Embed Size (px)
Citation preview
Continuous-TimeHybridComputationwithProgrammable
Nonlinearities
ColumbiaUniversityNewYork,NYUSA
NingGuo,Yipeng Huang,TaoMai,Sharvil Patil,ChiCao,Mingoo Seok,Simha Sethumadhavan,andYannis Tsividis
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 1
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 2
CTHYBRIDCOMPUTER
t
t0 0
111
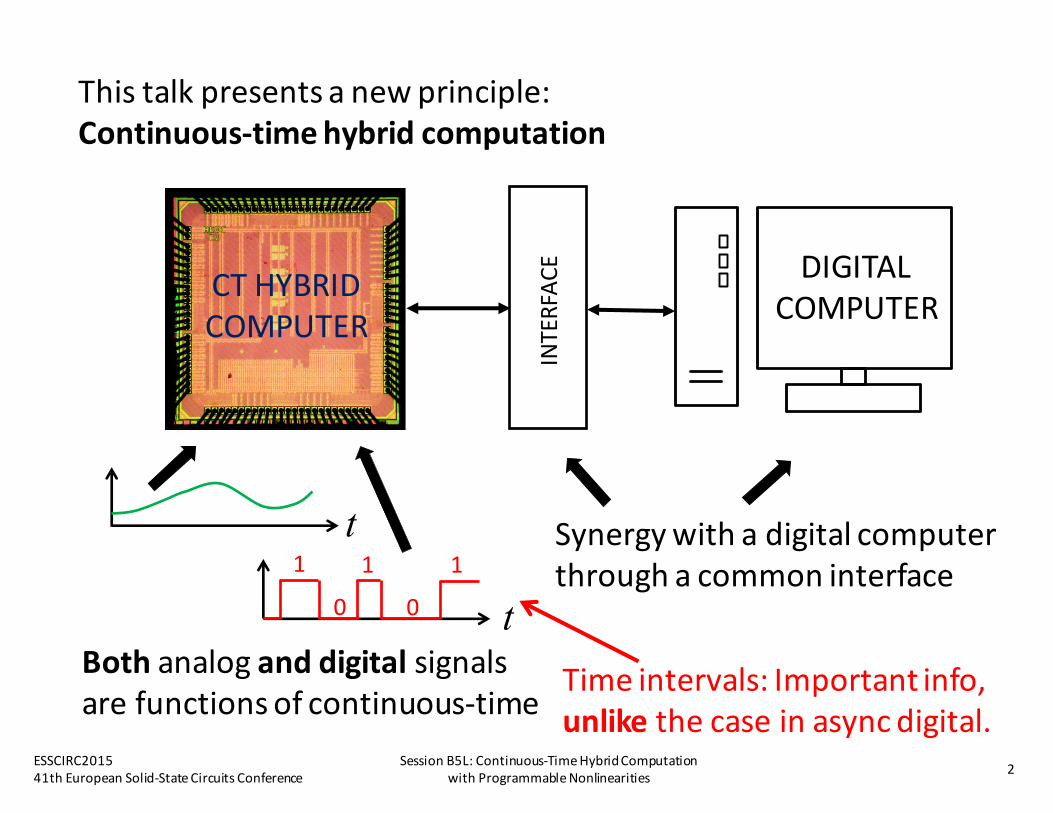
Both analoganddigitalsignalsarefunctionsofcontinuous-time
Thistalkpresentsanewprinciple:Continuous-timehybridcomputation
DIGITALCOMPUTER
INTERFAC
ESynergywithadigitalcomputerthroughacommoninterface
Timeintervals:Importantinfo,unlike thecaseinasync digital.
Outline1. Backgroundandmotivation
2. Mathoperations
3. Systemarchitecture
4. Circuitdesign
5. Measurementresults
6. Conclusions
3ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities
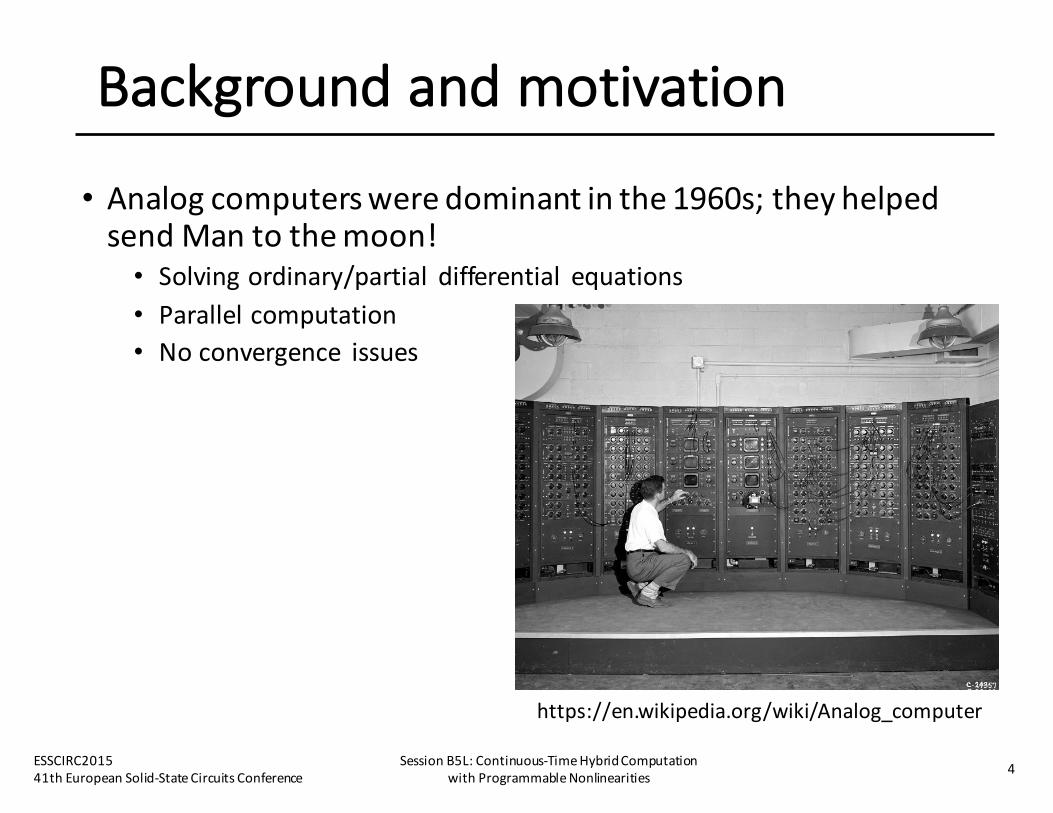
Backgroundandmotivation
• Analogcomputersweredominantinthe1960s;theyhelpedsendMantothemoon!• Solvingordinary/partial differential equations• Parallelcomputation• Noconvergence issues
4ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities
https://en.wikipedia.org/wiki/Analog_computer
Backgroundandmotivation
• Analogcomputerswereabandonedinthe1960sand1970s,whiletheywerestillusingthetechnologyyousawonthepreviousslide.
5ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities
[1]G.Cowanetal.,ISSCC2005
• TheirpotentialinmodernVLSItechnologywasnotconsidereduntilrecently[1].
• ItwasshownthatVLSIanalogcomputersaresuitablefor:• Low-power, self-contained approximatecomputation• Speed-up ofdigitalcomputation throughco-processing.
