Embed Size (px)
Citation preview
Constant Density Spanners for Wireless Ad hoc Networks
Kishore Kothapalli (JHU)Melih Onus (ASU)Christian Scheideler (JHU)Andrea Richa (ASU)
1

Ad hoc Networks
● Network created by wireless stations communicating over a wireless medium
● Two challenges– Lack of centralized infrastructure– Mobility
2
Ad hoc Networks
● Network created by wireless stations communicating over a wireless medium
● Two challenges– Lack of centralized infrastructure
– Mobility
● Need topology control in ad hoc networks– Local control strategies are needed
– Support time and energy efficient routing
● How to model ad hoc networks?– Need models that are close to reality
– But can still design algorithms using the model2

Modeling Wireless Networks
● Wireless communication very difficult to model accurately– Shape of transmission range
– Interference
– Mobility
– Physical Carrier Sensing
3

Outline Introduction
→Models of Wireless networks
● Our model
● Our results
● Problem description
– Running Example
● Conclusions
4
Models of Wireless Networks
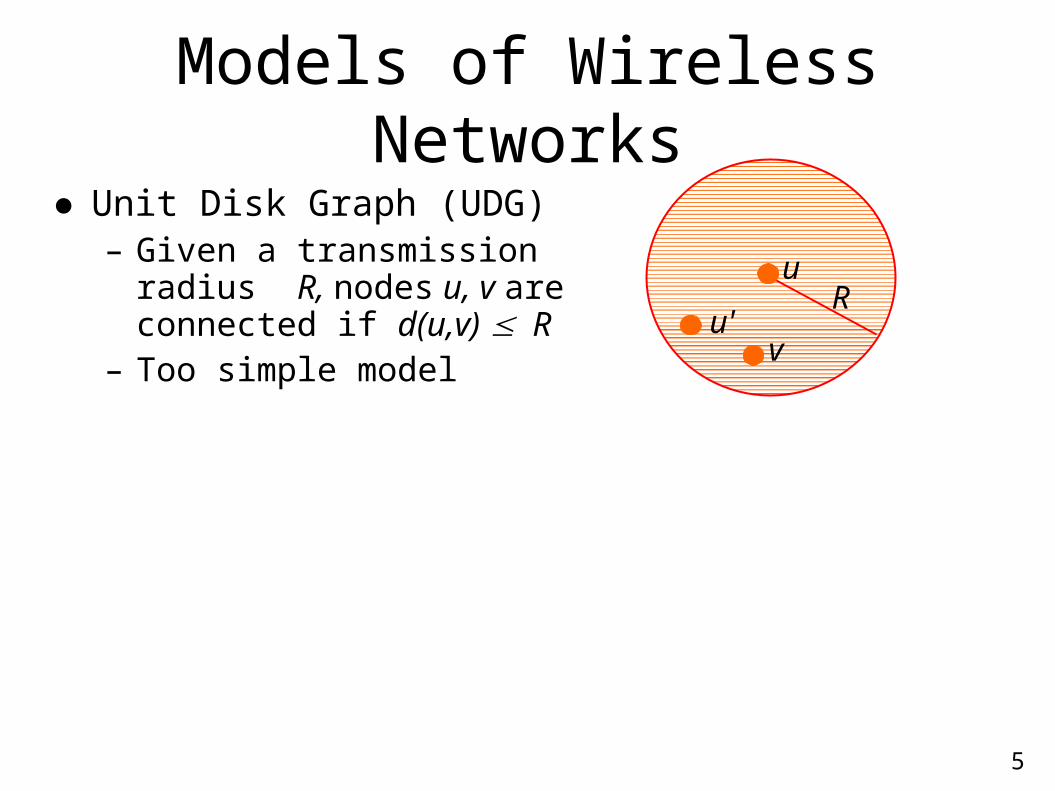
● Unit Disk Graph (UDG)– Given a transmission radius
R, nodes u, v are connected if d(u,v) ≤ R
