Embed Size (px)
Citation preview

Complex Shallow Water Simulations throughLattice-Boltzmann-based Mesoscopic NumericalTreatment Exploiting Hybrid Compute Nodes
Markus Geveler
Institut fur Angewandte MathematikTU Dortmund, Germany
GS11Shallow Water Simulations on GPUs
Long Beach, March 23, 2011
Motivation
The real world is ...
multiphysics
real-time
Challenges in Fluid Simulation
problems/functionality constraints constantly emerging
computational resource/memory/storage/energy -demand increasingdramatically
computational hardware undergoes paradigm-shift
parallel deprecates serial thinkingnumerics must be fitted to hardwaremultiple levels of parallelism (SIMD, shared on chip, distributednodes,...)chip-designs are heterogeneousprogramming environments diverging...
(software-)projects become hard to handle

Motivation
When speaking of compute nodes...
1-8 GB/s
PCIe
1-2 GB/s
Infiniband (PCIe)
CPU-Socket
cores
caches
6-35 GB/s
Host Memory
20-180 GB/s
GPU
DeviceMemory
cores
caches
...
SIM
T-M
P
SIM
T-M
P
shared caches and MCs
...
... SIM
T-M
P
SIM
T-M
P

Motivation
Simplification
using SWE is a simplification on the model-level
other levels:
numerical method(s)computational accuracy
Modification on the discrete and model levels and adjustment tohardware
pure macroscopic approach: modification on the PDE-level →discretisation
pure microscopic approach: modification on discrete-level →reconstruct continuum
LBM is mesoscopic: allows both

LBM for SWE
Discrete phase space, general form of LBM: collision and streaming
eα =
(0, 0) α = 0
e(cos (α−1)π4 , sin (α−1)π
4 ) α = 1, 3, 5, 7√2e(cos (α−1)π
4 , sin (α−1)π4 ) α = 2, 4, 6, 8,
The LBE
fα(x + eα∆t, t+ ∆t) = fα(x, t) +Q(fα, fβ), β = 1, ..., k .

LBM for SWE
Collision operator
f tempα (x, t) = fα(x, t)− 1
τ(fα − feqα )
Equilibrium distribution for Shallow Water Equations
f eqα =
h(1− 5gh
6e2 −2
3e2uiui) α = 0
h( gh6e2 + eαiui3e2 +
eαjuiuj2e4 − uiui
6e2 ) α = 1, 3, 5, 7
h( gh24e2 + eαiui
12e2 +eαjuiuj
8e4 − uiui24e2 ) α = 2, 4, 6, 8
Physical quantities
h(x, t) =∑α
fα(x, t) and ui(x, t) =1
h(x, t)
∑α
eαifα,
→ dry states?

Boundary conditions
Simple bounce-back
Accuracy
LBM in general: 2nd order in space, 2nd order in time
bounce back gives 1st order in space for boundary sites
often: porous media, non-axis-aligned geometry → sufficient?
LBM for SWE
Source terms become additive force terms
fα(x+eα∆t, t+∆t) = fα(x, t)− 1
τ(fα−feqα )+
∆t
6e2eαiSi, α = 0, . . . , 8.
with (bed slope and friction)
Si = −g(h∂b
∂xi+ n2bh
− 13ui√ujuj
)→ numerical scheme?

SWE with FSI
Idea Ingredients
moving boundaries
fluid initialisation
momentum exchange
dynamic lattice → implementation

SWE with FSI
Boundary conditions for moving boundary: BFL
f temp−β (x, t+ ∆t) = C1(q)fβ(x, t) + C2(q)fβ(x + e−β , t) + C3(q)f−β(x, t)+
C4(q)2∆xw−βc−2s [uB(bβ) · e−β ],
quality-down: q = 1/2⇒
f temp−β (x, t+ ∆t) = 6∆x w−β(uB(bβ) · e−β).
SWE with FSI
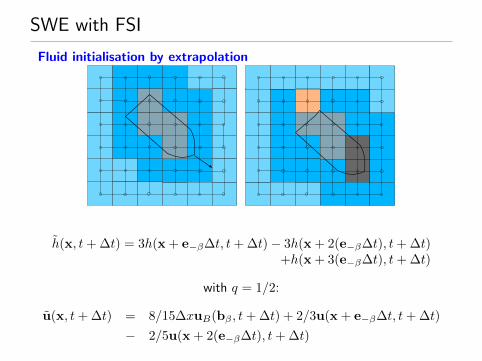
Fluid initialisation by extrapolation
h(x, t+ ∆t) = 3h(x + e−β∆t, t+ ∆t)− 3h(x + 2(e−β∆t), t+ ∆t)+h(x + 3(e−β∆t), t+ ∆t)
with q = 1/2:
u(x, t+ ∆t) = 8/15∆xuB(bβ , t+ ∆t) + 2/3u(x + e−β∆t, t+ ∆t)
− 2/5u(x + 2(e−β∆t), t+ ∆t)

SWE with FSI
Momentum Exchange Algorithm
fMEA−β (b, t) = eβi(f
tempβ (x, t) + f temp
−β (x, t+ ∆t)).
The forces can be aggregated into the total force acting on b:
F (b, t) =∑α
fMEAα (b, t).
x
q
u b
MEA
b

Implementation: A word on HPC software
HONEI
primary design goals: abstract from target-hardware, exploit allresources in a node
support natively:x86 SIMD (handcrafted SSE2 using intrinsics)x86 multi-core (pthreads)distributed memory clusters (MPI)NVIDIA GPUs (CUDA 3) + multiple GPUs + hybrid computationsCell BE (libspe2)
unittest + benchmark frameworks, visualisation
build system to create SPE kernels for Cell BE, CUDA-kernels
thread-management, MPI
support for RTTI and exception-handling, memory transfers
RPC system to call SPE programs from the PPE
templates to facilitate development of new callable SPE functionsand registering them with the RPC system
automatic job scheduling
...