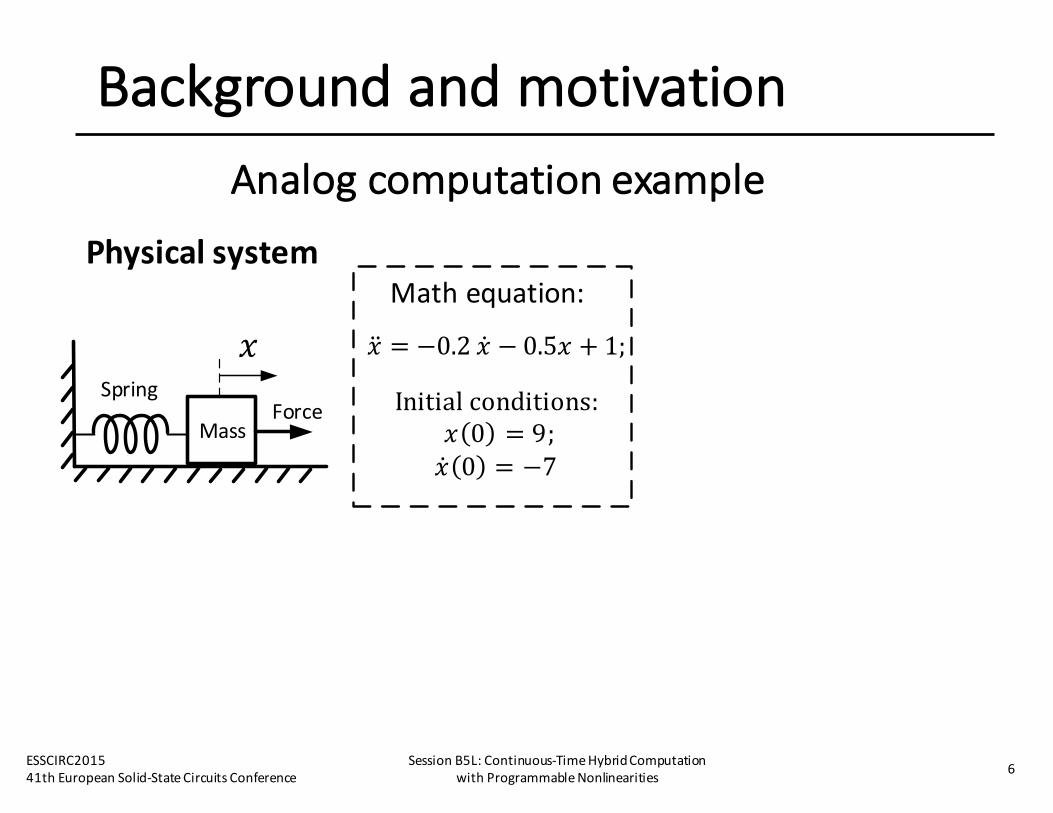
�̈� = −0.2�̇� − 0.5𝑥 + 1;
Mathequation:
Initialconditions:𝑥 0 = 9;�̇� 0 = −7
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 6
BackgroundandmotivationAnalogcomputationexample
𝑥
Physicalsystem
Mass
Spring∫ ∫
Force

Mass
Spring∫ ∫
Force
Physicalsystem
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 7
BackgroundandmotivationAnalogcomputationexample
�̇��̈� 𝑥
-0.2
-0.5
1
�̈� = −0.2�̇� − 0.5𝑥 + 1;
Mathequation:
Initialconditions:𝑥 0 = 9;�̇� 0 = −7
𝑥
Electricalsystem
-10
-5
0
5
10
20 40 60
𝑥 (µA)
𝑡 (ms)
Backgroundandmotivation
• Wepresentanewprinciple:continuous-timehybridcomputation• Continuous-time analogcomputation• Continuous-time digitalcomputation
• Comparedtothefullyanalogapproach,thenewapproachresultsin:• Betteraccuracy• Higherprogrammabilityandgenerality
8ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities
NOCLOCK
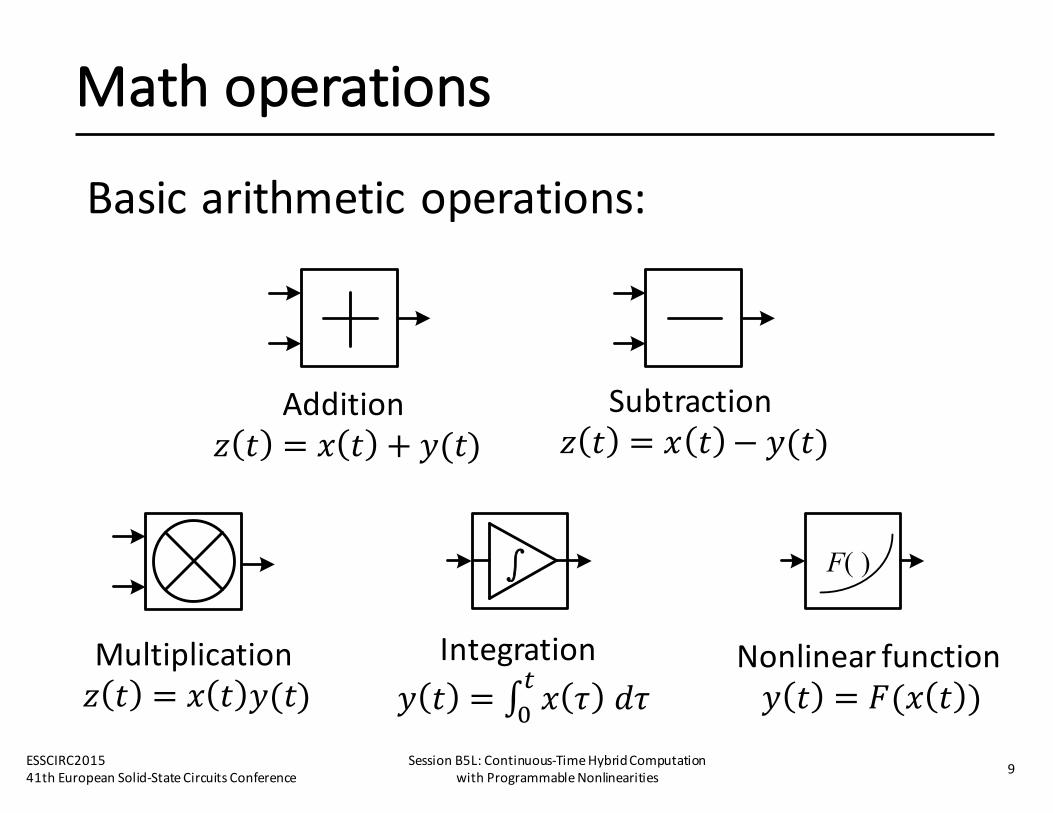
Basicarithmeticoperations:
∫
Addition𝑧 𝑡 = 𝑥 𝑡 + 𝑦(𝑡)
Subtraction𝑧 𝑡 = 𝑥 𝑡 − 𝑦(𝑡)
Multiplication𝑧 𝑡 = 𝑥 𝑡 𝑦(𝑡)
Integration𝑦 𝑡 = ∫ 𝑥 𝜏 𝑑𝜏C
D
Nonlinearfunction𝑦 𝑡 = 𝐹(𝑥 𝑡 )
Mathoperations
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 9
F( )
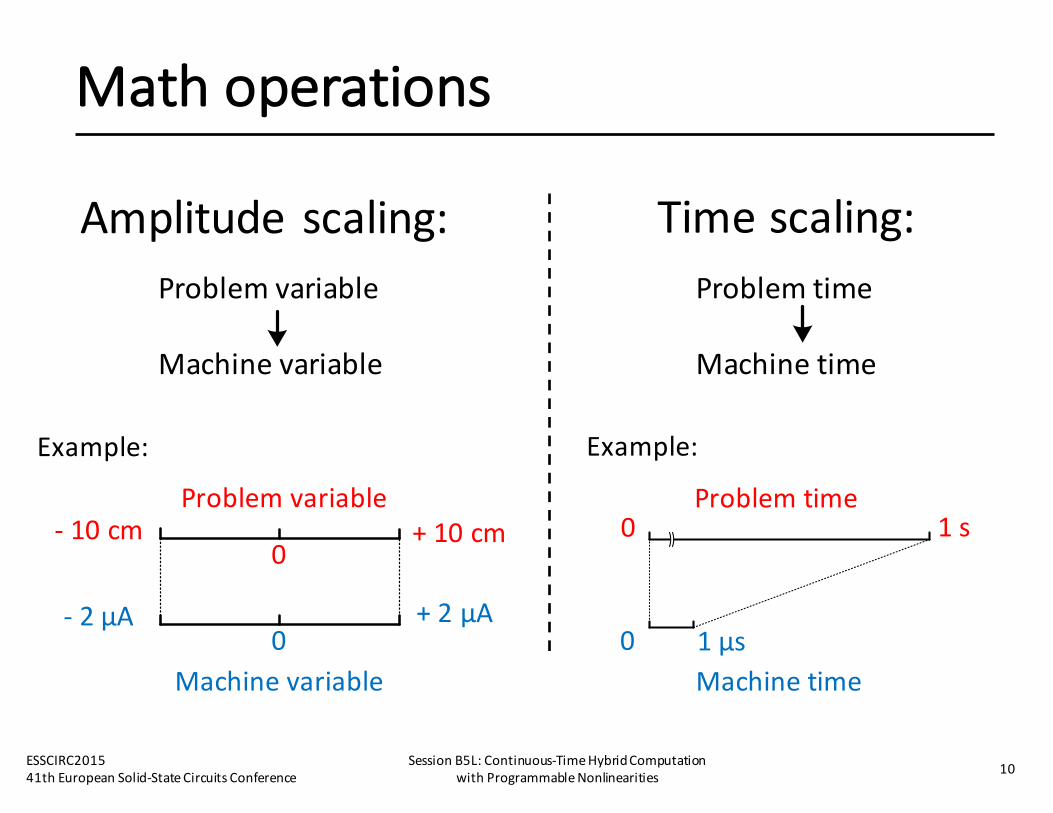