– Too simple model
5
uR
vu'
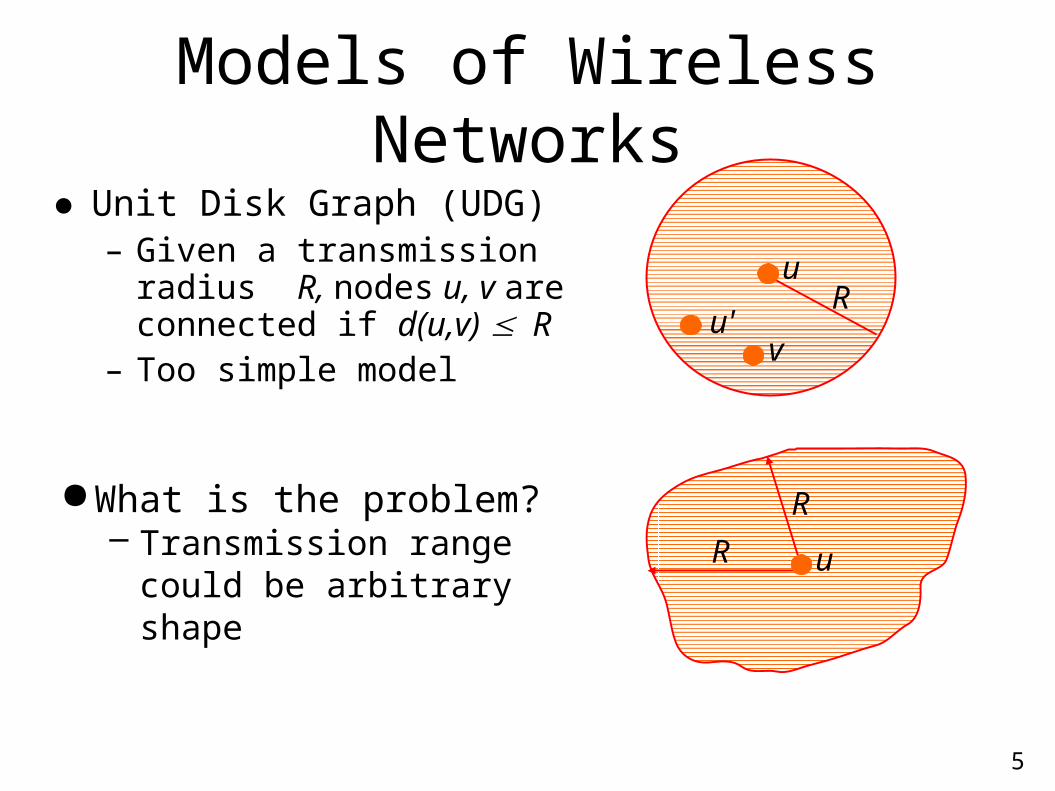
●What is the problem?– Transmission range could be
arbitrary shape
5
R
R
uR
vu'
u
Models of Wireless Networks
● Unit Disk Graph (UDG)– Given a transmission radius
R, nodes u, v are connected if d(u,v) ≤ R
– Too simple model
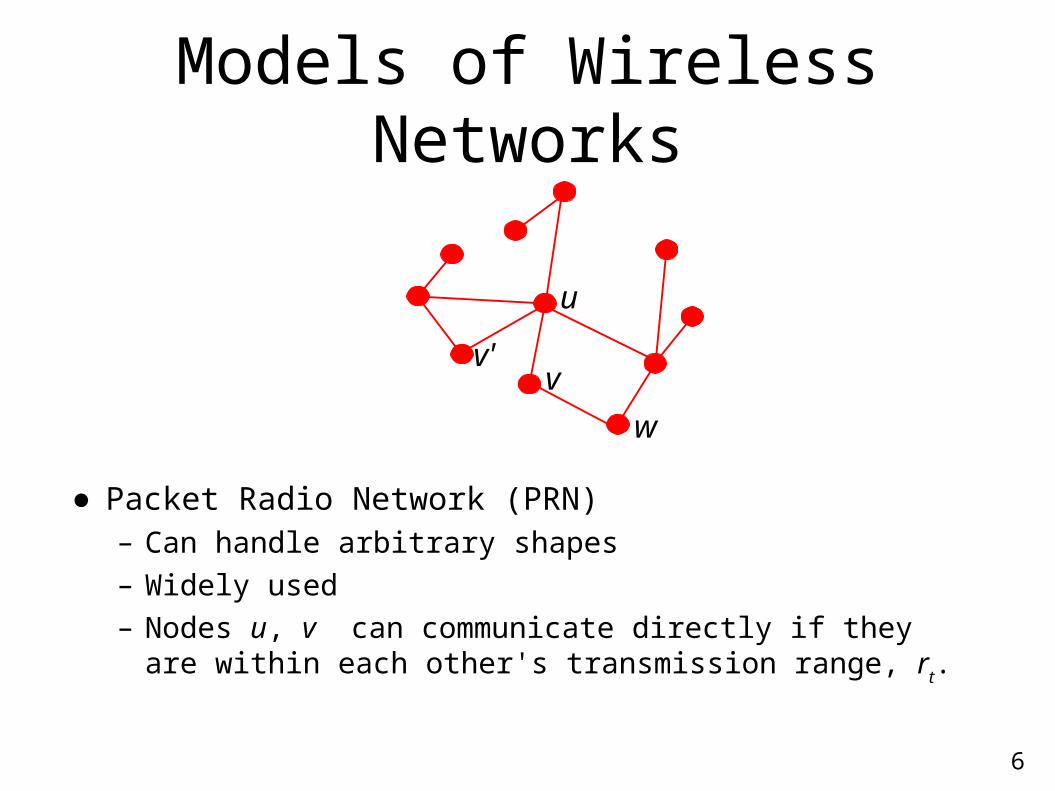
● Packet Radio Network (PRN)– Can handle arbitrary shapes
– Widely used
– Nodes u, v can communicate directly if they are within each other's transmission range, rt.
6
u
v
w
v'
Models of Wireless Networks
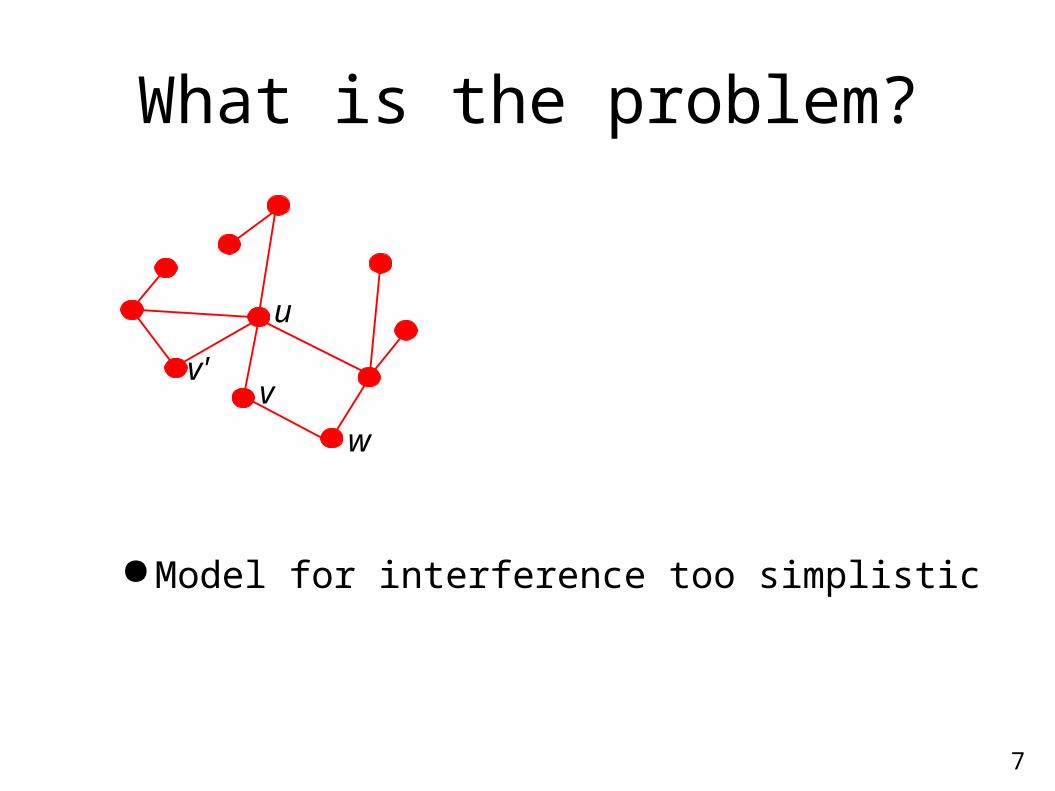
What is the problem?
●Model for interference too simplistic
7
u
v
w
v'
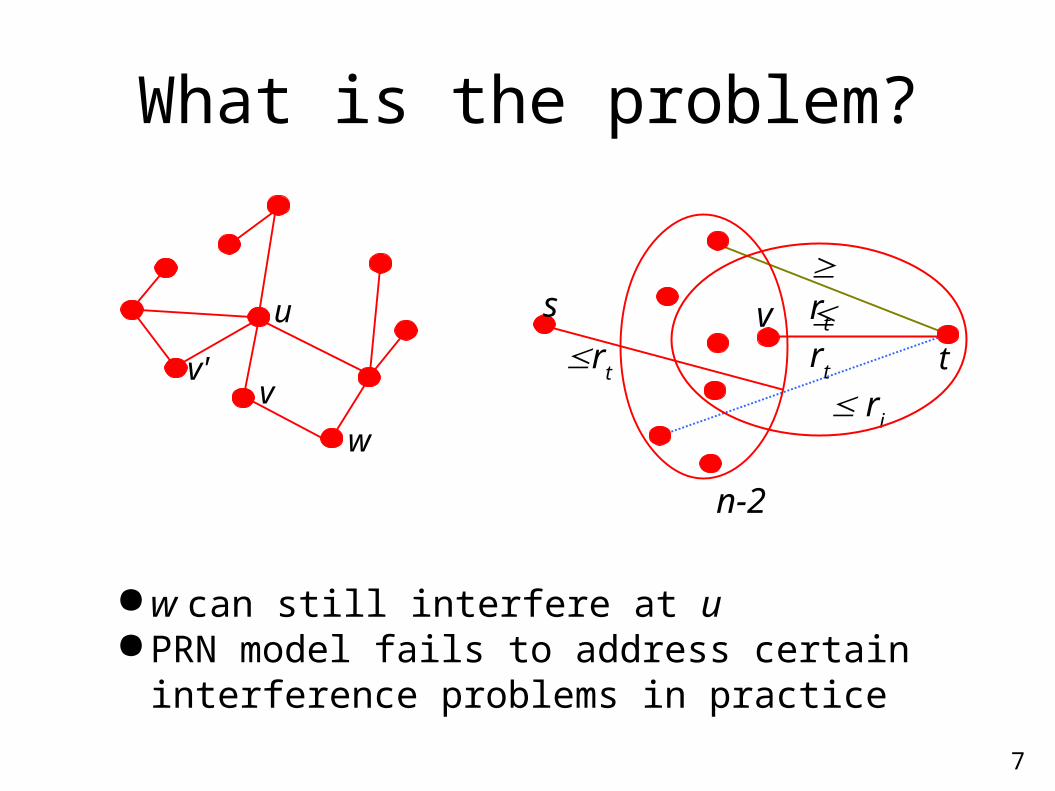
●w can still interfere at u●PRN model fails to address certain interference
problems in practice
v
n-2
s
t ≤rt
≤ rt
≤ ri
≥ rt
7
What is the problem?
u
v
w
v'
8
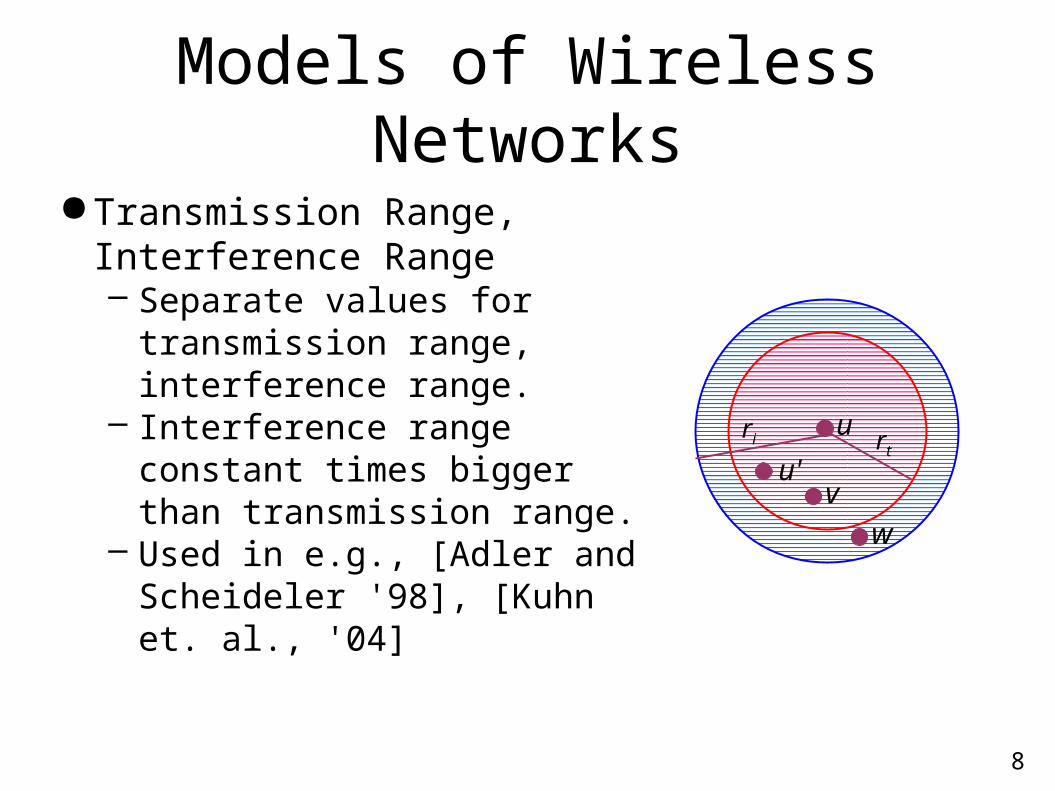
●Transmission Range, Interference Range– Separate values for transmission
range, interference range.– Interference range constant times
bigger than transmission range.– Used in e.g., [Adler and
Scheideler '98], [Kuhn et. al., '04]
Models of Wireless Networks
urt
vw
u'
ri

