Embed Size (px)
Citation preview

Computational Analysis of Rigid Pavement Profiles
A THESIS
SUBMITTED TO THE FACULTY OF THE GRADUATE SCHOOL
OF THE UNIVERSITY OF MINNESOTA
BY
Daniel Paul Franta
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
MASTER OF SCIENCE
Professor Steven F. Wojtkiewicz, Professor Lev Khazanovich
June 2012

© Daniel Paul Franta 2012

i
ACKNOWLEDGEMENTS
I would like to thank my advisor, Professor Steven F. Wojtkiewicz, for all the assistance, guidance,
patience, and support he has provided during my time as a graduate student at the University Of
Minnesota – TC. His wisdom reaches far beyond academics and I feel extremely fortunate to have him as
my advisor. Without his guidance, I would not be where I am today. I would also like to thank Professor
Lev Khazanovich, for admitting me into the civil engineering graduate school, finding me financial
support, and assisting me with completing my graduation requirements. His vast knowledge of concrete
pavements is what made this thesis possible.
A special thank you goes out to those who assisted in the funding and development of this project. I
would like to acknowledge the financial support provided through the FHWA/MnDOT project entitled,
“Determination of the Effective Built-In Curling of Concrete Pavements.” From the Federal Highway
Administration, I would like to thank Tom Yu. From MnDOT, I would like to thank a host of people
including Maureen Jensen, Bernard Izevbekhai, Steve Olson, Bob Strommen, Tom Burnham, Ally Akkari
and Tim Nelson.
A thank you should also go out to my peers who contributed to my graduate academic experience. Their
names are: Andrea Azary, Kyle Hoegh, Priyam Saxena, Mary Vancura, Ben Dymond, Andrew Gastineau,
Brock Hedegaard, Rita Lederle, Krista Morris, Brandon Day, and Kairat Tuleubekov. They have played
an integral role in my education, and I am forever grateful for their companionship and support.
I also thank my parents, Mark and Mary, and my siblings, Teresa, John, Joseph, David and Anne. Their
support has allowed me to pursue this degree and experience. There are no words to describe how much
they mean to me. To them, I dedicate this thesis.

ii
ABSTRACT
The analysis of concrete pavement profiles has been an important part of pavement management for
years. “Built-in” curling is a key input parameter for the Mechanistic-Empirical Pavement Design Guide
(MEPDG). Built-in curling pertains to permanent curvatures found in concrete slabs due to early age
properties. Currently, no comprehensive procedure exists to model or estimate the long-term, effective
built-in curling.
Curling refers to the way a concrete slab changes curvature due to an internal temperature gradient.
Concrete surface profiles possess and show curl within slabs. However, due to the magnitudes of
deflection from temperature gradients, extracting these temperature induced curl profiles can be difficult.
For example, for a 12’x15’, 10” thick, single concrete slab containing a 15°F temperature gradient,
computational models predict a maximum deflection of approximately 0.0174 inches, transversely from
the middle of a slab to the edge. This small magnitude of deflection, coupled with the error involved in
recording road profile data out in the field, makes it difficult to find consistencies in data that is not
generated artificially.
A Hilbert-Huang Transform (HHT) based algorithm was developed to analyze both field road profile data
and artificially generated slab profile data in the hope that smoothed, consistent profiles could be
extracted from noise-filled data sets using empirical mode decomposition (EMD). The application of this
algorithm to concrete surface profiles resulted in the successful separation of the intrinsic mode functions
contained within the data. The separation revealed intrinsic mode functions correlating to “noise”, “curl”
and “base trend” data. ISLAB2005 artificial slab profiles, containing randomly induced error, were
clearly identified. Trends in ALPS2, Minnesota IRI, Wisconsin LTPP, Georgia LTPP, Utah LTPP, and
Arizona LTPP sections were also found. Arizona LTPP slab profiles were shown to contain consistent
“curl” deflections for the same slab over a 20 month time-span and during both winter and early fall
seasons. The consistent slab shape is likely due to early age built-in curl. Some of the profiles analyzed
appeared to be dominated by noise.
Artificial pavement profiles, corresponding to wide ranges of temperature gradients (-30°F to +30°F or ≈
-34.4°C to -1.1°C), were generated using the finite element program ISLAB2005. Cubic splines were
applied through FORTRAN software to build a computationally efficient slab surface model, capable of
back-calculating temperature gradients through artificially generated slab profiles. Optimization

iii
packages in DAKOTA used this FORTRAN model to back-calculate temperature gradients for
ISLAB2005 slab profiles with known thicknesses, lengths and surface profiles. ISLAB2005 slab profiles
containing induced random error were successfully smoothed by applying the developed Hilbert-Huang
based profile analysis algorithm, and their corresponding temperature gradients were accurately back-
calculated. Real road slab profiles were also smoothed using the Hilbert-Huang based algorithm, but the
magnitudes of their deflections correlated to extreme temperature gradients in ISLAB2005. The large
deflections are likely due to built-in curl, and the correlating extreme temperature gradient from
ISLAB2005 is due to the model not taking into account early age built-in curl during temperature
deflection estimations.

iv
Table of Contents
ACKNOWLEDGEMENTS ........................................................................................................................... i
ABSTRACT .................................................................................................................................................. ii
LIST OF TABLES ................................................................................................................................ v
LIST OF FIGURES ............................................................................................................................. vi
CHAPTER 1: INTRODUCTION AND LITERATURE REVIEW ............................................................. 1
1.1 Introduction ................................................................................................................................... 1
1.2 Literature Review .......................................................................................................................... 3
CHAPTER 2: ANALYZING PAVEMENT SURFACE PROFILES USING THE HILBERT- HUANG
TRANFORM .............................................................................................................................................. 14
2.1 Overview ........................................................................................................................................... 14
2.2 Intrinsic Mode Functions .................................................................................................................. 16
2.3 Residues ............................................................................................................................................ 24
2.4 IMF Grouping ................................................................................................................................... 29
2.5 Results ............................................................................................................................................... 41
CHAPTER 3: BACK-CALCULATING TEMPERATURE GRADIENTS ............................................... 74
3.1 Overview ........................................................................................................................................... 74
3.2 Profile Analysis ................................................................................................................................. 80
3.3 Results ............................................................................................................................................... 85
CHAPTER 4: CONCLUSIONS AND DISCUSSION ............................................................................... 89
BIBLIOGRAPHY ....................................................................................................................................... 91
APPENDIX A ............................................................................................................................................. 99

v
LIST OF TABLES
Table 1: The classification and values of the critical points identified in Figure 2.5. ........................ 20
Table 2: A statistical analysis for quadratic polynomial and cubic spline surface profiles compared
to ISLAB2005 outputs. ............................................................................................................................. 77

vi
LIST OF FIGURES
Figure 1.1: An eleven slab surface profile from the Arizona LTPP section number 0215. ................. 1
Figure 1.2: A fine ISLAB2005 mesh on a 12x15 foot (≈ 3.7 by 4.6 meter) slab with a negative
temperature gradient. ............................................................................................................................... 10
Figure 1.3: A coarse ISLAB2005 mesh on a 12x15 foot (≈ 3.7 by 4.6 meter) slab with a positive
temperature gradient. ............................................................................................................................... 10
Figure 2.1: A raw profile sample from ALPS2, y(x)original. ................................................................... 16
Figure 2.2: The raw ALPS2 profile y(x)original (—) with a corresponding linear regression trendline
y(x)fit (o). ..................................................................................................................................................... 17
Figure 2.3: The ALPS2 profile shifted about the x-axis. ...................................................................... 18
Figure 2.4: The required formatting HHT MATLAB program input file func1.txt. ......................... 19
Figure 2.5: Critical points for the sample ALPS2 profile ( * = maxima, o = minima). ...................... 20
Figure 2.6: The first computed upper envelope (U1(x)) (o) and lower envelope (L1(x)) (+), around
the original shifted profile (—). ............................................................................................................... 21
Figure 2.7: The first component, h1(x). .................................................................................................. 22
Figure 2.8: The first IMF (c1(x)) for the ALPS2 profile. ...................................................................... 23
Figure 2.9: The first residue, r1(x), for the ALPS2 profile. .................................................................. 24
Figure 2.10: The fourth and final residue for the sample ALPS2 profile. .......................................... 25
Figure 2.11: The sum of all IMFs and final residue (+) with the original sample ALPS2 profile (o).
.................................................................................................................................................................... 26
Figure 2.12: A basic flow-chart for the automated MATLAB EMD sifting process. ........................ 27
Figure 2.13: The five-slab Wisconsin LTPP profile shifted about the x-axis. .................................... 30
Figure 2.14: The first NFUN for the five slab Wisconsin LTPP profile. ............................................. 30
Figure 2.15: The first residue (—) with the shifted Wisconsin profile (o). ......................................... 31
Figure 2.16: The second IMF and second member of the NFUN group. ............................................. 32
Figure 2.17: The second residue (—) with the original shifted profile (o). ......................................... 33
Figure 2.18: The third IMF and first and only member of the CFUN group. .................................... 34
Figure 2.19: The third residue (—) with original shifted profile (o). .................................................. 35
Figure 2.20: The fourth IMF and first member of the BFUN group. ................................................. 35
Figure 2.21: The final residue (BFUN) (—) with the original shifted profile (o). .............................. 36
Figure 2.22: The original middle slab profile extracted from the shifted five-slab profile. .............. 37
Figure 2.23: The NFUN group for the middle slab of the Wisconsin profile. ..................................... 37
Figure 2.24: The CFUN group. ............................................................................................................... 38
Figure 2.25: The BFUN group (—) with the original noisy profile (o). ............................................... 39
Figure 2.26: The CFUNs+BFUNs (—) with the original shifted profile (o). ....................................... 39
Figure 2.27: The original noisy profile with induced error (—) and the original smooth profile from
ISLAB2005 (o). .......................................................................................................................................... 42
Figure 2.28: The NFUN group for the single ISLAB2005 slab. ........................................................... 42
Figure 2.29: The BFUN+CFUN group (—) with the original noisy profile (o). ................................. 43
Figure 2.30: The five slab ISLAB2005 profile before shifting and error induction. .......................... 44
Figure 2.31: The shifted noise induced profile. ..................................................................................... 45
Figure 2.32: The NFUN group for the multiple ISLAB2005 slabs. ..................................................... 45

vii
Figure 2.33: The CFUN group for multiple ISLAB2005 slab configuration. ..................................... 46
Figure 2.34: The BFUN group (—) with the shifted noisy profile (o). ................................................ 47
Figure 2.35: The CFUN+BFUN group (—) with the shifted noisy profile (o). ................................... 47
Figure 2.36: The original shifted Arizona LTPP profile. ..................................................................... 48
Figure 2.37: The three middle slabs from the original Arizona LTPP profile. .................................. 49
Figure 2.38: The NFUN group for the Arizona profile. ........................................................................ 49
Figure 2.39: The CFUN group for the Arizona profile. ........................................................................ 50
Figure 2.40: The BFUN group (—) with the original profile (o) for Arizona. .................................... 51
Figure 2.41: The CFUNs+BFUNs (—) with the original profile (o). ................................................... 51
Figure 2.42: The original shifted Georgia LTPP profile. ..................................................................... 52
Figure 2.43: The NFUN group for the Georgia LTPP section. ............................................................ 53
Figure 2.44: The CFUN group for the Georgia LTPP section. ............................................................ 53
Figure 2.45: The BFUN group (—) with the original shifted profile (o). ............................................ 54
Figure 2.46: The CFUNs+BFUNs (—) with the original shifted profile (o). ....................................... 55
Figure 2.47: The original shifted profile. ............................................................................................... 56
Figure 2.48: The NFUN group for ALPS2. ............................................................................................ 57
Figure 2.49: The CFUN group for ALPS2. ............................................................................................ 57
Figure 2.50: The BFUN group (—) with the original shifted profile (o). ............................................ 58
Figure 2.51: The BFUNs+CFUNs (—) with the original shifted profile (o). ....................................... 58
Figure 2.52: The original shifted ALPS2 profile. .................................................................................. 59
Figure 2.53: The NFUN group for ALPS2. ............................................................................................ 60
Figure 2.54: The CFUNs+BFUNs (—) with the shifted original noisy profile (o). ............................. 60
Figure 2.55: The original shifted IRI profile. ........................................................................................ 61
Figure 2.56: The NFUN group for the MnROAD IRI profile. ............................................................. 62
Figure 2.57: The CFUNs+BFUNs group (—) with the original shifted profile (o). ............................ 62
Figure 2.58: The original Arizona LTPP profile collected 1-25-2010. ................................................ 64
Figure 2.59: The CFUNs+BFUNs (—) with the original middle slab profile (o) from Arizona. ....... 64
Figure 2.60: The Arizona LTPP section collected 9-20-2008. .............................................................. 65
Figure 2.61: The raw middle three Arizona slab profiles from 2010 (—) and 2008 (o)..................... 65
Figure 2.62: The CFUNs+BFUNs for the middle slabs collected in 2010 (—) and 2008 (o). ............. 66
Figure 2.63: The single slab CFUNs+BFUNs (o) with the multiple slab ............................................. 67
Figure 2.64: The original LTPP profile from Wisconsin. ..................................................................... 68
Figure 2.65: The original middle slab profile (o) with the corresponding CFUNs+BFUNs (—) from
the multiple slab analysis. ......................................................................................................................... 69
Figure 2.66: The original profile (o) with the corresponding CFUNs+BFUNs (—) from the single
slab analysis. .............................................................................................................................................. 69
Figure 2.67: The CFUNs+BFUNs from multiple slab analysis (—) and from single slab analysis (o).
.................................................................................................................................................................... 70
Figure 2.68: The eleven slab LTPP profile from Utah. ........................................................................ 71
Figure 2.69: The original slab profile (o) with the CFUNs+BFUNs (—) from multiple slab analysis.
.................................................................................................................................................................... 72
Figure 2.70: The original slab profile (o) with the CFUNs+BFUNs (—) from single slab analysis. . 72

viii
Figure 2.71: The CFUNs+BFUNs from multiple slab analysis (—) and from single slab analysis (o).
.................................................................................................................................................................... 73
Figure 3.1 Comparison of typical quadratic polynomial curve fit with fitting data (o) and
ISLAB2005 (—) output data. ................................................................................................................... 75
Figure 3.2: Comparison of typical cubic spline surface (o) and ISLAB2005 (—) output data. ........ 76
Figure 3.3: Four profiles from a single slab as the distance from the edge varies. (‘+’ = 0” from the
edge; ‘*’ = 24” from the edge; ‘□’ = 48” from the edge; ‘◊’ = 72” from the edge) ............................ 78
Figure 3.4: Five error free ISLAB2005 slabs strung together. ............................................................ 80
Figure 3.5: The original noise induced profile shifted about the x-axis. ............................................. 81
Figure 3.6: The CFUNs+BFUNs (—) with original noisy profile (o) for middle three slabs. ............ 82
Figure 3.7: The CFUNs+BFUNs (—) with the original smooth profile (o) for slab 2. ....................... 82
Figure 3.8: The CFUNs+BFUNs (—) with the original smooth profile (o) for slab 3. ....................... 83
Figure 3.9: The CFUNs+BFUNs (—) along with the original smooth profile (o) for slab 4. ............. 83
Figure 3.10: The original middle slab profile (o) with the corresponding CFUNs+BFUNs (—) from
the multiple slab analysis. ......................................................................................................................... 87
Figure 3.11: An ISLAB2005 profile with -110.0° temperature gradient (—) and the
CFUNs+BFUNs from a middle Wisconsin slab (o). ............................................................................... 88
Figure A.1: The format required for the input data. ........................................................................... 100

