Embed Size (px)
Citation preview
Concepts for Programming a Rigid Body Physics Engine
Part 1Presented by Scott Hawkins
Game Physics Engine
Developmentby Ian Millington
source:
Topics
• Mathematical Data Types
• Rigid Body Data
• Algorithm for Updating the Physics– Finding the timestep– Applying forces and torques– Integration– Collision Detection– Collision Resolution
Mathematical Data Types
• real– time, t
• Vector– position, p
• Quaternion– orientation, θ
• 3x3 Matrix– inertial tensor, I
• 4x4 Matrix
Quaternions
• q represented using four reals, w, x, y, z:• q = w + xi + yj + zk
• relationship between i, j, and k:• ij = -ji = k
• jk = -kj = i
• ki = -ik = j
• ii = jj = kk = ijk = -1
Quaternion Operations
• q1 + q2 = (w1 + w2) + (x1 + x2)i +(y1 + y2)j + (z1 + z2)k
• q1 * q2 = w1w2 - x1x2 - y1y2 - z1z2 +(w1x2 + x1w2 + y1z2 - z1y2)i +(w1y2 - x1z2 + y1w2 + z1x2)j +(w1z2 + x1y2 - y1x2 + z1w2)k
Rigid Body Data
• mass, m (real)• inertia tensor, I (3x3 Matrix)• position, p (Vector)• velocity, p’ (Vector)• acceleration, p” (Vector)• orientation, θ (Quaternion)• angular velocity, θ’ (Vector)• angular acceleration, θ” (Vector)