Implementation: packed lattice
One datastructure fits all
compress lattice: stationary obstacles
store contiguously in memory
instationary obstacles (moving solids): colouring
cut domain in one dimension
patch 0 patch 1

Implementation: GPU
Shared memory: general
cache lattice velocities eαi
Memory arbitration
external device memory management
works ’behind the scenes’
transfers only if necessary
Complex kernels (force, FSI)
avoid branch-divergence
cache factors in force terms
cache extrapolation weights

Implementation: Inhomogeneous SWE
Dry-states
1 define fluid sites with h < ε as dry: h← 0, ui ← 0
2 confine local oscillations:
φU (x) = max(−U,min(U, x))
Centred scheme for slope term
Si = Si(x, t) insufficient, Si = Si(x+1
2eα∆t, t+∆t) prohibitively expensive!
Solution: Si = Si(x + 12eα∆t, t) ([Zhou 2004])
Implementation: dynamic lattice
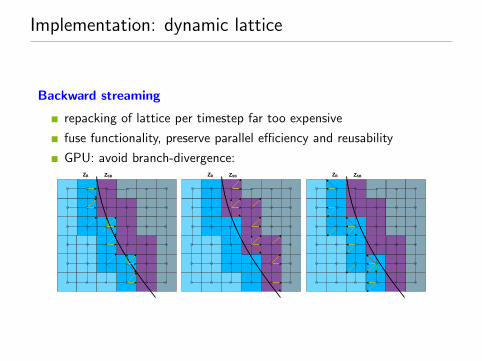
Backward streaming
repacking of lattice per timestep far too expensive
fuse functionality, preserve parallel efficiency and reusability
GPU: avoid branch-divergence:

Implementation: hybrid compute nodes
Composition of hybrid solver: example
3 patches of domain initially
1 patch subdivided for the MultiCore backend
each of the four MC-threads use the SSE backend
resulting in utilisation of two GPUs and all cores of the (quadcore)CPU
Hybrid LBM Solver
GPU::CUDA GPU::CUDA CPU::MultiCore::SSE
CPU::SSE CPU::SSE CPU::SSE CPU::SSE

Results
Numerical properties
approved: manydifferent simulations
well suited for CG
finding solverparameters is hard
timestep usually small
stabilisation stillexperimental

Results
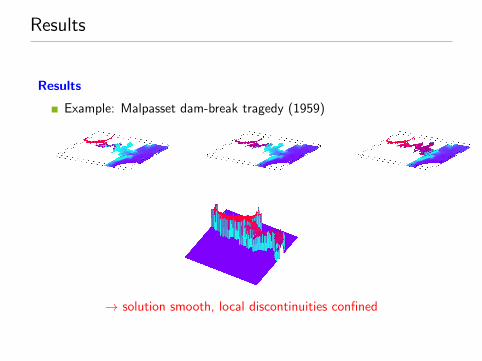
Method even works for ’real-world’ problems
Example: Malpasset, France - arch dam-break tragedy (1959): 451kills, ˜$70 M worth of damage
Results
Results
Example: Malpasset dam-break tragedy (1959)
→ solution smooth, local discontinuities confined

Results
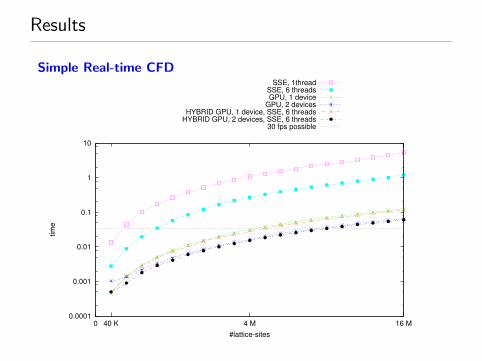
Performance: core i7 Gulftown 980 X, 3.33GHz Hexacore + 2 ×FERMI (Tesla C2070)
0
50
100
150
200
250
300
40 K 4 M 16 M
MF
LU
PS
#lattice-sites
SSE, 1threadSSE, 6 threadsGPU, 2 devicesGPU, 1 device
HYBRID GPU, 1 device, SSE, 6 threadsHYBRID GPU, 2 devices, SSE, 6 threads
Results
Simple Real-time CFD
0.0001
0.001
0.01
0.1
1
10
0 40 K 4 M 16 M
tim
e
#lattice-sites
SSE, 1threadSSE, 6 threadsGPU, 1 device
GPU, 2 devicesHYBRID GPU, 1 device, SSE, 6 threads
HYBRID GPU, 2 devices, SSE, 6 threads30 fps possible

Conclusions
Real-time and beyond
LBM well suited for multi-level parallelism due to data locality
up to 9 M lattice sites in real time possible (30 fps)
Malpasset dam break simulation running at 1,100 fps
GPU + CPU works well, only for very small problems →synchronisation too expensive
Remarks
basic LB-methods easy to implement, extend, maintain, ...
very sophisticated HPC LBM codes available → www.skalb.de

Acknowledgements
Supported by BMBF, HPC Software fur skalierbare Parallelrechner: SKALBproject 01IH08003D.
Thanks to Dirk Ribbrock and all contributors to HONEI. Thanks to RRZE forhardware access.





























