Embed Size (px)
DESCRIPTION
modeling elastohydrodynamics
Citation preview

1
Computational Approaches for Modelling Elastohydrodynamic
Lubrication Using Multiphysics Software
Xincai Tana,b
, Christopher E. Goodyera, Peter K. Jimack
a, Robert I. Taylor
b, and Mark A. Walkley
a
a School of Computing, University of Leeds, Leeds, UK
b Department of Lubrication Science, Shell Global Solutions (UK), Shell Technology Centre, Thornton, UK
Abstract: Elastohydrodynamic lubrication (EHL) modelling plays an important role in engineering design and
analysis since a number of important mechanical components operate under EHL conditions. In this paper
methods are presented for solving both line and point contact cases using multiphysics software. The advantages,
and the overheads, of using such an approach over developing highly specialised, bespoke software are
highlighted. In order to calculate the deformation of the contacts three different methods are developed and their
relative performance is assessed. The advantage of using a nested solution strategy has also been examined. The
flexibility of the multiphysics software approach is highlighted in results involving a complex transient case
modelling an involute gear.
Keywords: Elastohydrodynamic lubrication (EHL), Multiphysics software, Full-system approach
1 INTRODUCTION
An elastohydrodynamic lubrication (EHL) problem involves the coupled response of a moving fluid and a
deforming structure. The lubricant is modelled as a potentially non-Newtonian fluid between the solid structures,
and the fluid action applies dynamic forces on the structure. The fluid and structure are not independent of each
other but constrained by kinematic and dynamic conditions. Hydrodynamic forces applied on the solid elements
will cause structural deformation and deflection. In turn, these deforming structures will affect the
hydrodynamic forces and the flow field.

2
Numerical modelling of EHL cases is common in many industrial situations. This has typically involved
developing bespoke software in order to solve the complex nonlinear partial differential equation system
representing the full problem. This includes a Reynolds equation which models the pressure distribution across
the contact, and a deflection equation which models the deformation of the contacting elements. Auxiliary
equations to fully describe the lubricant properties are also used and a thermal model is also often included. As
the modelling requirements get more complex and computer hardware more efficient, many engineers are no
longer interested in the ultimate computational performance from their software, but in their flexibility. This is
why multiphysics software is starting to be adopted in many industrial applications (e.g., in device development
by Byun et al. [1]; in electromagnetic modelling by Wang et al. [2]; and in microwave food computation by
Knoerzer et al. [3]). Such packages provide a high level interface to describe the problem, and include many
options for creating efficient algorithms in order to produce accurate numerical solutions. Adaptivity in space
and time, such has been included in bespoke EHL software previously, e.g., by Goodyer et al. [4, 5], is also
provided as standard.
There are several competing approaches for calculating the structural deformation efficiently. The most
common method is through integration of the pressure across the lubrication domain. This integral results from
an analytic solution of the elasticity problem on a semi-infinite domain, however it must be evaluated
numerically. Typical examples can be seen in Dowson and his coworkers’ work [6] or Venner and Lubrecht’s
book [7]. For the sake of simplification, this method is termed the Integral Approach (IA). The computational
cost of performing this calculation is , for N points in the domain. As such this is very computationally
expensive, hence for uniform regular grids the application of multilevel multi-integration (MLMI) is introduced
reducing this cost to (see e.g., Brandt and Lubrecht [8] and Venner and Lubrecht [7]). Rather than
solving this integration problem, Habchi et al. [9,10] developed the Full-System Approach (FSA) to solve the
linear elasticity equations for the structural problem, using a finite element method. Since it uses a single solid
structure domain, this method is termed here as the “Single Domain Full-System Approach” (the SD-FSA).
Larsson and his coworkers [11, 12] have also applied the SD-FSA to solve EHL problems of journal bearings in
a hydraulic motor. An advantage of the SD-FSA over the IA is that it provides the internal deflection field for
the contacting elements. The main disadvantage is that it is hard to compete in computational cost against a
well-coded and well-tuned MLMI code.
Both the IA and SD-FSA methods are implemented in a commercial finite element code, COMSOL
Multiphysics [13]. The case studies given are for the classical EHL problem with a Newtonian lubricant,

3
characterised by a pressure-dependent dynamic viscosity and an isothermal compressibility. The standard
Reynolds equation is used to describe the liquid phase in the lubrication gap. An alternative approach is also
considered, using two domains (one for the fluid and the other for the solid structure) to deal with an EHL
problem. This method is termed here as the “Double Domain Full-System Approach” (DD-FSA). The relative
performance of all three methods are contrasted to show how, for even relatively coarse point contact cases,
solution times for the IA are already greater than for the SD-FSA and DD-FSA cases, due to MLMI not being
available.
Efforts have been made to improve the numerical stability of the EHL simulations. For example, Habchi [9]
uses Streamline Upwind Petrov-Galerkin and Galerkin Least Squares methods to minimise the instabilities
which cause oscillatory EHL solutions. This is due to the large variations in the viscosity which result in a
change in the character of the Reynolds equation between the inlet/outlet and the central regions of the contact.
The element-based artificial stabilisation method used in this work is described in Section 3.5.
It is demonstrated that the steady-state model can be easily extended to a transient model without significant
further effort. In order to validate this two previously published surface roughness cases are shown in Section 5,
and this section is concluded with a kinematic case simulating the meshing of an involute gear, involving
transient variation of load, radius and rolling speeds. The paper is concluded in Section 6 with a discussion of
the advantages and disadvantages of applying multiphysics software for EHL modelling.
2 STEADY STATE FORMULATION
The distinguishing features of the three approaches described here: the IA; SD-FSA; and DD-FSA, are the
method of calculation of the deflection and computational domain used for each equation. In each case the
computational model is based upon the use of a reduced geometry which represents the deflection of both
contacting surfaces in a single reduced geometry (see e.g., Dowson and Higginson [6]). In the IA, the deflection
is calculated by using an integral equation which is derived from a semi-infinite (half space) linear elasticity
model of the structure in one single lubrication domain [6]. In the SD-FSA, the deflection is the elastic
deformation at the lubrication boundary of the solid structure domain, on which the linear elasticity equations
have been solved. In the DD-FSA, two separate domains are used, one being for the lubrication calculation at
the surface and the other for the linear elastic behaviour of the solid structure. The deflection is computed
directly from an applied force at the lubrication boundary of the solid structure domain, and then transformed

