Embed Size (px)
Citation preview

PHYS
ICS
Contractile and chiral activities codetermine thehelicity of swimming droplet trajectoriesElsen Tjhunga,1, Michael E. Catesa, and Davide Marenduzzob
aDepartment of Applied Mathematics and Theoretical Physics, University of Cambridge, Cambridge CB3 0WA, United Kingdom; and bScottish UniversitiesPhysics Alliance, School of Physics and Astronomy, University of Edinburgh, Edinburgh EH9 3FD, United Kingdom
Edited by David A. Weitz, Harvard University, Cambridge, MA, and approved March 20, 2017 (received for review December 5, 2016)
Active fluids are a class of nonequilibrium systems where energyis injected into the system continuously by the constituent par-ticles themselves. Many examples, such as bacterial suspensionsand actomyosin networks, are intrinsically chiral at a local scale,so that their activity involves torque dipoles alongside the forcedipoles usually considered. Although many aspects of active flu-ids have been studied, the effects of chirality on them are muchless known. Here, we study by computer simulation the dynamicsof an unstructured droplet of chiral active fluid in three dimen-sions. Our model considers only the simplest possible combinationof chiral and achiral active stresses, yet this leads to an unprece-dented range of complex motilities, including oscillatory swim-ming, helical swimming, and run-and-tumble motion. Strikingly,whereas the chirality of helical swimming is the same as the micro-scopic chirality of torque dipoles in one regime, the two are oppo-site in another. Some of the features of these motility modesresemble those of some single-celled protozoa, suggesting thatunderlying mechanisms may be shared by some biological sys-tems and synthetic active droplets.
nonequilibrium phase transition | chiral active fluids | active droplets |cell motility
Nonequilibrium fluids in statistical physics fall into two maincategories: They may be externally driven or active (or pos-
sibly, both). In driven fluids, the energy is injected continuouslyinto the system globally or at boundaries, for example, by steadyshearing. On the other hand in active fluids, the energy is injectedinto the system locally by the constituent particles themselves(1). (This energy is then subsequently dissipated as heat.) Manyexamples of active fluids are biological in nature, such as bacte-rial suspensions (2), tissues (3), and actomyosin networks in thecytoskeleton of eukaryotic cells (4).
In the case of bacterial suspensions, the flagella of the bacteriacontinuously stir the solvent, driving the system out of equilib-rium and also yielding self-propulsion. In the case of actomyosin,the myosin motors pull the actin filaments together, causing themto contract lengthwise. Actomyosin contraction, in particular,is implicated in the swimming motility in Madin-Darby caninekidney (MDCK) tumor cells (5) and in some single-celledmicroorganisms (6, 7). In addition to these local sources ofenergy injection, many such fluids also have microstructures thatshow liquid-crystal–like ordering (2), albeit with polar ratherthan nematic order (4). Importantly, many of these active polarliquid crystals are also microscopically chiral (2, 8). For instance,the actin filaments that make up the actomyosin network aretwisted into right-handed helices, whereas the flagella in bac-terial self-propulsion are left-handed helices. Although manyaspects of active fluids have been extensively studied, much less isknown about the effects of chirality, particularly under confine-ment such as within a droplet.
Droplets of active fluid have been shown to display interest-ing swimming and crawling motility modes (9–12), which resem-ble those of biological cells. Our aim here is to study the effectsof chirality on the swimming motility of an active droplet inthree dimensions. In particular, we show that a droplet of chi-
ral active fluid can display complex swimming dynamics, includ-ing screw-like, run-and-tumble, helical, and oscillatory motion:These motility modes emerge as a consequence of chirality andof the coupling between active torque and force dipoles.
