Embed Size (px)
Citation preview

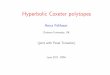
Contractions of Polygons in Abstract Polytopes
by Ilya Scheidwasser
B.S. in Computer Science, University of Massachusetts Amherst
M.S. in Mathematics, Northeastern University
A dissertation submitted to
The Faculty of
the College of Science of
Northeastern University
in partial fulfillment of the requirements
for the degree of Doctor of Philosophy
March 31, 2015
Dissertation directed by
Egon Schulte
Professor of Mathematics

Acknowledgements
First, I would like to thank my advisor, Professor Egon Schulte. From the first class I took
with him in the first semester of my Masters program, Professor Schulte was an engaging,
clear, and kind lecturer, deepening my appreciation for mathematics and always more than
happy to provide feedback and answer extra questions about the material. Every class
with him was a sincere pleasure, and his classes helped lead me to the study of abstract
polytopes. As my advisor, Professor Schulte provided me with invaluable assistance in the
creation of this thesis, as well as career advice. For all the time and effort Professor Schulte
has put in to my endeavors, I am greatly appreciative.
I would also like to thank my dissertation committee for taking time out of their sched-
ules to provide me with feedback on this thesis.
In addition, I would like to thank the various instructors I’ve had at Northeastern over
the years for nurturing my knowledge of and interest in mathematics. I would like to
thank my peers and classmates at Northeastern for their company and their assistance with
my studies, and the math department’s Teaching Committee for the privilege of lecturing
classes these past several years.
Finally, I would like to thank my girlfriend Rachel for her support and company during
my work on this dissertation. Her presence in my life has been a priceless grounding force.
She helps keep me happy and sane.
ii

Abstract of Dissertation
There are several well-known constructions of new polytopes from old, such as the pyra-
mid and prism constructions. This thesis defines two new local constructions on abstract
polytopes. The first construction, called digonal contraction, allows digonal sections to be
removed by merging their two edges into a single edge. The second construction, called
polygonal contraction, allows polygonal sections with at least four vertices to be converted
to two smaller polygons by merging two non-adjacent vertices. Neither of these contractions
can be applied arbitrarily; we present necessary and sufficient conditions for the use of each
contraction. In the case of polygonal contraction, we find that the graph-theoretical proper-
ties of the polytope affect whether the contraction can be applied. Both of these contractions
have interesting interactions with another new construction, the k-bubble construction in-
troduced by Helfand (2013, Section 2.2), which are described. We also investigate how
polygonal contraction can be performed somewhat globally, and what the effects are on the
automorphism group of the polytope.
iii

Table of Contents
Acknowledgements ii
Abstract of Dissertation iii
Table of Contents iv
List of Figures vii
1 Introduction 1
2 Basic Notions 4
2.1 Basics of Convex Polytopes . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Posets and Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Abstract Polytopes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Graph Theory and Polytopes . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Digonal Contraction 21
3.1 Preliminary Results for Digonal Contraction . . . . . . . . . . . . . . . . . . 21
3.2 The Digonal Contraction Theorem . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Reversing Digonal Contraction . . . . . . . . . . . . . . . . . . . . . . . . . 34
4 The Helfand Construction 38
4.1 The Global and Local Helfand Constructions . . . . . . . . . . . . . . . . . 38
4.2 Connections to Digonal Contraction . . . . . . . . . . . . . . . . . . . . . . 43
5 Polygonal Contraction 51
5.1 Defining Polygonal Contraction . . . . . . . . . . . . . . . . . . . . . . . . . 51
iv

5.2 The Polygonal Contraction Theorem . . . . . . . . . . . . . . . . . . . . . . 57
5.3 Polygonal Contraction for Polytope Lattices . . . . . . . . . . . . . . . . . . 75
5.4 Connections to the Helfand Construction . . . . . . . . . . . . . . . . . . . 76
6 Polygonal Contraction and Symmetry 84
6.1 Multiple Polygonal Contraction . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.2 Connections to Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Bibliography 104
v

List of Figures
2.1 A flag of a 3-cube. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 The Hasse diagram of a square. . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 The pyramid and prism over a pentagon. . . . . . . . . . . . . . . . . . . . 10
2.4 The distinguished generators of a square. . . . . . . . . . . . . . . . . . . . 10
2.5 A triangular 2-section of a cube. . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Examples of abstract polytopes which are not convex polytopes. . . . . . . 15
3.1 Digonal contraction on a cube-like polytope. . . . . . . . . . . . . . . . . . . 24
3.2 Four non-contractible digons. . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 An example of Condition (4) breaking for digonal contraction. . . . . . . . . 33
3.4 Merging two polygons with digonal contraction. . . . . . . . . . . . . . . . . 35
4.1 Two different applications of the global Helfand construction to the 3-cube. 40
4.2 Producing a digon via the Helfand construction. . . . . . . . . . . . . . . . 44
4.3 Producing and contracting digons with the Helfand construction. . . . . . . 45
4.4 Merging two triangles into a square with digonal contraction. . . . . . . . . 48
4.5 Merging two polygons with digonal contraction, in connection with the Helfand
construction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.1 Polygonal contraction on a hexagon. . . . . . . . . . . . . . . . . . . . . . . 52
5.2 A polytope nontrivially satisfying the conditions in Prop. 5.1.2. . . . . . . . 55
5.3 Edge graphs satisfying and violating the conditions in Prop. 5.1.2. . . . . . 56
5.4 Polygonal contraction failing due to apeirogons. . . . . . . . . . . . . . . . . 67
5.5 Examples of connectivity and non-connectivity in polygonal contraction. . . 68
5.6 Two similar polygons with different results under polygonal contraction. . . 70
vi

5.7 Five different examples of non-contractible polygonal sections F/G in poly-
topes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.8 The edge graphs G for the examples in Figure 5.7. . . . . . . . . . . . . . . 72
5.9 Breaking or preserving the lattice condition via polygonal contraction. . . . 77
5.10 Producing and contracting polygons with the Helfand construction. . . . . . 80
5.11 The creation of a triangle via the Helfand construction. . . . . . . . . . . . 82
5.12 The creation of another triangle via the Helfand construction. . . . . . . . . 82
6.1 The truncated square tiling. . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.2 The polyhedron P1 obtained by contracting all octagons in the truncated
square tiling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.3 The polyhedron P2 obtained by contracting all squares in the truncated
square tiling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.4 The polyhedron P12 obtained by contracting all squares and octagons all in
the truncated square tiling. . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.5 Further contraction of the truncated square tiling. . . . . . . . . . . . . . . 96
6.6 The first step in a maximal contraction of the truncated square tiling. . . . 97
6.7 The second step in a maximal contraction of the truncated square tiling. . . 98
6.8 The third step in a maximal contraction of the truncated square tiling. . . . 99
6.9 The final step in a maximal contraction of the truncated square tiling. . . . 100
vii

Chapter 1
Introduction
An abstract polytope is a combinatorial object generalizing the face lattice of a convex
polytope (McMullen and Schulte, 2002, Section 2A). Specifically, an abstract polytope is
a poset. The elements of the set represent faces of the polytope and one face being less
than another in the poset represents two faces being incident, such as a vertex contained in
an edge. In order for a poset to be an abstract polytope, it must satisfy four conditions -
some are very straightforward, such as the requirement that there is exactly one least face
and one greatest face, while others are more complicated, such as the strong connectivity
condition. As such, testing whether an arbitrary poset is an abstract polytope is not simple.
A construction on abstract polytopes is a way to perturb an abstract polytope, whether
locally or globally, in order to get another abstract polytope. Two well-known constructions
are the pyramid construction and the prism construction: just as we can take the pyramid
over a convex polytope or the prism over a convex polytope to get a new convex polytope
of one higher dimension (Grunbaum, 2003, Sections 4.2, 4.4), we can generalize these con-
structions to apply to abstract polytopes, and performing either of these constructions on
an abstract polytope always produces an abstract polytope of one higher rank (dimension).
Helfand introduced a new global construction on abstract polytopes called the k-bubble
construction (Helfand, 2013), or in this paper, the global Helfand construction (we define
a local version later). This construction is a generalization of the operation of truncating a
convex polytope. For example, if we truncate a cube, we imagine slicing the cube near each
of its vertices, so that there is now a new triangle for every vertex; the resulting convex
polytope is the well-known truncated cube. This new polytope is not regular like the original
polytope was, but is still highly symmetric. The global Helfand construction allows us to
1

apply a similar operation, in various ways, to an abstract polytope, and always produces a
new abstract polytope of the same rank.
The two new constructions examined in this thesis are local constructions focused on
polygons in abstract polytope. A polygon is any two-dimensional section of the face poset of
a polytope: for example, the cube clearly has square faces, but it also has triangular sections
(its vertex figures). The first construction examined is the digonal contraction. A digon
is an abstract polygon with just two vertices and two edges, and the presence of digonal
sections in an abstract polytope is sometimes viewed as a degenerate condition. Digonal
contraction is the operation of taking a digonal section, removing the greatest face of that
section altogether, and merging the two edges into a single edge. The second construction
examined is the polygonal contraction. Unlike digonal contraction, the aim here is not to
remove the polygon altogether, but to split it into two smaller polygons. This is done by
taking two non-adjacent vertices of the polygon (hence, the polygon must be at least a
square) and merging them, thus producing two smaller polygons in a natural way.
Neither of these contractions can be applied to arbitrary polygons in arbitrary polytopes;
both have various conditions that must be satisfied in order for the contraction to produce
an abstract polytope (otherwise, the contraction will just produce a poset which does not
qualify as an abstract polytope for one reason or another). However, there are specific cases
in which these contractions are very easy to apply (i.e. the conditions required for them to
produce abstract polytopes become much simpler). One example is contracting polygons
in a polytope lattice: a polytope lattice is a polytope which, when viewed as a poset,
satisfies the lattice condition. Polytope lattices cannot have digonal sections, and their
(non-triangular) polygonal sections can be contracted if and only if they lie on the lowest
level, i.e. their greatest face has rank 2. Contracting a polygon in a polytope lattice in this
way does not necessarily produce a polytope lattice, but will always produce a polytope.
Both contractions also have interesting interactions with the Helfand construction: after
applying the Helfand construction to a polytope (or locally to part of a polytope), we find
that certain new faces introduced by the Helfand construction can be easily contracted.
While both the digonal and the polygonal contraction are local constructions, it is some-
times possible to repeatedly apply them in a global way. Since the polygonal contraction is
more interesting, we examine it in particular. Given a (possibly infinite) set of contractible
polygons in a polytope, it is sometimes possible to contract all of them simultaneously. If
the initial polytope is highly symmetric and we choose polygons to contract in a symmetric
2

way, we find that the resulting polytope will have a similar automorphism group to the
original polytope (although it may have new combinatorial symmetries as well). We exam-
ine several cases like this when applied to highly symmetric face-to-face tessellations of the
plane by regular polygons.
3

Chapter 2
Basic Notions
In this chapter, we will introduce some well-known concepts relating to convex and abstract
polytopes. Important, well-established results will be presented without proof. The reader
is referred to Grunbaum (2003) for convex polytopes and to McMullen and Schulte (2002)
for abstract polytopes.
2.1 Basics of Convex Polytopes
Definition 2.1.1. The convex hull of a set of points M ⊆ Rn is the smallest convex set
containing M .
Proposition 2.1.1. For M = {x1, ..., xm} ⊂ Rn a finite set, the convex hull of M is the
set
{m∑i=1
λixi
∣∣∣∣ λi ∈ Rn ∀ i, 0 ≤ λi ≤ 1 ∀ i,m∑i=1
λi = 1
}.
For example, the convex hull of two different points is the line segment between the two
points. The convex hull of three different points is either a triangle with those points as
vertices (specifically, a ‘filled in’ triangle), or a line segment; this latter case occurs if the
points are colinear.
Definition 2.1.2. The affine hull of a set of points M ⊆ Rn is the smallest affine subspace
of Rn containing M (an affine subspace is a translation of a linear subspace).
Definition 2.1.3. A convex polytope is the convex hull of a finite set of points in Rn. The
rank or dimension, m, of a convex polytope P is the dimension of the affine hull of P ;
the polytope is then called an m-polytope. A 0-polytope is called a vertex, a 1-polytope is
4

called an edge or line segment, a 2-polytope is called a polygon, and a 3-polytope is called
a polyhedron.
For example, the square is a convex polytope. It can be represented as the convex
hull of four points in R2, or just as easily as the convex hull of four (coplanar) points
in R10; regardless, it is a rank-2 polytope. Other well-known convex polytopes include the
three-dimensional cube, the icosahedron, the truncated icosahedron (soccer ball), and the
tesseract (four-dimensional cube).
Definition 2.1.4. A proper face of a convex n-polytope P in Rn is any nonempty inter-
section of P with a closed half-space H of Rn such that none of the points of H lie in the
interior of P . The two improper faces of P are P itself and the empty set, which is con-
sidered a (−1)-face (these two faces are sometimes referred to as Fn and F−1 respectively).
Note that the intersection of any two faces of a convex polytope is also a face of the polytope
(if the intersection is empty, this is considered to be F−1).
For example, a 3-cube has eight 0-dimensional faces, or 0-faces (i.e. the vertices), twelve
1-faces (i.e. the edges), and six 2-faces (i.e. the squares). Note that every i-face of a convex
polytope P is a convex i-polytope (since it is the convex hull of the vertices of P contained
in the half-space defining that i-face).
Definition 2.1.5. A chain of a convex polytope is a set of faces such that every face is
incident to every other face. A flag of a convex polytope is a maximal chain - this implies
that the flag has exactly one face of each rank.
In Figure 2.1, we see a cube with a flag marked in red: the flag includes a vertex, an
edge, and a 2-face (note that the flag must also include the maximal face, i.e. the entire
cube, and the minimal face, i.e. the empty set, although these are not marked). The term
‘flag’ is consistent with the fact that such a drawing resembles a physical flag: the marked
edge is the flagpole, the marked vertex is the tip of the flagpole, and the marked 2-face is
the flag itself. In the Hasse diagram (Definition 2.2.2), a flag of an n-polytope is a strictly
rank-ascending path from the (−1)-face to the n-face of the polytope. Convex n-polytopes
have the property that given any flag Φ and any proper rank i, there is exactly one flag
Φi which is identical to Φ except at the rank-i face; this is called the i-adjacent flag to
Φ. We can confirm visually that the flag shown in the figure has exactly one 0-adjacent
flag (we would get this by marking the bottom vertex of the marked edge rather than the
5

Figure 2.1: A 3-cube, with a flag marked in red.
top vertex), exactly one 1-adjacent flag (we would get this by marking the top edge of the
marked square instead of the left edge), and exactly one 2-adjacent flag (we would get this
by marking the other square containing the marked vertex and edge; this square is not
visible in the diagram).
2.2 Posets and Symmetry
Definition 2.2.1. A partially ordered set, or poset (Stanley, 1986, Chapter 3), is a set P
with relation ‘≤’ satisfying:
(1) a ≤ a ∀ a ∈ P (reflexivity)
(2) a ≤ b ∧ b ≤ a⇒ a = b (antisymmetry)
(3) a ≤ b ∧ b ≤ c⇒ a ≤ c (transitivity)
This is called a partial ordering since not every two elements in P need to have the
relation apply to them. A lattice is a poset in which every two elements have a supremum
(least upper bound) and infimum (greatest lower bound).
A convex polytope P can be naturally viewed as a poset: P is identified with its face
set, and the relation F ≤ G can be read as ‘F is incident to G and has rank less than or
equal to that of G’. Moreover, they are ranked posets, meaning that all flags (maximal
chains) have the same length. This poset is called the face lattice of the polytope. Note
that the face lattice is indeed a lattice: given any two faces F and G of a polytope, we can
6

find a face A containing both and contained in every face containing both, and a face B
contained in both and containing all faces containing both (this is a nontrivial result).
Definition 2.2.2. A Hasse diagram of a convex n-polytope is a certain graphical description
of the faces of the polytope, their ranks, and their incidences (i.e. which faces are contained
in which), which is independent of any geometrical representation of the polytope. More
precisely, it is a graph in which the nodes represent the faces and in which edges represent
incidences between faces whose rank differs by 1.
In Figure 2.2, we see a square with every face labeled (except for the (−1)-face), and
below it we see its Hasse diagram: every vertex in the Hasse diagram is one of the faces of
the square, and they are arranged vertically in order of rank. Edges in the Hasse diagram
represent incidences between faces whose rank differs by 1.
The Hasse diagram is independent of the geometrical representation of the square in the
following sense: suppose the square pictured in Figure 2.2 has vertices at coordinates (0, 0),
(0, 1), (1, 0), and (1, 1) in R2. If we imagine a different square with vertices at other coor-
dinates in R2, or indeed in any Rn with n ≥ 2, it would still have the same Hasse diagram.
Indeed, we could even deform the square into a rectangle, rhombus, or any quadrilateral,
as long as the vertices were coplanar (and no vertex lay inside the convex hull of the other
three, since that would produce a triangle), and the Hasse diagram would be the same. All
of these different convex polytopes are called combinatorially equivalent/isomorphic to the
square: they correspond to the same combinatorial structure of faces and incidences.
Definition 2.2.3. A geometrical symmetry of a convex polytope is any isometry (distance-
preserving affine transformation) taking the polytope to itself.
Definition 2.2.4. A combinatorial symmetry of a convex polytope with face set F (this is
the set of all the faces of the polytope of every rank) is a bijection σ : F → F that preserves
rank and incidences.
Every geometrical symmetry is clearly a combinatorial symmetry, but the converse is
not necessarily true. For example, consider a non-square rectangle: geometrically, there
is no symmetry that rotates the rectangle by 90 degrees or reflects across a diagonal, but
combinatorially, there are such symmetries. We note that the set of geometrical symmetries
of a polytope P form a group, called G(P ), as do the set of combinatorial symmetries
(which we will refer to as ‘automorphisms’). This latter group will be referred to as the
7

Figure 2.2: The Hasse diagram of a square.
8

automorphism group of P , written Γ(P ). In this thesis we are interested in combinatorial
rather than geometrical symmetries. Often, when there is little chance of confusion, we use
the term ’symmetries’ in place of ’combinatorial symmetries’ or ’automorphisms’.
Definition 2.2.5. A convex polytope P is regular when Γ(P ) is transitive on the flags of
P , meaning that there exists an automorphism taking any flag of P to any other flag of P .
This is the notion of being combinatorially regular ; there is also the notion of being
geometrically regular, which is just the same statement applied to G(P ). By a result of
McMullen (1967), each combinatorially regular convex polytope is isomorphic to a geomet-
rically regular convex polytope (see also McMullen and Schulte, 2002, Section 1B).
The regular 2-polytopes are exactly the polygons; in fact, the only 2-polytopes are the
polygons, so all convex 2-polytopes are regular, although they may not be geometrically reg-
ular, depending on how they are represented on the plane (e.g. a square versus a rectangle).
The regular convex 3-polytopes are exactly the tetrahedron, the cube, the octahedron, the
icosahedron, and the dodecahedron, as well as all 3-polytopes combinatorially equivalent to
the aforementioned (e.g. parallelepipeds, which are combinatorially equivalent to cubes).
Most convex 3-polytopes are not regular. For example, any pyramid over a non-triangular
polygon is not regular (a pyramid over an (n − 1)-polytope Q in Rn is the convex hull of
Q and a single point, called the apex, outside the affine hull of Q; this is an n-polytope).
Similarly, any prism over a non-square polygon is not regular (a prism over an (n − 1)-
polytope Q in Rn is the convex hull of Q and a translate of Q outside the affine hull of
Q; this is an n-polytope). Figure 2.3 shows the prism and pyramid over a pentagon. Note
that a non-regular polytope may still be highly symmetric: for example, the soccer ball is
vertex-transitive, meaning that there is a symmetry taking any vertex to any other vertex.
An important property of regular polytopes is the following (McMullen and Schulte,
2002, Proposition 2B8): for any regular n-polytope P , given any flag Φ, called the base flag,
we have that Γ(P ) = 〈ρ0, ..., ρn−1〉, where ρi is the automorphism taking Φ to Φi. The
{ρi} are called the distinguished generators of Γ(P ) relative to the base flag Φ. Note that
an automorphism on a regular polytope is uniquely determined by its action on a base flag.
Also, each ρi is given by a reflection if P is a geometrically regular convex polytope.
We see a simple example of this in Figure 2.4. In this figure, we have as our polytope
P the square and n = 2. The base flag Φ is shown in red: this is represented as a triangle
which contains the base vertex v, lies along the base edge e, and moves into the square
9

Figure 2.3: The pyramid and prism over a pentagon.
Figure 2.4: The distinguished generators of a square.
10

itself, P (such a representation of a flag is called a fundamental region). The 0-adjacent
flag to Φ, denoted Φ0, is shown in orange to the left of Φ: this flag differs from Φ only in
its 0-face, i.e. its vertex. The 1-adjacent flag to Φ, denoted Φ1, is shown in orange below
Φ: this flag differs from Φ only in its 1-face, i.e. its edge. We can visually verify that the
reflection ρ0 (shown in blue) moves Φ to Φ0 and the reflection ρ1 moves Φ to Φ1; moreover,
these two reflections generate the entire symmetry group of the square (composing them
gives us a 90-degree rotation; performing this rotation repeatedly on either Φ or Φ0 lets us
move to any flag of the square).
Definition 2.2.6. Given a convex polytope with two faces F ≤ G, the section G/F is the
set of faces {H | F ≤ H ≤ G}. This is isomorphic to a convex polytope of dimension
rk(G)− rk(F )− 1.
For example, consider the cube: let F be a vertex of the cube and let G be the cube
itself. Then G/F consists of the vertex F , the three edges incident to that vertex, the three
squares incident to the vertex, and the cube itself. We see in Figure 2.5 that the Hasse
diagram of this section is the same as the Hasse diagram of a triangle; hence, we can view
this section as a triangle. In fact, every section of a convex polytope is isomorphic to a
convex polytope in this same sense.
Definition 2.2.7. An (i-face)-figure of a polytope P is a section P/F where rk(F ) = i.
For example, Figure 2.5 shows a vertex figure of a cube.
Definition 2.2.8. A polygon at level i of a polytope P is a rank-two section of P , with
greatest face of rank i in P .
For example, Figure 2.5 shows that cubes have triangles at level 3.
Definition 2.2.9. A convex polytope is called equivelar when, for every rank i, every rank-2
section at that rank (i.e. every two-dimensional section where the difference in rank between
the least and greatest faces of the section is 3 and the greatest face of the section has rank i)
is a polygon with the same number of vertices. Then the Schlafli symbol of such a polytope
lists the sizes of these polygons in order of rank.
For example, the cube is equivelar (this is implied by it being regular): all sections G/F
with rk(G) = 2 are squares, and all sections G/F with rk(G) = 3 are triangles. Hence, the
Schlafli symbol of the cube is {4, 3}.
11

