regelkring gedefinieerd als cen gesh)ten Melsd, waarin de gemeten waa,de van cen geregelde groothcid wordt wrgelekcn met de ingestelde waarde. Voortg wordt aldaar gesteld, dat 'afhankelijk van het verscbil van deze twee waarden wordt automati!;ch de gcrcgelde grootheid ZQ
danig beYnvloed dat dit versehil w()rdt vcrklcind'. Indien in deze formnlering de uitdrukking 'word!. verkleind' vervangen wordt door 'zo klein mogclijk wordt', wint de dcfinitie aan juistheid.
H.C.N.N., NoJt!"nc!atuur en defil1iti"., in II" techniek v(~n hd "\1tom"ti~ch n;gelen, grondbegrippcn. N.E.N. 3009 (1958), 7.
II
Ten onrechte veronderstellen Numakura en Miunl, dat de gclijk aan nul gestelde (n-l )-rijige Hurwit7.-determinant van een karakteristieke n·de graadsvergelijking, waarvan de coeffi~:ienten een lineaire functie zijn van twee rede parameter~, equivalent zou z.ijn met de in het p,irametcrvlak gelegen Jijnenfiguur van het betrokken Wy"c1megradski-diagram. De bepaling van het stabiliteitsgebied vindt als gevolg hieTvan in het desbetreffende artikcl niet op de cenvoudigste wijze plaats.
Numakura, T, & Miura, T., A D,'W stability Critel'ion of linear servo-mechanisms by a ;;:rafical m,:th<,>d. A .i.ii.E. Trans<,clions 76 (1957), 11, 4048.
III
In een artikd betreffende het Wyschnegradski-diagr;l.m geeft Hahn een verband aan tussen het teken van zekere uitdrukking en die zijde van €len grenslijn in het di<J.gram, waar de betrokken kamkteristiekc vcrgelijking meer wortds met een negatief reee! dee! bezit dan zij be;;:it aan de andere zijde. Dit verband is eehter slechts juist ai'S de dmairichting van het asse!lst€lbel passend is gekozen.
H 8 h 11, W., StabilitiitsunterslJchl1rtgcn in cler netleren sowjE'tisclH'n Lit"ratur. Reqelungstcchnii' 3 (1955), 9, 229-231. Dit prodschnft, paragraHJ 1.32.

TV
Dc door en, HI (: r gcmi\i\kte gcvolgtrckking, dat de ~labilii(~ib· gn'nc, van eeH lineail.' f(:gdsysl(~ern Z01.l worden aangcgcvcn door de gclijk aa.n nlll gcstelde (n-l)-rijige HUfwilz.c\d(·,nninant V~ln de ki\!.""<\ktcristiekc #-tk graadsvergelij king, moct op cell misvatting lwrl.lsten.
Crem er. I". Die Verrin!\"rlIng d(,T Zahl <.1('" StabilWits](rlterkn 1)('; Vo,·:\\'~~('tnI11g po,~i1.iver ]{odfi7.ic"t"n deT chil.TakteriHtisclwll Ch,ichullg. 7.II.M,M. 33 (1953), 7,221-221.
v
lid kwminlHt van het vcrschil tLl'S(~n ti(" geregelde grootheid van l,en r(;gl:by~l(:('rn en de bctrokken rcgclwaardc, gdllt(:grl:(~j"(l ()v~:r die' tijd Vim het begin va.n een ~pr()l1gfunctiesignaal ai t()t in het on
cindige. kan worden tocp:past: ,\1" (Titerium voor de c1ynamischc (l(wlnmtigheicl. Dczc criteriumintcgraal b.n ,dgdmlisch worden nitgcclrukt. V()lw~ns H ofm an 11. wu cleze uitdrukking nid gehlig zijn als de betrokkcn ka.raktl:·ri<;tieke v(:',geJijking mccrvoudigc worlds Il(:~dt. Dc cnigc bcpcrkcnrle v()()!'wa.ar(le is ("dd:~r, dat :l.ll,~
wortds de!' karaktpristiekc vergcliJking cen negatieJ reed dE(,1 mod.en he;:;ittel1,
I I (d rna n n, f<. r Krii.cricn fiir das Vorhandom~oin von J\1 ehri'achwlIrzeln odc.:~t' ein.ct llI1gC["julCll hzw. gtT'~l.<.l(~l'I Allnthl k(HJ.j1.lgkrt bHnplex(~l" \Vnrf.(;~lpaa1·i,.! ,l]g"(:br'ai~(~hcr Ch:ichll ngcn. f((~gdu,ng.'-iloehrl'iI, 4 (1959). 9, ~\ 1 0 312.