Rigid Body Data
• force accumulator, f (Vector)
• torque accumulator, τ (Vector)
• inverse mass, m-1 (real)
• inverse inertia tensor, I-1 (3x3 Matrix)• I-1 in world coordinates (3x3 Matrix)
• transform matrix (4x4 Matrix)
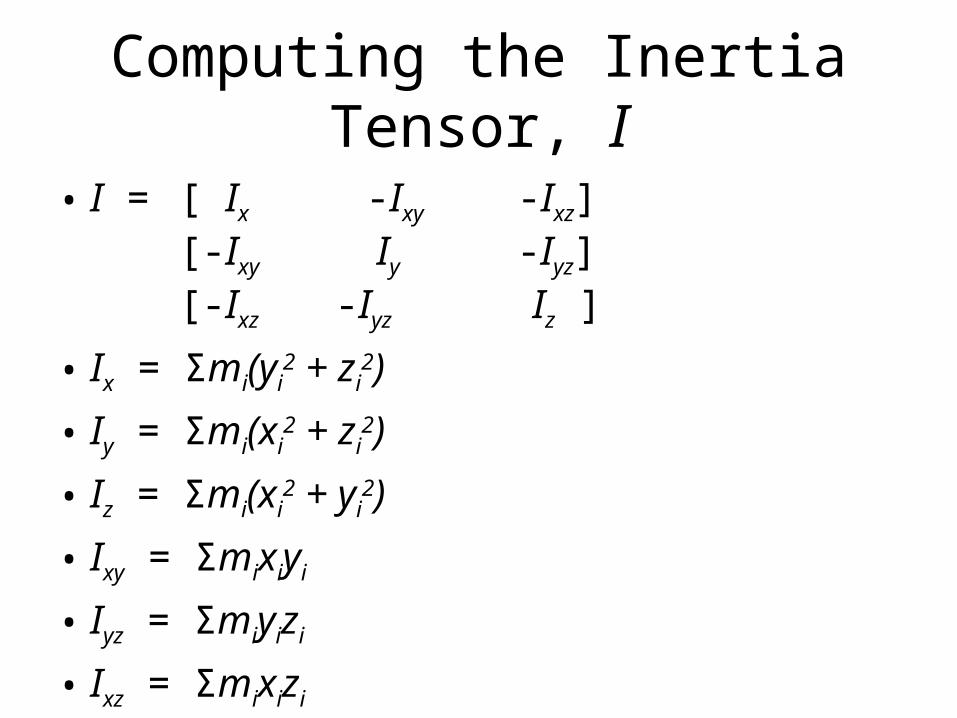
Computing the Inertia Tensor, I
• I = [ Ix -Ixy -Ixz][-Ixy Iy -Iyz][-Ixz -Iyz Iz ]
• Ix = Σmi(yi2 + zi
2)
• Iy = Σmi(xi2 + zi
2)
• Iz = Σmi(xi2 + yi
2)
• Ixy = Σmixiyi
• Iyz = Σmiyizi
• Ixz = Σmixizi
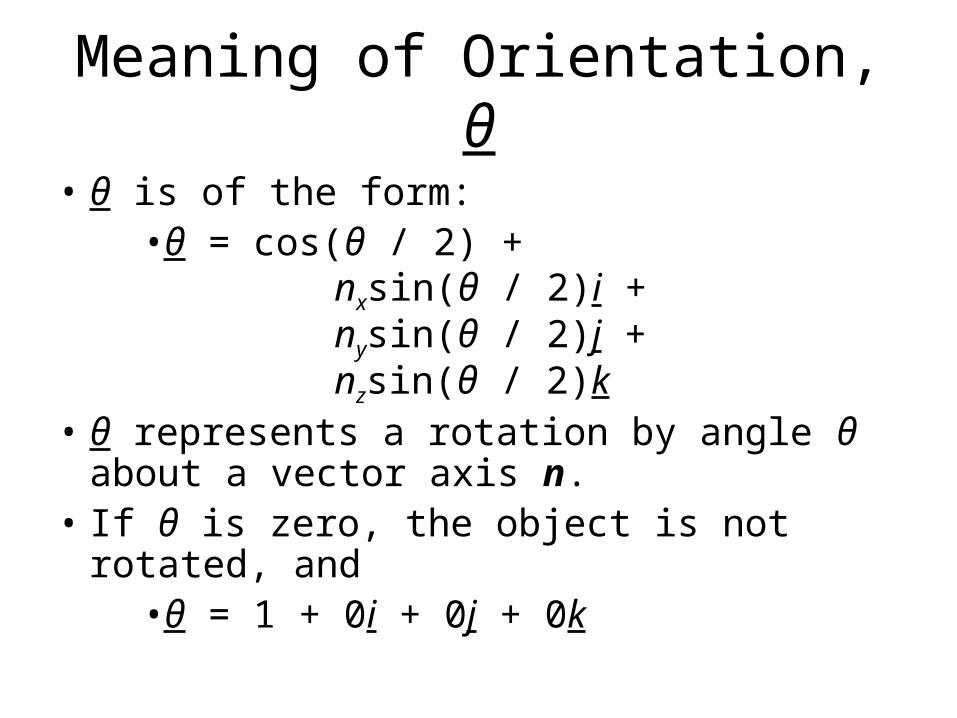
Meaning of Orientation, θ
• θ is of the form:• θ = cos(θ / 2) +
nxsin(θ / 2)i +nysin(θ / 2)j +nzsin(θ / 2)k
• θ represents a rotation by angle θ about a vector axis n.
• If θ is zero, the object is not rotated, and• θ = 1 + 0i + 0j + 0k
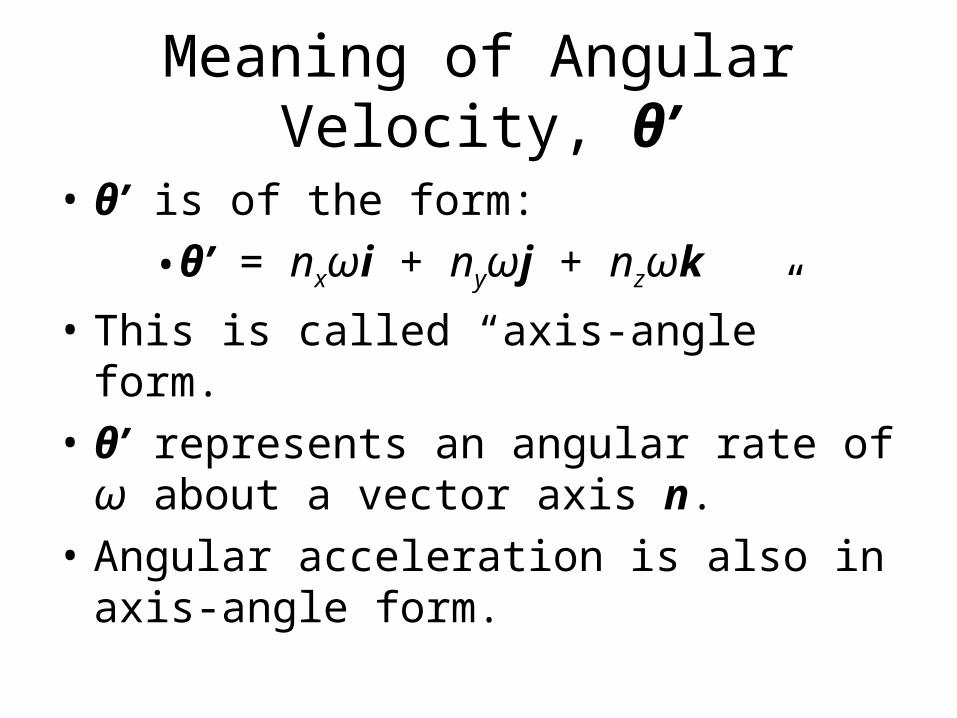
Meaning of Angular Velocity, θ’
• θ’ is of the form:
• θ’ = nxωi + nyωj + nzωk
• This is called “axis-angle” form.• θ’ represents an angular rate of ω about a
vector axis n.
• Angular acceleration is also in axis-angle form.