4
through a projection to the lubrication domain; the applied surface pressure is obtained by solving the Reynolds
equation in the lubrication domain. Further details are provided in Sections 2.2 and 2.4 below.
2.1 Oil film thickness
The oil film thickness depends upon the elastic deformation of the solid structure. It is assumed that the
undeformed solid surfaces are smooth and parabolic, so the non-dimensional oil film thickness is given by
H H ∑ D, (1)
where H is the dimensionless central offset oil film thickness; dim is the dimension of the EHL problem to be
solved, i.e., dim 1 for a line contact case, and dim 2 for a circular point contact case; and D is the
dimensionless deflection. In a Cartesian coordinate system, X X, and X Y.
It is noted that H is an unknown, and is established through an implicit link with the force balance
constraint, which is given by
Ω! "#$%&' 0Ω) . (2)
Here, P is the dimensionless pressure, and Ω- represents the lubrication domain in which the Reynolds equation
(based upon the thin film approximation) is solved. See Fig.1 for both line and point contact examples of the
lubrication domain Ω- ((a) and (b) respectively).
When the SD-FSA approach of Habchi et al. [9,10] is used, the Reynolds equation is applied as a part of the
boundary of the linear elastic region and so Ω- in Eq.2 should be replaced by ∂Ω-, as illustrated in Fig.1(c) and
Fig.1(d) for line and point contact problems, respectively.
For the IA, the deflection D in Eq.1 is calculated, at every independent point, by an integration of the
pressure over the entire lubrication domain. This is given by:
D π ln|X X2| 34 56 PX2dX2, (3a)
for the line contact, where X8 and X9: are the dimensionless inlet and exit/outlet positions. For circular point
contact cases:
D π ;< ′,=′>
?< $ ′>@<=$=′>=A=B 34 56 dX′dY′, (3b)
where YC and YD define the Y-extent of the domain.
For the SD-FSA and the DD-FSA, D is the normal displacement, at the lubrication boundary, of the solid
structure, i.e., D n · U on the lubrication boundary ∂Ω- for both line contact and circular point contact, where

5
U is the displacement vector, and n is the outward pointing normal. Further details of the calculation of this
elastic deformation are given in Section 2.4 below.
2.2 Domains
Fig.1 shows the various domain combinations that have been used for the different approaches considered in this
work. Unstructured finite element meshes were used throughout to model these geometries. Fig.1 shows
example lubrication domains and solid structure domains used in EHL cases for both line and circular point
contacts. For the IA, a single lubrication domain (Ω-) is used for the entire EHL problem; that is, a 1-d domain
for the line contact (Fig.1a), and a 2-d domain for the circular point contact (Fig.1b). For the SD-FSA, a solid
structure domain (ΩG) is used. This is a 2-d domain for the line contact (Fig.1c), and a 3-d domain for the
circular point contact (Fig.1d). The Reynolds equation is treated as a boundary condition on ∂Ω-, which is the
lubricated part of the boundary. The DD-FSA approach is subtly different, however, since two separate
geometries are used for the EHL problem: a lubrication domain for the fluid (Fig.1a or 1b), and a solid structure
domain for the structure (Fig.1c or 1d). This means that the lubrication domain is for the lubricant fluid only and
the solid structure domain is for the structure only, but both domains have interactions with each other, via a
local projection of the pressure from Ω- to ∂Ω- and vertical displacement from ∂Ω- to Ω-. In particular there is
no requirement that the meshes on Ω- and ∂Ω-should be the same.
The main governing equation, the Reynolds equation, is solved in the lubrication domain (for the IA and the
DD-FSA) or on the lubrication domain boundary with the solid structure (for the SD-FSA). In order to make
comparisons at an equivalent level of accuracy for the three approaches, the lubrication elements are defined to
be the mesh elements of the lubrication domain for the IA, or for the DD-FSA; or those of the lubrication
boundary of the solid structure domain for the SD-FSA. Where equivalent numbers of elements are used for
solving the Reynolds equation, then these meshes are referred to as having equal mesh sizes.
2.3 Reynolds equation
The non-dimensional Reynolds equation [14] used in this work is expressed by:
H · IH JJK LM Pf · 0, (4)

6
where ε OPQRS ; P is the pressure; ρ(P) is the density; ηP is the viscosity of the lubricant; H is the oil film
thickness; PV is a penalty factor and P$ min 0, P. The dimensionless speed parameter W is defined by
λ YRZ[\]_Q a` , where uG is the entrainment speed; R is the equivalent radius; bP is the half-width of the
Hertzian contact; and pP is the maximum Hertzian pressure.
In the left-hand side of Eq.4, the first two terms are the conventional form of the Reynolds equation and the
third term is a penalty term which is used to weakly enforce a positive pressure. The penalty method in EHL has
been successfully used, for example, by Wu [15] and Habchi [9]. The penalty implementation is only active for
the region where P<0, and results in very small values of the negative pressure in the cavitation region. The
larger the value of penalty factor PV, the smaller the absolute values of the negative pressure will be, however
taking PV too large can cause ill-conditioning in the numerical calculation. In the simulations presented here,
PV 10# to 10h.
For the finite element discretisation a weak formulation of the modified Reynolds equation is used.
Multiplying Eq.4 with a test function for dimensionless pressure, Pi9Gi , and integrating over the lubrication
domain Ω- gives:
H · IHjklj Ω-Ωm nno LMjklj Ω-Ωm PV · $jklj Ω-Ωm 0. (5)
Since on non-lubrication boundaries, P Pi9Gi 0, after integration by parts Eq.5 becomes:
IH · Hjklj Ω-Ωm LM npqrsqno Ω-Ωm PV · $jklj Ω-Ωm 0. (6)
2.4 Linear elasticity
In both the SD-FSA and the DD-FSA, elastic deformations of the solid structure induced by the force derived
from the pressure, P, on the lubrication boundary are calculated by the equilibrium equation of linear elastic
structural mechanics:
H · t 0, (7)
where t is the dimensionless stress tensor, t u9vw, where u9 is the elasticity matrix and v is the strain
column vector which is a function of the displacement vector, w.
Habchi [9] gives expressions for relating the physical properties commonly used in EHL cases to those
needed for the linear elasticity model. In particular it is necessary to note that the Poisson ratio of the contacting
elements is usually hidden from EHL cases, although this is obviously a very important property for linear

7
elasticity calculations. As such it is worth noting that the equivalent Young’s modulus is given by E9 yzyyz$@y$z, where E and E are the Young’s moduli of structure 1 and structure 2 respectively, and |
and | are Poisson’s ratios of structure 1 and structure 2 respectively (see Dowson and Higginson’s book [6]).
When implementing the SD-FSA and the DD-FSA the non-dimensionalisation used for the elasticity solver
is different to that used for the Reynolds equation. In particular it is important to note that the non-
dimensionalising factor in the Z-direction (i.e. into the surface) is scaled the same as for X and Y. Therefore,
the dimensionless deflection for the oil film thickness transferred from the deformation of the solid structure
domain can be expressed by: D ]^_` U8, where U8 is the normal dimensionless displacement at the lubrication
boundary, ∂Ω-.
It is noted that, when using the DD-FSA method, whilst the size of the lubrication domain needs to be
appropriately scaled to that of the solid structure domain, the nodes in the two meshes do not need to be
coincident. Instead, a simple projection step is used to transfer data between meshes. Case studies show that
computed results of two domains with different meshes have very little difference from those of two domains
with a shared mesh, so long as the meshes spacing is not fundamentally different.
2.5 Boundary conditions
For the Reynolds equation (4) the only boundary condition to be applied is:
P = 0 on ∂ΩVa , (8)
(see Fig.1). If the SD-FSA or DD-FSA methods are being used boundary conditions for the linear elasticity
problem are also required. It is necessary to specify the applied force on all faces, which for these cases is only
non-zero in the contact region matching the lubrication domain:
t · ~ 00P at ∂Ω-, (9)
t · 0 for all other boundaries except for ∂Ω,
The displacement is specified on the bottom boundary:
w at ∂Ω. (10)
Here U is the displacement vector, ∂Ω is the displacement constraint boundary, for example, ∂Ω CD in
Fig.1c, and ∂Ω EFGH in Fig.1d, and ∂Ω- is the lubrication boundary as shown in Figs.1c and 1d.