Figure 2.5: A triangular 2-section of a cube.
12

2.3 Abstract Polytopes
Definition 2.3.1. An abstract polytope is a poset P with elements called faces such that
it has the following properties:
(P1) P has a least face (a face F−1 such that ∀ F ∈ P, F−1 ≤ F ) and greatest face (a
face Fn such that ∀ F ∈ P, F ≤ Fn).
(P2) All flags have the same number of faces, i.e. P is ranked.
(P3) P is strongly connected. In particular, P is connected, meaning that we can get
from any proper face to any proper face via a finite sequence of successive incidences between
proper faces, or P is rank 1. But in fact, P is even strongly connected, meaning that every
section of P is connected.
(P4) For every pair of faces F ≤ G with rk(G) = rk(F ) + 2, the section G/F has
exactly two proper faces. This is called the diamond condition.
A non-trivial, but very important fact, is that every convex polytope, if viewed as a
poset as described above, is an abstract polytope (this helps justify the term ‘polytope’ for
the above posets). From here on out, if we simply refer to a ‘polytope’, we mean an abstract
polytope.
Another important fact (this one is fairly easy to show) is that every section of a polytope
is itself a polytope.
Just as with convex polytopes, we can define a Hasse diagram for any abstract polytope,
in the same way: the nodes of the diagram represent the faces and the edges of the diagram
represent incidences between faces whose rank differs by 1. Then every abstract polytope
is completely described by its Hasse diagram.
A useful note about connectivity: the condition of a poset being connected is equivalent
to it being flag-connected : P is flag-connected if and only if any flag can be joined to any
other flag via a finite sequence of successively adjacent flags. Similarly, the condition (P3) of
strong connectivity is equivalent to the condition of strong flag-connectivity : P is strongly
flag-connected if and only if every section is flag-connected, or equivalently, any flag Φ can
be joined to any other flag Ψ via a finite sequence of successively adjacent flags such that
every flag in the sequence contains Φ ∩Ψ.
There are many abstract polytopes which are not convex polytopes, and they can often
(though not always) be hard to visualize. In rank 1, there is exactly one abstract polytope,
the line segment (which is also convex). In rank 2, the abstract polytopes consist of all
13

convex polygons as well as the digon and the apeirogon: the digon is a polygon with
two vertices and two edges, and the apeirogon is a polygon with infinitely many vertices
and edges. In rank 3, there are too many different kinds of polytopes to list, but well-
known examples include the planar tessellation by squares, and the hemicube. All of the
aforementioned polytopes are also regular (an abstract polytope P is regular if Γ(P ) is
flag-transitive).
Note that the hemicube, shown in Figure 2.6, has only four vertices, six edges, and three
faces (e.g. the two nodes of the diagram labeled b represent the same vertex); in this way
it can be thought of as half of a cube. Unlike convex polytopes, abstract polytopes need
not be a lattice: for example, the two edges of a digon do not have an infimum (since both
vertices of the digon are contained in both edges, but neither vertex contains the other),
nor do any two 2-faces of a hemicube (since every pair of 2-faces shares two edges). If an
abstract polytope is a lattice, we call it a polytope lattice. Again, every convex polytope
is a polytope lattice, but there are polytope lattices which are not convex polytopes (e.g.
{4, 4}, shown in Figure 2.6).
Note: the pyramid and prism constructions on convex polytopes, described earlier, can
be extended to abstract polytopes as follows:
Definition 2.3.2. Given an n-polytope P , the pyramid over P is the poset P ′ obtained by
taking P as a subposet and creating a new (i + 1)-face F ′ for every i-face F in P (with
i ≥ −1) so that every F ′ contains its corresponding old face F as well as every face G′ such
that F > G in P . Then P ′ is in fact an (n+ 1)-polytope.
Definition 2.3.3. Given an n-polytope P , the prism over P is the poset P ′ obtained by
taking P as a subposet and creating a new i-face F ′ for every i-face F in P with i ≥ 0
so that every new face F ′ contains the new face G′ if F > G in P ; additionally, for every
i-face F in P with i ≥ 0 a new (i + 1)-face F is created such that F > F, F ′ and every F
contains the face G if F > G in P . Then P ′ is in fact an (n+ 1)-polytope.
Definition 2.3.4. In a polytope, if G is a j-face of an i-face F then the corank of G in F
is given by i− j, and G is called a corank i− j face of F .
Definition 2.3.5. The 1-skeleton of an n-polytope P is the poset composed of its vertices
and edges.
14

Figure 2.6: Examples of abstract polytopes which are not convex polytopes.
15

For example, the 1-skeleton of a cube consists of all eight vertices and twelve edges of
the cube, but not the (−1)-face, the six squares, or the 3-face.
Lemma 2.3.1. For any polytope P , a sequence of successively incident proper faces can be
found from any vertex or edge F , to any vertex or edge G, such that each member of the
sequence is itself a vertex or edge (or, abusing notation, we might say that the skeleton of
P is connected).
Proof. Since P is connected, we have a sequence of successively incident proper faces {F =
P0, ..., Pm = G} taking F to G. If no member of the sequence has rank at least 2, we are
done. Suppose otherwise: choose a member Pi of the sequence with greatest rank among all
members of the sequence (there may be several such members). Since the section Pi/F−1
is a polytope, it is connected, and since it has rank at least 2, we can find a sequence of
successively incident proper faces in Pi/F−1 taking Pi−1 to Pi+1; note that each member of
this new sequence has rank less than that of Pi. Then we can take our original sequence of
faces and remove Pi by replacing it with the new sequence we just found. We can continue
doing this until every member of the sequence has rank at most 1, and thus produce the
desired sequence.
Definition 2.3.6. The dual of an n-polytope P is the poset P ∗ with the same face set but
reversed incidence structure. Thus each i-face of P = Fn/F−1 is an (n − i − 1)-face of
P ∗ = F−1/Fn.
It is clear that the dual of a polytope is also a polytope (it is easy to see that the
conditions for being a polytope still hold on the dual given that they hold for the original
polytope), and the dual of a polytope lattice is also a polytope lattice. It is less clear, but
still true, that the dual of a convex polytope is also a convex polytope. For example, the
dual of the 3-cube is the octahedron: the eight vertices of the cube, which have triangular
vertex figures, become the triangular faces of the octahedron; the twelve edges of the cube
become the twelve edges of the octahedron; and the six square faces of the cube become the
six vertices of the octahedron, which have square vertex figures. An easy way to visualize
the dual of a relatively simple polyhedron is to put a new vertex in the middle of each of
the old polytope’s facets, and connect two of these vertices with an edge whenever the two
corresponding facets share an edge. Throughout this thesis, we will implicitly refer to dual
polytopes whenever we reverse the order of two faces: i.e., if we have a section G/F of a
polytope, then F/G refers to the dual of that section.
16

2.4 Graph Theory and Polytopes
Here, we present some basic graph theory that will be used later. The reader is referred to
West (2001) for this material.
Definition 2.4.1. A graph is a pair (V,E) consisting of a set V whose members are called
vertices, and a multiset E of unordered pairs of distinct vertices whose members are called
edges. (Hence, multiple edges may contain the same two vertices.)
For example, the Hasse diagram of a square, shown in Figure 2.2, can be viewed as
a graph: the vertices are the nodes corresponding to each face of the polytope, and the
edges are the incidences between faces which differ in rank by 1. Of course, viewing the
Hasse diagram as a graph only, means that we no longer know about the rank of each
vertex; graphs are independent of their graphical representation. Hence, the same graph
corresponds to multiple Hasse diagrams; for example, dual polytopes have the same Hasse
diagram.
Remark 2.4.1. Although this is not important for this thesis, an interesting point is the
following: we can define a digraph, or directed graph, similarly to a graph, but instead of the
edges being unordered pairs, they are ordered pairs; we can view each edge as ‘pointing’ out
of one vertex and into another. Then we can convert a Hasse diagram to a digraph by setting
the edges so that the first vertex in the ordered pair has lower rank than the second vertex.
If we do this, we find that the resulting digraph has exactly one vertex with the property that
all edges containing that vertex are pointing out of the vertex (i.e. the vertex corresponding
to the (−1)-face), and one vertex with the property that all edges containing the vertex are
pointing into the vertex (i.e. the vertex corresponding to the n-face); using this, it becomes
clear that we can actually reconstruct the rank of each vertex from the digraph, and so the
digraph completely represents the Hasse diagram and therefore the polytope itself.
Definition 2.4.2. A subgraph of a graph G = (V,E) is a graph G′ = (V ′, E′) so that
V ′ ⊆ V and E′ ⊆ E (since G′ is a graph as well, it must be the case that every vertex in
any edge of E′ is a member of V ′).
For example, if we take G as the graph corresponding to the Hasse diagram of the square,
one possible subgraph G′ consists of all vertices of G corresponding to faces of rank at least
1, and all edges whose least-rank vertex has rank at least 1. This means that G′ is basically
the top third of the Hasse diagram.
17

Definition 2.4.3. Given a graph G = (V,E) and a set V ′ ⊆ V , the induced subgraph of
G (induced by V ′) is the subgraph consisting of all vertices of V ′ and all edges in E which
join two vertices of V ′.
For example, the subgraph G′ described above is induced by the set of the five vertices
of G corresponding to the faces of the square with ranks 1 and 2.
Definition 2.4.4. A path of a graph G is a sequence of vertices and edges of G of the form
v1, e1, v2, e2, ..., ek−1, vk (k ≥ 1), such that all vertices (and therefore, edges) in the sequence
are distinct and every edge in the sequence contains the vertices directly before and after it.
For example, if G is again the graph corresponding to the Hasse diagram of the square,
each flag of the square corresponds to two paths: one path moves from F−1 up through the
flag to F2, and the other path moves from F2 down through the flag to F−1.
Definition 2.4.5. A graph G = (V,E) is connected if for all pairs of vertices v1, v2 ∈ V ,
the vertices v1 and v2 are joined by a path in G; otherwise, it is disconnected.
Definition 2.4.6. A connected component of a graph G is a maximal, connected, induced
subgraph of G.
Remark 2.4.2. Every graph can be partitioned into its connected components, i.e. no two
connected components have a vertex in common and the union of (the vertex and edge sets,
respectively, of) all connected components is (the vertex and edge set, respectively, of) the
graph itself.
So far, all graphs we have looked at have been connected; however, if we take the
graph corresponding to the Hasse diagram of the square and remove all edges between
vertices corresponding to 0-faces and vertices corresponding to 1-faces, then the result is a
disconnected graph with two connected components (one of which is exactly the graph G′
described above).
Definition 2.4.7. An edge cut of a connected graph G = (V,E) is a set E′ ⊆ E such that
the subgraph G′ = (V,E \ E′) is disconnected.
For example, if G is the graph corresponding to the Hasse diagram of the square, then
the set of edges joining a vertex corresponding to a 0-face to a vertex corresponding to a
1-face is an edge cut of G.
18

Definition 2.4.8. The edge graph of an abstract polytope P is the graph (possibly with
multiple edges) whose vertices are the vertices of P and whose edges are the edges of P
(note that this is indeed a graph).
For example, the edge graph of the 3-cube has eight vertices (i.e. the eight vertices of
the cube) and twelve edges (i.e. the twelve edges of the cube).
Definition 2.4.9. A cycle (of length k) of a graph G is a sequence of vertices and edges
of G of the form v1, e1, v2, e2, ..., ek, v1 (k ≥ 2), such that all vertices (and therefore, edges)
in the sequence are distinct (except for the first and last vertices, which are identical) and
every edge in the sequence contains the vertices directly before and after it.
Proposition 2.4.3. Let G be a connected graph with a cycle. Let e be an edge of the cycle.
Then {e} is not an edge cut of G.
Proof. Let G′ be the graph obtained by removing e from G. We show that given any two
vertices v1, v2 of G′, we can find a path from v1 to v2 in G′, or equivalently, a path from
v1 to v2 in G not passing through e. Since G is connected, we have a path from v1 to v2
in G. If this path does not pass through e, we are done. Suppose the path passes through
e - let v3 be one vertex of e and v4 be the other vertex of e, so that the path starts at v1,
eventually hits v3, then passes through e to v4, and eventually hits v2. Then we produce
a new sequence of vertices and edges as follows: we start at v1 and move to v3 as in the
old path. Then we move along the cycle to pass from v3 to v4 without passing through e
(this is possible since there are always two exactly distinct paths from one vertex to another
vertex in a cycle, one ‘clockwise’ and one ‘counter-clockwise’). Then we move from v4 to v2
as in the previous path. It is possible that this new sequence is not a path because vertices
are repeated, e.g. some vertex v5 appears at one point in the sequence and then appears
again later. If this happens, we shorten the sequence by removing everything after the first
occurrence of v5 but before the last occurrence of v5; we perform this process until there
are no repeated vertices, and as a result, we have a path from v1 to v2 in G not passing
through e, i.e. a path from v1 to v2 in G′. Hence, G′ is connected, and so {e} is not an edge
cut of G.
Proposition 2.4.4. Let G be a connected graph and let e be an edge of G so that {e} is an
edge cut of G. Then G′, the graph obtained by removing e from G, has exactly two connected
components.
19

Proof. Suppose that G′ has more than two connected components (clearly it must have at
least two). Choose three vertices v1, v2, v3 of G′ so that they lie in three different connected
components. Then there is no path between any two of these vertices in G′. Since G is
connected, any two of these vertices have a path between them in G. Since these paths are
not paths in G′, each of these paths must pass through e in G. Let v4 and v5 be the vertices
of e in G. Denote the path from v1 to v2 in G by P12, the path from v1 to v3 by P13, and
the path from v2 to v3 by P23. Say P12 passes through v4 before v5.
Suppose P23 passes through v4 before v5. Then we can produce a new path by taking P12
from v1 to v4, and then taking P23 backwards from v4 to v2 (as in the previous proposition,
we can truncate as needed to avoid repeated vertices); this path moves from v1 to v2
without passing through e, so v1 and v2 lie in the same connected component of G′, giving
us a contradiction.
Hence, P23 must pass through v5 before v4. Then we can produce a new path by taking
P12 from v1 to v4, and then taking P23 from v4 to v3; this path moves from v1 to v3 without
passing through e, so v1 and v3 lie in the same connected component of G′, again giving us
a contradiction.
Therefore, we have a contradiction in every case, and so G′ must have exactly two
connected components.
Corollary 2.4.5. Let G be a connected graph with a cycle, and let e1 and e2 be two distinct
edges of the cycle. Then if {e1, e2} forms an edge cut of G, the graph G′ = G \ {e1, e2} :=
(V,E \ {e1, e2}) has exactly two connected components.
Proof. Let H be the graph obtained by removing e1 from G. By Proposition 2.4.3, H is
connected. Note that G′ is the result of removing e2 from H. Then by Proposition 2.4.4, G′
has exactly two connected components.
20

Chapter 3
Digonal Contraction
In this chapter, we will introduce a new construction on abstract polytopes which lets us
remove digons under certain conditions. We first present some useful lemmas.
3.1 Preliminary Results for Digonal Contraction
Lemma 3.1.1. Suppose P is an n-polytope and E a non-empty set of facets of P such that,
for every (n− 2)-face of P , the facets containing the (n− 2)-face either both belong to E or
both do not belong to E. Then E is the set of facets of P .
Proof. Suppose there is a facet J not contained in E . Since P is flag-connected, we must
have a sequence of pairwise-adjacent flags taking any flag containing J to any flag containing
any E ∈ E . This means that we must at some point move from a flag with its facet not in E ,
to an (n− 1)-adjacent flag with its facet in E . Then those two flags share an (n− 2)-face,
which (by the diamond condition) is contained in exactly one facet from E . However, this
contradicts our assumption on E , so no such J can exist.
Lemma 3.1.2. Suppose we have a polytope P with an i-face F containing (i− 1)-faces H
and H ′ and a common corank-2 face of H and H ′. If all common corank-2 faces R of H
and H ′ are such that the 1-sections H/R and H ′/R of P have the same proper faces, then
F contains no (i− 1)-faces other than H and H ′.
Proof. Let R denote the set of all common corank-2 faces of H and H ′. Suppose all faces
R in R are such that H/R and H ′/R have the same proper faces. Suppose that F contains
an (i− 1)-face I distinct from H and H ′.
21

Suppose there is an (i− 2)-face A contained in both I and either H or H ′: WLOG let
A < H. Then we cannot have A < H ′, since this would violate the diamond condition
between F and A. Examine the section H/F−1. Let E be the set of (i− 2)-faces in H/F−1
containing a face in R: clearly this is a nonempty set since R is nonempty and every face
in R is contained in H. Thus every face E in E contains a face R in R. Since H > R and
H ′ > R and the two sections H/R and H ′/R have the same proper faces, we have E < H ′.
Now let B be any (i−3)-face in H/F−1 with B < E for some E in E . Then we have B < H
and B < H ′, so B ∈ R, so both proper faces of H/B are in E . Hence, E is a nonempty
set of (i− 2)-faces of the (i− 1)-polytope H/F−1 such that every (i− 3)-face B containing
any face in E must contain another face in E , so by Lemma 3.1.1, A must also be in E and
hence contain a face in R; however, this is impossible since we established that we do not
have A < H ′, so we have a contradiction.
Hence, in P , there can be no (i − 2)-face A contained in both I and either H or H ′.
Then, since I here is just any (i− 1)-face distinct from H and H ′, we see that in fact any
(i − 2)-face A contained in one of H or H ′ must also be contained in the other: by (P4)
we know that F/A must have two proper faces, but if one proper face is H then the other
proper face cannot be any face other than H ′, and similarly with H and H ′ interchanged.
Now consider the section F/F−1. Let H be the set of (i − 1)-faces {H,H ′}. We know
that any (i − 2)-face contained in any face in H must be contained in another face in H,
so by Lemma 3.1.1 applied to H, I must be in H; however, this is impossible since by
assumption I is distinct from H and H ′, so we have a contradiction. Hence, F contains no
(i− 1)-faces other than H and H ′.
Lemma 3.1.3. Suppose we have a polytope P with an i-face F containing (i− 1)-faces H
and H ′ and a common corank-2 face of H and H ′. If all common corank-2 faces R of H
and H ′ are such that the 1-sections H/R and H ′/R of P have the same proper faces, then
each face contained in both H and H ′ is also contained in a common corank-1 face of H
and H ′.
Proof. Suppose all common corank-2 faces R of H and H ′ are such that the 1-sections H/R
and H ′/R have the same proper faces. Then by Lemma 3.1.2, F contains no (i − 1)-faces
other than H and H ′. Let A be any face such that A < H,H ′. Then A < F and A has
rank at most i− 2. Find an (i− 2)-face B (possibly equal to A) such that A ≤ B < F . By
the diamond condition between F and B, there must be two (i− 1)-faces containing B and
22

contained in F ; by Lemma 3.1.2, these faces must be exactly H and H ′. Hence, B < H,H ′,
so A is contained in B, which is a common corank-1 face of H and H ′.
Proposition 3.1.4. Given a polytope P with a 1-section L whose greatest face, of rank
i ≥ 2 (in P ), is called F and whose intermediate faces are called H and H ′, we can produce
a poset P ′ from P by removing F and every other i-face containing both H and H ′ (we call
the set of all such faces F , with F one of them), and combining H and H ′ into a single
face. In P ′, the combined face inherits all incidences of H and H ′ in P (except for those
involving the removed faces in F) while all other incidences are unchanged. In particular,
P ′ can only be a polytope if for every corank-1 face G of the least face of L, the 2-section
F/G in P is a digon (equivalently, every F ′/G is a digon for every F ′ in F). If P ′ is indeed
a polytope, we call the operation of moving from P to P ′ a digonal contraction.
Proof. Suppose we have some corank-1 face G of the least face A of L such that F/G is
not a digon. Then there exist faces B and C of P such that A and B lie between H and
G, and A and C lie between H ′ and G. We must have B 6= C since we would otherwise
have a digon F/G. Then in P ′, we have three distinct faces A, B, and C between H and
G, violating (P4), so P ′ is not a polytope.
Note that removing only some of the faces in F and not others will never result in P ′
being a polytope since (P4) will be violated between every non-removed face in F and the
merged face H (there will be exactly one face between them in P ′).
3.2 The Digonal Contraction Theorem
Theorem 3.1 (Digonal Contraction Theorem). Suppose P is an n-polytope with a digon
D whose greatest face is at rank i and is called F , and whose (i− 1)-faces are called H and
H ′, with the set of all i-faces containing both H and H ′ called F (so F ∈ F). Suppose that
we have produced a poset P ′ by performing digon contraction on D as in Proposition 3.1.4.
Then P ′ is a polytope if and only if the following conditions hold in P :
(1) No two of the i-faces in F are contained in a common (i+ 1)-face.
(2) All faces containing both H and H ′ also contain some face in F .
(3) All common corank-2 faces R of H and H ′ are such that F ′/R is a digon for every F ′
in F .
(4) For every (i + 2)-face I incident to both H and H ′ in P , the rank-2 section I/H is
23