8
●Transmission Range, Interference Range– Separate values for transmission
range, interference range.– Interference range constant times
bigger than transmission range.– Used in e.g., [Adler and
Scheideler '98], [Kuhn et. al., '04]
●What is the problem?– Extension of unit disk model to
handle interference
Models of Wireless Networks
urt
vw
u'
ri
9
Outline
Introduction
Models of Wireless Networks
→Our Model
● Our results
● Problem description
– Running Example
● Conclusions
Our Model
● Transmission range, interference range via cost function
● Carrier sensing– Two types
1)Physical carrier sensing
2)Virtual carrier sensing
10

Cost Function
● Gr = (V, Er), set of nodes V, Euclidean distance d(•,•)● c is a cost function on nodes
– symmetric: c(u,v) = c(v,u)
− [0,1), depends on the environment
– c(u,v) [(1-)•d(u,v), (1+)•d(u,v)]
● Edge (u,v) Er if and only if c(u,v) ≤ r
w
u
va
b
11
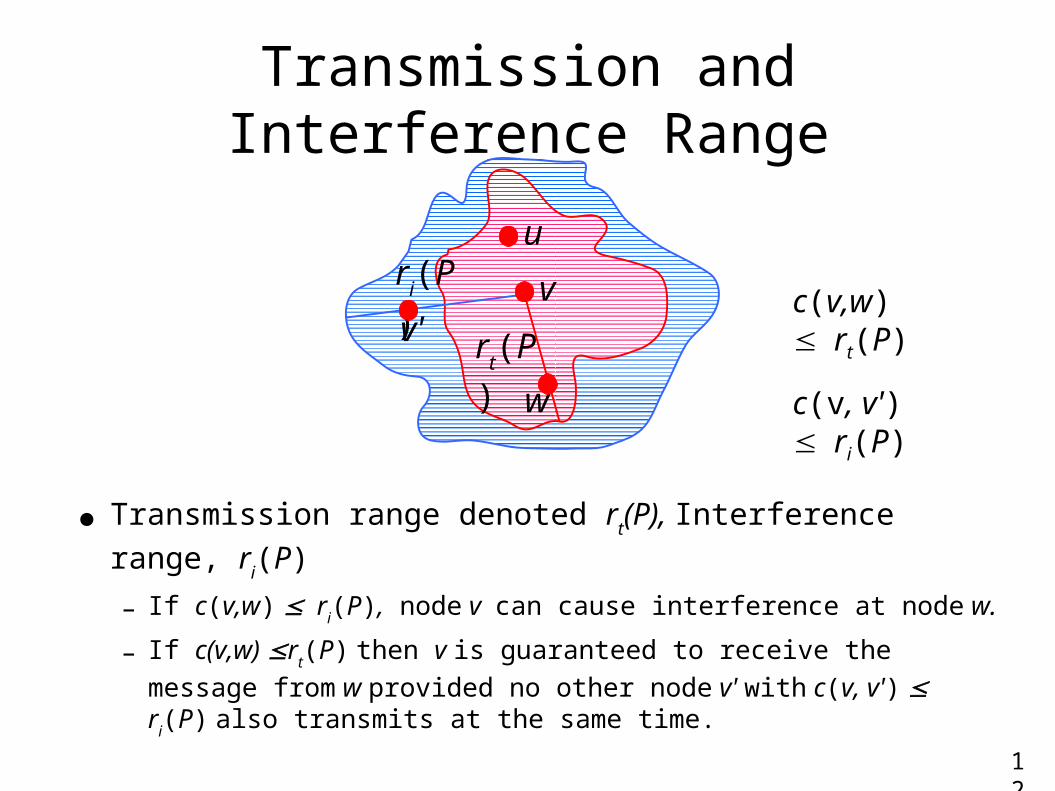
Transmission and Interference Range
● Transmission range denoted rt(P), Interference range, r
i(P)
– If c(v,w) ≤ ri(P), node v can cause interference at node w.
– If c(v,w) ≤rt(P) then v is guaranteed to receive the message from
w provided no other node v' with c(v, v') ≤ ri(P) also transmits at
the same time.
12
w
rt(P)v'
ri(P)
u
v c(v,w) rt(P)
c(v, v') ri(P)