8
To reduce the size of the computational domain in circular point contact cases, a symmetric boundary may
be applied along the centreline of the domain. In these cases only half of the 2D lubricant film and half of the
3D solid structure are modelled, as shown in Figs.1b and 1d. Compensatory changes must be made to the
deformation and force balance equations. The boundary expressions at the symmetry boundaries are given by:
U 0, t · 0, t · 0, and ; 0. (11)
2.6 Lubricant properties
The Roelands [16] viscosity-pressure relationship is used, which is given, in non-dimensional form, by:
η exp αaZ 1 1 ;a`aZ , (12)
where α is the pressure viscosity index; p is the reference pressure; and z is the Roelands pressure viscosity
index. The dimensionless density is calculated by using the Dowson-Higginson [8] density-pressure
relationship:
ρ #.@.;a`#.@;a` . (13)
Within the multiphysics framework it is little extra effort to include more complicated models.
3 STEADY STATE FEM SIMULATION
The commercial finite element code, COMSOL Multiphysics [13], has been used for the simulations shown in
this work. All solution times for the case studies were run on an Intel Core Duo 2.0GHz laptop with 2GB of
RAM.
The overall numerical solution strategy is based on a discrete, fully coupled, system of nonlinear equations.
A Newton method is applied with direct or iterative linear algebra used at each Newton iteration (see Section 3.4
for further details).
3.1 Initial guess
For steady-state calculations the initial guess is important in terms of accelerating the solution process. The
better the guess, the fewer iterations are needed in order to achieve convergence. Typically, many authors (e.g.,

9
Venner and Lubrecht [7], Goodyer [4]) have used the Hertzian pressure profile as their initial guess for the
pressure:
P ?1 ∑ X when ?∑ X 1,
0 when ?∑ X 1. (14)
An alternative, smoother, initial dimensionless pressure
P 0.368 exp<1 X] ∑ X >, (15)
where X] controls the radius of the initial hump, and is typically chosen to equal X9:, which is the distance of
the right boundary from the centre of the contact, has also been used. In some cases Eq.15 provides a more
robust initial guess, and makes the nonlinear iterations converge faster, compared to using Eq.14.
An initial value of H was chosen in the range of [-0.5, 0.5] however the precise value appears to have very
little influence on the convergence for all approaches.
3.2 Nested solution strategy
The overall expense of the solution algorithm is directly proportional to the number of nonlinear iterations
required. The expense of performing many iterations on a high-resolution grid can be reduced by solving first on
a low-resolution grid to provide an accurate initial guess for the solution. This can be applied recursively on a
sequence of "nested" coarser grids and is similar to the acceleration usually seen during a full multigrid start, e.g.
[7].
In the results that follow the nested solution strategy has been applied. The number of nested solution steps
taken to get each solution is denoted as N i 1, 2, 3, … , which in this paper will always be equal to the mesh
number. Example domains for the ith and (i+1)th nested solution steps (N and N@) for one, two and three
dimensions are shown in Fig.2.
3.3 Stabilisation
Use of the nested solution strategy means that it is critically important to be able to obtain stable pressure
solutions on very coarse grids. In the SD-FSA, Habchi [9] used the Streamline Upwind Petrov-Galerkin (SUPG)
method by Brooks and Hughes [17], the Galerkin Least Squares (GLS) method by Hughes et al. [18] together
with isotropic diffusion (e.g., used by Zienkiewicz [19]) to smooth the oscillatory behaviour in the pressure

10
solution. The results [9] showed that the additional isotropic diffusion terms did not greatly affect the solution
quality other than small improvements around the pressure spike. Thus, in this paper, only isotropic diffusion is
used to control the unstable oscillations that occur. This stabilisation is achieved through the following
modification to the Reynolds equation (Eq.4):
H · IH JJK LM H · ¦l§k¨H Pf · 0. (16)
Here CG is the constant tuning parameter and h9 is the local element size in dimensionless form. In this present
work, CG may be chosen in the range 10$# to 10$© without significantly affecting the solution. It is noted that
the magnitude of the stabilising term tends to zero as the element size tends to zero.
The weak formulation of the modified Reynolds equation (Eq.16) is given by:
εHP · HPi9GidΩ-Ωm ρH ;«3\« dΩ-Ωm CGh9ηHP · HPi9GidΩ-Ωm PV · P$Pi9GidΩ-Ωm 0. (17)
3.4 Implementation
For the 1D lubrication domain a uniform grid was used. For the 2D lubrication domain and the 2D and 3D solid
structure domains, however, unstructured meshes were used, with additional elements within and around the
Hertzian zone of the lubrication domain, and on the lubrication boundaries of the solid structure domains. Linear
triangular elements were used for 2D domains, and linear tetrahedral elements for 3D. Nested solution in 2D and
3D used uniform refinements of the initial unstructured grid until the desired maximum level of refinement was
reached. Fig.2 illustrates typical grids.
For relatively small computational meshes sparse direct linear algebra was used at each Newton iteration,
through the UMFPACK [20-23] software included with COMSOL. For larger meshes, when memory
requirements prevent direct solution, the iterative BiCGStab [24,25] method is used with ILU [26,27]
preconditioning.
Overall convergence of the nonlinear iterations is monitored automatically in COMSOL, based on a user-
defined tolerance. In the present work, values of the error estimate for the termination criterion were chosen in
the range 10$ to 10$©.
4 STEADY-STATE RESULTS