Intriguingly, the helical swimming mode displayed by our sim-ple model may be relevant to explain some features of the motil-ity of single-celled protozoans such as Toxoplasma gondii (6) andPlasmodium ookinete (7). (Toxoplasmosis is a common infec-tion in cats and immunodeficient humans whereas Plasmodiumis the parasite responsible for malaria.) When measured in vitroand in vivo, the trajectories of these organisms in 3D almostinvariably follow a left-handed helical path. Yet the actin fila-ments are right-handed helices; hence, as explained in detail later(Fig. 1), the natural microscopic chirality of actomyosin (thoughtto be responsible for the motility itself) is also right-handed.Thus, there seems to be a mismatch between the microscopicand the observed macroscopic chiralities. One suggested expla-nation for this mismatch is that the actin filaments are some-how oriented along microtubules, which are left-handed (13).We show here, however, that, in general, chirality selection inmacroscopic motion need not involve any contest between chi-ralities at the molecular or local scale. Instead, at least withinour model torque dipole system, the competition between localtwisting (chiral) and contraction (achiral) can reverse the hand-edness of the macroscopic motion without the presence of asecond chiral component. The mechanism of chirality reversalinvolves the polarization pattern of the active fluid at the dropletscale; this influences droplet shape and locomotion and in turndepends on the competition between contractile and twistingforces locally. Note that this mechanism is different from spon-taneous rotational or chiral symmetry breaking in active dropletswith extensile forces and/or anchoring conditions (11, 15, 16), indiffusiophoretic nematic droplets (15), or in swimmer aggregates(17, 18). In all those cases, the droplets or the aggregates lackany intrinsic chirality, but start rotating following spontaneous
Significance
Active fluids include bacterial suspensions, biological tissues,and the cytoskeleton. They are far from equilibrium becausethe fluid is continuously stirred by constituent particles them-selves. A model droplet of active fluid can show swimmingor crawling motilities resembling those in real biological cellsdespite the simplifications entailed. Here, we consider theeffects of microscopic chirality on the motility of these activedroplets. We find a rich phase diagram including oscillatorydynamics, run and tumble, and helical swimming with eitherthe same or opposite sign to the microscopic one.
Author contributions: E.T., M.E.C., and D.M. designed research, performed research, ana-lyzed data, and wrote the paper.
The authors declare no conflict of interest.
This article is a PNAS Direct Submission.1To whom correspondence should be addressed. Email: [email protected].
This article contains supporting information online at www.pnas.org/lookup/suppl/doi:10.1073/pnas.1619960114/-/DCSupplemental.
www.pnas.org/cgi/doi/10.1073/pnas.1619960114 PNAS | May 2, 2017 | vol. 114 | no. 18 | 4631–4636
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021

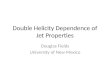
Fig. 1. (Left) Actomyosin contraction inside the eukaryotic cells generatesa force (F,−F) and a torque dipole (τ,−τ ). (Only two actins cross-linkedby a single myosin motor are shown.) (Right) Flagella rotation in bacterialsuspensions also generates a force (−F, F) and a torque dipole (−τ, τ ), butin opposite directions. (Only a single bacterium is shown.) The blue arrowsindicate the fluid flows created by the force or the torque dipoles. The actinimage is provided courtesy of the Mechanobiology Institute, National Uni-versity of Singapore.
breaking of chiral symmetry, so that they can rotate clockwise oranticlockwise with equal probabilities.
Model and SimulationsWe consider a droplet of active polar liquid crystal immersed ina passive isotropic fluid. The dynamical variables are a conservedscalar composition field φ(r, t), the polarization field p(r, t), andthe fluid velocity field u(r, t). Phenomenologically, the scalarfield φ represents the concentration of active particles such asbacteria (in a swarm) or actin filaments (in the cytoskeleton).The polarization field p then represents the average orientationof these particles. Finally u is the local average fluid velocity ofactive particles and solvent.
Our model includes two sources of active stress, arising fromforce dipoles and torque dipoles, respectively. These force andtorque dipoles arise naturally in the biological examples givenabove. In the case of actomyosin contraction, the myosin motorpulls twoactinfilamentstogether,creatingaquadrupolarfluidflow(blue arrows in Fig. 1, Top Left), which can be represented as a con-tractile force dipole. The filaments have a plus (or polymerizing)and a minus (or depolymerizing) end and they are aligned on aver-age in the same direction as p. Also, because the actin filaments aretwisted in a right-handed direction (19), the myosin motor tendsto rotate them as it pulls, creating a pair of counterrotating vor-tex flows (blue arrows in Fig. 1, Bottom Left), which we approx-imate as a right-handed torque dipole. Note that the helicity ofa fiber is reversed by reflection but not physical rotation. Hencethe torque dipole is unchanged if the polarization is reversed andindeedwouldstillbepresent ifonlyoneof thefilamentswasflippedover, creating a state of zero net polarization locally.
In the case of bacterial suspensions, for example, Escherichiacoli, the activity is provided by the rotation of the flagella. Theflagella rotate anticlockwise whereas the body rotates clockwise,resulting in a pair of counterrotating vortex flows (blue arrowsin Fig. 1, Bottom Right). Because the flagella are also helical,their rotation expels the fluid away from the bacterium, result-ing in an extensile quadrupolar fluid flow (blue arrows in Fig. 1,Top Right). These two processes can then be approximated as anextensile force dipole and a left-handed torque dipole. Note thatthe directions of the force and the torque dipoles in bacteria areopposite to those in actomyosin contraction.