1
CHAPTER 1: INTRODUCTION AND LITERATURE REVIEW
1.1 Introduction
Interest in characterizing the effects of surface pavement profiles on ride quality, safety, and other
components essential to an efficient and safe transit system has increased in recent years. A
profile is a two-dimensional string-like line of surface elevation data, collected longitudinally or
transversely at a constant distance from the edge of a pavement or slab (Sayers et al., 1998).
Individuals managing pavement systems have begun to use this data, within the assessment of
road conditions to make informed decisions regarding their maintenance, materials, construction,
bases, subgrades, etc. The development of the inertial profilometer has allowed for increased
amounts of profile data to be collected in relatively short periods of time. The challenge lies in
extracting useful profiles and information from the raw data sets (Adu-Gyamfi et al., 2010).
Concrete surface profiles can be used to show deflections and shapes of slabs due to temperature
and moisture gradients among other factors.
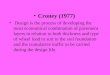
Figure 1.1 shows a roadway profile from Arizona containing eleven slabs that portray upward
curvature at the edges. This upward curvature can be somewhat attributed to temperature or
moisture gradients within the slabs. Curvature in slabs due to temperature is known as curling,
whereas curvature from moisture is referred to as warping.
Figure 1.1: An eleven slab surface profile from the Arizona LTPP section number 0215.
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
Profile Length (inches)
Deflection (
inches)

2
Concrete expands and contracts for many reasons. Temperature gradients through the slabs are a
common cause. Because one side of the slab is generally exposed to environmental elements (sun,
rain, wind, etc.) and the other side exposed to a more temperature stable subgrade, differences in
temperature from the bottom to the surface are found in most slabs. Heating a slab causes
expansion while cooling brings contraction. Past research has shown that concrete slabs curl
upward at the edges even in the absence of a significant internal temperature gradient. This
upward edge curvature under a zero temperature gradient is termed built-in curl. Temperature
gradients are measured by subtracting the surface temperature from the temperature at the base.
This means a negative temperature gradient will cause expansion at the bottom of the slab and
contraction at the top correlating to an upward curvature at the edges. Previous studies in this
area indicate magnitudes of -2.5°F/in. (0.055°C/mm) or greater are typical in highway pavements
(Lothschutz et al., 2011).
Moisture can cause similar curvature. Drying in the slab leads to contraction and increased
moisture brings on expansion. Significant humidity changes frequently occur at the surface of the
slabs, therefore the surfaces will undergo the greatest displacement fluctuations. Contraction at
the top of the slab will cause an upward curvature in pavement slabs. Differential shrinkage is
another factor contributing to warp. Field moisture measurements show surface shrinkage is
usually limited to the top 2 inches (50mm) of the slab. The remainder of the pavement typically
holds at 80% saturation or higher. Moisture content in pavement slabs is typically higher at the
bottom than at the top, causing upward warping (Eisenmann et al., 1990; Yu et al., 1998).
The magnitudes of deflection due to temperature and moisture gradients make it difficult to
extract and analyze them. For instance, a 12’x15’, 10” thick, single numerically modeled
concrete slab containing a 15°F (≈-9.44°C) temperature gradient, will show a predicted maximum
deflection, transversely from the middle of the slab to the edge, of approximately 0.0174 inches.
This small magnitude of deflection, coupled with the error involved in recording road profile data
in the field, makes it difficult to find trends within data that are not generated artificially. An
automated pavement profile analysis algorithm, based on the Hilbert-Huang Transform, is
developed in this thesis and will be applied to surface profile data to extract intrinsic mode
functions (IMFs) (Huang, 2005). By classifying the extracted IMFs into three groups, (1)
“noise/surface texture”, (2) “curl”, and (3) “base trends”, smoothed profiles can be analyzed and
compared after removing the noise/surface texture group.

3
1.2 Literature Review
To provide context in which to place the contributions of this thesis, background information will
now be provided beginning with why road surface profile analysis is important in the
transportation field, what factors affect road surface profiles and how these profiles are analyzed.
Greater detail will also be provided on moisture and temperature gradients, finite element
software, pavement modeling, built-in curl and the Hilbert-Huang Transform.
International Roughness Index (IRI)
As a result of increased interest in quality of road surfaces and driver satisfaction, there was
increased interest in characterizing the factors that contribute to increased roughness index
readings on roadways. The first step was to develop a way to measure and compare roughness
levels from different pavement surfaces. In 1982, Brazilian engineers began the International
Road Roughness Experiment (IRRE). Their goal was to find a universal method to measure and
record roughness profiles throughout the world. This goal resulted in the creation of the IRI
(Sayers, 1995). IRI (international roughness index) is a method of measuring and comparing slab
profiles for roughness. Developed in 1986, this method has since undergone significant changes.
Calculating IRI can be accomplished by dividing a longitudinal profile by its length resulting in a
quantity with units of slope, most commonly “in/mi” in the United States (Sayers, 1995).
Longitudinal profiles are two dimensional string-like lengthwise pieces of the road surface and
are assumed to show roughness felt by drivers, along with texture and grade (Sayers et al., 1998).
These profiles can be collected in a variety of ways. One of the simplest and cheapest ways is
with a hand-held dipstick. However, in most cases, these have been replaced by high-speed
profilometers. Profilometers are vehicles with lasers attached to them. As a vehicle passes over
the road surface, elevation data is collected by the laser and recorded for further analysis (Perera
et al., 1996). One type of surface profile data analyzed in this thesis is from an automated laser
profile system (ALPS2). Developed by the Minnesota Department of Transportation (MnDOT),
the ALPS2 consists of a laser that slides across a beam and collects elevation data for single slabs
(Cole et al., 2010). Because the widths of these profiles are small, it is possible to take many
profiles from the same surface. These profiles can vary greatly based on location on the slab. In
addition, there is currently no standard profile width. In the calculation of IRI, the slope between

4
the points is assumed to be linear (Sayers et al., 1998). Recently developed software has made
calculating IRI much easier. The Federal Highway Administration funded the development of the
ProVAL software package, which uses power spectral density analysis to statistically calculate
the IRI for a given profile. ProVAL analyzes profile elevation data to identify dominant
wavelengths and then converts the resulting statistics into IRI values (Wilde et al., 2006).
Stringline Effect
Many factors impact the IRI. In the case of rigid pavements (namely concrete), one major
contributing factor is the way in which a pavement is laid. The most common method of laying
new rigid pavements is with slipform pavers under the guidance of stringlines. The stringlines
that guide the pavers are placed prior to the paving process and follow a series of hubs, set by
engineers, that run parallel and adjacent to the path of the paver. Stakes, with wands constructed
to hold the stringlines, are positioned next to the hubs and then connected to the guiding
stringline. Each paver has wands with stringline sensors protruding from its sides and uses the
stringline as a guide for both the horizontal and vertical location of the bottom of the pavement.
Errors made while setting these stringlines is directly transferred into the pavements. Three
specific types of error involved with stringlines tend to have the most influence on IRI. These are
referred to as chord effect, sag effect and survey effect. The chord effect refers to the lack of
smoothness in a stringline at curves and changes in elevation. Stringline between different
elevations or horizontal curvature keeps a nearly constant slope between the stakes that hold it in
place. This tends to produce problems with smoothness near locations with either horizontal or
vertical curvature. When stringlines experience significant convex curvature between stakes, this
is known as the sag effect. Because of gravity, it is impossible to completely eliminate all sag
between stakes. Problematic sag is often caused by too much distance between stakes and/or the
stringline being held under insufficient tension. Of the three, survey effect is considered to have
the greatest influence on pavement IRI. Survey effect involves imperfections in the setting of
hubs, the calculating of locations and elevations, the construction of plan sheets, and all other
human error. Although these errors are unavoidable, they tend to be significant and great care
should be taken to keep them to a minimum (Rasmussen et al., 2004).

5
Moisture and Warping
Warping is another factor contributing to increased IRI levels. Changes in curvature and shape of
concrete slabs due to moisture is known as warping. Internal heat is generated by the hydration
process. This heat increases the rate of chemical reactions between water and the cement
materials. To evaluate the effects of these interactions, transient heat transfer readings are taken
between the concrete slabs and the surrounding environment. To accomplish this, heat of
hydration, solar heat, wind and temperature must all be taken into account. Convection heat
transfer occurs anytime the surface of concrete is at a different temperature than the surrounding
air. When the sun is shining, the pavement is always gaining heat energy through the absorption
of solar radiation. Transient mass transfer is generally used to estimate the vertical moisture
gradients through pavements. Finite element methods are used to obtain numerical solutions
predicting the moisture content through concrete pavements (Jeong et al., 2001).
Although the moisture content of concrete slabs has a large effect on the behavior of the slab as it
hardens, environmental effects most directly affect the concrete at its surfaces. Because of its
proximity to air, the top of freshly poured concrete slabs tends to dry at a faster rate than the
bottom. This causes a contraction near the surface of the pavement known as shrinkage (Jeong et
al., 2001). Field moisture measurements have shown that surface shrinkage is limited to the top 2
inches (50mm) of the slab. The remainder of the pavement typically holds at 80% saturation or
higher. Moisture content in slabs is typically higher at the bottom than at the top, causing upward
edge warping (Eisenmann et al., 1990; Yu et al., 1998). Altoubat et al. (2001) found that curing
compounds were not able to eliminate early age shrinkage stress in concrete pavements, but were
able to slow down the free shrinkage rate of freshly poured pavements. They also found that a
better alternative for retarding shrinkage early in the pavement’s life is to periodically wet the
pavements in the hours shortly after laying them. Concrete mix can play a role as well;
pavements mixed with high amounts of cement and low water/cement ratios are more susceptible
to autogenous shrinkage. On the other hand, high water/cement ratios usually lead to increased
porosity in the pavement and an overall increase of shrinkage (Mailyaganam et al., 2000). To
minimize the effects of shrinkage right after pavement is laid, most states set regulations on how
high the temperature of concrete can be during the paving process (Schindler et al., 2002).

6
Temperature and Curling
Another large contributor to increased roughness index readings in rigid pavements is the change
in slab shape and curvature attributed to temperature gradients contained within slabs. Concrete,
like most solids, expands and contracts with changes in temperature. Cold brings on contraction
while heat causes expansion. As there is a difference in temperature between the ground beneath
a concrete pavement and the air above, a non-zero temperature gradient exists within the slab.
Colder ground causes downward curvature at the edges as the slab contracts at the bottom and
expands near the surface. Warmer ground and cooler air causes upward edge curvature of the
slab with the bottom expanding and the top contracting. Because one side of the slab is generally
exposed to weather elements (sun, rain, wind, etc.) and the other side exposed to a more
temperature stable subgrade, differences in temperature from the top to bottom are found in most
slabs. Significant temperature variations frequently occur at the surface. Therefore, it is these
external surfaces which undergo the greatest displacement fluctuations.
Temperature gradients through slabs are measured by subtracting the bottom temperature from
the surface temperature. This means a negative temperature gradient would indicate that the
bottom of the slab is warmer than the surface. A concrete pavement temperature sample, taken in
Pennsylvania on I-80 in mid-July, showed a nighttime temperature gradient of -17°F and daytime
temperature gradient of 39°F. The surface temperature varied from approximately 62°F to 120°F,
a difference of 58°F, while the temperature at the bottom of the slab only varied from
approximately 76°F to 82°F (Beckemeyer et al., 2002). Concrete slabs tend to curl upward as the
slab cools. Studies in this area indicate magnitudes of -2.5°F/in. (0.055°C/mm) or greater are
commonly present in highway pavements (Eisenmann et al., 1990; Yu et al., 1998). Increasing
the temperature gradient increases the deflection and magnitude of curl experienced by slabs.
Although the temperature gradients through the slab are often significantly nonlinear, there was a
time when they were frequently assumed to be linear. The problem with this assumption is that
when the temperature gradients are treated as linear, the maximum tensile stresses in the
pavements are higher during the day and lower at night than the temperatures predicted from the
nonlinear distribution (Choubane et al., 1995).

7
Built-in Curl
Built-in curl of concrete pavement slabs is commonly found all over the world. This behavior is
partially attributed to differential shrinkage and temperature gradients during construction.
Differential shrinkage refers to the surface of the concrete drying at a faster rate than the bottom,
causing an upward contraction at the surface. Large temperature gradients through the slabs
during the hardening process can cause permanent built-in curl in the slabs. Consequently, these
slabs are not flat at a zero temperature gradient (Beckemeyer et al., 2002). When paving is
performed during the hot hours of the summer months, concrete is warm and still in a fluid form.
Fluid concrete lays flat due to gravity. This results in the slabs taking on a flat form with a
positive temperature gradient through them. If a slab hardens while containing this positive
temperature gradient, it will only return to a flat configuration when it experiences the same
temperature gradient as it had when laid. An actual zero temperature gradient will put the slab in
an upward curvature that would mimic a negative temperature gradient. This curvature at a zero
temperature gradient is termed built-in curl (Rao, 2005). The material properties of the cement
and admixtures in the pavement also affect the amount of built-in curl present. More information
on built-in curl can be found in Rao (2005).
Built-in curling is a key input parameter for the Mechanistic-Empirical Pavement Design Guide
(MEPDG). The curvature in slabs due to built-in curl has a major effect on pavement
performance. In a study by Asaban et al. (2011), field profile data from a two year period showed
that MEPDG slab curvature default values were close to those for real field data when looking at
restrained slabs, but not for unrestrained (or undoweled) slabs.
While no widely accepted procedure exists to model built-in curl, some studies have provided
useful research summaries. Armagani et al. (1987) showed that, on average, a positive
temperature gradient of approximately 9°F (5°C) is required to flatten out pavement slabs in
Florida. Vandenbossche (2003) used slab surface “dipstick” measurements to calculate slab
“curvature” and develop regression equations for curvature, corner displacements, and
curling/warping voids for doweled and undoweled slabs. Byrum (2000) used LTPP longitudinal
profile data to evaluate apparent “locked-in” curvatures. Rao et al. (2005) analyzed slab
deflection data and calculated an effective built-in temperature difference (EBITD) through a
slab, which represented the combined effects of nonlinear built-in temperature gradients,
irreversible shrinkage, and creep.

8
Modeling Concrete Pavement
As knowledge of the effects of temperature gradients within pavements increased, an accurate
model of concrete slab behavior due to these gradients became increasingly important. The first
proposed solution for concrete pavement evaluation using a model including analysis of corners,
edges and loading conditions, was postulated by Westergaard in the early 1920s (Westergaard,
1926). These calculations assumed an elastic foundation beneath the slab. Westergaard
continued his work and eventually analyzed slabs with both positive and negative temperature
gradients (Westergaard, 1927; Bradbury, 1938). The largest deficiency of Westergaard’s model
was that the layers (pavement and subgrade) never broke direct contact with one another. In
addition, his analysis tended to focus more on daytime conditions than nighttime ones (Jeong et
al., 2004). Tang et al. (1993) claims, with Beckemeyer et al. (2002) concurring, a large enough
temperature gradient can induce sufficient curling to actually lift portions of a slab and cause a
gap between the slab and the subgrade. Westergaard’s model does not allow for such separation
between the layers. No separation of layers, along with the assumption of a semi-infinite slab
length, caused Westergaard’s initial solutions to be a bit conservative and over the years finite
element analysis began to take over (Jeong et al., 2004).
Finite Element Models
To overcome the limitations of Westergaard’s model, Huang and Wang at the University of
Kentucky developed a computer analysis program to model curling in slabs (Huang et al., 1974).
This code was called KENSLABS and took into account not only slab size and multiple wheel
loads, but also allowed the user to analyze nighttime and daytime conditions separately.
KENSLABS incorporated many of Westergaard’s assumptions, including the idea of linear
temperature gradients. As time progressed, Korovesis introduced the idea of multiple layers and
produced a new finite element analysis program, ROOF (Korovesis, 1990). Like KENSLABS,
ROOF assumed a linear temperature gradient. Its advantage was the ability to incorporate
multiple layers, multiple slabs, and load transfer mechanisms into its calculations. The most
significant contribution made by ROOF was the ability to use multiple layers. Although each
layer was assumed to contain a linear temperature gradient, this allowed users the ability to
conduct piecewise analysis for nonlinear temperature distributions through multiple layers
(Ioannides et al., 1999).