Figure 3.1: Digonal contraction on a cube-like polytope.
connected in P ′.
In particular, if P ′ is a polytope, it is rank-(n− 1) or rank-n, according as F is the greatest
face of P or not.
Note that Condition (4) is a condition on P ′ and not P : this is for simplicity, as the
corresponding equivalent condition on P is nontrivial to state. We examine Condition (4)
in more detail after the proof of this theorem.
An example of digonal contraction can be seen in Figure 3.1: on the left, we have a
polyhedron P which is identical to a cube, except that it has a digon added in where one of
the edges of the cube would be; on the right, we have the cube P ′, the result of the digonal
contraction.
Proof. In the first part of this proof, we will show that for P ′ to be a polytope, all four
conditions must hold. We show this by proving first that P ′ is not a polytope if (1) does not
hold, then that P ′ is not a polytope if (1) holds but (2) does not hold, then that P ′ is not
a polytope if (1) and (2) hold but (3) does not hold, and finally that P ′ is not a polytope if
all of the conditions hold except (4). In the second part of the proof, we will show that the
conditions are sufficient for P ′ to be a polytope, i.e. if all four of the conditions hold then
P ′ is a polytope.
First, suppose that (1) does not hold, i.e. some (i+ 1)-face G of P contains more than
one face in F ; say it contains both F ′ and F ′′. Examine the section G/F−1 of P , and
24

compare it to the section G/F−1 of P ′ (if G does not contain F−1 in P ′ then of course
P ′ is not a polytope, so we assume that it does). We note that it is impossible for G
in P ′ to contain the merged face H, since this would mean we have some i-face I in P ′
such that H < I < G, but then in P , we have I < G and either H < I or H ′ < I
(but not both, because otherwise I would have been removed), which violates the diamond
condition between H and G or H ′ and G in P ′, respectively, since we already have F ′ and
F ′′ between H and G and between H ′ and G. Hence, in G/F−1 in P ′, the face H does not
occur. Therefore, we see that G/F−1 in P ′ consists of the section G/F−1 of P with some
i-faces removed. However, this means that G/F−1 is not a polytope in P ′, so P ′ itself is
not a polytope: given any polytope, removing faces from it while preserving the rank will
necessarily produce a poset that is not a polytope - by removing faces we remove flags, and
by removing flags we necessarily deprive some (not removed) flag of its m-adjacent flag for
some m, which breaks connectivity. Hence, (1) is necessary for P ′ to be a polytope.
Now suppose that (1) holds but (2) does not hold, so in particular H and H ′ are both
contained in some face G (necessarily of rank at least i + 1) which does not contain any
face in F . Let A be a common corank-1 face of H and H ′. We may assume that every
proper face of G/A in P contains at most one of H or H ′ (otherwise, we can replace G by
a proper face of G containing both H and H ′; since none of these proper faces contain any
of the faces from F , which are the only i-faces containing both H and H ′ by definition, we
will eventually find a face G of rank at least i + 1 containing both H and H ′, with each
of its proper faces containing at most one of them). Suppose G has rank i + 1: then the
proper faces of G/H in P are both distinct from the proper faces of G/H ′ since G contains
no face from F , but then in P ′ there are four proper faces of the 1-section G/H, violating
(P4). Hence, G must have rank at least i+ 2. If P ′ is a polytope, then in the section G/H
of P ′ we can find a sequence of proper incident faces taking us from any proper face to
any other proper face (note that G/H is at least of rank 2) - in particular, we can take a
corresponding sequence from a face of P containing H and not H ′ to a face of P containing
H ′ and not H (in P ′, the faces H and H ′ are identified, so all faces containing the merged
face H in P ′ contain H or H ′, or both, in P ). Since G/H is a section of G/A in P ′, every
proper face of G/H in P ′ must contain exactly one of H or H ′ in P (we established earlier
that every proper face of G/A in P contains at most one of H or H ′). But if we have a
sequence of incident proper faces of G/H in P ′ taking us from a face containing only H to
a face containing only H ′, then at some point we must pass through a face containing both:
25

if some face B contains H and some face C contains H ′, and the two faces are incident (say
B contains C), then one of them must contain both H and H ′ (so B would contain both).
This gives us a contradiction. Hence, P ′ is not a polytope. Therefore, (2) is necessary for
P ′ to be a polytope.
Now suppose that (1) and (2) hold but (3) does not hold, i.e. we have a common corank-
2 face R of H and H ′ such that F ′/R is not a digon for some F ′ in F . Then in the 2-section
F ′/R of P , the subsections H/R and H ′/R do not share both of their proper faces with
each other, so we have at least three distinct faces between H and R in P ′, violating the
diamond condition. Hence, (3) is necessary for P ′ to be a polytope.
Finally, (4) is clearly necessary for P ′ to be a polytope: if we have a disconnected section
I/H in P ′, then (P3) does not hold for P ′, and so P ′ is not a polytope.
Thus, all four conditions are necessary for P ′ to be a polytope; it remains to show that
the conditions are sufficient. Also note that (3) implies, by Lemma 3.1.2, that each face
in F contains only two (i− 1)-faces, namely H and H ′.
We now check the four defining conditions of a polytope on P ′ given the four conditions
of this theorem.
(P1): We see that P ′ has exactly one least face, i.e. the least face of P . This is because
we can still trace a path of incident faces descending in rank from any face of P ′ to the
least face of P since any (i + 1)-face of P containing any face in F has at least one other
corank-1 face by the diamond condition, and this face cannot be in F by (1). Suppose F is
the greatest face of P : then P ′ has exactly one greatest face, i.e. the merged face H, since
now P only has two rank-(n− 1) faces. Suppose otherwise: then by the diamond condition
at rank i and by (1), any (i− 1)-face contained in a face in F is also contained in at least
one face not in F , so since (P1) holds for P , it also holds for P ′, with the same greatest
face.
(P2): Suppose F is the greatest face of P : then since P ′ has exactly one greatest face,
i.e. the merged face H, it has property (P2) and is of rank n− 1 since P has property (P2)
and is of rank n. Suppose otherwise: then every (i+ 1)-face of P containing a face from Fhas at least one corank-1 face not in F by the diamond condition and (1), and in P every
corank-1 face of every face in F in P is contained in at least one i-face not in F , again by
the diamond condition and (1), so since P has property (P2) and is of rank n, P ′ also has
property (P2) and is of rank n.
(P4): Consider a pair of faces A and B in P ′ such that A < B and rank(A) + 2 =
26

rank(B). The arguments of the proof depend on rank(A).
Suppose rank(A) > i: clearly A and B have exactly two faces between them in P ′, since
no faces of rank greater than i have been changed via our operation.
Then suppose rank(A) = i: then A and B still have exactly two faces between them,
since the only way the i-faces changed via our operation was in the removal of the faces
in F , so A must correspond to some face in P which is not in F , so we have the diamond
condition for this case as well.
Then suppose rank(A) = i − 1. If A does not lie in a face of F in P , then A is not
in D and the set of i-faces containing A in P ′ is the same as the set of i-faces containing A
in P , so we again have the diamond condition. If A < F ′ in P for some F ′ in F , then (3)
with Lemma 3.1.2 implies that A = H or A = H ′. Suppose in P the (i+ 1)-face B contains
some face of F : then by (1) we have a unique i-face FH /∈ F such that H < FH < B,
as well as a unique face FH′ /∈ F such that H ′ < FH′ < B; then, FH 6= FH′ , since the
only faces having both H and H ′ as corank-1 faces are in F . Then in P ′, the faces H and
H ′ are identified, and so we find that FH and FH′ are exactly the faces of P ′ between A
and B, so the diamond condition is satisfied in this case. Now if B does not contain any
face from F in P , and A = H (say), then by the diamond condition we have exactly two
i-faces between H and B in P , and neither can contain H ′ since the faces in F are the only
i-faces containing both H and H ′. Moreover, by (2), B cannot contain H ′, so in P ′ there
are exactly two faces between A and B, giving us the diamond condition. The argument
for A = H ′ is similar. This covers all cases for rank(A) = i− 1.
Then suppose rank(A) = i− 2: first suppose A is in D. If both faces between A and B
in P are outside of D, then clearly there are still exactly two faces between A and B in P ′.
If exactly one face between A and B in P is in D, then we clearly still have exactly two
faces between A and B in P ′ (say we have A < H < B in P ; we also know A < H ′, so we
cannot have H ′ < B in P , so in P ′ the section B/A is unchanged). Finally, it is impossible
that both faces between A and B in P are in D, since the only i-faces containing both H
and H ′ are in F and so we would have B ∈ F , but this is impossible since the faces in Fare not in P ′. Now suppose A is not in D. Again, by similar arguments, we see that there
are exactly two faces between A and B in P ′, and so the diamond condition is satisfied in
this case.
Next, suppose rank(A) = i− 3: the only case we need consider is when B is in D (i.e.
B = H or B = H ′), since otherwise the relevant faces and incidences are identical for P
27

and P ′. WLOG say B = H. If A is not incident to H ′, then clearly the faces in B/A in P ′
are exactly the faces in B/A in P , so the diamond condition holds. If A is incident to H ′,
it is contained in both H and H ′, and so by (3) we find that the two faces between A and
H in P are the same as the two faces between A and H ′ in P : therefore, we have exactly
two faces between A and B in P ′, so again the diamond conditon holds.
Finally, if rank(A) < i−3, then clearly the diamond condition holds in P ′ since it holds
in P and no relevant faces or incidences are modified. Therefore, the diamond condition
holds for all cases.
(P3): We wish to show that P ′ is strongly connected. We will first show that H/F−1 is
strongly flag-connected in P ′. Consider a section of H/F−1 in P ′: if this section does not
contain H, it is identical to a section of P , and is therefore a polytope and hence strongly
connected. If the section does contain H, call it H/A and say we want to get from some
proper face X to some proper face Y of H/A in P ′ via a sequence of proper successively
incident faces. If in P both X and Y are contained in H (or both X and Y are contained
in H ′, respectively), then since H/A (or H ′/A, respectively) is a polytope in P , we can get a
sequence of proper successively incident faces of H/A in P ′ taking X to Y . If this is not the
case, say in P , the face X is only contained in H and Y is only contained in H ′. Then by
(3) and Lemma 3.1.3, we have some common corank-1 face B of H and H ′ such that A < B.
Then we can find a sequence of proper successively incident faces taking X to B in H/A
in P , and we can then find a sequence of proper successively incident faces taking B to Y
in H ′/A in P ; concatenating these two sequences, we get a sequence of proper successively
incident faces taking X to Y in H/A in P ′. Hence, H/F−1 is strongly connected in P ′, and
is therefore strongly flag-connected.
Now, we will show that given any face C > H in P ′, the section C/H is connected.
Suppose in P the face C contains only one of the faces H or H ′, say H (it must contain at
least one of the faces H or H ′ in P since C > H in P ′). Then C/H in P ′ is identical to
C/H in P , so clearly it is connected; we can make a similar argument if C > H ′ in P . Now
suppose otherwise, i.e. that C is incident to both H and H ′ in P ′. If rk(C) < i + 2, then
C/H is trivially connected in P ′, and if rk(C) = i+ 2, then C/H is connected in P ′ by (4).
Then suppose rk(C) > i + 2; let rk(C) = k. It is sufficient to show that the 1-skeleton of
H/C is connected in (P ′)∗, the dual of P ′: if this is the case, then we can move between any
two proper faces X and Y of C/H in P ′ by moving from X up to a (k−1)-face, then moving
along the 1-skeleton of H/C (i.e. along the (k− 1)-faces and (k− 2)-faces of C/H in P ′) to
28

a (k− 1)-face containing Y , and then moving down to Y . To this end, we determine which
faces are in the 1-skeleton of H/C in (P ′)∗. Let E be a face in the 1-skeleton of H/C in P ∗,
i.e. H < E < C in P and rk(E) = k − 2 or rk(E) = k − 1. Since k > i + 2, we know
that rk(E) > i. Therefore, E /∈ F , and so E occurs in P ′. Moreover, by (2), E contains
some face F ′ ∈ F . Let J be an (i + 1)-face in P such that F ′ < J ≤ E. By (P4) on the
1-section J/H, we have an (i + 1)-face F 6= F such that H < F < J , and by (1), F /∈ F(if we had F ∈ F , then J would contain two i-faces in F , violating (1)). Therefore, in P ′,
E ≥ J > F > H, and so in particular, E is in the 1-skeleton of H/C in (P ′)∗. Hence,
every face in the 1-skeleton of H/C in P ∗ also occurs in the 1-skeleton of H/C in (P ′)∗,
and we see by similar reasoning that every face in the 1-skeleton of H ′/C in P ∗ also occurs
in the 1-skeleton of H/C in (P ′)∗. Since the 1-skeletons of H ′/C and H/C in P ∗ share
faces (since C is incident to both H and H ′ in P , it contains faces in F , and hence contains
(k− 1)-faces and (k− 2)-faces incident to faces in F , which are incident to both H and H ′)
and digonal contraction does not affect the incidences between (k−1)-faces and (k−2)-faces
for k > i+ 2, we find that the 1-skeleton of H/C in (P ′)∗ is connected, and hence, C/H is
connected in P ′ (and therefore flag-connected).
We will now proceed by showing that P ′ is strongly flag-connected (and therefore
strongly connected). In order to do this, we choose an arbitrary section S′ = B/A of P ′ and
demonstrate that it is flag-connected. Since every face of P ′ corresponds to at least one face
of P , we can examine the corresponding section S = B/A of P . Examine two flags Φ and Ψ
of S′: they correspond to two flags Φ and Ψ of S, so we have a sequence Φ = Φ0, ...,Φr = Ψ
of successively adjacent flags of S taking Φ to Ψ in S. If this sequence does not contain a
flag that passes through any of the faces in F , we can produce a corresponding sequence
of successively adjacent flags in S′, as desired (since all the relevant flags will still exist in
P ′, up to the renaming of the face H ′ as H, if it occurs in any of the flags). Suppose the
sequence contains a flag that passes through a face in F . If the maximum face of P is an
element of F (and hence F = {F}), then we are done, since we then have P ′ = H/F−1,
which we already showed is strongly flag-connected. Suppose that this is not the case: then
let Φj be the first flag containing any member of F in the sequence - call this member F ′.
Then a number of subsequent flags will all contain F ′ until we reach some flag Φk again not
containing F ′ - note that Φk cannot contain any of the faces in F because no two of these
faces are contained in a common (i+ 1)-face, by (1).
We now find a sequence of successively adjacent flags taking Φj−1 to Φk in S′. Any flag
29

of S containing F ′ must also contain H or H ′: Condition (3) with Lemma 3.1.2 tells us
that F ′ has only H and H ′ as corank-1 faces, and of course we cannot have A = F ′ since
A is a face of P ′, whereas F ′ does not occur in P ′. Therefore, Φj−1 and Φk must each
also contain H or H ′, since they are i-adjacent to flags containing F ′. Hence, in S′, the
flags Φj−1 and Φk both contain H (the combination of H and H ′ from P ). Since H/F−1 is
strongly flag-connected in P ′ (as established earlier), we know that H/A is flag-connected
in P ′. Hence, we can move Φj−1 to a flag Φ′ identical to Φj−1 for all faces containing H,
and identical to Φk for all faces contained in H. Since we know that B/H is flag-connected
in P ′ (as established earlier), we can move Φ′ to Φk, since these two flags coincide in all
faces contained in H. Hence, we can move Φj−1 to Φk in S′. This means that we can take
Φ = Φ0 to Φk in S′. Now, we can continue taking the original sequence of successively
adjacent flags in S from Φk onwards to get from Φ to Ψ; if we again pass through a face
in F , we can again find an alternative sequence of subsequently adjacent flags, as we just
did from Φj−1 to Φk. Hence, we can modify the sequence of subsequently adjacent flags
from Φ to Ψ in S to get a sequence of subsequently adjacent flags from Φ to Ψ in S′, and
so S′ is flag-connected. Since S′ is an arbitrary section of P ′, we see that every section of
P ′ is flag-connected, and so P ′ is strongly flag-connected, and therefore strongly connected.
Therefore, since we have demonstrated all four conditions (P1) through (P4) on P ′, we see
that P ′ is a polytope.
In Figure 3.2, we see four polytopes with digons that cannot be contracted. In particular,
the first polytope violates Condition (1) of Theorem 3.1 while satisfying (2) and (3), the
second polytope violates Condition (2) of Theorem 3.1 while satisfying (1) and (3), and
the third polytope violates Condition (3) of Theorem 3.1 while satisfying (1) and (2).
The combinatorial structure of these examples is too tight to allow the contraction of the
specified digons. The fourth polytope violates Condition (4) of Theorem 3.1 while satisfying
the other three conditions. We do not examine Condition (4) on the first three polytopes:
we do not know whether (4) actually implies some of the other conditions, but even if it were
the case that (4) implied another condition, we would want to include all four conditions
in the theorem, since (4) is a condition on P ′ with a complicated corresponding condition
on P which we would like to keep as simple as possible.
The first polytope is a “dihedron over a digon”. This is a polyhedron consisting of two
digonal faces sharing both edges and both vertices of the polyhedron. Both digonal faces are
in F (so i = 2), and they are both contained in the (i+ 1)-face P , violating Condition (1)
30

Figure 3.2: Four non-contractible digons.
31

of Theorem 3.1.
The diagram showing the second polytope does not actually show the polytope itself, but
a related polytope. To get the polytope that we are actually interested in, we increase the
rank of every face of the displayed polytope (which is a polyhedron made up of two triangles
and a square) by 1, and then have two vertices contained in every higher-rank face. The
resulting polytope is then rank-4 and consists of two vertices, four edges (corresponding
to the four vertices of the displayed polytope), two of which are H and H ′, five digons
(corresponding to the five edges of the displayed polytope), one of which is F , and three
polyhedra (corresponding to the triangles and square of the displayed polytope). We see
that the polyhedron corresponding to the square of the displayed polytope contains both H
and H ′ but does not contain F , violating Condition (2) of Theorem 3.1.
The third polytope is a “pyramid over a digon”. The apex of the pyramid, shown on the
left, is contained in two triangles, which are H and H ′. Then F is the polytope itself. We
see that Condition (3) of Theorem 3.1 is violated since, taking R as either of the vertices
of the polyhedron other than the apex, the vertex figure of R is a triangle rather than a
digon.
For the fourth polytope, as with the second, the diagram does not actually show the
polytope itself. Again, to get the polytope P that we are actually interested in, we increase
the rank of every face of the displayed polytope (which is a polyhedron made up of four
triangles, two in the front containing F and two in the back containing F ′) by 1, and
then have two vertices contained in every higher-rank face. The resulting polytope is then
rank-4. Figure 3.3 demonstrates that Condition (4) of Theorem 3.1 is in fact violated by
this polytope, with I = P .
We denote the four facets of P corresponding to the four triangles in the diagram as
follows: I corresponds to the triangle XWF , II to Y ZF , III to XWF ′, and IV to Y ZF ′.
The first two diagrams in Figure 3.3 show the sections P/H and P/H ′. The result of digonal
contraction is shown in the third diagram in Figure 3.3: F and F ′ have been removed, and
the remaining faces and their incidences have been adjusted accordingly. As we can see,
P ′/H is not connected, hence violating (4). If the original polytope was ‘twisted’ in such a
way that the order of the faces in P/H was the same but the faces I and II were swapped in
P/H ′ (so that I contained Z and II contained W ), then P ′/H would be a square, and hence
connected. Hence, we see the complexity of Condition (4) in P : in order to see whether
Condition (4) is satisfied in P , we need to examine the incidences between the faces in F
32

Figure 3.3: An example of Condition (4) breaking for digonal contraction.
33

and the faces in I/H and I/H ′.
However, there exist simple conditions on P which are sufficient for Condition (4) to be
satisfied.
Remark 3.2.1. Suppose that for a polytope P as in Theorem 3.1, we have F = {F} and
for every (i + 2)-face I in P , one of the polygonal sections I/H and I/H ′ is finite. Then
Condition (4) is satisfied.
We see why this is true in Figure 3.4. Here, we note that the (i + 1)-faces A and B
coincide in I/H and in I/H ′, since both faces A and B contain F , which contains H and H ′.
It is possible that x and y coincide, or that z and w coincide, but this does not meaningfully
affect the result. If both polygonal sections I/H and I/H ′ in P are infinite, then we see
that the resulting section I/H in P ′ cannot be connected, since there is no way to get from
A to B. Similarly, we see that the following condition is also sufficient for Condition (4) to
be satisfied:
Remark 3.2.2. Suppose that for a polytope P as in Theroem 3.1, every (i+ 2)-face I in P
incident to both H and H ′ is such that I contains exactly one face from F , and one of the
polygonal sections I/H and I/H ′ is finite. Then Condition (4) is satisfied.
Another important note about Theorem 3.1 is that it extends naturally to the question
of contracting an edge. Suppose P is an n-polytope with two vertices H and H ′ joined by
an edge F , and denote by F the set of all edges containing both H and H ′. Suppose that we
have produced a poset P by combining H and H ′ and removing the faces in F , as in digonal
contraction, although of course F is not a digon but an edge. Then P is a polytope if and
only if the conditions of Theorem 3.1 hold for P (note that Condition (3) holds trivially
since H and H ′ have no corank-2 faces); this follows from the proof of Theorem 3.1. In
particular, if P is a polytope lattice, then the edge F is contractible (i.e., P is a polytope)
if and only if for every facet I in P containing both vertices H and H ′, one of the polygonal
sections I/H and I/H ′ is finite. Note that this is always the case if P is in fact a convex
polytope.
3.3 Reversing Digonal Contraction
A natural question is if, and how, we may perform the opposite operation to digonal con-
traction, which we might call digonal insertion. Whereas digonal contraction replaces a
34