In our generic model, we therefore assume that a force and atorque dipole are embedded in each active particle with direc-
tions parallel or antiparallel to p. Although we could also con-sider cases where the force dipole lies parallel and the torquedipole perpendicular to p, and vice versa, we are not aware ofbiological examples of this situation. Because the force and thetorque dipoles have a head–tail symmetry (but not the active par-ticle itself), all of the equations of motion below are symmetricunder a global reversal of polarity: p(r, t) → −p(r, t), for all r.There is an exception to this. If the active particles are swimming(as in the case of bacteria) or if there is an overall polymeriza-tion in one direction (as in the case of actomyosin), the globalp→ −p symmetry will be broken by a so-called “self-advection”term. (This causes the polarization pattern to move with fixedspeed along p itself.) Although it can be easily incorporated inthe model (12), for simplicity we do not consider self-advectionin this paper. The same applies to anchoring terms that can alsobreak p↔ −p symmetry (11). Even without such complications,we find a very rich dynamic phase diagram once local chirality isallowed for.
We consider a droplet of active polar fluid, defined such thatφ ' |p| ' 1 (active and polar) inside the droplet and φ ' |p| ' 0(passive and isotropic) outside the droplet. This is achieved byintroducing an equilibrium free energy (analogous to that ofbinary fluid) that stabilizes a phase coexistence between an activepolar and a passive isotropic phase (11). The equation of motionfor the variable φ is then simply a conserved convective-diffusionequation, whereas that for p is similar to the Leslie–Ericksenequation in liquid crystals (20).
Finally, the fluid velocity u is described by the Stokes equation,basically a momentum balance equation,
0 = −∇P + η∇2u +∇ · σp +∇ · σa , [1]
where P is the isotropic pressure, η is the fluid viscosity, and σp
is the passive elastic stress, which can be expressed as a com-bination of derivatives of the free energy. The explicit form forσp is analogous to that of standard equilibrium liquid crystals(20) (Materials and Methods). However, as we have seen fromFig. 1, the force and the torque dipole from each active particlealso pump the fluid solvent around it (resulting in quadrupolarfluid flow in the case of force dipoles or a pair of counterrotat-ing flows in the case of torque dipoles). Therefore, there exists anadditional nonequilibrium stress term in the Stokes equation thatcannot be written as a derivative of the equilibrium free energy.This additional stress term is derived explicitly by coarse grain-ing the force and the torque dipoles (21, 22), and the resultingexpression is
σaαβ = ζ1φpαpβ︸ ︷︷ ︸
force dipoles
+ ζ2εαβµ∂ν(φpµpν)︸ ︷︷ ︸torque dipoles
+ . . . , [2]
where the Greek indexes indicate Cartesian coordinates, εαβγis the Levi–Civita symbol, and ∂α is the partial derivative withrespect to rα. Here, ζ1,2 are activity parameters that quantifythe force dipoles and torque dipoles, respectively. The sign of ζ1determines whether the force dipoles are contractile as in acto-myosin or extensile as in bacteria (Fig. 1); we focus only on con-tractile active stress, for which ζ1 > 0.
Only the ζ2 term in Eq. 2 (which comes from the torquedipoles) is chiral; its divergence is the force density associatedwith an ensemble of microscopic torque dipoles. A differentway of introducing chirality in our model is by adding a passivecholesteric term to the free energy; we do not discuss this here.In both cases, the sign of the chiral term determines whether thesystem is right- or left-handed at the local scale defined by theequations of motion. Therefore, the chiral symmetry breaking isnot spontaneous here, but imposed. For ζ2 > 0 (right-handed),the fluid flow from the torque dipole is as shown in Fig. 1, Bot-tom Left; this is similar to the motion of closing a bottle cap. On
4632 | www.pnas.org/cgi/doi/10.1073/pnas.1619960114 Tjhung et al.
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021

PHYS
ICS
the other hand, for ζ2 < 0 (left-handed), the fluid flow is reversed(Fig. 1, Bottom Right) and hence resembles opening a bottle cap.We define the torque dipole in Fig. 1, Bottom Left to be right-handed because if we imagine applying such a pair of torques onboth ends of a piece of rope, it will tend to twist the rope intoa right-handed helix. With this convention, the activity of acto-myosin contraction in eukaryotic cells is right-handed whereasthat of bacterial suspension is left-handed. In this paper it is suf-ficient to focus only on right-handed activity ζ2 > 0 because theresult for ζ2 < 0 is just its mirror image.
