Embed Size (px)
Citation preview

The 8th International Conference on Computer Science & Education (ICCSE 2013) April 26-28, 2013. Colombo, Sri Lanka SaB3.5
Context Aware Biomedical Robotic Platform For Elderly Health Care
Simi Surendran Amrita Center for Wireless Networks and Applications
Amrita Vishwa Vidyapeetham (AMRITA University)
Sreeram Rasamany Amrita Center for Wireless Networks and Applications
Amrita Vishwa Vidyapeetham (AMRITA University)
Rajesh Kannan Megalingam Department of Electronics and Communication Engineering Amrita school of Engineering Amrita Vishwa Vidyapeetham
Kerala, India [email protected]
Kerala, India p2wna l l01 [email protected]
(AMRITA University) Kerala, India
Abstract- Health professionals, nursing and care staff are in
short supply to cater to all the needs of the growing, global elderly
population. This paper presents the design and implementation of
a low cost and low power context aware robotic system to assist
the elderly due to a desire to develop accessible technology for all
countries and considering the poverty of many elderly. The system
is furnished with 4 wheels for indoor navigation. It is equipped
with 'environmental parameter monitoring' sensors and the
system can be controlled by the user through voice commands.
The system interprets the environmental contexts and makes
context aware decisions based on the sensed information. I On the
basis of the previous medical history from the database server and
the newly interpreted data, the decision making unit makes
efficient decisions and gives feedback to the device control unit.
The system improves the health of the elderly by regularly
monitoring the environmental conditions of people.
Index Terms- context aware robotics, elderly health care
INTRODUCTION
F or the past few decades, there is a steady increase in the population of elderly population(over 65 years).By 2050, the elderly population is due to increase Asia 31 4%[10]; Europe 70%[13]; and US 42% [1 1 ]. Elderly people are more likely to have health challenges, especially chronic disease. Figure 1 shows the analysis of the population getting diseased within the last decade. Due to social factors, increasing proportions of elderly people are living alone e.g.: l1 .3million (29.3%) elderly in US in 20 I 0 [12]. Health professionals and nursing and care staff are in short supply to cater to all the needs of the elderly. Furthennore home help staffs are expensive [14].
Robotics can play an important role in assisting the elderly to perfonn their daily activities This paper introduces a prototype of a robotic and wireless sensing device that can support a person with health challenges to be more independent and create an optimum environment for healing and mobility thus reducing the strain on the healthcare or family system to cater to the needs of elderly people. The technology has been designed with concentration on low cost and low power due to a desire to develop accessible technology for all countries and considering the poverty of many elderly.
978-1-4673-4463-0/13/$31.00 ©2013 IEEE 259
140
120 +---------------� .. ,«
C . 1' •••• «. -<2ye", �100 t------------...,...:=------...j \II
180 -- 2-4yem
t --.. - 5-15 years � 60 +-�������L-------� \II -···· 16-49yem "
�4°t-:������::��=;�==�::�1 50-64yem Q � 20 .J------��!!.,..J,,���=�-- .... " .. ·�5yem
c.. __ a. . -� -_c. --a. . -CIt -- - -- .. -- - ... - ...
2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 Year
F ig.l Percentage of diseased population
This area of research and its required technologies has not been completely resolved. More artificial intelligence technology needs to be optimized to deliver the medical guidance functions. To reduce the physical exertion of an individual with health challenges, it is essential that the system should be context aware. The major challenge in context awareness is to handle applications to examine the current environment and react to changes to the environment i.e.: location, crowd, climatic changes, time and changes in time according to these situations. Context data can include lighting, noise level, communication bandwidth etc.
A prototype of the system architecture has been developed with four wheels, a set of sensors and a voice control unit. The system continuously senses the variation in the environmental context. By acquiring the environmental contexts from the respective sensors and comparing this data with previous medical history, of the user, the decision making algorithm makes informed decisions. If there is a steady increase / decrease in the context data of temperature and humidity (acquired from sensors) the system will check the generated threshold value and handle suitable events with effective decisions. The robotic system is controlled by voice commands from the user. A voice control module converts voice

command inputs into text fonnat. The voice control output in text format is given as input to the micro controller unit for controlling the motors as binary ones and zeros in accordance to the given voice commands
The paper is outlined as follows: section II describes the related work. Section III and IV describes the system architecture and algorithms used to develop context aware platfonn. Section V describes the test results followed by the conclusion
RELATED WORKS
The following papers all describe context aware prototypes for health monitoring in elderly patients. Health care systems presented in [2] and [7] introduce a novel architecture with wearable sensor nodes. These systems [2] and [7] provide pervasive and secure access to wearable sensor systems and wireless sensor motes by adaptive encryption techniques/protocols. [2] found difficulties U from integration of context information sources for auto configuration i.e. adapt to the changes in context and mobility in the sensor nodes.