VI
Bij de «fleiding van de overdrachbfuncti(\ van (·)tirl anlp1idyn~
met cen claaman pamllelge8(~hake!de gtabili~atictransformator stclt A(lkin;.; a1>o uitgangspunt, dat de Illagnetb(~ring;;str()()fn in het van lx-lang :r.;ijn(i<: fr.:q\H"Tlt.iegehied klein moct zijn en zclfs bij bcnadering vcrwaar!o()scl mag word(',Il. Deze opvatting is niet voldocndc gc~taafd en kan met JlllnW hij iwlustrinf' t()epa;;~ing('n tot cen mindel"
jui"t on twerp lciclen,
i\ d kill', Il., Ampli<lyllc ,-egulating systems. l.B.B. Journal 94 (1947), 11!\, 49-60.

VII
Ret. praktische n1~t van de door Schilling gevonden overdrachtsfullctie van een stabilisatietransformator welke aan de secundaire z:ijde belast is met een zuivere weer",tand, is uitermatc twijfel<lchtig.
Sdlilling. W .• Ekktrische Glieck. im Rcgelkreis, T,.:il II & HI. Hafielu.nplechnik 3 (1955), 11,281-282 & 4 (i956), 2, 45-49.
VIII
Ten onreehte concluderen Thaler en Brown, dat bij magneti~che versterkers een kleine dissipatie in de stuurwikkeling hUl
worden bereikt door voor deze wikkeling vecl windingen van dun draad te gebruiken, zodat zij een kleine stroom voert; veelcer mc)d men een kleinere dissipatie in de stuurwikkeJing nastreven cloDr meer koper voor dez;e wikkeHng beschikbaar te stellen.
Thaler. G. J. & Brown, R. G .. A,1n)ysi,:; and design of feedback control syst",rno. (New Yorl[. Toronto, London; J960), 594.
IX
Dc dOQr Tus tin geplaatste opmerking, dat bij vergelijking van een <lmplidyne met de correspondereDde ca:;cadcschakeling \Ian twee conventioneie geliJkstrooD1gen~mtorcn, de coiHficient van zelfindudie; van het bekmchtigingscircuit van de tweedc trap van deze; ca~cadeschakeling niet groter behoeft te %ijn dan de ovtreenkornstige bij de amplidyne, is in het algemeen irrelevant. Van wezenlijk belang wordt de opme;rking, als men in de bovenstaande formlIlering 'de coefficient vaIl zelfindudie' verv<lngt door 'de tijdCOIlstante' .
'"rustin, A .. Din'ct, current machines £(I. ~')I1trol systems. (Lmldol1, 1952). 203-205.
x De opvatting van Adkins, dat 66n van de; kenmcrkcn V,m (h~
amplidyne een grote spanningsversterkingsfactor is, en %ijn overweging, dat bij het antwerp van de amplidyne een \Ierkleining V,lT!
cen der tjjdconstanten in het algemeen teg~lijkertijd een verlaging van de :,;panningsversterkiDgshctor met zich meebrengt, gctuigen van een onjuist im;icht in de essentiele betek~nis van het begrip spanningsversterkingt';factor.
Say, M. G., Rotating amplifiers. (London, 1954), 11 & 25.

Xl
Be (1<: r k e vermclclt dat (k v(~n'J.digingseffcctcn van f,("Il gelij kstroomgencrator, waarv"n de klcme;pallning over een proportiOIl(;ei werkend. lid wordt teg(,ngd{()ppcJd, op het ovcrige van het regclsysteem g(~.'!l invloed zouden hl,bbl,TL Bij ovel-g,mgsversehiJllsden is l,f,n dergelijke in v/oc(l ec:hter stellig aanwezig.