The forms for the active stress in Eq. 2 are rather general andcan be obtained without any knowledge of actomyosin contrac-tion in the cytoskeleton or flagellar rotation in bacteria. Indeed,these follow from a hydrodynamic multipole expansion (23, 24)so long as the net force and the net torque are both zero.(Otherwise, the system is no longer active but a driven systemlike a colloid being pulled by an optical tweezer or gravity.) Insuch an expansion, the lowest-order contribution to the activestress comes from the force dipole whereas the lowest-order chi-ral contribution comes from the torque dipole that is effectivelya force quadrupole (because a point torque can be decomposedinto a pair of forces). Higher order terms come from other forcequadrupoles, six-poles, eight-poles, etc. The far-field flow fromthe force dipole scales with distance r as u ∼ 1/r2, whereas thatof the force quadrupoles is one order higher: u ∼ 1/r3. There arethree independent types of force quadrupole (23, 24) of whichthe torque dipole is the only chiral one. By retaining only thisterm, our model isolates the new physics introduced by leading-order chirality.
To characterize the motion of the droplet, we first definethe center-of-mass (CM) velocity of the droplet to be V(t) =∫drφ(r, t)u(r, t)/
∫drφ(r, t), where the integration range is
over the droplet phase (for all r such that φ(r, t)> 0.5). We thenalso define the angular velocity of the droplet about its CM tobe Ω(t) =
∫drφ∆r×∆u
|∆r|2 /∫drφ, where ∆r = r− R with R(t) the
CM of the droplet and ∆u = u−V. The integration range is againover the droplet phase.
We perform 3D hydrodynamic simulations, using a hybridlattice Boltzmann method (25, 26). All of the results beloware presented in dimensionless units: V = VηR/κ, Ω= ΩηR2/κ,ζ1 = ζ1R
2/κ, and ζ2 = ζ2R/κ (R is the radius of the droplet andκ is the elastic constant of the active gel; for more details seeMaterials and Methods).
ResultsForce Dipoles Only. First, we recapitulate the behavior of con-tractile droplets without chirality, that is, ζ1 > 0 and ζ2 = 0. Thiscase has been considered previously as a minimal model for cellswimming in 3D matrigel (11, 27) and extended to cell crawlingon a 2D surface (12, 28, 29). Fig. 2A shows the magnitudes ofthe CM velocity 〈V 〉 and angular velocity 〈Ω〉 of the droplet asa function of force–dipole activity ζ1. (The angle brackets indi-cate time averaging at steady state.) For small values of activity0<ζ1 <ζ
c11 , the droplet only slightly contracts in the direction
of p (red arrows) without any translational or rotational motion(〈V 〉 = 〈Ω〉 = 0, stationary phase).
At higher values of activity ζc11 <ζ1 <ζ
c21 , the droplet sponta-
neously swims in a straight line without any rotation (〈V 〉 > 0and 〈Ω〉' 0, linear swimming phase). This spontaneous swim-ming is mediated by a splay instability in the polarization fieldp, which creates an asymmetric flow field inside and outsidethe droplet (11). The (continuous) transition between quiescentand self-motile droplet occurs as the dimensionless parameterζ1 = ζ1R
2/κ, measuring the ratio between active dipolar forceand elasticity, exceeds a critical threshold (Scaling Analysis andUnits).
A
B
Fig. 2. (A) Phase diagram for an active droplet with only force dipole activ-ity (ζ1 > 0, ζ2 = 0). The plot shows the averaged CM speed 〈V〉 and angularspeed 〈Ω〉 as a function of force dipole activity ζ1. Insets show the snapshotsof the droplet morphology (gray surface) and the corresponding polariza-tion field p (red arrows) for the three different phases. Numerical precisionis ±0.01 for V and Ω. (B) Similar phase diagram for an active droplet withonly torque dipole activity (ζ1 = 0, ζ2 > 0). (All quantities are in dimension-less units, shown in main text.)
Finally at even larger values of activity ζc21 < ζ1, the contrac-
tile activity can stabilize an aster defect in the polarization fieldp and the droplet becomes stationary again (〈V 〉 = 〈Ω〉 = 0,stationary-aster phase).
Torque Dipoles Only. We next examine the effects of the torquedipole term ∝ ζ2 in Eq. 2. For simplicity, we first consider adroplet of active fluid with only torque dipoles and no forcedipole contribution (ζ1 = 0, ζ2 > 0).
Fig. 2B shows the averaged CM speed 〈V 〉 and angular speed〈Ω〉 as a function of torque dipole activity ζ2 at steady state.For small values of activity 0 < ζ2 < ζc1
2 , the droplet remainsstationary (〈V 〉 = 〈Ω〉 = 0, stationary phase). The polarizationfield p inside the droplet, in this stationary state, is slightly twisted(through about one-quarter of a helical pitch). Interestingly, theflow field u outside the droplet forms a pair of counterrotatingvortices (Fig. 3A, Left). Thus, the droplet behaves coherently as asingle, right-handed torque dipole. Similar counterrotating flowshave also been observed in Caenorhabditis elegans embryos (8),possibly indicating that eukaryotic cells have intrinsic chirality.