Figure 3.4: Merging two polygons with digonal contraction.
35

digon with an edge, digonal insertion would replace an edge with a digon. To formalize
this, let P ′ be an n-polytope with an (i − 1)-face H (for i ≤ n). We wish to produce a
poset P by replacing H by two copies of it, H and H ′, which are both contained in a set of
new i-faces F . Faces of P ′ other than H and H ′ are copied over to P , and their incidences
between each other are preserved, but we must determine the number of faces in F , their
incidences, and the incidences of the faces H and H ′, with the goal of P being a polytope
so that performing digonal contraction on P produces again P ′.
It is not clear if there is any simple way of deciding how to set the number of faces in
F and the incidences of the faces in F , H, and H ′ so that P is a polytope and performing
digonal contraction on P produces P ′, or moreover if there is any simple condition on P ′
which tells us whether it is even possible to produce such a polytope P . The following
considerations highlight some of the difficulties.
First, we see that the new i-faces in F each should only have two corank-1 faces (i.e.
H and H ′): since our goal is to reverse digonal contraction, the poset P should have the
properties required for digonal contraction, and in particular each face in F can only have
two corank-1 faces, by Lemma 3.1.2 with Condition (3) for digonal contraction. Moreover,
the faces H and H ′ must have identical lower-rank incidences: given any corank-1 face I
of H, (P4) for F/I (for any F ∈ F) tells us that I must be incident to another (i− 1)-face
of P , but we know that only one other (i − 1)-face is incident to F , i.e. H ′, so I is also
a corank-1 face of H ′; we can make a similar argument assuming first that I is instead
a corank-1 face of H ′. Hence, for the new faces we have produced (i.e. H, H ′, and the
faces in F), it is clear how to set their lower-rank incidences. The problem is in setting the
higher-rank incidences so that P is a polytope.
In P ′, we have a set of i-faces containing H, and in P , for each such i-face we need
to decide whether it is incident to H or to H ′ (it cannot be incident to both: any i-face
containing both H and H ′ in P is a member of the set F and is removed in P ′). Clearly,
we cannot make this decision completely arbitrarily: if we view the 1-skeleton of P ′/H as
a graph, we need to assign each vertex to H or to H ′ in P , i.e. to partition the vertices of
the graph into two sets, so that each corresponding subgraph is nonempty and connected.
Then the edges of the graph, corresponding to (i + 1)-faces in P ′ containing H, have
obvious lower-rank incidences in P : if such an edge contains two vertices both assigned to
H, then the corresponding (i+ 1)-face in P must be incident to H; if such an edge contains
two vertices both assigned to H ′, then the corresponding (i+ 1)-face in P must be incident
36

to H ′; and if such an edge contains one vertex assigned to H and one vertex assigned to H ′,
then the corresponding (i+ 1)-face in P must be incident to both H and H ′, and therefore
must be incident to exactly one of the faces in F .
However, this still leaves us, in general, many different ways to assign the vertices of the
graph to H or H ′ in P , and also many ways to decide on how many faces are in F and which
edges of the graph they are incident to. It is not clear if there is any simple condition telling
us which choices give us an actual polytope for P . Hence, it seems as though reversing
digonal contraction is more complicated than performing digonal contraction.
37

Chapter 4
The Helfand Construction
Helfand (2013, Section 2.2) gives us a rank-preserving construction that we can apply to any
(abstract) polytope of rank n ≥ 3 to get another n-polytope. This construction has useful
connections to the digonal contraction and to the (not yet defined) polygonal contraction,
and so we present it here.
4.1 The Global and Local Helfand Constructions
Let P be an n-polytope. For Helfand’s construction, we choose a rank k with 0 ≤ k ≤ n−1
and replace (combinatorially) every k-face F of P with a number of new k-faces, one for
each (k+1)-face containing F , and add an i-face for i > k for every incident pair of a k-face
F of P and an (i + 1)-face G of P . All faces of P with rank other than k are retained,
as well as all incidences between faces with rank other than k. The new k-faces each con-
tain the same proper faces as their corresponding original faces did, and each is contained
in the original (k + 1)-face it corresponds to. Every new i-face for i > k is contained in
its corresponding original (i + 1)-face G, and contains the new faces corresponding to the
original faces above F contained in G. We call this process the global Helfand construction
(the resulting polytope is called [P ]k, the k-bubble of P ).
In Figure 4.1, we have an example of what happens when the global Helfand construction
is applied to the cube. The first figure is the cube itself.
If k = 0, we get the second figure, known as the truncated cube (in general, applying the
Helfand construction with k = 0 to any convex polyhedron produces a convex polyhedron
38

obtained by truncating the vertices of the original polyhedron). Here, we see that each
vertex (i.e. each k-face) is replaced with three new vertices, corresponding to the three
edges of the original cube containing the vertex. Additionally, we have three new edges for
each vertex, corresponding to the three squares of the original cube containing the vertex.
Finally, we have a new triangle for each vertex, corresponding to the incidence between the
vertex and the cube itself.
If k = 1, we get the third figure, in which every edge of the cube is replaced by a digon.
This occurs because every edge is contained in exactly two squares in the cube, and so each
edge of the cube is replaced with two new edges. Additionally, we have a new 2-face for
each edge (the digon), corresponding to the incidence between the edge and the cube itself.
If k = 2, the construction can be applied, but we just get the same cube back.
We produce a local version of this construction, again combinatorially: instead of re-
moving every k-face of P , we only remove one k-face F of P , and replace it with a collection
of new k-faces, one for each (k+ 1)-face of P containing F . We also add an i-face for i > k
for every incident pair (F,G) of P with G an (i+ 1)-face of P . All faces other than F are
retained, as are all incidences between faces other than F . The new k-faces each contain the
same proper faces as F , and each is contained in the (k+1)-face containing F from which it
was derived. Every new i-face for i > k is contained in its corresponding original (i+1)-face
G, and contains the new faces corresponding to the original faces above F contained in G.
We call this operation the local Helfand construction (at level k), or for short, the Helfand
construction.
It is easy to see the effect of the local Helfand construction on the cube: looking at
Figure 4.1, the case k = 0 would have us truncate a single vertex of the cube instead of
every vertex, and the case k = 1 would have us replacing a single edge by a digon instead
of every edge. Note that the global Helfand construction is the same as applying the local
Helfand construction in turn to every (original) k-face of a polytope.
Theorem 4.1. The (local) Helfand construction always produces a polytope.
Proof. Say we apply the local Helfand construction to a k-face F of an n-polytope P to
produce an object P ′. In P ′, we classify the faces as ‘old’ or ‘new’ depending on whether
those faces exist in P or were produced by the construction, respectively. Each new i-face
corresponds to an old (i+ 1)-face containing F ; for each old (i+ 1)-face G, we call the new
i-face G. We now check whether P ′ satisfies each of the four defining conditions for being
a polytope.
39

Figure 4.1: Two different applications of the global Helfand construction to the 3-cube.
40

We first see that (P1) and (P2) hold in P ′: each new i-face G is incident to the (i+ 1)-
face G above, and to at least one (i−1)-face (for i > k, the (i−1)-faces of G are incident to
the new faces corresponding to the corank-1 faces of G above F ; for i = k, the (i− 1)-faces
of G are incident to the corank-1 faces of F in P ). Hence, we can see that the ranks still
behave as expected and the conditions (P1) and (P2) hold.
We now examine (P4). Consider two faces B > A in P ′ with rk(B) = rk(A)+2. Several
cases need to be considered.
First suppose A and B are both old faces. Then B/A in P ′ is identical to B/A in P
unless rk(B) = k + 1 and F lies in B/A: in this case, B > F > A in P and we see that
B/A in P ′ has the same structure as in P , but F is replaced by B. Hence, (P4) holds in
this case.
Now suppose B is new, B = C (say), and A is old. The only situation in which a new
i-face contains an old (i− 1)-face occurs when i = k, so we must have either rk(B) = k or
rk(B) = k + 1. In the first case, B/A is identical in P ′ to F/A in P (except for the name
of the k-face); in the second case, we know that in P we have exactly two faces H and H ′
between C and F ; then we have exactly two faces H and H ′ between C = B and A in P ′
(since F < B in P ). Hence, (P4) also holds in this case.
Now suppose B is old and A = D is new. We then see that we must have exactly the
faces B and D between B and A in P ′, so (P4) holds in this case.
Finally, if B = C and A = D are both new, then (P4) must hold because the section
B/A is identical in structure to the section C/D. Hence, in all cases, (P4) holds. It remains
to show (P3).
We consider a section B/A in P ′ of rank at least 2, and wish to show that it is connected;
it suffices to show that we can move from any proper face G to any proper face H.
Suppose G and H are both old faces in B/A. If B is a new face, then G and H must
both be contained in F in P (since the only old faces contained in new faces of P ′ are faces
that were contained in F in P ): in this case, we can take the same sequence of proper
faces to get from G to H in B/A in P ′ as we would take in F/A in P . If B is an old face
and A = C is a new face, all old faces in B/A = B/C are also in B/C since C is the only
old face having C as a corank-1 face. Then we can take the same sequence of (old) faces
as in B/C in P to get from G to H in B/A. If A and B are both old, either there are
no new faces in B/A (in which case it is identical to B/A in P and is hence connected) or
we have B > F > A in P : in this case, we take the sequence of (old) faces from G to H
41

in B/A in P , and if it passes through F , we need to instead use the new k-faces that have
replaced F .
Denote by I the face directly before F in the sequence in P , and denote by J the face
directly after F in the sequence. If both I and J are (k − 1)-faces, then we can easily
get from I to J in B/A in P ′ by using any arbitrary k-face that replaced F instead of F
itself, which has been removed: every new k-face in P ′ has identical lower-rank incidences
to F . If one of the faces I or J is a (k + 1)-face and the other is a (k − 1)-face - say I is a
(k+ 1)-face and J is a (k− 1)-face - then we simply replace F with I in the sequence in P ′,
since I > I > J in P ′. If both I and J are (k + 1)-faces, then in B/A in P ′ we can move
from I to I and from J to J , so it suffices to move from I to J .
If rk(A) < k − 1, then we can do this by moving to any (k − 1)-face of I, since I
and J have identical lower-rank incidences. Otherwise, we must have rk(A) = k − 1. If
rk(B) > k + 2, then B/F has rank at least 2 in P , and so we have a sequence of proper
faces taking I to J in B/F in P : replacing each face in the sequence by its corresponding
new face in P ′, we have a sequence of proper faces taking I to J in B/A in P ′, as desired.
Otherwise, rk(B) ≤ k + 2: if rk(B) < k + 2 then B/A is trivially connected, so consider
rk(B) = k + 2, so B/A is a 2-section. Then in B/A in P ′, we can move from I to J by
passing through B: since the (k + 2)-face B is incident to the (k + 1)-faces I and J in P ,
the (k+ 1)-face B is incident to the k-faces I and J in P ′. Hence, in all cases, we can move
from I to J in B/A in P , so we are done. Thus, in all cases, we can move from any old face
to any old face in B/A in P ′.
Now suppose G = C and H = D are both new faces. We first find an appropriate
corresponding section in P to B/A in P ′: if A and/or B are new faces, we take their
corresponding old faces in P (if either face is old, we use it in P ′). Then in this section
in P , the faces C and D are proper and we have a sequence of proper faces moving from C
to D. Then in B/A in P ′, we can take a similar sequence from G to H, replacing every old
face with its corresponding new face if it corresponds to a new face. Hence, in B/A in P ′
we can move from any new face G to any new face H.
It remains to show that in B/A in P ′ we can move from some old face G to some
new face H = D. Suppose we cannot: then the previous discussion implies that the set of
proper faces of B/A is composed of exactly two connected components, one entirely of old
faces and one entirely of new faces. This means that for every proper new face in B/A, its
corresponding old face is not in B/A.
42

Suppose A = E is a new face. Let rk(A) = j; then there must be a rank-(j + 1) old
face in B/A (otherwise any flag containing a proper old face in B/A would also contain
a proper new (j + 1)-face, thus giving one connected component), and this face can only
be E. Then take a proper (j + 2)-face K > E in B/A and examine the section K/A; by
(P4), we must have a second (j + 1)-face in this section. This must be a new face (the only
old (j + 1)-face containing A is E), and hence can only be K; hence, we have two incident
proper faces in B/A, one new, K, and one old, K, giving us a contradiction.
Then suppose A is an old face. Then we must have rk(A) = k− 1, since this is the only
rank j in P ′ with old j-faces contained in new (j + 1)-faces. Suppose B is also an old face.
Then let L be a rank-(k + 1) face of B/A in P containing F : then L must also be in B/A
in P ′, as well as L, so we again have two incident proper faces, one new and one old, giving
us a contradiction. Now suppose B is a new face. Let rk(B) = i. Since B/A contains old
proper faces, it contains old faces of rank at least k. Every face containing an old face of
rank at least k must also be old, so B must in face be an old face, and hence we again have
a contradiction.
Hence, in all cases, we can move from some old proper face in B/A to some new proper
face. This means that, with the previous results, we can move from any proper face in B/A
to any proper face, so all sections B/A in P ′ are connected, so we have (P3). Therefore, P ′
is a polytope.
4.2 Connections to Digonal Contraction
We now note that the (local) Helfand construction, when applied to a k-face F of an n-
polytope P for 1 ≤ k ≤ n − 2, produces digons (as rank-2 sections) with greatest faces of
rank k + 1. We see this illustrated in the Hasse diagrams in Figure 4.2. A digon I/G is
produced for every incident pair of faces (G, I) of P such that G is a corank-2 face of F and
F is a corank-2 face of I. This follows from the fact that there are two (k + 1)-faces J and
J ′ between F and I. After the construction, we get a new k-face J corresponding to J and
a new k-face J ′ corresponding to J ′. Both of these faces contain the (k− 2)-face G and the
two (k − 1)-faces between F and G in the original polytope, and both are contained in the
new (k + 1)-face I corresponding to I. Hence, we get a digon I/G in P . We can now ask
when a single such digon can be removed via digon contraction.
Theorem 4.2. Let P be an n-polytope with a k-face F , let 1 ≤ k ≤ n − 2, and let P
43

Figure 4.2: Producing a digon via the Helfand construction.
be the n-polytope obtained from P by applying the Helfand construction at F . Let G be a
(k − 2)-face of P and I be a (k + 2)-face of P with G < F < I. Let J and J ′ be the two
proper (k+1)-faces of the section I/F in P . Let I be the set of (k+2)-faces in P containing
both J and J ′ (so I ∈ I). Then the digon I/G in P is contractible (in the sense that the
resulting structure is an n-polytope) if and only if the following conditions hold in P :
(1) No two faces in I are contained in a common (k + 3)-face.
(2) Every face containing both J and J ′ also contains a face in I.
(3) Denote by P ′ the poset obtained by combining the faces J and J ′ in P as in digonal
contraction, removing every face in I, and leaving all other faces and incidences of P
unchanged. Then for every (k+ 4)-face L containing both J and J ′ in P , the rank-2 section
L/J is connected in P ′.
In Figure 4.3, we see an example of such a process: we start with the cubic tessellation
of 3-space (this is a 4-polytope; in the diagram, only the neighborhood of one edge is shown
- the edge is the intersection of four cubes), apply the Helfand construction to an edge
(replacing the edge with a 3-polytope consisting of four digons sharing the two vertices and
joined edge-to-edge to form the tessellation {2, 4} of the 2-sphere), then contract one of
the digons in the result (the new 3-polytope now has three digons sharing the two vertices
joined edge-to-edge to form the tessellation {2, 3} of the sphere).
Proof. We first examine the incidence structure of P . An old face C in P/F (a face that
44

Figure 4.3: Producing and contracting digons with the Helfand construction.
45

exists in P as well) contains exactly (1) the old faces in P that C contains, and (2) the
new faces (i.e. those newly-introduced in P , each corresponding to an old face in P/F )
corresponding to either C itself or a face in P/F contained in C. A new face C = D contains
exactly the new faces corresponding to the faces in P/F contained in D, as well as all faces
properly contained in F in P .
We note that in P , the digon we are considering contracting is I/G, which means that
the faces J and J ′ correspond to the faces H and H ′ in the digonal contraction theorem,
Theorem 3.1, (since they are the edges of the digon) and the set I := {I ′|I ′ ∈ I} corresponds
to the set F in the digonal contraction theorem (since they are exactly the faces having J
and J ′ as common corank-1 faces).
We first show that if any of the conditions for the present theorem do not hold, then
the digon I/G is not contractible in P .
First, suppose that (1) of the present theorem does not hold, i.e. some (k + 2)-faces
I1, I2 ∈ I are contained in a common (k + 3)-face C in P . Then in P , we have I1, I2 ≤ C,
so we violate condition (1) of Theorem 3.1 (with i = k + 1). Hence, condition (1) of the
present theorem is necessary for contractibility.
Next, suppose that (2) of the present theorem does not hold, i.e. we have some face
K in P containing J and J ′ that does not contain any face in I. Then in P , we have
J , J ′ ≤ K, but none of the faces in I are contained in K. Hence, we violate condition (2)
of Theorem 3.1, so condition (2) of the present theorem is necessary for contractibility.
Finally, suppose that (3) of the present theorem does not hold, i.e. we have some (k+4)-
face L in P containing both J and J ′, with the section L/J disconnected in P ′. Denote
by P ′ the poset obtained by contracting the digon I/G in P . Condition (4) for Theorem 3.1
tells us that the 2-section L/J of P ′ must be connected in order for the digon I/G in P to
be contractible in P . However, the 2-section L/J of P ′ corresponds to the 2-section L/J
of P ′, by definition of the Helfand construction: every face of L/J corresponds to a face of
L/J , and the incidence structure is the same. Therefore, L/J is disconnected in P ′, and so
the digon I/G in P is not contractible in P . Hence, condition (3) of the present theorem is
necessary for contractibility.
Now suppose that conditions (1) through (3) of the present theorem hold. We show
that then conditions (1) through (4) of Theorem 3.1 must hold in P , so the sufficiency (of
(1) through (3)) follows from Theorem 3.1.
To prove (1) of Theorem 3.1 (with i = k + 1) for P , observe that each I ′ ∈ I is a
46

corank-1 face of only one old face, i.e. I ′, and I ′ cannot contain any of the other faces in Isince each old face contains only one new corank-1 face. Hence, no two of the (k + 1)-faces
in I can be contained in a common old (k + 2)-face. Furthermore, no two faces I1, I2 in Ican be contained in a common new (k+ 2)-face C = D of P : if this were the case, then we
would have D > I1, I2 in P , violating (1) of the present theorem. Hence, condition (1) of
Theorem 3.1 must hold for P .
To prove (2) of Theorem 3.1 for P , suppose some face C in P contains J and J ′. First,
suppose C is an old face: then it must contain J and J ′ (every face contained in C is either
an old face or a new face corresponding to an old face above F contained in C). Then
by (2) of the present theorem, C contains some I ′ in I, and therefore it contains I ′ in I,
so (2) of Theorem 3.1 holds in this case. Second, suppose C = D is a new face: then D
must contain J and J ′, so by the same reasoning as before, D contains a face from I, and
therefore D = C does as well. Hence, in both cases, (2) of Theorem 3.1 holds for P .
To prove (3) of Theorem 3.1 for P , let R be a common corank-2 face of J and J ′ in P .
We note that J and J ′ have the same set of incident faces of lower rank (i.e. the set of faces
of F in P , by definition of the Helfand construction). Then the two faces between J and R
are identical to the two faces between J ′ and R, so I ′/R is a digon for every I ′ in I. Hence,
(3) of Theorem 3.1 holds for P .
To prove (4) of Theorem 3.1 for P , let E be a (k + 4)-face of P incident to both J
and J ′. We examine the rank-2 section E/J in P ′.
First, suppose that E is a new face in P , so E = L for a (k+5)-face L in P . Then by (3)
of the present theorem, the 2-section L/J is connected in P ′, and hence the corresponding
rank-2 section L/J = E/J is connected in P ′.
Now suppose that E is an old face in P . Then consider the 2-section E/J of P . Clearly,
this rank-2 section contains E as an edge. Also, since E is an old face containing J , the
2-section E/J must contain J as a vertex. Furthermore, since E is incident to both J
and J ′, it is incident to both J and J ′, and therefore to some I ′ in I; hence, E/J must
contain I ′ as an edge and I ′ as a vertex. Finally, by (P4) on the section E/J in P , we see
that E/J must contain an additional edge K (this must be an old face since it lies in E/J)
and a corresponding vertex K. Examining the incidence structure of these three vertices
and three edges, we see that E/J is in fact a triangle in P , as shown in Figure 4.4; similarly,
as shown in the same figure, E/J ′ is a triange in P as well (here, we have an analogous
face K ′ to K, from (P4) on the section E/J ′). Examining the effect of digonal contraction
47

Figure 4.4: Merging two triangles into a square with digonal contraction.
on these triangles, we see, again in Figure 4.4, that E/J is a square in P ′, and is hence
connected.
Hence, in both cases, the rank-2 section E/J in P ′ is connected in P ′, satisfying (4) of
Theorem 3.1 for P .
Thus, conditions (1) through (4) of Theorem 3.1 must hold for P , and so the digon I/G
of P is contractible.
Corollary 4.2.1. Suppose P is a polytope lattice and we apply the (local) Helfand con-
struction to a k-face F of P to obtain a polytope P as in the previous theorem. Let I/G
be an arbitrary digon of P obtained as a result of this construction, with G < F < I in P ,
rk(I) = k + 2, and rk(G) = k − 2. Denote by J and J ′ the two proper (k + 1)-faces of the
section I/F in P . Then I/G is contractible in P if and only if for every (k+4)-face L of P
containing both J and J ′, one of the polygonal sections L/J and L/J ′ in P is finite.
48

Proof. We will proceed with this proof with only the assumption that P is a polytope
lattice. We first note that we must have I = {I}, since I is the supremum of J and J ′ in P .
Hence condition (1) of the previous theorem must hold trivially. Similarly, condition (2) of
the previous theorem must hold, again since I is the supremum of J and J ′ in P .
We now consider condition (3) of the previous theorem. Denote by P ′ the poset obtained
by combining the faces J and J ′ in P , removing I, and leaving all other faces and incidences
of P unchanged. Let L be a (k + 4)-face of P containing both J and J ′. We see the effect
of contracting J and J ′ on the polygons L/J and L/J ′ in Figure 4.5: here, A and B are the
(k + 3)-faces containing I in L/J (A and B must also contain I in L/J ′ since I contains
both J and J ′). Since I = {I}, the rank-2 section L/J in P ′ is connected if and only if
at least one of the paths shown from x to y or from z to w is finite; hence, the digon I/G
is contractible in P if and only if one of the polygonal sections L/J and L/J ′ is finite for
every such choice of L.
Note 4.2.2. Suppose we apply the (local or global) Helfand construction with 1 ≤ k ≤ n−2
to an n-polytope P , and then contract one of the new digons of P to obtain a polytope P ′.
We can then contract another of the new digons of P in P ′, as long as it was unaffected by
our previous contraction (i.e. neither of the new faces H and H ′ of this second digon is the
merged face of the first digon), by the same reasoning. We can then continue contracting
digons produced by the Helfand construction, again under the assumption that all contracted
digons are unaffected by previous contractions. In general, however, we cannot repeat this
process to get the original polytope P back: for instance, in Figure 4.3, after contracting
one digon (the digon in front), there is only one other digon that can be chosen that was
not affected by the first contraction (the digon in back); after contracting both, we cannot
contract further, since Condition (1) of Theorem 3.1 is violated.
49