Physical Carrier Sensing
● Provided by Clear Channel Assessment (CCA) circuit:– Monitor the medium as a function of Received Signal
Strength Indicator (RSSI)
– Energy Detection (ED) bit set to 1 if RSSI exceeds a certain threshold
– Has a register to set the threshold in dB
13

Physical Carrier Sensing
● Carrier sense transmission (CST) range, denoted rst(T, P)
● Carrier sense interference (CSI) range, denoted rsi(T, P)
● Both the ranges grow monotonically in both T and P.
w
vr
st(T,P)v'
v''
14
rsi(T,P) c(w,v) rst(T, P)
c(w, v') rsi(T, P)
c(w, v'') rsi(T, P)
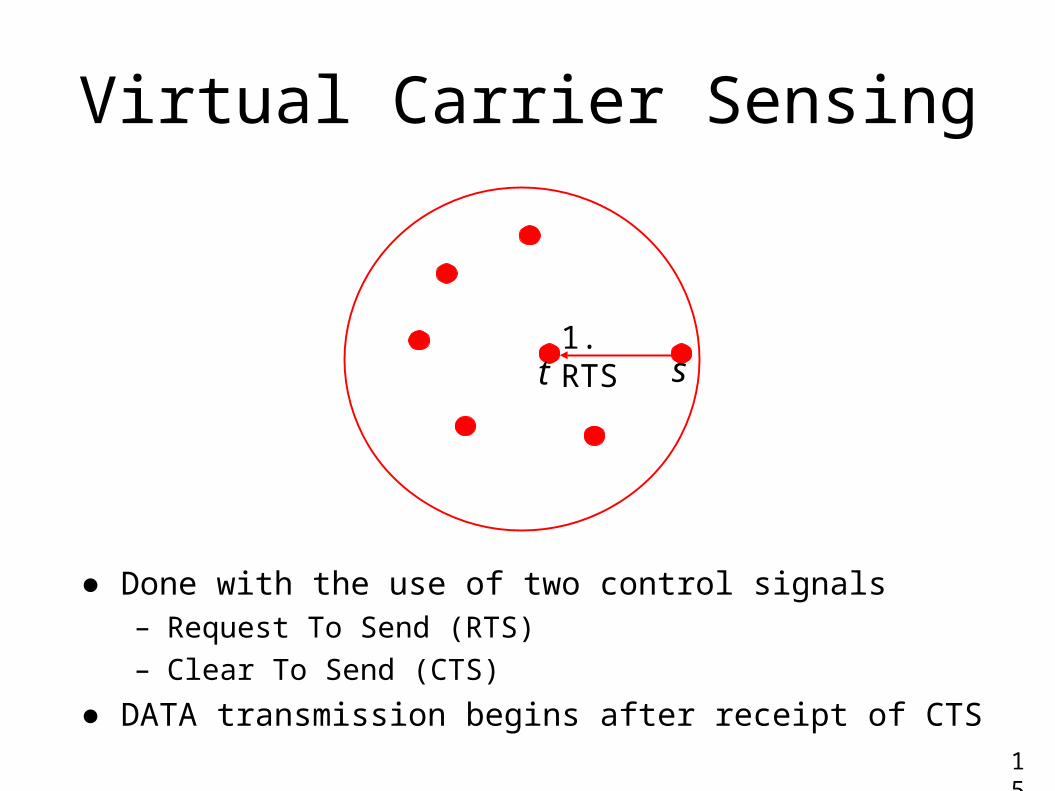
Virtual Carrier Sensing
1. RTSst
15
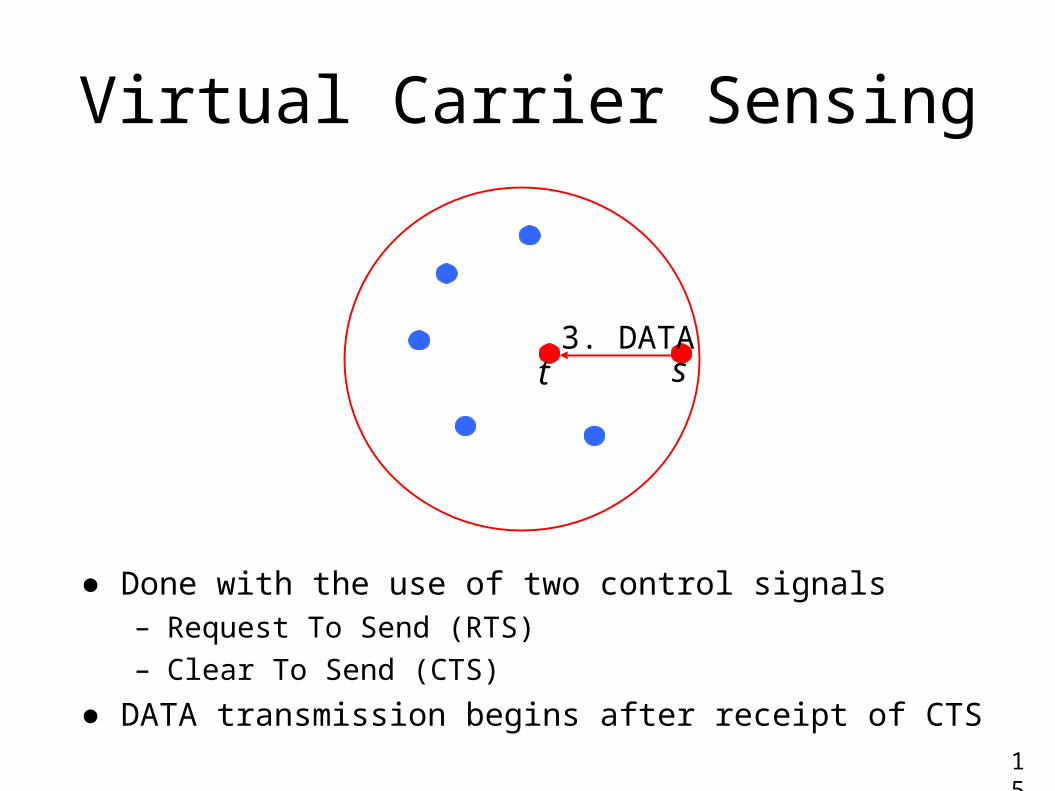
● Done with the use of two control signals – Request To Send (RTS)
– Clear To Send (CTS)
● DATA transmission begins after receipt of CTS
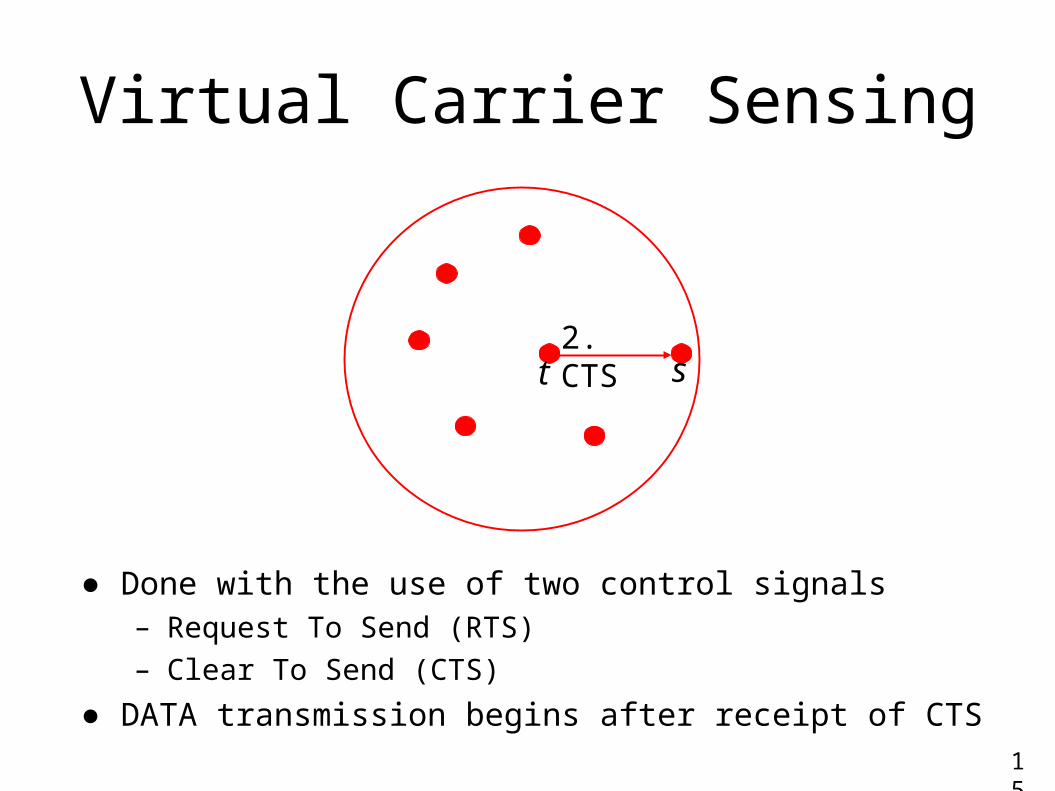
Virtual Carrier Sensing
● Done with the use of two control signals – Request To Send (RTS)
– Clear To Send (CTS)
● DATA transmission begins after receipt of CTS15
2. CTSst
Virtual Carrier Sensing
15
3. DATAst
● Done with the use of two control signals – Request To Send (RTS)
– Clear To Send (CTS)
● DATA transmission begins after receipt of CTS
16
Outline
Introduction
Models of Wireless Networks
Our Model
→Our Results
● Problem description
– Running Example
● Conclusions
Our Results
● More general model for ad hoc wireless networks● Constant density topological spanner for the original
network– Local-control– Self-stabilizing [Dijkstra '74]– No knowledge of size or topology of network, including
estimate of size– Nodes do not need globally distinct labels– Constant storage and constant size messages
17
18
Outline
Introduction
Models of Wireless Networks
Our Model
Our Results
→Problem Description
– Running Example
● Conclusions