Problemvariable
Machinevariable
Amplitude scaling:
Mathoperations
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 10
Problemvariable- 10cm + 10cm
0
- 2µA + 2µA0
Machinevariable
Example:
Problemtime
Machinetime
Timescaling:
Problemtime
Machinetime
0 1s
0 1µs
Example:
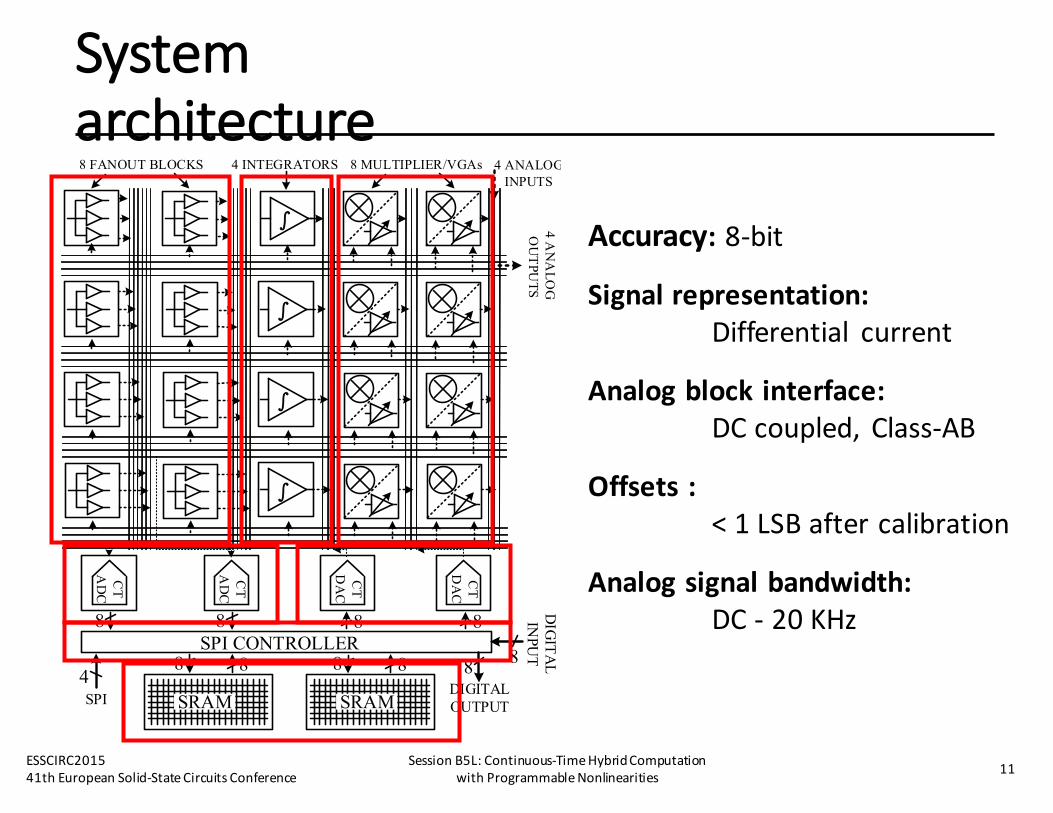
4 AN
ALO
G O
UTPU
TS
8 FANOUT BLOCKS 4 INTEGRATORS 8 MULTIPLIER/VGAs
8 8 8 8
8 8 8 8SPI CONTROLLER
SRAM SRAM
∫
∫
∫
∫
CT
AD
C
CT
DA
C
8 8DIGITAL OUTPUT
DIG
ITAL
INPU
T
4SPI
4 ANALOG INPUTS
CT
AD
C
CT
DA
C
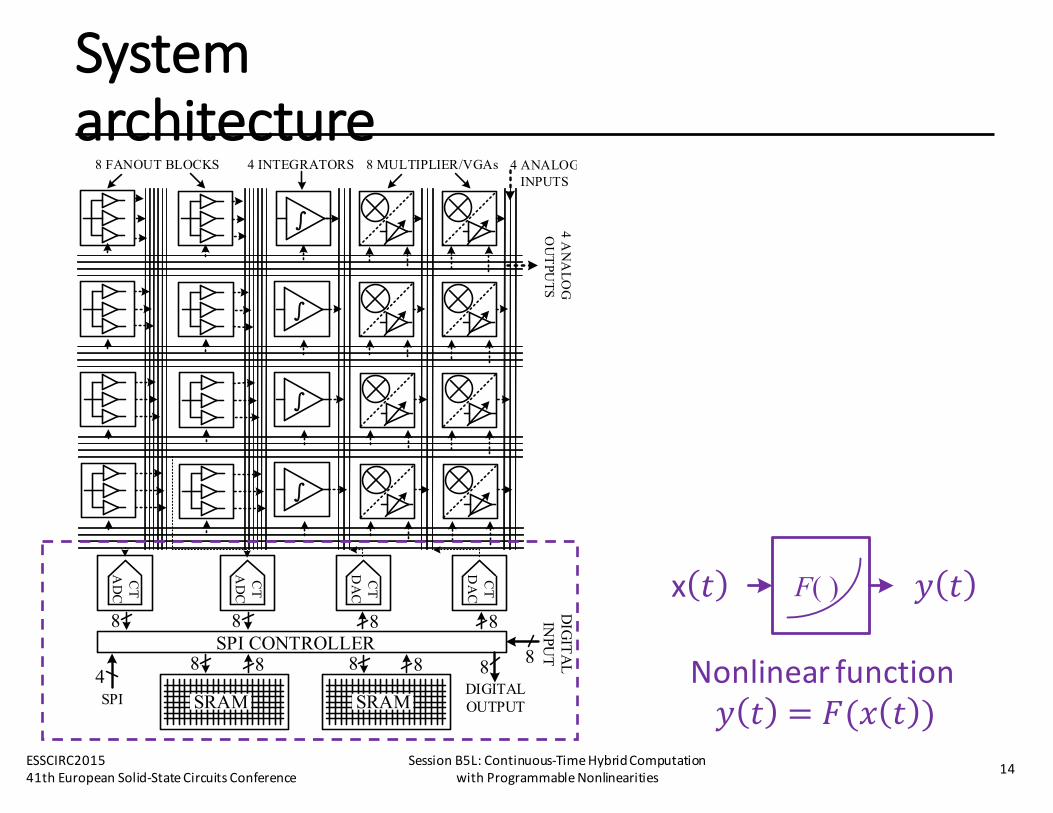
Accuracy: 8-bit
Signalrepresentation:Differential current
Analogblockinterface:DCcoupled,Class-AB
Offsets:<1LSBaftercalibration
Analogsignalbandwidth:DC- 20KHz
Systemarchitecture
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 11
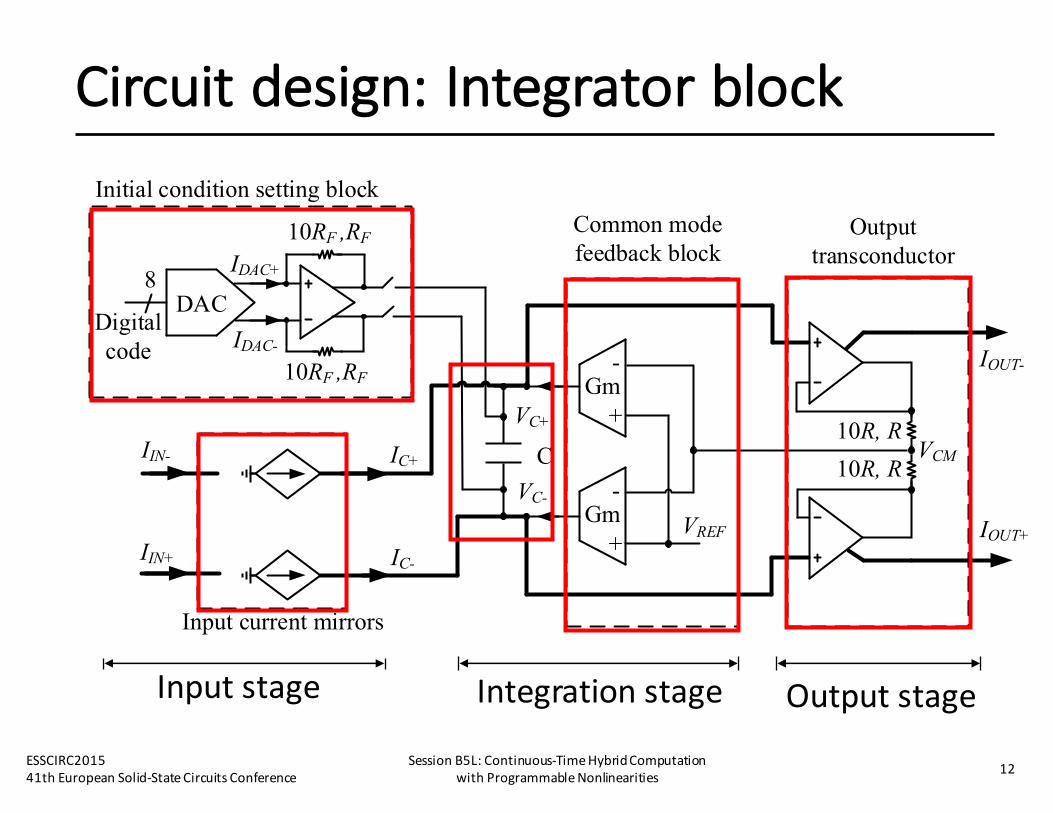
Inputstage Integrationstage Outputstage
Circuitdesign:Integratorblock
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 12
+
-
Gm
8
DACDigital code
Input current mirrors
Output transconductor
C
Initial condition setting block
Common mode feedback block
+
-
Gm
IC+
IC-
IIN-
IIN+
IDAC+
IDAC-
10RF ,RF
10RF ,RF
VC+
VC-
VREF
10R, R10R, R
VCM
IOUT-
IOUT+
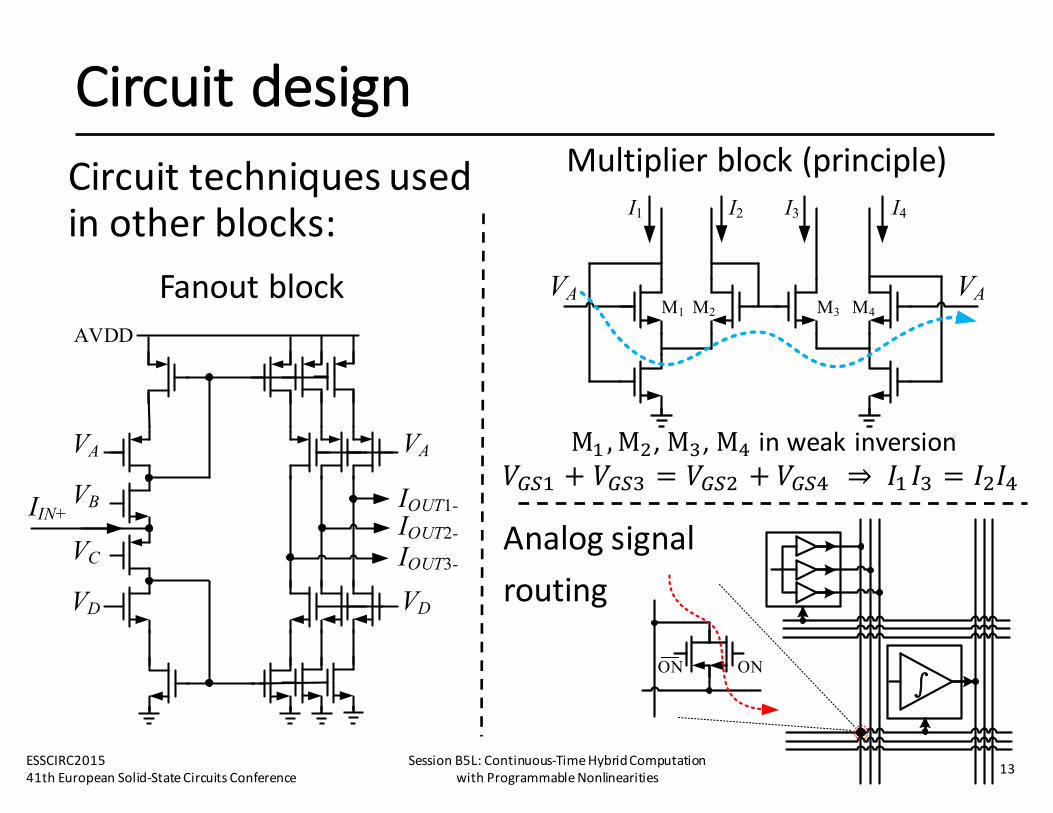