Figure 4.5: Merging two polygons with digonal contraction, in connection with the Helfandconstruction.
50

Chapter 5
Polygonal Contraction
In this chapter, we introduce a second new construction on abstract polytopes called polyg-
onal contraction, letting us combine non-adjacent vertices of polygons under certain condi-
tions. These polygons can be 2-faces of the polytope or sections of rank 2.
5.1 Defining Polygonal Contraction
We will first define what we mean by polygonal contraction. As we will see, it is not
immediately obvious exactly how this operation should be defined.
Note 5.1.1. Let P be an n-polytope with a 2-section D = F/G at level rk(F ) = i < n (so
rk(G) = i− 3), and let v1 and v2 be two vertices of D (faces in D of rank i− 2 in P ) which
are non-adjacent in D. See Figure 5.1 for an illustration. We wish to produce a poset P ′ by
merging v1 and v2, splitting F into two new faces F1 and F2, and removing every (i−1)-face
of P containing both v1 and v2 (the set of all such faces in P is denoted E). We carry over
all incidences between faces other than v1, v2, F , and those from E. The incidences of the
merged vertex v1 in P ′ carry over from P (v1 in P ′ inherits all incidences of v1 and v2
in P ); what is not immediately clear is how the incidences of F1 and F2 in P ′ should be
assigned in order for P ′ to be a polytope. In particular, we wish to copy every incidence
F < H in P to get new incidences F1 < H and F2 < H in P ′; however, we then also
need to determine how to assign incidences H < F in P (for rk(H) = i− 1) to incidences
H < F1 and/or incidences H < F2 in P ′.
51

Figure 5.1: Polygonal contraction on a hexagon.
In Figure 5.1, we have a (local) example of what should occur during polygonal con-
traction. On the left side, in P , we see a hexagon (this hexagon is not P itself but some
polygonal section in P at some level i), with distinguished vertices v1 and v2 shown. On
the right side, in P ′, the vertices v1 and v2 have been merged, and F has been split. The
labeling of F1 versus F2 is arbitrary, but it is clear that F should split into two triangles,
and it is clear which incidences of F in P should go to which triangle (note: all incidences
of F in P to faces of greater rank are copied to both F1 and F2).
Hence, it is clear how we should assign the incidences H < F with rk(H) = i − 1 to
incidences in P ′: if H lies in F/G, then we have a natural incidence between H and exactly
one of the two faces F1 or F2 in P ′. However, we still need to determine how to assign
incidences H < F (with rk(H) = i− 1) to incidences in P ′ if H does not lie in F/G, i.e. H
is not incident to G.
Let H, with H < F , be an (i− 1)-face of P outside of D, and B > F be an (i+ 1)-face
of P (note that i < n). Then by (P4), we have another face besides F between H and
B in P . In P ′, in order to preserve (P4) for B/H, exactly one of the new faces F1 or F2
needs to be incident to H. In fact, upon further investigation, we can see that there is at
most one way to assign each of the corank-1 faces H of F in P to be incident to (exactly
one of) the faces F1 or F2 in P ′ in order to produce a polytope. We present the following
52

proposition, allowing us to define polygonal contraction:
Proposition 5.1.2. Let P be a polytope with a polygonal section F/G. Let rk(F ) = i < n
and let v1 and v2 be non-adjacent vertices of F/G. Let G denote the edge graph of the dual
polytope of the i-polytope F/F−1 (so v1 and v2 are edges of G). We consider creating a new
poset P ′ by contracting F/G as described above, and arbitrarily assigning each corank-1 face
of F (the vertices of G) to exactly one of the faces F1 or F2 in P ′. If P ′ is a polytope, then
the subset of edges {v1, v2} of G is an edge cut of G and the incidences of the corank-1 faces
of F are assigned to F1 or F2 according to the edge cut (i.e., the edge cut splits G into
several connected components; every vertex of G in a given connected component must be
assigned to the same face F1 or F2 in P ′). We note that this condition only depends on the
structure of F/F−1 in P .
Proof. Let P ′ be a polytope. In order to prove this statement, we first prove the following:
for any edge v 6= v1, v2 of G (note that v, viewed as a face of P , has rank i − 2), both
vertices E1 and E2 of G contained in v (which, viewed as faces of P , have rank i− 1) must
be assigned to the same face F1 or F2 in P ′ since P ′ is a polytope. Suppose they are not
assigned to the same face, say E1 < F1 in P ′ and E2 < F2 in P ′. In P , the section F/v has
exactly two proper faces (by (P4)), namely E1 and E2. However, in P ′, the sections F1/v
and F2/v then each have exactly one proper face, namely E1 and E2 respectively. Hence,
(P4) fails in P ′, and so P ′ would not be a polytope. Therefore, each edge v 6= v1, v2 of Ghas both of its vertices in G assigned to the same face F1 or F2 in P ′.
Suppose that {v1, v2} is not an edge cut of G. We know that the two vertices of v1 in Gare naturally assigned to different faces F1 and F2 of P ′ (as discussed above). Note that G is
connected in P by Lemma 2.3.1. Since {v1, v2} is not an edge cut of G, the graph obtained
by removing these two edges from G is still connected, and so we have a path in G from
one vertex of v1 to the other using neither v1 nor v2 as an edge. By the above conditions,
each vertex in the path must be assigned to the same face F1 or F2; however, we already
saw that the first and last vertices of the path are assigned to different faces, which gives a
contradiction. Hence, {v1, v2} must be an edge cut of G.
Moreover, since {v1, v2} is an edge cut of G and every edge v 6= v1, v2 of G has both of
its vertices assigned to the same face F1 or F2 in P ′, we similarly see that each connected
component in G − {v1, v2} must have all of its vertices assigned to the same face F1 or F2:
if not, we have a path between two vertices in G − {v1, v2} assigned to different faces F1,
53

F2, and so again we get a contradiction, since every vertex in the path must be assigned to
the same face F1 or F2. Thus the vertices in a connected component of G − {v1, v2} all are
assigned to the same face F1 or F2 in P .
Note 5.1.3. Suppose that F/G is not an apeirogon. Then the vertices and edges of Gcorresponding to the proper faces of F/G form a cycle, and so by Corollary 2.4.5 applied
to the subgraph of G determined by F/G, the graph G − {v1, v2} has exactly two connected
components. However, if F/G is an apeirogon, then F/G does not correspond to a cycle
in G, and so the graph G−{v1, v2} has either two or three connected components (regardless,
Proposition 5.1.2 holds).
Note 5.1.4. Proposition 5.1.2 finally allows us to define polygonal contraction. If the
necessary conditions of Proposition 5.1.2 for P ′ to be a polytope are satisfied, then there is
exactly one way to assign (i − 1)-faces of P ′ (incident to F in P ) to F1 or F2 that could
result in P ′ being a polytope (up to renaming F1 and F2). This is because every connected
component of G − {v1, v2} contains at least one of the vertices of v1 or v2. These vertices
correspond to the proper faces of F/v1 and F/v2 in P , for which the assignments to F1
or F2 in P ′ are known - hence, their assignments give us the assignments of all the other
(i− 1)-faces contained in F .
Figure 5.3 shows us a graph G for which the conditions in Proposition 5.1.2 are satisfied
and a graph G for which they fail.
The first graph of Figure 5.3 corresponds to the polyhedron shown in Figure 5.2. This
figure shows a polyhedron obtained by the following process: First, two vertices (the top
and bottom ones in the figure) are given four edges between them, creating a polyhedron
with four digons tessellating the 2-sphere (the edge in grey is visualized as being in the
back). Then, one of the edges is split by adding a square as shown in the figure; call this
square A. This polyhedron then has six vertices (the top vertex is G), nine edges (the left
and right edges are v1 and v2), and five 2-faces (two digons in the back, the square in the
front, and two pentagons next to the square). We then take this polyhedron and produce
a prism over it, which is the entire 4-polytope P we are interested in. For F we take the
base of P , that is the polyhedron over which P is the prism.
We then see the edge graph G of the polyhedron dual to F in the first example of
Figure 5.3. The five vertices of the graph correspond to the 2-faces contained in F , and the
nine edges correspond to the edges contained in F . In this graph, v1 and v2 are the left
54

Figure 5.2: A polytope nontrivially satisfying the conditions in Prop. 5.1.2.
and right edges of the graph, and the square consisting of the four edges drawn as straight
lines represents the proper faces of F/G. The inner vertex of the graph corresponds to the
square A. We then get a natural assignment of faces to F1 or F2 in P ′: the red part of the
graph is assigned to F1 (in Figure 5.2, this is the part of F facing us) and the green part of
the graph is assigned to F2 (in Figure 5.2, this is the part of F facing away from us).
The second graph G is the dual of the octahedral base facet F in a pyramid P over an
octahedron, and hence is the edge graph of a 3-cube. Again, P has rank 4. The standard
octahedron in R3 has each vertex at a point ±ei (1 ≤ i ≤ 3). Then the vertices of an abstract
octahedron can be labeled e1, e1, e2, e2, e3, e3; the edges can be labeled e1e2, e1e2, ..., e2e3;
and the 2-faces can be labeled e1e2e3, ..., e1e2e3. Then the polygon being considered for
contraction (in P ) in this example is F/G where F is the octahedron and G is the vertex
e1; we set v1 = e1e2 and v2 = e1e2. The vertices of the graph G correspond to the 2-faces
contained in F , i.e. triangles in the octahedron, and the edges of the graph correspond to
the edges in the octahedron. Again, v1 and v2 are the left and right edges of the graph;
the square consisting of the four vertices whose label includes e1 (rather than e1) represents
the proper faces of F/G. Here, we see that there is no way to assign faces to F1 or F2 to
produce a polytope P ′, according to Proposition 5.1.2, since the removal of v1 and v2 does
not disconnect the edge graph.
55

Figure 5.3: Edge graphs satisfying and violating the conditions in Prop. 5.1.2.
56

5.2 The Polygonal Contraction Theorem
Now that we have defined polygonal contraction, we categorize when the contracted poset
is in fact a polytope. To help do so, we present the following lemma, which is a consequence
of Proposition 5.1.2.
Lemma 5.2.1. Let P be an n-polytope with a polygon F/G at rank i < n as in Propo-
sition 5.1.2 with distinguished vertices v1 and v2. Suppose that the condition in Proposi-
tion 5.1.2 holds, i.e. the set {v1, v2} is an edge cut of the edge graph G the dual polytope
of F/F−1, and we define the poset P ′ as the result of contracting F/G via v1 and v2 as
described in Proposition 5.1.2.
Let E1 be the set of corank-1 faces of F in P which are incident to F1 in P ′, and let E2be the set of corank-1 faces of F in P which are incident to F2 in P ′. Then for every face
K < F with K incident to neither v1 nor v2, each facet of F/K lies in of E1 or each facet
lies in E2 (note that each facet of F/K must lie in E1⋃E2 since every corank-1 face of F
lies in exactly one of these two sets).
Proof. The proof is by downward induction of the rank of K. Clearly the condition holds
if rk(K) = i− 1 since then K is a corank-1 face of F and F/K has rank 0 (with K the only
facet). The condition must also hold if rk(K) = i − 2: such faces K correspond to edges
of G, and from the proof of Proposition 5.1.2 we know that every edge of G other than v1
and v2 has both of its vertices assigned to the same face F1 or F2.
Now suppose that rk(K) < i − 2. W.L.O.G. suppose F/K has a facet that belongs to
E1 (as opposed to E2). Assuming that our statement holds for faces of rank i− 2, then by
(P4) we know that every (i − 2)-face of F/K contained in an (i − 1)-face in E1 must be
contained in another (i− 1)-face in E1. Then by Lemma 3.1.1, all facets of F/K are in E1,so the statement holds for rk(K) < i− 2 as well.
Hence, the statement holds for faces K of any rank.
Theorem 5.1 (Polygonal Contraction Theorem). Let P be an n-polytope with a polygon
2-section D at level i < n whose i-face is called F and whose (i − 3)-face is called G, and
let v1 and v2 be two non-adjacent vertices of D (faces of rank i − 2 in P ). Let G denote
the edge graph of the dual polytope (F/F−1)∗ of the i-polytope F/F−1. Suppose we produce
a poset P ′ by contracting D, i.e. merging v1 and v2, splitting F into two new faces F1 and
F2, and removing (if need be) every (i − 1)-face of P containing both v1 and v2 (the set
57

of all such faces in P is denoted E). Then P ′ is a polytope (of rank n) if and only if the
following conditions hold in P :
(0) The set {v1, v2} is an edge cut of G (and the incidences of faces to F1 or F2 in P ′ are
assigned according to this edge cut). (Note that this condition is numbered (0) since, as
discussed earlier, it is needed to define polygonal contraction in the first place.)
(1) No two faces in E are contained in a common i-face of P .
(2) For every common corank-2 face H of v1 and v2, the proper faces of v1/H are the same
as the proper faces of v2/H.
(3) For every (i+ 1)-face I of P containing v1 and v2, the rank-2 section I/v1 is connected
in P ′.
(4) For every face J of P containing both v1 and v2, we have J ≥ F or J ≥ E for some E
in E.
Note 5.2.2. We will see later when Condition (3) for P ′ does or does not hold; Condi-
tion (3) could be described in terms of P , but the corresponding condition on P is somewhat
complicated to state. However, there are simple conditions on P which are sufficient for
Condition (3) to hold.
Proof. In the first part of this proof, we will show that for P ′ to be a polytope, Conditions
(0) through (4) must hold. We show this by proving first that P ′ is not a polytope if (0)
does not hold, then that P ′ is not a polytope if (0) holds but (1) does not hold, then that
P ′ is not a polytope if (0) and (1) hold but (2) does not hold, and so on. In the second part
of the proof, we will show that the conditions are sufficient for P ′ to be a polytope, i.e. if
all of the conditions hold then P ′ is a polytope.
First, we know by Proposition 5.1.2 that Condition (0) is necessary for P ′ to be a
polytope.
Next, assume that (0) holds but (1) does not hold, i.e. we have some i-face K in P
containing two (i−1)-faces E1 and E2 from E . Then K 6= F . Suppose K has all its corank-1
faces belonging to E : then K has no corank-1 faces in P ′ (since all of the faces in E are
removed), and so P ′ is not a polytope. Suppose otherwise, so K has a corank-1 face L
outside of E . Examine the section K/F−1 in P ′. Suppose K/F−1 contains the merged face
v1. Then in P , we have more than two faces between K and v1: we have E1, E2, and L, so
(P4) does not hold in P , which is a contradiction. Hence, K/F−1 does not contain v1 in P ′.
This means that K/F−1 in P ′ is a subset of K/F−1 in P , but with some faces removed.
58

Therefore, as we discussed in the proof of Theorem 3.1 on digonal contraction, K/F−1 is
not strongly connected, and so P ′ is not a polytope. Hence, (1) is necessary for P ′ to be a
polytope.
Next, assume that (0) and (1) hold but (2) does not hold, i.e. we have some common
corank-2 face H of v1 and v2 such that the proper faces of v1/H are not both the same
as the proper faces of v2/H. We then see that in P ′, the section v1/H has more than two
proper faces (since it includes all proper faces from v1/H and v2/H in P ), violating (P4).
Hence, (2) is necessary for P ′ to be a polytope. Note that by Lemma 3.1.2 (applied to the
faces in E , and with i replaced by i− 1), Condition (2) implies that every face of E has only
v1 and v2 as corank-1 faces.
Next, assume that (0) through (2) hold, but (3) does not hold. Clearly (3) is necessary
for (P3), so if (3) does not hold then P ′ is not a polytope.
Next, assume that (0) through (3) hold, but (4) does not hold, i.e. we have some face
J > v1, v2 of P not containing F nor any of the faces in E . We note that J cannot be of
rank i− 1 since this would mean J is among the faces in E . Suppose J is of rank i. Then
J cannot be F . If J/v1 and J/v2 have any proper faces in common, those faces must lie
in E , meaning J does not violate (4). Then suppose J/v1 and J/v2 have no proper faces in
common: in this case, J/v1 in P ′ has all four of these faces, violating (P4), and so P ′ is not
a polytope. Now suppose rk(J) > i. Examine the proper faces of J/v1 in P : if any of these
faces contains v2, take any such face with minimal rank and replace J by it (again, if the
new face has rank i, we already see that P ′ is not a polytope). Thus, we can assume that
J/v1 in P has no proper faces containing v2, and therefore J/v2 in P also has no proper
faces containing v1. Let A be a proper face of J/v1 in P and let B be a proper face of J/v2
in P : note that neither A nor B is F nor any of the faces in E , and so J/v1 in P ′ contains
both A and B. However, there cannot be any sequence of proper successively incident faces
in J/v1 in P ′ taking A to B: if there was such a sequence, it would start with A, a face
which contains v1 but not v2 in P , and end with B, a face which contains v2 but not v1
in P ; at some point, the sequence would need to pass through a face containing both v1
and v2 in P (since in P every face in the sequence would be in J/v1 or J/v2), but no such
face exists. Hence, the section J/v1 is not connected in P ′, and so P ′ is not a polytope.
Therefore, (4) is necessary for P ′ to be a polytope.
We have shown that Conditions (0) through (4) are necessary for P ′ to be a polytope.
We will now show sufficiency: if Conditions (0) through (4) hold, then P ′ is a polytope. We
59

check the four defining conditions of a polytope on P ′ given our conditions.
(P1): We easily find that there is still exactly one greatest face and one least face (and
they are the same faces as before).
(P2): We also easily find that P ′ is a ranked poset with rank n.
We will examine (P4) next and (P3) at the end of the proof.
(P4): Consider a 1-section B/A of P ′. We will check (P4) on B/A for various choices
of rk(A).
If rk(A) ≥ i, then this section is identical in structure to the corresponding section in P ,
so (P4) holds in this case. This is still true if A = F1 or A = F2 since the faces F1 and F2
each have the same higher-degree incidences in P ′ as F does in P .
Now suppose rk(A) = i − 1. If we do not have A < F1 or A < F2 in P ′, then we do
not have A < F in P (since the new faces F1 and F2 in P ′ only contain (i − 1)-faces that
F contains in P ), so B/A in P ′ is identical to B/A in P , so (P4) holds. If A < F1 (say),
then we note that we do not have A < F2 (since F1 and F2 share no (i − 1)-faces). Then
we have A < F < B in P . By (P4) in P , we have exactly one face F ′ 6= F in P such that
A < F ′ < B. Then in P ′, we must have A < F ′ < B (since these incidences are not affected
by the construction), so B/A in P has at least two proper faces, F1 and F ′. Suppose it has
a third proper face K, i.e. A < K < B in P ′ with K 6= F1, K 6= F ′. Then in P , we must
have A < K < B with K 6= F , K 6= F ′, so (P4) is violated in P , giving us a contradiction.
Hence, B/A in P ′ must have exactly two proper faces, so (P4) is satisfied. We can make a
similar argument if A < F2, so if rk(A) = i− 1 then we always have (P4) for B/A.
Now suppose rk(A) = i− 2.
If in P , neither A nor B are in D, then clearly B/A in P ′ is identical to B/A in P , so
(P4) holds in this case.
If in P , the face A is in D but B is not, then A is a vertex of F1/G (say) in P ′. If A
is not the merged vertex, then clearly B/A is the same in P ′ as in P . Suppose A is the
merged vertex. If in P , the face B only contains one of v1 or v2, then in P ′ there will be
exactly two proper faces between A, the merged vertex, and B (i.e. the same ones as in P ).
If in P , the i-face B contains both v1 and v2, then Conditions (1) and (4) tell us that in P ,
the 1-sections B/v1 and B/v2 share exactly one proper face, i.e. some E from E ; then in P ′,
the new 1-section B/v1 has exactly two proper faces, since the common face E is removed
by the contraction. Hence, (P4) holds when, in P , the face A is in D but the face B is not.
If in P , the face B is in D but A is not, then B is F in P and B is F1 or F2 in P ′.
60