11
In this section a selection of computational results are presented to assess the relative performance of using the
different approaches in COMSOL for both steady-state line and point contact cases. The IA, SD-FSA and DD-
FSA results have been successfully validated against a multilevel finite difference code [4] on a wide variety of
cases in order to ensure that the results are independent of which technique is being applied. These results are
not reported here.
The test cases considered are as defined in Table 1. For the line contact cases the lubrication domain is
¬6, 2 and the solid structure domain was a square ¬30,30 ¬60,0 in which the lubrication boundary (e.g.,
∂Ω- in Fig.1c) had an equal length to the lubrication domain. The point contact example has a lubrication
domain of ¬4.5,1.5 ¬3,3 with a solid-structure domain of ¬30,30 ¬30,30 ¬60,0. The initial coarsest mesh used for the line contact tests () in this section had just 120 elements in the
lubrication domain, with 1834 and 1844 elements in the solid-structure domains for the SD-FSA and DD-FSA
respectively. Three uniform refinements were made in the nested strategy to get the results presented in this
section.
Fig.3 shows a comparison of the results for the dimensionless pressure and oil film thickness with equivalent
numbers of the lubrication elements for the line contact cases with different mesh numbers (&) for the three
approaches. In the first part of Table 2 the results of these calculations on the finest mesh () are summarised.
It is clear that in each case the nested solution strategy is far superior to undertaking a direct solution on the
mesh. Note also that on these comparable meshes the three methods give virtually identical numerical results.
For point contact cases, results are shown in Figure 4, and also summarised in the second part of Table 2.
The agreement is within 2%. The important issue here is the massive increase in the computational cost of the
calculation, as evidenced in the final column, meaning that such a comparison is being made only on a relatively
coarse mesh. It is clear, however, that compared to the line contact cases, where the IA was a substantially
faster method, the SD-FSA and DD-FSA cases are now the right choice, as MLMI is not available. In addition
to a very substantial increase in CPU time when moving from the line contact to the point contact case (even for
similar numbers of degrees of freedom) there is a corresponding increase in the memory requirement. This
further limits the use of fine meshes on a single computer.
Unsurprisingly DD-FSA is often more expensive than SD-FSA. It is worth noting, however, that the DD-
FSA can provide more flexibility in the meshes used for solving the fluid and elasticity problems. This gives
the option to apply local refinement in areas of one domain, without impacting on the number of unknowns in
the other. This is not considered this further in this paper, although it may be of potential value to users.

12
5 EXTENSION TO TRANSIENT LINE CONTACT PROBLEMS
Having demonstrated the performance of the multiphysics software for a selection of steady-state problems the
extension to transient EHL is now described. Variation of load, entrainment velocity and radius of curvature as
well as the inclusion of surface roughness are considered. It is clear from the timings in Table 2 that transient
point contact runs will be very time consuming, therefore here the focus is solely on line contact cases.
5.1 Model
5.1.1 Reynolds equation
Introducing artificial stabilisation and penalty terms as before, the transient dimensionless Reynolds equation to
be solved is:
n°±n² nno ε npno n°±no³´ ´ ´ ´µ´ ´ ´ ´¶·¸l&¹ ºk»¼½¾%l k¿À¸j&½¼ nno CGh9 npno³´´µ´´¶GiÂ_ÃGÂiÄ8
Å$Æpk¼¸¾j» 0. (18)
For the finite element discretisation, multiplying with a test function for pressure, Pi9Gi, Eq.18 becomes:
ρPD · Pi9Gi ε ; · Pi9Gi ρP · Pi9Gi CGh9 ; · Pi9Gi ÅP$ · Pi9Gi 0. (19)
Integrating over the domain Ω gives:
OPD · Pi9GidΩΩ ε ; · Pi9GidΩΩ OP · Pi9GidΩΩ CGh9 ; · Pi9GidΩΩ ÈP$ · Pi9GidΩΩ 0. (20)
Assuming P 0 and Pi9Gi 0 at the boundaries, Eq.20 becomes:
ρPD · Pi9GidΩΩ ε ; · ;«3\« dX
Ω ρH ;«3\« dX
Ω CGh9 ; ;«3\« dΩ
Ω ÈP$ · Pi9GidΩΩ
0. (21)
Boundary conditions: PX8, T PX9: , T 0, ÊT, where X8 and X9: denote the boundaries of the domain
(i.e., Ω X8, X9:. The cavitation condition: PX, T 0, is again imposed weakly via the penalty term.
For a kinematic analysis, a variation in entrainment velocity modifies the equation. The factor defining the
relative change in velocity is defined as:
¦ÀË À²À. (22)
Here u(T) is the transient velocity (m/s) and u(0) is the initial (time T=0) velocity (m/s). Applied to the
Reynolds equation, it gives:

13
n°±n² nno ε npno nÌͲ°±no nno CGh9 npno Å$ 0. (23)
The weak form of Reynolds equation with the factor of velocity is then given by:
ρPD · Pi9GidΩΩ ε ; · ;«3\« dX
Ω C[TρH ;«3\« dX
Ω CGh9 ; ;«3\« dΩ
Ω ÈP$ · Pi9GidΩΩ
0. (24)
5.1.2 Film thickness
The film thickness equation consists of four parts: the basic geometry profile, ; the central offset film
thickness, HT; the deflection, DX, T; and the surface roughness, R8X, T. HX, T HT DX, T R8X, T. (25)
For a kinematic analysis, the oil film thickness is modified as:
HX, T HT ÌÎD DX, T R8X, T, (26)
where C]T is the relative change of radius, defined as:
C]T ]D] (27)
where R(T) is the transient radius and R(0) is the radius at the initial time.
When using the SD-FSA the deflection has been calculated using a static model for the linear elasticity in all
the results given here. This is to enable a direct comparison to be made with the results of other authors using
IA methods, as these do not include a time derivative. In COMSOL using a transient linear elastic model is
straightforward, and such a model could therefore be used to give more accurate transient EHL solutions than
using the standard analytic integral which was derived for steady-state cases.
5.1.3 Force balance
When a kinematic analysis is applied, the equation of force balance becomes:
PXdXΩ
CÏT π 0, (28)
where the relative change in load is expressed as the factor
CÏT ÏDÏ, (29)
where w(T) is the transient load and w(0) is the initial load.

14
5.2 FEM Implementation
COMSOL Multiphysics was again used for the numerical simulations applying the method of lines for the
temporal discretisation. In particular the IDA [28, 29] solver is selected for the EHL equations system. It uses
variable-order variable-step-size backward differentiation formulae (BDF). Since the EHL time-stepping
schemes used are implicit, a nonlinear system of equations must be solved each time step. The sparse direct
linear solver UMFPACK was again used within each Newton iteration. Note that the form of these nonlinear
systems is structurally very similar to those solved in the steady-state cases considered in the previous section.
In practice, an initial and a maximum dimensionless time step are specified (0.01 and 0.1 here, respectively)
along with a relative tolerance and an absolute tolerance for the local error on a single time step (0.01 and 0.001
here, respectively). During the simulation, a time step is accepted if the following condition is satisfied:
ÐÑ∑ |y5|Ò@]|Ó5| Ôz 1 (30)
where A is the absolute tolerance, R is the relative tolerance, and N is the number of degrees of freedom; U is
the solution vector corresponding to the solution at the current time step, and E is the solver’s estimate of the
(local) error in U committed in the time step. The BDF order is restricted to a maximum of 2 for the simulations
in this work.
For each transient case the initial solution at time T = 0 is taken to be the solution of the stationary EHL
problem for the same parameters. This requires computing a steady-state numerical solution (as described in the
previous section) and then saving it to file for re-use in multiple transient runs to provide consistent initial
conditions for the transient simulation.
5.3 Validation and results
Three cases were used for transient analysis. For verification of the solver two prescribed surface roughness
features that have been studied in the literature previously, namely Case 3 from Lu et al. [30]) and Case 4 from
Venner and Lubrecht [31]), were computed. These are followed by a kinematic study of an involute spur gear