Multiplierblock(principle)
Analogsignalrouting
MG,MI,MJ,MK inweakinversion𝑉MNG + 𝑉MNJ = 𝑉MNI + 𝑉MNK ⇒ 𝐼G 𝐼J = 𝐼I𝐼K
Fanoutblock
CircuitdesignCircuittechniquesusedinotherblocks:
∫ ONON
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 13
M1
VA VA
I1 I2 I3 I4
M2 M3 M4
VA
VB
VC
VD
IIN+ IOUT1-
VA
VD
IOUT2-IOUT3-
AVDD
4 AN
ALO
G O
UTPU
TS
8 FANOUT BLOCKS 4 INTEGRATORS 8 MULTIPLIER/VGAs
8 8 8 8
8 8 8 8SPI CONTROLLER
SRAM SRAM
∫
∫
∫
∫
CT
AD
C
CT
DA
C
8 8DIGITAL OUTPUT
DIG
ITAL
INPU
T
4SPI
4 ANALOG INPUTS
CT
AD
C
CT
DA
C
Systemarchitecture
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 14
Nonlinearfunction𝑦 𝑡 = 𝐹(𝑥 𝑡 )
F( ) 𝑦 𝑡x 𝑡
CT DAC
8
TRIGGER
DATA8
TRIGGER
DATAANALOG
INPUTANALOG OUTPUT
NONLINEAR FUNCTION F( )
CT ADC
SRAM
x F(x)
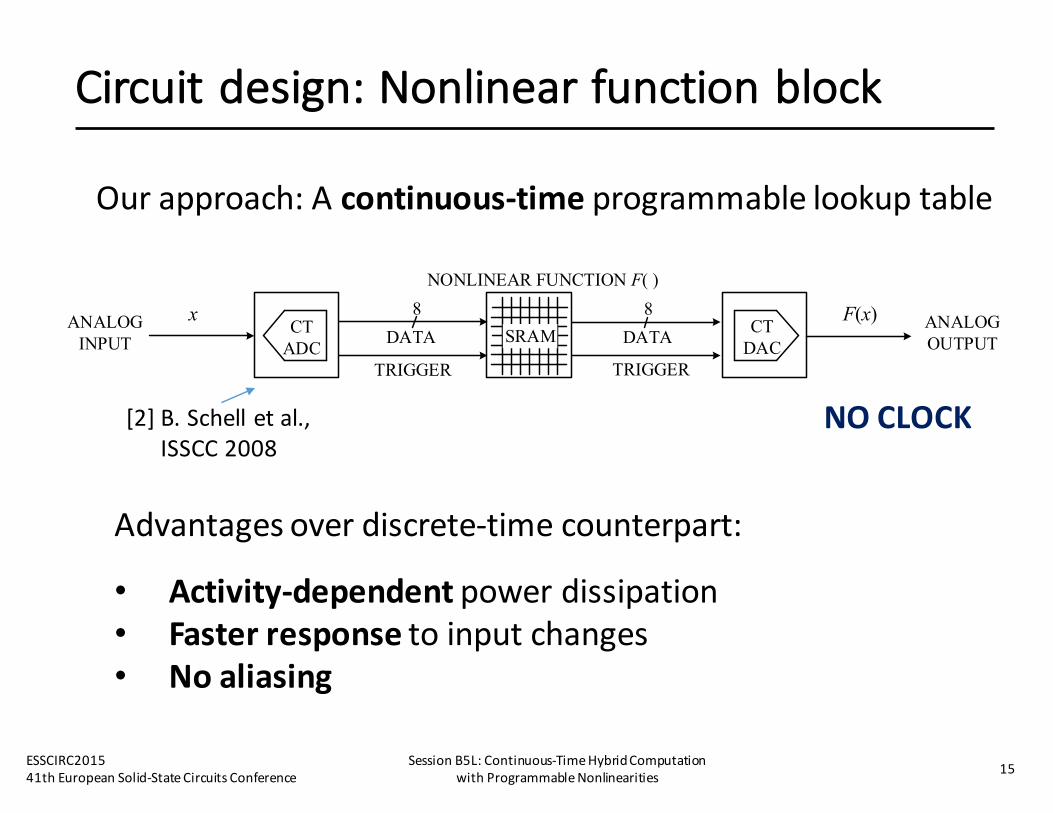
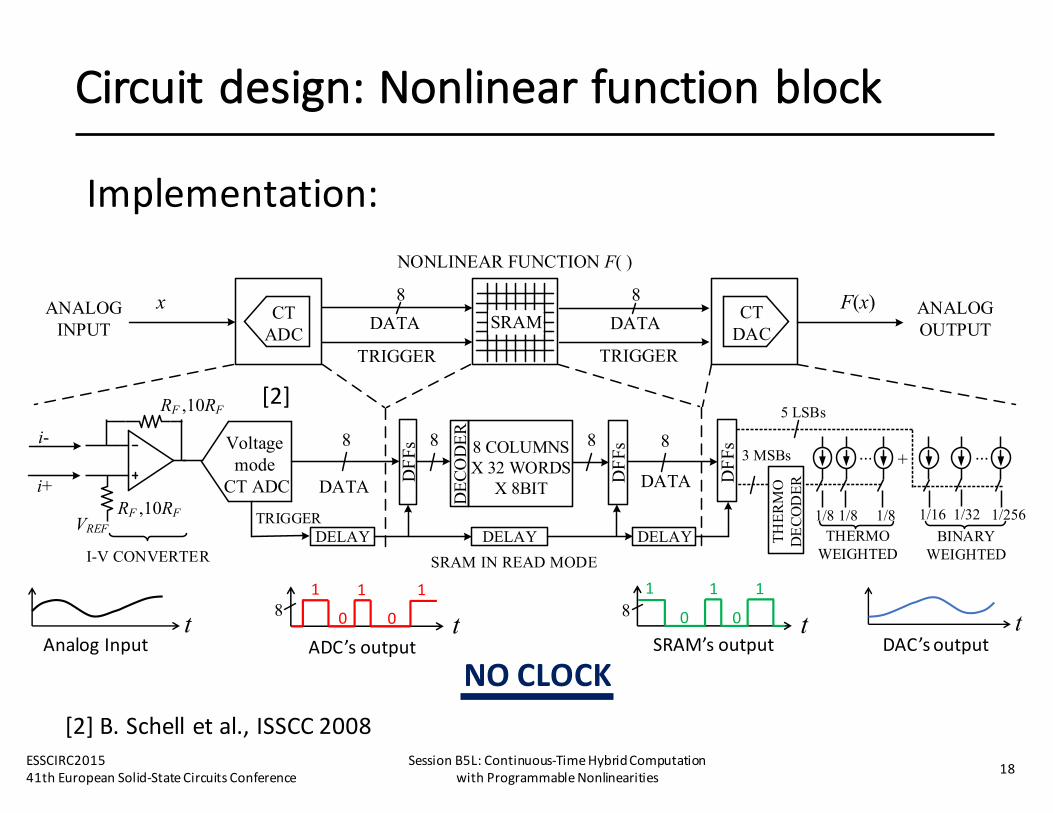
Ourapproach:Acontinuous-time programmablelookuptable
Advantagesoverdiscrete-timecounterpart:
• Activity-dependent powerdissipation• Fasterresponse toinputchanges• Noaliasing
Circuitdesign:Nonlinearfunctionblock
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 15
[2]B.Schelletal.,ISSCC2008
NOCLOCK
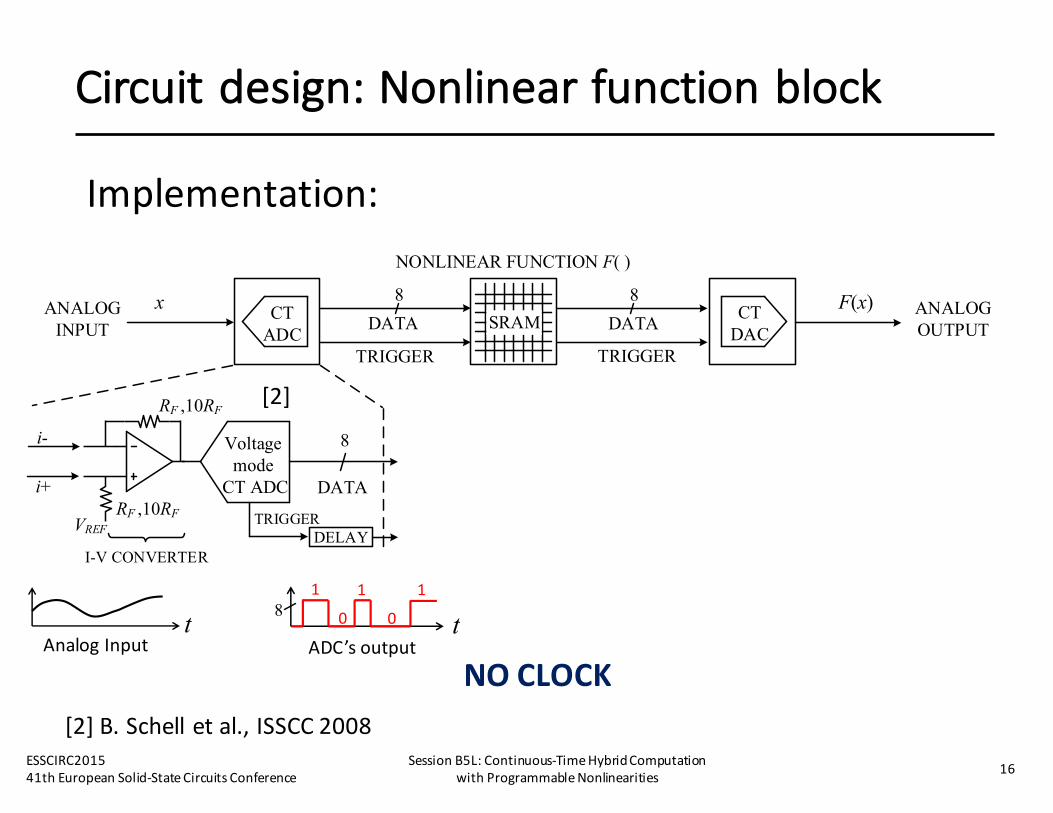
Implementation:
Circuitdesign:Nonlinearfunctionblock