A new user interactive approach to intelligent wheelchairs has been explored [4] by Eric et al. The wheelchair actions are shared between the user and the wheelchair controller. [41's model is based on the intention estimation of the user and in the determination of the assistance for that intention. [4] states that, "The user intentions are represented as wheelchair behaviours like avoiding an obstacle, stopping safely in front of an object etc." [41's prototype learns from the examples in the training set and decides which specific input signals should be given by the user based on his/her intention. Collision avoidance was also considered in our system.[I] highlighted the importance of a fully adaptable system. [I] was able to achieve 71 % accuracy. However the threat was that the system may remind the user repeatedly to take the medication even after the user has done so. Therefore appropriate feedback must be held as a priority in the design of these systems.
Context aware middleware in [5] supports elderly people in perfonning their daily activities. [51's major benefit is to provide context awareness to various services running over several physical spaces. This prototype provides elderly people with the ability to interact with caretakers even though they may be located at different places. [5] runs its various applications through an Internet facility. Context aware middle ware in [8] also supports elderly people in performing their daily activities. We appreciated [81's attention to the case driven approach in their design. And we took this case driven approach into our design by retrieving the patient's previous use and medical requirements into the decision making process of our robotic system. In [8], a rule based learning approach had been taken into account after collecting the context data, this prompted us to also use rules in our decision making process.[9] which also introduced a rule based
260
SaB3.5
approach takes into account the representation of the concepts as knowledge known as ontology. It describes four types of ontologies based on patient domain, home domain, and alarm based and social contexts.
[3] improves the context awareness of a Wearable HealthMonitoring System (WHMS) using fuzzy logic. In our prototype we considered the value of ensuring adaptability for the individual user using learning methodologies as suggested by [3] when they were listing possible improvements for their system.
Most of these systems described have some limitations as these applications are using very rough user interfaces. In our system, the main research involves to design the robotic system to adapt automatically for indoor navigation in accordance with variations in the environmental contexts. The adaptation to the contexts is based on the decision making that provides necessary feedback to the control unit.
SYSTEM ARCHITECTURE
The architecture framework for the context adaptive robotic platform is shown in Figure 2. This design includes a four wheeled platform in which the user can navigate in indoor environments by using voice commands. Five voice commands are used to control this device.
Device
Device Management Context Management
Sensors � Co.'exl I.',rpre'er I
�� Eoyiroomeatal Season
Trmpf'rarurr Stn10r HllwidilY Senior I Decision Making I
I COllistoD Avoidance Sensors I I ,'oice Recopitioa :\Iodole I "
� System Response
I I )I &
Display FIB System
I I CODtroller
1;1 Fig.2 System Architecture
The architecture is split into four main units for clarity - the device & its device management unit, context management unit, system response & feedback unit, and data base server unit. The device includes the device management unit, interfaces for output such as LCD and the whole controlling unit. The device management unit includes data acquisition units such as sensors for navigation e.g.: collision sensors, and for environmental detection e.g.: temperature and humidity sensors. The sensors in the device management unit provide data in the form of a text format, analog and digital formats. The environmental parameter monitoring sensors sense the

current context of the environment. The collision avoidance sensors are used here for avoiding collisions with other objects. A voice recognition module is used to collect voice input and then converts the input into a text format which then controls the movement of the vehicle. The user will be provided with the visual display of the feedback. The voice recognition module used here is Easy vr module.
The context management unit involves data processing and decision making. The context interpreter collects the current environmental context inputs from the device management unit. Previous medical conditions of the patient are stored in the database that can be accessed from the server. The user id is sent to the server to retrieve the previous user details and to store the current environmental context data wirelessly. Based on the previous historical user data and current environmental context data, the system will make effective environmental controlling decisions appropriate to the user. The microcontroller ATMEGA328P performs this function of data processing.
ALGORITHM DESIGN
For the effective working of the system, two algorithms have been developed: a context aware decision making algorithm and a device control algorithm.
The context aware decision making algorithm is described as follows. For decision making the system will acquire the sensor data associated with the context. The medical history of the user is available in the database and the system can retrieve this data through a wireless link. Then acquired sensor readings and medical conditions of users are analyzed to compute the threshold values for each user. The comparison of the generated threshold value against the current sensor readings initiates different events as per the following table.
