Embed Size (px)
Citation preview

653
Complex Analysis and Dynamical Systems VIPart 1: PDE, Differential Geometry, Radon Transform
Sixth International Conference onComplex Analysis and Dynamical Systems
in Honor of David Shoikhet on the Occasion of His Sixtieth BirthdayMay 19–24, 2013Nahariya, Israel
Mark L. AgranovskyMatania Ben-Artzi
Greg GallowayLavi Karp
Dmitry KhavinsonSimeon Reich
Gilbert WeinsteinLawrence Zalcman
Editors
American Mathematical SocietyProvidence, Rhode Island
Bar-Ilan UniversityRamat-Gan, Israel

Complex Analysis and Dynamical Systems VIPart 1: PDE, Differential Geometry, Radon Transform
Sixth International Conference onComplex Analysis and Dynamical Systems
in Honor of David Shoikhet on the Occasion of His Sixtieth BirthdayMay 19–24, 2013Nahariya, Israel
Mark L. AgranovskyMatania Ben-Artzi
Greg GallowayLavi Karp
Dmitry KhavinsonSimeon Reich
Gilbert WeinsteinLawrence Zalcman
Editors

David Shoikhet

653
Complex Analysis and Dynamical Systems VIPart 1: PDE, Differential Geometry, Radon Transform
Sixth International Conference onComplex Analysis and Dynamical Systems
in Honor of David Shoikhet on the Occasion of His Sixtieth BirthdayMay 19–24, 2013Nahariya, Israel
Mark L. AgranovskyMatania Ben-Artzi
Greg GallowayLavi Karp
Dmitry KhavinsonSimeon Reich
Gilbert WeinsteinLawrence Zalcman
Editors
American Mathematical SocietyProvidence, Rhode Island
Bar-Ilan UniversityRamat-Gan, Israel

EDITORIAL COMMITTEE
Dennis DeTurck, managing editor
Michael Loss Kailash Misra Martin J. Strauss
Editorial Board of Israel Mathematical Conference Proceedings
Louis Rowen, Bar-Ilan University, managing editor
Z. Arad, Netanya Academic College M. Katz, Bar-Ilan UniversityJ. Bernstein, Tel-Aviv University L. Small, University of CaliforniaH. Furstenberg, Hebrew University L. Zalcman, Bar-Ilan UniversityS. Gelbart, Weizmann Institute at San DiegoV. Gol′dshtein, Ben-Gurion University
Miriam Beller, Technical Editor
2010 Mathematics Subject Classification. Primary 35-XX, 44-XX, 47-XX, 53XX, 83XX.
Library of Congress Cataloging-in-Publication Data
International Conference on Complex Analysis and Dynamical Systems (6th : 2013 : Nahariya,Israel): Israel mathematical conference proceedings : complex analysis and dynamical systemsVI, sixth international conference, in honor of David Shoikhet’s 60th birthday : May 19–24, 2013,Nahariya, Israel / Mark L. Agranovsky [and seven others], editors.
volumes cm. – (Contemporary mathematics ; volumes 653, 667)The Sixth International Conference on Complex Analysis and Dynamical Systems took place atthe Carlton Hotel, Nahariya, Israel, May 19–24, 2013–Preface.
Includes bibliographical references.Contents: Part 1. PDE, differential geometry, radon transform – Part 2. Complex analysis.ISBN 978-1-4704-1653-9 (part 1 : alk. paper) – ISBN 978-1-4704-1703-1 (part 2 : alk. paper)
1. Functions of complex variables–Congresses. 2. Calculus of variations–Congresses. 3. Numericalanalysis–Congresses. 4. Differential equations–Congresses. I. Agranovskii, M. L. (Mark L’vovich),editor. II. Shoiykhet, David, 1953– III. Title. IV. Title: Complex analysis and dynamicalsystems VI.QA331.7.I58 2013515’.9–dc23 2015020099
Contemporary Mathematics ISSN: 0271-4132 (print); ISSN: 1098-3627 (online)
DOI: http://dx.doi.org/10.1090/conm/653
Color graphic policy. Any graphics created in color will be rendered in grayscale for theprinted version unless color printing is authorized by the Publisher. In general, color graphics willappear in color in the online version.Copying and reprinting. Material in this book may be reproduced by any means for educa-tional and scientific purposes without fee or permission with the exception of reproduction byservices that collect fees for delivery of documents and provided that the customary acknowledg-ment of the source is given. This consent does not extend to other kinds of copying for generaldistribution, for advertising or promotional purposes, or for resale. Requests for permission forcommercial use of material should be addressed to the Managing Editor, IMCP, Department ofMathematics, Bar-Ilan University, Ramat-Gan, 52900 Israel. Requests can also be made by emailto [email protected].
Excluded from these provisions is material in articles for which the author holds copyright. Insuch cases, requests for permission to use or reprint should be addressed directly to the author(s).(Copyright ownership is indicated in the notice in the lower right-hand corner of the first page ofeach article.)
c© 2015 by Bar-Ilan University. Printed in the United States of America.
©∞ The paper used in this book is acid-free and falls within the guidelinesestablished to ensure permanence and durability.
Visit the AMS home page at http://www.ams.org/
10 9 8 7 6 5 4 3 2 1 20 19 18 17 16 15

ContentsI: PDE, Differential Geometry, Radon Transform
Preface ix
David Shoikhet at SixtyMark Agranovsky, Mark Elin, and Lawrence Zalcman xi
Bibliography of David Shoikhet xv
Conference Program xxiii
List of Participants xxix
Inversion of a Class of Circular and Elliptical Radon TransformsG. Ambartsoumian and V. P. Krishnan 1
Free Jump Dynamics in ContinuumJ. Baranska and Y. Kozitsky 13
Instabilities in Kinetic Theory and Their Relationship to the ErgodicTheorem
J. Ben-Artzi 25
Some Recent Progress on Sharp Kato-type Smoothing EstimatesN. Bez and M. Sugimoto 41
Uniqueness of Photon Spheres in Static Vacuum Asymptotically FlatSpacetimes
C. Cederbaum 51
The L1 Liouville Property on Weighted ManifoldsN. Charalambous and Z. Lu 65
Some Remarks on Gevrey Well-Posedness for Degenerate SchrodingerEquations
M. Cicognani and M. Reissig 81
Asymptotics for Damped Evolution Operators with Mass-like TermsM. D’Abbicco 93
Singular Perturbations of Elliptic OperatorsE. Dyachenko and N. Tarkhanov 117
An Initial-Boundary Value Problem in a Strip for Two-DimensionalEquations of Zakharov–Kuznetsov Type
A. V. Faminskii 137
v

vi I: PDE, Differential Geometry, Radon Transform
Analysis of First Order Systems of Partial Differential EquationsY.-L. Fang and D. Vassiliev 163
An Embedding into an Orlicz Space for L11-Functions from Irregular Domains
P. Harjulehto and R. Hurri-Syrjanen 177
Qualitative Properties of Solution to Structurally Damped σ-EvolutionModels with Time Decreasing Coefficient in the Dissipation
M. Kainane Mezadek and M. Reissig 191
The Riemannian Penrose Inequality with Charge for Multiple Black HolesM. Khuri, G. Weinstein, and S. Yamada 219
Criteria for Invariance of Convex Sets for Linear Parabolic SystemsG. Kresin and V. Maz’ya 227
On an Extension of Harmonicity and HolomorphyJ. �Lawrynowicz, A. Niemczynowicz, M. Nowak-Kepczyk,
and L. M. Tovar Sanchez 243
Large Data Solutions for Critical Semilinear Weakly Hyperbolic EquationsS. Lucente 251
The Fredholm Property and Essential Spectra of Pseudodifferential Operatorson Non-Compact Manifolds and Limit Operators
V. Rabinovich 277
Overdetermined Transforms in Integral GeometryB. Rubin 291

ContentsII: Complex Analysis, Quasiconformal Mappings,
Complex Dynamics
Preface
David Shoikhet at SixtyMark Agranovsky, Mark Elin, and Lawrence Zalcman
Bibliography of David Shoikhet
Conference Program
List of Participants
Common Boundary Regular Fixed Points for Holomorphic Semigroups inStrongly Convex Domains
M. Abate and F. Bracci
Univalence Criteria Depending on Parameters and ApplicationsD. Aharonov and U. Elias
Hausdorff Operators in Hardy Spaces on Cartan Type Domains in Cn
L. Aizenberg, E. Liflyand, and A. Vidras
On the Expansive Property of Inner Functions in Weighted Hardy SpacesJ. A. Ball and V. Bolotnikov
Chordal Loewner EquationA. Del Monaco and P. Gumenyuk
The Borel-Nevanlinna LemmaP. C. Fenton
Normal Families of Discrete Open Mappings with Controlled p-ModuleA. Golberg, R. Salimov, and E. Sevost’yanov
Balls In The Triangular Ratio MetricS. Hokuni, R. Klen, Y. Li, and M. Vuorinen
Examples of Reconstruction of Homogeneous Isolated HypersurfaceSingularities from Their Milnor Algebras
A. V. Isaev
On Summation of the Taylor Series of the Function 1/(1 − z) by the ThetaSummation Method
V. Katsnelson
vii

viii II: Complex Analysis, Quasiconformal Mappings, Complex Dynamics
Strengthened Grunsky and Milin InequalitiesSamuel L. Krushkal
Quasiconformal Mappings with Replaced DilatationR. Kuhnau
Universality Limits Involving Orthogonal Polynomials on a Smooth ClosedContour
E. Levin and D. S. Lubinsky
Hele-Shaw Flow with a Time-Dependent Gap: the Schwarz Function Approachto the Interior Problem
K. Malaikah, T. V. Savina, and A. A. Nepomnyashchy
A Jordan Approach to Iteration Theory for Bounded Symmetric DomainsP. Mellon
Extreme Points Method and Univalent Harmonic MappingsY. A. Muhanna and S. Ponnusamy
A Weak Ergodic Theorem for Infinite Products of Holomorphic MappingsS. Reich and A. J. Zaslavski
Circle Packing and Interpolation in Fock SpacesD. Stevenson and K. Zhu
Briancon-Skoda Theorem for a Quotient RingA. Vidras and A. Yger
A Survey on Quasiconformal Functions with Application to the Case ofFunctions of a Hypercomplex Variable
F. Vlacci
On the Riemann-Hilbert Problem for the Beltrami EquationsA. Yefimushkin and V. Ryazanov

Preface
The Sixth International Conference on Complex Analysis and DynamicalSystems (CA&DS VI), sponsored by ORT Braude College (Karmiel, Israel),Bar-Ilan University (Ramat-Gan, Israel) and the University of Miami (Miami,FL, USA), took place at the Carlton Hotel, Nahariya, Israel, during May 19-24,2013. The conference was devoted to the interaction between various branches ofMathematical Analysis and was organized into three main parallel sessions:Complex Analysis, Partial Differential Equations and General Relativity.Altogether, 154 participants from 21 countries attended the Conference, which washeld in honor of Professor David Shoikhet’s sixtieth birthday. The Conference washeld in conjunction with the ISF (Israel Science Foundation) Workshop on IntegralTransforms and Spectral Theory in Analysis and Geometry.
These proceedings, which comprise two volumes, are the tangible record of theConference. Most of the papers collected here have been contributed by participantsin the Conference. In some cases, they have chosen to submit manuscripts whichdepart from the texts of their lectures. Several invited speakers who were unable toattend the Conference also contributed papers to these proceedings. All submissionshave been carefully refereed. The papers in this first volume are mainly devotedto Partial Differential Equations, Differential Geometry, and the Radon Transformwhile the papers in the second volume deal with Complex Analysis, QuasiconformalMappings, and Complex Dynamics. They testify to the continued vitality of theinterplay between classical and modern analysis.
We acknowledge with thanks the support provided for the Conference by theUS National Science Foundation, the Galilee Research Center for AppliedMathematics of ORT Braude College, the University of Miami, the GelbartResearch Institute for Mathematical Sciences of Bar-Ilan University, the EmmyNoether Research Institute for Mathematics of Bar-Ilan University, and the ISAAC–International Society for Analysis, its Applications and Computations. Finally, wethank Miriam Beller, who (as in previous volumes) served as Technical Editor.
The Editors
ix


David Shoikhet at Sixty
Mark Agranovsky, Mark Elin, and Lawrence Zalcman
David Shoikhet was born on April 26, 1953 in Odessa and attended thepublic schools in that city. In 1970, having completed his secondary educationat a school specializing in mathematics and physics, David entered KrasnoyarskState University (KSU), where just a few years earlier, Lev Aizenberg had foundedthe Department of Mathematical Analysis. In 1976, he graduated KSU with anM.Sc. thesis entitled “On Univalent Functions in Complex Spaces,” written underthe supervision of A.P. Yuzhakov.
For the next fourteen years, David held simultaneously a teaching positionin the Department of Higher Mathematics at the Krasnoyarsk Institute of Non-Ferrous Metals (KINM) and a research position at the Institute of Physics of theSiberian Branch of the Academy of Sciences of the USSR, from which he receivedhis Ph.D. in 1983, with a thesis entitled “On the Solvability of Operator Equationswith Analytic Non-linearities,” written under the direction of Yuzhakov and VictorKhatskevich. At KINM, he was promoted to the rank of Senior Lecturer in 1983 andto Associate Professor in 1985, and at the Institute of Physics to Senior ResearchFellow in 1985 and Senior Research Associate in 1988.
In 1990, the Shoikhets moved to Israel. Shortly thereafter, David joined thefaculty of the recently established ORT Braude College in Karmiel. From the verybeginning, David took the lead in raising the academic level of the nascent insti-tution, founding the Department of Mathematics and serving as its first Chairmanfrom 1992 to 2008. During this period, he played a pivotal role in the develop-ment of new courses and syllabi and the recruitment of strong researchers to theDepartment. At the same time, he became actively associated with the Technion,first as an Adjunct Senior Teaching Associate (1991-1996) and then as an AdjunctProfessor (1996-2008) and Visiting Professor (1999-2003). In 2002, David becamethe first regular faculty member to be promoted to the rank of (Full) Professor atORT Braude; and in 2008, he was appointed Vice President for Academic Affairsat ORT Braude, a position he filled with great distinction until 2014.
Shoikhet’s research, contained in over a hundred published papers and fiveresearch monographs, focusses on the interaction of nonlinear analysis and complexanalysis, dynamical systems and operator theory. In view of its sheer volume, adetailed account of this work is obviously out of the question. Accordingly, wecontent ourselves with simply mentioning a few of the high points.
Together with his long-time collaborators, Victor Khatskevich and SimeonReich, David initiated the systematic study and development of the theory ofnonlinear semigroups of holomorphic mappings in infinite dimensional Banach
xi

xii MARK AGRANOVSKY, MARK ELIN, AND LAWRENCE ZALCMAN
spaces [32], [34], [35], [36], [41].1 A lucky idea was to synthesize tools of infi-nite dimensional holomorphy and hyperbolic geometry with the spectral theory oflinear operators. In particular, Reich and Shoikhet showed [41] the differentiability(with respect to the parameter t) of a uniformly continuous semigroup {Ft}t≥0 ofholomorphic self-mappings of a domain D in a complex Banach space. It followsthat the infinitesimal generator f, defined by
f(x) = limt→∞
x− Ft(x)
t,
exists and is a holomorphic semi-complete vector field in D. This extends finite-dimensional results of Berkson-Porta [BP] and Abate [A] (which used compactnessarguments unavailable in the infinite dimensional context), as well as the classicalresults on linear operators due to Hille and Dunford.
In their pioneering work on the generation theory of semigroups of holomorphicmappings, Shoikhet & Co. proved the following striking result, which can be viewedas a Global Implicit Function Theorem: Let D be a bounded convex domain in areflexive Banach space X, and let Δ be the open unit ball in a Banach space Y .Suppose that F : Δ×D → D is holomorphic and for some λ0 ∈ Δ there is a fixedpoint x0 ∈ D of F (λ0, ·), i.e., x0 = F (λ0, x0). Then there is a holomorphic functionx(= x(λ)) : Δ → D such that x(λ) = F (λ, x(λ)) with x(λ0) = x0. Moreover, foreach λ ∈ Δ, the set of fixed points of F (λ, ·) is a holomorphic retract (complexanalytic submanifold) of D tangent to Ker(I −DxF (λ0, x0)). In particular, if x0 isan isolated fixed point of F (λ0, ·), then it is unique, and for each λ ∈ Δ there is aunique fixed point z(= z(λ)) ∈ D of F (λ, ·). This was first proved by Khatskevichand Shoikhet [21] for Hilbert spaces, using the Poincare hyperbolic metric, andwas then generalized by Khatskevich, Reich and Shoikhet [29] to reflexive Banachspaces, following a remark of Henri Cartan. In fact, they formulated and proved itin a more general setting for null points of semi-complete vector fields.
Another notable result, due to L.A. Harris, Reich and Shoikhet [47], is thefollowing extension of the Earle-Hamilton fixed point theorem [EH], as well asprevious results of Khatskevich and Shoikhet: If the numerical range of a holomor-phic mapping of a bounded convex domain in a (complex) Banach space lies strictlyinside the half-plane {z : Re z < 1}, then the mapping has a unique fixed point.
More recently, David has also obtained [95] a boundary version of the Earle-Hamilton theorem for the Hilbert ball: If F : B → B is a fixed point free mappingof the open unit ball B in (complex) Hilbert space such that F (B) is contained in ahorosphere in B, then the iterates Fn converge to a boundary point of B.
Shoikhet’s research employs a contemporary vision of functional analysis anddifferential equations together with hyperbolic geometry. It illustrates how a deepunderstanding of the use of semigroup theory may lead to new results even in theone-dimensional case. Here we may cite his contributions to geometric functiontheory, including the study of starlike and spirallike functions with respect to aboundary point. Perhaps the most interesting result in this direction establishes aone-to-one correspondence between wedges contained in the image of a starlike func-tion, backward flow invariant domains for the associated semigroup, and boundarynull points of the semigroup generator [76].
1Numbered references refer to the papers listed under the rubric “Papers” in the compre-hensive bibliography of his publications contained in this volume. All other references are to thebibliography at the end of this article.

DAVID SHOIKHET AT SIXTY xiii
David’s contributions to the teaching and the communication of mathematicshave been no less distinguished than his research. In Russia, he was twice (in 1986and 1988) a winner in the national competition for Excellence in Teaching andResearch run by the Ministry of Higher Education; and in Israel, he received anaward for Excellence in Teaching from the Technion in 1997. Testifying to hisextraordinary gift for envisioning the possible combined with organizational skillsof a very high order is the creation of the Galilee Research Center for Applied Math-ematics at ORT Braude. Founded by David in 2005, it has supported an amazinglyrich and varied program of visitors, collaborations and conferences on what canonly described as a shoestring budget. But the jewel in the crown of David’saccomplishments in this area is surely the brilliant series of international confer-ences on Complex Analysis and Dynamical Systems, which have taken place (al-most) every other year since 2001 and have done much to cement Israel’s role asan important center of research in complex analysis.
Nor has David’s unusual combination of creativity and organizational talentbeen limited to mathematics. He is surely one of the very few serious researchmathematicians to have had a successful career in . . . show business! Havingstudied music from early childhood, he plays the piano, accordion, clarinet andguitar. For a time, this hobby actually became a kind of second profession for him,parallel to mathematics. In the 1970’s, David worked evenings as a musician in amusical theater, where he met his wife Tania, who was employed as a singer there.Together, they decided to create their own “Theater of Song.” The group of singers,dancers and actors they brought together gained rapid popularity in the USSR andparticipated in a number of international festivals in Eastern Europe (Bulgaria,Czechoslovakia, East Germany, Poland, Yugoslavia and Romania), Georgia, andMexico. David himself wrote 13 musical scenarios for the Theater and 19 musicalprograms for television and received several awards and prizes as Artistic Director ofthe Theater of Song. He considers his most important accomplishment in this areahis jazz-rock opera “Intermezzo in 1943,” based on the book Notes from the Gallows,by the Czech journalist and anti-Nazi resistance leader Julius Fucık, for whichhe received a medal from the Ministry of Sciences and Culture of Czechoslovakiain 1989.
David and his lovely wife Tania, who continues her flourishing career as asinger and entertainer with appearances throughout Israel, live in the seaside com-munity of Nahariya, as do their son Ofer and two granddaughters. Nahariya is, onceagain, the venue for the conference Complex Analysis and Dynamical Systems VII(May 10-15, 2015). Just two weeks later, the date June 1, 2015 marks the SilverAnniversary (25 years) of the Shoikhets’ arrival in Israel. And so, along with wish-ing David a Happy Birthday, we take this opportunity also to wish the Shoikhetsa Happy Anniversary.

xiv MARK AGRANOVSKY, MARK ELIN, AND LAWRENCE ZALCMAN
References
[A] Marco Abate, The infinitesimal generators of semigroups of holomorphic maps, Ann. Mat.Pura Appl. (4) 161 (1992), 167–180, DOI 10.1007/BF01759637. MR1174816 (93i:32029)
[BP] Earl Berkson and Horacio Porta, Semigroups of analytic functions and composition opera-tors, Michigan Math. J. 25 (1978), no. 1, 101–115. MR0480965 (58 #1112)
[EH] Clifford J. Earle and Richard S. Hamilton, A fixed point theorem for holomorphic mappings,Global Analysis (Proc. Sympos. Pure Math., Vol. XVI, Berkeley, Calif., (1968), Amer. Math.Soc., Providence, R.I., 1970, pp. 61–65. MR0266009 (42 #918)
Department of Mathematics, Bar-Ilan University, Ramat-Gan 52900, Israel
E-mail address: [email protected]
Department of Mathematics, ORT Braude College, Karmiel 21101, Israel
E-mail address: mark [email protected]
Department of Mathematics, Bar-Ilan University, Ramat-Gan 52900, Israel
E-mail address: [email protected]

Bibliography of David Shoikhet
Books, Chapters in Books and Editorships
1. V. Khatskevich, D. Shoikhet, Differentiable Operators, Leningrad FinancialEconomical Inst., 1991, 150 pp.
2. V. Khatskevich, D. Shoikhet, Differentiable Operators and Nonlinear Equations,Birkhauser, Basel, 1994, 270 pp.
3. D. Shoikhet, Semigroups in Geometrical Function Theory, Kluwer Academic Pub-lishers, Dordrecht, 2001, 222 pp.
4. T. Kuczumow, S. Reich, D. Shoikhet, Fixed points of holomorphic mappings:a metric approach, in: Handbook of Metric Fixed Point Theory (W. A. Kirk andB. Sims, eds.), 437-516, Kluwer Academic Publishers, Dordrecht, 2001.
5. M. Elin, S. Reich, D. Shoikhet, Complex Dynamical Systems and the Geometry ofDomains in Banach Spaces, Dissertationes Math. (Rozprawy Mat.) 427, 2004,62 pp.
6. M. Agranovsky, L. Karp, D. Shoikhet, L. Zalcman (editors), Complex Analysisand Dynamical Systems, Contemporary Mathematics, vol. 364, Amer. Math. Soc.,Providence, RI, 2004.
7. M. Elin, D. Shoikhet, Semigroups of holomorphic mappings with boundary fixedpoints and spirallike mappings, in: Geometric Function Theory in Several Com-plex Variables, 82-117, World Sci. Publishing, River Edge, NJ, 2004.
8. M. Agranovsky, L. Karp, D. Shoikhet (editors), Complex Analysis and Dynami-cal Systems II, Contemporary Mathematics, vol. 382, Amer. Math. Soc., Provi-dence, RI, 2005.
9. S. Reich, D. Shoikhet, Fixed Points, Nonlinear Semigroups, and Geometry ofDomains in Banach Spaces, Imperial College Press, London, 2005, 372 pp.
10. F. Jacobzon, D. Shoikhet, D. Toledano-Kitai, Calculus in One Variable by Ac-tive Learning Approach, The Hebrew University Magness Press, 2008, 257 pp.(textbook).
11. M. Agranovsky, D. Bshouty, L. Karp, S. Reich, D. Shoikhet, L. Zalcman(editors), Complex Analysis and Dynamical Systems III, Contemporary Math-ematics, vol. 455, Amer. Math. Soc., Providence, RI, 2008.
12. M. Elin, D. Shoikhet, Linearization Models for Complex Dynamical Systems,Topics in Univalent Functions, Functional Equations and Semigroup Theory,Birkhauser, Basel, 2010, 265 pp.
xv

xvi BIBLIOGRAPHY OF DAVID SHOIKHET
13. M. Agranovsky, M. Ben-Artzi, G. Galloway, L. Karp, S. Reich, D. Shoikhet,G. Weinstein, L. Zalcman (editors), Complex Analysis and Dynamical SystemsIV: Part 1. Function Theory and Optimization, Contemporary Mathematics,vol. 553, Amer. Math. Soc., Providence, RI, 2011.
14. M. Agranovsky, M. Ben-Artzi, G. Galloway, L. Karp, S. Reich, D. Shoikhet,G. Weinstein, L. Zalcman (editors), Complex Analysis and Dynamical SystemsIV: Part 2. General Relativity, Geometry, and PDE, Contemporary Mathemat-ics, vol. 554, Amer. Math. Soc., Providence, RI, 2011.
15. M. Agranovsky, M. Ben-Artzi, G. Galloway, L. Karp, V. Maz’ya, S. Reich,D. Shoikhet, G. Weinstein, L. Zalcman (editors), Complex Analysis and Dynam-ical Systems V, Contemporary Mathematics, vol. 591, American MathematicalSociety, Providence, RI, 2013.
16. M. Elin, F. Jacobzon, M. Levenshtein, D. Shoikhet, The Schwarz lemma. Rigidityand dynamics, in: Harmonic and Complex Analysis and Applications, 135-230,Birkhauser/Springer, Cham, 2014.
Papers
1. D. Shoikhet, On some estimates of the radius of univalence of a holomorphic map-ping in Cn and an analogue of Caratheodory’s theorem, Holomorphic Functionsof Many Complex Variables, Institute of Physics, Siberian Branch, Academy ofSciences of the USSR, 1976, 139-148 (in Russian).
2. V. Bolotov, D. Shoikhet, On some estimate of the remainder term of Taylor’sformula for implicit function’s systems, Izv. Vyssh. Uchebn. Zaved. Mat. 8, 1980,3-7 (in Russian).
3. V. Khatskevich, D. Shoikhet, On some analogue of the Montel theorem for thecase of analytical operators in Banach spaces, Functional Analysis Theory ofOperators 15, 1980, 157-159 (in Russian).
4. V. Khatskevich, D. Shoikhet, On the extension and approximation of theresolvent of an analytic operator, VINITI (All-Union Institute of Scientific andTechnological Information) 5335, 1980, 15 pp. (in Russian).
5. D. Shoikhet, On some existence principles of solutions of analytic operator equa-tions, VINITI (All-Union Institute of Scientific and Technological Information)1853, 1980, 9 pp. (in Russian).
6. D. Shoikhet, Some properties of analytic operators in a Banach space and con-verse theorems, VINITI (All-Union Institute of Scientific and TechnologicalInformation) 1654, 1980, 15 pp. (in Russian).
7. D. Shoikhet, Some analytic isomorphisms in a strictly convex Banach spaceand Cartan’s theorem, Some Problems of Multi-Dimensional Complex Analysis,Institute of Physics, Siberian Branch, Academy of Sciences of the USSR, 1980,253-254 (in Russian).
8. D. Shoikhet, Some estimates for the domain of existence of p-valued inversionsof holomorphic mappings in C, Some Problems of Multidimensional ComplexAnalysis, Institute of Physics, Siberian Branch, Academy of Sciences of the USSR,1980, 257-260 (in Russian).

BIBLIOGRAPHY OF DAVID SHOIKHET xvii
9. V. Khatskevich, D. Shoikhet, Fixed points of analytic operators in a Banach spaceand their applications, Siberian Math. J. 25, 1984, 189-200; English translation:Siberian Math. J. 25, 1984, 156-166.
10. D. Shoikhet, On fixed points of analytic operators in a Banach space and someapplications, Theory of Functions and Functional Analysis and Applications 41,1984, 127-131.
11. D. Shoikhet, Some theorems on analytically varying implicit maps, Multidimen-sional Analysis, Institute of Physics, Siberian Branch, Academy of Sciences ofthe USSR, 1985, 264-267 (in Russian).
12. D. Shoikhet, A fixed point theorem for analytic operators in a Banach space,VINITI 11, 1986 (in Russian).
13. D. Shoikhet, Note on fixed points of holomorphic maps in a strictly convexBanach space, Complex Analysis and Mathematical Physics, Institute of Physics,Siberian Branch, Academy of Sciences of the USSR, 1987, 131 (in Russian).
14. D. Shoikhet, Note on fixed-points of nonexpansive analytic operators, ComplexAnalysis and Mathematical Physics, Institute of Physics, Siberian Branch, Acad-emy of Sciences of the USSR, 1988, 145-150 (in Russian).
15. D. Shoikhet, N. Tarkhanov, A remark on the probability of degeneration of amultidimensional branching Galton-Watson process, Serdica 15, 1989, 171-173.
16. T. Azizov, V. Khatskevich, D. Shoikhet, On the number of fixed points of aholomorphism, Siberian Math. J. 31, 1990, 192-195; English translation: SiberianMath. J. 31, 1990, 1040-1042.
17. D. Shoikhet, On singular bifurcation points of analytic operators, VINITI 15,1990 (in Russian).
18. D. Shoikhet, Some properties of Fredholm mappings of Banach analytic mani-folds, Dokl. Akad. Nauk SSSR 319, 1991, 1336-1341; English translation: SovietMath. Dokl. 44, 1991, 358-363.
19. D. Shoikhet, Strong Browder’s fixed points principle for Fredholm mappings,Complex Analysis, Krasnoyarsk State University, 1991, 6 pp. (in Russian).
20. D. Shoikhet, Some properties of Fredholm operators in Banach analytic mani-folds, Integral Equations Operator Theory 16, 1993, 430-451.
21. V. Khatskevich, D. Shoikhet, One version of implicit function theorem for holo-morphic mappings, C. R. Acad. Sci. Paris Ser. I Math. 319, 1994, 599-604.
22. V. Khatskevich, D. Shoikhet, Stationary points of one-parameter semigroupswith holomorphic generators, Funct. Differential Equations Israel Sem. 2, 1995,91-110.
23. V. Khatskevich, S. Reich, D. Shoikhet, Fixed point theorems for holomorphicmappings and operator theory in indefinite metric spaces, Integral EquationsOperator Theory 22, 1995, 305-316.
24. V. Khatskevich, D. Shoikhet, Null-point sets of holomorphic generators of one-parameter semigroups, Dynam. Systems Appl. 4, 1995, 611-629.

xviii BIBLIOGRAPHY OF DAVID SHOIKHET
25. V. Khatskevich, S. Reich, D. Shoikhet, Ergodic type theorems for nonlinearsemigroups with holomorphic generators, in: Recent Developments in EvolutionEquations, Pitman Research Notes in Math. 324, 1995, 191-200.
26. V. Khatskevich, S. Reich, D. Shoikhet, Fixed points of holomorphic mappings andsemigroups in Banach spaces: regularity and uniqueness, in: Interaction betweenFunctional Analysis, Harmonic Analysis and Probability, Marcel Dekker, NewYork, 1996, 249-254.
27. V. Khatskevich, S. Reich, D. Shoikhet, Null points of holomorphic generatorsin the Hilbert ball, in: Recent Advances in Metric Fixed Point Theory, Seville,Spain, 1996, 59-72.
28. L. Aizenberg, S. Reich, D. Shoikhet, One-sided estimates for the existence of nullpoints of holomorphic mappings in Banach spaces, J. Math. Anal. Appl. 203,1996, 38-54.
29. V. Khatskevich, S. Reich, D. Shoikhet, A global implicit function theorem andfixed point theorems for holomorphic mappings and semigroups, Dokl. Akad.Nauk 347, 1996, 743-745.
30. V. Khatskevich, S. Reich, D. Shoikhet, Global implicit function and fixed pointtheorems for holomorphic mappings and semigroups, Complex Variables TheoryAppl. 28, 1996, 347-356.
31. S. Reich, D. Shoikhet, The existence of resolvents of holomorphic generators inBanach spaces. Theory and applications of nonlinear operators of accretive andmonotone type, Lecture Notes in Pure and Appl. Math., Dekker, New York,1996, 251-258.
32. S. Reich, D. Shoikhet, Generation theory for semigroups of holomorphic mappingsin Banach Spaces, Abstr. Appl. Anal. 1, 1996, 1-44.
33. V. Khatskevich, S. Reich, D. Shoikhet, Ergodic methods for the construction ofholomorphic retractions, Oper. Theory Adv. Appl. 98, Birkhauser, Basel, 1997,145-152.
34. V. Khatskevich, S. Reich, D. Shoikhet, Semi-complete vector fields on homoge-neous balls in Banach spaces, Ann. Univ. Mariae Curie-Sk�lodowska, Sect. A51,1997, 143-148.
35. V. Khatskevich, S. Reich, D. Shoikhet, Complex dynamical systems on boundedsymmetric domains, Electron. J. Differential Equations 19, 1997, 9 pp.
36. S. Reich, D. Shoikhet, Semigroups and generators on convex domains with thehyperbolic metric, Atti Accad. Naz. Lincei Cl. Sci. Fis Mat. Natur. Rend. Lincei(9) 8, 1997, 231-250.
37. S. Reich, D. Shoikhet, The Denjoy-Wolff theorem, Ann. Univ. Mariae Curie-Sk�lodowska, Sect. A51, 1997, 219-240.
38. V. Khatskevich, S. Reich, D. Shoikhet, Asymptotic behavior of solutions of evo-lution equations and the construction of holomorphic retractions, Math. Nachr.189, 1998, 171-178.
39. S. Reich, D. Shoikhet, Averages of holomorphic mappings and holomorphicretractions on convex hyperbolic domains, Studia Math. 130, 1998, 231-244.

BIBLIOGRAPHY OF DAVID SHOIKHET xix
40. S. Reich, D. Shoikhet, A characterization of holomorphic generators on theCartesian product of Hilbert balls, Taiwanese J. Math. 2, 1998, 383-396.
41. S. Reich, D. Shoikhet, Metric domains, holomorphic mappings and nonlinearsemigroup, Abstr. Appl. Anal. 3, 1998, 203-228.
42. D. Aharonov, M. Elin, S. Reich, D. Shoikhet, Parametric representations of semi-complete vector fields on the unit balls in Cn and in Hilbert space, Atti Accad.Naz. Lincei Cl. Sci. Fis. Mat. Natur. Rend. Lincei (9) Mat. Appl. 10, 1999,229-253.
43. D. Aharonov, S. Reich, D. Shoikhet, Flow invariance conditions for holomorphicmappings in Banach spaces, Math. Proc. R. Ir. Acad. 99A, 1999, 93-104.
44. S. Reich, D. Shoikhet, An interior flow invariance condition for nonlinear semi-groups on convex domains in Banach spaces, Numer. Funct. Anal. Optim. 20,1999, 333-339.
45. M. Elin, S. Reich, D. Shoikhet, Asymptotic behavior of semigroups of holomor-phic mappings, Progr. Nonlinear Differential Equations Appl. 42, Birkhauser,Basel, 2000, 249-258.
46. M. Elin, S. Reich, D. Shoikhet, Holomorphically accretive mappings and spiral-shaped functions of proper contractions, Nonlinear Anal. Forum 5, 2000, 149-161.
47. L.A. Harris, S. Reich, D. Shoikhet, Dissipative holomorphic functions, Blochradii, and the Schwarz lemma, J. Anal. Math. 82, 2000, 221-232.
48. M. Elin, S. Reich, D. Shoikhet, A semigroup approach to the geometry of domainsin complex Banach spaces, Nonlinear Anal. 47, 2001, 3271-3280.
49. M. Elin, S. Reich, D. Shoikhet, Dynamics of inequalities in geometric functiontheory, J. Inequal. Appl. 6, 2001, 651-664.
50. M. Elin, D. Shoikhet, Dynamic extension of the Julia–Wolff–CaratheodoryTheorem, Dynam. Systems Appl. 10, 2001, 421-437.
51. V. Khatskevich, S. Reich, D. Shoikhet, Schroder’s functional equation and theKoenigs embedding property, Nonlinear Anal. 47, 2001, 3977-3988.
52. V. Khatskevich, S. Reich, D. Shoikhet, One-parameter semigroups of fractional-linear transformations, Oper. Theory Adv. Appl. 123, Birkhauser, Basel, 2001,401-414.
53. T. Kuczumow, S. Reich, D. Shoikhet, The existence and non-existence of commonfixed points for commuting families of holomorphic mappings, Nonlinear Anal.43, 2001, 45-59.
54. L. Aizenberg, D. Shoikhet, Boundary behavior of semigroups of holomorphicmappings on the unit ball in Cn, Complex Var. Theory Appl. 47, 2002, 109-121.
55. L. Aizenberg, D. Shoikhet, A remark on uniform Bloch radii and Bohr phenomenain Cn, Multidimensional Complex Analysis, 2002, 5-17.
56. S. Reich, D. Shoikhet, Semigroups of Holomorphic Mappings, in: Math. Encyclo-pedia, Supplement, Kluwer Academic Publishers, 2002, 354-358.

xx BIBLIOGRAPHY OF DAVID SHOIKHET
57. S. Reich, D. Shoikhet, The Denjoy-Wolff theorem, in: Math. Encyclopedia, Sup-plement, Kluwer Academic Publishers, 2002, 121-123.
58. D. Shoikhet, The Julia-Wolff-Caratheodory theorem, in: Math. Encyclopedia,Supplement, Kluwer Academic Publishers, 2002, 222-224.
59. Y. Alber, S. Reich, D. Shoikhet, Iterative approximations of null points of uni-formly accretive operators with estimates of the convergence rate, Commun.Appl. Anal. 6, 2002, 89-104.
60. M. Elin, L. Harris, S. Reich, D. Shoikhet, Evolution equations and geometricfunction theory in J∗-algebras, J. Nonlinear Convex Anal. 3, 2002, 81-121.
61. M. Elin, S. Reich, D. Shoikhet, Asymptotic behavior of semigroups of ρ-non-expansive and holomorphic mappings on the Hilbert Ball, Ann. Mat. Pura Appl.(4) 181, 2002, 501-526.
62. M. Elin, D. Shoikhet, Univalent functions of proper contractions spirallike withrespect to a boundary point, Multidimensional Complex Analysis, 2002, 28-36.
63. M. Elin, V. Goryainov, S. Reich, D. Shoikhet, Fractional iteration and functionalequations for functions analytic in the unit disk, Comput. Methods Funct. Theory2, 2002, 353-366.
64. D. Aharonov, M. Elin, D. Shoikhet, Spiral-like functions with respect to a bound-ary point, J. Math. Anal. Appl. 280, 2003, 17-29.
65. D. Shoikhet, Representations of holomorphic generators and distortion theoremsfor spirallike functions with respect to a boundary point, Int. J. Pure Appl. Math.5, 2003, 335-361.
66. V. Khatskevich, S. Reich, D. Shoikhet, Abel-Schroder equations for linear frac-tional mappings and the Koenigs embedding problem, Acta Sci. Math. (Szeged),69, 2003, 67-98.
67. M. Elin, D. Shoikhet, V. Volkovich, Semigroups of holomorphic mappings onthe unit disk with a boundary fixed point, Int. J. Pure Appl. Math. 12, 2004,427-453.
68. M. Elin, A. Goldvard, S. Reich, D. Shoikhet, Dynamics of spirallike functions,Complex Analysis and Dynamical Systems, Contemp. Math. 364, 2004, 41-57.
69. L. Aizenberg, M. Elin, D. Shoikhet, On the Rogosinski radius for holomorphicmappings and some of its applications, Studia Math. 168, 2005, 147-158.
70. M. Elin, D. Shoikhet, Angle distortion theorems for starlike and spirallike func-tions with respect to a boundary point, Int. J. Math. Math. Sci. Art. ID 81615,2006, 13 pp.
71. M. Levenshtein, S. Reich, D. Shoikhet, An application of the resolvent methodto rigidity theory for holomorphic mappings, J. Nonlinear Convex Anal. 8, 2007,99-103.
72. M. Elin, M. Levenshtein, D. Shoikhet, R. Tauraso, Rigidity of holomorphic gener-ators and one-parameter semigroups, Dynam. Systems Appl. 16, 2007, 251-266.
73. M. Elin, M. Levenshtein, S. Reich, D. Shoikhet, Rigidity results for holomorphicmappings on the unit disk, Complex and Harmonic Analysis, 2007, 93-109.

BIBLIOGRAPHY OF DAVID SHOIKHET xxi
74. D. Shoikhet, Linearizing models of Koenigs type and the asymptotic behavior ofone-parameter semigroups, Sovrem. Mat. Fundam. Napravl. 21, 2007, 149-166;translation in J. Math. Sci. (N. Y.) 153, 2008, 629-648.
75. M. Elin, D. Shoikhet, L. Zalcman, Controlled approximation for some classes ofholomorphic functions, Complex Analysis and Dynamical Systems III, Contemp.Math. 455, 2008, 63-92.
76. M. Elin, D. Shoikhet, L. Zalcman, A flower structure of backward flow invariantdomains for semigroups, Ann. Acad. Sci. Fenn. Math. 33, 2008, 3-34.
77. M. Elin, D. Shoikhet, L. Zalcman, A flower structure of backward flow invariantdomains for semigroups, C. R. Math. Acad. Sci. Paris 346, 2008, 293-296.
78. M. Elin, S. Reich, D. Shoikhet, A Julia-Caratheodory theorem for hyperbolicallymonotone mappings in the Hilbert ball, Israel J. Math. 164, 2008, 397-411.
79. M. Elin, S. Reich, D. Shoikhet, F. Yacobzon, Asymptotic behavior of one-parameter semigroups and rigidity of holomorphic generators, Complex Anal.Oper. Theory 2, 2008, 55-86.
80. D. Shoikhet, Another look at the Burns-Krantz theorem, J. Anal. Math. 105,2008, 19-42.
81. M. Elin, M. Levenshtein, S. Reich, D. Shoikhet, Two rigidity theorems for holo-morphic generators of continuous semigroups, J. Nonlinear Convex Anal. 9, 2008,59-64.
82. M. Elin, D. Shoikhet, F. Yacobzon, Linearization models for parabolic type semi-groups, J. Nonlinear Convex Anal. 9, 2008, 205-214.
83. M. Elin, M. Levenshtein, S. Reich, D. Shoikhet, A rigidity theorem for holo-morphic generators on the Hilbert ball, Proc. Amer. Math. Soc. 136, 2008,4313-4320.
84. M. Elin, M. Levenshtein, S. Reich, D. Shoikhet, Commuting semigroups of holo-morphic mappings, Math. Scand. 103, 2008, 295-319.
85. A. Goldvard, S. Reich, D. Shoikhet, Asymptotic representations of star-like func-tions via continuous semigroups of holomorphic mappings, Math. Proc. R. Ir.Acad. 108, 2008, 177-197.
86. M. Elin, S. Reich, D. Shoikhet, F. Yacobzon, Rates of convergence of one-parameter semigroups with boundary Denjoy-Wolff fixed points, Fixed PointTheory and Its Applications, Yokohama Publishers, Yokohama, 2008, 43–58.
87. D. Alpay, S. Reich, D. Shoikhet, Rigidity theorems, boundary interpolation andreproducing kernels for generalized Schur functions, Comput. Methods Funct.Theory 9, 2009, 347-364.
88. F. Jacobzon, S. Reich, D. Shoikhet, Linear fractional mappings: invariant sets,semigroups and commutativity, J. Fixed Point Theory Appl. 5, 2009, 63-91.
89. D. Alpay, A. Dijksma, H. Langer, S. Reich, D. Shoikhet, Boundary interpolationand rigidity for generalized Nevanlinna functions, Math. Nachr. 283, 2010, 335-364.

xxii BIBLIOGRAPHY OF DAVID SHOIKHET
90. M. Elin, D. Khavinson, S. Reich, D. Shoikhet, Linearization models for parabolicdynamical systems via Abel’s functional equations, Ann. Acad. Sci. Fenn. Math.35, 2010, 439-472.
91. F. Bracci, M. Elin, D. Shoikhet, Normal forms and linearization of holomorphicdilation type semigroups in several variables, J. Nonlinear Convex Anal. 12, 2011,143-154.
92. M. Elin, D. Shoikhet, F. Yacobzon, A distortion theorem for functions convex inone direction, Complex Anal. Oper. Theory 5, 2011, 751-758.
93. M. Elin, D. Shoikhet, Boundary behaviour and rigidity of semigroups of holo-morphic mappings, Anal. Math. Phys. 1, 2011, 241-258.
94. M. Elin, D. Shoikhet, N. Tarkhanov, Separation of boundary singularities forholomorphic generators, Ann. Mat. Pura Appl. (4) 190, 2011, 595-618.
95. Y. Kondratiev, Y. Kozitsky, D. Shoikhet, Dynamical systems on sets of holomor-phic functions, Complex Analysis and Dynamical Systems IV, Contemp. Math.553, 2011, 139-153.
96. D. Shoikhet, A generalized version of the Earle–Hamilton fixed point theorem forthe Hilbert ball, J. Math. Res. 4, 2012, 45-56.
97. M. Elin, L. A. Harris, S. Reich, D. Shoikhet, Dynamics of self-maps of the unitdisk, Appendix H, in: D. S. Alexander, F. Iavernaro, A. Rosa, Early Days inComplex Dynamics, American Math. Soc., London Math. Soc., 2012, 307-312.
98. M. Elin, M. Levenshtein, S. Reich, D. Shoikhet, Some inequalities for the horo-sphere function and hyperbolically nonexpansive mappings on the Hilbert ball,Sovrem. Mat. Fundam. Napravl. 45, 2012, 75-93; translation in J. Math. Sci.(N. Y.) 201, 2014, 595-613.
99. V. Bolotnikov, M. Elin, D. Shoikhet, Inequalities for angular derivatives andboundary interpolation, Anal. Math. Phys. 3, 2013, 63-96.
100. S Reich, D. Shoikhet, J. Zemanek, Ergodicity, numerical range and fixed pointsof holomorphic mappings, J. Anal. Math. 119, 2013, 275-303.
101. Y. Kozitsky, D. Shoikhet, J. Zemanek, Power convergence of Abel averages, Arch.Math. (Basel) 100, 2013, 539-549.
102. F. Bracci, D. Shoikhet, Boundary behavior of infinitesimal generators in the unitball, Trans. Amer. Math. Soc. 366, 2014, 1119-1140.
103. F. Bracci, M. Elin, D. Shoikhet, Growth estimates for pseudo-dissipative holo-morphic maps in Banach spaces, J. Nonlinear Convex Anal. 15, 2014, 191-198.
104. A. Frolova, M. Levenshtein, D. Shoikhet, A. Vasil’ev, Boundary distortion esti-mates for holomorphic maps, Complex Anal. Oper. Theory 8, 2014, 1129-1149.
105. F. Bracci, Y. Kozitsky, D. Shoikhet, Abel averages and holomorphically pseudo-contractive maps in Banach spaces, J. Math. Anal. Appl. 423, 2015, no. 2, 1580-1593.

Conference Program
May 19 – May 24, 2011
Sunday - May 19, 2013
15:00 - 16:45 Informal mathematical discussions
17:15 - 19:00 Informal mathematical discussions
Monday - May 20, 2013
10:50 - 11:35 Plenary Lecture 1P. Kuchment, The nodal count mystery
Morning Session 1: Integral Transforms and Spectral Theory12:00 - 12:45 A. Iosevich, Intersections of sets, group actions and Erdos-Falconer
problemsMorning Session 2: Complex Analysis12:00 - 12:30 G. Gentili, Regular functions of a quaternionic variable and
polynomials orthogonal complex structures12:30 - 13:00 C. de Fabritiis, Hp spaces of s-regular functionsMorning Session 3: Partial Differential Equations12:00 - 12:30 S. Gindikin, Complex analysis and separation of spectrums for
ultrahyperbolic differential operators12:30 - 13:00 M. Ruzhansky, Quantization on Lie groupsMorning Session 4: Geometric Function Theory12:00 - 12:30 D. Aharonov, A univalence criterion and its application to the
error function12:30 - 13:00 V. Dubinin, A new version of circular symmetrization with
applications to the geometric function theory14:30 - 15:15 Plenary Lecture 2
M. Abate, Wolff-Denjoy theorems in non-smooth convex domains15:20 - 16:05 Plenary Lecture 3
M. Sugimoto, Recent progress in smoothing estimates for Schrodingerequations
Afternoon Session 1: Integral Transforms and Spectral Theory16:30 - 17:00 A. Montes-Rodriguez, The Hilbert transform, Perron-Frobenius
operators and the Klein-Gordon equation17:00 - 17:30 G. Ambartsoumian, Reconstructing a function from its V-line
averages in a disc17:40 - 18:10 L. Kunyansky, Photo- and thermo- acoustic tomography in the
presence of reflecting boundaries18:10 - 18:40 B. Rubin, Weighted norm inequalities for Radon transforms
xxiii

xxiv CONFERENCE PROGRAM
Afternoon Session 2: Complex Analysis16:30 - 17:00 V. Katsnelson, Stieltjes function and Hurwitz stable entire functions17:00 - 17:30 G. Kresin, Sharp real-part theorems for derivatives of analytic
functions17:40 - 18:10 S. Kanas, Generalized typically-real functions18:10 - 18:40 D. Lubinsky, Extremal problems for polynomials generate extremal
problems for Paley-Wiener spaceAfternoon Session 3: Partial Differential Equations16:30 - 17:00 J. Ben-Artzi, Linear instability of the relativistic Vlasov-Maxwell
system17:00 - 17:30 A. Faminskii, On large time decay of solutions to equations of
Korteweg-de Vries type17:40 - 18:10 J. Delgado, Schatten classes and r-nuclearity on compact Lie groupsAfternoon Session 4: Geometric Function Theory16:30 - 17:00 D. Bshouty, Affine modulus and Nitsche type problem17:00 - 17:30 K. Dyakonov, A reverse Schwarz-Pick inequality17:40 - 18:10 A. Golberg, Singularities of mappings with integrally bounded
distortions18:10 - 18:40 E. Sevostyanov, On injectivity radius of local ring Q-homeomorphisms
Tuesday - May 21, 2013
09:00 - 09:50 Plenary Lecture 4A. Olevskii, High-dim sampling and interpolation
09:50 - 10:35 Plenary Lecture 5I. Mitrea, Harmonic analytic and geometric measure theoreticmethods in several complex variables
Morning Session 1: Integral Transforms and Spectral TheoryChairman: A. Iosevich
11:05 - 11:50 A. Koldobsky, Stability and separation in volume comparisonproblems
12:15 - 12:45 A. Tumanov, Minimizing discrete energy on the sphere12:45 - 13:15 D. Ryabogin, On the continual Rubik’s cubeAfternoon Session 1: Integral Transforms and Spectral Theory
Chairman: F. Gonzalez14:45 - 15:15 A. Sergeev, Quantization of universal Teichmuller space15:15 - 15:45 F. Gonzalez, Multitemporal wave equations and mean value operators16:00 - 16:30 N. Zobin, Quantization of Whitney problems16:30 - 17:00 S. Tikhonov, Wiener type theorems on Fourier series with positive
coefficients17:30 - 18:00 E. Liflyand, Fourier transform versus Hilbert transform18:00 - 18:30 Y. Salman, Global extendibility phenomenon for the Euler-Poisson-
Darboux EquationMorning Session 2: Analysis and Dynamics in Banach Spaces
Chairman: M. Abate11:05 - 11:35 L.A. Harris, Lagrange polynomials, reproducing kernels and Markov’s
polynomial inequality11:35 - 12:05 T. Kuczumow, The common fixed point set of commuting
holomorphic mappings in Cartesian products of Banach spaces

CONFERENCE PROGRAM xxv
12:15 - 12:45 P. Mellon, Jordan Theory and Holomorphic Dynamics12:45 - 13:15 M. Budzynska, The Denjoy-Wolff Theorem in complex Banach spacesAfternoon Session 2: Complex Analysis and Applied Dynamics
Chairman: P. Mellon14:45 - 15:15 F. Bracci, The Julia-Wolff-Caratheodory theorem(s) in higher
dimensions for mappings and infinitesimal generators15:15 - 15:45 A. Isaev, Explicit reconstruction of homogeneous isolated
hypersurface singularities from their Milnor algebrasChairman: G. Gentili
16:00 - 16:30 J. Kozicki, Stochastic dynamics of a continuum particle system withdispersal and competition: micro- and meso-scopic description
16:30 - 17:00 Y. Gliklikh, Dynamical systems with stochastic perturbations interms of mean derivatives
17:30 - 18:00 V. Golubyatnikov, Non-uniqueness of cycles in some simple nonlinear dynamical systems
Morning Session 3: Partial Differential EquationsChairman: M. Ruzhansky
11:05 - 11:35 A. Shishkov, Localization of singularities of solutions to semi-linearparabolic and elliptic equations with degenerate absorption potential
11:35 - 12:05 M. Gobbino, Optimal decay estimates for semi-linear parabolic andhyperbolic equations
12:15 - 12:45 S. Lucente, Nonlinear wave equations with variable coefficients12:45 - 13:15 M. D’Abbicco, Effectiveness of a scale-invariant damping for
semilinear wavesAfternoon Session 3: Partial Differential Equations
Chairman: A. Faminskii14:45 - 15:15 M. Ghisi, The singular perturbation problem for Kirchhoff equation:
sharp decay-error estimates15:15 - 15:45 E. Malinnikova, Logarithmic convexity for discrete harmonic
functions16:00 - 16:30 G. Taglialatela, Weakly hyperbolic equations with nonanalytic
coefficientsMorning Session 4: Functional and Complex Analysis
Chairman: R. Hurri-Syrjanen11:05 - 11:35 A. Ukhlov, Conformal composition operators and Brennan’s
conjecture11:35 - 12:05 V. Gol’dshtein, Conformal weights and embedding operators12:15 - 12:45 S. Vodopyanov, On mappings with bounded codistortion12:45 - 13:15 M. Bekker, Automorphic-invariant isometric operators and their
unitary extensionsAfternoon Session 4: Multi-dimensional Complex Analysis
Chairman: M. Budzynska14:45 - 15:15 A. Vidras, Briancon-Skoda theorem for quotient ring15:55 - 15:45 P. Liczberski, Domains with conically accessible boundary in multi-
dimensional caseChairman: A. Sergeev
16:00 - 16:30 V. Zakharyuta, Internal capacity characteristics of domains inseveral complex variables

xxvi CONFERENCE PROGRAM
16:30 - 17:00 L. Aizenberg, The separation of singularities of holomorphicfunctions
17:30 - 18:00 S. Myslivetz, Holomorphic extension of functions along the finitefamilies of complex lines in a ball of Cn
Wednesday - May 22, 2013
09:00 - 09:45 Plenary Lecture 6Vincent Moncrief, Lightcone estimates for spacetime curvature ingeneral relativity
09:50 - 10:35 Plenary Lecture 7Simeon Reich, Problems and results in nonlinear analysis: An update
Morning Session 1: Integral Transforms and Spectral TheoryChairman: A. Olevskii
11:10 - 11:55 M. Zaidenberg, Automorphism groups of affine varieties and theirLie algebras
12:20 - 12:50 M. Sodin, On the number of components of zero sets of smoothrandom functions of several real variables
12:50 - 13:20 Y. Yomdin, Generalized Remez inequality for (s;p)-valent functionsAfternoon Session 1: Integral Transforms and Spectral Theory
Chairman: M. Zaidenberg14:45 - 15:15 N. Lev, Multi-tiling and Riesz bases15:15 - 15:45 D. Batenkov, Accurate Fourier reconstruction of piecewise-smooth
functions16:15 - 16:45 L. Nguyen, Spherical mean transform from a PDE point of view16:45 - 17:15 E. Grinberg, Integral transforms defined by intrinsic geometry of
Riemannian manifoldsMorning Session 2: Complex Analysis
Chairman: K. Dyakonov11:10 - 11:40 S. Krushkal, Strengthened Grunsky and Milin inequalities11:40 - 12:10 A. Solynin, Minimization of area: Iceberg-type problems in the plane12:20 - 12:50 J. Globevnik, Boundary values of holomorphic functions in terms of
the argument principle12:50 - 13:20 J. Dziok, Analytic functions associated with functions of bounded
variationAfternoon Session 2: Complex Analysis
Chairman: M. Zaidenberg14:45 - 15:15 M.D. Contreras, Boundary behavior of the iterates of a self-map of
the unit disk15:15 - 15:45 V. Bolotnikov, Shift-invariant subspaces, inner functions and related
linear systems: the weighted Bergman space settingMorning Session 3: Partial Differential Equations
Chairman: M. Gobbino11:10 - 11:40 M. Reissig, Semi-linear structural damped waves11:40 - 12:10 M. Cicognani, Well-posedness for degenerate Schrodinger equations12:20 - 12:50 E.S. Titi, On the loss of regularity for the three-dimensional Euler
equations12:50 - 13:20 Y. Guo, Persistency of analyticity for quasi-linear wave equations:
an energy- like approach

CONFERENCE PROGRAM xxvii
Afternoon Session 3: Partial Differential EquationsChairman: E. Titi
14:45 - 15:15 O. Kelis, On solvability of multi-order parabolic systemsMorning Session 4: General Relativity
Chairman: G. Galloway11:10 - 11:40 F. Schwartz, Geometric inequalities for hypersurfaces11:40 - 12:10 N. Charalambous, The essential spectrum of the Laplacian on
complete manifolds12:20 - 12:50 D. Fajman, Nonlinear stability for the Einstein-Vlasov system12:50 - 13:20 T. Oliynyk, Dynamical compact bodies in general relativityAfternoon Session 3: General Relativity
Chairman: F. Schwartz14:45 - 15:15 C. Cederbaum, Uniqueness of photon spheres in static spacetimes15:15 - 15:45 K. Moore, Evolving hypersurfaces by their inverse null mean
curvature16:45 - 17:15 G. Weinstein, The Penrose Inequality with charge
Thursday - May 23, 201309:00 - 09:45 Plenary Lecture 8
P. Topping, Instantaneously Complete Ricci flows09:50 - 10:35 Plenary Lecture 9
V. Maz’ya, Bounds for eigenfunctions of the Laplacian onnoncompact Riemannian manifolds
Morning Session 1: Integral Transforms and Spectral TheoryChairman: P. Kuchment
11:00 - 11:45 Z. Rudnick, Nodal intersections12:10 - 12:40 V. Gichev, Some metric properties of polynomials on compact
homogeneous spaces12:40 - 13:10 K. Taylor, Intersections of fractal setsMorning Session 2: Dynamics and Lowner Theory
Chairman: F. Bracci11:10 - 11:30 S. Diaz-Madrigal, Local and global aspects in Loewner theory11:30 - 12:00 P. Gumenyuk, Boundary behaviour of one-parameter semigroups
and evolution families12:10 - 12:40 G. Ivanov, Non-exploding analytic diffusions in the unit diskMorning Session 3: Free Boundary Problems
Chairman: A. Solynin11:00 - 11:30 D. Khavinson, An overdetermined boundary value problem11:30 - 12:00 A. Klein, Viscous fingering in the evaporation fronts of thin liquid
films12:10 - 12:40 T. Savina, On some generalized Hele-Shaw flows12:40 - 13:10 R. Hurri-Syrjanen, On fractional Poincare inequalitiesMorning Session 4: General Relativity
Chairman: G. Weinstein11:00 - 11:45 J. Solomon, The space of positive Lagrangian submanifolds12:10 - 12:55 E. Milman, Sharp isoperimetric inequalities and model spaces for
the Curvature-Dimension-Diameter condition

xxviii CONFERENCE PROGRAM
Friday - May 24, 2013
09:10 - 09:55 Plenary Lecture 10D. Vassiliev, Spectral theory of first order elliptic systems
10:30 - 11:15 Plenary Lecture 11A. Vasiliev, Stochastic Loewner-Kufarev evolution with a randomHerglotz field

List of Participants
M. AbateUniversita di Pisa, Italy
B. AbramovitzORT Braude College, Israel
M. AgranovskyBar-Ilan University, Israel
D. AharonovTechnion – Israel Institute ofTechnology, Israel
L. AizenbergBar-Ilan University, Israel
G. AmbartsoumianThe University of Texas at Arlington,USA
D. BatenkovWeizmann Institute of Science, Israel
M. BekkerUniversity of Pittsburgh, USA
J. Ben-ArtziCambridge University, UK
M. Ben-ArtziHebrew University, Israel
C. BeneteauUniversity of South Florida, USA
M. BerezinaORT Braude College, Israel
M. BermanORT Braude College, Israel
V. BolotnikovCollege of William & Mary, USA
M. BozejkoUniwersytet Wroc�lawski, Poland
F. BracciUniversita di Roma “Tor Vergata”,Italy
D. BshoutyThe Technion – Israel Institute ofTechnology, Israel
M. BudzynskaUniwersytet Marii Curie-Sk�lodowskiejw Lublinie, Poland
C. CederbaumUniversity of Tubingen, Germany
N. CharalambousUniversity of Cyprus, Cyprus
Z. ChesnokovORT Braude College, Israel
M. D. ContrerasUniversidad de Sevilla, Spain
M. D’AbbiccoUniversita degli Studi di Brescia, Italy
C. de FabritiisUniversita Politecnica delle Marche ViaBrecce, Italy
J. DelgadoImperial College London, UK
S. Dıaz-MadrigalUniversidad de Sevilla, Spain
V. DubininRussian Academy of Sciences, Russia
K. DyakonovUniversitat de Barcelona, Spain
xxix

xxx PARTICIPANTS
J. DziokUniwersytet Rzeszowski, Poland
M. ElinORT Braude College, Israel
D. FajmanUniversitat Wien, Austria
A. FaminskiiPeoples’ Friendship University of Russia
M. FleemanUniversity of South Florida, USA
A. FrolovaUniversitetet i Bergen, Norway
G. GallowayUniversity of Miami, USA
G. GentiliUniversita di Firenze, Italy
M. GherguUniversity College Dublin, Ireland
M. GhisiUniversita di Pisa, Italy
V. GichevSobolev Institute of Mathematics,Russia
S. GindikinRutgers University, USA
Y. GliklikhVoronezh State University, Russia
V. GlizerORT Braude College, Israel
J. GlobevnikUniverzi v Ljubljani, Slovenia
M. GobbinoUniversita di Pisa, Italy
A. GolbergHolon Institute of Technology, Israel
V. Gol’dshteinBen Gurion University of the Negev,Israel
V.P. GolubyatnikovSobolev Institute of Mathematics,Russia
F. GonzalezTufts University, USA
E. GrinbergUniversity of Massachusetts Boston,USA
P. GumenyukUniversita di Roma “Tor Vergata”,Italy
Y. GuoWeizmann Institute, Israel
L. HarrisUniversity of Kentucky, USA
R. Hernandez ReyesUniversidad Adolfo Ibanez, Chile
R. Hurri-SyrjanenHelsingin yliopisto, Finland
A. IosevichUniversity of Rochester, USA
A. IsaevAustralian National University,Australia
G. IvanovUniversitetet i Bergen, Norway
S. KanasPolitechnika Rzeszowska, Poland
L. KarpORT Braude College, Israel
V. KatsnelsonWeizmann Institute of Science, Israel
O. KelisHaifa University and Ort BraudeCollege, Israel
R. KerdmanORT Braude College, Israel
V. KhatskevichORT Braude College, Israel

PARTICIPANTS xxxi
D. KhavinsonUniversity of South Florida, USA
A. KleinThe Hebrew University, Israel
A. KoldobskyUniversity of Missouri-Columbia, USA
V. KormanORT Braude College, Israel
J. KozickiUniversity of Maria Curie-Sk�lodowska,PolandLublinie, Poland
G. KresinAriel University, Israel
S. KrushkalBar-Ilan University, Israel
P. KuchmentBar-Ilan University, Israel
T. KuczumowUniversity of Maria Curie-Sk�lodowska,Poland
L. KunyanskyUniversity of Arizona, Tucson, USA
A. KytmanovSiberian Federal University, Russia
N. LevBar-Ilan University, Israel
M. LevenshteinORT Braude College, Israel
M. LevenshteinORT Braude College, Israel
E. LevinOpen University, Israel
P. LiczberskiORT Braude College, Israel
E. LiflyandBar-Ilan University, Israel
D. LubinskyGeorgia Institute of Technology,Atlanta, USA
S. LucenteUniversita degli Studi di Bari AldoMoro, Italy
Y. LutskyORT Braude College, Israel
Y. LyubarskiiNorges Teknisk-naturvitenskapeligeUniversitet, Norway
E. MalinnikovaNorges Teknisk-naturvitenskapeligeUniversitet, Norway
M. J. MartınUniversidad Autonoma de Madrid,Spain
V. Maz’yaLinkopings Universitet, Sweden
P. MellonUniversity College Dublin, Ireland
E. MilmanThe Technion – Israel Institute ofTechnology, Israel
I. MitreaTemple University, USA
V. MoncriefYale University, USA
A. Montes-RodrıguezUniversidad De Sevilla, Spain
K. MooreUniversitat Potsdam, Germany
S. MyslivetsSiberian Federal University,Krasnoyarsk, RussiaL. NguyenUniversity of Idaho, USA
A. OlevskiiTel Aviv University, Israel
T. OliynykMonash University, Australia
E. OshiroSiberian Federal University, Russia

xxxii PARTICIPANTS
V. OstrovskiiORT Braude College, Israel
E. PogrebnyakORT Braude College, Israel
D. V. ProkhorovSaratov State University, Russia
S. ReichTechnion – Israel Institute ofTechnology, Israel
M. ReissigTechnische Universitat BergakademieFreiberg, Germany
B. RubinUniversity of Louisiana, USA
Z. RudnickTel Aviv University, Israel
M. RuzhanskyImperial College, London, UK
D. RyaboginKent State University, USA
Z. RychlikUniwersytet Marii Curie-Sk�lodowskiejw Lublinie, Poland
T. SavinaOhio University, USA
F. SchwartzUniversity of Tennessee, USA
B. W. SchulzeUniversitat Potsdam, Germany
F. SchwartzUniversity of Tennessee, USA
A. SergeevSteklov Institute of Mathematics,Moscow, Russia
Y. SevostyanovSteklov Institute of Mathematics,Moscow, Russia
A. ShishkovInstitute of Applied Mathematics andMechanics, Ukraine
D. ShoikhetORT Braude College, Israel
L. ShvartsmanORT Braude College, Israel
M. SodinTel Aviv University, Israel
J. SolomonHebrew University, Israel
A. SolyninTexas Tech University, USA
I. SpitkovskyCollege of William & Mary, USA
M. SugimotoUniversity of Nagoya, Japan
G. TaglialatelaUniversity of Bari, Italy
S. TikhonovICREA and CRM, Spain
E. TitiWeizmann Institute of Science, Israel
P. ToppingUniversity of Warwick, UKCollege,Israel
A. TumanovUniversity of Illinois, USA
V. TuretskyORT Braude College, Israel
A. UkhlovBen-Gurion University of the Negev,Israel
I. VainsteinBen-Gurion University of the Negev,Israel
A. Vasil’evUniversitetet i Bergen, Norway
D. VassilievUniversity College London, UK
A. VidrasUniversity of Cyprus, Cyprus

PARTICIPANTS xxxiii
S. VodopianovSobolev Institute of Mathematics,Russia
G. WeinsteinMonash University, Australia
Y. WeitUniversity of Haifa, Israel
F. YacobzonORT Braude College, Israel
Y. YomdinWeizmann Institute of Science, Israel
M. ZaidenbergInstitut Fourier, Grenoble, France
V. ZakharyutaSabanci University, Turkey
L. ZalcmanBar-Ilan University, Israel
N. ZobinCollege of William & Mary, USA


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13174
Inversion of a Class of Circularand Elliptical Radon Transforms
Gaik Ambartsoumian and Venkateswaran P. Krishnan
Abstract. The paper considers a class of elliptical and circular Radon trans-forms appearing in problems of ultrasound imaging. These transforms put intocorrespondence to an unknown image function f in 2D its integrals Rf along
a family of ellipses (or circles) . From the imaging point of view, of particu-lar interest is the circular geometry of data acquisition. Here the generalizedRadon transform R integrates f along ellipses (circles) with their foci (centers)located on a fixed circle C. We prove that such transforms can be uniquely in-verted from radially incomplete data to recover the image function in annularregions. Our results hold for cases when f is supported inside and/or outsideof the data acquisition circle C.
1. Introduction
In various modalities of ultrasound imaging, the object under investigation isprobed by sending through it acoustic waves and measuring the resulting wavereflections. In the bi-static setup of ultrasound reflection tomography (URT), oneuses an emitter and a receiver separated from each other to send and receive acousticsignals at various locations around the body. In the mono-static case, the samedevice (a transducer) works both as an emitter and as a receiver.
The mathematical model considered in this paper uses two simplifying assump-tions, which hold reasonably well in many applications. We assume that the speedof sound propagation in the medium is constant and the medium is weakly reflect-ing. The latter means that we ignore the signals that arrive at the receiver afterreflecting more than once inside the object. Under these assumptions, the timedelay t between sending and receiving the signal defines the distance d1 + d2 trav-eled by the wave from the emitter to the reflection location and from there to thereceiver. Hence the measured signal is the superposition of all echoes generated byinclusions located at points x that have a constant sum d1 + d2 of distances to theemitter and the receiver. In the bi-static setup, this corresponds to the integral of
2010 Mathematics Subject Classification. Primary 44A12, 45D05, 92C55.Key words and phrases. xx.The work of both authors was supported in part by NSF grant DMS-1109417. The second
author benefited from the support of the Airbus Group Corporate Foundation Chair in Mathe-matics of Complex Systems established at TIFR Centre for Applicable Mathematics and TIFRInternational Centre for Theoretical Sciences, Bangalore, India.
The first author thanks the organizers of the 2013 Conference on Complex Analysis andDynamical Systems VI in Nahariya, Israel, for hospitality and great organization.
c©2015 G. Ambartsoumian, V. P. Krishnan1

2 G. AMBARTSOUMIAN AND V.P. KRISHNAN
the acoustic reflectivity function f(x) along an ellipse with foci at the emitter andreceiver locations. In the mono-static setup, it corresponds to the integral of f(x)along a circle centered at the transducer location. The grayscale graph of f(x) isused as an image of the medium; hence we need to find f from its correspondingintegrals. By measuring the wave reflections for different time delays and differentlocations of the emitter and receiver, one can generate a set of integrals Rf of thefunction f along a 2D family of ellipses or circles. The problem of image reconstruc-tion in URT is then mathematically equivalent to the inversion of the correspondinggeneralized Radon transform R. For more details and rigorous derivation of themathematical model we refer the reader to [6,13,16] and the references therein.
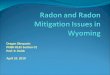
From the imaging point of view, the circular geometry of data acquisition isof particular interest. Here the emitter and the receiver travel along a circle Cand are a fixed distance 2a apart from each other. In the mono-static case thatfixed distance is simply 0. By making the signal measurements for various positionsγT (φ) of the emitter and γR(φ) of the receiver and various time delays t, one cangenerate a 2D set of integrals Rf(φ, t) along ellipses (circles). These ellipses havefoci at γT (φ) and γR(φ) (circles have centers at γT (φ)) and the size of their majorand minor semi-axes (or radii for circles) are defined by t (see Figure 1).
Figure 1. The sketch of the bi-static setup of URT and the variables.
The problem of inversion of the circular Radon transform (CRT) has beenextensively studied before by various authors (e.g. see [1, 2, 4, 5, 7, 9–13, 15, 16,18–20,22] and the references there). Most of these works deal with the inversion ofCRT when the Rf data is available for all possible radii. Few of them deal with theinversion of CRT from radially incomplete data and we refer the reader to [4] fora detailed discussion of those works. However very little is known about inversionof the elliptical Radon transforms (ERT). Some limited results were established in[3, 12, 13, 22], most of which deal with inversion of ERT from either full or halfdata in the “radial” variable.

A CLASS OF CIRCULAR AND ELLIPTICAL RADON TRANSFORMS 3
In [4], the authors provided an exact inversion formula for CRT from radiallypartial data in the circular geometry of data acquisition. The current paper buildsup on the results and techniques established in [4] and presents some further resultsboth for CRT and ERT. We prove that such transforms can be uniquely invertedfrom radially incomplete data, that is, from data where t is limited to a smallsubset of R+. Our inversion formulas recover the image function f in annularregions defined by the smallest and largest available values of t. The results holdfor cases when f is supported inside C (e.g. in mammography [13, 14]), outsideof C (e.g. in intravascular imaging [6]), or simultaneously both inside and outside(e.g. in radar imaging [3]).
The rest of the paper is organized as follows. In Section 2, we introduce thenotations and definitions. In Section 3, we present the main results in the form ofthree theorems. The proofs of these theorems are provided in Section 4. Section 5includes additional remarks and acknowledgments.
2. Notation
Let us consider a generalized Radon transform integrating a function f(x) oftwo variables along ellipses with the foci located on the circle C(0, R) centered at0 of radius R and 2a units apart (see Figure 1). We denote the fixed differencebetween the polar angles of the two foci by 2α, where α ∈ (0, π/2) and define
a = R sinα, b = R cosα.
We parameterize the location of the foci by
γT (φ) = R (cos(φ− α), sin(φ− α)),
γR(φ) = R (cos(φ+ α), sin(φ+ α)) for φ ∈ [0, 2π].
Thus the foci move on the circle and are always 2a units apart. For φ ∈ [0, 2π] andρ > 0, let
E(ρ, φ) = {x ∈ R2 : |x− γT (φ)|+ |x− γR(φ)| = 2√
ρ2 + a2}.Note that the center of the ellipse E(ρ, φ) is (b cosφ, b sinφ) and ρ is the minorsemiaxis of E(ρ, φ).
Consider a compactly supported function f(r, θ), where (r, θ) denote the polarcoordinates in the plane. The elliptical Radon transform (ERT) of f on the ellipseparameterized by (ρ, φ) is denoted by
REf(ρ, φ) =
∫E(ρ,φ)
f(r, θ) ds,
where ds is the arc-length measure on the ellipse.If we take a = α = 0, then the foci coincide and the ellipses E(ρ, φ) become
circlesC(ρ, φ) = {x ∈ R2 : |x− γT (φ)| = ρ}.
The resulting circular Radon transform (CRT) of f on the circle parameterized by(ρ, φ) is denoted by
RCf(ρ, φ) =
∫C(ρ,φ)
f(r, θ) ds,
where ds is the arc-length measure on the circle.In the rest of the text, we will use the notation g(ρ, φ) to denote eitherREf(ρ, φ),
or (when working with CRT) RCf(ρ, φ).

4 G. AMBARTSOUMIAN AND V.P. KRISHNAN
Since both f(r, θ) and g(ρ, φ) are 2π-periodic in the second variable, one canexpand these functions into Fourier series
(1) f(r, θ) =
∞∑n=−∞
fn(r) einθ
and
(2) g(ρ, φ) =
∞∑n=−∞
gn(ρ) einφ,
where
fn(r) =1
2π
∫ 2π
0
f(r, θ) e−inθdθ
and
gn(ρ) =1
2π
∫ 2π
0
g(ρ, φ) e−inφdφ.
We will use Cormack-type [8] inversion strategy to recover Fourier coefficientsof f from those of g for limited values of ρ both for CRT and ERT in various setupsof the support of f .
In the statements below, we denote by A(r1, r2) the open annulus with radii0 < r1 < r2 centered at the origin
A(r1, r2) = {(r, θ) : r ∈ (r1, r2), θ ∈ [0, 2π]}.The disc of radius R centered at the origin is denoted by D(0, R).
The k-th order Chebyshev polynomial of the first kind is denoted by Tk, i.e.
Tk(t) = cos(k arccos t).
3. Main Results
The first statement in this section is a generalization of Theorem 1 from [4],which was proved for CRT, to the case of ERT.
Theorem 3.1. Let f(r, θ) be a continuous function supported inside the annulusA(ε, b). Suppose REf(ρ, φ) is known for all φ ∈ [0, 2π] and ρ ∈ (0, b−ε), then f(r, θ)can be uniquely recovered.
In this and other theorems of this section, we require f to be continuous, whichguarantees the convergence of the Fourier series (1) and (2) almost everywhere. Ifone needs to ensure convergence everywhere, then some additional conditions on f(e.g. bounded variation) should be added. At the same time, if we assume that fis only piecewise continuous with respect to r for each fixed θ, then we will recoverf correctly at points of continuity. As a result, if the function f is not identicallyzero in D(0, ε1), then one can consider a modified function f such that
f(r, θ) =
⎧⎪⎨⎪⎩0, r ≤ ε
f(r, θ), ε1 < r < b
smooth cutoff , ε < r < ε1.
It is easy to notice that if ε < ε1 then f satisfies the hypothesis of the theorem,and by sending ε1 → ε we also have REf(ρ, φ) = RE f(ρ, φ) for all φ ∈ [0, 2π] andρ ∈ (0, b− ε1). Hence we get the following statement.

A CLASS OF CIRCULAR AND ELLIPTICAL RADON TRANSFORMS 5
Figure 2. A sketch for Theorem 3.1. The shaded area denotes thesupport of f , the dashed circle is the set of centers of the integrationellipses.
Remark 3.2. In order to reconstruct the function f(r, θ) in any subset Ω ofthe disc of its support D(0, R), one needs to know REf(ρ, φ) only for ρ < b− R0,where R0 = inf{|x|, x ∈ Ω}.
In other words, to image something at depth d from the surface of the disc, oneonly needs REf(ρ, φ) data for ρ ∈ [0, d], without making any assumptions aboutthe shape of the support of f inside that disc.
The next two theorems demonstrate the possibility of inverting CRT and ERTfrom radially partial data when the support of the function f lies on both sides ofthe data acquisition circle C (see Figures 3 and 4).

6 G. AMBARTSOUMIAN AND V.P. KRISHNAN
Figure 3. A sketch for Theorem 3.3. The shaded area denotesthe support of f , the dashed inner circle is the set of transducerlocations (centers of integration circles).
Figure 4. A sketch for Theorem 3.4. The shaded area denotesthe support of f , the dashed inner circle is the set of the centersof integration ellipses.

A CLASS OF CIRCULAR AND ELLIPTICAL RADON TRANSFORMS 7
Theorem 3.3. Let f(r, θ) be a continuous function supported inside the discD(0, R2) with R2 > 2R. Suppose RC(ρ, φ) is known for all φ ∈ [0, 2π] and ρ ∈ [R2−R,R2+R], then f(r, θ) can be uniquely recovered in A(R1, R2) where R1 = R2−2R.
Theorem 3.4. Let f(r, θ) be a continuous function supported inside the discD(0, R2) with R2 > 2b. Suppose RE(ρ, φ) is known for all φ ∈ [0, 2π] and ρ ∈ [R2−b, R2 + b], then f(r, θ) can be uniquely recovered in A(R1, R2) where R1 = R2 − 2b.
4. Proofs
The proofs of all three theorems are similar. The idea is to reduce the problemof inverting the generalized Radon transforms to solving an integral equation witha special kernel for Fourier coefficients of f . We will prove Theorem 3.1 in detail,then indicate the arising differences in the proofs of the other two theorems, andthe strategy of dealing with those differences.
Proof of Theorem 3.1. By using the definition of ERT and the Fourier se-ries expansion of f , we get
g(ρ, φ) =
∫E(ρ,φ)
f(r, θ) ds =
+∞∑n=−∞
∫E(ρ,φ)
fn(r) einθ ds
=
+∞∑n=−∞
∫E+(ρ,φ)
fn(r)(einθ + ein(2φ−θ)
)ds
where E+(ρ, φ) denotes the part of the ellipse E(ρ, φ) corresponding to θ ≥ φ (seeFigure 1). Simplifying further we get
g(ρ, φ) = 2+∞∑
n=−∞
∫E+(ρ,φ)
fn(r) cos [n(θ − φ)] einφds.
Comparing this equation with (2) we obtain
(3) gn(ρ) = 2
∫E+(ρ,φ)
fn(r) cos [n(θ − φ)] ds.
As we explicitly show below (see formulas (4) and (5)), the Fourier series expansiondiagonalizes the Radon transform, i.e. gn depends only on fn and vice versa for allinteger values of n. Hence the problem of inverting ERT in this setup is reducedto solving the one-dimensional integral equation (3). Let us discuss this in detail.
Since the left-hand side of equation (3) does not depend on φ, it should hold forany choice of φ in the right-hand side. Without loss of generality, we will assumefrom now on that φ = π/2. Then the points of E+(ρ, φ) for ρ ∈ (0, b − ε) will belimited to the second quadrant. We parameterize the points on E+(ρ, φ) as follows:
x(t) = −√
ρ2 + a2 sin t, y(t) = b− ρ cos t, t ∈ [0, π/2].

8 G. AMBARTSOUMIAN AND V.P. KRISHNAN
For brevity denote A =√
ρ2 + a2 and B = ρ. Then simple calculations show that
ds =√
A2 cos2 t+B2 sin2 t dt,
θ − φ = arccos
(b−B cos t
r
),
cos t =−bρ+
√R2ρ2 + a2(R2 − r2)
a2, and
sin2 t =
[a2 +
(√R2ρ2 + a2(R2 − r2)− bρ
)] [a2 −
(√R2ρ2 + a2(R2 − r2)− bρ
)]a4
.
Let us now rewrite the integral in (3) in the variable r. We have
gn(ρ) =
= 2a
b∫b−ρ
r fn(r) Tn
(b(ρ2+a2)−ρ
√R2ρ2+a2(R2−r2)
a2r
)√2R2ρ2 + a2(R2 − r2) − 2bρ
√R2ρ2 + a2(R2 − r2) dr
√R2ρ2 + a2(R2 − r2)
√(a2 + (
√R2ρ2 + a2(R2 − r2) − bρ))(a2 − (
√R2ρ2 + a2(R2 − r2) − bρ))
=
b∫b−ρ
Kn(ρ, r)√a2 + bρ −
√R2ρ2 + a2(R2 − r2)
fn(r) dr
where
Kn(ρ, r) =
2arTn
(b(ρ2+a2)−ρ
√R2ρ2+a2(R2−r2)
a2r
)√2R2ρ2 + a2(R2 − r2) − 2bρ
√R2ρ2 + a2(R2 − r2)
√R2ρ2 + a2(R2 − r2)
√a2 + (
√R2ρ2 + a2(R2 − r2) − bρ)
.
Making the change of variables u = b− r, we get
gn(ρ) =
∫ ρ
0
Kn(ρ, b− u)√a2 + bρ−
√R2ρ2 + a2(R2 − (b− u)2)
fn(b− u) du(4)
=
∫ ρ
0
Kn(ρ, u)√ρ− u
Fn(u) du,
where(5)
Fn(u) = fn(b− u) and Kn(ρ, u) =Kn(ρ, b− u)
√ρ− u√
a2 + bρ−√
R2ρ2 + a2(R2 − (b− u)2).
A simple calculation shows that a2 + bρ −√
R2ρ2 + a2(R2 − (b− u)2) = 0 ifand only if u = ρ and its derivative at u = ρ does not vanish. Therefore, Kn(ρ, u)is a C1 function.
Hence (4) is a Volterra integral equation of the first kind with a weakly singularkernel (e.g. see [21,23]). This type of equations has a unique solution and thereis a standard approach for writing down that solution through a resolvent kernelusing Picard’s process of successive approximations (e.g. see [21]). The details ofthis part follow exactly as in [4, Theorem 1], and this finishes the proof. �

A CLASS OF CIRCULAR AND ELLIPTICAL RADON TRANSFORMS 9
Proof of Theorem 3.3. Similar to the proof of the previous theorem, wehave
g(ρ, φ) =
∫C(ρ,φ)
f(r, θ) ds =∞∑
n=−∞
∫C(ρ,φ)
fn(r) einθds
=∞∑
n=−∞
∫C+(ρ,φ)
fn(r)(einθ + ein(2φ−θ)
)ds
where C+(ρ, φ) denotes the part of the circle C(ρ, φ) corresponding to θ ≥ φ.
g(ρ, φ) = 2∞∑
n=−∞
∫C+(ρ,φ)
fn(r) cos [n(θ − φ)] einφds.
Therefore we have,
(6) gn(ρ) = 2
∫C+(ρ,φ)
fn(r) cos [n(θ − φ)] ds.
Then
θ − φ = arccos
(r2 +R2 − ρ2
2rR
)and
gn(ρ) = 2
∫C+(ρ,φ)
fn(r) Tn
(r2 +R2 − ρ2
2rR
)ds
=2
R
∫ R2
ρ−R
r Tn
(r2+R2−ρ2
2rR
)√1−
(ρ2+R2−r2
2ρR
)2fn(r) dr.
Let us make the substitution, u = R2 − r. We get
gn(ρ) =2
R
∫ R2+R−ρ
0
(R2 − u)Tn
((R2−u)2+R2−ρ2
2(R2−u)R
)√1−
(ρ2+R2−(R2−u)2
2ρR
)2fn(R2 − u) du.
Setting ρ = R2 +R − ρ for simplicity and renaming ρ as ρ, we have
gn(R2 +R− ρ) =2
R
∫ ρ
0
(R2 − u) Tn
((R2−u)2+R2−(R2+R−ρ)2
2(R2−u)R
)√1−
((R2+R−ρ)2+R2−(R2−u)2
2(R2+R−ρ)R
)2fn(R2 − u) du
= 4
∫ ρ
0
(R2 +R− ρ)(R2 − u)Tn
((R2−u)2+R2−(R2+R−ρ)2
2(R2−u)R
)√(ρ− u)(2R2 − ρ− u)(2R+ u− ρ)(2R+ 2R2 − ρ− u)
fn(R2 − u) du
=
∫ ρ
0
Kn(ρ, u)√ρ− u
Fn(u) du.
Here Kn and Fn are
Kn(ρ, u) =4(R2 +R− ρ)(R2 − u)Tn
((R2−u)2+R2−(R2+R−ρ)2
2(R2−u)R
)√(ρ− u)(2R2 − ρ− u)(2R+ u− ρ)(2R+ 2R2 − ρ− u)

10 G. AMBARTSOUMIAN AND V.P. KRISHNAN
and
Fn(u) = fn(R2 − u).
Note that Kn(ρ, u) is a C1 function. The rest of the proof follows exactly as in[4, Theorem 1]. This completes the proof. �
Proof of Theorem 3.4. We have
g(ρ, φ) =
∫E(ρ,φ)
f(r, θ) ds =
∞∑n=−∞
∫E(ρ,φ)
fn(r) einθ ds
=
∞∑n=−∞
∫E+(ρ,φ)
fn(r)(einθ + ein(2φ−θ)
)ds
where E+(ρ, φ) denotes the part of the ellipse E(ρ, φ) corresponding to θ ≥ φ.
g(ρ, φ) = 2∞∑
n=−∞
∫E+(ρ,φ)
fn(r) cos [n(θ − φ)] einφds.
Therefore we have,
(7) gn(ρ) = 2
∫E+(ρ,φ)
fn(r) cos [n(θ − φ)] ds.
We first observe that, without loss of generality, we may assume from nowon that φ = π/2. We introduce the following elliptic coordinates on the ellipsedetermined by ρ:
x(t) = −√
ρ2 + a2 sin t, y(t) = b− ρ cos t.
For simplicity denote A =√
ρ2 + a2 and B = ρ
ds =√
A2 cos2 t+B2 sin2 t dt
θ − φ = arccos
(b−B cos t
r
)cos t =
−bρ+√
R2ρ2 + a2(R2 − r2)
a2
sin2 t =(a2 + (
√R2ρ2 + a2(R2 − r2)− bρ))(a2 − (
√R2ρ2 + a2(R2 − r2)− bρ))
a4.
Let us now rewrite the integral in (7) in the variable r. We have
gn(ρ) =
= 2a
R2∫ρ−b
rfn(r)Tn
(b(ρ2+a2)−ρ
√R2ρ2+a2(R2−r2)
a2r
)√2R2ρ2 + a2(R2 − r2) − 2bρ
√R2ρ2 + a2(R2 − r2)
√R2ρ2 + a2(R2 − r2)
√(a2 + (
√R2ρ2 + a2(R2 − r2) − bρ))(a2 − (
√R2ρ2 + a2(R2 − r2) − bρ))
dr
=
R2∫ρ−b
Kn(ρ, r)√a2 + bρ −
√R2ρ2 + a2(R2 − r2)
fn(r) dr
where
Kn(ρ, r) =
2arTn
(b(ρ2+a2)−ρ
√R2ρ2+a2(R2−r2)
a2r
)√2R2ρ2 + a2(R2 − r2) − 2bρ
√R2ρ2 + a2(R2 − r2)
√R2ρ2 + a2(R2 − r2)
√a2 + (
√R2ρ2 + a2(R2 − r2) − bρ)
.

A CLASS OF CIRCULAR AND ELLIPTICAL RADON TRANSFORMS 11
Making the change of variable u = R2 − r, ρ = R2 + b − ρ, and replacing ρ by ρ,we get
gn(R2 + b− ρ) =ρ∫
0
Kn(R2 + b− ρ,R2 − u)√a2 + b(R2 + b− ρ)−
√R2(R2 + b− ρ)2 + a2(R2 − (R2 − u)2)
fn(R2 − u) du
=
ρ∫0
Kn(ρ, u)√ρ− u
Fn(u) du,
where Fn(u) = fn(R2 − u) and
Kn(ρ, u) =Kn(R2 + b− ρ,R2 − u)
√ρ− u√
a2 + b(R2 + b− ρ)−√
R2(R2 + b− ρ)2 + a2(R2 − (R2 − u)2).
A simple calculation would show that
a2 + b(R2 + b− ρ)−√
R2(R2 + b− ρ)2 + a2(R2 − (R2 − u)2 = 0
if and only if u = ρ and its derivative at u = ρ does not vanish. Therefore, Kn(ρ, u)is a C1 function.
Now rest of the proof follows exactly as in [4, Theorem 1]. �
5. Additional Remarks and Acknowledgments
The second author and his collaborators have numerically implemented theinversion formulas obtained in [4] and in this paper; see [17].
Both authors express their gratitude to Eric Todd Quinto, Souvik Roy and RimGouia-Zarrad for helpful comments and discussions.
References
[1] Mark Agranovsky, Carlos Berenstein, and Peter Kuchment, Approximation by spherical wavesin Lp-spaces, J. Geom. Anal. 6 (1996), no. 3, 365–383 (1997), DOI 10.1007/BF02921656.MR1471897 (99c:41038)
[2] Mark L. Agranovsky and Eric Todd Quinto, Injectivity sets for the Radon transform overcircles and complete systems of radial functions, J. Funct. Anal. 139 (1996), no. 2, 383–414,DOI 10.1006/jfan.1996.0090. MR1402770 (98g:58171)
[3] Gaik Ambartsoumian, Raluca Felea, Venkateswaran P. Krishnan, Clifford Nolan, and EricTodd Quinto, A class of singular Fourier integral operators in synthetic aperture radar imag-
ing, J. Funct. Anal. 264 (2013), no. 1, 246–269, DOI 10.1016/j.jfa.2012.10.008. MR2995706[4] Gaik Ambartsoumian, Rim Gouia-Zarrad, and Matthew A. Lewis, Inversion of the circu-
lar Radon transform on an annulus, Inverse Problems 26 (2010), no. 10, 105015, 11, DOI10.1088/0266-5611/26/10/105015. MR2719776 (2011h:44001)
[5] Gaik Ambartsoumian and Peter Kuchment, On the injectivity of the circular Radontransform, Inverse Problems 21 (2005), no. 2, 473–485, DOI 10.1088/0266-5611/21/2/004.MR2146272 (2006d:44001)
[6] Gaik Ambartsoumian and Leonid Kunyansky, Exterior/interior problem for the circularmeans transform with applications to intravascular imaging, Inverse Probl. Imaging 8 (2014),no. 2, 339–359, DOI 10.3934/ipi.2014.8.339. MR3209301
[7] Yuri A. Antipov, Ricardo Estrada, and Boris Rubin, Method of analytic continuation for theinverse spherical mean transform in constant curvature spaces, J. Anal. Math. 118 (2012),no. 2, 623–656, DOI 10.1007/s11854-012-0046-y. MR3000693
[8] Allan Cormack, Representation of a function by its line integrals, with some radiologicalapplications, J. Appl. Phys. 34 (1963), no. 9, 2722–2727.

12 G. AMBARTSOUMIAN AND V.P. KRISHNAN
[9] David Finch, Markus Haltmeier, and Rakesh, Inversion of spherical means and the waveequation in even dimensions, SIAM J. Appl. Math. 68 (2007), no. 2, 392–412, DOI10.1137/070682137. MR2366991 (2008k:35494)
[10] David Finch, Sarah K. Patch, and Rakesh, Determining a function from its mean valuesover a family of spheres, SIAM J. Math. Anal. 35 (2004), no. 5, 1213–1240 (electronic), DOI10.1137/S0036141002417814. MR2050199 (2005b:35290)
[11] Leonid A. Kunyansky, Explicit inversion formulae for the spherical mean Radon transform,
Inverse Problems 23 (2007), no. 1, 373–383, DOI 10.1088/0266-5611/23/1/021. MR2302980(2007m:44002)
[12] M. M. Lavrentiev, V. G. Romanov, and V. G. Vasiliev, Multidimensional inverse problemsfor differential equations (Russian), Lecture Notes in Mathematics, Vol. 167, Springer-Verlag,Berlin-New York, 1970. MR0277867 (43 #3600)
[13] Serge Mensah and Emilie Franceschini, Near-field ultrasound tomography, J. Acoust. Soc.Am. 121 (2007), 1423–1433.
[14] Serge Mensah, Emilie Franceschini and Marie-Christine Pauzin, Ultrasound mammography,Nucl. Instr. Meth. Phys. Re, Section A, 571, 2007, no. 3, 52–55.
[15] Linh V. Nguyen, A family of inversion formulas in thermoacoustic tomography, Inverse Probl.Imaging 3 (2009), no. 4, 649–675, DOI 10.3934/ipi.2009.3.649. MR2557923 (2011b:35567)
[16] Stephen J. Norton, Reconstruction of a two-dimensional reflecting medium over a cir-cular domain: exact solution, J. Acoust. Soc. Amer. 67 (1980), no. 4, 1266–1273, DOI10.1121/1.384168. MR565125 (81a:76040)
[17] Souvik Roy, Venkateswaran P. Krishnan, Praveen Chandrashekar and A. S. Vasudeva Murthy,An efficient numerical algorithm for the inversion of an integral transform arising in ultra-sound imaging, J. Math. Imaging Vision (2014), DOI 10.1007/s10851-014-0550-z, 14pp.
[18] Boris Rubin, Inversion formulae for the spherical mean in odd dimensions and the Euler-Poisson-Darboux equation, Inverse Problems 24 (2008), no. 2, 025021, 10, DOI 10.1088/0266-5611/24/2/025021. MR2408558 (2009f:44001)
[19] Plamen Stefanov and Gunther Uhlmann, Thermoacoustic tomography with variable soundspeed, Inverse Problems 25 (2009), no. 7, 075011, 16, DOI 10.1088/0266-5611/25/7/075011.MR2519863 (2010i:35439)
[20] Plamen Stefanov and Gunther Uhlmann, Thermoacoustic tomography arising in brain imag-ing, Inverse Problems 27 (2011), no. 4, 045004, 26, DOI 10.1088/0266-5611/27/4/045004.MR2781028 (2012f:76113)
[21] F. G. Tricomi, Integral equations, Dover Publications, Inc., New York, 1985. Reprint of the1957 original. MR809184 (86k:45001)
[22] V. V. Volchkov, Integral geometry and convolution equations, Kluwer Academic Publishers,Dordrecht, 2003. MR2016409 (2005e:28001)
[23] Vito Volterra, Theory of functionals and of integral and integro-differential equations, Witha preface by G. C. Evans, a biography of Vito Volterra and a bibliography of his publishedworks by E. Whittaker, Dover Publications, Inc., New York, 1959. MR0100765 (20 #7193)
Department of Mathematics, University of Texas at Arlington, Arlington, Texas
76019
E-mail address: [email protected]
Tata Institute of Fundamental Research, Centre for Applicable Mathematics,
Bangalore 560065 Karnataka, India
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13175
Free Jump Dynamics in Continuum
Joanna Baranska and Yuri Kozitsky
Abstract. The evolution is described of an infinite system of hopping pointparticles in Rd. The states of the system are probability measures on the spaceof configurations of particles. Under the condition that the initial state μ0 has
correlation functions of all orders which are: (a) k(n)μ0 ∈ L∞((Rd)n) (essentially
bounded); (b) ‖k(n)μ0 ‖L∞((Rd)n) ≤ Cn, n ∈ N (sub-Poissonian), the evolution
μ0 �→ μt, t > 0, is obtained as a continuously differentiable map kμ0 �→ kt,
kt = (k(n)t )n∈N, in the space of essentially bounded sub-Poissonian functions.
In particular, it is proved that kt solves the corresponding evolution equation,and that for each t > 0 it is the correlation function of a unique state μt.
1. Introduction
In this paper, we study the dynamics of an infinite system of point particlesx ∈ Rd, d ≥ 1. States of the system are discrete subsets of Rd – configurations,which constitute the set
(1.1) Γ = {γ ⊂ Rd : |γ ∩ Λ| <∞ for any compact Λ ⊂ Rd},where | · | stands for cardinality. Note that Γ contains also finite configurations,including the empty one. The set Γ can be completely and separably metrized, see[1,7], and thus equipped with the corresponding Borel σ-field B(Γ). The elementsof Γ are considered as point states of the system in the sense that, for a suitablefunction F : Γ → R, the number F (γ) is treated as the value of observable F instate γ. Along with point states γ ∈ Γ one employs states determined by probabilitymeasures on B(Γ). In this case, the corresponding value is the integral
〈〈F, μ〉〉 :=∫Γ
Fdμ,
and the system’s dynamics are described as maps μ0 → μt, t > 0.In the Markov approach, the map μ0 → μt is obtained from the Fokker-Planck
equation
(1.2)d
dtμt = Lμμt, μt|t=0 = μ0, t > 0,
2010 Mathematics Subject Classification. Primary 37N25, 47D06, 60G55, 92D15.Key words and phrases. Random point field, evolution, Kolmogorov equation, jump
dynamics.This work was supported in part by the DFG through SFB 701: “Spektrale Strukturen und
Topologische Methoden in der Mathematik” and by the European Commission under the projectSTREVCOMS PIRSES-2013-612669.
c©2015 J. Baranska, Y. Kozitsky13

14 JOANNA BARANSKA AND YURI KOZITSKY
in which ‘generator’ Lμ specifies the model. In order to solve (1.2) in the set ofprobability measures one has to introduce an appropriate mathematical setting,e.g., a Banach space of signed measures, and then to define Lμ as a linear operatorin this space. However, for infinite systems such a direct way is rather impossible.By the duality
(1.3) 〈〈F0, μt〉〉 = 〈〈Ft, μ0〉〉, t > 0,
the observed evolution 〈〈F, μ0〉〉 → 〈〈F, μt〉〉 can also be considered as the evolution〈〈F0, μ〉〉 → 〈〈Ft, μ〉〉 obtained from the Kolmogorov equation
(1.4)d
dtFt = LFt, Ft|t=0 = F0, t > 0,
where L and Lμ are dual in the sense of (1.3). Thus, also ‘generator’ L specifiesthe model. Various types of such generators are discussed in [6]. In this paper, weconsider the model specified by
(1.5) (LF )(γ) =∑x∈γ
∫Rd
a(x− y) [F (γ \ x ∪ y)− F (γ)] dy.
Here and in the sequel in the corresponding context, x ∈ Rd is also treated as asingle-point configuration {x}. The jump kernel a(x) = a(−x) ≥ 0 is supposed tosatisfy the condition
(1.6)
∫Rd
a(x)dx =: α < +∞.
The ‘generator’ in (1.5) describes free jumps of the elements of configurations. Inmodels where jumps are not free, the kernel a depends also on γ, see [2,6].
Similarly as above, to solve (1.4) one should define L as a linear operator in anappropriate Banach space of functions, which can also be problematic as the sum in(1.5) typically runs over an infinite set. One of the possibilities here is to constructa Markov process γt with state space Γ, which starts from a fixed configurationγ0 ∈ Γ. Then μγ0
t – the law of γt, solves (1.2) with μ0 = δγ0(the Dirac measure).
However, since the evolution of the model (1.5) includes simultaneous jumps ofan infinite number of points, there can exist γ0 such that with probability one atsome t > 0 infinitely many points appear in a bounded Λ, see the correspondingdiscussion in [8]. The reason for this is that the configuration space (1.1) appears tobe too big and cannot serve as a state-space for the corresponding process. In [8],under a more restrictive condition than that in (1.6) (see eq. (39) in that paper),the Markov process corresponding to (1.5) was constructed for γ0, and hence allγt, t > 0, lying in a certain proper measurable subset Θ ⊂ Γ. By this result, theevolution μ0 → μt corresponding to (1.2) with μ0(Θ) = 1 can be obtained by theformula
μt(·) =∫Γ
μγt (·)μ0(dγ),
which guarantees also that μt(Θ) = 1 for all t > 0.There exists another approach to solving (1.2) in which instead of restricting
the set of configurations where the process takes its values one restricts the set ofinitial measures μ0. This restriction amounts to imposing a condition, formulatedin terms of the so called correlation measures. For n ∈ N and a probability measure

FREE JUMP DYNAMICS IN CONTINUUM 15
μ on B(Γ), the n-th order correlation measure χ(n)μ is related to μ by the following
formula ∫Γ
( ∑{x1,...,xn}⊂γ
G(n)(x1, . . . , xn)
)μ(dγ)(1.7)
=1
n!
∫(Rd)n
G(n)(x1, . . . , xn)χ(n)μ (dx1, . . . , dxn),
which ought to hold for all bounded, compactly supported measurable functionsG(n) : (Rd)n → R, see, e.g., [6,7]. Now the mentioned condition is that, for each n ∈N, χ(n)
μ is absolutely continuous with respect to the corresponding Lebesgue measure
with Radon-Nikodym derivative k(n)μ ∈ L∞((Rd)n). Clearly, this condition excludes
Dirac measures, and hence the possibility to solve (1.2) by means of stochasticprocesses. Instead one can drop the mentioned above restrictions on the jumpkernel a and on the support of μt. In the present paper, we follow this way.
Until this time, there have been published only two papers [2,8] dealing withjump models on Γ. In [2], the approach based on essentially bounded correlationfunctions is applied to the model in which the jump kernel depend also on theconfiguration γ \ x in a specific way. In that paper, by means of the so calledOvcyannikov method [11], the evolution μ0 → μt is constructed for t ∈ [0, T ), withT < ∞ dependent on the kernel a. In the present paper, we consider the freecase (no dependence of a on γ), which allows us to employ semigroup methods andobtain the evolution μ0 → μt for all t ≥ 0.
2. Basic Notions and the Result
The main idea of the approach used in this paper is to obtain the evolution ofstates from the evolution of their correlation functions. This includes the followingsteps: (a) passing from problem (1.2) to the corresponding problem for correlation
functions; (b) obtaining k(n)μ0 =: k
(n)0 → k
(n)t ; (c) proving that, for each t > 0,
there exists a unique μt such that k(n)t is its correlation function for all n ∈ N. We
perform this steps in subsection 2.2. In subsection 2.1, we present some details ofthe method. Further information on the methods used in this work can be foundin [2,4–7].
2.1. Configuration spaces and correlation functions. By B(Rd) and Bb(Rd)we denote the set of all Borel and all bounded Borel subsets of Rd, respectively.The set of configurations Γ defined in (1.1) is equipped with the vague topology –the weakest topology which makes the maps
Γ � γ →∑x∈γ
f(x) ∈ R
continuous for all compactly supported continuous functions f : R → R. Thistopology can be completely and separably metrized, that turns Γ into a Polishspaces, see [1, 7]. By B(Γ) and P(Γ) we denote the Borel σ-field of subsets of Γand the set of all probability measures on B(Γ), respectively.
The set of finite configurations
(2.1) Γ0 =⊔
n∈N0
Γ(n),

16 JOANNA BARANSKA AND YURI KOZITSKY
is the disjoint union of the sets of n-particle configurations:
Γ(0) = {∅}, Γ(n) = {γ ∈ Γ : |γ| = n}, n ∈ N.
For n ≥ 2, Γ(n) can be identified with the symmetrization of the set
(2.2){(x1, . . . , xn) ∈
(Rd
)n: xi �= xj , for i �= j
},
which allows one to introduce the corresponding (Euclidean) topology on Γ(n).Then by (2.1) one defines also the topology on the whole Γ0: A ⊂ Γ0 is said tobe open if its intersection with each Γ(n) is open. This topology differs from thatinduced on Γ0 by the vague topology of Γ. At the same time, as a set Γ0 is inB(Γ). Thus, a function G : Γ0 → R is measurable as a function on Γ if and onlyif its restrictions to each Γ(n) are Borel functions. Clearly, these restrictions fullydetermine G. In view of (2.2), the restriction of G to Γ(n) can be extended to asymmetric function G(n) : (Rd)n → R, n ∈ N, such that
(2.3) G(γ) = G(n)(x1, . . . , xn), for γ = {x1, . . . , xn}.
It is convenient to complement (2.3) by putting G(∅) = G(0) ∈ R.
Definition 2.1. A measurable function G : Γ0 → R is said to have boundedsupport if the following holds: (a) there exists N ∈ N0 such that G(n) ≡ 0 for alln > N ; (b) there exists Λ ∈ Bb(Rd) such that, for all n ∈ N, G(n)(x1, . . . , xn) = 0whenever xj ∈ Rd \ Λ for some j = 1, . . . , n. By Bbs(Γ0) we denote the set of allsuch functions.
Let all G(n), n ∈ N, be bounded Borel functions and G be related to G(n) by(2.3). For such G, we then write∫
Γ0
G(γ)λ(dγ) = G(0) +∞∑
n=1
1
n!
∫(Rd)n
G(n)(x1, . . . xn)dx1 · · · dxn.(2.4)
This expression determines a σ-finite measure λ on Γ0, called the Lebesgue-Poissonmeasure. Then the formula in (1.7) can be written in the following way
(2.5)
∫Γ
(∑η�γ
G(η)
)μ(dγ) =
∫Γ0
G(η)kμ(η)λ(dη),
where the sum on the left-hand side runs over all finite sub-configurations of γ.
Like in (2.3), kμ : Γ0 → R is determined by its restrictions k(n)μ . Note that k
(0)μ ≡ 1
for all μ ∈ P(Γ).Prototype examples of measures with property k
(n)μ ∈ L∞((Rd)n) are the Pois-
son measures π� for which
(2.6) k(n)π�
(x1, . . . , xn) =
n∏j=1
�(xj), n ∈ N.
Here � ∈ L∞(Rd), and the case of constant � ≡ κ > 0 corresponds to the homoge-neous Poisson measure. Along with the spatial properties of correlation functions,it is important to know how do they depend on n. Having in mind (2.6) we saythat a given μ ∈ P(Γ) is sub-Poissonian if its correlation functions are such that
(2.7) k(n)μ (x1, . . . , xn) ≤ Cn,

FREE JUMP DYNAMICS IN CONTINUUM 17
holding for some C > 0, all n ∈ N, and Lebesgue-almost all (x1, . . . , xn) ∈ (Rd)n.Then a state with property (2.7) is similar to the Poisson states π� in which theparticles are independently scattered over Rd. At the same time, the increase of
k(n)μ as n! corresponds to the appearance of clusters in state μ. For the so called
continuum contact model, it is known [5] that, for any t > 0,
const · n!cnt ≤ k(n)t (x1, . . . , xn) ≤ const · n!Cn
t ,
where the left-hand inequality holds if all xi belong to a ball of small enough radius.Recall that by Bbs(Γ0) we denote the set of all G : Γ0 → R which have bounded
support, see Definition 2.1. For each such G and γ ∈ Γ, the expression
(2.8) (KG)(γ) :=∑η�γ
G(η)
is well-defined as the sum has finitely many terms only. Note that KG is B(Γ0)-measurable for each G ∈ Bbs(Γ0). Indeed, given G ∈ Bbs(Γ0), let N and Λ be asin Definition 2.1. Then
(KG)(γ) = G(0) +∑
x∈γ∩Λ
G(1)(x) + · · ·+∑
{x1,...xN}⊂γ∩Λ
G(N)(x1, . . . , xN ).
The inverse of (2.8) has the form
(2.9) (K−1F )(η) :=∑ξ⊂η
(−1)|η\ξ|F (ξ).
As was shown in [7], K and K−1 are linear isomorphisms between Bbs(Γ0) and theset of cylinder functions F : γ → R.
Let us now turn to the following analog of the classical moment problem: givena function k : Γ0 → R, which properties of k could guarantee that there existsμ ∈ P(Γ) such that k = kμ? The answer to this question is given by the followingstatement, see Theorems 6.1, 6.2 and Remark 6.3 in [7], in which
(2.10) B+bs(Γ0) := {G ∈ Bbs(Γ0) : (KG)(γ) ≥ 0, γ ∈ Γ}.
Proposition 2.2. Let k : Γ0 → R be such that: (a) k(0) ≡ 1 and for eachG ∈ B+
bs(Γ0) the following holds
(2.11) 〈〈G, k〉〉 :=∫Γ0
G(η)k(η)λ(dη) ≥ 0;
(b) there exists C > 0 such that each k(n), n ∈ N, satisfies ( 2.7). Then thereexists a unique μ ∈ P(Γ) such that k is its correlation function, i.e., it is theRadon-Nikodym derivative of the corresponding correlation measure χμ.
Note that B+bs(Γ0) contains not only positive functions, cf. (2.9). That is, the
positivity of k as in (2.11), which readily follows from (2.5), (2.8), and (2.10), is astronger property than the usual positivity.
2.2. The evolution equation. If we rewrite (2.5) in the form, cf. (2.8),∫Γ
(KG)(γ)μ(dγ) =
∫Γ0
G(η)kμ(η)λ(dη),

18 JOANNA BARANSKA AND YURI KOZITSKY
then the action of L on F in (1.5) can be transferred to G, and then to kμ, asfollows ∫
Γ
[L(KG)](γ)μ(dγ) =
∫Γ
[K(LG)](γ)μ(dγ)
=
∫Γ0
(LG)(η)kμ(η)λ(dη)
=
∫Γ0
G(η)(LΔ)kμ(η)λ(dη).
Thus, by (2.8) and (2.9), we see that
L = K−1LK,
and that LΔ is the adjoint of L with respect to the pairing in (2.11). Then theproblem in (1.4) is being transformed into the following one
(2.12)d
dtkt = LΔkt, kt|t=0 = k0 = kμ0
.
For a more general model of jumps in Rd, the calculations of L and LΔ wereperformed in [6, Section 4]. The peculiarity of our simple case is that the action ofboth these ‘operators’ is the same, and, in fact, the same as that in (1.5). That is,
LΔ = AΔ +BΔ,(2.13)
(AΔk)(η) = −α|η|k(η),
(BΔk)(η) =∑x∈η
∫Rd
a(x− y)k(η \ x ∪ y)dy, η ∈ Γ0.
So far, these are only informal expressions, like the one in (1.5), and our aim now isto define the corresponding linear operator in a Banach space, where we then solve(2.12). Note that in contrast to (1.5) the sum in the last line of (2.13) is finite,which shows the advantage of the approach we follow in this work. Note also thatthe action of both AΔ and BΔ on the elements of Bbs(Γ0) is well-defined.
In view of our basic assumption k(n)μ ∈ L∞((Rd)n), the space in question is
defined as follows: for a ϑ ∈ R and a function u : Γ0 → R such that u(n) ∈L∞((Rd)n) for all n ∈ N, we set
‖u‖ϑ,∞ = supn∈N0
eϑn‖u(n)‖L∞((Rd)n),
that can also be written in the form
(2.14) ‖u‖ϑ,∞ = ess supη∈Γ0|u(η)| exp(ϑ|η|).
By means of (2.14) we then define
Kϑ = {u : Γ0 → R : ‖u‖ϑ,∞ <∞},which is a real Banach space with the standard point-wise linear operations. Alongwith (2.14) we introduce the following norm of v : Γ0 → R, cf. (2.4),
(2.15) ‖v‖ϑ,1 =
∫Γ0
|v(η)| exp(−ϑ|η|)λ(dη),

FREE JUMP DYNAMICS IN CONTINUUM 19
and then
(2.16) Gϑ = {v : Γ0 → R : ‖v‖ϑ,1 <∞},which is also a real Banach space. Note that Kϑ is the topological dual to (2.16)with the pairing (2.11). To proceed further we need the following formula, see, e.g.,[5, Lemma 2.1], ∫
Γ0
(∫Rd
f(y, η)g(η)dy
)λ(dγ)(2.17)
=
∫Γ0
(∑x∈η
f(x, η \ x)g(η \ x))
λ(dη),
which holds for all appropriate functions f : Rd ×Γ0 → R and g : Γ0 → R. A moregeneral form of this identity is
(2.18)
∫Γ0
⎛⎝∑ξ⊂η
f(ξ)
⎞⎠ g(η)λ(dη) =
∫Γ0
∫Γ0
f(ξ)g(η ∪ ξ)λ( dξ)λ(dη).
Consider
(2.19) Gϑ = {v ∈ Gϑ : AΔv ∈ Gϑ},which is a dense linear subset of Gϑ. Now let us define in Gϑ linear operators Aϑ
and Bϑ by the expressions for AΔ and BΔ, respectively, given in (2.13). Namely,
the action of Aϑ and Bϑ on the elements of Gϑ is given by the right-hand sides of
the second and third expressions in (2.13), respectively. Clearly Aϑ with domain
Gϑ is a closed linear operator in Gϑ. Moreover, by (2.17) we get
‖BΔv‖ϑ,1 ≤∫Γ0
∫Rd
∑x∈η
a(x− y)|v(η \ x ∪ y)| exp(−ϑ|η|)λ(dη)dy
=
∫Γ0
∫Rd
∑x∈η
a(x− y)|v(η)| exp(−ϑ|η|)λ(dη)dy(2.20)
= α
∫Γ0
|η||v(η)| exp(−ϑ|η|)λ(dη) = ‖AΔv‖ϑ,1,
where we have taken into account (1.6) and twice used (2.17). Thus, (Bϑ, Gϑ) is
also well-defined, which allows us to define the sum Lϑ = Aϑ+ Bϑ with domain Gϑ.It can readily be shown that (Lϑ, Gϑ) is closed, and its action on the the elements
of Gϑ is
(2.21) (Lϑv)(η) = −α|η|v(η) +∫Rd
∑x∈η
a(x− y)v(η \ x ∪ y)dy.
By (2.17), for v ∈ Gϑ and u ∈ Bbs(Γ0), we get
(2.22) 〈〈Aϑv, u〉〉 = 〈〈v,AΔu〉〉, 〈〈Bϑv, u〉〉 = 〈〈v,BΔu〉〉,that is, the action of the dual operators is again given by the same expressions
(2.13). We use this fact to define the adjoint operator L∗ϑ. Its domain is
(2.23) Dϑ = {u ∈ Kϑ : ∀v ∈ Gϑ ∃w ∈ Kϑ 〈〈Lϑv, u〉〉 = 〈〈v, w〉〉}.

20 JOANNA BARANSKA AND YURI KOZITSKY
Then the action of L∗ϑ on the elements of Dϑ ⊂ Kϑ is again given by (2.13) or by
the right-hand side of (2.21). By construction, the operator (L∗ϑ,Dϑ) is closed. Let
Qϑ be the closure of Dϑ in Kϑ. Note that Qϑ is a proper subset of Kϑ. By Lϑ we
define the part of L∗ϑ in Qϑ. That is, it is the restriction of L∗
ϑ to the set
(2.24) Dϑ := {u ∈ Dϑ : L∗
ϑu ∈ Qϑ}.
Lemma 2.3. The operator (Lϑ ,D
ϑ ) is the generator of a C0-semigroup of
bounded linear operators Sϑ (t) : Qϑ → Qϑ, t ≥ 0. Furthermore, for each ϑ′ > ϑ,
it follows that Kϑ′ ⊂ Dϑ .
The proof of the lemma is given in the next section. Now we turn to theproblem in (2.12). By the very definition of L
ϑ , its action on the elements of Dϑ
is given by the right-hand side of (2.21). Then the version of (2.12) in Qϑ ⊂ Gϑ is
(2.25)d
dtkt = L
ϑ kt, kt|t=0 = k0 ∈ Dϑ .
Definition 2.4. By the classical global solution of the problem in (2.25) wemean a function [0,+∞) � t → kt ∈ Qϑ which is continuously differentiable on[0,+∞), lies in D
ϑ , and satisfies (2.25).
Theorem 2.5. For each ϑ ∈ R and k0 ∈ Dϑ , the problem in ( 2.12) has a
unique global classical solution kt ∈ Qϑ ⊂ Kϑ given by the formula
kt = Sϑ (t)k0, t > 0,
where Sϑ is as in Lemma 2.3. This, in particular, holds if k0 ∈ Kϑ′ for some
ϑ′ > ϑ. Furthermore, if k0 is the correlation function of some μ0 ∈ P(Γ), then,for each t > 0, there exists a unique μt ∈ P(Γ) such that kt is the the correlationfunction of this μt.
Note that in [2] where the jumps were not free, the evolution Kϑ′ � k0 →kt ∈ Kϑ was obtained on a bounded time interval [0, T ) with T dependent on thedifference ϑ′ − ϑ.
3. The Proofs
We first prove Lemma 2.3 by means of a statement, which we present here.Let X be a Banach space with a cone of positive elements, X+, which is convex,generating (X = X+ −X+), and proper (X+ ∩ (−X+) = {0}). Let also the normof X be additive on X+, that is, ‖x + x′‖X = ‖x‖X + ‖x′‖X for x, x′ ∈ X+.Then there exists a positive (hence bounded) linear functional ϕ on X such thatϕ(x) = ‖x‖X for each x ∈ X+. Let now X1 ⊂ X be a dense linear subset equippedwith its own norm in which it is also a Banach space, and let the embeddingX1 ↪→ X be continuous. Assume also that the norm of X1 is additive on thecone X+
1 := X1 ∩ X+, and ϕ1 is the functional with property ϕ1(x) = ‖x‖X1for
each x ∈ X+1 . Let S := {S(t)}t≥0 be a C0-semigroup of bounded linear operators
S(t) : X → X. It is called sub-stochastic (resp. stochastic) if S(t) : X+ → X+ and‖S(t)‖X ≤ 1 (resp. ‖S(t)‖X = 1) for all t > 0. Suppose now that (A0, D(A0)) bethe generator of a sub-stochastic semigroup S0 on X. Set S0(t) = S0(t)|X1
, t > 0,and assume that the following holds:
(a) for each t > 0, S0(t)X1 → X1;(b) S0 := {S0(t)}t≥0 is a C0-semigroup on X1.