9
Temperature gradients through slabs were initially assumed to be linear in slab finite element
analysis programs. Then, Thomlinson developed a more accurate solution based on the idea that
temperature gradients were of nonlinear nature (Thomlinson, 1940). Over time, evolution of
pavement slab finite element programs led to Khazanovich (1994) significantly improving ILLI-
SLAB FEM code to create ILSL2, in order to model nonlinear gradients. Due to its accuracy,
even when including multiple effects such as nonlinear temperature gradients, multiple layers,
load transfer and subgrade support, finite element analysis became the primary tool for analyzing
the effects of temperature gradients through pavements. Subsequently, ILSL2 was modified
from its original version to account for pavements with more than one separated layer and
multiple load transfer conditions. This new modified computer program became known as
ISLAB2000 (Roa et al., 2001). ISLAB2005 is a modification of ISLAB2000 code and will be
used in this thesis.
ISLAB2005
ISLAB2005 is an important piece of software that is used in this thesis to model concrete slab
behavior due to temperature gradients. ISLAB2005 is a finite element program used to predict
stresses due to loads or temperature gradients on or in rigid concrete pavements. The finite
element method involves calculating a numerical solution to the nonlinear temperature gradient
problem in pavements by discretizing the pavement slab into small rectangular elements, creating
a mesh. Deflections are measured at the corners of these elements, called nodes (Lothschutz et
al., 2011). Jeong et al. (2004) used this software to back-calculate shrinkage and creep effects
due to temperature on a specially constructed concrete test slab at Texas A&M University. This
program was also used in designing mechanistic-empirical pavement design guide (MEPDG), and
its accuracy has been verified by many researchers (Suh et al., 2008).
ISLAB2005 allows the user to vary a wide range of input variables, including geometry, areas,
layers, subgrade, joints, temperature, load and voids. Geometry involves not only the length and
width of the slab but also the mesh size with which the pavement is built. The user can choose
the step size for both the X and Y direction on the slab. Smaller step size corresponds to a finer
mesh, a smoother surface and more deflection locations in the output file. Examples of two mesh
types with opposite temperature gradients can be seen in Figure 1.2 and Figure 1.3.

10
Figure 1.2: A fine ISLAB2005 mesh on a 12x15 foot (≈ 3.7 by 4.6 meter) slab with a
negative temperature gradient.
Figure 1.3: A coarse ISLAB2005 mesh on a 12x15 foot (≈ 3.7 by 4.6 meter) slab with a
positive temperature gradient.
The input tab titled “Layers” contains the slab thickness variable and “Geometry” controls the
length and width. Slab size (meaning thickness and surface geometry) can play a pivotal role in
the effects of curling and warping. Studies have shown that overall curl can increase with

11
increased slab length. Some believe that the slab’s curl is proportional to the slab’s length
squared. However, these assumptions begin to break down when the slab length becomes large
enough that the weight of the slab itself minimizes the potential for curl. The width of the slab
tends to affect curling in a similar fashion. However, lengths tend to change with greater
frequency and magnitudes than widths. Therefore, more research has been performed with
varying slab lengths. Slab thickness and curling tend to be inversely proportional. The weight of
a thicker slab, in similar fashion to increased length, tends to retard the curling especially in the
upward direction (Lothschutz et al., 2011). A zero temperature gradient in ISLAB2005 results in
a flat slab. Deflections increase in magnitude as the temperature gradient increases in magnitude
in both the positive and negative directions.
The Hilbert-Huang Transform
Although ISLAB2005 can be used to accurately model artificial concrete surfaces, the challenge
is much greater when modeling and analyzing real-life pavement profiles. As mentioned
previously, curl deflections are small and field data is noise and error-ridden. In order to better
evaluate the effects of temperature gradients through real-life pavements and take the first step
toward modeling built-in curl, an automated profile analysis algorithm was developed based on
the empirical mode decomposition (EMD) process found within the Hilbert-Huang Transform
(HHT). Unlike most methods used in data analysis, the Hilbert-Huang Transform specializes in
analyzing data that is neither linear nor stationary. Newland (1984) defines stationary data as
data in which “the probability distributions obtained for the ensemble do not depend on absolute
time…the term “stationary” refers to the probability distributions and not to the samples
themselves! This implies that all averages are independent of absolute time and, specifically, that
the mean, mean square, variance, and standard deviation are independent of time all together.” In
the past, this type of data was monopolized by Fourier analysis methods. Wagner-Ville, wavelet
analysis, and Fourier spectrograms for small time periods, concern non-stationary processes but
assume linearity. On the other hand, time delayed imbedded analysis methods and some phase
plane representations allow for nonlinearity but assume stationary data (Huang and Shen, 2005).
The Hilbert-Huang Transform was developed to satisfy a need to make usable sense out of
distorted, nonlinear data containing variations and noise (Huang, 2005). Hilbert-Huang methods
are composed of multiple algorithms, one being the original empirical mode decomposition

12
(EMD) which is the basis of the profile analysis program developed for this thesis. Others
include the ensemble empirical mode decomposition (EEMD), the complex empirical mode
decomposition (CEMD) and Hilbert spectral analysis (Adu-Gyanfi et al., 2010). More
information on the HHT and the positive and negative aspects associated with its use can be
found in Huang and Shen (2005).
The different variants of the HHT have been used to evaluate many types of nonlinear data. Wu
et al. (2006) used the empirical mode decomposition method to analyze respiratory signals and
investigate the presence of cardiorespiratory synchronization in patients. Peng et al. (2003)
adopted the Hilbert-Huang Transform to study bearing faulting in machinery. They found, in
comparison with a wavelet-based scalogram, the HHT to have superior resolution, possess greater
power and also show increased efficiency in large computations. Schlurman (2001) used the
HHT to analyze spectral frequencies in both monochromatic and transient water waves. In this
study, Schlurman found “The subsequent Hilbert spectra to not only show no obvious constraints
compared to the wavelet transformation technique in defining a precise representation of
particular events in time-frequency space, but also provide a more physically meaningful
interpretation of the underlying dynamic processes.”
Hilbert-Huang mathematical analysis has been used previously to analyze pavement profiles.
Adu-Gyamfi et al. (2010) used the HHT to analyze 150 meter long road profiles. That work
discusses the Hilbert-Huang Transform, the ensemble empirical mode decomposition (EEMD),
the complex empirical mode decomposition (CEMD), and the Hilbert spectral analysis. Ayenah-
Prah et al. (2008) applied the HHT to evaluate cracks in selected pavements and found it to do
well in smoothing an image before applying the Sobel method for edge detection. Attoh-Okine et
al. (2006) elected to use the EMD process within the HHT to analyze a pair of flexible pavements
under separate varying conditions and to categorize pavements based on roughness. These
researchers stated:
“From the examples presented, it appears that HHT can be a powerful analysis
tool for non-stationary, nonlinear data, of which pavement profiles are examples.
In the case of rougher pavements, more IMFs are displayed and the HHT shows
that pavement profiles consist of various fundamental components. The results
provide both qualitative and quantitative identification of road surface profiles.
The example presented in this paper shows that such characterizations can be

13
used in ranking road surfaces for pavement management decision support
systems.”
In the work by Ayenu-Prah et al. (2009), the Hilbert-Huang Transform, the Fourier Transform
and the Wavelet Transform were all used to analyze three different 250 m long pavement surface
profiles. The results showed the HHT to do a good job indentifying characteristics of profiles.
The authors speculate that the extracted IMFs can be used to help describe vehicle vibrations and
ride quality in the future.
These previous investigations of pavement profiles using the HHT were limited to the analysis of
“lengthy” road surface profiles. This thesis focuses on shorter profiles, even using the HHT to
smooth a transverse surface profile from a single concrete slab. In addition, profiles from
ISLAB2005 single slab analysis; ISLAB2005 multiple slab analysis; ALPS2; MnROAD IRI; and
Wisconsin, Georgia, and Arizona LTPP will be examined to determine if the Hilbert-Huang
empirical mode decomposition method can be employed to successfully extract smaller scale
profile trends in the presence of noise, typical in field pavement profiles.
Thesis Organization
This thesis focuses on the initial steps toward modeling built-in temperature gradients within
concrete pavements. A Hilbert-Huang mathematical algorithm, used to “glean” usable data from
nonlinear, noise-filled data sets, is discussed in great detail in Chapter 2. Results obtained after
applying this algorithm to ISLAB2005, ALPS2, IRI and multiple LTPP surface profiles are also
presented in Chapter 2 as well. Chapter 3 discusses the modeling and temperature gradient back-
calculation techniques used to test the accuracy of the Hilbert-Huang method and verify
successful temperature gradient back-calculation capabilities of a surrogate slab surface model.
Finally, in Chapter 4, conclusions and discussion are given, drawn from the results in Chapters 2
and 3.

14
CHAPTER 2: ANALYZING PAVEMENT SURFACE PROFILES
USING THE HILBERT- HUANG TRANFORM
2.1 Overview
In order for a method modeling built-in curl in real-life concrete pavements to be universally
accepted, the method will have to utilize real surface profile data obtained in the field. The
difficulty with using the raw field profiles is the level of noise and frequency of inconsistencies
within these data sets. As deflections due to curling are small, and noise levels are large, accurate
modeling becomes very difficult. To remedy this problem, an automated pavement analysis
method was developed to smooth the real-field profiles and allow for more accurate and
consistent analysis of pavement sections or slabs. This method is based on the empirical mode
decomposition (EMD) process contained within the Hilbert-Huang Transform (HHT).
Extraction of noise in real-life and artificial profile data can be performed by applying a sifting
process to filter and identify the intrinsic mode functions (IMFs) that are contained in raw surface
profiles. The idea behind the Hilbert-Huang based sifting process is to identify these intrinsic
mode functions (IMFs) contained within the data, subsequently remove and categorize them, in
order to analyze specific portions of the original profile. Equation 1 (Huang, 2005) shows the
basic decomposition of any profile.
y(x) = cj(x) + rn(x) (1)
where y(x) is the original profile, cj(x) represents intrinsic mode functions (IMFs) within the data
set, and rn(x) is the residue after the first ‘n’ IMFs have been removed.
In the case of pavements profiles, some of the IMFs are due to “noise/ surface texture”, some are
due to “curling”, and the rest correspond to “base trends” if the pavement. By removing the
IMFs due to “noise/surface texture” from the distorted, non-linear profiles, one can effectively,
and mathematically, unveil the smoother functions of the original data set that can be attributed to
“curl” and/or “base trends”. Quotations are used around “noise/surface texture”, “curl” and “base
trends” to emphasize that these terms are used only to group functions of similar characteristics
contained in surface profiles. Surface profiles contain IMFs attributed to many different
variables. The goal of this thesis is not to explain what causes trends in pavement profiles but to
develop a method to analyze them.

15
After the automated profile analysis is performed, the resulting IMFs can be grouped to represent
different portions of the original data set. Based on frequencies and wavelengths of the extracted
functions, IMFs will be categorized into three separate groups. Frequencies of the intrinsic mode
functions decrease as the number of calculated IMFs increase. Therefore, the first IMF extracted
will have the highest frequencies and shortest wavelengths of any function within the profile.
The opposite will be the case for the final IMF.
The first group will be called “noise/surface texture” functions (NFUNs). These are high
frequency IMFs that are regarded as resulting partially from surface texture or noise contained
within the pavement profile. The wavelengths are short and the amplitudes small. The peaks of
the waves tend to appear sharp and pointed.
“Curl” functions (CFUNs) compose the second group. Compared to the NFUNs, these IMFs
will be characterized by lower frequencies, higher amplitudes and longer wavelengths. Before
CFUNs are extracted, much of the noise and surface texture will have already been removed from
the profile by the NFUNs. This will cause the CFUNs to appear smoother than the NFUN group.
The hypothesis used here is that these IMFs are partially caused by curling within the pavement
slabs.
The last group will be referred to as “base” functions (BFUNs). These will display the lowest
frequencies and the wavelengths will be longer than the CFUNs. The BFUNs are due to overall
base trends within the profile. In ISLAB2005, the curling magnitude is always calculated
assuming the original surface is horizontally flat. This is not the case for a real pavement section.
If the underlying base trends of pavement are not taken into account, there will likely be
deflections and curvatures that are incorrectly assumed to be caused by curling. The BFUNS are
the smooth, low frequency IMFs. The final residue is always grouped with the base trends.
Grouping IMFs allows for evaluation of the any portion of the profile, both individually and as a
group. For instance, the overall base trend of a profile can be obtained by summing all the
members of the BFUN group. In most cases, the portion of greatest interest is the removal of the
NFUN group to reveal the smoother characteristics of the slab profiles in absence of distortions
from noise and surface texture leaving just the combination of the CFUN and BFUN groups
representing a smoothed version of the profile.

16
2.2 Intrinsic Mode Functions
The first step toward identifying an IMF is to zero the targeted profile about the x-axis. Most
data sets obtained from the field are not in this format and need to be shifted. Simple linear
regression and the corresponding deviation from fit values are used for this shifting. A MATLAB
program has been created to perform the EMD process of the Hilbert-Huang Transform with
increased efficiency and accuracy; the linear regression shift is performed in the early stages of
that program. A single transverse slab profile, collected by the automated laser profile system
(ALPS2) (Cole et al., 2010), is used to illustrate this shift. The ALPS2 data used in this example
(Figure 2.1) was collected, on 8-23-2011, at 3:24 p.m., on cell 6, during run 4, at the MnROAD
testing facility. This facility, constructed in 1994, is located near Monticello, Minnesota and is
one of the largest in the world (Izevbekhai et al., 2012).
Figure 2.1: A raw profile sample from ALPS2, y(x)original.
0 20 40 60 80 100 120 140
5
5.2
5.4
5.6
5.8
6
6.2
6.4
6.6
Profile Length (inches)
Deflection (
inches)

17
Linear regression analysis is used to build a trendline for the original data set.
Figure 2.2: The raw ALPS2 profile y(x)original (—) with a corresponding linear regression
trendline y(x)fit (o).
Most points in the raw ALPS2 profile do not lie on the y(x)fit line in Figure 2.2 and therefore have
some magnitude of deviation from the fit.
y(x)original – y(x)fit = y(x)shift (2)
A shifted version of the profile can be obtained after subtracting the line of best fit from the
original profile as given by equation 2. This shifted profile is shown in Figure 2.3. This method
is generic and can be used for multiple types of data and profile sizes.
0 20 40 60 80 100 120 1404.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
6.4
6.6
Profile Length (inches)
Deflection (
inches)

18
Figure 2.3: The ALPS2 profile shifted about the x-axis.
As mentioned previously, a MATLAB program was created to perform the empirical mode
decomposition automatically. A plot of the input profile in shifted form is an automatic output of
the program. The program output vector y_shift corresponds to the y(x)shift in equation 2 and the
yfit output vector is the y(x)fit also given in equation 2. The raw input profile is prescribed in a
text file labeled func1.txt. This file needs to be provided in the format as shown in Figure 2.4.
There must be two columns of data that are labeled ‘x’ and ‘y’, and the vectors must be of the
same length. Detailed directions to execute the MATLAB program are provided in Appendix A.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)