15
that varies several of the operating conditions simultaneously (Case 5). Input data for the operating conditions
these cases are listed in Table 3.
5.3.1 Validation
To validate the transient model, two benchmark cases were selected and the predicted results were compared
with the published data. In each case there is a transient surface feature which may be expressed via the locally
undeformed non-smooth geometry, e.g., a dent as used by Venner and Lubrecht [31] as well as Lu et al. [30].
The dimensionless indentation is expressed by:
R8X, T AX, T cos¬2πX X, (31)
and the dimensionless amplitude by:
AX, T A<10$ $ >, (32)
where XT XG D[[\ and A 0.11. The relationship between the location of the surface feature, X, and the dimensionless time, T, is thus given by:
T $ \ÍÍ\ . (33)
The following numerical results were computed on a mesh with 960 elements on the lubrication boundary
and 15604 elements in the elasticity domain (for the SD-FSA case). Fig.5 illustrates the mesh used in the SD-
FSA computations for these transient cases.
Fig.6 shows the predicted results, for dimensionless pressure (P) and dimensionless oil film thickness (H), for
case 3. This should be compared directly with Figures 2 and 3 in Lu et al. [30]. From these figures it can be seen
that the results predicted by this transient model have a good agreement with the results of Lu et al. [30].
Interestingly, for this particular case the IA approach using COMSOL turns out to be much slower than SD-FSA
or DD-FSA. Closer inspection of these timings shows that the IA method takes much longer for each nonlinear
solve to converge at each time step. This is despite COMSOL using the same approach to obtain an initial guess
for each time step (based on extrapolation from the previous steps). For this reason, all subsequent results have
been computed using only the SD-FSA implementation.
The results for Case 4 are shown in Fig.7, again presenting both dimensionless pressure (P) and
dimensionless oil film thickness (H). This should be compared directly with Figures 1 and 2 in (Venner and
Lubrecht [31]). Overall the predicted results in the present work have a good agreement, although for the oil

16
film thickness immediately ahead of the dent the magnitudes vary more strongly here than the results produced
by Venner and Lubrecht [31] at some of the dent locations depicted (e.g., X 0.25). This appears to be the
result primarily of the different solid structure geometries (half space versus finite) although the use of adaptive
time-stepping with local error control may also be a factor.
5.3.2 Kinematic example: involute spur gear
Having validated the transient code against results computed elsewhere for a single variable parameter (the
contact geometry), a more challenging transient problem is now presented: Case 5 in Table 3. Fig.8 shows the
operating condition factors, CÏT, C]T and C[T used for the kinematic case study. This data was obtained
from the performance profile of an A-type involute spur gear from a FZG gear rig test. The FZG is one of the
best known methods for evaluating EHL computations. In this case the load, velocity and radius all vary
simultaneously due to the varying geometry of the contacting surfaces.
The computational and rheological parameters are taken as for the validation results reported above. The 2D
domain is ¬30, 30 ¬60, 0 with the lubrication boundary in the range [-5, 3]. The same resolution of mesh
is used as in Fig.5 and initial conditions are again found by solving the appropriate steady-state EHL problem on
this mesh at T=0.
Fig.9 shows a comparison of the dimensional minimum oil film thickness (§8) predicted by the transient
model and the Pan-Hamrock correlation equation [32]. Both curves are seen to be qualitatively similar.
Differences can, in part, be attributed to comparing a transient numerical simulation to the instantaneous
application of a steady-state correlation equation.
6 DISCUSSION AND CONCLUSIONS
In this paper, three approaches have been used, the traditional Integral Approach (IA), the Single Domain Full-
System Approach (SD-FSA) and the Double Domain Full-System Approach (DD-FSA), to solve
elastohydrodynamic lubrication problems using COMSOL Multiphysics software. The key benefit of both Full-
System approaches (SD-FSA and DD-FSA) is that they directly calculate the elastic deformation of the entire
solid structure providing a user with more information on stresses throughout the contacting elements rather
than just at the solid-lubricant interface. Computationally these approaches also avoid the costly integrations

17
required to calculate the deformation field, albeit at the expense of solving a much larger, but sparse, system of
equations. By comparing the predicted results between these approaches, for steady-state line and circular point
contact cases, and transient line contact cases, it has been shown that there is a good agreement between all three
methods. This implies that for an engineer considering using multiphysics software for standard EHL cases the
choice of which method to use is governed by the solution cost and memory requirements. In particular the
results highlight the difference between solving line contact and point contact steady-state cases within this
framework as, even for similar total numbers of pressure unknowns, the IA approach goes from being the most
efficient method to being by far the worst. This is obviously because of the absence of multilevel multi-
integration in the multiphysics software, rather than a comment on the efficacy of the integral approach.
The validation has been made by comparisons of pressure and film thickness results predicted using the
methods described with data in the literature for both stationary and transient EHL problems. For steady state
cases, the multiphysics software, using equivalent mesh resolutions, is able to reproduce results from both the
authors’ in-house codes and published data. For the transient case, the results presented here agree well with
those in the literature although there were some small differences. Moreover, a complex case study of an
involute spur gear with variation of load, speed and radius, shows that the software predicts values of the
minimum film thickness in good agreement with the Pan-Hamrock correlation.
It must be noted, however, that parameters affecting solution time are multiple, complex, and interwoven.
For example the use of a good initial guess makes a significant difference to the convergence speed of any
steady-state EHL solver. In this work a nested sequence of uniformly refined meshes is used to obtain solutions
on fine meshes for a fraction of the cost of computing the same solution directly on the finest grid. This is
because on the coarsest mesh the small number of elements allows the solution to be computed in an
inexpensive manner. By refining the solution to the next finer mesh the initial solution is very close to the true
solution here. The results presented have shown an increase in speed of at least an order of magnitude through
the use of even three nested steps.
To allow comparison of the results to the standard test cases selected from the literature neither the effect of
using a non-Newtonian lubricant nor heat transfer have been considered in the present work. Inclusion of
behaviours such as these are clearly important for researchers in this field, and adding the equations defining
them into the multiphysics framework will be straightforward. Similarly changes, such as moving from circular
to elliptical contacts, can be included through simple modifications to the existing model.