FREE JUMP DYNAMICS IN CONTINUUM 21
Under these conditions, A0 – the generator of S0, is the part of A0 in X1, see[3, Proposition II.2.3]. That is, A0 is the restriction of A0 to, cf. (2.24),
D(A0) := {x ∈ D(A0) ∩X1 : A0x ∈ X1}.The next statement is an adaptation of Proposition 2.6 and Theorem 2.7 of [10].
Proposition 3.1. Let conditions (a) and (b) given above hold, and −A0 be apositive linear operator in X. Let also B be positive and such that its domain in Xcontains D(A0) and
(3.1) ϕ((A0 +B)x) = 0, x ∈ D(A0) ∩X+.
Additionally, suppose that B : D(A0)→ X1 and the following holds
(3.2) ϕ1((A0 +B)x) ≤ Cϕ1(x)− ε‖A0x‖X , x ∈ D(A0) ∩X+,
for some positive constants C and ε. Then (A,D(A)) – the closure of (A0 +B,D(A0)), is the generator of a stochastic semigroup S on X, which leaves X1
invariant. That is, for each t, S(t) : X1 → X1.
3.1. Proof of Lemma 2.3.
Proof. The space Gϑ possesses all the properties of the space X assumedabove. The corresponding functional is, cf. (2.15),
(3.3) ϕ(v) =
∫Γ0
v(η) exp(−ϑ|η|)λ(dη).
Then (Aϑ, Gϑ), see (2.19) and (2.22), generates the sub-stochastic C0-semigroup S0
of multiplication operators defined by the formula
(S0(t)v)(η) = exp(−α|η|)v(η).Now let β : N0 → [0,+∞) be such that β(n)→ +∞ as n→ +∞. Set
‖v‖ϑ,β =
∫Γ0
|v(ϑ)|β(|η|) exp(−ϑ|η|)λ(dη)
ϕβ(v) =
∫Γ0
v(ϑ)β(|η|) exp(−ϑ|η|)λ(dη),
Gϑ,β = {v ∈ Gϑ,1 : ‖v‖ϑ,β < +∞}.
Then clearly S0 : Gϑ,β → Gϑ,β , and ‖S0(t)v − v‖ϑ,β → 0 as t ↓ 0 by the dominatedconvergence theorem. Thus, both conditions (a) and (b) above are satisfied. Next,
let Bϑ be as in (2.22), (2.13). Then (Lϑ, Gϑ), see (2.21), is closed. As in (2.20), by(2.17) and (3.3) we obtain
ϕ(Lϑv) = −α
∫Γ0
|η|v(η) exp(−ϑ|η|)λ(dη)
+
∫Γ0
∫Rd
∑x∈η
a(x− y)v(η \ x ∪ y) exp(−ϑ|η|)λ(dη)dy
= 0.

22 JOANNA BARANSKA AND YURI KOZITSKY
That is, the condition in (3.1) holds in our case. Moreover, again by (2.17) weobtain that
ϕβ(Lϑv) = 0,
hence, in our case (3.2) is satisfied if, for some C > 0, the following holds
β(n) ≥ Cn, n ∈ N.
Then we choose, e.g., β(n) = n and obtain by Proposition 3.1 that (Lϑ, Gϑ) gener-ates a stochastic C0-semigroup on Gϑ, which we denote by Sϑ. By the constructionperformed in (2.23) and (2.24) and by [9, Theorem 10.4, page 39], the semigroup
in question is obtained as the restriction of the adjoint semigroup S∗ϑ to Qϑ. �
3.2. Proof of Theorem 2.5.
Proof. The proof of the first part Theorem 2.5 readily follows by Lemma 2.3and [9, Theorem 1.3, page 102]. So, it remains to prove that, for each t > 0,the solution kt is the correlation function for a unique μt ∈ P(Γ). According toProposition 2.2, to this end we have to show that, for each G ∈ B+
bs(Γ0) and allt > 0,
(3.4) 〈〈G, kt〉〉 = 〈〈G,Sϑ (t)k0〉〉 ≥ 0,
whenever this property holds for t = 0. The proof of (3.4) follows along the followingline of arguments. For a Λ ∈ Bb(Rd), we let
ΓΛ = {γ ∈ Γ : γ ⊂ Λ},which is a Borel subset of Γ such that ΓΛ ⊂ Γ0, see (1.1) and (2.1). Hence,ΓΛ ∈ B(Γ0). Next, by μΛ
0 we denote the projection of μ0 on ΓΛ, i.e., μΛ0 := μ0 ◦p−1
Λ ,where pΛ(γ) = γ ∩ Λ is the projection of Γ onto ΓΛ. It can be shown that μΛ
0 isabsolutely continuous with respect to the Lebesgue-Poisson measure λ. Let RΛ
0 be
its Radon-Nikodym derivative. For N ∈ N, we also set RN,Λ0 (η) = RΛ
0 (η)IN (η),where IN (η) = 1 if |η| ≤ N and IN (η) = 0 otherwise. By this construction,
RN,Λ0 ∈ Gθ for each θ ∈ R, see (2.16). Thus, we can get
(3.5) RN,Λt = Sθ(t)R
N,Λ0 , t > 0,
where Sθ is the semigroup constructed in the proof of Lemma 2.3. Then RN,Λt (η) ≥
0 and ‖RN,Λt ‖θ,1 ≤ 1. Set
(3.6) qN,Λt (η) =
∫Γ0
RN,Λt (η ∪ ξ)λ(dξ).
By (2.8), (2.9), and (2.18) for G ∈ B+bs(Γ0), we then get
(3.7) 〈〈G, qN,Λt 〉〉 = 〈〈KG,RN,Λ
t 〉〉 ≥ 0.
On the other hand, by (3.6) for t = 0 we have
0 ≤ qN,Λ0 (η) ≤
∫Γ0
RΛt (η ∪ ξ)λ(dξ) = kμ0
(η)IΓΛ(η) ≤ kμ0
(η),
where IΓΛis the corresponding indicator function. Hence, qN,Λ
0 ∈ Dϑ and we get
(3.8) kN,Λt = S
ϑ (t)qN,Λ0 , t > 0.

FREE JUMP DYNAMICS IN CONTINUUM 23
As in [2, Appendix], one can show that
(3.9) liml→+∞
limn→+∞
〈〈G, kNl,Λn
t 〉〉 = 〈〈G, kt〉〉,
for certain increasing sequences {Nl}l∈N and {Λn}n∈N such that Nl → +∞ andΛn → Rd. In (3.9), kt is the same as in (3.4). Thus, by (3.7) and (3.9), we canobtain (3.4) by proving that
(3.10) 〈〈G, qN,Λt 〉〉 = 〈〈G, kN,Λ
t 〉〉, t > 0.
Set
φ(t) = 〈〈G, qN,Λt 〉〉, ψ(t) = 〈〈G, kN,Λ
t 〉〉.By (3.8) as well as by (2.25) and (2.23) we then get
(3.11) ψ′(t) = 〈〈LϑG, kN,Λt 〉〉,
which makes sense since elements of Bbs(Γ0) clearly belong to the domain of Lϑ for
each ϑ ∈ R. Moreover, the operator Lϑ, see (2.21), can be defined as a boundedoperators acting from Gϑ′ to Gϑ, for each ϑ′ < ϑ. Hence, one can define also its
powers Lnϑ : Gϑ′ → Gϑ such that, see [2, eq. (3.21), page 1039],
(3.12) ‖Lnϑ‖ϑ′ϑ ≤
(2αn
e(ϑ− ϑ′)
)n
,
where ‖ · ‖ϑ′ϑ is the corresponding operator norm. Since Bbs(Γ0) ⊂ Gϑ′ for each ϑ′,by the latter estimate we conclude that ψ can be continued to a function analyticin some neighborhood of the point t = 0. Its derivatives are
(3.13) ψ(n)(0) = 〈〈LnϑG, qN,Λ
0 〉〉, n ∈ N.
On the other hand, by (3.5) and (3.6), as well as by the fact that the action of all
operators like Lϑ on their domains is the same as that in (2.13), we obtain
φ′(t) = 〈〈LϑG, qN,Λt 〉〉,
cf. (3.11) and (3.12), which yields that also φ can be continued to a functionanalytic in some neighborhood of the point t = 0, with the derivatives, cf (3.13),φ(n)(0) = ψ(n)(0). These facts readily yield (3.10), which completes the proof. �
References
[1] S. Albeverio, Yu. G. Kondratiev, and M. Rockner, Analysis and geometry on configuration
spaces, J. Funct. Anal. 154 (1998), no. 2, 444–500, DOI 10.1006/jfan.1997.3183. MR1612725(99d:58179)
[2] Christoph Berns, Yuri Kondratiev, Yuri Kozitsky, and Oleksandr Kutoviy, Kawasaki dynam-ics in continuum: micro- and mesoscopic descriptions, J. Dynam. Differential Equations 25(2013), no. 4, 1027–1056, DOI 10.1007/s10884-013-9328-z. MR3138156
[3] Klaus-Jochen Engel and Rainer Nagel, One-parameter semigroups for linear evolution equa-tions, Graduate Texts in Mathematics, vol. 194, Springer-Verlag, New York, 2000. Withcontributions by S. Brendle, M. Campiti, T. Hahn, G. Metafune, G. Nickel, D. Pallara, C.Perazzoli, A. Rhandi, S. Romanelli and R. Schnaubelt. MR1721989 (2000i:47075)
[4] Dmitri Finkelshtein, Yuri Kondratiev, and Oleksandr Kutoviy, Semigroup approach to birth-and-death stochastic dynamics in continuum, J. Funct. Anal. 262 (2012), no. 3, 1274–1308,DOI 10.1016/j.jfa.2011.11.005. MR2863863 (2012m:60181)
[5] Dmitri Finkelshtein, Yuri Kondratiev, and Oleksandr Kutoviy, Individual based model withcompetition in spatial ecology, SIAM J. Math. Anal. 41 (2009), no. 1, 297–317, DOI10.1137/080719376. MR2505861 (2011a:60306)

24 JOANNA BARANSKA AND YURI KOZITSKY
[6] Dmitri L. Finkelshtein, Yuri G. Kondratiev, and Maria Joao Oliveira, Markov evolutions andhierarchical equations in the continuum. I. One-component systems, J. Evol. Equ. 9 (2009),no. 2, 197–233, DOI 10.1007/s00028-009-0007-9. MR2511551 (2010k:60288)
[7] Yuri G. Kondratiev and Tobias Kuna, Harmonic analysis on configuration space. I. Generaltheory, Infin. Dimens. Anal. Quantum Probab. Relat. Top. 5 (2002), no. 2, 201–233, DOI10.1142/S0219025702000833. MR1914839 (2003c:82020)
[8] Kondratiev, Y., Lytvynov, E., and Rockner, M.: Non-equilibrium stochastic dynamics in con-
tinuum: the free case. Condens. Matt. Phys., 11, 701–721 (2008). DOI:10.5488/CMP.11.4.701[9] A. Pazy, Semigroups of linear operators and applications to partial differential equations,
Applied Mathematical Sciences, vol. 44, Springer-Verlag, New York, 1983. MR710486(85g:47061)
[10] H. R. Thieme and J. Voigt, Stochastic semigroups: their construction by perturbation andapproximation, Positivity IV—theory and applications, Tech. Univ. Dresden, Dresden, 2006,pp. 135–146. MR2239544 (2007g:47065)
[11] Francois Treves, Ovcyannikov theorem and hyperdifferential operators, Notas de Matematica,No. 46, Instituto de Matematica Pura e Aplicada, Conselho Nacional de Pesquisas, Rio deJaneiro, 1968. MR0290202 (44 #7386)
Institute of Mathematics, Maria Curie-Sk�lodowska University, 20-031 Lublin, Poland
E-mail address: [email protected]
Institute of Mathematics, Maria Curie-Sk�lodowska University, 20-031 Lublin, Poland
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13176
Instabilities in Kinetic Theory and Their Relationshipto the Ergodic Theorem
Jonathan Ben-Artzi
Abstract. A method for obtaining simple criteria for instabilities in kinetictheory is described and outlined, specializing in the relativistic Vlasov-Maxwellsystem. An important ingredient of the method is an analysis of a one-parameter family of averaging operators that naturally appears in the course ofthe analysis. This leads to a connection with similar problems in ergodic the-ory. In particular, the rate of convergence in the ergodic theorem is a commonfeature which is studied in a simplified setting.
1. Introduction and main results
1.1. Overview. Over the last decade, significant progress has been made inthe mathematical analysis of linear and nonlinear stability in collisionless kinetictheory. This paper continues a well-established sequence of results concerned withlinear instabilities in which the self-adjoint form of the problem is exploited inorder to reduce the search for unstable modes to the search of certain resonances,see for instance [1,7,12,13]. More recently, there has been significant progress inthe understanding of nonlinear stability/instability by using a certain continuumof conservation laws, called Casimirs [10, 11]. Finally, perhaps the most famousrecent result in this context is the rigorous verification of the phenomenon knownas “Landau damping” [14].
We are interested in linear instabilities of the Vlasov-Maxwell system describingthe evolution of plasmas that are assumed to be colliosnless (either due to beingextremely dilute, or due to being extremely hot where the time scales are such thatcollisions can be neglected).
1.2. The relativistic Vlasov-Maxwell system. The Vlasov equation is
(1.1)∂f±
∂t+ v · ∇xf
± + F± · ∇vf± = 0,
where the two functions f± = f±(t, x, v) ≥ 0 represent the density of positivelyand negatively charged particles, respectively, that at time t ∈ [0,∞) are located
at the point x ∈ Rd and have momentum v ∈ Rd. In addition, v = v/√1 + |v|2
is the relativistic velocity (the speed of light is taken as c = 1 for simplicity) and
2010 Mathematics Subject Classification. Primary 35P15; Secondary 82B40, 47A35, 37A30.
c©2015 J. Ben-Artzi
25

26 JONATHAN BEN-ARTZI
F± = F±(t, x, v) is the Lorentz force, given by
(1.2) F± = ±(E+Eext + v × (B+Bext)
)and providing the coupling to Maxwell’s equations of electromagnetism
(1.3) ∇ ·E = ρ, ∇ ·B = 0, ∇×E = −∂B
∂t, ∇×B = j+
∂E
∂t.
In the above, E = E(t, x) and B = B(t, x) are the electric and magnetic fields dueto the plasma itself and Eext = Eext(t, x), Bext = Bext(t, x) are the externallyinduced fields. In addition, ρ = ρ(t, x) is the charge density and j = j(t, x) is thecurrent density, which are defined as
(1.4) ρ =
∫(f+ − f−) dv and j =
∫v(f+ − f−) dv.
We note that we have taken all constants that typically appear in these equations(such as the particle masses) to be 1 to keep notation simple. External fields onlycomplicate notation, and will therefore be omitted in what follows. Since we areinterested in instabilities of equilibria, we define our notion of instability:
Definition 1.1 (Linear instability). We say that a given equilibrium f0,±(x, v)is linearly unstable, if the system linearized around it has a purely growing modesolution of the form
(1.5)(et/T f±(x, v), et/TE(x), et/TB(x)
), T > 0.
1.3. The 1.5-dimensional case. We restrict our attention to a lower dimen-sional version of the RVM system where certain symmetries are assumed, yet allthe main physical ingredients of the problem are kept intact. In particular, thefollowing is the lowest dimensional setting that allows for a nontrivial magneticfield. Spatially, all quantities are assumed to only depend upon the x1 variable,while in the momentum variable dependence is possible upon v1 and v2. Hence wewrite x instead of x1 for brevity, and v = (v1, v2). Correspondingly, the electro-magnetic fields have the form E = (E1, E2, 0) and B = (0, 0, B). The RVM systemis transformed into the following system of scalar equations:
∂tf± + v1∂xf
± ± (E1 + v2B)∂v1f± ± (E2 − v1B)∂v2f
± = 0(1.6a)
∂tE1 = −j1(1.6b)
∂tE2 + ∂xB = −j2(1.6c)
∂tB = −∂xE2(1.6d)
∂xE1 = ρ.(1.6e)
For simplicity, throughout this paper we shall assume periodicity in the x variable,with period P . Next, we state our main instability result. The main significanceof this result is in providing a relatively simple criterion for checking for linearinstability: one only has to have knowledge of the spectra of certain Schrodingeroperators acting on the spatial variable, not the entire phase-space variables. Thetheorem uses several definitions that are too technical to specify here, and thereforeonly appear later.
Theorem 1.2. Let f0,±(x, v) be an equilibrium of the 1.5-dimensional RVMsystem (1.6) satisfying the integrability condition (1.12) (see below). There existtwo self-adjoint Schrodinger operators A∞
1 and A∞2 , a bounded operator B∞ and a

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 27
number l∞ (all defined below in (2.8)) acting only in the spatial variable (and notthe momentum variable) such that the equilibrium is linearly unstable if
(i) only the constant functions are in kerA∞1
(ii) the following inequality holds:
(1.7) neg(A∞
2 + B∞ (A∞1 )−1 (B∞)∗
)> neg (A∞
1 ) + neg(−l∞),
where neg(A) is the number of negative eigenvalues of the self-adjointoperator A, and neg(−l∞) = 1 (resp. 0) if l∞ > 0 (resp. l∞ ≤ 0).
1.4. The equilibrium. Nontrivial equilibria(f0,±(x, v), E0
1(x), E02(x), B
0(x))
of (1.6) are guaranteed to exist due to [6]. We shall always assume that f0,± ≥ 0are continuously differentiable and that E0
2 ≡ 0. Define the energy e± and themomentum p±, respectively, by the expressions
(1.8) e± = 〈v〉 ± φ0(x), p± = v2 ± ψ0(x),
where φ0 and ψ0 are the equilibrium electric and magnetic potentials, satisfying
(1.9) ∂xφ0 = −E0
1 , ∂xψ0 = B0.
It is well-known that e±, p± are conserved along trajectories of the linearized Vlasovoperators
(1.10) D± = v · ∇x + F0,± · ∇v =(v,F0,±)
· ∇x,v.
Using Jeans’ theorem [8] we replace the coordinates (x, v) by (e±, p±) and writethe equilibrium distributions as
(1.11) f0,±(x, v) = μ±(e±, p±).
We assume that there exist weight functions w± = c(1 + |e±|)−α with α > 2 andc > 0 such that the integrability condition
(1.12)
(∣∣∣∣∂μ±
∂e
∣∣∣∣+ ∣∣∣∣∂μ±
∂p
∣∣∣∣) (e±, p±) < w±(e±)
holds. This ensures that∫ (|μ±
e |+ |μ±p |
)dxdv <∞, where we have used shorthand
notation for the partial derivatives with respect to the first and second variablesrespectively (this notation will appear throughout this paper). Moreover, we definethe following functional spaces that include functions that do not necessarily decay
L2± =
{h(x, v)
∣∣∣∣∣ h is P -periodic in x, ‖h‖2± :=
∫ P
0
∫R2
|h|2w± dv dx <∞}
.
The norm and inner-product in L2± are denoted ‖ · ‖L2
±and 〈·, ·〉L2
±, respectively.
In addition, we define
L2P = {h is P -periodic and square integrable on [0, P ]}
as well as the spaces L2P,0 of functions in L2
P of zero mean value (over a period),
H2P of functions whose first and second distributional derivatives are in L2
P andH2
P,0 of functions in H2P of zero mean value. The norm and inner-product in L2
P
are denoted ‖ · ‖L2Pand 〈·, ·〉L2
P, respectively.

28 JONATHAN BEN-ARTZI
1.5. Seeking a uniform ergodic theorem. In the course of the proof ofTheorem 1.2, we encounter an application of the ergodic theorem where a detailedknowledge of convergence rates could be advantageous. This can be seen in thedefinition of the ergodic averaging operators QT
± (Equation (2.5) below) whoseproperties are discussed in Lemma 5.2 below. These averages are taken along thetrajectories of D±. Since a uniform rate of convergence does not exist in general,we present methods for obtaining such rates on certain subspaces.
Since the trajectories of D± (which represent the flow of the linearized RVMsystem) are quite complicated, we begin by studying first the simplest case of a1D flow on L2 and weighted-L2 spaces. Generalizations of these results to higherdimensional shear flows have recently been published [3], and further generalizationsto more general flows [5] are in preparation.
1. L2 case. We consider the self-adjoint operator
(1.13) H = −id
dx: H1(R) ⊂ L2(R)→ L2(R),
and we define the space L2,σ(R) as
(1.14) L2,σ(R) =
{f : C→ R
∣∣∣ ‖f‖2L2,σ(R) :=
∫(1 + x2)σ|f(x)|2 dx <∞
}.
Then we have:
Theorem 1.3 (Uniform ergodic theorem – L2 case). For σ > 12 , the self-adjoint
operator H = −i ddx satisfies
(1.15) limT→∞
1
2T
∫ T
−T
eitHdt = 0
in the uniform operator topology on B(L2,σ(R), L2,−σ(R)).
2. Weighted-L2 case. In the weighted case the result is more interesting, as theconstant functions are part of our functional space. We let 0 < w ∈ L1(R)∩L∞(R)and define the weighted space
(1.16) L2w(R) =
{f : C→ R
∣∣∣ ‖f‖2L2w(R) :=
∫|f |2w <∞
}.
On this space, the operator H is no longer symmetric. However, the operator
(1.17) Hw = − i
w
d
dx: L2
w(R)→ L2w(R)
is. Self-adjointness, however, is less straightforward. Therefore we shall first prove:
Theorem 1.4. The operator Hw : Dα ⊂ L2w(R) → L2
w(R) is essentially self-adjoint, where for a fixed α ∈ C with |α| = 1
Dα =
{f ∈ L2
w(R)∣∣∣ Hwf ∈ L2
w(R), limx→∞
f(x) = α limx→−∞
f(x)
}.
We designate as Hαw its unique self-adjoint extension.
With this statement at hand, we can now present a new uniform ergodic theo-rem:

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 29
Theorem 1.5 (Uniform ergodic theorem – weighted-L2 case). The convergence
limT→∞
1
2T
∫ T
−T
eitHαw dt = P
holds in the uniform operator topology on B(L2w(R), L
2w(R)) for each |α| = 1, where
P is the orthogonal projection onto the kernel of Hαw.
1.6. Outline of the paper. Our strategy for proving Theorem 1.2 is to firstmake the ansatz that the linearized Vlasov equation is linearly unstable, as definedin (1.5). This provides us with a family of equations for f± depending upon theparameter T > 0. This allows us to find expressions for f± (again, depending on T )which we substitute into Maxwell’s equations via the charge and current densities.We thus obtain a one-parameter family of self-adjoint systems of equations (in thespatial variable only) depending upon the parameter T . We must show that thisfamily has a solution for some T > 0. This is done in Section 2. In Section 3, we usethe self-adjointness of this family, as well as continuity properties of its spectrum(if such exist) in order to track its eigenvalues as T varies from 0 to +∞. Under theconditions of Theorem 1.2 we find an eigenvalue crossing through 0, which justifiesthe ansatz. The most difficult step in the proof, which is merely sketched in theform of Theorem 3.4, is closely related to the ergodic theorem, and, specifically, tothe non-existence of a rate of convergence for ergodic averages. In Section 4 weconsider this problem, and exhibit two instances where a uniform ergodic theorem(that is, an ergodic theorem with a rate) can be shown to hold. This presents a firststep towards more robust results in this direction. Finally, in Section 5 we gathersome technical lemmas.
2. An equivalent self-adjoint problem
2.1. Reformulation of the problem. Linearizing the Vlasov equation (1.1),we obtain
(2.1)∂f±
∂t+ v · ∇xf
± + F0,± · ∇vf± = −F± · ∇vf
0,±,
which, after making the ansatz that the time dependence is as in (1.5), becomes
(2.2)1
Tf± + v · ∇xf
± + F0,± · ∇vf± = −F± · ∇vf
0,±.
The right hand side of this equation includes the perturbed Lorentz forces F± =± (E+ v ×B) which we want to express in terms of the electromagnetic potentialsφ and ψ. Using Maxwell’s equations, and the ansatz (1.5) to replace time derivativesby 1
T , we obtain the expressions
B = ∂xψ, E2 = − 1
Tψ, E1 = −∂xφ−
1
Tb.
Above, b ∈ R is simply the mean value of E1 over a period, and is an artifact dueto the periodicity we have introduced. Hence (2.2) becomes
(2.3)
(1
T+D±
)f± = ±μ±
e v1
(∂xφ+
1
Tb
)± μ±
p v1∂xψ ±1
T
(μ±e v2 + μ±
p
)ψ
where the operators D± are given in (1.10). There are two parallel approaches forinverting this equation in order to obtain an expression for f±. In the first, which

30 JONATHAN BEN-ARTZI
can be found in [1], we integrate (2.3) along the trajectories (X±(s;x, v), V ±(s;x, v))of the vectorfields D± in phase space, which satisfy
X± = V ±1 ,
V ±1 = ±E0
1 ± V ±2 B0(X±),
V ±2 = ∓V ±
1 B0(X±),
with the initial conditions(X±(0;x, v), V ±(0;x, v)
)= (x, v).
Another point of view, presented in [4], is to apply the resolvents of D±, which areskew-adjoint differential operators. In both cases, the expressions obtained are
(2.4) f±(x, v) = ±μ±e φ(x)± μ±
p ψ(x)∓ μ±e QT
± (φ− v2ψ − bv1)
where QT± : L2
± → L2± are the ergodic averaging operators given by
(2.5) (QT±k)(x, v) =
1
T
∫ 0
−∞es/T k
(X±(s;x, v), V ±(s;x, v)
)ds.
Substituting (2.4) into Maxwell’s equations, we obtain the self-adjoint system ofequations
−AT1 φ+ BTψ + CT b = 0(
BT)∗
φ+AT2 ψ −DT b = 0(
CT)∗
φ−(DT
)∗ψ − P
(T−2 − lT
)b = 0
(2.6)
where
AT1 h = −∂2
xh−(∑
±
∫μ±e dv
)h+
∑±
∫μ±e QT
±h dv,
AT2 h = −∂2
xh+ T−2h−(∑
±
∫v2μ
±p dv
)h−
∑±
∫μ±e v2Q
T±(v2h) dv,
BTh =
(∑±
∫μ±p dv
)h+
∑±
∫μ±e QT
±(v2h) dv,
CT b = b∑±
∫μ±e QT
± (v1) dv,
DT b = b∑±
∫v2μ
±e QT
± (v1) dv,
lT =1
P
∑±
∫ P
0
∫v1μ
±e QT
± (v1) dv dx.
The detailed derivation of this system from Maxwell’s equations may be found in[1]. A nontrivial solution of (2.6) for some 0 < T < +∞ verifies the ansatz (1.5)and implies the existence of a growing mode. For brevity, we write (2.6) as
(2.7) MT
⎛⎝ φψb
⎞⎠ = 0.

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 31
The properties of all operators introduced here shall be collectively discussed inSection 5. Primarily, we care about Lemma 5.6 describing the properties of MT .Our strategy is to prove Theorem 1.2 by showing that (2.7) has a nontrivial solutionfor some 0 < T < +∞ by tracking the spectrum of MT as T varies from 0 to +∞,and seeking an eigenvalue that crosses through 0. For this, the self-adjointness ofMT for all T ≥ 0 is crucial. In addition, we need to understand the form of MT
(and therefore all other operators) for T = +∞. In particular, the ergodic averagesQT
± converge strongly, as T → +∞, to the projection operators Q∞± defined as (see
Lemma 5.2 below for a precise statement):
Definition 2.1. We define Q∞± to be the orthogonal projections of L2
± ontokerD±.
Accordingly, we define
A∞1 h = −∂2
xh−(∑
±
∫μ±e dv
)h+
∑±
∫μ±e Q∞
± h dv,
A∞2 h = −∂2
xh+ T−2h−(∑
±
∫v2μ
±p dv
)h−
∑±
∫μ±e v2Q
∞± (v2h) dv,
B∞h =
(∑±
∫μ±p dv
)h+
∑±
∫μ±e Q∞
± (v2h) dv,
l∞ =1
P
∑±
∫ P
0
∫v1μ
±e Q∞
± (v1) dv dx.
(2.8)
3. Tracking the spectrum of MT and finding a growing mode
As described above, our strategy for finding a value of 0 < T < +∞ forwhich MT has a nontrivial kernel is to “track” its spectrum as T varies from0 to +∞ and find an eigenvalue crossing through 0. As we state precisely inLemma 5.6, (0,∞) � T → MT is continuous in the uniform operator topology.However, the limit limT→∞MT = M∞ is only guaranteed to exist in the strongtopology. A major obstacle is that strong continuity does not guarantee continuityof the spectrum as a set [9, VIII-§1.3]. We therefore proceed by first solving anapproximate problem set in a finite-dimensional subspace.
3.1. The truncation. We define the following two families of finite-dimensionalorthogonal projection operators:
Pn = the orthogonal projection onto the eigenspace associated
with the first n eigenvalues (counting multiplicity) of A∞1 ,
(3.1)
and
Qn = the orthogonal projection onto the eigenspace associated
with the first n eigenvalues (counting multiplicity) of A∞2 .
(3.2)
Then we define the truncated matrix operator to be
(3.3) MTn =
⎛⎝ −AT1,n BT
n CTn(BTn
)∗ AT2,n −DT
n(CTn
)∗ −(DT
n
)∗ −P(T−2 − lT
)⎞⎠

32 JONATHAN BEN-ARTZI
where
AT1,n = PnAT
1 Pn AT2,n = QnAT
2 Qn
BTn = PnBTQn CTn = PnCT DT
n = QnDT .
When T = +∞, the truncated matrix operator becomes
(3.4) M∞n =
⎛⎝ −A∞1,n B∞
n 0(B∞
n )∗ A∞2,n 0
0 0 Pl∞
⎞⎠3.2. T small. For small values of T , the analysis is rather simple due to the
appearance of the terms T−2. We have
Lemma 3.1. There exists T∗ > 0 such that for any n ∈ N and any T < T∗,MT
n has exactly n+ 1 negative eigenvalues.
Proof. Since MTn is a symmetric mapping on a 2n+ 1-dimensional subspace
of H2P,0 ×H2
P × R, it has 2n+ 1 real eigenvalues. Letting ψ ∈ H2P , we have
(3.5)
⟨MT
n
⎛⎝ 0ψ0
⎞⎠ ,
⎛⎝ 0ψ0
⎞⎠⟩L2
P×L2P×R
=⟨AT
2 Qnψ,Qnψ⟩L2
P
> 0
for all T < T by Lemma 5.3. This implies thatMTn is positive definite on a subspace
of dimension n, and, therefore it has at least n positive eigenvalues. Similarly, wenow show that there exists a subspace of dimension n+1 on which MT
n is negativedefinite. Let (φ, 0, b) ∈ H2
P,0 ×H2P × R and consider⟨
MTn
⎛⎝ φ0b
⎞⎠ ,
⎛⎝ φ0b
⎞⎠⟩L2
P×L2P×R
=(3.6)
−⟨AT
1 Pnφ, Pnφ⟩L2
P
+ 2⟨CT b, Pnφ
⟩L2
P
− P (T−2 − lT )b2.
We estimate the second term:
2∣∣∣⟨CT b, Pnφ
⟩L2
P
∣∣∣ ≤ 2∥∥CT b∥∥
L2P
‖Pnφ‖L2P≤
∥∥CT b∥∥2L2
P
ε2+ ε2 ‖Pnφ‖2L2
P.
Letting ε2 = T , we have⟨MT
n
⎛⎝ φ0b
⎞⎠ ,
⎛⎝ φ0b
⎞⎠⟩L2
P×L2P×R
≤
−⟨AT
1 Pnφ, Pnφ⟩L2
P
+ T‖Pnφ‖2L2P− P (T−2 − lT )b2 + T−1
∥∥CT b∥∥2L2
P
.
By Lemma 5.3, AT1 > γ > 0 for all T sufficiently small, and therefore this expression
is negative for all φ ∈ H2P,0 and b ∈ R, since lT and CT are both bounded. Therefore,
there exists a T∗ > 0 such that for every T < T∗ there exists an n+ 1 dimensionalsubspace on which MT
n is negative definite. We conclude that
(3.7) neg(MT
n
)= n+ 1, for all T < T∗.
Notice that T∗ does not depend upon n. �

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 33
3.3. T = +∞. We diagonalize M∞n and count its negative eigenvalues. Con-
sidering (3.4), we see that it may be rewritten as
(3.8) F∞n =
⎛⎝ K∞n 0 00 −A∞
1,n 00 0 Pl∞
⎞⎠where K∞
n = A∞2,n + (B∞
n )∗ (A∞
1,n
)−1 B∞n . This inversion is allowed since A∞
1 isinvertible on the image of B∞, see Lemma 5.7. We can therefore conclude that
neg (M∞n ) = neg
(A∞
2,n + (B∞n )
∗ (A∞1,n
)−1 B∞n
)+ neg
(−A∞
1,n
)+ neg (l∞)
= neg(A∞
2,n + (B∞n )∗
(A∞
1,n
)−1 B∞n
)+ n− dim ker
(A∞
1,n
)− neg
(A∞
1,n
)+ neg (l∞) .
(3.9)
Since there are only finitely many negative eigenvalues, we have the simplestatement whose proof is omitted:
Lemma 3.2. There exists N > 0 such that for all n > N it holds that
neg(A∞
1,n
)= neg (A∞
1 )
and
neg(A∞
2,n + (B∞n )
∗ (A∞1,n
)−1 B∞n
)= neg
(A∞
2 + (B∞)∗(A∞
1 )−1 B∞
).
3.4. T large. The case of T → +∞ is more difficult, due to the mere strongconvergence QT
± → Q∞± .
Lemma 3.3. There exists T ∗ > 0 such that for any n ∈ N and any T > T ∗,neg(MT
n ) ≥ neg(M∞n ).
It is well-known that the spectra of a sequence of strongly continuous operatorsmay have discontinuities (as a set). One can think of the following simple example:let un be some orthonormal basis, and let πN be the orthogonal projection operatoronto span({un}n≥N ). Then πN → 0 strongly as N →∞, but the spectrum of πN is{0, 1} for all N . The proof of Lemma 3.3 relies on the following theorem regardingthe spectra of operators that are strongly continuous:
Theorem 3.4. Let AT = −Δ+V T be a Schrodinger operator on L2(Td), withdomain H2(Td) and with {V T }T∈(0,∞] a bounded family of strongly continuous,
relatively compact perturbations of Δ. Let Pn : L2(Td)→ L2(Td) be the orthogonalprojection operator onto the subspace associated to the first n eigenvalues (countingmultiplicity) of A∞. Define AT
n = PnATPn. Let ρ ∈ ρ(A∞) be an element in
the resolvent set of the operator A∞. Then there exist N = N(ρ) > 0 and T ∗ =T ∗(ρ) > 0 such that ρ ∈ ρ(AT
n ) for all n > N and for all T > T ∗.
Sketch of proof. The proof is by contradiction, showing that nontrivial so-lutions of AT
nfTn = ρfT
n for arbitrarily large n and T lead to a nontrivial solutionof A∞f = ρf , in contradiction to the assumption that ρ is not an eigenvalue. Themain difficulty is in understanding the convergence of terms of the form PnΔPnf
Tn .
It can be shown that PnΔPnfTn → Δf in the H−1 sense as T, n → ∞. However
bootstrapping this convergence to L2 requires a more delicate analysis. �

34 JONATHAN BEN-ARTZI
The full proof can be found in [2]. This theorem allows us to conclude that noeigenvalues ofMT
n cross through 0 for large values of n and T if 0 is in the resolventset on M∞. Lemma 3.3 follows immediately.
3.5. Conclusion. Combining Lemmas 3.2 and 3.3, together with (3.7) andthe condition (1.7) we conclude that for each n sufficiently large, there exists Tn ∈(T∗, T
∗) such that kerMTnn �= ∅. Now one only needs to let n →∞. This requires
an argument analogous to the one provided in Theorem 3.4, and one can concludethat there indeed exists T0 ∈ (T∗, T
∗) such that kerMT0 �= ∅ and that there existsan element in this kernel which is a nontrivial solution of the system (1.6).
4. On uniform ergodic theorems
The most difficult step in the proof of Theorem 1.2 is hidden in Theorem 3.4.As mentioned above, this difficulty stems from the mere strong convergence of theergodic averaging operators QT
±. Therefore here we take a step back and ask whensuch operators may have a limit also in the uniform operator topology.
We start with the L2 theory:
Proof of Theorem 1.3. We follow the ideas set forth by von Neumann inhis proof of the ergodic theorem [15], using the added structure that differentialoperators have via the Fourier transform. If {E(λ)}λ∈R is the spectral family ofthe self-adjoint operator H = −i d
dx : H1(R) ⊂ L2(R) → L2(R), then we have theexpression
(4.1) (E(λ)f, g)L2(R) =
∫ξ≤λ
f(ξ)g(ξ) dξ
where f(ξ) = (2π)−1/2∫Rf(x)e−ixξ dx is the Fourier transform of f . Whenever
this expression is differentiable with respect to λ, we get
(4.2)d
dλ
∣∣∣λ=λ0
(E(λ)f, g)L2(R) = f(λ0)g(λ0).
The pointwise evaluations on the right hand side require f , g ∈ Hσ(R) with σ > 1/2due to Sobolev embedding. This means that f, g ∈ L2,σ(R) (see the definition in(1.14)). We can therefore estimate
(4.3)
∣∣∣∣ d
dλ
∣∣∣λ=λ0
(E(λ)f, g)L2(R)
∣∣∣∣ ≤ C(σ)‖f‖L2,σ(R)‖g‖L2,σ(R)
which implies that there exists an operator A(λ0) : L2,σ(R) → L2,−σ(R) suchthat 〈A(λ0)f, g〉 = d
dλ
∣∣λ=λ0
(E(λ)f, g)L2(R) where 〈·, ·〉 is the (L2,−σ(R), L2,σ(R))
dual space pairing (with respect to the L2(R) inner product). Furthermore, theoperator norm of A may be estimated as
(4.4) ‖A(λ0)‖B(L2,σ(R),L2,−σ(R)) ≤ C(σ).
We are now in a position to finally prove the theorem. Let PT = 12T
∫ T
−TeitHdt,
then
PT f =1
2T
∫ T
−T
∫R
eitλdE(λ)f dt =
∫R
sinλT
λTdE(λ)f =
∫R\{0}
sinλT
λTdE(λ)f

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 35
where in the last equality we used the fact that H has a trivial kernel, i.e. E({0}) =0. We estimate this integral by breaking it up into the following two integrals:∫R\{0} =
∫Iε+
∫ICε
where Iε = (−ε, ε) and ε > 0 (the first integral should be∫Iε\{0}, but since E({0}) = 0 this does not matter). We start with the (simpler)
integral∫ICε:
∥∥∥∥∥∫ICε
sinλT
λTdE(λ)f
∥∥∥∥∥2
L2,−σ(R)
=
∫ICε
∣∣∣∣ sinλT
λT
∣∣∣∣2 d ‖E(λ)f‖2L2w(R)
≤ 1
ε2T 2
∫ICε
d ‖E(λ)f‖2L2(R)
≤ 1
ε2T 2
∫R
d ‖E(λ)f‖2L2(R)
=1
ε2T 2‖f‖2L2(R)
≤ 1
ε2T 2‖f‖2L2,σ(R).
(4.5)
For the other integral, we need the estimate (4.4):
∥∥∥∥∫Iε
sinλT
λTdE(λ)f
∥∥∥∥2L2,−σ(R)
=
∥∥∥∥∫Iε
sinλT
λTA(λ)f dλ
∥∥∥∥2
L2,−σ(R)
≤ C(σ)‖f‖2L2,σ(R)
∫Iε
∣∣∣∣ sinλT
λT
∣∣∣∣2 dλ≤ 2εC(σ)‖f‖2L2,σ(R).
(4.6)
Combining the two estimates (4.5) and (4.6) which hold for any ε > 0, we concludethat indeed limT→∞ PT = 0 in B(L2,σ(R), L2,−σ(R)). �
Now we turn to the weighted-L2 theory. In this case, determining the precisespectrum of the operator (and, indeed, even determining that the operator is self-adjoint) requires much more work. However, once this is done, the actual ergodictheorem is much simpler.
Proof of Theorem 1.4. It is clear that Hw is symmetric, closed and denselydefined on Dα. To show that it is essentially self-adjoint, we let g ∈ L2
w(R) andseek h ∈ L2
w(R) such that
(4.7) (Hwf, g)L2w(R) = (f, h)L2
w(R), ∀f ∈ Dα.
By taking f to be a smooth, compactly supported test function, we can concludethat g is differentiable and −iw−1 d
dxg ∈ L2w(R). However C∞
0 (R) is not a core. Letf ∈ C∞(R) be such that limx→∞ f(x) = α limx→−∞ f(x). The left hand side of

36 JONATHAN BEN-ARTZI
(4.7) becomes
(Hwf, g)L2w(R) = −i
∫ ∞
−∞
d
dxf(x)g(x) dx
= −i limR→∞
∫ R
−R
d
dxf(x)g(x) dx
= i limR→∞
[∫ R
−R
f(x)d
dxg(x) dx− f(R)g(R) + f(−R)g(−R)
].
Since −iw−1 ddxg ∈ L2
w(R) all limits exist so that we obtain
(Hwf, g)L2w(R) = i
[∫R
f(x)d
dxg(x) dx− f(∞)g(∞) + f(−∞)g(−∞)
]= i
[∫R
f(x)d
dxg(x) dx− αf(−∞)g(∞) + f(−∞)g(−∞)
]= i
∫R
f(x)d
dxg(x) dx− if(−∞)
(αg(∞)− g(−∞)
)which must equal the right hand side of (4.7):
i
∫R
f(x)d
dxg(x) dx−if(−∞)
(αg(∞)− g(−∞)
)=
∫R
f(x)h(x)w(x) dx, ∀f ∈ Dα.
For this equality to hold in general, g must satisfy αg(∞) = g(−∞), which becomesg(∞) = αg(−∞) by multiplying by α and recalling that |α| = 1. Hence we concludethat g ∈ Dα, and therefore Hw is essentially self-adjoint on Dα.
Moreover, we can determine the spectrum of Hαw by looking for solutions of
Hαwf = λf . Such solutions have the form
f(x) = Ceiλ∫ x0
w(t)dt.
The condition f(∞) = αf(−∞) becomes (letting α = eiβ , β ∈ [0, 2π))
λ
∫ ∞
0
w(t) dt = β + λ
∫ −∞
0
w(t) dt+ 2πk, k ∈ Z,
so that we conclude
(4.8) λβk = ‖w‖−1
L1(R)(β + 2πk), k ∈ Z.
The fact that there are no additional points in the spectrum is due to Hαw
having compact resolvent. Indeed, let us show that Rαw(z) = (Hα
w − z)−1, wherez ∈ C \ Σ(Hα
w), is a compact operator L2w(R) → Dα ⊂ L2
w(R). It suffices to showthat the embedding Dα ⊂ L2
w(R) is compact. Let K ⊂ Dα be a bounded set. Allelements of K are uniformly bounded near ±∞, and therefore for every ε > 0 thereexists M > 0 such that
∫|x|>M
|f(x)|2w(x) dx < ε for every f ∈ K. Concluding
that K is compact in L2w(R) is standard, using Rellich’s theorem on |x| < M and
the smallness of the tails on |x| > M . �
Proving Theorem 1.5 is now simple due to the existence of a spectral gap:

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 37
Proof of Theorem 1.5. Let {E(λ)}λ∈R be the spectral family of Hαw and
let PT = 12T
∫ T
−TeitH
αwdt. Then P = E({0}) is the orthogonal projection onto the
kernel of Hαw. Hence, as before, we can show that we have the representation
(PT − P )f =
∫R\{0}
sinλT
λTdE(λ)f
which we again break up into integrals over Iε \{0} = (−ε, ε)\{0} and ICε . If ε > 0is sufficiently small, the first integral makes no contribution due to the spectral gap.The second integral is treated as in (4.5), where the exact properties of the spectralfamily (and, in particular, whether the spectral measure is absolutely continuousor has atoms) do not matter. Moreover, we observe that these arguments do notrequire f to be in any special subspace of L2
w(R) as was the case before. �
5. Properties of the operators
Here we collect all the important properties of the operators appearing in Sec-tion 2. The proofs are technical and we refer to [1] for the details.
Lemma 5.1 (Properties of D±). D± are skew-adjoint operators on L2±. Their
null spaces kerD± consist of all functions in L2± that are constant on each connected
component in R × R2 of {e± = const and p± = const}. In particular, kerD±
contain all functions of e± and of p±.
Lemma 5.2 (Properties of QT±). Let 0 < T <∞.
(1) QT± map L2
± → L2± with operator norm = 1.
(2) For all m ∈ L2±,
∥∥QT±m−Q∞
± m∥∥± → 0 as T →∞.
(3) For all m ∈ L2±,
∥∥QT±m−m
∥∥± → 0 as T → 0.
(4) If S > 0, then∥∥QT
± −QS±∥∥ = O(|T − S|) as T → S, where ‖ · ‖ is the
operator norm from L2± to L2
±.(5) The projection operators Q∞
± preserve parity with respect to the variablev1.
Lemma 5.3 (Properties of AT1 ,AT
2 ). Let 0 ≤ T <∞.
(1) AT1 is self-adjoint on L2
P,0. AT2 is self-adjoint on L2
P . Their domains are
H2P,0 and H2
P , respectively, and their spectra are discrete.
(2) For all h ∈ H2P,0, ‖AT
1 h−A∞1 h‖L2
P→ 0 as T →∞. The same is true for
AT2 with h ∈ H2
P .(3) For i = 1, 2 and S > 0, it holds that ‖AT
i −AS‖ = O(|T − S|) as T → S,where ‖ · ‖ is the operator norm from H2
P,0 to L2P in the case i = 1, and
from H2P to L2
P in the case i = 2.(4) For all h ∈ H2
P,0, ‖AT1 h+ ∂2
xh‖L2P→ 0 as T → 0.
(5) When thought of as acting on H2P (rather than H2
P,0), the null spaces of
AT1 and A∞
1 both contain the constant functions.(6) There exist constants γ > 0 and T > 0 such that AT
i > γ > 0 for allT ≤ T and i = 1, 2.
Lemma 5.4 (Properties of BT , CT ,DT ). Let 0 < T <∞.
(1) BT maps L2P → L2
P with operator bound independent of T . Moreover,Ran(B∞) ⊂ {1}⊥.

38 JONATHAN BEN-ARTZI
(2) For all h ∈ L2P , as T →∞ we have: ‖BTh− B∞h‖L2
P→ 0 and
‖CTh‖L2P, ‖DTh‖L2
P→ 0.
(3) If S > 0, then ‖BT − BS‖ = O(|T − S|) as T → S, where ‖ · ‖ is theoperator norm from L2
P to L2P . The same is true for CT ,DT .
(4) For all h ∈ L2P , ‖BTh‖L2
P→ 0 as T → 0. The same is true for CT ,DT .
Lemma 5.5 (Properties of lT ). Let 0 < T <∞.
(1) lT → l∞ as T →∞.(2) lT is uniformly bounded in T .
Lemma 5.6 (Properties ofMT ). To simplify notation, we write u for a genericelement (φ, ψ, b) ∈ H2
P ×H2P × R.
(1) For all T ≥ 0, MT is self-adjoint on L2P × L2
P × R with domain H2P ×
H2P × R.
(2) For all u ∈ H2P ×H2
P × R, ‖MTu−M∞u‖L2P×L2
P×L2P→ 0 as T →∞.
(3) If S > 0, then ‖MT −MS‖ → 0 as T → S, where ‖ · ‖ is the operatornorm from H2
P,0 ×H2P × R to L2
P × L2P × L2
P .
Lemma 5.7. The operator (B∞)∗(A∞
1 )−1 B∞ is a well-defined bounded operator
from L2P → L2
P .
References
[1] Jonathan Ben-Artzi, Instability of nonmonotone magnetic equilibria of the relativisticVlasov-Maxwell system, Nonlinearity 24 (2011), no. 12, 3353–3389, DOI 10.1088/0951-7715/24/12/004. MR2854308 (2012j:35420)
[2] Jonathan Ben-Artzi, Instability of nonsymmetric nonmonotone equilibria of the Vlasov-Maxwell system, J. Math. Phys. 52 (2011), no. 12, 123703, 21, DOI 10.1063/1.3670874.MR2907660 (2012m:82049)
[3] Jonathan Ben-Artzi, On the spectrum of shear flows and uniform ergodic theorems, J. Funct.Anal. 267 (2014), no. 1, 299–322, DOI 10.1016/j.jfa.2014.04.012. MR3206516
[4] Jonathan Ben-Artzi and Thomas Holding, Instabilities of the relativistic Vlasov-Maxwellsystem on unbounded domains. arXiv: http://arxiv.org/abs/1505.05672
[5] Jonathan Ben-Artzi and Clement Mouhot, Uniform convergence in von Neumann’s ergodictheorem, in preparation.
[6] Robert Glassey and Jack Schaeffer, On the “one and one-half dimensional” relativis-tic Vlasov-Maxwell system, Math. Methods Appl. Sci. 13 (1990), no. 2, 169–179, DOI10.1002/mma.1670130207. MR1066384 (91g:82054)
[7] Yan Guo and Zhiwu Lin, Unstable and stable galaxy models, Comm. Math. Phys. 279 (2008),no. 3, 789–813, DOI 10.1007/s00220-008-0439-z. MR2386728 (2009f:35019)
[8] J. H Jeans, On the theory of star-streaming and the structure of the universe, Mon. Not. R.Astron. Soc. 76 (1915), 70–84.
[9] Tosio Kato, Perturbation theory for linear operators, Classics in Mathematics, Springer-Verlag, Berlin, 1995. Reprint of the 1980 edition. MR1335452 (96a:47025)
[10] Mohammed Lemou, Florian Mehats, and Pierre Raphael, A new variational approach tothe stability of gravitational systems, Comm. Math. Phys. 302 (2011), no. 1, 161–224, DOI10.1007/s00220-010-1182-9. MR2770012 (2012d:82066)
[11] Mohammed Lemou, Florian Mehats, and Pierre Raphael, Orbital stability of spherical galac-tic models, Invent. Math. 187 (2012), no. 1, 145–194, DOI 10.1007/s00222-011-0332-9.MR2874937
[12] Zhiwu Lin, Instability of periodic BGK waves, Math. Res. Lett. 8 (2001), no. 4, 521–534,DOI 10.4310/MRL.2001.v8.n4.a11. MR1849267 (2003b:82057)
[13] Zhiwu Lin and Walter A. Strauss, A sharp stability criterion for the Vlasov-Maxwell sys-tem, Invent. Math. 173 (2008), no. 3, 497–546, DOI 10.1007/s00222-008-0122-1. MR2425135(2009i:82078)

INSTABILITIES IN KINETIC THEORY AND THE ERGODIC THEOREM 39
[14] Clement Mouhot and Cedric Villani, On Landau damping, Acta Math. 207 (2011), no. 1,29–201, DOI 10.1007/s11511-011-0068-9. MR2863910
[15] John von Neumann, Proof of the quasi-ergodic hypothesis, Proc. Natl. Acad. Sci. 18 (1932),no. 2, 70–82.
Department of Mathematics, Imperial College, London SW7 2AZ, United Kingdom
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13177
Some Recent Progress on Sharp Kato-typeSmoothing Estimates
Neal Bez and Mitsuru Sugimoto
Abstract. Space-time estimates of the type
‖Ψ(x,∇) exp(−itΔ)f‖L2t,x(R×Rd) ≤ C‖f‖L2(Rd),
where Ψ(x,∇) = 〈x〉−s (s ≥ 1), Ψ(x,∇) = |x|a−1|∇|a (1− d/2 < a < 1/2) or
Ψ(x,∇) = 〈x〉−s|∇|1/2 (s > 1/2), are often called smoothing estimates, andthere is a vast literature surrounding these estimates. Simon [22] initiated
the study of optimal constants for smoothing estimates by obtaining them inthe special cases Ψ(x,∇) = |x|−1 and Ψ(x,∇) = 〈x〉−1|∇|1/2. In this article,recent progress on optimal constants and their extremisers for more generalcases are discussed based on recent works [4] and [5] by the authors.
1. Introduction
This survey article is based on recent work of the authors on sharp Kato-typesmoothing estimates. The theorems presented here are a collection of simplifiedresults from [4] and [5], where the reader is directed for full statements of resultsand complete proofs.
It is well known that the solution u(t, x) = exp(−itΔ)f(x) of the Schrodingerequation {
(i∂t −Δx) u(t, x) = 0,
u(0, x) = f(x) ∈ L2(Rd)
preserves the L2-norm of the initial data f ; that is, we have the identity
‖u(t, ·)‖L2x(R
d) = ‖f‖L2(Rd)
for any fixed time t ∈ R, which is a straightforward consequence of Plancherel’stheorem. On the other hand, in the case d = 1, by another use of Plancherel’stheorem, we also have
(1.1)∥∥∥|Dx|1/2u(·, x)
∥∥∥L2
t (R)≤ ‖f‖L2(R)
for any fixed position x ∈ R. This estimate suggests that integration of the solutionin t produces an extra gain of regularity of order 1/2 in x. This kind of property issometimes referred to as Kato’s smoothing effect since it goes back to the seminalwork of T. Kato [15] in 1965.
2010 Mathematics Subject Classification. Primary 35B45, 42B37; Secondary 35P10, 35B65.Key words and phrases. Smoothing estimates, optimal constants, extremisers.
c©2015 N. Bez, M. Sugimoto
41

42 NEAL BEZ AND MITSURU SUGIMOTO
We remark that the proof of inequality (1.1) is straightforward. In fact, wehave
|Dx|1/2u(t, x) =1
2π
∫R
eixξeit|ξ|2 |ξ|1/2f(ξ)dξ
=1
4π
∫ ∞
0
eitη(eix
√η f(
√η) + e−ix
√ηf(−√η)
)|η|−1/4 dη
by the change of variable ξ = ±√η. Then by Plancherel’s theorem we have∥∥∥|Dx|1/2u(·, x)∥∥∥2L2
t (R)=
1
8π
∫ ∞
0
∣∣∣eix√ηf(√η) + e−ix
√η f(−√η)
∣∣∣2|η|−1/2 dη
≤ 1
4π
∫ ∞
0
(∣∣∣f(√η)∣∣∣2 + ∣∣∣f(−√η)
∣∣∣2)|η|−1/2 dη
=1
2π
∫R
|f(ξ)|2 dξ = ‖f‖2L2(R),
where we have changed back the variable η = ξ2. From this proof we can see thatinequality (1.1) is optimal in the sense that equality is attained when x = 0 foreven functions f .
From inequality (1.1), we easily obtain the space-time estimate∥∥∥〈x〉−s|Dx|1/2 exp(−itΔ)f∥∥∥L2
t,x(R×R)≤ C‖f‖L2(R)
for s > 1/2. Even for the higher dimensional case d ≥ 2, similar estimates areknown:
(1.2) ‖Ψ(x,∇) exp(−itΔ)f‖L2t,x(R×Rd) ≤ C‖f‖L2(Rd)
with
[A] : Ψ(x,∇) = 〈x〉−s〈∇〉1/2 ; s ≥ 1 (s > 1, d = 2),[B] : Ψ(x,∇) = |x|a−1|∇|a ; 1− d/2 < a < 1/2,[C] : Ψ(x,∇) = 〈x〉−s|∇|1/2 ; s > 1/2.
Here we have used the notation 〈x〉 = (1 + |x|2)1/2 and 〈∇〉 = (1 −Δ)1/2. Thesekinds of estimates are often called smoothing estimates, and there is a vast liter-ature on this subject, including pioneering work of Kato [15], [16], and subsequentwork of Constantin and Saut [8], Sjolin [23] and Vega [26], which established localsmoothing estimates for Schrodinger equations. Among them, the estimate of type[A] is due to Kato and Yajima [17] (see also Ben-Artzi and Klainerman [1]). Type[B] is due to Kato and Yajima [17] for a ∈ [0, 1/2) whenever d ≥ 3, and a ∈ (0, 1/2)for d = 2 (see also Ben-Artzi and Klainerman [1] for a different approach, and forthe best possible range a ∈ (1−d/2, 1/2) whenever d ≥ 2, see Sugimoto [25], Vilela[27] and Watanabe [29]). Type [C] is due to Kenig, Ponce and Vega [19] (see alsoBen-Artzi and Klainerman [1] and Chihara [7]).
It is very natural to seek the optimal constant C, which we denote by C, in(1.2) along with information regarding the existence/non-existence and shape ofextremising initial data. As far as we are aware, Simon [22] initiated matters byidentifying the optimal constants for type [B] estimates with a = 0 and type [C]estimates with s = 1 in the case d ≥ 3. These cases were preliminary considerationsfor type [A] with s = 1, but the optimal constant was not identified in this case in

RECENT PROGRESS ON SHARP KATO-TYPE SMOOTHING ESTIMATES 43
[22]. Thus, from [22] we have
[A]s=1 : Ψ(x,∇) = 〈x〉−1〈∇〉1/2 ; C = ?
[B]a=0 : Ψ(x,∇) = |x|−1 ; C =√
π/(d− 2)
[C]s=1 : Ψ(x,∇) = 〈x〉−1|∇|1/2 ; C =√
π/2
naturally raising the question of determining optimal constants more widely in thecontext of smoothing estimates, and, despite not being addressed in [22], questionsregarding extremisers. Here, our intention is to survey some recent progress onthese questions by the authors in [4] and [5].
2. Notation and assumptions
We always assume d ≥ 2, and consider the triple of radial functions:
· radial weight w : [0,∞)→ [0,∞),
· smoothing function ψ : [0,∞)→ [0,∞),
· dispersion relation φ : [0,∞)→ R.
Associated to such (w,ψ, φ), we define the following notation and terminology:
• Let Cd(w,ψ, φ) be the optimal constant C ∈ (0,∞] for which thesmoothing estimate
‖w(|x|)1/2ψ(|∇|) exp(itφ(|∇|)f‖L2t,x(R×Rd) ≤ C‖f‖L2(Rd)
holds for all f ∈ L2(Rd). That is,
Cd(w,ψ, φ) = supf∈L2(Rd)\{0}
Cd(w,ψ, φ; f),
Cd(w,ψ, φ; f) =‖w(|x|)1/2ψ(|∇|) exp(itφ(|∇|)f‖L2
t,x(R×Rd)
‖f‖L2(Rd)
.
• An extremiser is a function f ∈ L2(Rd) \ {0} for which
Cd(w,ψ, φ; f) = Cd(w,ψ, φ).
• Let k ∈ N0, and let
αk(�) =�ψ(�)2
|φ′(�)|
∫ ∞
0
Jν(k)(r�)2rw(r) dr,
where Jν is the Bessel function of order ν, and
ν(k) = d2 + k − 1.
It will be assumed that (w,ψ, φ) is such that αk is a continuous function; this isan unrestrictive regularity assumption on (w,ψ, φ) which is satisfied in all cases weare interested in. We remark that smoothing estimates (1.2) correspond to the caseφ(r) = r2 and
[A] : Ψ(x,∇) = 〈x〉−s〈∇〉1/2 ; (w,ψ) = (〈r〉−2s, 〈r〉1/2)[B] : Ψ(x,∇) = |x|a−1|∇|a ; (w,ψ) = (r2(a−1), ra)
[C] : Ψ(x,∇) = 〈x〉−s|∇|1/2 ; (w,ψ) = (〈r〉−2s, r1/2).

44 NEAL BEZ AND MITSURU SUGIMOTO
3. Walther’s expression of the optimal constant
In an important contribution to this topic, Walther [28] obtained that
(3.1) Cd(w,ψ, φ) =
(2π sup
k∈N0
sup�∈[0,∞)
αk(�)
)1/2
,
and it is clear from the expression in (3.1) that
Cd(w,ψ, φ) = Cd(w, ψ, φ)
whenever
w = w, ψ2/|φ′| = ψ2/|φ′|.In this paper, we are primarily fixing attention on the Schrodinger propagator; thisis merely for simplicity of the exposition, and further optimal constants for differentpropagators (such as the wave and Klein–Gordon propagators corresponding toφ(r) = r and φ(r) = 〈r〉, respectively) are automatically available in light of thisobservation.
We briefly repeat the argument by Walther [28] in the case of the Schrodingerpropagator to show how αk(�) arises in the expression (3.1) of optimal constant.The basic tool is the spherical harmonic decomposition
L2(Rd) =∞⊕k=0
Hk
where Hk denotes the space of all linear combinations of functions of the form
ξ → P (ξ)f0(|ξ|)|ξ|−d/2−k+1/2
where P is homogeneous harmonic polynomial (i.e. solid spherical harmonic) ofdegree k and f0 ∈ L2(0,∞). By fixing an orthonormal basis {P (k,1), . . . , P (k,ak)} ofsolid spherical harmonics of degree k, given f ∈ L2(Rd), we may write its Fouriertransform as
(3.2) f =∞∑k=0
ak∑m=1
f (k,m),
where
f (k,m)(ξ) = P (k,m)(ξ)f(k,m)0 (|ξ|)|ξ|−d/2−k+1/2
and f(k,m)0 ∈ L2(0,∞).
The first step is to use polar coordinates ξ = rθ and a subsequent change ofvariables � = r2 to write
exp(−itΔ)f(x) =1
(2π)d
∫Rd
eix·ξe−it|ξ|2 f(ξ) dξ
=1
2(2π)d
∫R
e−it�
(�
d−22
∫Sd−1
ei√�x·θ f(
√�θ) dσ(θ)
)d�
which, for fixed x, is a certain Fourier transform in the temporal variable. Here, dσdenotes the induced Lebesgue measure on the unit sphere. Applying Plancherel inthe temporal variable, followed by the decomposition (3.2), orthogonality consider-ations and the formula
Pdσ(x) =(2π)d/2
ikP (x)Jν(k)(|x|)|x|−ν(k)

RECENT PROGRESS ON SHARP KATO-TYPE SMOOTHING ESTIMATES 45
for solid spherical harmonics P (of order k), we are led to
‖w(|x|)1/2ψ(|∇|) exp(−itΔ)f‖2L2t,x
=1
(2π)d−1
∞∑k=0
ak∑m=1
∫ ∞
0
αk(�)|f (k,m)0 (�)|2 d�.
Since
‖f‖2L2(Rd) =
∞∑k=0
ak∑m=1
∫ ∞
0
|f (k,m)0 (�)|2 d�
and by a further application of Plancherel’s theorem, it is clear that
‖w(|x|)1/2ψ(|∇|) exp(−itΔ)f‖2L2t,x(R×Rd) ≤ 2π
(supk∈N0
sup�∈[0,∞)
αk(�)
)‖f‖2L2(Rd)
and that the constant cannot be improved; this gives the expression (3.1).
4. Analyticity of αk and a fundamental result on extremisers
To state our first result, we let
α = supk∈N0
sup�∈[0,∞)
αk(�).
From the argument in the previous section, we obtain
Theorem 4.1. An extremiser exists if and only if there exists k0 ∈ N0 and aset S ⊂ (0,∞) of positive Lebesgue measure such that αk0
(�) = α for all � in S.
We could deduce rather quickly from Theorem 4.1 the non-existence of extrem-isers if we knew the analyticity of each αk. For this purpose, we prepare
Theorem 4.2. Let σ > 1 and let wσ(r) = 〈r〉−σ. Suppose that the weight w issmooth and there exists a constant C so that
|w(m)(r)| ≤ C|w(m)σ (r)|
for each m ∈ N0 and r ∈ [0,∞). If, additionally, ψ and φ are such that ψ2
|φ′| is real
analytic on (0,∞) then αk is real analytic on (0,∞) for each k ∈ N0.
Let (w(r), ψ(r), φ(r)) satisfy the same hypotheses of Theorem 4.2. Then bycombining Theorems 4.1 and 4.2, we have that there are no extremisers if αk isnon-constant for each k ∈ N0. Since we have
�
∫ ∞
0
Jν(r�)2rw(r) dr →
{0 · · · ρ→ 01π‖w‖L1(0,∞) · · · ρ→∞
and
αk(�) =�ψ(�)2
|φ′(�)|
∫ ∞
0
Jν(k)(r�)2rw(r) dr,
we have the following corollary as a special case.
Corollary 4.3. Let (w(r), ψ(r), φ(r)) satisfy the same hypotheses as in The-orem 4.2. If w �= 0, and
ψ(�)2
|φ′(�)|is asymptotically constant as � tends to zero and asymptotically nonzero constantas � tends to infinity, then there are no extremisers.

46 NEAL BEZ AND MITSURU SUGIMOTO
The hypotheses of Corollary 4.3 are satisfied in a number of classical smoothingestimates. The type [C] case
(w(r), ψ(r), φ(r)) = (〈r〉−2s, r1/2, r2), s > 1/2
is a typical example; in the special case where s = 1 and d ≥ 3, Simon [22] showed
Cd(w,ψ, φ) = (π/2)1/2,
and Corollary 4.3 allows us to conclude that this estimate, along with all type [C]estimates, have no extremisers.
5. Homogeneous weights
The case where the weight is homogeneous is particularly accessible and wehave
Theorem 5.1. If w(r) = r−2(1−a), where 1− d/2 < a < 1/2, then
Cd(w,ψ, φ) =
(22aπ
Γ(1− 2a)Γ(d2 + a− 1)
Γ(1− a)2Γ(d2 − a)sup�>0
�1−2aψ(�)2
|φ′(�)|
)1/2
.
When, in addition, (ψ(r), φ(r)) = (ra, r2), we have that Cd(w,ψ, φ) = Cd(w,ψ, φ; f)precisely when f ∈ L2(Rd) \ {0} is radial.
That is, the optimal constant for smoothing estimates of type [B] can be ex-plicitly written down, and moreover any nonzero radially symmetric function inL2(Rd) is an extremiser. This latter fact was first established by Watanabe [29]by a different argument; see also the recent work of Ozawa and Rogers [20] wherecertain angular refinements are established. We remark that in the special case(w(r), ψ(r), φ(r)) = (r−2, 1, r2) for the Schrodinger propagator when a = 0, wehave
Cd(w,ψ, φ) = (π/(d− 2))1/2,
and this is the optimal constant given by Simon [22].The type [B] estimate in the critical case a = 1/2 is not true but instead we
have
‖Ψ(x,∇) exp(−itΔ)f‖L2t,x(R×Rd) ≤ C‖f‖L2(Rd)
for
Ψ(x,∇) = |x|a−1(−Λ)1/4−a/2|∇|a ∼ |x|−1/2|∇|1/2
with 1− d/2 < a < 1/2, where −Λ = |x ∧∇|2 is the homogeneous extension of theLaplace–Beltrami operator on the sphere Sd−1. For this estimate, we have
Theorem 5.2. Let d ≥ 2 and let 1−d/2 < a < 1/2. Then the optimal constantof the estimate∥∥∥|x|a−1(−Λ)1/4−a/2|∇|a exp(−itΔ)f
∥∥∥L2
t,x(R×Rd)≤ C‖f‖L2(Rd)
is (π22a−1Γ(1− 2a)
Γ(1− a)2
)1/2
and there are no extremisers.

RECENT PROGRESS ON SHARP KATO-TYPE SMOOTHING ESTIMATES 47
It is known that the related smoothing estimate∥∥∥|x|a−1(1− Λ)1/4−a/2|∇|a exp(−itΔ)f∥∥∥L2
t,x(R×Rd)≤ C‖f‖L2(Rd)
is true by Hoshiro [13] and Sugimoto [25]. Interestingly, it has been recentlydiscovered that, for the same range of a, its reverse form
c‖f‖L2(Rd) ≤∥∥∥|x|a−1(1− Λ)1/4−a/2|∇|a exp(−itΔ)f
∥∥∥L2
t,x(R×Rd)
also holds for some positive constant c; see Fang and Wang [9]. The optimalconstants and information on extremisers for these estimates has been explicitlydetermined in [5]. The full statement of this result is rather lengthy because thedescription depends very sensitively on the spatial dimension d ≥ 2 and the indexa ∈ (1−d/2, 1/2). As a special case, we just present here a miraculous result whichcorresponds to the case d = 4 and a = 0.
Theorem 5.3. We have the identity∥∥∥|x|−1(1− Λ)1/4 exp(−itΔ)f∥∥∥L2
t,x(R×R4)=√2π‖f‖L2(R4)
for all f ∈ L2(R4).
6. Type [A] optimal constants and extremisers
Corresponding to the case w(r) = 〈r〉−2, we have∫ ∞
0
Jν(k)(r�)2 r
1 + r2dr = Iν(k)(�)Kν(k)(�),
where the modified Bessel functions of the first kind, Iν and Kν , are given by
Iν(�) = i−νJν(i�) and Kν(�) =π
2 sin(νπ)(I−ν(�)− Iν(�)).
We remark that the order ν(k) of modified Bessel functions is a half-integer for oddspatial dimensions in which case they are elementary functions. For example,
I1/2(r) = ( 2πr )
1/2 sinh(r),
K1/2(r) = ( π2r )
1/2e−r,
I3/2(r) = ( 2πr )
1/2(cosh(r)− r−1 sinh(r)),
K3/2(r) = ( π2r )
1/2(1 + r−1)e−r.
Additionally, the monotonicity of expressions involving modified Bessel functionsand their products, both in k ∈ N0 (for fixed � > 0) and in � > 0 (for fixed k ∈ N0),has been well-studied, and by appealing to various results from this literature, weare able to prove the following
Theorem 6.1. If (w(r), ψ(r), φ(r)) = (〈r〉−2, 〈r〉1/2, r2), then
C3(w,ψ, φ) = π1/2 and Cd(w,ψ, φ) = (π/2)1/2 (d ≥ 5).
In each case, extremisers do not exist.
As far as we are aware, the optimal constants in Theorem 6.1 are the onlyknown optimal constants for smoothing estimates of type [A].

48 NEAL BEZ AND MITSURU SUGIMOTO
7. Concluding remarks
We have seen that the optimal constants for smoothing estimates of type [A]with s = 1, d = 3, d ≥ 5, type [B], and type [C] with s = 1 have been explicitlydetermined, but those for other cases are still left open. Additionally, we have seenthat there are no extremisers for type [A] estimates with s = 1, d = 3, d ≥ 5 andtype [C] estimates, but extremisers exist for type [B] estimates and they are preciselythose nonzero and square-integrable functions which are radially symmetric.
A related fact is that the smoothing estimate
‖w(|x|)1/2ψ(|∇|) exp(−itΔ)f‖L2t,x(R×Rd) ≤ C‖f‖L2(Rd)
is equivalent to the trace theorem∥∥f|�Sd−1
∥∥L2(�Sd−1;�d−1dσ)
≤√�√
πψ(�)C‖w(|∇|)−1/2f‖L2(Rd) (� > 0)
by a duality argument. By writing s = 1 − a and an additional scaling argument,the type [B] estimate is in fact equivalent to∥∥f|Sd−1
∥∥L2(Sd−1;dσ)
≤ C√π‖|∇|sf‖L2(Rd)
for d ≥ 2 and 1/2 < s < d/2. In this way, we may immediately obtain theoptimal constant in the classical trace theorem on the sphere for functions in thehomogeneous Sobolev space, with 1/2 being the critical regularity to obtain a well-defined restriction to the sphere. We refer the reader to the work of Ruzhanskyand Sugimoto [21] for further details, and to very recent work of Bez, Machiharaand Sugimoto [3] for a characterisation of the extremisers.
The trace theorem may equivalently be considered as∥∥∥f|Sd−1
∥∥∥L2(Sd−1;dσ)
≤ (2π)d/2C√π‖f‖L2(Rd;|·|2s)
which is a restriction theorem for the Fourier transform to the sphere for weightedL2 functions with power weight | · |2s and 1/2 < s < d/2. A significantly deeperresult in this context is the Stein–Tomas restriction theorem for the sphere, whichuses the non-vanishing Gaussian curvature of the sphere in a fundamental way, andstates that, for each d ≥ 2,
(7.1)∥∥∥f|Sd−1
∥∥∥L2(Sd−1;dσ)
≤ C‖f‖L
2 d+1d+3 (Rd)
.
We remark that the only known optimal constant for the Stein–Tomas restrictionestimate for the sphere (7.1) is when d = 3 thanks to a beautiful recent argumentof Foschi [11]. For this, it is crucial that the dual exponent to 2d+1
d+3 = 43 is 4, which
is an even integer.Very closely related to (7.1) are the Strichartz space-time estimates for the
Schrodinger propagator. In full mixed-norm generality, these state that
‖exp(−itΔ)f‖Lpt (R;L
qx(Rd)) ≤ C‖f‖L2(Rd),
where 2/p + d/q = d/2, p, q ≥ 2, (p, q, d) �= (2,∞, 2), with contributions fromStrichartz [24], Ginibre–Velo [12] and finally Keel and Tao [18] in the endpointcase. Again, the optimal constant C for such estimates has only been establishedin some rather special cases, again relying on even integer exponents:
• (p, q, d) = (6, 6, 1) =⇒ C = 12−1/12

RECENT PROGRESS ON SHARP KATO-TYPE SMOOTHING ESTIMATES 49
• (p, q, d) = (4, 4, 2) =⇒ C = 2−1/2
• (p, q, d) = (8, 4, 1) =⇒ C = 2−1/4.
In each of the above cases, the extremisers are Gaussian functions. The first two re-sults are due to independent works of Foschi [10] and Hundertmark and Zharnitsky[14], whilst the remaining case (p, q, d) = (8, 4, 1) follows from (p, q, d) = (4, 4, 2)using certain tensor product invariances; see Bennett et al [2] and also Carneiro [6]for this observation. The reason that significantly more is known about the optimalconstant and extremisers for smoothing estimates (1.2) is that the norm on boththe initial data and the solution are L2 based.
References
[1] Matania Ben-Artzi and Sergiu Klainerman, Decay and regularity for the Schrodinger equa-tion, J. Anal. Math. 58 (1992), 25–37, DOI 10.1007/BF02790356. Festschrift on the occasionof the 70th birthday of Shmuel Agmon. MR1226935 (94e:35053)
[2] Jonathan Bennett, Neal Bez, Anthony Carbery, and Dirk Hundertmark, Heat-flowmonotonicity of Strichartz norms, Anal. PDE 2 (2009), no. 2, 147–158, DOI
10.2140/apde.2009.2.147. MR2547132 (2010j:35418)[3] N. Bez, S. Machihara and M. Sugimoto, Extremisers for the trace theorem on the sphere,
submitted.[4] N. Bez and M. Sugimoto, Optimal constants and extremisers for some smoothing estimates,
to appear in J. Anal. Math, arXiv:1206:5110.[5] Neal Bez and Mitsuru Sugimoto, Optimal forward and reverse estimates of Morawetz and
Kato-Yajima type with angular smoothing index, J. Fourier Anal. Appl. 21 (2015), no. 2,318–341, DOI 10.1007/s00041-014-9371-0. MR3319535
[6] Emanuel Carneiro, A sharp inequality for the Strichartz norm, Int. Math. Res. Not. IMRN16 (2009), 3127–3145, DOI 10.1093/imrn/rnp045. MR2533799 (2010h:35328)
[7] Hiroyuki Chihara, Smoothing effects of dispersive pseudodifferential equations, Comm. Par-tial Differential Equations 27 (2002), no. 9-10, 1953–2005, DOI 10.1081/PDE-120016133.MR1941663 (2004c:35441)
[8] P. Constantin and J.-C. Saut, Local smoothing properties of dispersive equations, J. Amer.Math. Soc. 1 (1988), no. 2, 413–439, DOI 10.2307/1990923. MR928265 (89d:35150)
[9] Daoyuan Fang and Chengbo Wang,Weighted Strichartz estimates with angular regularity andtheir applications, Forum Math. 23 (2011), no. 1, 181–205, DOI 10.1515/FORM.2011.009.MR2769870 (2012b:35208)
[10] Damiano Foschi, Maximizers for the Strichartz inequality, J. Eur. Math. Soc. (JEMS) 9(2007), no. 4, 739–774, DOI 10.4171/JEMS/95. MR2341830 (2008k:35389)
[11] Damiano Foschi, Global maximizers for the sphere adjoint Fourier restriction inequality, J.Funct. Anal. 268 (2015), no. 3, 690–702, DOI 10.1016/j.jfa.2014.10.015. MR3292351
[12] J. Ginibre and G. Velo, The global Cauchy problem for the nonlinear Schrodinger equation
revisited (English, with French summary), Ann. Inst. H. Poincare Anal. Non Lineaire 2(1985), no. 4, 309–327. MR801582 (87b:35150)
[13] Toshihiko Hoshiro, On weighted L2 estimates of solutions to wave equations, J. Anal. Math.72 (1997), 127–140, DOI 10.1007/BF02843156. MR1482992 (99j:35120)
[14] Dirk Hundertmark and Vadim Zharnitsky, On sharp Strichartz inequalities in lowdimensions, Int. Math. Res. Not., posted on 2006, Art. ID 34080, 18, DOI10.1155/IMRN/2006/34080. MR2219206 (2007b:35277)
[15] Tosio Kato, Wave operators and similarity for some non-selfadjoint operators, Math. Ann.162 (1965/1966), 258–279. MR0190801 (32 #8211)
[16] Tosio Kato, On the Cauchy problem for the (generalized) Korteweg-de Vries equation, Studiesin applied mathematics, Adv. Math. Suppl. Stud., vol. 8, Academic Press, New York, 1983,pp. 93–128. MR759907 (86f:35160)
[17] Tosio Kato and Kenji Yajima, Some examples of smooth operators and the associated smooth-ing effect, Rev. Math. Phys. 1 (1989), no. 4, 481–496, DOI 10.1142/S0129055X89000171.MR1061120 (91i:47013)

50 NEAL BEZ AND MITSURU SUGIMOTO
[18] Markus Keel and Terence Tao, Endpoint Strichartz estimates, Amer. J. Math. 120 (1998),no. 5, 955–980. MR1646048 (2000d:35018)
[19] Carlos E. Kenig, Gustavo Ponce, and Luis Vega, Oscillatory integrals and regular-ity of dispersive equations, Indiana Univ. Math. J. 40 (1991), no. 1, 33–69, DOI10.1512/iumj.1991.40.40003. MR1101221 (92d:35081)
[20] Tohru Ozawa and Keith M. Rogers, Sharp Morawetz estimates, J. Anal. Math. 121 (2013),163–175, DOI 10.1007/s11854-013-0031-0. MR3127381
[21] Michael Ruzhansky and Mitsuru Sugimoto, Trace theorems: critical cases and best constants,Proc. Amer. Math. Soc. 143 (2015), no. 1, 227–237, DOI 10.1090/S0002-9939-2014-12207-6.MR3272748
[22] Barry Simon, Best constants in some operator smoothness estimates, J. Funct. Anal. 107(1992), no. 1, 66–71, DOI 10.1016/0022-1236(92)90100-W. MR1165866 (93e:47064)
[23] Per Sjolin, Regularity of solutions to the Schrodinger equation, Duke Math. J. 55 (1987),no. 3, 699–715, DOI 10.1215/S0012-7094-87-05535-9. MR904948 (88j:35026)
[24] Robert S. Strichartz, Restrictions of Fourier transforms to quadratic surfaces and decay of so-lutions of wave equations, Duke Math. J. 44 (1977), no. 3, 705–714. MR0512086 (58 #23577)
[25] Mitsuru Sugimoto, Global smoothing properties of generalized Schrodinger equations, J. Anal.Math. 76 (1998), 191–204, DOI 10.1007/BF02786935. MR1676995 (2000a:35033)
[26] Luis Vega, Schrodinger equations: pointwise convergence to the initial data, Proc. Amer.Math. Soc. 102 (1988), no. 4, 874–878, DOI 10.2307/2047326. MR934859 (89d:35046)
[27] M. C. Vilela, Regularity of solutions to the free Schrodinger equation with radial initial data,Illinois J. Math. 45 (2001), no. 2, 361–370. MR1878609 (2002k:35061)
[28] Bjorn G. Walther, Regularity, decay, and best constants for dispersive equations, J. Funct.Anal. 189 (2002), no. 2, 325–335, DOI 10.1006/jfan.2001.3863. MR1891852 (2003a:35218)
[29] Kazuo Watanabe, Smooth perturbations of the selfadjoint operator |Δ|α/2, Tokyo J. Math.14 (1991), no. 1, 239–250, DOI 10.3836/tjm/1270130504. MR1108171 (92j:47094)
Department of Mathematics, Graduate School of Science and Engineering, Saitama
University, Saitama 338-8570, Japan
E-mail address: [email protected]
Graduate School of Mathematics, Nagoya University, Furocho, Chikusa-ku, Nagoya
464-8602, Japan
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13178
Uniqueness of Photon Spheres in Static VacuumAsymptotically Flat Spacetimes
Carla Cederbaum
Abstract. Adapting Israel’s proof of static black hole uniqueness [12] weshow that the Schwarzschild spacetime is the only static vacuum asymptoti-cally flat spacetime that possesses a suitably defined photon sphere.
1. Introduction
The static spherically symmetric Schwarzschild black hole spacetime1 of mass
m > 0 can be represented as (L4:= R × (R3 \ B2m(0)), g), where the Lorentzian
metric g is given by
g = −N2dt2 +N
−2dr2 + r2Ω, N =
(1− 2m
r
)1/2
,(1.1)
with Ω denoting the canonical metric on S2. In these coordinates, the black holehorizon is given by the cylinder R × S22m = {r = 2m}. The timelike submanifold
P3:= R × S23m = {r = 3m} is called a photon sphere because any null geodesic
of (L4, g) that is initially tangent to P
3remains tangent to it. The Schwarzschild
photon sphere thus models (an embedded submanifold ruled by) photons spiralingaround the central black hole “at a fixed distance”.
Apart from its phenomenological significance for general relativity, theSchwarzschild photon sphere and its generalized analog in the Kerr spacetime arecrucially relevant for questions of dynamical stability in the context of the Einsteinequations, see e.g., [7]. It thus seems useful to understand photon spheres in moregenerality2.
2010 Mathematics Subject Classification. Primary 35Q75; Secondary 83C15, 83C20, 35H99,53A99, 53Z05.
Key words and phrases. General relativity, null geodesics, photon sphere, static spacetimes.The author was supported by the Robert Bosch Foundation. This material is based upon
work supported by the National Science Foundation under Grant No. 0932078 000, while theauthor was in residence at the Mathematical Sciences Research Institute in Berkeley, California,during the fall semester 2013.
1The same formula still defines a Schwarzschild spacetime if m < 0. The corresponding
metric is well-defined on L4= R × (R3 \ {0}) but possesses neither a black hole horizon nor a
photon sphere. If m = 0, the Schwarzschild spacetime degenerates to the Minkowski spacetime.2Clearly, from the perspective of stability, it will be necessary to understand the existence of
(generalized) photon spheres in dynamical or at least stationary, not only in static spacetimes.
c©2015 C. Cederbaum
51

52 CARLA CEDERBAUM
Photon spheres have also been studied in the context of gravitational lensing.There, they are related to the existence of relativistic images as was demonstratedby Virbhadra and Ellis [18,19] in the context of static spherically symmetric space-times. Building upon this work, Claudel, Virbhadra and Ellis [6] gave a geometricdefinition of photon spheres, again for static spherically symmetric spacetimes.
To the best of our knowledge, it is unknown whether more general spacetimescan possess (generalized) photon spheres, see p. 838 of [6]. We will address thisquestion for asymptotically flat static vacuum or AF-geometrostatic spacetimes.
In Section 2, we will give a geometric definition of photon spheres in AF-geometrostatic spacetimes. We will explain how our definition generalizes the onegiven in [6]. Our definition of photon spheres is related to constancy of the energy ofthe null geodesics generating the photon sphere (as observed by the static observersin the spacetime), see Lemma 2.7. In Section 3, we will prove that the only AF-geometrostatic spacetime admitting a photon sphere is the Schwarzschild spacetime:
Theorem 1.1. Let (L4, g) be an AF-geometrostatic spacetime possessing a pho-ton sphere P 3 ↪→ L4 with mean curvature H, arising as the inner boundary of L4.Assume that the lapse function N regularly foliates L4. Then H ≡ const and (L4, g)
is isometric to the Schwarzschild spacetime of the same mass m = 1/(√3H) > 0.
For this, we adapt Israel’s proof of uniqueness of black holes in asymptoticallyflat static vacuum spacetimes [12] (as exposed in Heusler [11]). As Israel, we willhave to assume that the lapse function regularly foliates the spacetime (at least inthe region exterior to the photon sphere). This is automatically true in a neigh-borhood of the asymptotic (spacelike) infinity if the ADM-mass of the spacetimeis non-zero, Lemma 2.4. Moreover, the assumption holds true in the Schwarzschildspacetime as well as in most known AF-geometrostatic spacetimes. In particular,this assumption restricts our attention to connected photon spheres that are indeedtopological spheres.
Israel’s result has been generalized in other directions, for example by Buntingand Masood-ul-Alam [3] and by Miao [14]. They generalized Israel’s static vac-uum black hole uniqueness theorem, removing the technical condition of the lapsefunction foliating the spacetime outside the horizon, and thus in particular al-lowing non-spherical and disconnected horizons a priori. Following the Buntingand Masood-ul-Alam approach, a priori disconnected and not necessarily sphericalphoton “spheres” will be addressed in [5], together with other results on photonsurfaces.
The author would like to thank Gregory Galloway and Gerhard Huisken forhelpful discussions.
2. Setup and definitions
Let us first quickly review the definition of and some facts about asymptoticallyflat static vacuum spacetimes. These model exterior regions of static configurationsof stars or black holes. See Bartnik [2] for a more detailed account of asymptoticallyflat Riemannian manifolds and harmonic coordinates as well as for the definitionof the weighted Sobolev spaces W k,p
−τ (E) we will use in the following. More detailsand facts on asymptotically flat static vacuum spacetimes can be found in [4].

UNIQUENESS OF PHOTON SPHERES 53
Definition 2.1 (AF-geometrostatic spacetimes and systems). A smooth Lorent-zian manifold or spacetime (L4, g) is called (standard) static if there is a smoothRiemannian manifold (M3, g) and a smooth lapse function N : M3 → R+ s. t.
L4 = R×M3, g = −N2dt2 + g,(2.1)
and vacuum if it satisfies the Einstein vacuum equation
Ric = 0,(2.2)
where Ric denotes the Ricci curvature tensor of (L4, g). We will sometimes callM3 a (time-)slice of L4, as it arises as M3 = {t = 0}, where t is considered as thetime variable of the spacetime. A static spacetime is called asymptotically flat ifthe manifold M3 is diffeomorphic to the union of a (possibly empty) compact setand an open end E3 which is diffeomorphic to R3 \ B, where B is the open unitball in R3. Furthermore, we require that the lapse function N , the metric g, andthe coordinate diffeomorphism Φ = (xi) : E3 → R3 \B combine s. t.
gij − δij ∈W k,2−τ (E)(2.3)
N − 1 ∈W k+1,2−τ (E)(2.4)
for some τ > 1/2, τ /∈ Z, k ≥ 3 and that Φ∗g is uniformly positive definite anduniformly continuous on R3 \B. Here, δ denotes the Euclidean metric on R3. Forbrevity, smooth3 asymptotically flat maximally extended4 static vacuum space-times will be referred to as AF-geometrostatic spacetimes, the associated triples(M3, g,N) will be called AF-geometrostatic systems. We will frequently use the
radial coordinate r :=√(x1)2 + (x2)2 + (x3)2 corresponding to the chosen coordi-
nates (xi).
Exploiting (2.1), the Einstein vacuum equation (2.2) reduces to
N Ric = ∇2N(2.5)
R = 0(2.6)
on M3, where∇2, Ric, and R denote the covariant Hessian, the Ricci, and the scalarcurvature of the metric g, respectively. Combining (2.5) and (2.6), one obtains
�N = 0(2.7)
on M3, where � denotes the Laplacian with respect to g. The static metricequations (2.5), (2.7) are a system of degenerate elliptic quasi-linear second or-der PDEs in the variables N and gij (with respect to for example g-harmonic
coordinates). Translating a result by Kennefick and O Murchadha [13] to our no-tation, we find that AF-geometrostatic systems are automatically asymptoticallySchwarzschildean:
Theorem 2.2 (Kennefick & O Murchadha). Let (M3, g,N) be an AF-geo-metrostatic system as in Definition 2.1 with an end E3, τ > 1/2, τ /∈ Z, and k ≥ 3.
3Muller zum Hagen [21] showed that static spacetimes with gij , N ∈ C3 are automatically
real analytic with respect to wave-harmonic coordinates if they solve (2.2), see also Footnote 5.4i.e., geodesically complete up to a possible inner boundary

54 CARLA CEDERBAUM
Then (M3, g,N) must be asymptotically Schwarzschildean, i.e., be such that g,Nsatisfy
gij − gij ∈W k,2−(τ+1)(E)(2.8)
N −N ∈W k+1,2−(τ+1)(E)(2.9)
with respect to g-wave harmonic coordinates5 with respect to the associated space-time metric g defined by (2.1). Here, N and g are the lapse function and theRiemannian metric corresponding to the Schwarzschild metric6 (1.1) of some massparameter m ∈ R.
Remark 2.3. A simple computation shows that the parameter m in Theo-rem 2.2 equals the ADM-mass of the spacetime for the definition of which we referthe reader to Arnowitt, Deser, and Misner [1].
In Theorem 3.1, we assume that the AF-geometrostatic spacetimes underconsideration are foliated by the level sets of the lapse function N (outside theirrespective photon spheres). This restricts the topology of M3 (outside the pho-ton sphere) to that of R3 \ B and the topology of the level sets of N in (L4, g)to R × S2. The Schwarzschild spacetime is clearly foliated in this way. Moreover,any AF-geometrostatic spacetime is foliated like this in a neighborhood of spatialinfinity:
Lemma 2.4. Let (M3, g,N) be an AF-geometrostatic system with non-vanishingADM-mass m. Then there exists a compact interior K ⊂M3 such that N foliatesthe slice M3 \K with spherical leaves and R×(M3 \K) ⊂ L4 with cylindrical leavesR× S2.
Proof. Theorem 2.2 tells us that
∂N
∂xi− mxi
r3∈W k,2
−τ−2(E)
holds in g-wave harmonic asymptotically flat coordinates in the end E of M3.Therefore, dN �= 0 holds in a neighborhood of infinity. By the implicit functiontheorem, N thus locally foliates M3 \ K for a suitably large compact interior K.The leaves of the foliation must be spherical as N = 1−m/r+O(r−2) is radial upto second order again by Theorem 2.2. �
2.1. Definition of photon surfaces and photon spheres. Let us nowproceed to defining photon spheres in AF-geometrostatic spacetimes. First, let usquickly review the history of the definition of photon spheres in static spacetimes7.In the context of static spherically symmetric spacetimes8, Virbhadra and Ellis[18,19] defined photon spheres to be timelike hypersurfaces of the form {r = r0},
5In [13], the condition on the coordinates is that they should be γ-harmonic with respect tothe conformally transformed metric γ := N2g. This is equivalent to them being g-wave harmonic,see e.g., Lemma 3.1.3 in [4].
6or N ≡ 1 and the Euclidean metric if m = 0.7In stationary non-static spacetimes, one cannot expect photon spheres to arise as embedded
submanifolds of the spacetime as the (angular) momentum of the spacetime will affect photonsorbiting in one way differently from those orbiting the other way, as is well-known for the Kerrspacetime, see e.g., O’Neill [16].
8not necessarily subject to Einstein’s equation

UNIQUENESS OF PHOTON SPHERES 55
where “r0 is the closest distance of approach for which the Einstein bending angleof a light ray is unboundedly large” (cited from [6]).
Claudel, Virbhadra and Ellis [6] have geometrized this definition of a photonsphere, again in the context of static spherically symmetric spacetimes. They firstdefine a photon surface to be an immersed no-where spacelike hypersurface Pn ofa general Lorentzian spacetime (Ln+1, g) such that every tangent vector X ∈ TPn
can be extended to a null geodesic γ : (−ε, ε) → Ln+1 remaining within Pn andsatisfying γ(0) = X. A photon sphere in a static spherically symmetric spacetime(Ln+1, g) is then defined as an R× SO(n)-invariant photon surface Pn ↪→ Ln+1.
To the best of our knowledge, it is an open question whether more generalspacetimes can possess photon spheres in this or in a generalized sense, see p. 838of [6]. We will address this question in the context of AF-geometrostatic spacetimes(L4, g) as defined in Definition 2.1.
Specializing the definition of Claudel, Virbhadra and Ellis [6], we make thefollowing definition of photon surfaces, see also Perlick [17].
Definition 2.5 (Photon surface). A timelike embedded hypersurface P 3 ↪→ L4
of an AF-geometrostatic spacetime (L4, g) is called a photon surface if and only ifany null geodesic initially tangent to P 3 remains tangent to P 3 as long as it exists.
The Schwarzschild photon sphere clearly is a photon surface in theSchwarzschild spacetime. Moreover, by spherical symmetry and strict monotonicityofN , a hypersurface of the form {r = r0} can also be written as {N = N0 := N(r0)}in the Schwarzschild spacetime. The same is true in all static spherically symmet-ric spacetimes and thus in the situation considered in [6] as long as N is strictlymonotone. We may thus consistently replace level sets of the radial variable rrelated to spherical symmetry by level sets of the lapse function N in a generalAF-geometrostatic spacetime. This allows us to make the following definition ofphoton spheres in AF-geometrostatic spacetimes.
Definition 2.6 (Photon sphere). Let (L4, g) be an AF-geometrostatic space-time, P 3 ↪→ L4 a photon surface. Then P 3 is called a photon sphere if the lapse func-tion N of the spacetime is constant along P 3 or in other words if P 3 = {N = N0}.
This clearly generalizes the definition of photon spheres given in [6], thus mak-ing the Schwarzschild photon sphere a photon sphere in our sense in particular.Moreover, our definition extends certain physical properties of the Schwarzschildphoton sphere; the condition that the lapse function N be constant along the pho-ton sphere hence is not merely a technical extension of the spherically symmetriccase. It has in fact a very immediate physical interpretation: The energy E andthe associated frequency ν = E/� of a null geodesic (photon) γ observed by thestatic observers N−1∂t is constant if and only if N is constant along the geodesicγ, see Lemma 2.7 below. Hence all null geodesics tangent to a photon surface P 3
have constant energy in the eyes of the static observers 1N ∂t if and only if the lapse
function is constant along the photon surface.This constant energy is a main reason why the photon sphere in the
Schwarzschild spacetime makes the analysis of dynamical stability difficult: Theenergy of photons and thus also of waves traveling with speed of light does notdisperse along the photon sphere. It thus seems justified to generalize theSchwarzschild photon sphere and the notion of photon sphere defined in [6] bydefining photon spheres P 3 as photon surfaces satisfying P 3 = {N = N0}.

56 CARLA CEDERBAUM
Lemma 2.7 (Constant energy). Let (L4, g) be an AF-geometrostatic spacetimeand γ a null geodesic in (L4, g). Then the energy and frequency of γ observed bythe static observers N−1∂t,
E := g(γ, N−1∂t) and ν := E/�,(2.10)
are constant along γ if and only if N ◦ γ ≡ N0 for some N0 ∈ R.
Proof. Using the warped structure of the spacetime (2.1) to decompose thegeodesic γ = (t, x), the geodesic equation γ = 0 implies
0 = (γ)t = t+2 ˙(N ◦ γ) t
N ◦ γ .(2.11)
This can be explicitly solved to say t = C (N ◦ γ)−2 for some constant C ∈ R. Inconsequence, (2.10) simplifies to �ν = E = −C (N ◦ γ)−1 which is constant alongγ if and only if N ◦ γ ≡ N0 for some N0 ∈ R. �
2.2. Notation and conventions. Our sign convention is such that the Riccitensor Ric is constructed from the Riemannian curvature endomorphism Rm via
Ricij = Rmkijk.(2.12)
The second fundamental form II of an isometric embedding (An, a) ↪→ (Bn+1, b)of semi-Riemannian manifolds with corresponding unit normal vector field η reads
II(X,Y ) := b(b∇Xη, Y )(2.13)
for all X,Y ∈ Γ(An), irrespective of the sign τ := b(η, η). We will make use of thecontracted Gauß equation
bR− 2τ bRic(η, η) = aR− τ (atr II)2 + τ |II|2,(2.14)
where the left upper indices indicate the metric from which a certain covariantderivative or curvature tensor is constructed. Also, we will use the Codazzi equation
b( bRm(X,Y, η), Z) = (a∇XII) (Y, Z)− (a∇Y II) (X,Z)(2.15)
for all X,Y, Z ∈ Γ(An). Moreover, if τ = 1, we have
b�f = a�f + b∇2f(η, η) + (atr II) η(f)(2.16)
for every smooth f : Bn+1 → R. On 3-dimensional manifolds (A3, a), we willexploit the fact that the Weyl tensor vanishes so that the Riemann endomorphismcan be algebraically reconstructed from the Ricci tensor and the metric via theKulkarni-Nomizu product
aRmijkl = aRici
lajk − aRicikalj − aRicj
laik +aRicjkali −
aR
2
(δliajk − aikδ
lj
).
(2.17)
In the proof of Theorem 3.1, we will use the following notation for objectsdefined within a given AF-geometrostatic spacetime (L4, g): The 2-dimensionalintersection of the photon sphere P 3 and the time slice M3 is called Σ2. The levelsets of the lapse function N within the time slice M3 will be called Σ2
N , so thatΣ2 =: Σ2
N0for some N0 ∈ R+ as, by definition, the photon sphere is a level set of N .
Recall that the surfaces Σ2N and hence also Σ2 must be of spherical topology as N is
assumed to regularly foliate the spacetime and thus also the embedded submanifoldM3 and because of Lemma 2.4 – at least if the mass m of the spacetime is non-zero.

UNIQUENESS OF PHOTON SPHERES 57
Tensor fields naturally living on the spacetime (L4, g) such as the Riemanncurvature endomorphism Rm, the Ricci curvature Ric, the scalar curvature R etc.will be denoted in gothic print. In the following table, the metric induced on thephoton sphere P 3 will be denoted by p and the induced metric on Σ2 by σ.
name manifold metric tensors/operators indices
spacetime L4 = R×M3 g Ric, g∇, . . . α, β, . . .
photon sphere P 3 = R× Σ2 p pRic, p∇, . . . a, b, . . .
time slice M3 g gRic, g∇, . . . i, j, . . .
photon sphere (base) Σ2 = Σ2N0
σ σRic, σ∇, . . . I, J, . . .
N -level in M3 Σ2N σ σRic, σ∇, . . . I, J, . . .
Table 1. Notational conventions for manifolds, metrics, induced tensor fields,induced differential operators, and coordinate indices.
We will also need to handle several second fundamental forms and unit normalvector fields. The second fundamental form of (P 3, p) ↪→ (L4, g) will be called h,the mean curvature H, and the corresponding outward unit normal will be calledν. The second fundamental form of (M3, g) ↪→ (L4, g) vanishes as the spacetimeis static and the slice is ‘canonical’ and thus time-symmetric. The correspondingfuture pointing unit normal field is N−1∂t. Similarly, the second fundamental formof (Σ2, σ) ↪→ (P 3, p) vanishes, the future pointing unit normal is again N−1∂t.Finally, the second fundamental form of (Σ2, σ) ↪→ (M3, g) will be denoted by h,the mean curvature by H, the outward unit normal coincides with ν. The samenotation will be used for (Σ2
N , σ), see the following table. The trace-free part of a
symmetric (0, 2)-tensor T will be denoted by◦T .
embedding second fund. form mean curvature normal vector
(P 3, p) ↪→ (L4, g) h H ν
(M3, g) ↪→ (L4, g) 0 0 N−1∂t
(Σ2, σ) ↪→ (P 3, p) 0 0 N−1∂t
(Σ2, σ) ↪→ (M3, g) h H ν
(Σ2N , σ) ↪→ (M3, g) h H ν
Table 2. Notational conventions for second fundamental form, mean curvature,and normal vectors.

58 CARLA CEDERBAUM
3. Proof of the main theorem
This section is dedicated to the proof of the following ’static photon sphereuniqueness theorem’:
Theorem 3.1. Let (L4, g) be an AF-geometrostatic spacetime possessing a pho-ton sphere P 3 ↪→ L4 with mean curvature H, arising as the inner boundary of L4.Assume that the lapse function N regularly foliates L4. Then H ≡ const and (L4, g)
is isometric to the Schwarzschild spacetime of the same mass m = 1/(√3H) > 0.
We will rely on the following proposition which is well-known in the literature,cf. e.g., [6, Theorem II.1] or [17, Proposition 1].
Proposition 3.2. Let (L4, g) be an AF-geometrostatic spacetime and P 3 ↪→ L4
an embedded timelike hypersurface. Then P 3 is a photon surface if and only if it istotally umbilic, i.e., iff its second fundamental form is pure trace.
The following proposition asserts that photon spheres in AF-geometrostaticspacetimes have constant mean and constant scalar curvature. This is a specialcase of a more general fact about semi-Riemannian Einstein manifolds.
Proposition 3.3. Let n ≥ 2 and let (Ln+1, g) be a smooth semi-Riemannianmanifold possessing an embedded totally umbilic hypersurface (Pn, p) ↪→ (Ln+1, g),so that the second fundamental form h is pure trace and thus satisfies
h =H
np,(3.1)
where H denotes the mean curvature of Pn. If the semi-Riemannian manifold(Ln+1, g) is Einstein or in other words if Ric = Λg for some constant Λ ∈ R, thenPn has constant mean curvature and constant scalar curvature
pR ≡ (n+ 1− 2τ )Λ + τn− 1
nH2,(3.2)
where τ := g(η, η). In particular, photon surfaces (and thus photon spheres) inAF-geometrostatic spacetimes are CMC and have constant scalar curvature
pR ≡ 2
3H2.(3.3)
Proof. Using (3.1) and denoting the unit normal to Pn (corresponding to h)by η, the Codazzi equation (2.15) reduces to
g(Rm(X,Y, η), Z) = (p∇Xh) (Y, Z)− (p∇Y h) (X,Z)(3.4)
= X(H/n) p(Y, Z)− Y (H/n) p(X,Z)
for all X,Y, Z ∈ Γ(TPn). Contracting the X and Z slots and exploiting the anti-symmetry of Rm, namely that g(Rm(η, Y, η), η) = 0, we obtain
Ric(Y, η) = Y (H/n)− nY (H/n) = (1− n)Y (H/n)(3.5)
for all Y ∈ Γ(TPn). The left hand side of (3.5) vanishes as g is Einstein andg(Y, η) = 0 which proves that Pn is CMC as Y ∈ Γ(TPn) was arbitrary. Further-more, by the Gauß equation (2.14) and (3.1), we find that
R− 2τ Ric(η, η) = pR− τ H2 + τ |h|2(3.6)
= pR− τ H2 + τ (H2/n)
= pR− τn− 1
nH2.

UNIQUENESS OF PHOTON SPHERES 59
As g is Einstein, we have Ric(η, η) = τ Λ and R = (n + 1)Λ. Equation (3.6) thussimplifies to (3.2) so that (Pn, p) has constant scalar curvature as claimed.
Finally, AF-geometrostatic spacetimes are clearly Einstein with Λ = 0 by theEinstein vacuum equation (2.2). Thus, by Proposition 3.2, photon surfaces (andhence photon spheres) in AF-geometrostatic spacetimes are CMC and have constantscalar curvature as in (3.3). �
Let us now proceed to prove Theorem 3.1.
Proof of Theorem 3.1. Let (L4, g) be an AF-geometrostatic spacetime asin the statement of the theorem, and let P 3 = R × Σ2 =: R × Σ2
N0be the photon
sphere arising as the inner boundary of L4. Let us first of all compute the secondfundamental form h of (Σ2, σ)→ (M3, g). For X,Y ∈ Γ(TΣ2), we find
h(X,Y ) = g(g∇Xν, Y ) = g(g∇Xν, Y ) = h(X,Y ) = H p(X,Y )/3 = Hσ(X,Y )/3,
where we have used that (M3, g) is time-symmetric and that (P 3, p) is totallyumbilic in (L4, g) by Proposition 3.2. As H is constant by Proposition 3.3, thisimplies
h =H
3σ and thus H ≡ 2
3H,(3.7)
so that the embedding (Σ2, σ) ↪→ (M3, g) is totally umbilic and CMC. We will fromnow on write H0 := H = 2H/3. Using this information in the Codazzi-equation(2.15), we get g(gRm(X,Y, ν), Z) = 0 for all X,Y, Z ∈ Γ(TΣ2) and thus
gRic(X, ν) = 0(3.8)
for all X ∈ Γ(TΣ2) by contracting the X and Z slots and using the symmetry ofthe Riemann tensor. From (3.8) and the static metric equation (2.5), we deduce
X(ν(N)) = X(ν(N))− (g∇Xν) (N) = g∇2N(X, ν) = N gRic(X, ν) = 0(3.9)
for all X ∈ Γ(TΣ2) as N is constant along Σ2 by definition of photon spheres.This shows that ν(N) ≡: [ν(N)]0 is constant along Σ2. From (2.7) and (3.9), itcan be seen that the mass parameter m from Theorem 2.2 (or in other words theADM-mass of (M3, g)) satisfies
m =1
4π
∫Σ2
ν(N) dμ =|Σ2|σ4π
[ν(N)]0 ,(3.10)
where μ denotes the area measure with respect to σ, see also Section 4.2 in [4].
Why the mass m and ν(N) are non-zero. Observe that |ν(N)| = |dN |g onevery level set Σ2
N of N in M3. Thus ν(N) �= 0 on Σ2N follows from the assumption
that N regularly foliates M3. This9 ensures m �= 0 by (3.10).By the maximum principle for elliptic PDEs (see e.g., [10]), by (2.6), and
by the asymptotic condition that N → 1 as r → ∞ required in the definitionof AF-geometrostatic systems, Definition 2.1, N will have values in the intervalI := [N0, 1) or in the interval I := (1, N0], where N0 < 1 corresponds to positiveand N0 > 1 corresponds to negative mass m, see Lemma 2.4.
9Alternatively, m = 0 implies that g is flat by (2.5), (3.10), and (2.17), so that the spacetime issome exterior region of the Minkowski spacetime. The photon surfaces of the Minkowski spacetimeare well-understood, see e.g., [15]; in particular, the Minkowski spacetime does not possess aphoton sphere in our sense.

60 CARLA CEDERBAUM
It will be convenient to use the area radius of Σ2N and Σ2 = Σ2
N0, defined by
r(N) :=√|Σ2
N |σ/4π and r0 := r(N0).(3.11)
Applying (2.16) to f = N on (M3, g) and using (3.9), (2.5), (2.7), and (3.7),we find that
N0gRic(ν, ν) ≡ −H0 [ν(N)]0 .(3.12)
When plugging this into the Gauß equation (2.14) and remembering (2.6) and (3.7),one gets
N0σR ≡ −2N0
gRic(ν, ν) +N0H20/2 ≡ 2H0 [ν(N)]0 +N0H
20/2.(3.13)
The Gauß-Bonnet theorem allows us to integrate (3.13) so that
4N0 = 4mH0 + r20N0H20(3.14)
by (3.10) and (3.11). The Gauß equation (2.14) for (Σ2, σ) ↪→ (P 3, p) implies that
pR+ 2 pRic
(1
N∂t,
1
N∂t
)= σR,(3.15)
on Σ2N0
. We know from Proposition 3.3 that pR = 2H2/3. The structure of themetric p implies
pRic
(1
N∂t,
1
N∂t
)=
σ�N
N= 0(3.16)
on Σ2 = Σ2N0
. Thus, (3.15) allows to compute
σR = pR = 2H2/3.(3.17)
The Gauß-Bonnet theorem leads to the explicit expression
H r0 = ±√3(3.18)
so that in particular H �= 0. Finally, from (3.14), (3.18), and (3.7), we find
0 < N0 = mH.(3.19)
Handling the sign of m and ν(N). Other than it is done in Israel’s analysis,we explicitly include the case of negative10 mass m or in other words a priori allowν(N) < 0 and H < 0 along the photon sphere (by (3.10), (3.19), and (3.7)). Infact, this possibility can be ruled out by known results on the existence of outertrapped surfaces in static spacetimes, see Galloway [9]. This implies that no smoothclosed surface of constant negative mean curvature can be embedded into an AF-geometrostatic system as its inner boundary. However, we will not appeal to thosearguments for the sake of demonstrating that our Israel style approach is flexibleenough to directly handle negative mass/constant mean curvature of the photonsphere.
10Observe that m = 0 has been ruled out above.

UNIQUENESS OF PHOTON SPHERES 61
Rewriting the metric g in adapted coordinates. The next step imitates Israel’sargument for static black hole uniqueness [12] (as exposed in Heusler [11]). Because|ν(N)| = |dN |g �= 0 on M3, the function ρ : M3 → R+ given by
ρ(x) := (| ν(N)|x |)−1 for all x ∈M3(3.20)
is well-defined. As N regularly foliates M3, we can extend any coordinate system(yI), I = 1, 2 on U ⊂ Σ2
N0to the cylinder I×U by letting it flow along the (nowhere
vanishing) gradient of N . By construction, the metric g reads
g = ρ2 dN2 + σ,(3.21)
where σ is the 2-metric induced on Σ2N (and depends on N !). As ν(N) �= 0, we
can define a global sign
λ :≡ sign(ν(N)) = sign(m) = sign(H) = sign(H0)(3.22)
by (3.10), (3.19), and (3.7).In these variables, the static metric equations (2.5), (2.7) imply the following
identities
0 =λ
ρ
(H
N−H,N −
λρ
2H2
)− 2√ρ
2�√ρ− 1
2
[|σgradρ|2σ
ρ2+ 2|
◦h|2σ
](3.23)
0 =λ
ρ
(3H
N−H,N
)− σR− 2� ln ρ−
[|σgradρ|2σ
ρ2+ 2|
◦h|2σ
](3.24)
0 = ρ,N −λρ2H(3.25)
on any level set of N . Let s := det(σIJ). By definition of the second fundamentalform h, we have (
√s),N = λ
√sHρ. Using (3.25) and non-negativity of the terms
in square brackets, we obtain the following inequalities from (3.23) and (3.24):
∂N
(λ√sH
√ρN
)≤ −2
√s
N2�√ρ,(3.26)
∂N
(√s
ρ
[HN +
4λ
ρ
])≤ −N
√s(2� ln ρ+ σR
),(3.27)
holding on Σ2N . In these inequalities, equality holds if and only if the square brackets
in (3.23) and (3.24) vanish, i.e., iff ν(N) ≡ const and◦h = 0 on the given level set.
Integrating (3.26) from N0 to 1 and subsequently over Σ2 (using a partition of unitycorresponding to coordinate patches U ⊂ Σ2), we get
λ
[1
N
∫Σ2
N
H√ρ
dμN
]1
N0
≤ −2∫ 1
N0
1
N
∫Σ2
N
2�√ρ dμN dN = 0(3.28)
from Fubini’s theorem, where μN denotes the area measure w. r. t. σ on Σ2N . The
right-hand side of (3.28) vanishes by the divergence theorem. Now H, ρ ≡ conston Σ2
N0by (3.7) and (3.9). Moreover, Theorem 2.2 and Lemma 2.4 allow us to
compute that H = 2r +O(r−2) and ρ(N) = r2
|m| + O(r) asymptotically as r → ∞.
Combining this with (3.28) and the definition of the area radius (3.11), we find
4πr20H0
√λ [ν(N)]0
N0λ ≥ lim
r→∞
λ
N
∫Σ2
N
H√
λ ν(N) dμN = 8π√|m|λ,(3.29)

62 CARLA CEDERBAUM
where H0 denotes the mean curvature of Σ2N0
. Using (3.10), this simplifies to
λ (2N0 − r0H0) ≤ 0.(3.30)
Furthermore, by Fubini’s theorem, the divergence theorem, and the Gauß-Bonnet theorem, integrating inequality (3.27) from N0 to 1 and subsequently overΣ2 (with a partition of unity as before) gives[ ∫
Σ2N
1
ρ
[HN +
4λ
ρ
]dμN
]1
N0
≤ −∫ 1
N0
N
∫Σ2
N
(2� ln ρ+ σR
)dμN dN(3.31)
= −8π∫ 1
N0
N dN = −4π(1−N20 ).(3.32)
Again making use of the discussed asymptotics, (3.9), and (3.7), we obtain
λ [ν(N)]0 [H0N0 + 4 [ν(N)]0] |Σ2N0| ≥ 4π(1−N2
0 ).(3.33)
By (3.10) and (3.11), this simplifies to
|m|[H0N0 +
4m
r20
]≥ 1−N2
0 .(3.34)
Using (3.7), (3.18), and (3.19), we find
r20 ≤ (6λ+ 3)m2
which rules out λ = −1. Thus, m > 0 and H > 0 by (3.22). We now estimate onthe one hand that
1(3.14)=
1
4N0
(4mH0 + r20N0H
20
) (3.30)
≥ 2m
r0+N2
0 ⇔ N20 ≤ 1− 2m
r0(3.35)
and on the other hand that
2(3.14)=
1
2N0
[4mH0 + r20N0H
20
]=
H0r20
2N0
[H0N0 +
4m
r20
](3.36)
(3.34)
≥ H0r20(1−N2
0 )
2mN0
(3.30)
≥ (1−N20 )r0
m
⇔ N20 ≥ 1− 2m
r0.
Combining (3.35) and (3.36) gives N0 =√1− 2m/r0 just as in Schwarzschild.
Both inequalities (3.35) and (3.36) are sharp so that H0 = 2N0/r0. This, together
with (3.18), (3.19), and (3.7) gives m = 1/(√3H) > 0 so that the parameter H > 0
determines the (positive) mass of the spacetime.As discussed above, this also implies equality in both (3.26) and (3.27) which
gives us◦h ≡ 0 and ρ ≡ const on every Σ2
N . By (3.25), we find that H must alsobe constant on every Σ2
N . Equations (3.24) and (3.23) then imply that the Gaußcurvature must be constant on every level Σ2
N . This, in turn, tells us that σ = r2Ωon Σ2
N with r = r(N) by the uniformization theorem, with Ω the canonical metricon S2 as above. From (3.10), we know that ρ = r2/m. Using this and the area

UNIQUENESS OF PHOTON SPHERES 63
radius r(N) defined in (3.11), (3.25) implies drdN > 0 if H > 0 on Σ2
N . However,(3.23) can be integrated explicitly to say
H = AN exp
(−
∫ N
N0
(ρH) dN
)(3.37)
on Σ2N for some A ∈ R. As H0 > 0, also A > 0 and thus H > 0 on all Σ2
N . Thusr(N) is invertible, and we denote its inverse function by N(r).
At this point, we know by the chain rule that
g = ρ(N(r))2 (N ′(r))2 dr2 + r2Ω,(3.38)
where N ′ is the r-derivative of N . This shows that the spacetime is sphericallysymmetric so that the claim follows from a direct computation or from Birkhoff’stheorem, see e.g., [20]. For the sake of completeness, we will demonstrate the directcomputation, here:
Equation (3.25) tells us that H = 2m/(r3N ′) by the chain rule, where N ′ mustbe non-zero as N is invertible. This and (3.23) combine to an ODE for N , namely
N N ′′ = −2N
rN ′ − (N ′)2 ⇔ u′′ = −2u′/r,(3.39)
using u := N2. This ODE can be solved explicitly to read N(r) =√
A+B/r withA,B ∈ R. From the asymptotic convergence N → 1 as r → ∞, we deduce A = 1.The explicit value N0 =
√1− 2m/r0 allows us to compute B = −2m so that
N(r) =√
1− 2m/r and thus(3.40)
g = ρ(N(r))2 (N ′(r))2 dr2 + r2Ω =1
N2dr2 + r2Ω.(3.41)
This proves that the spacetime (L4) is isometric to (an exterior region of) the
Schwarzschild black hole spacetime (L4, g) from (1.1) of mass m = 1√
3H> 0. �
References
[1] R. Arnowitt, S. Deser, and C. W. Misner, Coordinate invariance and energy expressions ingeneral relativity., Phys. Rev. (2) 122 (1961), 997–1006. MR0127946 (23 #B991)
[2] Robert Bartnik, The mass of an asymptotically flat manifold, Comm. Pure Appl. Math. 39(1986), no. 5, 661–693, DOI 10.1002/cpa.3160390505. MR849427 (88b:58144)
[3] Gary L. Bunting and A. K. M. Masood-ul-Alam, Nonexistence of multiple black holes inasymptotically Euclidean static vacuum space-time, Gen. Relativity Gravitation 19 (1987),no. 2, 147–154, DOI 10.1007/BF00770326. MR876598 (88e:83031)
[4] Carla Cederbaum, The Newtonian Limit of Geometrostatics, Ph.D. thesis, FU Berlin, 2012,arXiv:1201.5433v1.
[5] Carla Cederbaum and Gregory J. Galloway, Uniqueness of photon spheres via positive massrigidity, arXiv:1504.05804.
[6] Clarissa-Marie Claudel, K. S. Virbhadra, and G. F. R. Ellis, The geometry of photon surfaces,J. Math. Phys. 42 (2001), no. 2, 818–838, DOI 10.1063/1.1308507. MR1809255 (2002a:83051)
[7] Mihalis Dafermos and Igor Rodnianski, Lectures on black holes and linear waves, Evolutionequations, Clay Math. Proc., vol. 17, Amer. Math. Soc., Providence, RI, 2013, pp. 97–205.MR3098640
[8] Theodore Frankel, Gravitational Curvature: An Introduction to Einstein’s Theory, DoverBooks on Physics, 2011.
[9] Gregory J. Galloway, On the topology of black holes, Comm. Math. Phys. 151 (1993), no. 1,53–66. MR1201655 (93k:83047)
[10] David Gilbarg and Neil S. Trudinger, Elliptic Partial Differential Equations of Second Order,2nd ed., Springer, 1970.