Topological Spanners
● Definition: Given a graph G = (V,E), find a sub-graph H = (V, E') such that d
H(u,v) ≤ t•dG(u,v)
– H is also called a t-spanner.
● Previous Work– [Alzoubi et. al., '03] 5-spanner
– [Dubhashi et. al., '03] log n – spanner
19
Our Approach
20
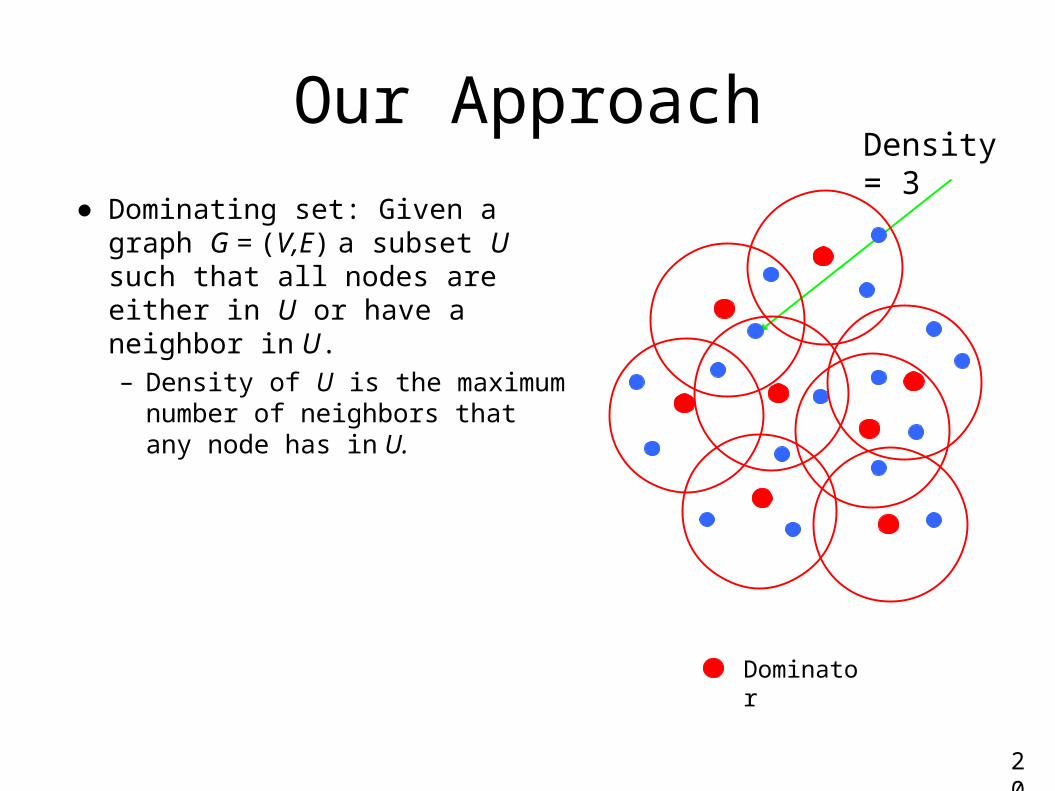
● Dominating set: Given a graph G = (V,E) a subset U such that all nodes are either in U or have a neighbor in U.– Density of U is the maximum
number of neighbors that any node has in U.
Dominator
Density = 3