TABLE I. RULE MINING SET
Temperature Humidity Decisiou Less than Less than Switch ofT
user min threshold user min threshold Alc Greater than Greater than Switch on
user max threshold user max threshold Alc Between Between
Stay on user min thresholsd and user min thresholsd and
user max threshold user max threshold Room
Less than Between
Decrease user min threshold
user min thresholsd and Alc
user max threshold
The most suitable event for a particular user is selected based on the previous <environmental conditions, output event> pairs, generated threshold values and users profile.
If the current context values greater than or equal to the generated threshold values, the system will conclude an action using a predefined rule set for each person. The decision to be made is acquired from a predefined rule set. The rule set contains the actions to be performed by the device so that the
261
SaB3.5
vanatlOns in context data can be responded to appropriately. The actions correspond to the feedback given to the device to compensate for the variations in the system response. The actions performed by the system resulting from the decision making are displayed in the user interface. This procedure enhances the system to reduce the ambiguity for taking efficient decisions.
The device control algorithm gets the details of action to be performed from the context management unit. Depends on the action specification, it will drive the motors while avoiding obstacles and give visual feedback to the user. The device control is done through the voice commands given by the user. These commands should be converted in to corresponding text format by the processor.
Algorithm 1 Decision making algorithm
Input : Temperature: Temp_T hd := {tmp_law, tmpJ>igh}; Humidity: Hum_Thd := {hum_law, humJ>igh}; Decision: Dec := Null;
Result:Feed�ack
begin
end
Temp_Context:= SenseJ;mp_dataO ; Hum_Context:= SenseJ>um-<iataO;
while (ctr)do L Store�ata:= {Temp_Context,HuIILContext,Userjd};
Action:= Cmp�ata(TempYhd, HumYhd, Store..Data); Dec:= Ruk.set(dL to <1,.); where: d; = {a I aEAction} 'I i E(l to n);
Feed�ack := Dec.ctr; return Feed�ack;
ANALYSIS AND EXPERIMENTAL RESULTS
A prototype of the system architecture is developed with four wheels, set of sensors and a voice control unit. The system continuously sensing the variation in the environmental context. If there is a steady increase / decrease in the context data, the system will check the generated threshold value and handles suitable events.
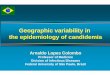
The computation of comfort level user threshold values with varying temperature and humidity within indoor environments is analyzed. The following Figure 3 shows the variation of environmental context with respect to time.

40 r---------------------------�
15 �----�--------------------�
.5 20�--------------------------� <> � ; 15�------------------------� 6 : 10�--------------------------�
1 2 3 4 5 6 7 8 9 101112 131415161718192021 22 2324
Tim n
Fig.3 Context Data Variations
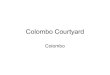
The following Figure 4 shows the threshold value computation of different users with varying medical history in the same environmental context. As the system is selecting thresholds based on the user profile, the user convenience is improved significantly compared to the selection of a flat threshold.
40
35
30 i.o � 2 5 " � � 20 � 0 5 15
VJ 10
1 2 3 4 5 6 7 8 9 1011121314151617181920 2122 2324 Time(hn)
Fig.4 Threshold values computation
- TemperatuIe - Humidity - - -User I)hd _ .. -User2)hd _ .. -Usern)hd
The hardware implementation includes a robotic platform, easy VR voice recognition module and micro controller ATMEGA328. The easy vr convert the voice data to text format and it is given to the microcontroller. After wards micro controller send the corresponding commands to the receiver through wireless data modem. The robotic platform is equipped with the temperature and humidity sensors, collision avoidance sensors, motor drivers and motors, wireless RF modem.
The Figure 5 indicates the robot hardware unit model. The system takes voice commands that are transmitted wirelessly and convert in to binary control signals for the motor controller
262
SaB3.5
to drive the motors. The system is powered using Lead acid batteries [t provides power of around l.2Ah.
Fig.S Robot Hardware Unit
The environmental contexts are displayed in user interface. These environmental contexts are measured by the temperature and humidity sensors in the robot hardware. These values are compared with the computed threshold value of the user and perform decision making. t The decision making is done from predefmed rule set. The Figure 6 shows the decision made by the system in accordance with the context data provided by the sensors. These decisions are given to the feedback unit for the whole system to control. The feedback unit calculates the required parametrs for motor movement and This given to the controller to take necessary actions.
Fig.7 Decision making
CONCLUSION AND FUTURE WORK
A context aware robotic platform that helps elderly people in has been designed and tested. The voice recognition is used to control the device for navigation in indoor environments.