64 CARLA CEDERBAUM
[11] Markus Heusler, Black hole uniqueness theorems, Cambridge Lecture Notes in Physics, vol. 6,Cambridge University Press, Cambridge, 1996. MR1446003 (98b:83057)
[12] Werner Israel, Event horizons in static vacuum space-times, Phys. Rev. 164 (1967), no. 5,1776–1779.
[13] Daniel Kennefick and Niall O Murchadha, Weakly decaying asymptotically flat static andstationary solutions to the Einstein equations, Classical Quantum Gravity 12 (1995), no. 1,149–158. MR1314057 (95m:83032)
[14] Pengzi Miao, A remark on boundary effects in static vacuum initial data sets, Classical Quan-tum Gravity 22 (2005), no. 11, L53–L59, DOI 10.1088/0264-9381/22/11/L01. MR2145225(2006f:83016)
[15] Barrett O’Neill, Semi-Riemannian geometry, Pure and Applied Mathematics, vol. 103, Aca-demic Press, Inc. [Harcourt Brace Jovanovich, Publishers], New York, 1983. With applicationsto relativity. MR719023 (85f:53002)
[16] Barrett O’Neill, The Geometry of Kerr Black Holes, Dover Books on Physics, 1992.[17] Volker Perlick, On totally umbilic submanifolds of semi-riemannian manifolds, Nonlinear
Analysis 63 (2005), no. 5-7, e511–e518.[18] K. S. Virbhadra and George F. R. Ellis, Schwarzschild black hole lensing, Phys. Rev. D (3)
62 (2000), no. 8, 084003, 8, DOI 10.1103/PhysRevD.62.084003. MR1804056 (2001k:83079)[19] K. S. Virbhadra and G. F. R. Ellis, Gravitational lensing by naked singularities, Phys.
Rev. D (3) 65 (2002), no. 10, 103004, 10, DOI 10.1103/PhysRevD.65.103004. MR1918992(2004b:83087)
[20] Robert M. Wald, General relativity, University of Chicago Press, Chicago, IL, 1984.MR757180 (86a:83001)
[21] H. Muller zum Hagen, On the analyticity of static vacuum solutions of Einstein’s equations,Proc. Cambridge Philos. Soc. 67 (1970), 415–421. MR0280155 (43 #5876)
Mathematics Department, Universitat Tubingen, Germany
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13179
The L1 Liouville Property on Weighted Manifolds
Nelia Charalambous and Zhiqin Lu
Abstract. We consider a complete noncompact smooth metric measurespace (Mn, g, e−fdv) and the associated drifting Laplacian. We findsufficient conditions on the geometry of the space so that every nonnegativef -subharmonic function with bounded weighted L1 norm is constant.
1. Introduction
We consider a complete noncompact smooth metric measure space
(Mn, g, e−fdv),
where (Mn, g) is a complete noncompact smooth Riemannian manifold with aweighted volume measure dμ = e−fdv such that f is a smooth function on Mand dv is the Riemannian measure. In this paper, we refer to such a space as aweighted manifold.
The associated drifting Laplacian on such a weighted manifold is
Δf = Δ−∇f · ∇,
where Δ is the Laplace operator and ∇ is the gradient operator on the Riemannianmanifold M . Δf can be extended to a densely defined, self-adjoint, nonpositivedefinite operator on the space of square integrable functions with respect to themeasure dμ. A smooth function u is called f -harmonic, whenever
Δfu = 0
and f -subharmonic ifΔfu ≥ 0.
We use 〈 , 〉 to denote the inner product of the Riemannian metric and | · | todenote the corresponding norm. The weighted Lp norms are defined as
‖u‖p =
(∫M
|u|p e−f dv
)1/p
for any 1 ≤ p <∞. The weighted Lp space is then given by
Lp(M, e−fdv) = {u∣∣ ‖u‖p <∞}.
2010 Mathematics Subject Classification. Primary 53C21; Secondary 58J35.Key words and phrases. Drifting Laplacian, Liouville property, mean value inequality, heat
kernel.The second author is partially supported by the DMS-12-06748.
c©2015 N. Charalambous, Z. Lu
65

66 NELIA CHARALAMBOUS AND ZHIQIN LU
We say that the weighted manifold satisfies the L1 Liouville property if everynonnegative f -subharmonic function that belongs to L1 is constant. In this article,we are interested in finding sharp conditions on the curvature of the weightedmanifold and f so that it satisfies the L1 Liouville property.
In the classical case f = 0, P. Li demonstrated that a manifold satisfies theL1 Liouville property whenever its Ricci curvature is bounded below by a negativequadratic function: Ric(x) ≥ −C(1 + r(x)2), where r(x) = d(x, xo) is the distanceto a fixed point xo [4]. This is achieved by proving an appropriate mean valueinequality for subharmonic functions and finding adequate heat kernel bounds ongeodesic balls at xo. The main ingredients in the proof of both the mean valueinequality and the heat kernel bound were the Bochner formula, the Laplaciancomparison theorem and volume comparison for general geodesic balls. The lowerbound on the Ricci curvature is sharp as is shown in [6].
In the case of weighted manifolds, it was shown by Bakry and Emery that theanalogous Bochner formula can be obtained if one takes as the curvature tensor
Ricf = Ric +∇2f
where Ric is the Ricci curvature of the Riemannian manifold and ∇2f is the Hessianof the function f [1]. Ricf is known as the Bakry-Emery Ricci curvature. However,the Bochner formula for the drifting Laplacian remains slightly different. It is givenby
(1) Δf |∇u|2 = 2|∇2u|2 + 2〈∇u,∇Δfu〉+ 2Ricf (∇u,∇u),
where ∇2u is the Hessian of u and |∇2u|2 =∑
u2ij . We do not have a notion of
f -Hessian and what appears in the above Bochner formula for the drifting Laplacianis the usual Hessian. Observe that when f = 0, (1) becomes the Bochner formulain the Riemannian case.
It was previously shown that the weighted manifold satisfies the L1 Liouvilleproperty whenever Ricf ≥ 0 and f has quadratic growth [14], and also wheneverRicf (x) ≥ −K(1 + r(x)2) and f is bounded [13]. In this article, we will prove thefollowing more general result
Theorem 1.1. Let (Mn, g, dμ) be a complete metric measure space with dμ =e−fdv and fix a point xo ∈M . Suppose that for all R > 1 the manifold satisfies theweighted volume form condition (VR) as in Definition 2.1 with A(R) = bR2 andsome uniform constants a, b that do not depend on R.
Then every nonnegative f -subharmonic function in L1 must be constant.
As we will see, our result indicates that the weighted manifold will satisfy theL1 Liouville property under various conditions on the Bakry-Emery Ricci tensorand f that guarantee the following basic principle: geodesic balls of radius r have
weighted volume growth of the order ecR2
, and the mean value inequalities and heat
kernel estimates also hold on geodesic balls with the additional factor of ecR2
. InSection 2 we obtain a mean value inequality for f -subharmonic functions, as well asGaussian estimates for the drifting heat kernel under a more general volume formcondition. We provide the proof of Theorem 1.1 in Section 3. In Section 4, we giveconditions on Ricf and f that guarantee the assumptions of the theorem and inthe final section we show that the above conditions are sharp.

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 67
2. Mean Value Inequality and Heat Kernel Estimate
We fix a point xo ∈ M and set r(x) = d(x, xo), the radial distance to xo. Wedenote the geodesic ball of radius R at x by Bx(R), and its volume in the weightedmeasure by Vf (x,R).
Using the classical Li-Yau method, one can obtain gradient estimates and meanvalue inequalities for subharmonic functions whenever Δr(x, y) ≤ a
r(x,y) + b for
some uniform constants a, b (here r(x, y) = d(x, y)). Such a uniform Laplaciancomparison theorem is easy to obtain in the case f = 0, by simply assuming thatthe Ricci curvature of the manifold is bounded below. In the case of weightedmanifolds however, Ricf (x) ≥ −(n − 1)K on a ball around xo does not imply auniform Laplacian estimate Δfr(x, y) ≤ C 1
r(x,y) + b without strong restrictions on
f .In this article, we will use an alternative technique based on the method of
Saloff-Coste [11], and which was also explored in [13,14]. As in the case f = 0, wecan prove a local Neumann Poincare inequality for smooth functions in (Mn, g, dμ),whenever we can compare the volume form of the weighted manifold to the volumeform of an a-dimensional manifold with Ricci curvature bounded below. This isdone by following the proof of Theorem 5.6.5 in [11]. Furthermore, we can prove alocal Sobolev inequality in a similar manner. The Sobolev inequality then implies amean value inequality for f -subharmonic functions as well as a mean value inequal-ity for solutions to the drifting heat equation. We use these to prove a Gaussianestimate for the drifting heat kernel.
For any point, x ∈ M we denote the Riemannian volume form in geodesiccordinates at x by
dv(expx(rξ)) = J(x, r, ξ) dr dξ
for r > 0 and ξ any unit tangent vector at x. Then the f -volume form in geodesiccoordinates is given by
Jf (x, r, ξ) = e−fJ(x, r, ξ).
If y = expx(rξ) is a point that does not belong to the cut-locus of x, then
Δr(x, y) =J ′(x, r, ξ)
J(x, r, ξ)and Δfr(x, y) =
J ′f (x, r, ξ)
Jf (x, r, ξ)
where r(x, y) = d(x, y) and the derivatives are taken in the radial direction. Thefirst equality is the key element in Bishop’s volume comparison theorem underthe assumption of a uniform Laplacian upper bound. Analogously, on weightedmanifolds, the second equality provides us with weighted volume comparison resultswhenever we have a uniform drifting Laplacian upper bound. We will be showingthat it is in fact sufficient to have a uniform volume form comparison assumption.
Definition 2.1. We say that the smooth metric measure space (Mn, g, dμ)satisfies the property (VR), if there exists a positive and nondecreasing functionA(R) and a uniform constant a (independent of R) such that for all x ∈ Bxo
(R)and 0 < r1 < r2 < R
(VR)Jf (x, r2, ξ)
Jf (x, r1, ξ)≤
(r2r1
)a
eA(R).
The above inequality is assumed for all points expx(riξ) that do not belong to thecut locus of x.

68 NELIA CHARALAMBOUS AND ZHIQIN LU
The classical integration argument in Bishop’s theorem gives us the followingvolume comparison result
Lemma 2.2. Suppose that (Mn, g, dμ) satisfies the property (VR) for all x ∈Bxo
(R). Then, for any 0 < r1 < r2 < R
Vf (x, r2)
Vf (x, r1)≤
(r2r1
)a+1
eA(R).
As mentioned above, the proof in [11, Theorem 5.6.5] illustrates that assump-tion (VR), and the consequent volume comparison result that follows from it, areenough to prove a local Neumann Poincare inequality on the weighted manifold(see also the proof in [8, Lemma 3.4] and [14, Lemma 2.3], and[13, Lemma 2.4]).The local Sobolev inequality then follows as in [10, Theorem 2.1]. We summarizethese results below
Lemma 2.3. Let (Mn, g, dμ) be a metric measure space that satisfies the prop-erty (VR) for all x ∈ Bxo
(R). Then for any x ∈ Bxo(R), 0 < r < R and
ϕ ∈ C∞(Bx(r))∫Bx(r)
|ϕ− ϕBx(r)|2 dμ ≤ C1eC2A(R) r2
∫Bx(r)
|∇ϕ|2 dμ
where C1 = C1(n, a), C2 = C2(n) and ϕBx(r) = Vf (x, r)−1
∫Bx(r)
ϕdμ.
Furthermore, there exist constants ν = ν(n) > 2, C3(n, a) and C4(n) such thatfor all ϕ ∈ C∞0 (Bx(r))
(2)
(∫Bx(r)
|ϕ| 2νν−2 dμ
) ν−2ν
≤ C3eC4A(R) r2
Vf (x, r)2ν
∫Bx(r)
( |∇ϕ|2 + r−2|ϕ|2 ) dμ.
As in the articles mentioned above, we can now use the Sobolev inequalityto prove a local mean value inequality for positive solutions of the drifting heatequation [10, Theorem 3.1], [14, Proposition 2.6].
Lemma 2.4. Let (Mn, g, dμ) be a smooth metric measure space that satisfies thelocal Sobolev inequality (2) of Lemma 2.3 for all ϕ ∈ C∞0 (Bxo
(ρ)) and 0 < ρ < R.Let u be a smooth positive solution of the drifting heat equation
∂tu−Δfu = 0
in the cylinder Q = Bxo(r)× (s− r2, s) for some s ≥ 0 and r < R. Then for any
0 < δ < δ′ ≤ 1, there exist constants C5(n, a, ν), C6(n, ν) such that
supQδ
u ≤ C5eC6A(R)
(δ′ − δ)2+ν r2 Vf (xo, r)
∫Qδ′
u dμ dt
where Qα = Bxo(αr)× (s− α r2, s).
Moreover, we obtain a mean value inequality for subsolutions to the driftingheat equation as in [11, Theorem 5.2.9]
Lemma 2.5. Let (Mn, g, dμ) be a smooth metric measure space that satisfies thelocal Sobolev inequality (2) of Lemma 2.3 for all ϕ ∈ C∞0 (Bxo
(ρ)) and 0 < ρ ≤ R.Fix 0 < p <∞ and let v be a positive subsolution of the drifting heat equation suchthat
∂tv −Δfv ≤ 0

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 69
in the cylinder Q = Bxo(r)× (s− r2, s) for some s ≥ 0 and r < R. Then for any
0 < δ < δ′ ≤ 1 there exist constants C7(n, a, ν, p), C8(n, ν, p) such that
supQδ
up ≤ C7eC8A(R)
(δ′ − δ)2+ν r2 Vf (xo, r)
∫Qδ′
up dμ dt.
The following corollary is immediate by setting p = 1 and observing that anf -subharmonic function is also a subsolution to the drifting heat equation
Corollary 2.1. Let (Mn, g, dμ) be a smooth metric measure space as inLemma 2.5. Let v be a positive f -subharmonic function on M . Then thereexist constants C9(n, a), C10(n) such that
supBxo (
R2 )
u ≤ C9eC10A(R)
R2 Vf (xo, R)
∫Bxo (R)
u dμ.
The bottom of the Rayleigh quotient on the weighted manifold is defined as
λ1(M) = infg∈C∞
o (M)
∫M|∇g|2 dμ∫
M|g|2 dμ .
Whenever f has linear growth rate at a point, Munteanu and Wang prove an upperbound for λ1(M) in the case Ricf ≥ 0 [8] and a sharp upper upper bound whenRicf ≥ −(n− 1) [9].
For any compact domain, Ω ⊂ M , the drifting Laplacian Δf with Dirichletboundary conditions is a nonpositive, densely defined and self-adjoint operator onL2(Ω, e−fdv). Moreover, the first eigenvalue of the spectrum of Δf for the Dirichletproblem satisfies λ1(Ω) > 0.
We also make the following observation: Let {Ωi} be a sequence of compact setssuch that the boundary of each Ωi is piecewise smooth, Ωi ⊂ Ωi+1 and ∪iΩi = M .The Dirichlet drifting heat kernel of Δf on Ωi, Hi(x, y, t), is defined and has theproperties (
∂
∂t−Δf,y
)Hi(x, y, t) = 0 on Ωi × Ωi × (0, T )
limt→0
Hi(x, y, t) = δx(y) ef(x).
Moreover, Hi(x, y, t) > 0 since −Δf is self-adjoint and positive definite on {Ωi}.Letting Hf (x, y, t) be the drifting heat kernel on M , the maximum principle for thedrifting heat equation implies that Hi(x, y, t)↗ Hf (x, y, t) and that Hf is positive.Furthermore, λ1(Ωi)→ λ1(M).
We will prove the following result.
Lemma 2.6. Let
u(x, t) =
∫M
Hf (x, y, t) uo(y) dμ(y)
be a solution to the drifting heat equation defined on M × [0,∞).If g(x, t) satisfies
|∇g|2 + gt ≤ 0 on M × (0,∞),
then
F (t) = e2λ1(M) t
∫M
e2g(x,t) u2(x, t) dμ(x)

70 NELIA CHARALAMBOUS AND ZHIQIN LU
is nonincreasing for t ∈ (0,∞).
Proof. For {Ωi}, an exhaustion of M with compact subsets, and Hi(x, y, t)the Dirichlet heat kernel of Δf on Ωi, define
ui(x, t) =
∫Ωi
Hi(x, y, t) uo(y) dμ(y)
and let λ1(Ωi) > 0 be the first eigenvalue of the spectrum of Δf for the Dirichletproblem. ui(x, t) is now a nonnegative subsolution to the drifting heat equationwith Dirichlet boundary conditions on Ωi such that
(∂
∂t−Δf )ui ≤ 0 on Ωi × (0, T )
ui(x, t) = 0 on ∂Ωi × (0, T ).
We will first show that the function
Fi(t) = e2λ1(Ωi) t
∫Ωi
e2g(x,t)u2i (x, t) dμ(x)
is nonincreasing for t ∈ (0, T ). From the variational principle,
λ1(Ωi)
∫Ωi
e2gu2i dμ ≤
∫Ωi
|∇(egui)|2 dμ
=
∫Ωi
|∇eg|2 u2i dμ−
∫Ωi
e2g ui Δfui dμ
≤∫Ωi
|∇eg|2 u2i dμ−
∫Ωi
e2g ui (ui)t dμ
after integration by parts and using the fact that ui is a nonnegative subsolution.At the same time
∂
∂t
(∫Ωi
e2g u2i dμ
)= 2
∫Ωi
e2g gt u2i dμ+ 2
∫Ωi
e2g ui (ui)t dμ
≤ −2∫Ωi
e2g |∇g|2 u2i dμ+ 2
∫Ωi
e2g ui (ui)t dμ.
Combining the two, we get
∂
∂t
(e2λ1(Ωi) t
∫Ωi
e2g(x,t)u2i (x, t) dμ(x)
)≤ 0
which proves the claim for Fi.The lemma follows by letting i→∞, since λ1(Ωi)→ λ1(M) and ui → u. �
The next lemma extends the analogous result for the heat kernel of theLaplacian on a Riemannian manifold to the drifting heat kernel on a weightedmanifold.
Lemma 2.7. Let B1, B2 be two bounded subsets of M with volume V1 and V2,respectively, with respect to the measure dμ. Then∫
B1
∫B2
Hf (x, y, t) dμ(y) dμ(x) ≤ e−λ1(M)t V1/21 V
1/22 e−d2(B1,B2)/4t
for all t > 0, where d(B1, B2) denotes the distance between the two sets.

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 71
Proof. Define
ui(x, t) =
∫Bi
Hf (x, y, t) dμ(y) and gi(x, t) =d2(x,Bi)
4(t+ ε)
where d(x,Bi) is the distance between x and the set Bi, and ε > 0 is constant.Then
|∇gi|2 =|d∇d|24(t+ ε)2
≤ d2(x,Bi)
4(t+ ε)2and
∂gi∂t
= −d2(x,Bi)
4(t+ ε)2.
Therefore, we may apply Lemma 2.6 to each pair ui, gi to get that∫M
e2gi(x,t) u2i (x, t) dμ(x) ≤ e−2λ1(M) t
∫M
e2gi(x,0) u2i (x, 0) dμ(x)
From the definition of the drifting heat kernel, we know that
ui(x, 0) =
∫Bi
Hf (x, y, 0) dμ(y) = χ(Bi)
where χ(Bi) is the characteristic function of Bi.Given that gi(x, 0) = 0 for all x ∈ Bi, we obtain∫
M
e2gi(x,0) u2i (x, 0) dμ(x) = Vi
hence, ∫M
e2gi(x,t) u2i (x, t) dμ(x) ≤ e−2λ1(M) t Vi.
From the triangle inequality,
d2(B1, B2) ≤ [d(x,B1) + d(x,B2) ] ≤ 2d2(x,B1) + 2d2(x,B2)
for any x ∈M . Therefore,∫M
ed2(B1,B2)/8(t+ε) u1(x) u2(x) dμ(x)
≤∫M
ed2(x,B1)/4(t+ε) u1(x) e
d2(x,B2)/4(t+ε) u2(x) dμ(x)
≤(∫
M
e2g1(x,t) u21(x) dμ(x)
)1/2 (∫M
e2g2(x,t) u22(x) dμ(x)
)1/2
≤ V1/21 V
1/22 e−2λ1(M) t.
(3)
On the other hand, the left side of the inequality can be rewritten as∫M
ed2(B1,B2)/8(t+ε) u1(x) u2(x) dμ(x)
= ed2(B1,B2)/8(t+ε)
∫M
∫B1
∫B2
Hf (x, y, t)Hf (x, z, t) dμ(y) dμ(z) dμ(x)
= ed2(B1,B2)/8(t+ε)
∫B1
∫B2
Hf (z, y, 2t) dμ(y) dμ(z)
from the semigroup property of the heat operator.The lemma follows by combining this with (3) and sending ε→ 0. �
We are now ready to prove the Gaussian upper bounds for the drifting heatkernel.

72 NELIA CHARALAMBOUS AND ZHIQIN LU
Theorem 2.8. Let (Mn, g, dμ) be a metric measure space that satisfies theproperty (VR) for all x ∈ Bxo
(R). Let Hf (x, y, t) denote the minimal driftingheat kernel defined on M ×M × (0,∞) Then for any ε > 0, there exist constantsc1(n, ε), c2(n) such that
Hf (x, y, t) ≤c1 ec2 A(R)
V1/2f (x,
√t) V
1/2f (y,
√t)e−λ1t · e−
d2(x,y)4(1+ε) t
for any x, y ∈ Bxo(R/2) and 0 < t < R2/4, where λ1 = λ1(M).
The proof follows by combining Lemma 2.7 and the estimate of Lemma 2.4 (see[5] and [14, Theorem 1.1])
3. L1 Liouville Property
For the proof of the L1 Liouville theorem, we will need that the weightedmanifold is stochastically complete, in other words that∫
M
Hf (x, y, t) dμ = 1.
Grigor′yan shows in [3, Theorem 3.13] that a sufficient condition for stochasticcompleteness is that ∫ ∞
1
r
log Vf (xo, r)dr =∞
for some point xo ∈M . In other words, it requires that the weighted volume of themanifold grows at most exponentially quadratic in r. We summarize this below.
Lemma 3.1. Let (Mn, g, dμ) be a smooth metric measure space on which theheat kernel, Hf (x, y, t), is well-defined. Suppose that
Vf (xo, R) ≤ C Rα ecR2
with respect to a fixed point xo, for all R > 1 and uniform constants C, c, α. Then(Mn, g, dμ) is stochastically complete.
The above result essentially dictates what the assumptions on the volumegrowth and Ricf should be on our manifold. They indicate that in both the volumeand heat kernel estimates as well as in the mean value inequalities of the previoussection, the exponential term in R (in other words A(R)) should be at most qua-dratic in R. As we will see in the following section, the assumption in the theoremcan be achieved under a combination of conditions for Ricf and f .
The proof of Theorem 1.1 will be based on the arguments of [4] and as a resultrequire the following integration by parts formula
Proposition 3.1. Under the assumptions of Theorem 1.1, if v is a nonnegativef -subharmonic function in L1, then∫
M
Δf,yHf (x, y, t) v(y) dμ(y) =
∫M
Hf (x, y, t)Δf,y(y) dμ(y).

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 73
Proof. We include an outline of the proof for the sake of completion. Stokes’Theorem on Bxo
(R) implies that∣∣∣∣∫Bxo (R)
Δf,yHf (x, y, t) v(y) dμ(y)−∫Bxo (R)
Hf (x, y, t)Δf,yv(y) dμ(y)
∣∣∣∣≤
∫∂Bxo (R)
|∇Hf (x, y, t)| v(y) dσμ(y)−∫∂Bxo (R)
Hf (x, y, t) |∇v(y)| dσμ(y)
(4)
where dσμ is the induced metric on ∂Bxo(R) by the weighted measure dμ.
The goal is to show that the right side of the above inequality vanishes asR→∞. To this end, we take a cut-off function φ(s) : R+ → R+ such that
φ(s) = 1 for s ∈ [R,R+ 1]
φ(s) = 0 for s ∈ [0, R− 1] ∪ [R+ 2,∞)
0 ≤ φ(s) ≤ 1 and |φ′(s)| ≤√3.
The mean value inequality of Corollary 2.1 implies that there exist uniformconstants C9(n, a), C10(n) such that all R > 1
(5) supBxo (
R2 )
v ≤ C9eC10A(R)
R2 Vf (xo, R)‖v‖1.
Since v is nonnegative and f -subharmonic,
0 ≤∫M
φ2vΔfv dμ = −∫M
〈∇(φ2v),∇v〉 dμ
≤ 2
∫M
|∇φ|2v2 dμ− 1
2
∫M
φ2 |∇v|2 dμ
by the generalized Cauchy’s inequality. As a result,∫Bxo (R+1)\Bxo (R)
|∇v|2 dμ ≤ 4
∫M
|∇φ|2v2 dμ ≤ 12
∫Bxo (R+2)
v2 dμ
≤ supBxo (R+2)
v · ‖v‖1 ≤C eC
′ R2
Vf (xo, 2R+ 4)‖v‖21
by (5), where now C = C(n, a) and C ′ = C ′(n, b). Combining with the Schwartzinequality and the fact that Bxo
(R+ 1) \Bxo(R) ⊂ Bxo
(2R+ 4), we get
∫Bxo (R+1)\Bxo (R)
|∇v| dμ ≤ V1/2f (xo, 2R+ 4)
(∫Bxo (R+1)\Bxo (R)
|∇v|2 dμ)1/2
≤ C eC′ R2‖v‖1.
(6)
For all x, y ∈ Bxo(R + 1) and 0 < t < R2/4 the volume comparison property
of Lemma 2.2 implies that
Vf (x,√t) ≤ Vf (y,
√t+ d(x, y)) ≤
(d(x, y)√
t+ 1
)a+1
e4bR2
Vf (y,√t).

74 NELIA CHARALAMBOUS AND ZHIQIN LU
Therefore, for any x ∈ Bxo(R) and 0 < t < R2/4 the heat kernel estimate gives us∫
Bxo (R+1)\Bxo (R)
Hf (x, y, t) |∇v|(y) dμ(y)
≤(
supy∈Bxo (R+1)\Bxo (R)
Hf (x, y, t)) ∫
Bxo (R+1)\Bxo (R)
|∇v| dμ
≤ C V −1f (x,
√t) ‖v‖1 sup
y∈Bxo (R+1)\Bxo (R)
{(d(x, y)√
t+ 1
)a+1
eC R2− d2(x,y)5t
}
by (6), for C = C(n, a) and C = C(n, b).For x, y as above, d(x, y) ≤ R+1+d(xo, x) and d(x, y) ≥ R−d(xo, x). Therefore,∫
Bxo (R+1)\Bxo (R)
Hf (x, y, t) |∇v|(y) dμ(y)
≤ C V −1f (x,
√t) ‖v‖1
(R + 1 + d(xo, x)√
t+ 1
)a+1
eC R2− (R−d(xo,x))2
5t ) .
(7)
For T > 0 sufficiently small and for all t ∈ (0, T ), there exists a constant β > 0 anduniform constants c, c such that
C R2 − (R− d(xo, x))2
5t≤ −β R2 + c
d2(xo, x)
t+ c.
As a result, as R→∞ the right side of (7) tends to zero for all t ∈ (0, T ), x ∈M .In a similar manner, we can show that
(8)
∫Bxo (R+1)\Bxo (R)
|∇Hf (x, y, t)| v(y) dμ(y)
tends to zero as R → ∞. Using the definition of φ, integration by parts and thegeneralized Cauchy’s inequality we can first estimate∫
Bxo (R+1)\Bxo (R)
|∇Hf |2 dμ ≤∫M
φ2|∇Hf |2 dμ
≤ 4
∫M
|∇φ|2 H2fdμ− 2
∫M
φ2HfΔfHf dμ
≤ 12
∫Bxo (R+2)\Bxo (R−1)
(Hf )2 dμ
+ 2
(∫Bxo (R+2)\Bxo (R−1)
(Hf )2 dμ
)1/2(∫M
(ΔfHf )2 dμ
)1/2
.
(9)
The stochastic completeness of the weighted manifold and the Gaussian upperbound for Hf imply that for x ∈ Bxo
(R)∫Bxo (R+2)\Bxo (R−1)
Hf (x, y, t)2 dμ(y) ≤ sup
y∈Bxo (R+2)\Bxo (R−1)
Hf (x, y, t)
≤ C V −1f (x,
√t)
(R+ 2 + d(xo, x)√
t+ 1
)a+1
eC(R2 − (R− 1− d(xo, x))
2
5t
).

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 75
as in (7). Using the eigenfunction expansion for the heat kernel on compact do-
mains, we can show as in [2, Lemma 7] that for some uniform constant C∫M
(ΔfHf )2 dμ ≤ C
t2Hf (x, x, t).
We now substitute the above two upper bounds into the right side of (9) to get∫Bxo (R+1)\Bxo (R)
|∇Hf |2 dμ ≤ C
[V −1f (x,
√t) +
1
tV
−1/2f (x,
√t)H
1/2f (x, x, t)
]·(R + 2 + d(xo, x)√
t+ 1
)a+1
eC(R2− (R−1−d(xo,x))2
10t
).
From the above estimate and the mean value inequality of Corollary 2.1, we seethat∫
Bxo (R+1)\Bxo (R)
|∇Hf (x, y, t)| v(y) dμ(y)
≤ supy∈Bxo (R+1)\Bxo (R)
v(y) ·∫Bxo (R+1)\Bxo (R)
|∇Hf (x, y, t)| dμ(y)
≤ eC(1+R2)
Vf (xo, 2R+ 4)‖v‖21 · V
1/2f (xo, R+ 1)
(∫Bxo (R+1)\Bxo (R)
|∇Hf |2 dμ)1/2
≤ C V−1/2f (xo, 2R+ 4)
[V −1f (x,
√t) +
1
tV
−1/2f (x,
√t)H
1/2f (x, x, t)
]·(R+ 2 + d(xo, x)√
t+ 1
)a+1
eC(R2− (R−1−d(xo,x))2
10t
).
Similarly to the argument for (7), we can find a T > 0 sufficiently small such thatfor all t ∈ (0, T ) the right side of this inequality tends to zero as R→∞.
Now using the mean value theorem for integrals, we can show that the rightside of (4) tends to zero as R → ∞ for all t < T . That it tends to zero for allt > 0 is a consequence of the semigroup property of the heat kernel (see for example[14, Theorem 4.3]). �
We are now ready to prove Theorem 1.1.
Proof of Theorem 1.1. As in [4], we use the nonnegative f -subharmonicfunction v to construct a solution to the heat equation
v(t, x) =
∫M
Hf (x, y, t) v(y) dμ(y).
We observe that
∂
∂tv(t, x) =
∫M
(Δf,yHf (x, y, t)) v(y) dμ(y) =
∫M
Hf (x, y, t)Δf,yv(y) dμ(y) ≥ 0
by Proposition 3.1 and the subharmonicity of v. Therefore v(t, x) is nondecreasingin t. At the same time,∫
M
v(t, x)dμ(x) =
∫M
∫M
Hf (x, y, t) v(y) dμ(y) dμ(x) =
∫M
v(y) dμ(y)
by the stochastic completeness of the weighted manifold. Given that v(t, x) isnondecreasing in t, we conclude that v(t, x) = v(x) for all x, and as a result

76 NELIA CHARALAMBOUS AND ZHIQIN LU
(∂/∂t)v(t, x) = Δf,xv(t, x) = 0, in other words v(x) must be a nonnegativef -harmonic function.
To show that v is constant, we consider the function vα(x) := min{v(x), α} forsome positive constant α. vα is superharmonic, since v is harmonic, and it satisfiesthe properties
0 ≤ vα(x) ≤ v(x), |∇vα(x)| ≤ |∇v(x)|.As a result, vα is also in L1. Furthermore, it can easily be seen that vα satisfies themean value inequality (5): if vα = α then (5) clearly holds, and if not then
supBxo (
R2 )
vα ≤ supBxo (
R2 )
v ≤ C9eC10A(R)
R2 Vf (xo, R)‖v‖1 = C ′
9
eC10A(R)
R2 Vf (xo, R)‖vα‖1
for some constant C ′9 independent of R. Using the superharmonicity of vα, we can
also obtain the gradient estimate of (6). Applying a similar argument as in theproof of Proposition 3.1, we can integrate by parts to show that
∂
∂t
∫M
Hf (x, y, t) vα(y) dμ(y) =
∫M
Hf (x, y, t)Δf,yvα(y) dμ(y) ≤ 0
and obtain by the stochastic completeness of the manifold that vα must be f -harmonic.
From the regularity of harmonic functions, it follows that vα must satisfy eithervα ≡ v or vα ≡ α. Since α was arbitrary and v is nonnegative, we must have thatv is a constant function. �
4. Sufficient Conditions
In this section, we will give sufficient conditions on Ricf and f so that themanifold satisfies the assumptions of Theorem 1.1. As above, we fix a point xo ∈Mand set r(x) = d(x, xo).
Proposition 4.1. The weighted manifold satisfies the L1 Liouville propertywhenever one of the following holds:
(1) Ricf ≥ −K(1+r(x)2) and |f(x)| ≤ Ko for some uniform constants K,Ko.(2) Ricf ≥ 0 and |f(x)| ≤ c(1 + r(x)2) for some uniform constant c.(3) Ricf ≥ −K(1 + r(x)2) and |∇f | ≤ c(1 + r(x)) for some uniform constant
c.
Proof. For (1), the proof of Theorem 1.1 in [12] shows that the manifoldsatisfies property (VR) for all R > 1 with a = a(n,Ko) and A(R) = bR2 for someb = b(n,K).
For (2), Lemma 2.1 in [8] shows that the manifold satisfies the property (VR)for all R > 1 with a = n− 1 and A(R) = 9c (1 +R2).
For (3), we go back to the Laplacian comparison theorem in [12]. Let x, y ∈Bxo
(R) and γ be the minimizing geodesic from x to y such that γ(0) = x andγ(r) = y. Whenever Ricf ≥ −(n− 1)K(R) on Bxo
(3R), the Bochner formula givesus
Δfr(x, y) ≤ (n− 1)sn′K(r)
snK(r)− 1
sn2K(r)
∫ r
0
(sn2K)′(t) f ′(t) dt
where snK is the solution to the Riccati equation sn′′K−K snK = 0 with snK(0) = 0
and sn′K(0) = 1, and f ′(t) = 〈∇f,∇r〉. Observe that snK(r) = sinh(√K r) and
that (sn2K)′ ≥ 0.

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 77
If f ′(t) ≥ −c(R), then
Δfr(x, y) ≤ (n− 1)sn′K(r)
snK(r)+ c(R) ≤ n− 1
r+
√K(R) + c(R)
and integrating this inequality from r1 to r2 for 0 < r1 < r2 < R, we get
Jf (x, r2, ξ)
Jf (x, r1, ξ)≤
(r2r1
)n−1e(√
K(R)+c(R))(r2−r1) ≤(r2r1
)n−1e(√
K(R)+c(R))R.
The proposition follows in each case by Theorem 1.1. �
Observe that the last case reduces to assuming Ricqf ≥ −C(1 + r(x)2) which
was previously studied by X-D. Li [7].
5. Examples
The well-known examples in [6] demonstrate that for α > 2 there existRiemannian manifolds with Ric ≥ −c(1 + rα) that do not satisfy the L1
Liouville property. Below we provide examples at the other end of the spectrum, inthe sense that if Ricf ≥ 0 then we cannot let f have growth higher than quadratic.
Example 5.1. Consider the euclidian plane R2 with metric g = dr2 + r2dθ2
in polar coordinates, and with weighted measure dμ = e−fdv where f = f(r)is a function that only depends on the polar distance r. For simplicity, we takef(r) = Arα with α ≥ 1 and A ≥ 0.
Then Ricf = Ric + Hessf ≥ 0, and the f -Laplacian of a function u is given by
Δfu = urr +
(1
r− fr
)ur +
1
r2uθθ.
Observe that if f is constant, then log r is a harmonic function which does notbelong to L1, noting that the singularity at zero is not what affects the integrability.
The function
u(r) =
∫ r
1
1
tef(t) dt
is an f -harmonic function whose L1 norm is given by
‖u‖L1 = 2π
∫ ∞
0
∣∣∫ r
1
1
tef(t) dt
∣∣ r e−f(r)dr
= 2π
∫ 1
0
∫ 1
r
r
tef(t)−f(r) dt dr + 2π
∫ ∞
1
∫ r
1
r
tef(t)−f(r) dt dr.
The first integral above is always clearly bounded since the exponential factor is
bounded and∫ 1
0
∫ 1
rrt dt dr =
∫ 1
0r log r dr < C. Changing the order of integration
in the second integral gives
2π
∫ ∞
1
∫ ∞
t
r
tef(t)−f(r) dr dt
and when α = 2 this integral diverges.

78 NELIA CHARALAMBOUS AND ZHIQIN LU
However, when α > 2, we rewrite r = rα−1r2−α ≤ rα−1t2−α, since r ≥ t onour area of integration, then
2π
∫ ∞
1
∫ ∞
t
r
tef(t)−f(r) dr dt
≤ C lima,b→∞
∫ a
1
∫ b
t
rα−1t1−α eAtα−Arα dr dt
= C ′ lima,b→∞
∫ a
1
− t1−α eAtα−Arα∣∣r=b
r=tdt
= C ′ lima,b→∞
∫ a
1
t1−α [1− eAtα−Abα ] dt
≤ C ′ lima,b→∞
∫ a
1
t1−α dt <∞.
This simple example shows that it is not enough to assume Ricf ≥ 0 without anycontrol on f . In particular, if f has order higher than quadratic, then there couldexist an f -harmonic function with bounded L1 norm.
Example 5.2. Let S = R× S1 be the cylinder with flat metric g = dx2 + dθ2.Consider the smooth metric measure space (S, g, e−fdv) where f = f(x) is a smoothconcave function in x such that f(x) = |x|α for all |x| ≥ R, for some constants R > 0and α ≥ 2. Then Ricf ≥ 0.
Observe that the function
u(x) =
∫ x
0
ef(t) dt
is f -harmonic, since
Δfu = uxx −∇f · ∇u = 0.
We will show that u is in L1(dμ) when α > 2.u is an odd function about x = 0, therefore
‖u‖L1(dμ) = 4π
∫ ∞
0
u(x) e−f(x) dx = 4π
∫ ∞
0
∫ x
0
ef(t)−f(x) dt dx
The above integral converges when α > 2. To see this, we first change the order ofintegration, and then break it into two parts∫ ∞
0
∫ x
0
ef(t)−f(x) dt dx =
∫ ∞
0
∫ ∞
t
ef(t)−f(x) dx dt
=
∫ R
0
∫ ∞
t
ef(t)−f(x) dx dt+
∫ ∞
R
∫ ∞
t
ef(t)−f(x) dx dt.
The first integral is clearly bounded, since∫∞t
e−f(x) dx ≤∫∞0
e−f(x) dx < C for
α ≥ 2, and∫ R
0ef(t) dt < C.

THE L1 LIOUVILLE PROPERTY ON WEIGHTED MANIFOLDS 79
For the second integral, we observe that x ≥ t, therefore∫ ∞
R
∫ ∞
t
ef(t)−f(x) dx dt =
∫ ∞
R
∫ ∞
t
etα−xα
dx dt
≤∫ ∞
R
∫ ∞
t
xα−1
tα−1et
α−xα
dx dt
=
∫ ∞
R
−1(α− 1) tα−1
etα−xα
∣∣∣x→∞
x=tdt
=
∫ ∞
R
1
(α− 1) tα−1dt
since x ≥ t. The integral is again bounded for α > 2. Note that when α = 2 theintegral diverges.
References
[1] D. Bakry and M. Emery, Diffusions hypercontractives (French), Seminaire de probabilites,XIX, 1983/84, Lecture Notes in Math., vol. 1123, Springer, Berlin, 1985, pp. 177–206, DOI10.1007/BFb0075847. MR889476 (88j:60131)
[2] S. Y. Cheng, P. Li, and S. T. Yau, On the upper estimate of the heat kernel of a completeRiemannian manifold, Amer. J. Math. 103 (1981), no. 5, 1021–1063, DOI 10.2307/2374257.
MR630777 (83c:58083)[3] A. Grigor′yan, Heat kernels on weighted manifolds and applications, The ubiquitous heat
kernel, Contemp. Math., vol. 398, Amer. Math. Soc., Providence, RI, 2006, pp. 93–191.[4] P. Li, Uniqueness of L1 solutions for the Laplace equation and the heat equation on Rie-
mannian manifolds, J. Differential Geom. 20 (1984), no. 2, 447–457. MR788288 (86h:58133)[5] P. Li, Lectures on harmonic functions. Notes.[6] P. Li and R. Schoen, Lp and mean value properties of subharmonic functions on Riemannian
manifolds, Acta Math. 153 (1984), no. 3-4, 279–301, DOI 10.1007/BF02392380. MR766266(86j:58147)
[7] X.-D. Li, Liouville theorems for symmetric diffusion operators on complete Riemannian man-ifolds (English, with English and French summaries), J. Math. Pures Appl. (9) 84 (2005),no. 10, 1295–1361, DOI 10.1016/j.matpur.2005.04.002. MR2170766 (2006f:58046)
[8] O. Munteanu and J. Wang, Smooth metric measure spaces with non-negative curva-ture, Comm. Anal. Geom. 19 (2011), no. 3, 451–486, DOI 10.4310/CAG.2011.v19.n3.a1.MR2843238
[9] O. Munteanu and J. Wang, Analysis of weighted Laplacian and applications to Ricci solitons,Comm. Anal. Geom. 20 (2012), no. 1, 55–94, DOI 10.4310/CAG.2012.v20.n1.a3. MR2903101
[10] L. Saloff-Coste, A note on Poincare, Sobolev, and Harnack inequalities, Internat. Math. Res.Notices 2 (1992), 27–38, DOI 10.1155/S1073792892000047. MR1150597 (93d:58158)
[11] L. Saloff-Coste, Aspects of Sobolev-type inequalities, London Mathematical Society Lec-ture Note Series, vol. 289, Cambridge University Press, Cambridge, 2002. MR1872526(2003c:46048)
[12] G. Wei and W.Wylie, Comparison geometry for the Bakry-Emery Ricci tensor, J. Differential
Geom. 83 (2009), no. 2, 377–405. MR2577473 (2011a:53064)[13] J.-Y. Wu, Lp-Liouville theorems on complete smooth metric measure spaces, Bull. Sci. Math.
138 (2014), no. 4, 510–539, DOI 10.1016/j.bulsci.2013.07.002. MR3215940[14] J.-Y. Wu and P. Wu, Heat kernels on smooth metric measure spaces with nonnegative cur-
vature. arXiv:1401.6155.
Department of Mathematics and Statistics, University of Cyprus, Nicosia, 1678,
Cyprus
E-mail address: [email protected]
Department of Mathematics, University of California, Irvine, Irvine, California
92697
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13180
Some Remarks on Gevrey Well-Posednessfor Degenerate Schrodinger Equations
Massimo Cicognani and Michael Reissig
Abstract. We improve sufficient conditions for Gevrey well-posedness of theinitial value problem for the Schrodinger-type equation
1
i∂tu− a(t)Δxu+
n∑
j=1
bj(t, x)∂xju = 0
with a(t) vanishing of finite order at t = 0.
1. Introduction and main result
In [1], we consider the Cauchy problem in [0, T ]× Rnx
(1.1) Su = 0, u(0, x) = u0(x),
for the Schrodinger operator
(1.2) S :=1
i∂t − a(t)Δx +
n∑j=1
bj(t, x)∂xj
with a real continuous coefficient a(t) such that
(1.3) ct� ≤ a(t) ≤ Ct�
for � ∈ R+ and positive constants c, C.There we prove results of well-posedness in Sobolev spaces Hm and in Gevrey
spaces H∞,s, s > 1,
H∞,s :=⋂m
Hm,s, Hm,s :=⋃�>0
Hm,s� , Hm,s
� = e−�〈Dx〉1/sHm,
〈ξ〉 =√1 + |ξ|2. Gevrey well-posedness can be considered provided that bj ∈
C([0, T ]; γs), where
γs :=⋃A>0
γsA, γs
A :={f(x) :
∣∣∂βxf(x)
∣∣ ≤ CA|β|β!s |β| ≥ 0}.
2010 Mathematics Subject Classification. Primary 35J10, 35Q41.Key words and phrases. Schrodinger equations, Cauchy problem.
c©2015 M. Cicognani, M. Reissig
81

82 MASSIMO CICOGNANI AND MICHAEL REISSIG
Specifically, in [1] we prove:
Proposition 1.1. Let us assume ( 1.3) and
(1.4) | bj(t, x)| ≤ Ctk〈x〉−σ, 0 < k ≤ �, σ > 0.
Then the Cauchy problem ( 1.1) for the operator ( 1.2) is well-posed in
(1.5)
⎧⎪⎪⎪⎨⎪⎪⎪⎩L2 if k = �, σ > 1,
H∞ if k = �, σ = 1,
H∞,s with s < �+1�−k if k < �, σ ≥ 1,
H∞,s with s < (�−k)σ+k+1(�−k)σ+(k+1)(1−σ) if k ≤ �, σ < 1.
In particular, for k = �, we have well-posedness in
(1.6)
⎧⎪⎨⎪⎩L2 if σ > 1,
H∞ if σ = 1,
H∞,s with s < 11−σ if σ < 1,
which are the same spaces as in the widely investigated case of time independentcoefficients a(t) = τ , τ �=, 0 is a real constant, and bj(t, x) = bj(x); see [11] andalso [13], [7], [9], [3], [4], [10].
These results for time-independent Hamiltonians are sharp in view of the neces-sary conditions introduced in [6], [8], [5]. The same holds true for time-dependentcoefficients with k = �; see Section 5 in [2].
The main novelty in [1] is the degenerate case k < � with the well-posednessonly in Gevrey spaces, even with a strong decay rate σ ≥ 1 for the real parts bj(t, x) as |x| → ∞. The necessary conditions we prove in [2] show that H∞
well-posedness fails in this case, and s < (�+ 1)/(�− k) is the best possible boundfor the Gevrey index for k < � with any σ ≥ 1.
In this note, our aim is to improve the sufficient conditions for 0 < k < �and σ < 1 to obtain together with the results from [2] optimality for Gevrey well-posedness. The main result is the following:
Theorem 1.2. Let us assume ( 1.3) and ( 1.4) with 0 < k < � and σ < 1. Thenthe Cauchy problem ( 1.1) for the operator ( 1.2) is well-posed in H∞,s with
(1.7)
{s < �+1
�−k for 0 < 1− σ ≤ �−k�+1 ,
s < 11−σ for �−k
�+1 < 1− σ.
Remark 1.3. We improve the corresponding result in [1] for k < � and σ < 1since
(�− k)σ + k + 1
(�− k)σ + (k + 1)(1− σ)< min
{ �+ 1
�− k,
1
1− σ
}in this case.
Remark 1.4. Taking the critical values{s = �+1
�−k , 0 < 1− σ < �−k�+1 ,
s = 11−σ ,
�−k�+1 < 1− σ,
of the Gevrey index s, one has local in time well-posedness. For any u0 ∈ H∞,s
there exists T0 ≤ T , T0 = T0(u0), such that the problem (1.1) has a unique solutionu ∈ C([0, T0];H
∞,s).

GEVREY WELL-POSEDNESS FOR DEGENERATE SCHRODINGER EQUATIONS 83
Global in time well-posedness holds true for the critical values of s in theGevrey-Beurling spaces H∞,(s) =
⋂m,� H
m,s� .
For a still sufficiently fast decay, given by 1 − σ ≤ (� − k)/(� + 1), the well-posedness is influenced only by the degeneracy. With (�− k)/(�+ 1) < 1− σ, eventhe degeneracy is overshadowed by the too slow decay.
Now, considering also Proposition 1.1 for k = � or k < �, σ ≥ 1, in all caseswe get the best possible result of Gevrey well-posedness in view of the necessaryconditions we proved in [2]. Summarizing the results from [2] and this note, wehave the following statement:
Corollary 1.5. Let us assume ( 1.3) and ( 1.4) with 0 < k < � and σ < 1.Then the Cauchy problem ( 1.1) for the operator ( 1.2) is globally (in time) well-posed in H∞,s if and only if
(1.8)
{s < �+1
�−k for 0 < 1− σ ≤ �−k�+1 ,
s < 11−σ for �−k
�+1 < 1− σ.
2. Strategy of the proof
We briefly outline the strategy of the proof that will be given in more detail inthe following sections. As in [11] and [1], we prove the well-posedness of the Cauchyproblem (1.1) for the operator S in (1.2) after performing a change of variables
(2.1) v(t, x) = eΛ(t, x,Dx)u(t, x),
where eΛ(t, x,Dx), D = 1i ∂, is an invertible pseudo-differential operator with sym-
bol eΛ(t,x,ξ). With respect to the corresponding case k < �, σ < 1 in [1], weget a smaller order for Λ. This leads to larger values for the index s of Gevreywell-posedness.
Here the function Λ(t, x, ξ) is real-valued and belongs to C([0, T ];S1/s), s < 1/q,with
(2.2) q = max{�− k
�+ 1, 1− σ
},
where Sm denotes the class of symbols of order m. We look for Λ(t, x, ξ) in orderto establish the energy estimate
(2.3) ‖v(t, ·)‖L2 ≤ C‖v(0, ·)‖L2
for any solution of the transformed equation
(2.4) SΛv = 0, SΛ := eΛS(eΛ)−1.
The energy estimate (2.3) follows by Gronwall’s lemma if we find Λ such that
(2.5) iSΛ = ∂t − ia(t)Δx −A(t, x,Dx).
Here A(t, x,Dx) is a pseudo-differential operator of order 1 which is bounded fromabove in L2, that is,
(2.6) 2 (A(t, x,Dx)v, v
)≤ C‖v‖2L2 .
In view of the sharp Garding inequality, in order to get this property for A, we seekfor a function Λ in (2.1) that solves
(2.7) ∂tΛ(t, x, ξ) + 2a(t)n∑
j=1
ξj∂xjΛ(t, x, ξ) +
n∑j=1
bj(t, x)ξj ≤ 0 for all |ξ| ≥ h,

84 MASSIMO CICOGNANI AND MICHAEL REISSIG
and such that ∂tΛ(t, x, ξ) has the order 1 and a(t)∂xjΛ has the order zero.
As is well-known, the estimate (2.3) gives the well-posedness in L2 of the Cauchyproblem for the operator SΛ. Since
eΛ(t) : Hm,s → Hm, s < 1/q,
is continuous and invertible, then we have a unique solution u ∈ C([0, T ];H∞,s) of(1.1) for any given initial data u0 ∈ H∞,s, s < min{(�+ 1)/(�− k), 1/(1− σ)}.
3. Degeneracy
In this section, we construct the solution Λ to the inequality (2.7) and weestimate it only in the case
1− σ ≤ �− k
�+ 1,
that gives
q =�− k
�+ 1
in (2.2). A few changes appearing in the estimates of Λ in the case 1 − σ >(�− k)/(�+ 1) are collected in next section.
For the reader’s convenience and in order to have a more self-contained paper,we repeat some parts of the construction which are conducted in a similar way asin [1]. The improvement in the case under consideration comes from a sharperanalysis in the extended phase-space {(t, x, ξ) ∈ [0, T ] × R2n
x,ξ}. First, as in [1], wesplit it into two zones. Defining the separation line between both zones by
(3.1) tξ = 〈ξ〉−1
+1
h ,
where
〈ξ〉h =√
h2 + |ξ|2, h ≥ 1,
we introduce the
pseudo-differential zone: Zpd = {(t, x, ξ) ∈ [0, T ]× R2nx,ξ : t ≤ tξ},
evolution zone: Zev = {(t, x, ξ) ∈ [0, T ]× R2nx,ξ : t ≥ tξ}.
Localizing to the pseudo-differential zone, a solution of (2.7) in Zpd is simplygiven by
(3.2) Λpd(h, t, ξ) = −M〈ξ〉h∫ t
0
τkχ(τ/tξ)dτ,
where χ(y) is a cut-off function in γs(R), 0 ≤ χ(y) ≤ 1, χ(y) = 1 for |y| ≤ 1/2,χ(y) = 0 for |y| ≥ 1, yχ′(y) ≤ 0, and M ≥M0 is a large constant.
The symbol Λpd(h, t, ξ) is of order (�− k)/(�+ 1) by the above definition (3.1)of tξ. Taking a sufficiently large M , it follows that
(3.3) ∂tΛpd(h, t, ξ) + χ(t/tξ) n∑
j=1
bj(t, x)ξj ≤ 0
sincen∑
j=1
| bj(t, x)ξj| ≤M0tk〈x〉−σ|ξ| ≤M0t
k|ξ|.

GEVREY WELL-POSEDNESS FOR DEGENERATE SCHRODINGER EQUATIONS 85
Moreover, we have
|∂αξ Λpd(h, t, ξ)| ≤ C0MA|α|α!s〈ξ〉
−k+1 −|α|h ,(3.4)
|∂αξ ∂tΛpd(h, t, ξ)| ≤ C0MA|α|α!s〈ξ〉1−
k+1−|α|
h(3.5)
with constants C0 and A which are independent of h. This large parameter h willbe used for many estimates and, in particular, it is used also to get the invertibilityof the operator eΛ in the transformed equation (2.4).
Coming to the evolution zone, we split it into two sub-zones:
Z1ev = {(t, x, ξ) ∈ [0, T ]× R2n
x,ξ : t ≥ tξ, 〈x〉 ≤ t�+1〈ξ〉},Z2ev = {(t, x, ξ) ∈ [0, T ]× R2n
x,ξ : t ≥ tξ, 〈x〉 ≥ t�+1〈ξ〉}.
A solution of (2.7) in Z2ev is given by
(3.6) Λ2ev(h, t, ξ) = −KM〈ξ〉1−σ
h
∫ t
0
τk−(�+1)σ(1− χ(2τ/tξ)
)dτ.
Taking a sufficiently large M (the constant K > 1 will be fixed later independentlyof all other parameters), we have
(3.7) ∂tΛ2ev(h, t, ξ) +
(1− χ(t/tξ)
)(1− χ(〈x〉/t�+1〈ξ〉)
)
n∑j=1
bj(t, x)ξj ≤ 0
in view ofn∑
j=1
| bj(t, x)ξj| ≤M0tk〈x〉−σ〈ξ〉 ≤M0t
k−(�+1)σ〈ξ〉1−σ, 〈x〉 ≥ t�+1〈ξ〉/2.
From the definition (3.1) of tξ, the function Λ2ev satisfies
(3.8) |∂αξ Λ
2ev(h, t, ξ)| ≤
⎧⎨⎩C0MA|α|α!s〈ξ〉−k+1 −|α|h , 1− σ < �−k
�+1 ,
C0MA|α|α!s〈ξ〉−k+1 −|α|h log〈ξ〉h, 1− σ = �−k
�+1 ,
(3.9) |∂αξ ∂tΛ
2ev(h, t, ξ)| ≤ C0MA|α|α!s〈ξ〉1−
k+1−|α|
h
since here we have k + 1 − (� + 1)σ ≤ 0, 1/t ≤ 4〈ξ〉1/(�+1)h . The constants C0 and
A are independent of h.The support of the function Λ2
ev contains the whole evolution zone Zev and notonly Z2
ev because it will be also used to control the derivative ∂tΛ1ev of the term
Λ1ev, localized to Z1
ev, of the solution Λev = Λ1ev +Λ2
ev of (2.7) in Zev. At this point,we will fix the constant K in (3.6).
In order to construct such a function Λ1ev, we consider the solution λ(t, x, ξ) of
the equation
(3.10)
n∑j=1
ξj∂xjλ(t, x, ξ) + |ξ|g(t, x, ξ) = 0
that is given for ξ �= 0 by
λ(t, x, ξ) = −∫ x·ω
0
g(t, x− τω, ξ)dτ with ω = ξ/|ξ|.

86 MASSIMO CICOGNANI AND MICHAEL REISSIG
We take
(3.11) λ0,1(t, x, ξ) =
−∫ x·ω
0
g1(t, x− τω, ξ)dτ with g1(t, x, ξ) = M〈x〉−σχ(〈x〉/t�+1〈ξ〉
)and
(3.12) λ0,2(t, x, ξ) =
−∫ x·ω
0
g2(t, x− τω, ξ)dτ with g2(t, x, ξ) = M〈x · ω〉−σχ(〈x〉/t�+1〈ξ〉
).
Then we define
(3.13) λ0(h, t, x, ξ) =(χ(2x · ω/〈x〉
)λ0,1(t, x, ξ) +
(1− χ
(2x · ω/〈x〉
))λ0,2(t, x, ξ)
)(1− χ(|ξ|/h)
)since we need to solve (2.7) only for large |ξ| ≥ h.
The function λ0 solves
(3.14)n∑
j=1
ξj∂xjλ0(h, t, x, ξ) +M |ξ|〈x〉−σχ
(〈x〉/t�+1〈ξ〉
)≤ 0, |ξ| ≥ h,
and for multi-indices α, β, β �= 0, it satisfies the estimates
(3.15) |∂αξ λ0(h, t, x, ξ)| ≤ C0MA|α|α!st(�+1)(1−σ)〈ξ〉1−σ−|α|
h ,
(3.16) |∂βx∂
αξ λ0(h, t, x, ξ)| ≤ C0MA|α+β|(α+ β)!s〈ξ〉−|α|
h ,
where the constant C0 and A are independent of large h.Taking into consideration the function Λ2
ev that was already introduced in (3.6)and the above defined λ0, we complete the solution Λev of (2.7) in the evolutionzone after taking
(3.17)
{Λev(h, t, x, ξ) = Λ1
ev(h, t, x, ξ) + Λ2ev(h, t, ξ),
Λ1ev(h, t, x, ξ) =
(1− χ(t/tξ)
)tk−�λ0(h, t, x, ξ).
From (3.14), (1.3) and (1.4), we have(3.18)
2a(t)
n∑j=1
ξj∂xjΛ1ev(h, t, x, ξ) +
(1− χ(t/tξ)
)χ(〈x〉/t�+1〈ξ〉
)
n∑j=1
bj(t, x)ξj ≤ 0
for |ξ| ≥ h after taking a sufficiently large M ≥M0. Then, from∣∣∂tΛ1ev(h, t, x, ξ)
∣∣ ≤ K0Mtk−σ(�+1)〈ξ〉1−σh
and 1 − χ(t/2tξ) = 1 on the support of ∂tΛ1ev, we still have a solution to the
inequality (3.7) by taking the sum Λev = Λ1ev +Λ2
ev in place of the single term Λ2ev
after having fixed K ≥ K0 + 1 in the definition (3.6). This, together with (3.18),gives(3.19)
∂tΛev(h, t, x, ξ) + 2a(t)n∑
j=1
ξj∂xjΛev(h, t, x, ξ) +
(1− χ(t/tξ)
)
n∑j=1
bj(t, x)ξj ≤ 0

GEVREY WELL-POSEDNESS FOR DEGENERATE SCHRODINGER EQUATIONS 87
for |ξ| ≥ h since Λ2ev does not depend on x.
Using (3.3) and (3.19), we have solutions Λ to (2.7) which are defined by
(3.20) Λ(h, t, x, ξ) = �(t)〈ξ〉1s
h + Λpd(h, t, ξ) + Λev(h, t, x, ξ)
with �′(t) < 0 and 1/s > q with q from (2.2), here 1/s > (�−k)/(�+1). The weight
function �(t)〈ξ〉1/sh will be used to absorb the terms of order q in the asymptoticexpansion of the transformed operator SΛ in (2.4).
We summarize all the properties of Λ(h, t, x, ξ) that we need in the followingproposition:
Proposition 3.1. Let us assume ( 1.3) and ( 1.4) with 1−σ ≤ (�− k)/(�+1),and let us consider the symbol Λ(h, t, x, ξ) which is defined by ( 3.20) with 1/s >(�−k)/(�+1). Let N > 0, �0 > 0, δ ∈
[0, 1/s− (�−k)/(�+1)
)be given constants.
Then we can choose the parameters M ≥M0, h ≥ h0, M0 is independent of allother parameters, h0 = h0(δ, �0, N), and the function �(t) such that
∂tΛ + 2a(t)
n∑j=1
ξj∂xjΛ +
n∑j=1
bj(t, x)ξj(3.21)
≤ Ch −N(�(t)〈ξ〉1/sh + 〈ξ〉(�−k)/(�+1)+δ
h
)with
(3.22) 0 < �(t) ≤ �0, 0 ≤ t ≤ T.
Furthermore, Λ satisfies for all multi-indices α the estimates
(3.23) |∂αξ Λ(h, t, x, ξ)|
≤
⎧⎨⎩C0A|α|α!s
(�(t)〈ξ〉
1s
h + 〈ξ〉−k+1
h
)〈ξ〉−|α|
h , 1− σ < �−k�+1 ,
C0A|α|α!s
(�(t)〈ξ〉
1s
h + 〈ξ〉−k+1
h log〈ξ〉h)〈ξ〉−|α|
h , 1− σ = �−k�+1 ,
(3.24) |∂αξ ∂tΛ(h, t, x, ξ)| ≤ C0A
|α|α!s(�′(t)〈ξ〉
1s
h + 〈ξ〉−k+1+1
h
)〈ξ〉−|α|
h ,
and for all multi-indices α, β with |β| > 0, j = 0, 1, the estimates
|∂βx∂
αξ ∂
jtΛ(h, t, x, ξ)| ≤ C0MA|α+β|(α+ β)!s〈ξ〉
−k+j+1 −|α|
h ,(3.25)
|a(t)∂βx∂
αξ Λ(h, t, x, ξ)| ≤ C0MA|α+β|(α+ β)!s〈ξ〉−|α|
h .(3.26)
The constants C0 and A are independent of the parameters h ≥ h0 and M ≥ M0.
In particular, Λ has the order 1/s, Λ − �(t)〈ξ〉1/sh the order (� − k)/(� + 1) (withan extra factor log〈ξ〉h for 1 − σ = (� − k)/(� + 1)), ∂tΛ has the order at most 1,a(t)∂xj
Λ, j = 1, . . . , n, the order 0.
Proof. The function Λpd(h, t, ξ) + Λev(h, t, x, ξ) is a solution to (2.7) for|ξ| ≥ h. Therefore, we have (3.21) after taking in (3.20) the solution of
(3.27) �′(t) +N�(t) +Nh−k+1 +δ− 1
s = 0, �(0) = �0,
for the weight function �(t)〈ξ〉h. Since (�− k)/(�+ 1) + δ − 1/s < 0, we can makeNh(�−k)/(�+1)+δ−1/s so small for h ≥ h0 such that (3.22) is satisfied.

88 MASSIMO CICOGNANI AND MICHAEL REISSIG
The estimates (3.23) and (3.24) for the term Λpd + Λev in (3.20) follow from
(3.4), (3.5), (3.8) and (3.9). For ∂jtΛ
1ev, j ∈ {0, 1}, we use (3.15) and
tk−�+(�+1)(1−σ)−j〈ξ〉1−σh ≤ C0〈ξ〉
−k+j+1
h on the support of 1− χ(t/tξ),
by the definition (3.1) of tξ and the present assumption 1− σ ≤ (�− k)/(�+ 1). In
the same way, the estimates (3.25) for ∂βx∂
αξ ∂
jtΛ = ∂β
x∂αξ ∂
jtΛ
1ev follow from (3.16)
and the definition of tξ (Λ1ev is the only term depending on x in (3.20)).
Finally, from (1.3) and the definitions (3.17), (3.20), we have
|a(t)∂βx∂
αξ Λ(h, t, x, ξ)| ≤ Ctk|∂β
x∂αξ λ0(h, t, x, ξ)|;
hence (3.26) is a direct consequence of (3.16). �
4. Slow decay
In this section, we estimate the solution Λ to (2.7) which is given by (3.20) inthe case
1− σ >�− k
�+ 1,
that is,
q = 1− σ
in (2.2). Some estimates are modified because now we are not always dealingwith singular powers of t. We only need the splitting into pseudo-differential andevolution zones to control ∂β
xΛ.For Λpd from (3.2), the inequalities (3.4) and (3.5) remain unchanged. We just
observe that the order (�− k)/(�+ 1) of Λpd is now smaller than 1− σ.The estimates (3.8) for Λ2
ev from (3.6) become
(4.1) |∂αξ Λ
2ev(h, t, ξ)| ≤ C0MA|α|α!s〈ξ〉1−σ−|α|
h
since here we have k+1−σ(�+1) > 0 and we can bound tk+1−σ(�+1) by a constantfor t ∈ [tξ, T ]. No additional effect comes from the localization in the evolutionzone. In the same way, still without localizing, the inequality
|∂αξ ∂tΛ
2ev(h, t, ξ)| ≤ C0MA|α|α!stk−σ(�+1)〈ξ〉1−σ−|α|
h
with the L1 factor tk−σ(�+1) would be sufficient in dealing with energy estimates.Using the definition of tξ in the case k − σ(� + 1) < 0, we can have boundedsemi-norms of the symbol ∂tΛ
2ev in all cases and (3.9) becomes
(4.2) |∂αξ ∂tΛ
2ev(h, t, ξ)| ≤
{C0MA|α|α!s〈ξ〉1−
k+1−|α|
h , −1 < k − σ(�+ 1) < 0,
C0MA|α|α!s〈ξ〉1−σ−|α|h , k − σ(�+ 1) ≥ 0.
Also for ∂αξ Λ
1ev, Λ
1ev is defined in (3.17); there is no effect from t > tξ/2 on its
support. The inequality (3.15) and k+1− σ(�+1) > 0 lead to the same estimates(4.1) for ∂α
ξ Λ1ev as for ∂α
ξ Λ2ev. Here the order of Λ1
ev is 1− σ.
In a similar way, (4.2) holds true for ∂αξ ∂tΛ
1ev.
We need the localization in the evolution zone for ∂βx∂
jtΛ = ∂β
x∂jtΛ
1ev, |β| > 0,
j ∈ {0, 1}, since in (3.16) we have not any power of t to compensate the singularfactor tk−� in the definition of Λ1
ev. The estimate (3.25) remains unchanged; wejust observe that for j = 0 the order (� − k)/(� + 1) of ∂β
xΛ1ev is now smaller than
1− σ.

GEVREY WELL-POSEDNESS FOR DEGENERATE SCHRODINGER EQUATIONS 89
Finally, we have the same inequality (3.26) for a(t)∂βxΛ.
Summing up, for 1 − σ > (� − k)/(� + 1), we have the following properties ofΛ, similar to those ones collected in Proposition 3.1 for 1− σ ≤ (�− k)/(�+ 1).
Proposition 4.1. Let us assume ( 1.3) and ( 1.4) with 1−σ > (�− k)/(�+1),and let us consider the symbol Λ(h, t, x, ξ) which is defined by ( 3.20) with 1/s >1− σ. Let N > 0, �0 > 0, δ ∈ [0, 1/s− 1+ σ) be any given constants. Then we canchoose the parameters M ≥M0, h ≥ h0, M0 is independent of all other parameters,h0 = h0(δ, �0, N), and the function �(t) such that
(4.3) ∂tΛ + 2a(t)n∑
j=1
ξj∂xjΛ +
n∑j=1
bj(t, x)ξj ≤ Ch −N(�(t)〈ξ〉
1s
h + 〈ξ〉1−σ+δh
)with �(t) satisfying ( 3.22).
Furthermore, Λ satisfies for all multi-indices α the estimates
|∂αξ Λ(h, t, x, ξ)| ≤ C0A
|α|α!s(�(t)〈ξ〉
1s
h + 〈ξ〉1−σh
)〈ξ〉−|α|
h ,(4.4)
|∂αξ ∂tΛ(h, t, x, ξ)| ≤ C0A
|α|α!s(�′(t)〈ξ〉
1s
h + 〈ξ〉1−σ′
h
)〈ξ〉−|α|
h ,(4.5)
where σ′ ≥ 0 is given by
σ′ = min{σ,
k
�+ 1
},
and for all multi-indices α, β with |β| > 0, j = 0, 1, the estimates ( 3.25), ( 3.26).The constants C0 and A are independent of the parameters h ≥ h0 and M ≥
M0. In particular, Λ has the order 1/s, Λ − �(t)〈ξ〉1/sh the order 1 − σ, ∂tΛ theorder at most 1, a(t)∂xj
Λ, j = 1, . . . , n, the order 0.
5. Verification
We can now conclude the proof of Theorem 1.2 using the calculus for pseudo-differential operators of infinite order in [12]. We refer to [1] for full details of thecomputation.
For h ≥ h0, the operator eΛ with symbol eΛ(h,t,x,ξ), Λ(h, t, x, ξ) is defined by(3.20), is continuous and invertible from the space Hm,s
� to Hm for � < �0, and wehave the asymptotic expansion:
(5.1) eΛ(h, t, x,Dx)(iS)(eΛ(h, t, x,Dx)
)−1= ∂t − ia(t)Δx −A(h, t, x,Dx)
with
(5.2) A(h, t, x, ξ) =
∂tΛ(h, t, x, ξ) + 2a(t)
n∑j=1
ξj∂xjΛ(h, t, x, ξ) +
n∑j=1
bj(t, x)ξj +R(h, t, x, ξ),
where R(h, t, x, ξ) denotes a symbol that satisfies
(5.3) |∂αξ ∂
βxR(h, t, x, ξ)| ≤ Cαβ
(�(t)〈ξ〉
1s
h + 〈ξ〉q+δh
)〈ξ〉−|α|
h
with constants Cαβ which are independent of h ≥ h0 and a suitable δ ∈ [0, 1/s−q).Here q is defined by (2.2), δ = δ(s, �, k, σ).

90 MASSIMO CICOGNANI AND MICHAEL REISSIG
Now we can fix the large parameter N and then h = h0 in (3.21) and (4.3) toconclude the inequality
(5.4) 2 A(h0, t, x, ξ) ≤ C
which gives immediately by the sharp Garding inequality the desired estimate tothe above in L2
2 (A(h0, t, x,Dx)v, v
)≤ C‖v‖2L2 , v ∈ L2,
since A(h0, t, x, ξ) is a symbol of order 1.The well-posedness in L2 of the Cauchy problem
(5.5) eΛ−k iS(eΛ−k
)−1v = 0, v(0, x) = v0(x)
follows after application of the energy method. This gives the well-posedness of theCauchy problem (1.1) in H∞,s for s < 1/q, q being defined by (2.2). This completesthe proof of Theorem 1.2. �
References
[1] Massimo Cicognani and Michael Reissig, Well-posedness for degenerate Schrodinger equa-tions, Evol. Equ. Control Theory 3 (2014), no. 1, 15–33, DOI 10.3934/eect.2014.3.15.MR3177257
[2] Massimo Cicognani and Michael Reissig, Necessity of Gevrey-type Levi conditions for degen-erate Schrodinger equations, J. Abstr. Differ. Equ. Appl. 5 (2014), no. 1, 52–70. MR3294531
[3] Shin-ichi Doi, On the Cauchy problem for Schrodinger type equations and the regularity ofsolutions, J. Math. Kyoto Univ. 34 (1994), no. 2, 319–328. MR1284428 (95g:35190)
[4] Shin-ichi Doi, Remarks on the Cauchy problem for Schrodinger-type equations, Comm. Par-tial Differential Equations 21 (1996), no. 1-2, 163–178, DOI 10.1080/03605309608821178.MR1373768 (96m:35058)
[5] Michael Dreher, Necessary conditions for the well-posedness of Schrodinger type equa-tions in Gevrey spaces, Bull. Sci. Math. 127 (2003), no. 6, 485–503, DOI 10.1016/S0007-4497(03)00026-5. MR2000672 (2004g:35182)
[6] Wataru Ichinose, Some remarks on the Cauchy problem for Schrodinger type equations, OsakaJ. Math. 21 (1984), no. 3, 565–581. MR759481 (86f:35060)
[7] Wataru Ichinose, Sufficient condition on H∞ well-posedness for Schrodinger typeequations, Comm. Partial Differential Equations 9 (1984), no. 1, 33–48, DOI
10.1080/03605308408820324. MR735147 (85g:35037)[8] Wataru Ichinose, On a necessary condition for L2 well-posedness of the Cauchy problem for
some Schrodinger type equations with a potential term, J. Math. Kyoto Univ. 33 (1993),no. 3, 647–663. MR1239083 (94i:35209)
[9] Wataru Ichinose, On the Cauchy problem for Schrodinger type equations and Fourier integraloperators, J. Math. Kyoto Univ. 33 (1993), no. 3, 583–620. MR1239080 (94i:35208)
[10] Kunihiko Kajitani, The Cauchy problem for Schrodinger type equations with variable co-efficients, J. Math. Soc. Japan 50 (1998), no. 1, 179–202, DOI 10.2969/jmsj/05010179.MR1484618 (99a:35043)
[11] Kunihiko Kajitani and Akio Baba, The Cauchy problem for Schrodinger type equations, Bull.Sci. Math. 119 (1995), no. 5, 459–473. MR1354247 (96m:35060)
[12] Kunihiko Kajitani and Tatsuo Nishitani, The hyperbolic Cauchy problem, Lecture Notes inMathematics, vol. 1505, Springer-Verlag, Berlin, 1991. MR1166190 (94f:35074)
[13] Sigeru Mizohata, On some Schrodinger type equations, Proc. Japan Acad. Ser. A Math. Sci.57 (1981), no. 2, 81–84. MR605288 (82g:35032)

GEVREY WELL-POSEDNESS FOR DEGENERATE SCHRODINGER EQUATIONS 91
Dipartimento di Matematica, Universita di Bologna, Piazza di Porta San Donato,
5, 40126 Bologna, Italy
E-mail address: [email protected]
TU Bergakademie Freiberg, Fakultat fur Mathematik und Informatik, Institut fur
Angewandte Analysis, 09596 Freiberg, Germany
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13181
Asymptotics for Damped EvolutionOperators with Mass-like Terms
Marcello D’Abbicco
Abstract. In this paper, we study the asymptotic profile of the solution for aσ-evolution operator with an exterior or structural damping, to which we adda lower order term m2(−Δ)μu = 0, with μ < σ, namely:
utt + (−Δ)σu+ 2a(−Δ)αut +m2(−Δ)μu = 0.
This additional term plays a role analogous to a mass term since it improves thedecay rate of the solution. A classical example is provided by the dissipativebeam equation (σ = 2, α = 0, μ = 1). Exception given for the case of theKlein-Gordon equation with exterior damping, which decay improves from apolynomial to an exponential rate, due to the presence of the mass term, thedecay rate remains polynomial, in general. This leads to some applicationsto semilinear models with power nonlinearities. When a diffusive structure ofthe solution to our linear problem appears at low frequencies, according to therelations between fractional powers of the Laplacian, we prove the anomalousdiffusion phenomenon.
1. Introduction
We study the asymptotic profile and the decay estimates for
(1.1)
⎧⎪⎨⎪⎩utt + (−�)σu+ 2a(−�)αut +m2(−�)μu = 0 , t ≥ 0, x ∈ Rn,
u(0, x) = u0(x) , x ∈ Rn,
ut(0, x) = u1(x) , x ∈ Rn,
where a > 0, m > 0, σ > 0, α ∈ [0, σ] and μ ∈ [0, σ). For the sake of brevity, in thefollowing, we will omit the notation t ≥ 0 and x ∈ Rn in our Cauchy problems.
The model in (1.1) can be considered as a σ-evolution operator with a dampingterm 2a(−�)αut and a mass-like lower-order term m2(−�)μu. We say that theterm m2(−�)μu may be considered a mass-like term in the sense that its influenceappears at low frequencies and it improves the decay rate of the solution with
2010 Mathematics Subject Classification. Primary 35L15; Secondary 35L71.
Key words and phrases. Evolution operators, damping, anomalous diffusion, decay estimates,beam equation.
The author is supported by Fundacao de Amparo a Pesquisa do Estado de Sao Paulo(FAPESP), grants 2013/15140-2 and 2014/02713-7, JP - Programa Jovens Pesquisadores em Cen-tros Emergentes, research project Decay estimates for semilinear hyperbolic equations. He is amember of the Gruppo Nazionale per l’Analisi Matematica, la Probabilita e le loro Applicazioni(GNAMPA) of the Istituto Nazionale di Alta Matematica (INdAM).
c©2015 M. D’Abbicco
93

94 MARCELLO D’ABBICCO
respect to the corresponding problem with m = 0. Therefore, its effect is somewhatsimilar to the one produced by adding a mass term m2u to a damped wave equation,namely, setting σ = 1, α = 0, μ = 0 in (1.1):
(1.2)
⎧⎪⎨⎪⎩utt −�u+ 2aut +m2u = 0 ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) .
It is well-known that this improves the decay rate for the damped wave equationfrom a polynomial to an exponential decay rate. Another model of interest is thedissipative beam equation, obtained by setting σ = 2, α = 0, μ = 1 in (1.1), i.e.,
(1.3)
⎧⎪⎨⎪⎩utt +Δ2u+ ut −�u = 0 ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) .
If we formally set μ = σ, or m = 0, in (1.1), then we obtain a σ-evolution operatorwith exterior (α = 0) or structural (α ∈ (0, σ]) damping. These models, alsocalled generalized damped wave equations, have been extensively investigated (see,for instance, [12]). In particular, G. Karch [7] showed the anomalous diffusionphenomenon, i.e., that the solution to
(1.4)
⎧⎪⎨⎪⎩utt + (−�)σu+ (−�)αut = 0 ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) ,
has the same asymptotic profile of the solution to
(1.5)
{vt + (−�)σ−αv = 0 ,
v(0, x) = v0(x) ,
for a suitable choice of initial data v0 = v0(u0, u1, α), if 2α < σ. This phenomenonhas been further investigated in [1], in the general Lp − Lq setting. For the waveequation with exterior damping (σ = 1, α = 0), i.e.,
(1.6)
⎧⎪⎨⎪⎩utt −Δu+ ut = 0 ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) ,
the diffusion phenomenon in Lp−Lq setting has been studied in [8,9,11] (the heatequation appears in (1.5) for σ = 1, α = 0). If σ ∈ [α, 2α), then the asymptoticprofile changes, as shown in [4] for the case σ = α = 1. These results aboutthe asymptotic profile and the decay estimates related allowed, in particular, toprove the global existence of small data solutions to the semilinear problem withpower nonlinearity |u|q, in the supercritical case (see, for instance, [5,6,13] for thecase α = 0 and [2,3] for α > 0).
In this paper, we derive decay estimates for the solution to (1.1), in particular,proving the anomalous diffusion phenomenon for 2α ∈ (0, μ). Then we apply theobtained estimates to the study of global existence of small data solutions to theproblem with power nonlinearity.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 95
We will separately study the solution to (1.1) at low and high frequencies,discussing the different possible cases, according to the relations between the pow-ers σ, α and μ. We consider the roots of the full symbol of the equation in (1.1)
λ2 + 2aλ|ξ|2α + |ξ|2σ +m2|ξ|2μ = 0,
and we define the discriminant
D(|ξ|):=a2|ξ|4α − |ξ|2σ −m2|ξ|2μ.The roots are real-valued,
(1.7) λ±(|ξ|) = −a|ξ|2α ±√
D(|ξ|)if D(|ξ|) ≥ 0, whereas they are complex-valued with nonzero imaginary part,
(1.8) λ±(|ξ|) = −a|ξ|2α, !λ±(|ξ|) = ±√−D(|ξ|)
if D(|ξ|) < 0. In general, the structure of the roots given by (1.7) hints similaritieswith the kernels of the solutions to fractional diffusion equations,
(1.9) vt + c2(−�)κv = 0,
for some κ, c > 0, whereas if the roots are given by (1.8) then oscillations come intoplay and some similarities appear with the κ-evolution operator
(1.10) wtt + ω2(−�)κw = 0,
for some κ, ω > 0.We may separately consider the following cases:
(A) there exists k > 0 such that it holds D(|ξ|) ≥ 0 for any |ξ| ≤ k and D(|ξ|) < 0for any |ξ| > k;
(B) it holds D(|ξ|) < 0 for any ξ �= 0, with the possible exception of an interval |ξ| ∈[k1, k2], where 0 < k1 ≤ k2, in which D(|ξ|) ≥ 0;
(C) there exists k > 0 such that it holds D(|ξ|) < 0 for any |ξ| ∈ (0, k) and D(|ξ|) ≥0 for any |ξ| ≥ k.
In the following, by (A), (B) and (C) we denote the three cases above.The case considered depends on the fractional powers of the Laplacian, μ, α
and σ and on the constants a and m, in special cases.
• If 2α < μ < σ, then we are in case (A). Also, if 2α = μ < σ and a > m,
then we are in case (A), in particular, k = (a2 −m2)1
2σ−2μ .• If μ < 2α < σ, then we are in case (B). Also, if 2α = μ < σ and a ≤ m,
then we are in case (B), in particular, D(|ξ|) < 0 for any ξ �= 0. Also,if μ < 2α = σ and a ≤ 1, then we are in case (B), in particular, D(|ξ|) < 0for any ξ �= 0.
• If μ < σ < 2α, then we are in case (C). Also, if μ < 2α = σ and a > 1,
then we are in case (C), in particular, k = (m2/(a2 − 1))1
2σ−2μ .
Moreover, we notice that in the special case 2α = μ < σ and a = m, it holdsD(|ξ|) =|ξ|2σ, i.e., λ± = −a|ξ|2α ± |ξ|σ, whereas in the special case μ < 2α = σ and a = 1,
it holds D(|ξ|) = m2|ξ|2μ, i.e., λ± = −a|ξ|2α ±m|ξ|μ. Additional details are givenin Remark 4.2.
For the sake of completeness, we briefly recall in Section 2 the well-knownproperties of the solution to (1.1) when (α, μ) = (0, 0). In particular, the solu-tion exponentially decays in time, as for (1.2). This exponential decay does not

96 MARCELLO D’ABBICCO
appear if (α, μ) �= (0, 0) in (1.1). Then, we study the three cases (A), (B) and (C),considering first the low-frequencies solution (Sections 3 and 4) and then the high-frequencies one (Section 5). In Section 6 we apply the obtained decay estimates,in the three cases, to study the global existence of small data solutions to thesemilinear problem
(1.11)
⎧⎪⎨⎪⎩utt + (−�)σu+ 2a(−�)αut +m2(−�)μu = f(u) ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) .
Here f(u) = |u|q or, more in general, it is a nonlinearity f(u) satisfying
(1.12) f(u) = 0, |f(u)− f(v)| ≤ C |u− v|(|u|q−1 + |v|q−1
),
for some q > 1.
In the following, we denote by u(t, ξ) = F(u(t, ·))(ξ) the Fourier transformof u(t, x) with respect to x. Then, for any ξ such that D(|ξ|) > 0 we get
(1.13) u = u+ + u−, where u+ =−λ−u0 + u1
2√
D(|ξ|)eλ+t, u− =
λ+u0 − u1
2√
D(|ξ|)eλ−t ,
whereas for any ξ such that D(|ξ|) < 0 it holds
(1.14) u = e−a|ξ|2αt
(u0 cos(
√−D(|ξ|) t) + a|ξ|2αu0 + u1√
−D(|ξ|)sin(
√−D(|ξ|) t)
).
2. Generalized damped Klein-Gordon equation
If (α, μ) = (0, 0) in (1.1), i.e., we consider the problem
(2.1)
⎧⎪⎨⎪⎩utt + (−�)σu+ 2aut +m2u = 0 ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) ,
then we have the following well-known result.
Proposition 2.1. Let a > 0, m > 0 and σ > 0 in (2.1). Then, for anyreal k ≥ 0 and for any integer j ≥ 0, the solution to (2.1) satisfies the followingdecay estimates:
(2.2) ‖∂jt u(t, ·)‖H2k ≤ C e−c1t
(‖u0‖H2k+jσ + ‖u1‖H(2k+(j−1)σ)+
),
for some c1, C > 0. More precisely, c1 = a−√(a2 −m2)+ in (2.2).
In Proposition 2.1 and in the following, by (b)+ we denote the positive part ofa real number b, i.e., (b)+ = max{b, 0}.
We give a proof of Proposition 2.1 to provide a scheme of reasoning whichremains valid also in the general case (α, μ) �= (0, 0), with some differences.
Proof. First, let a > m. Then we are in case (A). Recalling (1.13),
u(t, ξ) = u+ + u− ≡ C+e(−a+√
a2−m2−|ξ|2σ)t + C−e(−a−√
a2−m2−|ξ|2σ)t,

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 97
for |ξ| < (a2 −m2)12σ , where
C± = C±(u0, u1) = ±(a±
√a2 −m2 − |ξ|2σ
)u0 + u1
2
√a2 −m2 − |ξ|2σ
.
On the other hand, recalling (1.14),
(2.3) u(t, ξ) = e−at(u0 cos
(t
√|ξ|2σ +m2 − a2
)+ C1 sin
(t
√|ξ|2σ +m2 − a2
)),
for |ξ| > (a2 −m2)12σ and for
C1 = C1(u0, u1) =au0 + u1√
|ξ|2σ +m2 − a2.
Let us write u as
u(t, ξ) = Ψ0(t, |ξ|) u0(ξ) + Ψ1(t, |ξ|) u1(ξ).
By Plancherel’s identity and Holder’s inequality,
‖u(t, ·)‖H2k ≤ ‖Ψ0‖L∞ ‖u0‖H2k + ‖(1 + |ξ|)2kΨ1‖L∞ ‖u1‖L2 ,
if j = 0 and 2k ≤ σ, or
‖∂jt u(t, ·)‖H2k = ‖(1 + |ξ|)2k∂j
t u(t, ·)‖L2
≤ ‖(1 + |ξ|)−jσ∂jtΨ0‖L∞ ‖u0‖H2k+jσ
+ ‖(1 + |ξ|)−(j−1)σ∂jtΨ1‖L∞ ‖u1‖H2k+(j−1)σ ,
otherwise.For |ξ| < (a2 −m2)
12σ , we may estimate any power of (1 + |ξ|) by constants,
therefore we simply obtain
|(1 + |ξ|)−jσ∂jtΨ0| � e−(a−
√a2−m2) t,
where we used the trivial property D(|ξ|) ≤ a2 −m2. Similarly for Ψ1. For |ξ| >(a2 − m2)
12σ , we pay more attention to the powers of (1 + |ξ|), that is, the regu-
larity of the data comes into play. Indeed, each time derivative of cos(√−D(|ξ|) t)
or sin(√−D(|ξ|) t) may bring a loss of regularity given by (1 + |ξ|)σ, since√
−D(|ξ|)) ≈ |ξ|σ, as |ξ| → ∞;
hence,
|(1 + |ξ|)−jσ∂jtΨ0| � e−at
and similarly for Ψ1. Therefore we proved (2.2).If a ≤ m, then we are in case (B) and u is given by (2.3) for all frequencies,
exception given for ξ = 0 when a = m. Still, the same reasoning above applies andone may prove again (2.2). �

98 MARCELLO D’ABBICCO
3. Diffusive structure at low frequencies
In case (A), namely either 2α < μ, or 2α = μ > 0 and a > m, a diffusivestructure appears at low frequencies. We notice that
λ−(|ξ|) ≈ −2a|ξ|2α, λ+(|ξ|) ≈ −m2
2a|ξ|2(μ−α),
as |ξ| → 0, if 2α < μ, or
λ±(|ξ|) ≈ (−a±√
a2 −m2)|ξ|μ,as |ξ| → 0, if 2α = μ and a > m.
Let χ ∈ C∞c ([0,∞)) be a cut-off function with sufficiently small support, namelysuppχ ⊂ [0, ε], with ε # k, where D(k) = 0, with the notation introduced in (A).We also assume that χ = 1 in some neighborhood of 0 and that χ is nonincreasingand nonnegative. To localize u at low frequencies, we consider uχ:=F
−1(χu).As we did in (1.13), we split the low-frequencies solution to (1.1) into uχ =
u+χ + u−
χ , where u±χ = F
−1(χu±).Let 2α < μ. We consider
(3.1)
⎧⎨⎩v+t +m2
2a(−�)μ−αv+ = 0,
v+(0, x) = v+0 (x),
and we fix
(3.2) v+0 :=(−�)αu0 +1
2au1,
Moreover, if α > 0, we also consider
(3.3)
{v−t + 2a(−�)αv− = 0,
v−(0, x) = v−0 (x),
and we fix
(3.4) v−0 :=−m2
4a2(−�)μ−αu0 −
1
2au1.
In the following, by (−�)−β, with β > 0, we denote the Riesz potential formally
defined by (−�)−βg = F−1(|ξ|−2β g). We also denote v±χ :=F−1(χv±).
We will show that u+χ and (−�)−αv+χ have the same asymptotic profile at
low-frequencies, as well as u−χ and (−�)−αv−χ when α > 0.
According to Lemma 2.1 in [1], the low-frequencies solution v+χ to (3.1) satisfiesthe following:
(3.5) ‖(−�)k−αv+χ (t, ·)‖Lq ≤ C (1 + t)−n
2(μ−α)(1p−
1q )−
k−αμ−α ‖v+0 ‖Lp ,
for any k ≥ 0 and 1 ≤ p ≤ q ≤ ∞, provided that
(3.6)1
p− 1
q≥ 2(α− k)+
n.
Similarly, if α > 0, then the low-frequencies solution v−χ to (3.3) satisfies
(3.7) ‖(−�)k−αv−χ (t, ·)‖Lq ≤ C (1 + t)−n2α− k
α+1 ‖v−0 ‖Lp ,
for any k ≥ 0 and 1 ≤ p ≤ q ≤ ∞, provided that (3.6) holds.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 99
Thanks to the expression of the equation in (3.1) and (3.3), it is clearly possibleto derive estimates also for the time-derivatives of v+χ , with no need to assume (3.6),
recalling that μ− α > α when considering v+χ .
For the sake of brevity, we only consider Lp −L2 estimates, with p ∈ [1, 2]. Toget Lp − Lq estimates with 1 ≤ p ≤ q ≤ ∞, it is possible to use Lemmas 3.1 and3.2 in [1]. Indeed, to simplify our analysis, later we will only estimate the L2 normof the high-frequencies solution u to (1.1) and its derivatives.
Setting q = 2, condition (3.6) becomes
(3.8)1
p− 1
2≥ 2(α− k)+
n.
We have the following.
Theorem 3.1. Let 2α < μ, u± be defined as in (1.13), and v+ be the low-frequencies solution to (3.1). Moreover, let as assume that
(3.9) σ ≥ 2μ− α.
Then
(3.10) ‖∂jt (u
+χ − (−�)−αv+χ )(t, ·)‖H2k
≤ C (1 + t)−n
2(μ−α)(1p−
12 )−j− k
μ−α−μ−2αμ−α
(‖u0‖Lp + (1 + t)
αμ−α ‖u1‖Lp
),
provided that j ≥ 1 or u1 ≡ 0, or that
(3.11)1
p− 1
2≥ 2(3α− μ− k)+
n.
Moreover, if α > 0 and v− is the low-frequencies solution to (3.3), then
(3.12) ‖∂jt (u
−χ − (−�)−αv−χ )(t, ·)‖H2k
≤ C (1 + t)−n2α (
1p−
12 )−j− k
α−μ−2αα
((1 + t)−
μ−2αα ‖u0‖Lp + (1 + t)‖u1‖Lp
),
provided that j ≥ 1 or u1 ≡ 0, or that (3.11) holds.
We remark that condition (3.11) is weaker than (3.8). We may drop assump-tion (3.11) in Theorem 3.1 if u1 ≡ 0 in (1.1) (see the proof).
In the decay in (3.10), we may identify different components:
• (1 + t)−n
2(μ−α)(1p−
12 ) is the same decay obtained in (3.5) for the solution
to the parabolic problem (3.1);
• (1 + t)−j− kμ−α is the additional decay obtained by taking time or space
derivatives;
• (1 + t)−μ−2α
α is the additional decay obtained taking the difference be-tween u+ and v+;
• (1 + t)−α
μ−α is the loss of decay appearing for the second data; it mayalso be interpreted as the effect of the application of the Riesz poten-tial (−�)−α to v+. This effect is neglected for u0 since v+0 = (−�)αu0 +u1.
Analogous observations are valid for (3.12).In particular, Theorem 3.1 shows that u+
χ has the same asymptotic profile
of (−�)−αv+χ (or v+χ if u1 ≡ 0) and u−χ has the same asymptotic profile of (−�)−αv−χ

100 MARCELLO D’ABBICCO
(or v−χ if u1 ≡ 0). Moreover, thanks to Theorem 3.1, it is possible to estimate uχ−v+χand uχ − (v+χ + v−χ ).
Assumption (3.9) comes into play to avoid any influence from the term (−�)σuin (1.1). This influence appears if the difference σ − μ is smaller than the differ-ence μ− α (see Remark 3.2).
Proof of Theorem 3.1. We prove (3.10), since (3.12) is analogous. By Plancherel’sTheorem, it is sufficient to estimate
|ξ|2k∂jt (u
+ − v+)(t, ξ)
in L2(Bε), for any t ≥ 0. Let us define:
λ†+:=−
m2
2a|ξ|2(μ−α)
, λ†−:=− 2a|ξ|2α.
For any |ξ| ≤ ε, we may write
|ξ|2k∂jt (u
+ − v+) = |ξ|2k−λ−u0 + u1
λ+ − λ−∂jt e
λ+t − |ξ|2k∂jt e
λ†+tv0
+.
Then, recalling the definition of v+0 in (3.2) we obtain
|ξ|2k∂jt (u
+ − v+) = |ξ|2k(λ+)j−λ−u0 + u1
λ+ − λ−eλ+t − |ξ|2k(λ†
+)jeλ
†+tv0
+
= |ξ|2k((λ+)
j −λ−λ+ − λ−
eλ+t − (λ†+)
jeλ†+t
)u0
+ |ξ|2k((λ+)
j 1
λ+ − λ−eλ+t − 1
2a(λ†
+)jeλ
†+t
)u1.
Therefore, by Holder’s inequality, it is sufficient to estimate the multipliers abovein Lr(Bε), where
(3.13)1
r:=
1
p− 1
2.
As |ξ| → 0, we may now compute
1
2a|ξ|2α(−λ− − 2a|ξ|2α) = 1
2
(√1− (1/a)2|ξ|2(σ−2α) − (m/a)2|ξ|2(μ−2α) − 1
)≈ −m2
4a2|ξ|2(μ−2α)
.
Taking advantage of the asymptotic behavior derived above, we also obtain
2a|ξ|2α(
1
λ+ − λ−− 1
2a|ξ|2α
)=
2a|ξ|2α − λ+ + λ−λ+ − λ−
≈ (2a|ξ|2α + λ−)− λ+
2a|ξ|2α≈ m2
4a2|ξ|2(μ−2α) .
To derive the asymptotic behavior of
eλ+t−λ†+t − 1 ≈ (λ+ − λ†
+)t

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 101
as |ξ| → 0, we should consider the Taylor expansion of the square root in λ+ untilthe second order. We get
λ+ − λ†+
a|ξ|2α= −
√1− (1/a)2|ξ|2(σ−2α) − (m/a)2|ξ|2(μ−2α) + 1− m2
2a2|ξ|2(μ−2α)
≈ 1
2(1/a)2|ξ|2(σ−2α)
+1
8
((m/a)2|ξ|2(μ−2α))2
.
Summarizing, for j = 0 we proved that
|ξ|2k|u+ − v+| � |ξ|2k+2(μ−2α)−2α�(1 + |ξ|2min{σ−μ,μ−2α}t)e−
m2
2a |ξ|2(μ−α)t|u�|,where � = 0, 1. Let t ≥ 1. If r = ∞ in (3.13) then, thanks to the change of
variable η = t1
2(μ−α) ξ, we obtain
(3.14) sup|ξ|≤ε
|ξ|2k+2(μ−2α)−2α�(1 + |ξ|2min{σ−μ,μ−2α}
t)e−
m2
2a |ξ|2(μ−α)t
= t−k+μ−2α−α
μ−α supη
P (η)e−m2
2a |η|2(μ−α)
,
where P (η) has an at most polynomial growth with respect to η. We remark thatassumption (3.9) played a fundamental role to derive (3.14).
Moreover, P (η) is not singular at η = 0 thanks to the assumption (3.11), whichguarantees that
k + μ− 2α− α� ≥ 0, � = 0, 1,
so that the supremum in (3.14) is bounded. Condition (3.11) does not come intoplay for � = 0; hence, we do not assume (3.11) if u1 ≡ 0.
If r ∈ [2,∞) in (3.13), the same change of variables produces an additional
decay t−n
2r(μ−α) with respect to the case r =∞. Indeed,
(3.15)
∫|ξ|≤ε
|ξ|(2k+2(μ−2α)−2α�)r(1 + |ξ|2(μ−2α)t)r
e−m2r2a |ξ|2(μ−α)t dξ
= t−n+2r(k+μ−2α−α)
2(μ−α)
∫|η|≤εt
− 12(μ−α)
Pr(η) e−r|η|2(μ−α)
dη.
Moreover, Pr(η) is not singular if
2r(k + μ− 2α− α�) ≥ −n.
Again, Pr(η) is not singular at η = 0 thanks to the assumption (3.11) and thiscondition does not come into play for � = 0. Therefore, the integral in (3.15) isbounded and we obtain:
‖|ξ|2k+2(μ−2α)−2α�(1 + |ξ|2(μ−2α)
t)e−
m2
2a |ξ|2(μ−α)t‖Lr(Bε) � t−n
2r(μ−α)−k+μ−2α−α
μ−α .
The estimate for t ≤ 1 is trivial, since |ξ| ≤ ε.Now let j ≥ 1. Thanks to
(λ+)j − (λ†
+)j ≈ cj
((m2/2a)|ξ|2(μ−α))j−1
(λ+ − λ†+),
for some cj > 0, we gain an additional decay t−j with respect to the case j = 0.Moreover, P (η) is not singular at η = 0, as well as Pr(η) for any r ∈ [2,∞). Again,we used assumption (3.9).
This concludes the proof of (3.10). �

102 MARCELLO D’ABBICCO
Remark 3.2. Thanks to assumption (3.9), Theorem 3.1 says that the decayrate appearing in the anomalous diffusion for the solution to (1.1) is the same thatwould appear if we neglect the term (−Δ)σu from the σ-evolution operator, i.e.,if we consider a damped μ-evolution operator [1,7]. Indeed, the power σ does notcome into play in (3.10) or (3.12).
If assumption (3.9) does not hold, the situation changes. It is still possible toestimate the differences u± − v±, but a loss of decay appears, due to the fact thatthe part of the solution related to the presence of (−�)σu in (1.1) can no longer beneglected at low frequencies. Indeed, if σ < 2μ− α, we have to replace (3.14) by
(3.16) sup|ξ|≤ε
|ξ|2k+2(μ−2α)−2α�(1 + |ξ|2min{σ−μ,μ−2α}
t)e−
m2
2a |ξ|2(μ−α)t
= t−k+σ−μ−3α−α
μ−α supη
P (η)e−m2
2a |η|,
Also, condition (3.11) should be modified accordingly. We obtain
(3.17) ‖∂jt (u
+χ − (−�)−αv+χ )(t, ·)‖H2k
≤ C (1 + t)−n
2(μ−α)(1p−
12 )−j− k
μ−α− σ−μμ−α
(‖u0‖Lp + (1 + t)
αμ−α ‖u1‖Lp
),
and, if α > 0,
(3.18) ‖∂jt (u
−χ − (−�)−αv−χ )(t, ·)‖H2k
≤ C (1 + t)−n2α(
1p−
12 )−j− k
α− σ−μα
((1 + t)−
μ−2αα ‖u0‖Lp + (1 + t)‖u1‖Lp
),
provided that j ≥ 1 or u1 ≡ 0, or that
(3.19)1
p− 1
2≥ 2(α+ μ− σ − k)+
n.
Nevertheless, the decay obtained for u+χ − v+χ is still better than the one obtained
for (−�)−αv+χ , that is, the asymptotic profile of u+χ , and therefore of uχ, remains
the same of (−�)−αv+χ .
As an immediate consequence of Theorem 3.1, Remark 3.2 and estimate (3.5),we have the following.
Corollary 3.3. Let 2α < μ < σ, and let u be the solution to (1.1). Then wehave the sharp decay estimate(3.20)
‖∂jt uχ(t, ·)‖H2k ≤ C (1 + t)−
n2(μ−α)(
1p−
12 )−j− k
μ−α(‖u0‖Lp + (1 + t)
αμ−α ‖u1‖Lp
),
provided that u1 ≡ 0, or that (3.8) holds.
If j = 0, u1 is not identically zero, and (3.8) does not hold, then we may relyon a different approach.
Theorem 3.4. Let 2α < μ < σ, and let u be the solution to (1.1). If (3.8)does not hold, then we have the estimate
(3.21) ‖uχ(t, ·)‖H2k ≤ C (1 + t)−n
2(μ−α)(1p−
12 )−
kμ−α
(‖u0‖Lp + t‖u1‖Lp
).
In (3.21) a loss of decay given by (1 + t)μ−2αμ−α appears, with respect to (3.20).

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 103
Proof. The main difference with the previous approach is a different strategyto estimate the multiplier for u1. Indeed, for |ξ| ≤ ε we may write
u = Ψ0u0 +Ψ1u1 ≡−λ− eλ+t + λ+ eλ−t
2√
D(|ξ|)u0 +
eλ+t − eλ−t
2√
D(|ξ|)u1,
and we may now estimate
0 ≤ eλ+t − eλ−t
2√
D(|ξ|)= eλ+t 1− e(λ−−λ+)t
2√
D(|ξ|)= eλ+t 1− e−
√D(|ξ|) t
2√
D(|ξ|)≤ 1
2t eλ+t.
This different approach avoids the problem related to the possible singularity of P (η)which appears if we separately estimate u+
χ and u−χ . Indeed, now
sup|ξ|≤ε
|ξ|2k|Ψ1| ≤ t sup|ξ|≤ε
|ξ|2ke−m2
2a |ξ|2(μ−α)t = t1−k
μ−α supη
η2ke−m2
2a |η|,
and similarly for the Lr(Bε) norm of Ψ1, where r is as in (3.13). The proof of (3.21)follows. �
Example 3.5. A classical model for which Theorem 3.1 may be applied is thebeam equation in (1.3). The diffusion phenomenon to the heat equation
v+t −Δv+ = 0, v+(0, x) = v+0 (x):=u0 + u1,
appears and one finds the estimate
(3.22) ‖∂jt (uχ − v+χ )(t, ·)‖H2k ≤ C (1 + t)−
n2 (
1p−
12 )−j−k−1 ‖(u0, u1)‖Lp .
Once again we emphasize the role played by condition (3.9), and that estimate (3.22)which regulates the diffusion phenomenon is the same that appears for the classicaldamped wave equation in (1.6) (see Remark 3.2).
3.1. Diffusive structure at low frequencies when μ = 2α. Let us considerthe special case 2α = μ > 0, with a > m. For the sake of brevity, we define a±:=a∓√
a2 −m2 and we consider the problems
(3.23)
{v±t + a±(−�)αv± = 0,
v±(0, x) = v±0 (x),
setting
(3.24) v±0 :=(−�)αu0 +1
a±u1.
Following the proof of Theorem 3.1 and Remark 3.2, taking into account that
λ± + a±|ξ|2α = ±√
a2 −m2|ξ|2α(√
1− (a2 −m2)−1|ξ|2(σ−2α) − 1),
for |ξ| ≤ ε, we may easily prove the following.
Theorem 3.6. Let 0 < μ = 2α < σ and v± be the low-frequencies solutionsto (3.23). Then
(3.25) ‖∂jt (uχ − (−�)−α(v+χ + v−χ )
)(t, ·)‖H2k
≤ C (1 + t)−n2α(
1p−
12 )−j− k
α− σ−2αα
(‖u0‖Lp + (1 + t)‖u1‖Lp
),

104 MARCELLO D’ABBICCO
where χv± = F−1(χv±), provided that j ≥ 1 or that
(3.26)1
p− 1
2≥ 2(3α− σ − k)+
n.
Analogously to Corollary 3.3 and Theorem 3.4, we have the following.
Theorem 3.7. Let 2α = μ < σ and a > m, and let u be the solution to (1.1).Then
(3.27) ‖uχ(t, ·)‖H2k ≤ C (1 + t)−n2α (
1p−
12 )−
kα(‖u0‖Lp + t‖u1‖Lp
).
4. Oscillations at low frequencies
Let μ < 2α or 0 < μ = 2α with a ≤ m, i.e., we consider cases (B) and (C).Now oscillations appear at low frequencies.
Let ε > 0 be sufficiently small, in particular the roots λ± are given by (1.8)for any |ξ| ≤ ε. We consider a nonincreasing, nonnegative function χ ∈ C∞c ([0,∞))with suppχ ⊂ [0, ε]. We also assume that χ = 1 in some neighborhood of 0.
First, let us exclude the case in which μ = 2α and a = m. We define ω = m
when μ < 2α and ω =√
m2 − a2 when μ = 2α and we consider
(4.1)
⎧⎪⎨⎪⎩wtt + ω2(−�)μw = 0,
w(0, x) = w0(x),
wt(0, x) = w1(x).
Then the low-frequencies part of u appears to be similar to e−at(−�)αw(t, x), where
(4.2) w0:=u0, w1:=u1 + a(−�)αu0.
Indeed, for |ξ| ≤ ε it holds
u = e−at|ξ|2α(u0 cos(It) +
u1 + a|ξ|2αu0
Isin(It)
),
where we put
I:=!λ+ =
√m2|ξ|2μ + |ξ|2σ − a2|ξ|4α,
and I ≈ ω|ξ|μ as |ξ| → 0. Due to the oscillations, a result analogous to Theorem 3.1
does not hold for u − e−at(−�)αw, in general. For this reason, we only derivethe decay estimates for the solution to (1.1), analogously to Corollary 3.3 andTheorem 3.4.
Theorem 4.1. Let μ < 2α or 0 < μ = 2α < σ with a ≤ m. Let u be thesolution to (1.1). Then
(4.3) ‖∂jt uχ(t, ·)‖H2k ≤ C (1 + t)−
n2α(
1p−
12 )−
jμ2α− k
α(‖u0‖Lp + (1 + t)
μ2α ‖u1‖Lp
).
if j ≥ 1, u1 ≡ 0 or
(4.4)1
p− 1
2≥ (μ− 2k)+
n.
Otherwise,
(4.5) ‖uχ(t, ·)‖H2k ≤ C (1 + t)−n2α (
1p−
12 )−
kα(‖u0‖Lp + t‖u1‖Lp
).
We notice that in the special case μ = 2α, with a ≤ m, estimate (4.3) for j ≥ 1and estimate (4.5) coincide with estimate (3.27), obtained for μ = 2α and a > m.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 105
Proof of Theorem 4.1. First, we exclude the special case μ = 2α and a =m. As in the proof of Theorem 3.1, By Plancherel’s Identity, we consider the L2(Bε)norm of
|ξ|2k∂jt u(t, ξ),
for any t ≥ 0. By Holder’s inequality, it is sufficient to estimate
|ξ|2k∂jtΨ0 = |ξ|2k ∂j
t
(e−at|ξ|2α(cos(It) + a|ξ|2αI−1 sin(It))
),
|ξ|2k∂jtΨ1 = |ξ|2k I−1 ∂j
t
(e−at|ξ|2α sin(It)
)in Lr(Bε), where r is given in (3.13). We distinguish two cases.
First, let us assume that j ≥ 1 or u1 ≡ 0 or that (4.4) holds. Due to the factthat I ≈ ω|ξ|μ and that μ ≤ 2α, we easily obtain
||ξ|2k∂jtΨ�| � |ξ|2k+jμ−μ�
e−at|ξ|2α , � = 0, 1;
hence, by the change of variable η = a|ξ|2αt, we derive
sup|ξ|≤ε
||ξ|2k∂jtΨ�| � sup
ηt−
2k+(j−)μ2α η2k+jμ−μ�e−η2α � t
2k+(j−)μ2α , � = 0, 1.
Here P (η) = η2k+jμ−μ� is not singular at η = 0 for � = 1 thanks to the assump-tion j ≥ 1 or (4.4). Similarly for r ∈ [2,∞).
If u1 is not identically zero, j = 0 and (4.4) does not hold, then we estimatethe oscillating term in Ψ1 by:
(4.6)| sin(It)|
I≤ t,
so that now P (η) = η2k is not singular at η = 0 in the estimate
sup|ξ|≤ε
||ξ|2kΨ1| � t supη
tkα η2ke−η2α � t1−
kα ,
and similarly for r ∈ [2,∞).The estimate for t ≤ 1 is trivial, since |ξ| ≤ ε.This concludes the proof of (4.3) and (4.5).Let us devote attention to the special case μ = 2α < σ and a = m. Now I =
|ξ|σ, therefore the vanishing speed of I−1 is faster than the general case. However,using (4.6) and recalling that μ = 2α, we are still able to prove (4.3). �
Remark 4.2. If μ < 2α = σ and a = 1, the equality u = e−t(−�)αw holds (atboth low and high frequencies).
Similarly, if μ = 2α < σ and a = m, the equality u = e−at(−�)αw holds (atboth low and high frequencies), where w is the solution to
(4.7)
⎧⎪⎨⎪⎩wtt + (−�)σw = 0,
w(0, x) = w0(x),
wt(0, x) = w1(x),
and w0, w1 are as in (4.2).