Then in P , the (i − 2)-face A is incident to F but not incident to G. By Condition (0),
this means that the (i− 1)-faces in B/A = F/A in P are both incident to the same face F1
or F2 in P ′, because the corresponding vertices of G lie in the same connected component
of G − {v1, v2}. Hence, B/A is identical in P and in P ′, except that the greatest face F is
renamed F1 or F2.
Finally, if in P , both A and B are in D (so B = F ), then in P ′, we have B = F1 or
B = F2 and A is a vertex of F1/G or F2/G in P ′; since these 2-sections are in fact polygons,
(P4) holds in this case. This covers all cases for rk(A) = i− 2.
Now suppose rk(A) = i − 3. If none of the proper faces of B/A is the merged vertex
v1 in P ′, then B/A in P ′ is identical to B/A in P and so (P4) holds in this case. Suppose
one of the intermediate faces is v1. Consider B/A in P : we note that since B exists in P ′,
in P it cannot be one of the faces in E , and so B does not contain both v1 and v2 in P , so
w.l.o.g. say B/A contains v1 but not v2. Then B/A must have two proper faces in P : one
is v1, and we call the other K. Then both v1 and K are also proper faces of B/A in P ′ (the
merged face v1 in P ′ inherits all the incidences of v1 in P , and the face K in P is unaffected
by the construction), and we cannot have any additional such faces (the construction does
not introduce new incidences between (i− 3)-faces and (i− 2)-faces, so there cannot be any
new incidence between A and some (i − 2)-face in P ′). Hence, (P4) holds in this case as
well.
Now let rk(A) = i− 4. If B is not v1 in P ′, clearly (P4) holds since the section B/A of
P ′ is identical to the corresponding section in P . If B is v1 in P ′, then in P , A may or may
not be a common corank-2 face of v1 and v2. If A is not a common corank-2 face, then B/A
in P ′ corresponds to B/A in P . If A is a common corank-2 face, then by Condition (2) the
section B/A in P ′ has exactly two proper faces (since the proper faces in P of v1/A and
v2/A are identical by assumption). Hence, (P4) also holds in this case.
Finally, if rk(A) < i− 4, then (P4) holds since no relevant faces or incidences of P are
modified by the contraction. Hence, (P4) holds in all cases.
It remains to show that (P3) holds.
(P3) We will first show that every section of the form F1/K or F2/K is connected in P ′.
W.L.O.G. let K < F1 in P ′ and consider the section F1/K. Note that F1/K is trivially
connected if rk(K) = i − 1 or rk(K) = i − 2, so we only need to examine the case where
rk(K) ≤ i− 3.
First, suppose that F1/K does not contain the merged face v1 in P ′: then F/K in P
61

does not contain v1 or v2, so by Lemma 5.2.1 (and its notation) we know that every facet
of F/K in P is in E1 (it is not possible that every facet of F/K in P is in E2 since we would
then not have K < F1 in P ′). In that case, F1/K in P ′ is identical to F/K in P , and is
therefore connected.
Now suppose that F1/K contains v1 in P ′. We label the vertices of F/K in P as follows,
again bearing in mind Lemma 5.2.1: a vertex is labeled “1” if in P it is only contained in
a facet of F/K in E1, it is labeled “2” if in P it is only contained in a facet of F/K in E2,and it is labeled “3” if in P it is contained in v1 or v2. Clearly no vertex is labeled both “1”
and “2” since E1 and E2 are disjoint; moreover, no vertex is labeled both “1” and “3” since
v1 and v2 are each contained in exactly one element of E1 and exactly one element of E2(similarly, no vertex is labeled both “2” and “3”). Hence, each vertex of F/K is assigned
at most one label. Suppose that some vertex v is not assigned a label: this means that it
is contained in a facet in E1 as well as a facet in E2 in P , but not contained in v1 or v2;
however, this then violates Lemma 5.2.1 applied to F/v. Therefore, every vertex must in
fact be assigned exactly one of these three labels.
Also note that no edge of F/K in P can contain a vertex of F/P labeled “1” as well as
a vertex labeled “2” (the edge would not lie in any facets in E2 since it contains a vertex
labeled “1” and it would not lie in any facets in E1 since it contains a vertex labeled “2”,
so it would not lie in any facets at all, since every facet is contained in one of the two sets).
Finally, note that the vertices of F1/K in P ′ are exactly the vertices of F/K in P that
were labeled “1” or “3”, and the edges of F1/K in P ′ are exactly the edges of F/K in P
joining two vertices each labeled “1” or “3”; any edge containing a vertex labeled “2” does
not exist in F1/K since such edges are only incident to facets in E2.We will now show that we can move from any vertex X of F1/K in P ′ to any other
vertex Y .
First, suppose that X and Y are both labeled “3”: then clearly we can move from X to
v1 to Y , since X and Y in P lie in v1 or v2.
Then suppose that one of the vertices is labeled “1” (say X) and the other is labeled
“3” (say Y ). In F/K in P , we can move along the 1-skeleton to get from X to Y . At
some point in this sequence, we pass from a vertex labeled “1” to a vertex labeled “3” (via
an edge); until the first occurrence of this, every vertex in the sequence is labeled “1”. So
in P ′, we can take the same sequence from X onwards until we hit the first vertex labeled
“3”, and then move from this vertex, which lies in v1 or v2, directly to Y .
62

Finally, suppose that X and Y are both labeled “1”. In F/K in P , we can move along
the 1-skeleton to get from X to Y . If this sequence only passes through vertices labeled
“1”, we can take the same sequence in P ′. If it passes through vertices labeled “3”, we
can denote by W and Z the first and last such vertices in the sequence, respectively; then
in F1/K in P ′ we can move from X to W by the same sequence as in F/K in P , then we
can move from W to Z as described above, and finally we can move from Z to Y by the
same sequence as in F/K in P .
Therefore, in all cases, we can move from any vertex of F1/K in P ′ to any other vertex.
Hence, we can move from any proper face X to any other proper face Y by moving from
X down to a vertex, then moving over to a vertex contained in Y , then moving up to Y .
Hence, every section F1/K is connected in P ′ if F/K contains v1 or v2; similarly, every
section F2/K is connected in P ′ if F/K contains v1 or v2. We have now examined every
possible case, so we see that every section F1/K or F2/K is connected in P ′.
We will now proceed to show that P ′ is strongly connected, i.e. every section of P ′
is flag-connected, or equivalently, connected. Consider a section B/A of P ′: we want to
move from any flag Φ of B/A to any other flag Ψ of B/A via a sequence of successively
adjacent flags of B/A. We note that B/A corresponds to at least one section of P (it could
correspond to two if B or A is v1 in P ′), and every flag of B/A in P ′ corresponds to at least
one flag of B/A in P . So we start by examining the sequence of flags of B/A in P taking
Φ to Ψ. Suppose we have two adjacent flags in this sequence neither of which contains F
nor a face in E : then the two corresponding flags in P ′ are also adjacent. So when moving
from Φ to Ψ in B/A in P , it is trivial to translate to P ′ moves between flags not involving
F or a face in E .
Now consider a sequence of successively adjacent flags in B/A in P that contains a flag
containing F : translating the flags in the sequence to P ′, we may need to move a flag of
B/A containing F1 to a flag of B/A, adjacent in P , containing F2. Note that we have
established that every section in P ′ having F1 or F2 as its greatest face is connected, so we
deal here with the case that B 6= F1 and B 6= F2 in P . We would only need to do this move
if the two flags in P ′ were (i− 1)-adjacent in P ; if two flags in the sequence are k-adjacent
in P for k > i, we can use F1 or F2 for both flags in P ′ since F1 and F2 are contained in
the same set of faces; if they were k-adjacent in P for k < i − 1, then both k-faces would
be contained in the same (i − 1)-face and hence in the same face F1 or F2. Moreover, we
would only need to do this move if the common (i− 2)-face of the two (i− 1)-adjacent flags
63

was v1 or v2 in P ; otherwise, again, we see that both flags would have the same i-face, F1
or F2, in P ′. In that case, calling the common (i+ 1)-face of the two flags I, we can move
one flag to the other in B/A in P ′ since the rank-2 section I/v1 of B/A is connected (hence
flag-connected) in P ′ by (3) (we can apply (3) since we know I contains both v1 and v2 in P
since I > F ). Hence, when translating the sequence of successively adjacent flags in B/A
in P to a sequence of successively adjacent flags in B/A in P ′, we can move through F
without incident.
Now say we have a sequence of successively adjacent flags in B/A in P that contains a
flag containing some face E in E . Listing this sequence of successively adjacent flags from Φ
to Ψ as Φ0 = Φ, Φ1, ..., Φm = Ψ, denote the first flag containing a face E from E by Φr and
examine all subsequent flags still containing E; let Φs be the last such flag (so that between
Φr and Φs, every flag in the sequence contains E). Then in B/A in P ′, there are no flags
corresponding to Φr or Φs and any of the flags between them (so in particular, we note that
we cannot have r = 0 or s = m, since Φ0 = Φ and Φm = Ψ are flags in B/A in P ′), but
there are flags corresponding to Φr−1 and Φs+1 (note that the two corresponding flags in P
cannot contain F or any of the faces in E , since F does not contain E, the (i − 1)-face of
Φr, and since no two of the faces in E are contained in a common i-face by (1)). We then
want to move in B/A in P ′ from the flag Φr−1 to the flag Φs+1. Since Φr−1 and Φr are
(i−1)-adjacent (one contains E, the other does not), they both include the same (i−2)-face,
and by (2) with Lemma 3.1.2 (applied with F,H,H ′ replaced by E, v1, v2 respectively) this
face is either v1 or v2; by the same reasoning, Φs+1 includes v1 or v2. So in the section B/A
of P ′, the flags Φr−1 and Φs+1 both include the merged face v1; so in particular, A ≤ v1 ≤ Bin P ′. We will see that to move from Φr−1 to Φs+1, we can first move the part of Φr−1
below v1 to the part of Φs+1 below v1, and then move the part of Φr−1 above v1 to the part
of Φs+1 above v1.
We will first show that v1/A is connected in P ′ and hence that we can move the lower
parts of one flag to the other. By (2) with Lemma 3.1.2 (applied as above), we know that
in P , the section E/A is a polytope with exactly two facets (namely v1 and v2); hence, by
(P4), every ridge of this polytope is contained in both v1 and v2, and so v1/A has the same
set of proper faces (and incidences) as v2/A in P , and so v1/A in P ′ also has the same set
of proper faces (and incidences). Hence, v1/A is connected in P ′.
Next, we will show that B/v1 is connected in P ′ and hence that we can move the upper
parts of one flag to the other. Note that B/v1 in P ′ consists of the faces and incidences
64

of B/v1 and B/v2 in P except that all faces in E are removed and F is split (if F < B); so
in particular, given any proper face of B/v1 in P ′, there is a corresponding face of B/v1 or
B/v2 in P .
Suppose we want to move from one proper face in B/v1 in P ′ to another, and moreover
that in P both of the corresponding faces contain v1 or both of the corresponding faces
contain v2. Then since every section of P is connected, we have a sequence of proper
successively incident faces in B/v1 or B/v2 in P taking the first face to the second. If this
sequence does not pass through any face in E , we can use it in P ′ as well and so we are done.
Otherwise, it does pass through some face E of E : then denote the face directly before E
in the sequence by C, and the face directly after E in the sequence by D; WLOG, we may
take C and D to have rank i. Then C and D must both exist in B/v1 in P ′; we wish to find
a sequence of proper successively incident faces from one to the other. Note that since E
is a vertex of B/v1 or B/v2 in P , the faces C and D must both be edges of B/v1 or B/v2,
i.e. rk(C) = rk(D) = i. Suppose rk(B) ≥ i+ 2. Then since B/E is a polytope (of rank at
least 2) in P , we have a sequence of proper successively incident faces in B/E taking C to
D; we can take this identical sequence in P ′ to move from C to D without passing through
E (the sequence in P never passes through F since F is not incident to E). This argument
does not apply if rk(B) = i + 1: in this case, B/E in P is a line segment, so we cannot
pass from C to D in B/E in P . However, in this case B is an (i+ 1)-face containing both
v1 and v2 in P , and so by (3) the rank-2 section B/v1 is connected in P ′, and so again we
see that we can move from C to D in B/v1 in P ′. Hence, we can move from any proper
face in B/v1 to any other proper face provided that they both contain v1 or both contain
v2 in P .
Now suppose that in P ′ we want to move from a proper face X1 of B/v1 to a proper
face X2 of B/v1, where X1 contains v1 and not v2 in P , and X2 contains v2 and not v1 in P .
Since B then contains v1 and v2 in P , the face B must contain F or some face from E by
(4). Suppose B contains F in P . Then in P ′, the face B contains F1 or F2 (B may coincide
with F1 or F2, but in that case, B/v1 is a line segment and hence is trivially connected).
Hence we may assume that F < B in P , and that F1, F2 < B in P ′. We know that the two
proper faces of F1/v1 in P ′ are such that, in P , one contains v1 and the other v2; the same
holds for the proper faces of F2/v1 in P ′. We established above that we can move from any
proper face in B/v1 to any other proper face in B/v1 in P ′ given that they both contain v1
or they both contain v2 in P , so we can move from X1 to a proper face H1 of F1/v1 which
65

contains v1 in P , and we can move from X2 to a proper face H2 of F2/v1 which contains v2
in P . It remains to show that we can move from H1 to H2 in B/v1 in P ′. If rk(B) ≥ i+ 2,
then we know that every (i + 1)-face I containing F1 also contains F2 and vice versa, and
so we can move from H1 up to I, and move from I down to H2, hence connecting X1 and
X2 in B/v1. If rk(B) = i+ 1, then B is a rank-(i+ 1) face in P containing both v1 and v2,
and so by (3) we know that B/v1 in P ′ is connected. So in any case, we can move from X1
to X2 in B/v1 in P ′ if X1 contains v1 and not v2 in P , and X2 contains v2 and not v1 in P .
We established earlier that we can move from any proper face in B/v1 in P ′ to any
other proper face if they both contain v1 or both contain v2 in P . Hence, we now see that
we can move from any proper face at all in B/v1 in P ′ to any other proper face, and so
B/v1 is connected in P ′. Hence, B/v1 is flag-connected in P ′, so we can move the part of
the previously defined flag Φr−1 of B/A above v1 to the part of Φs+1 above v1. We already
know that we can move the part of Φr−1 below v1 to the part of Φs+1 below v1, and so
we can move the full flag Φr−1 to the full flag Φs+1. Hence, given any two flags Φ and Ψ
in B/A in P ′, we can take the corresponding sequence of flags in B/A in P taking Φ to
Ψ, and get a (possibly longer) sequence of flags in B/A in P ′ taking Φ to Ψ, and so P ′ is
strongly flag-connected, therefore strongly connected, and so we have (P3), and so P ′ is a
polytope. This completes the proof.
Remark 5.2.3. Unlike the other conditions, Condition (3) of the previous theorem is a
condition on the contracted poset P ′, not the original polytope P . There is an equivalent
condition on P which, however, is nontrivial to state. Condition (3) says that for every
rank-(i + 1) face I of P containing v1 and v2, the rank-2 section I/v1 of P ′ is connected.
A necessary condition for (3) to hold is that I/v1 and I/v2 in P are not both apeirogons:
if they are, we see that I/v1 in P ′ cannot be connected, as illustrated in Figure 5.4, since
there is no sequence of successively incident proper faces connecting the face A to the face B
within the section I/v1 in P ′. Note that this figure shows part of the polyhedron I/G in P ,
where G is the least face of the polygonal section being contracted, and the corresponding
part of the poset I/G in P ′; the rank-2 sections I/v1 and I/v2 in P are apeirogonal vertex
figures.
Using the notation of Remark 5.2.3 and supposing that I/v1 and I/v2 are not both
apeirogons in P , we examine the sections I/v1 and I/v2 in P and see what the section I/v1
then looks like in P ′. In Figure 5.5, we see a few simple situations that may occur. In
66

Figure 5.4: When contracting a polygon with two apeirogonal vertex figures as shown, weget a disconnected vertex figure.
general, I/v1 and I/v2 in P may possibly contain some faces from E and may or may not
contain F ; for each of these faces, if it appears in one section, it must also appear in the
other (since all of these faces contain both v1 and v2), so we say the face is shared. The
examples in Figure 5.5 show the polygons representing the sections I/v1 and I/v2 of P and
the section I/v1 in P ′.
We see that in the first two examples, I/v1 in P ′ must be connected (they are clearly
polygons). However, in both of the latter two examples, I/v1 and I/v2 both contain exactly
two of the faces in E and not F , and yet I/v1 in P ′ may or may not be connected, depending
on how the faces A, B, C, and D connect to each other in I/v1 and I/v2 in P : as we can
see, in Case 1, the order of the four edges A, B, C, D is the same in I/v1 and in I/v2 in P ,
and the section I/v1 in P ′ is diconnected as a result; on the other hand, in Case, 2, the
order is A,B,D,C in I/v1 and A,B,C,D in I/v2, and the section I/v1 in P ′ is connected
as a result. (We see in Figure 5.6 polyhedra in which these types of sections actually occur;
we will discuss these examples in more detail later.) This is why Condition (3) is somewhat
complex; we cannot simply say that certain faces need to be in I/v1 and I/v2 in P and
certain other faces must not be in those sections. In general, as we consider putative sections
possibly sharing faces from E and/or the face F , for a given set-up (e.g. I/v1 and I/v2 do
not contain F but contain exactly two faces from E) there is almost always a way to produce
both a putative connected section I/v1 in P ′ as well as a putative disconnected section I/v1
in P ′ by changing how faces are connected in I/v1 and I/v2 in P (as demonstrated in the
last two examples in the above diagram). The only definite cases are when I/v1 and I/v2
in P contain only F but no faces in E (in which case, we see by the corresponding diagram
67

Figure 5.5: Examples of connectivity and non-connectivity in polygonal contraction.
68

in Figure 5.5 that the rank 2-section I/v1 in P ′ is connected); when the sections contain
only one face from E and not F (in which case, we again see by the diagram that the section
is connected); and when the sections contain none of the faces in E , nor the face F (in which
case it is easy to see that the section is disconnected).
In Figure 5.6, we see two examples of polyhedra I/G in which the scenarios for I/v1
and I/v2 described in the last two examples in Figure 5.5 actually occur; as before, I is an
(i+ 1)-face of P containing v1 and v2, and G is the least face of the polygonal section of P
to be contracted. Note that there are edges E, E′ connecting v1 and v2 in these examples
(so E 6= ∅), but this does not mean that the two vertices are adjacent in F/G, since in these
examples we do not have I > F .
Returning to the general discussion, we note that each of the following simple conditions
on P (alone) is sufficient for Condition (3) of Theorem 5.1 to hold.
• For all rank-(i + 1) faces I > v1, v2, the rank-2 sections I/v1 and I/v2 are not both
apeirogons, I contains no faces from E , and I > F .
• For all rank-(i + 1) faces I > v1, v2, the rank-2 sections I/v1 and I/v2 are not both
apeirogons, and I contains exactly one of the faces in E but not F , or I contains F
but none of the faces in E .
In order to show that none of the five conditions in the Polygonal Contraction Theorem
(Theorem 5.1) is redundant, we require examples of polytopes with polygonal sections
satisfying any four of the conditions for polygonal contraction but not the fifth. Figure 5.7
has diagrams representing five polytopes on which we will examine the conditions. Figure 5.8
has the corresponding edge graphs G, the edge graphs of the dual polytopes of F/F−1.
Recall that Condition (3) is the most complicated one, and it may actually imply some of
the other conditions; however, if we omit other conditions which are implied by (3), then
(3) becomes more complicated still. In order to keep (3) relatively easy to understand, we
present the polygonal contraction theorem with five separate conditions. As such, we are
not as interested in examining Condition (3) for these polytopes, and do not examine it in
the following examples (except for Example 3).
In Example 0 in Figure 5.7, we have a polyhedron embedded in a torus: the top and
bottom of the figure are identified as usual, as well as the left and right, as indicated by
the arrows. The polyhedron has four vertices, marked in red: the middle vertex is G. The
edges v1 and v2 are incident to G on the left and right; there are a total of eight edges
69

Figure 5.6: Two similar polygons with different results under polygonal contraction.
70

Figure 5.7: Five different examples of non-contractible polygonal sections F/G in polytopes.
71

Figure 5.8: The edge graphs G for the examples in Figure 5.7.
72

in the polyhedron (four horizontal and four vertical), and four 2-faces (squares). The face
F is the polyhedron itself; we take a prism over F in order to get the entire polytope P
we are interested in, then consider contracting the square F/G in P . Thus, n = 4 and
i = 3. Condition (0) fails for P , as we can see from the edge graph in Figure 5.8: the
removal of the edges v1 and v2 from the edge graph still leaves us with a connected graph.
Condition (1) holds trivially for P since there are no 2-faces containing both v1 and v2, so
E = ∅. Condition (2) also holds: the only common corank-2 face of v1 and v2 is F−1, and
we see that the sections v1/F−1 and v2/F−1 share both of their proper faces (G and another
vertex). Condition (4) holds since the only faces containing both v1 and v2 are F and P .
As noted above, we do not examine Condition (3).
In Example 1 in Figure 5.7, we have a polyhedron P with four vertices (two of which are
v1 and v2), a square face F in the back, a digon with the edges E and E′ in front, and two
triangles above and below this digon. We consider contracting the square F/F−1. Thus,
n = 3 and i = 2. Condition (0) holds for P , as we can see from the edge graph (of course,
Condition (0) holds trivially if rk(F ) = 2, since the graph G is a polygon with v1 and v2 as
non-adjacent edges). Condition (1) fails for P since E and E′ are contained in a common
2-face, i.e. the digon. Condition (2) holds trivially since there are no common corank-2
faces of v1 and v2 (again, this condition holds trivially if rk(F ) = 2). Condition (4) holds:
every 2-face of the polyhedron contains v1 and v2, and is either F itself or contains E or
E′. As noted above, we do not examine Condition (3).
In Example 2 of Figure 5.7, we have a polyhedron F with an infinite number of faces.
The polyhedron F has only five vertices: A, B, C, D, and G. It has an infinite number of
edges between each pair of vertices other than G, shown receding into the corners of the
figure (but there are no vertices at the corners). It has exactly one edge between G and
each other vertex (so F/G is a square). The polyhedron has four triangular faces in the
center and infinitely many digonal faces. Then we get a 4-polytope P by taking a prism
over F . Thus, n = 4 and i = 3. In the graph G, we see that G has become a square and
the other vertices of F have become apeirogons (the vertices in the graph go on forever in
all four directions). Removing v1 and v2 clearly disconnects the graph into a left part and
a right part, so Condition (0) holds for P . No 2-faces exist containing both v1 and v2, so
Condition (1) holds trivially since E = ∅. Condition (2) fails with H = F−1 since v1 and
v2 do not have both of their vertices in common. Condition (4) succeeds for P since the
only faces containing both v1 and v2 are F and P . As noted above, we do not examine
73