18
In a commercial multiphysics code, a wide range of tools, functions and solvers can be deployed without the
user needing to understand the intricacies of the algorithms they contain. This black-box approach, with mature
numerical algorithms, is therefore attractive to many classes of scientist, especially when these are combined
with useful pre- and post-processing tools. Where specialist algorithms are not available, such as MLMI in this
work, then many of these packages provide an interface to user-provided functions written in other languages
such as Matlab.
ACKNOWLEDGEMENTS
The authors would like to thank Shell for permission to publish this work, and the EU Marie-Curie Transfer of
Knowledge Scheme for financial support.
REFERENCES
1 Byun, D., Lee, Y., Tran, S.B.Q., Nugyen, V.D., Kim, S., Park, B., Lee, S., Inamdar, N. and Bau, H.H.
Electrospray on superhydrophobic nozzles treated with argon and oxygen plasma. Applied Physics Letters,
2008, 92:093507.1-093507.3.
2 Wang, J.Z., Lucas, G.P. and Tian, G.Y. A numerical approach to the determination of electromagnetic flow
meter weight functions. Measurement Science and Technology, 2007, 18(3):548-554.
3 Knoerzer, K., Regier, M. and Schubert, H. A computational model for calculating temperature distributions
in microwave food applications. Innovative Food Science & Emerging Technologies, 2008, 9(3):374-384.
4 Goodyer, C.E. Adaptive numerical methods for elastohydrodynamic lubrication. PhD thesis, the School of
Computing, the University of Leeds, UK, 2001.
5 Goodyer, C.E. and Berzins, M. Adaptive timestepping for elastohydrodynamic lubrication solvers. SIAM
Journal on Scientific Computing, 2006, 28:626-650.
6 Dowson, D., and Higginson, G.R. Elasto-Hydrodynamic Lubrication: The Fundamental of Roller and Gear
Lubrication. 1966 (Pergamon Press, London).
7 Venner, C.H. and Lubrecht, A.A. Multilevel Methods in Lubrication. 2000 (Elsevier, Amsterdam).
8 Brandt, A. and Lubrecht, A.A. Multilevel matrix multiplication and fast solution of integral equations.
Journal of Computational Physics, 1990, 90(2):348-370.

19
9 Habchi, W. A full-system finite element approach to elastohydrodynamic lubrication problems: application to
ultra-low-viscosity fluids. PhD thesis, LaMCoS, INSA de Lyon, France, 2008.
10 Habchi, W., Eyheramendy, D., Vergne, P. and Morales-Espejel, G. A full-system finite element approach
of the elastohydrodynamic line/point contact problem. Journal of Tribology, 2008, 130(2):021501.1-
021501.10.
11 Larsson, R. Modelling the effect of surface roughness on lubrication in all regimes. Tribology International,
2009, 42(4):512-516.
12 Isaksson, P., Nilsson, D. and Larsson, R. Elasto-hydrodynamic simulation of complex geometries in
hydraulic motors. Tribology International, 2009, 42(10):1418-1423.
13 COMSOL. COMSOL Multiphysics Modeling Guide: COMSOL 3.5, September 2008, (COMSOL).
14 Reynolds, O. On the theory of lubrication and its application to Mr. Beauchamp tower's experiments,
including an experimental determination of the viscosity of olive oil. Philosophical Transactions of the
Royal Society of London, 1886, 177:157-234.
15 Wu, S.R. A penalty formulation and numerical approximation of the reynold-hertz problem of
elastohydrodynamic lubrication. International Journal of Engineering Science, 1986, 24(6):1001-1013.
16 Roelands, C.J.A. Correlation aspects of viscosity-temperature-pressure relationships of lubricating oils.
PhD thesis, Delft University of Technology, The Netherlands, 1966.
17 Brooks A. N. and Hughes T. J. R. Streamline Upwind/Petrov Galerkin Formulations for Convective
Dominated Flows with Particular Emphasis on the Incompressible Navier-Stokes Equations. Computer
Methods in Applied Mechanics and Engineering, 1982, 32:199-259.
18 Hughes T. J. R., Franca L. P. and Hulbert G. M. A New Finite Element Formulation for Computational
Fluid Dynamics: VII. The Galerkin Least Squares Method for Advective Diffusive Equations. Computer
Methods in Applied Mechanics and Engineering, 1989, 73:173-189.
19 Zienkiewicz O. C. and Taylor R. L. The Finite Element Method, Volume 3, Fluid Dynamics, 5th
edition”, Butterworth & Heinmann, England, 2000.
20 Davis, T. A. and Duff, I.S. An unsymmetric-pattern multifrontal method for sparse LU factorization. SIAM
Journal on Matrix Analysis and Applications, 1997, 18(1):140-158.
21 Davis, T. A. and Duff, I.S. A combined unifrontal/multifrontal method for unsymmetric sparse matrices.
ACM Transactions on Mathematical Software, 1999, 25(1):1-19.

20
22 Davis, T. A. A column pre-ordering strategy for the unsymmetric-pattern multifrontal method. ACM
Transactions on Mathematical Software, 2004, 30(2):165-195.
23 Davis, T. A. Algorithm 832: UMFPACK, an unsymmetric-pattern multifrontal method. ACM Transactions
on Mathematical Software, -2004, 30(2):196-199.
24 Greenbaum, A. Iterative Methods for Solving Linear Systems. Frontiers in Applied Mathematics, 1997
(SIAM).
25 Van Der Vorst, H.A. A fast and smoothly converging variant of Bi-CG for the solution of nonsymmetric
linear systems. SIAM Journal on Scientific and Statistical Computation, 1992, 13:631-644.
26 Gilbert, J.R. and Toledo, S. An assessment of incomplete-LU preconditioners for nonsymmetric linear
systems. Informatica, 2000, 24:409–425.
27 Saad, Y. Iterative Methods for Sparse Linear Systems. Second Edition, 2003 (SIAM).
28 Hindmarsh, A.C., Brown, P.N., Grant, K.E., Lee, S.L., Serban, R., Shumaker, D.E. and Woodward,
C.S. SUNDIALS: suite of nonlinear and differential/algebraic equation solvers. ACM Transactions on
Mathematical Software, 2005, 31:363-396.
29 Hindmarsh, A.C., Serban, R. and Collier, A. User Documentation for IDA V2.6.0. Center for Applied
Scientific Computing, Lawrence Livermore National Laboratory, USA, 2009.
30 Lu, H., Berzins, M., Goodyer, C.E. and Jimack. P.K. High order discontinuous Galerkin method for EHL
line contact problems. Communications on Numerical Methods in Engineering, 2005, 21:643–650.
31 Venner, C.H. and Lubrecht, A.A. Transient analysis of surface features in an EHL line contact in the case
of sliding. Transaction of the ASME, Journal of Tribology, 1994, 116:186-93.
32 Pan, P. and Hamrock, B.J. Simple formulas for performance parameters used in elastohydrodynamically
lubricated line contacts. Journal of Tribology, 1989, 111:246-251.
NOMENCLATURE
Ø absolute tolerance; dimensionless amplitude of surface feature
Ù± Hertzian contact radius, m
¦l O(1) tuning parameter for isotropic diffusion