106 MARCELLO D’ABBICCO
5. Regularity at high frequencies
When we focus on high frequencies, the regularity of the data comes into play.The high frequencies part of the solution u to (1.1) exponentially decays in time.Moreover, if α ∈ (0, σ), a Gevrey smoothing effect appears. Namely, if u0, u1 ∈ L2
then
(5.1) u(t, ·) ∈ GsL2 , for any t > 0,
for some s depending on α and σ. We recall that a function g ∈ L2 belongs to theGevrey-L2 space Gs
L2 , where s > 1, if there exist δ > 0 such that eδ|ξ|s
g(ξ) ∈ L2,i.e., ∫
|ξ|≥1
e2δ|ξ|s
g(ξ)2dξ <∞.
However, near t = 0 the situation is more complicated; in particular, it is clearthat u �∈ C([0,∞), Gs
L2), in general. More precisely, the constant δ in the abovedefinition may depend on t and δ(t)→ 0 as t→ 0 if u0 �∈ Gs
L2 .
5.1. Oscillations at high frequencies. We assume that 2α < σ or 2α = σand a < 1, that is, we are in case (A) or (B).
Let M > 0 be sufficiently large, in particular D(|ξ|) < 0 for any |ξ| ≥ M ,so that the roots λ± are given by (1.8) for any |ξ| ≥ M . We consider a nonde-creasing nonnegative function Ψ ∈ C∞([0,∞)) such that suppΨ ⊂ [M,∞) for somelarge M > 0 and Ψ = 1 for |ξ| ≥M1, for some M1 > M . We denote uΨ:=F−1(Ψu).
Recalling (1.14), for |ξ| ≥M it holds
u = e−at|ξ|2α(u0 cos(It) +
u1 + a|ξ|2αu0
Isin(It)
),
where we put
I:=!λ+ =
√|ξ|2σ − a2|ξ|4α +m2|ξ|2μ,
and I ≈ ω|ξ|σ as |ξ| → ∞, where ω = 1 if 2α < σ and ω = 1 − a2 if a < 1. Inparticular, I = |ξ|σ in the special case μ = 2α < σ and a = m.
We have the following.
Theorem 5.1. Let 2α < σ or 0 < 2α = σ with a < 1. Let u be the solutionto (1.1). Then
(5.2) ‖∂jt uΨ(t, ·)‖H2k ≤ C e−ct
(‖u0‖H2k+jσ + ‖u1‖H(2k+(j−1)σ)+
),
for some c > 0. Moreover, if α > 0 then for any t > 0 there exists C = C(t) suchthat
(5.3) ‖∂jt uΨ(t, ·)‖Gs
L2≤ C e−ct ‖(u0, u1)‖L2 , for any t ≥ t,
for any s > (2α)−1 if α ∈ (0, 1/2) and for any s > 1 if α ≥ 1/2.
Proof. To prove (5.2), it is sufficient to estimate
|ξ|−jσ∂jtΨ0, |ξ|2k−(2k+(j−1)σ)+∂j
tΨ1,
in L∞([M,∞)), where
Ψ0:=e−at|ξ|2α cos(It) +a|ξ|2α sin(It)
I, Ψ1:=
sin(It)
I.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 107
Thanks to |ξ| ≥ M and I ≈ ω|ξ|σ, so that I−1 � |ξ|−σ, using that cos(It)and sin(It) are bounded and recalling that 2α ≤ σ, we immediately derive
sup|ξ|≥M
|ξ|−jσ|∂jtΨ0| � e−atM2α
, sup|ξ|≥M
|ξ|2k−(2k+(j−1)σ)+ |∂jtΨ1| � e−atM2α
,
uniformly for any t ≥ 0, which gives us (5.2).To prove (5.3) when α > 0, taking advantage of t ≥ t > 0, for any |ξ| ≥M , we
estimate
|ξ|2k∂jt
(e−at|ξ|2α cos(It)
)≤ C e−
a2 tM
2α |ξ|2k+jσe−
a2 t|ξ|
2α
.
Analogously for sin(It). The proof of (5.3) easily follows. �
Remark 5.2. In the special case 2α = σ and a = 1, the difference is given bythe fact that I = m|ξ|μ; hence the vanishing speed of I−1 is different. Therefore,following the proof of Theorem 5.1, we see that the estimate (5.2) becomes
‖∂jt uΨ(t, ·)‖H2k ≤ C e−ct
(‖u0‖H2k+(j+1)σ−μ + ‖u1‖H(2k−μ+jσ)+
),
that is, we have a loss of regularity of σ − μ derivatives. Estimate (5.3) remainsvalid.
5.2. Diffusive structure at high frequencies. We assume that 2α > σor 2α = σ and a > 1.
Let M > 0 be sufficiently large so that D(|ξ|) > 0 for any |ξ| ≥M , so that theroots λ± are given by (1.7) for any |ξ| ≥M . We consider a nondecreasing nonneg-ative function Ψ ∈ C∞([0,∞)) such that suppΨ ⊂ [M,∞) for some large M > 0and Ψ = 1 for |ξ| ≥M1, for some M1 > M . Again, we denote uΨ:=F−1(Ψu).
We notice that
(5.4) λ−(|ξ|) ≈ −2a|ξ|2α, λ+(|ξ|) ≈ −1
2a|ξ|2(σ−α),
as |ξ| → ∞, if 2α > σ, or
(5.5) λ±(|ξ|) ≈ (−a±√
a2 − 1)|ξ|σ,
as |ξ| → ∞, if 2α = σ and a > 1. Recalling (1.13), we split uΨ into u+Ψ + u−
Ψ,each one related to a different parabolic problem. However, due to the exponentialdecay, the additional vanishing speed which can be obtained by taking the differencebetween the hyperbolic and parabolic problems become less relevant.
Therefore, we only state a result analogous to Theorem 5.1.
Theorem 5.3. Let 2α > σ or 2α = σ with a > 1. Let u be the solution to (1.1).Then
(5.6) ‖∂jt uΨ(t, ·)‖H2k ≤ C e−ct
(‖u0‖H2(k+jα) + ‖u1‖H2(k+(j−1)α)+
),
for some c > 0. Moreover, if σ > α then for any t > 0 there exists C = C(t) suchthat (5.3) holds for any s > (2(σ − α))−1 if σ − α ∈ (0, 1/2) and for any s > 1if σ − α ≥ 1/2.
Proof. To prove (5.6), it is sufficient to estimate
|ξ|−2jα∂jtΨ0, |ξ|2k−2(k+(j−1)α)+∂j
tΨ1,

108 MARCELLO D’ABBICCO
in L∞([M,∞)), where
Ψ0 = Ψ+0 +Ψ−
0 :=−λ−
2√
D(|ξ|)eλ+t +
λ+
2√
D(|ξ|)eλ−t,
Ψ1 = Ψ+1 +Ψ−:=
1
2√
D(|ξ|)eλ+t +
−12√
D(|ξ|)eλ−t .
Let σ < 2α. Recalling (5.4) and (5.5), we may estimate, uniformly with respectto t ≥ 0, for any |ξ| ≥M
|ξ|−2jα|∂jtΨ
+0 | � |ξ|−2j(2α−σ)e−
12aM2(σ−α)t
|ξ|−2jα|∂jtΨ
−0 | � e−2aM2αt
|ξ|2k−2(k+(j−1)α)+ |∂jtΨ
+1 | �
{|ξ|−2j(2α−σ)e−
12aM
2(σ−α)t if j ≥ 1 or k ≥ 2α
|ξ|−(α−2k)e−
12aM2(σ−α)t if j = 0 and k ≤ 2α
|ξ|2k−2(k+(j−1)α)+ |∂jtΨ
−1 | �
{e−2aM2αt if j ≥ 1 or k ≥ 2α
|ξ|−(α−2k)e−2aM2αt if j = 0 and k ≤ 2α
The proof of (5.6) follows. To prove (5.3), we proceed as in the proof of Theorem 5.1.�
5.3. The intermediate frequencies. The expression of the multipliers forthe solution for intermediate frequencies influences neither the decay nor the reg-ularity of the solution. On the one hand, we may always use the exponentialterms eλ±t to produce an exponential decay in the form e−ct, by assuming |ξ| ≥ε > 0. On the other hand, no regularity issue appears, since |ξ| is bounded.
In case (B), i.e., when μ < 2α < σ, if a is sufficiently large with respect to m,there exist k1 < k2 such that the roots λ± are real-valued for |ξ| ∈ [k1, k2]. However,a diffusive structure which only appears if frequencies are away from both zero andinfinity appears to have a limited interest.
6. An application to the semilinear problem
As a consequence of the exponential decay in Proposition 2.1, small data globalsolutions exist for the related problem with power nonlinearity |u|q, for any q > 1.
Proposition 6.1. Let a > 0, m > 0 and σ > 0 in
(6.1)
⎧⎪⎨⎪⎩utt + (−�)σu+ 2aut +m2u = f(u) ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) ,
where f satisfies (1.12) for some q > 1, such that q ≤ 1 + 2σ/(n − 2σ) if n > 2σ.Then there exists ε > 0 such that for initial data
(u0, u1) ∈ A:=Hσ × L2, with ‖(u0, u1)‖A:=‖u0‖Hσ + ‖u1‖L2 ≤ ε,
there exists a unique solution u ∈ C([0,∞), Hσ) ∩ C1([0,∞), L2) to (6.1). Thesolution satisfies the decay estimates
‖u(t, ·)‖Hσ ≤ C e−c1t(‖u0‖Hσ + ‖u1‖L2
),(6.2)
‖ut(t, ·)‖L2 ≤ C e−c1t(‖u0‖Hσ + ‖u1‖L2
).(6.3)

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 109
In general, if 0 ≤ μ < σ and α ∈ [0, σ], with (α, μ) �= (0, 0), we may prove globalexistence of small data solutions for q > q or q ∈ (q, q], where q = q(n, μ, α) > 1,exception given for the special case μ = α = 0 described in Proposition 6.1, forwhich q(n, 0, 0) = 1. We notice that q does not depend on σ. On the otherhand, q = n/(n − 2max{σ, 2α}) when n > 2max{σ, 2α}, does not depend on μ.This critical exponent is strictly related to the decay estimates derived for u. InSections 3 and 4 we showed how the decay rate improves if data in energy spacesare also assumed to be in Lp, for some p ∈ [1, 2).
The best decay rate is obtained setting p = 1 in (3.20), (3.21), (3.27), (4.3)and (4.5). This implies that the critical exponent obtained by assuming smalldata in L1 and in the energy space is the lowest. Moreover, the decay in (3.21)is worse than the one in (3.20); similarly the decay in (4.5) is worse than the onein (4.3), exception given for the special case μ = 2α. Therefore, we will assume (3.8)with p = 1 and k = 0, i.e., n ≥ 4α, if 2α < μ and (4.4) with p = 1 and k = 0, i.e.,n ≥ 2μ, if μ < 2α. These assumptions may be dropped in the special case μ = 2α,since all the decay rates in the estimates cited above are equal.
In the following results, we only rely on the estimates above to prove the globalexistence result for the semilinear problem. This choice creates some technical re-strictions on the range of admissible space dimensions, depending on the Laplacianpowers α, μ, σ; in particular, we only consider the cases in which q(n, μ, α) ≥ 2.
In some cases, these restriction could be overcame or relaxed, by making dif-ferent choices for the linear estimates and for the data and solution spaces. Still,our purpose is only to show some applications of our estimates, and we are notinterested in extending the nonlinear result beyond a straightforward applicationof them. We refer the interested reader to [2,6,9,13], for different techniques andapproaches applied to the case of the damped wave equation with power nonlinear-ity.
Theorem 6.2. Let 0 ≤ 2α ≤ μ < σ with σ ≤ 2μ, and a,m > 0 in (1.11),with f as in (1.12) and
4α ≤ n ≤ 2(μ+ α),
if 2α < μ, or 1 ≤ n ≤ 3μ if μ = 2α. Let q > q, where
q = 1 +2μ
n− 2α,
and q ≤ 1 + 2σ/(n − 2σ) if n > 2σ. Then there exists ε > 0 such that for initialdata
(6.4) (u0, u1) ∈ A:=(L1 ∩Hσ)× (L1 ∩ L2),
with ‖(u0, u1)‖A:=‖(u0, u1)‖L1 + ‖u0‖Hσ + ‖u1‖L2 ≤ ε,
there exists a unique solution u ∈ C([0,∞), Hσ) ∩ C1([0,∞), L2) to (1.11). Thesolution satisfies the decay estimates
‖u(t, ·)‖L2 ≤ C (1 + t)−n−4α
4(μ−α) ‖(u0, u1)‖A ,(6.5)
‖u(t, ·)‖Hσ ≤ C (1 + t)−n+2(σ−2α)
4(μ−α) ‖(u0, u1)‖A ,(6.6)
‖ut(t, ·)‖L2 ≤ C (1 + t)−n+4(μ−2α)
4(μ−α) ‖(u0, u1)‖A .(6.7)

110 MARCELLO D’ABBICCO
The assumption σ ≤ 2μ can be removed, by modifying the proof of Theorem 6.2and obtaining a worse decay rate in (6.6), namely,
(6.8) ‖u(t, ·)‖Hσ ≤ C (1 + t)−1 ‖(u0, u1)‖A.
Theorem 6.3. Let 0 ≤ μ ≤ 2α ≤ σ with σ ≤ 4α, and a > 0, m > 0 in (1.11),with f as in (1.12) and
(6.9) 2μ ≤ n ≤ 2(μ+ α),
if 2α < μ, or 1 ≤ n ≤ 3μ if μ = 2α. We assume that a �= 1 if 2α = σ. Let q > q,where
(6.10) q = 1 +μ+ 2α
n− μ,
and q ≤ 1 + 2σ/(n − 2σ) if n > 2σ. Then there exists ε > 0 such that for initialdata as in (6.4), there exists a unique solution u ∈ C([0,∞), Hσ) ∩ C1([0,∞), L2)to (1.11). The solution satisfies the decay estimates
‖u(t, ·)‖L2 ≤ C (1 + t)−n−2μ4α ‖(u0, u1)‖A ,(6.11)
‖u(t, ·)‖Hσ ≤ C (1 + t)−n+2(σ−μ)
4α ‖(u0, u1)‖A ,(6.12)
‖ut(t, ·)‖L2 ≤ C (1 + t)−n4α ‖(u0, u1)‖A .(6.13)
As in Theorem 6.2, the assumption σ ≤ 4α can be removed, by modifying theproof of Theorem 6.3 and obtaining a worse decay rate in (6.12), namely, (6.8).
Theorem 6.4. Let 0 ≤ μ < σ ≤ 2α and a > 0, m > 0 in (1.11), with f asin (1.12) and n as in (6.9). We assume that a �= 1 if 2α = σ. Let q > q, with q asin (6.10), and q ≤ 1+4α/(n− 4α) if n > 4α. Then there exists ε > 0 such that forinitial data
(6.14) (u0, u1) ∈ A:=(L1 ∩H2α)× (L1 ∩ L2),
with ‖(u0, u1)‖A:=‖(u0, u1)‖L1 + ‖u0‖H2α + ‖u1‖L2 ≤ ε,
there exists a unique solution u ∈ C([0,∞), H2α) ∩ C1([0,∞), L2) to (1.11). Thesolution satisfies the decay estimates (6.11) and (6.13) together with
(6.15) ‖u(t, ·)‖H2α ≤ C (1 + t)−n+2(2α−μ)
4α ‖(u0, u1)‖A ,
We see that in the case 2α = μ, the statements of Theorems 6.2 and 6.3are equal, as well as the statements of Theorems 6.3 and 6.4 in the case 2α = σand a �= 1. In the special case 2α = σ and a = 1, due to the loss of regularitydiscussed in Remark 5.2, the statements of Theorems 6.3 and 6.4 are modified intothe following.
Theorem 6.5. Let us consider
(6.16)
⎧⎪⎨⎪⎩utt + (−�)2αu+ 2(−�)αut +m2(−�)μu = f(u) ,
u(0, x) = u0(x) ,
ut(0, x) = u1(x) ,
with 0 ≤ μ < 2α, m > 0, f as in (1.12) and n as in (6.9). Let q > 2 + 2α/μif n = 2μ, or q ∈ (q, 1 + 2α/(n − 2μ)], with q as in (6.10), if n > 2μ. Then

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 111
there exists ε > 0 such that for initial data as in (6.4), there exists a unique solu-tion u ∈ C([0,∞), Hμ) ∩ C1([0,∞), L2) to (1.11). The solution satisfies the decayestimates (6.11) and (6.13), as well as
(6.17) ‖u(t, ·)‖Hμ ≤ C (1 + t)−n4α ‖(u0, u1)‖A .
6.1. Proof of the nonlinear results. The strategy to prove Proposition 6.1and Theorems 6.2, 6.3, 6.4 and 6.5 is based on a classical contraction argument forthe operator N defined by
(6.18) Nw:=ulin + Fw, with Fw:=
∫ t
0
E(t− τ, x) ∗(x) f(w(τ, x)) dτ ,
where ulin(t, x) is the solution to (1.1), and E(t, x) is the fundamental solutionto (1.1) for u0 ≡ 0 and u1 = δ, the Dirac distribution.
Here and in the following, let κ = σ if we prove Proposition 6.1 and Theo-rems 6.2 and 6.3, κ = 2α if we prove Theorem 6.4 and κ = μ if we prove Theo-rem 6.5.
A function w ∈ C([0,∞), Hκ)∩C1([0,∞), L2) is a solution to (1.11) for any t ∈[0, T ] if, and only if, w = Nw in C([0,∞), Hκ) ∩ C1([0,∞), L2).
In order to prove the existence and uniqueness of this fixed point, for any T > 0,we introduce the space
(6.19) X(T ):=C([0, T ], Hκ) ∩ C1([0, T ], L2) ,
with norm given by
(6.20) ‖w‖X(T ):= maxt∈[0,T ]
ec1t (‖w(t, ·)‖Hσ + ‖wt(t, ·)‖L2).
if we prove Proposition 6.1, by
‖w‖X(T ):= maxt∈[0,T ]
(1 + t)n−4α
4(μ−α)(‖w(t, ·)‖L2(6.21)
+ (1 + t)σ
2(μ−α) ‖w(t, ·)‖Hσ + (1 + t)‖wt(t, ·)‖L2
),
if we prove Theorem 6.2, by
‖w‖X(T ):= maxt∈[0,T ]
(1 + t)n−2μ4α
(‖w(t, ·)‖L2(6.22)
+ (1 + t)κ2α ‖w(t, ·)‖Hκ + (1 + t)‖wt(t, ·)‖L2
),
if we prove Theorems 6.3, 6.4 and 6.5.If we are able to prove that the operator N satisfies
‖Nw‖X(T ) ≤ C1 ‖(u0, u1)‖A + C2 ‖w‖qX(T ),(6.23)
‖Nw −Nw‖X(T ) ≤ C ‖w − w‖X(T )
(‖w‖q−1
X(T ) + ‖w‖q−1X(T )
),(6.24)
where C1, C2 and C do not depend on T , then, by standard arguments (see, forinstance, [2]), we may derive the existence of a unique fixed point of N in X(T ),and so the existence of small data global solutions to (1.11), satisfying
(6.25) ‖u‖X(T ) ≤ C‖(u0, u1)‖A , uniformly for any T > 0.
Moreover, the desired estimates for the solution to the semilinear problem (1.11)follow thanks to (6.25) and the smallness of ‖(u0, u1)‖A, taking into account of thedefinitions of the norm of X(T ) chosen in (6.20), (6.21) and (6.22).

112 MARCELLO D’ABBICCO
Recalling the decay estimates obtained in the previous Sections for the linearproblem (1.1), we immediately see that
‖ulin‖X(T ) ≤ C1 ‖(u0, u1)‖A ,
thus (6.23) follows once we prove that
‖Fw‖X(T ) ≤ C ‖w‖qX(T ).(6.26)
On the other hand, it is clear that we may rewrite (6.24) as
‖Fw − Fw‖X(T ) ≤ C ‖w − w‖X(T )
(‖w‖q−1
X(T ) + ‖w‖q−1X(T )
).(6.27)
Therefore, the proofs of our nonlinear results follow once we prove (6.26) and (6.27).
First we prove Proposition 6.1. Even if the result is well-known, we prove it toemphasize the similarities and differences with the proof of the case (α, μ) �= (0, 0),for which we do not have exponential decay of the solution to the linear problem.
Proof of Proposition 6.1. Recalling (2.2), it holds
‖Fw(t, ·)‖Hσ + ‖∂t(Fw)(t, ·)‖L2 �∫ t
0
e−c1(t−τ) ‖f(w(τ, ·))‖L2 dτ.
We now use that Hσ ⊂ L2q with a continuous inclusion, being either q > 2 andn ≤ 2σ, or
2 < 2q ≤ 2q =2n
n− 2σ.
Thanks to (1.12), in particular |f(u)| � |u|q, we may derive
‖Fw(t, ·)‖Hσ + ‖∂t(Fw)(t, ·)‖L2 �∫ t
0
e−c1(t−τ) ‖w(τ, ·)‖qL2q dτ
�∫ t
0
e−c1(t−τ) ‖w(τ, ·)‖qHσ dτ.
Recalling that w ∈ X(T ), we may now estimate
‖Fw(t, ·)‖Hσ + ‖∂t(Fw)(t, ·)‖L2 � ‖w‖qX(T )
∫ t
0
e−c1(t−τ) e−c1qτ dτ
= e−c1t ‖w‖qX(T )
∫ t
0
e−c1(q−1)τ dτ.
The last integral is bounded, thanks to q > 1, therefore we proved (6.26). In orderto prove (6.27), we use (1.12) and Holder’s inequality to estimate
(6.28) ‖f(w)− f(w)‖L2 � ‖w − w‖L2q
(‖w‖q−1
L2q + ‖w‖q−1L2q
),
and we proceed as above. �
For the sake of brevity, we will only prove Theorem 6.2, since the proofs of The-orems 6.3, 6.4 and 6.5 are very similar. The following result will play a fundamentalrole (for the proof see, for instance, Lemma 3.3 in [12]):
(6.29)
∫ t
0
(1 + t− τ )−β(1 + τ )−γ dτ ≤ C(1 + t)−β, if β ≤ 1 < γ.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 113
Proof of Theorem 6.2. First we consider ‖Fw(t, ·)‖L2 . If 2α < μ, recallingthat n ≥ 4α, we may use (3.20) with k = j = 0 and p = 1 to derive a low-frequencies estimate, since (3.8) is satisfied. On the other hand, if 2α = μ, werely on (3.27). We combine this low-frequencies estimate with the high-frequenciesone (5.2). Therefore, we get
‖Fw(t, ·)‖L2 �∫ t
0
(1 + t− τ )−n4α
(‖f(w(τ, ·))‖L1 + ‖f(w(τ, ·))‖L2
)dτ.
Thanks to (1.12), in particular |f(u)| � |u|q, and to a fractional Gagliardo-Nirenberginequality, we obtain
‖f(w)‖L1 � ‖w‖qLq ≤ ‖w‖(1−θ1)qL2 ‖w‖θ1q
Hσ, θ1:=n
(1
2− 1
q
).
We used, in particular, that q > 2 as a consequence of q > q and n ≤ 2(μ + α).Similarly,
‖f(w)‖L2 � ‖w‖qL2q ≤ ‖w‖(1−θ2)qL2 ‖w‖θ2q
Hσ, θ2:=
n
2
(1− 1
q
).
In this latter inequality, the assumption q ≤ q comes into play when n > 2σ. Inparticular, we remark that θ2 > θ1. Recalling that w ∈ X(T ), we are now able toderive
‖Fw(t, ·)‖L2 � ‖w‖qX(T )
∫ t
0
(1 + t− τ )−n−4α
4(μ−α) (1 + τ )−n(q−1)−2α
2(μ−α) dτ.
Taking into account that n ≤ 2(μ+ α), we see that it holds
n− 4α
4(μ− α)≤ 1
2.
On the other hand, from q > q it follows that
n(q − 1)− 2α
2(μ− α)> 1.
Therefore, recalling (6.29), we obtain
‖Fw(t, ·)‖L2 � ‖w‖qX(T )(1 + t)−n−4α
4(μ−α) .
To deal with ‖∂t(Fw)(t, ·)‖L2 we need to modify our approach, since we cannotapply (6.29) when n > 4α, being
β =n− 4α
4(μ− α)+ 1 > 1.
Therefore, we split the integral in Fw into two parts and we use L1 − L2 low-frequencies estimates in [0, t/2] and L2 − L2 low-frequencies estimates in [t/2, t].We recall that (3.20) with p = 2 is applicable, since j = 1. Relying as above on

114 MARCELLO D’ABBICCO
Gagliardo-Nirenberg’s inequality and noticing that θ2q = θ1q + n/2, we get
‖∂t(Fw)(t, ·)‖L2 �∫ t/2
0
(1 + t− τ )−n−4α
4(μ−α)−1 (‖f(w(τ, ·))‖L1 + ‖f(w(τ, ·))‖L2
)dτ
+
∫ t
t/2
(1 + t− τ )α
μ−α−1 ‖f(w(τ, ·))‖L2 dτ
� ‖w‖qX(T )
∫ t/2
0
(1 + t− τ )−n−4α
4(μ−α)−1 (1 + τ )−
n(q−1)−2α2(μ−α) dτ
+ ‖w‖qX(T )
∫ t
t/2
(1 + t− τ )−μ−2αμ−α (1 + τ )−
n(q−1)−2α2(μ−α) − n
4(μ−α) dτ.
Since, (1 + t− τ ) ≈ 1 + t in [0, t/2] and 1 + τ ≈ 1 + t in [t/2, t], using again q > q,we may conclude that
‖∂t(Fw)(t, ·)‖L2 � ‖w‖qX(T ) (1 + t)−n−4α
4(μ−α)−1
∫ t/2
0
(1 + τ )−n(q−1)−2α
2(μ−α) dτ
+ ‖w‖qX(T ) (1 + t)−n(q−1)−2α
2(μ−α) − n4(μ−α)
∫ t
t/2
(1 + t− τ )−μ−2αμ−α dτ
� ‖w‖qX(T ) (1 + t)−n−4α
4(μ−α)−1.
We proceed analogously for ‖Fw(t, ·)‖Hσ :
‖(Fw)(t, ·)‖Hσ �∫ t/2
0
(1 + t− τ )−n+2(σ−2α)
4(μ−α)(‖f(w(τ, ·))‖L1 + ‖f(w(τ, ·))‖L2
)dτ
+
∫ t
t/2
(1 + t− τ )−σ−2α
2(μ−α) ‖f(w(τ, ·))‖L2 dτ
� ‖w‖qX(T )
∫ t/2
0
(1 + t− τ )−n+2(σ−2α)
4(μ−α) (1 + τ )−n(q−1)−2α
2(μ−α) dτ
+ ‖w‖qX(T )
∫ t
t/2
(1 + t− τ )−σ−2α
2(μ−α) (1 + τ )−n(q−1)−2α
2(μ−α)− n
4(μ−α) dτ
� ‖w‖qX(T ) (1 + t)−n+2(σ−2α)
4(μ−α)
∫ t/2
0
(1 + τ )−n(q−1)−2α
2(μ−α) dτ
+ ‖w‖qX(T ) (1 + t)−n(q−1)−2α
2(μ−α)− n
4(μ−α)
∫ t
t/2
(1 + t− τ )−σ−2α
2(μ−α) dτ
� ‖w‖qX(T ) (1 + t)−n+2(σ−2α)
4(μ−α) .
We remark that the assumption σ ≤ 2μ here was essential to guarantee that
σ − 2α
2(μ− α)≤ 1.
Without this assumption, we would only be able to prove
‖(Fw)(t, ·)‖Hσ � ‖w‖qX(T ) (1 + t)−n
4(μ−α)−1,
for any q > q. This restriction would influence the estimate for ‖u(t, ·)‖Hσ in (6.6),allowing us to obtain only (6.8), as well as the approach used to estimate ‖w‖Lq
and ‖w‖L2q . Therefore, for the sake of brevity, we do not discuss this case.

ASYMPTOTICS FOR DAMPED EVOLUTION OPERATORS 115
This concludes the proof of (6.26). The proof of (6.27) is similar, once we takeinto account of (6.28) and of
(6.30) ‖f(w)− f(w)‖L1 � ‖w − w‖Lq
(‖w‖q−1
Lq + ‖w‖q−1Lq
).
�
References
[1] M. D’Abbicco and M. R. Ebert, Diffusion phenomena for the wave equation with structuraldamping in the Lp–Lq framework, J. Differential Equations 256 (2014), no. 7, 2307–2336,
DOI 10.1016/j.jde.2014.01.002. MR3160444[2] M. D’Abbicco and M. R. Ebert, An application of Lp-Lq decay estimates to the semi-linear
wave equation with parabolic-like structural damping, Nonlinear Anal. 99 (2014), 16–34, DOI10.1016/j.na.2013.12.021. MR3160523
[3] M. D’Abbicco and M. Reissig, Semilinear structural damped waves, Math. Methods Appl.Sci. 37 (2014), no. 11, 1570–1592, DOI 10.1002/mma.2913. MR3225191
[4] Ryo Ikehata, Asymptotic profiles for wave equations with strong damping, J. DifferentialEquations 257 (2014), no. 6, 2159–2177, DOI 10.1016/j.jde.2014.05.031. MR3227294
[5] Ryo Ikehata, Yasuaki Miyaoka, and Takashi Nakatake, Decay estimates of solutions for dissi-
pative wave equations in RN with lower power nonlinearities, J. Math. Soc. Japan 56 (2004),no. 2, 365–373, DOI 10.2969/jmsj/1191418635. MR2048464 (2005b:35190)
[6] Ryo Ikehata and Kensuke Tanizawa, Global existence of solutions for semilinear damped wave
equations in RN with noncompactly supported initial data, Nonlinear Anal. 61 (2005), no. 7,1189–1208, DOI 10.1016/j.na.2005.01.097. MR2131649 (2005m:35192)
[7] Grzegorz Karch, Selfsimilar profiles in large time asymptotics of solutions to damped waveequations, Studia Math. 143 (2000), no. 2, 175–197. MR1813366 (2001k:35209)
[8] Pierangelo Marcati and Kenji Nishihara, The Lp-Lq estimates of solutions to one-dimensional damped wave equations and their application to the compressible flow throughporous media, J. Differential Equations 191 (2003), no. 2, 445–469, DOI 10.1016/S0022-0396(03)00026-3. MR1978385 (2004c:35247)
[9] Takashi Narazaki, Lp-Lq estimates for damped wave equations and their applications to semi-linear problem, J. Math. Soc. Japan 56 (2004), no. 2, 585–626, DOI 10.2969/jmsj/1191418647.
MR2048476 (2005a:35206)
[10] Takashi Narazaki and Michael Reissig, L1 estimates for oscillating integrals related to struc-tural damped wave models, Studies in phase space analysis with applications to PDEs,Progr. Nonlinear Differential Equations Appl., vol. 84, Birkhauser/Springer, New York, 2013,pp. 215–258, DOI 10.1007/978-1-4614-6348-1 11. MR3185897
[11] Kenji Nishihara, Lp-Lq estimates of solutions to the damped wave equation in 3-dimensionalspace and their application, Math. Z. 244 (2003), no. 3, 631–649. MR1992029 (2005b:35168)
[12] Piotr Biler, Time decay of solutions of semilinear strongly damped generalized wave equa-tions, Math. Methods Appl. Sci. 14 (1991), no. 6, 427–443, DOI 10.1002/mma.1670140607.MR1119240 (93c:35011)
[13] Grozdena Todorova and Borislav Yordanov, Critical exponent for a nonlinear waveequation with damping, J. Differential Equations 174 (2001), no. 2, 464–489, DOI10.1006/jdeq.2000.3933. MR1846744 (2002k:35218)
Departamento de Computacao e Matematica, Universidade de Sao Paulo (USP),
FFCLRP, Av. dos Bandeirantes, 3900, CEP 14040-901, Ribeirao Preto - SP - Brasil
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13182
Singular Perturbations of Elliptic Operators
E. Dyachenko and N. Tarkhanov
Abstract. We develop a new approach to the analysis of pseudodifferentialoperators with small parameter ε ∈ (0, 1] on a compact smooth manifold X .The standard approach assumes action of operators in Sobolev spaces whosenorms depend on ε. Instead, we consider the cylinder [0, 1] × X over X andstudy pseudodifferential operators on the cylinder which act, by the very na-ture, on functions depending on ε as well. The action in ε reduces to multipli-cation by functions of this variable and does not include any differentiation.As but one result we mention asymptotic of solutions to singular perturbationproblems for small values of ε.
1. Introduction
An excellent introduction into asymptotic phenomena in mathematical physicsis the survey [Fri55] which continues to be of current importance.
Most differential equations of physics possess solutions which involve quicktransitions, and it is an interesting task to study those features of these equationswhich make such quick transitions possible. A case in point is Prandtl’s ingeniousconception of the boundary layer. This is a narrow layer along the surface of abody, traveling in a fluid, across which the flow velocity changes quickly. Prandtl’sobservation of this quick transition was the starting point for his theory of fluidresistance, see [Pra05].
A large class of discontinuity phenomena in mathematical physics may beinterpreted as boundary layer phenomena. There was never any doubt that theboundary layer theory gives a proper account of physical reality, but its mathe-matical aspects remained a puzzle for some time. Only when this theory is fittedinto the framework of asymptotic analysis, does its mathematical structure becometransparent.
In such a systematic approach, one may develop an appropriate quantity inpowers of a parameter ε. This expansion is to be set up in such a way that thequantity is continuous for ε > 0 but discontinuous for ε = 0. A series expansionwith this character must have peculiar properties. In general, these series do not
2010 Mathematics Subject Classification. Primary 35B25; Secondary 34D15, 34E20.Key words and phrases. Singular perturbation, pseudodifferential operator, ellipticity with
parameter, regularization, asymptotics.This research was supported by the Russian Foundation for Basic Research, grant 11-01-
91330-NNIO a, and German Research Society (DFG), grant TA 289/4-2.
c©2015 E. Dyachenko and N. Tarkhanov
117

118 E. DYACHENKO AND N. TARKHANOV
converge. The idea of giving validity to these formal series is classical and it goesback to Poincare [Poi86].
The boundary layer in linear differential equations has been studied in detailin [VL57]. Using this method, it is possible to describe the iteration processes thatformally yield an asymptotic representation of the solution for small ε. To prove thisasymptotic representation, one needs a priori estimates for solutions of boundaryvalue problems in function spaces with weight norms. The well-known method ofconstruction of such estimates (see [Kon66, S. 4] makes it possible to obtain themfrom uniform estimates of boundary value problems with a small parameter in thehigher derivatives.
The asymptotic phenomena of ordinary differential equations have also beenstudied in connection with nonlinear equations. An interesting problem concernsperiodic solutions of a differential equation of the form εu′′ = f(u, u′). The ques-tion is what happens with these periodic solutions as ε → 0, in particular, if thelimit equation f(u, u′) = 0 has no periodic solution. Of course, there could be noboundary layer effect in the strict sense since there is no boundary. What happensis that the limit function, if it exists, satisfies the equation f(u, u′) = 0 exceptat certain points where the derivative u′ has a jump discontinuity. Strong resultson asymptotic periodic solutions have been obtained by Levinson since 1942, see[Lev50].
2. Loss of initial data
In this section, we demonstrate the behaviour of solutions of the initial problemto a first order ordinary differential equation as the parameter ε tends to zero. Thisquestion is extremely elementary, but nevertheless leads in a natural way to theboundary layer phenomenon.
To wit,
(2.1)
{ε u′(x) + q(x)u(x) = f(x) for x ∈ (a, b),
u(a) = u0,
where q and f are continuous functions on the interval [a, b) and ε a small positiveparameter. We prescribe an initial value u0 for the solution of our differentialequation at the point a and ask how the solution of this initial value problembehaves as ε→ 0.
Note that for ε = 0 the differential equation reduces to the equation of orderzero qu = f in (a, b). One may therefore wonder whether the solution of problem(2.1) approaches the solution
f(x)
q(x)
of the equation of order zero. Now the solution of the zero order equation is alreadydetermined and one cannot expect that the initial condition will be satisfied in thelimit. This question and related questions can easily be answered with the aid ofexplicit formulas.
An elementary calculation shows that
u(x) = exp(− 1
ε
∫ x
a
q(ϑ)dϑ)u0 +
1
ε
∫ x
a
exp(− 1
ε
∫ x
x′q(ϑ)dϑ
)f(x′)dx′
for x ∈ [a, b). The first term on the right-hand side satisfies the homogeneousdifferential equation ε u′ + qu = 0 in (a, b) and the initial condition u(a) = u0. If

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 119
q is positive in (a, b), then this term converges to zero uniformly away from a, asε→ 0. The second term on the right-hand side is a solution of the inhomogeneoussolution ε u′ + qu = f in (a, b) and satisfies the homogeneous initial conditionu(a) = 0.
If the solution of the zero order equation is continuously differentiable in [a, b),then one can transform the formula for the solution u of problem (2.1) to elucidatethe character of convergence of u for ε → 0. Namely, on integrating by parts oneobtains
u(x) =f(x)
q(x)+ exp
(− 1
ε
∫ x
a
q(ϑ)dϑ)(
u0 −f(a)
q(a)
)−
∫ x
a
exp(− 1
ε
∫ x
x′q(ϑ)dϑ
)(f(x′)
q(x′)
)′dx′(2.2)
for all x ∈ [a, b).Assume that q is positive in the interval (a, b). Then the second term on the
right-hand side of (2.2) converges to zero uniformly in x ∈ (a, b) bounded from a,when ε → 0. Moreover, this term vanishes for all x ∈ [a, b), if the solution of thezero order equation takes on the value u0 at a. The last term on the right-hand sideconverges to zero for each x ∈ [a, b), as ε→ 0, which is due to Lebesgue’s dominatedconvergence theorem. From what has been said, it follows that under appropriateconditions the solution of the initial problem converges to the solution of the zeroorder equation in (a, b) indeed. This solution fails to assume the initial value. Theprocess of losing an initial value takes place through nonuniform convergence. Ifthe parameter ε is small enough, the solution will run near the limit solution exceptin a small segment at the initial point a where it changes quickly in order, as itwere, to retrieve the initial value about to be lost. Thus a “quick transition” isfound to occur. It must occur since an initial condition is about to be lost, andthis loss in turn is necessary since the order of the differential equation is about todrop, cf. [Fri55].
The leading symbol which controls the asymptotic behaviour of the solution ofinitial problem (2.1) for ε→ 0 proves to be
σ0(x, ξ, ε) := iεξ + q(x)
regarded for (x, ξ) ∈ T ∗[a, b) and ε ∈ [0, 1). We get
|σ0(x, ξ, ε)| =(ε2|ξ|2 + |q(x)|2
)1/2≥ c 〈εξ〉(2.3)
where c is the smaller of the numbers 1 and inf |q(x)|, the infimum being overall x ∈ [a, b). From (2.3) it follows that σ0(x, ξ, ε) is different from zero for all(x, ξ) ∈ T ∗[a, b) and ε ∈ [0, 1), provided that inf |q(x)| > 0. And vice versa, if (2.3)is fulfilled with some constant c > 0 independent of (x, ξ) ∈ T ∗[a, b) and ε ∈ [0, 1),then inf |q(x)| > 0.
The first order ordinary differential equations satisfying condition (2.3) arecalled small parameter elliptic. This condition just amounts to saying that theequation is elliptic of order 1 for each fixed ε ∈ (0, 1), and it degenerates to a zeroorder elliptic equation when ε→ 0.
The results discussed in connection with the simple equation of the first orderare rather typical and they may frequently serve as a guide in understanding otherasymptotic phenomena.

120 E. DYACHENKO AND N. TARKHANOV
3. A passive approach to operator-valued symbols
Pseudodifferential operators with small parameter are most obviously intro-duced within the framework of operator-valued symbols. We describe here the so-called “passive” approach to operator-valued symbols which was used in [FST02]for edge and corner theory. In this case, it proves to be equivalent to the usualtheory based on the edge and corner Sobolev spaces with group action κλ. How-ever, it is more convenient to deal with. The passive approach allows one to reducepseudodifferential operators with operator-valued symbols to the case of integraloperators in L2 -spaces, so that the calculus of operator-valued symbols becomesquite similar to that of scalar-valued symbols. To the best of our knowledge, it goesback at least as far as [Kar83].
The term “passive” comes from analogy with transformation theory. Recallthat a geometrical transformation y = f(x) may be treated either from “active” or“passive” point of view. According to the “active” approach, the transformationmoves geometrical points x → y = f(x) while in the “passive” approach the pointsare fixed and we change only the coordinate system. For example, a linear changeyi = aijx
j (we use the Einstein summation notation) may be thought of as a lineartransformation of the space Rn or as a change of a basis in this space. Of course,both descriptions are equivalent.
We demonstrate this approach by calculus of pseudodifferential operators on aproduct manifold. Consider M = X × Y , where X , Y are smooth compact closedmanifolds with dimX = n and dimY = m. Suppose we work with the usualsymbol classes Sμ on M and corresponding classes of pseudodifferential operatorsLμ acting in Sobolev spaces Hs(M). We are aimed at describing these objectsusing a fibering structure. That is, we would like to introduce appropriate classesof operator-valued symbols on X with values in pseudodifferential operators on Yto recover the classes Sμ on M. Moreover, we would like to represent Hs(M) asL2 -spaces L2(X , Hs(Y), ‖ · ‖ξ) to recover the action of pseudodifferential operatorsfrom Lμ in the spaces Hs(M).
A symbol a(x, y, ξ, η) onM is treated as a symbol on the fiber Y with estimatesdepending on the base covariable ξ. To any appearances, the estimates mightinclude a group action κλ in function spaces on Y . Our present approach is basedon a “passive” treatment of the group action κλ. The κλ does not act on functions,instead we introduce a special family of norms in Hs(Y). In more detail, considerthe Sobolev space Hs(Y) with a family of norms ‖ · ‖ξ depending on a parameterξ ∈ Rn,
(3.1) ‖u(y)‖2ξ =∑j
∫Rm
|〈ξ, η〉sψju(η)|2 dη.
Here {Vj} is a coordinate covering of Y , {ψj} a subordinate partition of unity,〈υ〉 is a smoothed norm function, i.e., 〈υ〉 := f(|υ|) where f is a C∞ functionsatisfying
f(|υ|) ≥ 1,f(|υ|) ≡ |υ| for |υ| ≥ 1,
and 〈ξ, η〉 = f(√|ξ|2 + |η|2). The norm (3.1) depends, of course, on s but we drop
it in the notation.Next, consider a function u(x) on X with values in Hs(Y) equipped with the
family of norms ‖ · ‖ξ given by (3.1).

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 121
Definition 3.1. By L2(X , Hs(Y), ‖·‖ξ) is meant the completion of C∞(X , Hs(Y))with respect to the norm
(3.2) ‖u(x)‖2 =∑i
∫Rn
‖ϕiu(ξ)‖2ξ dξ.
Once again {ϕj} is a partition of unity on X subordinate to a coordinatecovering {Uj} of this manifold. Roughly speaking, (3.2) is an L2 -norm of thescalar-valued function ‖ϕiu(ξ)‖ξ.
We now are in a position to define the desired symbol classes Σm on X withvalues in pseudodifferential operators on Y .
Definition 3.2. A smooth function a(x, ξ) on Rn × Rn whose values are pseu-dodifferential operators on Y is said to belong to Σμ if, for any α, β ∈ Zn
≥0, the
operators ∂αxD
βξ a(x, ξ) : Hs(Y) → Hs−μ+β(Y) are bounded uniformly in ξ with
respect to the norms ‖ · ‖ξ in both spaces Hs(Y) and Hs−μ+β(Y). That is, thereare constants Cα,β independent of ξ, such that
(3.3) ‖∂αxD
βξ a(x, ξ)‖ξ ≤ Cα,β .
Any symbol a(x, y, ξ, η) ∈ Sμ defines a symbol a(x, ξ) ∈ Σμ on X with valuesin pseudodifferential operators on Y .
We can actually stop at this point. All of what follows is a simple consequenceof generalizations of these definitions. As mentioned, in a more general contextof pseudodifferential operators with operator-valued symbols these techniques waselaborated on in [Kar83].
It is easy to see that the norms ‖·‖ξ in Hs(Y) are equivalent for different valuesξ ∈ Rn, but this equivalence is not uniform in ξ. More precisely, applying Peetre’sinequality one sees that the norms vary slowly in ξ.
Lemma 3.3. There are constants C and q such that
(3.4)‖u‖ξ1‖u‖ξ2
≤ C 〈ξ1 − ξ2〉q
for all ξ1, ξ2 ∈ Rn and smooth functions u on Y. (In fact, we get C = 2|s| andq = |s|.)
On the other hand, the norm ‖ · ‖ξ is independent of the coordinate coveringand partition of unity up to uniform equivalence.
Lemma 3.4. The embedding ι : Hs2(Y)→ Hs1(Y) for s1 ≤ s2 admits the followingnorm estimate
(3.5) ‖ι‖ξ ≤ C 〈ξ〉s1−s2 .
Proof. Since
‖uj‖2Hs1 (Y),ξ =
∫Rm
|〈ξ, η〉s1 uj(η)|2dη
=
∫Rm
|〈ξ, η〉s2 uj(η)|2〈ξ, η〉2(s1−s2)dη,

122 E. DYACHENKO AND N. TARKHANOV
estimate (3.5) follows readily from the fact that
〈ξ, η〉s1−s2 ∼ (1 + |ξ|2 + |η|2)(s1−s2)/2
≤ (1 + |ξ|2)(s1−s2)/2
∼ 〈ξ〉s1−s2 ,
for s1 − s2 ≤ 0. �
Theorem 3.5. Let a(x, ξ) ∈ Σμ. If μ < 0, then a(x, ξ) : Hs(Y) → Hs(Y) is abounded operator and its norm satisfies an estimate
‖a(x, ξ)‖ξ ≤ C 〈ξ〉μ.Proof. By definition, the mapping a(x, ξ) : Hs(Y) → Hs−μ(Y) is bounded
uniformly in ξ. Applying Lemma 3.4, we conclude moreover that Hs−μ(Y) is em-bedded into Hs(Y) with the estimate ‖ι‖ξ ≤ C 〈ξ〉μ. This gives the desired re-sult. �
This result plays an important role in parameter-dependent theory of pseudo-differential operators.
Lemma 3.6. For each s ∈ R, it follows that
L2(X , Hs(Y), ‖ · ‖ξ) ∼= Hs(X × Y).As usual, the norm in Hs(X × Y) is defined by
‖u(x, y)‖2 =∑i,j
∫∫Rn×Rm
|〈ξ, η〉sφiψju(ξ, η)|2 dξdη.
For symbols a(x, ξ) ∈ Σm, we introduce a quantization map a → A = Q(a) bysetting
Q(a) =∑i
ϕi(x)Op (a(x, ξ)) ϕi(x).
Theorem 3.7. For a(x, ξ) ∈ Σm, the operator A = Q(a) extends to a boundedmapping
A : L2(X , Hs(Y), ‖ · ‖ξ)→ L2(X , Hs−μ(Y), ‖ · ‖ξ).Proof. In Fourier representation, f = Au gives
f(ξ) =
∫Rn
a(ξ − ξ′, ξ′)u(ξ′)dξ′
whence
‖f(ξ)‖Hs−μ(Y),ξ
≤∫Rn
‖a(ξ − ξ′, ξ′)u(ξ′)‖Hs−μ(Y),ξdξ′
≤ C
∫Rn
〈ξ − ξ′〉q‖a(ξ − ξ′, ξ′)u(ξ′)‖Hs−μ(Y),ξ′dξ′
≤ C
∫Rn
〈ξ − ξ′〉q‖a(ξ − ξ′, ξ′)‖L(Hs(Y),Hs−μ(Y)),ξ′‖u(ξ′)‖Hs(Y),ξ′dξ′
= C
∫O(〈ξ − ξ′〉−∞)‖u(ξ′)‖Hs(Y),ξ′dξ
′,

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 123
where by O(〈ξ − ξ′〉−∞) is meant O(〈ξ − ξ′〉−N ) for all N = 1, 2, . . .. So, we havereduced the problem to the boundedness of integral operators in L2 with kernelsO(〈ξ − ξ′〉−∞). This is evident. �
Obviously, the results of this section make sense in a much more general contextwhere the spaces Hs(Y) and Hs−μ(Y) on the fibers of X × Y over X are replacedby abstract Hilbert spaces V and W endowed with slowly varying families of normsparametrised by ξ ∈ Rn. In this way we obtain a rough class of pseudodifferentialoperators on X whose symbols take their values in L(V,W ) with uniformly boundednorms and which map L2(X , V, ‖ ·‖ξ) continuously to L2(X ,W, ‖ ·‖ξ). In Section 6,we develop this construction for another well-motivated choice of Hilbert spaces Vand W .
4. Operators with small parameter
In this section, we apply the “passive” approach on the product manifold X×Y ,where X is a smooth compact closed manifold of dimension n and Y = {P} is aone-point manifold.
Our purpose is to describe a calculus of singularly perturbed differential oper-ators on X . They are locally in the form
(4.1) A(x,D, ε) =∑
|α|−j≤μ|α|≤m
aα,j(x)εjDα,
where x = (x1, . . . , xn) are coordinates in a coordinate patch on X , D is the vectorof local derivatives −i∂x1 , . . . ,−i∂xn , ε ∈ (0, 1] a small parameter and we use thestandard multi-index notation for higher order derivatives in x. Moreover, μ isan integer with 0 ≤ μ < m. If μ = 0 then (4.1) reduce to the so-called h -pseudodifferential operators which belong to the basic techniques in semiclassicalanalysis, with h = ε.
Singular perturbations is a maturing mathematical subject with a fairly longhistory and holds great promise for continued important applications through-out science, see [Pra05], [Bir08], [VL57], [Was66], [MR80], [Fra79b,FW82,FW84], [Fra90], [Hue60], [Naz81], etc. Volevich [Vol06] was the first to presentthe small parameter theory as a part of general elliptic theory.
Operators of the form (4.1) are given natural domains Hr,s(X ) to be mappedinto Hr−m,s−μ(X ), where r, s are arbitrary real numbers. Seemingly these spaceswere first introduced in [Dem75]. More precisely, Hr,s(X ) is the completion ofC∞(X ) with respect to the norm
‖u‖2r,s =∑i
∫Rn
〈ξ〉2s|〈εξ〉2(r−s)ϕiu|2dξ,
where {ϕi} is a partition of unity on X subordinate to a coordinate covering {Ui}.By it very definition, Hr,s(X ) is a Hilbert space whose norm depends on the pa-rameter ε.
Remark 4.1. The space Hr,s(X ) is locally identified within abstract edge spacesHs(Rn, V,κ) with the group action κ on V = C given by κλu = λs−ru for λ > 0,see [ST05].

124 E. DYACHENKO AND N. TARKHANOV
One easily recovers the spaces Hr,s(X ) and Hr−m,s−μ(X ) as L2(X , V, ‖ · ‖ξ)and L2(X ,W, ‖ · ‖ξ), respectively, where V = C and W = C are endowed with thefamilies of norms
‖u‖ξ = |〈εξ〉r−s〈ξ〉su|,‖f‖ξ = |〈εξ〉(r−m)−(s−μ)〈ξ〉s−μf |
parametrised by ξ ∈ Rn.Definition 3.2 applies immediately to specify the corresponding spaces Σm,μ
of operator-valued symbols a(x, ξ, ε) on T ∗Rn depending on the small parameterε ∈ (0, 1]. We restrict ourselves to those symbols which depend continuously onε ∈ (0, 1] up to ε = 0. To wit, let Sm,μ be the space of all functions a(x, ξ, ε) of(x, ξ) ∈ T ∗Rn and ε ∈ (0, 1], which are C∞ in (x, ξ) and continuous in ε up toε = 0, such that
(4.2) |∂αxD
βξ a(x, ξ, ε)| ≤ Cα,β 〈εξ〉m−μ〈ξ〉μ−|β|
is fulfilled for all multi-indices α, β ∈ Zn≥0, where the constants Cα,β do not depend
on (x, ξ) and ε.Note that in terms of group action introduced in Remark 4.1, the symbol esti-
mates (4.2) take the form
|κ−1〈εξ〉∂
αxD
βξ a(x, ξ, ε)κ〈εξ〉| ≤ Cα,β 〈ξ〉μ−|β|
for all α, β ∈ Zn≥0 and ξ ∈ Rn uniformly in x ∈ Rn and ε ∈ (0, 1], cf. [ST05]. Given
any fixed ε ∈ (0, 1], these estimates reveal the order of the operator-valued symbola(x, ξ, ε) to be μ. Moreover, they give rise to appropriate homogeneity for symbolsa(x, ξ, ε). To this end, choose α = 0, β = 0 and substitute ξ → λξ and ε → ε/λ to(4.2), obtaining
|a(x, λξ, ε/λ)| ≤ C0,0 〈εξ〉m−μ〈λξ〉μ
for all λ > 1, which reduces to
(4.3) |λ−μa(x, λξ, ε/λ)| ≤ C0,0 〈εξ〉m−μ(λ−2 + |ξ|2)μ/2
(we use tacitly an equivalent expression√
1 + |ξ|2 for 〈ξ〉). If λ → ∞, then theright-hand side of (4.3) tends to a constant multiple of 〈εξ〉m−μ|ξ|μ.
Lemma 4.2. Suppose the limit
σμ(a)(x, ξ, ε) = limλ→∞
λ−μa(x, λξ, ε/λ)
exists for some x ∈ Rn and all ξ ∈ Rn, ε > 0. Then σμ(a)(x, ξ, ε) is homogeneousof degree μ in (ξ, ε−1).
It is worth pointing out that σμ(a)(x, ξ, ε) is actually defined on the wholesemiaxis ε > 0.
Proof. Let s > 0. Then
σμ(a)(x, sξ, ε/s) = limλ→∞
λ−μa(x, λsξ, ε/λs),
and so on setting λ′ = λs we get
σμ(a)(x, sξ, ε/s) = limλ′→∞
sμλ′−μa(x, λ′ξ, ε/λ′)
= sμσμ(a)(x, ξ, ε),
as desired. �

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 125
In particular, Lemma 4.2 applies to the full symbol of the differential operatorA(x,D, ε) given by (4.1).
Example 4.3. By its very origin, the full symbol a(x, ξ, ε) of (4.1) belongs to theclass Sm,μ and
σμ(a)(x, ξ, ε) = limλ→∞
λ−μ( ∑
|α|−j≤μ|α|≤m
aα,j(x)ξαεj λ|α|−j
)=
∑|α|−j=μ|α|≤m
aα,j(x)ξαεj
is well-defined.
In fact, the full symbol of any differential operator A(x,D, ε) of the form (4.1)expands as finite sum of homogeneous symbols of decreasing degree with step 1.More generally, one specifies the subspaces Sm,μ
phg in Sm,μ consisting of all polyho-mogeneous symbols, i.e., those admitting asymptotic expansions in homogeneoussymbols. To introduce polyhomogeneous symbols more precisely, we need a purelytechnical result.
Lemma 4.4. Let a be a C∞ function of (x, ξ) ∈ T ∗Rn \ {0} and ε > 0 satisfying
|∂αxD
βξ a(x, ξ, 1)| ≤ Cα,β 〈ξ〉m−|β| for |ξ| ≥ 1 and α, β ∈ Zn
≥0. If a is homogeneous
of degree μ in (ξ, ε−1), then χa ∈ Sm,μ for any excision function χ = χ(ξ) for theorigin in Rn.
Proof. Since each derivative ∂αxD
βξ a is homogeneous of degree μ − |β| in
(ξ, ε−1), it suffices to prove estimate (4.2) only for α = β = 0. We have to showthat there is a constant C > 0, such that
|χ(ξ)a(x, ξ, ε)| ≤ C 〈εξ〉m−μ〈ξ〉μ
for all (x, ξ) ∈ T ∗Rn and ε ∈ (0, 1]. Such an estimate is obvious if ξ varies in acompact subset of Rn, for χ vanishes in a neighbourhood of ξ = 0. Hence, there isno restriction of generality in assuming that |ξ| ≥ R, where R > 1 is large enough,so that χ(ξ) ≡ 1 for |ξ| ≥ R.
We distinguish two cases, namely, ε ≤ 〈ξ〉−1 and ε > 〈ξ〉−1. In the first case,we immediately get
|a(x, ξ, ε)| = 〈ξ〉μ|a(x, ξ/〈ξ〉, ε〈ξ〉)|≤ C 〈ξ〉μ,
where C is the supremum of |a(x, ξ′, ε′)| over all x, 1/√2 ≤ |ξ′| ≤ 1 and ε′ ∈ [0, 1].
Moreover, 〈εξ〉m−μ is bounded from below by a positive constant independent ofξ and ε, for ε|ξ| ≤ 1. This yields |a(x, ξ, ε)| ≤ C ′ 〈εξ〉m−μ〈ξ〉μ with some newconstant C ′, as desired.
Assume that ε > 〈ξ〉−1. Then ε−1 < 〈ξ〉 whence|a(x, ξ, ε)| = |ε−μ a(x, εξ, 1)|
≤ C ε−μ 〈εξ〉m
= C 〈εξ〉m−μ (ε−1〈εξ〉)μ

126 E. DYACHENKO AND N. TARKHANOV
with C a constant independent of x, ξ and ε. If μ > 0, then the factor (ε−1〈εξ〉)μis estimated by
(ε−2 + |ξ|2)μ/2 ≤ 2μ/2 〈ξ〉μ.If μ < 0 then this estimate is obvious, even without the factor 2μ/2. This establishesthe desired estimate. �
The family Sm−j,μ−j with j = 0, 1, . . . is used as usual to define asymptoticsums of homogeneous symbols. A symbol a ∈ Sm,μ is said to be polyhomogeneousif there is a sequence {aμ−j}j=0,1,... of smooth functions of (x, ξ) ∈ T ∗Rn \ {0} and
ε > 0 satisfying |∂αxD
βξ aμ−j(x, ξ, 1)| ≤ Cα,β 〈ξ〉m−j−|β| for |ξ| ≥ 1 and α, β ∈ Zn
≥0,
such that every aμ−j is homogeneous of degree μ − j in (ξ, ε−1) and a expands asasymptotic sum
(4.4) a(x, ξ, ε) ∼ χ(ξ)∞∑j=0
aμ−j(x, ξ, ε)
in the sense that a− χ
N∑j=0
aμ−j ∈ Sm−N−1,μ−N−1 for all N = 0, 1 , . . ..
The appropriate concept in abstract algebra to describe expansions like (4.4)is that of filtration. To wit,
Sm,μphg ∼
∞⊕j=0
(Sm−j,μ−jphg % Sm−j−1,μ−j−1
phg
).
Each symbol a ∈ Sm,μphg possesses a well-defined principal homogeneous symbol
of degree μ, namely, σμ(a) := aμ. To construct an algebra of pseudodifferentialoperators on X with symbolic structure, one need not consider full asymptoticexpansions like (4.4). It suffices to ensure that the limit σμ(a) exists and thedifference a − χσμ(a) belongs to Sm−1,μ−1. For more details, we refer the readerto Section 3.3 in [Fra90].
The class of polyhomogeneous symbols Sm,μphg with μ < 0 gains in significance if
we realise that
a(x, ξ, ε) ∼ ε−μχ(ξ)∞∑j=0
εj aμ−j(x, εξ, 1)
where aμ−j(x, εξ, 1) are homogeneous functions of degree 0 in (ξ, ε−1). Thus, anysymbol a ∈ Sm,μ
phg with μ < 0 factors through the power ε−μ which vanishes up toorder −μ at ε = 0.
We may now quantise symbols a ∈ Sm,μ as pseudodifferential operators on Xin just the same way as in Section 3. The space of operators A = Q(a) with symbolsa ∈ Sm,μ is denoted by Ψm,μ(X ).
Theorem 4.5. Let A ∈ Ψm,μ(X ). For any r, s ∈ R, the operator A extends to abounded mapping
A : Hr,s(X )→ Hr−m,s−μ(X )
whose norm is independent of ε ∈ [0, 1].
Proof. This is a consequence of Theorem 3.7. �

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 127
Let Ψm,μphg (X ) stand for the subspace of Ψm,μ(X ) consisting of those opera-
tors which have polyhomogeneous symbols. For A ∈ Ψm,μphg (X ), the principal ho-
mogeneous symbol of degree μ is defined by σμ(A) = σμ(a), where A = Q(a).
If σμ(A) = 0 then A belongs actually to Ψm−1,μ−1phg (X ). Hence, the mapping
A : Hr,s(X ) → Hr−m,s−μ(X ) is compact, for it factors through the compact em-bedding
Hr−m+1,s−μ+1(X ) ↪→ Hr−m,s−μ(X ).
Theorem 4.6. If A ∈ Ψm,μphg (X ) and B ∈ Ψn,ν
phg(X ), then BA ∈ Ψm+n,μ+νphg (X ) and
σμ+ν(BA) = σν(B)σμ(A).
Proof. See for instance Proposition 3.3.3 in [Fra90]. �As usual, an operator A ∈ Ψm,μ
phg (X ) is called elliptic if its symbol σμ(A)(x, ξ, ε)
is invertible for all (x, ξ) ∈ T ∗X \ {0} and ε ∈ [0, 1].
Theorem 4.7. An operator A ∈ Ψm,μphg (X ) is elliptic if and only if it possesses
a parametrix P ∈ Ψ−m,−μphg (X ), i.e., PA = I and AP = I modulo operators in
Ψ−∞,−∞(X ).
Proof. The necessity of ellipticity follows immediately from Theorem 4.6, forthe equalities PA = I and AP = I modulo Ψ−∞,−∞(X ) imply that σ−μ(P ) is theinverse of σμ(A).
Conversely, look for a parametrix P = Q(p) for A = Q(a), where p ∈ S−m,−μphg
has asymptotic expansion p ∼ p−μ+p−μ−1+ · · · . The ellipticity of A just amountsto saying that
σμ(A)(x, ξ, ε) ≥ c 〈εξ〉m−μ|ξ|μ
for all (x, ξ) ∈ T ∗X \ {0} and ε ∈ [0, 1], where the constant c > 0 does notdepend on x, ξ and ε. Hence, p−μ := (σμ(A))−1 gives rise to a “soft” parametrix
P (0) = Q(χp−μ) for A. More precisely, P (0) ∈ Ψ−m,−μphg (X ) satisfies P (0)A = I and
AP (0) = I modulo Ψ−1,−1(X ). Now, the standard techniques of pseudodifferentialcalculus applies to improve the discrepancies P (0)A − I and AP (0) − I, see forinstance [ST05]. �
To sum up the homogeneous components p−μ−j with j = 0, 1, . . ., one uses atrick of L. Hormander for asymptotic summation of symbols, see Theorem 3.6.3 in[Fra90].
Corollary 4.8. Assume that A ∈ Ψm,μphg (X ) is an elliptic operator on X . Then,
for any r, s ∈ R and any large R > 0, there is a constant C > 0 independent of ε,such that
‖u‖r,s ≤ C (‖Au‖r−m,s−μ + ‖u‖−R,−R)
whenever u ∈ Hr,s(X ).
Proof. Let P ∈ Ψ−m,−μphg (X ) be a parametrix of A given by Theorem 4.7.
Then we obtain
‖u‖r,s = ‖P (Au) + (I − PA)u‖r,s≤ ‖P (Au)‖r,s + ‖(I − PA)u‖r,s

128 E. DYACHENKO AND N. TARKHANOV
for all u ∈ Hr,s(X ). To complete the proof, it is now sufficient to use the mappingproperties of pseudodifferential operators P and I−PA formulated in Theorem 4.5.
�
5. Ellipticity with large parameter
Setting λ = 1/ε we get a “large” parameter. The theory of problems with largeparameter was motivated by the study of the resolvent of elliptic operators. Boththeories are parallel to each other. Substituting ε = 1/λ to (4.1) and multiplyingA by λm−μ yields
A(x,D, λ) =∑
|α|+j≤mj≤m−μ
aα,j(x)λjDα
in local coordinates in X . For this operator, the ellipticity with large parameterleads to the inequality∣∣∣∣ ∑
|α|+j=mj≤m−μ
aα,j(x)λjξα
∣∣∣∣ ≥ c 〈λ, ξ〉m−μ|ξ|μ,
which is a generalization of the Agmon-Agranovich-Vishik condition of ellipticitywith parameter corresponding to μ = 0, see [AV64], [Vol06] and the referencesgiven therein.
6. Another approach to parameter-dependent theory
In this section, we develop another approach to pseudodifferential operatorswith small parameter which stems from analysis on manifolds with singularities.In this area, the role of small parameter is played by the distance to singularitiesand it has been usually chosen as a local coordinate. Thus, the small parameteris included into functions under study as independent variable and the action ofoperators include also that in the small parameter. Geometrically, this approachcorresponds to analysis on the cylinder C = X×[0, 1] over a compact closed manifoldX of dimension n, see Fig. 1. Subject to the problem, its base ε = 0 can be thought
0�
��xn−1
�xn
�ε
1
��
��
Fig. 1. A cylinder C = X × [0, 1) over X
of as a singular point blown up by a singular transformation of coordinates. In thiscase, one restricts the study to functions which are constant on the base, taking onthe values 0 or ∞. In our problem, the base is regarded as part of the boundaryX ×{0} of the cylinder C, and so we distinguish the values of functions on the base.The top X × {1} is actually excluded from consideration by a particular choice offunction spaces on the segment Y = [0, 1], for we are interested in local analysis atε = 0.
Basically there are two possibilities to develop a calculus of pseudodifferentialoperators on the cylinder C. Either one thinks of them as pseudodifferential opera-tors on X with symbols taking on their values in an operator algebra on [0, 1]. Or

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 129
one treats them as pseudodifferential operators on the segment [0, 1] whose symbolsare pseudodifferential operators on X . Singularly perturbed problems require thefirst approach with symbols taking on their values in multiplication operators inL(V,W ), where
V = L2([0, 1], ε−2γ),W = L2([0, 1], ε−2γ)
with γ ∈ R.Any continuous function a ∈ C[0, 1] induces the multiplication operator u → au
on L2([0, 1], ε−2γ) that is obviously bounded. Moreover, the norm of this operatoris equal to the supremum norm of a in C[0, 1]. Hence, C[0, 1] can be specified as aclosed subspace of L(V,W ).
Pick real numbers μ and s. We endow the spaces V and W with the familiesof norms
‖u‖ξ = ‖〈ξ〉sκ−1〈ξ〉u‖L2([0,1],ε−2γ),
‖f‖ξ = ‖〈ξ〉s−μκ−1〈ξ〉f‖L2([0,1],ε−2γ)
parametrised by ξ ∈ Rn, where
(κλu)(ε) = λ−γ+1/2 u(λε),(κλf)(ε) = λ−γ+1/2 f(λε)
for λ ≤ 1.The space L2(X , V, ‖ · ‖ξ) is defined to be the completion of C∞(X , V ) with
respect to the norm
‖u‖2s,γ =∑i
∫Rn
‖ϕiu‖2ξdξ,
where {ϕi} is a C∞ partition of unity on X subordinate to a finite coordinatecovering {Ui}.
Remark 6.1. The space L2(X , V, ‖ · ‖ξ) is locally identified within abstract edgespaces Hs(Rn, V,κ) with the group action κ on V = L2([0, 1], ε−2γ) defined above,see [ST05].
In a similar way, one introduces the space L2(X ,W, ‖·‖ξ) whose norm is denotedby ‖ · ‖s−μ,γ . Set
Hs,γ(C) = L2(X , V, ‖ · ‖ξ),Hs−μ,γ(C) = L2(X ,W, ‖ · ‖ξ),
which will cause no confusion since the right-hand sides coincide for μ = 0, as iseasy to check. We are thus led to a scale of function spaces on the cylinder C whichare Hilbert.
Our next objective is to describe those pseudodifferential operators on C whichmap Hs,γ(C) continuously into Hs−μ,γ(C). To this end we specify the definition ofsymbol spaces, see (3.3). If a(x, ξ, ε) is a function of (x, ξ) ∈ T ∗Rn and ε ∈ [0, 1],which is smooth in (x, ξ) and continuous in ε, then a straightforward calculationshows that
‖∂αxD
βξ a(x, ξ, ε)‖L(V,W ),ξ = 〈ξ〉−μ sup
ε∈[0,1]
|(∂αxD
βξ a)(x, ξ, ε/〈ξ〉)|

130 E. DYACHENKO AND N. TARKHANOV
holds on all of T ∗Rn. We now denote by Sμ the space of all functions a(x, ξ, ε) of(x, ξ) ∈ T ∗Rn and ε ∈ [0, 1], which are smooth in (x, ξ) and continuous in ε andsatisfy
(6.1) |(∂αxD
βξ a)(x, ξ, ε/〈ξ〉)| ≤ Cα,β 〈ξ〉μ−|β|
for all multi-indices α, β ∈ Zn≥0, where Cα,β are constants independent of (x, ξ)
and ε.In terms of group action introduced in Remark 6.1, the symbol estimates (6.1)
take the form
‖κ−1〈ξ〉∂
αxD
βξ a(x, ξ, ε)κ〈ξ〉‖L(L2([0,1],ε−2γ)) ≤ Cα,β 〈ξ〉μ−|β|
for all (x, ξ) ∈ T ∗Rn and α, β ∈ Zn≥0, cf. [ST05]. In particular, the order of the
symbol a is μ. Moreover, using group actions in fibers V and W gives a direct wayto the notion of homogeneity in the calculus of operator-valued symbols on T ∗Rn.Namely, a function a(x, ξ, ε), defined for (x, ξ) ∈ T ∗Rn \{0} and ε > 0, is said to behomogeneous of degree μ if the equality a(x, λξ, ε) = λμκλa(x, ξ, ε)κ
−1λ is fulfilled
for all λ > 0. It is easily seen that a is homogeneous of degree μ with respect tothe group actions κ and κ if and only if a(x, λξ, ε/λ) = λμa(x, ξ, ε) for all λ > 0,i.e., a is homogeneous of degree μ in (ξ, ε−1). Thus, we recover the homogeneity ofsymbols invented in Section 4.
Lemma 6.2. Assume that the limit
σμ(a)(x, ξ, ε) = limλ→∞
λ−μκ−1λ a(x, λξ, ε)κλ
exists for some x ∈ Rn and all ξ ∈ Rn and ε > 0. Then σμ(a)(x, ξ, ε) is homoge-neous of degree μ.
Proof. Let s > 0 and let u = u(ε) be an arbitrary function of V . By thedefinition of group action, we get
σμ(a)(x, sξ, ε)u = limλ→∞
λ−μκ−1λ a(x, λsξ, ε)κλu
= sμκs
(lim
λ′→∞(λ′)−μκ−1
λ′ a(x, λ′ξ, ε)κλ′
)κ−1s u,
the second equality being a consequence of substitution λ′ = λs. Since the expres-sion in the parentheses just amounts to σμ(a)(x, ξ, ε), the lemma follows. �
The function σμ(a) defined away from the zero section of the cotangent bundleT ∗C is called the principal homogeneous symbol of degree μ of a. We also usethis designation for the operator A = Q(a) on the cylinder which is a suitablequantization of a.
Example 6.3. As defined above, the principal homogeneous symbol of differentialoperator (4.1) is
σμ(A)(x, ξ, ε) = limλ→∞
λ−μ( ∑
|α|−j≤μ|α|≤m
aα,j(x)(λξ)α(κ−1λ εjκλ
) )=
∑|α|−j=μ|α|≤m
aα,j(x)ξαεjκλ,
cf. Example 4.3.

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 131
Now one introduces the subspaces Sμphg in Sμ consisting of all polyhomogeneous
symbols, i.e., those admitting asymptotic expansions in homogeneous symbols. Todo this, we need an auxiliary result.
Lemma 6.4. Let a be a C∞ function of (x, ξ) ∈ T ∗Rn\{0} and ε > 0 with a ≡ 0 for|x| & 1. If a is homogeneous of degree μ, then χa ∈ Sμ for any excision functionχ = χ(ξ) for the origin in Rn.
Proof. Since each derivative ∂αxD
βξ a is homogeneous of degree μ − |β|, it
suffices to prove estimate (6.1) only for α = β = 0. We have to show that there isa constant C > 0, such that
‖κ−1〈ξ〉 (χ(ξ)a(x, ξ, ε))κ〈ξ〉‖L(L2([0,1],ε−2γ)) ≤ C 〈ξ〉μ
for all (x, ξ) ∈ T ∗Rn and ε ∈ [0, 1]. Such an estimate is obvious if ξ varies in acompact subset of Rn, for χ near ξ = 0. Hence, we may assume without loss ofgenerality that |ξ| ≥ R, where R > 1 is sufficiently large, so that χ(ξ) ≡ 1 for|ξ| ≥ R. Then
‖κ−1〈ξ〉 (χ(ξ)a(x, ξ, ε))κ〈ξ〉‖L(L2([0,1],ε−2γ)) = ‖a(x, ξ, ε/〈ξ〉)‖L(L2([0,1],ε−2γ))
≤ C 〈ξ〉μ,where
C = sup(x,ξ)∈T∗Rn
‖a(x, ξ/〈ξ〉, ε)‖L(L2([0,1],ε−2γ)).
From conditions imposed on a, it follows that the supremum is finite, which com-pletes the proof. �
In contrast to Lemma 4.4, no additional conditions are imposed here on aexcept for homogeneity. This might testify to the fact that the symbol classes Sμ
give the best fit to the study of operators (4.1).The family Sμ−j with j = 0, 1, . . . is used in the usual way to define asymptotic
sums of homogeneous symbols. A symbol a ∈ Sμ is called polyhomogeneous if thereis a sequence {aμ−j}j=0,1,... of smooth function of (x, ξ) ∈ T ∗Rn \ {0} and ε > 0,such that every aμ−j is homogeneous of degree μ − j in (ξ, ε−1) and a expands asasymptotic sum
(6.2) a(x, ξ, ε) ∼ χ(ξ)
∞∑j=0
aμ−j(x, ξ, ε)
in the sense that a− χ
N∑j=0
aμ−j ∈ Sμ−N−1 for all N = 0, 1, . . ..
Each symbol a ∈ Smphg admits a well-defined principal homogeneous symbol of
degree μ, namely, σμ(a) := aμ. We quantise symbols a ∈ Sμ as pseudodifferentialoperators on X similarly to Section 3. Write Ψμ(C) for the space of all operatorsA = Q(a) with a ∈ Sμ.
Theorem 6.5. Let A ∈ Ψμ(C). For any s, γ ∈ R, the operator A extends to abounded mapping
A : Hs,γ(C)→ Hs−μ,γ(C).

132 E. DYACHENKO AND N. TARKHANOV
Proof. This is a consequence of Theorem 3.7. �
Let Ψμphg(C) stand for the subspace of Ψμ(C) consisting of all operators with
polyhomogeneous symbols. For A = Q(a) of Ψμphg(C), the principal homogeneous
symbol of degree μ is defined by σμ(A) = σμ(a). If σμ(A) = 0 then A belongs to
Ψμ−1phg (C). When combined with Theorem 6.6 stated below, this result allows one to
describe those operators A on the cylinder which are invertible modulo operatorsof order −∞.
Theorem 6.6. If A ∈ Ψμphg(C) and B ∈ Ψν
phg(C), then BA ∈ Ψμ+νphg (C) and
σμ+ν(BA) = σν(B)σμ(A).
Proof. This is a standard fact of calculus of pseudodifferential operators withoperator-valued symbols. �
As usual, an operator A ∈ Ψμphg(C) is called elliptic if σμ(A)(x, ξ, ε) is invertible
for all (x, ξ, ε) away from the zero section of the cotangent bundle T ∗C of thecylinder.
Theorem 6.7. An operator A ∈ Ψμphg(C) is elliptic if and only if there is an operator
P ∈ Ψ−μphg(C), such that both PA = I and AP = I are fulfilled modulo operators of
Ψ−∞(C).
Proof. The necessity of ellipticity follows immediately from Theorem 6.6, forthe equalities PA = I and AP = I modulo Ψ−∞(C) imply that σ−μ(P ) is theinverse of σμ(A).
Conversely, look for an inverse P = Q(p) for A = Q(a) modulo Ψ−∞(C), wherep ∈ S−μ
phg has asymptotic expansion p ∼ p−μ+p−μ−1+ · · · . The ellipticity of A justamounts to saying that
σμ(A)(x, ξ, ε) ≥ c |ξ|μ
for all (x, ξ) ∈ T ∗X \{0} and ε ∈ [0, 1], where the constant c > 0 does not depend onx, ξ and ε. Hence, p−μ := (σμ(A))−1 gives rise to a “soft” inverse P (0) = Q(χp−μ)
for A. More precisely, P (0) ∈ Ψ−μphg(C) satisfies P (0)A = I and AP (0) = I modulo
operators of Ψ−1(C). Now, the standard techniques of pseudodifferential calculusapplies to improve the discrepancies P (0)A − I and AP (0) − I, see for instance[ST05]. �
We avoid the designation “parametrix” for P since the operators of Ψ−∞(C)need not be compact in Hs,γ(C).
Corollary 6.8. Assume that A ∈ Ψμphg(C) is an elliptic operator on C. Then, for
any s, γ ∈ R and any large R > 0, there is a constant C > 0 independent of ε, suchthat
‖u‖s,γ ≤ C (‖Au‖s−μ,γ + ‖u‖−R,γ)
whenever u ∈ Hs,γ(C).

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 133
Proof. Let P ∈ Ψ−μphg(C) be the inverse of A up to operators of Ψ−∞(C) given
by Theorem 4.7. Then we obtain
‖u‖s,γ = ‖P (Au) + (I − PA)u‖s,γ≤ ‖P (Au)‖s,γ + ‖(I − PA)u‖s,γ
for all u ∈ Hs,γ(C). To complete the proof it is now sufficient to use the mappingproperties of pseudodifferential operators P and I−PA formulated in Theorem 4.5.
�
We finish this section by evaluating the local norm in Hs,γ(C) to compare thisscale with the scale Hr,s(X ) used in Section 4. This norm is equivalent to that inL2(Rn, V, ‖ · ‖ξ), which is
‖u‖2s,γ =
∫Rn
〈ξ〉2s‖κ−1〈ξ〉u(ξ)‖
2L2([0,1],ε−2γ)dξ
=
∫Rn
〈ξ〉2s+2γ−1
∫ 1
0
ε−2γ |u(ξ, ε/〈ξ〉)|2dεdξ.
Substituting ε′ = ε/〈ξ〉 yields
‖u‖2s,γ =
∫Rn
〈ξ〉2s(∫ 1/〈ξ〉
0
(ε′)−2γ |u(ξ, ε′)|2dε′)dξ
=
∫ 1
0
(ε′)−2(γ+Δγ)(∫
〈ξ〉≤1/ε′(ε′〈ξ〉)2Δγ〈ξ〉2(s−Δγ)|u(ξ, ε′)|2dξ
)dε′,
which is close to
∫ 1
0
ε−2(γ+Δγ)‖u‖2Hs,s−Δγ(X )dε with any Δγ ∈ R.
Remark 6.9. The modern theory of pseudodifferential operators on manifolds withsingularities allows one to study the problem for compact manifolds X with bound-ary as well.
7. Regularization of singularly perturbed problems
The idea of constructive reduction of elliptic singular perturbations to regularperturbations goes back at least as far as [FW82]. For the complete bibliography,see [Fra90, p. 531].
The calculus of pseudodifferential operators with small parameter developed inSection 4 allows one to reduce the question of the invertibility of elliptic operatorsA ∈ Ψm,μ
phg (X ) acting from Hr,s(X ) into Hr−m,s−μ(X ) to that of the invertibility of
their limit operators at ε = 0 acting in usual Sobolev spaces Hs(X ) → Hs−μ(X ).To shorten notation, we write A(ε) instead of A(x,D, ε), and so A(0) ∈ Ψμ
phg(X ) isthe reduced operator.
Given any f ∈ Hr−m,s−μ(X ), consider the inhomogeneous equation A(ε)u = fon X for an unknown function u ∈ Hr,s(X ). We first assume that u ∈ Hr,s(X )satisfies A(ε)u = f in X .
Since the symbol σμ(A(ε))(x, ξ, ε) is invertible for all (x, ξ) ∈ T ∗X \ {0} andε ∈ [0, 1], it follows that A(0) is an elliptic operator of order μ. Hence, the Hodge
theory applies to A(0). According to this theory, there is an operator G ∈ Ψ−μphg(X )

134 E. DYACHENKO AND N. TARKHANOV
satisfying
(7.1)u = H0u+GA(0)u,f = H1f +A(0)Gf
for all distributions u and f on X , where H0 and H1 are L2(X ) -orthogonal pro-jections onto the null-spaces of A(0) and A(0)∗, respectively. (Observe that thenull-spaces of A(0) and A(0)∗ are actually finite dimensional and consist of C∞
functions.)
Applying G ∈ Ψ−μ,−μphg (X ) to both sides of the equality A(0)u+(A(ε)−A(0))u =
f on X , we obtain
(7.2) u−H0u = Gf −G (A(ε)−A(0))u
for each u ∈ Hr,s(X ). (We have used the first equality of (7.1).) This is a far-reaching generalization of formula (2.2), for the function Gf ∈ Hr−(m−μ),s(X ) isa solution of the unperturbed equation A(0)Gf = f , which is due to the secondequality of (7.1). Let μ ≤ m. Since the “coefficients” of A(ε) are continuous upto ε = 0, it follows that (A(ε)−A(0))u converges to zero in Hr−m,s−μ(X ) asε → 0. By continuity, G (A(ε)−A(0))u converges to zero in Hr−(m−μ),s(X ), andso u − H0u ∈ Hr,s(X ) converges to Gf in Hr−(m−μ),s(X ) as ε → 0. If μ > mthen in the same manner we can see that u −H0u ∈ Hr,s(X ) converges to Gf inHr,s(X ) as ε→ 0.
The solution u of A(ε)u = f need not converge to the solution Gf of thereduced equation, for both solutions are not unique. Formula (7.2) describes thelimit of the component u−H0u of u which is orthogonal to the space of solutionsof the homogeneous equation A(0)u = 0. This result gains in significance if theequation A(0)u = 0 has only zero solution, i.e., H0 = 0. The task is now to showthat from the unique solvability of the reduced equation it follows that A(ε)u = fis uniquely solvable if ε is small enough.
Theorem 7.1. Suppose that A(ε) ∈ Ψm,μ(X ) is elliptic. If the reduced operatorA(0) : Hs(X ) → Hs−μ(X ) is an isomorphism uniformly with respect to ε ∈ [0, 1],then A(ε) : Hr,s(X ) → Hr,s−μ(X ) is an isomorphism, too, for all ε ∈ [0, ε0] withsufficiently small ε0.
Proof. We only clarify the operator theoretic aspects of the proof. For symbolconstructions we refer the reader to Corollary 3.14.10 in [Fra90] and the commentsafter its proof given there.
To this end, write I = GA(0) + (I −GA(0)) whence
A(ε) = A(0) + (A(ε)−A(0))GA(0) + (A(ε)−A(0))(I −GA(0))
= (I + (A(ε)−A(0))G)A(0) + (A(ε)−A(0))(I −GA(0))
for all ε ∈ [0, 1]. As mentioned, the difference A(ε)−A(0) is small if ε ≤ 1 is smallenough. Hence, the operator
Q(ε) = I + (A(ε)−A(0))G
= H0 +A(ε)G
is invertible in the scaleHr,s(X ), provided that ε ∈ [0, ε0] where ε0 ≤ 1 is sufficientlysmall.

SINGULAR PERTURBATIONS OF ELLIPTIC OPERATORS 135
If the operator A(0) ∈ Ψμ(X ) is invertible in the scale of usual Sobolev spaces onX , then the product Q(ε)A(0) is invertible for all ε ∈ [0, ε0]. Hence, by decreasingε0 if necessary, we conclude readily that A(ε) is invertible for all ε ∈ [0, ε0], asdesired. �
The proof above gives more, namely,
(7.3)A(ε) = Q(ε)A(0) + S0(ε),
= A(0)Q(ε) + S1(ε),
where S0(ε) and S1(ε) have at most the same order as A(ε) and are infinitesimallysmall if ε→ 0.
From (7.3) it follows immediately that for the operator A(ε) to be invertiblefor small ε it is necessary and sufficient that A(0) would be invertible. Any rep-resentation of a singularly perturbed operator A(ε) in the form (7.3) is called aregularization of A(ε).
References
[AV64] M. S. Agranovich and M. I. Vishik, Elliptic problems with a parameter and parabolicproblems of general type, Uspekhi Mat. Nauk 19 (1964), no. 3, 53–161.
[Bir08] George D. Birkhoff, On the asymptotic character of the solutions of certain linear dif-ferential equations containing a parameter, Trans. Amer. Math. Soc. 9 (1908), no. 2,219–231, DOI 10.2307/1988652. MR1500810
[BdM71] Louis Boutet de Monvel, Boundary problems for pseudo-differential operators, ActaMath. 126 (1971), no. 1-2, 11–51. MR0407904 (53 #11674)
[Dem75] A. S. Demidov, Asymptotic behavior of the solution of a boundary value problem forelliptic pseudodifferential equations with a small parameter multiplying the highest oper-ator (Russian), Trudy Moskov. Mat. Obsc. 32 (1975), 119–146. MR0415691 (54 #3771)
[DT13] E. Dyachenko, and N. Tarkhanov, Degeneration of boundary layer at singular points, J.of Siberian Federal University 6 (2013), no. 3, 283–297.
[Esk73] G. I. Eskin, Asymptotic properties of the solutions of elliptic pseudodifferential equa-tions with a small parameter (Russian), Dokl. Akad. Nauk SSSR 211 (1973), 547–550.MR0425324 (54 #13280)
[FST02] B. Fedosov, B.-W. Schulze, and N. Tarkhanov,Analytic index formulas for elliptic corneroperators (English, with English and French summaries), Ann. Inst. Fourier (Grenoble)52 (2002), no. 3, 899–982. MR1907392 (2003k:58032)
[Fra77] Leonid S. Frank, General boundary value problems for ordinary differential equationswith small parameter, Ann. Mat. Pura Appl. (4) 114 (1977), 27–67. MR0508318(58 #22744)
[Fra79a] Leonid S. Frank, Elliptic difference singular perturbations, Ann. Mat. Pura Appl. (4)122 (1979), 315–363, DOI 10.1007/BF02411699. MR565074 (81g:65130)
[Fra79b] Leonid S. Frank, Coercive singular perturbations. I. A priori estimates, Ann. Mat. PuraAppl. (4) 119 (1979), 41–113, DOI 10.1007/BF02413170. MR551218 (81b:35025)
[Fra90] Leonid S. Frank, Singular perturbations. I. Spaces and singular perturbations on man-ifolds without boundary, Studies in Mathematics and its Applications, vol. 23, North-Holland Publishing Co., Amsterdam, 1990. MR1071175 (91i:58144)
[FW82] L. S. Frank and W. D. Wendt, Coercive singular perturbations. II. Reduction andconvergence, J. Math. Anal. Appl. 88 (1982), no. 2, 464–504, DOI 10.1016/0022-247X(82)90207-4. MR667072 (83m:35019)
[FW84] L. S. Frank and W. D. Wendt, Coercive singular perturbations. III. Wiener-Hopf oper-ators, J. Analyse Math. 43 (1983/84), 88–135, DOI 10.1007/BF02790179. MR777413(86i:47033)
[Fri55] K. O. Friedrichs, Asymptotic phenomena in mathematical physics, Bull. Amer. Math.Soc. 61 (1955), 485–504. MR0074614 (17,615d)
[Hue60] Denise Huet, Phenomenes de perturbation singuliere dans les problemes aux limites(French), Ann. Inst. Fourier. Grenoble 10 (1960), 61–150. MR0118968 (22 #9737)

136 E. DYACHENKO AND N. TARKHANOV
[Il’92] A. M. Il′in, Matching of asymptotic expansions of solutions of boundary value problems,Translations of Mathematical Monographs, vol. 102, American Mathematical Society,Providence, RI, 1992. Translated from the Russian by V. Minachin [V. V. Minakhin].MR1182791 (93g:35016)
[Kar83] A. I. Karol′, Pseudodifferential operators with operator-valued symbols (Russian), Op-erator theory and function theory, No. 1, Leningrad. Univ., Leningrad, 1983, pp. 33–46.MR768775 (85m:47056)
[KC81] J. Kevorkian and Julian D. Cole, Perturbation methods in applied mathematics, AppliedMathematical Sciences, vol. 34, Springer-Verlag, New York-Berlin, 1981. MR608029(82g:34082)
[Kon66] V. A. Kondrat′ev, Boundary value problems for parabolic equations in closed regions(Russian), Trudy Moskov. Mat. Obsc. 15 (1966), 400–451. MR0209682 (35 #579)
[Lev50] Norman Levinson, Perturbations of discontinuous solutions of non-linear systems ofdifferential equations, Acta Math. 82 (1950), 71–106. MR0035356 (11,722b)
[MR80] E. F. Mishchenko and N. Kh. Rozov, Differential equations with small parameters andrelaxation oscillations, Mathematical Concepts and Methods in Science and Engineer-ing, vol. 13, Plenum Press, New York, 1980. Translated from the Russian by F. M. C.Goodspeed. MR750298 (85j:34001)
[Naz81] S. A. Nazarov, Vishik-Lyusternik method for elliptic boundary value problems in do-mains with conical points, I-III, Sib. Mat. Zh. 22 (1981), No. 4, 142–163; 22 (1981),No. 5, 132–152; 25 (1984), No. 6, 106–115.
[Poi86] H. Poincare, Sur les integrales irregulieres: Des equations lineaires (French), Acta Math.8 (1886), no. 1, 295–344, DOI 10.1007/BF02417092. MR1554701
[Pra05] L. Prandtl, Uber Flussigkeitsbewegung bei kleiner Reibung, Verhandl. III. Int. Math.-Kongresses, Teubner, Leipzig, 1905, pp. 484–491.
[ST05] Bert-Wolfgang Schulze and Nikolai Tarkhanov, Pseudodifferential operators withoperator-valued symbols, Complex analysis and dynamical systems II, Contemp.Math., vol. 382, Amer. Math. Soc., Providence, RI, 2005, pp. 365–383, DOI10.1090/conm/382/07076. MR2175904 (2006g:58046)
[VL57] M. I. Visik and L. A. Lyusternik, Regular degeneration and boundary layer for lineardifferential equations with small parameter (Russian), Uspehi Mat. Nauk (N.S.) 12(1957), no. 5(77), 3–122. MR0096041 (20 #2539)
[Vol06] L. R. Volevich, The Vishik-Lyusternik method in elliptic problems with a small parame-ter (Russian, with Russian summary), Tr. Mosk. Mat. Obs. 67 (2006), 104–147; Englishtransl., Trans. Moscow Math. Soc. (2006), 87–125. MR2301592 (2008h:35057)
[Was66] Wolfgang Wasow, Asymptotic expansions for ordinary differential equations, Pure andApplied Mathematics, Vol. XIV, Interscience Publishers John Wiley & Sons, Inc., NewYork-London-Sydney, 1965. MR0203188 (34 #3041)
Universitat Potsdam, Institut fur Mathematik, Am Neuen Palais 10, 14469 Potsdam,
Germany
E-mail address: [email protected]
Universitat Potsdam, Institut fur Mathematik, Am Neuen Palais 10, 14469 Potsdam,
Germany
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13183
An Initial-Boundary Value Problem in aStrip for Two-Dimensional Equations
of Zakharov–Kuznetsov Type
Andrei V. Faminskii
Abstract. An initial-boundary value problem in a strip with homogeneousDirichlet boundary conditions for the two-dimensional generalized Zakharov–Kuznetsov equation is considered. In particular, dissipative and absorbingdegenerate terms can be supplemented to the original Zakharov–Kuznetsovequation. Results on global existence, uniqueness and long-time decay of weaksolutions are established.
1. Introduction. Description of main results
The two-dimensional Zakharov–Kuznetsov equation (ZK)
ut + uxxx + uxyy + uux = 0
models propagation of ion-acoustic waves in magnetized plasma, [22]. A rigorousderivation of the ZK model was recently performed in [13]. Results on well-posedness of the initial value problem for this equation can be found in [5, 6,17, 19]. A theory of well-posedness of initial-boundary value problems is mostdeveloped for domains of type I×R, where I is an interval (bounded or unbounded)on the variable x, that is, the variable y varies in the whole line [4,7–11,20]. Onthe contrary, there are only a few results for domains, where the variable y variesin a bounded interval.
In [18], an initial-boundary value problem in a strip R× (0, 2π) with periodicboundary conditions was considered and a local well-posedness result was estab-lished in the spaces Hs for s > 3/2. An initial-boundary value problem in ahalf-strip R+× (0, L) with homogeneous Dirichlet boundary conditions was studiedin [14, 16] and global well-posedness in Sobolev spaces with exponential weightswhen x → +∞ was proved. Initial-boundary value problems in a strip R × (0, L)with homogeneous boundary conditions of different types – Dirichlet, Neumann orperiodic – were considered in [2] and results on global well-posedness in classes ofweak solutions with power weights at +∞ were established. Global well-posednessresults for a bounded rectangle can be found in [4,21].
2010 Mathematics Subject Classification. Primary 35Q53; Secondary 35D30.Key words and phrases. Zakharov–Kuznetsov equation, initial-boundary value problem,
weak solutions, decay.The work was supported by Project 333, State Assignment in the field of scientific activity
implementation of Russia.
c©2015 A.V. Faminskii
137

138 A.V. FAMINSKII
All global existence results for the ZK equation are based on a conservationlaw in L2 ∫∫
Ω
u2(t, x, y) dxdy = const,
where Ω is a domain of type R × I, or its analogues for other types of domains.Note that in the situations where such a conservation law exists there is no decayof solutions in L2-norms when t→ +∞.
On the other hand, it was established in [16] that the ZK equation possessesa certain internal dissipation which can provide decay of solutions in weighted L2-norms. More precisely, it was shown in [16] that in a narrow half-strip R+ × (0, L)under small initial data and homogeneous Dirichlet boundary conditions, a solutionto the corresponding initial-boundary value problem decays exponentially whent → +∞ in L2 space with exponential weight at +∞. In [14], with the use of thenext conservation law, ∫∫
Ω
(u2x + u2
y +1
3u3
)dxdy = const
a similar decay result was proved inH1-norm (also in exponentially-weighted space).In the recent paper [15], a similar result was obtained for a ZK-type equation
with additional damping term −uxx in a strip R×(0, L) with homogeneous Dirichletboundary conditions. Moreover, it was noticed there that under the appropriatechoice of weight functions, restrictions on the width of the strip can be excluded.
In [4], exponential long-time decay in L2-norm of small solutions was estab-lished for initial-boundary value problems in a bounded rectangle and in a verticalstrip.
The present paper is devoted to an initial-boundary value problem in a layerΠT = (0, T )× Σ, where Σ = R× (0, L) = {(x, y) : x ∈ R, 0 < y < L} is a strip of agiven width L and T > 0 is arbitrary, for an equation(1.1)ut + bux + uxxx +uxyy +uux− (a1(x, y)ux)x− (a2(x, y)uy)y + a0(x, y)u = f(t, x, y)
with an initial condition
(1.2) u(0, x, y) = u0(x, y), (x, y) ∈ Σ,
and homogeneous Dirichlet boundary conditions
(1.3) u(t, x, 0) = u(t, x, L) = 0, (t, x) ∈ (0, T )× R.
Here bux is a travel term (b is a real constant). We always assume that
(1.4) a1(x, y), a2(x, y) ≥ 0 ∀(x, y) ∈ Σ,
so the corresponding terms in (1.1) mean the parabolic damping which, in partic-ular, can degenerate or even be absent.
The main goal of this paper is to study relations between internal propertiesof the ZK equation itself and artificial damping implemented by dissipation orabsorption which provide existence and uniqueness of global weak solutions to theconsidered problem as well as their long-time decay in L2-norms with differentweights (or without them).
Some of the established results are valid for the ZK equation itself (a0 = a1 =a2 ≡ 0) and in this situation partially coincide with corresponding ones from [2](in the part related to existence and uniqueness).

ZAKHAROV–KUZNETSOV EQUATION 139
In all the results, we assume that
(1.5) aj ∈ L∞(Σ), j = 0, 1, 2
(sometimes we need more smoothness). In addition, most of the results are estab-lished in four different situations:
1) the parabolic damping can be absent;2) it is effective at both infinities, that is, there exist a > 0, R > 0 such that
(1.6) a1(x, y), a2(x, y) ≥ a if |x| ≥ R;
3) it is effective at −∞, that is, there exist a > 0, R > 0 such that
(1.7) a1(x, y), a2(x, y) ≥ a if x ≤ −R;
4) it is effective at +∞, that is, there exist a > 0, R > 0 such that
(1.8) a1(x, y), a2(x, y) ≥ a if x ≥ R.
We introduce the following notation. For an integer k ≥ 0, let
|Dkϕ| =( ∑k1+k2=k
(∂k1x ∂k2
y ϕ)2)1/2
, |Dϕ| = |D1ϕ|.
Let Lp = Lp(Σ), Wkp = W k
p (Σ), Hk = Hk(Σ), H1
0 = H10 (Σ), x+ = max(x, 0), R+ =
(0,+∞), R− = (−∞, 0), Σ± = R± × (0, L), Π±T = (0, T ) × Σ±, Lp,± = Lp(Σ±),
Hk± = Hk(Σ±).For a measurable non-negative on R function ψ(x) �≡ const, let
Lψ(x)2 = {ϕ(x, y) : ϕψ1/2(x) ∈ L2}
with a natural norm. In particularly important cases, we use the special notation
Lα2 = L
(1+x+)2α
2 ∀ α ∈ R, Lα,exp2 = L1+e2αx
2 ∀ α > 0.
Let for an integer k ≥ 0
Hk,ψ(x) = {ϕ : |Djϕ| ∈ Lψ(x)2 , j = 0, . . . , k}
with a natural norm,
Hk,α = Hk,(1+x+)2α ∀ α ∈ R, Hk,α,exp = Hk,1+e2αx ∀ α > 0.
Restrictions of these spaces on Σ± are denoted by lower indices “+” and “-”:
Lψ(x)2,+ , L
ψ(x)2,− , H
k,ψ(x)+ , H
k,ψ(x)− etc., H
1,ψ(x)0 = {ϕ ∈ H1,ψ(x) : ϕ|∂Σ = 0}.
We say that ψ(x) is an admissible weight function if ψ is an infinitely smoothpositive function on R such that |ψ(j)(x)| ≤ c(j)ψ(x) for each natural j and allx ∈ R. Note that such a function has not more than exponential growth and notmore than exponential decrease at ±∞. It was shown in [9] that ψs(x) for anys ∈ R is also an admissible weight function.
As an important example of such functions, we introduce for α ≥ 0 specialinfinitely smooth functions ρα(x) in the following way: ρα(x) > 1, 0 < ρ′α(x) ≤c(α)ρα(x), |ρ(j)α (x)| ≤ c(α, j)ρ′α(x) for each natural j ≥ 2 and all x ∈ R, ρ′′α(x) > 0for x ≤ −1, ρ0(x) < 2, ρ′′0(x) < 0 for x ≥ 1, ρα(x) = (1+ x)2α for α > 0 and x ≥ 1.It is easy to see that such functions exist and, moreover, for α ≥ 0
Lρα(x)2 = Lα
2 , Hk,ρα(x) = Hk,α.
Note that both ρα and ρ′α are admissible weight functions.

140 A.V. FAMINSKII
We construct solutions to the considered problem in spaces Xk,ψ(x)(ΠT ),k = 0 or 1, for admissible non-decreasing weight functions ψ(x) ≥ 1 ∀x ∈ R,consisting of functions u(t, x, y) such that
(1.9) u ∈ Cw([0, T ];Hk,ψ(x)), |Dk+1u| ∈ L2(0, T ;L
ψ′(x)2 )
(the symbol Cw denotes the space of weakly continuous mappings),(1.10)
λ(|Dk+1u|;T ) = supx0∈R
∫ T
0
∫ x0+1
x0
∫ L
0
|Dk+1u|2 dydxdt <∞, u∣∣y=0
= u∣∣y=L
= 0
(let Xψ(x)(ΠT ) = X0,ψ(x)(ΠT )). Restrictions of these spaces on Π±T are denoted by
Xk,ψ(x)(Π±T ) respectively.
In particularly important cases, we use the special notation
Xk,α(ΠT ) = Xk,ρα(x)(ΠT ), Xα(ΠT ) = X0,α(ΠT )
and for α > 0
Xk,α,exp(ΠT ) = Xk,1+e2αx
(ΠT )
(with similar notation for restrictions on Π±T ). It is easy to see that Xk,0(ΠT )
coincides with a space of functions u ∈ Cw([0, T ];Hk) for which (1.10) holds,
Xk,α(ΠT ), α > 0, — with a space of functions u ∈ Cw([0, T ];Hk,α) for which
(1.10) holds and, in addition, |Dk+1u| ∈ L2(0, T ;Lα−1/22,+ ), Xk,α,exp(ΠT ) — with a
space of functions u ∈ Cw([0, T ];Hk,α,exp) for which (1.10) holds and, in addition,
|Dk+1u| ∈ L2(0, T ;Lα,exp2,+ ).
Now we can formulate results of the paper concerning existence and uniquenessof weak solutions.
Theorem 1.1. Let assumptions (1.4) and (1.5) be satisfied. Assume also that
u0 ∈ Lψ(x)2 , f ∈ L1(0, T ;L
ψ(x)2 ), for a certain T > 0 and an admissible weight
function ψ(x) ≥ 1 ∀x ∈ R such that ψ′(x) is also an admissible weight function.Then there exists a weak solution to problem (1.1)–(1.3), u ∈ Xψ(x)(ΠT ). If, inaddition,
1) assumption (1.6) holds, then this solution u ∈ Cw([0, T ];Lψ(x)2 )∩
L2(0, T ;H1,ψ(x)) and is unique in this space;
2) assumption (1.7) holds, then u ∈ Cw([0, T ];Lψ(x)2 ) ∩ L2(0, T ;H
1,ψ′(x)+ ) ∩
L2(0, T ;H1−) and is unique in this space if ψ(x) ≥ ρ1(x) ∀x ∈ R, ψ′(x) ≥
ρ1/2(x) ∀x ≥ 0;
3) assumption (1.8) holds, then u ∈ L2(0, T ;H1,ψ(x)+ ).
Theorem 1.2. Let assumption (1.4) be satisfied, a1, a2 ∈ W 2∞, a0 ∈ W 1
∞,a2 y(x, 0) ≤ 0, a2 y(x, L) ≥ 0 ∀x ∈ R. Assume also that u0 ∈ H1,ψ(x),
f ∈ L1(0, T ;H1,ψ(x)) for a certain T > 0 and an admissible weight function
ψ(x) ≥ 1 ∀x ∈ R such that ψ′(x) is also an admissible weight function, u0|y=0 =u0|y=L = 0, f |y=0 = f |y=L = 0 ∀x ∈ R and ∀t ∈ (0, T ). Then there exists a weak
solution to problem (1.1)–(1.3), u ∈ X1,ψ(x)(ΠT ), and it is unique in this space ifψ(x) ≥ ρ1/2(x) ∀x ∈ R. If, in addition,
1) assumption (1.6) holds, then this solution u ∈ Cw([0, T ];H1,ψ(x))∩
L2(0, T ;H2,ψ(x));

ZAKHAROV–KUZNETSOV EQUATION 141
2) assumption (1.7) holds, then u ∈ Cw([0, T ];H1,ψ(x)) ∩ L2(0, T ;H
2,ψ′(x)+ )∩
L2(0, T ;H2−);
3) assumption (1.8) holds, then u ∈ X1,ψ(x)(ΠT ) ∩ L2(0, T ;H2,ψ(x)+ ) and is
unique in this space.
Remark 1.3. The weight functions ψ(x) ≡ ρα(x), α ≥ 0, and ψ(x)≡1 + e2αx,α > 0, satisfy the hypotheses of Theorems 1.1 and 1.2. In particular, if (1.4)–(1.6) hold, u0 ∈ L2, f ∈ L1(0, T ;L2), there exists a unique solution in thespace Cw([0, T ];L2) ∩ L2(0, T ;H
10 ). If (1.4), (1.5) and (1.7) hold, u0 ∈ Lα,exp
2 ,f ∈ L1(0, T ;L
α,exp2 ) for α > 0, there exists a unique solution in the space Cw([0, T ];
Lα,exp2 ) ∩ L2(0, T ;H
1,α,exp0 ).
Next, pass to the decay results which can be considered as corollaries of The-orems 1.1 and 1.2. Here we always assume that f ≡ 0. Then it is easy to see thatone can construct solutions lying in the same spaces as in Theorems 1.1 and 1.2 forany T > 0 even if they do not belong to the classes of uniqueness.
Corollary 1.4. Let assumptions (1.4) and (1.5) be satisfied, u0 ∈ L2, f ≡ 0.Assume also that
(1.11) a2(x, y) ≥ β2(x) ≥ 0, a0(x, y) ≥ β0(x) ∀(x, y) ∈ Σ
for certain measurable functions β2, β0 and, moreover,
(1.12)π2β2(x)
L2+ β0(x) ≥ β = const > 0 ∀x ∈ R.
Then there exists a weak solution to problem (1.1)–(1.3), u ∈ X0(ΠT ) ∀T > 0, suchthat
(1.13) ‖u(t, ·, ·)‖L2≤ e−βt‖u0‖L2
∀t ≥ 0.
Remark 1.5. If additional assumptions on the data provide uniquenessaccording to Theorems 1.1 and 1.2 then, of course, any solution from the classof uniqueness possesses property (1.13) (under (1.11), (1.12)). A similar remark isapplicable also in the following results.
Inequalities (1.11) and (1.12) mean that either dissipation or absorption mustbe effective at every point to ensure exponential decay. Compare this result withthe one-dimensional case. The Korteweg–de Vries (KdV) equation itself
ut + uxxx + uux = 0
as well as the ZK equation possesses the conservation law in L2, so without addi-tional damping there is no decay of solutions to the initial value problem.
Consider the Korteweg–de Vries–Burgers equation
ut + uxxx + uux − a1uxx = 0, a1 = const > 0.
It is proved in [1] that for u0 ∈ L2(R)∩L1(R) a corresponding solution to the initialvalue problem satisfies an inequality
‖u(t, ·)‖L2(R) ≤ c(1 + t)−1/4 ∀t ≥ 0
and this result is sharp, so here dissipation provides only power decay.Of course, if one considers a KdV type equation with absorption damping on
the whole real line
ut + uxxx + uux + a0u = 0, a0 = const > 0,

142 A.V. FAMINSKII
then it is easy to see that a corresponding solution to the initial value problemdecays exponentially:
‖u(t, ·)‖L2(R) ≤ e−a0t‖u0‖L2(R) ∀t ≥ 0.
It was shown in [3] that exponential decay remains even in the case of a localizedabsorption, that is, for the initial value problem for an equation
ut + uxxx + uux + a0(x)u = 0
if a0(x) ≥ 0 ∀x ∈ R, a0(x) ≥ β > 0 for |x| ≥ R, then
‖u(t, ·)‖L2(R) ≤ ce−c0t ∀t ≥ 0,
where positive constants c and c0 are uniform for initial data u0 from any boundedset in L2(R).
A similar result for equation (1.1) if dissipation is effective at both infinitiesis obtained in this paper for small solutions and its proof is based on ideas from[15,16].
Corollary 1.6. Let assumptions (1.4)–(1.6) be satisfied and, in addition,a0(x, y) ≥ 0 ∀(x, y) ∈ Σ. Assume also that u0 ∈ L2, f ≡ 0. Then there existε0 > 0 and β > 0 such that if ‖u0‖L2
≤ ε0 the corresponding unique weak solutionu(t, x, y) to problem (1.1)–(1.3) from the space Cw([0, T ];L2)∩L2(0, T ;H
1) ∀T > 0satisfies an inequality
(1.14) ‖u(t, ·, ·)‖L2≤√2e−βt‖u0‖L2
∀t ≥ 0.
In the spaces with exponential weights at +∞, a similar result is establishedwithout any additional damping but with certain restrictions on the width of thestrip in the case b > 0.
Corollary 1.7. Let assumptions (1.4), (1.5) be satisfied and, in addition,a0(x, y) ≥ 0 ∀(x, y) ∈ Σ. Then let L0 = +∞ if b ≤ 0, and if b > 0 there existsL0 > 0 such that in both cases for any L ∈ (0, L0) there exist α0 > 0, ε0 > 0 andβ > 0 such that if u0 ∈ Lα,exp
2 for α ∈ (0, α0], ‖u0‖L2≤ ε0, f ≡ 0, there exists a
weak solution u(t, x, y) to problem (1.1)–(1.3) from the space Xα,exp(ΠT ) ∀T > 0satisfying an inequality
(1.15) ‖eαxu(t, ·, ·)‖L2≤ e−αβt‖eαxu0‖L2
∀t ≥ 0.
If parabolic damping is effective at −∞, this result can be improved.
Corollary 1.8. Let assumptions (1.4), (1.5), (1.7) be satisfied and, in addi-tion, a0(x, y) ≥ 0 ∀(x, y) ∈ Σ. Then let L0 = +∞ if b ≤ 0 and if b > 0 thereexists L0 > 0 such that in both cases for any L ∈ (0, L0) there exist α0 > 0,ε0 > 0 and β > 0 such that if u0 ∈ Lα,exp
2 for α ∈ (0, α0], ‖u0‖L2≤ ε0, f ≡ 0 the
corresponding unique weak solution u(t, x, y) to problem (1.1)–(1.3) from the spaceCw([0, T ];L
α,exp2 ) ∩ L2(0, T ;H
1,α,exp) ∀T > 0 satisfies an inequality
(1.16) ‖(1 + e2αx)1/2u(t, ·, ·)‖L2≤ e−αβt‖(1 + e2αx)1/2u0‖L2
∀t ≥ 0.
In order to present a result when parabolic damping is effective at +∞, weintroduce the following auxiliary functions. For each α ≥ 0 and ε > 0, define aninfinitely smooth increasing on R function κα(x) as follows: κα(x) = e2x whenx ≤ −1, κα(x) = (1 + x)2α for α > 0 and κ0(x) = 2 − (1 + x)−1/2 when x ≥ 0,κ′α(x) > 0 when x ∈ (−1, 0). Note that both κα and κ′
α are admissible weightfunctions, and κ′
α(x) ≤ c(α)κα(x) for all x ∈ R.

ZAKHAROV–KUZNETSOV EQUATION 143
Corollary 1.9. Let assumptions (1.4), (1.5), (1.8) be satisfied and, in addi-tion, a0(x, y) ≥ 0 ∀(x, y) ∈ Σ. Then let L0 = +∞ if b ≤ 0, and if b > 0 thereexists L0 > 0 such that in both cases for any L ∈ (0, L0) there exist α0 > 0, ε0 > 0and β > 0 such that if u0 ∈ L2, ‖u0‖L2
≤ ε0, f ≡ 0 there exists a weak solutionu(t, x, y) to problem (1.1)–(1.3) satisfying u ∈ X0(ΠT ), |Du| ∈ L2(Π
+T ) ∀T > 0 and
for any α ∈ (0, α0]
(1.17) ‖κ1/20 (αx)u(t, ·, ·)‖L2
≤ e−αβt‖κ1/20 (αx)u0‖L2
∀t ≥ 0.
Further, let η(x) denotes a cut-off function, namely, η is an infinitely smoothnon-decreasing function on R such that η(x) = 0 when x ≤ 0, η(x) = 1 when x ≥ 1,η(x) + η(1− x) ≡ 1.
We omit limits of integration in integrals over the whole strip Σ.
The following interpolating inequality generalizing the one from [12] for weightedSobolev spaces is crucial for the study.
Lemma 1.10. Let ψ1(x), ψ2(x) be two admissible weight functions such thatψ1(x) ≤ c0ψ2(x) ∀x ∈ R for some constant c0 > 0. Let k be a natural number,m ∈ [0, k) be an integer, q ∈ [2,+∞] if k − m ≥ 2 and q ∈ [2,+∞) in other
cases. For the case q = +∞, assume also thatψ2(x1)
ψ1(x1)≤ c0
ψ2(x2)
ψ1(x2)if |x1− x2| ≤ 1.
Then there exists a constant c > 0 such that for every function ϕ(x, y) satisfying
|Dkϕ|ψ1/21 (x) ∈ L2, ϕψ
1/22 (x) ∈ L2, the following inequality holds:
(1.18)∥∥|Dmϕ|ψs1(x)ψ
1/2−s2 (x)
∥∥Lq≤ c
∥∥|Dkϕ|ψ1/21 (x)
∥∥2sL2
∥∥ϕψ1/22 (x)
∥∥1−2s
L2+c
∥∥ϕψ1/22 (x)
∥∥L2
,
where s =m+ 1
2k− 1
kq. If ϕ
∣∣y=0
= ϕ∣∣y=L
= 0 and either k = 1,m = 0 or k = 2,
m = 0, q < +∞ or k = 2, m = 1, q = 2 then the constant c in (1.18) is uniformwith respect to L.
Proof. If one considers the whole plane R2 instead of the strip Σ, thenthe given inequality is a special case for a more general interpolating inequality,estimated in [5] for an arbitrary number of variables. The proof in this case issimilar. Therefore, we reproduce it here only for the three aforementioned cases(either k = 1,m = 0 or k = 2, m = 0, q < +∞ or k = 2, m = 1, q = 2), inparticular, to make it clear why the constant c is independent on L in these caseswhen ϕ
∣∣y=0
= ϕ∣∣y=L
= 0.
Without loss of generality, assume that ϕ is a smooth decaying function at∞. First following [12], estimate one auxiliary inequality (which itself is also usedlater): for p ∈ [1, 2), p∗ = 2p/(2− p) uniformly with respect to L(1.19)
‖ϕ‖Lp∗ ≤c(p)
L
∥∥|Dϕ|+|ϕ|∥∥Lp
, ‖ϕ‖Lp∗ ≤ c(p)∥∥|Dϕ|
∥∥Lp
if ϕ∣∣y=0
= ϕ∣∣y=L
= 0.
For p = 1 (then p∗ = 2), this inequality follows from the inequality∫∫ϕ2 dxdy ≤
∫ L
0
supx∈R
|ϕ| dy∫R
supy∈(0,L)
|ϕ| dx

144 A.V. FAMINSKII
and obvious interpolating one-dimensional inequalities
supx∈R
|ψ| ≤∫R
|ψ′| dx, supy∈(0,L)
|ψ| ≤ c
L
∫ L
0
(|ψ′|+ |ψ|) dy,
supy∈(0,L)
|ψ| ≤∫ L
0
|ψ′| dy if ψ(0) = 0 or ψ(L) = 0.
If p ∈ (1, 2) let ϕ ≡ |ϕ|p∗/2 signϕ, then in the general case the first inequality of(1.19) for p = 1 yields that
‖ϕ‖p∗/2
Lp∗= ‖ϕ‖L2
≤ c
L
∥∥|Dϕ|+ |ϕ|∥∥L1≤ c(p)
L
∥∥|ϕ|p∗/2−1(|Dϕ|+ |ϕ|)∥∥L1
≤ c(p)
L‖|ϕ|p∗/2−1‖Lp/(p−1)
∥∥|Dϕ|+ |ϕ|∥∥Lp
=c(p)
L‖ϕ‖p
∗/2−1Lp∗
∥∥|Dϕ|+ |ϕ|∥∥Lp
,
whence in this case (1.19) follows. If ϕ|y=0 = ϕ|y=L = 0, then one has to repeatthis argument with the use of the second inequality of (1.19) for p = 1.
Now we can prove estimate (1.18) for k = 1, m = 0, q > 2 (for q = 2 it is obvi-ous). In fact, in the general case choosing p ∈ (1, 2) such that q < p∗ and applyingthe first Holder inequality and then the first inequality of (1.19) to the function
Φ ≡ |ϕ|2/pψ1/21 ψ
1/p∗
2 signϕ (note that |DΦ| ≤ c(q)(|Dϕ| + |ϕ|
)ψ1/21 |ϕ|2/p∗
ψ1/p∗
2 )and finally again the Holder inequality, we derive that
‖ϕψ1/2−1/q1 ψ
1/q2 ‖Lq
=∥∥|Φ|q−2
(|ϕ|ψ1/2
2
)q−2(q−2)/p∥∥1/q
L1
≤ ‖Φ‖1−2/qLp∗
‖ϕψ1/22 ‖1−2(q−2)/(pq)
L2≤ c(q)
L1−2/q
∥∥|DΦ|+ |Φ|∥∥1−2/q
Lp‖ϕψ
1/22 ‖1−2(q−2)/(pq)
L2
≤ c1(q)
L1−2/q
∥∥(|Dϕ|+ |ϕ|)ψ1/21 |ϕ|2/p∗
ψ1/p∗
2
∥∥1−2/q
Lp‖ϕψ
1/22 ‖1−2(q−2)/(pq)
L2
≤ c1(q)
L1−2/q
∥∥(|Dϕ|+ |ϕ|)ψ1/21
∥∥1−2/q
L2‖ϕψ
1/22 ‖2/qL2
.
If ϕ|y=0 = ϕ|y=L = 0, one has to repeat this argument with the use of the secondinequality of (1.19).
If k = 2, m = 1, q = 2, then integration by parts yields an equality∫∫(ϕ2
x + ϕ2y)ψ
1/21 ψ
1/22 dxdy = −
∫∫(ϕxx + ϕyy)ψ
1/21 · ϕψ
1/22 dxdy
−∫∫
ϕϕx(ψ1/21 ψ
1/22 )′ dxdy +
∫R
(ϕϕyψ
1/21 ψ
1/22
) ∣∣∣y=L
y=0dx,
which in the case ϕ|y=0 = ϕ|y=L = 0 provides (1.18) with the constant c indepen-dent on L, while in the general case one has to use the one-dimensional interpolatinginequality
supy∈(0,L)
|ψ| ≤ c[(∫ L
0
(ψ′)2 dy)1/4(∫ L
0
ψ2 dy)1/4
+1
L1/2
(∫ L
0
ψ2 dy)1/2]
.
Combining the already obtained inequalities (1.18) in the cases k = 1, m = 0and k = 2, m = 1, q = 2, obviously provides this inequality also in the case k = 2,m = 0, q < +∞, since
|ϕ|qψq/4−1/21 ψ
q/4+1/22 = |ϕ|q(ψ1/2
1 ψ1/22 )q/2−1ψ2.
�

ZAKHAROV–KUZNETSOV EQUATION 145
For the decay results, we need Steklov’s inequality in the following form: forψ ∈ H1
0 (0, L),
(1.20)
∫ L
0
ψ2(y) dy ≤ L2
π2
∫ L
0
(ψ′(y)
)2dy.
The paper is organized as follows. Auxiliary linear problems are considered inSection 2. Section 3 is devoted to the existence of weak solutions to the originalproblem. Results on uniqueness are proved in Section 4. Decay of solutions isstudied in Section 5.
2. Auxiliary linear problems
Consider a linear equation
(2.1) ut + bux + uxxx + uxyy + δ(uxxxx + uyyyy) = f(t, x, y)
for a certain constant δ > 0. In addition to the initial condition (1.2), set boundaryconditions
(2.2) u∣∣y=0
= u∣∣y=L
= uyy
∣∣y=0
= uyy
∣∣y=L
= 0, (t, x) ∈ (0, T )× R,
and consider the corresponding initial-boundary value problem in ΠT .We introduce certain additional function spaces. Let S(Σ) be a space of infin-
itely smooth functions ϕ(x, y) in Σ = R× [0, L] such that (1+ |x|)n|∂kx∂
lyϕ(x, y)| ≤
c(n, k, l) for any non-negative integer n, k, l, and all (x, y) ∈ Σ. Let Sexp(Σ±) denote
a space of infinitely smooth functions ϕ(x, y) in Σ± such that en|x||∂kx∂
lyϕ(x, y)| ≤
c(n, k, l) for any non-negative integer n, k, l and all (x, y) ∈ Σ±.
Lemma 2.1. Let u0 ∈ S(Σ) ∩ Sexp(Σ+), f ∈ C∞([0, T ]; S(Σ) ∩ Sexp(Σ+)
)and
for any integer j ≥ 0
∂2jy u0
∣∣y=0
= ∂2jy u0
∣∣y=L
= 0, ∂2jy f
∣∣y=0
= ∂2jy f
∣∣y=L
= 0.
Then there exists a unique solution to problem (2.1), (1.2), (2.2) u ∈ C∞([0, T ];
S(Σ) ∩ Sexp(Σ+)).
Proof. For any natural l, let ψl(y) ≡√
2L sin πl
L y, λl =(πlL
)2. Then a solution
to the considered problem can be written as follows:
u(t, x, y) =1
2π
∫R
+∞∑l=1
eiξxψl(y)u(t, ξ, l) dξ,
where
u(t, ξ, l) ≡ u0(ξ, l)e(i(ξ3+ξλl−bξ)−δ(ξ4+λ2
l ))t
+
∫ t
0
f(τ, ξ, l)e(i(ξ3+ξλl−bξ)−δ(ξ4+λ2
l ))(t−τ) dτ,
u0(ξ, l) ≡∫∫
e−iξxψl(y)u0(x, y) dxdy, f(t, ξ, l) ≡∫∫
e−iξxψl(y)f(t, x, y) dxdy,
and, obviously, u ∈ C∞([0, T ], S(Σ)).

146 A.V. FAMINSKII
Next, let v ≡ ∂kx∂
lyu for some integer k, l ≥ 0. Then the function v satisfies an
equation of type (2.1), where f is replaced by ∂kx∂
lyf . Let m ≥ 4. Multiplying this
equation by 2xmv and integrating over Σ+, we obtain an inequality
d
dt
∫∫Σ+
xmv2 dxdy + 2δ
∫∫Σ+
xm(v2xx + v2yy) dxdy
− 4δm(m− 1)
∫∫Σ+
xm−2vvxx dxdy ≤ m(m− 1)(m− 2)
∫∫Σ+
xm−3v2 dxdy
+ 2
∫∫Σ+
xm∂kx∂
lyfv dxdy + bm
∫∫Σ+
xm−1v2 dxdy.
Here∣∣∣4δm(m− 1)
∫∫Σ+
xm−2vvxx dxdy∣∣∣ ≤ 2δ
∫∫Σ+
x2mv2xx dxdy
+ 2δm2(m− 1)2∫∫
Σ+
xm−4v2 dxdy
and since m(m− 1) ≤ 6(m− 2)(m− 3) for m ≥ 4
d
dt
∫∫Σ+
xmv2 dxdy ≤ 12δm(m− 1)(m− 2)(m− 3)
∫∫Σ+
xm−4v2 dxdy
+m(m− 1)(m− 2)
∫∫Σ+
xm−3v2 dxdy + 2
∫∫Σ+
xm∂kx∂
lyfv dxdy
+ |b|m∫∫
Σ+
xm−1v2 dxdy.
Let α > 0, n ≥ 4. For any m ∈ [4, n], multiplying the corresponding inequalityby αm/(m!) and summing by m, we obtain that for
zn(t) ≡∫∫
Σ+
n∑m=0
(αx)m
m!v2(t, x, y) dxdy
inequalities
z′n(t) ≤ czn(t) + c, zn(0) ≤ c
hold uniformly with respect to n, whence it follows that
supt∈[0,T ]
∫∫Σ+
eαxv2 dxdy <∞.
Thus, u ∈ C∞([0, T ], Sexp(Σ+)). �
Next, consider generalized solutions. Let u0 ∈(S(Σ)∩Sexp(Σ−)
)′, f ∈
(C∞([0, T ];
S(Σ) ∩ Sexp(Σ−)))′.
Definition 2.2. A function u ∈(C∞([0, T ]; S(Σ) ∩ Sexp(Σ−))
)′is called a
generalized solution to problem (2.1), (1.2), (2.2), if for any function φ ∈ C∞([0, T ];
S(Σ)∩Sexp(Σ−)), such that φ|t=T = 0 and φ|y=0 = φ|y=L = φyy|y=0 = φyy|y=L = 0,
the following equality holds:
(2.3) 〈u, φt + bφx + φxxx + φxyy − δφxxxx − δφyyyy〉+ 〈f, φ〉+ 〈u0, φ|t=0〉 = 0.
Lemma 2.3. A generalized solution to problem (2.1), (1.2), (2.2) is unique.