● Seek a connected dominating set of constant density.
20
Our Approach
● Dominating set: Given a graph G = (V,E) a subset U such that all nodes are either in U or have a neighbor in U.– Density of U is the maximum
number of neighbors that any node has in U.
Dominator
Density = 3

Our Approach
● Each round has time slots reserved for each phase of the protocol
21
Time
One round
Phase I Phase II Phase III Phase I Phase II Phase III
● Three phase protocol1. Phase I: Dominating set2. Phase II: Distributed Coloring3. Phase III: Gateway Discovery
22
Outline
Introduction
Models of Wireless Networks
Our Model
Our Results
Problem Description
→Running Example
● Conclusions
Phase I: Constant Density Dominating Set
● Observation: In Gr = (V, Er) any Maximal Independent Set (MIS) is also a dominating set of constant density
● Maximal Independent Set– well studied starting from [Luby '85], [Dubhashi et.
al., '03], [Kuhn et. al., '04], [Gandhi and Parthasarathy '04]
● Our solution– Uncertainties in our model make it harder– Without knowing size of network, have to use
physical carrier sensing– Randomized protocol that runs in O(log4 n) w.h.p.
23
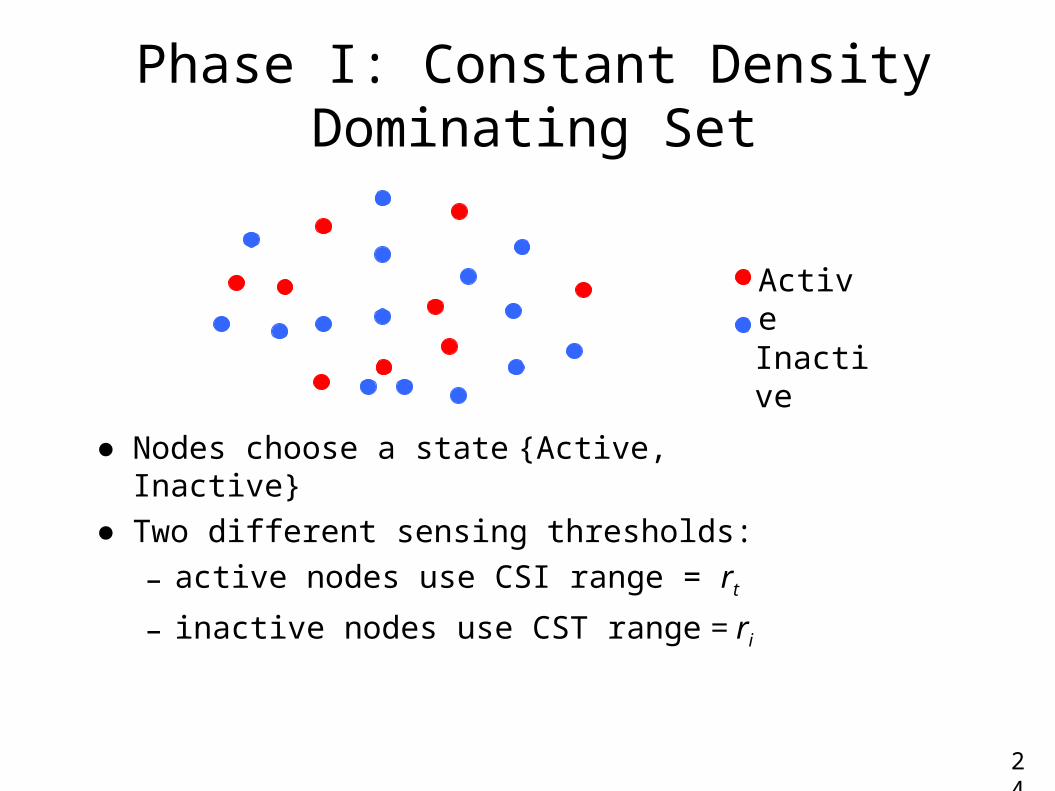
● Nodes choose a state {Active, Inactive}
● Two different sensing thresholds:
– active nodes use CSI range = rt
– inactive nodes use CST range = ri
24
InactiveActive
Phase I: Constant Density Dominating Set

● If an active node sends a LEADER signal, the nodes that receive/sense the leader signal stay inactive
Changed from Active Inactive
●Nodes choose a state {Active, Inactive}● Two different sensing thresholds:
– active nodes use CSI range = rt
– inactive nodes use CST range = ri
24
Inactive
Active and sent LEADER
Phase I: Constant Density Dominating Set