At higher values of the chiral activity, ζc22 <ζ2 <ζ
c32 , the
droplet acquires both translation and rotation (〈V 〉 > 0 and
Tjhung et al. PNAS | May 2, 2017 | vol. 114 | no. 18 | 4633
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021

A
B
Fig. 3. (A) The fluid velocity u for the stationary phase (Left) and therotating phase (Right) corresponding to Left and Center pictures in Fig. 2B.(B) The time evolution of the angular speed Ω(t) for different values oftorque dipole activity ζ2 (while ζ1 = 0). At some intermediate value ζ2 = 4.71,Ω(t) oscillates at steady state (Movie S2). (The residual small oscillations atζ1 = 5.1 and ζ2 = 5.7 are likely due to wobbles in the moving droplet.)
〈Ω〉 > 0, rotating phase). This rotation is mediated by a bendinstability in p (in contrast to the splay produced by forcedipoles), which causes an asymmetric, counterrotating flow fieldu (Fig. 3A, Right). Meanwhile, the interface of the droplet alsofollows the direction of p, forming a chiral bent shape. The direc-tion of rotation Ω aligns with that of bending (∇×p)×p, that is,perpendicular to the overall polarization p. Also note that in therotating phase, the droplet’s swimming velocity V points roughlyparallel to Ω. Qualitatively, the motion of the droplet is like themotion of a right-handed screw going into a wall (Movie S1). (Itis also like the motion when the screw is extracted from the wall,because both V and Ω are then reversed.) Here, therefore thechirality of the trajectory is determined by the underlying micro-scopic chirality.
There also exists a small window at ζc12 < ζ2 < ζc2
2 where thedroplet oscillates between the rotating and the stationary phase(oscillatory phase), corresponding to a subcritical Hopf bifur-cation in dynamical systems (Fig. S1). If we look at the timeevolution of the CM angular speed Ω(t) in this window (e.g.,ζ2 = 4.71 in Fig. 3B), Ω(t) oscillates between some large values(rotating) and small values (approximately stationary). Qualita-tively, the droplet remains stationary for some time and then sud-denly rotates for awhile, then becomes stationary again and so on(Movie S2).
Finally, at much higher values of activity ζc32 < ζ2, the fluid
flow inside and outside the droplet becomes turbulent with largeinterfacial fluctuations (turbulent phase in Fig. 2A).
The transition between the quiescent and the spontaneouslyrotating droplet is governed by the dimensionless parameterζ2 = ζ2R/κ, which measures the ratio between active forces, due
to the torque dipole, and elastic forces. As a result, the criticaltorque threshold ζc1
2 scales with R differently with respect to thecritical force dipole discussed in Force Dipoles Only. A distinctimportant quantity is the capillary number Ca2 = ζ2/γ, where γis the surface tension of the droplet: When this number is large,active torques lead to a change in droplet shape. The analogouscapillary number relevant for force dipoles is Ca1 = ζ1R/γ.
Force and Torque Dipoles Combined. Now, we consider the effectsof both force and torque dipoles being simultaneously present inan active droplet, which is the generic case. Fig. 4A shows thephase diagram in the ζ1–ζ2 parameter space (assuming both ζ1and ζ2 are positive as before). From this phase diagram, we candistinguish several different dynamical regimes or “phases” forthe behavior of the droplet at steady state. First, in the lower left-hand corner in Fig. 4A, we have a stationary phase (labeled IV),where the droplet remains stationary without any translational orrotational motion. This droplet has a lentil shape similar to thatdepicted in Fig. 2A, Left (also ref. 11). On the right-hand side ofthe phase diagram in Fig. 4A, we have another stationary phase(labeled V) with an aster defect at the center of the droplet, nowsimilar to that depicted in Fig. 2A, Right. In these two limitingregimes, the chiral activity barely changes the phases seen for apurely contractile system.
Next, we observe two helical phases (labeled I and II) in thephase diagram. In these two phases, the droplet swims in a heli-cal trajectory at steady state (see Fig. 4C for a typical helicaltrajectory). As announced earlier, we can have both a right-handed helix (phase I) and a left-handed helix (phase II) on thesame phase diagram, even though the torque dipole activity ζ2
0
1
2
3
4
5
6
7
8
0 5 10 15 20 25 30 35 40 45
(T
orqu
e di
pole
act
ivity
)
1 (Force dipole activity)
A
B C
Fig. 4. (A) Phase diagram in the full ζ1–ζ2 parameter space can be dividedinto several different phases. Note that there are two helical swimmingphases: right-handed (phase I) and left-handed (phase II) helix. (B) The typ-ical time-averaged CM velocity vector 〈V〉 and angular velocity vector 〈Ω〉for phase I (Left), phase II (Center), and phase III (Right). (C) The typicalright-handed helical trajectory corresponding to phase I (parameters used:ζ1 = 10.8 and ζ2 = 7.8; the lengths are in units of the droplet’s radius).