ZAKHAROV–KUZNETSOV EQUATION 147
Proof. The proof is implemented by a standard Holmgren’s argument on thebasis of Lemma 2.1. �
Lemma 2.4. Let u0 ∈ Lψ(x)2 , f ≡ f0 + f1 x + f2 y, where f0 ∈ L1(0, T ;L
ψ(x)2 ),
f1, f2 ∈ L2(0, T ;Lψ(x)2 ), for a certain admissible weight function ψ(x). Then there
exists a (unique) generalized solution to problem (2.1), (1.2), (2.2), u ∈ C([0, T ];
Lψ(x)2 ) ∩ L2(0, T ;H
2,ψ(x)). Moreover, u|y=0 = u|y=L = 0, for any t0 ∈ (0, T ],
‖u‖C([0,t0];L
ψ(x)2 )
+ ‖u‖L2(0,t0;H2,ψ(x))(2.4)
≤ c(T, δ)[‖u0‖Lψ(x)
2+ ‖f0‖L1(0,t0;L
ψ(x)2 )
+ ‖f1‖L2(0,t0;Lψ(x)2 )
+ ‖f2‖L2(0,t0;Lψ(x)2 )
]and for a.e. t ∈ (0, T )
(2.5)d
dt
∫∫u2ψ dxdy − b
∫∫u2ψ′ dxdy +
∫∫(3u2
x + u2y)ψ
′ dxdy
−∫∫
u2ψ′′′ dxdy + 2δ
∫∫(u2
xx + u2yy)ψ dxdy − 4δ
∫∫u2xψ
′′ dxdy
+ δ
∫∫u2ψ(4) dxdy = 2
∫∫f0uψ dxdy − 2
∫∫ [f1(uψ)x + f2uyψ
]dxdy.
Proof. It is sufficient to consider smooth solutions from Lemma 2.1 due tothe linearity of the problem. Multiplying (2.1) by 2u(t, x, y)ψ(x) and integratingover Σ, we obtain equality (2.5), whence (2.4) is immediate. �
Lemma 2.5. Let the hypothesis of Lemma 2.4 be satisfied for ψ(x) ≥ 1 ∀x ∈ R.Then for any test function φ ∈ C∞(
[0, T ]; S(Σ) ∩ Sexp(Σ−)), such that φ|t=T = 0,
φ|y=0 = φ|y=L = 0, and for the corresponding generalized solution u ∈ C([0, T ];L2)∩L2(0, T ;H
2 ∩H10 ), the following equality holds:
∫∫∫ΠT
u(φt + bφx + φxxx + φxyy) dxdydt− δ
∫∫∫ΠT
(uxxφxx + uyyφyy) dxdydt
(2.6)
+
∫∫∫ΠT
(f0φ− f1φx − f2φy) dxdydt+
∫∫u0φ
∣∣t=0
dxdy = 0.
Proof. Approximate the function φ by functions satisfying the hypothesis ofDefinition 2.2, write the corresponding equality (2.3), integrate by parts and thenpass to the limit. �
Lemma 2.6. Let u0 ∈ H1,ψ(x), f ≡ f0 + f1, where f0 ∈ L1(0, T ;H1,ψ(x)), f1 ∈
L2(0, T ;Lψ(x)2 ), for a certain admissible weight function ψ(x), u0|y=0 = u0|y=L = 0,
f0|y=0 = f0|y=L = 0. Then there exists a (unique) generalized solution to problem
(2.1), (1.2), (2.2) u ∈ C([0, T ];H1,ψ(x)0 ) ∩ L2(0, T ;H
3,ψ(x)). Moreover, uyy|y=0 =uyy|y=L = 0, for any t0 ∈ (0, T ],
(2.7) ‖u‖C([0,t0];H1,ψ(x)) + ‖u‖L2(0,t0;H3,ψ(x))
≤ c(T, δ)[‖u0‖H1,ψ(x) + ‖f0‖L1(0,t0;H1,ψ(x)) + ‖f1‖L2(0,t0;L
ψ(x)2 )
]and for a.e. t ∈ (0, T )
(2.8)d
dt
∫∫(u2
x + u2y)ψ dxdy − b
∫∫(u2
x + u2y)ψ
′ dxdy

148 A.V. FAMINSKII
+
∫∫(3u2
xx + 4u2xy + u2
yy)ψ′ dxdy + 2δ
∫∫(u2
xxx + u2xxy + u2
xyy + u2yyy)ψ dxdy
− 4δ
∫∫(u2
xx + u2xy)ψ
′′ dxdy + δ
∫∫(u2
x + u2y)ψ
(4) dxdy −∫∫
(u2x + u2
y)ψ′′′ dxdy
= 2
∫∫(f0 xux + f0 yuy)ψ dxdy − 2
∫∫f1[(uxψ)x + uyyψ] dxdy.
Proof. In the smooth case multiplying (2.1) by −2((ux(t, x, y)ψ(x)
)x+
uyy(t, x, y)ψ(x))and integrating over Σ, one obtains equality (2.8), whence (2.7)
follows. �Now consider a linear initial-boundary value problem for the equation
(2.9) ut+bux+uxxx+uxyy− (a1(x, y)ux)x− (a2(x, y)uy)y+a0(x, y)u = f(t, x, y),
where the functions aj at least satisfy (1.4), (1.5), with initial and boundary condi-
tions (1.2), (1.3). Let u0 ∈(S(Σ)∩Sexp(Σ−)
)′, f ∈
(C∞([0, T ]; S(Σ)∩Sexp(Σ−))
)′.
Definition 2.7. A function u ∈(C∞([0, T ]; S(Σ) ∩ Sexp(Σ−))
)′is called a
generalized solution to problem (2.9), (1.2), (1.3), if a1ux, a2uy, a0u ∈(C∞([0, T ];
S(Σ)∩Sexp(Σ−)))′
and for any function φ ∈ C∞([0, T ]; S(Σ)∩Sexp(Σ−)
), such that
φ|t=T = 0 and φ|y=0 = φ|y=L = 0, the following equality holds:
〈u, φt + bφx + φxxx + φxyy〉 − 〈a1ux, φx〉 − 〈a2uy, φy〉(2.10)
− 〈a0u, φ〉+ 〈f, φ〉+ 〈u0, φ|t=0〉 = 0.
Lemma 2.8. Let a0 = a1 = a2 ≡ 0, u0 ∈ L2, f ≡ f0 + f1 x + f2 y, wherefj ∈ L2(ΠT ) ∀j. Assume that there exists a generalized solution to problem (2.9),(1.2), (1.3) u ∈ L∞(0, T ;L2)∩L2(0, T ;H
10 ). Then u ∈ C([0, T ];L2) (after probable
change on a set of zero measure) and for any t ∈ [0, T ]
(2.11)
∫∫u2(t, x, y) dxdy =
∫∫u20 dxdy + 2
∫ t
0
∫∫(f0u− f1ux − f2uy) dxdydτ.
Proof. Write equality (2.10) as:∫∫∫ΠT
[u(φt + bφx + φxxx + φxyy) + (f0φ− f1φx − f2φy)
]dxdydt(2.12)
+
∫∫u0φ
∣∣t=0
dxdy = 0.
In particular, (2.12) provides that ut ∈ L2(0, T ;H−2) and, thus, after probable
change on a set of zero measure u ∈ Cw([0, T ];L2).Substitute in (2.12) the variable x by the variable ξ and for any x ∈ R choose
the test function φ in the form
φ(t, ξ, y) ≡ 1
hλ
(x− ξ
h
)ω(t, y),
where h > 0, λ is the averaging kernel (for example, λ(x) = ce1/(x2−1) if |x| < 1,
λ(x) = 0 if |x| ≥ 1, where the positive constant c is chosen such that∫ 1
−1λ(x) dx =
1), ω ∈ C∞([0, T ]× [0, L]), ω|t=0 = ω|t=T = 0, ω|y=0 = ω|y=L = 0. Then if we set
uh(t, x, y) ≡ 1
h
∫R
λ
(x− ξ
h
)u(t, ξ, y) dξ

ZAKHAROV–KUZNETSOV EQUATION 149
(and similarly fhj ), we obtain an equality
(2.13)
∫∫(0,T )×(0,L)
(uhωt− buhxω−uh
xxxω−uhxωyy+fh
0 ω+fh1 xω−fh
2 ωy) dydt = 0.
Note that ∂jxu
h ∈ L∞(0, T ;L2) ∩ L2(0, T ;H10 ) ∀j and uh ∈ Cw([0, T ];L2).
Let φ ∈ C∞0 (ΠT ). For any x ∈ R, choose in equality (2.13) ω(t, y) ≡ φ(t, x, y)
and integrate over R. Then∫∫∫ΠT
[uh(φt + bφx + φxxx + φxyy) + fh
0 φ− fh1 φx − fh
2 φy
]dxdydt = 0,
that is, in D′(ΠT ), we have an equality
(2.14) uht + buh
x + uhxxx + uh
xyy = fh0 + fh
1 x + fh2 y.
Note that uhxyy, f
h2 y ∈ L2(0, T ;H
−1), fh0 , f
h1 x ∈ L2(0, T ;L2), therefore, equality
(2.14) yields that uht ∈ L2(0, T ;H
−1). Since uh ∈ L2(0, T ;H10 ), we have that
uh ∈ C([0, T ];L2) and
‖uh(t, ·, ·)‖2L2= ‖uh
0‖2L2+ 2
∫ t
0
〈uhτ , u
h〉 dτ
= ‖uh0‖2L2
+ 2
∫ t
0
∫∫(fh
0 uh − fh
1 uhx − fh
2 uhy − buh
xuh − uh
xxxuh + uh
xyuhy | dxdydτ,
where the integrals of the three last terms are obviously equal to zero.Therefore, passing to the limit when h → 0 we obtain equality (2.11). In
particular, (2.11) yields that ‖u(t, ·, ·)‖L2∈ C[0, T ] and taking into account weak
continuity, we find that u ∈ C([0, T ];L2). �Lemma 2.9. A generalized solution to problem (2.9), (1.2), (1.3) is unique in
the space L∞(0, T ;L2) ∩ L2(0, T ;H10 ) if assumptions (1.4), (1.5) hold.
Proof. Consider a solution to problem (2.9), (1.2), (1.3) for u0 ≡ 0, f ≡ 0as a solution to a problem of the same type but where a0 = a1 = a2 ≡ 0, u0 ≡ 0,f ≡ f0 + f1 x + f2 y, f0 ≡ −a0u, f1 ≡ a1ux, f2 ≡ a2uy. Then by virtue of (2.11)∫∫
u2(t, x, y) dxdy + 2
∫ t
0
∫∫(a1u
2x + a2u
2y + a0u
2) dxdydτ = 0
and, therefore, u ≡ 0. �
Lemma 2.10. Let assumptions (1.4)–(1.6) be satisfied, u0 ∈ Lψ(x)2 , f ≡ f0 +
f1 x+f2 y, where f0 ∈ L1(0, T ;Lψ(x)2 ), f1, f2 ∈ L2(0, T ;L
ψ(x)2 ) for a certain admissi-
ble weight function ψ(x) ≥ 1 ∀x ∈ R such that ψ′(x) > 0 ∀x ∈ R. Then there exists
a (unique) generalized solution to problem (2.9), (1.2), (1.3) u ∈ Cw([0, T ];Lψ(x)2 )∩
L2(0, T ;H1,ψ(x)0 ) and for any t ∈ [0, T ]∫∫u2ψ(x) dxdy +
∫ t
0
∫∫|Du|2ψ′ dxdydτ(2.15)
+ 2
∫ t
0
∫∫(a1u
2x + a2u
2y)ψ dxdydτ ≤
∫∫u20ψ dxdy
+ 2
∫ t
0
∫∫ [f0uψ − f1(uψ)x − f2uyψ
]dxdydτ + c
∫ t
0
∫∫u2ψ dxdydτ,
where the constant c depends on b, a0 and ψ.

150 A.V. FAMINSKII
Proof. For any h ∈ (0, 1] and v ∈ Y (ΠT ) = C([0, T ];Lψ(x)2 )∩L2(0, T ;H
2,ψ(x)),consider an initial-boundary value problem for an equation
(2.16) ut + bux + uxxx + uxyy + h(uxxxx + uyyyy) = f + (a1vx)x + (a2vy)y − a0v
with initial and boundary conditions (1.2), (2.2). Lemma 2.4 provides that thereexists a solution to this problem uh,v ∈ Y (ΠT ). By virtue of (2.4) and (1.18) forv, v ∈ Y (ΠT ),
‖uh,v − uh,v‖Y (Πt0) ≤ c
[‖a0(v − v)‖
L1(0,t0;Lψ(x)2 )
+ ‖a1(v − v)x‖L2(0,t0;Lψ(x)2 )
+‖a2(v − v)y‖L2(0,t0;Lψ(x)2 )
]≤ c1t
1/40 ‖v − v‖1/2
C([0,t0];Lψ(x)2 )
‖v − v‖1/2L2(0,t0;H2,ψ(x))
,
whence by the standard argument succeeds existence of a solution uh ∈ Y (ΠT ) toan initial-boundary value problem for an equation
(2.17) ut + bux + uxxx + uxyy + h(uxxxx + uyyyy)− (a1ux)x − (a2uy)y + a0u = f
with initial and boundary conditions (1.2), (2.2).Application of equality (2.5) (where δ = h, f0 is substituted by f0 − a0u,
f1 – by f1 + a1ux, f2 – by f2 + a2uy) provides an equality
(2.18)d
dt
∫∫u2hψ(x) dxdy +
∫∫(3u2
hx + u2h y)ψ
′ dxdy
+2h
∫∫(u2
hxx+u2h yy)ψ dxdy =
∫∫u2h(bψ
′+ψ′′′−hψ(4)) dxdy+4h
∫∫u2h xψ
′′ dxdy
+2
∫∫ [(f0uhψ − f1(uhψ)x − f2uh y)−
(a1uh x(uhψ)x + a2u
2h yψ + a0u
2hψ
)]dxdy.
Since for a certain constant a > 0, any (x, y) ∈ Σ and j = 1 or 2,
(2.19) ψ′(x) + 2aj(x, y)ψ(x) ≥ aψ(x),
equality (2.18) yields that∫∫u2h(t, x, y)ψ(x) dxdy + a
∫ t
0
∫∫|Duh|2ψ dxdydτ(2.20)
+ h
∫ t
0
∫∫(u2
hxx + u2h yy)ψ dxdydτ ≤
∫∫u20ψ dxdy + c
∫ t
0
∫∫u2hψ dxdydτ
+ c
∫ t
0
∫∫ [|f0uh|+ |f1uhx|+ |f1uh|+ |f2uh y|+ |uhuhx|
]ψ dxdydτ.
Moreover, equality (2.6) yields that
∫∫∫ΠT
uh(φt + bφx + φxxx + φxyy) dxdydt
(2.21)
− h
∫∫∫ΠT
(uhxxφxx + uh yyφyy) dxdydt+
∫∫∫ΠT
(f0φ− f1φx − f2φy) dxdydt
−∫∫∫
ΠT
(a0uhφ+ a1uhxφx + a2uh yφy) dxdydt+
∫∫u0φ
∣∣t=0
dxdy = 0
for any test function φ from Definition 2.7. With the use of (2.20) passing to thelimit when h→ +0 in (2.18) and (2.21), we finish the proof. �

ZAKHAROV–KUZNETSOV EQUATION 151
Lemma 2.11. Let assumptions (1.4), (1.5) and (1.7) be satisfied, u0 ∈ L12, f ≡
f0 + f1 x + f2 y, where f0 ∈ L1(0, T ;L12), f1, f2 ∈ L2(0, T ;L
3/22 ). Then there exists
a (unique) generalized solution to problem (2.9), (1.2), (1.3) u ∈ Cw([0, T ];L12) ∩
L2(0, T ;H1,1/20 ) and for any t ∈ [0, T ],
(2.22)
∫∫u2ρ1(x) dxdy + c0
∫ t
0
∫∫|Du|2ρ1/2 dxdydτ ≤
∫∫u20ρ1 dxdy
+ c
∫ t
0
∫∫u2ρ1 dxdydτ + 2
∫ t
0
∫∫[f0uρ1 − f1(uρ1)x − f2uyρ1] dxdydτ,
where the positive constants c0 and c depend on b and properties of aj.
Proof. As in the proof of Lemma 2.10, consider for h ∈ (0, 1] initial-boundaryvalue problems (2.17), (1.2), (2.2). Lemma 2.4 provides that solutions to theseproblems exist, uh ∈ Cw([0, T ];L
12) ∩ L2(0, T ;H
2,1 ∩ H10 ). Similarly , one obtains
equality (2.18) for ψ ≡ ρ1. Here∫∫(3u2
hx + u2h y)ρ
′1 dxdy + 2
∫∫(a1u
2hxρ1 + a2u
2h yρ1) dxdy
≥ 2c0
∫∫|Duh|2ρ1/2 dxdy,∣∣∣∫∫ a1uhxuhρ
′1 dxdy
∣∣∣ ≤ ε
∫∫u2h xρ1/2 dxdy + c(ε)
∫∫u2hρ1 dxdy,
where ε > 0 can be chosen arbitrarily small,∣∣∣∫∫ f1uh xρ1 dxdy∣∣∣ ≤ ε
∫∫u2hxρ1/2 dxdy + c(ε)
∫∫f21 ρ3/2 dxdy,∫∫
f2uh yρ1 dxdy is estimated in a similar way. The end of the proof is the same asfor Lemma 2.10. �
3. Existence of weak solutions
Let assumptions (1.4), (1.5) be satisfied, u0 ∈ L2, f ∈ L1(0, T ;L2).
Definition 3.1. A function u ∈ L∞(0, T ;L2) ∩ L2
(0, T ;H1((−r, r)× (0, L))
)∀r > 0 is called a weak solution to problem (1.1)–(1.3) if u|y=0 = u|y=L = 0 and
for any function φ ∈ C∞(ΠT ), such that ϕ|t=T = 0, ϕ(t, x, y) = 0 when |x| ≥ r forsome r > 0 and ϕ|y=0 = ϕ|y=L = 0, the following equality holds:∫∫∫
ΠT
[u(φt + bφx + φxxx + φxyy +
1
2u2φx − a1uxφx − a2uyφy(3.1)
− a0uφ+ fφ
]dxdydτ +
∫∫Σ
u0φ∣∣t=0
dxdy = 0.
Remark 3.2. If a weak solution to problem (1.1)–(1.3) u ∈ L∞(0, T ;H1), thenequality (3.1) also holds for test functions φ from Definition 2.7.
Besides the original problem, consider an auxiliary problem for a “regularized”equation
(3.2) ut+bux+uxxx+uxyy+δ(uxxxx+uyyyy)+(g(u)
)x−(a1ux)x−(a2uy)y+a0u = f
with initial condition (1.2) and boundary conditions (2.2) for δ > 0 and a certainfunction g. The notion of a weak solution is introduced similarly to Definition 3.1,

152 A.V. FAMINSKII
but here the solution is assumed to belong to the space L∞(0, T ;L2)∩L2(0, T ;H2).
It is also assumed that g(u(t, x, y)) ∈ L1
((0, T ) × (−r, r) × (0, L)
)∀r > 0, in the
corresponding integral equality the term u2φx/2 is substituted by g(u)φx and theterms −δ(uxxφxx + uyyφyy) are supplemented in the first integral. Note that ifg ≡ 0, then a weak solution to problem (3.2), (1.2), (2.2) satisfies equality (2.6)where f0 ≡ f − a0u, f1 ≡ a1ux, f2 ≡ a2uy.
Lemma 3.3. Let δ > 0, g ∈ C1(R), g(0) = 0, |g′(u)| ≤ c ∀u ∈ R and assumption
(1.5) holds. Let u0 ∈ Lψ(x)2 , f ∈ L1(0, T ;L
ψ(x)2 ), for a certain admissible weight
function ψ(x) ≥ 1 ∀x ∈ R. Then problem (3.2), (1.2), (2.2) has a unique weak
solution u ∈ C([0, T ];Lψ(x)2 ) ∩ L2(0, T ;H
2,ψ(x)).
Proof. We apply the contraction principle. For t0 ∈ (0, T ], define a mapping
Λ on a set Y (Πt0) = C([0, t0];Lψ(x)2 ) ∩ L2(0, t0;H
2,ψ(x) ∩H10 ) as follows: u = Λv ∈
Y (Πt0) is a generalized solution to a linear problem
(3.3) ut+bux+uxxx+uxyy+δ(uxxxx+uyyyy) = f−(g(v)
)x+(a1vx)x+(a2vy)y−a0v
in Πt0 with initial and boundary conditions (1.2), (2.2).Note that |g(v)| ≤ c|v| and, therefore,
‖g(v)‖L2(0,t0;L
ψ(x)2 )
≤ c‖v‖L2(0,t0;L
ψ(x)2 )
<∞.
According to Lemma 2.4 the mapping Λ exists, and according to Lemma 2.5 thecorresponding analogue of equality (2.6) can be written. Moreover, for functionsv, v ∈ Y (Πt0 , )
‖g(v)− g(v)‖L2(0,t0;L
ψ(x)2 )
≤ c‖v − v‖L2(0,t0;L
ψ(x)2 )
≤ ct1/20 ‖v − v‖
C([0,t0];Lψ(x)2 )
,
‖a1(vx − vx)‖L2(0,t0;Lψ(x)2 )
≤ c[∫ t0
0
(∥∥|D2(v − v)|∥∥L
ψ(x)2
‖v − v‖L
ψ(x)2
+ ‖v − v‖2L
ψ(x)2
)dt]1/2
≤ c1t1/40 ‖v − v‖Y (Πt0
)
and similarly for a2(vy − vy). As a result, according to inequality (2.4)
‖Λv − Λv‖Y (Πt0) ≤ c(T, δ)t
1/40 ‖v − v‖Y (Πt0
).
Since the constant in the right side of this inequality is uniform with respect tou0 and f , one can construct the solution on the whole time segment [0, T ] by thestandard argument. �
Now we pass to the results of existence in Theorem 1.1.
Proof of Existence Part of Theorem 1.1. For h ∈ (0, 1], consider a setof initial-boundary value problems in ΠT
(3.4)ut+ bux+uxxx+uxyy +h(uxxxx+uyyyy)+ (gh(u))x− (a1ux)x− (a2uy)y +a0u = f
with boundary conditions (1.2), (2.2), where
(3.5) gh(u) ≡∫ u
0
[θη(2− h|θ|) + 2 sign θ
hη(h|θ| − 1)
]dθ.

ZAKHAROV–KUZNETSOV EQUATION 153
Note that gh(u) = u2/2 if |u| ≤ 1/h, |g′h(u)| ≤ 2/h ∀u ∈ R and |g′h(u)| ≤ 2|u|uniformly with respect to h.
According to Lemma 3.3, there exists a unique solution to this problem uh ∈C([0, T ];L
ψ(x)2 ) ∩ L2(0, T ;H
2,ψ(x)).Next, establish appropriate estimates for functions uh uniform with respect
to h.Write down the analogue of equality (2.18) for ψ ≡ 1, then (we omit the index
h in intermediate steps for simplicity):
d
dt
∫∫u2 dxdy + 2h
∫∫(u2
xx + u2yy) dxdy + 2
∫∫g′(u)uux dxdy(3.6)
+ 2
∫∫(a1u
2x + a2u
2y + a0u
2) dxdy = 2
∫∫fu dxdy.
Since
(3.7) g′(u)uux =(∫ u
0
g′(θ)θ dθ)x≡
(g′(u)u
)∗x,
where here and in the sequel g∗(u) ≡∫ u
0g(θ) dθ denotes the primitive for g such
that g(0) = 0, we have that∫∫
g′(u)uxu dxdy = 0 and equality (3.6) yields that
(3.8) ‖uh‖C([0,T ];L2) + h1/2‖uh‖L2(0,T ;H2) ≤ c
uniformly with respect to h (and also uniformly with respect to L).Next, similarly to (2.18) with the use of (3.7), we derive that
d
dt
∫∫u2ψ dxdy +
∫∫(3u2
x + u2y)ψ
′ dxdy + 2h
∫∫(u2
xx + u2yy)ψ dxdy
(3.9)
− 2
∫∫(g′(u)u)
∗ψ′ dxdy + 2
∫∫(a1u
2x + a2u
2y)ψ dxdy + 4h
∫∫u2xψ
′′ dxdy
=
∫∫u2(bψ′ + ψ′′′ − hψ(4)) dxdy − 2
∫∫a1uxuψ
′ dxdy + 2
∫∫fuψ dxdy.
Applying the interpolating inequality (1.18) for k = 1, m = 0, ψ1 = ψ2 ≡ ψ′, weobtain ∣∣∣∫∫ (g′(u)u)∗ψ′ dxdy
∣∣∣ ≤ ∫∫|u|3ψ′ dxdy(3.10)
≤(∫∫
u2 dxdy)1/2(∫∫
|u|4(ψ′)2 dxdy)1/2
≤ c(∫∫
u2 dxdy)1/2
×[(∫∫
|Du|2ψ′dxdy)1/2(∫∫
u2ψ′ dxdy)1/2
+
∫∫u2ψ′ dxdy
](note that here the constant c is also uniform with respect to L). Since the norm ofthe functions uh in the space L2 is already estimated in (3.8), it follows from (3.9),(3.10) that
(3.11) ‖uh‖C([0,T ];Lψ(x)2 )
+∥∥|Duh|
∥∥L2(0,T ;L
ψ′(x)2 )
+ h1/2‖uh‖L2(0,T ;H2,ψ(x)) ≤ c.
Finally, write down the analogue of (3.9), where ψ(x) is substituted byρ0(x− x0) for any x0 ∈ R. Then it easily follows that (see (1.10))
(3.12) λ(|Duh|;T ) ≤ c.

154 A.V. FAMINSKII
From equation (3.4) itself, (3.8) and the well-known embedding L1 ⊂ H−2, itfollows that uniformly with respect to h
(3.13) ‖uh t‖L1(0,T ;H−3) ≤ c.
Estimates (3.11)–(3.13) by the standard argument provide existence of a weaksolution to problem (1.1)–(1.3) u ∈ Xψ(x)(ΠT ) (see, for example, [2]) as a limit offunctions uh when h→ +0.
If the additional assumption (1.6) holds, then inequalities (2.19) and (3.9) yieldthat uniformly with respect to h
(3.14)∥∥|Duh|
∥∥L2(0,T ;L
ψ(x)2 )
≤ c
and, therefore, u ∈ L2(0, T ;H1,ψ(x)).
If the additional assumption (1.7) holds, then for j = 1 or 2
(3.15) ψ′(x) + 2aj(x, y)ψ(x) ≥ const > 0 ∀ x ≤ 0
and (3.9) provides that
(3.16)∥∥|Duh|
∥∥L2(0,T ;L2,−)
≤ c;
therefore, u ∈ L2(0, T ;H1−).
Finally, if the additional assumption (1.8) holds, then inequality (2.19) is validfor x ≥ 0 so (3.9) provides that
(3.17)∥∥|Duh|
∥∥L2(0,T ;L
ψ(x)2,+ )
≤ c
and, therefore, u ∈ L2(0, T ;H1,ψ(x)+ ). �
Remark 3.4. Lemma 2.8 provides that under the hypothesis of Theorem 1.1with additional assumption (1.6) and if f ∈ L2(ΠT ), a weak solution to problem(1.1)–(1.3) lies in the space C([0, T ];L2) (apply Lemma 2.8 for f0 ≡ f − a0u,f1 ≡ a1ux − u2/2, f2 ≡ a2uy).
We now proceed to solutions in spaces H1,ψ(x) and first establish a lemmaanalogous to Lemma 3.3.
Lemma 3.5. Let δ > 0, g ∈ C2(R), g(0) = 0 and |g′(u)|, |g′′(u)| ≤ c ∀u ∈R, a1, a2 ∈ W 1
∞, a0 ∈ L∞. Let u0 ∈ H1,ψ(x), f ∈ L1(0, T ;H1,ψ(x)), for a
certain admissible weight function ψ(x) ≥ 1 ∀x ∈ R, u0|y=0 = u0|y=L ≡ 0,f |y=0 = f |y=L ≡ 0. Then problem (3.1), (1.2), (2.2) has a unique weak solution
u ∈ C([0, T ];H1,ψ(x)0 ) ∩ L2(0, T ;H
3,ψ(x)), uyy|y=0 = uyy|y=L = 0.
Proof. Introduce for t0 ∈ (0, T ] a space Y1(Πt0) = C([0, t0];H1,ψ(x)0 )∩
L2(0, t0;H3,ψ(x)) and define a mapping Λ on it in the same way as in the proof of
Lemma 3.3 (with the substitution of Y by Y1). Since |g′(v)vx| ≤ c|vx|,
‖g′(v)vx‖L2(0,t0;Lψ(x)2 )
≤ ct1/20 ‖v‖C([0,t0];H1,ψ(x)).
In addition,
‖a1vxx‖L2(0,t0;Lψ(x)2 )
≤ ct1/40
∥∥|D3v|∥∥1/2L2(0,t0;L
ψ(x)2 )
∥∥|Dv|∥∥1/2
C([0,t0];Lψ(x)2 )

ZAKHAROV–KUZNETSOV EQUATION 155
(similarly for a2vyy), and according to Lemma 2.6 (where f1 ≡ −g′(v)vx+(a1vx)x+(a2vy)y − a0v) such a mapping Λ exists. Moreover, by virtue of (2.7),
(3.18) ‖Λv‖Y1(Πt0) ≤ c
(‖u0‖H1,ψ(x) + ‖f‖L1(0,t0;H1,ψ(x)) + t
1/40 ‖v‖Y1(Πt0
)
).
Next, since |g′(v)vx− g′(v)vx| ≤ c|vx| · |v− v|+ c|vx− vx|, inequality (2.7) providesthat
‖Λv − Λv‖Y1(Πt0) ≤ c
∥∥g′(v)vx − g′(v)vx∥∥L2(0,t0;L
ψ(x)2 )
(3.19)
+ c∥∥(a1(vx − vx)
)x+
(a2(vy − vy)
)y+ a0(v − v)
∥∥L2(0,t0;L
ψ(x)2 )
≤ c[
supt∈[0,t0]
||vx||Lψ(x)2
∥∥ sup(x,y)∈Σ
|v − v|∥∥L2(0,t0)
+ t1/40 ‖v − v‖Y1(Πt0
)
]≤ c1
[sup
t∈[0,t0]
‖v‖H1,ψ(x) · supt∈[0,t0]
‖v − v‖1/2L2· t1/40 · ‖v − v‖1/2L2(0,t0;H2)
+ t1/40 ‖v − v‖Y1(Πt0
)
]≤ c2t
1/40
(1 + sup
t∈[0,t0]
‖v‖H1,ψ(x)
)‖v − v‖Y1(Πt0
),
where we used inequality (1.18) for q = +∞, ψ1 = ψ2 ≡ 1.In order to finish the proof, we establish the following a priori estimate: if
u ∈ Y1(ΠT ′) is a solution to the considered problem for some T ′ ∈ (0, T ], then
(3.20) ‖u‖C([0,T ′];H1,ψ(x)) ≤ c(‖u0‖H1,ψ(x) , ‖f‖L1(0,T ′;H1,ψ(x))).
The corresponding analogues of equalities (2.5) and (2.8) yield that
(3.21)d
dt
∫∫(u2 + |Du|2)ψ dxdy + 2δ
∫∫|D3u|2ψ dxdy
≤ 2
∫∫(fu+ fxux + fyuy)ψ dxdy + c
∫∫(u2 + |Du|2 + |D2u|2)ψ dxdy.
Since ∫∫|D2u|2ψ dxdy ≤ ε
∫∫|D3u|2ψ dxdy + c(ε)
∫∫|Du|2ψ dxdy,
where ε > 0 can be chosen arbitrarily small, inequality (3.21) provides the estimate(3.20). �
Proof of Existence Part of Theorem 1.2. As in the proof of The-orem 1.1, consider the set of “regularized” problems (3.4), (1.2), (2.2) and fortheir corresponding solutions uh ∈ C([0, T ];H1,ψ(x)) ∩ L2(0, T ;H
3,ψ(x)) (note that|g′′h(u)| ≤ c ∀u ∈ R) establish appropriate estimates uniform with respect to h.

156 A.V. FAMINSKII
Multiply (3.4) by−2[(uh x(t, x, y)ψ(x))x+uh yy(t, x, y)ψ(x)+gh
(uh(t, x, y)
)ψ(x)
]and integrate over Σ then (index h is again omitted):
d
dt
∫∫ (u2x + u2
y − 2g∗(u))ψ dxdy − b
∫∫ (u2x + u2
y − 2g∗(u))ψ′ dxdy
(3.22)
+
∫∫(3u2
xx + 4u2xy + u2
yy)ψ′ dxdy −
∫∫(u2
x + u2y)ψ
′′′ dxdy
+ 2h
∫∫(u2
xxx + u2xxy + u2
xyy + u2yyy)ψ dxdy − 4h
∫∫(u2
xx + u2xy)ψ
′′ dxdy
+ h
∫∫(u2
x + u2y)ψ
(4) dxdy − 2
∫∫g′(u)u2
xψ′ dxdy + 2
∫∫g(u)(uxx + uyy)ψ
′ dxdy
+ 2h
∫∫g′(u)(uxuxxx + uyuyyy)ψ dxdy + 2h
∫∫g(u)uxxxψ
′ dxdy
+ 2
∫∫(g′(u)g(u))
∗ψ′ dxdy + 2
∫∫[a1u
2xx + (a1 + a2)u
2xy + a2u
2yy]ψ dxdy
−∫∫ (
(a1xx + a1 yy)u2x + (a2xx + a2 yy)u
2y
)ψ dxdy +
∫R
(a2 yu
2yψ
) ∣∣y=L
y=0dx
−∫∫
(a1 xu2y + a2 xu
2y − 2a1 yuxuy)ψ
′ dxdy −∫∫
a1(u2x + u2
y)ψ′′ dxdy
− 2
∫∫g′(u)(a1u
2x + a2u
2y)ψ dxdy − 2
∫∫a1g(u)uxψ
′ dxdy
+ 2
∫∫a0(u
2x + u2
y)ψ dxdy + 2
∫∫(a0xux + a0 yuy)uψ dxdy
− 2
∫∫a0g(u)ψ dxdy = 2
∫∫ (fxux + fyuy − fg(u)
)ψ dxdy.
Recall that g∗(u) =∫ u
0g(θ) dθ, so |g∗(u)| ≤ |u|3/3 and similarly to (3.10)∣∣∣∫∫ g∗(u)ψ dxdy
∣∣∣ ≤ c(∫∫
|Du|2ψ dxdy)1/2
+ c,
where the already obtained estimated (3.11) on ‖uh‖C([0,T ];Lψ(x)2 )
is also used. Next,
with the use of (3.11) and (1.18) first for k = 1, we derive that∣∣∣∫∫ g′(u)u2xψ
′ dxdy∣∣∣ ≤ 2
(∫∫u2 dxdy
)1/2(∫∫u4x(ψ
′)2 dxdy)1/2
≤ c[(∫∫
|Dux|2ψ′ dxdy)1/2(
u2xψ dxdy
)1/2
+
∫∫u2xψ dxdy
],∣∣∣∫∫ g(u)(uxx + uyy)ψ
′ dxdy∣∣∣ ≤ c
(∫∫(u2
xx + u2yy)ψ
′ dxdy)1/2(∫∫
u4ψ2 dxdy)1/2
≤ c1
(∫∫(u2
xx + u2yy)ψ
′ dxdy)1/2[(∫∫
|Du|2ψ dxdy)1/2
+ 1]
and then with the use of (1.18) for k = 3, we obtain that
h∣∣∣∫∫ g′(u)(uxuxxx + uyuyyy)ψ dxdy
∣∣∣ ≤ ch(∫∫
|D3u|2ψ dxdy)1/2
×(∫∫
u4ψ2 dxdy)1/4(∫∫
|Du|4ψ2 dxdy)1/4
≤ c1h(∫∫
|D3u|2ψ dxdy)5/6
+ c1.

ZAKHAROV–KUZNETSOV EQUATION 157
Next, we apply interpolating inequality (1.19) for p = 1 and find that∫∫a1|g′(u)|u2
xψ dxdy ≤ 2(∫∫
a21u4xψ
2 dxdy)1/2(∫∫
u2 dxdy)1/2
≤ c(∫∫ ∣∣D(a1u
2xψ)
∣∣ dxdy)≤ ε
∫∫a1(u
2xx + u2
x + u2xy)ψ dxdy + c(ε)
∫∫(|a1x|+ |a1 y|)u2
xψ dxdy,
where ε > 0 can be chosen arbitrarily small. Of course,∫∫
a2|g′(u)|u2yψ dxdy is
estimated in the same way.Therefore, it follows from (3.22) that uniformly with respect to h
(3.23) ‖uh‖C([0,T ];H1,ψ(x)) +∥∥|D2uh|
∥∥L2(0,T ;L
ψ′(x)2 )
+ h1/2‖uh‖L2(0,T ;H3,ψ(x)) ≤ c.
As in the proof of Theorem 1.1, one can repeat this argument where ψ(x) is sub-stituted by ρ0(x− x0) and similarly to (3.12) obtain an estimate
(3.24) λ(|D2uh|;T ) ≤ c.
Estimates (3.23), (3.24) and (3.13) provide existence of a weak solution to theconsidered problem u ∈ X1,ψ(x)(ΠT ).
Additional properties of this solution under assumptions (1.6), (1.7) or (1.8)are established in the same way (see (3.14)–(3.17)) as in Theorem 1.1. �
4. Uniqueness
We consider four lemmas which provide uniqueness results of Theorems 1.1and 1.2. Note that a similar argument can be applied to establish continuousdependence of solutions on the initial data u0 and the function f .
Lemma 4.1. Let assumptions (1.4) and (1.5) hold, then a weak solution toproblem (1.1)–(1.3) is unique in the space X1,1/2(ΠT ).
Proof. Let u and u be two solutions to the same problem in the consideredspace, v ≡ u− u. Then v is a weak solution to a linear problem
vt + bvx + vxxx + vxyy − (a1vx)x − (a2vy)y + a0v =1
2
(u2 − u2
)x,(4.1)
v∣∣t=0
= 0, v∣∣x=0
= v∣∣x=L
= 0.(4.2)
Let ψ(x) ≡ κ1/2(x). Then v ∈ L∞(0, T ;H1,ψ(x)). Note also that u2, u2 ∈L∞(0, T ;L1
2) since
(4.3)
∫∫u4ρ1(x) dxdy ≤ c
(∫∫ (|Du|2 + u2
)ρ1/2(x) dxdy
)2
<∞.
For r ≥ 1, let ψr(x) ≡ ψ(x)η(r+1−x)+(2+r)η(x−r), then |D2v| ∈ L2(0, T ;Lψr(x)2 )
and it follows from (4.1) that vtψ1/2r ∈ L2(0, T ;H
−1).

158 A.V. FAMINSKII
Multiply (4.1) by 2v(t, x, y)ψr(x), integrate over Πt and then pass to the limitwhen r → +∞:
∫∫v2ψ dxdy +
∫ t
0
∫∫(3v2x + v2y)ψ
′ dxdydτ −∫ t
0
∫∫v2(ψ′′′ + bψ′) dxdydτ
(4.4)
+ 2
∫ t
0
∫∫(a1v
2x + a2v
2y + a0v
2)ψ dxdydτ + 2
∫ t
0
∫∫a1vvxψ
′ dxdydτ
= 2
∫ t
0
∫∫(uux − uux)vψ dxdydτ.
Here ∣∣∣∫∫ (uux − uux)vψ dxdy∣∣∣ ≤ c
∫∫ (|ux|+ |ux|+ |u|+ |u|
)v2ψ dxdy,
and since ψ(x)/ψ′(x) ≤ c(1 + x+) for all x ∈ R
∫∫ (|ux|+ |u|
)v2ψ dxdy ≤
(2
∫∫(u2
x + u2)ψ
ψ′ dxdy)1/2(∫∫
v4ψ′ψ dxdy)1/2
(4.5)
≤ c(∫∫
(u2x + u2)ρ1/2 dxdy
)1/2[(∫∫|Dv|2ψ′ dxdy
)1/2(∫∫v2ψ dxdy
)1/2
+
∫∫v2ψ dxdy
].
Therefore, inequality (4.4) yields that v ≡ 0. �
Lemma 4.2. Let assumptions (1.4)–(1.6) hold, then a weak solution to problem(1.1)–(1.3) is unique in the space L∞(0, T ;L2) ∩ L2(0, T ;H
1).
Proof. As in the proof of Lemma 4.1 consider the linear problem (4.1), (4.2).Here similarly to (4.3), u2, u2 ∈ L2(ΠT ). Therefore, the hypothesis of Lemma 2.10is satisfied for ψ(x) ≡ ρ0(x) and according to (2.15)
(4.6)
∫∫v2(t, x, y)ρ0 dxdy +
∫ t
0
∫∫ [|Dv|2ρ′0 + 2(a1v
2x + a2v
2y)ρ0
]dxdydτ
≤ c
∫ t
0
∫∫v2ρ0 dxdydτ +
∫ t
0
∫∫(u+ u)v(vρ0)x dxdydτ.
Here∫∫|uvvx|ρ0 dxdy ≤ 2
(∫∫u4 dxdy
)1/4(∫∫v4 dxdy
)1/4(∫∫v2x dxdy
)1/2
≤ c(∫∫
|Du|2 dxdy)1/4(∫∫
u2 dxdx)1/4(∫∫
|Dv|2 dxdy)3/4(∫∫
v2 dxdy)1/4
≤ ε
∫∫|Dv|2 dxdy + c(ε)
∫∫|Du|2 dxdy
∫∫v2 dxdy,
where ε > 0 can be chosen arbitrarily small, and with the use of inequality (2.19)for ψ = ρ0 we derive from (4.6) that v ≡ 0. �
Lemma 4.3. Let assumptions (1.4), (1.5) and (1.7) hold, then a weak solutionto problem (1.1)–(1.3) is unique in the space L∞(0, T ;L1
2) ∩ L2(0, T ;H1,1/2).

ZAKHAROV–KUZNETSOV EQUATION 159
Proof. Here∫ T
0
∫∫u4ρ3/2 dxdydt ≤ c
∫ T
0
∫∫u4ρ1/2ρ1 dxdydt
≤ c1
∫ T
0
[∫∫|Du|2ρ1/2 dxdy
∫∫u2ρ1 dxdy +
(∫∫u2ρ1 dxdy
)2]dt <∞,
and by virtue of Lemma 2.11 for the function v∫∫v2(t, x, y)ρ1 dxdy + c0
∫ t
0
∫∫|Dv|2ρ1/2 dxdydτ(4.7)
≤ c
∫ t
0
∫∫v2ρ1 dxdydτ +
∫ t
0
∫∫(u+ u)v(vρ1)x dxdydτ.
Since∫∫|uvvx|ρ1 dxdy ≤ c
∫∫|u|ρ1/41/2ρ
1/41 · |v|ρ1/41/2ρ
1/41 · |vx|ρ1/21/2 dxdy
≤ c(∫∫
u4ρ1/2ρ1 dxdy)1/4(∫∫
v4ρ1/2ρ1 dxdy)1/4(∫∫
v2xρ1/2 dxdy)1/2
≤ c1
[(∫∫|Du|2ρ1/2 dxdy
)1/4(∫∫u2ρ1 dxdx
)1/4
+(∫∫
u2ρ1 dxdx)1/2]
×[(∫∫
|Dv|2ρ1/2 dxdy)1/4(∫∫
v2ρ1 dxdy)1/4
+(∫∫
v2ρ1 dxdy)1/2]
×(∫∫
v2xρ1/2 dxdy)1/2
≤ ε
∫∫|Dv|2ρ1/2 dxdy
+ c(ε)[∫∫
|Du|2ρ1/2 dxdy + 1] ∫∫
v2ρ1 dxdy,
where ε > 0 can be chosen arbitrarily small, inequality (4.7) yields that v ≡ 0. �
Lemma 4.4. Let assumptions (1.4), (1.5) and (1.8) hold, then a weak solutionto problem (1.1)–(1.3) is unique in the space X1,0(ΠT ) ∩ L2(0, T ;H
2+).
Proof. Repeat the argument of the proof of Lemma 4.1 for the functionψ(x) ≡ κ0(x). Here vtψ
1/2 ∈ L2(0, T ;H−1); therefore, one does not have to intro-
duce the function ψr and can multiply (4.1) directly by 2v(t, x, y)ψ(x). Instead of(4.3), (4.5), we have that u2, u2 ∈ L∞(0, T ;L2) and
(4.8)
∫∫(|ux|+|u|)v2ψ dxdy ≤
(2
∫∫(u2
x + u2) dxdy)1/2(∫∫
v4ψ2 dxdy)1/2
≤ c[(∫∫
|Dv|2ψ dxdy)1/2(∫∫
v2ψ dxdy)1/2
+
∫∫v2ψ dxdy
].
Since for j = 1 or 2
(4.9) κ′0(x) + 2aj(x, y)κ0(x) ≥ cκ0(x) ∀ (x, y) ∈ Σ,
it follows from (4.4) and (4.8) that v ≡ 0. �

160 A.V. FAMINSKII
5. Long-time decay
Proof of Corollary 1.4. Equalities (3.6), (3.7) provide that for the solu-tions uh to problem (3.4), (1.2), (2.2), the following inequality holds:
(5.1)d
dt
∫∫u2h dxdy + 2
∫∫(a1u
2h x + a2u
2h y + a0u
2h) dxdy ≤ 0.
With the use of (1.11), (1.12) and (1.20), we derive that∫∫(a2u
2h y + a0u
2h) dxdy ≥ β
∫∫u2h dxdy
and it follows from (5.1) that
‖uh(t, ·, ·)‖L2≤ e−βt‖u0‖L2
∀t ≥ 0.
Passing to the limit when h→ +0, we obtain (1.13). �
Proof of Corollaries 1.6 – 1.9. First of all, note that equality (5.1) pro-vides that
(5.2) ‖uh(t, ·, ·)‖L2≤ ‖u0‖L2
∀t ≥ 0.
Next, consider equality (3.9) for f ≡ 0 and ψ(x) ≡ ρ0(αx) for Corollary 1.6,ψ(x) ≡ e2αx for Corollary 1.7, ψ(x) ≡ 1+e2αx for Corollary 1.8, and ψ(x) ≡ κ0(αx)for Corollary 1.9, where α ∈ (0, 1]. Continuing inequality (3.10), we find with theuse of (5.2) that uniformly with respect to L and α∣∣∣∫∫ (g′h(uh)uh)
∗ψ′ dxdy
∣∣∣ ≤ 1
2
∫∫|Duh|2ψ′ dxdy
+ cα(‖u0‖L2
+ ‖u0‖2L2
) ∫∫u2hψ dxdy.
Inequalities (2.19), (4.9) and (1.20) yield that for a certain constant c0 > 0 inde-pendent of L and α∫∫ (1
2u2h yψ
′ + 2a2u2h yψ
)dxdy ≥ c0α
L2
∫∫u2hψ dxdy.
Therefore, it follows from (3.9) that uniformly with respect to L and α
d
dt
∫∫u2hψ dxdy +
c0α
L2
∫∫u2hψ dxdy
≤ cα(b+ 2α+ ‖u0‖L2
+ ‖u0‖2L2
) ∫∫u2hψ dxdy
and choosing L0 =√
c0/(2cb) if b > 0, α0 and ε0 satisfying 4c(2α0+ε0+ε20) ≤ c0L−2,
β = c0αL−2/8, we derive an inequality
(5.3) ‖uh(t, ·, ·)ψ1/2‖L2≤ e−βt‖u0ψ
1/2‖L2∀t ≥ 0,
whence Corollaries 1.6, if b ≤ 0, and 1.7 – 1.9 follow. For Corollary 1.6, if b > 0,note that this case can be reduced to the case b = 0 by the substitution u(t, x, y) =u(t, x+ bt, y). �

ZAKHAROV–KUZNETSOV EQUATION 161
References
[1] C. J. Amick, J. L. Bona, and M. E. Schonbek, Decay of solutions of some nonlinear waveequations, J. Differential Equations 81 (1989), no. 1, 1–49, DOI 10.1016/0022-0396(89)90176-9. MR1012198 (90k:35210)
[2] Evgeniya S. Baykova and Andrei V. Faminskii, On initial-boundary-value problems in a stripfor the generalized two-dimensional Zakharov-Kuznetsov equation, Adv. Differential Equa-tions 18 (2013), no. 7-8, 663–686. MR3086671
[3] Marcelo M. Cavalcanti, Valeria N. Domingos Cavalcanti, Andrei Faminskii, and Fabio Na-tali, Decay of solutions to damped Korteweg-de Vries type equation, Appl. Math. Optim. 65(2012), no. 2, 221–251, DOI 10.1007/s00245-011-9156-7. MR2891222
[4] G.G. Doronin and N.A. Larkin, Stabilization of regular solutions for the Zakharov–Kuznetsov equation posed on bounded rectangles and on a strip, b 25 Sep. 2012, arXiv:1209.5767v1 [math.AP].
[5] A. V. Faminskiı, The Cauchy problem for quasilinear equations of odd order (Russian), Mat.Sb. 180 (1989), no. 9, 1183–1210, 1296; English transl., Math. USSR-Sb. 68 (1991), no. 1,
31–59. MR1017821 (90k:35066)[6] A. V. Faminskiı, The Cauchy problem for the Zakharov-Kuznetsov equation (Russian, with
Russian summary), Differentsial′nye Uravneniya 31 (1995), no. 6, 1070–1081, 1103; Englishtransl., Differential Equations 31 (1995), no. 6, 1002–1012. MR1383936 (97a:35199)
[7] A. V. Faminskiı, On the nonlocal well-posedness of a mixed problem for the Zakharov-Kuznetsov equation (Russian, with Russian summary), Sovrem. Mat. Prilozh. 38 (2006),135–148, DOI 10.1007/s10958-007-0491-9; English transl., J. Math. Sci. (N. Y.) 147 (2007),no. 1, 6524–6537. MR2469478 (2010a:35215)
[8] Andrei V. Faminskii, Well-posed initial-boundary value problems for the Zakharov-Kuznetsovequation, Electron. J. Differential Equations (2008), No. 127, 23. MR2443150 (2009g:35261)
[9] Andrei V. Faminskii, Weak solutions to initial-boundary-value problems for quasilinear evo-lution equations of an odd order, Adv. Differential Equations 17 (2012), no. 5-6, 421–470.MR2951937
[10] Andrei V. Faminskii and Irina Yu. Bashlykova, Weak solutions to one initial-boundary valueproblem with three boundary conditions for quasilinear evolution equations of the third order,Ukr. Mat. Visn. 5 (2008), no. 1, 83–98; English transl., Ukr. Math. Bull. 5 (2008), no. 1, 85–100. MR2492390 (2009m:35054)
[11] A.V. Faminskii and E.S. Baykova, Weak solutions to a mixed problem with two boundary con-ditions for the generalized Zakharov–Kuznetsov equation, Neklassicheskie Uravneniya Mat.Fiz. (A.I.Kozhanov, ed.), Novosibirsk (2007), 298–306 (in Russian).
[12] O. A. Ladyzenskaja, V. A. Solonnikov, and N. N. Ural′ceva, Linear and quasilinear equa-tions of parabolic type (Russian), Translated from the Russian by S. Smith. Translations ofMathematical Monographs, Vol. 23, American Mathematical Society, Providence, R.I., 1968.
MR0241822 (39 #3159b)[13] David Lannes, Felipe Linares, and Jean-Claude Saut, The Cauchy problem for the Euler-
Poisson system and derivation of the Zakharov-Kuznetsov equation, Studies in phase spaceanalysis with applications to PDEs, Progr. Nonlinear Differential Equations Appl., vol. 84,Birkhauser/Springer, New York, 2013, pp. 181–213, DOI 10.1007/978-1-4614-6348-1 10.MR3185896
[14] Nikolai A. Larkin, Exponential decay of the H1-norm for the 2D Zakharov-Kuznetsovequation on a half-strip, J. Math. Anal. Appl. 405 (2013), no. 1, 326–335, DOI10.1016/j.jmaa.2013.04.011. MR3053512
[15] N.A. Larkin, The 2D Zakharov–Kuznetsov–Burgers equation on a strip, 17 Apr. 2014, arXiv:1404.4638v1 [math.AP].
[16] Nikolai A. Larkin and Eduardo Tronco, Regular solutions of the 2D Zakharov-Kuznetsovequation on a half-strip, J. Differential Equations 254 (2013), no. 1, 81–101, DOI10.1016/j.jde.2012.08.023. MR2983044
[17] Felipe Linares and Ademir Pastor, Well-posedness for the two-dimensional modifiedZakharov-Kuznetsov equation, SIAM J. Math. Anal. 41 (2009), no. 4, 1323–1339, DOI10.1137/080739173. MR2540268 (2010k:35419)

162 A.V. FAMINSKII
[18] Felipe Linares, Ademir Pastor, and Jean-Claude Saut, Well-posedness for the ZK equationin a cylinder and on the background of a KdV soliton, Comm. Partial Differential Equations35 (2010), no. 9, 1674–1689, DOI 10.1080/03605302.2010.494195. MR2754059 (2012k:35479)
[19] J.-C. Saut, Sur quelques generalisations de l’equation de Korteweg-de Vries (French), J.Math. Pures Appl. (9) 58 (1979), no. 1, 21–61. MR533234 (82m:35133)
[20] Jean-Claude Saut and Roger Temam, An initial boundary-value problem for the Zakharov-Kuznetsov equation, Adv. Differential Equations 15 (2010), no. 11-12, 1001–1031.
MR2743493 (2012c:35393)[21] Jean-Claude Saut, Roger Temam, and Chuntian Wang, An initial and boundary-value prob-
lem for the Zakharov-Kuznestov equation in a bounded domain, J. Math. Phys. 53 (2012),no. 11, 115612, 29, DOI 10.1063/1.4752102. MR3026557
[22] V.E. Zakharov and E.A. Kuznetsov, Three-dimensional solitons, Zhurnal Eksp. Teoret. Fiz.66 (1974), 594–597. English transl. in Soviet Phys. JETP 39 (1974), 285–288.
Department of Mathematics, Peoples’ Friendship University of Russia, Miklukho–
Maklai Str. 6, Moscow, 117198, Russia
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13184
Analysis of First Order Systemsof Partial Differential Equations
Yan-Long Fang and Dmitri Vassiliev
Abstract. The paper deals with a formally self-adjoint first order lineardifferential operator acting on m-columns of complex-valued half-densities overan n-manifold without boundary. We study the distribution of eigenvalues inthe elliptic setting and the propagator in the hyperbolic setting, deriving two-term asymptotic formulae for both. We then turn our attention to the special
case of a two by two operator in dimension four. We show that the geometricconcepts of Lorentzian metric, Pauli matrices, spinor field, connection coeffi-cients for spinor fields, electromagnetic covector potential, Dirac equation andDirac action arise naturally in the process of our analysis.
1. The playing field
Let L be a formally self-adjoint first order linear differential operator actingon m-columns v = (v1 . . . vm)T of complex-valued half-densities over a connectedn-dimensional manifold M without boundary. Throughout this paper we assumethat m,n ≥ 2 . The coefficients of the operator L are assumed to be infinitelysmooth.
In local coordinates x = (x1, . . . , xn), our operator reads
(1.1) L = Pα(x)∂
∂xα+Q(x),
where Pα(x) and Q(x) are some m×m matrix-functions and summation is carriedout over α = 1, . . . , n. The full symbol of the operator L is the matrix-function
(1.2) L(x, p) := iPα(x) pα +Q(x),
where p = (p1, . . . , pn) is the dual variable (momentum). Note that the traditionin microlocal analysis is to denote momentum by ξ. We choose to denote it by pinstead because in Sections 8 and 9 we will need the letter ξ for the spinor.
The problem with the full symbol is that it is not invariant under changes oflocal coordinates. In order to overcome this problem, we decompose the full symbolinto components homogeneous in momentum, L(x, p) = L1(x, p) + L0(x),
(1.3) L1(x, p) := iPα(x) pα, L0(x) := Q(x),
2010 Mathematics Subject Classification. Primary 35P20; Secondary 35J46, 35R01, 35Q41.Dmitri Vassiliev was supported by EPSRC grant EP/M000079/1.
c©2015 Y.-L. Fang, D. Vassiliev
163

164 YAN-LONG FANG AND DMITRI VASSILIEV
and define the principal and subprincipal symbols as
Lprin(x, p) := L1(x, p),(1.4)
Lsub(x) := L0(x) +i
2(Lprin)xαpα
(x),(1.5)
where the subscripts indicate partial derivatives. It is known that Lprin and Lsub
are invariantly defined matrix-functions on T ∗M and M respectively, see subsec-tion 2.1.3 in [11] for details. As we assume our operator L to be formally self-adjoint, the matrix-functions Lprin and Lsub are Hermitian.
Examination of formulae (1.1)–(1.5) shows that Lprin(x, p) and Lsub(x) uniquelydetermine the first order differential operator L. Thus, the notions of principal sym-bol and subprincipal symbol provide an invariant analytic way of describing a firstorder differential operator.
We say that a formally self-adjoint first order differential operator L is elliptic if
(1.6) detLprin(x, p) �= 0, ∀(x, p) ∈ T ∗M \ {0},
and non-degenerate if
(1.7) Lprin(x, p) �= 0, ∀(x, p) ∈ T ∗M \ {0}.
The ellipticity condition (1.6) is a standard condition in the spectral theory ofdifferential operators, see, for example, [2]. Our non-degeneracy condition (1.7) isless restrictive, and we will see later, in Section 4, that in the special case m = 2and n = 4 this condition describes a hyperbolic operator.
2. Distribution of eigenvalues and the propagator
In this section we assume that the manifold M is compact (and without bound-ary) and that the operator L is elliptic, see (1.6).
Remark 2.1. Ellipticity and the fact that dimension n is greater than or equalto two imply thatm, the number of equations, is even. Indeed, let us fix an arbitrarypoint x ∈ M and consider Lprin(x, p) as a function of momentum p ∈ T ∗
xM . Sincethroughout this paper the operator L is assumed to be formally self-adjoint, thematrix-function Lprin(x, p) is Hermitian, and, hence, detLprin(x, p) is real. Forn ≥ 2, the set T ∗
xM \ {0} is connected, so the ellipticity condition (1.6) impliesthat the polynomial detLprin(x, p) preserves sign on T ∗
xM \ {0}. But our m ×mmatrix-function Lprin(x, p) is linear in p, so detLprin(x,−p) = (−1)m detLprin(x, p).Therefore the sign of detLprin(x, p) can only be preserved if m is even.
Let h(j)(x, p) be the eigenvalues of the principal symbol. We assume that theseare simple for all (x, p) ∈ T ∗M \{0}. We enumerate the eigenvalues of the principalsymbol h(j)(x, p) in increasing order, using a negative index j = −m/2, . . . ,−1 fornegative h(j)(x, p) and a positive index j = 1, . . . ,m/2 for positive h(j)(x, p).
It is known that our differential operator L has a discreet spectrum accumulat-ing to +∞ and to −∞. Let λk and vk = (vk1(x) . . . vkm(x))T be the eigenvaluesand eigenfunctions of the operator L; the particular enumeration of these eigenval-ues (accounting for multiplicities) is irrelevant for our purposes.
We will be studying the following two objects.

ANALYSIS OF FIRST ORDER SYSTEMS 165
Object 1. Our first object of study is the propagator, which is the one-parameter family of operators defined as
U(xn+1) := e−ixn+1L(2.1)
=∑k
e−ixn+1λk vk(x1, . . . , xn)
∫M
[vk(y1, . . . , yn)]∗( · ) dy1 . . . dyn ,
where xn+1 ∈ R is an additional ‘time’ coordinate. The propagator provides asolution to the Cauchy problem
(2.2) w|xn+1=0 = v
for the hyperbolic system
(2.3) (−i∂/∂xn+1 + L)w = 0 .
Namely, it is easy to see that if the column of half-densities v = v(x1, . . . , xn) isinfinitely smooth, then, setting w := U(xn+1) v, we get a ‘time-dependent’ columnof half-densities w(x1, . . . , xn, xn+1) which is also infinitely smooth and which satis-fies the equation (2.3) and the initial condition (2.2). The use of the letter “U” forthe propagator is motivated by the fact that for each xn+1 the operator U(xn+1)is unitary.
Note that the operator −i∂/∂xn+1 + L appearing in the LHS of formula (2.3)is a formally self-adjoint m × m first order differential operator on the (n + 1)-dimensional manifold M × R. Moreover, it is easy to see that this ‘extended’operator −i∂/∂xn+1+L automatically satisfies the non-degeneracy condition fromSection 1.
Object 2. Our second object of study is the counting function
(2.4) N(λ) :=∑
0<λk<λ
1 .
In other words, N(λ) is the number of eigenvalues λk between zero and a positive λ.Here it is natural to ask: why, in defining the counting function (2.4), did
we choose to count all positive eigenvalues up to a given positive λ rather than allnegative eigenvalues up to a given negative λ? Indeed, there is no particular reason.One case reduces to the other by the change of operator L → −L. This issue isknown as spectral asymmetry and is discussed in [1], as well as in Section 10 of [2]and in [4].
Our objectives are as follows.
Objective 1. We aim to construct the propagator (2.1) explicitly in terms ofoscillatory integrals, modulo an integral operator with an infinitely smooth, in thevariables x1, . . . , xn, xn+1, y1, . . . , yn, integral kernel.
Objective 2. We aim to derive a two-term asymptotic expansion for thecounting function (2.4)
(2.5) N(λ) = aλn + bλn−1 + o(λn−1)
as λ→ +∞, where a and b are some real constants. More specifically, our objectiveis to write down explicit formulae for the asymptotic coefficients a and b.

166 YAN-LONG FANG AND DMITRI VASSILIEV
Here one has to have in mind that the two-term asymptotic expansion (2.5)holds only under appropriate assumptions on periodic trajectories, see Theorem 8.4in [2] for details. In order to avoid dealing with the issue of periodic trajectories, inthis paper we understand the asymptotic expansion (2.5) in a regularised fashion.One way of regularising the asymptotic formula (2.5) is to take a convolution with afunction from the Schwartz space S(R); see Theorem 7.2 in [2] for details. Alterna-tively, one can look at the eta function η(s) :=
∑|λk|−s signλk , where summation
is carried out over all nonzero eigenvalues λk and s ∈ C is the independent vari-able. The results of Section 10 of [2] imply that the series converges absolutely forRe s > n and defines a holomorphic function in this half-plane. Moreover, it isknown [1] that the eta function extends meromorphically to the whole s-plane withsimple poles. It is easy to see that the residue of the eta function at the points = n− 1 is 2(n− 1)b, where b is the coefficient from (2.5).
It is well known that the above two objectives are closely related: if one achievesObjective 1, then Objective 2 follows via a Fourier transform in the variable xn+1;see Sections 6 and 7 in [2].
We are now in a position to state our results.
Result 1. We construct the propagator as a sum of m oscillatory integrals(Fourier integral operators)
U(xn+1)modC∞
=∑j
U (j)(xn+1) ,
where the phase function of each oscillatory integral U (j)(xn+1) is associated withthe corresponding Hamiltonian h(j)(x1, . . . , xn, p1, . . . , pn) and summation is per-formed over nonzero integers j from −m/2 to +m/2. The notion of a phase functionassociated with a Hamiltonian is defined in Section 2 of [2] and Section 2.4 of [11].
We will now write down explicitly the principal symbol of the oscillatory integralU (j)(xn+1). The notion of a principal symbol of an oscillatory integral is defined inaccordance with Definition 2.7.12 from [11]. The principal symbol of the oscillatoryintegral U (j)(xn+1) is a complex-valued m×m matrix-function on
M × R× (T ∗M \ {0}).
We denote the arguments of this principal symbol by x1, . . . , xn (local coordinateson M), xn+1 (‘time’ coordinate on R), y1, . . . , yn (local coordinates on M) andq1, . . . , qn (variable dual to y1, . . . , yn).
Further on in this section, we use x, y, p and q as shorthand for x1, . . . , xn,y1, . . . , yn, p1, . . . , pn and q1, . . . , qn, respectively. The additional ‘time’ coordinatexn+1 will always be written separately.
In order to write down the principal symbol of the oscillatory integral U (j)(xn+1),we need to introduce some auxiliary objects first.
Curly brackets will denote the Poisson bracket on matrix-functions {P,R} :=PxαRpα
− PpαRxα and its further generalisation
(2.6) {F,G,H} := FxαGHpα− Fpα
GHxα ,

ANALYSIS OF FIRST ORDER SYSTEMS 167
where the subscripts xα and pα indicate partial derivatives and the repeated indexα indicates summation over α = 1, . . . , n.
Let v(j)(x, p) be the normalised eigenvector of the principal symbol Lprin(x, p)
corresponding to the eigenvalue h(j)(x, p). We define the scalar functionf (j) : T ∗M \ {0} → R in accordance with the formula
f (j) := [v(j)]∗Lsubv(j) − i
2{[v(j)]∗, Lprin − h(j), v(j)} − i[v(j)]∗{v(j), h(j)}.
By (x(j)(xn+1; y, q), p(j)(xn+1; y, q)), we denote the Hamiltonian trajectory orig-inating from the point (y, q), i.e., solution of the system of ordinary differentialequations (the dot denotes differentiation in xn+1)
x(j) = h(j)p (x(j), p(j)), p(j) = −h(j)
x (x(j), p(j))
subject to the initial condition (x(j), p(j))∣∣xn+1=0
= (y, q).
The formula for the principal symbol of the oscillatory integral U (j)(xn+1) isknown [2,9,10] and reads as follows:
[v(j)(x(j)(xn+1; y, q), p(j)(xn+1; y, q))] [v(j)(y, q)]∗(2.7)
× exp
(− i
∫ xn+1
0
f (j)(x(j)(τ ; y, q), p(j)(τ ; y, q)) dτ
).
This principal symbol is positively homogeneous in momentum q of degree zero.Let us now examine the lower order terms of the symbol of the oscillatory
integral U (j)(xn+1). The algorithm described in Section 2 of [2] provides a recursiveprocedure for the calculation of all lower order terms, of any degree of homogeneityin momentum q. However, there are two issues here. Firstly, calculations becomevery complicated. Secondly, describing these lower order terms in an invariant wayis problematic because, as far as the authors are aware, the concept of subprincipalsymbol has never been defined for time-dependent oscillatory integrals (Fourierintegral operators). We thank Yuri Safarov for drawing our attention to the latterissue.
We overcome the problem of invariant description of lower order terms of thesymbol of the oscillatory integral U (j)(xn+1) by restricting our analysis to U (j)(0).It turns out that knowing the properties of the lower order terms of the symbol ofU (j)(0) is sufficient for the derivation of the two-term asymptotic expansion (2.5).And since U (j)(0) is a pseudodifferential operator, one can use here the standardnotion of subprincipal symbol of a pseudodifferential operator, see subsection 2.1.3in [11] for the definition.
The following result was established recently in [2].
Theorem 2.2.
(2.8) tr[U (j)(0)]sub = −i{[v(j)]∗, v(j)}.
It is interesting that the RHS of formula (2.8) admits a geometric interpretation:it can be interpreted as the scalar curvature of a U(1) connection on T ∗M \{0}, seeSection 5 in [2] for details. This connection has to do with gauge transformationsof the normalised eigenvector v(j)(x, p) of the principal symbol Lprin(x, p) corre-
sponding to the eigenvalue h(j)(x, p). Namely, observe that if v(j)(x, p) is an eigen-
vector and φ(j)(x, p) is an arbitrary real-valued function, then eiφ(j)(x,p)v(j)(x, p) is

168 YAN-LONG FANG AND DMITRI VASSILIEV
also an eigenvector, and careful analysis of this gauge transformation leads to theappearance of a curvature term.
Result 2. The formula for the first coefficient of the asymptotic expansion(2.5) reads, [7,8],
(2.9) a = (2π)−n
m/2∑j=1
∫h(j)(x,p)<1
dx dp ,
where dx = dx1 . . . dxn and dp = dp1 . . . dpn .
The formula for the second coefficient of the asymptotic expansion (2.5) wasestablished recently in [2].
Theorem 2.3.
b = −n(2π)−n
m/2∑j=1
∫h(j)(x,p)<1
([v(j)]∗Lsubv
(j) − i
2{[v(j)]∗, Lprin − h(j), v(j)}(2.10)
+i
n− 1h(j){[v(j)]∗, v(j)}
)(x, p) dx dp .
Note that Theorem 2.2 plays an important role in the proof of Theorem 2.3. Theinformation contained in formula (2.7) is, on its own, insufficient for the derivationof the formula for the coefficient b.
Recall also that according to Remark 2.1 the number m is even, so the upperlimit of summation in formulae (2.9) and (2.10) is a natural number.
A bibliographic review of the subject is provided in Section 11 of [2].
3. Two by two operators are special
Suppose that we are dealing with a 2× 2 operator, i.e., suppose that
(3.1) m = 2.
Observe that in this case the determinant of the principal symbol is a quadraticform in the dual variable (momentum) p :
(3.2) detLprin(x, p) = −gαβ(x) pαpβ .
We interpret the real coefficients gαβ(x) = gβα(x), α, β = 1, . . . , n, appearing informula (3.2) as components of a (contravariant) metric tensor. Thus, 2×2 formallyself-adjoint first order linear partial differential operators are special in that theconcept of a metric is encoded within such operators. This opens the way to thegeometric interpretation of analytic results. So further on in this paper, we workunder the assumption (3.1).
4. Dimension four is special
It is easy to see that if n ≥ 5, then our metric defined in accordance withformula (3.2) has the property det gαβ(x) = 0, ∀x ∈M . Hence,
(4.1) n = 4

ANALYSIS OF FIRST ORDER SYSTEMS 169
is the highest dimension in which it makes sense to define the metric as we do.So further on in this section and in the next two sections, we work under theassumption (4.1).
It is natural to ask the question: what is the signature of our metric? Theanswer is given by the following lemma.
Lemma 4.1. Suppose that we have ( 3.1) and ( 4.1) and suppose that our opera-tor L satisfies the non-degeneracy condition ( 1.7). Then our metric tensor definedin accordance with formula ( 3.2) is Lorentzian, i.e., it has three positive eigenvaluesand one negative eigenvalue.
Lemma 4.1 is proved by a straightforward calculation, see Section 2 in [6].
Lemma 4.1 tells us that under the conditions (3.1), (4.1) and (1.7) our operatorL is hyperbolic. This indicates that one could, in principle, perform a comprehen-sive microlocal analysis of the corresponding propagator and, moreover, do thisin a relativistically invariant fashion. Here the relativistic propagator is, looselyspeaking, the Fourier integral operator mapping a 2-column of half-densities v to a2-column of half-densities w which is a solution of the hyperbolic system Lw = v.One would expect the construction of this relativistic propagator to proceed alongthe lines of the construction sketched out in Section 2 and, in more detail, in [2],only without reference to a particular choice of time coordinate.
We are currently a long way from developing relativistic microlocal techniques.However, we are able to perform a gauge-theoretic analysis of 2 × 2 operators indimension four. The results of this gauge-theoretic analysis are presented in thenext two sections and these results reveal additional geometric structures encodedwithin the operator L. We hope that the identification of these geometric structureswill eventually help us develop relativistic microlocal techniques.
5. Gauge-theoretic analysis in 4D
Take an arbitrary matrix-function
(5.1) Q : M → GL(2,C)
and consider the transformation of our 2× 2 differential operator
(5.2) L → Q∗LQ.
We interpret (5.2) as a gauge transformation. Note that in spectral theory it iscustomary to apply unitary transformations rather than general linear transforma-tions. However, in view of Lemma 4.1, we are working in a relativistic (hyperbolic)setting without a specified time coordinate and in this setting restricting our anal-ysis to unitary transformations would be unnatural.
The transformation (5.2) of the differential operator L induces the followingtransformations of its principal and subprincipal symbols:
Lprin → Q∗LprinQ,(5.3)
Lsub → Q∗LsubQ+i
2(Q∗
xα(Lprin)pαQ−Q∗(Lprin)pα
Qxα) .(5.4)
Comparing formulae (5.3) and (5.4) we see that, unlike the principal symbol, thesubprincipal symbol does not transform in a covariant fashion due to the appearance

170 YAN-LONG FANG AND DMITRI VASSILIEV
of terms with the gradient of the matrix-function Q(x). In order to identify thesources of this non-covariance, we observe that any matrix-function (5.1) can bewritten as a product of three terms: a complex matrix-function of determinant one,a positive scalar function and a complex scalar function of modulus one. Hence, weexamine the three gauge-theoretic actions separately.
Take an arbitrary scalar function ψ : M → R and consider the transformationof our differential operator
(5.5) L → eψLeψ.
The transformation (5.5) is a special case of the transformation (5.2) with Q = eψI,where I is the 2× 2 identity matrix. Substituting this Q into formula (5.4), we get
(5.6) Lsub → e2ψLsub,
so the subprincipal symbol transforms in a covariant fashion.Now take an arbitrary scalar function φ : M → R and consider the transfor-
mation of our differential operator
(5.7) L → e−iφLeiφ.
The transformation (5.7) is a special case of the transformation (5.2) with Q = eiφI.Substituting this Q into formula (5.4), we get
(5.8) Lsub(x) → Lsub(x) + Lprin(x, (gradφ)(x)),
so the subprincipal symbol does not transform in a covariant fashion. We do not(and can not) take any action with regards to the non-covariance of (5.8).
Finally, take an arbitrary matrix-function R : M → SL(2,C) and consider thetransformation of our differential operator
(5.9) L → R∗LR.
Of course, the transformation (5.9) is a special case of the transformation (5.2): weare looking at the case when detQ(x) = 1. It turns out that it is possible to over-come the resulting non-covariance in (5.4) by introducing the covariant subprincipalsymbol Lcsub(x) in accordance with formula
(5.10) Lcsub := Lsub +i
16gαβ{Lprin, adjLprin, Lprin}pαpβ
,
where subscripts pα, pβ indicate partial derivatives, curly brackets denote the gen-eralised Poisson bracket on matrix-functions (2.6) and adj stands for the operatorof matrix adjugation
(5.11) P =
(a bc d
) →
(d −b−c a
)=: adjP
from elementary linear algebra.
Lemma 5.1. The transformation ( 5.9) of the differential operator induces thetransformation
(5.12) Lcsub → R∗LcsubR
of its covariant subprincipal symbol.

ANALYSIS OF FIRST ORDER SYSTEMS 171
The proof of Lemma 5.1 is given in [6].
Formula (5.12) tells us that when working with 2×2 operators in dimension fourit makes sense to use the covariant subprincipal symbol rather than the standardsubprincipal symbol because the covariant subprincipal is ‘more invariant’.
It is easy to check that, like the standard subprincipal symbol, the covariantsubprincipal symbol of a formally self-adjoint non-degenerate first order differentialoperator is an Hermitian matrix-function on the base manifold M . Also, it is easyto see that Lprin(x, p) and Lcsub(x) uniquely determine our operator L.
Substituting (1.5) into (5.10), we get
(5.13) Lcsub = L0 +i
2(Lprin)xαpα
+i
16gαβ{Lprin, adjLprin, Lprin}pαpβ
.
Comparing formulae (1.5) and (5.13), we see that the standard subprincipal sym-bol and covariant subprincipal symbol have the same structure, except that thecovariant subprincipal symbol has a second correction term designed to ‘take care’of special linear transformations.
Examination of formulae (5.10), (5.6) and (5.8) shows that the transformations(5.5) and (5.7) of the differential operator induce the transformations
Lcsub → e2ψLcsub ,(5.14)
Lcsub(x) → Lcsub(x) + Lprin(x, (gradφ)(x))(5.15)
of its covariant subprincipal symbol. Thus, the switch from standard subprincipalsymbol to covariant subprincipal symbol ‘does not spoil’ the behaviour under thetransformations (5.5) and (5.7).
The non-degeneracy condition (1.7) implies that for each x ∈M the matrices
(5.16) σα(x) := (Lprin)pα(x), α = 1, 2, 3, 4,
form a basis in the real vector space of 2× 2 Hermitian matrices. Decomposing thecovariant subprincipal symbol Lcsub(x) with respect to this basis, we get Lcsub(x) =σα(x)Aα(x) with some real coefficients Aα(x), α = 1, 2, 3, 4. The latter formulacan be rewritten in more compact form as
(5.17) Lcsub(x) = Lprin(x,A(x)),
where A is a covector field with components Aα(x), α = 1, 2, 3, 4. Formula (5.17)tells us that the covariant subprincipal symbol Lcsub is equivalent to a real-valuedcovector field A, the electromagnetic covector potential.
Examination of formulae (5.12) and (5.14)–(5.17) shows that our electromag-netic covector potential A is invariant under the transformations (5.9) and (5.5) ofour differential operator L, whereas the transformation (5.7) induces the transfor-mation A → A+ gradφ.
The geometric and theoretical physics interpretations of the transformations(5.5), (5.7) and (5.9) are discussed in detail in [6].
6. A non-geometric representation of the massive Dirac equation in 4D
As explained in the previous section, in dimension four our formally self-adjointnon-degenerate 2 × 2 first order differential operator L is completely determined

172 YAN-LONG FANG AND DMITRI VASSILIEV
by its principal symbol Lprin(x, p) and covariant subprincipal symbol Lcsub(x).Namely, in local coordinates the formula for the differential operator L reads
L = −i[(Lprin)pα(x)]
∂
∂xα(6.1)
− i
2(Lprin)xαpα
(x)− i
16(gαβ{Lprin, adjLprin, Lprin}pαpβ
)(x) + Lcsub(x).
Further on we use the notation
(6.2) L = Op(Lprin, Lcsub)
as shorthand for (6.1). We call (6.2) the covariant representation of the differentialoperator L.
Using the covariant representation (6.2) and matrix adjugation (5.11), we definethe adjugate of the differential operator L as
AdjL := Op(adjLprin, adjLcsub).
We define the Dirac operator as the differential operator
(6.3) D :=
(L mImI AdjL
)acting on 4-columns v of complex-valued scalar fields. Here m is the electron massand I is the 2× 2 identity matrix.
We claim that the system of four scalar equations Dv = 0 is equivalent tothe Dirac equation in its traditional geometric formulation. In order to justifythis claim, we need to compare our Dirac operator (6.3) with the traditional Diracoperator Dtrad, see Appendix A in [6] for the definition.
Theorem 6.1. The two operators are related by the formula
D = | det gκλ|1/4 Dtrad | det gμν |−1/4 ,
where the Lorentzian metric is defined in accordance with formula ( 3.2).
The proof of Theorem 6.1 is given in [6].
Our representation (6.3) of the massive hyperbolic Dirac operator in dimen-sion four is given in an analytic language different from the traditional geometriclanguage. Hence, we feel the need to reassure the reader that all the standardingredients are implicitly contained in (6.3).
The matrices (5.16) are our Pauli matrices. Moreover, it is easy to see that ourdefinition of the metric (3.2) ensures that our Pauli matrices (5.16) automaticallysatisfy the standard defining relation σα(adjσβ) + σβ(adjσα) = −2Igαβ .
The traditional representation of the Dirac operator involves covariant deriva-tives of spinor fields with respect to the Levi-Civita connection. Technical calcula-tions given in [6] show that these connection coefficients are contained within thePoisson bracket term in our definition of the covariant subprincipal symbol (5.10).More precisely, the Poisson bracket term in formula (5.10) does not give each spinorconnection coefficient separately; rather it gives their sum, the way they appear inthe Dirac operator.

ANALYSIS OF FIRST ORDER SYSTEMS 173
7. Dimension three is special
In the remainder of the paper, we retain the assumption (3.1), and we alsoassume that
(7.1) n = 3
and that the principal symbol of our formally self-adjoint first order differentialoperator L is trace-free,
(7.2) trLprin(x, p) = 0.
In addition, in the remainder of the paper we assume ellipticity (1.6). Notethat under the assumptions (3.1), (7.1) and (7.2) the ellipticity condition (1.6) isequivalent to the non-degeneracy condition (1.7).
We define the metric tensor in accordance with formula (3.2). It is easy to seethat under the assumptions (3.1), (7.1), (7.2) and (1.6) our metric is Riemannian,i.e., the metric tensor is positive definite.
8. Gauge-theoretic analysis in 3D
The metric tensor defined in accordance with formula (3.2) does not deter-mine the Hermitian matrix-function Lprin(x, p) uniquely. Hence, in this section weidentify a further geometric object encoded within the principal symbol of our dif-ferential operator L. To this end, we will now start varying this principal symbol,assuming the metric g, defined by formula (3.2), to be fixed (prescribed).
Let us fix a reference principal symbol Lprin(x, p) corresponding to the pre-scribed metric g and look at all principal symbols Lprin(x, p) which correspond tothe same prescribed metric g.
Lemma 8.1. If our principal symbol Lprin(x, p) is sufficiently close to the refer-
ence principal symbol Lprin(x, p), then there exists a unique special unitary matrix-function R : M → SU(2) close to the identity matrix such that
Lprin(x, p) = R∗(x) Lprin(x, p)R(x) .
The proof of Lemma 8.1 is given in Section 2 of [5].
The choice of reference principal symbol Lprin(x, p) in our construction is arbi-trary, as long as this principal symbol corresponds to the prescribed metric g, i.e.,as long as we have det Lprin(x, p) = −gαβ(x) pαpβ . It is natural to ask the question:
what happens if we choose a different reference principal symbol Lprin(x, p)? The
freedom in choosing the reference principal symbol Lprin(x, p) is a gauge degreeof freedom in our construction and our results are invariant under changes of thereference principal symbol; see Section 6 of [5] for details.
In order to work effectively with special unitary matrices we need to choosecoordinates on the 3-dimensional Lie group SU(2). It is convenient to describe a2× 2 special unitary matrix by means of a spinor ξ, i.e., a pair of complex numbersξa, a = 1, 2. The relationship between a matrix R ∈ SU(2) and a nonzero spinor ξis given by the formula
(8.1) R =1
‖ξ‖
(ξ1 −ξ2
ξ2 ξ1
),
where the overline stands for complex conjugation and ‖ξ‖ :=√|ξ1|2 + |ξ2|2 .

174 YAN-LONG FANG AND DMITRI VASSILIEV
Formula (8.1) establishes a one-to-one correspondence between SU(2) matricesand nonzero spinors, modulo a rescaling of the spinor by an arbitrary positive realfactor. The matrices
(8.2) σα(x) := (Lprin)pα(x), α = 1, 2, 3,
are the Pauli matrices in our construction.
Remark 8.2. The gauge-theoretic analysis performed in the current section issomewhat different from that of Section 5. Namely, the differences are as follows:
• In the current section, we applied gauge transformations to the principalsymbol, whereas in Section 5 we applied gauge transformations to theoperator itself.
• In the current section we chose a particular principal symbol as a reference,which led to a somewhat different definition of Pauli matrices: compareformulae (8.2) and (5.16).
• In the current section we did not discuss the subprincipal symbol.
9. A non-geometric representation of the massless Dirac action in 3D
In this section, we retain the assumptions (3.1), (7.1), (7.2) and (1.6). Inaddition, we assume that our manifold M is compact (and without boundary).
We study the eigenvalue problem
(9.1) Lv = λsv,
where s(x) is a given positive scalar weight function. Obviously, the problem (9.1)has the same spectrum as the problem
(9.2) s−1/2Ls−1/2v = λv,
so it may appear that the weight function s(x) is redundant. We will, however,work with the eigenvalue problem (9.1) rather than with (9.2) because we want ourproblem to possess a gauge degree of freedom associated with conformal scalings ofthe metric; see Section 5 of [5] for details. Note also that the subprincipal symbolof the operator s−1/2Ls−1/2 is s−1Lsub : here we are looking at formulae (5.5) and(5.6) with ψ = − 1
2 ln s.The eigenvalue problem (9.1) can be thought of as the result of separation of
variables w(x1, x2, x3, x4) = e−iλx4
v(x1, x2, x3) in the hyperbolic system
(9.3) (−is ∂/∂x4 + L)w = 0 ;
compare with formula (2.3). The operator −is ∂/∂x4 + L appearing in the LHS offormula (9.3) is a special case of the ‘relativistic’ hyperbolic operator introducedin Section 4, its special feature being that it has a naturally defined ‘time’ coor-dinate x4 which does not ‘mix up’ with the ‘spatial’ coordinates x1, x2, x3 (localcoordinates on the manifold M).
We define the counting function N(λ) in the usual way (2.4) as the number ofeigenvalues λk of the problem (9.1) between zero and a positive λ. The results fromSection 2 give us explicit formulae for the coefficients a and b of the asymptoticexpansion (2.5), see formulae (2.9) and (2.10), but these formulae do not have aclear geometric meaning. Our aim in the current section is to rewrite these formulaein a geometrically meaningful form.
The coefficients a and b are expressed via the principal and subprincipal symbolsof the operator L as well as the scalar weight function s(x). But in Section 8 we

ANALYSIS OF FIRST ORDER SYSTEMS 175
established that the principal symbol is described by a metric and a nonvanishingspinor field ξ(x), with the latter defined modulo rescaling by an arbitrary positivereal function. We choose to specify the scaling of our spinor field ξ(x) in accordancewith the formula
(9.4) ‖ξ(x)‖ = s(x).
The coefficients a and b can now be expressed via the metric, spinor field andsubprincipal symbol of the operator L.
Theorem 9.1. The coefficients in the two-term asymptotics ( 2.5) of the count-ing function ( 2.4) of the eigenvalue problem ( 9.1) are given by the formulae
(9.5) a =1
6π2
∫M
‖ξ‖3√det gαβ dx ,
(9.6) b =S(ξ)
2π2− 1
4π2
∫M
‖ξ‖2 (trLsub)√det gαβ dx ,
where S(ξ) is the massless Dirac action with Pauli matrices( 8.2) and dx = dx1dx2dx3.
Theorem 9.1 follows from Theorem 1.1 of [3] and Theorem 1.1 of [5]. Themassless Dirac action is defined in Appendix B of [5].
Theorem 9.1 allows us to define the concept of massless Dirac action in di-mension three in a non-geometric way. Namely, if the subprincipal symbol of theoperator L is zero, then the second asymptotic coefficient of the counting functionis, up to the factor 1
2π2 , the massless Dirac action.
10. The covariant subprincipal symbol in 3D
The assumptions in this section are the same as in Section 9.As pointed out in Remark 8.2, the gauge-theoretic analysis performed in
Sections 8 and 5 is somewhat different. In this section, we rewrite Theorem 9.1in the gauge-theoretic language of Section 5.
The central element of the gauge-theoretic analysis of Section 5 was the notionof covariant subprincipal symbol, see formula (5.10) for the definition. This defini-tion of covariant subprincipal symbol works equally well in dimension three, onlyit becomes slightly simpler. Namely, observe that if P is a 2× 2 trace-free matrix,then adjP = −P . Hence, the definition of the covariant subprincipal symbol cannow be rewritten as
(10.1) Lcsub := Lsub −i
16gαβ{Lprin, Lprin, Lprin}pαpβ
.
Let us define the massless Dirac operator on half-densities in accordance withformula (A.19) from [3].
Lemma 10.1. Our operator L is a massless Dirac operator on half-densities ifand only if Lcsub(x) = 0.
Proof. The subprincipal symbol of a massless Dirac operator on half-densitieswas calculated explicitly in Section 6 of [3]. Straightforward calculations show thatthis explicit formula can be rewritten as i
16 gαβ{Lprin, Lprin, Lprin}pαpβ. �
We can now reformulate Theorem 9.1 in the following equivalent form.

176 YAN-LONG FANG AND DMITRI VASSILIEV
Theorem 10.2. The coefficients in the two-term asymptotics ( 2.5) of the count-ing function ( 2.4) of the eigenvalue problem ( 9.1) are given by the formulae
(10.2) a =1
6π2
∫M
s3√det gαβ dx ,
(10.3) b = − 1
4π2
∫M
s2 (trLcsub)√det gαβ dx .
Proof. Formula (10.2) is a consequence of formulae (9.5) and (9.4). Formula(10.3) is a consequence of formulae (9.6), (9.4), (10.1) and Lemma 10.1 of thecurrent paper and Theorem 1.2 of [3]. �
References
[1] M. F. Atiyah, V. K. Patodi, and I. M. Singer, Spectral asymmetry and Riemannian geometry.III, Math. Proc. Cambridge Philos. Soc. 79 (1976), no. 1, 71–99. MR0397799 (53 #1655c)
[2] Olga Chervova, Robert J. Downes, and Dmitri Vassiliev, The spectral function of a first orderelliptic system, J. Spectr. Theory 3 (2013), no. 3, 317–360. MR3073415
[3] Olga Chervova, Robert J. Downes, and Dmitri Vassiliev, Spectral theoretic characterizationof the massless Dirac operator, J. Lond. Math. Soc. (2) 89 (2014), no. 1, 301–320, DOI10.1112/jlms/jdt071. MR3174745
[4] Robert J. Downes, Michael Levitin, and Dmitri Vassiliev, Spectral asymmetry of the mass-less Dirac operator on a 3-torus, J. Math. Phys. 54 (2013), no. 11, 111503, 18, DOI10.1063/1.4828858. MR3137019
[5] R. J. Downes and D. Vassiliev, Spectral theoretic characterization of the massless Diracaction, preprint http://arxiv.org/abs/1401.1951.
[6] Y.-L. Fang and D. Vassiliev, Analysis as a source of geometry: a non-geometric represen-tation of the Dirac equation, Journal of Physics A: Mathematical and Theoretical, 2015,vol. 48, article number 165203 (19 pages). Open Access paper: http://stacks.iop.org/1751-8121/48/165203.
[7] Victor Ivriı, Precise spectral asymptotics for elliptic operators acting in fiberings over mani-folds with boundary, Lecture Notes in Mathematics, vol. 1100, Springer-Verlag, Berlin, 1984.MR771297 (86h:58139)
[8] Victor Ivrii, Microlocal analysis and precise spectral asymptotics, Springer Monographs in
Mathematics, Springer-Verlag, Berlin, 1998. MR1631419 (99e:58193)[9] W.J. Nicoll, Global oscillatory integrals for solutions of hyperbolic systems, Ph.D. thesis,
University of Sussex, 1998.[10] Yu. Safarov, Non-classical two-term spectral asymptotics for self-adjoint elliptic operators,
D.Sc. thesis, Leningrad Branch of the Steklov Mathematical Institute of the USSR Academyof Sciences, 1989, in Russian.
[11] Yu. Safarov and D. Vassiliev, The asymptotic distribution of eigenvalues of partial differ-ential operators, Translations of Mathematical Monographs, vol. 155, American Mathemat-ical Society, Providence, RI, 1997. Translated from the Russian manuscript by the authors.MR1414899 (97h:58163)
Department of Mathematics, University College London, Gower Street, London
WC1E 6BT, United Kingdom
E-mail address: [email protected]
Department of Mathematics, University College London, Gower Street, London
WC1E 6BT, United Kingdom
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13185
An Embedding into an Orlicz space for L11-Functions
from Irregular Domains
Petteri Harjulehto and Ritva Hurri-Syrjanen
Abstract. We prove an embedding into an Orlicz space for L11-functions de-
fined in irregular bounded John domains of the Euclidean n-space. We showthat the result is essentially sharp. We also study Orlicz embeddings for L1
p-functions, 1 < p < n.
1. Introduction
We study the embeddings for L11-functions defined in bounded irregular ϕ-John
domains of the Euclidean n-space. The space L11 is the space of distributions with
the first-order derivatives in the space L1. Suppose that α ∈ [1, 1+ 1n−1 ) and β ≥ 0.
Let ϕ : [0,∞)→ [0,∞) be the function ϕ(0) = 0 and
(1.1) ϕ(t) =tα
logβ(e+ t−1).
A bounded domain D in Rn , n ≥ 2 , is a ϕ-John domain if there exist a constantcJ > 0 and a point x0 ∈ D such that each point x ∈ D can be joined to x0 by arectifiable curve γ : [0, l]→ D, parametrized by its arc length, such that γ(0) = x,γ(l) = x0, l ≤ cJ , and
ϕ(t) ≤ cJ dist(γ(t), ∂D
)for all t ∈ [0, l].
Examples of these domains are classical John domains [10, 2.1, p. 384], andhence Lipschitz domains and uniform domains, when ϕ(t) = t. More generally, alls-John domains are ϕ-John domains with ϕ(t) = ts , s > 1, [16, Definition, p. 85].Examples of ϕ-John domains with
(1.2) ϕ(t) =t
log(e+ t−1)
are domains with some cusps, [7, Example 6.5], and mushroom-type domains,[7, Example 6.2].
Embeddings into Orlicz spaces of exponential type for domains with a conecondition are well known [18, Theorem 1, Theorem 2]; see also [20], [14], [13].A. Cianchi has proved sharp results for Orlicz-Sobolev spaces defined in domainssatisfying relative isoperimetric inequalities in [3, Theorem 2 and Example 1]. His
2010 Mathematics Subject Classification. Primary 46E35, 26D10, 46E30.Key words and phrases. Orlicz embedding, irregular domain, ϕ-John domain.
c©2015 P. Harjulehto, R. Hurri-Syrjanen
177

178 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
work covers Orlicz spaces of exponential type and more. Especially, classical Johndomains satisfy the so-called Trudinger’s inequality, [3, Example 1]. Results withweights for s-John domains can be found in [19, Theorem 2].
There is an embedding W 1,p(D) ↪→ Lnp/(n−p)(D) for a classical John domain Dwith 1 ≤ p < n, [1, Lemma 3 and Lemma 4, (6)] and [15, Theorem]. An embeddinginto Orlicz spaces of logarithmic type has been proved for L1
p-functions, 1 < p < n,defined in ϕ-John domain with condition (1.2), [7, Theorem 1.1]. The method thereis partly a modification of L. I. Hedberg’s optimization argument with the Rieszpotential, [8, Lemma, (3)]. The use of the fact that the Hardy-Littlewood maximaloperator is bounded from Lp → Lp, when 1 < p < n, is critical in the proof of[7, Theorem 1.1.]. Hence, the L1
1-functions need to be considered in a different waythan [7].
We prove an Orlicz embedding for L11-functions defined in irregular ϕ-John
domains.
Our main theorem is the following.
Theorem 1.1. Suppose that α ∈ [1, 1 + 1n−1 ) and β ≥ 0. Let Φ1 : [0,∞) →
[0,∞) be the function
Φ1(t) =
(t
logβ(n−1)(m+ t)
) nα(n−1)
with m ≥ e. If D is a ϕ-John domain in Rn defined in (1.1), then there exists aconstant C depending on α, β, n, and D only such that the inequality
(1.3) ‖u− uD‖LΦ1 (D) ≤ C‖∇u‖L1(D)
holds for all u ∈ L11(D).
We give the proof for Theorem 1.1 in Section 5 and we show that the result isessentially sharp in Section 6. We give auxiliary results in Section 2 and Section 3.Further, we study Orlicz embeddings for L1
p-functions in Section 4 also when 1 <p < n.
2. Preliminaries
An open ball with a center x and radius r > 0 is written as B(x, r). Thecorresponding closed ball is denoted by B(x, r). Given any set A in Rn and anyx ∈ Rn, the distance between x and the boundary ∂A is written as dist(x, ∂A), anddiam(A) stands for the diameter of A. The characteristic function of A is denotedby χA. When A in Rn is a Lebesgue measurable set with positive n-Lebesguemeasure |A|, we write the integral average of an integrable function u in A as
uA =
A
u(x) dx = |A|−1
ˆA
u(x) dx .
We let C(∗, · · · , ∗) denote a constant which depends on the quantities appearingin the parentheses only. In calculations, we usually write C for constants whenit is not important to specify the dependence on the quantities appearing in thecalculations. However in different lines, C might stand for different constants.
Throughout this paper, D is a bounded domain in Rn, n ≥ 2. The space L1p(D),
1 ≤ p <∞, is the space of distributions with the first-order derivatives on D in thespace Lp(D). The space L1
p(D)∩C∞(D) is dense in L1p(D), [11, 1.1.5, Theorem 1].

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 179
Let 1 ≤ p < n. Let Φp : [0,∞)→ [0,∞) be the function
(2.1) Φp(t) =
(t
logβ(n−1)(m+ t)
)np(p−α(p−1))α(n−p)
,
where m, depending on α, β, n, and p, is chosen so that Φp is a convex function.We study the Orlicz space LΦp(D) which means all measurable functions u in Dsuch that ˆ
D
Φp(|λu(x)|) dx <∞
with some fixed λ > 0. Since the function (2.1) satisfies the Δ2-condition withsome fixed constant C, that is, Φp(2t) ≤ CΦp(t), for all t ∈ [0,∞), this space isequivalent to a space of all measurable functions u withˆ
D
Φp(|u(x)|) dx <∞ .
The space LΦp(D), equipped with the Luxemburg norm
‖u‖LΦp (D) = inf
{λ > 0 :
ˆD
Φp
(|u(x)|
λ
)dx ≤ 1
},
is a Banach space.The point x0 in the definition of the ϕ-John domain given in the beginning of
Section 1 is called a John center of D and the constant cJ is a John constant ofD. If a domain is a ϕ-John domain with a John center x0, then it is a ϕ-Johndomain with any other x ∈ D, but with a different John constant. The functionϕ : [0,∞) → [0,∞) in (1.1) is continuous and strictly increasing. There exists aconstant C > 0 such that
ϕ(t) ≤ Ct and ϕ(t) ≤ Cϕ(t/2)
for all t ∈ [0, cJ ]; here cJ is the John constant.In order to prove that an Orlicz embedding holds in the ϕ-John domains with
the function (1.1), we need several auxiliary results.We start with the following lemma which is a variation of [7, Lemma 3.5]. The
idea is from [6, Theorem 9.3] where the classical John domains are considered.Originally, this type of the chaining argument idea with cubes seems to go back to[2, Lemma 2.1].
Lemma 2.1. Let D in Rn , n ≥ 2 , be a ϕ-John domain with a constant cJ , andlet x0 ∈ D be its John center. For every x ∈ D \B(x0, dist(x0, ∂D)), there exists asequence of balls
(B(xi, ri)
)with B(xi, 2ri) ⊂ D , i = 0, 1, . . . , so that the following
conditions hold for some constants C = C(cJ , α, β), M = M(n), and N = N(n):
(1) x0 is the center of B(x0,
12 dist(x0, ∂D)
)= B0;
(2) ϕ(dist(x,Bi)) ≤ Cri, and ri → 0 as i→∞;(3) no point of the domain D belongs to more than N balls B(xi, ri); and(4) |B(xi, ri) ∪B(xi+1, ri+1)| ≤M |B(xi, ri) ∩B(xi+1, ri+1)|.
For the proof, we refer to [7, Lemma 3.5] where the case α = β = 1 in (1.1)has been proved.
The following pointwise estimate is a generalization of the pointwise estimateof classical John domains, [15], [4].

180 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
Theorem 2.2. [7, Theorem 3.6] Let D in Rn , n ≥ 2 , be a ϕ-John domainwith a constant cJ and x0 ∈ D its John center. Then there exists a constantC = C(n, cJ) such that for all u ∈ L1
1(D), the inequality
∣∣u(x)− uB(x0,dist(x0,∂D))
∣∣ ≤ C
ˆD
|∇u(y)|ϕ(|x− y|
)n−1 dy
holds for almost every x ∈ D.
The proof of Theorem 2.2 is similar to the proof of the case α = β = 1 in (1.1)which has been proved in [7, Theorem 3.6].
3. The modified Riesz potential and pointwise estimates
In order to obtain estimates for the integral of the integral representation inTheorem 2.2, we use the Hardy-Littlewood maximal operator. The classical cen-tered Hardy-Littlewood maximal operator is written as
Mf(x) = supr>0
B(x,r)
|f(y)| dy
for locally integrable functions f in Rn that is, f ∈ L1loc(R
n), [17, Section 1].
Lemma 3.1. Suppose that δ > 0. Let 0 < α < 1 + 1/(n− 1) and β ≥ 0 and ϕbe given in (1.1). If f ∈ L1
loc(Rn), then the inequality
ˆB(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy ≤ Cδn+(1−n)α logβ(n−1)(e+ 1/δ)Mf(x)
holds with a constant C = C(α, β, n) for every x ∈ Rn.
Proof. Let x ∈ Rn be fixed and let δ be given. Let us divide the ball B(x, δ)into annuli and estimate
ˆB(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy ≤∞∑k=1
ϕ(δ2−k)1−n
ˆ{z:2−kδ≤|x−z|<2−k+1δ}
|f(y)| dy
≤ C(n)
∞∑k=1
ϕ(δ2−k)1−n(2−kδ)n {z:|x−z|<2−k+1δ}
|f(y)| dy
≤ C(n)Mf(x)
∞∑k=1
(δ2−k)α(1−n)
logβ(1−n)(e+ δ−12k)(2−kδ)n
≤ C(n)δn+(1−n)αMf(x)
∞∑k=1
logβ(n−1)(e+ δ−12k)
2kα(1−n)+kn.
We analyze the last sum. If δ ≥ 1, then
∞∑k=1
logβ(n−1)(e+ δ−12k)
2(α(1−n)+n)k≤
∞∑k=1
logβ(n−1)(e+ 2k)
2k(α(1−n)+n)= C <∞

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 181
whenever α < 1 + 1/(n− 1). If 0 < δ < 1 and β(n− 1) ≤ 1, then
∞∑k=1
logβ(n−1)(e+ δ−12k)
2k(α(1−n)+n)≤
∞∑k=1
logβ(n−1)(eδ−1 + δ−12k)
2k(α(1−n)+n)
=
∞∑k=1
(log(e+ 2k) + log(1/δ)
)β(n−1)
2k(α(1−n)+n)
≤ 2β(n−1)∞∑k=1
logβ(n−1)(e+ 2k)
2kα(1−n)+n)+ 2β(n−1)
∞∑k=1
logβ(n−1)(1/δ)
2k(α(1−n)+n)
≤ 2β(n−1)C + C2β(n−1) logβ(n−1)(1/δ) ≤ 2β(n−1)C logβ(n−1)(e+ 1/δ),
whenever α < 1 + 1/(n− 1) and β ∈ [0, 1/(n− 1)]. If β(n− 1) > 1, the estimatesfollow in the similar way. The claim follows from the above inequalities. �
The following lemma is from [7, Lemma 4.2]. Since there was a small mistakewe prove a correct version here.
Lemma 3.2. Suppose that 1 ≤ p < n and δ > 0. Let ϕ be an increasing functionon (0,∞). If ‖f‖Lp(Rn) ≤ 1, then there is a constant C = C(n, p) such that forevery x ∈ Rn the inequalityˆ
Rn\B(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy ≤ Cϕ(δ)1−nδn−np
holds.
Proof. The case p = 1: Let δ > 0 be given. If ‖f‖L1(Rn) ≤ 1, then an easycalculation givesˆ
Rn\B(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy ≤ ϕ(|x− y|)1−n
ˆRn\B(x,δ)
|f(y)| dy ≤ ϕ(δ)1−n.
Assume then that 1 < p < n. Let us write p′ = p/(p− 1). Let x ∈ Rn be fixedand let δ be given. By Holder’s inequality,ˆ
Rn\B(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy ≤ ‖f‖Lp(Rn)
∥∥χRn\B(x,δ)ϕ(|x− ·|)1−n∥∥Lp′ (Rn)
≤∥∥χRn\B(x,δ)ϕ(|x− ·|)−n
∥∥(n−1)/n
L(n−1)p′/n(Rn).
We obtain for every y ∈ Rn \B(x, δ) that
ϕ(|x− y|)−n ≤ C(n)|B(y, ϕ(|x− y|))|−1
= C(n)
B(y,2|x−y|)
χB(x,δ)(z)|B(x, δ)|−1 |B(y, 2|x− y|)||B(y, ϕ(|x− y|))| dz.
Since α ≥ 1, we have
|B(y, 2t)||B(y, ϕ(t))| =
(2t logβ(e+ 1/t)
tα
)n
≤ 2n
(t logβ(e+ 1/δ)
tα
)n
≤ 2n(
δ
ϕ(δ)
)n

182 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
for every t ≥ δ. We continue our estimate and obtain
ϕ(|x− y|)−n ≤ C(n)
(δ
ϕ(δ)
)n
M(χB(x,δ)|B(x, δ)|−1
)(y)
for every y ∈ Rn \B(x, δ).Let us recall that 1 < p < n. Since 1 < n−1
n p′ < ∞ and the Hardy-Littlewoodmaximal operator is bounded in the corresponding Lebesgue space, [17, Section 1,Theorem 1(c)], we obtain∥∥χRn\B(x,δ)ϕ(|x− ·|)−n
∥∥(n−1)/n
L(n−1)p′/n(Rn)
≤ C(n)
(δ
ϕ(δ)
)n−1 ∥∥M(χB(x,δ)|B(x, δ)|−1
)∥∥(n−1)/n
L(n−1)p′/n(Rn)
≤ C(n, p)
(δ
ϕ(δ)
)n−1 ∥∥χB(x,δ)|B(x, δ)|−1∥∥(n−1)/n
L(n−1)p′/n(Rn)
≤ C(n, p)ϕ(δ)1−n∥∥χB(x,δ)
∥∥(n−1)/n
L(n−1)p′/n(Rn)
≤ C(n, p)ϕ(δ)1−nδnp′ .
This yields the claim together with the first estimate. �
By combining Lemmas 3.1 and 3.2, we obtain a pointwise estimate which iscrucial for the proof of the main theorem, Theorem 1.1.
Theorem 3.3. Let 1 ≤ p < n. Let Φp : [0,∞)→ [0,∞) and ϕ : [0,∞)→ [0,∞)be the functions
Φp : t →(
t
logβ(n−1)(m+ t)
) npαp(n−1)+n−pn
and
ϕ : 0 → 0 and t → tα
logβ(e+ t−1)for t > 0
with α ∈ [1, 1 + 1n−1 ), β ≥ 0, and m ≥ e. Let D in Rn be an open set. If
‖f‖Lp(Rn) ≤ 1, then there exists a constant C = C(α, β, n, p) such that the inequality
Φp
(ˆD
|f(y)|ϕ(|x− y|)n−1
dy
)≤ C(Mf(x))p
holds for every x ∈ Rn.
Proof. Let us write
Ψ(z) =z
logβ(n−1)(m+ z), z ∈ [0,∞).
Note that Ψ is increasing since Φp is convex and Φp(0) = 0. We have to show thatthere exists a constant C such that the inequality
Ψ
(ˆD
|f(y)|ϕ(|x− y|)n−1
dy
)≤ C(Mf(x))
αp(n−1)+n−pnn(3.1)
holds. We may assume that Mf(x) > 0 for every x, since otherwise f(x) = 0 foralmost every x ∈ D.

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 183
Let us first assume that (Mf(x))−pn < diam(D). By Lemmas 3.1 and 3.2 we
obtain thatˆD
|f(y)|ϕ(|x− y|)n−1
dy ≤ Cδn+(1−n)α logβ(n−1)(e+ 1/δ)Mf(x) + Cϕ(δ)1−nδn−np .
By choosing δ = (Mf(x))−pn , we estimateˆ
D
|f(y)|ϕ(|x− y|)n−1
dy
≤ C(Mf(x))−p(n+(1−n)α)
n +1 logβ(n−1)(e+ (Mf(x))
pn
)+ Cϕ
((Mf(x))−
pn
)1−n(Mf(x))−
pn (n−
np )
≤ C(Mf(x))αp(n−1)+n−pn
n logβ(n−1)(e+ (Mf(x))
pn
)+ C(Mf(x))
αp(n−1)+n−pnn logβ(n−1)
(e+ (Mf(x))
pn
)≤ C(Mf(x))
αp(n−1)+n−pnn logβ(n−1)
(e+ (Mf(x))
pn
),
where C depends on α, β, n and p only. Let us write t = e+ (Mf(x))pn . Then, by
the definition of the function Ψ, we have
Ψ
(ˆD
|f(y)|ϕ(|x− y|)n−1
dy
)≤ Ψ
(C(Mf(x))
αp(n−1)+n−pnn logβ(n−1)(t)
)= C(Mf(x))
αp(n−1)+n−pnn
logβ(n−1)(t)
logβ(n−1)(m+ C(Mf(x))
αp(n−1)+n−pnn logβ(n−1)(t)
)≤ C(Mf(x))
αp(n−1)+n−pnn
logβ(n−1)(t)
logβ(n−1)(m+ C(Mf(x))
αp(n−1)+n−pnn
)= C(Mf(x))
αp(n−1)+n−pnn
(log
(e+ (Mf(x))
pn
)log
(m+ C(Mf(x))
αp(n−1)+n−pnn
))β(n−1)
.
We estimate the last term and use l’Hopital’s rule to obtain that the function
z →log
(e+ z
pn
)log
(m+ Cz
αp(n−1)+n−pnn
)is bounded on [0,∞). Hence, the previous inequalities imply that
Ψ
(ˆD
|f(y)|ϕ(|x− y|)n−1
dy
)≤ C(Mf(x))
αp(n−1)+n−pnn .
If diam(D) =∞, the claim follows. If diam(D) <∞, we have to consider the case
(Mf(x))−pn ≥ diam(D) and we choose δ = 2diam(D) . By Lemma 3.1, we obtain
Ψ
(ˆD
|f(y)|ϕ(|x− y|)n−1
dy
)≤ˆB(x,δ)
|f(y)|ϕ(|x− y|)n−1
dy
≤ Cδn+(1−n)α logβ(n−1)(e+ 1/δ)Mf(x)
≤ C(Mf(x))1−p(n+(1−n)α)
n
≤ C(Mf(x))αp(n−1)+n−pn
n .
�

184 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
4. The case 1 < p < n
Theorem 2.2 and Theorem 3.3 imply the result in the case 1 < p < n whichcoincides with [7, Theorem 1.1] when α = β = 1. We state the result for α ≥ 1 andβ ≥ 0.
Theorem 4.1. Suppose that 1 < p < n, α ∈ [1, 1 + 1n−1 ), and β ≥ 0. Let
Φp : [0,∞)→ [0,∞) be the function
Φp(t) =
(t
logβ(n−1)(m+ t)
) npαp(n−1)+n−pn
with m ≥ e. If D is a ϕ-John domain in Rn defined in (1.1), then there exists aconstant C depending on α, β, n, and D only such that the inequality
‖u− uD‖LΦp (D) ≤ C‖∇u‖Lp(D)
holds for all u ∈ L11(D).
Before the proof we give two remarks.
Remark 4.2. Theorem 4.1 coincides with [7, Theorem 1.1] in the caseα = β = 1. It has been shown in [7, Theorem 6.3] that the result in this case isessentially sharp.
Remark 4.3. Theorem 4.1 coincides with the classical case when α = 1 andβ = 0. But, Theorem 4.1 with 1 < α is not sharp in the case β = 0. Namely, theexponent in the Orlicz function Φp should be np
α(n−1)−p+1 , and not npαp(n−1)+n−pn ,
[5, p. 437], [9, Theorem 2.3]. We suggest a conjecture that npα(n−1)−p+1 is the right
exponent also in the case β > 0.
Proof. Let us assume that ‖∇u‖Lp(D) ≤ 1. Then, by Theorem 2.2 and The-orem 3.3 the inequality
Φp
(∣∣u(x)− uB(x0,dist(x0,∂D))
∣∣) ≤ Φp
(ˆD
|∇u(y)|ϕ(|x− y|)n−1
dy
)≤ C (M |∇u|(x))p
holds for every x ∈ D. We recall that M : Lp → Lp is a bounded linear operatorwhenever p > 1. Thus, integrating over D givesˆ
D
Φp
(∣∣u(x)− uB(x0,dist(x0,∂D))
∣∣) dx ≤ C
ˆD
(M |∇u|(x))p dx
≤ C
ˆD
|∇u(x)|p dx ≤ C.
Hence, we have ∣∣∣∣u(x)− uB(x0,dist(x0,∂D))
∣∣∣∣LΦp (D)
≤ C
for every u ∈ L1,p(D) with ‖∇u‖Lp(D) ≤ 1. Using this inequality for u/‖∇u‖Lp(D),we obtain ∣∣∣∣u(x)− uB(x0,dist(x0,∂D))
∣∣∣∣LΦp (D)
≤ C‖∇u‖Lp(D).
The claim follows by the Holder inequality and the Minkowski inequality. �

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 185
5. The proof of the main theorem
Proof. Let us consider functions u such that ‖u‖L1(D) ≤ 1. Let B be thecenter ball in Theorem 2.2. It is enough to show that there is a constant c < ∞such that the inequality
(5.1)
ˆD
Φ1(|u− uB|) dx < c
holds for every ‖∇u‖L1(D) ≤ 1. Inequality (5.1) implies that
(5.2) ‖u− uB‖LΦ1 (D) < C
with some constant C whenever ‖∇u‖L1(D) ≤ 1. By using inequality (5.2) to thefunction u/‖∇u‖L1(D) we obtain
(5.3) ‖u− uB‖LΦ1 (D) ≤ C‖∇u‖L1(D) .
By the triangle inequality,
(5.4) ‖u− uD‖LΦ1 (D) ≤ ‖u− uB‖LΦ1 (D) + ‖uB − uD‖LΦ1 (D).
The latter term in (5.4) can be estimated as
‖uB − uD‖LΦ1(D) = |uB − uD| ‖1‖LΦ1 (D) ≤ |D|−1‖1‖LΦ1 (D)‖u− uB‖L1(D)
≤ C|D|−1‖1‖LΦ1 (D)‖u− uB‖LΦ1(D)
(5.5)
with some constant C. Estimates (5.4), (5.5) , and (5.3) yield the claim (1.3). Nowwe prove inequality (5.1). First we estimateˆ
D
Φ1(|u− uB |) dx ≤∑j∈Z
ˆ{x∈D:2j<|u(x)−uB |≤2j+1}
Φ1(2j+1) dx.
Let us define
vj(x) = max{0,min
{|u(x)− uB | − 2j , 2j
}}for all x ∈ D. If x ∈ {x ∈ D : 2j < |u(x)− uB| ≤ 2j+1}, then vj−1(x) ≥ 2j−1. Weobtain
(5.6)
ˆD
Φ1(|u− uB|) dx ≤∑j∈Z
ˆ{x∈D:vj(x)≥2j}
Φ1(2j+2) dx.
By the triangle inequality and Theorem 2.2, we have
vj(x) = |vj(x)− (vj)B + (vj)B| ≤ |vj(x)− (vj)B|+ |(vj)B|
≤ C
ˆD
|∇vj(y)|ϕ(|x− y|
)n−1 dy + |(vj)B|
for almost every x ∈ D. By the Poincare inequality in a ball, there exists a constantC such that
|(vj)B| = (vj)B =
B
vj(x) dx ≤ B
|u(x)− uB| dx ≤ C
B
|∇u(x)| dx ≤ |B|−1.
Thus, |(vj)B| is bounded by a constant depending on the distance between the Johncenter and the boundary of D only. Let us write
I(∇vj)(x) =
ˆD
|∇vj(y)|ϕ(|x− y|
)n−1 dy.

186 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
We continue to estimate the right hand side of inequality (5.6)ˆD
Φ1(|u− uB |) dx ≤∑j∈Z
ˆ{x∈D:CI(∇vj)(x)+C≥2j}
Φ1(2j+2) dx
≤∑j∈Z
ˆ{x∈D:CI(∇vj)(x)≥2j−1}
Φ1(2j+2) dx+
j0∑j=−∞
ˆD
Φ1(2j+2) dx.
(5.7)
Let us first estimate
(5.8)
j0∑j=−∞
ˆD
Φ1(2j+2) dx = |D|
j0∑j=−∞
Φ1(2j+2) ≤ |D|
j0∑j=−∞
2n(j+2)α(n−1) ≤ C|D|.
Then we estimate the sum∑j∈Z
ˆ{x∈D:CI(∇vj)(x)≥2j−1}
Φ1(2j+2) dx .
Since ‖∇vj‖L1(D) ≤ ‖∇u‖L1(D) ≤ 1, Theorem 3.3 implies that∑j∈Z
ˆ{x∈D:CI(∇vj)(x)≥2j−1}
Φ1(2j+2) dx
=∑j∈Z
ˆ{x∈D:Φ1(CI(∇vj)(x))≥Φ1(2j−1)}
Φ1(2j+2) dx
≤∑j∈Z
ˆ{x∈D:CM |∇vj |(x)≥Φ1(2j−1)}
Φ1(2j+2) dx.
We choose for every x ∈ {x ∈ D : CM |∇vj |(x) ≥ Φ1(2j−2)} a ball B(x, rx) such
that
C
B(x,rx)
|∇vj(y)| dy ≥1
2Φ1(2
j−1).
By the Besicovitch covering theorem (or the 5-covering theorem), we obtain a sub-covering {Bk}∞k=1 so that we may estimate∑
j∈Z
ˆ{x∈D:CI(∇vj)(x)≥2j−1}
Φ1(2j+2) dx ≤
∑j∈Z
∞∑k=1
ˆBk
Φ1(2j+2) dx
≤∑j∈Z
∞∑k=1
|Bk|Φ1(2j+2) ≤
∑j∈Z
∞∑k=1
C|Bk|Φ1(2
j+2)
Φ1(2j−1)
Bk
|∇vj(y)| dy
≤ C∑j∈Z
ˆD
|∇vj(y)| dy ≤ C
ˆD
|∇u(y)| dy ≤ C.
Estimates (5.7), (5.8), and the last estimate imply inequality (5.1) which completesthe proof. �
6. Example
We show that Theorem 1.1 is sharp by constructing a mushroom-type domain.The construction shows also that the result in Theorem 4.1 is not sharp. Mushroom-type domains can be found in [12] and [11]. We construct the mushroom-typedomain suitable to our purposes as in [7, Section 6].

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 187
Let Qm, m = 1, 2, . . . , be a closed cube in Rn with side length 2rm. Let Pm,m = 1, 2, . . . , be a closed rectangle in Rn which has side length rm for one side and2ϕ(rm) for the remaining n − 1 sides. Let Q0 = [0, 1]n. We attach Qm and Pm
together creating ’mushrooms’ which we then attach, as pairwise disjoint sets, toone of the sides of Q0. We add the mushrooms to the side of Q0 that lies in thehyperplane x2 = 1. We refer to Figure 1 in the plane case. We wish to define adomain that is symmetric with respect to the hyperplane x2 = 1
2 . Thus, let Q∗m
and P ∗m be the images of the sets Qm and Pm, respectively, under the reflection
across the hyperplane x2 = 12 . We define
G = int
(Q0 ∪
∞⋃m=1
(Qm ∪ Pm ∪Q∗
m ∪ P ∗m
)).(6.1)
We choose rm = 2−2m, m = 1, 2, . . . . We let ϕ be the function from (1.1). Thenthe domain G is a ϕ-John domain. This can be seen as in [7, Lemma 6.2].
Figure 1. A mushroom-type domain G defined in (6.1) with α =2 and β = 0 in ϕ.