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 16
NOCLOCK[2]B.Schelletal.,ISSCC2008
[2]
CT DAC
8
TRIGGER
DATA8
TRIGGER
DATAANALOG
INPUTANALOG OUTPUT
CT ADC
SRAM
TRIGGER
Voltage mode
CT ADC DATA
8
I-V CONVERTERDELAY
x F(x)
NONLINEAR FUNCTION F( )
i-
i+
RF ,10RF
RF ,10RFVREF
t0 0
1118t
AnalogInput ADC’soutput
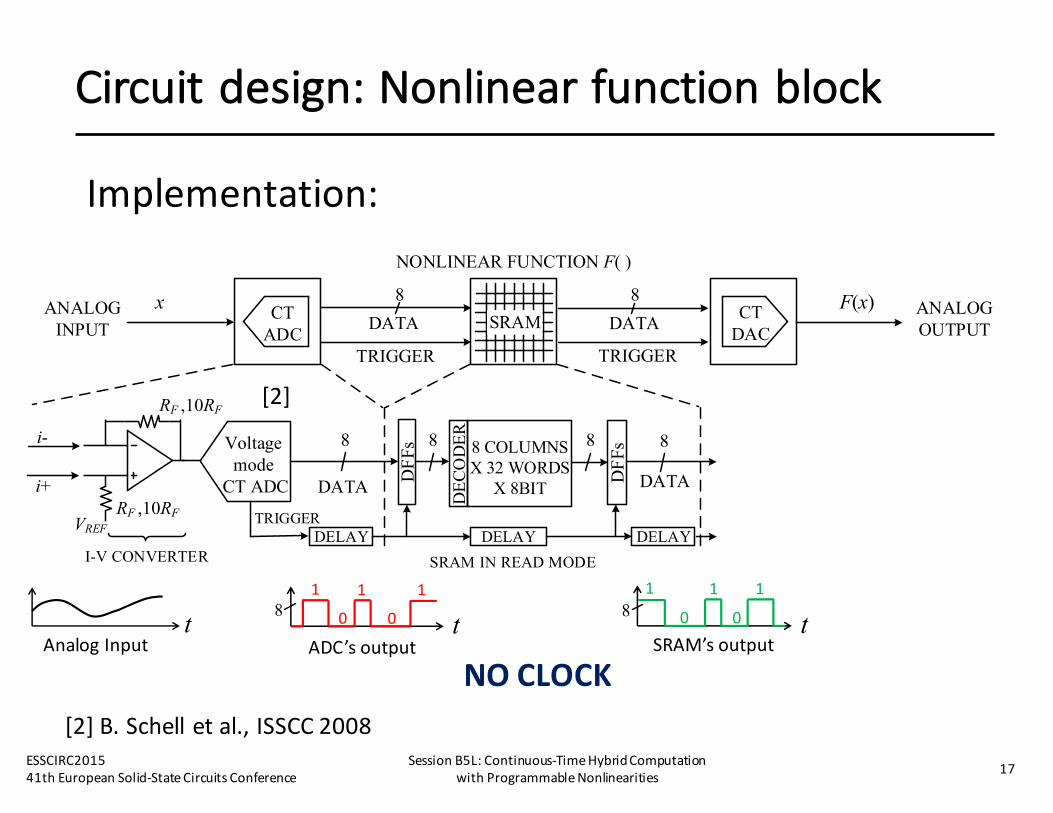
Implementation:
Circuitdesign:Nonlinearfunctionblock
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 17
[2]B.Schelletal.,ISSCC2008
[2]
CT DAC
8
TRIGGER
DATA8
TRIGGER
DATAANALOG
INPUTANALOG OUTPUT
CT ADC
SRAM
TRIGGER
DFF
s
DFF
s8 COLUMNSX 32 WORDS
X 8BIT
88D
ECO
DER
SRAM IN READ MODE
DATA
Voltage mode
CT ADC DATA
8
I-V CONVERTER
8
DELAYDELAY DELAY
x F(x)
NONLINEAR FUNCTION F( )
i-
i+
RF ,10RF
RF ,10RFVREF
t0 0
1118 t0 0
1118t
AnalogInput ADC’soutput SRAM’soutput
NOCLOCK
Implementation:
Circuitdesign:Nonlinearfunctionblock
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 18
[2]B.Schelletal.,ISSCC2008
[2]
CT DAC
8
TRIGGER
DATA8
TRIGGER
DATAANALOG
INPUTANALOG OUTPUT
CT ADC
SRAM
TRIGGER
DFF
s
DFF
s8 COLUMNSX 32 WORDS
X 8BIT
88D
ECO
DER
SRAM IN READ MODE
DATA
Voltage mode
CT ADC DATA
8
I-V CONVERTER
1/8
3 MSBs
DFF
s
1/8
... +
1/161/8 1/32 1/256
...