4634 | www.pnas.org/cgi/doi/10.1073/pnas.1619960114 Tjhung et al.
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021

PHYS
ICS
A B
Fig. 5. A purely right-handed microscopic chirality can give rise to bothright-handed and left-handed macroscopic motion due to two differentways the polarization field p (red arrows) is arranged inside the droplet.(A) Right-handed helix: Bend deformation dominates. The green arrowsindicate two possible directions for V. (B) Left-handed helix: Splay defor-mation dominates. Similarly, the blue arrows indicate two choices of manypossible directions for Ω.
is always positive or right-handed. In the case of a right-handedhelix (phase I), the angle between V and Ω is always less than 90
(Fig. 4B, Left). On the other hand for a left-handed helix (phaseII), the angle between V and Ω is always larger than 90 (Fig.4B, Center). These identifications swap over if the chiral activityparameter ζ2 is reversed in sign. Among these helical trajectoriesare screw-like ones in which V and Ω are almost parallel, but alsoothers where the angle between these is large.
The presence of both right-handed and left-handed helicalmotion from a purely right-handed microscopic chirality can nowbe understood as follows. The right-handed helix (phase I) ariseswhen the torque dipole is large and the force dipole weak. Toexplain it, consider adding a small force dipole perturbation tothe purely torque dipolar rotating phase in Fig. 2B, Center. Thecontractile perturbation induces a translational velocity along(∇.p)p∼ ± p as stated previously; because of the preexistingbending created by the chiral activity (Fig. 5A), the resultingangle between V and Ω will be less than 90. Conversely, forthe left-handed helix (phase II), consider adding a small torquedipole perturbation to the purely contractile linear-swimmingphase in the middle of Fig. 2A. The torque dipole now inducesan angular velocity perpendicular to the overall polarization p(Fig. 5B). Because of the preexisting splay in the contractileswimming state, the resulting angle between V and Ω will belarger than 90. We see that the left–right helix distinction isdue to having very different configurations of the polarizationfield p inside the droplet, depending on the outcome of a com-petition between chiral and contractile activity. In the case ofphase I (large chirality), bend deformation dominates, whereasin the case of phase II (large contractility), splay dominates. Con-sequently phase I droplets also have quite distinct morphologyfrom phase II droplets, with chiral bent shape for the former anda dimple for the latter (Fig. 5 A and B, respectively).
We emphasize again that our study addresses the effects ofnonzero chirality at microscopic scales on macroscopic droplettrajectories. Similar, macroscopically helical motions can also beobtained via spontaneous symmetry breaking (SSB) from zeromicroscopic chirality. The two cases are easily distinguished,however, because in the SSB scenario each swimmer choosesbetween left and right helicity at random; both states exist atthe same point in the phase diagram. In our case, left and rightmacroscopic helicities are located at different state points.
In the phase diagram in Fig. 4A, we also have a linear-swimming phase (labeled III), where the droplet swims in anearly straight line, similar to the picture in Fig. 2A, Center. Inthis phase, Ω is∼0 (within numerical precision±0.01) whereas V
is approximately constant at steady state (Fig. 4B, Right); becauseof small residual helicity, this is separated from phase II by acrossover rather than a sharp transition line. On the ζ2 axis inthe phase diagram, we have the oscillatory phase (labeled VI),where V (t) and Ω(t) oscillate at steady state as discussed above.Intriguingly, we also discover a run-and-tumble phase (labeledVII), where the droplet is observed to swim in a straight line forsome period (run) and then abruptly changes its direction (tum-ble) before swimming again in a straight line and so on (MovieS3). Note that due to the absence of noise in our system, at eachtumble phase, the droplet changes its direction at a fixed angle.[This is similar to a zig–zag motion in a particle model (30).] Therun-and-tumble motion, again, arises here as an example of oscil-latory behavior: It requires simultaneous presence of force andtorque dipoles, as well as proximity to the transition between sta-tionary and helical phase.
DiscussionWe have shown within a simplified model how the microscopicchirality of active particles (such as actin filaments or bacteria)can translate into a macroscopically chiral motion at the scaleof a droplet. Whereas other models for helical droplet swimminghave been proposed based on particle dynamics (e.g., refs. 31 and32), the current one is the simplest to our knowledge based onactive gel theory. In our framework, helical trajectories can arisefor swimming droplets from a combination of contractile and chi-ral activities. A right-handed microscopic chirality does not nec-essarily translate into a right-handed helical trajectory, becausethe macroscopic helicity is mainly controlled by the pattern of thepolarization field p (describing the average alignment of parti-cles) within the droplet (Fig. 5). This configuration is determinedby a contest between contractility and chirality, not between twodifferent sources of chirality. Whereas our study addresses anactive gel droplet, the helical swimming mode we found may berelevant to understand some features of the 3D swimming of pro-tozoans such as Toxoplasma, whose motility mechanism is stillelusive (33). Notably, such organisms often display a mismatchbetween microscopic and macroscopic chirality not unlike theone we discovered here.