Condition (3).
In Example 3 of Figure 5.7, we have a simple polyhedron P with four vertices (two of
which are v1 and v2), five edges (one of which is E), and three 2-faces (two triangles in front
and one square, F , in the back). We consider contracting F/F−1 in P . Thus, n = 3 and
i = 2. Condition (0) holds trivially for P since rk(F ) = 2. Condition (1) also holds trivially
since there is only one edge E containing both v1 and v2. Condition (2) holds trivially since
rk(F ) = 2. Condition (3) fails for P : we see that in the poset P ′, the vertex figure P ′/v1 is
not connected since there is no way to move from the faces in the top half of the diagram to
the faces in the bottom half of the diagram. Condition (4) holds: all three 2-faces contain
both v1 and v2, and they are either the square F or the two triangles containing E.
In Example 4 of Figure 5.7, we have a simple polyhedron P with four vertices (two of
which are v1 and v2), four edges, and two squares (these squares contain the same vertices
and edges; we can visualize one, F , being in front, and the other, F ′, in the back). We
consider contracting the square F/F−1 in P . So again, n = 3 and i = 2. Condition (0)
holds trivially for P since rk(F ) = 2. Condition (1) holds trivially since there are no edges
containing both v1 and v2, so E = ∅. Condition (2) also holds trivially since rk(F ) = 2.
Condition (4) fails for P since F ′ contains v1 and v2 but does not contain F . As noted
above, we do not examine Condition (3).
Condition (0) has some interesting consequences on a polytope P . For example, let A
be an (i − 3)-face of P such that A is incident to exactly one of the two (i − 2)-faces v1
or v2. Then if the rank-2 section F/A is not an apeirogon, it corresponds to a cycle in Gwhich contains exactly one of the edges v1 or v2. But every edge of G other than v1 and v2
must have both of its vertices assigned to the same face F1 or F2 of P ′, so since the edges
v1 and v2 each have one vertex assigned to F1 and the other vertex to F2, having such a
cycle gives us a contradiction (there is no way to assign each vertex of the cycle to a face
F1 or F2 so that every edge of the cycle other than v1 or v2 has its vertices assigned to the
same face). Therefore, every such rank-2 section F/A must be an apeirogon. In fact, if
no such faces A exist, then Condition (2) immediately follows - i.e., in a polytope without
apeirogons, Condition (0) implies Condition (2).
74

5.3 Polygonal Contraction for Polytope Lattices
In this section, we examine the contractability of polygonal sections in polytope lattices
and in particular, convex polytopes.
Corollary 5.3.1. Suppose P is a polytope lattice. Then a rank-2 section D = F/G of P
with rk(F ) = i and distinguished non-adjacent vertices v1 and v2 is contractible if and only
if i = 2 and there is no (i+ 1)-face I of P such that I/v1 and I/v2 are both apeirogons.
Proof. We first show that the conditions are necessary. So let D be contractible in P .
Suppose rk(F ) > 2. Then we have a corank-1 face H of G in P . Then H is a common
corank-2 face of v1 and v2 in P . Since P is a polytope lattice and G is a common corank-1
face of v1 and v2, the (i − 3)-face G must be the infimum of v1 and v2 in P . Hence, it
is not possible that we have another (i − 3)-face G′ such that v1, v2 > G′ > H, and so
Condition (2) for polygonal contraction fails. Therefore, D cannot be contractible in P ,
which is a contradiction.
Clearly if there exists an (i + 1)-face I such that I/v1 and I/v2 are both apeirogons,
then I/v1 in P ′ is disconnected, as we saw earlier, and so D cannot be contractible, again
a contradiction.
Now suppose the conditions of the corollary are satisfied, that is, rk(F ) = 2 and no
face I as described above exists. We verify that the conditions for the polygon contraction
hold with i = 2. Then Theorem 5.1 applies, and completes the proof of the corollary.
Condition (0) holds trivially since rk(F ) = 2. Condition (1) also holds trivially since E = ∅(suppose there was some edge E in E ; it would be the supremum of the two vertices v1
and v2 of D, and therefore would be contained in F , which clearly cannot be the case in
a polytope lattice). Condition (2) holds trivially since there are no corank-2 faces of any
vertices. Condition (3) holds because every 3-face containing v1 and v2 must contain F ,
the supremum of v1 and v2 in P , and so we always are in the case represented by the first
diagram of Figure 5.5. Condition (4) holds because every face containing v1 and v2 must
contain F by the same reasoning as for (3).
Note 5.3.2. If P is a convex polytope, then a 2-section F/G of P with distinguished non-
adjacent vertices is contractible if and only if rk(F ) = 2 (since convex polytopes cannot
contain apeirogonal sections).
75

Clearly if we perform the polygon contraction on a 2-face of a polytope lattice and the
distinguished vertices are two steps apart in the edge graph of the 2-face, we will produce
digons, and therefore not get a polytope lattice from the contraction. Another way we can
fail to produce a polytope lattice is seen in the example obtained by merging the opposite
vertices of the hexagon in a hexagonal pyramid: call these vertices v1 and v2, and call the
apex z. Then in P ′, we have two distinct edges (v1, z) and (v2, z) with identical vertex
sets (since v1 and v2 are identified), so clearly P ′ is not a polytope lattice. However, some
polytopes produced via polygon contraction are in fact polytope lattices (and even convex
polytopes): an example is the resulting polytope when merging the opposite vertices of one
hexagon in a hexagonal prism. We see these two examples in Figure 5.9. Note that both
examples are looking at a top-down view of the pyramid or prism respectively; in the first
example, v1 and z are not identified, but rather z lies above v1 (then after contraction, we
have two edges between v1 and z). The result of contraction in the second example may
not appear to be quite convex, but the vertices can in fact be arranged in 3-space in such
a way that the polytope is convex.
5.4 Connections to the Helfand Construction
As we have seen, Condition (0) of Theorem 5.1 for polygonal contraction is quite strong.
It has major consequences on the polytope, and it never holds for polytope lattices unless
rk(F ) = 2. We can then ask whether there are ways to ensure Condition (0) if F is of
higher rank. In fact, the Helfand construction produces examples with polygonal sections
F/G at higher ranks for which Condition (0) holds, as well as Condition (2), as we will
show in Theorem 5.2. The following propositions show this:
Proposition 5.4.1. Suppose we apply the Helfand construction to a k-face A of an n-
polytope P to get an n-polytope P . In P , let F be a (k + 3)-face and G a (k − 1)-face with
G < A < F . For any face X of P with X > A, we denote by X the corresponding new face
of P . Then in P , if the polygonal section F /G has two non-adjacent vertices v1 and v2, the
set {v1, v2} is an edge cut of the graph G, the edge graph of the dual polytope of F /F−1. In
particular, Condition (0) of Theorem 5.1 holds.
Proof. Recall that F has rank k+2 in P , so F /G is a rank-2 section of P . We first examine
the corank-1 faces of F in P . These are exactly the new faces corresponding to the corank-1
76

Figure 5.9: One example of polygonal contraction in convex polyhedra breaking the latticecondition, and one example (at the bottom) preserving it.
77

faces of F in P which contain A in P , and so they are exactly the edges of the polygon
F /G in P (since G < A in P ).
We next examine the corank-2 faces of F in P . These are exactly the new faces corre-
sponding to the corank-2 faces of F in P which contain A in P , and so they are exactly the
vertices of the polygon F /G in P (since G < A in P ).
Hence, G consists entirely of the single cycle corresponding (dually) to the rank-2 sub-
section of F /F−1, so clearly {v1, v2} is an edge cut of G.
Proposition 5.4.2. Suppose we apply the Helfand construction as described in Proposi-
tion 5.4.1 to obtain a polytope P from P . Then for every common corank-2 face H of v1
and v2 in P , the proper faces of v1/H are the same as the proper faces of v2/H, so in
particular, Condition (2) of Theorem 5.1 holds.
Proof. We note that v1 and v2 have rank k in P . When the Helfand construction is applied
to a k-face A of a polytope P , that face is removed and replaced by new k-faces, one for
each (k + 1)-face containing A in P . In particular, v1 and v2 are new k-faces of this kind.
Each of these new k-faces have the same lower-rank incidences as A in P ; they only differ
in their higher-rank incidences. Therefore, v1 and v2 are incident to the exact same set of
faces of lower rank in P , and so our condition clearly holds.
We can now examine the conditions on P which are necessary and sufficient for F /G to
be contractible in P :
Theorem 5.2. Let P be an n-polytope with a polygonal section D = F/A with rk(F ) = i
such that i ≥ 3 (so rk(A) = i−3), and such that we have distinguished non-adjacent vertices
v1 and v2 of F/A. Let G be an (i−4)-face of P with G < A. Let P be the n-polytope achieved
from P by applying the Helfand construction (at level i − 3) to A, with polygonal section
D = F /G determined by the (i− 1)-face F of P corresponding to F . Let E be the set of all
(i − 1)-faces in P containing both v1 and v2. Then D (with distinguished vertices v1 and
v2, of ranks i − 3 in P ) is contractible in P if and only if the following conditions hold in
the original polytope P :
(1) No two faces in E are contained in a common i-face of P .
(2) For every (i + 1)-face I > v1, v2, the section I/v1 is connected in the poset P obtained
by performing polygonal contraction on F/A in P itself (even if P is not a polytope).
(3) For every face J in P containing both v1 and v2, we have J ≥ F or J ≥ E for some E
in E.
78

In Figure 5.10, we see an example of the entire process for n = 4 and i = 4. We start
with the cubic tessellation P of 3-space and apply the Helfand construction to an edge A
(shown at the top of Figure 5.10). Since A is a 1-face, the 4-face F can only be the entire
polytope itself, P . The 0-face G can be either of the vertices of this edge; the result is
the same. In the 4-polytope P , the face F is a 3-face (the middle diagram of Figure 5.10)
consisting of four digons tessellating a 2-sphere in an edge-to-edge manner, and then the
polygon F /G is a square (so, the ‘vertices’ of F /G are the edges of the digons, and its
‘edges’ are the digons themselves). (As a word of caution, although F coincides with the
maximal face of P , the corresponding face F of P does not coincide with the maximal face
of P ; in short, F = P does not imply F = P .) Finally, we contract two opposite vertices
of F /G, i.e. two opposite edges in our four-digon polyhedron, which results in the bottom
polytope of Figure 5.10: we now have two adjacent polyhedra as facets where A used to be,
each consisting of two digons joined edge-to-edge.
Proof of Theorem 5.2. We first show that if any of the conditions of this theorem are vio-
lated, then the polygon D is not contractible; that is, the conditions are necessary.
Suppose (1) of the present theorem does not hold in P , i.e. we have two faces E′ and
E′′ in E contained in a common i-face L. In P , we have a set of new faces E := {E|E ∈ E},with each new face in E having rank i− 2, one lower than the rank of each face in E . This
set of faces E is exactly the set of (i− 2)-faces in P containing both v1 and v2. Then in P ,
we violate Condition (1) of Theorem 5.1 for polygonal contraction in P , since E′ and E′′
are (i− 2)-faces containing both v1 and v2, and are contained in a common (i− 1)-face L.
Suppose (2) of the present theorem does not hold. Then in P , we violate Condition (3)
of Theorem 5.1, since I/v1 in the poset P ′ obtained by contracting F /G in P is naturally
isomorphic to I/v1 in P , but is moved down in rank by 1.
Suppose (3) of the present theorem does not hold, i.e. we have some face J > v1, v2
in P such that J does not contain F nor any face in E . Then in P , we would like to confirm
that indeed, J (which clearly contains v1 and v2) does not contain F nor any E in E . This
is clear since incidences between new faces in Helfand’s construction are exactly identical
to the incidences between their corresponding old faces, i.e. two new faces B and C are
incident in P if and only if B and C are incident in P . Hence, Condition (4) of Theorem 5.1
is also violated in P .
Therefore, the three conditions in the present theorem are necessary for D to be con-
tractible. It remains to show that they are sufficient.
79

Figure 5.10: Producing and contracting polygons with the Helfand construction.
80

Suppose the three conditions in the present theorem are satisfied for P and F/G. We
first note that then Conditions (0) and (2) of Theorem 5.1 hold for P and F /G, by Propo-
sitions 5.4.1 and 5.4.2.
We examine Condition (1) of Theorem 5.1 for P : the (i − 2)-faces of P containing
both distinguished vertices v1 and v2 of F /G are exactly the faces in E . Clearly no old
(i− 1)-face of P contains two faces from E since every new face is contained in exactly one
old face of one rank higher than itself, and no new (i − 1)-face contains two faces from Eby Condition (1) of the present theorem (i.e. if some new (i − 1)-face H of P contained
two faces E1 and E2, then we would have H > E1, E2 in P , violating Condition (1) of the
present theorem), so Condition (1) of Theorem 5.1 holds.
Next, we examine Condition (4) of Theorem 5.1: let J ≥ v1, v2 in P . Suppose J = B is
a new face. Then by Condition (3) of the present theorem, B ≥ v1, v2, so B ≥ F or B ≥ Efor some E in E , so J = B ≥ F or J = B ≥ E, satisfying Condition (4) of Theorem 5.1
for P . Now suppose J is an old face. Since J > v1, v2 in P , we must have J > v1, v2 in P .
Then by Condition (3) of the present theorem, J ≥ F or J ≥ E for some E in E , and
therefore J ≥ F or J ≥ E. Hence, we have Condition (4) of Theorem 5.1 for P in this case
as well, and so Condition (4) is satisfied in all cases.
Finally, we examine Condition (3) of Theorem 5.1 for P : let I be an i-face of P containing
v1 and v2. Suppose I is a new face with I = C for some old face C. Then as mentioned
earlier, the section I/v1 in the contracted version of P is identical to the section C/v1 in P
(up to a shift in rank), and so Condition (3) of Theorem 5.1 for P holds by Condition (2)
of the present theorem for P . Now suppose I is an old face. Then if I > F , we must have
I = F , in which case I in P contains none of the faces from E and hence, as a face of
P , none of the faces from E ; moreover, we note that I/v1 (and likewise I/v2) must be a
triangle, and hence not an apeirogon, as we can see in Figure 5.11.
This gives us Condition (3) of Theorem 5.1 for P in this case. Now suppose that the
old face I does not contain F . Then since I contains v1 and v2, I must contain v1 and v2.
Then by Condition (4) of Theorem 5.1 for P (which we already know must hold), I > E for
some E in E (since we already know that I does not contain F and hence does not contain
F ). Moreover, I, as a face of P , cannot contain more than one face in E by Condition (1)
of the present theorem. We then see, again, that I/v1 must be a triangle (this is illustrated
in Figure 5.12), and so Condition (3) of Theorem 5.1 is again satisfied for P . Hence, we
have Condition (3) of Theorem 5.1 for P in all cases.
81

Figure 5.11: The Helfand construction, in this case, produces a triangle from a line segment.
Figure 5.12: The Helfand construction produces a triangle here as well.
82

Therefore, since all the conditions for polygonal contraction hold for P , the section F /G
in P is contractible.
Note 5.4.3. With some basic investigation, we can see that Theorem 5.2 still holds if we
apply the global Helfand construction instead of the local Helfand construction.
Corollary 5.4.4. Let P be a polytope lattice of rank n, and let P be an n-polytope obtained
from P by applying the Helfand construction to a k-face A with 0 ≤ k ≤ n− 4. Let F and
G be faces of P with rk(F ) = k + 3, rk(G) = k − 1, and G < A < F . Then the polygonal
section F /G in P is contractible if and only if F /G has at least four vertices and for every
(i + 1)-face I of P , at least one of the sections I/v1 and I/v2 of P is a finite polygon. In
particular, if P is a convex polytope then F /G in P is contractible if and only if F /G has
at least four vertices.
Proof. We first show that F /G is not contractible in P if F /G has at most three vertices
or there exists an (i + 1)-face I of P such that I/v1 and I/v2 are both apeirogons in P .
Clearly if F /G is a digon or triangle then there are no two non-adjacent vertices in F /G,
so F /G is not contractible. If I/v1 and I/v2 are both apeirogons in P , then the resulting
rank-2 section I/v1 in P is not connected, so Condition (3) of Theorem 5.2 fails.
We now show that if F /G has at least four vertices and for every (i+ 1)-face I in P at
least one of the sections I/v1 and I/v2 is a finite polygon, then F /G is contractible in P .
We do this by examining the three conditions of Theorem 5.2.
Since P is a polytope lattice, we immediately know that E = ∅, and so Condition (1) of
Theorem 5.2 holds trivially. As noted in the earlier investigation of polygonal contraction
in polytope lattices, Condition (2) of Theorem 5.2 holds if and only if there are no (i+ 1)-
faces I such that I/v1 and I/v2 are both apeirogons. We can also see that Condition (3)
of Theorem 5.2 must hold since F must be the supremum of v1 and v2. Therefore, since all
three conditions of Theorem 5.2 hold, F /G is contractible in P .
Finally, if P is a convex polytope, then every section of P is finite, so only the condition
on the size of F /G remains.
83

Chapter 6
Polygonal Contraction and
Symmetry
In this chapter, we discuss possible global versions of polygonal contraction: instead of
contracting a single polygonal section, we contract a set of polygonal sections successively.
If the contraction is performed in some way symmetrically, then we may know something
about the automorphism group of the resulting polytope.
6.1 Multiple Polygonal Contraction
We first consider the question: suppose we have two polygonal sections F/G and F ′/G′ in
a polytope P , both of which are contractible; can they both be contracted successively? In
other words, if we first contract F/G to get a polytope P ′, then is F ′/G′ still contractible in
this new polytope? In general, this question is not clear (and we can find various examples
in which both polygonal sections cannot be contracted), but we can produce some sufficient
conditions on the two polygonal sections in P that will allow both to be contracted:
Proposition 6.1.1. Let P be an n-polytope with two contractible polygonal sections F/G
and F ′/G′, where F and F ′ both have rank i in P . If F 6= F ′ and the two polygonal
sections do not share distinguished vertices (meaning that the sets {v1, v2} and {v′1, v′2} of
distinguished vertices for F/G and F ′/G′, respectively, are disjoint), then both polygonal
sections can be contracted (meaning that in P ′, the polytope produced by contracting F/G,
the section F ′/G′ still exists and is contractible).
84

Proof. We confirm that each of the five conditions of Theorem 5.1 holds for F ′/G′ in P ′.
First, we examine Condition (0) for P ′. We know that in P , Condition (0) holds for
F ′/G′. The contraction of F/G in P has an effect on F ′/F−1 (and hence the edge graph G′
of its dual (F ′/F−1)∗) only if F ′ contains the distinguished vertices v1 or v2 of F/G in P .
Hence, if F ′ does not contain v1 or v2, then F ′/F−1 survives in P ′ and Condition (0) holds
for F ′/G′ in P ′ since the graphs G′ are identical in P ′ and in P .
Then suppose that F ′ contains exactly one of the faces v1 or v2 in P (although not as a
distinguished vertex of F ′/G′). Clearly in P ′, the graph G′ will be identical to G′ in P , up
to the renaming of the edge v1 or v2, respectively, as the merged “edge” v1: the edge will
still be present, and it must still contain the same vertices, since the merged face v1 in P ′
has all of the incidences that v1 and v2 do in P .
Finally, suppose that F ′ contains both of the faces v1 and v2 in P (again, neither as a
distinguished vertex of F ′/G′). Then by Condition (4) of Theorem 5.1 for F/G and P , the
face F ′ must contain some (i − 1)-face E from E , the set of (i − 1)-faces of P containing
v1 and v2. Suppose F ′ contains a second such face E′: we know from Condition (2) of
Theorem 5.1 for F/G in P along with Lemma 3.1.2 (applied with v1 and v2 in place of H
and H ′) that E and E′ each contain no (i− 2)-faces other than v1 and v2. Then in G′ in P ,
each of the vertices E and E′ can only be contained in the two edges v1 and v2 joining E and
E′. However, G′ in P must have other edges (e.g. v′1 and v′2), so the graph is disconnected,
which gives us a contradiction to the assumption that there are two faces of E containing
v1 and v2. So F ′ must contain a face E from E , but cannot contain any other face from E .
Then in G′ in P , E is a vertex contained only in the two edges v1 and v2; this follows as
before. Let A be the second vertex of v1 and B be the second vertex of v2. Then in G′
in P ′, the edges v1 and v2 have been merged and E has been removed, so that the merged
edge v1 now contains the two vertices A and B. Now since {v′1, v′2} is an edge cut of G′ in P
and v′1 and v′2 are both distinct from v1 and v2, we can see that {v′1, v′2} is also an edge cut
of G′ in P ′ (the only change to the graph was the replacement of the two edges v1 and v2
adjacent at the vertex E of degree 2, with one edge).
Hence, in all cases, Condition (0) of Theorem 5.1 holds for F ′/G′ and P ′.
We see that Condition (1) of Theorem 5.1 holds since no (i− 1)-faces of P acquire any
additional incidences with i-faces of P (the only change is that F has been split into two
new faces F1 and F2, but each (i−1)-face incident to F in P is incident to exactly one of F1
and F2 in P ′). We see that Condition (2) of Theorem 5.1 holds since all (i− 2)-faces have
85

the same lower-rank incidences in P ′ as they did in P , except for v1 and v2, which are by
assumption not the distinguished vertices of F ′/G′, and hence irrelevant to Condition (2)
on F ′/G′.
Now consider Condition (3) of Theorem 5.1 for F ′/G′ and P ′: Let I be an (i+ 1)-face
with I > v′1, v′2 in P ′. We note that I must then contain v′1 and v′2 in P . Examining the
polygonal sections I/v′1 and I/v′2 in P ′, we see in the following argument that they must in
fact be identical to I/v′1 and I/v′2, respectively, in P . First of all, the only i-face affected by
the construction of P ′ is F , but since v′1 and v′2 are not the distinguished vertices of F/G,
Condition (0) on F/G and P tells us that, if F > v′1 or F > v′2 in P , then both proper faces
of F/v′1 or F/v′2, respectively, in P will lie in the same face F1 or F2 in P ′, meaning that
the relevant incidences in I/v′1 and I/v′2 are unaffected; F is merely renamed to F1 or F2.
Second, the only (i− 1)-faces affected by the construction of P ′ are the (i− 1)-faces (in E)
containing both v1 and v2 in P , which by Condition (2) with Lemma 3.1.2 cannot contain
any (i − 2)-faces other than v1 and v2, which are distinct from v′1 and v′2 by assumption;
hence, none of these faces from E appear in I/v′1 or I/v′2 in P . Therefore, we see that I/v′1
and I/v′2 are identical in P and in P ′, and so Condition (3) of Theorem 5.1 holds for F ′/G′
and P ′ since it holds for F ′/G′ and P .
Finally, consider Condition (4) of Theorem 5.1 for P ′: let J be a face in P ′ containing
both v′1 and v′2. If a face K in P of rank greater than i is incident to F , then as above, we
see that its incidences (or lack thereof) to v′1 and v′2 are the same in P ′ as in P . If K is
not incident to F , then clearly the incidences are again the same, since any sections of the
form K/v′1 or K/v′2 are entirely unaffected by the construction of P ′. Hence, the sections
J/v′1 and J/v′2 are identical in P and in P ′, so by Condition (4) on F ′/G′ and P , we know
that J is incident to F ′ or some face in E ′, the set of (i − 1)-faces of P containing v′1 and
v′2. In P ′ this is still the case, so Condition (4) must also hold for F ′/G′ and P ′.
Therefore, all five conditions of Theorem 5.1 hold for P ′, and so F ′/G′ is contractible
in P ′.
Note 6.1.2. The above proposition extends naturally to the following statement: given a
finite set of contractible polygonal sections {F/G}, all with top faces of the same rank, if
no two such polygons share greatest faces and no two share distinguished vertices, then all
of them can be contracted successively. For example, given the truncated square tiling (the
semiregular tiling of the plane with squares and octagons), each square is contractible and
no two squares share vertices, so we can contract all squares successively into pairs of digons
86