188 PETTERI HARJULEHTO AND RITVA HURRI-SYRJANEN
Theorem 6.1. Let G in Rn, n ≥ 2, be a mushroom-type domain constructedas in (6.1). Let 1 ≤ p < n and ξ ∈ (0, 1/p) be given. If
Ψp : t →(
t
logξβ(n−1)(m+ t)
) npα(n−1)−p+1
with m ≥ e, then there does not exist a constant C, independent of the function u,so that the inequality
(6.2) ‖u− uG‖LΨp (G) ≤ C‖∇u‖Lp(G)
would be valid for every u ∈ L1p(G).
Proof. Let us define a sequence of piecewise linear continuous functions (uk)∞k=1
by setting
uk(x) :=
⎧⎨⎩ vk in Qk,−vk in Q∗
k,0 otherwise,
where vk :=r(p−1)/pk
2n/pϕ(rk)(n−1)/p.
Then the integral average of uk over G is zero for each k. By a straightforwardcalculation, we obtain
‖∇uk‖Lp(G) =
(ˆPk∪P ∗
k
(vkrk
)p
dx
) 1p
= 1
for every k = 1, 2, . . . . If k is large enough, we estimate
ˆG
(|uk(x)|
logξβ(n−1)(m+ |uk(x)|)
) npα(n−1)−p+1
dx
≥ˆQk
(vk
logξβ(n−1)(m+ vk)
) npα(n−1)−p+1
dx
> C
(log
β(n−1)p (e+ 1/rk)
logξβ(n−1)(m+ vk)
) npα(n−1)−p+1
> C
(log
β(n−1)p (1/rk)
logξβ(n−1)(2vk)
) npα(n−1)−p+1
>
(k
β(n−1)p log
β(n−1)p (2)
logξβ(n−1)(r(p−1)/p−(α(n−1))/pk
))np
α(n−1)−p+1
> C
(k
β(n−1)p
kξβ(n−1)
) npα(n−1)−p+1
=: Ik.
If ξ < 1p , then Ik converges to infinity as k →∞. This implies that ‖uk−0‖LΨp (G) =
‖uk‖LΨp (G) →∞ as k →∞. Thus, inequality (6.2) fails. �
References
[1] B. Bojarski, Remarks on Sobolev imbedding inequalities, Complex analysis, Joensuu1987, Lecture Notes in Math., vol. 1351, Springer, Berlin, 1988, pp. 52–68, DOI10.1007/BFb0081242. MR982072 (90b:46068)
[2] J. Boman, Lp-estimates for very strongly elliptic systems, Department of Mathematics, Uni-versity of Stockholm, Sweden, 1982, report no. 29.
[3] Andrea Cianchi, A sharp embedding theorem for Orlicz-Sobolev spaces, Indiana Univ. Math.J. 45 (1996), no. 1, 39–65, DOI 10.1512/iumj.1996.45.1958. MR1406683 (97h:46044)
[4] Piotr Haj�lasz, Sobolev inequalities, truncation method, and John domains, Papers on analysis,Rep. Univ. Jyvaskyla Dep. Math. Stat., vol. 83, Univ. Jyvaskyla, Jyvaskyla, 2001, pp. 109–126. MR1886617 (2003a:46052)

AN EMBEDDING INTO AN ORLICZ SPACE FOR L11-FUNCTIONS 189
[5] Piotr Haj�lasz and Pekka Koskela, Isoperimetric inequalities and imbedding theoremsin irregular domains, J. London Math. Soc. (2) 58 (1998), no. 2, 425–450, DOI10.1112/S0024610798006346. MR1668136 (99m:46079)
[6] Piotr Haj�lasz and Pekka Koskela, Sobolev met Poincare, Mem. Amer. Math. Soc. 145 (2000),no. 688, x+101, DOI 10.1090/memo/0688. MR1683160 (2000j:46063)
[7] Petteri Harjulehto, Ritva Hurri-Syrjanen, and Juha Kapulainen, An embedding into an Orliczspace for irregular John domains, Comput. Methods Funct. Theory 14 (2014), no. 2-3, 257–
277, DOI 10.1007/s40315-014-0053-3. MR3265361[8] Lars Inge Hedberg, On certain convolution inequalities, Proc. Amer. Math. Soc. 36 (1972),
505–510. MR0312232 (47 #794)[9] T. Kilpelainen and J. Maly, Sobolev inequalities on sets with irregular boundaries, Z. Anal.
Anwendungen 19 (2000), no. 2, 369–380, DOI 10.4171/ZAA/956. MR1768998 (2001g:46075)[10] O. Martio and J. Sarvas, Injectivity theorems in plane and space, Ann. Acad. Sci. Fenn. Ser.
A I Math. 4 (1979), no. 2, 383–401, DOI 10.5186/aasfm.1978-79.0413. MR565886 (81i:30039)[11] Vladimir Maz’ya, Sobolev spaces with applications to elliptic partial differential equations,
Second, revised and augmented edition, Grundlehren der Mathematischen Wissenschaften[Fundamental Principles of Mathematical Sciences], vol. 342, Springer, Heidelberg, 2011.MR2777530 (2012a:46056)
[12] Vladimir G. Maz′ya and Sergei V. Poborchi, Differentiable functions on bad domains, WorldScientific Publishing Co., Inc., River Edge, NJ, 1997. MR1643072 (99k:46057)
[13] Jaak Peetre, Espaces d’interpolation et theoreme de Soboleff (French), Ann. Inst. Fourier(Grenoble) 16 (1966), no. fasc. 1, 279–317. MR0221282 (36 #4334)
[14] S. I. Pohozhaev, On the imbedding Sobolev theorem for pl = n, Doklady Conference, SectionMath. Moscow Power Inst. (1965), 158-170 (in Russian).
[15] Yu. G. Reshetnyak, Integral representations of differentiable functions in domains with anonsmooth boundary (Russian), Sibirsk. Mat. Zh. 21 (1980), no. 6, 108–116, 221. MR601195(83h:26019)
[16] Wayne Smith and David A. Stegenga, Holder domains and Poincare domains, Trans. Amer.Math. Soc. 319 (1990), no. 1, 67–100, DOI 10.2307/2001337. MR978378 (90i:30012)
[17] Elias M. Stein, Singular integrals and differentiability properties of functions, Princeton
Mathematical Series, No. 30, Princeton University Press, Princeton, N.J., 1970. MR0290095(44 #7280)
[18] Neil S. Trudinger, On imbeddings into Orlicz spaces and some applications, J. Math. Mech.17 (1967), 473–483. MR0216286 (35 #7121)
[19] B. V. Trushin, Embedding of a Sobolev space into an Orlicz space for a domain with anirregular boundary (Russian, with Russian summary), Mat. Zametki 79 (2006), no. 5, 767–778, DOI 10.1007/s11006-006-0080-0; English transl., Math. Notes 79 (2006), no. 5-6, 707–718. MR2249134 (2007g:46056)
[20] V. I. Judovic, Some estimates connected with integral operators and with solutions of ellipticequations (Russian), Dokl. Akad. Nauk SSSR 138 (1961), 805–808. MR0140822 (25 #4236)
Department of Mathematics and Statistics, FI-20014 University of Turku, Finland
E-mail address: [email protected]
Department of Mathematics and Statistics, FI-00014 University of Helsinki, Fin-
land
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13186
Qualitative Properties of Solutions to Structurally Dampedσ-Evolution Models with Time Decreasing Coefficient
in the Dissipation
Mohamed Kainane Mezadek and Michael Reissig
Abstract. In this paper, we study qualitative properties of solutions to theCauchy problem for structurally damped σ−evolution models
utt + (−Δ)σu+ b(t)(−Δ)δut = 0, u(0, x) = u0(x), ut(0, x) = u1(x),
where σ > 1, δ ∈ (0, σ), and b = b(t) is a strictly decreasing positive function.On the one hand, we are interested in Lp − Lq decay estimates of high-orderenergies. On the other hand, we are interested in Gevrey smoothing properties.Finally, we prove the optimality of decay by using scale-invariant models.
1. Introduction
In this paper, we study decay rates of energies of higher order for solutions tothe Cauchy problem for structurally damped σ-evolution models and the smoothingeffect for their solutions. Moreover, we discuss the optimality of our results by usingscale-invariant models. We consider the following Cauchy problem for σ-evolutionequations with a structural damping in (0,∞)× Rn, n ≥ 1 :
(1)utt + (−Δ)σu+ b(t)(−Δ)δut = 0, (t, x) ∈ (0,∞)× Rn,
u(0, x) = u0(x), ut(0, x) = u1(x), σ > 1, δ ∈ (0, σ),
where (u0, u1) are initial data taken from the energy space Hσ(Rn) × L2(Rn). Inthis paper, we shall study only the case of a strictly decreasing coefficient in thedamping term. The approach differs a bit if we allow increasing coefficients (see[8]). The damping term is a special time-dependent case of a family of damp-ing operators which are introduced in [3]. Theoretical arguments and empiricalstudies motivated them to consider such damping operators describing strong orstructurally damping effects. Our model of interest is widely used in the fields of
2010 Mathematics Subject Classification. Primary 35G10, 35L15.Key words and phrases. Structurally damped σ-evolution models, energies of higher order,
Lp − Lq decay estimates, time-dependent dissipation, smoothing properties, optimality of decay,scale-invariant models.
Financial support for this project which was part of the PhD thesis of the first author wasgiven by the Minister of Education and Scientific Research of Algeria and Science Faculty of ChlefUniversity during the period October 2011 to March 2013 at TU Bergakadmie Freiberg. The first
author thanks the Faculty for Mathematics and Computer Science for their hospitality during theperiod January 2011 to March 2014.
c©2015 M. Kainane Mezadek, M. Reissig
191

192 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
semi-conductivity, super-conductivity, electromagnetic waves, electrolyte and elec-trode materials, and so on (see [5]). A complete theory for qualitative estimatesof solutions are presented in the case σ = 1, δ = 0 (classical damped wave modelwith time-dependent dissipation) in Wirth [13] and [14]. In these papers, cases ofnon-effective or effective dissipation are distinguished. L2 −L2 decay estimates forthe energies of higher order have been studied in the case b(t) = μ(1 + t)γ , μ > 0and σ = 1, in [7], [11] for γ ∈ [−1, 0], γ ∈ (0, 1], respectively. In [5] the case thatb = b(t) is a strictly monotonic positive function for δ = σ/2, σ > 1 is considered.Lp − Lq decay estimates for solutions (not necessarily on the conjugate line) arestudied in [12] in the case b(t) ≡ 1 and σ = δ = 1 (which corresponds to a visco-elastic model in [12] or to a wave model with internal damping in [6]) and in thecase b(t) ≡ μ, μ > 0, and σ = 1 in [10].
We now turn to the Cauchy problem (1). Here we allow in contrast to [7] or[11] a general time-dependent coefficient b = b(t). Therefore, more quantitativeproperties of the coefficient (see assumptions (A1) to (A6) from Section 2) arerequired. After partial Fourier transformation Fx→ξ(u)(t, ξ) =: u(t, ξ) of (1) weobtain the Cauchy problem
utt + |ξ|2σu+ b(t)|ξ|2δut = 0, (t, ξ) ∈ (0,∞)× Rn,
u(0, ξ) = u0(ξ), ut(0, ξ) = u1(ξ), σ > 1, δ ∈ (0, σ).(2)
In Sections 2 to 4, we only treat the case δ ∈ (0, σ2 ). The treatment of the case
δ ∈ [σ2 , σ) is briefly presented in Section 5.
2. Estimates for energies of higher order
We impose the following conditions on the coefficient function b = b(t) :
(A1) positivity : b(t) > 0 for all t ≥ 0,(A2) strictly decreasing behavior : b′(t) < 0 for all t ≥ 0,(A3) non-integrability :
∫∞0
b(τ )dτ =∞,
(A4) higher order derivatives : |dkt b(t)| ≤ Ckb(t)(
11+t
)kholds for k = 1, 2,
(A5) useful inequalities : there exist positive constants C0, C1, C2 which areindependent of t such that
C0b(t)
Λ1(t)≤ −b′(t)
b(t)≤ C1
1
1 + t≤ C2
b(t)
Λ1(t)with Λ1(t) = 1 +
∫ t
0
b(τ )dτ,
(A6) additional classification : b ∈ Sα for α ∈(1, σ
2δ
], where we introduce the
family {Sα}α of classes
Sα :={b = b(t) : lim sup
t→∞
1 + t
Λ1(t)α<∞, lim
t→∞
1 + t
Λ1(t)β=∞ for all β < α
}.
Example 2.1. Let us choose b = b(t) as
b(t) = (1 + t)−γ(log(e+ t))−γ1 · · · (log[n](e[n] + 1))−γn ,
where γ ∈ (0, 1), γk > 0 for all k = 1, . . . , n. We set
log[n](x) = log(log[n−1](x)), e[n] = ee[n−1]
.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 193
2.1. Division of the extended phase space into zones. We divide theextended phase space {(t, ξ) ∈ [0,∞)×Rn} into the following zones (part of regions)
with Λ1(t) = 1+∫ t
0b(s)ds, where ε is sufficiently small and N is sufficiently large :
hyperbolic zone: Zhyp(ε) ={(t, ξ) :
b(t)
2|ξ|2δ−σ ≤ 1− ε
},
reduced zone: Zred(ε) ={(t, ξ) : 1− ε ≤ b(t)
2|ξ|2δ−σ ≤ 1 + ε
},
elliptic zone:
Zell(ε,N) ={(t, ξ) :
b(t)
2|ξ|2δ−σ ≥ 1 + ε and Λ1(t)|ξ|2δ ≥ N
},
pseudo-differential zone:
Zpd(ε,N) ={(t, ξ) :
b(t)
2|ξ|2δ−σ ≥ 1 + ε and Λ1(t)|ξ|2δ ≤ N
}.
We introduce separation lines. By tk = tk(|ξ|), k = 0, 1, 2, we denote the separationline between the pseudo-differential zone and the elliptic zone (k = 0), between theelliptic zone and the reduced zone (k = 1), and between the reduced zone and thehyperbolic zone (k = 2).
Lemma 2.2. If lim supt→∞ (1 + t)Λ1(t)− σ
2δ = ∞, then the elliptic zone is acompact set. If lim supt→∞ (1 + t)Λ1(t)
− σ2δ = 0, then the elliptic zone is not a
compact set.
Proof. By using the definition of the separating line between the pseudo-differential and elliptic zone, we have
Λ1(t0(|ξ|))|ξ|2δ = N, hence, |ξ| =( N
Λ1(t0(|ξ|))) 1
2δ
.
Analogously, from the separating line between the elliptic and reduced zone we have
b(t1(|ξ|))2
|ξ|2δ−σ = 1 + ε, hence, |ξ| =(b(t1(|ξ|))2(1 + ε)
) 1σ−2δ
.
In order that the elliptic zone has really its own meaning, one should guarantee( N
Λ1(t)
) 12δ ≤
( b(t)
2(1 + ε)
) 1σ−2δ
, b(t)Λ1(t)σ−2δ2δ ≥ 2(1 + ε)
N2δ−σ2δ
.
After integration we conclude
Λ1(t)σ2δ ≥ 1 +
σ(1 + ε)
δN2δ−σ2δ
t, hence, Λ1(t)σ2δ ≥ σ(1 + ε)
δN2δ−σ
δ
(1 + t).
Then we get for large t the inequality
(1 + t)Λ1(t)− σ
2δ ≤ δN2δ−σ2δ
σ(1 + ε).
The lemma is proved. �We divide the further considerations into the following cases :
Case 1: lim supt→∞(1 + t)Λ1(t)− σ
2δ = 0.
Case 2: lim supt→∞(1 + t)Λ1(t)− σ
2δ =∞.
Remark 2.1. In our considerations, we omit the “critical case”lim supt→∞(1 + t)Λ1(t)
− σ2δ ∈ (0,∞).

194 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
In the next section we consider Case 1.
3. Treatment for lim supt→∞(1 + t)Λ1(t)− σ
2δ = 0
In this case, the extended phase space is divided into the hyperbolic zoneZhyp(ε), the reduced zone Zred(ε), the elliptic zone Zell(ε,N), and the pseudo-differential zone Zpd(ε,N) for small frequencies and only in the hyperbolic zone forlarge frequencies.
3.1. Treatment in the hyperbolic zone.
Proposition 3.1. The following estimates hold for all t ∈ [t2(|ξ|),∞), wheret2(|ξ|) = 0 for large frequencies :
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
t2(|ξ|)b(τ )dτ
)(|ξ|β|u(t2(|ξ|), ξ)|
+ |ξ|β−σ|ut(t2(|ξ|), ξ)|)
for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
t2(|ξ|)b(τ )dτ
)(|ξ|β+σ|u(t2(|ξ|), ξ)|
+ |ξ|β|ut(t2(|ξ|), ξ)|)
for β ≥ 0.
Proof. We apply a change of variables by the dissipative transformation
u(t, ξ) = exp(− |ξ|2δ
2
∫ t
0
b(τ )dτ)v(t, ξ).
Let us introduce the micro-energy V = V (t, ξ) in Zhyp(ε) as follows :
V (t, ξ) =(p(t, ξ)v(t, ξ), Dtv(t, ξ)
)Tfor all t ≥ s and (s, ξ) ∈ Zhyp(ε),
where p2(t, ξ) := |ξ|2σ − b2(t)4 |ξ|4δ. By applying a suitable diagonalization proce-
dure (see [8]), we get after the first step of diagonalization that the entries of theremainder are uniformly integrable over the hyperbolic zone Zhyp(ε). Therefore we
can write V (1)(t, ξ) = E1(t, s, ξ)V(1)(s, ξ), where E1(t, s, ξ) is the fundamental solu-
tion, that is the solution of the system (D(t, ξ) denotes the diagonal part, R1(t, ξ)denotes the remainder)
DtE1(t, s, ξ) =(D(t, ξ) +R1(t, ξ)
)E1(t, s, ξ), E1(s, s, ξ) = I2,
for all t ≥ s and (s, ξ) ∈ Zhyp(ε). Straightforward calculations (see [8]) imply
‖E1(t, s, ξ)‖ ≤ C for all t ≥ s and (s, ξ) ∈ Zhyp(ε).
Finally, we obtain the following estimate for the transformed micro-energy V (1)(t, ξ)for all t ≥ s and (s, ξ) ∈ Zhyp(ε) :
|V (1)(t, ξ)| ' |V (1)(s, ξ)|, hence,∣∣∣ (p(t, ξ)v(t, ξ)
Dtv(t, ξ)
) ∣∣∣ ' ∣∣∣ (p(s, ξ)v(s, ξ)Dtv(s, ξ)
) ∣∣∣.After backward transformation u(t, ξ) = exp
(− |ξ|2δ
2
∫ t
0b(s)ds
)v(t, ξ), we have(
p(t, ξ)u(t, ξ)Dtu(t, ξ)
)= exp
(− |ξ|2δ
2
∫ t
0
b(τ )dτ)(
1 0
−i b(t)|ξ|2δ
2p(t,ξ) 1
)(p(t, ξ)v(t, ξ)Dtv(t, ξ)
).

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 195
Using the equivalence p(t, ξ) ∼ |ξ|σ in Zhyp(ε) gives the following a priori estimatefor all t ≥ s and (s, ξ) ∈ Zhyp(ε) :∣∣∣ (|ξ|σu(t, ξ)
Dtu(t, ξ)
) ∣∣∣ ' exp(− |ξ|2δ
2
∫ t
s
b(τ )dτ)∣∣∣ (|ξ|σu(s, ξ)
Dtu(s, ξ)
) ∣∣∣.Consequently, we derive for β ≥ σ the a priori estimates
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
s
b(τ )dτ)(|ξ|β|u(s, ξ)|+ |ξ|β−σ|ut(s, ξ)|
).
In the same way, we conclude for β ≥ 0 the a priori estimates
|ξ|β |ut(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
s
b(τ )dτ)(|ξ|β+σ|u(s, ξ)|+ |ξ|β|ut(s, ξ)|
).
Setting s = t2(|ξ|), all desired estimates are proved. �Moreover, the diagonalization procedure and theory of Volterra integral equa-
tions leads to the following statement.
Corollary 3.2. In the hyperbolic zone, we have the following representationof solutions for all t ≥ s and (s, ξ) ∈ Zhyp(ε) :(
1 0
i b(t)|ξ|2δ
2p(t,ξ) 1
)(p(t, ξ)u(t, ξ)Dtu(t, ξ)
)= exp
(− |ξ|2δ
2
∫ t
sb(τ )dτ
)MEd(t, s, ξ)Q(t, s, ξ)M−1
(p(s, ξ)u(s, ξ)Dtu(s, ξ)
),
(3)
where the matrices M, Ed(t, s, ξ) and Q(t, s, ξ) are defined in [8].
3.2. Treatment in the reduced zone.
Proposition 3.3. The following estimates hold for all t ∈ [t1(|ξ|), t2(|ξ|)] :
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β |u(t1(|ξ|), ξ)|
+|ξ|β−σ|ut(t1(|ξ|), ξ)|)
for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β+σ|u(t1(|ξ|), ξ)|
+|ξ|β |ut(t1(|ξ|), ξ)|)
for β ≥ 0.
Proof. By applying the dissipation transformation
u(t, ξ) = exp(− |ξ|2δ
2
∫ t
0
b(τ )dτ)v(t, ξ),
we transfer the above equation (2) into
vtt(t, ξ) +(|ξ|2σ − b(t)2
4|ξ|4δ − b′(t)
2|ξ|2δ
)v(t, ξ) = 0 for all t ∈ [t1(|ξ|), t2(|ξ|)].
Thus, we define the micro-energy
V (t, ξ) =(εb(t)
2|ξ|2δv(t, ξ), Dtv(t, ξ)
)T
for all t ≥ t1(|ξ|) and (t, ξ) ∈ Zred(ε),
V (t1(|ξ|), ξ) =(εb(t1(|ξ|))
2|ξ|2δv(t1(|ξ|), ξ), Dtv(t1(|ξ|), ξ)
)T
.

196 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
We get the following system of first order :
(4) DtV (t, ξ) =
⎛⎝ Dtb(t)b(t) ε b(t)
2 |ξ|2δ|ξ|2σ− 1
4 b2(t)|ξ|4δ− 1
2 b′(t)|ξ|2δ
ε b(t)2 |ξ|2δ
⎞⎠V (t, ξ).
We can estimate the norm of the coefficient matrix as before by 2εb(t)|ξ|2δ forsufficiently large t.
Lemma 3.4. The fundamental solution E = E(t, s, ξ) to ( 4) is estimated by
‖E(t, s, ξ)‖ ≤ exp(2ε|ξ|2δ
∫ t
s
b(τ )dτ)
for all t ≥ s and (t, ξ), (s, ξ) ∈ Zred(ε),
where t1(|ξ|) is sufficiently large.
Applying the backward transformation and the equivalence b(t)2 |ξ|2δ ∼ |ξ|σ, we
conclude the next a priori estimates for all t ≥ s and (t, ξ), (s, ξ) ∈ Zred(ε) :
|ξ|β|u(t, ξ)| ' exp((2ε− 1)
|ξ|2δ2
∫ t
s
b(τ )dτ)(|ξ|β |u(s, ξ)|+ |ξ|β−σ|ut(s, ξ)|
),
|ξ|β|ut(t, ξ)| ' exp((2ε− 1)
|ξ|2δ2
∫ t
s
b(τ )dτ)(|ξ|β+σ|u(s, ξ)|+ |ξ|β|ut(s, ξ)|
).
Setting s = t1(|ξ|) implies the statements of the proposition. �
3.3. Treatment in the elliptic zone.
Proposition 3.5. The following estimates hold for all t ≥ t0(|ξ|) and (t, ξ) ∈Zell(ε,N) :
|ξ|β|u(t, ξ)| ' exp(− C|ξ|2σ−2δ
∫ t
t0(|ξ|)
1
b(τ )dτ
)(|ξ|β|u(t0(|ξ|), ξ)|
+ |ξ|β−2δα|ut(t0(|ξ|), ξ)|)
for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− C|ξ|2σ−2δ
∫ t
t0(|ξ|)
1
b(τ )dτ
)|ξ|β+σ
(|u(t0(|ξ|), ξ)|
+ |ξ|−2δα|ut(t0(|ξ|), ξ)|)+ exp
(− |ξ|2δ
∫ t
t0(|ξ|)b(τ )dτ
)|ξ|β|ut(t0(|ξ|), ξ)|
for β ≥ 0.
Proof. The proof is divided into several steps.Step 1 : A straightforward estimate for the fundamental solution.
Proposition 3.6. The fundamental solution E = Ekl(t, s, ξ), k, l = 1, 2, sat-isfies the following estimate for all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N) :(
|E11(t, s, ξ)| |E12(t, s, ξ)||E21(t, s, ξ)| |E22(t, s, ξ)|
)' exp
(− C
∫ t
s
|ξ|2σ−2δ
b(τ )dτ
)×
(1 1
b(s)|ξ|2δ−σ
b(t)|ξ|2δ−σ b(t)b(s)
),
where the constant C is independent of (s, ξ), (t, ξ) ∈ Zell(ε,N).

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 197
Proof. Further considerations are based on suitable properties of hierarchiesof symbol classes. Let us introduce the micro-energy U = U(t, ξ) in the ellipticzone by
U(t, ξ) =(|ξ|σu(t, ξ), Dtu(t, ξ)
)Tfor all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N).
By applying a suitable diagonalization procedure (see [8]), we get after the secondstep of diagonalization that the entries of the remainder matrix R2(t, ξ) are uni-formly integrable over the elliptic zone. Hence, we can find the solution U (2) =U (2)(t, ξ) as the solution to the system(
Dt −D(t, ξ)− F (1)(t, ξ)−R2(t, ξ))U (2)(t, ξ) = 0.
We can write U (2)(t, ξ) = E2(t, s, ξ)U(2)(s, ξ), where E2(t, s, ξ) is the fundamental
solution, that is, the solution of the system
DtE2(t, s, ξ) =(D(t, ξ) + F (1)(t, ξ) +R2(t, ξ)
)E2(t, s, ξ), E2(s, s, ξ) = I2,
for all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N). After straightforward calculations(see [8]), it follows that
(5)
(|E(11)
2 (t, s, ξ)| |E(12)2 (t, s, ξ)|
|E(21)2 (t, s, ξ)| |E(22)
2 (t, s, ξ)|
)' exp
(− C
∫ t
s
|ξ|2σ−2δ
b(τ )dτ
)(1 11 1
)for all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N). From
U (2)(t, ξ) = N−11 (t, ξ)M−1(t, ξ)U(t, ξ),
the backward transformation from the first and second step of diagonalization givesthe representation
E(t, s, ξ) = M(t, ξ)N1(t, ξ)E2(t, s, ξ)N−11 (s, ξ)M−1(s, ξ)
for all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N). Finally, by using the structure of thematrices M(t, ξ), M−1(s, ξ), the estimate for the entries of E2(t, s, ξ) from (5) andthe uniform bounded behavior of N1(t, ξ) in the elliptic zone, we get the desiredstatement. �
Remark 3.1. Using Proposition 3.6, we obtain reasonable estimates for |E11|,|E12| and |E22|. The estimate for |E21| is not optimal because the upper bound for|E21| is not bounded in the elliptic zone. This contradicts the damping characterof our model. For this reason, we need a refined estimate which we shall present inthe next step.
Step 2: A refined estimate for the fundamental solution.After straightforward calculations (see [8]), we get the following statement :
Lemma 3.7. The fundamental solution E = Ekl(t, s, ξ), k, l = 1, 2, satisfies forall t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N) the following estimate :(
|E11(t, s, ξ)| |E12(t, s, ξ)||E21(t, s, ξ)| |E22(t, s, ξ)|
)' exp
(− C
∫ t
s
|ξ|2σ−2δ
b(τ )dτ
)×
(1 1
b(s)|ξ|2δ−σ
1b(t)|ξ|2δ−σ
1b(t)b(s)|ξ|4δ−2σ
)+ exp
(− |ξ|2δ
∫ t
s
b(τ )dτ)(
0 00 1
),
where the constant C is independent of (s, ξ), (t, ξ) ∈ Zell(ε,N).

198 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Remark 3.2. We are able to obtain a refined estimate for the fundamentalsolution because we use in the proof of Lemma 3.7 only the estimates for E11, E12
from Proposition 3.6. Both estimates are optimal with our analytical tools.
Lemma 3.8. Let b = b(t) have a decreasing behavior and b ∈ Sα with α ∈ (1, σ2δ ].
Then the following estimate holds for the separating line t0(|ξ|) between the ellipticzone and the pseudo-differential zone :
1
b(t0(|ξ|))' |ξ|2δ−2δα and
1
b(t)' |ξ|2δ−σ.
Proof. By applying the classification condition for b ∈ Sα from (A6) and theassumption (A5), we get
1
b(t0(|ξ|))' 1 + t0(|ξ|)
Λ1(t0(|ξ|)), hence,
1
b(t0(|ξ|))' |ξ|2δ−2δα.
For the second inequality, we use the decreasing behavior of b = b(t) and the defini-tion of the separating line t1 = t1(|ξ|). Finally, this gives the desired statement. �
To conclude, we set s = t0(|ξ|) and use Lemma 3.8. This completes the proofof Proposition 3.5. �
Corollary 3.9. We have the following representation of solutions in theelliptic zone for all t ≥ s and (t, ξ), (s, ξ) ∈ Zell(ε,N) :
(6)
(|ξ|σu(t, ξ)Dtu(t, ξ)
)= exp
(∫ t
s
w(s, ξ)ds)
×M(t, ξ)N1(t, ξ)Q(t, s, ξ)N−11 (s, ξ)M−1(s, ξ)
(|ξ|σu(s, ξ)Dtu(s, ξ)
),
where
w(t, ξ) =1
2
(1 +
b′(t)|ξ|2δb2(t)|ξ|4δ − 4|ξ|2σ
)(√b2(t)|ξ|4δ − 4|ξ|2σ − b(t)|ξ|2δ
),
and the matrices M(t, ξ), N1(t, ξ) and Q(t, s, ξ) are defined as in [8].
3.4. Treatment in the pseudo-differential zone.
Proposition 3.10. The following estimates hold for all t ∈ [0, t0(|ξ|)] :
|ξ|β|u(t, ξ)| '(1 +
∫ t
0
b(τ )dτ)− β
2δ |u0(ξ)|
+(1 +
∫ t
0
b(τ )dτ)− β
2δ
(1 + t)|u1(ξ)| for β ≥ σ,
|ξ|β|ut(t, ξ)| '(1 +
∫ t
0
b(τ )dτ)−β+2σ
2δ
(1 + t)|u0(ξ)|
+ exp(− |ξ|2δ
∫ t
0
b(τ )dτ)|ξ|β|u1(ξ)| for β ≥ 0.
Proof. Let us introduce the micro-energy U = U(t, ξ) as
U(t, ξ) =(
N
Λσ2δ1 (t)
u(t, ξ), Dtu(t, ξ))T
for all t ≥ 0 and (t, ξ) ∈ Zpd(ε,N).

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 199
Then the transformed equation (2) can be written for all t ∈ (0, t0(|ξ|)] in the formof the system of first order
DtU(t, ξ) =
⎛⎜⎜⎜⎜⎜⎝1i ∂t
(N
Λ
σ2δ1 (t)
)N
Λ
σ2δ1 (t)
N
Λσ2δ1 (t)
|ξ|2σΛσ2δ1 (t)
N ib(t)|ξ|2δ
⎞⎟⎟⎟⎟⎟⎠U(t, ξ), U(0, ξ) =(Nu(0, ξ), Dtu(0, ξ)
)T.
Thus the solution U = U(t, ξ) can be represented as U(t, ξ) = E(t, 0, ξ)U(0, ξ),where E(t, 0, ξ) is the fundamental solution. A suitable estimate for the entries ofE(t, 0, ξ) is given by the following statement (see [8]) :
Lemma 3.11. We have the following estimates for all t ∈ [0, t0(|ξ|)] :(|E11(t, 0, ξ)| |E12(t, 0, ξ)||E21(t, 0, ξ)| |E22(t, 0, ξ)|
)'
(Λ− σ
2δ1 (t) (1 + t)Λ
− σ2δ
1 (t)
(1 + t)Λ−σ
δ1 (t) 1
λ2(t,ξ)
),
where λ2(t, ξ) = exp(|ξ|2δ
∫ t
0b(s)ds
).
Now let us come back to
(7) U(t, ξ) = E(t, 0, ξ)U(0, ξ) for all t ∈ [0, t0(|ξ|)].By using the definition of the pseudo-differential zone, we conclude for the elasticenergy and the kinetic energy of higher order the desired estimates from (7) andLemma 3.11. We can now conclude the following :
(8)|ξ|σ|u(t, ξ)| ≤ NΛ1(t)
− σ2δ |u(t, ξ)| ≤ |E11(t, 0, ξ)||Nu0(ξ)|
+ |E12(t, 0, ξ)||u1(ξ)| ' Λ1(t)− σ
2δ |u0(ξ)|+ CΛ1(t)− σ
2δ (1 + t)|u1(ξ)|.For the kinetic energy, we may conclude
(9)
|ut(t, ξ)| ≤ |E21(t, 0, ξ)||Nu0(ξ)|+ |E22(t, 0, ξ)||u1(ξ)|
' Λ1(t)−σ
δ (1 + t)|u0(ξ)|+ exp(− |ξ|2δ
∫ t
0
b(τ )dτ)|u1(ξ)|.
This completes the proof. �
3.5. Gluing procedure. Now we have to glue the estimates from Proposi-tions 3.1, 3.3, 3.5 and 3.10. If we consider the set Mp := {ξ : |ξ| ≥ p}, then itis clear that an exponential type decay for the higher order energies follows fromProposition 3.1 under the usual regularity assumption for the data from the Cauchyproblem for σ-evolution models. Thus, the interesting case is to glue all estimatesfor small frequencies, say for {ξ : |ξ| ≤ p}, where p is sufficiently small. In thiscase, all the zones restricted to small frequencies are unbounded.
Lemma 3.12. In the pseudo-differential zone, the following hold :
|ξ|2δ∫ t0(|ξ|)
0
b(τ )dτ ≤ N, |ξ|2σ−2δ
∫ t0(|ξ|)
0
1
b(τ )dτ ≤ C.
Proof. By applying the definition of t0(|ξ|), we conclude
|ξ|2δ∫ t0(|ξ|)
0
b(τ )dτ ≤ |ξ|2δ(1 +
∫ t0(|ξ|)
0
b(τ )dτ)≤ N.

200 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
After taking into consideration assumption (A5), we have for the second term
|ξ|2σ−2δ
∫ t0(|ξ|)
0
1
b(τ )dτ ≤ C|ξ|2σ−2δ
∫ t0(|ξ|)
0
1 + τ
Λ1(τ )dτ.
Taking into account the condition 1 + t ≤ CΛ1(t)α from our assumption (A6) and
the definition of Zpd(ε,N), we get
∫ t0(|ξ|)
0
|ξ|2σ−2δ
b(τ )dτ ' |ξ|2σ−2δ
∫ t0(|ξ|)
0
Λ1(τ )α−1dτ ' N |ξ|2σ−2δα
∫ t0(|ξ|)
0
dτ
' |ξ|2σ−2δαΛ1(t0(|ξ|))α ' |ξ|2σ−4δα ' 1.
This is what we wanted to prove. �
Due to this statement, we can extend the integrals in the phases from Proposi-tion 3.5 from t0(|ξ|) to 0. Now we have to glue the estimates from Proposition 3.10for t = t0(|ξ|) and from Proposition 3.5 and Lemma 3.12.
Corollary 3.13. The following estimates hold for all t ∈ [t0(|ξ|), t1(|ξ|)] :
|ξ|β |u(t, ξ)| ' exp(− C|ξ|2σ−2δ
∫ t
0
1
b(τ )dτ
)(|ξ|β|u0(ξ)|+ |ξ|β−2δα|u1(ξ)|
)for β ≥ σ,
|ξ|β |ut(t, ξ)|
' exp(− C|ξ|2σ−2δ
∫ t
0
1
b(τ )dτ
) |ξ|β+2σ−2δ
b(t)
(|u0(ξ)|+ |ξ|−2δα|u1(ξ)|
)+exp
(− |ξ|2δ
∫ t
0
b(τ )dτ)(|ξ|β+2σ−2δα|u0(ξ)|+ |ξ|β|u1(ξ)|
)for β ≥ 0.
Gluing the estimates from Propositions 3.1 and 3.3, we obtain the following :
Corollary 3.14. The following estimates hold for all t ∈ [t1(|ξ|),∞) :
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β|u(t1(|ξ|), ξ)|
+ |ξ|β−σ|ut(t1(|ξ|), ξ)|)
for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β+σ|u(t1(|ξ|), ξ)|
+ |ξ|β|ut(t1(|ξ|), ξ)|)
for β ≥ 0.
Finally, we have to glue the estimates from Corollary 3.13 for t = t1(|ξ|) andCorollary 3.14.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 201
Corollary 3.15. The following estimates hold for small |ξ| and for all t ∈[t1(|ξ|),∞) :
|ξ|β|u(t, ξ)| ' exp(− C|ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)×(|ξ|β|u0(ξ)|+ |ξ|β−2δα|u1(ξ)|
)+ exp
(− |ξ|2δ
4
∫ t
0
b(τ )dτ)
×(|ξ|β+σ−2δα|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
)for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− C|ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)×(|ξ|β+σ|u0(ξ)|+ |ξ|β+σ−2δα|u1(ξ)|
)+ exp
(− |ξ|2δ
4
∫ t
0
b(τ )dτ)
×(|ξ|β+2σ−2δα|u0(ξ)|+ |ξ|β|u1(ξ)|
)for β ≥ 0.
3.6. Conclusions. For large frequencies, we may use the estimates from Propo-sition 3.1. They imply an exponential type decay. We will show this in the followingstatement.
Corollary 3.16. For large frequencies |ξ| ≥ p, the following estimates holdfor all t ∈ [0,∞) :
|ξ|β|u(t, ξ)| ' exp(− C(1 + t)
1α
)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
)for β ≥ 0,
|ξ|β|ut(t, ξ)| ' exp(− C(1 + t)
1α
)(|ξ|β+σ|u0(ξ)|+ |ξ|β|u1(ξ)|
)for β ≥ 0.
Proof. We use∫ t
0b(τ )dτ ∼ 1 +
∫ t
0b(τ )dτ for large t. Thus, we get for large
time t the estimate
|ξ|β|u(t, ξ)| ' exp(− CΛ1(t)
)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
).
The inequality 1 + t ≤ Λ1(t)α from our condition (A6) gives
|ξ|β|u(t, ξ)| ' exp(− C(1 + t)
1α
)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
).
In the same way, we obtain
|ξ|β|ut(t, ξ)| ' exp(− CΛ1(t)
)(|ξ|β+σ|u0(ξ)|+ |ξ|β |u1(ξ)|
)' exp
(− C(1 + t)
1α
)(|ξ|β+σ|u0(ξ)|+ |ξ|β|u1(ξ)|
).
Both estimates yield the exponential type decay. �
Therefore, we restrict ourselves to small frequencies. To derive the correspond-ing energy estimates from Corollary 3.15, we shall estimate the term
Sr(t, |ξ|) := |ξ|r exp(− C0|ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
).
This term explains the competition of influences from different phase functions.
Lemma 3.17. If the constant C0 is sufficiently small, then for all r ≥ 0 we have
Sr(t, |ξ|) ' maxξ∈Rn
{|ξ|r exp
(− C0|ξ|2σ−2δ
∫ t
0
1
b(τ )dτ
)}'
(1 +
∫ t
0
1
b(τ )dτ
)− r2σ−2δ
.

202 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Proof. First we show that the first partial derivative ∂|ξ|Sr(t, |ξ|) is negativefor |ξ| ≤ εr. For this reason, we calculate
∂|ξ|Sr(t, |ξ|) = Sr(t, |ξ|)( r
|ξ| − C0(2σ − 2δ)|ξ|2σ−2δ−1
∫ t1(|ξ|)
0
1
b(τ )dτ
−C0|ξ|2σ−2δ
b(t1(|ξ|))d|ξ|t1(|ξ|)−
2δ
4|ξ|2δ−1
∫ t
t1(|ξ|)b(τ )dτ +
1
4|ξ|2δb(t1(|ξ|))d|ξ|t1(|ξ|)
)≤ Sr(t, |ξ|)
( r
|ξ| +(14|ξ|2δb(t1(|ξ|))− C0|ξ|2σ−2δ 1
b(t1(|ξ|)))d|ξ|t1(|ξ|)
).
From
|ξ|2δb(t1(|ξ|)) = 2(1 + ε)|ξ|σ, |ξ|2σ−2δ 1
b(t1(|ξ|))=
1
2(1 + ε)|ξ|σ
and after choosing the constant C0 sufficiently small, we see that the term |ξ|2δb(t1(|ξ|))dominates the term C0|ξ|2σ−2δ 1
b(t1(|ξ|)) . After differentiation, we get
d|ξ|t1(|ξ|)b′(t1(|ξ|))|ξ|2δ−σ + (2δ − σ)|ξ|2δ−σ−1b(t1(|ξ|)) = 0,
d|ξ|t1(|ξ|) =(σ − 2δ)b(t1(|ξ|))|ξ|2δ−σ−1
b′(t1(|ξ|))|ξ|2δ−σ,
respectively. Using the assumption − b′(t)b(t) ≤ C b(t)
Λ1(t)from (A5) implies
d|ξ|t1(|ξ|) ≤ −(σ − 2δ)Λ1(t1(|ξ|))|ξ|2δ−σ−1
Cb(t1(|ξ|))|ξ|2δ−σ.
The increasing behavior of the function Λ1(t) and the definitions of t0(|ξ|) andt1(|ξ|) give
d|ξ|t1(|ξ|) ≤ −1
C(σ − 2δ)|ξ|2δ−σ−1Λ1(t0(|ξ|)) ≤ −
1
C(σ − 2δ)N |ξ|−1−σ.
Moreover, for a fixed r, the term r|ξ| is dominated by the negative term
1
4|ξ|2δb(t1(|ξ|))d|ξ|t1(|ξ|) ≤ −
1
C(σ − 2δ)N |ξ|−1
if we choose N large enough. In order to complete the proof, it is sufficient tostudy small frequencies with |ξ| ≤ εr. For |ξ| ≥ εr, we have an exponential typedecay from the hyperbolic zone. Let us now fix t > 0. Then the above term takes
its maximum for the ˜|ξ| satisfying t = t1( ˜|ξ|). For t = t1( ˜|ξ|), the second integralvanishes in Sr(t, |ξ|). Consequently,
Sr(t, |ξ|) ≤ Sr(t1( ˜|ξ|), ˜|ξ|) = ˜|ξ|rexp
(− C ˜|ξ|
2σ−2δ∫ t1( ˜|ξ|)
0
1
b(τ )dτ
)' max
ξ∈Rn
{|ξ|r exp
(− C|ξ|2σ−2δ
∫ t
0
1
b(τ )dτ
)}'
(1 +
∫ t
0
1
b(τ )dτ
)− r2σ−2δ
.
The lemma is proved. �
By Corollary 3.15, Lemma 3.17 and Proposition 3.10, we obtain the following :

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 203
Corollary 3.18. The following estimates hold for small |ξ| and for all t ∈[0,∞) :
|ξ|β|u(t, ξ)| ' Λ2(t)− β
2σ−2δ |u0(ξ)|+ Λ2(t)−β−2δα
2σ−2δ |u1(ξ)|
+ Λ1(t)−β+σ−2δα
2δ |u0(ξ)|+ Λ1(t)−β−σ
2δ |u1(ξ)| for β ≥ σ,
|ξ|β|ut(t, ξ)| ' Λ2(t)− β+σ
2σ−2δ |u0(ξ)|+ Λ2(t)−β+σ−2δα
2σ−2δ |u1(ξ)|
+ Λ1(t)−β+2σ−2δα
2δ |u0(ξ)|+ Λ1(t)− β
2δ |u1(ξ)| for β ≥ 0,
where Λ1(t) = 1 +∫ t
0b(s)ds and Λ2(t) = 1 +
∫ t
01
b(s)ds.
3.7. Energy estimates. Taking into consideration Corollary 3.16 with theexponential type decay estimate and higher order of regularity coming fromlarge frequencies, Proposition 3.10, Corollary 3.13 and Corollary 3.18 which givespotential type decay estimates for small frequencies leads to the followingtheorem. Here one has to pay attention that the estimates from Proposition 3.10are dominated by the estimates of Corollaries 3.13 and 3.18.
Theorem 3.19. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2),where the coefficient b = b(t) satisfies the conditions (A1) to (A6). Additionally,lim supt→∞(1+t)Λ1(t)
− σ2δ = 0. Then the solution u = u(t, x) satisfies the following
estimates for the energies of higher order :
‖|D|βu(t, ·)‖2L2 ' max{Λ1(t)
−β+σ−2δαδ ,Λ2(t)
− βσ−δ
}‖u0‖2Hβ
+max{Λ1(t)
−β−σδ ,Λ2(t)
−β−2δασ−δ
}‖u1‖2Hβ−σ for β ≥ σ,
‖|D|βut(t, ·)‖2L2 ' max{Λ1(t)
−β+2σ−2δαδ ,Λ2(t)
−β+σσ−δ
}‖u0‖2Hβ+σ
+max{Λ1(t)
−βδ ,Λ2(t)
−β+σ−2δασ−δ
}‖u1‖2Hβ for β ≥ 0.
Remark 3.3. The estimates for the energies of higher order show the paraboliceffect for the solutions to the Cauchy problem (1). The maximum of two decayfunctions in the estimates explains that we have in general no decay behavior ofthe classical elastic energy ‖|D|βu(t, ·)‖2L2 for β = σ and of the classical kineticenergy ‖ut(t, ·)‖2L2 .
Remark 3.4. If we set formally σ = 1 and b(t) = (1 + t)−γ , γ ∈ (0, 1 − 2δ),in the estimates from Theorem 3.19, then α = 1
1−γ , and we get the estimates from
Theorem 3.1 in [7].
4. Treatment for lim supt→∞(1 + t)Λ1(t)− σ
2δ =∞In this case, the extended phase space is divided into the hyperbolic zone
Zhyp(ε), the reduced zone Zred(ε) and the pseudo-differential zone Zpd(ε,N). Theelliptic zone is a compact set for small frequencies and only the hyperbolic zoneappears for large frequencies.
4.1. Treatment in the hyperbolic and reduced zone.
Proposition 4.1. The following estimates hold for all t ∈ [t1(|ξ|),∞), wheret1(|ξ|) = 0 for large frequencies :

204 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β|u(t1(|ξ|), ξ)|
+ |ξ|β−σ|ut(t1(|ξ|), ξ)|)
for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
2
∫ t
t1(|ξ|)b(τ )dτ
)(|ξ|β+σ|u(t1(|ξ|), ξ)|
+ |ξ|β|ut(t1(|ξ|), ξ)|)
for β ≥ 0.
Proof. The proof is the same as the proof of Propositions 3.1 and 3.3 and bythe gluing procedure, we get the desired statement. �
4.2. Treatment in the pseudo-differential zone. Now let us discuss thebehavior of the solution in the pseudo-differential zone
Zpd(ε,N) ={(t, ξ) :
b(t)
2|ξ|2δ−σ ≥ 1 + ε and Λ1(t)|ξ|2δ ≤ N
}.
The separating line between the reduced zone and the elliptic zone from Section 2.1
is defined by b(t)2 |ξ|2δ−σ = 1+ε. The separating line between the pseudo-differential
zone and the exterior of the pseudo-differential zone is defined by Λ1(t)|ξ|2δ = N .If lim supt→∞(1 + t)Λ1(t)
− σ2δ =∞, then for large time t ≥ C & 1 the elliptic zone
Zell(ε,N) is contained in the pseudo-differential zone Zpd(ε,N). For this reason,it is allowed to continue the integrals in the phases from Proposition 4.1 becausedue to Lemma 3.12 phases have only a contribution to amplitudes in this zone.Moreover, the phase coming from the reduced zone dominates that one comingfrom the hyperbolic zone.
Proposition 4.2. The following estimates hold for all t ∈ [0, t1(|ξ|)] :
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
0
b(τ )dτ)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
)for β ≥ σ,
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
0
b(τ )dτ)(|ξ|β+σ|u0(ξ)|+ |ξ|β|u1(ξ)|
)for β ≥ 0.
Proof. We introduce the micro-energy
U(t, ξ) :=(|ξ|σu(t, ξ), Dtu(t, ξ)
)Tfor all t ∈ [0, t1(|ξ|)].
We obtain from (1) the system of first order
DtU(t, ξ) = A(t, ξ)U(t, ξ),
where
(10) A(t, ξ) :=
(0 |ξ|σ|ξ|σ ib(t)|ξ|2δ
).
Therefore, we get that the entries of the matrix A(t, ξ) are uniformly integrable overthe pseudo-differential zone Zpd(ε,N). We can write U(t, ξ) = E(t, 0, ξ)U(0, ξ),where E(t, s, ξ) is the fundamental solution, that is, the solution to the system
DtE(t, s, ξ) = A(t, ξ)E(t, s, ξ), E(s, s, ξ) = I2, t ≥ s, (s, ξ), (t, ξ) ∈ Zpd(ε,N).

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 205
Then we get
‖E(t, 0, ξ)‖ ≤ exp(∫ t0(|ξ|)
0
‖A(τ, ξ)‖dτ)≤ C.
Finally, we obtain the following estimate for the transformed micro-energy U(t, ξ)in the pseudo-differential zone:
|ξ|β|u(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
0
b(τ )dτ)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
).
In the same way, we conclude for β ≥ 0 the a priori estimates
|ξ|β|ut(t, ξ)| ' exp(− |ξ|2δ
4
∫ t
0
b(τ )dτ)(|ξ|β+σ|u0(ξ)|+ |ξ|β|u1(ξ)|
).
All desired estimates are proved. �
4.3. Conclusion. Using the Propositions 4.1 to 4.2, we obtain the followingresult.
Corollary 4.3. The following estimates hold for small frequencies and for allt ∈ [0,∞) :
|ξ|β|u(t, ξ)| '(1 +
∫ t
0
b(τ )dτ)− β
2δ |u0(ξ)|+(1 +
∫ t
0
b(τ )dτ)−β−σ
2δ |u1(ξ)|
for β ≥ σ,
|ξ|β|ut(t, ξ)| '(1 +
∫ t
0
b(τ )dτ)− β+σ
2δ |u0(ξ)|+(1 +
∫ t
0
b(τ )dτ)− β
2δ |u1(ξ)|
for β ≥ 0.
For large frequencies, we may use the estimates from Proposition 4.1 becauseof t2(|ξ|) = 0. In this part of the extended phase space, we conclude an exponentialtype decay.
Corollary 4.4. The following estimates hold for large frequencies and for allt ∈ [0,∞) :
|ξ|β |u(t, ξ)| ' exp(− CΛ1(t)
)(|ξ|β|u0(ξ)|+ |ξ|β−σ|u1(ξ)|
)for β ≥ 0,
|ξ|β |ut(t, ξ)| ' exp(− CΛ1(t)
)(|ξ|β+σ|u0(ξ)|+ |ξ|β|u1(ξ)|
)for β ≥ 0.
4.4. Energy estimates. Applying Corollaries 4.3 and 4.4, we obtain the fol-lowing result.
Theorem 4.5. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2) underthe assumption limt→∞(1+ t)Λ1(t)
− σ2δ =∞, where the coefficient b = b(t) satisfies
additionally the conditions (A1) to (A5). Then the solution u = u(t, x) satisfies thefollowing estimates for the energies of higher order :
‖|D|βu(t, ·)‖2L2 ' Λ1(t)−β
δ ‖u0‖2Hβ + Λ1(t)−β−σ
δ ‖u1‖2Hβ−σ
for β ≥ σ,
‖|D|βut(t, ·)‖2L2 ' Λ1(t)−β+σ
δ ‖u0‖2Hβ+σ + Λ1(t)−β
δ ‖u1‖2Hβ
for β ≥ 0.

206 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Remark 4.1. If we set formally σ = 1 and b(t) = (1 + t)−γ , γ ∈ [1 − 2δ, 1],in the estimates from Theorem 4.5, then we get the estimates from Theorem 3.2in [7].
5. Results for the case δ ∈ [σ2 , σ)
In principle, we are able to follow the same approach. But there is a differencein the structure of the zones. If we consider |ξ| sufficiently small, then (t, ξ) belongsto the hyperbolic zone. If we consider |ξ| sufficiently large, then (t, ξ) belongs toone of the other three zones. Moreover, the pseudo-differential zone degenerates toa compact set. For this reason, we have only to study the behavior of solutions inthe hyperbolic zone, the reduced zone and the elliptic zone. By using Proposition3.1 – Proposition 3.5 and by using gluing procedure for large frequencies, we getthe following result for the case δ ∈ [σ/2, σ) :
Theorem 5.1. Let us consider the Cauchy problem ( 1) for δ ∈ (σ/2, σ), wherethe coefficient b = b(t) satisfies the conditions (A1) to (A5). Then the solutionu = u(t, x) satisfies the following estimates for the energies of higher order :
‖|D|βu(t, ·)‖2L2 ' Λ1(t)−β
δ ‖u0‖2Hβ + Λ1(t)−β−σ
δ ‖u1‖2Hβ−σ
for β ≥ σ,
‖|D|βut(t, ·)‖2L2 ' Λ1(t)−β+σ
δ ‖u0‖2Hβ+σ + Λ1(t)−β
δ ‖u1‖2Hβ
for β ≥ 0.
Remark 5.1. If we set formally σ = 1 and b(t) = (1 + t)−γ , γ ∈ (0, 1], in theestimates from Theorem 5.1, then we get the estimates from Theorem 4.1 in [7].
6. Lp − Lq estimates on the conjugate line
In this case, we derive Lp −Lq decay estimates for the energies of higher orderon the conjugate line. These estimates rely on more structural properties of repre-sentations of solutions. Let us explain our strategy. By using techniques for Fouriermultipliers, we obtain L1 − L∞ estimates; and to conclude general statements, weshall apply the Riesz-Thorin interpolation theorem to interpolate the L1−L∞ andL2 − L2 estimates.
Lemma 6.1. The following estimates hold for β ≥ 0 and for large time t :∥∥∥|ξ|β exp(− |ξ|2δ
∫ t
0
b(τ )dτ)∥∥∥
L1'
(1 +
∫ t
0
b(τ )dτ)− β
2δ−n2δ
.
Proof. The proof follows from∥∥∥|ξ|β exp(− |ξ|2δ
∫ t
0
b(τ )dτ)∥∥∥
L1'
∫ ∞
0
|ξ|β+n−1 exp(− |ξ|2δ
∫ t
0
b(τ )dτ)d|ξ|
'(∫ t
0
b(τ )dτ)−β+n
2δ
∫ ∞
0
ηβ+n2δ −1 exp
(− η
)dη,
after setting η = |ξ|2δ∫ t
0b(τ )dτ with dη = 2δ|ξ|2δ−1
( ∫ t
0b(τ )dτ
)d|ξ|. �
Remark 6.1. If we estimate ‖ exp(− |ξ|2δ
2
∫ t
0b(τ )dτ
)|ξ|β‖L1 , then this brings
a coefficient like (∫ t
0
b(τ )dτ)− β
2δ−n2δ
.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 207
This coefficient becomes singular for t→ +0. For this reason, we will often distin-guish in the further considerations between the two cases t ∈ (0, 1] and t ∈ [1,∞).
6.1. Treatment for lim supt→∞(1 + t)Λ1(t)− σ
2δ = 0.6.1.1. L1 − L∞ estimates.Large frequencies. The part of the extended phase space {(t, ξ) ∈ [0,∞)×{|ξ| ≥
C1}}, where C1 is sufficiently large, belongs to the hyperbolic zone.
Proposition 6.2. The following estimates hold for large frequencies and allt ≥ 0 : ∫
Rn
|ξ|β|u(t, ξ)|χ{|ξ|≥C1}dξ
' exp(− C
∫ t
0
b(τ )dτ)(‖u0‖Hβ+m,1 + ‖u1‖Hβ−σ+m,1
)for m > n, β ≥ σ,∫
Rn
|ξ|β|ut(t, ξ)|χ{|ξ|≥C1}dξ
' exp(− C
∫ t
0
b(τ )dτ)(‖u0‖Hβ+σ+m,1 + ‖u1‖Hβ+m,1
)for m > n, β ≥ 0.
Proof. Elastic energy. From Proposition 3.1, we derive∫Rn
|ξ|β|u(t, ξ)|χ{|ξ|≥C1}dξ ' exp(− C
∫ t
0
b(τ )dτ)(
supξ∈Rn
〈ξ〉β+m|u0(ξ)|
+ supξ∈Rn
〈ξ〉β−σ+m|u1(ξ)|)∫
Rn
1
〈ξ〉m dξ for β ≥ σ.
Applying an L1 − L∞ property of Fourier multipliers and m > n, we have∫Rn
|ξ|β|u(t, ξ)|χ{|ξ|≥C1}dξ
' exp(− C
∫ t
0
b(τ )dτ)(|u0‖Hβ+m,1 + ‖u1‖Hβ−σ+m,1
)for m > n, β ≥ σ.
This implies an “exponential type decay”.
Kinetic energy. As for the elastic energy after applying Proposition 3.1, wehave∫
Rn
|ξ|β|ut(t, ξ)|χ{|ξ|≥C1}dξ ' exp(− C
∫ t
0
b(τ )dτ)(
supξ∈Rn
〈ξ〉β+σ+m|u0(ξ)|
+ supξ∈Rn
〈ξ〉β+m|u1(ξ)|)∫
Rn
1
〈ξ〉m dξ for β ≥ σ.
Applying an L1 − L∞ property of Fourier multipliers and m > n, we arrive at∫Rn
|ξ|β|ut(t, ξ)|χ{|ξ|≥C1}dξ
' exp(− C
∫ t
0
b(τ )dτ)(|u0‖Hβ+σ+m,1 + ‖u1‖Hβ+m,1
)for m > n, β ≥ σ.
This gives an “exponential type decay” and completes the proof. �

208 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Small frequencies. The part of the extended phase space {(t, ξ) ∈ [0,∞)×{|ξ| ≤C2}} is divided into parts of the hyperbolic zone Zhyp(ε), the reduced zone Zred(ε),the elliptic zone Zell(ε,N), and the pseudo-differential zone Zpd(ε,N). Here wechoose the constant C2 sufficiently small.
Case 1: t ∈ [0, t0(|ξ|)].In this case, we may restrict ourselves to the pseudo-differential zone. By taking
into consideration that the phase function −|ξ|2δ∫ t
0b(τ )dτ has only a contribution
to the amplitude in the pseudo-differential zone and using the formulas (8) and (9),we have the following result for t ∈ (0, t0(|ξ|)] :
Proposition 6.3. The following estimates hold for small frequencies in thecase t ∈ (0, t0(|ξ|)] :
∫Rn
|ξ|β|u(t, ξ)|χ{pd}∩{|ξ|≤C2}(t, ξ)dξ ' Λ1(t)− β
2δ−n2δ ‖u0‖L1
+ Λ1(t)−β−2δα
2δ − n2δ ‖u1‖L1 for β ≥ σ,∫
Rn
|ξ|β|ut(t, ξ)|χ{pd}∩{|ξ|≤C2}(t, ξ)dξ ' Λ1(t)−β+2σ−2δα
2δ − n2δ ‖u0‖L1
+ Λ1(t)− β
2δ−n2δ ‖u1‖L1 for β ≥ 0.
Case 2: t ∈ [t0(|ξ|), t1(|ξ|)].By using Corollary 3.13, Lemma 6.1 and applying an L1 −L∞ property of Fouriermultipliers, we get
Proposition 6.4. The following estimates hold for small frequencies in thecase t ∈ [t0(|ξ|), t1(|ξ|)] :
∫Rn
|ξ|β|u(t,ξ)|χ{ell∪pd}∩{|ξ|≤C2}(t, ξ)dξ ' Λ2(t)− β
2σ−2δ−n
2σ−2δ ‖u0‖L1
+ Λ2(t)−β−2δα
2σ−2δ − n2σ−2δ ‖u1‖L1 for β ≥ σ,∫
Rn
|ξ|β|ut(t, ξ)|χ{ell∪pd}∩{|ξ|≤C2}(t, ξ)dξ
' max{Λ2(t)
− β+σ2σ−2δ−
n2σ−2δ ,Λ1(t)
−β+2σ−2δα2δ − n
2δ
}‖u0‖L1
+max{Λ2(t)
−β+σ−2δα2σ−2δ − n
2σ−2δ ,Λ1(t)− β
2δ−n2δ
}‖u1‖L1 for β ≥ 0.
Case 3: t ∈ [t1(|ξ|),∞).By applying Corollary 3.15, Lemma 6.1, Lemma 3.17 and an L1 − L∞ property ofFourier multipliers, we have the following proposition.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 209
Proposition 6.5. The following estimates hold for small frequencies in thecase t ∈ [t1(|ξ|),∞) :∫
Rn
|ξ|β|u(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ
' max{Λ2(t)
− β2σ−2δ−
n2σ−2δ ,Λ1(t)
−β+σ−2δα2δ − n
2δ
}‖u0‖L1
+max{Λ2(t)
−β−2δα2σ−2δ − n
2σ−2δ ,Λ1(t)−β−σ
2δ − n2δ
}‖u1‖L1 for β ≥ σ,∫
Rn
|ξ|β|ut(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ
' max{Λ2(t)
− β+σ2σ−2δ−
n2σ−2δ ,Λ1(t)
−β+2σ−2δα2δ − n
2δ
}‖u0‖L1
+max{Λ2(t)
−β+σ−2δα2σ−2δ − n
2σ−2δ ,Λ1(t)− β
2δ−n2δ
}‖u1‖L1 for β ≥ 0.
Proof. We prove this statement only for large times because for small timesthe admissible set is a compact set in the extended phase space. We use the gluingprocedure from the pseudo-differential zone to the elliptic zone, the reduced zoneand the hyperbolic zone. Therefore we apply Corollary 3.15 for all t ∈ [t1(|ξ|),∞) :Elastic energy.Large times. From Corollary 3.15, it follows∫
Rn
|ξ|β|u(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ ' supξ∈Rn
∣∣∣〈ξ〉β+m
× exp(− |ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)∣∣∣×‖u0‖L∞
∫Rn
1
〈ξ〉m dξ +∥∥∥〈ξ〉β+σ−2δα exp
(− |ξ|2δ
4
∫ t
0
b(τ )dτ)∥∥∥
L1
×‖u0‖L∞ + supξ∈Rn
∣∣∣〈ξ〉β−2δα+m exp(− |ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)× exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)∣∣∣ ‖u1‖L∞
∫Rn
1
〈ξ〉m dξ
+∥∥∥〈ξ〉β−σ exp
(− |ξ|2δ
4
∫ t
0
b(τ )dτ)∥∥∥
L1‖u1‖L∞ .
Applying Lemma 6.1, Lemma 3.17, m > n and an L1 − L∞ property of Fouriermultipliers the last inequality implies∫
Rn
|ξ|β|u(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ
' max{Λ1(t)
−β+σ−2δα2δ − n
2δ ,Λ2(t)− β
2σ−2δ−n
2σ−2δ
}‖u0‖L1
+max{Λ1(t)
−β−σ2δ − n
2δ ,Λ2(t)−β−2δα
2σ−2δ − n2σ−2δ
}‖u1‖L1 .
This gives a “potential type decay”.

210 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Kinetic energy.Large times. We use again Corollary 3.15 and conclude∫
Rn
|ξ|β|ut(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ ' supξ∈Rn
∣∣∣〈ξ〉β+σ+m
× exp(− |ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)∣∣∣× ‖u0‖L∞
∫Rn
1
〈ξ〉m dξ +∥∥∥〈ξ〉β+2σ−2δα exp
(− |ξ|2δ
4
∫ t
0
b(τ )dτ)∥∥∥
L1
× ‖u0‖L∞ + supξ∈Rn
∣∣∣〈ξ〉β+σ−2δα+m exp(− |ξ|2σ−2δ
∫ t1(|ξ|)
0
1
b(τ )dτ
)× exp
(− |ξ|2δ
4
∫ t
t1(|ξ|)b(τ )dτ
)∣∣∣‖u1‖L∞
∫Rn
1
〈ξ〉m dξ
+∥∥∥〈ξ〉β exp(
− |ξ|2δ4
∫ t
0
b(τ )dτ)∥∥∥
L1‖u1‖L∞ .
Applying Lemma 6.1, Lemma 3.17, m > n and an L1 − L∞ property of Fouriermultipliers, the last inequality implies∫
Rn
|ξ|β|ut(t, ξ)|χ{red∪hyp}∩{|ξ|≤C2}(t, ξ)dξ
' max{Λ1(t)
−β+2σ−2δα2δ − n
2δ ,Λ2(t)− β+σ
2σ−2δ−n
2σ−2δ
}‖u0‖L1
+max{Λ1(t)
− β2δ−
n2δ ,Λ2(t)
−β+σ−2δα2σ−2δ − n
2σ−2δ
}‖u1‖L1 .
This brings a “potential type decay” and the proposition is proved. �Conclusions. Taking into consideration Proposition 6.2 with the exponential
type decay estimate and higher order regularity of data from the behavior of largefrequencies, Propositions 6.3 to 6.5 with potential type decay estimates for smallfrequencies, we may conclude that the decay from Proposition 6.5 is slower thanthe decay from Propositions 6.3 and 6.4. Therefore, we obtain the desired L1−L∞
estimates for the energies of higher order of solutions to the Cauchy problem (1)for δ ∈ (0, σ/2) and in the case lim supt→∞(1 + t)Λ1(t)
− σ2δ = 0.
Theorem 6.6. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2), whereb = b(t) satisfies the assumptions (A1) to (A6) and lim supt→∞(1+t)Λ1(t)
− σ2δ = 0.
Then the energies of higher order of the solutions u = u(t, x) satisfy the followingL1 − L∞ decay estimates:
‖|D|βu(t, ·)‖L∞ ' max{Λ1(t)
−β+σ−2δα2δ − n
2δ ,Λ2(t)− β
2σ−2δ−n
2σ−2δ
}‖u0‖Hβ+m,1
+max{Λ1(t)
−β−σ2δ − n
2δ ,Λ2(t)−β−2δα
2σ−2δ − n2σ−2δ
}‖u1‖Hβ−σ+m,1 for m > n, β ≥ σ,
‖|D|βut(t, ·)‖L∞ ' max{Λ1(t)
−β+2σ−2δα2δ − n
2δ ,Λ2(t)− β+σ
2σ−2δ−n
2σ−2δ
}‖u0‖Hβ+σ+m,1
+max{Λ1(t)
− β2δ−
n2δ ,Λ2(t)
−β+σ−2δα2σ−2δ − n
2σ−2δ
}‖u1‖Hβ+m,1 for m > n, β ≥ 0.
Remark 6.2. We want to point out that in the above estimates the decaycomes from the WKB-representations of solutions for small frequencies and largetimes; the regularity comes from the large frequencies and from the small times.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 211
6.1.2. Interpolation. To get the desired Lp − Lq decay estimates on the con-jugate line, we apply the Riesz-Thorin interpolation theorem between the L2 − L2
estimates from Theorem 3.19 in Section 3.7 and L1 − L∞ estimates from Theo-rem 6.6.
Theorem 6.7. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2), whereb = b(t) satisfies the assumptions (A1) to (A6) and lim supt→∞(1+t)Λ1(t)
− σ2δ = 0.
Then the energies of higher order of the solutions u = u(t, x) satisfy the followingLp − Lq decay estimates on the conjugate line :
‖|D|βu(t, ·)‖Lq
' max{Λ1(t)
−β+σ−2δα2δ − n
2δ (1p−
1q ),Λ2(t)
− β2σ−2δ−
n2σ−2δ (
1p−
1q )}‖u0‖Hβ+Np,p
+max{Λ1(t)
−β−σ2δ − n
2δ (1p−
1q ),Λ2(t)
−β−2δα2σ−2δ − n
2σ−2δ (1p−
1q )}‖u1‖Hβ−σ+Np,p for β ≥ σ,
‖|D|βut(t, ·)‖Lq
' max{Λ1(t)
−β+2σ−2δα2δ − n
2δ (1p−
1q ),Λ2(t)
− β+σ2σ−2δ−
n2σ−2δ (
1p−
1q )}‖u0‖Hβ+σ+Np,p
+max{Λ1(t)
− β2δ−
n2δ (
1p−
1q ),Λ2(t)
−β+σ−2δα2σ−2δ − n
2σ−2δ (1p−
1q )}‖u1‖Hβ+Np,p for β ≥ 0,
where p ∈ [1, 2], pq = p+ q, and Np > n(1p −
1q
).
Remark 6.3. We have seen in Section 3 that our model of interest (1) possessesthe parabolic effect. The last result shows, moreover, that this model is paraboliclike from the point of view of Lp − Lq decay estimates on the conjugate line.
6.2. Treatment for lim supt→∞(1 + t)Λ1(t)− σ
2δ = ∞. Following the sameapproach, we are able to prove the following corresponding result to Theorem 6.7for the second case lim supt→∞(1 + t)Λ1(t)
− σ2δ =∞ :
Theorem 6.8. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2), whereb = b(t) satisfies the assumptions (A1) to (A6) and lim supt→∞(1+t)Λ1(t)
− σ2δ =∞.
Then the energies of higher order of the solution u = u(t, x) satisfy the followingLp − Lq decay estimates on the conjugate line :
‖|D|βu(t, ·)‖Lq ' Λ1(t)− β
2δ−n2δ (
1p−
1q )‖u0‖Hβ+Np,p
+Λ1(t)−β−σ
2δ − n2δ (
1p−
1q )‖u1‖Hβ−σ+Np,p for β ≥ σ,
‖|D|βut(t, ·)‖Lq ' Λ1(t)−β+σ
2δ − n2δ (
1p−
1q )‖u0‖Hβ+σ+Np,p
+Λ1(t)− β
2δ−n2δ (
1p−
1q )‖u1‖Hβ+Np,p for β ≥ 0,
where p ∈ [1, 2], pq = p+ q, and Np > n(1p −
1q
).
Following the same approach, we are able to prove the following correspondingresult to Theorem 6.7 for δ ∈ [σ/2, σ).
Theorem 6.9. Let us consider the Cauchy problem ( 1) for δ ∈ [σ/2, σ), whereb = b(t) satisfies the assumptions (A1) to (A5). Then the energies of higher orderof the solution u = u(t, x) satisfy the following Lp − Lq decay estimates on the

212 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
conjugate line :
‖|D|βu(t, ·)‖Lq ' Λ1(t)− β
2δ−n2δ (
1p−
1q )‖u0‖Hβ+Np,p
+ Λ1(t)−β−σ
2δ − n2δ (
1p−
1q )‖u1‖Hβ−σ+Np,p for β ≥ σ,
‖|D|βut(t, ·)‖Lq ' Λ1(t)−β+σ
2δ − n2δ (
1p−
1q )‖u0‖Hβ+σ+Np,p
+ Λ1(t)− β
2δ−n2δ (
1p−
1q )‖u1‖Hβ+Np,p for β ≥ 0,
where p ∈ [1, 2], pq = p+ q, and Np > n(1p −
1q
).
7. Smoothing properties
After the study of decay estimates for energies of higher order for solutionsto structurally damped σ−evolution models in Section 2 – Section 6, we consideranother important property, the so-called Gevrey smoothing property for solutionsto the Cauchy problem (1). We recall definitions of regularity in Gevrey spaces andGevrey-Sobolev spaces in the Appendix 10.2.
7.1. Treatment in the case δ ∈ (0, σ/2). In this section, we study thespecial case of (1) for δ ∈ (0, σ/2). Applying the partial Fourier transformationand the “dissipative” transformation to (1) leads to a Cauchy problem with mass
term m(t, ξ) = |ξ|2σ − b2(t)4 |ξ|4δ − b′(t)
2 |ξ|2δ, where the sign of the coefficient m =m(t, ξ) is positive for large frequencies. For this reason, we may restrict ourselvesto the hyperbolic zone Zhyp(ε). To derive the representation of solution for largefrequencies, we only need (A1) and (A2) as properties for the coefficient b = b(t). Byusing the explicit representation from Corollary 3.2 and the equivalence p(t, ξ) ∼|ξ|σ in Zhyp(ε), the solution u = u(t, ξ) satisfies the following estimate for largefrequencies : ∫
|ξ|≥M
exp(|ξ|2δ
∫ t
0
b(τ )dτ)〈ξ〉2σ|u(t, ξ)|2dξ
'∫|ξ|≥M
〈ξ〉2σ|u0(ξ)|2dξ +∫|ξ|≥M
|u1(ξ)|2dξ.
By Definition 10.3, we can conclude immediately the following statement :
Theorem 7.1. Let us consider the Cauchy problem ( 1) for δ ∈ (0, σ/2), whereb = b(t) satisfies the assumptions (A1) and (A2). For the data, we assume u0 ∈ Hσ
and u1 ∈ L2. Then the solution u(t, ·) belongs for all t > 0 to the Gevrey-Sobolev
space Γa(t), 12δ ,σ(Rn), where a(t) := 1
2
∫ t
0b(τ )dτ .
7.2. Treatment in the case δ ∈ [σ/2, σ). In this section, we study the specialcase of (1) for δ ∈ [σ/2, σ). Using the same procedure, we get that the mass termm = m(t, ξ) is negative for large frequencies. For this reason, for every fixed timet, we restrict our considerations to {ξ : |ξ| ≥ M(t)} with M(t) large. So we areallowed to restrict our considerations to the elliptic zone Zell(ε,N). To derive therepresentation of solution, we need assumptions (A1), (A2), (A4) and (A5) for thecoefficient b = b(t). By the treatment in the elliptic zone from Section 3.3, we getwith a suitable weight function w = w(t, ξ) the explicit representation of solution

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 213
from Corollary 3.9. The equivalence w(t, ξ) ∼ − |ξ|2σ−2δ
b(τ) in Zell(ε,N) implies that
the solution u = u(t, ξ) satisfies the following estimate for large frequencies :∫|ξ|≥M(t)
exp(2|ξ|2σ−2δ
∫ t
0
1
b(τ )dτ
)〈ξ〉2σ|u(t, ξ)|2dξ
'∫|ξ|≥M(t)
〈ξ〉2σ|u0(ξ)|2dξ +∫|ξ|≥M(t)
|u1(ξ)|2dξ.
By Definition 10.3 we can conclude immediately the following :
Theorem 7.2. Let us consider the Cauchy problem ( 1) for δ ∈ [σ/2, σ), whereb = b(t) satisfies the assumptions (A1), (A2), (A4) and (A5). For the data, weassume u0 ∈ Hσ and u1 ∈ L2. Then the solution u(t, ·) belongs for all t > 0 to the
Gevrey space Γ1
2σ−2δ (Rn).
8. Estimates for energies of higher order – Optimality
In this section, we study the scale-invariant models for the special case of (1)with b(t) := (1 + t)γ . By using Definition 10.4 from the Appendix, we find theparameter γ = 2δ−σ
σ such that the model becomes scale-invariant, that is, thefollowing model is of interest :
(11)utt + (−Δ)σu+ μ(1 + t)
2δ−σσ (−Δ)δut = 0,
u(0, x) = u0(x), ut(0, x) = u1(x), σ > 1, δ ∈ (0, σ/2).
By using the transformations
τ := (1 + t)|ξ|σ, u(t, ξ) := v((1 + t)|ξ|σ),(12)
the corresponding Cauchy problem is
(13)vττ (τ ) + μτ
2δ−σσ vτ (τ ) + v(τ ) = 0,
v(r) = v0(r), vτ (r) = v1(r), σ > 1, δ ∈ (0, σ/2].
To derive appropriate estimates, we shall choose N large such that N >(2/μ
) σ2δ−σ .
By applying a diagonalization procedure (see [8]) after the first step of diagonal-ization, the entries of the matrix R1(τ ) are uniformly integrable. We can writeV (1)(τ ) = E1(τ, s)V
(1)(s), where E1(τ, s) is the fundamental solution, that is thesolution to the system
(14) dτE1(τ, s) =(D(τ ) +R(τ )
)E1(τ, s), E1(s, s) = I2 for all s, τ ≥ r.
Straightforward calculations imply
‖E1(τ, s)‖ ≤ C for all s, τ ≥ r.
Finally, we obtain the following relation for the transformed micro-energyV = V (τ ) :
(15) V (τ ) = E(τ, r)V (r) for all τ ≥ r.
From the backward transformation, we arrive at the following statement for v(τ ) =
exp(− μ
2
∫ τ
0s
2δ−σσ ds
)v(τ ).

214 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Proposition 8.1. The following estimates hold for the solution to the Cauchyproblem ( 13) for τ ≥ r ≥ 0 :
|v(τ )| ' exp(− μ
2(τ
2δσ − r
2δσ )
)(|v0(r)|+ |v1(r)|
),
|vτ (τ )| ' exp(− μ
2(τ
2δσ − r
2δσ )
)(|v0(r)|+ |v1(r)|
).
8.1. Scattering results. Our goal is to show that the behavior of the solutionv(τ ) of (13) with Cauchy data (v0, v1) coincides asymptotically with the behaviorof the solution for some reference system with related data (v10 , v
11) in a special
sense. We will use the fact that the energy of the solution for that reference systemis preserved. The operator relating the data (v0, v1) to (v10 , v
11) will be denoted as
the Møller wave operator following the conventions from the scattering theory forwave equations. Now we define another reference system
(16) Vτ (τ ) =
(0 a(τ )
−a(τ ) 0
)V (τ ), V (r) = V0 for τ ≥ r.
Using the same procedure as before after a single step of diagonalization, we get
(17) V (τ ) = E(τ, s)V (s) for all s, τ ≥ r,
where
(18) E(τ, s) := NEd(τ, s)N−1 for all s, τ ≥ r.
The matrix-valued functions N and Ed = Ed(τ, s) coincide with those from above.We construct an operator mapping the Cauchy data V (r) = (a(r)v(r), vτ (r))
T from(13) to the Cauchy data V (r) = (a(r)v(r), vτ (r))
T to the reference system (16). Forthis reason, we introduce
W+(r) := limτ→∞
E−1(τ, r)E(τ, r) = limτ→∞
NEd(r, τ )E1(τ, r)N−1.
Taking into account
NEd(r, τ )E1(τ, r)N−1 = NQ(τ, r)N−1
brings
W+(r) := N limτ→∞
Q(τ, r)N−1.
To prove the existence of W+(r) as an operator from L(R2,R2), we show that{Q(τk, r)}k is a Cauchy sequence for all sequences {τk}k with τk → ∞. Let us fixa constant R large enough and τ, τ ′ ≥ R. We obtain
‖Q(τ, r)−Q(τ ′, r)‖
=∥∥∥ ∞∑
k=1
∫ τ
r
P (τ1, r)Jk(τ1, r)dτ1 −∫ τ ′
r
P (τ1, r)Jk(τ1, r)dτ1
∥∥∥=
∥∥∥ ∞∑k=1
∫ τ
τ ′P (τ1, r)Jk(τ1, r)dτ1
∥∥∥ ≤ exp(∫ τ
τ ′‖R(τ )‖dτ
)≤ ε(R)
uniformly for all τ, τ ′ ≥ R. Here we use the notations J1(τ1, s) := −1 and
Jk(τ1, s) =: (−1)k∫ τ1
s
P (τ2, s) · · ·∫ τk−1
s
P (τk, s)dτkdτk−1 · · · dτ2 for k ≥ 2.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 215
Consequently, the Møller wave operator W+(r) = N limτ→∞ Q(τ, r)N−1 exists inL(R2,R2). To complete the scattering, we examine the behavior of V and V bytaking the limit
limτ→∞
‖V (τ )− V (τ )‖ = limτ→∞
‖E(τ, r)V (r)− E(τ, r)V (r)‖
= limτ→∞
‖NE1(τ, r)N−1V (r)−NEd(τ, r)N−1W+(r)V (r)‖
= limτ→∞
‖NEd(τ, r)L(τ, r)N−1V (r)‖
with
L(τ, r) := Q(τ, r)− limτ ′→∞
Ed(r, τ′)E1(τ
′, r).
Due to the existence of W+(r), we arrive at limτ→∞ L(τ, r) = 0 uniformly. ByDefinition 10.5, we can conclude immediately the following :
Theorem 8.2. Let us consider the Cauchy problem ( 11) in the case δ ∈(0, σ/2). Then the solution u = u(t, x) satisfies the following estimates for theenergies of higher order:
Eβ[u](t) ' (1 + t)−2 β+σσ ‖u0‖2Hβ+σ + (1 + t)−2 β
σ ‖u1‖2Hβ .
Remark 8.1. This result coincides with the estimates for Eβ[u](t) in the caseof decreasing dissipation from Theorem 4.5. Furthermore, we can see that for thescale-invariant models the decay functions appearing in the estimates for Eβ[u](t)are independent of the parameters μ, δ.
9. Concluding remarks and open problem
In the future, we shall study Cauchy problems of the form
(19)utt + a2(t)(−Δ)σu+ b(t)(−Δ)δut = f(u, ut,∇u), (t, x) ∈ (0,∞)× Rn,
u(0, x) = u0(x), ut(0, x) = u1(x), σ > 1, δ ∈ (0, σ].
(1) We are interested to find an approach for the linear Cauchy problem whichallows to study above models with propagation speed a(t) having a mono-tonic behavior. Here the main question is that for the influence of theinterplay between a2(t) and b(t). The case σ = 1 and δ = 0 is studied inthe papers [2] and [1].
(2) In a forthcoming project, we shall study the existence of a critical exponentfor global existence of small data solutions for semi-linear models (19) withdifferent model source terms having power nonlinearities. An effective toolis Lp−Lq estimates away from the conjugate line (see [10] or [8]). Preciseestimates for the corresponding linear model allow to prove by fixed pointmethods local (in time) solutions and global (in time) small data solutionsas well. Finally, the optimality of a critical exponent should be explained.The case σ = 1 and δ = 0 is studied in [1]. The case σ = 1, δ ∈ (0, σ],a(t) ≡ 1 and b(t) ≡ μ > 0 is studied in [4].
10. Appendix
10.1. Symbol classes in the elliptic zone. Let us define the followingclasses of symbols related to the properties of b = b(t), the diagonalization pro-cedure and WKB-analysis in Zell(ε,N) as well.

216 MOHAMED KAINANE MEZADEK AND MICHAEL REISSIG
Definition 10.1. We introduce the following symbol classes with limitedsmoothness :
Sl,mell {m1,m2,m3} :=
{a(t, ξ) ∈ Cl
((0, T ];Cm(Zell(ε,N))
):
|∂kt ∂
αξ a(t, ξ)| ≤ Ck,α|ξ|m1−|α|b(t)m2
( 1
1 + t
)m3+k
for all non-negative integers k, |α| such that k ≤ l, |α| ≤ m}.
Lemma 10.1. The family of symbol classes Sl,mell {m1,m2,m3} generates a hier-
archy of symbol classes having the following properties :
• Sl,mell {m1,m2,m3} ⊂ Sl,m
ell {m1 + 2kδ,m2 + k,m3 − k} for k ≥ 0,
• Sl,mell {m1,m2 + k,m3} ⊂ Sl,m
ell {m1,m2,m3} for k ≥ 0,
• Sk1,p1
ell {m1,m2,m3} ⊂ Sk2,p2
ell {m1,m2,m3} for k2 ≤ k1 or p2 ≤ p1,
• if a ∈ Sl,mell {m1,m2,m3} and b ∈ Sl,m
ell {k1, k2, k3}, then
ab ∈ Sl,mell {m1 + k1,m2 + k2,m3 + k3},
• if a ∈ Sl,mell {m1,m2,m3}, then ∂k
t a ∈ Sl−k,mell {m1,m2,m3 + k} and
∂αξ a ∈ S
l,m−|α|ell {m1 − p,m2,m3} for k ≤ l and p ≤ |α|.
10.2. Gevrey spaces.
Definition 10.2. A given function u : Rn → R belongs to the Gevrey spaceΓa,s(Rn), if and only if, there exist positive real constants a and s such that
Fx→ξ(u)(ξ) exp(a〈ξ〉 1
s
)∈ L2(Rn). Here Fx→ξ(u) denotes the Fourier transform
of u. We write u ∈ Γa,s(Rn). By Γs(Rn), we denote the inductive limit of all spacesΓa,s(Rn), that is, Γs(Rn) :=
⋃a>0 Γ
a,s(Rn).
More precisely, we can define the regularity of functions belonging to Gevrey-Sobolev spaces.
Definition 10.3. A given function u : Rn → R belongs to the Gevrey-Sobolevspace Γa,s,ρ(Rn) if and only if there exist positive constants a, s and a real constant
ρ ∈ R such that Fx→ξ(u)(ξ)〈ξ〉ρ exp(a〈ξ〉 1
s
)∈ L2(Rn). We write u ∈ Γa,s,ρ(Rn). By
Γs,σ(Rn), we denote the inductive limit of all spaces Γa,s,σ(Rn), that is, Γs,σ(Rn) :=⋃a>0 Γ
a,s,σ(Rn).
10.3. Scale-invariant models.
Definition 10.4. The differential equation from (11) becomes scale-invariantif there exist real parameters δ, γ and p such that u(1 + t, x) and u(1 + t∗, x∗) :=u(λ(1 + t), λpx) are solutions to the equation from (11) as well for λ �= 0.
Definition 10.5. The energy of higher order for solutions to (11) is definedfor β ≥ 0 by
(20) Eβ[u](t) := ‖|D|β+σu(t, ·)‖2L2 + ‖|D|βut(t, ·)‖2L2 .
References
[1] Bui Tang Bao Ngoc, Semi-linear waves with time-dependent speed and propagation, PhDthesis, TU Bergakademie Freiberg, Germany, 2013.
[2] Bui Tang Bao Ngoc and Michael Reissig, The interplay between time-dependent speed of prop-agation and dissipation in wave models, Fourier analysis, Trends in Mathematics, Springer,2014, 9-45.

QUALITATIVE PROPERTIES OF SOLUTIONS TO σ-EVOLUTION MODELS 217
[3] G. Chen and D. L. Russell, A mathematical model for linear elastic systems with structuraldamping, Quart. Appl. Math. 39 (1981/82), no. 4, 433–454. MR644099 (83f:70034)
[4] M. D’Abbicco and M. Reissig, Semilinear structural damped waves, Math. Methods Appl.Sci. 37 (2014), no. 11, 1570–1592, DOI 10.1002/mma.2913. MR3225191
[5] Daoyuan Fang, Xiaojun Lu, and Michael Reissig, High-order energy decay for structuraldamped systems in the electromagnetical field, Chin. Ann. Math. Ser. B 31 (2010), no. 2,237–246, DOI 10.1007/s11401-008-0185-8. MR2607648 (2011b:35509)
[6] Ronald B. Guenther and John W. Lee, Partial differential equations of mathematical physicsand integral equations, Dover Publications, Inc., Mineola, NY, 1996. Corrected reprint of the1988 original. MR1384540 (97e:35001)
[7] Xiaojun Lu and Michael Reissig, Rates of decay for structural damped models with de-creasing in time coefficients, Int. J. Dyn. Syst. Differ. Equ. 2 (2009), no. 1-2, 21–55, DOI10.1504/IJDSDE.2009.028034. MR2560835 (2010j:35465)
[8] Mohamed Kainane Mezadek, Structural damped σ−evolution operators, PhD thesis, TUBergakademie Freiberg, Germany, 2013.
[9] Sascha Matthes and Michael Reissig,Qualitative properties of structural damped wave models,Eurasian Math. J. 4 (2013), no. 3, 84-106.
[10] Takashi Narazaki and Michael Reissig, L1 estimates for oscillating integrals related to struc-tural damped wave models, Studies in phase space analysis with applications to PDEs,Progr. Nonlinear Differential Equations Appl., vol. 84, Birkhauser/Springer, New York, 2013,pp. 215–258, DOI 10.1007/978-1-4614-6348-1 11. MR3185897
[11] Michael Reissig, Rates of decay for structural damped models with coefficients strictly increas-ing in time, Complex analysis and dynamical systems IV. Part 2, Contemp. Math., vol. 554,Amer. Math. Soc., Providence, RI, 2011, pp. 187–206, DOI 10.1090/conm/554/10969.MR2884403
[12] Yoshihiro Shibata, On the rate of decay of solutions to linear viscoelastic equa-tion, Math. Methods Appl. Sci. 23 (2000), no. 3, 203–226, DOI 10.1002/(SICI)1099-1476(200002)23:3〈203::AID-MMA111〉3.0.CO;2-M. MR1736935 (2001d:35188)
[13] Jens Wirth, Wave equations with time-dependent dissipation. I. Non-effective dissipa-tion, J. Differential Equations 222 (2006), no. 2, 487–514, DOI 10.1016/j.jde.2005.07.019.
MR2208294 (2007d:35171)[14] Jens Wirth, Wave equations with time-dependent dissipation. II. Effective dissipation, J.
Differential Equations 232 (2007), no. 1, 74–103, DOI 10.1016/j.jde.2006.06.004. MR2281190(2007k:35293)
Department of Mathematics, Faculty of Science, Chlef University, Ouled Fares
02180, Algeria
E-mail address: kainane [email protected]
Faculty for Mathematics and Computer Science, TU Bergakademie Freiberg,
Pruferstr.9, 09596 Freiberg, Germany
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13187
The Riemannian Penrose Inequality with Chargefor Multiple Black Holes
Marcus Khuri, Gilbert Weinstein, and Sumio Yamada
Abstract. We present the outline of a proof of the Riemannian Penrose in-
equality with charge r ≤ m +√
m2 − q2, where A = 4πr2 is the area of theoutermost apparent horizon with possibly multiple connected components, mis the total ADM mass, and q the total charge of a strongly asymptoticallyflat initial data set for the Einstein-Maxwell equations, satisfying the chargeddominant energy condition, with no charged matter outside the horizon.
1. Introduction
In a seminal paper [18], R. Penrose examined the validity of the cosmiccensorship conjecture, and outlined a heuristic argument which shows how usingalso Hawking’s area theorem, [10], implies a related inequality. In [17], he gen-eralized this heuristic argument leading to an inequality now referred to as thePenrose inequality. Consider a strongly asymptotically flat (SAF) Cauchy surfacein a spacetime satisfying the dominant energy condition (DEC), with ADM massm containing an event horizon of area A = 4πr2, which undergoes gravitationalcollapse and settles to a Kerr solution. Since the ADM mass m∞ of the final stateis no greater than m, and since the area radius r∞ is no less than r, and since forthe final state we must have m∞ ≥ 1
2r∞ in order to avoid naked singularities, we
must have had m ≥ 12r also at the beginning of the evolution. The event horizon is
indiscernible in the original slice without knowing the full evolution. However, onemay replace the event horizon by the outermost minimal area enclosure of theapparent horizon, the boundary of the region admitting trapped surfaces, andobtain the same inequality. A counterexample to the Penrose inequality wouldtherefore have suggested data which leads under the Einstein evolution to nakedsingularities, while a proof of the inequality could be viewed as evidence in supportof cosmic censorship.
The inequality further simplifies in the time-symmetric case, where theapparent horizon coincides with the outermost minimal area enclosure. The domi-nant energy condition reduces now to non-negative scalar curvature of the Cauchyhypersurface, leading to the Riemannian version of the inequality: the ADM massand the area radius of the outermost compact minimal surface in a SAF 3-manifold
2010 Mathematics Subject Classification. Primary 83C57, 83C50, 53C80, 53C44.M. Khuri was supported by NSF grants DMS-1007156 & DMS-1308753.
S. Yamada was supported by JSPS Grants 23654061 & 24340009.
c©2015 M. Khuri, G. Weinstein, S. Yamada
219

220 MARCUS KHURI, GILBERT WEINSTEIN, AND SUMIO YAMADA
of non-negative scalar curvature satisfy m ≥ r2 with equality if and only if the man-
ifold is a Schwarzschild slice. Note that this characterizes the Schwarzschild sliceas the unique minimizer of m among all such 3-manifolds admitting an outermosthorizon of area A = 4πr2.
This inequality was first proved by Huisken–Ilmanen [11] in the special casewhere the horizon is connected using the inverse mean curvature flow, an approachproposed by Jang–Wald [13], following Geroch [6] who had shown that the Hawkingmass is non-decreasing under this flow. The inequality was proven in full generalityby Bray [1] using a conformal flow of the initial Riemannian metric, and the positivemass theorem [19,21].
We now turn to the charged case which is slightly more subtle. It is naturalto conjecture as above that the Reissner-Nordstrom spacetime (RN), the chargedanalog of Schwarzschild spacetime gives rise to the unique minimizer of m, given rand q. Since RN satisfies m = 1
2 (r + q2/r) where q is the total charge, one is thus
led to conjecture that in any SAF data satisfying Rg ≥ 2(|E|2+ |B|2), where E andB are respectively the electric and magnetic field, and Rg is the scalar curvature ofg, we have
(1) m ≥ 1
2
(r +
q2
r
)with equality if and only if the initial data is RN. This is shown in [11], based onJang [12], but only for a connected horizon, since the proof is based on inversemean curvature flow. In fact, (1) can fail if the horizon is not connected, and acounterexample based on Majumdar-Papapetrou (MP) initial data with two blackholes was constructed in [20]. This counterexample, however, does not suggest acounterexample to cosmic censorship. This is because the right-hand side of (1)is not monotonically increasing in r. Indeed, already Jang observed that (1) isequivalent to two inequalities:
(2) m−√
m2 − q2 ≤ r ≤ m+√
m2 − q2.
Cosmic censorship suggests the upper bound always holds, while the counterexam-ple in [20] violates the lower bound.
In this paper, we prove the upper bound in (2) for multiple black holes. By thepositive mass theorem with charge we have m ≥ |q| with equality if and only if thedata is MP [8]. Hence if r ≤ |q|, the upper bound in (2) follows immediately
r ≤ |q| ≤ m ≤ m+√
m2 − q2.
It thus only remains to prove the upper bound under the additional hypothesis|q| ≤ r. Under this hypothesis, it is the lower bound that follows immediately
m ≤ |q|+√
m2 − q2 ≤ r +√
m2 − q2.
We note that the stability of the outermost horizon in fact implies |q| ≤ r, providedthe horizon is connected [7,14]. In view of the above, the upper bound in (2) isequivalent to (1) under the additional hypothesis |q| ≤ r. The proof of this latterstatement will be based on an adaptation of Bray’s conformal flow; see also [4].
We now introduce a few definitions and state our main theorem and a corol-lary. A time-symmetric initial data set (M, g,E,B) consists of a 3-manifold M , aRiemannian metric g, and vector fields E and B. We assume that the data satisfies

THE RIEMANNIAN PENROSE INEQUALITY WITH CHARGE 221
the Maxwell constraints with no charges outside the horizon divg E = divg B = 0,and the charged DEC
(3) μ = Rg − 2(|E|2 + |B|2) ≥ 0.
We assume that the data is SAF, meaning that the complement of a compact setin M is the finite union of disjoint ends, and on each end the fields decay accordingto
g − δ = O2(|x|−1), E = O1(|x|−2), B = O1(|x|−2),
and Rg is integrable. This guarantees that the ADM mass and the total electricand magnetic charges
m =1
16π
∫S∞
(gij,j − gjj,i)νi dA,
qE =1
4π
∫S∞
Eiνi dA, qB =
1
4π
∫S∞
Biνi dA,
are well-defined. Here, ν is the outer unit normal, and the limit is taken in adesignated end. Without loss of generality, we assume that the magnetic chargeqB = 0, and from now on denote q = qE . This can always be achieved by a fixedrotation in the (E,B)-space. Conformally compactifying all but the designated end,we can now restrict our attention to surfaces which bound compact regions, anddefine S2 to enclose S1 to mean S1 = ∂Ω1, S2 = ∂Ω2 and Ω1 ⊂ Ω2. An outermosthorizon is a compact minimal surface not enclosed in any other compact minimalsurface.
Theorem 1. Let (M, g,E,B) be a SAF initial data set satisfying the chargelessMaxwell constraints, the charged DEC, with ADM mass m, total charge q, andadmitting an outermost horizon of area A = 4πr2. Then the upper bound in (2)holds with equality if and only if the data is RN. Suppose that |q| ≤ r, then (1)holds with equality if and only if the data is RN.
As noted above, the first statement follows from the second.
Corollary 1. Given m and q, satisfying m ≥ |q|, RN is the unique maximizerof A. Given A and q, satisfying 4πq2 ≤ A, RN is the unique minimizer of m.
We point out that the hypothesis of no charges outside the horizon seemsnecessary. On the one hand, our proof uses the divergence-free character of E andB in the final stage once we switch to inverse mean curvature flow. Indeed, wesuspect that our conformal flow would not converge to Reissner-Nordstrom whencharges are present outside the horizon. In fact, in [15], the authors conjecturethat one could construct spherically symmetric counterexamples in this case. Onthe other hand, the heuristic argument based on cosmic censorship would not applysince matter can carry charges out to infinity leading to a final state with a totalcharge different from the initial state. Thus, without additional hypotheses, one isnot able to say how the upper bound in (2) for the final state compares to the sameexpression for the initial state.
In what follows, a brief outline of the main elements in the proof of Theorem 1is given. Full details will appear in a forthcoming paper.

222 MARCUS KHURI, GILBERT WEINSTEIN, AND SUMIO YAMADA
2. The conformal flow
Consider a SAF initial data set (M0, g0, E0, B0) satisfying the Maxwell con-straints and the charged DEC. We define the conformal flow
(4) gt = u4t g0, Ei
t = u−6t Ei
0, Bit = u−6
t Bi0, u0 = 1.
This immediately yields that the Maxwell constraints divgt Et = divgt Bt = 0 arepreserved under the flow and that the charge qt is constant. The logarithmic velocityof the flow vt = ut/ut is determined by the following elliptic problem
(5) Δgtvt − (|Et|2 + |Bt|2)vt = 0, vt → −1 at ∞, vt|Σt= 0,
where Σt is the outermost horizon in gt. We point out that by the maximumprinciple, −1 < v < 0; and by the Hopf boundary Lemma, the outward normalderivative of v on Σt is negative. In particular, this guarantees that the surfacesΣt always move outward. Using the covariance Lg(vu) = u5Lu4gv of the conformal
Laplacian Lg = Δg − 18Rg, we have
1
8
d(u5tRgt)
dt= −Lg0 ut = −u5
t
(|Et|2 + |Bt|2 −
1
8Rgt
)vt;
hence, from (3), u4tμt is constant, and in particular μt ≥ 0 for all t provided μ0 ≥ 0.
Thus the charged DEC is preserved. The proof of the existence of solutions to (4)–(5) follows [1] closely, and it is easily checked that At is constant. The remainingtwo ingredients of the proof are to show that the mass mt is non-increasing, andthe inequality (1) holds at some final time T ∈ (0,∞], implying that (1) holds alsoat the initial time t = 0.
3. Monotonicity
As in [1], the proof of monotonicity of mt for our flow is based on a cleverdoubling argument by Bunting–Masood-Ul-Alam first introduced in [2]. Howeverhere a more judicious choice of conformal factor, inspired by [16], is required beforewe can apply the positive mass theorem. First, we note that since the flow (4)–(5)is autonomous, it is enough to show that mt ≤ 0 at t = 0. For convenience we dropthe subscript 0.
We take two copies M± of the exterior of Σ, attach them at Σ, and equip them
with conformal metrics g± = w4±g, where w± = 1
2
√(1± v)2 − φ2 and φ satisfies
the differential inequality
(6) φ
(Δgφ−
∇v · ∇φ
v
)≥ Λ
∣∣∣∣|E|2 + |B|2 − |∇φ|2v2
∣∣∣∣ ,for some Λ > 0 large enough, with boundary conditions ∂νφ = 0 on Σ, φ → 0as |x| → ∞. From the asymptotic expansion, it turns out that |x|φ → |q| atinfinity. Inequalities (3) and (6) guarantee that Rg± ≥ 0 if Λ ≥ 12, and theboundary conditions guarantee that mean curvatures on both sides of the gluingagree. Furthermore the maximum principle, m ≥ |q|, and the asymptotics of φguarantee that (1 ± v)2 − φ2 > 0, and the asymptotics of w± guarantee that theM+ end is compactified while the mass of the M− end is given by m = m−γ, whereγ is determined by v = −1 + γ/|x|+ O(|x|−2). Since v > −1, we have γ > 0. Thepositive mass theorem [19,21] can now be applied to conclude that m ≥ 0 with

THE RIEMANNIAN PENROSE INEQUALITY WITH CHARGE 223
equality if and only if (M, g±) is the Euclidean space. Since, as in [1] m = 2(γ−m),
we get monotonicity with equality if and only if (M, g±) is flat.It remains to show that (6) has a positive solution satisfying the required bound-
ary conditions. Since this part is very technical, we leave the details to our forth-coming article. The main idea is to solve (6) with equality replacing inequality onthe exterior of a small neighborhood of the boundary Ω = {x ∈M | dist(x,Σ) > τ}.We use the Leray-Schauder fixed point theorem [9, Theorem 11.6] to accomplishthis, with appropriately chosen Dirchlet boundary conditions on ∂Ω. Using sucha domain avoids the difficulty of singular coefficients that occurs at Σ due to thevanishing of v. Finally φ is then extended across ∂Ω while preserving the inequal-ity (6). Although the regularity of the extended solution is only C1,1 across ∂Ω,this is enough for an application of the positive mass theorem as described in thepreceding paragraph.
4. Exhaustion
Considerable effort is spent in [1] to show that the exterior of Σt convergesas t → ∞ to a Schwarzschild slice. We circumvent these difficulties and insteadobtain (1) at a late time T . As in [1], we prove in two steps that the surfaceΣt eventually encloses any given compact surface. First, we show that no compactsurface in M can enclose Σt for all t. Then we show that Σt must eventually encloseany given compact surface. It is here that the hypothesis |q| ≤ r is used. Recall thatthis inequality is necesary for the connectedness of the outermost horizon. Thusat late times, ΣT is connected, and hence the inverse mean curvature flow can beapplied to obtain (1) for (MT , gT , ET , BT ), where MT is the exterior of ΣT .
After a perturbation, it may be assumed that the initial data set (M, g,E,B)has charged harmonic asymptotics [3]. That is, in the asymptotic end, g = U4
0 δ,E = U−6
0 Eδ, Eδ = q∇r−1 where δ is the Euclidean metric, Rg = −8U−50 ΔδU0 =
2|E|2, and B = 0.
Lemma 1. If |q| < r, then Σt cannot be entirely enclosed by the coordinatesphere Sr(t) for all t, where r(t) = εre2t for some sufficiently small ε.
Assume by contradiction that Σt is entirely enclosed by Sr(t) for all t. Weshow that for some large T , ΣT is not the outermost minimal area enclosure of Σ0,yielding a contradiction.
Writing Ut = utU0 and Vt = vtutU0, then we have
ΔδUt = −1
4|Eδ|2U−3
t , ΔδVt =3
4U−4t |Eδ|2Vt.
Let Vt be the unique solution of the second equation above with Ut replaced by
Ut, and satisfying Vt = 0 on Sr(t), and Vt → −e−t as |x| → ∞, where Ut is theconformal factor Ut in the conformal flow of the Reissner-Nordstrom initial data.Note that Vt is the velocity vtUt in the conformal flow of the Reissner-Nordstrominitial data, where vt is obtained from (9) by setting m2 = 4e−4tr(t)2 + q2, andthus from (8)
Ut =
(e−2t +
√4e−4tr(t)2 + q2
|x| + e−2t r(t)2
|x|2
)1/2
.

224 MARCUS KHURI, GILBERT WEINSTEIN, AND SUMIO YAMADA
The idea is to compare Vt and Vt to obtain estimates on Ut in terms of Ut.
However, we only need to estimate∫Sr(t)
U4t dσδ. Thus, let Ut be the unique solution
of
ΔδUt = −1
4|Eδ|2U−3
t , Ut → e−t as |x| → ∞,
Ut|Sr(t)=
(1
4πr(t)2
∫Sr(t)
U4t
)1/4
.
This radial function can be computed explicitly(7)
U4t (x) = e−4t+
e−2t√
83
(α+ 1
2q2)
|x| +α
|x|2+e2t
√83
(α+ 1
2q2)(α− q2)
6|x|3 +e4t(α− q2)2
36|x|4 ,
where α is a positive constant depending on∫Sr(t)
U4t . The assumption |q| ≤ r
guarantees that α ≥ q2 + 6e−4tr(t)2, and hence Ut(x) ≥ Ut(x) for |x| ≥ r(t).
Now Wt = Vt − Vt satisfies
ΔδWt =3
4U−4t |Eδ|2Wt +
3
4(U−4
t − U−4t )Vt|Eδ|2,
Wt → 0 as |x| → ∞, and Wt > 0 on Sr(t) because Vt(r(t)) = ddt Ut(r(t)) < 0 =
Vt(r(t)). Therefore, since U−4t − U−4
t ≥ 0 the maximum principle gives that Wt ≥ 0outside Sr(t).
This yields the upper bound Vt ≤ Vt, and hence since Vt =ddt Ut it also gives an
estimate of Ut from above in terms of Vt. This gives an upper bound on∫Sr(t)
U4t ,
and it then follows as in [1] that |Sr(t)| ≤ ε2A[2 + O(ε−1e−t)]4. Hence, for εsufficiently small and T sufficiently large, we have |Sr(T )| < A, and ΣT is not outerarea minimizing, in contradiction to its definition.
5. Rigidity
In the case of equality, the mass m of the doubled manifold (M, g±) in the
monotonicity proof must be zero, hence M is R3 and consequently Σ is connected.Thus, we can use Disconzi-Khuri’s definition of the charged Hawking mass
mCH(S) =r
2
(1− q2
r2− 1
16π
∫S
H2 dA
),
and its monotonicity under the inverse mean curvature to show that if equalityholds when the horizon is connected, then the initial data set is RN. AlthoughB is assumed to vanish in [5, Theorem 1], the argument carries through in thetime-symmetric case even if B �= 0.
Finally, we note that if the initial data set is RN, then the conformal flow definedby (4) and (5) simply yields a rescaling of RN as indeed it must by rigidity. TheRN metric can be written in isotropic coordinates as −V 2dt2 + g, where g = U4δ,
(8) U(x) =
(1 +
m
|x| +m2 − q2
4|x|2
)1/2
,

THE RIEMANNIAN PENROSE INEQUALITY WITH CHARGE 225
and the electric fields is Ei = U−2∂i(q/|x|). The conformal flow given by rescalingthe coordinates x → e−2tx has logarithmic flow velocity
(9) vt =−e−2t + e2t(m2 − q2)/4|x|2
e−2t +m/|x|+ e2t(m2 − q2)/4|x|2 .
It is now straightforward to verify that vt satisfies (4)–(5).
References
[1] Hubert L. Bray, Proof of the Riemannian Penrose inequality using the positive mass theorem,
J. Differential Geom. 59 (2001), no. 2, 177–267. MR1908823 (2004j:53046)[2] Gary L. Bunting and A. K. M. Masood-ul-Alam, Nonexistence of multiple black holes in
asymptotically Euclidean static vacuum space-time, Gen. Relativity Gravitation 19 (1987),no. 2, 147–154, DOI 10.1007/BF00770326. MR876598 (88e:83031)
[3] Justin Corvino, On the asymptotics for the Einstein-Maxwell constraint equations, in prepa-ration.
[4] Sergio Dain, Marcus Khuri, Gilbert Weinstein, and Sumio Yamada, Lower Bounds for theArea of Black Holes in Terms of Mass, Charge, and Angular Momentum, Phys. Rev. D88(2013), 024048.
[5] Marcelo M. Disconzi and Marcus A. Khuri, On the Penrose inequality for charged blackholes, Classical Quantum Gravity 29 (2012), no. 24, 245019, 18, DOI 10.1088/0264-9381/29/24/245019. MR3002957
[6] Robert Geroch, Energy Extraction, Annals of the New York Academy of Sciences 224 (1973),no. 1, 108–117.
[7] G. W. Gibbons, Some comments on gravitational entropy and the inverse mean curva-ture flow, Classical Quantum Gravity 16 (1999), no. 6, 1677–1687, DOI 10.1088/0264-9381/16/6/302. MR1697098 (2000j:53089)
[8] G. W. Gibbons, S. W. Hawking, Gary T. Horowitz, and Malcolm J. Perry, Positive mass the-orems for black holes, Comm. Math. Phys. 88 (1983), no. 3, 295–308. MR701918 (84k:83015)
[9] David Gilbarg and Neil S. Trudinger, Elliptic partial differential equations of second or-der, Classics in Mathematics, Springer-Verlag, Berlin, 2001. Reprint of the 1998 edition.MR1814364 (2001k:35004)
[10] S. W. Hawking and G. F. R. Ellis, The large scale structure of space-time, Cambridge Uni-
versity Press, London-New York, 1973. Cambridge Monographs on Mathematical Physics,No. 1. MR0424186 (54 #12154)
[11] Gerhard Huisken and Tom Ilmanen, The inverse mean curvature flow and the Riemann-ian Penrose inequality, J. Differential Geom. 59 (2001), no. 3, 353–437. MR1916951(2003h:53091)
[12] Pong Soo Jang, Note on cosmic censorship, Phys. Rev. D20 (1979), 834–838.[13] Pong Soo Jang and Robert M. Wald, The positive energy conjecture and the cosmic censor
hypothesis, J. Mathematical Phys. 18 (1977), no. 1, 41–44. MR0523907 (58 #25755)[14] Marcus A Khuri, Sumio Yamada, and Gilbert Weinstein, On the Riemannian Penrose in-
equality with charge and the cosmic censorship conjecture, Res. Inst. Math. Sci. Kokyuroku1862 (2012), 63–66.
[15] Edward Malec and Niall O Murchadha, Trapped surfaces and the Penrose inequality inspherically symmetric geometries, Phys. Rev. D (3) 49 (1994), no. 12, 6931–6934, DOI10.1103/PhysRevD.49.6931. MR1278625 (95b:83071)
[16] A. K. M. Masood-ul-Alam, Uniqueness proof of static charged black holes revisited, ClassicalQuantum Gravity 9 (1992), no. 5, L53–L55. MR1163879 (93f:83059)
[17] R. Penrose, Some unsolved problems in classical general relativity, Seminar on DifferentialGeometry, 1982, pp. 631–668.
[18] Roger Penrose, Naked Singularities, Annals of the New York Academy of Sciences 224 (1973),no. 1, 125–134.
[19] Richard Schoen and Shing Tung Yau, On the proof of the positive mass conjecture in generalrelativity, Comm. Math. Phys. 65 (1979), no. 1, 45–76. MR526976 (80j:83024)
[20] Gilbert Weinstein and Sumio Yamada, On a Penrose inequality with charge, Comm. Math.Phys. 257 (2005), no. 3, 703–723, DOI 10.1007/s00220-005-1355-0. MR2164949 (2007c:83016)

226 MARCUS KHURI, GILBERT WEINSTEIN, AND SUMIO YAMADA
[21] Edward Witten, A new proof of the positive energy theorem, Comm. Math. Phys. 80 (1981),no. 3, 381–402. MR626707 (83e:83035)
Department of Mathematics, Stony Brook University, Stony Brook, New York
11794
E-mail address: [email protected]
Department of Physics and Department of Computer Sciences and Mathematics,
Ariel University, Ariel 40700, Israel
E-mail address: [email protected]
Department of Mathematics, Gakushuin University, Tokyo 171-8588, Japan
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13188
Criteria for Invariance of Convex Setsfor Linear Parabolic Systems
Gershon Kresin and Vladimir Maz’ya
Abstract. We consider systems of linear partial differential equations, whichcontain only second and first derivatives in the x variables and which areuniformly parabolic in the sense of Petrovskiı in the layer Rn× [0, T ]. For suchsystems we obtain necessary and, separately, sufficient conditions for invarianceof the closure of an arbitrary convex proper subdomain of Rm. These necessaryand sufficient conditions coincide if the coefficients of the system do not dependon t. The above-mentioned criterion is formulated as an algebraic conditiondescribing a relation between the geometry of the invariant convex set and thecoefficients of the system. The criterion is concretized for certain classes ofinvariant convex sets: polyhedral angles, cylindrical and conical bodies.
1. Main results and background
We consider the Cauchy problem for parabolic systems of the form
(1.1)∂u
∂t−
n∑j,k=1
Ajk(x, t)∂2u
∂xj∂xk−
n∑j=1
Aj(x, t)∂u
∂xj= 0,
where u = (u1, . . . , um) and (x, t) ∈ Rn+1T = Rn × (0, T ].
Henceforth byS we denote the closure of an arbitrary convex proper subdomainof Rm. We say that S is invariant for the system (1.1) in Rn+1
T if any solution
u of (1.1), which is continuous and bounded in Rn+1T , belongs to S under the
assumption that u(·, 0) ∈ S. Note that the classical maximum modulus principleand the componentwise maximum principle for parabolic and elliptic systems canbe obviously interpreted as statements on the invariance of a ball and an orthant,respectively.
In the present paper, we are interested in algebraic conditions on the coefficientsAjk,Aj ensuring the invariance of arbitrary S.
The notion of invariant set for parabolic and elliptic systems and the firstresults concerning these sets appeared in Weinberger’s paper [27]. Nowadays, thereexists a large literature on invariant sets for nonlinear parabolic and elliptic systemswith principal part subjected to various structural conditions such as scalarity, diag-onality and others (see, for example, Alikakos [1,2], Amann [3], Bates [4], Bebernes
2010 Mathematics Subject Classification. Primary 35K45; Secondary 35B50.The research of the first author was supported by the KAMEA program of the Ministry of
Absorption, State of Israel, and by the Ariel University.
c©2015 G. Kresin, V. Maz’ya
227

228 GERSHON KRESIN AND VLADIMIR MAZ’YA
and Schmitt [6], Bebernes, Chueh and Fulks [5], Chueh, Conley and Smoller [7],Conway, Hoff and Smoller [8], Cosner and Schaefer [9], Kuiper [16], Lemmert [17],Redheffer and Walter [21, 22], Schaefer [24], Smoller [25], Weinberger [28] andreferences therein).
We note that maximum principles for weakly coupled parabolic systems arediscussed in the books by Protter and Weinberger [20], and Walter [26] whichalso contain rich bibliographies on this subject. The criteria for validity of thecomponentwise maximum principle for a linear parabolic system of the generalform in Rn+1
T were obtained in the paper by Otsuka [19]. In our papers [12]-[14]and [18] (see also monograph [15] and references therein) the criteria for validityof other types of maximum principles for parabolic systems were established, whichare interpreted as conditions for the invariance of compactS.Henceforth we assume:
(i) real (m ×m)-matrix-valued functions Ajk = Akj and Aj are defined in
Rn+1T and have continuous and bounded derivatives in x up to the second
and first order, respectively, which satisfy the uniform Holder condition
on Rn+1T with exponent α ∈ (0, 1] with respect to the parabolic distance(
|x− x′|2 + |t− t′|)1/2
;
(ii) system (1.1) is uniformly parabolic in the sense of Petrovskiı in Rn+1T , i.e.,
for any point (x, t) ∈ Rn+1T , the real parts of the λ-roots of the equation
det(∑n
j,k=1Ajk(x, t)σjσk + λI)= 0 satisfy the inequality Re λ(x, t,σ) ≤
−δ|σ|2, where δ = const > 0, for any σ = (σ1, . . . , σn) ∈ Rn, I is theidentity matrix of order m, and | · | is the Euclidean length of a vector.
The main result of the paper is the following assertion.
Theorem.
(i) Let the unit outward normal ν(a) to ∂S at any point a ∈ ∂S, forwhich it exists, be an eigenvector of all matrices A∗
jk(x, t), A∗j (x, t),
1 ≤ j, k ≤ n, (x, t) ∈ Rn+1T . Then S is invariant for the system (1.1) in
Rn+1T . Here and henceforth ∗-operation means passage to the transposed
matrix.(ii) Let S be invariant for the system (1.1) in Rn+1
T . Then the unit outwardnormal ν(a) to ∂S at any point a ∈ ∂S for which it exists, is an eigen-vector of all matrices A∗
jk(x, 0), A∗j (x, 0), 1 ≤ j, k ≤ n, x ∈ Rn.
We note that this result was obtained in our paper [14] for the case of a compactS and Aj = 0, 1 ≤ j ≤ n.
If the coefficients of the system do not depend on t, the theorem just formulatedcontains the following exhaustive criterion of the invariance of S.
Corollary. The set S is invariant for the parabolic system
(1.2)∂u
∂t−
n∑j,k=1
Ajk(x)∂2u
∂xj∂xk−
n∑j=1
Aj(x)∂u
∂xj= 0
in Rn+1T if and only if the unit outward normal ν(a) to ∂S at any point a ∈ ∂S
for which it exists, is an eigenvector of all matrices A∗jk(x), A∗
j (x), 1 ≤ j, k ≤ n,x ∈ Rn.

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 229
We give four examples of invariant sets S to show the usefulness of this corol-lary. Here the conditions on the coefficients are quite explicit.
Figure 1. Invariant dihedral angle in R3. Nondiagonal elementsof the second and third rows of all (3× 3)-matrix-valued functionsAjk and Aj are equal to zero. Here ν1 = (0,−1, 0)∗, ν2 =(0, 0,−1)∗.
Figure 2. Invariant rectangular cylinder in R3. Nondiagonal el-ements of the second and third rows of all (3 × 3)-matrix-valuedfunctions Ajk and Aj are equal to zero. Here ν1 = (0, 1, 0)∗, ν2 =(0, 0, 1)∗.
The next two examples concern the case of invariant cones. Here conditions onthe coefficients are different for polyhedral and smooth cones.

230 GERSHON KRESIN AND VLADIMIR MAZ’YA
Figure 3. Invariant polyhedral cone in R3 with three facets.All (3 × 3)-matrix-valued functions Ajk and Aj are similar todiagonal with the transforming matrix [ν1,ν2,ν3]
∗. Here ν1 =(1√3, 1√
3, 1√
3
)∗, ν2 = (0,−1, 0)∗, ν3 = (0, 0,−1)∗.
Figure 4. Invariant cone in R3 with a smooth guide. All (3× 3)-matrix-valued functions Ajk and Aj are scalar.
We note that the smoothness conditions of the coefficients of the system (1.1)in the Theorem can be relaxed but we leave this extension outside the scope of thepresent paper.