Interestingly, we are also able to obtain an oscillatory statewithout any built-in dynamical oscillator in our model. Thisoscillatory behavior is also observed in simple models of cellcrawling (12) and actin cortex (34). This illustrates how sim-ple physical mechanisms can give rise to oscillatory behaviorin biological systems without the need of an internal chemicaloscillator.
In conclusion, hydrodynamic instabilities in a droplet ofgeneric chiral active fluids can lead to a striking variety of swim-ming motilities in 3D. It would be of interest to search for bio-logical analogues of these mechanisms, which rely on the cou-pling between orientational order and active torques and forces.This work has focused on the effects of chirality on swimmingthrough a bulk medium rather than crawling across a solid sur-face. Because molecular chirality is present at some level in allcell types and microorganisms, it would be very interesting tolook for its signatures in crawling processes also.
Materials and MethodsWe introduce a free-energy functional F[φ, p] to stabilize a droplet of activepolar phase (φ ' |p| ' 1) in the bulk of a passive isotropic phase (φ'|p| ' 0),
F[φ, p] =
∫dr
aφ2(φ− 1)2+
k
2|∇φ|2
− α
(φ−
1
2
)|p|2 +
α
4|p|4 +
κ
2(∇p)
2
, [3]
where a, k, α, and κ are positive constants. a and k are related to the sur-
face tension γ and interfacial width ` via γ= 83
√ka and `=
√k2a . κ is the
Tjhung et al. PNAS | May 2, 2017 | vol. 114 | no. 18 | 4635
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021

(single, for simplicity) elastic constant controlling bend, twist, and splaydeformation in p.
The dynamics of φ(r, t) follow a conserved diffusion–reaction equation,∂φ
∂t+∇ ·
(φu−M∇
δF
δφ
)= 0, [4]
where M is the mobility. The dynamics of p(r, t) are similar to the Leslie–Ericksen equation for liquid crystals (20),
∂p
∂t+ u · ∇p = −Ω · p + ξv · p−
1
Γ
δF
δp, [5]
where v and Ω are the symmetric and antisymmetric parts of the velocitygradient tensor ∂αuβ , respectively. Here ξ is the shear-aligning parame-
ter (ξ > 1 for shear-aligning rod-shaped particles) and Γ is the relaxationtimescale for p. Finally, the equation for u(r, t) is described by the Stokesequation (main text). The form of the passive elastic stress σp in the Stokes
equation is again similar to nematic liquid crystals (with h =− δFδp ) (20):
σpαβ =
1
2(pαhβ − pβhα)−
ξ
2(pαhβ + pβhα)− κ∂αpγ∂βpγ . [6]
These equations have been used in many other studies (1, 2, 4).
ACKNOWLEDGMENTS. We thank R. Adhikari, E. Lauga, C. A. Whitfield, andG. E. Ward for illuminating discussions. M.E.C. holds a Royal Society ResearchProfessorship.
1. Marchetti MC, et al. (2013) Hydrodynamics of soft active matter. Rev Mod Phys85:1143–1189.
2. Zhou S, Sokolov A, Lavrentovich OD, Aranson IS (2014) Living liquid crystals. Proc NatlAcad Sci USA 111:1265–1270.
3. Angelini TE, et al. (2011) Glass-like dynamics of collective cell migration. Proc NatAcad Sci USA 108:4714–4719.
4. Kruse K, Joanny JF, Julicher F, Prost J, Sekimoto K (2005) Generic theory of active polargels: A paradigm for cytoskeletal dynamics. Eur Phys J E Soft Matter 16:5–16.
5. Poincloux R, et al. (2011) Contractility of the cell rear drives invasion of breast tumorcells in 3D matrigel. Proc Natl Acad Sci USA 108:1943–1948.
6. Leung JM, Rould MA, Konradt C, Hunter CA, Ward GE (2014) Disruption of TgPHIL1alters specific parameters of Toxoplasma gondii motility measured in a quantitative,three-dimensional live motility assay. PLoS One 9:e85763.
7. Kan A, et al. (2014) Quantitative analysis of Plasmodium ookinete motion in threedimensions suggests a critical role for cell shape in the biomechanics of malaria para-site gliding motility. Cell Microbiol 16(5):734–750.