(choosing pairs of opposite vertices as distinguished vertices arbitrarily for each square).
Note 6.1.3. When contracting multiple polygonal sections as above (i.e. under the condi-
tions of the proposition), the order in which the polygonal sections are contracted is irrelevant
to the structure of the resulting polytope, so we can think of these contractions occurring
simultaneously rather than in sequence. Similarly, we can think of contracting a countably
infinite number of polygonal sections simultaneously, so we need not restrict ourselves to
finite numbers of polygons (it follows from the defining condition (P3) of abstract polytopes
that an abstract polytope must have a countable number of faces, and hence a countable
number of polygonal sections).
6.2 Connections to Symmetry
Proposition 6.2.1. Let P be a polytope with a (countable) set of distinguished simultane-
ously contractible polygonal sections (as in Proposition 6.1.1) {D = F/G}. Let Λ denote
the subgroup of the automorphism group Γ(P ) consisting of all automorphisms that permute
the polygonal sections D as well as the corresponding sets of distinguished vertices (i.e.,
we are considering sections D along with their distinguished vertices for contraction, and
we consider automorphisms of P that take a distinguished polygonal section and its set of
distinguished vertices to a distinguished polygonal section and its set of distinguished ver-
tices). Let P ′ be the polytope achieved after contracting every section D. Then Λ induces a
subgroup Λ′ of Γ(P ′) isomorphic to Λ, or more informally, Λ ≤ Γ(P ′).
Note 6.2.2. There is some abuse of notation in Proposition 6.2.1, as we are using the
same symbol Λ for a subgroup of Γ(P ) and of Γ(P ′). For this to make sense, for every
automorphism σ ∈ Λ we need a well-defined induced face map of P ′ which we can also call
σ (the proposition then says that this induced map σ is in fact an automorphism of P ′, and
that the set of all such induced maps is a subgroup of Γ(P ′) isomorphic to Λ). We define the
induced map σ on P ′ as follows. First, consider the effect of the original σ in P on a face
other than a greatest face of a distinguished polygonal section or a distinguished vertex. Since
such faces survive in P ′ under the contraction and no automorphism in Λ can send such
a face to a greatest face of a distinguished section or a distinguished vertex, we can define
σ in P ′ to act identically on such faces to σ in P . Next, consider the action of σ in P on
a distinguished vertex: it must send any given distinguished vertex v to some distinguished
vertex v′. In P ′, we have corresponding vertices to v and v′, since the contraction has merged
87

v with some other vertex and v′ with some other vertex, so we can have σ in P ′ send the
first merged vertex to the second. Finally, consider the action of σ in P on a distinguished
greatest polygon face D: it must send it to a distinguished greatest polygon face D′.
In P ′, the section D is split into polygons D1 and D2, and D′ is split into D′1 and D′2;
we need to send each of D1 and D2 to one of D′1 and D′2 in a natural way. To do this, we
examine the automorphism σ on P : it sends each proper face of D to a proper face of D′,
and sends the sets of distinguished vertices of D to that of D′. This means that there is a
natural correspondence between each of D1 and D2 and one of D′1 and D′2, which we can
find by examining their proper faces (so given a proper face of D1, we see what σ in P
sends that face to, and the result will be some proper face of either D′1 or D′2; we use this
to determine which of D′1 or D′2 the face D1 should be sent to). Hence, we see that each
σ ∈ Λ in P has a natural corresponding face map in P ′, which we can also call σ, and so
we have a well-defined set of face maps in P ′ induced by Λ; it remains to show that they
are all automorphisms, and that they form a group isomorphic to Λ.
Proof. Let σ be the face map on P ′ induced by σ ∈ Λ, so σ is a bijection of P ′. In
order for σ to be an automorphism, it needs to preserve incidences. We consider incidences
between faces with difference 1 in rank (clearly if σ preserves these incidence, it preserves all
incidences). We first note that σ must send greatest faces of contracted polygonal sections
to greatest faces of contracted polygonal sections, merged vertices to merged vertices, and
all faces not directly affected by the contraction (i.e. all other faces) to faces not directly
affected by the contraction; this is clear from the definition of Λ in P . So consider the
incidence I < J in P ′, where rk(J) = rk(I) + 1. If both I and J were not directly affected
by the contraction, then σ(I) and σ(J) in P ′ are identical to the original σ(I) and σ(J),
respectively, in P , and so σ(I) < σ(J) in P ′.
Suppose I is the greatest face of a contracted polygonal section, so rk(I) = i; then J is
some (i + 1)-face incident to I. In P , the original σ is an automorphism, so it sends this
incidence (replacing I with the greatest face of the original, not contracted polygonal section
of P ) to another incidence; in P ′, since the greatest faces of contracted polygonal sections
inherit all incidences to higher-rank faces, we see that σ also preserves this incidence, that
is, σ(I) < σ(J) in P ′. Now suppose J is the greatest face of a contracted polygonal section.
In P , the face I is also incident to J (replacing J with the greatest face of the original,
not contracted polygonal section of P ); the automorphism σ in P sends this incidence to
another incidence of the greatest face of a distinguished polygonal section with one of its
88

corank-1 faces. In P ′, the face σ(J) is the greatest face of a contracted polygonal section,
and σ(I) is incident to σ(J); we are assured that σ(I) in P ′ is incident to σ(J) in P ′ and
not to the other contracted polygonal section corresponding to σ(J) in P , by the definition
of the action of σ in P ′ as described in Note 6.2.2. Hence, σ(I) < σ(J) in P ′.
Now suppose I is a merged vertex. In P , the face J contains exactly one of the distin-
guished vertices corresponding to I, and σ sends this incidence in P to another incidence
of a rank-(i− 1) face containing a distinguished vertex. Hence, in P ′, the face map σ sends
the corresponding incidence to another incidence of a rank-(i− 1) face containing a merged
vertex, and again σ(I) < σ(J). Now suppose J is a merged vertex: then I is an (i− 3)-face
incident to J in P ′. In P , the corresponding I is an (i − 3)-face incident to one or both
of a pair of distinguished vertices, and σ sends this incidence to another incidence of an
(i− 3)-face with one or both of a pair of distinguished vertices. Hence, in P ′, the induced
map σ sends this incidence to another incidence, and so σ(I) < σ(J) as before. Therefore,
σ preserves all incidences in P ′, and so is an automorphism.
Let Λ′ be the set of all face maps of P ′ induced by automorphisms of P in Λ. Then it is
clear that Λ′ is a group. In fact, given two automorphisms σ1 and σ2 in Λ′, the composition
σ1 · σ2 is a well-defined automorphism in P ′, and moreover naturally corresponds to the
composition σ1 · σ2 of the original automorphisms σ1 and σ2 of P . Then all other defining
properties for groups follow immediately. Thus, Λ′ ≤ Γ(P ′).
It remains to show that Λ′ is isomorphic to Λ. To do this, we show that an automorphism
σ in P ′ can only be the identity map if the original σ in P is the identity map. Suppose
we indeed have an automorphism σ in P ′ which is the identity map. Then, as is evident
from the discussion in Note 6.2.2, the original σ in P must be the identity map on all faces
of P other than, possibly, some distinguished vertices: it may be that σ in P sends a pair
of distinguished vertices v1 and v2 to v2 and v1, respectively. In P , denote by {L1, L′1} the
set of edges containing v1 in the polygonal section D, and denote by {L2, L′2} the set of
edges containing v2 in the polygonal section D. Since v1 and v2 are non-adjacent vertices
in D, the two sets {L1, L′1} and {L2, L
′2} are disjoint; moreover, the original σ in P must
send each of these four edges to themselves. However, we then have a contradiction, since
σ in P does not preserve the incidence v1 < L1. Hence, σ in P must send v1 to v1 and v2
to v2, and is hence the identity map. Therefore, Λ′ is isomorphic to Λ.
Note 6.2.3. Although we must have Λ′ ≤ Γ(P ′), it is not always the case that Λ′ = Γ(P ′);
this is sometimes true and sometimes false. We see some examples below.
89

In the first example, we start with the Archimedean tiling of the plane by squares and
octagons, known as the truncated square tiling - call this polyhedron P (see Grunbaum and
Shephard (1987) for information on Archimedean tilings). We show part of P in Figure 6.1,
with three reflections marked in blue so that P has the following automorphism group:
Γ(P ) = 〈r0, r1, r2 | r2i , (r0r1)4, (r0r2)2, (r1r2)4〉
This is the string Coxeter group [4, 4] and a wallpaper group of type W14 (see Martin (1982,
Chapter 11) and Grunbaum and Shephard (1987) for information on wallpaper groups).
We consider either contracting all octagons (distinguished vertices marked in green, path of
contraction shown as a green line) or all squares (distinguished vertices marked in red, path
of contraction shown as a red line). Note that each individual square is indeed contractible,
and so is each individual octagon; we can in fact simultaneously contract all octagons and/or
all squares according to the distinguished vertices shown, as noted earlier.
Also note that there are infinitely many ways to choose which squares to contract (in
this case, we contract every square) and/or which octagons to contract (in this case, we
contract every octagon), and how to choose their distinguished vertices; in this case, we
choose to contract all squares and/or all octagons with distinguished vertices chosen in a
highly symmetric way in order to produce highly symmetric polyhedra via contraction. In
fact, in this example, the sets of distinguished squares and distinguished vertices can be
expressed as the orbits of a single distinguished square and pair of distinguished vertices
under a subgroup of Γ(P ); this of course is not true in general for an arbitrary choice of
distinguished squares and distinguished vertices (the same applies to the octagons in this
example).
We first consider contracting (only) all octagons. This gives us a tiling of the plane by
(combinatorial) squares, shown in Figure 6.2. For this polyhedron, which we will call P1, the
group Γ(P1) consists precisely of the automorphisms of P1 induced by automorphisms of P
which permute the sets of distinguished vertices (clearly they also permute the octagons).
The automorphism group Γ(P1), in terms of r0, r1, and r2, is 〈r2r1r0r1, r0r1r2r1, r0r2〉(the generators here are a vertical translation moving an octagon to an adjacent octagon, a
horizontal translation moving an octagon to an adjacent octagon, and a 180-degree rotation,
respectively), which is a wallpaper group of type W2.
We next consider contracting all squares in P and not the octagons. This gives us a
90

Figure 6.1: The truncated square tiling, with some reflections and paths of contractionshown.
91

Figure 6.2: The polyhedron P1 obtained by contracting all octagons in the truncated squaretiling.
92

Figure 6.3: The polyhedron P2 obtained by contracting all squares in the truncated squaretiling.
tiling of the plane by octagons and digons, shown in Figure 6.3. For this polyhedron, which
we will call P2, the group Γ(P2) consists precisely of the automorphisms of P2 induced by
automorphisms of P which permute the set of distinguished vertices (of course they also
permute the squares). The automorphism group is 〈r2r1r0r1, r0r1r2r1, r0, r2〉, which is a
wallpaper group of type W22 .
Finally, we consider contracting all squares and all octagons in P (we can equivalently
think of this as contracting all squares in P1 or all octagons in P2) to get the polyhedron P12
shown in Figure 6.4. The polyhedron P12 is a tiling of the plane by squares and digons, and
we can compare Γ(P12) to Γ(P ), Γ(P1), and Γ(P2). The automorphisms of P permuting
sets of distinguished vertices in octagons of P induce automorphisms of P1, and those which
also permute the sets of distinguished vertices in squares of P induce automorphisms of P1
which permute the sets of induced distinguished vertices in squares of P1, and in turn the
latter induce automorphisms of P12. The same holds with “squares” and “octagons” and
93

P1 and P2 interchanged, and yields the same set of automorphisms of P12, a subgroup of
Γ(P12). Moreover, this subgroup also coincides with the set of all automorphisms of P12
induced by all automorphisms of P which permute the sets of distinguished vertices in
squares and the sets of distinguished vertices in octagons. However, this subgroup of Γ12 is
proper; in fact, P12 has additional automorphisms, for example the reflection r3 depicted in
Figure 6.4 which does not exist in any of the polyhedra P , P1, or P2. The automorphism
group Γ(P12) is again a wallpaper group of type W22 , the same type as Γ(P2). The group is
different from Γ(P2) and is given by the following:
Γ(P12) = 〈r2r1r3r2, r3r1, r2r3r2, r3 | ..., r23, (r0r3)4, (r2r3)4, r3r1r3r0r2r1r2r0〉
Here, the four listed generators are two translations along the main diagonals of Figure 6.4
and two reflections in lines parallel to the main diagonals of Figure 6.4. The same relations
hold for Γ(P12) as for Γ(P ) (we have replaced those with ellipses in the list of relations),
but we have several new relations as well, which concern the new reflection r3.
A natural question now is whether we can continue contracting polygons in P12 in such a
way that we get some minimal polyhedron, i.e. a polyhedron with no contractible polygons.
In the case of P12, it seems as though no matter how many contractions we perform (of
course, it only makes sense to talk about performing a finite number of global contractions
of this type), we will still have a polyhedron with contractible squares. For example, one
natural way to contract P12 is to contract the squares in the orbit of a single square and
a pair of opposite vertices under the subgroup of Γ(P12) generated by a single translation
‘over’ (i.e. to an adjacent square) and a double translation ‘down’ (i.e. across a digon,
a square, and another digon). This produces a similar polyhedron (with an isomorphic
automorphism group), which we can again contract in a similar way, and we can repeat
this process indefinitely; the first step is shown in Figure 6.5 (note that we start with a
combinatorially identical but geometrically ‘straightened out’ version of P12, and that the
resulting polytope as drawn is also ‘straightened out’). If the number of digons between a
pair of horizontally-adjacent vertices is n on a given step, then it will be 2n+ 2 at the next
step. Note that we can imagine this sequence of contractions tending towards a certain
polyhedron, i.e. one with a single (horizontal) line of adjacent vertices, each of which has
a (countably) infinite number of digons to the next vertex; however, this is not actually a
polytope, as the vertex figures are not connected.
94

Figure 6.4: The polyhedron P12 obtained by contracting all squares and octagons all in thetruncated square tiling.
95

Figure 6.5: Further contraction of the truncated square tiling.
96

Figure 6.6: The truncated square tiling, with a different plan to contract the octagons.
While we may not be able to get a maximally-contracted polytope from P12, we can
actually get one from the original tessellation P via the sequence of contractions shown in
Figures 6.6 through 6.9 (note that the marked vertices in each figure refer to the vertices
that will be contracted in the next step, not the ones that were contracted in the previous
step).
The final polyhedron that we get in Figure 6.9 is a tessellation of the plane by triangles
and digons; since there are no polygons with at least four vertices, clearly we cannot contract
polygon faces any further, although in principle, contractions of vertex-figures might still
be possible.
A natural question to ask is: given some polyhedron with an infinite number of 2-faces,
does it have a maximal contraction? In other words, is it possible to contract polygon
faces in the polyhedron to get a polyhedron with no contractible polygon faces? A related
97

Figure 6.7: The resulting polyhedron from the previous contraction defined by Figure 6.6,with a plan to contract the pentagons.
98

Figure 6.8: The resulting polyhedron from the previous contraction defined by Figure 6.7,with a plan to contract the squares.
99

Figure 6.9: The final, maximally-contracted polyhedron, with only digonal and triangular2-faces.
100

question is: does every maximally-contracted polyhedron have only digons and triangles as
faces, or are there maximally-contracted polyhedra with larger faces?
Definition 6.2.1. An abstract (n + 1)-polytope P (with finite vertex-figures) is a (locally
finite) face-to-face tessellation of Rn (Schulte, 1993, Chapter 3.5) if P can be embedded
in Rn so that each of its facets is a geometrically convex n-polytope and the intersection of
any two faces is a (possibly empty) face of P .
Note 6.2.4. The specification of geometric convexity in the above definition is important
since it may be the case that an (n+ 1)-polytope P is embedded in Rn and has facets which
are isomorphic to convex n-polytopes without actually being geometrically convex; such an
example is discussed below.
For example, the truncated square tiling is a face-to-face tessellation of R2 by convex
tiles, as are the polyhedra in Figures 6.2 and 6.7. The polyhedra in the other related
figures are not, since they have digonal facets, which are not convex 2-polytopes. However,
if we were to contract all of the digons in those figures, we would indeed get face-to-face
tessellations of R2, except in Figure 6.3: in Figure 6.3, there is no way to embed the resulting
polyhedron in R2 while making all of the octagonal facets geometrically convex octagons.
An important fact, which follows quickly from the definition of a face-to-face tessellation,
is that every face-to-face tessellation is a polytope lattice.
By Corollary 5.3.1, we see that a polygonal section of a face-to-face tessellation P of Rn
is contractible if and only if the polygonal section is at level 2 (that is, it is actually a 2-face
of P ) and has at least four vertices (face-to-face tessellations cannot contain apeirogonal
faces since every facet of a face-to-face tessellation is a convex polytope). In other words,
the only way to have a face-to-face tessellation of Rn which is maximally contracted is to
have every 2-face be a triangle. Also, with Proposition 6.1.1, we see that we can contract a
set of 2-faces in a face-to-face tessellation of Rn if no two of the 2-faces share either of their
distinguished vertices. We would like to extend this result to the other polytopes we have
seen in this section which arise from face-to-face tessellations via polygonal contraction;
however, as we will see, we run into some issues.
Lemma 6.2.5. Let P be an abstract polytope with the property that (*) no non-adjacent
vertices of a 2-face of P are joined by an edge of P . Let P ′ be a polytope obtained from P by
contracting certain 2-faces of P once: this means that we may perform a multiple polygonal
101

contraction as in Prop. 6.1.1 on P to contract a finite or infinite number of 2-faces of P at
once. Then P ′ has the property (*).
Proof. Let F be a 2-face of P ′ with non-adjacent vertices v1 and v2. Then F corresponds
to exactly one 2-face of P , since the contraction of 2-faces in P affects each 2-face of P by
either leaving it unchanged or splitting it into two 2-faces.
Suppose F in P ′ is identical to its corresponding 2-face in P , and an edge E joins v1 and
v2 in P ′. Then E must join v1 and v2 in P since polygonal contraction does not produce new
edges, but this violates our assumption about P , since then F in P has two non-adjacent
vertices joined by an edge in P . Therefore, we have a contradiction, and so no edge can
join v1 and v2 in P ′.
Now suppose F in P ′ is the result of contracting a 2-face G in P , and an edge E joins v1
and v2 in P ′. Then v1 and v2 are also non-adjacent vertices of G in P and are also joined by
E in P , so again our assumption about P is violated and we have a contradiction. Again,
we see that no edge can join v1 and v2 in P ′.
Hence, in all cases, v1 and v2 cannot be joined by any edges in P ′, and so the property
(*) holds for P ′.
By applying Lemma 6.2.5 repeatedly, we see that if we start with any abstract polytope
P with the property (*) (in particular, a polytope lattice has this property) and perform
multiple polygonal contraction (as in Prop. 6.1.1) any number of times, we end up with
a polytope with the property (*). Using this result, we can see that a polytope achieved
from a lattice polytope by polygonal contractions satisfies certain conditions for polygonal
contraction. Given a face F at rank 2 of the polytope with two non-adjacent vertices, we
see that the set E as defined in Theorem 5.1 is empty. Since F has rank 2 and E = ∅, several
conditions for polygonal contraction are satisfied, but we run into issues with Condition (4)
of Theorem 5.1.
Condition (4) holds for any distinguished 2-face (with distinguished non-adjacent ver-
tices) of a polytope lattice, but may not hold for all distinguished 2-faces of a polytope
achieved from a polytope lattice via polygonal contractions. We see such an example in
Figure 6.3: let F be any octagon of the polyhedron shown, and set v1 and v2 to be non-
adjacent red and green (respectively) vertices at the top of the octagon. Then let J be
the octagon adjacent to F and directly above it: we see that J contains v1 and v2 but not
F (and E = ∅), so Condition (4) of Theorem 5.1 is violated and we cannot contract the
102

octagon F . Of course, as we have already seen, we can contract octagons in this polyhe-
dron; we just need to pick the appropriate distinguished vertices. Hence, it is possible that
given a polytope arising from a polytope lattice via polygonal contraction, we can contract
any 2-face with at least four vertices as long as we choose the correct vertices to merge.
Whether this is in fact the case is not clear.
103

Bibliography
B. Grunbaum. Convex Polytopes, Springer, New York, 2003.
B. Grunbaum and G. Shephard. Tilings and Patterns, W. H. Freeman and Company, NewYork, 1987
I. Helfand. Constructions of k-orbit abstract polytopes, Mathematics Dissertations. North-eastern University, Massachusetts, 2013.
G. Martin. Transformation Geometry, Springer-Verlag, New York, 1982.
P. McMullen. Combinatorially regular polytopes. Mathematika 14 (1967), 142-150.
P. McMullen and E. Schulte. Abstract Regular Polytopes, Cambridge University Press,United Kingdom, 2002.
E. Schulte. Tilings. In: Handbook of Convex Geometry, Elsevier Science Publishers, TheNetherlands, 1993, pp. 899-932.
R. Stanley. Enumerative Combinatorics, Wadsworth & BrooksCole, California, 1986
D. West. Introduction to Graph Theory, Prentice Hall, New Jersey, 2001
104