19
Figure 2.4: The required formatting HHT MATLAB program input file func1.txt.
Once the profile has been zeroed about the x-axis, the next step is to identify the critical points of
the shifted profile in order to build upper and lower spline envelopes for the data set. The
remaining steps of this Intrinsic Mode Functions section (not including IMF Grouping) is as
outlined by Wu et al. (2006). Including the endpoints, one determines and compiles the x,y data
for each critical of the shifted profile, keeping the maxima and minima separate. The endpoints
are always assumed to be critical. If the magnitude of the endpoint is greater than the point next
to it, the endpoint is classified as a maxima. Conversely, if it is less in magnitude than the
neighboring point value, it is classified as a minima. This step is completed automatically for
each sifting iteration within the MATLAB program. An example of this classification of critical
points, for the shifted ALPS2 profile, can be seen in Figure 2.5 and Table 1.
x y
0 0.005148
6 0.002631
12 0.00929
18 0.019267
24 0.026703
30 0.027353
36 0.023418
42 0.018713
48 0.016116
54 0.014766
60 0.013215
66 0.011419

20
Figure 2.5: Critical points for the sample ALPS2 profile ( * = maxima, o = minima).
Table 1: The classification and values of the critical points identified in Figure 2.5.
These critical points are the required inputs to build an upper envelope for the data set, U(x) and a
lower envelope, L(x). Using the spline function, an interpolation was performed by MATLAB to
build the upper and lower envelopes. These piecewise cubic polynomials were then evaluated at
all x-values using the ppval function in MATLAB’s spline toolbox.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)
x-max y-max x-min y-min
12 0.0227 6 -0.01075
21 0.00929 18 -0.00531
27 0.026703 24 0.007426
36 0.018713 30 0.00827
42 0.014766 39 0.014029
60 0.007935 48 -0.01824
75 0.003708 72 -0.00474
81 -0.01492 78 -0.02056
93 -0.02489 87 -0.04991
105 -0.00351 99 -0.05498
114 0.027564 108 -0.01932
120 0.007067 117 -0.00409
129 0.062197 123 -0.00606
135 0.04325 132 0.027723
138 0.026697

21
Figure 2.6: The first computed upper envelope (U1(x)) (o) and lower envelope (L1(x)) (+),
around the original shifted profile (—).
Figure 2.6 displays three different vectors of deflection data corresponding to the same x-values.
The profile that appears to be sandwiched between the other two is the original shifted ALPS2
profile. The ‘o’s represent the upper envelope, U(x), built by MATLAB’s spline function from
the maxima data on the left side of Table 1. The ‘+’s represent the lower envelope, L(x), built
using the same MATLAB tools but from the minima data shown on the right side of Table 1.
The difference in magnitudes from the upper and lower envelopes at each x-data point can be
used to calculate a running mean denoted m(x) for the profile given by equation 3.
m1(x) = (U1(x)+L1(x))/2 (3)
Once this running mean has been calculated for all x-values, subtracting m1(x) from the original
shifted profile (y(x)shift) yields the first component, and potential IMF, h1(x) (as given in equation
4).
h1(x) = y(x)shift – m1(x) (4)
0 20 40 60 80 100 120 140-0.1
-0.05
0
0.05
0.1
0.15
Profile Length (inches)
Deflection (
inches)

22
For this resulting component h1(x) to be classified as the first IMF, there are two criterion that
need to be met. The first is that h1(x) must display symmetry of the upper and lower envelopes
with respect to zero. Therefore, the calculated running mean must be nearly zero across all x-
values. Also, the number of critical points and zero crossings must be the same or differ by one
(Huang, 2005). Although Figure 2.7 shows the correct number of extreme points and zero
crossings, the symmetry of the upper and lower envelopes has not been met as shown in Figure
2.6. Consequently, the sifting process needs to continue.
Figure 2.7: The first component, h1(x).
With further sifting required, h1(x) is now treated as the profile of interest and the envelope
building and sifting processes are repeated.
h11(x) = h1(x) – m11(x) (5)
h11(x) is then evaluated by the IMF criterion listed previously. The process is repeated using
h1k(x) = h1(k-1)(x) – m1k(x) (6)
0 20 40 60 80 100 120 140-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
Profile Length (inches)
Deflection (
inches)

23
until a component is reached that meets the IMF requirements.
For this profile, the first IMF was h149(x). For clarity, set c1(x) = h1k(x) (Huang, 2005). In this
example single slab profile, c1(x) = h149(x). c1(x) has twenty-seven zero crossings, twenty eight
critical points and displays symmetry of the upper and lower envelopes with respect to zero.
Figure 2.8: The first IMF (c1(x)) for the ALPS2 profile.
As with most first IMFs of surface profile data, the one corresponding to the ALPS2 data,
displayed in Figure 2.8, is attributed to “noise/surface texture”. Instead of attempting to
incorporate all the IMF requirements in the automated HHT MATLAB program, the constraints
were set using only symmetry of the upper and lower envelopes with respect to zero. Multiple
runs have verified that setting a low enough running mean tolerance within the MATLAB code
assures sufficient sifting steps will take place in order that the extreme points/number of zero
crossing requirements are met for each IMF as well. A sum of least squares tolerance for the
running mean was set at 0.0003 in the MATLAB code for this profile. More details on this can
be found in Appendix A.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)

24
2.3 Residues
The first residue, r1(x), is calculated once the sifting process has identified the first IMF, c1(x).
The first residue is the difference between the original shifted profile (y(x)shift) and the first IMF
(c1(x)).
r1(x) = y(x)shift – c1(x) (7)
r1(x) will possess characteristics of the original profile but should be smoother due to removal of
“noise/surface texture” contained within the first NFUN, c1(x).
Figure 2.9: The first residue, r1(x), for the ALPS2 profile.
The residue shown in Figure 2.9 is not sufficiently smooth for “curl” analysis. The first NFUN
did not remove all “noise” or “surface texture” from the original data set. Therefore, more sifting
must be performed to extract a smoother profile using equation 8 and equation 9. The first
residue now replaces the original profile and the entire process is repeated, treating r1(x) as if it
were the original shifted profile y(x)shift. The equations used are the same format but labeled for
universal use.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Profile Length (inches)
Deflection (
inches)

25
Running Means: mik(x) = (Uik(x)+Lik(x))/2 (8)
IMFs: hik(x) = hi-1(k)(x) – mik(x) (9)
Residues: ri(x) = ri-1(x) – ci(x) (10)
The number of residues and IMFs within profiles vary based on length, magnitude, and noise
levels, among other factors. The sifting process continues to extract IMFs until a residue is
uncovered that has three or less critical points, as shown for the ALPS2 profile in Figure 2.10.
For the criteria implemented in the MATLAB code, this happens when there is only one maxima,
or one minima, causing one of the envelope splines to result in a horizontal line. At this point, the
sifting process is terminated. The residue with three or less critical points is referred to as the
final residue, (ri(x) in equation 10) and is the only residue that is included in the grouping process
and is placed in the BFUN group. The fourth residue, r4(x), was the final residue for this sample
profile.
Figure 2.10: The fourth and final residue for the sample ALPS2 profile.
0 20 40 60 80 100 120 140-8
-6
-4
-2
0
2
4
6
8
10x 10
-3
Profile Length (inches)
Deflection (
inches)

26
Combining all the IMFs with the final residue can be used as a check to ensure the sifting
calculations were performed correctly.
Figure 2.11: The sum of all IMFs and final residue (+) with the original sample ALPS2
profile (o).
If the sifting was performed correctly, the sum of all IMFs and the final residue must add up to
the original profile as shown in Figure 2.11.
A basic overview of what has just been discussed is performed automatically by the automated
MATLAB program and the process is shown in the flow chart given in Figure 2.12.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)

27
Figure 2.12: A basic flow-chart for the automated MATLAB EMD sifting process.

28
After the IMFs are extracted and residues uncovered, they are stored in results.mat; which is a
data file in MATLAB that contains multiple matrices. These can then be extracted for further
analysis (Appendix A).

29
2.4 IMF Grouping
Road and slab profiles are composed of “noise/surface texture”, “curl” and “base trend” data. In
order to evaluate specific portions of pavement profiles, the IMFs are grouped based on what they
represent. Grouping IMFs can be difficult because there is no clear or concise method by which
to do it and profiles contain varying numbers of IMFs. The majority of the IMFs extracted in
single slabs scenarios tend to be composed of “noise/surface texture”. In the multiple slab case, a
greater number can be categorized in the “curl” and “base trend” groups. Steps for the
classification of the IMFs and their grouping into NFUNs, CFUNs or BFUNs, previously defined,
will be outlined in this section. This will be accomplished by demonstrating the grouping
procedure on a pavement section from Wisconsin.
Wisconsin LTPP
The Federal Highway Administration’s (FHWA) Long Term Pavement Performance (LTPP)
group collected the profile displayed in Figure 2.13 on 2-Aug-1991, from a Wisconsin roadway in
close proximity to the Wisconsin section that Chris Byrum performed his extensive research on.
Chris Byrum, Ph.D./P.E., Soils and Materials Engineers, Inc. analyzed IRI profile data for a
section of concrete highway in Wisconsin. The section of roadway he used has received large
levels of attention from the LTPP group due to the unusually high levels of “curl” found in these
controlled slabs. In fact, the profile data from these slabs was used to manufacture a method to
estimate warp and curl called the Byrum Curvature Index, or BCI (Byrum, 2009).
This profile data was collected from section 55-3009, at 12:07 p.m., during run 3, from the left
elevation. The five slab profile was chosen because the slab profiles appear to show congruency
with one another, are easily identified by their surface data, and provide a good example of
classifying IMFs.

30
Figure 2.13: The five-slab Wisconsin LTPP profile shifted about the x-axis.
Figure 2.14: The first NFUN for the five slab Wisconsin LTPP profile.
The first IMF, and member of the NFUN group, is composed of “noise/surface texture” from the
original profile. The spiking displayed near the edges in Figure 2.14 commonly occurs during the
sifting process. This spiking often causes inconsistent distortions near the edges of the profile as
IMFs are extracted. Therefore, the edges of the profile are generally ignored during IMF
classification and discarded before analysis. In addition, only the middle slab will be analyzed at
0 100 200 300 400 500 600 700 800 900 1000-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Profile Length (inches)
Deflection (
inches)
0 100 200 300 400 500 600 700 800 900 1000-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
Profile Length (inches)
Deflection (
inches)

31
the end of the sifting process. Figure 2.14 shows a function with the characteristic high
frequencies and short wavelengths of members of the NFUNs. By examining the first residue
shown in Figure 2.15, one can confirm whether this IMF was classified properly.
Figure 2.15: The first residue (—) with the shifted Wisconsin profile (o).
The removal of “noise/surface texture” did not have a very significant change on the overall
profile shape or trend. However, it is clear that the first IMF is indeed a function of the NFUN
group. There is some noticeable smoothing near the bottom of the slabs, meaning the empirical
mode decomposition sifting is performing as expected. The amount of data, still present within
the first residue, which shows characteristics of “noise/surface texture” will determine whether
the second IMF is grouped as an NFUN or a CFUN.
0 100 200 300 400 500 600 700 800 900 1000-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Profile Length (inches)
Deflection (
inches)

32
Figure 2.16: The second IMF and second member of the NFUN group.
The mixture of “noise/surface texture” and curl data is evident from Figure 2.16. There is still a
significant amount of “noise/surface texture” in the middle of the profile. The noise is obvious
because of its small amplitude and high frequency waves. However, there is a different type of
data being extracted by this sift located near x=215 inches and x=750 inches. This data is
smooth, has higher amplitudes and longer wavelengths than the NFUNs, and is characteristic of
“curling” rather than “texturing” of the section. The edges, especially the left one, have blown up
from the spiking due to edge effects. As mentioned previously, the middle slab is the only slab of
interest for this example. In the middle of Figure 2.16 there is still only “noise/surface texture”
being removed. Therefore, the second IMF will be classified as another NFUN.
0 100 200 300 400 500 600 700 800 900 1000-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Profile Length (inches)
Deflection (
inches)

33
Figure 2.17: The second residue (—) with the original shifted profile (o).
The “noise/surface texture” portions of the original profile have been significantly removed by
the second IMF as seen by the smoothness of the second residue shown in Figure 2.17. As
mentioned earlier, spiking at the edges has caused larger amounts of data removal there. Notice
how the “curl” that was observed around x=215 inches and x=750 inches in Figure 2.16 is now
absent at those same locations in Figure 2.17. If the middle three slabs were being used for
analysis instead of only the very middle one, the second IMF would have been a member of the
CFUN group. If necessary, it is always better to leave some “noise/surface texture” in the profile
than to classify and remove data potentially arising from “curl” as “noise/surface texture”.
0 100 200 300 400 500 600 700 800 900 1000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Profile Length (inches)
Deflection (
inches)

34
Figure 2.18: The third IMF and first and only member of the CFUN group.
Figure 2.18 shows the portion of the original profile resulting from “curl” and classified as a
member of the CFUNs. It is clear that this IMF has lower frequency and smoother waves with
larger amplitudes than what was typical of the NFUNs. Notice that the “curl” data mimics the
original profiles but is zeroed on the x-axis. This is because the “curl” data is free of nearly any
“base trends”. Also, notice that “curl” is driven by joint spacing. The lengths of the slabs
correspond to the resulting “curl” wavelength. The third IMF appears to contain most of the
“curl” data from the original profile; consequently, after its removal, the original profile should be
reduced to its “base trends”. The edges of the CFUNs shown in Figure 2.18 have been distorted
from edge effects during the sifting process.
0 100 200 300 400 500 600 700 800 900 1000-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Profile Length (inches)
Deflection (
inches)
Approximately 13 foot (156
inch) slabs from joint to joint

35
Figure 2.19: The third residue (—) with original shifted profile (o).
As previously mentioned, the third IMF (shown in Figure 2.18) removed the “curl” data from the
second residue (shown in Figure 2.17). The third residue shown in Figure 2.19 displays the
underlying trend of the data set for the middle slab. Therefore, the next IMF will be composed of
“base trend” oscillations (BFUNs).
Figure 2.20: The fourth IMF and first member of the BFUN group.
0 100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Profile Length (inches)
Deflection (
inches)
0 100 200 300 400 500 600 700 800 900 1000-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Profile Length (inches)
Deflection (
inches)

36
The fourth IMF, as shown in Figure 2.20, constitutes nearly all of the “base trends” within the
original profile. The distortions near the edges are due to previous spiking that took place during
the sifting process. Because this plot holds the same general contour as the third residue (shown
in Figure 2.19), one can expect the removal of this BFUN to uncover a final residue trend that is
linear. It is clear that the middle portion of fourth IMF displays longer wavelengths and lower
frequencies than both the NFUNs and CFUNs. Therefore, this fourth IMF, along with any
remaining IMFs, will be classified as BFUNs.
Figure 2.21: The final residue (BFUN) (—) with the original shifted profile (o).
The underlying trend of the Wisconsin five slab profile is of the linear nature as shown in Figure
2.21. The final residue is the most basic trend that can be uncovered under the sifting constraints
of the HHT based profile analysis algorithm. The wavelength is longer and the less frequent than
any IMF extracted from this profile. The final residue is always included in the grouping process
and these criteria are the basis for why this is classified a BFUN.
With the sifting and classification process completed, physical grouping of the IMFs can now be
performed. The original profile, along with IMFs and the final residue for the middle slab, will
be extracted to show in greater detail how the original profile data is grouped. The NFUNs will
be shown first, the CFUNs second, the BFUNs third, and finally the combination of
0 100 200 300 400 500 600 700 800 900 1000-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Profile Length (inches)
Deflection (
inches)

37
CFUNs+BFUNs with the original profile will be shown. This final combination of the
CFUNs+BFUNs constitute a smoother version of the original slab profile.
Figure 2.22: The original middle slab profile extracted from the shifted five-slab profile.
Figure 2.23: The NFUN group for the middle slab of the Wisconsin profile.
The two IMFs comprising the NFUN group for this profile are shown in Figure 2.22. The spiking
during sifting took place only at the edges of the five slab profile and therefore does not distort
420 440 460 480 500 520 540 560 580 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Profile Length (inches)
Deflection (
inches)
420 440 460 480 500 520 540 560 580 600-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Profile Length (inches)
Deflection (
inches)

38
the edges of the middle slab profile as shown in Figure 2.23. The high frequency and low
amplitude wavelengths, along with lack of smoothness, are consistent with trends associated with
“noise/surface texture” and thus confirm these IMFs do indeed belong in the NFUN group.
Figure 2.24: The CFUN group.
A closer examination of the CFUN group displayed in Figure 2.24 shows that the first two IMFs
(NFUNs) were able to remove the majority of “noise/surface texture” from the original profile,
but a small amount appears to be left behind. One should note how the Figure 2.24 profile,
absent of “base trends”, is centered on the x-axis whereas the profile shown in Figure 2.22 is not.
The CFUN group was composed solely of the third IMF.
420 440 460 480 500 520 540 560 580 600-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Profile Length (inches)
Deflection (
inches)

39
Figure 2.25: The BFUN group (—) with the original noisy profile (o).
Figure 2.25 shows the “base trend” for the middle slab of the original five slab profile. As with
the “curl” and “noise/surface texture” there are no distortions from edge spiking. It is clear that
the BFUN group is free of “noise/surface texture” and “curl”. Also, one can notice how the
BFUN group is not centered on the x-axis. The addition of the BFUN group to the CFUN group
shifts and tilts the CFUN group to return it to its original position.
Figure 2.26: The CFUNs+BFUNs (—) with the original shifted profile (o).
420 440 460 480 500 520 540 560 580 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Profile Length (inches)
Deflection (
inches)
420 440 460 480 500 520 540 560 580 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Profile Length (inches)
Deflection (
inches)

40
Finally, as shown in Figure 2.26, it is clear that the BFUNs and CFUNs compose the majority of
a profile data set. This is not a perfect match but remember the scale is small. The
CFUNs+BFUNs had a significant portion of the “noise/ surface texture” removed, resulting in a
smoother profile. NFUNs distort original profiles, therefore suggesting that the combination of
the CFUNs+BFUNs, as shown in Figure 2.26, is a more accurate representation of the profile the
LTPP data was collected to explore.