Phase I: Constant Density Dominating Set
DominatorsInactive nodes
● Nodes choose a state {Active, Inactive}● Two different sensing thresholds:
– active nodes use CSI range = rt
– inactive nodes use CST range = ri
● If an active node sends a LEADER signal, the nodes that receive/sense the leader signal stay inactive
● If no active node available, inactive nodes become active again
24
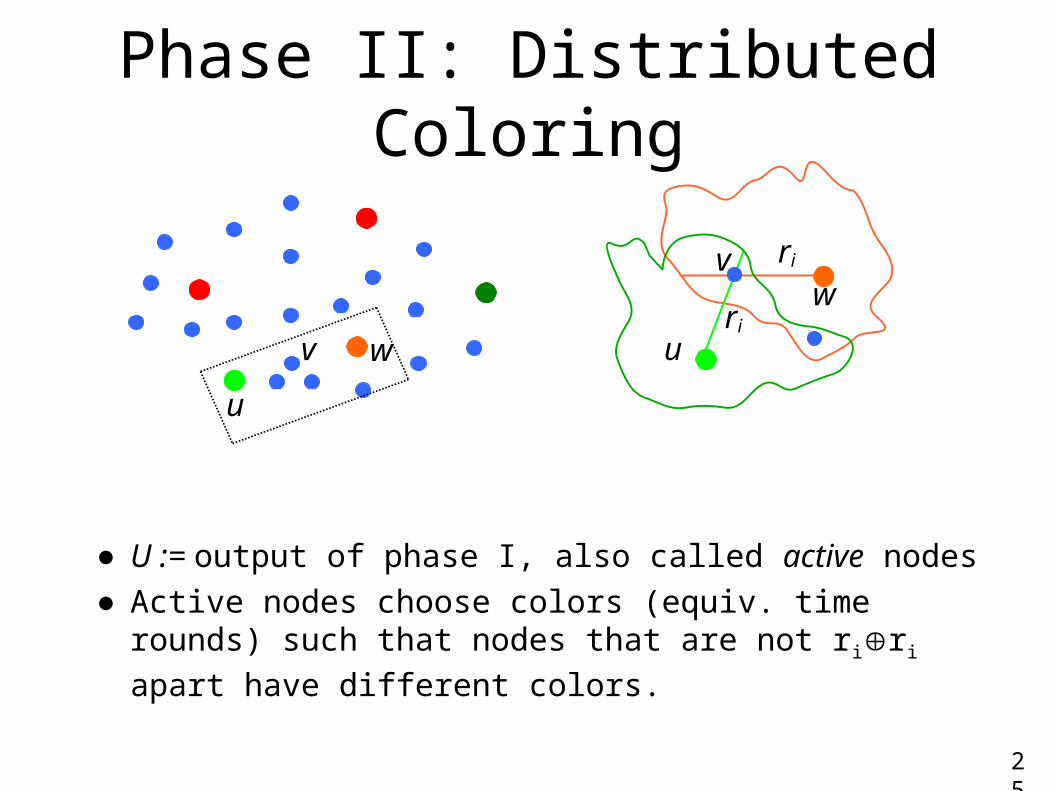
Phase II: Distributed Coloring
● U := output of phase I, also called active nodes● Active nodes choose colors (equiv. time rounds)
such that nodes that are not riri apart have
different colors.25
ri
ri
u
vw
u
v w
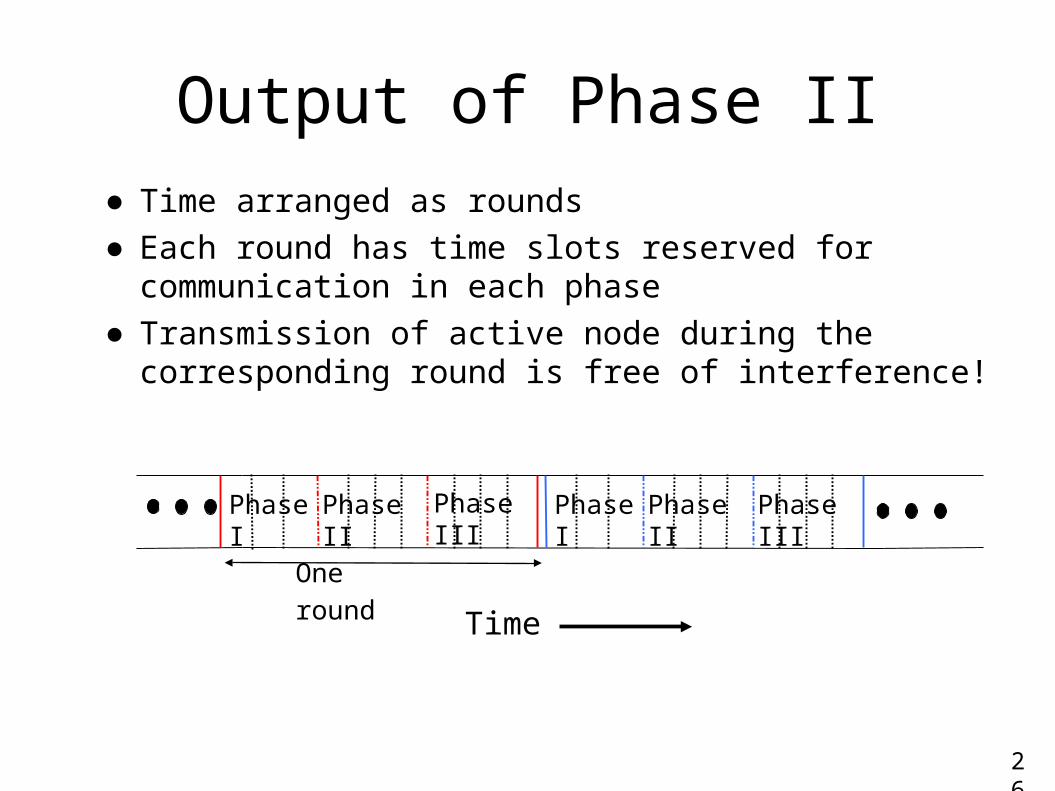
Output of Phase II
● Time arranged as rounds● Each round has time slots reserved for
communication in each phase● Transmission of active node during the
corresponding round is free of interference!
26
One round
Phase I Phase II Phase III Phase I Phase II Phase III
Time

Phase III: Gateway Discovery● Dominating set U may not be a connected
dominating set– Extend U by gateway nodes.
● Observation: Each node in U needs O(1) gateways.● Uses coloring achieved in Phase II to minimize
interference problems● Approach similar to that used in [Wang and Li, '03]
27
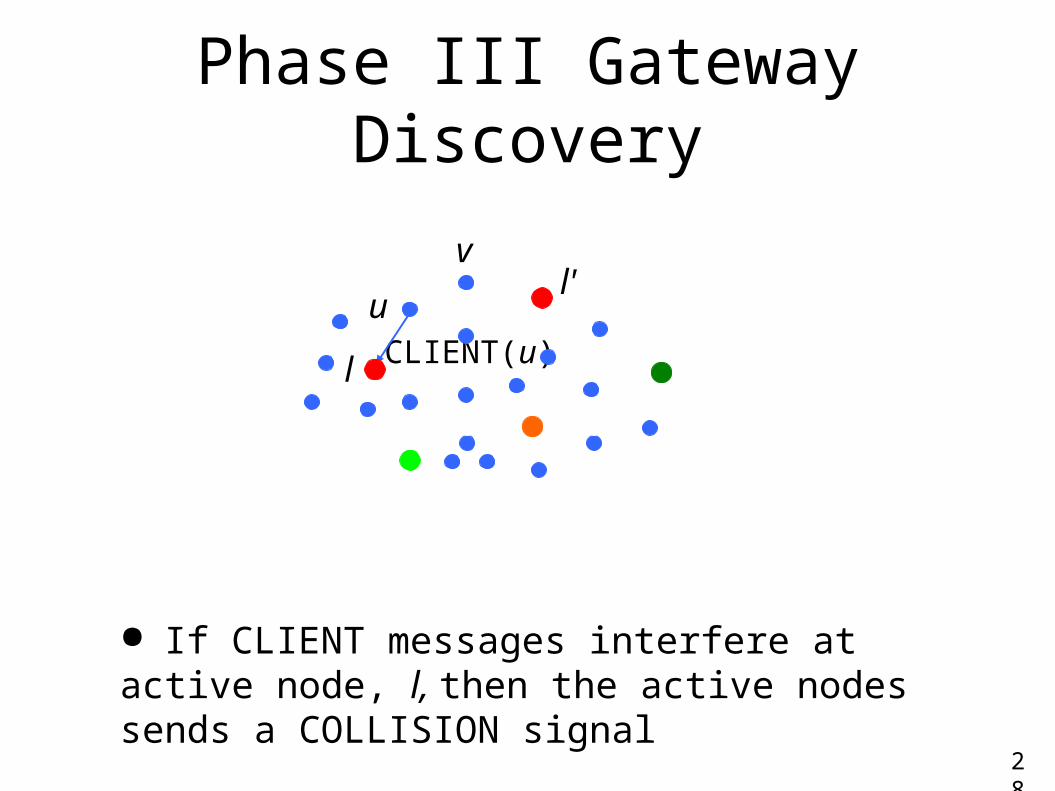
Phase III Gateway Discovery
u
l
l'
CLIENT(u)
v
● If CLIENT messages interfere at active node, l, then the active nodes sends a COLLISION signal
28