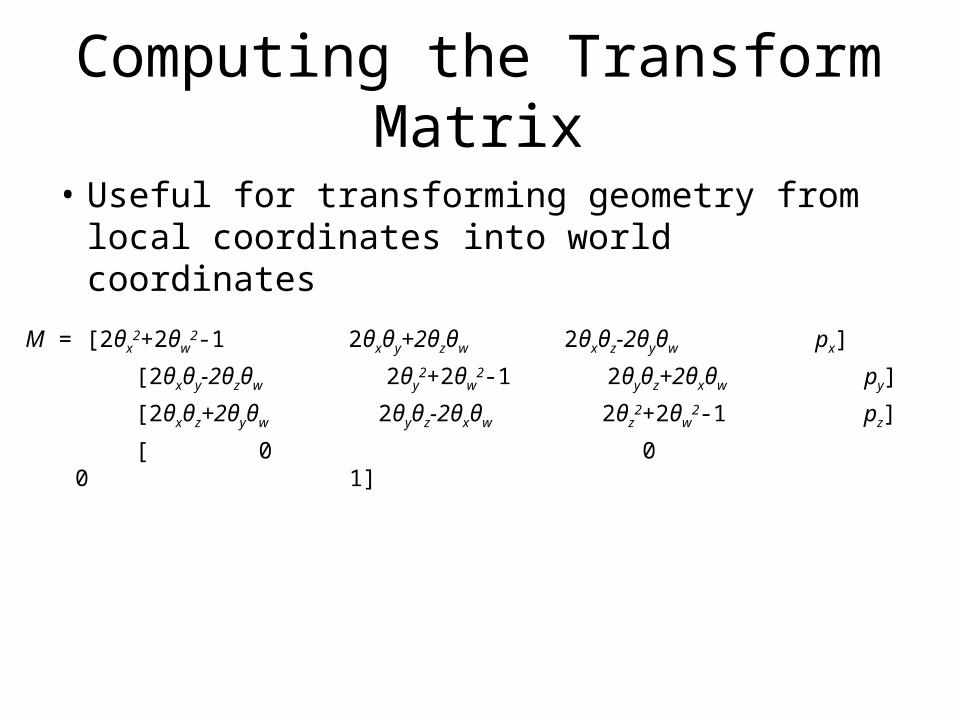
Computing the Transform Matrix
M = [2θx2+2θw
2-1 2θxθy+2θzθw 2θxθz-2θyθw px]
[2θxθy-2θzθw 2θy2+2θw
2-1 2θyθz+2θxθw py]
[2θxθz+2θyθw 2θyθz-2θxθw 2θz2+2θw
2-1 pz]
[ 0 0 0 1]
• Useful for transforming geometry from local coordinates into world coordinates
Updating the Physics
• Find the timestep Δt
• Apply forces and torques
• Integrate
• Collision detection
• Collision resolution
Computing Δt
• Remember the clock value for the previous frame
• Δt = tcurrent - tprevious
Adding Forces and Torques
• Force and Torque Generators– in C++, use classes with virtual methods– in Java, use interfaces– user implements updateForce() or
updateTorque() method
• All force and torque generators should be registered before the frame begins
Adding Forces and Torques
• p” = m-1f
• θ” = I-1τ = I-1[(ppoint - p) x f]
Adding Forces and Torques
• Call the updateForce() or updateTorque() method for every registered force or torque generator
• These add to the force and torque accumulators in the rigid bodies
• f = Σfi
• τ = Στi
Integration
• p” = m-1f
• θ” = I-1τ
• pnext = p + p’Δt
• p’next = p’ + p”Δt
• θnext = θ + (Δt/2)ωθ
• ω = 0 + θ’x i + θ’y j + θ’z k
• θ’next = θ’ + θ”Δt
Integration
• Use Newton’s second law to get p” and θ”
• f = mp”• p” = f / m• p” = m-1f
• τ = Iθ”
• θ” = I-1τ
Integration
• Use the explicit version of Euler’s method to integrate position and velocity
• pnext = p + p’Δt
• p’next = p’ + p”Δt
Integration
• Also use explicit Euler’s method for orientation and angular velocity
• θnext = θ + (Δt/2)ωθ
• ω = 0 + θ’x i + θ’y j + θ’z k
• why it works: magic?
• θ’next = θ’ + θ”Δt
Collision Detection
• Return a list of contacts• Each contact consists of
– references to the two rigid bodies– contact point in world coordinates, q (Vector)– contact normal in world coordinates, n (Vector)– penetration depth, d (real)– coefficient of restituion, c (real)– coefficient of friction, μ (real)
Collision Detection
• Implementation is very complicated
• Two phases:– Coarse Collision Detection– Fine Collision Detection
Collision Detection
• Use spatial data structures to perform coarse collision detection
• Examples of spatial data structures:– bounding volume hierarchy– binary space partitioning tree– quad-tree– oct-tree– grids
• Coarse collision detection eliminates pairs of objects that could not possibly be in contact
Collision Detection
• Run fine collision detection on the remaining pairs of objects
• Fine collision detection generates the list of contacts
• For polygon meshes, two types of contacts must be checked:– point-face contacts– edge-edge contacts