41
2.5 Results
With the algorithm for applying the Hilbert-Huang based analysis to pavement profiles outlined,
results from its application to profiles from several different sources will be provided. These
sources include both artificially generated profiles using ISLAB2005, as well as actual field
profiles. The field profiles include data from ALPS2; MnROAD IRI; Wisconsin, Georgia, Utah,
and Arizona LTPP sections.
ISLAB2005 Single Slab
A single, 12’x15’ slab, 10” thick, with a -15°F temperature gradient was analyzed using
ISLAB2005. All other ISLAB2005 input parameters were set at their default values. Figure
2.27 shows a transverse profile taken from the middle of the slab. The smooth original profile
had random uniform noise added to it in order to verify the developed HHT profile analysis
algorithm and more accurately represent a field slab profile. This error was introduced by adding
a uniform random fluctuation of ±15% of the magnitude of deflection for each data point. This
explains the increased error near the slab edges, where the magnitudes of the deflection are the
largest. The developed Hilbert-Huang based profile analysis algorithm was applied to the noise-
induced profile shown below in Figure 2.27.

42
Figure 2.27: The original noisy profile with induced error (—) and the original smooth
profile from ISLAB2005 (o).
Figure 2.28: The NFUN group for the single ISLAB2005 slab.
Only one IMF was extracted from the noise induced ISLAB2005 single slab profile. By
examining the frequency and wavelength of the data displayed in Figure 2.28, one can confirm
that this IMF belongs in the NFUN group for the single ISLAB2005 slab profile.
0 50 100 150-2
0
2
4
6
8
10
12
14x 10
-3
Profile Length (inches)
Deflection (
inches)
0 50 100 150-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
Profile Length (inches)
Deflection (
inches)

43
Figure 2.29: The BFUN+CFUN group (—) with the original noisy profile (o).
Compared to real field data, there is significantly less noise present in the profile displayed in
Figure 2.27. Therefore, only one IMF was extracted from the noise induced ISLAB2005 single
slab slab profile. In this case, the final residue is composed of “curl” and “base trend” data
contained within the original slab profile. The combination of the CFUNs+BFUNs is expected to
be similar to the ISLAB2005 slab before error induction. Figure 2.29 shows this to be the case.
ISLAB2005 Multiple Slabs
ISLAB2005 was also used to generate a five slab profile with uniform randomly induced error
fluctuations of ±15% of the magnitude of each profile deflection value. Originally when the slabs
were strung together, the bottoms of two slabs were close to y=0 as shown in Figure 2.30. This
resulted in very little noise induced near the bottoms of two those slabs. To remedy this, 0.0075
was added to the deflection magnitudes for all slabs at each x-data point before the random
percentage of error was introduced. Therefore, there is significantly larger error than ±15% of the
original magnitudes. This added bias also served to test the HHT based automated profile
analysis process under higher levels of noise.
The longitudinal profile chosen for analysis is similar to where a wheel path might be, 30 inches
from the longitudinal edge of the ISLAB2005 generated artificial pavement. In addition, all the
0 50 100 150-2
0
2
4
6
8
10
12
14x 10
-3
Profile Length (inches)
Deflection (
inches)

44
slabs have a 10” thickness. From left to right, the first slab is 12’x18’ with a positive temperature
gradient of 12°F; the second is 12’x15’ with a positive temperature gradient of 19°F; the middle
slab is 12’x12’ with a positive temperature gradient of 8°F; the fourth one, from left to right, is
another 12’x18’ slab but contains a 22°F positive temperature gradient; and finally, the farthest
right slab is 12’x15’ with a positive temperature gradient of 5°F. If all the slabs were the same
size and dimensions, the base profile trend would be horizontal with a non-zero slope. By
varying the size of the slabs and temperature gradients through them, a non-zero base trend will
be induced in the five slab profile.
Figure 2.30: The five slab ISLAB2005 profile before shifting and error induction.
The combined profile of the five individually generated ISLAB2005 slabs were strung together as
shown in Figure 2.30. No error has been introduced yet, nor has the profile been centered about
the x-axis. Again, notice the joint spacing drives the “curl” wavelengths of the slabs.
0 100 200 300 400 500 600 700 800 900 1000-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
Profile Length (inches)
Deflection (
inches)
12 feet (144 inches)
from joint to joint
for middle slab 3

45
Figure 2.31: The shifted noise induced profile.
Figure 2.31 shows the profile after the introduction of aforementioned noise and the centering of
the profile about the x-axis. With the increased levels of noise, the profiles displayed in Figure
2.31 share more similarities with LTPP real field profiles.
Figure 2.32: The NFUN group for the multiple ISLAB2005 slabs.
0 100 200 300 400 500 600 700 800 900 1000-0.01
-0.005
0
0.005
0.01
0.015
0.02
Profile Length (inches)
Deflection (
inches)
0 100 200 300 400 500 600 700 800 900 1000-6
-4
-2
0
2
4
6x 10
-3
Profile Length (inches)
Deflection (
inches)

46
Consistent with “noise/surface texture” characteristics, the frequencies of the NFUN group shown
in Figure 2.32 are high and the wavelengths are short. Removal of this NFUN group will smooth
the original noisy profile and uncover more prominent “curl” and “base trends”.
Figure 2.33: The CFUN group for multiple ISLAB2005 slab configuration.
Although not purely composed of “curl” data, Figure 2.33 shows nearly all the “curl” from the
five slab profile. The bottoms of the slabs are not perfectly smooth; therefore some of the
artificial error is still mixed in with the CFUNs. Also, the profile is not zeroed on the x-axis,
signifying that “base trend” data is present in the CFUN group displayed in Figure 2.33 as well.
0 100 200 300 400 500 600 700 800 900 1000-0.015
-0.01
-0.005
0
0.005
0.01
0.015
Profile Length (inches)
Deflection (
inches)

47
Figure 2.34: The BFUN group (—) with the shifted noisy profile (o).
Similar to the Wisconsin profile previously analyzed in the IMF Grouping section, spiking during
sifting process makes results more accurate away from the edges. Therefore, the BFUN group
shown in Figure 2.34 is most accurate near the middle of the profile.
Figure 2.35: The CFUN+BFUN group (—) with the shifted noisy profile (o).
0 100 200 300 400 500 600 700 800 900 1000-0.01
-0.005
0
0.005
0.01
0.015
0.02
Profile Length (inches)
Deflection (
inches)
0 100 200 300 400 500 600 700 800 900 1000-0.01
-0.005
0
0.005
0.01
0.015
0.02
Profile Length (inches)
Deflection (
inches)

48
Figure 2.35 compares the combination of the CFUN+BFUN groups with the original noisy
profile. The CFUN+BFUN data for the middle slabs is consistent with the noisy profile trends
but is smoother due to NFUN separation and removal.
With the Hilbert-Huang automated profile analysis program verified on artificial profiles
generated using ISLAB2005, attention was now turned to its application to real field profiles.
Arizona LTPP
An LTPP section from Arizona, 1980 inches long, was analyzed using the Hilbert-Huang based
profile analysis algorithm. Contained within the original profile is surface data for eleven fifteen
foot long slabs. The profile was collected on 25-January-2010, from section 04-0215, at 5:37
p.m., during run 1, and from the left wheel path.
Figure 2.36: The original shifted Arizona LTPP profile.
Considerable edge effects from spiking during the sifting process are expected due to the
deflection variation shown in Figure 2.36. Therefore, a three-slab section from the middle of the
original profile shown in Figure 2.36 will be extracted before grouping is performed.
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
Profile Length (inches)
Deflection (
inches)

49
Figure 2.37: The three middle slabs from the original Arizona LTPP profile.
The automated Hilbert-Huang based algorithm was applied to the entire profile and the results for
the middle three slabs were extracted for analysis. These slabs were taken from x=732 to
x=1256, and the raw slab profiles are displayed in Figure 2.37.
Figure 2.38: The NFUN group for the Arizona profile.
700 800 900 1000 1100 1200 1300-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
Profile Length (inches)
Deflection (
inches)
700 800 900 1000 1100 1200 1300-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
Profile Length (inches)
Deflection (
inches)

50
One can notice there is no spiking near the edges of the NFUN group shown in Figure 2.38.
Spiking and distortion did take place near the edges of the eleven slab profile as usual, but the
profile was long enough that the middle slabs were unaffected. This NFUN group is composed of
the first two IMFs.
Figure 2.39: The CFUN group for the Arizona profile.
The “curl” is clearly defined for the three middle slabs from Arizona LTPP profile. The profile
displayed in Figure 2.39 is smooth; meaning “noise/surface texture” has been removed. It is also
nearly centered on the x-axis, meaning very little “base trend” data is present. The CFUN group
is composed of IMFs 3-5.
700 800 900 1000 1100 1200 1300-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Profile Length (inches)
Deflection (
inches)

51
Figure 2.40: The BFUN group (—) with the original profile (o) for Arizona.
The BFUN group shown in Figure 2.40 is composed of the sixth IMF and the final residue. For
this Arizona LTPP three slab section, the separation of the NFUNs, CFUNs and BFUNs was very
effective and the three groups clearly defined.
Figure 2.41: The CFUNs+BFUNs (—) with the original profile (o).
700 800 900 1000 1100 1200 1300-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Profile Length (inches)
Deflection (
inches)
700 800 900 1000 1100 1200 1300-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Profile Length (inches)
Deflection (
inches)

52
The CFUNs+BFUNs do an excellent job of showing the base trends and curling within the profile
as shown in Figure 2.41, and this combination is absent of distortions due to “noise/surface
texture”.
Georgia LTPP
Figure 2.42: The original shifted Georgia LTPP profile.
A Georgia LTPP section is the longest profile analyzed, using the Hilbert-Huang based profile
analysis algorithm, in this thesis. This 6000 inch long section contains “noise/surface texture”,
“curl”, and “base trend” data for many slabs. Due to the large profile length, and unlike the
single slabs, there is only one IMF which qualifies as a member of the NFUN group. The other
seven computed IMFs contribute to the “curl” and “base trends” of the section. This LTPP
section profile was collected on 3-August-1990, from section 13-3019, at 9:38 a.m., during the
first run in the left wheel path.
0 1000 2000 3000 4000 5000 6000-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Profile Length (inches)
Deflection (
inches)

53
Figure 2.43: The NFUN group for the Georgia LTPP section.
Figure 2.43 shows what appear to be large quantities of “noise/surface texture” from the original
Georgia profile. However, the deflection magnitudes in Figure 2.43 are not large when compared
to those of the entire profile as shown in Figure 2.42. Consequently, the removal of this IMF will
smooth the original profile but the effects will not be readily apparent.
Figure 2.44: The CFUN group for the Georgia LTPP section.
0 1000 2000 3000 4000 5000 6000-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
Profile Length (inches)
Deflection (
inches)
0 1000 2000 3000 4000 5000 6000-2
-1.5
-1
-0.5
0
0.5
Profile Length (inches)
Deflection (
inches)

54
Major spiking took place during the sifting process on the right edge of the Georgia profile. This
increases the deflection scale shown in Figure 2.44 and makes empirically analyzing the CFUNs
more difficult.
Figure 2.45: The BFUN group (—) with the original shifted profile (o).
Ignoring the edge slabs, the “base trends” follow the contour of the original profile as shown in
Figure 2.45. Scaling in Figure 2.45 makes it difficult to see, but the BFUN group is smooth. The
“base trends” have been successfully extracted for this Georgia LTPP pavement surface profile.
0 1000 2000 3000 4000 5000 6000-1
-0.5
0
0.5
1
1.5
2
Profile Length (inches)
Deflection (
inches)

55
Figure 2.46: The CFUNs+BFUNs (—) with the original shifted profile (o).
For this Georgia profile, only one IMF portrayed “noise/surface texture” characteristics.
Removal of the highest frequency IMF from this 6000 inch field profile does not cause significant
changes. Figure 2.46 supports this.
ALPS2: Cell 6, Panel 1, Run 4
The ALPS2 data was collected by MnDOT, at the MnROAD facility, on 23-August-2011, at 3:24
p.m., on cell 6, during run 4. The data is from cell 6, which contains 12’x15’ concrete panels.
The profiles chosen are transverse and from the middle of the slabs. This is the same profile
used earlier in the Intrinsic Mode Functions section of this chapter.
0 1000 2000 3000 4000 5000 6000-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Profile Length (inches)
Deflection (
inches)

56
Figure 2.47: The original shifted profile.
It is difficult to know the precision or accuracy of the surface profiles collected by the ALPS2.
Figure 2.47 does not initially appear to show prominent “curl” data. This profile appears to
contain more “noise/surface texture”. This could be attributed to the ALPS2 machine, or
alternatively, the slab may not contain much “curl”.
Single slab configurations tend to produce different grouping results than the multiple slab
analysis. There are typically multiple IMFs that contribute to the NFUN group for single slabs,
whereas many times there is only one for multiple slab cases. Figure 2.48 shows substantial
amounts of ‘noise/surface texture” from the ALPS2 slab profile.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)

57
Figure 2.48: The NFUN group for ALPS2.
Figure 2.49: The CFUN group for ALPS2.
Due to the small magnitudes of “curl” deflection and the high magnitudes of deflection in the
NFUN group, the CFUNs contain large uncertainty. The functions contained within the original
slab profile with frequencies and wavelengths associated with “curl” are displayed in Figure 2.49.
0 20 40 60 80 100 120 140-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
Profile Length (inches)
Deflection (
inches)
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Profile Length (inches)
Deflection (
inches)