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 231
2. Necessary conditions for invariance of S
By [Cb(Rn+1T )]m, we denote the space of continuous and bounded m-component
vector-valued functions defined on Rn+1T . By [C(2,1)(Rn+1
T )]m, we mean the space
of m-component vector-valued functions on Rn+1T whose derivatives with respect to
x up to the second order and first derivative with respect to t are continuous. Weomit the upper index m in notation of spaces in the case m = 1.
Let ν be a fixed m-dimensional unit vector, let a be a fixed m-dimensionalvector, and let Rm
ν (a) = {u ∈ Rm : (u− a,ν) ≤ 0}.By ∂∗S, we mean the set of points a ∈ ∂S for which there exists the unit
outward normal ν(a) to ∂S. We denote NS = {ν(a) : a ∈ ∂∗S}.The next assertion contains a necessary condition for the invariance of S for
the parabolic system (1.1) in Rn+1T .
Proposition 2.1. Let S be invariant for the system (1.1) in Rn+1T . Then there
exists a function g : Rn+1T × Rn ×NS → R such that
(2.1) G∗(t, 0, x, η)ν = g(t, x; η;ν)ν ,
where G(t, τ, x, η) is the fundamental matrix of solutions for the system (1.1).
Proof. Suppose that S is invariant for the system (1.1) in Rn+1T . According
to Eidel’man [10, Theorem 1.3, p. 243], there exists a unique vector-valued function
in [C(2,1)(Rn+1T )]m ∩ [Cb(R
n+1T )]m, which satisfies the Cauchy problem
(2.2)
∂u
∂t−
n∑j,k=1
Ajk(x, t)∂2u
∂xj∂xk−
n∑j=1
Aj(x, t)∂u
∂xj= 0 in Rn+1
T ,
u∣∣t=0
= ψ,
where ψ is a bounded and continuous vector-valued function on Rn. This solutioncan be represented in the form
u(x, t) =
∫Rn
G(t, 0, x, η)ψ(η)dη.
We fix a point a ∈ ∂∗S and denote ν(a) by ν. Since
(2.3)
∫Rn
G(t, 0, x, η)dη = I,
the vector-valued function
(2.4) ua(x, t) = u(x, t)− a =
∫Rn
G(t, 0, x, η)(ψ(η)− a
)dη
satisfies the Cauchy problem
(2.5)
∂ua
∂t−
n∑j,k=1
Ajk(x, t)∂2ua
∂xj∂xk−
n∑j=1
Aj(x, t)∂ua
∂xj= 0 in Rn+1
T ,
ua
∣∣t=0
= ψ−a.
We fix a point (x, t) ∈ Rn+1T and represent G∗(t, 0, x, η)ν as
(2.6) G∗(t, 0, x, η)ν = g(t, x; η;ν)ν + f(t, x; η;ν) ,

232 GERSHON KRESIN AND VLADIMIR MAZ’YA
where
(2.7) g(t, x; η;ν) =(G∗(t, 0, x, η)ν,ν
)and
(2.8) f(t, x; η;ν) = G∗(t, 0, x, η)ν −(G∗(t, 0, x, η)ν,ν
)ν .
Let us fix a point (x, t), t > 0. By the boundedness and continuity in η of G(t, 0, x, η)(see, e.g., Eidel’man [10], pp. 72, 93), f(t, x; η;ν) is also bounded and continuousin η.
Suppose there exists a set M ⊂ Rn, measnM > 0, such that for all η ∈ M,the inequality
(2.9) f(t, x; η;ν) �= 0
holds, and for all η ∈ Rn\M the equality f(t, x; η;ν) = 0 is valid.Further, we set
(2.10) ψ(η)− a = αf(t, x; η;ν)− βν ,
where α and β are constants. It follows from (2.8) and (2.10) that
(2.11) (ψ(η)− a,ν) = −β, |ψ(η)− a| =(α2|f(t, x; η;ν)|2 + β2
)1/2and
(2.12) (ψ(η)− a, G∗(t, 0, x, η)ν) = α|f(t, x; η;ν)|2 − β(G∗(t, 0, x, η)ν,ν
).
We introduce a Cartesian coordinate system Oξ1 . . . ξm−1 in the plane, tangentto ∂S with the origin at the point O = a. We direct the axis Oξm along theinterior normal to ∂S. Let e1, . . . , em denote the coordinate orthonormal basis ofthis system and let ξ′ = (ξ1, . . . , ξm−1).
We use the notation
μ = sup{|f(t, x; η;ν)| : η ∈ Rn}.Let α be a positive number and let ∂S be described by the equation ξm = F (ξ′) ina neighbourhood of O, where F is convex and differentiable at O.
We put β = max {F (ξ′) : |ξ′| = αμ}. By (2.11),
(ψ(η)− a, em) = β ≥ 0, |ψ(η)− a| ≤ (α2μ2 + β2)1/2,
which implies ψ(η) ∈ S for all η ∈ Rn.By the invariance of S, this gives
(2.13)
(ua(x, t),ν
)=
∫Rn
(G(t, 0, x, η)
(ψ(η)− a
),ν
)dη
=
∫Rn
(ψ(η)− a, G∗(t, 0, x, η)ν) dη ≤ 0 .
Now, by (2.13) and (2.12),
0 ≥(ua(x, t),ν
)=
∫Rn
[α|f(t, x; η;ν)|2 − β
(G∗(t, 0, x, η)ν,ν
)]dη,
which along with (2.3) leads to
(2.14) 0 ≥(ua(x, t),ν
)= α
(∫M|f(t, x; η;ν)|2dη − β
α
).

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 233
By the differentiability of F at O, we have β/α → 0 as α → 0. Conse-quently, one can choose α so small that the second factor on the right-hand side of(2.14) becomes positive, which contradicts the condition measnM > 0. Therefore,f(t, x; η;ν) = 0 for almost all η ∈ Rn. This together with (2.8) and the continuityof G(t, 0, x, η) in η shows that f(t, x; η;ν) = 0 for all η ∈ Rn.
Since (x, t) ∈ Rn+1T and a ∈ ∂∗S are arbitrary, we arrive at (2.1) by (2.6). �
We introduce the space [Ck,αb (Rn)]m of m-component vector-valued functions
defined in Rn and having continuous and bounded derivatives up to order k, whichsatisfy the uniform Holder condition with exponent α, 0 < α ≤ 1.
By [Ck,αb (Rn+1
T )]m, we denote the space of m-component vector-valued func-
tions defined in Rn+1T , having continuous and bounded x-derivatives up to order
k, which satisfy the uniform Holder condition with exponent α with respect to the
parabolic distance(|x − x′|2 + |t − t′|
)1/2between the points (x, t) and (x′, t′) in
Rn+1T . For the space of (m × m)-matrix-valued functions, defined on Rn+1
T and
having similar properties, we use the notation [Ck,αb (Rn+1
T )]m×m.
Let
A(x, t,Dx) =n∑
j,k=1
Ajk(x, t)∂2
∂xj∂xk+
n∑j=1
Aj(x, t)∂
∂xj+A0(x, t).
We quote the following known assertion (see Eidel’man [10], Theorem 5.3, p. 283),which will be used in the sequel.
Theorem 2.1. Let (m×m)-matrix valued coefficients Ajk,Aj ,A0 of the oper-
ator A(x, t,Dx) belong to [C0,αb (Rn+1
T )]m×m and let u0 ∈ [C2,αb (Rn)]m. Let, further,
the system
∂u
∂t− A(x, t,Dx)u = 0,
u = (u1, . . . , um), be uniformly parabolic in the sense of Petrovskiı in the layer
Rn+1T and let G(t, τ, x, η) be its fundamental matrix.
Then the vector-valued function
u(x, t) =
∫Rn
G(t, 0, x, η)u0(η)dη
belongs to [C2,αb (Rn+1
T )]m and it is a unique solution in this class of the Cauchyproblem
∂u
∂t− A(x, t,Dx)u = 0 in Rn+1
T , u∣∣t=0
= u0 .
The following assertion gives a necessary condition for the invariance ofS whichis formulated in terms of the coefficients of system (1.1). It settles the necessitypart of the Theorem from Section 1.
Proposition 2.2. Let S be invariant for the system (1.1) in Rn+1T . Then there
exist functions ajk, aj : Rn ×NS → R, 1 ≤ j, k ≤ n, such that
A∗jk(x, 0)ν = ajk(x;ν)ν, A∗
j (x, 0)ν = aj(x;ν)ν.

234 GERSHON KRESIN AND VLADIMIR MAZ’YA
Proof. Suppose that S is invariant for the system (1.1) in Rn+1T . We fix a
point a ∈ ∂∗S and denote ν(a) by ν. Let the function ψ in (2.5) be defined by
(2.15) ψ(x) = a+
( n∑j,k=1
αjk(xj − yj)(xk − yk) +n∑
j=1
βj(xj − yj)
)ζr(x− y)τ ,
where αjk, βj are constants, y is a fixed point in Rn, ζr ∈ C∞0 (Rn), 0 ≤ ζr(x) ≤ 1,
ζr(x) = 1 for |x| ≤ r/2 and ζr(x) = 0 for |x| ≥ r, and τ is a unit m-dimensionalvector which is orthogonal to ν.
It follows from (2.4) and Proposition 2.1 that(ua(x, t),ν
)=
∫Rn
(ψ(η)− a, G∗(t, 0, x, η)ν) dη
=
∫Rn
g(t, x; η;ν) (ψ(η)− a, ν) dη ,
which, by (2.15), gives(ua(x, t),ν
)= 0. This and (2.5) imply
n∑j,k=1
(∂2ua
∂xj∂xk, A∗
jk(x, t)ν
)+
n∑j=1
(∂ua
∂xj, Aj(x, t)
∗ν
)= 0 .
By Theorem 2.1, we pass to the limit as t→ 0 to obtain
(2.16)n∑
j,k=1
(∂2ψa
∂xj∂xk, A∗
jk(x, 0)ν
)+
n∑j=1
(∂ψa
∂xj, A∗
j (x, 0)ν
)= 0 ,
where ψa(x) = ψ(x)− a. Now, (2.15) leads to
∂2ψa
∂xj∂xk
∣∣∣x=y
= αjkτ ,∂ψa
∂xj
∣∣∣x=y
= βjτ .
Then, by (2.16),n∑
j,k=1
αjk
(τ , A∗
jk(y, 0)ν)+
n∑j=1
βj
(τ , A∗
j (y, 0)ν)= 0 .
Hence, the arbitrariness of the αjk, βj and τ implies the existence of functions ajkand aj such that
A∗jk(y, 0)ν = ajk(y)ν, A∗
j (y, 0)ν = aj(y)ν, 1 ≤ j, k ≤ n
with ν = ν(a), where y ∈ Rn and a ∈ ∂∗S are arbitrary fixed points. The proof iscomplete. �
3. Sufficient condition for invariance of S
Let
L =∂
∂t−
n∑j,k=1
ajk(x, t)∂2
∂xj∂xk−
n∑j=1
aj(x, t)∂
∂xj,
where the functions ajk = akj , aj are bounded in Rn+1T and
n∑j,k=1
ajk(x, t)σjσk > 0
for all (x, t) ∈ Rn+1T and σ = (σ1, . . . , σn) �= 0.

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 235
It is known (see, e.g., [11, Theorem 8]), that the solution u ∈ Cb(Rn+1T ) ∩
C(2,1)(Rn+1T ) of the equation Lu = 0 is non-negative if its initial value u(x, 0) is
non-negative.
Let u ∈ Cb(Rn+1T ) ∩ C(2,1)(Rn+1
T ) be a solution of Lu = 0. We define twofunctions
w+(x, t) = M − u(x, t), w−(x, t) = u(x, t)−M ,
where
M = supy∈Rn
u(y, 0), M = infy∈Rn
u(y, 0) .
Since Lw+ = Lw− = 0 and w+(x, 0) ≥ 0, w−(x, 0) ≥ 0, it follows that
w+(x, t) ≥ 0, w−(x, t) ≥ 0 .
Hence
M ≤ u(x, t) ≤M
for all (x, t) ∈ Rn+1T . Thus, for any solution u ∈ Cb(R
n+1T ) ∩ C(2,1)(Rn+1
T ) of theparabolic equation Lu = 0 the maximum principle
(3.1) infy∈Rn
u(x, 0) ≤ u(x, t) ≤ supy∈Rn
u(y, 0)
holds.
Proposition 3.1. Let ν be a fixed m-dimensional unit vector and let a standfor a fixed point in Rm. Let the equalities
(3.2) A∗jk(x, t)ν = ajk(x, t)ν, A∗
j (x, t)ν = aj(x, t)ν, 1 ≤ j, k ≤ n,
hold for all (x, t) ∈ Rn+1T with ajk, aj : Rn+1
T → R. Then the half-space Rmν (a) is
an invariant set for the system (1.1) in Rn+1T .
Proof. Let u ∈ [Cb(Rn+1T )]m ∩ [C(2,1)(Rn+1
T )]m be a solution of the Cauchyproblem (2.2). Then the vector-valued function ua = u − a is solution of theCauchy problem (2.5).
Hence,
∂
∂t(ua,ν)−
n∑j,k=1
(Ajk(x, t)
∂2ua
∂xj∂xk, ν
)−
n∑j=1
(Aj(x, t)
∂ua
∂xj, ν
)
=∂
∂t(ua,ν)−
n∑j,k=1
(∂2ua
∂xj∂xk, A∗
jk(x, t)ν
)−
n∑j=1
(∂ua
∂xj∂xk, A∗
j (x, t)ν
)= 0 .
By (3.2), we arrive at
∂
∂t(ua,ν)−
n∑j,k=1
(∂2ua
∂xj∂xk, ajk(x, t)ν
)−
n∑j=1
(∂ua
∂xj, aj(x, t)ν
)
=∂
∂t(ua,ν)−
n∑j,k=1
ajk(x, t)∂2
∂xj∂xk(ua,ν)−
n∑j=1
aj(x, t)∂
∂xj(ua,ν) = 0 .
Thus the function ua = (ua,ν) satisfies
∂ua
∂t−
n∑j,k=1
ajk(x, t)∂2ua
∂xj∂xk−
n∑j=1
aj(x, t)∂ua
∂xj= 0 in Rn+1
T , ua
∣∣∣t=0
= (ψ − a,ν).

236 GERSHON KRESIN AND VLADIMIR MAZ’YA
It follows from (3.2) and uniform parabolicity of system (1.1) in the sense of
Petrovskiı in Rn+1T that
n∑j,k=1
ajk(x, t)σjσk ≥ δ|σ|2
for all (x, t) ∈ Rn+1T and σ = (σ1, . . . , σn), where δ is a positive constant.
Therefore, by the maximum principle (3.1), we obtain the inequalities
infy∈Rn
(u(y, 0)− a,ν
)≤
(u(x, t)− a,ν
)≤ sup
y∈Rn
(u(y, 0)− a,ν
)for solutions to the scalar parabolic equation with a vanishing zero-order term inRn+1
T with the unknown function ua, i.e., the half-space Rmν (a) is invariant for the
system (1.1) in Rn+1T . �
The next assertion results directly from Proposition 3.1 and the known assertion(Rockafellar [23, Theorem 18.8]):
S =⋂
a∈∂∗S
Rmν(a)(a).
Proposition 3.2. Let S be a set as above and let the equalities
A∗jk(x, t)ν = ajk(x, t;ν)ν, A∗
j (x, t)ν = aj(x, t;ν)ν, 1 ≤ j, k ≤ n,
hold for all (x, t) ∈ Rn+1T and ν ∈ NS with ajk, aj : R
n+1T ×NS → R.
Then S is an invariant for the system (1.1) in Rn+1T .
Hence, the proof of sufficiency in the Theorem from Section 1 is obtained.
4. Corollaries
Let us introduce a layer Rn+1τ,T = Rn× (τ, T ], where τ ∈ [0, T ). We say that S is
invariant for the system (1.1) in Rn+1τ,T , if any solution u of (1.1), which is continuous
and bounded in Rn+1τ,T , belongs to S under the assumption that its initial values
u(·, τ ) lie in S.Let τ ∈ [0, T ). Repeating almost word for word all previous proofs replacing
u|t=0 by u|t=τ , Rn+10,T by Rn+1
τ,T , G(t, 0, x, η) by G(t, τ, x, η) and making obvioussimilar changes, we arrive at the following criterion for the invariance of S for theparabolic system (1.1) in any layer Rn+1
τ,T with τ ∈ [0, T ).
Proposition 4.1. The set S is invariant for the system (1.1) in the layerRn+1
τ,T for all τ ∈ [0, T ) simultaneously, if and only if the unit outward normal ν(a)to ∂S at any point a ∈ ∂S, for which it exists, is an eigenvector of all matricesA∗
jk(x, t), A∗j (x, t), 1 ≤ j, k ≤ n, (x, t) ∈ Rn+1
T .
All criteria formulated below concern invariant sets S for the system (1.2) inRn+1
T . We note that similar assertions are valid also for the system (1.1) in any
layer Rn+1τ,T with τ ∈ [0, T ).
Polyhedral angles. We introduce a polyhedral angle
Rm+ (αm−k+1, . . . , αm) = {u = (u1, . . . , um) : um−k+1 ≥ αm−k+1, . . . , um ≥ αm},
where k = 1, . . . ,m. In particular, Rm+ (αm) is a half-space, Rm
+ (αm−1, αm) is adihedral angle, and Rm
+ (α1, . . . αm) is an orthant in Rm.

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 237
Using the Corollary stated in Section 1, we derive
Corollary 4.1. The polyhedral angle Rm+ (αm−k+1, . . . , αm) is invariant for
the system (1.2) in Rn+1T if and only if all nondiagonal elements of m−k+1-th,. . . ,
m-th rows of the matrix-valued functions Ajk and Aj, 1 ≤ j, k ≤ n, are equal tozero.
In particular, a half-plane R2+(α2) is invariant for the system (1.2) in Rn+1
T ifand only if all (2× 2)-matrix-valued functions Ajk and Aj, 1 ≤ j, k ≤ n, are uppertriangular.
Cylinders. Let
Rm− (βm−k+1, . . . , βm) = {u = (u1, . . . , um) : um−k+1 ≤ βm−k+1, . . . , um ≤ βm}
be a polyhedral angle and αm−k+1 < βm−k+1, . . . , αm < βm.Let us introduce a polyhedral cylinderCm(αm−k+1, . . . , αm;βm−k+1, . . . , βm) =
Rm+ (αm−k+1, . . . , αm) ∩Rm
− (βm−k+1, . . . , βm), k < m.In particular, Cm(αm;βm) is a layer and Cm(αm−1, αm;βm−1, βm) is a rect-
angular cylinder.
The following criterion stems from the Corollary stated in Section 1.
Corollary 4.2. The polyhedral cylinder Cm(αm−k+1, . . . , αm;βm−k+1, . . . , βm)is invariant for the system (1.2) in Rn+1
T if and only if all nondiagonal elements ofm− k + 1-th, m− k + 2-th,. . . , m-th rows of matrix-valued functions Ajk and Aj,1 ≤ j, k ≤ n, are equal to zero.
In particular, a strip C2(α2;β2) is invariant for the system (1.2) in Rn+1T if
and only if all (2× 2)-matrix-valued functions Ajk and Aj, 1 ≤ j, k ≤ n, are uppertriangular.
Let us introduce the set
Smk (R) = {u = (u1, . . . , um) : u2
m−k+1 + · · ·+ u2m ≤ R2},
which is a spherical cylinder for k < m.Using the Corollary stated in Section 1, we arrive at the following criterion.
Corollary 4.3. The set Smk (R) is invariant for the system (1.2) in Rn+1
T ifand only if:
(i) all nondiagonal elements of m− k + 1-th, m− k + 2-th,. . . , m-th rows ofmatrix-valued functions Ajk and Aj , 1 ≤ j, k ≤ n, are equal to zero;
(ii) all m− k + 1-th, m− k + 2-th,. . . , m-th diagonal elements of the matrixAjk(x)
(Aj(x)
)are equal for any fixed point x ∈ Rn and indices j, k =
1, . . . , n.
Cones. By Kmp , we denote a convex polyhedral cone in Rm with p facets. Let,
further, {ν1, . . . ,νp} be the set of unit outward normals to the facets of this cone.By [v1, . . . ,vm], we mean the (m × m)-matrix whose columns are m-componentvectors v1, . . . ,vm.
We give an auxiliary assertion having a geometric flavor.
Lemma 4.1. Let Kmp be a convex polyhedral cone in Rm with p facets, p ≥ m.
Then any system ν1, . . . ,νm of unit outward normals to m different facets of Kmp
is linear independent.

238 GERSHON KRESIN AND VLADIMIR MAZ’YA
Proof. By Fi, we denote the facet of Kmp for which the vector νi is normal,
1 ≤ i ≤ m. Let Ti be the supporting plane of this facet. We place the origin of thecoordinate system with the orthonormal basis e1, . . . , em at an interior point O ofKm
p and use the notation x = Oq, where q is the vertex of the cone. Further, letdi = dist (O, Fi), i = 1, . . . ,m. Since
q =m⋂i=1
Ti ,
it follows that x = (x1, . . . , xm) is the only solution of the system
(νi, x) = di, i = 1, 2, . . . ,m,
or, which is the same,m∑j=1
(νi, ej)xj = di, i = 1, 2, . . . ,m.
The matrix of this system is [ν1, . . . ,νm]∗. Consequently,
det[ν1, . . . ,νm]∗ �= 0.
This implies the linear independence of the system ν1, . . . ,νm. �Corollary 4.4. The convex polyhedral cone Km
m is invariant for the system(1.2) in Rn+1
T if and only if
(4.1) Ajk(x) =([ν1, . . . ,νm]∗
)−1 Djk(x) [ν1, . . . ,νm]∗
and
(4.2) Aj(x) =([ν1, . . . ,νm]∗
)−1 Dj(x) [ν1, . . . ,νm]∗
for all x ∈ Rn, 1 ≤ j, k ≤ n, where Djk and Dj are diagonal (m×m)-matrix-valuedfunctions.
The convex polyhedral cone Kmp with p > m and convex cone with a smooth
guide are invariant for the system (1.2) in Rn+1T if and only if all matrix-valued
functions Ajk and Aj, 1 ≤ j, k ≤ n, are scalar.
Proof. We fix a point x ∈ Rn. By A, we denote any of the (m×m)-matricesAjk(x) and Aj(x), 1 ≤ j, k ≤ n.
By the Corollary stated in Section 1, a necessary and sufficient condition forinvariance of S is equation
(4.3) A∗ν = μν for any ν ∈ NS,
where μ = μ(ν) is a real number.
(i) If S = Kmm, we write (4.3) as
(4.4) A∗ν1 = μ1ν1, . . . ,A∗νm = μmνm ,
where {ν1, . . . ,νm} is the set of unit outward normals to the facets of the Kmm.
These normals are linear independent by Lemma 4.1. Let D = diag {μ1, . . . , μm}.Equations (4.4) can be written as
A∗[ν1, . . . ,νm] = [ν1, . . . ,νm] D,
which leads to the representation
(4.5) A =([ν1, . . . ,νm]∗
)−1 D [ν1, . . . ,νm]∗ .

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 239
Now, (4.5) is equivalent to (4.1) and (4.2).
(ii) Let us consider the cone Kmp with p > m. By {ν1, . . . ,νm}, we denote
a system of unit outward normals to m facets of Kmp . Let also ν be a normal
to a certain m+1-th facet. By Lemma 4.1, arbitrary m vectors in the collection{ν1, . . . ,νm,ν} are linear independent. Hence there are no zero coefficients αi inthe representation ν = α1ν1 + · · ·+ αmνm.
Let (4.3) hold. Then
(4.6) A∗ν = λν, A∗ν1 = μ1ν1, . . . ,A∗νm = μmνm .
Therefore,
λ
m∑i=1
αiνi = λν = A∗ν = A∗m∑i=1
αiνi =
m∑i=1
αiμiνi.
Thus,m∑i=1
(λ− μi)αiνi = 0.
Hence, μi = λ for i = 1, . . . ,m, and consequently A is a scalar matrix.Conversely, if A = λ diag {1, . . . , 1}, then (4.3) with μ = λ holds for S = Km
p
with p > m.The proof is complete for p > m.
(iii) Let (4.3) hold for the cone K with a smooth guide. This cone K can beinscribed into a polyhedral cone Km
m+1. Let {ν1, . . . ,νm,ν} be a system of unitoutward normals to the facets of Km
m+1. This system is a subset of the collectionof normals to the boundary of K. By Lemma 4.1, arbitrary m vectors in the set{ν1, . . . ,νm,ν} are linear independent. Repeating word by word the argumentused in (ii) we arrive at the scalarity of A.
Conversely, (4.3) is an obvious consequence of the scalarity of A for S = K.The proof is complete. �
References
[1] Nicholas D. Alikakos, Remarks on invariance in reaction-diffusion equations, Nonlinear Anal.5 (1981), no. 6, 593–614, DOI 10.1016/0362-546X(81)90077-8. MR618214 (82f:35093)
[2] Nicholas D. Alikakos, Quantitative maximum principles and strongly coupled gradient-likereaction-diffusion systems, Proc. Roy. Soc. Edinburgh Sect. A 94 (1983), no. 3-4, 265–286,DOI 10.1017/S030821050001564X. MR709721 (84g:35083)
[3] Herbert Amann, Invariant sets and existence theorems for semilinear parabolic and ellipticsystems, J. Math. Anal. Appl. 65 (1978), no. 2, 432–467, DOI 10.1016/0022-247X(78)90192-0.MR506318 (80b:35083)
[4] P. W. Bates, Containment for weakly coupled parabolic systems, Houston J. Math. 11 (1985),no. 2, 151–158. MR792191 (86j:35096)
[5] J. W. Bebernes, K. N. Chueh, and W. Fulks, Some applications of invariance for parabolicsystems, Indiana Univ. Math. J. 28 (1979), no. 2, 269–277, DOI 10.1512/iumj.1979.28.28019.MR523104 (80b:35084)
[6] J. W. Bebernes and K. Schmitt, Invariant sets and the Hukuhara-Kneser property for systemsof parabolic partial differential equations, Proceedings of the Regional Conference on theApplication of Topological Methods in Differential Equations (Boulder, Colo., 1976), RockyMountain J. Math. 7 (1977), no. 3, 557–567. MR0600519 (58 #29092)
[7] K. N. Chueh, C. C. Conley, and J. A. Smoller, Positively invariant regions for systems ofnonlinear diffusion equations, Indiana Univ. Math. J. 26 (1977), no. 2, 373–392. MR0430536(55 #3541)

240 GERSHON KRESIN AND VLADIMIR MAZ’YA
[8] Edward Conway, David Hoff, and Joel Smoller, Large time behavior of solutions of sys-tems of nonlinear reaction-diffusion equations, SIAM J. Appl. Math. 35 (1978), no. 1, 1–16.MR0486955 (58 #6637)
[9] Chris Cosner and Philip W. Schaefer, On the development of functionals which satisfy amaximum principle, Appl. Anal. 26 (1987), no. 1, 45–60, DOI 10.1080/00036818708839700.MR916898 (89a:35037)
[10] S. D. Eıdel′man, Parabolic systems, Translated from the Russian by Scripta Technica, London,North-Holland Publishing Co., Amsterdam-London; Wolters-Noordhoff Publishing, Gronin-gen, 1969. MR0252806 (40 #6023)
[11] A.M. Il’in, A.S. Kalashnikov and O.A. Oleinik, Linear equations of the second order of par-abolic type, Russian Math. Surveys 17 (1962), no. 3, 1–143.
[12] Gershon I. Kresin and Vladimir G. Maz′ya, Criteria for validity of the maximum modulusprinciple for solutions of linear parabolic systems, Ark. Mat. 32 (1994), no. 1, 121–155, DOI10.1007/BF02559526. MR1277923 (95e:35031)
[13] G. I. Kresin and V. G. Maz’ya, On the maximum principle with respect to smooth normsfor linear strongly coupled parabolic systems, Funct. Differ. Equ. 5 (1998), no. 3-4, 349–376.
International Conference on Functional Differential Equations (Ariel, 1998). MR1759056(2001c:35043)
[14] Gershon I. Kresin and Vladimir G. Maz′ya, Criteria for validity of the maximumnorm principle for parabolic systems, Potential Anal. 10 (1999), no. 3, 243–272, DOI10.1023/A:1008691129898. MR1696136 (2000e:35084)
[15] Gershon Kresin and Vladimir Maz’ya, Maximum principles and sharp constants for solutionsof elliptic and parabolic systems, Mathematical Surveys and Monographs, vol. 183, AmericanMathematical Society, Providence, RI, 2012. MR2962313
[16] Hendrik J. Kuiper, Invariant sets for nonlinear elliptic and parabolic systems, SIAM J. Math.Anal. 11 (1980), no. 6, 1075–1103, DOI 10.1137/0511095. MR595833 (82b:35089)
[17] Roland Lemmert, Uber die Invarianz konvexer Teilmengen eines normierten Raumes inBezug auf elliptische Differentialgleichungen (German), Comm. Partial Differential Equa-tions 3 (1978), no. 4, 297–318. MR0481417 (58 #1534)
[18] V. G. Maz′ya and G. I. Kresin, The maximum principle for second-order strongly ellipticand parabolic systems with constant coefficients (Russian), Mat. Sb. (N.S.) 125(167) (1984),no. 4, 458–480. MR770901 (86f:35033)
[19] Ken’ichi Otsuka, On the positivity of the fundamental solutions for parabolic systems, J.Math. Kyoto Univ. 28 (1988), no. 1, 119–132. MR929213 (89d:35078)
[20] Murray H. Protter and Hans F. Weinberger, Maximum principles in differential equa-tions, Springer-Verlag, New York, 1984. Corrected reprint of the 1967 original. MR762825(86f:35034)
[21] Ray Redheffer and Wolfgang Walter, Invariant sets for systems of partial differential equa-tions. I. Parabolic equations, Arch. Rational Mech. Anal. 67 (1978), no. 1, 41–52, DOI10.1007/BF00280826. MR473317 (82h:35050)
[22] Ray Redheffer and Wolfgang Walter, Invariant sets for systems of partial differential equa-tions. II. First-order and elliptic equations, Arch. Rational Mech. Anal. 73 (1980), no. 1,19–29, DOI 10.1007/BF00283253. MR555580 (82h:35051)
[23] R. Tyrrell Rockafellar, Convex analysis, Princeton Mathematical Series, No. 28, PrincetonUniversity Press, Princeton, N.J., 1970. MR0274683 (43 #445)
[24] Christoph Schaefer, Invariant sets and contractions for weakly coupled systems of para-bolic differential equations, Rend. Mat. (6) 13 (1980), no. 3, 337–357 (1981). MR609478(82g:35058)
[25] Joel Smoller, Shock waves and reaction-diffusion equations, Grundlehren der MathematischenWissenschaften [Fundamental Principles of Mathematical Science], vol. 258, Springer-Verlag,New York-Berlin, 1983. MR688146 (84d:35002)
[26] Wolfgang Walter, Differential and integral inequalities, Translated from the German by Lisa
Rosenblatt and Lawrence Shampine. Ergebnisse der Mathematik und ihrer Grenzgebiete,Band 55, Springer-Verlag, New York-Berlin, 1970. MR0271508 (42 #6391)
[27] Hans F. Weinberger, Invariant sets for weakly coupled parabolic and elliptic systems (English,with Italian summary), Rend. Mat. (6) 8 (1975), 295–310. Collection of articles dedicated toMauro Picone on the occasion of his ninetieth birthday. MR0397126 (53 #986)

CRITERIA FOR INVARIANCE OF CONVEX SETS FOR PARABOLIC SYSTEMS 241
[28] H. F. Weinberger, Some remarks on invariant sets for systems, Maximum principles andeigenvalue problems in partial differential equations (Knoxville, TN, 1987), Pitman Res. NotesMath. Ser., vol. 175, Longman Sci. Tech., Harlow, 1988, pp. 189–207. MR963468 (89i:35029)
Department of Computer Science and Mathematics, Ariel University, Ariel 40700,
Israel
E-mail address: [email protected]
Department of Mathematical Sciences, University of Liverpool, M&O Building,
Liverpool L69 7ZL, United Kingdom
Department of Mathematics, Linkoping University, 58183 Linkoping, Sweden
E-mail address: [email protected]


Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13189
On an Extension of Harmonicity and Holomorphy
Julian �Lawrynowicz, Agnieszka Niemczynowicz,Ma�lgorzata Nowak-Kepczyk, and Luis Manuel Tovar Sanchez
Abstract. The concept of harmonicity and holomorphy related to the Laplaceequation Δs ≡ (∂2/∂x2)s + (∂2/∂y2)s = 0, (x, y) ∈ R2 is extended with theuse of
∂
∂ts = −Γs∗ + Λ(Δ+Δτ )s;(0)
Δ +Δ1 =∂2
∂x2− a2
∂2
∂τ2, Δ2 = −a2
∂2
∂τ2, Δ3 =
∂2
∂z2− a2
∂2
∂τ2,
Δ4 =∂2
∂z2+
∂2
∂ξ2− a2
∂2
∂τ2, Δ5 =
∂2
∂x2+
∂2
∂ξ2+
∂2
∂η2− a2
∂2
∂τ2,
where Γ and Λ are C1-scalar functions of (x, τ) ∈ R2, . . . , (x, y, z, ξ, η, τ) ∈ R6
for τ = 1, . . . , 5, respectively, t ∈ R, a ∈ R, and s∗ is an arbitrary admissiblefunction. We discuss the fundamental solutions for (0) (more precisely, of the
corresponding linearized problem) which is a parabolic equation of the secondkind. For effective solutions and τ ≡ 1, 2, 3, 4 (mod 8), it is convenient toinvolve the quaternionic structure, for τ ≡ 5, 6, 7, 0 (mod 8) - the paraquater-nionic structure. Physically, it is natural to describe with help of (0) relaxationprocesses attaching (x, y, z) to the first chosen parricle, (ξ, η, ζ) - to the secondone, τ to temperature, entropy or order parameter, and t - to time.
1. Motivation and posing of the problem
The Laplace equation
(1) Δs ≡(
∂2
∂x2+
∂2
∂y2
)s = 0
generating harmonic functions can be linearized with the help of familiar operators ∂and ∂ leading to holomorphic functions. We have to extend s to an n(τ )-dimensionalvector
(2)s = (s, s0) ∈ R2 ( C for τ = 1, s = (s, s0, s1, s2) ∈ R4 ( C2 for τ = 2, 3,
s = (s0, s1, . . . , s6) ∈ R8 ( C4 for τ = 4, 5.
2010 Mathematics Subject Classification. Primary 35K10, 81R25, 32L25, 15A66, 47S10.Key words and phrases. Parabolic equation, (para)quaternionic structure, relaxation.The research was carried out in the framework of the Programme of Modelling of Dynamical
Processes directed by Prof. T. Kapitaniak (Polish Academy of Sciences and �Lodz TechnicalUniversity).
c©2015 The Authors
243

244 J. �LAWRYNOWICZ ET AL.
instead of s = (s, s0) ∈ R2 ( C corresponding to (1), and use two bases (cf. [3,13,22]):
(3) (ε, ε0, . . . , ετ ) for τ = 1, . . . , 5 (say)
instead of (ε, ε0) corresponding to (1), for the space S of variables
(4)(x, τ) for τ = 1, (x, y, τ) for τ = 2, (x, y, z, τ) for τ = 3,
(x, y, z, ξ, τ) for τ = 4, (x, y, z, ξ, η, τ) for τ = 5,
instead of (x, y) corresponding to (1), and
(5) (e, e0) for τ = 1, (e, e0, e1, e2) for τ = 2, 3, (e, e0, . . . , e4) for τ = 4, 5,
instead of (e, e0) corresponding to (1), for the space V of solution s.The resulting complex potential is particularly interesting in the case of an
electromagnetic field, requiring Riemann surfaces and involving lines of force thatmay densely cover a surface (for instance of a torus) [23]; [8, pp. 162-163];[7, pp. 211-213] (Fig. 1).
Figure 1. The vector !B = !B1 + !B2 of magnetic induction inthe case of composition of a circular current with a perpendicularstraight-line current.
A more sophisticated application concerns Josephson junction (Brian DavidJosephson, born 1940, Nobel Prize winner 1973 Nobel Lecture [5], original paper[4]); cf. also [20,21] (Fig. 2).
Our research focuses related dynamical systems and processes, and the corre-sponding linearization models: generalized harmonicity → generalized holomorphy[3, 2,6,9], and to relaxation and roughness [10,12, 14]. In this paper, our mainaim is to discuss the fundamental solutions for (0).
2. Fundamental solutions containing the addend (∂s∗)ε, (∂s∗)εα, (∂s∗)εετor (∂s∗)εαετ , α = 0, . . . , τ − 1
Substituting τ = aτ brings the equation (0) to
(6)∂
∂ts = −Γs∗ + Λ(Δ+Δτ )s;

ON AN EXTENSION OF HARMONICITY AND HOLOMORPHY 245
Figure 2. Different possibilities for !B in a superconductor-ferromagnet SQuID (Superconducting Quantum InterferenceDevice): S-superconductor, F-ferromagnet, O-another type ofmedium.
Δ +Δ1 =∂2
∂x2− ∂2
∂τ2, Δ2 = − ∂2
∂τ2, Δ3 =
∂2
∂z2− ∂2
∂τ2,
Δ4 =∂2
∂z2+
∂2
∂ξ2− ∂2
∂τ2, Δ5 =
∂2
∂x2+
∂2
∂ξ2+
∂2
∂η− ∂2
∂τ2.
Remark. As stated in the abstract, we suppose that a ∈ R and Γ, Λ are C1-scalar functions. Physically, in the most natural context of T. Oguchi theory ofstochastical relaxation (cf. [10, 12] and references therein), a = a/a, where a is theamplitude of the stochastic movement, and a is the lattice constant. The functionsΓ and Λ read:
Γ =1
τ
[1− 1
2
(1− 4 〈s〉2
) xτJ
kBT
], Λ =
a2
τ· 12
(1− 4 〈s〉2
) xτJ
kBT,
where xτ is the position of a fixed layer and τ = xτ+1 stands for the stochas-tic variable (temperature, entropy, or short range order parameter) responsiblefor the stochastic behaviour of the lattice, describing thermal oscillations of spin,〈s〉 denotes the canonical average of spin; it is supposed that it does not depend onthe position of a fixed layer xτ = xτ . Finally, J is the parameter of the theory re-sponsible for the interaction between two neighbouring spins, kB is the Boltzmannconstant, and T stands for the absolute temperature.
In particular, following [1, 19], we may take
s∗ = s0 ≡ −∫ t
0
∫ +∞
−∞
∫ +∞
−∞exp
[(x− x
′)2 − (τ − τ
′)2
4Λ(x′ , τ ′)(t− t′)
]× (Γs0)(x− x
′, τ − τ
′, t− t
′)dx
′dτ
′dt
′for τ = 1, . . . ,
s∗ = s0 ≡ −∫ t
0
∫ +∞
−∞
∫ +∞
−∞
∫ +∞
−∞
∫ +∞
−∞
∫ +∞
−∞
∫ +∞
−∞
× exp
[(x−x
′)2 + (y−y
′)2 + (z−z
′)2 + (ξ−ξ
′)2 + (η−η
′)2 − (τ−τ
′)2
4Λ(x′ , y′ , z′ , ξ′ , η′ , τ ′ , t′)(t− t′)
]
× (Γs0)(x−x′, y−y
′, z−z
′, ξ−ξ
′, η−η
′, τ−τ
′, t−t
′)
2√Λ(x′ , y′ , z′ , ξ′ , η′ , τ ′ , t′)(t− t′)
dx′dy
′dz
′dξ
′dη
′dτ
′dt
′
for τ = 5.

246 J. �LAWRYNOWICZ ET AL.
We observe that
(ε, ε0, . . . , ετ ) consists of 2× 2−matrices for τ = 1,4× 4−matrices for τ = 2, 3,8× 8−matrices for τ = 4, 5.
They have to satisfy the relations
ε2 = ε, ε20 = ε, ε21 = 0, ε0ε1 + ε1ε0 = 0 for τ = 1,
ε2 = −ε0, ε20 = ε0, ε21 = ε0, ε22 = 0,εεα + εαε = 0, εαεβ + εβεα = 0, α, β = 1, 2 for τ = 2,
ε2 = −ε0, ε2α = ε0, α = 1, 2, ε23 = 0,εεα + εαε = 0, εαεβ + εβεα = 0, α, β = 1, 2, 3 for τ = 3,
ε2 = −ε0, ε2α = ε0, α = 1, 2, 3, ε24 = 0,εεα + εαε = 0, εαεβ + εβεα = 0, α, β = 1, . . . , 4 for τ = 4,
ε2 = −ε0, ε2α = ε0, α = 1, . . . , 4; ε25 = 0,εεα + εαε = 0, εαεβ + εβεα = 0, α, β = 1, . . . , 5 for τ = 5.
For instance, in the case of τ = 1, we may take
ε = I2 = 1, ε0 =
(i 00 −i
)= k = iσ3,
ε1 =
(0 i0 0
)=
1
2(i− 1
ij) =
1
2i(σ1 + iσ2),
where σ1, σ2, σ3 are generators of the Pauli algebra. The algebra constructed isknown as the Clifford-Grassmann algebra Cl∗01,τ−1(C). For τ ≡ 5, 6, 7, 0 (mod 8),the use of para-quaternions appears to be more convenient for solving (6) effectivelythan the use of quaternions [10,11,13,16]; cf. also [17,18].
The counterparts of the familiar ∂ and ∂-operators known from the complexanalysis are chosen so that they satisfy the condition
(7) ∂∂s = Γ(Δ+Δτ )s;
for an explicit choice we refer to [1,10,19]. Direct calculation leads to the followingresult:
Theorem 1. We have the following fundamental solutions for equation (6)containing the addend (∂s0)ε, (∂s0)εα, (∂s0)εεα or (∂s0)εαετ , α = 0, . . . , τ − 1:
For τ = 1 : sx = (∂s0)ε, sxt = s0ε+ (∂s0)εε1,sτ = (∂s0)ε0; sτ t = s0ε0 + (∂s0)ε0ε1.
For τ = 2 : sx = (∂s0)ε, sxt = s0ε+ (∂s0)εε2,sy = (∂s0)ε0, syt = s0ε0 + (∂s0)ε0ε2,sτ = (∂s0)ε1; sτ t = s0ε1 + (∂s0)ε1ε2.
For τ = 3 : sx = (∂s0)ε, sxt = s0ε+ (∂s0)εε3,sy = (∂s0)ε0, syt = s0ε0 + (∂s0)ε0ε3,sz = (∂s0)ε1, szt = s0ε1 + (∂s0)ε1ε3,sτ = (∂s0)ε2; sτ t = s0ε2 + (∂s0)ε2ε3.

ON AN EXTENSION OF HARMONICITY AND HOLOMORPHY 247
For τ = 4 : sx = (∂s0)ε, sxt = s0ε+ (∂s0)εε4,sy = (∂s0)ε0, syt = s0ε0 + (∂s0)ε0ε4,sz = (∂s0)ε1, szt = s0ε1 + (∂s0)ε1ε4,sξ = (∂s0)ε2, sξt = s0ε2 + (∂s0)ε2ε4,sτ = (∂s0)ε3; sτ t = s0ε3 + (∂s0)ε3ε4.
For τ = 5 : sx = (∂s0)ε, sxt = s0ε+ (∂s0)εε5,sy = (∂s0)ε0, syt = s0ε0 + (∂s0)ε0ε5,sz = (∂s0)ε1, szt = s0ε1 + (∂s0)ε1ε5,sξ = (∂s0)ε2, sξt = s0ε2 + (∂s0)ε2ε5,sη = (∂s0)ε3, sηt = s0ε3 + (∂s0)ε3ε5,sτ = (∂s0)ε4; sτ t = s0ε4 + (∂s0)ε4ε5.
3. Fundamental solutions containing the addend (∂s∗)εεα or (∂s∗)εεαετ ,α = 0, . . . , τ − 1
Next we find, by direct calculations, the fundamental solutions for (6) of theform as stated above with s∗ = s0.
Theorem 2. We have the following fundamental solutions for equation (6)containing the addend (∂s0)εεα or (∂s0)εεαετ , α = 0, . . . , τ − 1:
For τ = 1 : sxτ = (∂s0)εε0, sxτt = −s0εε0 + (∂s0)εε0ε1.
For τ = 2 : sxy = (∂s0)εε0, sxyt = −s0εε0 + (∂s0)εε0ε2,sxτ = (∂s0)εε1; sxτt = −s0εε1 + (∂s0)εε1ε2.
For τ = 3 : sxy = (∂s0)εε0, sxyt = −s0εε0 + (∂s0)εε0ε3,sxz = (∂s0)εε1, sxzt = −s0εε1 + (∂s0)εε1ε3,sxτ = (∂s0)εε2; sxτt = −s0εε2 + (∂s0)εε2ε3.
For τ = 4 : sxy = (∂s0)εε0, sxyt = −s0εε0 + (∂s0)εε0ε4,sxz = (∂s0)εε1, sxzt = −s0εε1 + (∂s0)εε1ε4,sxξ = (∂s0)εε2, sxξt = −s0εε2 + (∂s0)εε2ε4,sxτ = (∂s0)εε3; sxτt = −s0εε3 + (∂s0)εε3ε4.
For τ = 5 : sxy = (∂s0)εε0, sxyt = −s0εε0 + (∂s0)εε0ε5,sxz = (∂s0)εε1, sxzt = −s0εε1 + (∂s0)εε1ε5,sxξ = (∂s0)εε2, sxξt = −s0εε2 + (∂s0)εε2ε5,sxη = (∂s0)εε3, sxηt = −s0εε3 + (∂s0)εε3ε5,sxτ = (∂s0)εε4; sxτt = −s0εε4 + (∂s0)εε4ε5.
4. Fundamental solutions containing the addend (∂s∗)ε0εα or(∂s∗)ε0εαετ , α = 1, . . . , τ − 1
In analogy, we proceed to the fundamental solutions for (6) of the form statedas above with s∗ = s0. We get
Theorem 3. We have the following fundamental solutions for equation (6)containing the addend (∂s0)ε0εα or (∂s0)ε0εαετ , α = 1, . . . , τ − 1:
For τ = 1 : no solutions
For τ = 2 : syτ = (∂s0)ε0ε1; syτ t = −s0ε0ε1 + (∂s0)ε0ε1ε2.
For τ = 3 : syz = (∂s0)ε0ε1, syzt = −s0ε0ε1 + (∂s0)ε0ε1ε3,syτ = (∂s0)ε0ε2; syτ t = −s0ε0ε2 + (∂s0)ε0ε2ε3.

248 J. �LAWRYNOWICZ ET AL.
For τ = 4 : syz = (∂s0)ε0ε1, syzt = −s0ε0ε1 + (∂s0)ε0ε1ε4,syξ = (∂s0)ε0ε2, syξt = −s0ε0ε2 + (∂s0)ε0ε2ε4,syτ = (∂s0)ε0ε3; syτ t = −s0ε0ε3 + (∂s0)ε0ε3ε4.
For τ = 5 : syz = (∂s0)ε0ε1, syzt = −s0ε0ε1 + (∂s0)ε0ε1ε5,syξ = (∂s0)ε0ε2, syξt = −s0ε0ε2 + (∂s0)ε0ε2ε5,syη = (∂s0)ε0ε3, syηt = −s0ε0ε3 + (∂s0)ε0ε3ε5,syτ = (∂s0)ε0ε4; syτ t = −s0ε0ε4 + (∂s0)ε0ε4ε5.
5. Fundamental solutions containing the addend (∂s∗)ε1εα or(∂s∗)ε1εαετ , α = 2, . . . , τ − 1
We turn our attention now to the fundamental solutions for (6) of the formstated as above with s∗ = s0. As a result, we obtain
Theorem 4. We have the following fundamental solutions for equation (6)containing the addend (∂s0)ε1εα or (∂s0)ε1εαετ , α = 2, . . . , τ − 1:
For τ = 1 and τ = 2 : no solutions.
For τ = 3 : szτ = (∂s0)ε1ε2; szτ t = −s0ε1ε2 + (∂s0)ε1ε2ε3.
For τ = 4 : szξ = (∂s0)ε1ε2, szξt = −s0ε1ε2 + (∂s0)ε1ε2ε4,szτ = (∂s0)ε1ε3; szτ t = −s0ε1ε3 + (∂s0)ε1ε3ε4.
For τ = 5 : szξ = (∂s0)ε1ε2, szξt = −s0ε1ε2 + (∂s0)ε1ε2ε5,szη = (∂s0)ε1ε3, szηt = −s0ε1ε3 + (∂s0)ε1ε3ε5,szτ = (∂s0)ε1ε4; szτ t = −s0ε1ε4 + (∂s0)ε1ε4ε5.
6. Fundamental solutions containing the addend (∂s∗)ε2εα or(∂s∗)ε2εαετ , α = 3, . . . , τ − 1
We pass to the fundamental solutions for (6) of the form stated as above withs∗ = s0. We arrive at
Theorem 5. We have the following fundamental solutions for equation (6)containing the addend (∂s0)ε2εα or (∂s0)ε2εαετ , α = 3, . . . , τ − 1:
For τ = 1, 2, 3 : no solutions.
For τ = 4 : sξτ = (∂s0)ε2ε3; sξτ t = −s0ε2ε3 + (∂s0)ε2ε3ε4.
For τ = 5 : sξη = (∂s0)ε2ε3, sξηt = −s0ε2ε3 + (∂s0)ε2ε3ε5,sξτ = (∂s0)ε2ε4; sξτ t = −s0ε2ε4 + (∂s0)ε2ε4ε5.
7. Fundamental solutions containing the addend (∂s∗)ε3εα or(∂s∗)ε3εαετ , α = τ − 1 = 4
Finally we obtain, by direct calculation, the fundamental solutions for (6) ofthe form stated as above with s∗ = s0.
Theorem 6. We have the following fundamental solutions for equation (6)containing the addend (∂s0)ε3εα or (∂s0)ε3εαετ , α = τ − 1 = 4:
For τ = 1, 2, 3, 4 : no solution.
For τ = 5 : sητ = (∂s0)ε3ε4; sητt = −s0ε3ε4 + (∂s0)ε3ε4ε5.

ON AN EXTENSION OF HARMONICITY AND HOLOMORPHY 249
8. Conclusion
It is not difficult to verify that Theorems 1 – 6 list all the fundamental solutionsfor (6) with τ = 1, . . . , 5, so that we may summarize our paper with the following
Remark. Equation (0) generates (τ + 1)(τ + 2) fundamental solutions.
The physical interpretation of particular fundamental solutions for (6), men-tioned in Theorems 1-6, namely 2(τ + 1) + 2τ + . . .+ 2(τ − 4) + . . . , is developedin [10,13,15].
Acknowledgement. The authors are grateful to Profs. Hariton Polatoglouand Leszek Wojtczak for valuable discussions.
References
[1] Thierry Aubin, Julian �Lawrynowicz, and Leszek Wojtczak, Nonlinear parabolic equations,relaxation and roughness, Bull. Sci. Math. 127 (2003), no. 8, 689–703, DOI 10.1016/S0007-4497(03)00059-9. MR2014754 (2005h:35159)
[2] Mark Elin, Dmitry Khavinson, Simeon Reich, and David Shoikhet, Linearization models for
parabolic dynamical systems via Abel’s functional equation, Ann. Acad. Sci. Fenn. Math. 35(2010), no. 2, 439–472, DOI 10.5186/aasfm.2010.3528. MR2731701 (2012e:30029)
[3] Mark Elin and David Shoikhet, Linearization models for complex dynamical systems: Top-ics in univalent functions, functional equations and semigroup theory, Operator Theory:Advances and Applications, vol. 208, Birkhauser Verlag, Basel, 2010. Linear Operators andLinear Systems. MR2683159 (2012c:30042)
[4] B. D. Josephson, Possible new effects in superconductive tunnelling, Phys. Lett. 1 (1961),251–253.
[5] B. D. Josephson, The discovery of tunnelling supercurrents, Nobel Lecture 1973 in Physics,The Royal Swedish Academy of Sciences, Stockholm, 1973.
[6] Yuri Kondratiev, Yuri Kozitsky, and David Shoikhet, Dynamical systems on sets ofholomorphic functions, Complex analysis and dynamical systems IV. Part 1, Con-temp. Math., vol. 553, Amer. Math. Soc., Providence, RI, 2011, pp. 139–153, DOI10.1090/conm/553/10937. MR2868593 (2012m:47074)
[7] Julian �Lawrynowicz, Variationsrechnung und Anwendungen (German), Springer-Verlag,Berlin, 1986. Translated from the Polish by Diethard Pallaschke. MR843331 (87f:49001)
[8] Julian �Lawrynowicz, Quasiconformal mappings in the plane: Parametrical methods, LectureNotes in Mathematics, vol. 978, Springer-Verlag, Berlin-New York, 1983. In cooperation withJan Krzyz. MR702025 (84h:30027)
[9] Julian �Lawrynowicz, Pertti Lounesto, and Osamu Suzuki, An approach to the 5-, 9-, and 13-dimensional complex dynamics. III. Triality aspects (English, with Polish summary), Bull.Soc. Sci. Lett. �Lodz Ser. Rech. Deform. 34 (2001), 91–119. MR2041390 (2005i:81065)
[10] Julian �Lawrynowicz, Stefano Marchiafava, F. L. Castillo Alvarado, and Agnieszka Niem-
czynowicz, (Para)quaternionic geometry, harmonic forms, and stochastical relaxation, Publ.Math. Debrecen 84 (2014), no. 1-2, 205–220. MR3194782
[11] Julian �Lawrynowicz, Stefano Marchiafava, and Ma�lgorzata Nowak-Kepczyk, Periodicity the-orem for structure fractals in quaternionic formulation, Int. J. Geom. Methods Mod. Phys.3 (2006), no. 5-6, 1167–1197, DOI 10.1142/S021988780600165X. MR2264410 (2008b:15089)
[12] Julian �Lawrynowicz, Ma�lgorzata Nowak-Kepczyk, and Osamu Suzuki, Fractals and chaosrelated to Ising-Onsager-Zhang lattices versus the Jordan-von Neumann-Wigner procedures.Quaternary approach, Internat. J. Bifur. Chaos Appl. Sci. Engrg. 22 (2012), no. 1, 1230003,19, DOI 10.1142/S0218127412300030. MR2901771
[13] J. �Lawrynowicz and H. Polatoglou, The relaxation and stochastical relaxation problems incrystals in terms of para-quaternions, Acta Phys. Superfic. 12 (2012), 97–107.
[14] Julian �Lawrynowicz, Lino Feliciano Resendis Ocampo, and Luis Manuel Tovar Sanchez, Qp-hyperholomorphic functions and harmonic majorants in the quaternionic case (English, withEnglish and Polish summaries), Bull. Soc. Sci. Lett. �Lodz Ser. Rech. Deform. 41 (2003), 37–47. MR2180752 (2006k:30048)

250 J. �LAWRYNOWICZ ET AL.
[15] J. �Lawrynowicz, O. Suzuki, and F. L. Castillo Alvarado, Basic properties and applications ofgraded fractal bundles related to Clifford structures: an introduction (English, with Englishand Ukrainian summaries), Ukraın. Mat. Zh. 60 (2008), no. 5, 603–618, DOI 10.1007/s11253-008-0082-z; English transl., Ukrainian Math. J. 60 (2008), no. 5, 692–707. MR2485218
[16] Julian �Lawrynowicz and Massimo Vaccaro, Structure fractals and para-quaternionic ge-ometry, Ann. Univ. Mariae Curie-Sk�lodowska Sect. A 65 (2011), no. 2, 63–73, DOI10.2478/v10062-011-0014-5. MR2869269
[17] S. Marchiafava, Twistor theory for CR quaternionic manifolds: a report (English, with Eng-lish and Polish summaries), Bull. Soc. Sci. Lett. �Lodz Ser. Rech. Deform. 62 (2012), no. 1,43–53. MR3220276
[18] E. Martinelli, Varietes a structure quaternionienne generalisee (French), Rev. RoumaineMath. Pures Appl. 10 (1965), 915–922. MR0205187 (34 #5021)
[19] Elena Obolashvili, Partial differential equations in Clifford analysis, Pitman Monographsand Surveys in Pure and Applied Mathematics, vol. 96, Longman, Harlow, 1998. MR1697655(2000g:35002)
[20] K. Pomorski, Towards the determination of properties of the unconventional Josephson junc-tion made by putting nonsuperconducting strip on the top of superconducting strip, ElectronicJ. Theoret. Phys. 7 (2010), no. 23, 85–121, especially p. 117.
[21] Krzysztof Pomorski and Przemys�law Prokopow, Numerical solutions of nearly time-independent Ginzburg-Landau equation for various superconducting structures (English, withEnglish and Polish summaries), Bull. Soc. Sci. Lett. �Lodz Ser. Rech. Deform. 62 (2012), no. 2,117–132. MR3205414
[22] H. Risken, The Fokker-Planck equation: Methods of solution and applications, 2nd ed.,Springer Series in Synergetics, vol. 18, Springer-Verlag, Berlin, 1989. MR987631 (90a:82002)
[23] I. E. Tamm, Foundations of the Theory of Electricity [in Russian], 8th ed., Izdatelstwo”Nauka”, Moscow, 1966.
Faculty of Physics and Applied Informatics, University of �Lodz, Pomorska 149/153,
PL-90-236 �Lodz, Poland, and Institute of Mathematics, Polish Academy of Sciences,
Sniadeckich 8, P.O.B. 21, PL-00-956 Warszawa, Poland
E-mail address: [email protected]
Department of Relativity Physics, University of Warmia and Mazury, S�loneczna 54,
PL-10-710 Olsztyn, Poland
E-mail address: [email protected]
Institute of Mathematics and Information Technology, State School of Higher
Education in Che�lm, Pocztowa 54, PL-22-100 Che�lm, Poland
E-mail address: [email protected]
Escuela Superior de Fısica y Matematicas, Instituto Politecnico Nacional, Edifi-
cio 9, U.P. ”Adolfo Lopez Mateos”, 07738 Mexico, D.F., Mexico
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13190
Large Data Solutions for Critical SemilinearWeakly Hyperbolic Equations
Sandra Lucente
Abstract. We prove a global existence result for large data smooth radialsolutions of the weakly hyperbolic equation
utt(x, t)− |t0 − t|λΔxu(x, t) = −u(x, t)|u(x, t)|pc−1 x ∈ R3,
where pc = (3λ + 10)/(3λ + 2) and 3 ≤ pc ≤ 5 is the superconformal andSobolev-critical exponent.
1. Introduction
The aim of this paper is to prove the existence of the classical global radial(real) solution for the Cauchy Problem
(1.1)
⎧⎨⎩ utt(x, t)− |t0 − t|λΔxu(x, t) = −u(x, t)|u(x, t)|pc−1, x ∈ R3,u(x, 0) = u0(x),ut(x, 0) = u1(x),
where t0 > 0, u0(x) = u0(|x|), u1(x) = u1(|x|) and
pc =3λ+ 10
3λ+ 2, 3 ≤ pc ≤ 5.
This means that we deal with a semilinear wave equation having variable andvanishing speed of propagation, large data and polynomial nonlinear term suchthat f(u)u ≥ 0.
Let us notice that for λ = 0 and n = 3 we have the critical wave equation
utt −Δu = −u5.
In [Ra], Rauch established the global existence for the critical wave equation withsmall data. Localizing his result, in [S], Struwe removed this hypothesis requiringradial initial data. Grillakis [G2] succeeded to consider also non-radial solutions.By means of suitable Strichartz type estimates, the n-dimensional case was coveredby different authors, see [S2] and [SS] for the complete bibliography on this subject.For the supercritical 3D case, some sufficient conditions in terms of the Sobolevnorm of the solution have been given by Kenig and Merle in [KM].
2010 Mathematics Subject Classification. Primary 35L70; Secondary 35L15, 35L80.Key words and phrases. Global existence, semilinear weakly hyperbolic equations.Supported by a GNAMPA Research Project of the Istituto Nazionale di Alta Matematica
(INdAM).
c©2015 S. Lucente
251

252 SANDRA LUCENTE
The global existence result for the 3D weakly hyperbolic equation
utt − a(t)Δu = −u|u|p−1, a(t) ≥ 0
was established first by P. D’Ancona in [D], for real analytic a(t) with greatestorder of the zeroes λ > 0 and p < pc. In [DD] one can find some results onthe global existence theory for the space dimension n = 1, 2. We deduce that thecritical exponent still depends on the space dimension, but also it depends on λ.The critical three-dimensional case p = pc(λ, 3) has been studied in [FL] underthe following conditions: a smallness assumption on the initial data and the super-conformal exponents pc(λ, 3) ≥ 3. In some sense, Rauch’s result has been extended.The aim of the present paper is to remove such smallness assumption at least inthe radial case.
In Galstian’s paper [G], one can find some results in one dimension. To the bestof our knowledge, in the literature one cannot find the needed Strichartz estimatefor (1.1) in dimension n ≥ 4 or for n = 3 and λ < 1. Reissig and Yagdjianobtained Lp − Lq estimates for a class of weakly hyperbolic equations, but suchestimates cannot be used for (1.1) since they require the smoothness assumptionof the propagation speed in contrast with the superconformal hypotheses on thenonlinearity which is equivalent to 0 ≤ λ ≤ 2/3. Indeed, the approach containedfor example in [Re] and in [Y1] is based on the explicit fundamental solution of∂tt − t�Δ with � ∈ N.
As a conclusion, due to the lack of the suitable Strichartz estimates, in the largedata critical case, we can not remove the radial hypotheses on the initial data, norconsider dimensions n ≥ 4.
Finally, we recall that below the conformal critical exponent some non-existenceresults are known for utt − |t|λΔu = f(u), λ > 0, see [DmL] and [DbL].
Local existence and uniqueness for the classical solution of (1.1) was obtained inthe proof of Proposition 2.1 of [DD]. It remains to prove the global existence resultfor the critical case. To this aim, the tool of choice is a Liouville transformation(see Section 2.1) which leads from our equation to a wave equation with a masstime-dependent term. Passing through an Euler type integral equation and usinghigher order energy estimates, Struwe’s idea applies to (1.1), and we can establishour main result.
Theorem. Let t0 > 0. Let 3 ≤ pc =3λ+103λ+2 ≤ 5 and u0, u1 ∈ C∞(R3) be radial,
compactly supported initial data: u0(x) = u0(|x|), u1(x) = u1(|x|).For any t > 0, there exists a unique solution u(x, t) ∈ C2(R3 × [0, t]) for
the Cauchy Problem (1.1). Moreover, u(x, t) is radially symmetric in x-variable:u(x, t) = u(|x|, t).
1.1. Brief discussion on the critical exponent. We mention that ourresult includes a global existence result for the Gellerstedt type equation
Gλ(v) = −v|v|p−1, Gλ = ∂tt − |t|λΔx x ∈ R3
with initial data v(x,−t0) = v0(x), vt(x,−t0) = v1(x) and t0 > 0. It is possible torelate Gλ to a Grushin or Tricomi type operator. Let us notice that
Gλ(u(Rx,R2
λ+2 t)) = R4
λ+2 (Gλu)(Rx,R2
λ+2 t).
From this, we deduce that the semilinear equation
Gλ(u) = −u|u|p−1

LARGE DATA SOLUTIONS 253
is invariant under the transformation
u→ uR = Rβu(Rx,R2
λ+2 t), β =4
(λ+ 2)(p− 1).
To our equation, we associate the energy functional
E[u](t) =
∫ |ut(t)|22
dx+ |t|λ∫ |∇u(x, t)|2
2dx+
∫ |u(x, t)|p+1
p+ 1dx
=: I[u](t) + II[u](t) + III[u](t).
(see Section 2.3). We see that
I[uR](t) = R2β+ 4λ+2−nI[u](R
2λ+2 t),
and similarly
II[uR](t) = R2β+2− 2λλ+2−nII[u](R
2λ+2 t) = R2β+ 4
λ+2−nII[u](R2
λ+2 t).
For the last term, we find
III[uR](t) = Rβ(p+1)−nIII[uR](R2
λ+2 t).
Thanks to the choice of β, the exponents coincide and
E[uR](t) = R4
λ+2 (1+2
p−1 )−nE[u](R2
λ+2 t).
In particular, the energy is invariant with respect to the given transformation ifand only if 4
λ+2 (1 +2
p−1 )− n = 0. This gives
pc(λ, n) = 1 +8
n(λ+ 2)− 4
whenever n(λ+ 2)− 4 �= 0. For n = 3 we gain pc = (3λ+ 10)/(3λ+ 2).Another argument leads to the same conjecture on the critical exponent. Let
x ∈ Rd and y ∈ Rk. An operator Lh(x, y,Dx, Dy) is called quasi-homogeneous oforder (h, δ1, δ2) if it has order h and it satisfies
L(f(Rδ1 ·, Rδ2 ·))(x, y) = Rh(Lf)(Rδ1x,Rδ2y), for any R > 0 and f ∈ D(L),
where δ1, δ2 > 0. The quantity Q = δ1d + δ2k is called the quasi-homogeneousdimension associated to the operator L. In some sense, it plays the role of the totalspace dimension (see for example [DmL]). The operator Gλ is a quasi-homogeneousoperator of order (2, (λ+ 2)/2, 1), and it has quasi-homogeneous dimension
Q = nλ+ 2
2+ 1.
Let us recall that for λ = 0 and n ≥ 3 we have the critical Sobolev embeddingH1(Rn) ↪→ Lpc+1(Rn): pc(0, n) + 1 = 2n/(n − 2) = 2∗((n + 1) − 1). We seethat pc(λ, n) + 1 = 2∗(Q − 1). For this reason our exponent is critical in Sobolevembedding sense.
1.2. Other extensions. One can take more general nonlinear terms. Forexample, in [L], the following equation has been considered
utt − |t− t0|λ1Δu = −|t− t0|λ2u|u|p
with subcritical or critical nonlinear term and small energy initial data.Another result in this direction is given in [Y2], where the author deals with
small data solutions of utt − t�Δu = Γ(t)F (u) with � ∈ N and F (u) a nonlocalperturbation.

254 SANDRA LUCENTE
1.3. Notation.
• Let u = u(t, x). We put ∇u for ∇xu.• We denote by B(x, R) the euclidean sphere with center in x and radius
R > 0. In particular, we put B(R) = B(0, R).• Let A = A(y) and B = B(y) be two positive functions of some variable
y, such as y = (t, x) or y = x, on suitable domains. We write A � B ifthere exists a positive constant C such that A(y) ≤ CB(y) for all y in theintersection of the domains of A and B.
• For a sequence xn, we write xn ≤ o(1) to mean that there exists a sequenceyn such that xn ≤ yn definitively and yn → 0.
2. Preliminary results
In [DD], one can find a direct proof of the local existence and uniqueness for
utt − a(t)Δu = f(t, x, u)
with a(t) ≥ 0 a continuous piecewise C2 function with zeros of finite order. ByRemark 2.2 of [DD], we see that this equation obeys the finite speed of propagationproperty, though we cannot have the strong Huygens principle. In particular, thesolution is compactly supported in space variable.
We focus our attention on the global existence result in the sense of our maintheorem. For t far from t0, the existence result follows from the strictly hyperboliccase. Due to the compact support of u, we are not concerned with the behaviourof a(t) when t → +∞. It remains to analyze the case t < t0 close to t0. It sufficesto prove that the solution u(x, t) : R3 × [0, t0[→ R admits a finite limit for t→ t−0 .For this reason, we deal directly with the equation
(2.1) utt − (t0 − t)λΔxu = −u|u|pc−1 x ∈ R3, t ≤ t0, 0 ≤ λ ≤ 2
3.
The restriction on λ will appear in Proposition 4.During the proof, we shall find various energy inequalities that directly implies
the uniqueness of the obtained smooth solutions.
2.1. The Liouville transformation. Let a(t) = (t0− t)λ on [0, t0]; we asso-ciate the function φ which satisfies{
φ′(S) = a(φ(S))−1/2 S ∈ [0, T0),φ(0) = 0,
with
T0 =
∫ t0
0
a(s)1/2 ds =tΛ0Λ
and
Λ = (λ+ 2)/2.

LARGE DATA SOLUTIONS 255
In particular, φ ∈ C2([0, T0))∩C([0, T0]) is a strictly increasing and convex functionon [0, T0], and φ(T0) = t0. For any S ∈ [0, T0], we have
φ(S) = t0 − [Λ(T0 − S)]1Λ ,
φ′(S) = [Λ(T0 − S)]1−ΛΛ
φ′′(S) = (Λ− 1) [Λ(T0 − S)]1−2Λ
Λ
φ′′′(S) = (Λ− 1)(2Λ− 1) [Λ(T0 − S)]1−3Λ
Λ .
(2.2)
Let f(u) = |u|p−1u. We can check that if u solves (2.1) in [0, t0], then the function
(2.3) w(x, T ) = (φ′(T ))−1/2u(x, φ(T )),
defined in [0, T0), solves the equation
(wTT−Δw)(x, T ) =
(3
4
(φ′′(T ))2
(φ′(T ))2− 1
2
φ′′′(T )
φ′(T )
)w(x, T )
− (φ′(T ))3/2f((φ′(T ))1/2w(x, T )),
(2.4)
with associated initial data
(2.5)w(x, 0) = t
λ/40 u0,
wt(x, 0) = −λ
4t−9λ/4−10 u0 + t
−λ/40 u1.
Recalling (2.2), the equation (2.4) becomes
(∂TT −Δ)w(x, T ) = −Λ2 − 1
4[Λ(T0 − T )]−2 w(x, T )
− [Λ(T0 − T )]−α(λ) w(x, T )|w(x, T )|pc−1
where
α(λ) =2λ
(λ+ 2)
(3λ+ 4)
(3λ+ 2).
Applying Kirchhoff’s formula, we get
(2.6)
w(x, T ) = w0(x, T )
− 1
4π
Λ2 − 1
4Λ2
∫ T
0
∫|x−y|=T−R
(T −R)−1(T0 −R)−2w(y,R) dσy dR
− Λ−α(λ)
4π
∫ T
0
∫|x−y|=T−R
(T −R)−1(T0 −R)−α(λ)w|w|Pc−1(y,R) dσy dR;
here w0(x, T ) solves the homogeneous equation wtt−Δw = 0 with initial data (2.5)and dσy is the surface measure of the ball centered in x with variable y.
2.2. Dependence cones. Fix (x, t) ∈ R3×[0, t0]. We introduce the truncatedcurved dependence cone
K(x, t) ={(x, t) ∈ R3 × R : ∃R ∈ [0, φ−1(t)] s.t. φ(R) = t, |x− x| ≤ φ−1(t)−R
}.
Let t1, t2 ∈ [0, t]. We shall use the notation
Kt2t1 (x, t) := K(x, t) ∩ (R3 × [t1, t2]); Kt1(x, t) := K t
t1(x, t).

256 SANDRA LUCENTE
Similarly, for the mantle, we have
M(x, t) = {(x, t) ∈ R3 × R : ∃R ∈ [0, φ−1(t)] s.t. φ(R) = t, |x− x| = φ−1(t)−R};M t2
t1 (x, t) := M(x, t) ∩ (R3 × [t1, t2]); Mt1(x, t) := M tt1(x, t).
Given t ∈ [0, t], the space-like section of the cone is given by
Dx,t(t) = K(x, t) ∩ (R3 × {t}).Having in mind (2.2) and the explicit expression of φ(T ), we find
φ−1(σ) = T0 −(t0 − σ)Λ
Λ;
this implies
K(x, t0) =
{(x, t) ∈ R3 × [0, t0] : |x− x| ≤ (t0 − t)Λ
Λ
},
M(x, t0) =
{(x, t) ∈ R3 × [0, t0] : |x− x| = (t0 − t)Λ
Λ
},
Dx,t0(t) = B
(x,
(t0 − t)Λ
Λ
).
In particular, the volume of the sections is given by
(2.7)
∫Dx,t0
(t)
1 dx =4π(t0 − t)3Λ
3Λ3.
2.3. Energy estimates. Let u be a C2 solution of the Cauchy Problem (2.1).Let us define the energy density
(2.8) e[u](x, t) :=1
2|ut(x, t)|2 + (t0 − t)λ
|∇u(x, t)|22
+|u(x, t)|pc+1
pc + 1;
the corresponding energy is given by
E[u](t) :=
∫R3
e[u](x, t) dx.
We put E0 := E[u](0). For any t ∈ [0, t0), we have
(2.9) ∂te[u] = (t0 − t)λdiv(ut∇u)− λ(t0 − t)λ−1 |∇u|22
.
Due to finite the speed of propagation and since the initial data is compactly sup-ported, we have
E′[u](t) = −λ(t0 − t)λ−1
∫R3
|∇u(x, t)|22
dx.
We get that E(t) is a decreasing function in [0, t0), though we lose the energyconservation law. In particular,
(2.10) E[u](t) ≤ E0.
For the local energy in Dx,t(t), we set
E[u,Dx,t(t)] :=
∫Dx,t(t)
e[u](x, t) dx.
A crucial identity for the local energy is the following.

LARGE DATA SOLUTIONS 257
Lemma 1. Let t1 < t2 < t ≤ t0. The following relation holds:
E[u,Dx,t(t1)] =E[u,Dx,t(t2)]
+
∫M
t2t1
(x,t)
dx[u] dΣ +λ
2
∫K
t2t1
(x,t)
(t0 − t)λ−1|∇u|2 dx dt
where dΣ is the surface measure of M t2t1 (x, t) and dx[u] is the energy flux of u:√
1 + (t0 − t)−λdx[u](x, t) =1
2
∣∣∣∣ x− x
|x− x|ut − (t0 − t)λ2∇u
∣∣∣∣2 + |u|pc+1
pc + 1.
Proof. Integrating by parts, we have∫K
t2t1
(x,t)
∂te[u](x, t) dx dt =
∫M
t2t1
(x,t)
e[u]nt dΣ
+
∫Dx,t(t2)
e[u](x, t2) dx−∫Dx,t(t1)
e[u](x, t1) dx.
On the other hand, the relation (2.9) implies∫K
t2t1
(x,t)
∂te[u](x, t) dx dt =
∫K
t2t1
(x,t)
(t0 − t)λdiv(ut∇u)− λ(t0 − t)λ−1 |∇u|22
dx dt
=
∫M
t2t1
(x,t)
(t0 − t)λut∇u · nx dΣ−∫K
t2t1
(x,t)
λ(t0 − t)λ−1 |∇u|22
dx dt.
In order to conclude the proof, it suffices to find
e[u]nt − (t0 − t)λut∇u · nx = dx[u].
To this aim, we compute the outward normal to the cone
(2.11) −→n (x, t) =1√
1 + (t0 − t)−λ
((t0 − t)−λ/2 x− x
|x− x| , 1)
and the proof is complete. �
In particular, for any x ∈ R3, t ≤ t0, the function t → E[u,Dx,t(t)] decreasesin [0, t0); moreover,
(2.12) E[u,Dx,t(t)] ≤ E0.
In turn, this implies that
(2.13) ‖u(t)‖L2(Dx,t(t)) � E1
pc+1
0 (t− t)32Λ
pc−1pc+1 � (t− t) � t0.
Sometimes it will be useful to write the boundary terms in the (x, t) space asthe images of the boundary term of the (x, T ) space:∫
Mt2t1
(x,t)
F (y, t) dΣ
=
∫ φ−1(t2)
φ−1(t1)
∫|y−x|=φ−1(t)−R
F (y, φ(R))√1 + (φ′(R))2 dωy dR
=
∫φ−1(t)−φ−1(t2)≤|x−y|≤φ−1(t)−φ−1(t1)
F (y, φ(φ−1(t)− |x− y|)) dy.
(2.14)

258 SANDRA LUCENTE
For example, from Lemma 1, we get
(2.15)
∫ T2
T1
∫|x−y|=T−R
√1 + (φ′(R))2dx[u](y, φ(R))) dωy dR
≤ E[u,Dx,φ(T )(φ(T1))];
in particular,
(2.16)
∫ T2
T1
∫|x−y|=T−R
|u(y, φ(R))|pc+1 dωy dR ≤ (pc + 1)E[u,Dx,φ(T )(φ(T1))].
Finally, we can rewrite Lemma 1 as follows.
Corollary 2. Let 0 ≤ t1 < t2 < t ≤ t0. The following relation holds:
E[u,Dx,t(t1)] = E[u,Dx,t(t2)] +λ
2
∫K
t2t1
(x,t)
(t0 − t)λ−1|∇u|2 dx dt
+
∫Dx,t(t1)\Dx,t(t2)
[Λ(T0 − φ−1(t) + |y − x|)] 2λλ+2
|∇yΨx,t(y)|22
+|Ψx,t(y)|pc+1
pc + 1dy,
where
(2.17) Ψx,t(y) = u(y, φ(φ−1(t)−|y− x|)) = u(y, t0− [Λ(T0−φ−1(t)+ |y− x|)]1/Λ).
Indeed, an explicit computation on M t2t1 (x, t) gives∣∣∣∣ut − (t0 − t)
λ2
x− x
|x− x| · ∇u
∣∣∣∣2 =1
(φ′(φ−1(t)− |y − x|))2|∇yΨx,t(y)|2.
In the sequel, we shall use the following local higher order energy estimates.
Lemma 3. Fix x ∈ R3. For ι = 1, 2, we set
eι[u](x, t) :=1
2
∑|α|=ι
|Dαxut(x, t)|2 + (t0 − t)λ|Dα
x∇xu(x, t)|2 + |Dαxu(x, t)|2;
Eι[u,Dx,t(t)] :=
∫Dx,t(t)
eι[u](x, t) dx.
Let t1 < t ≤ t0. Assume that for any (x, t) ∈ Kt1(x, t) \ (x, t)(2.18) |u(x, t)| � (t− t)−α α < (pc − 1)−1.
Then Eι[u,Dx,t(t)] ≤ C(t) in [t1, t] with C(t) > 0 continuous function.
Proof. Let t1 < t2 < t. We have∫K
t2t1
(x,t)
∂teι[u](x, t) dx dt =
∫M
t2t1
(x,t)
eι[u]nt dΣ + Eι[u,Dx,t(t2)]− Eι[u,Dx,t(t1)].
On the other hand, we can compute
∂teι[u] =∑|α|=ι
(t0 − t)λdiv (DαxutD
αx∇u)
+∑|α|=ι
Dαxut(D
αxu−Dα
x (|u|pc−1u))−∑|α|=ι
λ(t0 − t)λ−1 |Dαx∇u|22
.

LARGE DATA SOLUTIONS 259
Integrating on the truncated cone Kt2t1 (x, t), we find
E1[u,Dx,t(t2)]− E1[u,Dx,t(t1)]
�∑|α|=ι
∫K
t2t1
(x,t)
|Dαxut|(|Dα
xu|+ |Dαx (|u|pc−1u)|) dx dt
−∫M
t2t1
(x,t)
e1[u]nt −∑|α|=ι
(t0 − t)λDαxutD
αx∇u · nx dΣ.
Recalling (2.11), we see that the last integral is positive; indeed,√1 + (t0 − t)−λ
(eι[u]nt −
∑|α|=ι
(t0 − t)λDαxutD
αx∇u · nx
)
=1
2
∑|α|=ι
|Dαxu|2 +
∣∣∣∣Dαxut − (t0 − t)λ/2Dα
x∇u · x− x
|x− x|
∣∣∣∣2For ι = 1, due to (2.18), we get
E1[u,Dx,t(t2)] ≤ E1[u,Dx,t(t1)]
+
∫ t2
t1
∫Dx,t0
(t)
3∑j=1
(1 + (t− t)−α(pc−1))|Dxjut||Dxj
u| dx dt
≤ E1[u,Dx,t(t1)] +
∫ t2
t1
(1 + (t− t)−α(pc−1))E1[u,Dx,t(t)] dt.
The integral version of Gronwall’s lemma completes the proof, provided thatα(pc − 1) < 1.
For ι = 2, we have
E2[u,Dx,t(t2)]− E2[Dx,t(t1)] �∑|α|=2
∫ t2
t1
‖Dαxut‖L2(Dx,t(t))‖D
αxu‖L2(Dx,t(t)) dt
+∑|α|=2
∫ t2
t1
∫Dx,t(t)
|Dαxut||u|pc−1|Dα
xu| dx dt
+∑|α|=2
∫ t2
t1
∫Dx,t(t)
|Dαxut||u|pc−2|∇u|2 dx dt.
We can estimate the last term by means of the Gagliardo-Nirenberg inequality:
‖Dxjf‖24 �
∑|α|=2
‖Dαxf‖2‖f‖∞,
so that∫Dx,t(t)
|Dαxut||u|pc−2|∇u|2 dx � ‖Dα
xut‖L2(Dx,t(t))‖∇u‖2L4(Dx,t(t))‖u‖pc−2
L∞(Dx,t(t))
� ‖Dαxut‖L2(Dx,t(t))
∑|α|=2
‖Dαxu‖L2(Dx,t(t))‖u‖
pc−1L∞(Dx,t(t))
.

260 SANDRA LUCENTE
Finally, we get
E2[u,Dx,t(t2)]− E2[Dx,t(t1)]
�∫ t2
t1
(1 + ‖u‖pc−1L∞(Dx,t(t))
)∑|α|=2
‖Dαxut‖Dx,t(t)
∑|α|=2
‖Dαxu‖Dx,t(t)dt.
Due to (2.18), we obtain
E2[u,Dx,t(t2)] ≤ E2[u,Dx,t(t1)]
+
∫ t2
t1
∫Dx,t(t)
∑|α|=2
E2[u,Dx,t(t)](1 + (t− t)−α(pc−1)) dx dt.
Since α(pc − 1) < 1, by means of Gronwall’s lemma we get the result. �
As a consequence of Lemma 3, assuming (2.18) in Kt1(x, t) \ (x, t), we have
‖∇u(t)‖L2(Dx,t(t)) � C;(2.19) ∑|α|=2
‖Dαxu(t)‖L2(Dx,t(t)) � C(2.20)
with C > 0 independent of t ∈ [t1, t0].
2.4. Small local energy and small amplitude solutions. In this section,we recognize a local variant of the main result of [FL].
Proposition 4. Let u(x, t) be a C2 solution of (2.1) with t < t0. There existsε0 > 0, such that if for suitable 0 ≤ s < t ≤ t0, it holds
E[u,Dx,t(s)] ≤ ε0.
Then, for any (x, t) ∈ Ks(x, t) \ (x, t), it holds
|u(x, t)| � C(λ)(t− t)−λ4 −γΛ
with
γ = −1
2+
√2Λ2 − 1 + γ′(ε0)
2Λ
and γ′(ε0)→ 0 as ε0 → 0.
Proof. We prove the equivalent statement in term of w(x, T ) which satisfies(2.3). Let T = φ−1(t). We assume that for suitable 0 ≤ S < T0, it holds
E[u,Dx,t(φ(S))] ≤ ε0,
then, for any (x, φ(T )) ∈ Kφ(S)(x, t) \ (x, t), we prove
|w(x, T )| � C(λ, T0)(T − T )−γ .
For any T ∈ [S, T ), we put
μ(T ) = sup(y,φ(R))∈K
φ(T )
φ(S)(x,t)
|ω(y,R)|.

LARGE DATA SOLUTIONS 261
Let (x, φ(T )) ∈ Kφ(S)(x, t). Recalling Kirchhoff’s formula (2.6), we have
|w(x, T )| ≤ |wLIN(S)(x, T )|
+1
4π
Λ2 − 1
4Λ2
∫ T
S
∫|x−y|=T−R
(T0 −R)−2(T −R)−1|w(y, σ)| dσy dR
+Λ−α(λ)
4πμ(T )
∫ T
S
∫|x−y|=T−R
(T −R)−1(T0 −R)−α(λ)|w|pc−1(y, φ(σ)) dσy dR,
where wLIN(S) is the solution of wTT −Δw = 0 with initial data w(x, S), wt(x, S).Let us denote by mS(x, T ) the last integral, see also (2.23).
We shall show that for any A > 0 there exists 0 < ε(A) ≤ 1, such thatE[u,Dx,φ(T )(φ(S))] ≤ ε(A) implies mS(x, T ) ≤ A.
As a conclusion, we find(1− A
4πΛα(λ)
)μ(T ) ≤ sup
Kφ(T )
φ(S)(x,t)
|wLIN(S)|+Λ2 − 1
4Λ2
∫ T
S
(T0−R)−2(T−R)μ(R) dR.
Given ε > 0, we can choose A such that the previous relation becomes
μ(T ) ≤ Cε supK
φ(T )
φ(S)(x,t)
|wLIN(S)|+ (1 + ε)Λ2 − 1
4Λ2
∫ T
S
(T0 −R)−2(T −R)μ(R) dR.
In order to estimate μ(T ), we compare this expression with the Euler-type integralequation
(2.21) μ(T ) = α+ ζ(ζ − 1)
∫ T
S
(T −R)(T0 −R)−2μ(R) dR.
If α > 0 and ζ > 1, one has
(2.22) μ(R) ≤ αζ
2ζ − 1(T0 −R)1−ζ
for suitable C > 0. This can be found for example in [D]. In our case
ζ =1
2+
1
2Λ
√2Λ2 − 1 + ε(Λ2 − 1).
This gives the result, since 1− ζ < 0 and (T0 −R) ≥ (T −R).It remains to estimate
mS(x, T ) :(∫ T
S
∫|y−x|=T−R
(T −R)−1(t0 − Φ(R))−λ|u(x,Φ(R))|pc−1 dσy dR.
Using the assumption pc ≥ 3, we will prove that
(2.23) mS(x, T ) � E[u,Dx,φ(T )(φ(S))] +(E[u,Dx,φ(T )(φ(S))]
)q(λ)with a positive q(λ).
Since Dx,φ(T )(φ(S)) ⊂ Dx,t(φ(S)), fixed A > 0, there exists 0 < ε0(A) < 1 suchthat E[u,Dx,t0(φ(S))] < ε0 implies mS(x, T ) ≤ A. Moreover, ε0(A) is invertibleand A → 0 for ε0 → 0. In turn, this implies that in the statement we can write
γ = − 12 +
√2Λ2−1+γ′(ε0)
2Λ with γ′(ε0)→ 0 for ε0 → 0.

262 SANDRA LUCENTE
Let us prove (2.23). Let 3 < pc ≤ 5. We can apply Holder’s inequality, withexponent q = (pc − 1)/(pc − 3), and find
mqS(x, T ) �
∫ T
S
∫|x−y|=T−R
|u(y, φ(R))|pc+1 dσy dR×
×(∫ T
S
∫|x−y|=T−R
(t0 − φ(R))−λqq−1 (T −R)−
qq−1 |u(y, φ(R))|2 dσy dR
)q−1
.
Recalling (2.16), we can write
mS(x, T ) �(E[u,Dx,φ(T )(φ(S))]
)pc−3pc−1 I 2
pc−1
where
I :=
∫ T
S
∫|x−y|=T−R
(T −R)−4
λ+2 |u(y, φ(R))|2 dσy dR.
The same relation holds for pc = 3. In order to estimate I, we use the the followingweighted Hardy inequality on the backward cone:∫ T
S
∫|x−y|=T−R
(T −R)α−2ϕ2(y,R) dσy dR
�∫ T
S
∫|x−y|=T−R
(T −R)α∣∣∣∣∇yϕ(y,R)− y − x
|y − x|∂Rϕ(y,R)
∣∣∣∣2 dσy dR
+
∫ (T+S)/2
S
∫|x−y|=T−R
(T −R)α−2ϕ2(y,R) dσy dR.
Here ϕ ∈ C1(R3 × R), T > S, α > −1 and CH(α) > 0 is a suitable constant. Thisinequality has been proved in [FL].
Since −4/(λ + 2) + 2 > −1, the previous Hardy type inequality applies toour integral with ϕ(y,R) = u(y, φ(R)). Since ∂Ru(y, φ(R)) = φ′(R)ut(y, φ(R)), weobtain
I �∫ T
S
∫|x−y|=T−R
(T −R)2λ/(λ+2)
∣∣∣∣(∇yu−y − x
|y − x|φ′(R)ut
)(y, φ(R))
∣∣∣∣2 dωy dR
+
∫ (T+S)/2
S
∫|x−y|=T−R
(T −R)−4/(λ+2)u2(y, φ(R)) dσy dR =: I1 + I2.
Since a(φ(R)) ≥ (T −R)2λ/(λ+2), from (2.15), we have
I1 �
�∫ T
S
∫|x−y|=T−R
(T −R)2λ/(λ+2)[a(φ(R))]−1√1 + [φ′(R)]2dx[u](y, φ(R)) dσy dR
�∫ T
S
∫|x−y|=T−R
√1 + [φ′(R)]2dx[u] dσy dR � E[u,Dx,φ(T )(φ(S))].

LARGE DATA SOLUTIONS 263
We get the first term of (2.23). We turn to the estimate of I2:
I2 ≤(∫ T+S
2
S
∫|x−y|=T−R
(T −R)−4λ+2
pc+1pc−1 dσy dR
) pc−1pc+1
×(∫ (T+S)/2
S
∫|x−y|=T−R
|u(y, φ(R)|pc+1 dσy dR
) 2pc+1
.
The first integral is dominated independently of T, S. With the aid of (2.16), wearrive at
I2 � E[u,Dx,φ(T )(φ(S))]2/(pc+1).
This concludes the proof of (2.23) with q(λ) = 43(λ+2) . �
The next result is crucial to get a necessary condition for the blow-up of thesolutions.
Proposition 5. Let u ∈ C2(R3 × [0, t0)) be the regular solution of (2.1). Fixx ∈ R3, t ∈ [0, t0]. Suppose 0 ≤ s < t such that
E[u,Dx,t(s)] ≤ ε0,
where ε0 is the same value in Proposition 4 such that γ′(ε0) < 13/9. Then
u ∈ L∞(Ks(x, t)).
As a consequence, if for t1 < t0 one has
lim(x,t)→(x,t0)
(x,t)∈Kt1(x,t0)\{(x,t0)}
|u(x, t)| = +∞,
then for any s ∈ [t1, t0), there holds E[u,Dx,t0(s)] ≥ ε0.
Proof. Proposition 4 implies that for any (x, t) ∈ Ks(x, t) \ (x, t), one has
|u(x, s)| � C(λ)(t− t)−λ/4−γ(λ+2)/2.
Due to our assumption γ′(ε0) < 13/9, we obtain λ/4 + γ(λ + 2)/2 < (pc − 1)−1.We are in a position to apply (2.13), (2.19), (2.20), so that
‖u(t)‖H2(Dx,t(t)) ≤ C
with C independent of t. By means of Sobolev’s embedding theorem, integratingin time, we can conclude the proof. �
2.5. Pohozaev-type identity. A straightforward computation gives the fol-lowing lemma which corresponds to the conformal invariance of our equation.
Lemma 6. The equation (2.1) is invariant under the transformation
u→ uR(x, t) = R3λ+2
2(λ+2)u(Rx, t0 −R2
λ+2 (t0 − t))
having generator
(2.24)duR
dR
∣∣∣∣R=1=
2
λ+ 2(t− t0)ut + x · ∇u+
3λ+ 2
2(λ+ 2)u.
Multiplying (2.1) by the terms of the generator, one obtains the Pohozaev-typeidentity:

264 SANDRA LUCENTE
Proposition 7. Let x ∈ R3 and t1 < t2 < t0. Let u be a solution of (2.1).Then∫
Kt2t1
(x,t0)
|u|pc+1
3Λ2(x, t) dx dt+
(t0 − t1)
ΛE[u,Dx,t0(t1)]−
(t0 − t2)
ΛE[u,Dx,t0(t2)]
=
∫Dx,t0
(t1)
ut(x, t1)
(3Λ− 1
2Λu(x, t1) + (x− x) · ∇u(x, t1)
)dx
−∫Dx,t0
(t2)
ut(x, t2)
(3Λ− 1
2Λu(x, t2) + (x− x) · ∇u(x, t2)
)dx
+1
Λ
∫M
t2t1
(x,t0)
(t0 − t)√1 + (t0 − t)−λ
∣∣∣∣ut − (t0 − t)λ/2y − x
|y − x| · ∇u
∣∣∣∣2 dΣ
− 3Λ− 1
2Λ
∫M
t2t1
(x,t0)
1√1 + (t0 − t)−λ
u
(ut − (t0 − t)λ/2
y − x
|y − x| · ∇u
)dΣ.
Proof. Let a(t) = (t0− t)λ and e[u] be defined by (2.8). Multiplying (2.1) byu, we get
0 = (uut)t − a(t)div(u∇u)− |ut|2 + a(t)|∇u|2 + |u|pc+1 := I1(u).
Multiplying (2.1) by (t0 − t)ut, we obtain
0 = ((t0 − t)e[u])t +λa(t)
2|∇u|2 − a(t)(t0 − t)div(ut∇u) + e[u] := I2(u).
Here the peculiar structure of our time-coefficient plays an important role, since wecompute −a′(t)(t− t0) = λ a(t). Multiplying (2.1) by (x− x) · ∇u, we have
0 = div
[(x− x)
(−|ut|2
2+ a(t)
|∇u|22
+|u|pc+1
pc + 1
)− a(t)(x− x) · ∇u∇u
]+ (ut(x− x) · ∇u)t +
3
2|ut|2 − a(t)
|∇u|22
− 3
pc + 1|u|pc+1 := I3(u).
Here we used the identity ∇u · ∇(x · ∇u) = |∇u|2 + x · ∇|∇u|2/2. Let γ(λ), β(λ),R0, P0, Q0 such that
0 = γ(λ)I1(u) + β(λ)I2(u) + I3(u) = R0 + ∂tQ0 − div(P0).
In particular,
R0 = (−2γ(λ) + β(λ) + 3)|ut|22
+ (2γ(λ) + β(λ)(λ+ 1)− 1) a(t)|∇u|22
+
(γ(λ) +
β(λ)− 3
pc + 1
)|u|pc+1.
We want R0 positive and depending only on the nonlinear term; hence we choose
γ(λ) =3λ+ 4
2(λ+ 2)=
3Λ− 2
2Λ, β(λ) = − 2
λ+ 2= − 1
Λ,

LARGE DATA SOLUTIONS 265
so that
R0 =4
3(λ+ 2)2|u|pc+1;
P0 = (t0 − t)λ+1∇u
(3λ+ 4
2(λ+ 2)
u
(t0 − t)− 2
λ+ 2ut +
(x− x) · ∇u
t0 − t
)+ (x− x)
(|ut|22
− (t0 − t)λ|∇u|22
− |u|pc+1
pc + 1
);
Q0 = − 2
λ+ 2(t0 − t)e[u] + ((x− x) · ∇u)ut +
3λ+ 4
2(λ+ 2)uut.
In order to conclude the proof, we integrate R0 + ∂tQ0 − div(P0) = 0 on thetruncated cone Kt2
t1 (x, t0) obtaining∫K
t2t1
(x,t0)
R0 dx dt
= −∫Dx,t0
(t2)
Q0 dx+
∫Dx,t0
(t1)
Q0 dx+
∫M
t2t1
(x,t0)
−Q0nt + P0 · nx dΣ.
It is crucial that the boundary integral (BI) does not contain the nonlinear term.Indeed, by using (2.11), we have
BI =
∫M
t2t1
(x,t0)
1√1 + (t0 − t)−λ
(−Q0 + P0 ·
y − x
|y − x| (t0 − t)−λ/2
)dΣ.
On the other hand, (y, t) ∈M t2t1 (x, t0) if and only if (t− t0)
Λ = Λ|y− x|. This gives
−Q0 + P0 ·y − x
|y − x| (t0 − t)−λ/2 = −Q0 + Λ(t0 − t)−λ−1P0 · (y − x)
=(t0 − t)
Λ
(1
2|ut|2 + (t0 − t)λ
|∇xu|22
+|u|pc+1
pc + 1
)− ((y − x) · ∇u)ut
− 3Λ− 1
2Λuut + Λ(y − x) · ∇u
(3Λ− 1
2Λ
u
(t0 − t)− ut
Λ+
(y − x) · ∇u
t0 − t
)+ Λ(t0 − t)−λ−1|y − x|2
(|ut|22
− (t0 − t)λ|∇u|22
− |u|pc+1
pc + 1
).
A straightforward computation gives
−Q0 + P0 ·y − x
|y − x| (t0 − t)−λ/2
=(t0 − t)
Λ
(1
2|ut|2 + (t0 − t)λ
|∇xu|22
+|u|pc+1
pc + 1
)− 2ut(y − x) · ∇u− 3Λ− 1
2Λuut +
3Λ− 1
2
u(y − x) · ∇u
(t0 − t)
+ Λ|(y − x) · ∇u|2
t0 − t+
1
Λ(t0 − t)
(|ut|22
− (t0 − t)λ|∇u|22
− |u|pc+1
pc + 1
)=
(t0 − t)
Λ|ut|2 − 2ut(y − x) · ∇u
− 3Λ− 1
2Λuut +
3Λ− 1
2
u(y − x) · ∇u
(t0 − t)+ Λ
|(y − x) · ∇u|2t0 − t
.

266 SANDRA LUCENTE
Using once more the relation (t− t0)Λ = Λ|y − x|, we arrive at
−Q0 + P0 ·y − x
|y − x| (t0 − t)−λ/2 =(t0 − t)
Λ
∣∣∣∣ut − (t0 − t)Λ−1 y − x
|y − x| · ∇u
∣∣∣∣2− 3Λ− 1
2Λu
(ut − (t0 − t)Λ−1 y − x
|y − x| · ∇u
).
In the last line, we recognize the quantity which appears in our statement. �
Corollary 8. Let x ∈ R3 and 0 ≤ t1 < t0. Let u be a solution of (2.1). Then
1
3Λ
∫Kt1
(x,t0)
|u|pc+1(x, t) dx dt+(t0 − t1)
ΛE[u,Dx,t0(t1)]
≤∫D(x,t0)(t1)
ut(x, t1)
(3Λ− 1
2Λu(x, t1) + (x− x) · ∇u(x, t1)
)dx
+
∫D(x,t0)(t1)
ΛΛ−1Λ |y − x|
2Λ−1Λ |∇Ψx,t0(y)|2 dx
+
∫D(x,t0)(t1)
3Λ− 1
2Λ− 1
Λ |y − x|Λ−1Λ |Ψx,t0(y)||∇Ψx,t0(y)| dy
since Ψx,t0 is defined in (2.17), that is, Ψx,t0(y) = u(y, t0 − [Λ|y − x|)]1/Λ).
Proof. First we take t2 → t0 in the identity of Proposition 7. Due to (2.12),we have (t0 − t2)E[u,Dx,t0(t2)] ≤ E0(t0 − t2)→ 0. Moreover,∫
Dx,t0(t2)
ut(x, t)(3Λ− 1
2Λu(x, t) + (x− x) · ∇u(x, t)
)dx
� ‖ut‖L2(Dx,t0(t2))‖u‖L2(Dx,t0
(t2)) + (t0 − t2)Λ
∫Dx,t0
(t2)
|∇u(x, t)| dx
� E[u,D(x,t0)(t2)]1/2(t0 − t2)
3Λ2
pc−1pc+1
(∫Dx,t0
(t2)
|u(x, t)|pc+1
) 1pc+1
+ (t0 − t2)52Λ−λ
2
((t0 − t2)
λ
∫Dx,t0
(t2)
|∇u(x, t)|2 dx) 1
2
� (t0 − t2)3Λ2
pc−1pc+1 E
12+
1pc+1
0 + (t0 − t2)52Λ−λ
2 E120 .
This quantity goes to zero for t2 → t0. It remains to manipulate the boundaryintegral (BI) in the Pohozaev identity. Using the transformation Ψx,t0 , we have
|∇yΨx,t0(y)| = (Λ|y − x|)−Λ−1Λ
∣∣∣∣ut − (t0 − t)λ2(x− x) · ∇u
|x− x|
∣∣∣∣ .This gives
BI ≤ 1
Λ
∫Dx,t0
(t1)
(Λ|y − x|) 1Λ (Λ|y − x|)2
Λ−1Λ |∇yΨx,t0(y)|2 dy
+3Λ− 1
2Λ
∫Dx,t0
(t1)
(Λ|y − x|)Λ−1Λ |Ψx,t0(y)||∇yΨx,t0(y)| dy.
The statement follows. �

LARGE DATA SOLUTIONS 267
3. Proof of the existence theorem
As discussed in Section 2, it suffices to prove that the C2 solution of (1.1) inR3 × [0, t0[ admits a finite limit for t → t−0 . We suppose by contradiction thatu : R3 × [0, t0[→ R blows up in t0. This means that there exists x0 ∈ R3 such that|u(x, t)| → +∞ for (x, t)→ (x0, t
−0 ). In particular, for any t1 ∈ [0, t0), we have
(3.1) lim(x,t)→(x0,t0)
(x,t)∈Kt1(x0,t0)
|u(x, t)| = +∞.
We divide the proof into several steps.
Step 1. Let (x0, t0) be the blow-up point in (3.1), then x0 = 0.
Proof. Due to the fact that u0, u1 is radial initial data, since the equation isinvariant with respect to the space rotations, the uniqueness result implies that thelocal solution is radial in the space variable. Arguing by contradiction, we supposethat x0 �= 0 in (3.1). Since u is radially symmetric, we have
lim(x,t)→(x,t0)
(x,t)∈Kt1(x,t0)
|u(x, t)| = +∞
for any x ∈ R3 such that |x| = |x0|. Proposition 5 implies E[u,Dx,t0(s)] ≥ ε0 forany s ∈ [t1, t0). Given K ∈ N we can choose tK ∈ [t1, t0) and K distinct elementsx1, . . . , xK ∈ R3 such that |xk| = |x0| for k = 1, . . . ,K and
Dxj ,t0(tK) ∩Dxk,t0(tK) = ∅ j �= k.
In this way, recalling (2.10), we have
Kε0 ≤K∑
k=1
E[u,Dxk,t0(tK)] =
∫⋃K
k=1 Dxk,t0(tK)
e[u](x, tK) dx ≤ E[u](tK) ≤ E0.
For K →∞ we find the contradiction. �
In the sequel, we shall omit the vertex (0, t0) in the notations of the cones, ofthe sections and of the local energy. In particular, for any t1 ∈ [0, t0), it holds
(3.2) lim(x,t)→(0,t0)
(x,t)∈Kt1
|u(x, t)| = +∞.
Step 2. Blow-up functions.Let m ∈ N. The m-blown-up function is given by
um(x, t) = R3λ+2
2(λ+2)m u
(Rmx, t0 −R
2λ+2m (t0 − t)
)= R
3λ+22(λ+2)m u(Rmx, tm),
Rm = 2−m,
tm = t0 − R2
λ+2m (t0 − t).
In particular, u0 = u. Lemma 6 assures that um is still a solution for our equation.Since u ∈ C2(R3 × [0, t0)), we have
um ∈ C2(R3 × [rm, t0)) rm = t0(1−R− 1
Λm ).

268 SANDRA LUCENTE
As discussed in Section 1.1, the criticality of our exponent corresponds to the re-lation E[um, D(rm)] = E[u,D(0)]. Recalling that the local energy decreases, wefind
(3.3) E[um, D(t)] ≤ E[um, D(rm)] = E[u,D(0)] ≤ E0 ∀ t ∈ [rm, t0).
In particular, E[um, D(s)] has a finite positive limit for s → t0. From (3.2), wededuce
lim(x,t)→(0,t0)
(x,t)∈Krm
|um(x, t)| = +∞.
By means of Proposition 5, we conclude that
E[um, D(s)] ≥ ε0 ∀ s ∈ [rm, t0).
Step 3. From Pohozaev’s inequality to infinitesimal integrals of the blow-upfunctions.
Using (2.2), we see that the trace of um on the mantle of Krm is given by
Ψm(y) = um(y, φ(T0 − |y|)) = R3λ+2
2(λ+2)m u
(Rmy, t0 −R
2λ+2m (t0 − φ(T0 − |y|))
)= R
3λ+22(λ+2)m u(Rmy, φ(T0 − |Rmy|)) = R
3λ+22(λ+2)m Ψ0(Rmy).
Fix t ≤ s ≤ t0. We put tm = t0−R1Λm(t0− t) and sm = t0−R
1Λm(t0− t); Corollary 2
implies
E[u,D(tm)]− E[u,D(sm)]
≥∫
(t0−sm)Λ
Λ ≤|y|≤ (t0−tm)Λ
Λ
1
2(Λ|y|)
λΛ |∇Ψ0(y)|2 +
|Ψ0(y)|pc+1
pc + 1dy.
Changing the variable in the right side of the previous inequality, and using thecontinuity of E[u;D(·)], we conclude that∫
(t0−s)Λ
Λ ≤|y|≤ (t0−t)Λ
Λ
|y| λΛ |∇Ψm(y)|2 dy → 0,∫(t0−s)Λ
Λ ≤|y|≤ (t0−t)Λ
Λ
|Ψm(y)|pc+1 dy → 0
(3.4)
as m→ +∞. Applying Holder’s inequality and (2.14), we get∫Ms
t
|um|2 dΣ ≤∫
(t0−s)Λ
Λ ≤|y|≤ (t0−t)Λ
Λ
|Ψm|2 dy
� (t0 − t)3Λpc−1pc+1
(∫(t0−s)Λ
Λ ≤|y|≤ (t0−t)Λ
Λ
|Ψm|pc+1 dy
) 2pc+1
→ 0
(3.5)
as m→ +∞.
Lemma 9. There exists t1 ∈ [0, t0) and an unbounded sequence of increasinginteger indexes B such that for any m ∈ B, and m→ +∞, one has
1
|t0 − t1|
∫D(t1)
(um)tum dx =1
|t0 − tm|
∫D(tm)
(utu)(x, tm) dx ≤ o(1)
with tm = t0 −R1/Λm (t0 − t1). In particular, tm ↗ t0.

LARGE DATA SOLUTIONS 269
Proof. We prove the first identity in the case sm = t0 −R1/Λm (t0 − s):
1
|t0 − sm|
∫D(sm)
utu(x, sm) dx =1
R1Λm|t0 − s|
∫D(s)
R3mutu(Rmx, sm) dx
=1
R1Λm|t0 − s|
∫D(s)
R3mR
− 3λ+2λ+2 − 1
Λm (um)tum dx =
1
|t0 − s|
∫D(s)
(um)tum dx.
Let us suppose that there exists t1 ∈ [0, t0) such that
(3.6)
∫D(t1)
|um|2(x, t1) dx→ 0 as m→ +∞.
The claim follows. Indeed,
1
|t0 − tm|
∫D(tm)
utu(x, tm) dx ≤ 1
|t0 − tm|
(∫D(tm)
|ut|2 dx) 1
2(∫
D(tm)
|u|2 dx) 1
2
≤ 1
R1Λm|t0 − t1|
E120
(R
2Λm
∫D(t1)
|um|2 dx) 1
2
≤ 1
|t0 − t1|E
120
(∫D(t1)
|um|2 dx) 1
2
.
It remain to discuss the possibility that (3.6) fails for the blow-up sequence um aswell as for any subsequence of um. Fix t1 ∈ [0, t0). There exists C1 > 0 and asubsequence um(k) such that∫
D(t1)
|um(k)|2(x, t1) dx ≥ C1.
On the other hand, combining Holder’s inequality with (2.7) and (3.3), we have∫D(s)
|um(k)|2(x, s) dx ≤(
4π
3Λ3(t0 − s)3Λ
) pc−1pc+1
((pc + 1)E0)2
pc+1 .
Since the right side is independent of m(k), we can choose s1 ∈ [t1, t0) such that,for any s ∈ [t1, s1] and any m(k), we have
(3.7)
∫D(s)
|um(k)|2(x, s) dx < C1 ≤∫D(t1)
|um(k)|2(x, t1) dx.
Since
2
∫Ks
t1
(um(k))tum(k) dx dt =
∫D(s)
|um(k)|2(x, s) dx−∫D(t1)
|um(k)|2(x, t1) dx
+
∫Ms
t1
|um(k)|2nt dΣ ,
by using (3.5) and (3.7), for any s ∈ [t1, s1], we find
(3.8)
∫Ks
t1
(um(k))tum(k) dx dt ≤ o(1) as k →∞.
In order to obtain the statement, it suffices to prove that there exist s ∈ [t1, s1] anda subsequence of m(h) of m(k) such that
∫D(s)
(um(h))tum(h) dx ≤ o(1). Suppose

270 SANDRA LUCENTE
by contradiction that there exists C2 > 0 such that∫D(s)
(um(k))tum(k) dx ≥ C2 > 0
uniformly in s and m(k). We should get∫K
s1t1
(um(k))tum(k) dx dt ≥∫ s1
t1
∫D(s)
(um(k))tum(k) dx dx ≥ C2|s1 − t1|
as opposed to (3.8). This concludes the proof. �
Now we apply Pohozaev’s inequality in Kt1 to the solutions um with m ∈ B.A combination of Corollary 8, Lemma 9 and (3.4) with Holder’s inequality gives
1
3Λ
∫Kt1
|um|pc+1(x, t) dx dt+(t0 − t1)
ΛE[um, D(t1)]
≤ o(1) +
∫D(t1)
(um)t x · ∇um(x, t1) dx .
We can rewrite this expression as
(t0 − t)Λ−1
3Λ
∫Kt1
|um|pc+1(x, t) dx dt+
∫D(t1)
(t0 − t1)Λ
Λ
|um|pc+1
pc + 1dx
+
∫D(t1)
1
2
((t0 − t1)
Λ
Λ− |x|
)[|(um)t|2 + (t0 − t1)
λ|∇um|2]
+
∫D(t1)
|x|∣∣∣∣ x
|x| (um)t − (t0 − t1)λ/2∇um
∣∣∣∣2 dx ≤ o(1).
(3.9)
Step 4. Estimate from below.
The next lemma will be proved in the Appendix.
Lemma 10. Assume (3.2). There exists β > 0 such that
lim supt→t0
(t0 − t)β supKt
t1
|u(x, s)| := ρ > 0.
For any m ∈ B, there exists tm ≥ t1 and a point (xm, sm) ∈ Ktm such that
(3.10) supKtm (xm,sm)
|u(x, t)| = |u(xm, sm)| > ρ
4|t0 − sm|−β.
We observe that there exists an increasing sequence k(m) ∈ B such that
· · · ≤ tk(m)−1 ≤ tk(m) ≤ sm ≤ tk(m)+1 ≤ . . . .
In particular, sm → t0. Our next aim is to find k(m) ∈ B such that on a level tk(m),one has
E[u,Dxm,sm(tk(m))] ≥ ε0.
By contradiction, we assume that for any s ∈ [t1, sm), one has E[u,Dxm,sm(s)] ≤ ε0.Proposition 5 will give a constant C > 0, which does not depend on m, such that
|u(x, t)| � C
for any (x, t) ∈ Ktk(m)(xm, sm). Recalling (3.10), for m → +∞, we obtain the
contradiction
C ≥ supKtk(m)(xm,s)
|u(x, t)| ≥ |u(xm, sm)| ≥ ρ
4(t0 − sm)−β.

LARGE DATA SOLUTIONS 271
Step 5. Conclusion.We fix J ∈ N and m ∈ B. Consider (xm, sm, tk(m)) such that (3.10) holds. We
choose J points xjm equi-distributed on the sphere: for any 1 ≤ j ≤ J , one has
|xjm| = |xm| and |xj
m − xkm| ≥ η|xm| for suitable η > 0 if 1 ≤ j �= k ≤ J . We are
able to prove that
E
[u;
⋃j �=k
Dxjm,sm
(tk(m)) ∩Dxjm,sm
(tk(m))
]→ 0 as m→∞.
Indeed, examining Figure 2 of [S2], and carrying it on the curved cone Kt1 bymeans of φ, we see that there exists 0 < δ < 1 such that
Dxjm,sm
(s) ∩Dxkm,sm(s) ⊂ B
((1− δ)(t0 − s)Λ
Λ
)for any s ∈ [tm, sm) and for any j �= k. We deduce
E
[u;
⋃j �=k
Dxj ,sm(tk(m)) ∩Dxj ,sm(tk(m))
]�
∫|x|≤(1−δ)
(t0−tk(m))Λ
Λ
1
2|ut(x, tk(m))|2 dx
+
∫|x|≤(1−δ)
(t0−tk(m))Λ
Λ
(t0 − tk(m))λ |∇u(x, tk(m))|2
2+|u(x, tk(m))|pc+1
pc + 1dx .
On the other hand, tk(m) = t0 −R1/Λk(m)(t0 − t1); hence we have
E
[u;
⋃j �=k
Dxjm,sm
(tk(m)) ∩Dxjm,sm
(tk(m))
]�
∫|y|≤(1−δ)
(t0−t1)Λ
Λ
1
2|(uk(m))t(y, t1)|2 dx
+
∫|y|≤(1−δ)
(t0−t1)Λ
Λ
(t0 − t1)λ |∇uk(m)(y, t1)|2
2+|uk(m)(y, t1)|pc+1
pc + 1dx
� Λ
δ(t0 − t1)Λ
∫D(t1)
((t0 − t1)
Λ
Λ− |x|
)[|(uk(m))t|2 + (t0 − t1)
λ|∇uk(m)|2]dx
+Λ
δ(t0 − t1)Λ
∫D(t1)
|x|∣∣∣∣ x
|x| (uk(m))t − (t0 − t1)λ2∇uk(m)
∣∣∣∣2 dx
+
∫D(t1)
|uk(m)(y, t1)|pc+1
pc + 1(x, t1) dx ≤ o(1).
In the last line we used (3.9).Finally, we can combine (3.10) with the last computation and obtain
Jε0 �J∑
j=1
E[u,Dxm,sm(tk(m))]
≤ E[u,D(tk(m))] +∑j �=k
E
[u;
⋃j �=k
Dxjm,sm
(tk(m)) ∩Dxjm,sm
(tk(m))
]≤ E0 + o(1).

272 SANDRA LUCENTE
For m → ∞ and J large, we get the contradiction. The solution u cannot satisfy(3.2), so it exists globally.
Appendix
We conclude with the proof of Lemma 10. We assume by contradiction that
gβ(t) = (t0 − t)β supKt
t1
|u(x, s)| → 0 for t→ t0 and for any β > 0.
Setting gβ(t0) = 0, we get a continuous function on [t1, t0].Following [S], we construct on [t1, t0] the continuous decreasing function
hβ(t) = supt≤s
gβ(s) ,
so that hβ(t) → 0 for t → t0. We can define hβ(t) = hβ(t1) for t ≤ t1. For anyt ∈]t1, t0[, there exists s(t) ≥ t such that hβ(t) = gβ(s(t)) and there exist x(t) ∈ R3,τ (t) ≤ s(t), such that gβ(s(t)) = (t0 − s(t))β|u(x(t), τ (t))|. We set
M(t) =t0 − τ (t)
t0 − t.
Step A.1. Decay of h(t).
1) Let J = {t ∈ [t1, t0[ |M(t) > 1}. For t ∈ J , one has τ (t) ≤ t ≤ s(t), so thatx(t) and τ (t) are constant in [τ (t), s(t)]. This gives
hβ(t) = gβ(s(t)) ≤ (t0 − t)β|u(x(t), τ (t))| ≤ gβ(t) ≤ hβ(t).
In particular, for t ∈ J , it holds that hβ(τ (t)) = (t0 − τ (t))β|u(x(t), τ (t))|. In turn,this implies that J consists of a union of left open intervals I such that
hβ(t) =
(t0 − t
t0 − s
)β
hβ(s) ,
hβ(t) + |t0 − t|μ ≤(
t0 − t
t0 − s
)ε
(hβ(s) + |t0 − s|μ) ,(A.11)
for any s ≤ t ∈ I and any ε ∈]0, μ[ with μ ∈]0, β].2) We discuss the case M(t) ≤ 1, that is, s(t) ≥ τ (t) ≥ t, renaming x(t) = x
and τ (t) = t; hence
hβ(t) = gβ(s(t)) = (t0 − s(t))β|u(x, t)| ≤ (t0 − t)β |u(x, t)|.We choose β to gain a decay which leads to a contradiction.
We split the solution into uLIN and uNL, respectively, solutions of utt −a(t)Δu = 0 with u(x, t1), ut(x, t1) data and utt − a(t)Δu = −|u|pc−1u with zerodata. We apply Liouville’s transformation only to uNL, so that Kirchhoff’s formula(2.6) can be rewritten as
u(x, t) = uLIN (x, t) + (t0 − t)−λ4
∑i=1,2
Ii(x, t).
Since |u(x, φ(R)| ≤ (t0−φ(R))−βgβ(φ(R)), after trivial integration with respect toy, we have
Ii(x, t) ≤ Ci
∫ φ−1(t)
φ−1(t1)
(φ−1(t)−R)(T0 −R)ai(t0 − φ(R))λ4 bi−βbi(gβ(Φ(R)))bi dR

LARGE DATA SOLUTIONS 273
with
a1 = −2 , b1 = 1 , C1 =Λ2 − 1
4Λ2,
a2 = −α(λ) , b2 = pc , so that a2 +λ
4Λpc = − 3λ
4Λ.
In order to deal with hβ(t), by change of variable ρ = t0−Φ(R)M , we estimate
(t0 − t)β−λ/4I2 � (t0 − t)β−λ4 Mβ−λ
4
∫ t0−t1M
t0−t
(Mρ)Λ− 3λ4 −βpc+
λ2 gpc
β (t0 −Mρ)M dρ.
If we take
β =3λ+ 2
4,
then the exponent of M vanishes. We split the integral at the point t0 − t1; sinceh is constant for t ≤ t1, we get
(t0 − t)β−λ/4I2(x, t) � (t0 − t)Λ + (t0 − t)Λ∫ t0−t1
t0−t
ρ−λ+32 hpc
β (t0 − ρ) dρ.
Since t→ t0, we conclude
hβ(t) ≤ C0(t0 − t)λ+12 +
Λ2 − 1
4Λ2
∫ φ−1(t)
φ−1(t1)
(φ−1(t)−R)(T0 −R)−2hβ(Φ(R)) dR
+ C2(t0 − t)λ+12
∫ t0−t1
t0−t
ρ−λ+32 hpc
β (t0 − ρ) dρ.
Let 0 < μ < 1. Since hβ(t0 − ρ) is increasing and bounded, we have
(t0 − t)λ+12
∫ t0−t1
t0−t
ρ−λ+32 hpc
β (t0 − ρ) dρ
� (t0 − t)λ+12
∫ (t0−t)μ
t0−t
ρ−λ+32 hpc
β (t0 − ρ) dρ
+ (t0 − t)λ+12
∫ t0−t1
(t0−t)μρ−
λ+32 hpc
β (t0 − ρ) dρ
� hpc
β (t0 − (t0 − t)μ) + (t0 − t)λ+12 (1−μ) sup
t1<t<t0
hpc
β .
Finally,
hβ(φ(φ−1(t)) ≤ C(t0 − t)
λ+12 (1−μ) + Chβ(t0 − (t0 − t)μ)
+Λ2 − 1
4Λ2
∫ φ−1(t)
φ−1(t1)
(φ−1(t)−R)(T0 −R)−2hβ(Φ(R)) dR.
We can apply Euler’s equation (2.21) with a = C(t0−t)λ+12 (1−μ)+Chβ(t0−(t0−t)μ)
and exponent ζ = 12 + 1
2Λ
√2Λ2 − 1. We obtain
hβ(t) �((t0 − t)
λ+12 (1−μ) + hpc
β (t0 − (t0 − t)μ))(t0 − t)(1−ζ)Λ.
Let t1 = t0 − (t0 − t)μ. Since t0 − t1 = (t0 − t)μ, for any a ∈ R, we have
(t0 − t)ahβ(t) � (t0 − t)λ+12 (1−μ)+(1−ζ)Λ+a +
(hβ(t1)(t0 − t1)
(1−ζ)Λ+aμpc
)pc
.