5 LSBs
THERMO WEIGHTED
BINARY WEIGHTED
THER
MO
D
ECO
DER
8
DELAYDELAY DELAY
x F(x)
NONLINEAR FUNCTION F( )
i-
i+
RF ,10RF
RF ,10RFVREF
t0 0
1118 t0 0
1118 tt
AnalogInput ADC’soutput SRAM’soutput DAC’soutput
NOCLOCK
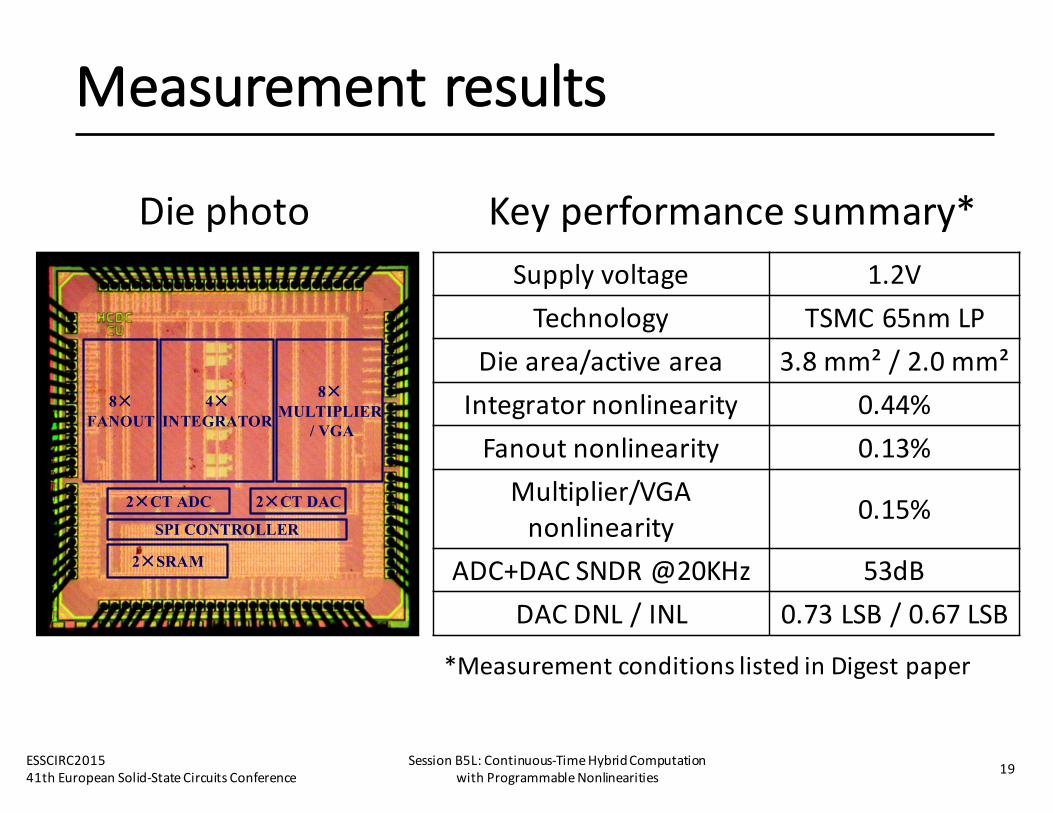
Diephoto Keyperformancesummary*Supply voltage 1.2VTechnology TSMC65nmLP
Diearea/active area 3.8 mm²/2.0mm²Integratornonlinearity 0.44%Fanoutnonlinearity 0.13%Multiplier/VGAnonlinearity 0.15%
ADC+DACSNDR@20KHz 53dBDACDNL/INL 0.73LSB /0.67LSB
*MeasurementconditionslistedinDigestpaper
Measurementresults
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 19
4× INTEGRATOR
8× FANOUT
8× MULTIPLIER
/ VGA
2×CT ADC 2×CT DAC
SPI CONTROLLER
2×SRAM
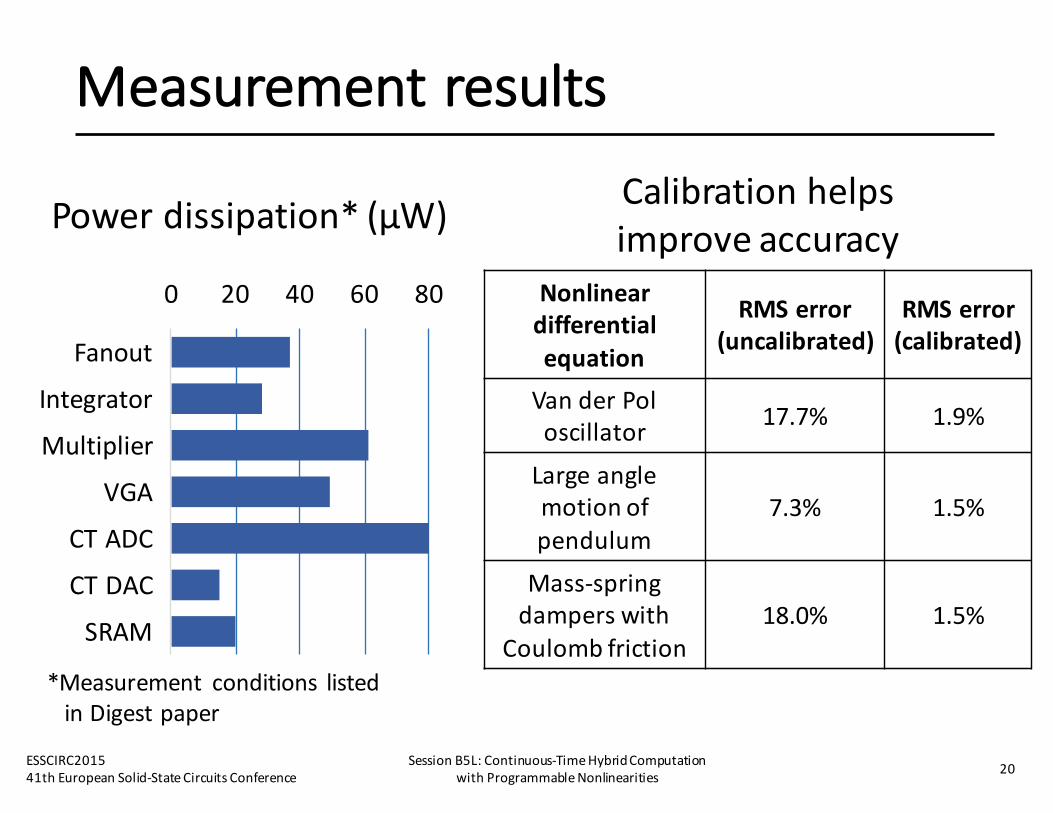
Nonlineardifferentialequation
RMSerror(uncalibrated)
RMSerror(calibrated)
VanderPoloscillator 17.7% 1.9%
Largeanglemotionofpendulum
7.3% 1.5%
Mass-springdamperswith
Coulombfriction18.0% 1.5%
Calibrationhelpsimproveaccuracy
*Measurement conditions listedinDigestpaper
Measurementresults
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 20
0 20 40 60 80
Fanout
Integrator
Multiplier
VGA
CTADC
CTDAC
SRAM
Powerdissipation*(μW)