58
Figure 2.50: The BFUN group (—) with the original shifted profile (o).
The “base trend” for this single slab is linear, as shown in Figure 2.50.
Figure 2.51: The BFUNs+CFUNs (—) with the original shifted profile (o).
The significant problem with the profile displayed in Figure 2.51 is that the NFUNs shown in
Figure 2.48 contain deflection magnitudes that are greater than the CFUNs+BFUNs. This has
been observed frequently with cell 6 data collected by the ALPS2.
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)
0 20 40 60 80 100 120 140-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (inches)
Deflection (
inches)

59
ALPS2: Cell 6, Panel 3, Run 4
This second set of ALPS2 data from MnROAD was collected on 23-August-2011, at 3:58 p.m.,
during run 4. Although this data was also taken from cell 6, a different panel was chosen. As
with the previously analyzed ALPS2 profile, this second profile was collected transversely at the
middle of the slab.
Figure 2.52: The original shifted ALPS2 profile.
Similar to the previous ALPS2 profile, there is no obvious “curl” data displayed in Figure 2.52.
Again, this may be due to lack of “curl” in the slab or measurement error during collection.
0 20 40 60 80 100 120 140-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Profile Length (inches)
Deflection (
inches)

60
Figure 2.53: The NFUN group for ALPS2.
The three IMFs found during the sifting process were all NFUNs. The magnitudes of
“noise/surface texture” displayed in Figure 2.53 contain greater deflection magnitudes than the
CFUNs+BFUNs as shown in Figure 2.54.
Figure 2.54: The CFUNs+BFUNs (—) with the shifted original noisy profile (o).
0 20 40 60 80 100 120 140-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Profile Length (inches)
Deflection (
inches)
0 20 40 60 80 100 120 140-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Profile Length (inches)
Deflection (
inches)

61
Figure 2.54 depicts similar behavior to that observed in the previous ALPS2 data as shown in
Figure 2.51. That is, the magnitudes of deflections in the NFUN group are greater than the
deflections from the CFUNs+BFUNs combination. Because of this, these profiles are assumed to
be dominated by noise.
MnROAD IRI
The IRI profile used analyzed in this thesis was collected by the Minnesota Department of
Transportation (MnDOT) at the MnROAD research facility near Monticello, Minnesota. It was
collected from cell 6, on 19-Septemeber-2011, from the mainline (Interstate-94), during run 8-2.
The mainline is only in the westbound direction, and this IRI is from the right wheel path on the
driving panel side.
Figure 2.55: The original shifted IRI profile.
The original slab profile, shown in Figure 2.55, was extracted from a 500 foot long, cell 6 IRI
profile. This 15 foot long section was chosen specifically because it appeared to show
characteristics consistent with “curl”.
4 6 8 10 12 14 16 18 20 22-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Profile Length (feet)
Deflection (
inches)

62
Figure 2.56: The NFUN group for the MnROAD IRI profile.
The five IMFs extracted from this IRI single slab profile were all members of the NFUN group.
Figure 2.57: The CFUNs+BFUNs group (—) with the original shifted profile (o).
The CFUNs+BFUNs, shown in Figure 2.57, does not appear to follow the contour of the original
data well. This suggests that there are major inconsistencies and high levels of “noise/surface
texture” contained within the original profile. Although the CFUNs+BFUNs deflections are
4 6 8 10 12 14 16 18 20 22-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Profile Length (feet)
Deflection (
inches)
4 6 8 10 12 14 16 18 20 22-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Profile Length (feet)
Deflection (
inches)

63
larger than the NFUN’s for the IRI slab profile, this slab surface data may also be dominated by
noise.
Built-in Curl and Multiple vs. Single Slab Analysis
Now that the automated Hilbert-Huang based profile analysis methods have been proven effective
on a variety of real surface profile data, further analysis of CFUNs+BFUNs for field profiles will
be performed. CFUNs+BFUNs results from surface profiles collected at different times from an
Arizona LTPP section will be compared. Also, results from single and multiple slab
configurations will be analyzed for Arizona, Wisconsin, and Utah LTPP sections. A condensed
version of the automated profile analysis results will be provided in this section.
Arizona
An LTPP datapave profile from Arizona was used for analysis. This is the same section that was
analyzed previously in this Chapter 2 Results section of the thesis. The 0215 LTPP section
profile contains eleven 15’ long slabs, was collected on 1-25-2010, at 5:37 p.m., during run 1, and
the concrete is 11” thick. The left wheel path data was used for analysis. The automated Hilbert-
Huang based profile analysis algorithm was applied to the entire profile.

64
Figure 2.58: The original Arizona LTPP profile collected 1-25-2010.
The middle slab, shown in Figure 2.58, will used for CFUNs+BFUNs analysis to avoid edge
spiking effects from the sifting process.
Figure 2.59: The CFUNs+BFUNs (—) with the original middle slab profile (o) from
Arizona.
The CFUNs+BFUNs group is nearly free all NFUNs as shown in Figure 2.59.
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
Profile Length (inches)
Deflection (
inches)
900 920 940 960 980 1000 1020 1040 1060 1080 1100-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Profile Length (inches)
Deflection (
inches)

65
The same section of Arizona LTPP was analyzed in a similar fashion but with data was collected
on 9-20-2008, at 2:26 a.m., from section 0215, during run 2, from the left wheel path.
Figure 2.60: The Arizona LTPP section collected 9-20-2008.
The surface profile section displayed in Figure 2.60 shares some similarities with the profile
shown in Figure 2.58.
Figure 2.61: The raw middle three Arizona slab profiles from 2010 (—) and 2008 (o).
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Profile Length (inches)
Deflection (
inches)
700 800 900 1000 1100 1200 1300-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
Profile Length (inches)
Deflection (
inches)

66
A closer look at the middle slabs from the two raw profiles is displayed in Figure 2.61. The
middle slab shown in Figure 2.61 is the profile of interest. Notice the differences between the
two raw profiles. The CFUNs+BFUNs, as computed by the HHT algorithm, for the two different
profiles are compared below in Figure 2.62.
Figure 2.62: The CFUNs+BFUNs for the middle slabs collected in 2010 (—) and 2008 (o).
The two raw profiles displayed in Figure 2.61 are not nearly as similar as the two
CFUNs+BFUNs profiles shown in Figure 2.62. Once the NFUNs were removed, the
CFUNs+BFUNs for the two slab profiles closely resemble one another. These slabs were
collected approximately twenty months apart, during different seasons, and the CFUNs+BFUNs
profiles remain basically the same. This is most likely due to the early-age built-in curl within the
slabs.
A comparison of the CFUNs+BFUNs results using a multiple slab configuration, versus just a
single slab, during the analysis is shown below in Figure 2.63.
0 20 40 60 80 100 120 140 160 180-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
Profile Length (inches)
Deflection (
inches)

67
Figure 2.63: The single slab CFUNs+BFUNs (o) with the multiple slab
CFUNs+BFUNs (—).
The automated Hilbert-Huang based profile analysis program tends to extract CFUNs+BFUNs
more accurately when analyzing a multiple slab profile in comparison to a single slab profile as
shown in Figure 2.63.
0 20 40 60 80 100 120 140 160 180-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Profile Length (inches)
Deflection (
inches)

68
Wisconsin
A Wisconsin LTPP section was also analyzed. This LTPP profile section was collected on 6-9-
2008, from section 3009, during run 6, at 4:07 p.m., from the left wheel path. The section
contains concrete that is 8” thick.
Figure 2.64: The original LTPP profile from Wisconsin.
In similar fashion to the Arizona LTPP section, the entire Wisconsin profile shown in Figure 2.64
will first have the automated Hilbert-Huang based profile analysis program applied to it and a
middle slab (centered on x ≈ 800) will be extracted for CFUNs+BFUNs analysis. Single slab
profile analysis will then be performed and the CFUNs+BFUNs results will be compared.
0 200 400 600 800 1000 1200 1400 1600 1800-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Profile Length (inches)
Deflection (
inches)

69
Figure 2.65: The original middle slab profile (o) with the corresponding CFUNs+BFUNs
(—) from the multiple slab analysis.
The Hilbert-Huang based profile analysis algorithm does a good job of extracting the
CFUNs+BFUNs, for the middle slab, from a multiple slab Wisconsin profile as shown in Figure
2.65.
Figure 2.66: The original profile (o) with the corresponding CFUNs+BFUNs (—) from the
single slab analysis.
720 740 760 780 800 820 840 860 880-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Profile Length (inches)
Deflection (
inches)
720 740 760 780 800 820 840 860 880-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Profile Length (inches)
Deflection (
inches)

70
The CFUNs+BFUNs, shown in Figure 2.66, from the single slab analysis show smaller
deflections than the CFUNs+BFUNs from the multiple slab analysis displayed in Figure 2.65. A
direct comparison is shown below in Figure 2.67.
Figure 2.67: The CFUNs+BFUNs from multiple slab analysis (—) and from single slab
analysis (o).
As previously mentioned, the deflections of the CFUNs+BFUNs resulting from the multiple slab
analysis are greater than for the single slab analysis as shown in Figure 2.67. This is due to
“flattening” of the single slab during the sifting process.
720 740 760 780 800 820 840 860 880-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Profile Length (inches)
Deflection (
inches)

71
Utah
An eleven slab section from Utah LTPP data was also analyzed using the automated Hilbert-
Huang based profile analysis algorithm. This data is from section 3011, was collected on 10-9-
2007, at 3:01 p.m., during run 1, from the left wheel path. The section contains 10” thick
concrete and the slab lengths vary.
Figure 2.68: The eleven slab LTPP profile from Utah.
The same procedure used on the Arizona and Wisconsin LTPP sections will be applied to the
Utah profile shown in Figure 2.68. The slab profile used for analysis is centered on x ≈ 828.
0 200 400 600 800 1000 1200 1400 1600 1800 2000-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Profile Length (inches)
Deflection (
inches)

72
Figure 2.69: The original slab profile (o) with the CFUNs+BFUNs (—) from multiple slab
analysis.
The multiple slab analysis did a good job of extracting the CFUNs+BFUNs from the middle slab
profile as shown in Figure 2.69.
Figure 2.70: The original slab profile (o) with the CFUNs+BFUNs (—) from single slab
analysis.
700 750 800 850 900 950-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Profile Length (inches)
Deflection (
inches)
0 50 100 150 200 250-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Profile Length (inches)
Deflection (
inches)

73
It is best to apply this developed automated Hilbert-Huang based algorithm to multiple slab
profiles and extract middle slabs for analysis to avoid edge effects during the sifting process.
Spiking near the edges during the sifting process can cause distortions similar to what is shown
on the left side of Figure 2.70. A comparison of the CFUNs+BFUNs for the two different
analysis configurations is shown below in Figure 2.71.
Figure 2.71: The CFUNs+BFUNs from multiple slab analysis (—) and from single slab
analysis (o).
Once again, the multiple slab analysis did a superior job compared to the single slab analysis of
extracting the CFUNs+BFUNs from the Utah LTPP profile data. Therefore, multiple slab
analysis should be used whenever possible.
700 750 800 850 900 950-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Profile Length (inches)
Deflection (
inches)

74
CHAPTER 3: BACK-CALCULATING TEMPERATURE
GRADIENTS
3.1 Overview
Prior analysis, using the developed Hilbert-Huang based profile analysis method in Chapter 2,
showed that field slabs and road profile sections vary greatly. Temperature, time of year, weather
during construction, mix design, slab thickness and slab dimensions, among other variables,
affect the shape of a slab and the surface of a profile. The vast quantity of these uncontrolled
variables makes building an accurate surrogate model for field data a difficult task. Using
ISLAB2005 software, these variables can be controlled during artificial data generation and
subsequently, an accurate, computationally efficient surrogate surface model for artificial
pavement curling behavior can be constructed. Also previously discussed in Chapter 2, artificial
ISLAB2005 profiles, containing uniform randomly generated error, can be separated by their
IMFs to reveal the curl and base trend data in a “cleaner” form. This chapter will show how
combining this “cleaned” profile data with the constructed surrogate model, makes accurately
back-calculating temperature gradients through noisy ISLAB2005 slab profiles possible.
ISLAB2005 was chosen for this project because of the program’s ability to handle all the input
variables needed to build an accurate surrogate model surface. Multiple test runs, while varying
inputs for slab geometry, thickness and temperature gradients, provided the data required to build
the surrogate model. All other variables remained at the ISLAB2005 default values.
FORTRAN’s MSIMSL software package used the ISLAB2005 output data to construct surrogate
response surfaces using cubic-spline interpolation. Analysis of the model surface was performed
using DAKOTA. DAKOTA is a software package, developed at Sandia National Laboratories,
focused on optimization, parameter identification, and uncertainty quantification for large scale
computer based engineering models (DAKOTA, 2010). The optimization features of DAKOTA
are used to evaluate the surrogate surface models.
One should note that the ISLAB2005 output data, used to build the surrogate response surface,
came from a single slab scenario. Single slabs are free to move without the hindrances of dowel
bars, tie bars or other slabs. The presence of bars and adjoining slabs tend to retard the magnitude

75
of curling. More information on curling in the presence of dowel bars, tie bars and other slabs
can be found in Du Plessis et al. (2003).
Building the Surrogate Model
Before using cubic splines to build the surrogate model, an attempt was made to use quadratic
polynomial curve fitting within DAKOTA.
Figure 3.1 Comparison of typical quadratic polynomial curve fit with fitting data (o) and
ISLAB2005 (—) output data.
The difference between the two profiles as shown in Figure 3.1 is why this initial approach was
abandoned. Although DAKOTA’s quadratic surrogate surface was not accurate enough for the
needs of this project, some useful insights were gained. One important factor in building a
sufficient surrogate surface model is providing the correct input data. FORTRAN’s input
deflection and location data came directly as an output from ISLAB2005. Each time ISLAB2005
ran, a minimum of one input variable was changed (slab thickness, temperature through the slab,
or slab length). Experimenting with DAKOTA’s surface building made it clear that avoiding
extreme points (endpoints of the temperature or thickness range) provided more accurate results.
Separating positive and negative temperature gradient data, along with making the input variable
step size uniform, improved the accuracy of the results as well. For example, the model was
constructed to show temperature gradients from -30°F to +30°F. For the positive temperature

76
gradient portion, ISLAB2005 runs were performed every 3°F starting at 3°F and ending at 27°F.
This made the step size uniform throughout the variable range, kept the positive temperature
gradients separate from the negative, and also avoided the extreme temperature endpoints of 0°F
and 30°F. Keeping positive and negative temperature gradients separate, eight thickness inputs
and nine temperature inputs were sufficient for FORTRAN to build an acceptable surrogate
surface model. The transverse slab width was held constant at 12 feet and slab lengths ranged
from 12 to 18 feet.
FORTRAN’s BS3IN software was used to compute a cross tensor product spine in order to
interpolate in three dimensions. There were no extra constraints or conditions at the endpoints
making this type of sequence a “not-a-knot”. BS3IN returns the coefficients for the tensor-
product spline. These coefficients are the surrogate surface. Derivatives of the three-dimensional
surrogate are used to evaluate the surface and provide the output surface data for specified inputs
(Fortran, 1995).
The splines built a much more accurate surrogate surface model were very consistent with the
ISLAB2005 data. Figure 3.2 shows a typical relationship between ISLAB2005 and FORTRAN
output profile data.
Figure 3.2: Comparison of typical cubic spline surface (o) and ISLAB2005 (—) output data.
MATLAB was used to statistically analyze the surrogate surfaces for quality of fit. The quadratic
polynomial and cubic spline output profiles were compared with corresponding output profiles
0 20 40 60 80 100 120 140 160 1800.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Profile Length (inches)
Deflection (
inches)

77
from ISLAB2005. A MATLAB function ‘normest’ returns the norm of two matrices of the same
length and a ‘max’ command provides the maximum absolute value of the largest deflection
difference between two corresponding x-values over the entire profile. Decreasing the ‘norm’
and the ‘max’ magnitudes increases the likeness of the two profiles. A set of some typical
statistical results, from using the quadratic polynomial and cubic spline surfaces, are shown in
Table 2.
Slab
Thickness
Temperature
Gradient (°F)
Length (feet)
Distance from
Edge (inches)
Maximum
Error Using
Quadratic
Polynomials
Maximum
Error Using
Cubic Splines
12.125 3.75 15 12 0.0002 0.000048
7.750 15.00 15 24 0.0015 0.000042
9.500 11.25 15 36 0.0009 0.000039
Table 2: A statistical analysis for quadratic polynomial and cubic spline surface profiles
compared to ISLAB2005 outputs.
In slabs containing a non-zero temperature gradient, a profile’s distance from the edge of the slab
affects the deflection magnitudes due to curling. Figure 3.3 shows four longitudinal profiles for
an ISLAB2005 12’x15’ slab with a -15°F temperature gradient. Each profile is from a different
location on the slab surface.