21
¦ºË transient non-dimensional scaling factor for radius¦ÀË transient non-dimensional scaling factor
for velocity
¦ÚË transient non-dimensional scaling factor for load
ÛÜ dimension of the EHL problem
D dimensionless deflection
Ýk elasticity matrixÞ estimate of the local error of the solver
Þ Young’s Modulus of the structure 1, N/m
Þ Young’s Modulus of the structure 2, N/m
Þk equivalent Young’s Modulus, N/m
à± Hamrock-Dowson dimensionless material parameter
§k local dimensionless element size
H dimensionless oil film thickness
H dimensionless central offset of the oil film thickness Û time step
á outward pointing normal
N number of degrees of freedom
& number of nested solution stepsO Bachmann-Landau notation, or big O notation
pP maximum Herzian pressure, Pa
p reference pressure, p 1.98 10h Pa.
P dimensionless pressure
P$ negative part of the dimensionless pressure
Å penalty factor
jklj finite element test function for dimensionless pressureã relative tolerance
ã¼ surface roughness profile
ão equivalent radius in X direction, m
T dimensionless time
u surface velocity of structure 1, m/s
u surface velocity of structure 2, m/s
uG sum of velocities of surfaces 1 and 2, m/s
ä dimensionless displacement vector
å± Hamrock-Dowson dimensionless velocity parameter

22
å¼ normal dimensionless displacement of the lubrication boundaryw unit applied load, æ' or
æ'
ç± Hamrock-Dowson dimensionless load parameterX dimensionless coordinate
X dimensionless position of surface feature
X8 dimensionless position of the inlet point/line
X9: dimensionless position of the outlet point/line XG dimensionless position of surface feature at starting
point (at Ë 0)
Y dimensionless coordinate
YC dimensionless position of the bottom point
YD dimensionless position of the top point
z Roelands pressure viscosity index
α pressure viscosity index, 1/Pa JΩè displacement constraint boundary
JΩ! lubrication boundary of the solid structure domain
JΩé symmetry boundary
JΩÅê cavitation boundary
I Dimensionless parameter in the Reynolds equation
v strain column vector
η dimensionless viscosity of lubricant
η reference viscosity, Pa.s λ dimensionless speed parameter
| Poisson’s ratio of structure 1
| Poisson’s ratio of structure 2
ρ dimensionless density of the lubricant
ρ density at ambient pressure, ëì'Q í stress tensor
Ω! lubrication domain
Ωé solid structure domainΩ computational domain
ABBREVIATIONS
DD-FSA double domain full-system approach
EHL elastohydrodynamic lubrication
FEM finite element method

23
GLS Galerkin Least Squares method
IA integral approach
MLMI multi-level multi-integration
SD-FSA single domain full-system approach
SUPG Streamline Upwind Petrov-Galerkin method

24
Figure and Table Captions
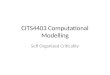
Fig.1 Example lubrication and solid structure domains used in EHL cases for both line contact and circular point
contact. (a) lubrication domain for line contact; (b) lubrication domain for circular point contact; (c)
solid structure domain for line contact; and (d) solid structure domain for circular point contact.
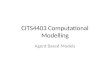
Fig.2 Example domains for the ith and (i+1)th nested solution steps (N and N@) for line and point contact
cases (the dashed lines indicating data transformation areas in the SD- and DD-FSA).
Fig.3 A comparison of dimensionless pressure and dimensionless oil film thickness with equivalent numbers of
lubrication elements for the line contact case at different mesh levels (Ni in the figure) for the three
approaches.
Fig.4 A comparison of dimensionless pressure and oil film thickness for a circular point contact case at different
mesh levels (N0 and N1) for the three approaches.
Fig.5 Mesh used in the SD-FSA computations for these transient cases
Fig.6 Dimensionless pressure (P) and dimensionless oil film thickness (H) to be compared against Figs. 2 and 3
in [30].
Fig.7 Dimensionless pressure (P) and dimensionless oil film thickness (H) to be compared against Figs.1 and 2
in [31].
Fig.8 Operating condition factors, CÏT, C]T and C[T used for the kinematic case study (Case 5)
Fig.9 A comparison of dimensional minimum oil film thickness (h8) predicted by the transient model and
from the Pan-Hamrock correlation equation

25
Table 1 Input data used for the steady-state cases
Table 2 Number of elements in each domain, summary results and solution time for steady state cases using
mesh for Case 1 and for Case 2
Table 3 Input data used for the transient cases

(a)
(c)
Fig.1 Example lubrication and solid structure domains used in EHL cases for both line contact and circular
point contact. (a) lubrication domain for line contact; (b) lubrication domain for circular point contact;
(c) solid structure domain for line contact; and (d) solid structure domain for circular point contact.
(b)
(d)
Example lubrication and solid structure domains used in EHL cases for both line contact and circular
ication domain for line contact; (b) lubrication domain for circular point contact;
(c) solid structure domain for line contact; and (d) solid structure domain for circular point contact.
26
Example lubrication and solid structure domains used in EHL cases for both line contact and circular
ication domain for line contact; (b) lubrication domain for circular point contact;
(c) solid structure domain for line contact; and (d) solid structure domain for circular point contact.

27
Mesh N N@
1d line-contact
lubrication
domain
2d line-contact
solid structure
domain
2d point-contact
lubrication
domain
3d point-contact
solid structure
domain
Fig.2 Example domains for the ith and (i+1)th nested solution steps (N and N@) for line and point contact
cases (the dashed lines indicating data transformation areas in the SD- and DD-FSA).

28
The IA The SD-FSA The DD-FSA D
imen
sio
nle
ss p
ress
ure
(P
)
P e
nti
re
1.00
0.45
-0.10
-6 -2 2 -6 -2 2 -6 -2 2
P c
entr
e
0.995
0.980
0.965
-0.2 0.05 0.3 -0.2 0.05 0.3 -0.2 0.05 0.3
P s
pik
e
0.88
0.82
0.76 0.6 0.7 0.8 0.6 0.7 0.8 0.6 0.7 0.8
Dim
ensi
on
less
oil
fil
m t
hic
kn
ess
(H)
H e
nti
re
16
8
0
-6 -2 2 -6 -2 2 -6 -2 2
H c
entr
e
0.169
0.167
0.165
-0.7 0.01 0.72 -0.7 0.01 0.72 -0.7 0.01 0.72
H m
inim
um
0.139
0.138
0.137
0.86 0.91 0.96 0.86 0.91 0.96 0.86 0.91 0.96
X position
Fig.3 A comparison of dimensionless pressure and dimensionless oil film thickness with equivalent numbers of
lubrication elements for the line contact case at different mesh levels (Ni in the figure) for the three
approaches.
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3
N1
N2
N3