8. Naganathan SR, Furthauer S, Nishikawa M, Julicher F, Grill SW (2014) Active torquegeneration by the actomyosin cell cortex drives left-right symmetry breaking. Elife3:e04165.
9. Sanchez T, Chen DTN, DeCamp SJ, Heymann M, Dogic Z (2012) Spontaneous motionin hierarchically assembled active matter. Nature 491:431–434.
10. Keber FC, et al. (2014) Topology and dynamics of active nematic vesicles. Science345:1135–1139.
11. Tjhung E, Marenduzzo D, Cates ME (2012) Spontaneous symmetry breaking in activedroplets provides a generic route to motility. Proc Natl Acad Sci USA 109:12381–12386.
12. Tjhung E, Tiribocchi A, Marenduzzo D, Cates ME (2015) A minimal physical modelcaptures the shapes of crawling cells. Nat Commun 6:5420.
13. Nichols BA, Chiappino ML (1987) Cytoskeleton of Toxoplasma gondii. J Protozool34:217–226.
14. MBInfo Contributors (2013) Structure of an actin filament showing the barbed(or plus) and pointed (or minus) ends. Available at mbinfo.mbi.nus.edu.sg/figure/1379651820893/. Accessed October 21, 2016.
15. Kruger C, Klos G, Bahr C, Maass CC (2016) Curling liquid crystal microswimmers: Acascade of spontaneous symmetry breaking. Phys Rev Lett 117:048003.
16. Khoromskaia D, Alexander GP (2017) Vortex formation and dynamics of defects inshells of active nematics. arXiv:1601.00755.
17. Kirkegaard JB, Marron AO, Goldstein RE (2016) Motility of colonial choanoflagellatesand the statistics of aggregate random walkers. Phys Rev Lett 116:038102.
18. Schwarz-Linek J, et al. (2012) Phase separation and rotor self-assembly in active par-ticle suspensions. Proc Natl Acad Sci USA 109:4052–4057.
19. Depue RH, Rice RV (1965) F-actin is a right-handed helix. J Mol Biol 12:302–303.20. DeGennes PG,Prost J (1995) The Physics of Liquid Crystals (Clarendon, Oxford, United
Kingdom).21. Hatwalne Y, Ramaswamy S, Rao M, Simha RA (2004) Rheology of active-particle sus-
pensions. Phys Rev Lett 92:118101.22. Furthauer S, Strempel M, Grill SW, Julicher F (2012) Active chiral fluids. Eur Phys J E
Soft Matter 35:89.23. Ghose S, Adhikari R (2014) Irreducible representations of oscillatory and swirling
flows in active soft matter. Phys Rev Lett 112:118102.24. Pak OS, Lauga E (2014) Generalized squirming motion of a sphere. J Eng Math 88:
1–28.25. Cates ME, Henrich O, Marenduzzo D, Stratford K (2009) Lattice Boltzmann simulations
of liquid crystalline fluids: Active gels and blue phases. Soft Matter 5:3791–3800.26. Denniston C, Marenduzzo D, Orlandini E, Yeomans JM (2004) Lattice Boltzmann algo-
rithm for three-dimensional liquid-crystal hydrodynamics. Philos Trans A Math PhysEng Sci 362:1745–1754.
27. RJ Hawkins, et al. (2011) Spontaneous contractility-mediated cortical flow gen-erates cell migration in three-dimensional environments. Biophys J 101:1041–1045.
28. Shao D, Rappel W-J, Levine H (2010) Computational model for cell morphodynamics.Phys Rev Lett 105:108104.
29. Ziebert F, Aranson IS, (2013) Effects of adhesion dynamics and substrate complianceon the shape and motility of crawling cells. PLoS One 8:e64511.
30. Tarama M, Ohta T (2016) Reciprocating motion of active deformable particles. Euro-phys Lett 114:30002.
31. Hiraiwa T, Shitara J, Ohta T (2011) Dynamics of a deformable self-propelled particlein three dimensions. Soft Matter 7:3083–3086.
32. Yamamoto T, Sano M (2016) Chirality-induced helical self-propulsion of cholestericliquid crystal droplets. arXiv:1604.00298.
33. Egarter S, et al. (2014) The toxoplasma Acto-MyoA motor complex is important butnot essential for gliding motility and host cell invasion. PLoS One 9:e91819.
34. Whitfield CA, Hawkins RJ (2016) Immersed boundary simulations of active fluiddroplets. PLoS One 11:e0162474.
4636 | www.pnas.org/cgi/doi/10.1073/pnas.1619960114 Tjhung et al.
Dow
nloa
ded
by g
uest
on
Aug
ust 1
1, 2
021