78
Figure 3.3: Four profiles from a single slab as the distance from the edge varies. (‘+’ = 0”
from the edge; ‘*’ = 24” from the edge; ‘□’ = 48” from the edge; ‘◊’ = 72” from the edge)
As mentioned previously, a 12’x15’, 10” thick, single concrete slab containing a 15°F
temperature gradient will equate to a maximum ISLAB2005 predicted curl deflection of
approximately 0.0174 inches. Therefore, all magnitudes in the Maximum Error Using Quadratic
Polynomials portion of
Table 2 are too large for an effective inverse calculation of a temperature gradient. The cubic
splines were able to significantly decrease the maximum error between the surrogate model
outputs and ISLAB2005 outputs.
Temperature Back-Calculation Methods
Back-calculation of temperature gradients is performed by matching a sample profile, with
known thickness and distance from the edge, to the prediction surrogate model while varying the
temperature gradient. The profiles are matched using DAKOTA to minimize the objective
function in equation 11.
0 20 40 60 80 100 120 140 160 180-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
Profile Length (inches)
Deflection (
inches)

79
Objective function =
(11)
where i = 0, 1,…n and corresponds to the x-values in the vectors of the same length, ỹi =
displacement values in the sample profile, and yi = displacement values from the surrogate model
surface.
Multiple cubic spine surrogate surfaces are built as DAKOTA searches for the best match of
temperature gradient. Once DAKOTA converges on the optimal solution, the corresponding
least-squares value and the temperature gradient of the best surrogate slab surface are output.
This temperature gradient corresponds to the temperature gradient within the sample slab for
noise free surface profiles. This method has demonstrated to be successful for both positive and
negative temperature back-calculation.

80
3.2 Profile Analysis
A method has been developed to back-calculate temperature gradients through noise free
ISLAB2005 slabs containing curl. The next step is to apply this method to perform temperature
back-calculations on slabs containing noise. The noisy slab profiles will be “smoothed” using the
developed Hilbert-Huang based profile analysis algorithm discussed previously in Chapter 2.
Before noise was introduced, ISLAB2005 was used to generate five slab profiles. The slabs were
generated individually, then strung together to avoid complications pertaining to load transfer. In
addition, it should be noted that the surrogate surface was built assuming no load transfer
mechanisms. Load transfer mechanisms in any of the five slabs would retard curling, flawing the
temperature back-calculations. The IMFs are classified as NFUNs, CFUNs and BFUNs as
discussed in Chapter 2. The analysis was performed on profiles that are 30 inches from the
longitudinal edge of the slabs.
Figure 3.4: Five error free ISLAB2005 slabs strung together.
Figure 3.4 shows the five ISLAB2005 slabs strung together prior to the addition of noise. The
slabs are all 10” thick but contain slight variations in temperature gradients in an attempt to
0 100 200 300 400 500 600 700 800 900 10000.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Profile Length (inches)
Deflection (
inches)

81
mimic a real concrete pavement section containing small temperature gradient variations from
slab to slab.
Figure 3.5: The original noise induced profile shifted about the x-axis.
Figure 3.5 shows the five ISLAB2005 slabs after the addition of uniform random error
corresponding to ±15% of the magnitude of deflection at each data point. The slabs will be
referred to by number in increasing order from left to right. Therefore, the slab on the far left is
slab 1 and the slab on the far right is slab 5.
The dimensions and temperatures of the slabs are Slab 1: 12’x15’, -11°F ΔT, 10” thickness; Slab
2: 12’x15’, -13°F ΔT, 10” thickness; Slab 3: 12’x15’, -12°F ΔT, 10” thickness; Slab 4:
12’x15’, -11°F ΔT, 10” thickness; Slab 5: 12’x15’, -12°F ΔT, 10” thickness, respectively.
Temperature Analysis
Profile analysis and IMF grouping was performed by applying the automated Hilbert-Huang
based profile analysis MATLAB program and grouping methods as outlined in Chapter 2 to this
five slab profile. The CFUNs+BFUNs supply the “smoothed” profile to be used for temperature
back-calculation. Edge slabs are discarded due to spiking occurring during the sifting process.
0 100 200 300 400 500 600 700 800 900 10000.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
0.022
Profile Length (inches)
Deflection (
inches)

82
Figure 3.6: The CFUNs+BFUNs (—) with original noisy profile (o) for middle three slabs.
Figure 3.6 shows the smoothed profile along with the original noisy one for slabs 2, 3 and 4.
Separating the slabs at the joints allows for single slab temperature back-calculation analysis.
Figure 3.7: The CFUNs+BFUNs (—) with the original smooth profile (o) for slab 2.
Figure 3.7 shows that portions of noise and texture were not removed during the sifting process
for slab 2 but the deflections are similar to the original error free ISLAB2005 profile.
100 200 300 400 500 600 700 800-6
-4
-2
0
2
4
6
8
10
12
14x 10
-3
Profile Length (inches)
Deflection (
inches)
0 20 40 60 80 100 120 140 160 1800.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Profile Length (inches)
Deflection (
inches)

83
Figure 3.8: The CFUNs+BFUNs (—) with the original smooth profile (o) for slab 3.
The two profiles displayed in Figure 3.8 show many similarities. Therefore, one expects a very
accurate temperature gradient back-calculation for slab 3.
Figure 3.9: The CFUNs+BFUNs (—) along with the original smooth profile (o) for slab 4.
0 20 40 60 80 100 120 140 160 1800.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Profile Length (inches)
Deflection (
inches)
0 20 40 60 80 100 120 140 160 1800.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Profile Length (inches)
Deflection (
inches)

84
Most of the noise was removed by the NFUN group for slab 4 as shown in Figure 3.9. Although
not as congruent as the profiles shown in Figure 3.8 for the middle slab 3, the temperature back-
calculation result for slab 4 should be fairly accurate as well.

85
3.3 Results
Two different DAKOTA optimization packages were used to minimize the least-squared error
between the sample file and the surrogate profile. The first is a non-gradient method found in
DAKOTA’s APPS (asynchronous parallel pattern search) package. The other is taken from
DAKOTA’s OPT++ library. This gradient based method uses quasi-Newton methods to find the
desired minima (DAKOTA, 2010). For sample files with smooth input data, both methods are
acceptably accurate for back-calculating the correct temperature gradient. However, the OPT++
gradient based method has proven superior when evaluating profiles containing noise. Therefore,
OPT++ temperature back-calculation results from both the “noisy” profiles and the “smoothed”
profiles will be provided.
Slab 2:
This slab is 12’x15’, has a -13.0°F temperature gradient and is 10” thick. The OPT++ search
found the approximated temperature gradient to be -13.1°F before the NFUNs were removed
using the developed Hilbert-Huang based profile analysis algorithm. This is 0.1°F less than the
actual temperature used by ISLAB2005 to construct the original profile. After the NFUNs were
removed, the OPT++ search estimated the temperature gradient to be -12.9°F. This is 0.1°F
greater than the ISLAB2005 input value. The smoothing by the HHT based algorithm had very
little effect on temperature back-calculation on slab 2.
Slab 3:
Slab 3 is 12’x15’, contains a -12.0°F temperature gradient and is 10” thick. The OPT++ search
found the approximated temperature gradient to be -13.0°F before the NFUNs were removed.
This is 1.0°F less than the actual temperature used by ISLAB2005 to build the original profile.
The OPT++ search converged to -12.0°F after the NFUNs extracted from slab 3 were removed.
This is exactly the temperature ISLAB2005 used to build the slab profile. The Hilbert-Huang
based profile analysis algorithm greatly improved the temperature back-calculation results for
slab 3.

86
Slab 4:
Slab 4 is 12’x15’, contains a -11.0°F temperature gradient and is 10” thick. The OPT++ search
package found the optimal approximated temperature gradient to be -10.5°F before NFUN
removal. This is 0.5°F greater than the temperature used by ISLAB2005 to build the original slab
surface profile. After NFUNs were removed, OPT++ estimated the temperature gradient to be -
10.8°F. This is 0.3°F closer to the actual temperature of 11.0°F that was used in construction of
this slab. Again, the HHT based algorithm improved the temperature back-calculation results for
slab 4.
The Hilbert-Huang based algorithm has been verified to smooth slabs, by removing NFUNs, and
consequently increase the accuracy of back-calculated temperature gradients through artificial
slab profiles. The uniform random error introduced to the ISLAB2005 generated five slab profile
is less than what is typically observed in real field profile data. Therefore, it is expected that
separating and removing NFUNs would be of greater benefit when attempting to back-calculate
temperature gradients through real field slabs, compared to artificial.
Real Field Profile Data
After applying the automated Hilbert-Huang based profile analysis algorithm to artificial
ISLAB2005 profile data for temperature back-calculations, now a similar analysis will be
performed on real field profile data. Surface profile data from a Wisconsin LTPP section was
analyzed using the Hilbert-Huang based profile analysis algorithm previously in Chapter 2. The
corresponding extracted CFUNs+BFUNs will undergo manual temperature back-calculations
using ISLAB2005. As discussed in Chapter 2, the multiple slab configurations proved to be
superior to the single slab analysis and therefore only the middle slab result from the multiple slab
analysis will be used for temperature back-calculation.
The large deflections from the LTPP profile are assumed to be caused by early age built-in curl
within the pavement slabs. Current models, like ISLAB2005, do not take into account built-in
curl in their deflection model estimations. The ISLAB2005 deflections used for the temperature
back-calculations of the Wisconsin slab were taken 30” from the longitudinal edge of the slab,
similar to where a wheel path might be.

87
Figure 3.10: The original middle slab profile (o) with the corresponding CFUNs+BFUNs
(—) from the multiple slab analysis.
The CFUNs+BFUNs from the Wisconsin slab of interest that will be used for temperature back-
calculation is shown in Figure 3.10 (these same profiles were previously shown in Figure 2.65).
The temperature gradient in ISLAB2005 that correlates to similar “curl” for a slab of similar
dimensions and thickness is displayed in Figure 3.11.
The Wisconsin LTPP section, analyzed in Chapter 2 and previously shown in Figure 2.64, was
collected on 6-9-2008, from section 3009, during run 6, at 4:07 p.m., from the left wheel path.
The slab used for temperature back-calculations is 12’x12’ and 8” thick.
720 740 760 780 800 820 840 860 880-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Profile Length (inches)
Deflection (
inches)

88
Figure 3.11: An ISLAB2005 profile with -110.0° temperature gradient (—) and the
CFUNs+BFUNs from a middle Wisconsin slab (o).
The CFUNs+BFUNs deflections for a middle Wisconsin slab (previously shown in Figure 2.65)
correlate to an approximate ISLAB2005 temperature gradient of -110.0°F as shown in Figure
3.11. The large deflections are likely due to built-in curl and the correlating extreme temperature
gradient from ISLAB2005 is due to the model not taking into account built-in curl during
temperature deflection estimations.
720 740 760 780 800 820 840 860 880-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Profile Length (inches)
Deflection (
inches)

89
CHAPTER 4: CONCLUSIONS AND DISCUSSION
The Hilbert-Huang Transform
The developed Hilbert-Huang based pavement profile analysis algorithm can be used to
successfully separate surface profiles into “noise/surface texture”, “curl”, and “base trend”
sources. Trends from surface profiles were identified in ISLAB2005 profiles; ALPS2 profiles;
MnROAD IRI profiles; and Georgia, Wisconsin, Utah, and Arizona LTPP profiles. Not
surprisingly, ISLAB2005 artificial profiles with random uniform error were the most consistently
and accurately analyzed. The sifting process showed increased levels of “noise/surface texture”
to be present in real field data.
Due to spiking during sifting, it is best to discard the slabs near the edges for the multi-slab
scenarios and also to neglect them during IMF grouping classifications. The length and number
of slabs required for a multi-slab profile to be effectively decomposed and grouped varies with
the unique characteristics of each profile. Multiple slab configurations tend to provide better
separation of NFUNs, CFUNs, and BFUNs than single slab configurations, and should be used
with this developed profile analysis algorithm whenever possible.
An Arizona LTPP slab profile was shown to contain consistent “curl” deflections for the same
slab over a 20 month time-span and during both winter and early fall seasons. The consistent slab
shape is likely due to early age built-in curl.
Temperature Back-calculation
Surrogate surface models for artificial slabs can be built using cubic-splines of ISLAB2005
output data. Accurate back-calculation of temperature gradients for smooth profiles can be
performed by combining the constructed surrogate surface model with the DAKOTA
optimization package. Successful temperature gradient back-calculations can be performed on
noisy ISLAB2005 slabs as well, though only if noise is first removed by applying the developed
Hilbert-Huang based profile analysis methods. The OPT++ optimization search within
DAKOTA proved to be acceptable for accurately back-calculating temperature gradients for both
noisy and smooth profiles.

90
The CFUNs+BFUNs deflections observed within a real field slab profile from Wisconsin
correlate to an extreme ISLAB2005 predicted temperature gradient. This is likely due to the early
age built-in curl within the real field slab. Current curling models, like ISLAB2005, do not
account for built-in curl during temperature deflection estimations. In order for accurate
temperature back-calculations to be performed on real field slabs, the models must be altered to
consider built-in curl when computing numerical solutions.

91
BIBLIOGRAPHY
1. Adams, B. M., Dalbey, K. R., Eldred, M. S., Gay, D. M., and Swiler, L. P. DAKOTA, A
Multilevel Parallel Object-Oriented Framework for Design Optimization, Parameter
Estimation, Uncertainty Quantification, and Sensitivity Analysis. Version 5.0 User’s
Manual. Sandia National Laboratories. 2010.
2. Adu-Gyamfi, Y. O., Attoh-Okine, N. O., and Ayenu-Prah, A. Y. Critical Analysis of
Different Hilbert-Huang Algorithms for Pavement Profile Evaluation. Journal of
Computing in Civil Engineering, Vol. 24. No. 6. 2010.
3. Altoubat, S. A., and Lange, D. A. Creep, shrinkage, and cracking of restrained concrete
at early age. ACI Mater. J., 98, 323–331. 2001.
4. Armaghani, J. M., Larsen, T. J., and Smith, L. L. Temperature Response of Concrete
Pavements. Transportation Research Record 1121. TRB. National Research Council.
Washington, D.C. pp. 23–33. 1997.
5. Asbahan, R. and Vandenbossche, J. Effects of Temperature and Moisture Gradients on
Slab Deformation for Jointed Plain Concrete Pavements. pp 563-570. Journal of
Transportation Engineering. Volume: 137. 2011
6. Attoh-Okine, N. O., Ayenu-Prah, A. Y. Jr., and Mensah, S. A. Application of the
Empirical Mode Decomposition to Pavement Profile Analysis. Department of Civil and
Environmental Engineering. University of Delaware. 2006.
7. Ayenu-Prah, Albert and Attoh-Okine, N. Evaluating Pavement Cracks with
Bidimensional Empirical Mode Decomposition. Department of Civil and Environmental
Engineering. University of Delaware. 2008.