1>., de r l{f'., E. J., Drd"ahl r;crc;:(Qllc Lt:(>nnnhllt.ri"J,c il"TO~zcr (;""I,lIigk(,it, e.I.t.M. 76 (1959), 73, 557 563,
Xl{
Bij het ontwerpen van een geli.ik~tr()()mgenerator met # onafhankelijk van dkaar lwknJ.chti.gbare parcn naburige polen en rt in Iioofdzaak van clkaar onafh;u1kelijke gelijke bebstingsdn:llih dient 11J(,ll ill het algcmecn tc rdl.l:nen met een dimensicc()n~Ll.nk. welke
to hd·· -voud bcdraagt van (1(, dirnen~ieconstantc in hct W:val (Ie
21t-l . g'(;[J(;r;J.t.or YO or slechb MIl belasting~circuit wordt uitgev(H~rll.
Morath. E., lI![c:hd,.Lchgclh:r"t(Jnm "fiir (doichs1.1'om. A.S.E.1. 7eitschrilt 3 (1958). 3, 86·-91
XIII
Bij het gebruik van magntltisering.~krollllllen vuor huge inducties bi] dt: lwn~kening van clektrische machines bl.n het nudig zijn rekcning te hOl.ld(~n met de invlocd van de tcmpcratuurwerhoging in bedrijfstocstanrl np (h" van de absolute temperatuur afhankelijh ver7,adigingswaardf. d(~r rnagnetische poiarisatie van het hdrokhn dyn".Tnoplaatmatcriaal.
XIV
Het voor hOgiC induclies bi] wijze van bcnadering vervangen van de rnagneti~eringskromme van dynamoplaat door de raaklijn in dat punt van de kromDle waar de waarde van de magndlr;che lnd\lctie ongcvcer gclijk b <-La.n de verzadigingswaarde clci' magnctische pohri~atie van het bctrokken rnat.eri<\al, kan bij de dimensionering van ekktrischc machines tot cell onbruikbaar ontwerp leiden.

xv
Dc rcgd van Simpson, welke bij de bcrekening van het magnetisch spanningsverIies over de tandhoogtc bij dektrische machines kan worden toegepast, geldt niet slechts exact voor een parabolisch verioop van de rnagnetische veldsterkte lang,; de tandhoogte, doch evenzeer voor een verloop volgens een derdegraadskromme.
XVI
Ret gehed onderdrukken van ecn del' zijbanden bij een omroepzender voor A. M.-ontvangers leidt wcliswaar tot het gebruik van een smallcre frequentieband, doch hier staat tegenover, elM de dnl,aggolfenergie in verhouding tot de zijbandcncrgie dient te worden verhoogd ter voorkoming van ontoelaatbare vervorming. Er kan echter met een geringere verhoging worden vo)staan indien men bij de zender hct h.f.-uitgangssignaal over een detector negatief terugkoppelt naar de l.f.-ingang, aangenomen dat de detector in de ontvanger;; de;;;elfde karakteri!,>tiek bezit als de eerstgenoemde detector.
xvn
Bet is wensclijk dat uitgewerkte algemene aanbevelingen worden gegeven voor het afbreken van formules, welke niet in hun gehecI op een ,egel kunnen worden geplaatst.
XVIII
Ret verdient aanbeveling in wetenschappelijke verhandelingen een principieel onderscheid te maken tussen het voor de operator dfdt gereserveerde !>ymbool en bet symbool voor de complex variabe!e bij de LapIace-tmn!>formatie_
XIX
Voor gevaIIcn waarin de rugtitel van een hoek geplaatst wordt in de lengterichtiI\g van de rug en met de letters of karakters haaks op die lengterichting, dient een internationaal normvoorschrift te bepa!en of de voet van de letters of b.mkters geri,:ht moet zijn nil,ar de voor- dan wei de achtcrzijde van het boek.