The device takes effective decisions by utilizing the medical history of the patient. The test results show that the system is able to make context aware decisions dependent on a change in environment. Here we have implemented a prototype and are now working on real implementation. The future scope is to incorporate autonomous navigation with human machine intelligence. In future we hope to test user satisfaction with the generated events. We will aim to improve the effectiveness of event handling in terms of rules. We also hope to improve the precision rate of the decision making algorithm.
ACKNOWLEDGMENT
We would like to express our immense gratitude to our beloved Chancellor Shri.Mata Amritanandamayi Devi for providing motivation and inspiration for doing this research work.
REFERENCES
[1] Feng Zhou, Jianxin (Roger) Jiao, Songlin Chen, Daqing Zhang: "A Case Driven Ambient Intelligence System for Elderly inHome Assistance Applications", IEEE Transactions On Systems, Man, And Cybernetics-Part C:Applications And Reviews, Vol. 41, No. 2, March 2011.T. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford: Clarendon, 1892, pp.68-73.
[2] Y. M. Huang, M. Y. Hsieh, H. C. Chao, S. H. Hung, J. H. Park: "Pervasive, Secure Access to a Hierarchical Sensor-Based Healthcare Monitoring Architecture in Wireless Heterogeneous Networks", IEEE Journal On Selected Areas In
Communications, Vol. 27, No.4, May 2009.
[3] Alexandros Pantelopoulos, Nikolaos G. Bourbakis: "PrognosisA Wearable Health-Monitoring System for People at Risk: Methodology and Modeling",TEEE Transactions On Information Technology In Biomedicine, Vol. 14,No. 3, May 2010.
[4] Dirk Vanhooydonck, Eric Demeester, Alexander Hntemann, Johan Philips, Gerolf Vanacker, Hendrik Van Brussel, Marnix Nuttin:, Katholieke Universiteit Leuven "Adaptable navigational assistance for intelligent wheelchairs by means of an implicit personalized user model", Elsevier , Robotics and Autonomous Systems 58 (2010).
[5] Hung Keng Pung, Tao Gu, Wenwei Xue, Paulito P. Palmes, .Tian Zhu,Wen Long Ng, Chee Weng Tang,Nguyen Hoang Chung: "Context-Aware Middleware for Pervasive Elderly Homecare", IEEE Journal On Selected Areas In Communications, Vol. 27, No. 4, May 2009.
[6] Federica Paganelli, Member, IEEE, and Dino Giuli, Senior Member, IEEE: "An Ontology-Based System for ContextAware and Configurable Services to Support Home-Based Continuous Care", IEEE Transactions On Information Technology In Biomedicine, Vol. 15, No. 2, March 2011.
[7] Francesco Chiti, Member, IEEE, Romano Fantacci, Fellow, IEEE, Francesco Archetti,Enza Messina, and Daniele Toscani: "An Integrated Communications Framework for Context Aware Continuous Monitoring with Body Sensor Networks",IEEE Journal On Selected Areas In Communications, Vol.27, NO. 4, MAY 2009.
263
SaB3.5
[8] Nirmalya Roy, Gautham Pallapa and Sajal K. Das, Center for Research in Wireless Mobility and Networking (CReWMaN), The University of Texas at Arlington, "A Middleware Framework for Ambiguous Contex Mediation in Smart Healthcare Application",Third IEEE International Conference on Wireless and Mobile Computing, Networking and Communications 2007.
[9] Ziyu Lv, Feng Xia, Guowei Wu, Lin Yao, Zhikui Chen, School of Software, Dalian University of Technology:"iCare: A Mobile Health Monitoring System for the Elderly", IEEE/ ACM International Conference on Green Computing and Communications & IEEE/ACM International Conference on Cyber, Physical and Social Computing,20 10.
[10] "Asia's Aging Population". http://sites.asiasociety.org/ asia2l summit/wpcontent/uploads/20 1 0/111 Asias-Aging-PopulationEast-West-Centerl.pdf, 2008 [Jan. 2013].
[II] Grayson K. Vincent and Victoria A. Velkoff. "THE NEXT FOUR DECADES The Older Population In The United States".
http://www.census.gov/prod/201 Opubs/p25-1138.pdf,May.20 I 0 [Dec.2012].
[12] U.S. Department of Health and Human Services. "A Profile of Older Americans:20 I I" http://www.aoa.gov/
aoaroot/aging_ statisticslProfile/20111docs/2011 profile.pdf:Nov.
201 1 [Jan.201 3].
[13] http://ec.europa.eu/health-eu/my _health/elderly/index _ en.htm
[Jan.20 1 3].
[14] http://www.seniorhomes.com/p/elderly-assisted-living/
[Jan.20 1 3].