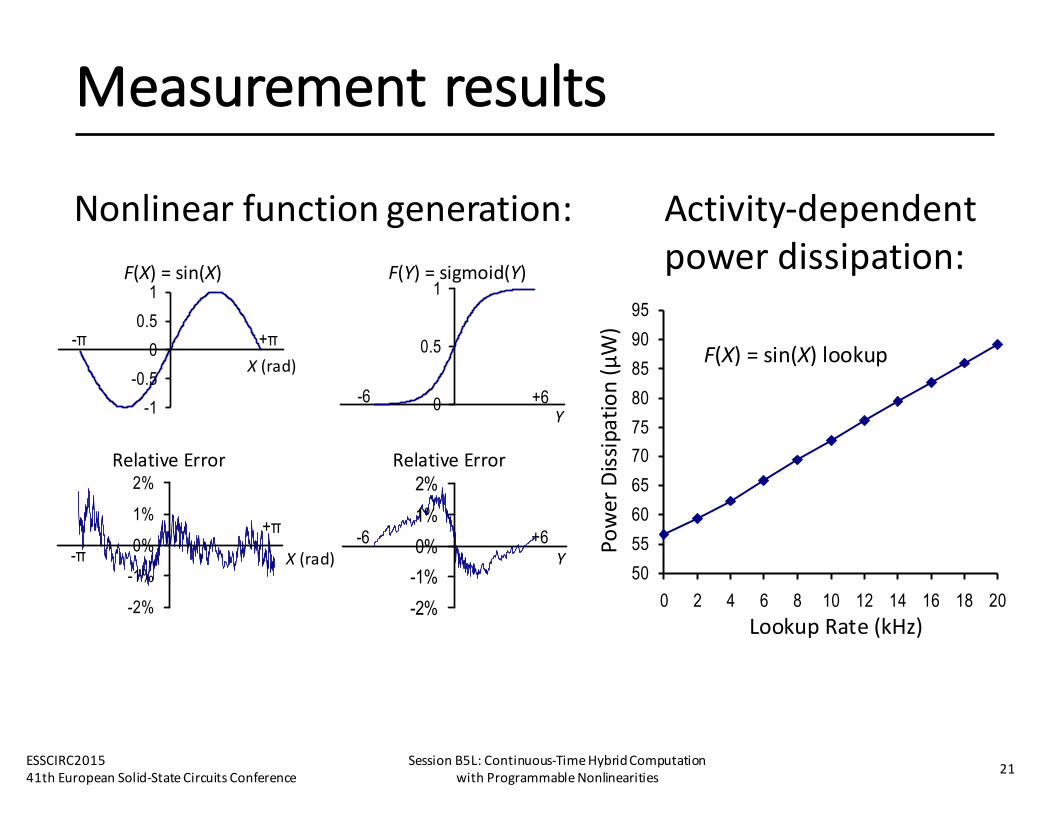
Nonlinearfunctiongeneration: Activity-dependentpowerdissipation:
Measurementresults
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 21
50556065707580859095
0 2 4 6 8 10 12 14 16 18 20LookupRate(kHz)
F(X)=sin(X)lookup
PowerDissipation(μW)
-1-0.5
00.5
1
X(rad)
F(X)=sin(X)
-2%
-1%0%
1%
2%
-π +π
X(rad)-π
+π
Y
F(Y)=sigmoid(Y)
-6 +6
Y-6 +6
0
0.5
1
-2%-1%0%1%2%
RelativeErrorRelativeError
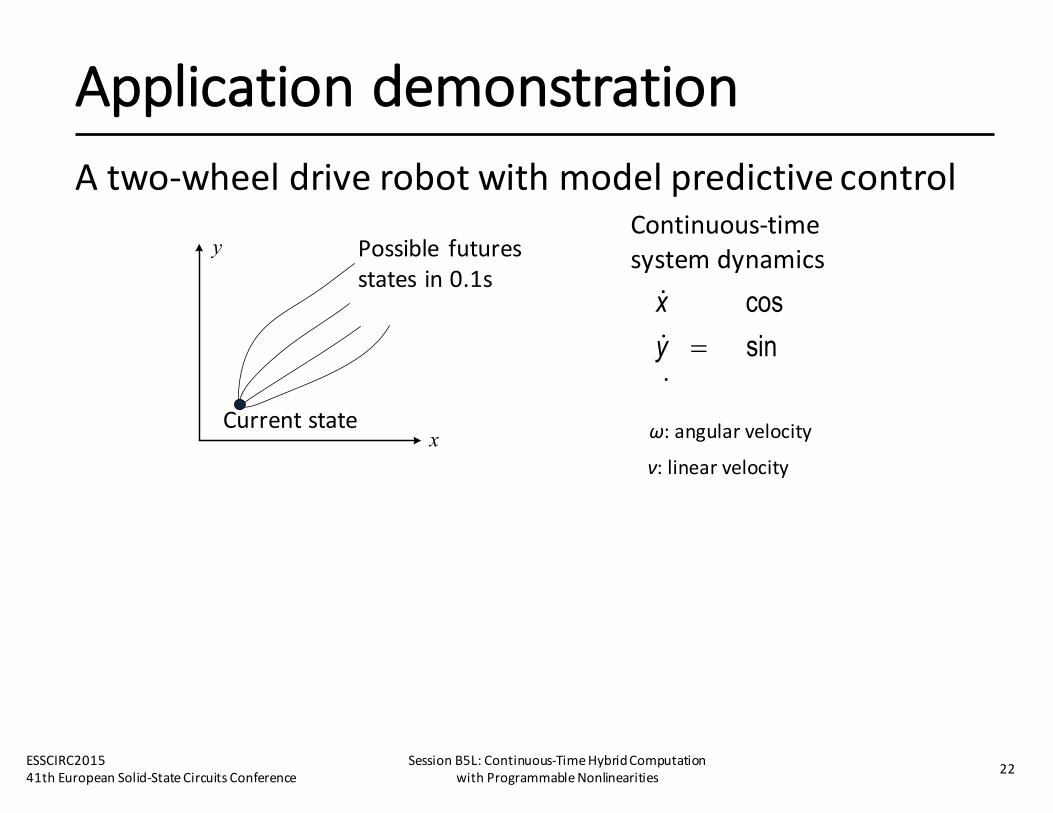
x
y
Atwo-wheeldriverobotwithmodelpredictivecontrol
Currentstate
Possible futuresstates in0.1s
cossin
x
y =
!!!
Continuous-timesystemdynamics
ω:angularvelocity
ν:linearvelocity
Applicationdemonstration
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 22
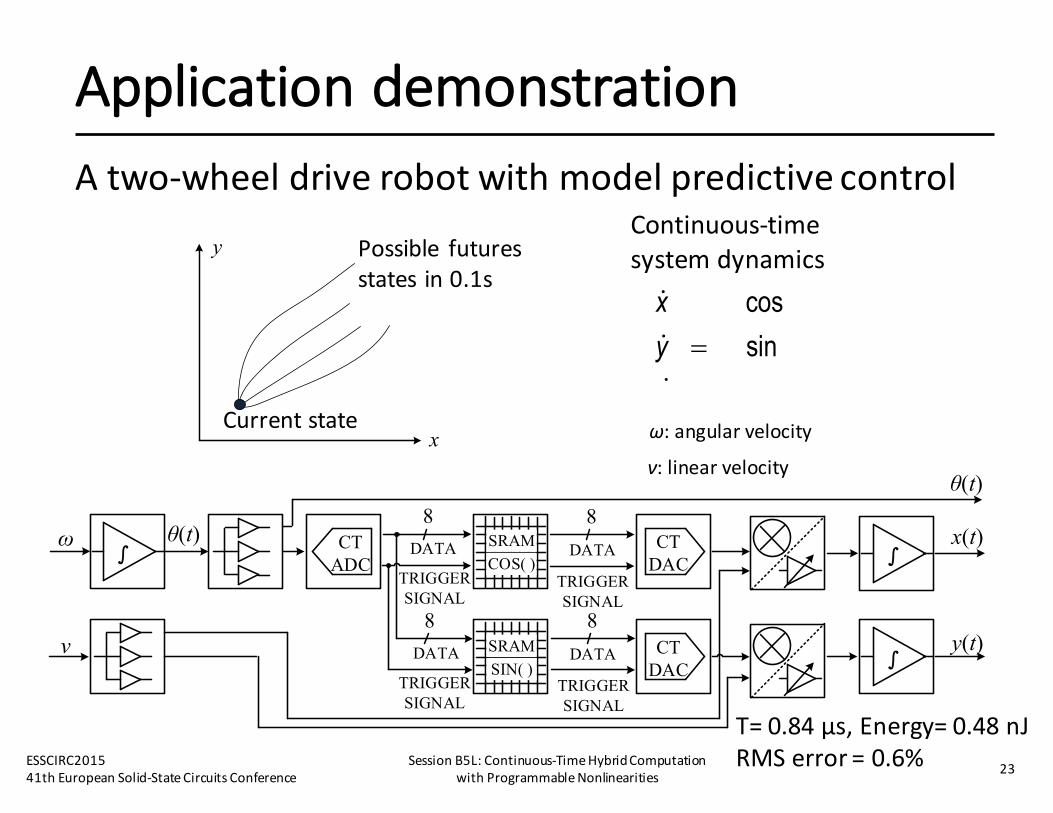
ω
ν
θ(t)
x(t)
y(t)
CT DAC
CT ADC
SRAM8
DATA
TRIGGER SIGNAL
CT DAC
SRAM
COS( )
SIN( )
θ(t)
8DATA
TRIGGER SIGNAL
8DATA
TRIGGER SIGNAL
8DATA
TRIGGER SIGNAL
∫ ∫
∫
Atwo-wheeldriverobotwithmodelpredictivecontrol
Applicationdemonstration
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 23
T=0.84μs,Energy=0.48nJRMSerror=0.6%
x
y
Currentstate
Possible futuresstates in0.1s
cossin
x
y =
!!!