Phase III Gateway Discovery
ACK
● Eventually only one inactive node sends a CLIENT message to an active node
28
u
l
l'v
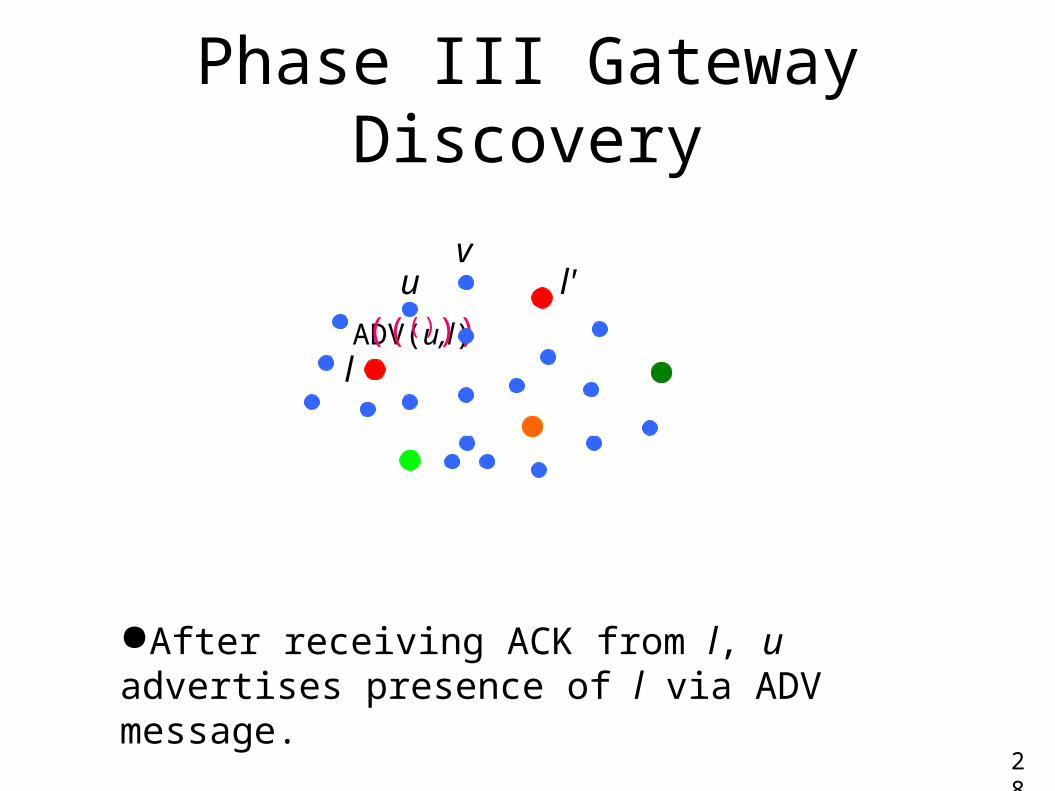
Phase III Gateway Discovery
28
●After receiving ACK from l, u advertises presence of l via ADV message.
ADV(u,l)((( )))
u
l
l'v
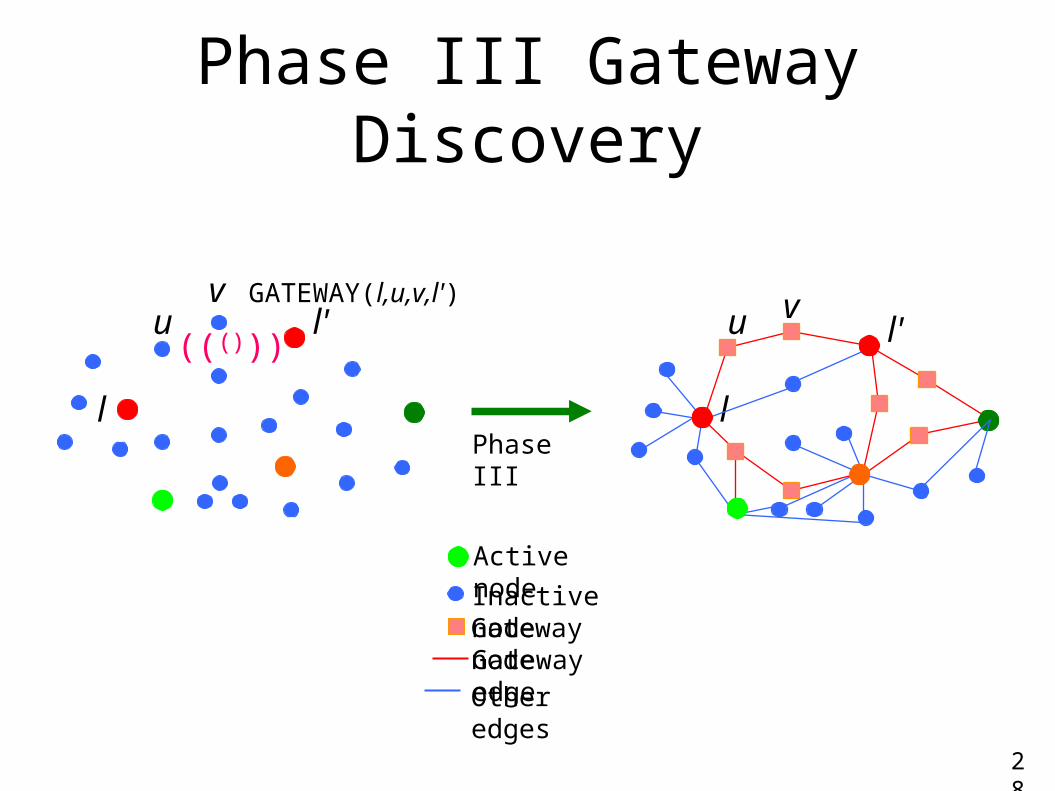
Phase III Gateway Discovery
Phase III
28
GATEWAY(l,u,v,l')
((( )))u
l
l'v
u
l
l'v
Active node
Inactive nodeGateway nodeGateway edgeOther edges

3-Spanner
● Our construction achieves a 3-spanner of constant density for the original network.
●Total runtime = O(log4 n + (D log D) log n) whp.– D is the density of the original network
29
u
l
l'v
st
Active node
Inactive nodeGateway nodeGateway edgeOther edges
30
Outline
Introduction
Models of Wireless Networks
Our Model
Our Results
Problem Description
Running Example
→Conclusions

Conclusions and Future Work
● More realistic model for wireless networks● Still possible to design efficient algorithms
– Constant density 3-spanner
– Algorithms are simple and use constant sized messages, constant storage at nodes
● Further applications– Higher communication primitives e.g., broadcasting,
gathering
– Handling mobility
31








![THE MGC Simon Driver (RSAA) David Lemon, Jochen Liske (St Andrews) Nicholas Cross (JHU) [Rogier Windhorst, Steve Odewahn, Seth Cohen (ASU)]](https://img.pdfslide.us/doc/110x75/56649ee75503460f94bf7720/the-mgc-simon-driver-rsaa-david-lemon-jochen-liske-st-andrews-nicholas.jpg)