92
8. Ayenu-Prah, A. Y. and Attoh-Okine, N. O. Comparative Study of Hilbert-Huang
Transform, Fourier Transform and Wavelet Transform in Pavement Profile Analysis.
Department of Civil and Environmental Engineering. University of Delaware. 2009.
9. Barzegar, F. Layering of RC Membrane and Plate Elements in Nonlinear Analysis.
Journal of Structural Engineering. Vol. 114. No. 11. pp. 2474–2492. 1988.
10. Beckemeyer, C. A., Khazanovich, L., and Yu, H. T. Determining the Amount of Built-in
Curling in JPCP: A Case Study of Pennsylvania I-80. Transportation Research Board
Annual Meeting. Washington, D.C. 2002.
11. Bradbury, R.D. Reinforced Concrete Pavements. Wire Reinforcement Institute.
Washington D.C. 1938.
12. Byrum, C. Analysis by High-Speed Profile of Jointed Concrete Pavement Slab
Curvatures. Transportation Research Record: Journal of the Transportation Research
Board. 1730:1–9. 2000.
13. Byrum, C. R. Measuring Curvature in Concrete Slabs and Connecting the Data to Slab
Modeling Theory. Journal of the Transportation Research Board. No. 2094. pp 79-88.
2009.
14. Choubane, B., and Tia, M. Analysis and Verification of Thermal-Gradient Effects on
Concrete Pavement. Journal of Transportation Engineering. 121(1). pp. 75-81. 1995.
15. Cole, M. K., and Clyne, T. R. MnROAD Cell 4 Forensic Investigation. Minnesota Road
Research Project. Minnesota Department of Transportation. 2010.
16. Du Plessis, L. and Harvey, J. Environmental Influences on the Curling of Concrete Slabs
at the Palmdale HVS Test Site. Pavement Research Center Institute of Transportation
Studies University of California. 2003.

93
17. Eisenmann, J., and Leykauf, G. Effects of Paving Temperatures on Pavement
Performance. Proc. 2nd International Workshop on the Theoretical Design of Concrete
Pavements. Spain. 1990.
18. Eisenmann, J. and Leykauf, G. Simplified Calculation Method of Slab Curling Caused by
Surface Shrinkage. Proc. 2nd International Workshop on the Theoretical Design of
Concrete Pavements. Spain. pp. 185–197. 1990.
19. Fortran 90 Users Guide. Sun Microsystems Inc. Mountain View, California. 1995.
20. Gotlif, A., Mallela, J. and Khazanovich, L. Finite Element Study of Partial-Depth Cracks
in Restrained PCC Slabs. International Journal for Pavement Engineering, 7(4):323-329.
2006.
21. Guo, E. H. Back-Estimation of Slab Curling and Joint Stiffness. 7th International
Conference on Concrete Pavements. Orlando, FL. 2001.
22. Hilbert-Huang Transform and Its Applications. Edited By: Huang, Norden E. and Shen,
Samuel S.P. World Scientific Publishing Company. Singapore. 2005.
23. Huang, Norden E. Introduction to the Hilbert-Huang Transform and its Related
Mathematical Problems. World Scientific Publishing Co. Pte. Ltd. Hackensack, NJ.
2005.
24. Huang, N. E. Shen, Z., Long, S. R., Wu, M.-L. C., Shih, H. H., Zheng, Q., Yen, N.-C.,
Tung, C. C. and Liu, H. H. The Empirical Mode Decomposition and the Hilbert
Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proceedings:
Mathematical, Physical and Engineering Sciences. Vol. 454. No. 1971. pp. 903-995.
The Royal Society. 1998.

94
25. Huang, Y. H., and Wang, S. T. Finite-Element Analysis of Rigid Pavements with Partial
Subgrade Contact. Transportation Research Record 485. National Research Council.
Washington, D.C. pp. 39–54. 1974.
26. Huang, N. E., Wu, M.-L. C., Long, S. R., Shen, S.-S. P., Qu, W., Gloersen, P. and Fan,
K. L. A Confidence Limit for the Empirical Mode Decomposition and Hilbert Spectral
Analysis. The Royal Society. 2003.
27. Huang, N. E. and Wu, Z. A Review on Hilbert-Huang Transform: Method and its
Applications to Geophysical Studies. American Geophysical Union. 2008.
28. Ioannides, A. M., Davis, C. M., and Weber, C. M. Westergaard Curling Solution
Reconsidered. Transportation Research Record (1684). pp. 61-70. 1999.
29. Ioannides, A., and Khazanovich, L. Nonlinear Temperature Effects in Multi-Layered
Concrete Pavements. ASCE Journal of Transportation Engineering. 124(2):128–136.
1998.
30. Izevbekhai, B. I., and Franta, D. P. Beneficial Investment in Pavement Surface Acoustics
(A Case Study). Minnesota Department of Transportation. Accepted for Internoise
Conference. New York City. 2012.
31. Jeong, J. H., and Zollinger, D. G. Early-Age Curling and Warping Behavior.
Transportation Research Board Annual Meeting, Washington, D.C. 2004.
32. Jeong, J. H., Wang, L., and Zollinger, D. G. A Temperature and Moisture Module for
Hydrating Portland cement Concrete Pavements. Proc., 7th Int. Conf. on Concrete
Pavements. Orlando, Fla. 2001.
33. Khazanovich, L., Yu, T. and Beckemeyer, C.A. Application of ISLAB2000 for Forensic
Studies. Proceedings of the Second International Symposium 3D Finite Element for
Pavement Analysis, Design, and Research. 433–450. Charleston, WV. USA. 2000.

95
34. Khazanovich, L. Structural Analysis of Multi-Layered Concrete Pavement Systems. Ph.
D. Thesis. University of Illinois. Urbana, Illinois. 1994.
35. Khazanovich, L. and Yu, T. Modeling of Jointed Plain Concrete Pavement Fatigue
Cracking in Pavespec 3.0. Transportation Research Record: Journal of the
Transportation Research Board, 1778:33–42. 2001.
36. Korovesis, G. T. Analysis of Slab-On-Grade Pavement Systems Subjected to Wheel and
Temperature Loadings. Ph.D. Thesis. University of Illinois. Urbana, Illinois. 1990.
37. Kropáč, O. and Múčka, P. Specification of Obstacles in the Longitudinal Road Profile by
Median Filtering. Journal of Transportation Engineering, Vol. 137. No. 3. 2011.
38. Lothschutz, R. W., Lederle, R. E., and Hiller, J. E. Field Evaluation of Built-In Curling
Levels in Rigid Pavements. Michigan Technological University. Department of Civil
and Environmental Engineering. 2011.
39. Mailyaganam, N., Springfield, J., Repette, W., and Taylor, D. Curling of Concrete Slabs
on Grade. National Research Council Canada. 2000.
40. Mechanistic-Empirical Pavement Design Guide, Interim Edition: A Manual of Practice.
American Association of State Highway and Transportation Officials (AASHTO),
Washington, D.C. 2008.
41. MATLAB Primer. R2012a. The MathWorks Inc. Massachusetts. 2012.
42. Newland, D. E. An Introduction to Random Vibrations and Spectral Analysis. Second
Edition. Longman Scientific & Technical. New York. 1984.

96
43. Peng, Z.K., Tse, P. W. and Chu, F.L. A Comparison Study of Improved Hilbert-Huang
Transform and Wavelet Transform: Application to Fault Diagnosis for Rolling Bearing.
Mechanical Systems and Signal Processing, 974-988. 2003.
44. Perera, R. W., Starr, K. D., and Bemanian, S. Comparison of Road Profilers.
Transportation Research Record 1536. Nevada Department of Transportation. 1996.
45. Rao, C., Barenberg, E. J., Snyder, M. B., and Schmidt, S. Effects of Temperature and
Moisture on the Response of Jointed Concrete Pavements. 7th International Conference
on Concrete Pavements. Orlando, FL. 2001.
46. Rao, S. P. Characterizing Effective Built-In Curling and Its Effect on Concrete Pavement
Curling. Dissertation, University of Illinois at Urbana-Champaign. Urbana, IL. 2005.
47. Rao, S. and Roesler, J. Characterizing Effective Built-In Curling from Concrete
Pavement Field Measurements. J. Transp. Engrg. Volume 131. Issue 4. pp. 320-327.
April 2005.
48. Rasmussen, Robert O., Karamihas, S. M., Cape, W. R., Chang, G. K., Guntert, R. M. Jr.
Stringline Effects on Concrete Pavement Construction. Transportation Research Record:
Journal of the Transportation Research Board. No. 1900. TRB. National Research
Council. Washington, D.C. 2004. pp.3-11.
49. Sayers, M. W., Karamihas, S. M. The Little Book of Profiling. University of Michigan.
1998.
50. Sayers, M. W. On the Calculation of International Roughness Index from Longitudinal
Road Profile. University of Michigan Transportation Research Institute. Ann Arbor,
Michigan. 1995.
51. Schindler, A. K., and McCullough, Frank B. Importance of Concrete Temperature
Control During Concrete Pavement Construction in Hot Weather Conditions.
Transportation Research Record 1813 _ 3. Paper No. 02-3636. 2002.

97
52. Schlurmann, T. Spectral Analysis of Nonlinear Water Waves Based on the Hilbert-
Huang Transformation. The American Society of Mechanical Engineers. 2001.
53. Shoukry, Samir N. Backcalculation of Thermally Deformed Concrete Pavements.
Transportation Research Record 1716 Paper No. 00-1175. 2000.
54. Suh, C. Kim, D. and Won, M. Development of the Thickness Design for Concrete
Pavement Overlays over Existing Asphalt Pavement Structures. Center for
Transportation Research. The University of Texas at Austin. 2008.
55. Tang, T., Zollinger, D. G., and Senadheera, S. Analysis of Concave Curling in Concrete
Slabs. Journal of Transportation Engineering. 119(4). 618-633. 1993.
56. The Hilbert-Huang Transform in Engineering. Edited by: Huang, Norden E. and Attoh-
Okine, Nii O. Taylor and Francis Group, LLC. Florida. 2005.
57. Thomlinson, J. Temperature Variations and Consequent Stresses Produced by Daily and
Seasonal Temperature Cycles in Concrete Slabs. Concrete Constructional Engineering.
Vol. 36. No. 6. pp. 298-307. Number 7. pp. 352-360. 1940.
58. Vandenbossche, J. An evaluation of the built-in temperature difference input parameter
in the jointed plain concrete pavement cracking model of the Mechanistic-Empirical
Pavement Design Guide International Journal of Pavement Engineering. Volume 12.
Issue 3. pp 215-228. 2010.
59. Vandenbossche, J. Quantifying Built-in Construction Gradients and Early-Age Slab
Shape to Environmental Loads for Jointed Plain Concrete Pavements Transportation.
Research Board 85th Annual Meeting. 23p. 2006.

98
60. Wilde, J. W., Izevbekhai, B. I., and Krause, M. H. Comparison of Profile Index and
International Roughness Index for Pavement Smoothness Incentive Specifications.
Department of Mechanical and Civil Engineering Minnesota State University, Mankato.
Submitted to the Transportation Research Board for the 2007 Annual Meeting. 2006.
61. Westergaard, H. M. Analysis of Stresses in Concrete Pavements due to Variations of
Temperature. Proceedings of Highway Research Board. Vol. 6. National Research
Council. Washington D.C. pp. 201-217. 1927.
62. Westergaard, H. M. Stresses in Concrete Pavements Computed by Theoretical Analysis.
Federal Highway Administration. Washington D.C. 1926.
63. Wu, M.-C., and Hu, C.-K. Emperical Mode Decomposition and Synchrogram Approach
to Cardiorespiratory Synchronization. The American Physical Society. 2006.
64. Wu, Z. and Huang, N. E. A Study of the Characteristics of White Noise Using the
Empirical Mode Decomposition Method. The Royal Society. 2004.
65. Yu, T., Khazanovich, L., Darter, M.I., and Ardani, A. Analysis of Concrete Pavement
Responses to Temperature and Wheel Loads Measured from Instrumented Slabs.
Transportation Research Record: Journal of the Transportation Research Board. 1639:94–
101. 1998.
66. Yu, T. and Khazanovich, L. Effect of Construction Curling on Concrete Pavement
Behavior. Proceedings of the Seventh International Conference on Concrete Pavements.
55–68. Lake Buena Vista, FL. USA. 2001.

99
APPENDIX A
Hilbert-Huang Profile Analysis Program in MATLAB
MATLAB, short for matrix laboratories, refers to the interactive computer language and software
that allows for faster and more efficient computational analysis than C++ or FORTRAN
(MATLAB, 2012). A MATLAB code was compiled to perform the empirical mode
decomposition process, contained within the Hilbert-Huang Transform, internally.
Instructions:
1) Open the Hilbert_Huang_Transform.m program in MATLAB.
2) At the top of the code, set the tolerance of the running mean, e.g. tol = 0.0003; The
optimum tolerance value will vary based on the data set. The goal is to have the program
converge under the smallest tolerance value that is possible. See step 8 for more detail on
this.
3) Also near the top, set the num_IMF to the number of intrinsic mode functions (IMFs) the
program should attempt to compute. If there are less IMFs in the data set than what is
specified in the num_IMF initialization, the program will terminate once the maximum
number of IMFs are found and IMF Sifting Complete will be shown in the command
window. The results will then be available to the user. If an entire analysis of a data set
is desired, it is a good idea to set the search for the IMFs to a high number, e.g.
num_IMF = 20.
4) Create a text file titled func1.txt in the MATLAB directory.
5) Prepare the data set of interest following the format in Figure A.1. The length and step
size are not important but the columns must be labeled correctly and must be of the same
length.
6) Copy and paste the data of interest into func1.txt and save it in the MATLAB directory.
7) Run the program. If it remains in the Busy mode for more than a 30 seconds, terminate
the program using Ctrl+‘C’. Reset the tol value at the top of the code to a larger value,
save and run the program again. It is a good idea to adjust the tolerance to the lowest
value that allows the program to run. Typically, the program will run sufficiently and
converge successfully in less than 10 seconds.

100
8) Once the tolerance has been set correctly and the program has converged, the next step is
to extract the results.
9) In the MATLAB workspace, locate the matrices IMF, num_sift, residue, yfit and y_shift.
Figure A.1: The format required for the input data.
10) IMF holds all the intrinsic mode functions from the original data set in column vector
form with column 1 corresponding to the first IMF, column 2 corresponding to the
second, and so on. Copy and paste these IMFs into a .xls spreadsheet.
11) num_sift corresponds to the number of sifting iterations that took place for each IMF.
Each value is the total number of sifts that took place up to that point. For example, if the
number of sifts to reach the fifth IMF is desired, subtract the value in column 4 from the
value in column 5. This is not important in most analyses. However, if any IMF has
been found with < 3 sifts taking place, the initialized tol value is too high. Return to step
7 and reduce the tolerance.
12) residue contains the same number of vectors as the IMF matrix. Again, column 1 is
residue 1, column 2 is residue 2 and so on. Copy and paste these into the spreadsheet.
13) yfit is the y(x)fit vector from Chapter 2 that is removed from the original profile to shift
the data about the x-axis in order that the HHT can be applied. This vector is required to
return a profile to its original position. Copy and paste this vector into the spreadsheet.
14) y_shift is the profile zeroed on the x-axis. This corresponds to y(x)shift from Chapter 2.
Therefore, in the automated program y_shift = y – yfit. Copy and paste this vector also
into the Excel spreadsheet.

101
All the data of interest should now be contained in an excel file. From here, further analysis or
grouping can be performed manually. Grouping methods for pavement profiles are discussed in
Chapter 2.