Continuous-timesystemdynamics
ω:angularvelocity
ν:linearvelocity
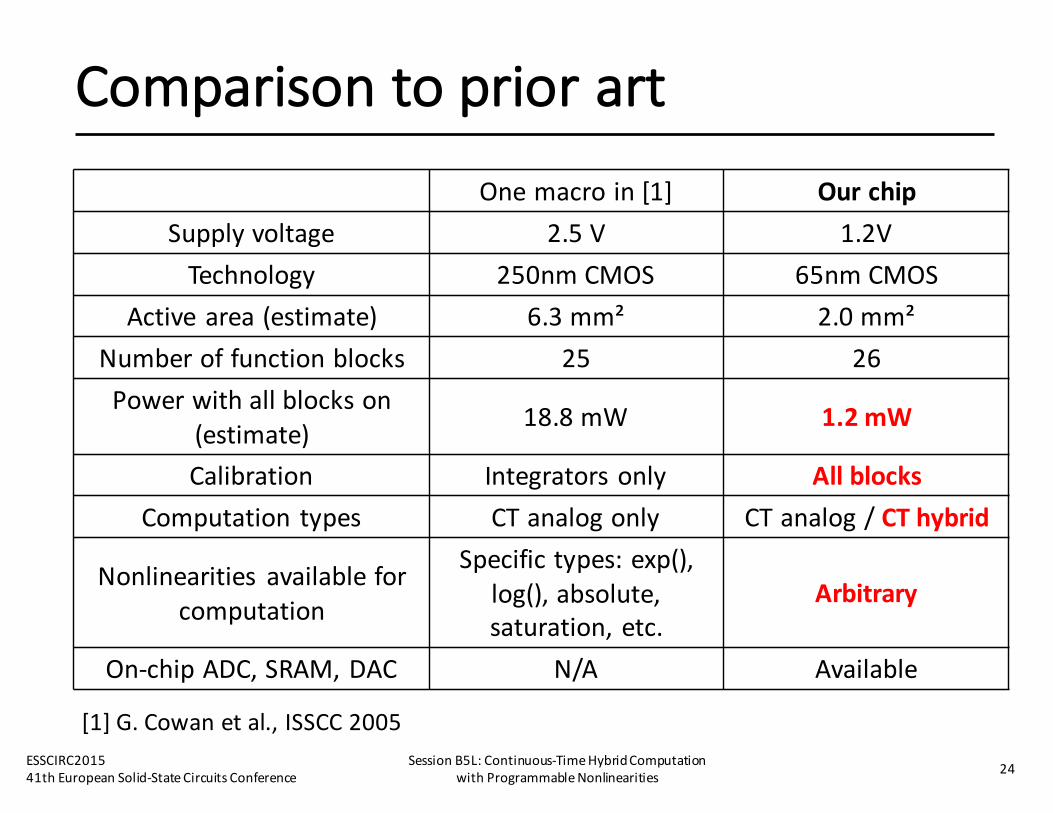
Onemacroin[1] Our chipSupplyvoltage 2.5V 1.2VTechnology 250nmCMOS 65nmCMOS
Active area(estimate) 6.3mm² 2.0mm²Numberoffunctionblocks 25 26Powerwithallblockson
(estimate) 18.8mW 1.2mW
Calibration Integratorsonly AllblocksComputation types CTanalogonly CTanalog/CThybrid
Nonlinearities availableforcomputation
Specifictypes:exp(),log(), absolute,saturation,etc.
Arbitrary
On-chip ADC,SRAM,DAC N/A Available
Comparisontopriorart
[1]G.Cowanetal.,ISSCC2005ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 24
• Wehavepresentedthefirstcontinuous-timehybridcomputingunit.
• Arbitrarynonlinearfunctionsareimplementedbyacontinuous-timehybridarchitecture(ADC+SRAM+DAC).
• Wehaveusedthechiptosuccessfullysolveseveralbenchmarkequationsanddemonstratedtheuseofthechipinaroboticapplication.
• Weexpectthistechniquetofindapplicationsinlow-powerapproximatecomputationandinaccelerationofdigitalcomputation.
Conclusions
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 25
WethankChien-TangHu,Doyun Kim,Jianxun Zhu,Teng Yang,YangXu,YuChenandZhe Caoforvaluablediscussions.
ThisworkhasbeensupportedbyNationalScienceFoundationgrantCNS1239134.
Acknowledgement
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 26
[1]G.Cowan,R.Melville,andY.Tsividis,“AVLSIanalogcomputer/mathco-processorforadigitalcomputer”,DigestIEEE2005ISSCC,pp.82-83.[2]B.SchellandY.Tsividis,“AclocklessADC/DSP/DACsystemwithactivity-dependentpowerdissipationandnoaliasing”,Digest2008IEEEISSCC,pp.550-551
[3]D.Kimetal.,“A1.85fW/bitultralowleakage10TSRAMwithspeedcompensationscheme”,Proc.IEEEISCAS,pp.69-72,May2011.[4]G.Klancar andI.Skrjanc,"Tracking-errormodel-basedpredictivecontrolformobilerobotsinrealtime,"RoboticsandAutonomousSystems,vol.55,no.6,pp.460-469, 2007.
[6]G.A.Korn,T.M.Korn,ElectronicAnalogandHybridComputers,McGrawHill,1964.[7]B.Gilbert,"Current-mode,voltage-mode,orfreemode?Afewsagesuggestions”,AnalogIntegratedCircuitsandSignalProcessing,vol.38,pp.83-101, February2004
References
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 27
Thankyou!
Questions?
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 28
ESSCIRC201541thEuropeanSolid-StateCircuitsConference
SessionB5L:Continuous-TimeHybridComputationwithProgrammableNonlinearities 29
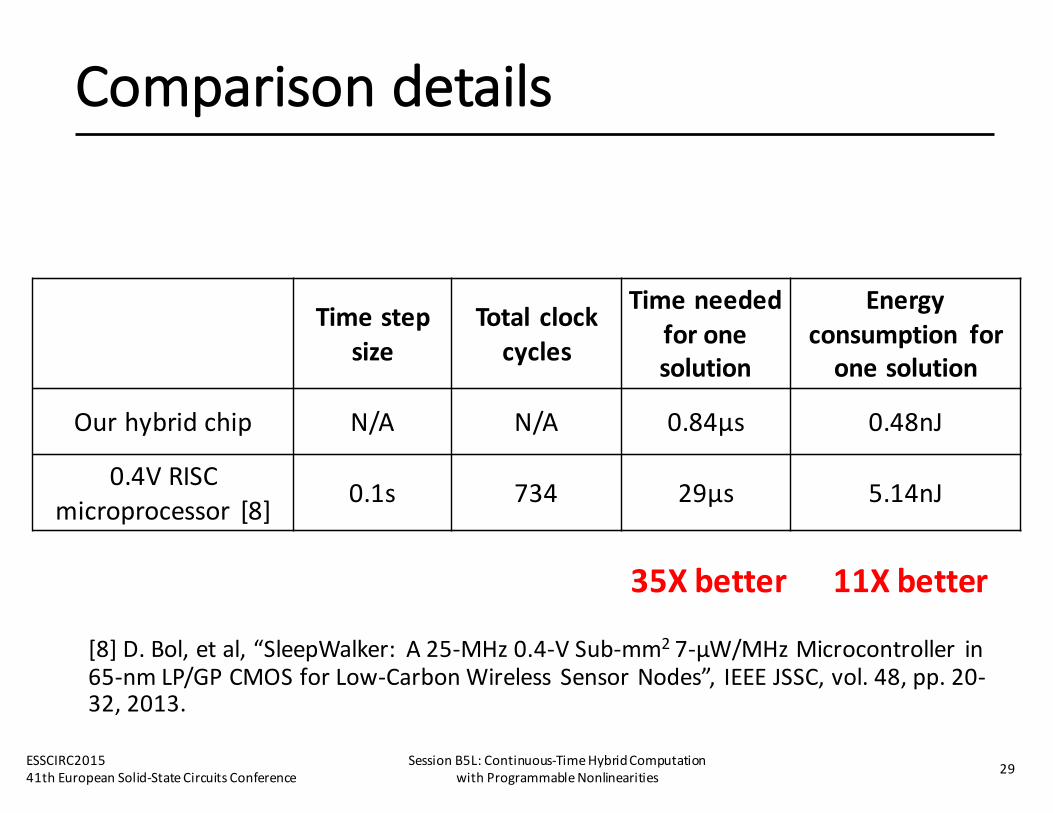
Comparisondetails
[8] D.Bol,etal,“SleepWalker: A25-MHz0.4-VSub-mm27-µW/MHzMicrocontroller in65-nmLP/GPCMOSforLow-CarbonWireless SensorNodes”, IEEEJSSC,vol.48,pp.20-32,2013.
Timestepsize
Total clockcycles
Timeneededforonesolution
Energyconsumption foronesolution
Our hybridchip N/A N/A 0.84μs 0.48nJ
0.4VRISCmicroprocessor [8] 0.1s 734 29μs 5.14nJ
35Xbetter 11Xbetter





