The IA
Dim
ensi
on
less
pre
ssu
re
(P)
P e
nti
re
P c
entr
e li
ne
1.1
0.5
-0.1
-4.5 -1.5
P z
oo
m-i
n
1.1
0.8
0.5
0.0 0.5
Dim
ensi
on
less
oil
fil
m t
hic
kn
ess
(H)
Her
tzia
n z
on
e
H
-1 0
H c
entr
e li
ne
9.0
4.5
0.0
-4.5 1.5
H z
oo
m-i
n
0.25
0.19
0.13
-1.2 0.0
Fig.4 A comparison of dimensionless pressure and oil film thickness
mesh levels (N0 and N1) for the three approaches
N0
N1
N0
N1
N0
N1
The SD-FSA The
1.5 -4.5 -1.5 1.5 -4.5
1.0 0.0 0.5 1.0 0.0
1 -1 0 1 -1
1.5 -4.5 1.5 1.5 -4.5
1.2 -1.2 0.0 1.2 -1.2
X position
A comparison of dimensionless pressure and oil film thickness for a circular point contact
for the three approaches.
N0
N1
N0
N1
N0
N1
N0
N1
N0
N1
N0
N1
29
The DD-FSA
-1.5 1.5
0.5 1.0
0 1
1.5 1.5
0.0 1.2
circular point contact case at different
N0
N1
N0
N1
N0
N1
N0
N1

30
Fig.5 Mesh used in the SD-FSA computations for these transient cases

31
Initial îï . ð . ñ P
an
d H
1.5
1.0
0.5
0 îï .ò . ñ . ð
P a
nd
H
1.5
1.0
0.5
0 -2 -1 0 1 -2 -1 0 1 -2 -1 0 1
X
Initial îï . ð . ñ
P a
nd
H
1.5
1.0
0.5
0
îï .ò . ñ . ð
P a
nd
H
1.5
1.0
0.5
0 -2 -1 0 1 -2 -1 0 1 -2 -1 0 1
X
P
H
P
H
P
H
P
H
P
H
P
H
P
H
P
H
P
H
P
H
P
H
P
H

32
Fig.6 Dimensionless pressure (P) and dimensionless oil film thickness (H) to be compared against Figs. 2 and 3
in [30].

33
Initial îó . ôõ . õ
P
2
1
0
0.2
0.1
0
H
îó . öõ . . õ
P
2
1
0
0.2
0.1
0
H
-4 -2 0 2 -4 -2 0 2 -4 -2 0 2
X
Fig.7 Dimensionless pressure (P) and dimensionless oil film thickness (H) to be compared against Figs.1 and 2
in [31].

34
Fig.8 Operating condition factors, CÏT, C]T and C[T used for the kinematic case study (Case 5)
0
0.4
0.8
1.2
1.6
0 20 40 60 80
Cw
(T),
CR
(T),
Cu
(T)
Non-dimensional time, T
Cw(T)
Cu(T)
CR(T)

35
Fig.9 A comparison of dimensional minimum oil film thickness (h8) predicted by the transient model and
from the Pan-Hamrock correlation equation
4.8E-7
5.2E-7
5.6E-7
6.0E-7
6.4E-7
0 0.0005 0.001 0.0015 0.002 0.0025
hm
in, m
time, s
Present
Pan-Hamrock

36
Table 1 Input data used for the steady-state cases
Parameter Case 1: Line contact Case 2: Circular point contact
Equivalent Young’s modulus E9 2 10 Pa E9 2.26 10 Pa
Poisson’s ratio | | 0.285 | | 0.30
Radius of the contact R 0.0125 m R 0.011 m
Applied load per unit length/area w 5 10 N/m w 13.226 /Ü
Entrainment velocity uG 0.2 m/s uG 1 m/s Reference viscosity η 5.7226 10$ Pa. s η 4 10$ Pa. s Reference pressure coefficient of
viscosity
α 2.2303 10$h Pa$ α 2.20 10$h Pa$
Reference pressure p 1.96 10h Pa p 1.96 10h Pa
Density at ambient pressure ρ 8.5844 10 kg/m ρ 1 10 kg/m
Roelands pressure parameter z 0.64191 z 0.68

37
Table 2 Number of elements in each domain, summary results and solution time for steady state cases using
mesh for Case 1 and for Case 2
Approach Elements in
lubrication
domain
Elements in
solid
structure
domain
Pressure
spike height
Minimum
film
thickness
Central
film
thickness
Solution
time (s)
Non-
nested
Solution
time (s)
nested
– Case 1 (line contact)
IA 960 - 0.8543 0.1374 0.1663 137.33 25.5
SD-FSA 960 117376 0.8532 0.1374 0.1662 1131.31 83.8
DD-FSA 960 118016 0.8537 0.1374 0.1662 962.81 102.3
– Case 2 (circular point contact)
IA 2488 - 1.002 0.109 0.1842 100335 8064
SD-FSA 2384 95064 1.032 0.111 0.1885 340889 1111
DD-FSA 2664 110562 1.016 0.111 0.1853 55354 2232

38
Table 3 Input data used for the transient cases
Parameter Case 3
Lu et al. [30]
Case 4
Venner et al. [31]
Case 5
(gear)
Equivalent Young’s module Þk, Pa 2.28 10 2.26 10 2.28 10
Poisson ratio | 0.285 0.285 0.285
Pressure viscosity index û, 1/Pa 2.17 10$h 2.2 10$h 2.17 10$h
Roelands pressure viscosity index ü 0.6 0.68 0.6
Reference viscosity ¨, Pa s 0.04 0.04 0.04
Initial velocity of surface 1 ý0, m/s 1.455 1.455 2.43
Initial velocity of surface 2 ý0, m/s 0.485 0.485 3.68
Initial sum of velocities ýl0, m/s 1.94 1.94 6.11
Initial reduced radius ão0, m 0.113 0.0139 0.00743
Initial applied load þ0, Pa 1.04 10Y 1.56 10Y 2.78 10#
Initial Hertzian contact radius Ù±0, m 1.14 10$ 4.95 10$ 1.52 10$
Initial maximum Hertzian pressure ±0, Pa 5.76 10h 2.0 10 1.17 10
Reference pressure 1.98 10h 1.96 10h 1.98 10h
Density at ambient pressure L 1.0 10 1.0 10 1.0 10
Dimensionless speed parameter W 6.9 10$ 3.7 10$ 2.0 10$
Hamrock-Dowson dimensionless load parameter ç± 4.0 10$# 4.97 10$ 2.21 10$
Hamrock-Dowson dimensionless velocity parameter å± 1.5 10$ 1.24 10$ 7.21 10$
Hamrock-Dowson dimensionless material parameter à± 4942 4970 4942
Initial dimensionless position of surface feature K -2.0 -2.5
Dimensionless inlet position K&¼ -5.0 -4.0 -5.0
Dimensionless outlet/exit position Kk 1.5 1.5 3.0
Penalty factor Å 1.0 10© 1.0 10h 1.0 10©
O(1) tuning parameter ¦l 5.0 10$ 5.0 10$ 5.0 10$