274 SANDRA LUCENTE
We denote by hβ,μ(t) = (t0 − t)(1−ζ)Λμpc−1 hβ(t) with μ �= 1
pc. It follows that
hβ,μ(t) � (t0 − t)λ+12 (1−μ)+(1−ζ)Λ μpc
μpc−1 + (hβ,μ(t1))pc .
Assuming
(A.12) 0 ≤ μ <λ+ 1
2(1− μ) + (1− ζ)Λ
μpcμpc − 1
,
we get
(t0 − t)μ + hβ,μ(t) � (t0 − t)μ + (hβ,μ(t1))pc .
For μ < 1/pc, we have (t0 − t1)μpc ≥ (t0 − t1) = (t0 − t)μ. We conclude
(t0 − t)μ + hβ,μ(t) �((t0 − t1)
μ + (hβ,μ(t1))pc .
We see that the conditions μ < 1/pc and (A.12) are compatible; in particular, wecan take μ > 0 and η = 1
pc− μ > 0 small enough so that
1
pc<
λ+ 1
2
(1− 1
pc+ η
)− (1− ζ)Λ
1− ηpcηpc
.
We can iterate such procedure by taking t0− tK = (t0− tK−1)μ. Using the conver-
gence of∑∞
K=1 pKc , for some ε > 0 one has
(t0 − t)μ + hβ,μ(t) �∣∣∣∣ t0 − t
t0 − tK
∣∣∣∣ε ((t0 − tK)μ + (hβ,μ(tK))pc .
For details, see Struwe [S, p. 508-509]. Combining this argument with (A.11), wefind a small ε > 0 and μ > 0 with small η = μ− 1/pc > 0 such that
hβ,μ(t) � (t0 − t)ε .
Since gβ+ (1−ζ)Λ
μpc−1
≤ hβ,μ, we conclude
(A.13) (t0 − t)3λ+2
4 +Λ−√
2Λ2−12(μpc−1)
−ε supKt
t0
|u| ≤ C for t→ t0.
Step A.2. Uniformly boundedness of u and contradiction. Let
γ = inf{γ > 0 | (t0 − t)γ sup
Ktt0
|u| < +∞ uniformly in t}.
Manipulating Kirchhoff’s formula as before, we get
(t0 − t)λ/4|u(x, t)| ≤ C0(t0 − t)λ/4
+Λ2 − 1
4Λ2
∫ φ−1(t)
φ−1(t1)
(φ−1(t)−R)(T0 −R)−2(t0 − Φ(R))λ/4 supK
φ(R)t1
|u| dR
+ C2
∫ t
t1
(φ−1(t)− φ−1(τ ))(T0 − φ−1(τ ))−3λ4Λ−γpc(t0 − τ )
λ2 gpc
γ (τ ) dτ.
Let γ > γ. Then gγ(t) is a continuous function, uniformly bounded and gγ(t)→ 0for t→ t0. We set
m(T ) = (t0 − Φ(T ))λ/4 supK
φ(T )t1
|u(x, t)|,

LARGE DATA SOLUTIONS 275
and we obtain the following Euler equation of type (2.21) with ζ = 12+
12Λ
√2Λ2 − 1:
m(φ−1(t)) ≤ C0(t0 − t)λ/4 + C2
∫ t
t1
(t0 − τ )1+λ4 −γpc dτ(A.14)
+Λ2 − 1
4Λ2
∫ φ−1(t)
φ−1(t1)
(φ−1(t)−R)(T0 −R)−2m(R) dR.
We have to distinguish two cases.
Case 1. If 2 + λ4 − γpc < 0, then the integral in (A.14) is uniformly bounded
and (2.22) gives
m(φ−1(t)) � (T0 − φ−1(t))12−
12Λ
√2Λ2−1,
equivalently,
|u(x, t)| � (t0 − t)12−
12
√2Λ2−1.
Since − 12 +
12
√2Λ2 − 1 < (pc− 1)−1, we can apply Lemma 3 and Sobolev’s embed-
ding. Similar to Proposition 5, we get the boundedness of u in Kt1 against (3.2)and we conclude the proof.
Case 2. If 2 + λ4 − γpc ≥ 0, then the integral in (A.14) is dominated by
(t0 − t)2+λ4 −γpc , which plays the role of α in the Euler equation and we conclude
that
|u(x, t)| � (t0 − t)52+
λ4 −γpc− 1
2
√2Λ2−1.
This means that for any γ > γ, one has γ < −52+
λ4 +γpc+
12
√2Λ2 − 1. The desired
contradiction follows by selecting a suitable γ ∈ [γ, 1pc
(γ + 5
2 −λ4 −
12
√2Λ2 − 1
)].
This interval is not empty if γ < 1pc−1
(52 + λ
4 −12
√2Λ2 − 1
).
From (A.13), for small η = μ− 1pc
one has γ < 3λ+42 + Λ−
√2Λ2−1
2(μpc−1) . Then, taking
a smaller η, this quantity is less than 1pc−1
(52 + λ
4 −12
√2Λ2 − 1
). This completes
the proof. �
References
[DbL] Marcello D’Abbicco and Sandra Lucente, A modified test function method for dampedwave equations, Adv. Nonlinear Stud. 13 (2013), no. 4, 867–892. MR3115143
[DmL] Lorenzo D’Ambrosio and Sandra Lucente, Nonlinear Liouville theorems for Grushinand Tricomi operators, J. Differential Equations 193 (2003), no. 2, 511–541, DOI
10.1016/S0022-0396(03)00138-4. MR1998967 (2004g:35241)[D] Piero D’Ancona, A note on a theorem of Jorgens, Math. Z. 218 (1995), no. 2, 239–252,
DOI 10.1007/BF02571902. MR1318158 (96e:35108)[DD] Piero D’Ancona and Alessandra Di Giuseppe, Global existence with large data for a non-
linear weakly hyperbolic equation, Math. Nachr. 231 (2001), 5–23, DOI 10.1002/1522-2616(200111)231:1〈5::AID-MANA5〉3.0.CO;2-M. MR1866192 (2002h:35193)
[FL] Luca Fanelli and Sandra Lucente, The critical case for a semilinear weakly hyperbolic equa-tion, Electron. J. Differential Equations (2004), No. 101, 13 pp. (electronic). MR2108872(2005g:35214)
[G] Anahit Galstian, Global existence for the one-dimensional second order semilin-ear hyperbolic equations, J. Math. Anal. Appl. 344 (2008), no. 1, 76–98, DOI10.1016/j.jmaa.2008.02.022. MR2416294 (2009c:35305)
[G2] Manoussos G. Grillakis, Regularity for the wave equation with a critical nonlinearity,Comm. Pure Appl. Math. 45 (1992), no. 6, 749–774, DOI 10.1002/cpa.3160450604.MR1162370 (93e:35073)

276 SANDRA LUCENTE
[KM] Carlos E. Kenig and Frank Merle, Nondispersive radial solutions to energy supercriticalnon-linear wave equations, with applications, Amer. J. Math. 133 (2011), no. 4, 1029–1065,DOI 10.1353/ajm.2011.0029. MR2823870 (2012i:35244)
[L] Sandra Lucente, On a class of semilinear weakly hyperbolic equations, Ann. Univ. FerraraSez. VII Sci. Mat. 52 (2006), no. 2, 317–335, DOI 10.1007/s11565-006-0024-3. MR2273102(2007k:35336)
[Ra] Jeffrey Rauch, I. The u5 Klein-Gordon equation. II. Anomalous singularities for semilin-
ear wave equations, Nonlinear partial differential equations and their applications. Collegede France Seminar, Vol. I (Paris, 1978/1979), Res. Notes in Math., vol. 53, Pitman, Boston,Mass.-London, 1981, pp. 335–364. MR631403 (83a:35066)
[Re] Michael Reissig, On Lp-Lq estimates for solutions of a special weakly hyperbolic equation,Proceedings of the Conference on Nonlinear Evolution Equations and Infinite-dimensionalDynamical Systems (Shanghai, 1995), World Sci. Publ., River Edge, NJ, 1997, pp. 153–164.MR1659666
[SS] Jalal Shatah and Michael Struwe, Geometric wave equations, Courant Lecture Notesin Mathematics, vol. 2, New York University, Courant Institute of Mathematical Sci-ences, New York; American Mathematical Society, Providence, RI, 1998. MR1674843(2000i:35135)
[S] Michael Struwe, Globally regular solutions to the u5 Klein-Gordon equation, Ann. ScuolaNorm. Sup. Pisa Cl. Sci. (4) 15 (1988), no. 3, 495–513 (1989). MR1015805 (90j:35142)
[S2] Michael Struwe, Semi-linear wave equations, Bull. Amer. Math. Soc. (N.S.) 26 (1992),no. 1, 53–85, DOI 10.1090/S0273-0979-1992-00225-2. MR1093058 (92e:35112)
[Y1] Karen Yagdjian, A note on the fundamental solution for the Tricomi-type equationin the hyperbolic domain, J. Differential Equations 206 (2004), no. 1, 227–252, DOI10.1016/j.jde.2004.07.028. MR2093924 (2005k:35302)
[Y2] Karen Yagdjian, Global existence for the n-dimensional semilinear Tricomi-type equa-tions, Comm. Partial Differential Equations 31 (2006), no. 4-6, 907–944, DOI10.1080/03605300500361511. MR2233046 (2007e:35207)
Dipartimento di Matematica, Universita degli Studi di Bari, Via E. Orabona 4,
I-70125 Bari, Italy
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13191
The Fredholm Property and Essential Spectraof Pseudodifferential Operators on Non-compact
Manifolds and Limit Operators
V. Rabinovich
Abstract. The paper is devoted to the Fredholm theory and the essentialspectrum of pseudodifferential operators (psdo’s) on C∞ non-compact mani-folds Q with a conical structure at infinity. We consider psdo’s which in thelocal coordinates have symbols in the Hormander class Sm
1,0(Rn). For the study
of the Fredholm property and the essential spectra of psdo’s, we apply the localtheory and the limit operators method.
The main result of the paper is: a pseudodifferential operator A actingfromHs(Q,E) into Hs−m(Q,E) whereHs(Q,E) is a Sobolev space of sectionsof a Hermitian vector bundle p : E → Q is a Fredholm operator if and only if:(i) A is elliptic at every point x ∈ Q; (ii) all limit operators of A are invertible.
We apply these results to a description of the essential spectra of a real-ization of uniformly elliptic psdo of positive order as unbounded operators inL2(Q,E).
1. Introduction
The paper is devoted to Fredholm theory and the essential spectrum of pseudo-differential operators (abbreviated psdo’s) on smooth non-compact manifolds witha conical structure at infinity. We consider psdo’s which in local coordinates havesymbols in the Hormander class Sm
1,0(Rn) (see for instance [18], [21]). More narrow
classes of psdo’s on similar manifolds were studied earlier (see [6], [7], [16], [2],[1]). For the study of the Fredholm property and the essential spectra of psdo’s,we apply here the local theory and the limit operators method. This method forinvestigation of the Fredholm property of partial differential operators was appliedfirst in [5], and later for investigation of the Fredholm property and the essentialspectra of psdo’s on Rn in [4], [8], [13], [14], [9], [10], see also the book [15, Chap-ter 4]. Note that the limit operators proved to be an effective and convenient toolfor the investigation of essential spectra of partial differential operators [9]. In thatpaper, in particular, the essential spectra of electromagnetic Schrodinger and Diracoperators on Rn for wide classes of potentials were investigated.
Our paper is organized as follows. In Section 2, we consider psdo’s on Rn withsymbols in the Hormander class Sm
1,0. We introduce the compactification Rn of Rn
obtained by adjoining to every ray outgoing from the origin an infinitely distant
2010 Mathematics Subject Classification. Primary 47G30, 58J05.Partially supported by the CONACYT project 000000000179872.
c©2015 V. Rabinovich
277

278 V. RABINOVICH
point. The topology in Rn is introduced such that Rn is homeomorphic to the closedunit ball in Rn. We define the limit operators for psdo’s and formulate in termsof the limit operators the necessary and sufficient conditions of local invertibiliy ofpsdo’s at infinitely distant points of the compactification Rn.
In Section 3, we introduce a class of non-compact C∞ manifolds Q of thedimension n with a conical structure at infinity. This means that there exists a finitecovering Q ⊂
⋃j∈J Uj by open sets Uj and homeomorphisms ϕj : Uj → ϕj(Uj)
onto open sets Rn, and partition J into two not intersecting sets J = J ′ ∪ J”. Thesets ϕj(Uj), j ∈ J ′, are open bounded sets in Rn, and the sets ϕj(Uj), j ∈ J”, are
open conical sets in Rn with the transition functions ϕj2 ◦ ϕ−1j1
: ϕj1(Uj1 ∩ Uj2)→ϕj2(Uj1 ∩ Uj2), j1, j2 ∈ J”, of the form
(ϕj2 ◦ ϕ−1
j1
)(x) = |x|Φj1j2
(x
|x|
), x ∈ ϕj1(Uj1 ∩ Uj2),
where Φj1j2 is a C∞−diffeomorphism of open sets on the unit sphere.A pseudodifferential operator A on Q is naturally defined such that in every
chart (U,ϕ) the local representation AU of A in this chart is a psdo of the classOPSm
1,0(Rn). We consider a psdo A as acting in Sobolev spaces Hs(Q,E) of sections
of Hermitian vector bundles p : E → Q of the dimension N over Q. We introduce acompactification Q of the manifold Q by a set of “infinitely distant points”. For thestudy of the Fredholm property of A : Hs(Q,E) → Hs−m(Q,E), we use the localprinciple which reduces the study of Fredholmness to the study of local invertibilityat every point of Q. The investigation of local invertibility at finite points of themanifold Q is standard, and the main problem is the local invertibility at infinitelydistant points of Q. To this end, we apply the limit operators method. The mainresult of this part is a theorem affirming that A : Hs(Q,E) → Hs−m(Q,E) is aFredholm operator if and only if A is an elliptic operator at every point of themanifold Q and all naturally defined limit operators are invertible.
In Section 4, we consider the class of pseudodifferential operators on Q withslowly oscillating symbols. For operators in this class, the limit operators havesymbols in the local coordinates depending on the impulse variables only. In thissection we also consider operators with symbols continuously extended on the setof infinitely distant points of Q. In this case, the set of limit operators for everyinfinitely distant point of Q is a singleton.
Section 5 is devoted to the essential spectra of realizations of pseudodifferentialoperators of positive orders as unbounded operators in L2(Q,E). As an application,we consider the essential spectrum of Schrodinger operators with slowly oscillatingpotentials on Q.
It should be noted that the non-compact manifolds under consideration areincluded in a class of more general non-compact manifolds with bounded geom-etry (see [20]). The essential self-adjointness and the discreteness of the spectraof Schrodinger operators on non-compact manifolds with bounded geometry wasconsidered in [19] (see also references given in these papers). But it seems thatin the framework of manifolds with bounded geometry without additional assump-tion, it is impossible to obtain results on the Fredholm property of differential andpseudodifferential operators.

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 279
1.1. Notations. We will use the following notations.
• Given Banach spaces X, Y , we denote the Banach space of all bounded linearoperators acting from X in Y by B(X, Y ). We denote by K(X,Y ) the subspaceof compact operators. In case X = Y , we simply write B(X),K(X).
• Let x = (x1, . . . , xn) ∈ Rn. Then we denote by ξ = (ξ1, . . . , ξn) ∈ Rn thepoints of the dual space with respect to the scalar product 〈x, ξ〉 = x · ξ =x1ξ1 + . . .+ xnξn.
• For j = 1, . . . , n, let ∂xj:= ∂
∂xj. More generally, given a multi-index α =
(α1, . . . , αn), set |α| := α1 + . . .+ αn, ∂αx := ∂α1
x1. . . ∂αn
xn, and
Dαx = (−i∂x1
)α1 . . . (−i∂xn)αn .
• We set 〈ξ〉 := (1 + |ξ|2)1/2 for ξ ∈ Rn, and 〈D〉 = (I −Δ)1/2.• Let Ω be a subset of Rn. We denote by:
(i) C∞(Ω) the set of all infinitely differentiable functions on Ω, that is, therestrictions on Ω of functions in C∞(Rn);
(ii) C∞0 (Ω) the set of all functions in C∞(Ω) with a compact support in Ω;
(iii) C∞b (Rn) the subspace of all functions a ∈ C∞(Rn) such that
supx∈Rn
|(∂αx a)(x)| <∞
for every α ∈ Nn0 , N0 = {0} ∪ N, C∞
b (Ω) is the space of the restrictions onΩ ⊂ Rn functions in C∞
b (Rn);(iv) SO∞(Rn) (⊂ C∞
b (Rn)) is the set of slowly oscillating at infinity functions,that is, functions a ∈ C∞
b (Rn) such that limx→∞ ∂xja(x) = 0, j = 1, . . . , n.
Let a ∈ SO∞(Rn), Rn � hl →∞, and there exist liml→∞ a(x+hl) = ah(x)in the topology C∞(Rn). Then the function ah(x) is independent of x. IfΩ ⊂ Rn is an unbounded set, then SO∞(Ω) is the space of the restrictionson Ω of functions in SO∞(Rn).
• If a is a function, then aI is the operator of multiplication by a.• Let R > 0. Then B′
R = {x ∈ Rn : |x| > R} .• Let g ∈ Rn. We denote by Vg the shift operator: Vgu(x) = u(x− g), x ∈ Rn.• We denote by KΩ,R = {x ∈ Rn : x = tω, ω ∈ Ω, t > R > 0} the conical set gener-
ated by Ω where Ω is an open set on the unit sphere Sn−1.• As usual, we denote by Hs(Rn), s ∈ R the Sobolev space of distributions u such
that ‖u‖Hs(Rn) =(∫
Rn |u(ξ)|2 〈ξ〉2sdξ)1\2
<∞ where u is the Fourier transform
in the sense of distributions.
1.2. Pseudodifferential operators.We say that a function a ∈ C∞(Rn × Rn) belongs to Sm
1,0(Rn) if
(1) |a|l1,l2 :=∑
|α|≤l1,|β|≤l2,
sup(x, ξ)∈Rn×Rn
∣∣(∂βx∂
αξ a(x, ξ))
∣∣ 〈ξ〉−m+|α|<∞
for every l1, l2 ∈ N0. The semi-norms |a|l1,l2 define a Frechet topology on Sm1,0(R
n).The functions in Sm
1,0(Rn) are called symbols. With each symbol a ∈ Sm
1,0(Rn), we
associate the pseudodifferential operator Op(a) which acts on u ∈ C∞0 (Rn) as
(2) (Op(a)u)(x) = (2π)−n
∫Rn
dξ
∫Rn
a(x, ξ)u(y)ei(x−y)·ξdy.
The following propositions describe the main properties of pseudodifferentialoperators in the class OPSm
1,0(Rn).

280 V. RABINOVICH
Proposition 1. Let Op(aj) ∈ OPSmj
1,0 (Rn), j = 1, 2. Then Op(a2)Op(a1) =
Op(a) ∈ OPSm1+m21,0 (Rn), where
(3) a(x, ξ) = a2(x, ξ)a1(x, ξ) + r(x, ξ),
and r ∈ Sm1+m2−11,0 (Rn).
An operator A∗ is called the formal adjoint to the operator A ∈ OPSm1,0(R
n)if for arbitrary functions u, v ∈ C∞
0 (Rn)
〈Au, v〉L2(Rn) = 〈u, A∗v〉L2(Rn).
Note that A∗ is adjoint to A in L2(Rn) if m = 0.
Proposition 2. Let A = Op(a) ∈ OPSm1,0(R
n). Then A∗ = Op(a) ∈ OPSm1,0(R
n)where
(4) a(x, ξ) = a(x, ξ) + r(x, ξ)
where r ∈ Sm1+m2−11,0 (Rn).
Proposition 3. Let A = Op(a) ∈ OPSm1,0(R
n). Then A : Hs(Rn)→ Hs−m(Rn)is bounded and
‖A‖B(Hs(Rn),Hs−m(Rn)) ≤ C|a|2N,2N
where C > 0 and N ∈ N are independent of A.
We say that a symbol a ∈ Sm1,0(R
n) is slowly oscillating at infinity if for everymultiindex α and multiindex β �= 0
(5) limx→∞
supξ∈Rn
∣∣(∂βx∂
αξ a(x, ξ))
∣∣ 〈ξ〉−m+|α|= 0.
We denote the class of the slowly oscillating symbols by Smsl (R
n), and we denote by
Sm(Rn) the class of symbols for which condition (5) is satisfied for all multiindicesα, β ∈ N0. The appropriate classes of pseudodifferential operators are denoted byOPSm
sl (Rn), OP Sm(Rn).
Note that the operators Op(a) ∈ OPSm−ε(Rn), ε > 0 are compact operatorsfrom Hs(Rn) into Hs−m(Rn).
Proposition 4. Let Op(aj) ∈ OPSmj
sl (Rn), j = 1, 2. Then Op(a2)Op(a1) =
Op(a) ∈ OPSm1+m2
sl (Rn), where
(6) a(x, ξ) = a2(x, ξ)a1(x, ξ) + r(x, ξ),
where r ∈ Sm1+m2−1(Rn).
We say that A ∈ OPSm1,0(D) where D is an open set in Rn if A is the
restriction on D of an operator B ∈ OPSm1,0(R
n), that is, A = rDBiD, whererD : C∞(Rn) → C∞(D), iD : C∞
0 (D)→C∞(Rn) are operators of the naturalrestriction and extension. Let Kj = KΩj ,R, j = 1, 2, be the conical sets inRn, ϕ : K1 → K2 be a diffeomorphism of the form
K2 � y = ϕ(x) = |x|Φ(
x
|x|
), x ∈ K1,
where Φ : Ω1 → Ω2 is a diffeomorphism of the set on the unit sphere Sn−1. Notethat ϕ′ is a homogeneous matrix-function. Hence
‖∂αϕ′(x)‖B(Rn) ≤ Cα |x|−|α|

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 281
for every α ∈ N0. Let ϕ∗ : C∞0 (K1)→ C∞
0 (K2), ϕ∗ : C∞(K2)→ C∞(K1) be defined
as
(ϕ∗u) (y) = u(ϕ−1(y)), (ϕ∗v) (x) = v(ϕ(x)).
Proposition 5. Let A = Op(a) ∈ OPSm1,0(K2). Then A1 = ϕ∗Aϕ∗ = Op(a1) ∈
OPSm1,0(K1), and
a1(x, ξ) = a(ϕ(x),[tϕ′(x)
]−1ξ) + r(x, ξ),
where r ∈ Sm−1(Rn).
1.3. Local invertibility and limit operators. We introduce a compactifi-cation Rn of the space Rn obtained by joining an infinitely distant point x∞ toevery ray l emanating from the origin. A topology in Rn is introduced such thatRn is isomorphic to the closed unit ball B1 = {x ∈ Rn : |x| ≤ 1} . The fundamentalsystem of the neighborhoods of the point x ∈ Rn is formed by the standard systemof neighborhoods of this point, and the fundamental system of neighborhoods ofthe point x∞ is formed by the conical sets U ∈ Rn intersecting with a ray lx∞
associated with the point x∞. We denote by Rn∞ = Rn�Rn the set of all infinitely
distant points of the compactification Rn. If U is an unbounded set, then we willdenote by U its closure in Rn.
Definition 6. (i) We say that ψ ∈ C∞0 (Rn) is a cut-off function of the neigh-
borhood Ux0of the point x0 ∈ Rn if suppψ ⊂ Ux0
, 0 ≤ ψ(x) ≤ 1, and there existsa neighborhood of U ′
x0of x0 such that U ′
x0⊂ Ux0
, and ψ(x) = 1 for x ∈ U ′x0;
(ii) We say that ψ ∈ C∞b (Rn) is a cut-off function of the conical setK if suppψ ⊂
K, 0 ≤ ψ(x) ≤ 1, and there exists an open conical set K′ such that K′ ⊂ K andψ(x) = 1 for every x ∈ K′;
Definition 7. We say that an operator A : Hs(Rn) → Hs−m(Rn) is locally
invertible at the point x ∈ Rn if there exists a neighborhood Ux of this point, acut-off function ψ of Ux, and operators Lx,Rx belonging B(Hs−m(Rn), Hs(Rn))such that
LxAψI = ψI,ARxψI = ψI.
We say that a symbol a ∈ Sm1,0(R
n) belongs to a class Sm(Rn) if the function
a 〈ξ〉−mis extended to a function a ∈ C(Rn × Rn). We denote by OPSm(Rn) the
corresponding class of pseudodifferential operators. The main symbol of Op(a) ∈OPSm(Rn) is defined as
a0(x, ω) = limt→+∞
a(x, tω)t−m, (x, ω) ∈ Rn × Sn−1.
Proposition 8. Let Op(a) ∈ OPSm(Rn). Then Op(a) : Hs(Rn)→ Hs−m(Rn)is locally invertible at a point x0 ∈ Rn if and only if
a0(x0, ω) �= 0
for every point ω ∈ Sn−1.
Let h = (hk)∞k=1 be a sequence of points hk ∈ Rn such that hk → x∞. We
denote the set of all such sequences by Ex∞ .

282 V. RABINOVICH
Definition 9. We say that Ah is a limit operator of A ∈ B(Hs(Rn), Hs−m(Rn))defined by a sequence h ∈ Ex∞ if for every function ψ ∈ C∞
0 (Rn)
limk→∞
∥∥(V−hkAVhk
−Ah)ψI∥∥B(Hs(Rn),Hs−m(Rn))
= 0,
limk→∞
∥∥ψ(V−hkAVhk
−Ah)∥∥B(Hs(Rn),Hs−m(Rn))
= 0.
We denote by Limx∞ A the set of all limit operators of A defined by the sequencesh ∈ Ex∞ . We say that A ∈ B(Hs(Rn), Hs−m(Rn)) is a rich operator if everysequence h ∈ E∞ω
has a subsequence g defining the limit operator Ag.
One can prove that every operator Op(a) ∈ OPSm(Rn) is a rich operator.
Proposition 10. ([8], [13], [14], [9], [10]) Let A = Op(a) ∈ OPSm(Rn).Then Op(a) : Hs(Rn) → Hs−m(Rn) is locally invertible at the point x∞ ∈ R∞if and only if all limit operators Ah ∈ Limx∞(A) are invertible from Hs(Rn) intoHs−m(Rn).
Note that the limit operators for operators inOPSmsl (R
n) are of the formOp(ah)where the symbol ah(x, ξ) = ah(ξ) is independent of the variable x. Hence the limitoperators Op(ah) are invertible if and only if
(7) infξ∈Rn
∣∣ah(ξ)∣∣ 〈ξ〉−m > 0.
All limit operators of the operator Op(a) ∈ OPS(Rn) are 0−operators.Of course, all results of Sections 2.1, 2.2 carry over to matrix pseudodifferential
operators with obvious changes of formulations.
2. Fredholm property of pseudodifferential operatorson manifolds in R(n)
2.1. Non-compact manifolds with conical structure at infinity. LetQ be a C∞ non-compact manifold of a finite dimension n. We use the followingnotation: C∞(Q) is the space of infinitely differentiable functions on Q; C∞
b (Q) isthe subspace of C∞(Q) consisting of functions bounded with all their derivatives;C∞
0 (Q) is the subspace of C∞(Q) consisting of functions with compact supports.
Definition 11. We denote by R(n) a class of non-compact C∞ manifolds Qof finite dimension n ∈ N such that that there exists a finite covering Q ⊂
⋃j∈J Uj
by open sets Uj and homeomorphisms ϕj : Uj → ϕj(Uj) onto open sets Rn. LetJ = J ′ ∪ J”, and J ′ ∩ J” = ∅. We suppose that ϕj(Uj), j ∈ J ′ are open boundedsets in Rn, and ϕj(Uj), j ∈ J” are open conical sets in Rn. Transition functions
ϕj2◦ϕ−1j1
: ϕj1(Uj1∩Uj2)→ ϕj2(Uj1∩Uj2), j1 ∈ J ′ are C∞−diffeomorphisms of open
bounded sets, and transition functions ϕj2 ◦ϕ−1j1
: ϕj1(Uj1 ∩Uj2)→ ϕj2(Uj1 ∩Uj2),j1, j2 ∈ J” are diffeomorphisms of conical sets in Rn of the form:(
ϕj2 ◦ ϕ−1j1
)(x) = |x|Φj1j2
(x
|x|
), x ∈ ϕj1(Uj1 ∩ Uj2),
where Φj1j2 is a C∞−diffeomorphism of open sets on the unit sphere. The pair(Uj , ϕj) is called a chart.
We denote by Q = Q ∪ Q∞ a compactification of Q by adjoining a set Q∞ of“infinitely distant points” such that the pair (Q,Q∞) is localy homeomorphic to
the pair (Rn,Rn∞). This means that every point q ∈ Q has a fundamental system of

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 283
neighborhoods homeomorphic to open bounded sets in Rn, and a point q∞ ∈ Q∞has a fundamental system of neighborhoods homeomorphic to open conical setsin Rn.
Remark 12. Note that the derivative(ϕj1 ◦ ϕ−1
j2
)′, j1, j2 ∈ J2, is a homoge-
neous infinitely differentiable matrix-valued function on ϕ2(U1 ∩ U2). Hence
(8)∥∥∥∂α
((ϕj1 ◦ ϕ−1
j2
)′(x)
)∥∥∥B(Rn)
≤ Cα |x|−|α|, x > R > 0
for every α.
Let ρ = (ρq)q∈Q be a uniform Riemannian metric on Q. This means thatρq : Tq(Q)× Tq(Q)→ R is a bilinear symmetric form such that
infq∈Q
inf‖eq‖Rn=1
ρq(eq, eq) > 0,
where Tq(Q) is the tangent space to Q at the point q isomorphic to Rn. We supposethat the C∞ manifold Q is provided by the structure of the Riemannian manifolddefined by ρ, and ρ(q1, q2) is the Riemannian distance between q1 and q2.
In what follows, we denote by U the closure of U(⊂ Q) in Q.
Definition 13. (i) We say that χU ∈ C∞0 (Q) is a cut-off function of a bounded
open set U ⊂ Q if 0 ≤ χU (x) ≤ 1, suppχU ⊂ U, and there exists a set U ′(U ′ ⊂ U)such that χU (x) = 1 if x ∈ U ′;
(ii) We say that χU ∈ C∞b (Q) is a cut-off function of a neighborhood U of an
infinitely distant point q∞ if 0 ≤ χU (x) ≤ 1, suppχU ⊂ U, there exists anotherneighborhood U ′(U ′ ⊂ U) of q∞ such that χU (x) = 1 if x ∈ U ′;
Let pE : E → Q be an N dimensional Hermitian vector bundle over Q ∈ R(n)with a standard fiber CN and the projection pE . We denote by C∞(Q,E) thespace of C∞-sections of the bundle pE : E → Q, and by C∞
0 (Q,E) the subspaceof C∞(Q,E) of sections with compact supports. Let (Uj,ϕj)j∈J be the abovedefined finite atlas of charts on Q. We assume that E |Uj
is a trivial bundle, and
let τEUj
: E |Uj→ ϕ(Uj) ⊗ CN be a trivialization of E over Uj consistent with the
homeomorphisms ϕ : U → ϕ(U) introduced in Definition 11. We introduce themappings(τEUj
)∗: C∞(Uj , E)→ C∞(ϕ(Uj))⊗ CN ,
(τEUj
)∗: C∞
0 (ϕ(Uj))⊗ E → C∞0 (Uj , E).
It follows from the definition of the manifold Q ∈ R(n) that there exists a finitepartition of the unity ∑
j∈J
χj(q) = 1, q ∈ Q,
subordinate to the covering {Uj}j∈J ; and if ϕj : Uj → Vj ⊂ Rn are coordinate
mappings, then χj ◦ ϕ−1j satisfies the estimates
(9)∣∣∂α
(χj ◦ ϕ−1
j
)(x)
∣∣ ≤ Cα 〈x〉−|α|
for every α. We denote by Hs(Q,E) the Sobolev space of sections u of the bundleE obtained by the closure of C∞
0 (Q,E) in the norm
(10) ‖u‖Hs(Q,E) =∑j∈J
∥∥∥(τEUj
)∗(χju)
∥∥∥Hs(ϕj(Uj))⊗CN
.

284 V. RABINOVICH
One can prove that another partition of unity leads to a norm equivalent to (10).Note that H0(Q,E) = L2(Q,E) where L2(Q,E) is a Hilbert space with a scalar
product
〈u, v〉 =∑j∈J
∫ϕj(Uj)
((τEUj
)∗(χju) (x),
(τEUj
)∗(χjv) (x))CNdx,
where (·, ·)CN is the scalar product in Cn.
2.2. Pseudodifferential operators on manifolds in R(n).
Definition 14. We say that an operator A : C∞0 (Q,E) → C∞(Q,E) is a
pseudodifferential operator in the class OPSm(Q,E) if for every local chart (U,ϕ)(U is not necessary a connected set) the operator
AU =(τEU
)∗rUAiU
(τEU
)∗ : C∞
0 (ϕ(U))→ C∞(ϕ(U))
is a pseudodifferential operators in the class OPSm(ϕ(U)) ⊗ B(RN ), where iU :C∞
0 (U,E)→ C∞0 (Q,E) is the imbedding operator and rU : C∞(Q,E)→ C∞(U,E)
is the restriction operator.
We note some standard properties of the operators in the class OPSm(Q,E)which are proved by means of finite partitions of the unity and passing to theoperators in the class OPSm(Rn)⊗ B(RN ) in the local charts.
(1) A pseudodifferential operator A ∈ OPSm(Q,E) is extended to a boundedoperator from Hs(Q,E) in Hs−m(Q,E) for every s ∈ R.
(2) Let Aj ∈ OPSmj(Q,E), j = 1, 2. Then the product A2A1 is well-definedand A2A1 ∈ OPSm1+m2 (Q,E) .
(3) Let A ∈ OPSm(Q,E) and a formally adjoint operator A∗ be defined as
〈A∗u, v〉L2(Q,E) = 〈u,Av〉L2(Q,E) , u, v ∈ C∞0 (Q,E) .
Then A∗ ∈ OPSm(Q,E) also.(4) Note if m = 0, then A∗ is extended to the adjoint operator of A.
(5) Let F1,F2 be two open sets in Q such that F1 ∩ F2 = ∅, and A ∈OPSm(Q,E). Then χF1
AχF2I ∈ K(Hs(Q,E), Hs−m(Q,E)), where χF
is a cut-off function of a set F .(6) The main symbol of A ∈ OPSm(Q,E) is defined by the standard way. Let
π : S∗0(Q)→ Q be the bundle of the unit spheres in the cotangent bundle
T ∗Q, and let π∗E be the induced bundle. A mapping σA ∈ Hom(π∗E)is called the main symbol of the operator A ∈ OPSm(Q,E) if for everylocal chart (U,ϕ), U ⊂ Q the main symbol a0U (x, ξ) of the operator AU
coincides with a representation of σA in the local chart (U,ϕ).(7) We say that the operator A is elliptic if
inf(x,ξ)∈U×Sn−1
∣∣det a0U (x, ξ)∣∣ > 0
for every local chart (U,ϕ), and we say that the operator A is uniformlyelliptic if
infU⊂Q
inf(x,ξ)∈U×Sn−1
∣∣det a0U (x, ξ)∣∣ > 0.

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 285
(8) Let A ∈ OPSm(Q,E) be a uniformly elliptic operator. Then for everys ∈ R the following a priori estimate holds:
(11) ‖u‖Hs(Q,E) ≤ C(‖Au‖Hs−m(Q,E) + ‖u‖Hs−1(Q,E))
with a constant C > 0 independent of u.
2.3. Fredholm property of pseudodifferential operators on manifoldsin R(n).
Definition 15. We say that an operator A ∈B(Hs(Q,E),Hs−m(Q,E)) is lo-
cally invertible at a point q ∈ Q if there exist a neighborhood U of q, a cut-offfunction χU of U, and operators LU ,RU ∈ B(Hs−m(Q,E),Hs(Q,E)) such that
LUAχUI = χUI, χUARU = χUI.
Definition 16. We say that A ∈B(Hs(Q,E),Hs−m(Q,E)) is a local type op-
erator on Q if for every open sets F1,F2 ⊂ Q such that F1 ∩ F2 = ∅, the operatorχF1
AχF2I ∈ K(Hs(Q,E),Hs−m(Q,E)).
Proposition 17. (see [17], [6]) Let A ∈B(Hs(Q,E), Hs−m(Q,E)) be a local
type operator on Q. Then A is a Fredholm operator if and only if A is locallyinvertible at every point q ∈ Q.
We consider now the Fredholm property of A ∈ OPSm(Q,E) as the opera-tor acting from Hs(Q,E) into Hs−m(Q,E). Following Proposition 17, we have to
consider the local invertibility of A at every point of the compact set Q.It is well known (see for instance [18]) that A ∈ OPSm(Q,E) is locally invert-
ible at the point q0 ∈ Q if and only if the main symbol σA is invertible at this point.This means that if q0 ∈ U and (U,ϕ) is a chart, then
(12) infξ∈Sn−1
∣∣det a0U (ϕ−1(q0), ξ)∣∣ > 0.
Note that condition (12) is independent of the choice of the chart.The next step is the study of the local invertibility at the points q∞ ∈ Q∞. To
this end, we introduce the set of limit operators of A at this point. Let (U,ϕ) be
a local chart such that q∞ ∈ U , let AU = Op(aU ) ∈ OPS(Rn)⊗ B(CN ) be a localrepresentation of A in this chart (U,ϕ) and let Limx∞(AU ) be the set of all limit
operators AgU of AU defined by sequences ϕ(U) � gm → x∞ = limq→q∞ ϕ(q) ∈ Rn.
It is easy to see that the operator A : Hs(Q,E)→ Hs−m(Q,E) is locally invertibleat the point q∞ if and only if the operatorAU is locally invertible at the point x∞. Itfollows from Proposition 8 that AU is locally invertible at the point x∞ if and only ifall limit operators Ag
U ∈ Limx∞(AU ) are invertible as acting from Hs(Rn)⊗B(CN )into Hs−m(Rn) ⊗ B(CN ). We prove now that this condition is independent ofthe choice of the chart. Indeed, let AU1
= Op(aU1) ∈ OPS(Rn) ⊗ B(CN ) be a
representation of A in a local chart (U1, ϕ1) and let ψ = ϕ ◦ ϕ−11 : ϕ1(U ∩ U1) →
ϕ(U∩U1) be a diffeomorphism. We suppose that q∞ = ϕ1(x1∞). Then Proposition 5
implies that
aU1(x, ξ) = aU (ψ(x), [
τψ′(x)]−1
ξ) + r(x, ξ),
where r ∈ S(Rn) ⊗ CN . Note that ψ′(x) is a homogeneous matrix function. Thisimplies that if the sequence Rn � hm → x1
∞ where x1∞ defined by a point ω1 on
the unit sphere, then
(13) limm→∞
τψ′(x+ hm) = τψ′(ω).

286 V. RABINOVICH
We can choose ψ such that ψ′(ω) = IRn . The limit operators AhU1
defined by the
sequence hm → x1∞ has the symbol ahU1
(x, ξ) = limm→∞ aU1(x+ hm, ξ) where the
limit is understood in the sense of the convergence in C∞(Rn×Rn). Then applying(13) we obtain that
aU1(x+ hm, ξ) = aU (ψ(x+ hm), [τψ′(x+ hm)]
−1ξ) + r(x+ hm, ξ)(14)
= aU (ψ(hm), ξ) + r1(x+ hm, ξ),
where limm→∞ r1(x + hm, ξ) = 0 in C∞(Rn × Rn). Equality (14) implies that thesequence h = (hm) defines the limit operator Ah
U1∈ Limx1
∞AU1
if and only if
the sequence ψ(h) = (ψ(hm)) defines the limit operators Aψ(h)U ∈ Limx∞ AU , and
AhU1
= Aψ(h)U . Let
ψ : Limx1∞AU1
→ Limx∞
AU
be defined as follows: ψ(AhU1) = Aψ(h)
U . The mapping ψ has the inverse ψ−1 :
Limx∞ AU → Limx1∞AU1
defined by the diffeomorphism ψ−1 : ϕ2(U ∩ U1) →ϕ1(U ∩ U1) and acting as ψ−1(Ag
U ) = Aψ−1(g)U1
. This implies that Limx∞ AU =
ψ(Limx1∞AU1
). Formula (15) implies that the set Limx∞ AU consists of invertibleoperators if and only if the set Limx1
∞AU1
consists of invertible operators also.
Thus the following theorem is proved.
Theorem 18. An operator A ∈ OPSm(Q,E) acting from Hs(Q,E) intoHs−m(Q,E) is a Fredholm operator if and only if :
(i) the main symbol σA is invertible at every point of S∗0 (Q) where S∗
0 (Q) isthe bundle of the unit spheres in the cotangent bundle T ∗Q.
(ii) for every point q∞ ∈ Q∞, there exists a chart (U,ϕ) such that Rn � x∞ =limq→q∞ ϕ(q) and all limit operators Ah
U ∈ Limx∞ AU of the representa-tion A in the chart (U,ϕ) are invertible from Hs(Rn) into Hs−m(Rn).
Remark. As we proved above, condition (ii) is independent of the choice ofthe representation AU of A in the chart (U,ϕ).
3. Subclasses of pseudodifferential operators on the manifold Q
3.1. Pseudodifferential operators with slowly oscillating symbols.
Definition 19. We say that an operator A : C∞0 (Q,E) → C∞(Q,E) is a
pseudodifferential operator in the class OPSmsl (Q,E) (OPSm
0 (Q,E)) if for everylocal chart (U,ϕ) (U is not necessary a connected set) the operator
AU =(τEU
)∗rUAiU
(τEU
)∗ : C∞
0 (ϕ(U))→ C∞(ϕ(U))
is a pseudodifferential operator in the class OPSmsl (ϕ(U))⊗B(RN ) (OPSm
0 (ϕ(U))⊗B(RN )). We say in this case that the operator A has a slowly oscillating symbol.
We note some properties of operators in OPSmsl (Q,E) :
(1) Let Aj ∈ OPSmj
sl (Q,E), j = 1, 2. Then the product A2A1 is well-defined
and A2A1 ∈ OPSm1+m2
sl (Q,E) .(2) LetA ∈ OPSm
sl (Q,E).Then the formally adjoint operatorA∗ ∈OPSmsl (Q,E)
also.

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 287
Let AU = Op(aU) ∈ OPSsl(Rn) ⊗ B(CN ) be a representation of A in thelocal chart (U,ϕ) and let Limx∞(AU ) be the set of all limit operators Ag
U of AU
defined by sequences ϕ(U) � gm → x∞ = ϕ(q∞) ∈ Rn. Then all limit operatorsAg
U ∈ Limx∞(AU ) are of the form
AgU = Op(agU(ξ)),
where agU (ξ) = limm→∞ agU (x+ gm, ξ) is independent of x. Hence AgU : Hs(Rn)→
Hs−m(Rn) is invertible if and only if
infξ∈Rn
∣∣∣det(agU (ξ) 〈ξ〉−m)∣∣∣ > 0.
Hence for operators in the class OPSmsl (Q,E), the condition of local invertibility at
the point q∞ ∈ Q∞ takes the form
(15) lim infx→x∞
infξ∈Rn
∣∣∣det(aU (x, ξ) 〈ξ〉−m)∣∣∣ > 0.
Let AU1= Op(aU1
) be a representation of A in another local chart (U1, ϕ1) such
that x1∞ = ϕ1(q∞) ∈ Rn. Then applying the change of the variables in pseudodif-
ferential operators in OPSm(Rn), we obtain that condition (15) is equivalent tothe condition:
(16) lim infx→x1
∞infξ∈Rn
∣∣∣det(aU1(x, ξ) 〈ξ〉−m
)∣∣∣ > 0.
That is condition (15) is independent of a local chart.
Theorem 20. Let A ∈ OPSmsl (Q,E). Then A : Hs(Q,E) into Hs−m(Q,E) is
a Fredholm operator if and only if :
(i) the main symbol σA is invertible at every point (q, η) ∈ S∗0 (Q);
(ii) for every point q∞ ∈ Q∞ there exists a chart (U,ϕ) such that Rn � x∞ =limq→q∞ ϕ(q), AU = Op(aU ) and condition ( 15) holds.
3.2. Pseudodifferential operators with continuous symbols. We saythat an operator A : C∞
0 (Q,E) → C∞(Q,E) is a pseudodifferential operator in
the class OPSm(Q, E) if A ∈ OPSmsl (Q,E) and for every local chart (U,ϕ) there
is an extension aU of aU with respect to x on ϕ(U) × Rn. In this case, the setAg
U ∈ Limx∞ AU is a singleton AgU = Op(aU (x∞, ξ)) and the condition (15) accepts
the simplest form
(17) infξ∈Rn
∣∣∣det(aU (x∞, ξ) 〈ξ〉−m)∣∣∣ > 0.
For operators in OPSm(Q, E), there exists a globally defined symbol at infinity.First we define a cotangent bundle over Q∞. Let q∞ ∈ Q∞, (Uj , ϕj) be charts suchthat xj
∞ = limq→q∞ ϕj(q). We say that the triples (Uj , xj∞, ej), ej ∈ Rn, j = 1, 2,
are equivalent if x2∞ =
(ϕ2 ◦ ϕ−1
1
)(x1
∞) and e2 = τ (ϕ2 ◦ ϕ−11 )′e1. The chain rule
provides all properties of the equivalence. This class of the equivalence definesa cotangent vector at the point q∞. We denote by T ∗
q∞ the set of all cotangentvectors at the point q∞. One can introduce the structure of the vector space onT ∗q∞ . Let T ∗(Q∞) =
⋃q∞∈Q∞
T ∗q∞ and π∞ : T ∗(Q∞)→ Q∞ be a natural projection
consistent with local charts of Q. Then the topology in T ∗(Q∞) is introduced suchthat π∞ : T ∗(Q∞) → Q∞ is a continued mapping. We say that π∞ : T ∗(Q∞) →Q∞ is the cotangent bundle over set Q∞ of all infinitely distant points of Q.

288 V. RABINOVICH
A mapping σ∞(A) ∈ Hom(π∗∞E) is called the symbol at infinity of the operator
A ∈ OPSm(Q,E) if aU coincides with a representation of σ∞(A) in the local chart(U,ϕ).
Theorem 21. Let A ∈ OPSm(Q, E). Then A : Hs(Q,E) into Hs−m(Q,E) isa Fredholm operator if and only if :
(i) the main symbol σA is invertible at every point (q, η) ∈ S∗0 (Q);
(ii) the symbol σ∞(A) ∈ Hom(π∗∞E) is invertible. It means that for every
point q∞ ∈ Q∞ and for every chart (U,ϕ) condition ( 17) holds.
4. Essential spectrum of pseudodifferential operators on non-compactmanifolds
Let A ∈ OPSm(Q,E), m > 0, be uniformly elliptic. We will consider A asan unbounded operator in L2(Q,E) with domain Hm(Q,E) dense in L2(Q,E).Uniform ellipticity of A implies a priori estimate (11). Hence
(18) ‖u‖Hm(Q,E) ≤ C(‖Au‖L2(Q,E) + ‖u‖L2(Q,E)).
It follows from (18) that the operator A with domain Hm(Q,E) is closed inL2(Q,E).
We recall that an unbounded closed operator A in a Hilbert space H with densein H domain D(A) is called a Fredholm operator if kerA and cokerA = H/ ImAare finite dimensional spaces.
One can prove that A is a Fredholm operator as an unbounded operator withdomain Hm(Q,E) if and only if A : Hm(Q,E)→ L2(Q,E) is a Fredholm operatoras a bounded operator.
We denote by spH A the spectrum of A as an unbounded operator in H, andwe denote by sp essH A the essential spectrum of A, that is, the set of points λ ∈ Csuch that A − λI is not a Fredholm operator in H as unbounded operator withdomain D(A).
Theorem 18 yields the following result.
Theorem 22. Let A ∈ OPSm(Q,E), m > 0, and A be a uniformly ellipticoperator. Then
(19) sp essA =⋃
q∞∈Q∞
⋃Ag
Uq∞∈Limx∞ AUq∞
spL2(Rn)⊗B(CN )AgUq∞
,
where (Uq∞ , ϕq∞) is a local chart in a neighborhood Uq∞ of the point q∞, and AUq∞is a realization of A in the chart (Uq∞ , ϕq∞) such that x∞ = limq→q∞ ϕq∞(q).
Note that the right side of formula (19) is independent of the choice of the localcharts.
4.1. Essential spectrum of the Schrodinger operators on Q.
Definition 23. We say that a function a ∈ C∞b (Q) is slowly oscillating at
infinity and belongs to the class SO∞(Q) if a ◦ ϕ ∈ SO∞(ϕ(U)) for every chart(U,ϕ).
We set
alim inf = lim infq→∞
a(q) = infq∈Q∞
lim infq→q∞∈Q∞
a(q).

FREDHOLM PROPERTY AND PSEUDODIFFERENTIAL OPERATORS 289
One can see that
lim infq→q∞∈Q∞
a(q) = lim infx→x∞
(a ◦ ϕ) (x), x∞ = limq→q∞
ϕq∞(q).
We consider a Schrodinger operator −Δ + aI on Q where −Δ is a non nega-tive Laplacian on Q, and the electric potential a ∈ SO∞(Q). Let ρ = (ρjk) be aRiemannian metric on Q. In the chart (U,ϕ) where ϕ(U) ⊂ Rn is a conical set, wehave
(−ΔUf) (x) =
−1√det ρ(ϕ−1(x))
n∑j,k=1
∂xj
√det ρ(ϕ−1(x))ρjk(ϕ−1(x))∂xk
f(x), x ∈ ϕ(U).
The limit operators of Δ(g)U defined by the sequences gm → x∞ = limq→q∞ ϕ(q) are
of the form
−Δ(g)U u(x) = −
n∑j,k=1
(ρjk
)g∂xj
∂xku(x), x ∈ Rn,
where(ρjk
)g= limgm→x∞
(ρjk(ϕ−1(gm))
). Since the Riemannian metric ρ is uni-
formly positive, the operator −Δ(g)U is a non negative operator in L2(Rn). This
implies that
spL2(Rn)(−ΔgU + (a ◦ ϕ)g I) = [(a ◦ ϕ)g ,+∞).
Then applying formula (19), we obtain that
sp essL2(Q)(−Δ+ aI) =⋃
q∞∈Q∞
[lim inf
x→ϕ−1(q∞)(a ◦ ϕ) (x),+∞
)= [alim inf ,+∞).
References
[1] H. O. Cordes, The technique of pseudodifferential operators, London Mathematical SocietyLecture Note Series, vol. 202, Cambridge University Press, Cambridge, 1995. MR1314815(96b:35001)
[2] Albert K. Erkip and Elmar Schrohe, Normal solvability of elliptic boundary value problemson asymptotically flat manifolds, J. Funct. Anal. 109 (1992), no. 1, 22–51, DOI 10.1016/0022-1236(92)90010-G. MR1183603 (94f:58126)
[3] D. Kapanadze and B.-W. Schulze, Boundary value problems on manifolds with exits to in-finity, Rend. Sem. Mat. Univ. Politec. Torino 58 (2000), no. 3, 301–359 (2002). Partial dif-ferential operators (Torino, 2000). MR1984195 (2004d:58031)
[4] B. V. Lange and V. S. Rabinovich, Pseudodifferential operators in Rn and limit operators(Russian), Mat. Sb. (N.S.) 129(171) (1986), no. 2, 175–185, 303. MR832115 (87g:35242)
[5] E. M. Mukhamadiev, Normal solvability and Noethericity of elliptic operators in spaces offunctions on Rn. I (Russian), Zap. Nauchn. Sem. Leningrad. Otdel. Mat. Inst. Steklov.(LOMI) 110 (1981), 120–140, 244. Boundary value problems of mathematical physics andrelated questions in the theory of functions, 13. MR643980 (84a:35073)
[6] V.S. Rabinovich, Pseudo-differential equations on non bounded domains with conical struc-ture at infinity, Math. Sbornik, 30 (122), no. 1, (1969), no. 9, 77-97; translation in: Math.USSR, Sbornik 9 (1969), no. 1, 73-92).
[7] V.S. Rabinovich, Pseudo-differential operators on a class of noncompact manifolds, Math.Sbornik 89 (131), (1972), no. 1 (9), 46-60.
[8] V.S. Rabinovich, Fredholmness of pseudo-differential operators on Rn in the scale of Lp,q-spaces, Siberian Math. J. 29 (1988), no. 4, 635-646; translation in: Siberian Math. J. 29(1988), no. 4, 635-646).

290 V. RABINOVICH
[9] V. S. Rabinovich, Essential spectrum of perturbed pseudodifferential operators. Applicationsto the Schrodinger, Klein-Gordon, and Dirac operators, Russ. J. Math. Phys. 12 (2005),no. 1, 62–80. MR2179335 (2006h:35194)
[10] V. S. Rabinovich, The essential spectrum of pseudodifferential operators withoperator symbols (Russian), Dokl. Akad. Nauk 440 (2011), no. 5, 593–596, DOI10.1134/S1064562411060317; English transl., Dokl. Math. 84 (2011), no. 2, 685–688.MR2963682
[11] V. S. Rabinovich and S. Rokh, Exponential estimates for the eigenfunctions of matrix ellipticdifferential operators, and limit operators (Russian), Dokl. Akad. Nauk 424 (2009), no. 3,318–321, DOI 10.1134/S1064562409010190; English transl., Dokl. Math. 79 (2009), no. 1,66–69. MR2513156 (2010a:35176)
[12] V. S. Rabinovich and S. Roch, Exponential estimates of solutions of pseudodifferen-tial equations with operator-valued symbols: Applications to Schrodinger operators withoperator-valued potentials, Complex analysis and dynamical systems IV. Part 2, Con-temp. Math., vol. 554, Amer. Math. Soc., Providence, RI, 2011, pp. 147–163, DOI10.1090/conm/554/10967. MR2884401
[13] V. S. Rabinovich, S. Roch, and B. Silbermann, Fredholm theory and finite section method forband-dominated operators, Integral Equations Operator Theory 30 (1998), no. 4, 452–495,DOI 10.1007/BF01257877. Dedicated to the memory of Mark Grigorievich Krein (1907–1989).MR1622360 (99f:47037)
[14] V. S. Rabinovich, S. Roch, and B. Silbermann, Band-dominated operators with operator-valued coefficients, their Fredholm properties and finite sections, Integral Equations OperatorTheory 40 (2001), no. 3, 342–381, DOI 10.1007/BF01299850. MR1840187 (2002d:47101)
[15] Vladimir Rabinovich, Steffen Roch, and Bernd Silbermann, Limit operators and their appli-cations in operator theory, Operator Theory: Advances and Applications, vol. 150, BirkhauserVerlag, Basel, 2004. MR2075882 (2005e:47002)
[16] Elmar Schrohe, Frechet algebra techniques for boundary value problems on noncompact man-ifolds: Fredholm criteria and functional calculus via spectral invariance, Math. Nachr. 199(1999), 145–185, DOI 10.1002/mana.19991990108. MR1676318 (2000b:58046)
[17] I. B. Simonenko, A new general method of investigating linear operator equations of singular
integral equation type. I (Russian), Izv. Akad. Nauk SSSR Ser. Mat. 29 (1965), 567–586.MR0179630 (31 #3876)
[18] M. A. Shubin, Pseudodifferential operators and spectral theory, Springer Series in SovietMathematics, Springer-Verlag, Berlin, 1987. Translated from the Russian by Stig I. Anders-son. MR883081 (88c:47105)
[19] M.A. Shubin, Spectral theory of the Schrodinger operators on noncompact manifolds, qualitiveresults, in: Spectral Theory and Geometry (B. Davies & Yu. Safarov, eds.), Cambridge Univ.Press, Cambridge, 1998.
[20] M. A. Shubin, Weak Bloch property and weight estimates for elliptic operators, Seminaire sur
les Equations aux Derivees Partielles, 1989–1990, Ecole Polytech., Palaiseau, 1990, pp. Exp.No. V, 36. With an appendix by Shubin and J. Sjostrand. MR1073180 (92f:58167)
[21] Michael E. Taylor, Pseudodifferential operators, Princeton Mathematical Series, vol. 34,Princeton University Press, Princeton, N.J., 1981. MR618463 (82i:35172)
National Polytechnic Institute of Mexico, ESIME Zacatenco, Mexico
E-mail address: [email protected]

Contemporary MathematicsVolume 653, 2015http://dx.doi.org/10.1090/conm/653/13200
Overdetermined Transforms in Integral Geometry
B. Rubin
Abstract. We consider an example of the Gelfand-Gindikin n-dimensionalcomplex of k-dimensional planes in Rn. Sharp existence conditions andinversion formulas are obtained for the corresponding restricted k-plane trans-form of Lp functions. Similar results are obtained for overdetermined Radontype transforms on the sphere and the hyperbolic space. A topological isomor-phism of the relevant Schwartz spaces with respect to the restricted k-planetransform is established. Related open problems, in particular, the restrictedlower dimensional Busemann-Petty problem for sections of convex bodies, arediscussed.
1. Introduction
The k-plane Radon-John transform of a function f on Rn is a mapping
(1.1) Rk : f(x)→ ϕ(τ ) =
∫τ
f(x) dτx,
where τ is a k-dimensional plane in Rn, 1 ≤ k ≤ n − 1, and dτx is the Euclideanvolume element on τ ; see, e.g., [18,19,32,33]. We denote by Πn,k the manifoldof all non-oriented k-dimensional planes in Rn. If k < n − 1, then dimΠn,k ≡(k + 1)(n− k) > n. In this case the inversion problem for Rk is overdetermined ifall τ ∈ Πn,k are considered. Gel’fand’s celebrated question is how to reduce thisoverdeterminedness or, more precisely, how to define an n-dimensional submanifoldΠn,k of Πn,k so that f(x) could be recovered, knowing ϕ(τ ) only for τ ∈ Πn,k; see,e.g., [16]. Following [26, Chapter II, Section 1] and [17, Section 3], we call suchgood submanifolds complexes.
The prolific background of the related theory was developed in Gel’fand’sschool; see, e.g., [17, 18, 20–25, 27, 36, 42]. The inversion formulas in most ofthese publications rely on the concepts of the kappa-operator (for k even) and theCrofton operator (for k odd, when the formulas are nonlocal). An alternative ap-proach to nonlocal inversion formulas, which employs the Fourier integral operators,was suggested by Greenleaf and Uhlmann [30]. In all these works, the Radon typetransforms are studied mainly on smooth rapidly decreasing functions.
In the present article, Πn,k is the manifold of all k-dimensional planes in Rn
which are parallel to a fixed (k+1)-dimensional coordinate plane. This simple case
2010 Mathematics Subject Classification. Primary 44A12; Secondary 47G10.Key words and phrases. Radon transforms, k-plane transforms, inversion formulas, range
characterization, Lp spaces.
c©2015 B. Rubin
291

292 B. RUBIN
falls into the scope of Example 1 from Gelfand and Gindikin [17, Section 3].1 Thecorresponding restricted Radon-John transform has the form
(1.2) (Rkf)(τ ) = (Rkf)(τ )|τ∈Πn,k.
It is known [56,61,63] that for f ∈ Lp(Rn), (Rkf)(τ ) is finite for almost all τ ∈ Πn,k
provided that 1 ≤ p < n/k, and this condition is sharp. However, Πn,k has measure
zero in Πn,k. Thus, our first goal is to investigate the existence of (Rkf)(τ ) andobtain inversion formulas for this operator on generic functions f ∈ Lp(Rn).
The second goal is to do a similar work for totally geodesic Radon-like trans-forms on the sphere and the hyperbolic space. In spite of the known fact thatthese transforms are projectively equivalent to the Euclidean one, the Lp-theory isdifferent in each case. Note also that the inversion formulas look more transparentin the original terms, rather than as a result of changing variables in some fixedmodel.
Our third goal is to study the range Rk(X) where X = S(Rn) is the Schwartzspace of rapidly decreasing smooth functions on Rn. Although diverse range char-acterizations of the nonrestricted k-plane transform on S(Rn) are known (see[28, 29, 31, 39, 48–51]), we could not find any publication related to the rangedescription of the restricted transform (1.2).
Here the following remark should be taken into account. The trivial tensorstructure of the complex Πn,k yields an impression that the action of Rk on S(Rn)can be fully characterized by the simple transference of known results for the hyper-plane Radon transform. These results can be found in [26,32,34,35,40,41,62].Alas, this is not so! The crux of the matter is that the methods of these works donot provide information about the continuity of the Radon transform and its inversein the topology of the corresponding Schwartz spaces. To retrieve this information,the proofs must be essentially revised and all skipped details completed. Further-more, in the case of the restricted transform (1.2), the “free variable” cannot beignored, because it contributes to the corresponding norm estimates. In addition tothe bijectivity of Rk, we shall prove an isomorphism of this operator in the respec-tive topologies. This result is new even for k = n− 1 and complements Helgason’sbijectivity theorem [32, Theorem 2.4, p. 5] for the classical Radon transform.
In the present article we do not discuss the boundedness properties of therestricted transform Rkf and focus only on the existence of this integral (the samefor the elliptic and hyperbolic cases). This topics lies beyond the scope of ourpaper. Some estimates for this particular operator can be derived from the Oberlin-Stein-Strichartz estimates [46, 63] and formulated in terms of the correspondingmixed norms. Extensive information about the action of the nonrestricted k-planetransforms in Lebesgue spaces can be found, e.g., in [10,12,59]. One should addthat there is a vast literature devoted to Lp continuity of diverse restricted andoverdetermined Radon-like transforms which differ from ours; see, e.g., Oberlin[43–45], Christ [11], Brandolini, Greenleaf, and Travaglini [7], Erdogan and Oberlin[14].
The article is organized as follows. In Section 2 we obtain sharp conditionsfor the existence of Rkf on Lp functions and the corresponding inversion formulas,which follow from known facts for the codimension 1 case. Here we invoke the
1The author discovered the class Πn,k independently and found it in [17] after the manuscript
had been submitted.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 293
previous author’s results, which rely on the methods of harmonic analysis andfractional integration. Similar questions are studied in Sections 3 and 4 for totallygeodesic Radon transforms on the sphere and the hyperbolic space. Here we usethe same idea, according to which the ambient space is foliated by spaces of lowerdimension, and then we apply the classical transforms on the leaves of the foliation.
Section 5 conceptually pertains to Section 2. The main result is the Isomor-phism Theorem 5.5 for the operator Rk on the space S(Rn). For convenience ofthe reader, we give a detailed self-contained proof of this theorem using the basicideas from Helgason [32] with some simplifications due to Carton-Lebrun [9]. Thenovelty of our proof is that it gives not only the bijectivity, but also the continuityof Rk and its inverse in the respective topologies.
In Section 6, we suggest open problems related to the dual of Rk. This operatortakes functions on the relevant complex to functions on the ambient space. Inparticular, we recall the lower dimensional Busemann-Petty problem for sections ofconvex bodies in Rn, which is still open for 2- and 3-dimensional sections of bodieswhen n ≥ 5; see, e.g., [15,38,57]. In some cases this problem is overdetermined. Wesuggest the restricted version of this problem, which actually inspired the presentinvestigation.
Acknowledgement. The author is grateful to the referee for valuable remarksand suggestions.
2. The k-plane Transform on Rn
2.1. Definitions. We fix an orthonormal basis e1, . . . , en in Rn and set
(2.1) Rk+1 = Re1 ⊕ · · · ⊕ Rek+1, Rn−k−1 = Rek+2 ⊕ · · · ⊕ Ren.
For x ∈ Rn, we write x = (x′, x′′) where x′ ∈ Rk+1, x′′ ∈ Rn−k−1. Let Πn,k be the
manifold of all k-planes in Rn, which are parallel to Rk+1. Every plane τ ∈ Πn,k isparametrized by the triple
(θ, s;x′′) ∈ Zn,k = Sk × R× Rn−k−1,
where Sk is the unit sphere in Rk+1. Specifically,
τ ≡ τ (θ, s;x′′) = τ0 + x′′, τ0 = {x′ ∈ Rk+1 : θ · x′ = s}.We equip Zn,k with the measure dτ = d∗θdsdx
′′ where d∗θ is the normalized surfacemeasure on Sk. For the corresponding nonnormalized measure, denoted by dθ, wehave dθ = σkd∗θ where σk =
∫Sk dθ = 2πk+1/Γ((k + 1)/2) is the surface area of
Sk. Clearly, dim Πn,k = n and
(2.2) τ (θ, s;x′′) = τ (−θ,−s;x′′) ∀ (θ, s;x′′) ∈ Zn,k.
The restricted k-plane transform (1.2) has the form
(2.3) (Rkf)(θ, s;x′′) =
∫θ⊥∩Rk+1
f(sθ + u, x′′) dθu,
where dθu is the volume element of θ⊥ ∩ Rk+1. We also write
(2.4) (Rkf)(θ, s;x′′) = (Rfx′′)(θ, s), fx′′(·) = f(·, x′′),
where R is the usual hyperplane Radon transform in Rk+1; cf. [32]. Thus, Rkf isactually a “partial” Radon transform of f in the x′-variable and, therefore, manyproperties of R can be transferred to Rk. Below we review some of them.

294 B. RUBIN
2.2. Existence on Lp-functions.
Theorem 2.1. The integral Rkf is finite a.e. on Zn,k if f is locally integrableaway of the coordinate plane Rn−k−1 and
(2.5)
∫|x′′|<a
dx′′∫|x′|>1
|f(x′, x′′)||x′| dx′ <∞ ∀ a > 0.
This statement follows immediately from [58, Theorem 3.2].
Corollary 2.2. If f ∈ Lp(Rn), 1 ≤ p < (k+1)/k, then (Rkf)(τ ) is finite for
almost all τ ∈ Πn,k. If p ≥ (k + 1)/k, then there is a function f0 ∈ Lp(Rn), for
which (Rkf0)(τ ) ≡ ∞ on Πn,k.
Proof. The first statement follows from (2.5) by Holder’s inequality. For thesecond statement we can take, e.g.,
(2.6) f0(x) =(2 + |x′|)−(k+1)/p e−|x′′|2
log1/p+δ(2 + |x′|), 0 < δ < 1/p′, 1/p+ 1/p′ = 1.
�
We observe that the condition p < (k + 1)/k differs from p < n/k for thenonrestricted k-plane transform.
2.3. Inversion Formulas. Let 1 ≤ p < (k + 1)/k. Suppose that
(2.7)
∫|x′′|<a
dx′′∫Rk+1
|f(x′, x′′)|p dx <∞ ∀ a > 0.
Then ϕ = Rkf is well-defined by Theorem 2.1 and the function fx′′(x′) ≡ f(x′, x′′)belongs to Lp(Rk+1) for almost all x′′ ∈ Rn−k−1. Furthermore, the functionϕx′′(θ, s) ≡ ϕ(θ, s;x′′) has the form
(2.8) ϕx′′(θ, s) = (Rfx′′)(θ, s)
where R is the usual hyperplane Radon transform in Rk+1. Hence, inverting Rby any known method (see, e.g., [56, 58]), we reconstruct fx′′(x′) ≡ f(x). Forexample, if k = 1 and f ∈ Lp(Rn), 1 ≤ p ≤ 2, then, by the formula (5.12) from[56], we have
(2.9) f(x) =1
π
∫ ∞
0
(R∗ϕx′′)(x′)− (R∗tϕx′′)(x′)
t2dt.
Here x′ ∈ R2, x′′ ∈ Rn−2,
(R∗tϕx′′)(x′) =
∫Sk
ϕx′′(θ, x′ · θ + t) d∗θ, (R∗ϕx′′)(x′) = (R∗tϕx′′)(x′)
∣∣t=0
.
The integral∫∞0
(·) is understood as limε→0
∫∞ε
(·) for almost all x = (x′, x′′) in Rn or
in the Lp(R2)-norm for almost all x′′ ∈ Rn−2.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 295
3. The Elliptic Case
3.1. Definitions. The n-dimensional elliptic space is realized as the unitsphere Sn in Rn+1 with identified antipodal points. According to this realization,the Radon-like transformations in this section will be considered on even functionson Sn. Given 1 ≤ k ≤ n − 1, let Ξn,k be the manifold of all k-dimensional totallygeodesic submanifolds ξ of Sn. This manifold is isomorphic to the GrassmannianGn+1,k+1 of (k+1)-dimensional linear subspaces of Rn+1. For an integrable functionf on Sn, the totally geodesic transform Fkf is defined by the formula
(3.1) (Fkf)(ξ) =
∫ξ
f(θ) dξθ, ξ ∈ Ξn,k,
where dξθ denotes the O(n + 1)-invariant probability measure on ξ. The casek = n− 1 gives the Funk transform [19,32] denoted by F .
Suppose k < n−1. Then dimΞn,k = dimGn+1,k+1 = (k+1)(n−k) > n and theinversion problem for Fkf is overdetermined. Our aim is to define an n-dimensionalcomplex Ξn,k in Ξn,k, so that f could be reconstructed from (Fkf)(ξ), ξ ∈ Ξn,k.Let
(3.2) Rn−k = Re1 ⊕ · · · ⊕ Ren−k, Rk+1 = Ren−k+1 ⊕ · · · ⊕ Ren+1,
(3.3) Rk+2 = Ren−k ⊕ Rk+1, Sk+1 = Sn ∩ Rk+2.
Given a point v ∈ Sn−k−1 = Sn ∩Rn−k, we fix an orthogonal transformation γv inRn−k, so that γven−k = v. Let
(3.4) γv =
[γv 00 Ik+1
].
We denote by Ξk(γvSk+1) the set of all k-dimensional totally geodesic submanifolds
of the (k+1)-dimensional sphere γvSk+1 and introduce the n-dimensional complex
(3.5) Ξn,k =⋃
v∈Sn−k−1
Ξk(γvSk+1).
The restriction Fkf of Fkf onto Ξn,k is actually a function on the set Sn,k ={(v, w) : v ∈ Sn−k−1, w ∈ Sk+1}. This function is defined by
(3.6) (Fkf)(v, w) =
∫{η∈Sk+1: η·w=0}
f(γvη) dwη = (Ffv)(w).
Here (Ffv)(w) is the usual Funk transform on Sk+1 of the “rotated” function
fv(η) = f(γvη). Clearly, (Fkf)(v, w) = (Fkf)(±v,±w) with any combination ofpluses and minuses.
3.2. Existence on Lp-functions. We equip Sn,k with the product measured∗vd∗w where d∗v and d∗w stand for the corresponding probability measures onSn−k−1 and Sk+1
v . The existence of Fkf is equivalent to the existence of the Funktransform Ffv. The latter is well-defined whenever fv ∈ L1(Sk+1) and may notexist otherwise (take, e.g., fv(η) = |ηn+1|−1 /∈ L1(Sk+1), for which (Ffv)(ζ) ≡ ∞;cf. [54, formula (2.12)]). This observation yields the following.
Lemma 3.1. Let 1 ≤ k ≤ n− 1,
(3.7)
∫Sn
|f(θ)| d∗θ
|θ′|n−k−1<∞

296 B. RUBIN
where θ′ = (θ1, . . . , θn−k) is the orthogonal projection of θ onto the coordinate planeRn−k. Then
(3.8)
∫Sn,k
(Fkf)(v, w) d∗vd∗w =2σn
σk+1σn−k−1
∫Sn
f(θ)d∗θ
|θ′|n−k−1.
Proof. If k = n − 1, then (3.8) is a particular case of the duality for Radontype transforms [32]. Denote the left-hand side of (3.8) by I. Since∫
Sk+1
(Ffv)(w) d∗w =
∫Sk+1
fv(η) d∗η, fv(η) = f(γvη),
then
I =
∫Sn−k−1
d∗v
∫Sk+1
(Fkf)(v, w)d∗w =
∫Sn−k−1
d∗v
∫Sk+1
(Ffv)(ζ) d∗ζ
=
∫Sn−k−1
d∗v
∫Sk+1
fv(η) d∗η =1
σk+1
∫Sn−k−1
d∗v
∫Sk+1
f(γvη) dη(3.9)
=1
σk+1
∫Sn−k−1
d∗v
∫ π
0
sink ψ dψ
∫Sk
f(v cosψ + ω sinψ) dω.
Using the bi-spherical coordinates [64, pp. 12, 22]
(3.10) θ = v cosψ + ω sinψ, dθ = sink ψ cosn−k−1 ψ dψdvdω,
v ∈ Sn−k−1 ⊂ Rn−k, ω ∈ Sk ⊂ Rk+1, 0 ≤ ψ ≤ π/2,
and noting that cosψ = |θ′|, we continue:
I =2
σk+1σn−k−1
∫ π/2
0
sink ψ dψ
∫Sn−k−1
dv
∫Sk
f(v cosψ + ω sinψ) dω
=2σn
σk+1σn−k−1
∫Sn
f(θ)d∗θ
|θ′|n−k−1,
as desired. �
Theorem 3.2. Let 1 ≤ k < n − 1, f ∈ Lp(Sn), n − k < p ≤ ∞. Then
(Fkf)(v, w) is finite for almost all (v, w) ∈ Sn,k and the operator Fk is bounded
from Lp(Sn) to L1(Sn,k). If p ≤ n − k, then there is a function f ∈ Lp(Sn) for
which (Fkf)(v, w) =∞. Specifically,
f(θ) = |θ′|−1(1− log |θ′|)−1, θ′ = (θ1, . . . , θn−k).
Proof. The first statement follows from (3.8) by Holder’s inequality, becausethe integral∫
Sn
d∗θ
|θ′|(n−k−1)p′ = σk σn−k−1
∫ π/2
0
sink ψ cos(n−k−1)(1−p′) ψ dψ,1
p+
1
p′= 1,
is finite if n− k < p. To prove the second statement, we have∫Sn
|f(θ)|p dθ = σk σn−k−1
∫ π/2
0
(1− log(cosψ))−p sink ψ cosn−k−1−p ψ dψ
= σk σn−k−1
∫ 1
0
(1− log s)−p(1− s2)(k−1)/2 sn−k−1−p ds.
This integral is finite if p ≤ n− k, 1 ≤ k < n− 1.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 297
Let us show that (Fkf)(v, w) ≡ (F fv)(w) = ∞. For η = (ηn−k, . . . , ηn+1) ∈Sk+1 ⊂ Rk+2 (see (3.3)), we have fv(η) = |ηn−k|−1 (1− log |ηn−k|)−1. Let rw be anorthogonal transformation in Rk+2 such that rwen−k = w, and let Sk be the unitsphere in Rk+1. Setting η = rwu, we have
(F fv)(w) =
∫η·w=0
|ηn−k|−1 (1− log |ηn−k|)−1 dwη
=
∫Sk
|rwu · en−k|−1 (1− log |rwu · en−k|)−1 du,
where
|rwu · en−k| = |u · r−1w en−k| = |u · PrRk+1(r−1
w en−k)| = h |u · σ|,
h = |PrRk+1(r−1w en−k)|, σ = PrRk+1(r−1
w en−k)/h ∈ Sk.
Hence,
(F fv)(w) =
∫Sk
(h |u · σ|)−1 (1− log(h |u · σ|))−1 du
=2σk−1
h
∫ 1
0
(1− t2)k/2−1
t (1− log(th))dt ≥ ck
h
∫ 1/2
0
dt
t (1− log(th)),
ck = const. The last integral diverges. �
3.3. Inversion Formulas. To reconstruct f from Fkf , it suffices to invertthe usual Funk transform F in (3.6) by any known method; see, e.g., [19,32,47,
52–54,58]. Let ϕv(w) = (Fkf)(v, w). Then
(3.11) fv(η) ≡ f(γvη) = (F−1ϕv)(η).
If f is a continuous function, then its value at a point θ ∈ Sn can be found asfollows. Interpret θ as a column vector θ = (θ1, . . . , θn+1)
T and set
θ′ = (θ1, . . . , θn−k)T ∈ Rn−k, θ′′ = (θn−k+1, . . . , θn+1)
T ∈ Rk+1,
(3.12) v = θ′/|θ′| ∈ Sn−k−1, η = (0, . . . , 0, |θ′|, θ′′)T ∈ Sk+1.
If θ′ �= 0, then γvη = θ and we get f(θ) = (F−1ϕv)(η) for v and η as in (3.12).If θ′ = 0, then f(θ) can be reconstructed by continuity from its values at theneighboring points.
If f is an arbitrary function satisfying (3.7), for instance, f ∈ Lp(Sn), n− k <p ≤ ∞, then the integral ∫
Sn−k−1
d∗v
∫Sk+1
|fv(η)| d∗η
is finite; see calculations after (3.9). Hence, by (3.11), f can be explicitly recon-structed at almost all points on almost all spheres Sk+1
v = γvSk+1 by making use
of known inversion formulas for the Funk transform on this class of functions; see,e.g., [53,54,58].
4. The Hyperbolic Case
Below we extend the reasoning from the previous sections to totally geodesictransforms of functions on the real hyperbolic space Hn.

298 B. RUBIN
4.1. Preliminaries. We recall basic facts. More details can be found in [4,5,55,64]; see also [19,26]. Let En,1 ∼ Rn+1, n ≥ 2, be the real pseudo-Euclideanspace of points x = (x1, . . . , xn+1) with the inner product
(4.1) [x, y] = −x1y1 − · · · − xnyn + xn+1yn+1.
The n-dimensional real hyperbolic space Hn is realized as the “upper” sheet of thetwo-sheeted hyperboloid
(4.2) Hn = {x ∈ En,1 : [x, x] = 1, xn+1 > 0}.For x ∈ Hn, we can write
(4.3) x = θ sinh r + en+1 cosh r
where r ≥ 0 and θ is a point of the unit sphere Sn−1 in Rn = Re1 ⊕ · · · ⊕Ren. Wedenote by SO0(n, 1) the connected group of pseudo-rotations of En,1 which preservethe bilinear form (4.1); SO(n) is the rotation group in Rn which is identified withthe subgroup of all pseudo-rotations leaving en+1 fixed. In accordance with (4.3),the SO0(n, 1)-invariant measure dx on Hn is defined by dx = sinhn−1r dθdr wheredθ has the same meaning as in the previous section. Then
(4.4)
∫Hn
f(x) dx =
∫ ∞
0
sinhn−1r dr
∫Sn−1
f(θ sinh r + en+1 cosh r) dθ.
We will need a generalization of (4.3) of the form
(4.5) x = v sinh r + u cosh r,
v ∈ Sn−k−1 ⊂ Rn−k, u ∈ Hk ⊂ Ek,1 ∼ Rk+1, 0 ≤ r <∞, 0 ≤ k < n,
where Rn−k and Rk+1 have the same meaning as in (3.2). Then
(4.6) dx = dv du dν(r), dν(r) = sinhn−k−1 r coshk r dr,
dv and du being the Riemannian measures on Sn−k−1 and Hk, respectively; see[64, pp. 12, 23]. Owing to (4.5),
(4.7)
∫Hn
f(x) dx =
∫ ∞
0
dν(r)
∫Sn−k−1
dv
∫Hk
f(v sinh r + u cosh r) du.
The case k = 0 agrees with (4.4). If k = n− 1, then (4.7) yields
(4.8)
∫Hn
f(x) dx =
∫ ∞
−∞coshn−1r dr
∫Hn−1
f(e1 sinh r + u cosh r) du.
We will also need the one-sheeted hyperboloid∗Hn = {y ∈ En,1 : [y, y] = −1}.
Every point y ∈∗Hn is represented as
y = σ cosh ρ+ en+1 sinh ρ, −∞ < ρ <∞, σ ∈ Sn−1.
In this notation, the SO0(n, 1)-invariant measure dy on∗Hn has the form
(4.9) dy = coshn−1ρ dσdρ.
The hyperbolic Radon transform of a sufficiently good function f on Hn is a
function on∗Hn, which is defined by the formula
(4.10) (Hf)(y) =
∫ξy
f(x) dyx, ξy = {x ∈ Hn : [x, y] = 0}, y ∈∗Hn.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 299
Here dyx is the image of the standard measure on the hyperboloid Hn−1 = {x ∈Hn : xn = 0} under the transformation ωy ∈ SO0(n, 1) satisfying ωyHn−1 = ξy.
Theorem 4.1. [4, Corollaries 3.7, 3.8] The integral ( 4.10) is finite for almost
all y ∈∗Hn whenever
(4.11)
∫Hn
|f(x)| dx
xn+1<∞.
In particular, ( 4.10) is finite a.e. if f ∈ Lp(Hn),
(4.12) 1 ≤ p < (n− 1)/(n− 2).
The condition ( 4.12) is sharp. Moreover, for every σ ∈ Sn−1,
(4.13)
∫ ∞
−∞(Hf)(σ cosh ρ+ en+1 sinh ρ)
dρ
cosh ρ=
∫Hn
f(x)dx
xn+1
and this expression does not exceed c ||f ||p, c = const.
Explicit inversion formulas for Hf and other properties of this transform canbe found in [1–4,32,53,55,63].
4.2. Radon Transforms over k-geodesics in Hn. In the following, En,1 =Rn−k × Ek,1 where
(4.14) Rn−k = Re1 ⊕ . . .⊕ Ren−k, Ek,1 ∼ Rk+1 = Ren−k+1 ⊕ . . .⊕ Ren+1.
We will use the same notation Ξn,k, as in Section 3, for the set of all k-dimensionaltotally geodesic submanifolds (k-geodesics, for short) ξ of Hn. The correspondingRadon-like transform is defined by
(4.15) (Hkf)(ξ) =
∫ξ
f(x) dξx ≡∫Hk
f(rξx) dHkx,
where Hk = Hn ∩ Rk+1, rξ ∈ SO0(n, 1) is a pseudo-rotation that takes Hk to ξ,and the measure dHkx on Hk is defined in a standard way. If f ∈ Lp(Hn), then(Hkf)(ξ) is finite for almost all ξ ∈ Ξn,k provided that
(4.16) 1 ≤ p < (n− 1)/(k − 1).
This condition is sharp [5,63].Suppose k < n − 1 and let Hk+1 = Hn ∩ (Rn−k ⊕ Ek,1); cf. (4.14). To define
an n-dimensional complex Ξn,k in Ξn,k, we proceed as in Section 3. Fix a pointv ∈ Sn−k−1 ⊂ Rn−k and let γv : en−k → v be the transformation (3.4). We denoteby Ξk(γvHk+1) the set of all k-dimensional totally geodesic submanifolds of the(k + 1)-dimensional hyperboloid γvHk+1. Then we take the union of all these sets
(4.17) Ξn,k =⋃
v∈Sn−k−1
Ξk(γvHk+1).
The restriction Hkf of Hkf onto Ξn,k is a function on the set
Hn,k = {(v, w) : v ∈ Sn−k−1, w ∈∗Hk+1}.
Specifically,
(4.18) (Hkf)(v, w) =
∫{η∈Hk+1: [η,w]=0}
f(γvη) dwη = (Hfv)(w)

300 B. RUBIN
where (Hfv)(w) is the usual hyperbolic Radon transform of fv(η) = f(γvη) onHk+1 over k-geodesics.
4.3. Existence on Lp-functions. We equip Hn,k with the product measure
dvdw, where dv and dw are canonical measures on Sn−k−1 and∗Hk+1
v , respectively;
cf. (4.9). The existence of Hkf is equivalent to the existence of Hfv on Hk+1. Thelatter is characterized by Theorem 4.1 that should be applied to fv. To reformulatethe conditions of that theorem in terms of f , we need the following
Lemma 4.2. The equality
(4.19)
∫Sn−k−1
dv
∫Hk+1
fv(η) dη = 2
∫Hn
f(x)
|x′|n−k−1dx, x′ = (x1, . . . , xn−k),
holds provided that either side of it is finite when f is replaced by |f |.
Proof. Let η = ηn−k en−k+ η, η = (ηn−k+1, . . . ηn+1). Then γvη = v ηn−k+ ηand (4.8) yields
l.h.s =
∫Sn−k−1
dv
∫Hk+1
f(v ηn−k + η) dη
=
∫Sn−k−1
dv
∫ ∞
−∞coshkr dr
∫Hk
f(v sinh r + u cosh r) du
= 2
∫ ∞
0
dν(r)
sinhn−k−1r
∫Sn−k−1
dv
∫Hk
f(v sinh r + u cosh r) du,
dν(r) = sinhn−k−1 r coshk r dr. By (4.7), the result follows. �
Theorem 4.3. Let 1 ≤ k ≤ n−1. The integral (Hkf)(v, w) is finite for almost
all (v, w) ∈ Hn,k provided that
(4.20)
∫Hn
|f(x)|p dx
|x′|n−k−1<∞, 1 ≤ p < k/(k − 1).
Proof. If f satisfies (4.20), then, by (4.19), fv ∈ Lp(Hk+1). Hence, by Theo-
rem 4.1, (Hkf)(v, w) = (Hfv)(w) is finite for almost all v ∈ Sn−k−1 and w ∈∗Hk+1.
This gives the result. �
Remark 4.4. The restriction 1 ≤ p < k/(k − 1) is sharp, as in Theorem 4.1,and the bound k/(k − 1) is smaller than (n− 1)/(k − 1) if k < n− 1; cf. (4.16).
4.4. Inversion Formulas. To reconstruct an arbitrary function f satisfying(4.20) from ϕ(v, w) = (Hkf)(v, w), it suffices to invert the usual hyperbolic Radontransform (Hfv)(ζ). Using any known inversion formula for H (see, e.g., [4,32,53,55]), we get
(4.21) fv(η) ≡ f(γvη) = (H−1ϕv)(η).
Since fv ∈ Lp(Hk+1), 1 ≤ p < k/(k − 1), it can be evaluated at almost all pointsof Hk+1 for almost all v ∈ Sn−k−1. If, in addition to (4.20), f is continuous,then, to find the value of f at a point x ∈ Hn, we regard x as a column vectorx = (x1, . . . , xn+1)
T and set
x′ = (x1, . . . , xn−k)T ∈ Rn−k, x′′ = (xn−k+1, . . . , xn+1)
T ∈ Rk+1,

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 301
v = x′/|x′| ∈ Sn−k−1 ⊂ Rn−k,(4.22)
η = (0, . . . , 0, |x′|, x′′)T ∈ Hk+1 ⊂ Rk+2.(4.23)
Then x = γvη and we get f(x) = (H−1ϕv)(η).
5. The Range of the Restricted k-plane Transform
5.1. Definitions and the Main Result. We will be using the same notationas in Section 2. In the following Z+ = {0, 1, 2, . . .}, Zn
+ = Z+ × · · · × Z+ (n times).The Schwartz space S(Rn) is defined in a standard way with the topology generatedby the sequence of norms
||f ||m = sup|α|≤m
(1 + |x|)m|(∂αf)(x)|, m = 0, 1, 2, . . . .
The Fourier transform of f ∈ S(Rn) has the form
(5.1) (Ff)(y) ≡ f(y) =
∫Rn
f(x) eix·y dx.
The corresponding inverse Fourier transform will be denoted by f .
Definition 5.1. A function g on the sphere Sk ⊂ Rk+1 is called differentiableif the homogeneous function g(x) = g(x/|x|) is differentiable in the usual senseon Rk+1 \ {0}. The derivatives of g will be defined as restrictions to Sk of thecorresponding derivatives of g(x):
(5.2) (∂αθ g)(θ) = (∂αg)(x)
∣∣x=θ
, α ∈ Zk+1+ , θ ∈ Sk.
Definition 5.2. We denote by Se(Zn,k) the space of functions ϕ(θ, s;x′′) on
Zn,k = Sk × R×Rn−k−1, which are infinitely differentiable in θ, s and x′′, rapidlydecreasing as |s|+ |x′′| → ∞ together with all derivatives, and satisfy
(5.3) ϕ(−θ,−s;x′′) = ϕ(θ, s;x′′) ∀ (θ, s;x′′) ∈ Zn,k.
The topology in Se(Zn,k) is defined by the sequence of norms
(5.4) ||ϕ||m = sup|μ|+j+|γ|≤m
supθ,s,x′′
(1 + |s|+ |x′′|)m|(∂μθ ∂
js∂
γx′′ϕ)(θ, s;x
′′)|.
The space Se(Zn) of rapidly decreasing even smooth functions ϕ(θ, s) on Zn =Sn−1 × R is defined similarly.
Remark 5.3. An advantage of Definition 5.2 in comparison with the similarone from [32, p. 5] is that we equip Se(Zn,k) with the natural Schwartz topology,which plays an important role in our consideration.
Definition 5.4. Let SH(Zn,k) denote the subspace of all functions ϕ ∈ Se(Zn,k)satisfying the moment condition: For every m ∈ Z+ there exists a homogeneouspolynomial
Pm(θ, x′′) =∑
|α|=m
cα(x′′) θα
with coefficients cα(x′′) in S(Rn−k−1) such that
(5.5)
∫R
ϕ(θ, s;x′′) sm ds = Pm(θ, x′′).
We equip SH(Zn,k) with the induced topology of Se(Zn,k).

302 B. RUBIN
The main result of this section is the following
Theorem 5.5. The restricted k-plane transform Rk acts as an isomorphismfrom S(Rn) onto SH(Zn,k).
5.2. Auxiliary Statements.
Lemma 5.6.
(i) If f ∈ Ck(Rn), t ∈ R, then for |α| ≤ k and j ≤ k,
(5.6) ∂αx [f(tx/|x|)] = |x|−|α|
|α|∑|γ|=1
t|γ| hα,γ(x/|x|) (∂γf)(tx/|x|),
(5.7)∂j
∂tj[f(tx/|x|)] =
∑|γ|=j
hγ(x/|x|) (∂γf)(tx/|x|),
where hα,γ and hγ are homogeneous polynomials independent of f .(ii) If g ∈ Ck(R+), R+ = (0,∞), then for 1 ≤ |β| ≤ k and x �= 0,
(5.8) ∂βx [g(|x|)] =
|β|∑k=1
|x|k−|β| hβ,k(x/|x|) g(k)(|x|),
where hβ,k are homogeneous polynomials independent of g.
Proof. We proceed by induction. Let |α| = 1, that is, ∂αx = ∂/∂xj for some
j ∈ {1, 2, . . . , n}. Then∂
∂xj[f(tx/|x|)] = t
n∑k=1
(∂kf)(tx/|x|) pj,k(x),
pj,k(x) =∂
∂xj
[xk
|x|
]=
1
|x|
⎧⎪⎨⎪⎩−xkxj
|x|2 if j �= k,
1− x2k
|x|2 if j = k.
This gives (5.6) for |α| = 1. Now the routine calculation shows that if (5.6) holdsfor any |α| = �, then it is true for |α| = �+ 1.
The proof of (5.7) is easier. For j = 1,
∂
∂t[f(tx/|x|)] =
n∑k=1
(∂kf)(tx/|x|)xk
|x| .
The general case follows by iteration. The proof of (5.8) is straightforward byinduction. �
Corollary 5.7. Let f ∈ S(Rn), f(θ, t) = f(tθ), where t ∈ R, θ ∈ Sn−1. Thenfor any m ∈ Z+ there exist N ∈ Z+ and a constant cm,N independent of f suchthat
||f ||m ≡ sup|α|+j≤m
supθ,t|(1 + |t|)m|(∂α
θ ∂jt f)(θ, t)|
≤ cm,N ||f ||N ≡ cm,N sup|γ|≤N
supy(1 + |y|)N |(∂γf)(y)|.
In other words, f → f is a continuous mapping from S(Rn) to Se(Zn).

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 303
Corollary 5.8. The map F1, which assigns to a function w(θ, t) ∈ Se(Zn) itsFourier transform in the t-variable, is an automorphism of the space Se(Zn).
5.3. Proof of Theorem 5.5. We split the proof into several steps.
Proposition 5.9. If f ∈ S(Rn), then Rkf ∈ SH(Zn,k) and the map f → Rkfis continuous.
Proof. By (2.3) and (2.8), the function
(5.9) ϕ(θ, s;x′′) =
∫θ⊥∩Rk+1
f(sθ + u, x′′) dθu = (Rfx′′)(θ, s),
is the usual hyperplane Radon transform in Rk+1 of fx′′(x′) = f(x′, x′′). Hence,(5.5) follows from the equalities∫
R
ϕ(θ, s;x′′) sm ds =
∫R
(Rfx′′)(θ, s) sm ds =
∫Rk+1
f(x′, x′′)(x′ · θ)k dx′.
The evenness property (5.3) is a consequence of (5.9). Furthermore, by the Projection-Slice Theorem,
[ϕ(θ, ·;x′′)]∧(η) = [(Rfx′′)(θ, ·)]∧(η) = [f(·, x′′)]∧(ηθ).
Hence, A : f → ϕ = Rkf is a composition of three mappings, specifically, A =A3A2A1, where
A1 : f(x) → [f(·, x′′)]∧(ξ′) ≡ g(ξ′, x′′);A2 : g(ξ′, x′′) → g(θη, x′′) ≡ w(θ, η;x′′);A3 : w(θ, η;x′′) → [w(θ, ·;x′′)]∨(s) ≡ ϕ(θ, s;x′′).
The continuity of the operators
A1 : S(Rn)→ S(Rk+1 × Rn−k−1), A3 : Se(Zn,k)→ Se(Zn,k)
is a consequence of the isomorphism property of the Fourier transform. The conti-nuity of A2 from S(Rk+1×Rn−k−1) to Se(Zn,k) follows from Corollary 5.7 appliedin the ξ′-variable. This gives the result. �
The next proposition is the most technical.
Proposition 5.10. If ϕ ∈ SH(Zn,k), then the function
(5.10) ψ(x) ≡ ψ(x′, x′′) =
∫R
ϕ(x′/|x′|, s;x′′) eis|x′| ds
belongs to S(Rn) and the map ϕ→ ψ is continuous.
Proof. We have to show that for every m ∈ Z+ there exist M = M(m) ∈ Z+
and a constant Cm > 0 independent of ϕ such that ||ψ||m ≤ Cm ||ϕ||M . To thisend, it suffices to prove the following inequalities:
(5.11) sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m |∂px′∂
γx′′ψ(x
′, x′′)| ≤ Cm ||ϕ||M ,
(5.12) sup|p|+|γ|≤m
sup|x′|>1
supx′′
(1 + |x′|+ |x′′|)m |∂px′∂
γx′′ψ(x
′, x′′)| ≤ Cm ||ϕ||M .
In the following, the letters c and C with subscripts stand for constants whichare not necessarily the same in any two occurrences.

304 B. RUBIN
STEP 1 (proof of (5.11). Fix any q ∈ N. By Taylor’s formula,
(5.13) ez =
q−1∑ν=0
zν
ν!+ eq(z), eq(z) =
∞∑ν=q
zν
ν!.
Putting z = is|x′|, we have
ψ(x′, x′′) =
q−1∑ν=0
(i|x′|)νν
∫R
ϕ(x′/|x′|, s;x′′) sν ds
+
∫R
ϕ(x′/|x′|, s;x′′) eq(is|x′|) ds.
By (5.5),
(i|x′|)ν∫R
ϕ(x′/|x′|, s;x′′) sν ds = (i|x′|)νPν(x′/|x′|, x′′)
where Pν(θ, x′′) =
∑|α|=ν cα(x
′′) θα, cα(x′′) ∈ S(Rn−k−1), or, by the homogeneity,
(5.14) (i|x′|)ν∫R
ϕ(x′/|x′|, s;x′′) sν ds = Pν(ix′, x′′).
Hence, for γ ∈ Zn−k−1+ , we may write
(5.15) ∂γx′′ψ(x
′, x′′) =
q−1∑ν=0
Pν,γ(ix′, x′′)
ν!+ Ψq,γ(x
′, x′′),
Pν,γ(ix′, x′′) = (i|x′|)ν
∫R
(∂γx′′ϕ)(x
′/|x′|, s;x′′) sν ds(5.16)
=∑|α|=ν
(∂γcα)(x′′)(ix′)α,(5.17)
(5.18) Ψq,γ(x′, x′′) =
∫R
(∂γx′′ϕ)(x
′/|x′|, s;x′′) eq(is|x′|) ds.
Let us estimate the derivatives (∂px′′Ψq,γ)(x
′, x′′), assuming 0 ≤ |p| < q. For |x′| > 0we have
∂px′ [(∂
γx′′ϕ)(x
′/|x′|, s;x′′) eq(is|x′|)]
=∑
α+β=p
cα,β ∂αx′ [(∂
γx′′ϕ)(x
′/|x′|, s;x′′)] ∂βx′ [eq(is|x′|)].(5.19)
By (5.6),
∂αx′ [(∂
γx′′ϕ)(x
′/|x′|, s;x′′)] = |x′|−|α||α|∑
|μ|=1
hα,μ(x′/|x′|) (∂γ
x′′∂μx′ϕ0)(x
′/|x′|, s;x′′)
where ϕ0(x′, s;x′′) = ϕ(x′/|x′|, s;x′′) and hα,μ are homogeneous polynomials inde-
pendent of ϕ. Thus, by (5.2),
|∂αx′ [(∂
γx′′ϕ)(x
′/|x′|, s;x′′)]|(5.20)
≤ cp |x′|−|α||α|∑
|μ|=1
supθ|(∂γ
x′′∂μθ ϕ)(θ, s;x
′′)|.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 305
To estimate ∂βx′ [eq(is|x′|)], we consider the cases β �= 0 and β = 0 separately. If
β �= 0, then, by (5.8),
(5.21) |∂βx′ [eq(is|x′|)]| ≤
|β|∑j=1
|x′|j−|β| |hβ,j(x′/|x′|)| |s|j |e(j)q (is|x′|)|
where hβ,j are homogeneous polynomials. Since e(j)q (z) = eq−j(z) for any 0 ≤ j ≤ q,
the function
e(j)q (z)
zq−j=
eq−j(z)
zq−j=
1
zq−j
(ez −
q−j−1∑ν=0
zν
ν!
), z ∈ C,
is bounded (check the cases |z| ≤ 1 and |z| > 1 separately). Hence, the expression
(is|x′|)j−q e(j)q (is|x′|) is bounded uniformly in s and x′, and (5.21) yields
|∂βx′ [eq(is|x′|)]| ≤ cβ,q
|β|∑j=1
|x′|j−|β| |s|j |sx′|q−j .
This gives
(5.22) |∂βx′ [eq(is|x′|)]| ≤ cq |x′|q−|β|(1 + |s|)q.
The last estimate extends to β = 0, but the proof in this case is easier. Combining(5.20), (5.22) and (5.19), and keeping in mind that |p| < q, we obtain
|∂px′ [∂
γx′′ϕ(x
′/|x′|, s;x′′) eq(is|x′|)]|
≤ cq(1 + |s|)q( q∑
|μ|=1
supθ|(∂μ
θ ∂γx′′ϕ)(θ, s;x
′′)|) ∑
α+β=p
|x′|q−|β|−|α|
≤ cq(1 + |s|)2 |x
′|q−|p| sup|μ|≤q
supθ,s
(1 + |s|)q+2|(∂μθ ∂
γx′′ϕ)(θ, s;x
′′)|.(5.23)
Since q, γ and |p| < q are arbitrary, the latter means that we can differentiateunder the sign of integration in (5.18) infinitely many times. Moreover, if we fixany m ∈ Z+ and any q > m, then, by (5.23), we obtain
I ≡ sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m |∂px′Ψq,γ)(x
′, x′′)|
≤ sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m∫R
|∂px′ [∂
γx′′ϕ(x
′/|x′|, s;x′′) eq(is|x′|)]| ds
≤ Cq sup|p|+|γ|≤m
sup|x′|<1
|x′|q−|p| supx′′
(1 + |x′′|)m
× sup|μ|≤q
supθ,s
(1 + |s|)q+2|(∂μθ ∂
γx′′ϕ)(θ, s;x
′′)|
≤ Cq sup|p|+|γ|≤m
sup|x′|<1
|x′|q−|p| sup|μ|+|γ|≤m+q+2
× supθ,s,x′′
(1 + |s|+ |x′′|)m+q+2|(∂μθ ∂
γx′′ϕ)(θ, s;x
′′)|
or
I ≤ Cq sup|p|+|γ|≤m
sup|x′|<1
|x′|q−|p| ||ϕ||m+q+2.

306 B. RUBIN
Setting q = m+ 1, we get
(5.24) sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m |∂px′Ψm+1,γ)(x
′, x′′)| ≤ Cm ||ϕ||2m+3.
Let us estimate the derivatives of the first term in (5.15). By (5.16) and (5.17),
(∂px′Pν,γ)(ix
′, x′′) = ∂px′
[(i|x′|)ν
∫R
(∂γx′′ϕ)(x
′/|x′|, s;x′′) sν ds]
=∑|α|=ν
(∂γcα)(x′′) ∂p
x′ [(ix′)α], ν ≤ q − 1.
Hence, if |p| > ν, then (∂px′Pν,γ)(ix
′, x′′) = 0. Suppose |p| ≤ ν. Then
sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m |(∂px′Pν,γ)(ix
′, x′′)|
≤ cp sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m
×∑
α+β=p
|∂βx′ [(i|x′|)ν ]|
∣∣∣ ∫R
∂αx′ [∂
γx′′ϕ)(x
′/|x′|, s;x′′)] sν ds∣∣∣.
By (5.8) and (5.20), the last expression does not exceed the following:
cp,ν sup|p|+|γ|≤m
sup|x′|<1
∑α+β=p
|x′|ν−|β|−|α| supx′′
(1 + |x′′|)m
×∫R
[ |α|∑|μ|=1
supθ|(∂γ
x′′∂μθ ϕ)(θ, s;x
′′)|]sν ds
≤ cp,ν sup|p|+|γ|≤m
sup|x′|<1
|x′|ν−|p| sups,x′′
(1 + |x′′|+ |s|)m+ν+2
×|α|∑
|μ|=1
supθ|(∂γ
x′′∂μθ ϕ)(θ, s;x
′′)|
≤ Cp,ν sup|p|+|γ|≤m
sup|x′|<1
|x′|ν−|p| sup|μ|+|γ|+j≤|p|+m+ν
× supθ,s,x′′
(1 + |x′′|+ |s|)m+ν+2+|p|| (∂γx′′∂
μθ ∂
jsϕ)(θ, s;x
′′)|
≤ Cp,ν sup|p|+|γ|≤m
sup|x′|<1
|x′|ν−|p| ||ϕ||m+ν+2+|p|
≤ Cp,ν ||ϕ||2m+ν+2 ≤ Cm,q ||ϕ||2m+q+1 = Cm ||ϕ||3m+2.
Here we choose q = m+ 1, as in (5.24).Combining the last estimate with (5.15) and (5.24), we obtain
sup|p|+|γ|≤m
sup|x′|<1
supx′′
(1 + |x′′|)m |∂px′∂
γx′′ψ(x
′, x′′)| ≤ Cm (||ϕ||2m+3 + ||ϕ||3m+2).
This gives the first required inequality (5.11).
STEP 2. Let us prove (5.12). Fix any m ∈ Z+. Then integration by partsyields
[ϕ(θ, ·;x′′)]∧(η) = (−iη)−m
∫R
(∂ms ϕ)(θ, s;x′′) eisη ds.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 307
For arbitrary multi-indices γ ∈ Zn−k−1+ and p ∈ Zk+1
+ satisfying |p| + |γ| ≤ m, wehave
(∂px′∂
γx′′ψ)(x
′, x′′) = ∂px′ [(−i|x′|)−mψm,γ(x
′, x′′)],
ψm,γ(x′, x′′) =
∫R
(∂ms ∂γ
x′′ϕ)(x′/|x′|, s;x′′) eis|x
′| ds,
and therefore,
(5.25) |(∂px′∂
γx′′ψ)(x
′, x′′)| ≤ cp∑
u+v=p
|∂ux′ [|x′|−m]| |(∂v
x′ψm,γ)(x′, x′′)|.
By (5.8),
(5.26) |∂ux′ [|x′|−m]| ≤ cm,u |x′|−m−|u|.
To estimate |(∂vx′ψm,γ)(x
′, x′′)|, as in STEP 1, we have
∂vx′ [(∂m
s ∂γx′′ϕ)(x
′/|x′|, s;x′′) eis|x′|]
=∑
α+β=v
cα,β ∂αx′ [(∂m
s ∂γx′′ϕ)(x
′/|x′|, s;x′′)] ∂βx′ [e
is|x′|],(5.27)
where
|∂αx′ [(∂m
s ∂γx′′ϕ)(x
′/|x′|, s;x′′)]|(5.28)
≤ cv |x′|−|α||α|∑
|μ|=1
supθ|(∂μ
θ ∂ms ∂γ
x′′ ϕ)(θ, s;x′′)|;
cf. (5.20). Furthermore, by (5.8), for β �= 0 we have
∂βx′ [e
is|x′|] =
|β|∑j=1
|x′|j−|β| hβ,j(x′/|x′|) (is)j eis|x′|,
where hβ,j are homogeneous polynomials. Hence, since |x′| > 1,
(5.29) |∂βx′ [e
is|x′|]| ≤ cβ
|β|∑j=1
|x′|j−|β||s|j ≤ cβ (1 + |s|)|β|.
This estimate obviously holds if β = 0. Combining (5.27), (5.28), and (5.29), for|v| ≤ |p| we obtain
|∂vx′ [(∂m
s ∂γx′′ϕ)(x
′/|x′|, s;x′′) eis|x′|]|
≤ cv (1 + |s|)|v||v|∑
|μ|=1
supθ|(∂μ
θ ∂ms ∂γ
x′′ϕ)(θ, s;x′′)|
≤ cp(1 + |s|)2 sup
|μ|+j+|γ|≤2m+2
supθ,s
(1 + |s|+ |x′′|)2m+2|(∂μθ ∂
js∂
γx′′ϕ)(θ, s;x
′′)|.
Hence, we can differentiate under the sign of integration in ψm,γ(x′, x′′) and get
|(∂vx′ψm,γ)(x
′, x′′)|(5.30)
≤ cp sup|μ|+j+|γ|≤2m+2
supθ,s
(1 + |s|+ |x′′|)2m+2|(∂μθ ∂
js∂
γx′′ϕ)(θ, s;x
′′)|.

308 B. RUBIN
Thus, (5.25), (5.26), and (5.30) yield
sup|p|+|γ|≤m
sup|x′|>1
supx′′
(1 + |x′|+ |x′′|)m |∂px′∂
γx′′ψ(x
′, x′′)|(5.31)
≤ cm sup|p|+|γ|≤m
sup|x′|>1
supx′′
(1 + |x′|+ |x′′|)m∑
u+v=p
|x′|−m−|u|
× sup|μ|+j+|γ|≤2m+2
supθ,s
(1 + |s|+ |x′′|)2m+2|(∂μθ ∂
js∂
γx′′ϕ)(θ, s;x
′′)|.
Since for |x′| > 1,
1 + |x′|+ |x′′||x′| = 1 +
1 + |x′′||x′| < 2 + |x′′|,
then the expression in (5.31) does not exceed
Cm sup|μ|+j+|γ|≤3m+2
supθ,s,x′′
(1 + |s|+ |x′′|)3m+2 |(∂μθ ∂
js∂
γx′′ϕ)(θ, s;x
′′)|,
which is Cm ||ϕ||3m+2. This completes the proof of Proposition 5.10. �
5.3.1. The end of the proof of Theorem 5.5. In view of Proposition 5.9, itremains to prove that any ϕ ∈ SH(Zn,k) is uniquely represented as ϕ = Rkffor some f ∈ S(Rn) and the map ϕ → f is continuous in the topology of thecorresponding Schwartz spaces. In the following, dealing with a function of x =(x′, x′′) on Rn = Rk+1 × Rn−k−1, we denote by F1[·](y′) and F2[·](y′′) the Fouriertransform of this function in the first and the second variable, respectively. Thecorresponding n-dimensional Fourier transform will be denoted by Fn[·](y), y =(y′, y′′).
If ϕ ∈ SH(Zn,k), then the function ψ(y′, x′′) = [ϕ(y′/|y′|, ·;x′′)]∧(|y′|) belongsto S(Rk+1 × Rn−k−1) = S(Rn); see Proposition 5.10. We define a new function
ψ1(y) ≡ ψ1(y′, y′′) = F2[ψ(y
′, ·)](y′′).
Putting y′ = ηθ, η ∈ R, θ ∈ Sk, according to (5.10) and (5.3), we have
(5.32) F−12 [ψ1(ηθ, ·)](x′′) = ψ(ηθ, x′′) = [ϕ(θ, ·;x′′)]∧(η).
Now, let f ∈ S(Rn) be the inverse n-dimensional Fourier transform of ψ1,i.e.,f = F−1
n ψ1 = F−11 F−1
2 ψ1. Then by (2.4) and the Projection-Slice Theorem,
[(Rkf)(θ, ·;x′′)]∧(η) = [(Rfx′′)(θ, ·)]∧(η) = [f(·;x′′)]∧(ηθ)
= [(F−11 F−1
2 ψ1)(·;x′′)]∧(ηθ)
= [F−12 [ψ1(ηθ, ·)](x′′) (use (5.32))
= [ϕ(θ, ·;x′′)]∧(η).
It follows that Rkf = ϕ. Moreover, the map ϕ → f is continuous thanks to thecontinuity of the mappings
ϕ −→ ψ −→ ψ1 −→ F−1n ψ1 = f
in the corresponding Schwartz spaces.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 309
6. Open Problems
6.1. The Dual Transform. Let Πn,k be a fixed n-dimensional complex ofk-planes in Rn, which foliates the ambient space. We define the dual transform(R∗
kϕ)(x), x ∈ Rn, of a function ϕ(ξ), ξ ∈ Πn,k, so that
(6.1)
∫Πn,k
(Rkf)(ξ)ϕ(ξ) dξ =
∫Rn
f(x)(R∗kϕ)(x) dx
for the suitable measure dξ and sufficiently good f and ϕ.
Question. How does one define Πn,k so that ϕ could be uniquely reconstructed
from R∗kϕ?
A similar question can be formulated for the elliptic and hyperbolic space.
6.2. The Lower Dimensional Busemann-Petty Problem. The lowerdimensional Busemann-Petty problem asks whether n-dimensional origin-symmetricconvex bodies, having smaller k-dimensional central sections, necessarily havesmaller volumes.
The totally geodesic Radon transforms on the unit sphere Sn−1 in Rn are thebasic tool in the study of this problem. For k = 1, an affirmative answer is obvious.For 3 < k ≤ n − 1, a negative answer was given by Bourgain and Zhang [6]. Theproof from [6] was corrected by Rubin and Zhang [60]. An alternative proof wasgiven by Koldobsky [37]. For k = n− 1, the problem was posed by Busemann andPetty [8] in 1956. The latter has a long history, and the answer is affirmative if andonly if n ≤ 4; see [15,38], and references therein.
If n ≥ 5, then, to the best of our knowledge, for k = 2 and k = 3, the problemis still open, except for the case when the body with smaller sections is a bodyof revolution. In this particular case, the answer is affirmative. A more generalsubclass of origin-symmetric convex bodies which are invariant under rotationspreserving mutually orthogonal coordinate subspaces R� and Rn−� was studied in[57]. It turned out that in this case the answer depends on �. Moreover, in the caseof the affirmative answer, the problem in [57] is overdetermined in the sense thatwe do not need to compare ALL central sections; see Comment 10 in [57, p. 216].
The last fact suggests the following problem:
Problem. Let 2 ≤ k < n−1, n ≥ 5. Given an (n−1)-dimensional complex Xin the Grassmann manifold of k-dimensional linear subspaces of Rn, investigate therestricted lower dimensional Busemann-Petty problem, in which the central sectionsare performed by the elements of X only.
One can take, e.g., the complex described in Section 3 with obvious notationalchanges.
The following remark, connecting this problem with the one in the previoussection, might be helpful: The positive part of the solution of the usual Busemann-Petty problem (k = n − 1) heavily relies on the injectivity of the dual totallygeodesic Radon transform on the sphere. This transform is non-injective whenk < n− 1. It is hoped that introducing a new concept of the duality with respectto the afore-mentioned (n − 1)-dimensional complex will make the correspondingdual transform injective and bring new light to the problem.

310 B. RUBIN
References
[1] C. A. Berenstein and E. Casadio Tarabusi, Inversion formulas for the k-dimensionalRadon transform in real hyperbolic spaces, Duke Math. J. 62 (1991), no. 3, 613–631, DOI10.1215/S0012-7094-91-06227-7. MR1104811 (93b:53056)
[2] C. A. Berenstein and E. Casadio Tarabusi, On the Radon and Riesz transforms in real hyper-bolic spaces, Geometric analysis (Philadelphia, PA, 1991), Contemp. Math., vol. 140, Amer.Math. Soc., Providence, RI, 1992, pp. 1–21, DOI 10.1090/conm/140/1197583. MR1197583(93j:44003)
[3] C. A. Berenstein and E. Casadio Tarabusi, Integral geometry in hyperbolic spaces andelectrical impedance tomography, SIAM J. Appl. Math. 56 (1996), no. 3, 755–764, DOI10.1137/S0036139994277348. MR1389752 (97d:53073)
[4] C. A. Berenstein and B. Rubin, Radon transform of Lp-functions on the Lobachevskyspace and hyperbolic wavelet transforms, Forum Math. 11 (1999), no. 5, 567–590, DOI10.1515/form.1999.014. MR1705903 (2000e:44001)
[5] C. A. Berenstein and B. Rubin, Totally geodesic Radon transform of Lp-functions on real
hyperbolic space, Fourier analysis and convexity, Appl. Numer. Harmon. Anal., BirkhauserBoston, Boston, MA, 2004, pp. 37–58. MR2087237 (2005f:44003)
[6] J. Bourgain and G. Zhang, On a generalization of the Busemann-Petty problem, Convexgeometric analysis (Berkeley, CA, 1996), Math. Sci. Res. Inst. Publ., vol. 34, CambridgeUniv. Press, Cambridge, 1999, pp. 65–76, DOI 10.2977/prims/1195144828. MR1665578(99m:52011)
[7] L. Brandolini, A. Greenleaf, and G. Travaglini, Lp-Lp′ estimates for overdetermined Radontransforms, Trans. Amer. Math. Soc. 359 (2007), no. 6, 2559–2575 (electronic), DOI10.1090/S0002-9947-07-03953-0. MR2286045 (2008b:42033)
[8] H. Busemann and C. M. Petty, Problems on convex bodies, Math. Scand. 4 (1956), 88–94.
MR0084791 (18,922b)[9] C. Carton-Lebrun, Smoothness properties of certain integrals and the range of the Radon
transform, Bull. Soc. Roy. Sci. Liege 53 (1984), no. 5, 257–262. MR770090 (86h:44003)[10] M. Christ, Estimates for the k-plane transform, Indiana Univ. Math. J. 33 (1984), no. 6,
891–910, DOI 10.1512/iumj.1984.33.33048. MR763948 (86k:44004)[11] M. Christ, Convolution, curvature, and combinatorics: a case study, Internat. Math. Res.
Notices 19 (1998), 1033–1048, DOI 10.1155/S1073792898000610. MR1654767 (2000a:42026)[12] S. W. Drury, A survey of k-plane transform estimates, Commutative harmonic analysis
(Canton, NY, 1987), Contemp. Math., vol. 91, Amer. Math. Soc., Providence, RI, 1989,pp. 43–55, DOI 10.1090/conm/091/1002587. MR1002587 (92b:44002)
[13] A. Erdelyi (Editor), Higher Transcendental Functions, Vol. I, McGraw-Hill, New York, 1953.[14] M. B. Erdogan and R. Oberlin, Estimates for the X-ray transform restricted to 2-
manifolds, Rev. Mat. Iberoam. 26 (2010), no. 1, 91–114, DOI 10.4171/RMI/595. MR2666309(2011d:42040)
[15] R. J. Gardner, Geometric tomography, 2nd ed., Encyclopedia of Mathematics and its Appli-cations, vol. 58, Cambridge University Press, Cambridge, 2006. MR2251886 (2007i:52010)
[16] I. M. Gel′fand, Integral geometry and its relation to the theory of representations. (Russian),Russian Math. Surveys 15 (1960), no. 2, 143–151. MR0144358 (26 #1903)
[17] I. M. Gel′fand and S. G. Gindikin, Nonlocal inversion formulas in real integral geometry(Russian), Funkcional. Anal. i Prilozen. 11 (1977), no. 3, 12–19, 96. MR0458062 (56 #16265)
[18] I. M. Gel′fand, S. G. Gindikin, and M. I. Graev, Integral geometry in affine and projectivespaces (Russian), Current problems in mathematics, Vol. 16 (Russian), Akad. Nauk SSSR,Vsesoyuz. Inst. Nauchn. i Tekhn. Informatsii, Moscow, 1980, pp. 53–226, 228. MR611160
(82m:43017)[19] I. M. Gelfand, S. G. Gindikin, and M. I. Graev, Selected topics in integral geometry, Trans-
lations of Mathematical Monographs, vol. 220, American Mathematical Society, Providence,RI, 2003. Translated from the 2000 Russian original by A. Shtern. MR2000133 (2004f:53092)
[20] I. M. Gel′fand and M. I. Graev, Integral transformations connected with line complexes in acomplex affine space (Russian), Dokl. Akad. Nauk SSSR 138 (1961), 1266–1269. MR0137089(25 #545)
[21] I. M. Gel′fand and M. I. Graev, Complexes of straight lines in the space Cn, Functional Anal.Appl. 2 (1968), 219–229.

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 311
[22] I. M. Gel′fand and M. I. Graev, The Crofton function and inversion formulas in realintegral geometry (Russian), Funktsional. Anal. i Prilozhen. 25 (1991), no. 1, 1–6, DOI10.1007/BF01090671; English transl., Funct. Anal. Appl. 25 (1991), no. 1, 1–5. MR1113117(93e:53083)
[23] I. M. Gel′fand, M. I. Graev, and R. Rosu, The problem of integral geometry for p-dimensionalplanes in real projective space (the nonlocal variant), Operator algebras and group represen-tations, Vol. I (Neptun, 1980), Monogr. Stud. Math., vol. 17, Pitman, Boston, MA, 1984,
pp. 192–207. MR731774 (85g:53082)[24] I. M. Gel′fand, M. I. Graev, and Z. Ja. Sapiro, Integral geometry on manifolds of k-
dimensional planes (Russian), Dokl. Akad. Nauk SSSR 168 (1966), 1236–1238. MR0198407(33 #6565)
[25] I. M. Gel′fand, M. I. Graev, and Z. Ja. Sapiro, Integral geometry on k-dimensional planes(Russian), Funkcional. Anal. i Prilozen 1 (1967), 15–31. MR0212754 (35 #3620)
[26] I. M. Gel′fand, M. I. Graev, and N. Ya. Vilenkin, Generalized functions. Vol. 5: Integral ge-ometry and representation theory, Translated from the Russian by Eugene Saletan, Academic
Press, New York-London, 1966. MR0207913 (34 #7726)[27] A. B. Goncharov, Integral geometry on families of k-dimensional submanifolds (Russian),
Funktsional. Anal. i Prilozhen. 23 (1989), no. 3, 11–23, 96, DOI 10.1007/BF01079523; Englishtransl., Funct. Anal. Appl. 23 (1989), no. 3, 178–189 (1990). MR1026984 (91e:53071)
[28] F. B. Gonzalez, On the range of the Radon d-plane transform and its dual, Trans. Amer.Math. Soc. 327 (1991), no. 2, 601–619, DOI 10.2307/2001816. MR1025754 (92a:44002)
[29] F. B. Gonzalez, Notes on integral geometry and harmonic analysis, COE Lecture Note,vol. 24, Kyushu University, Faculty of Mathematics, Fukuoka, 2010. Math-for-Industry Lec-ture Note Series. MR2606155 (2011e:43013)
[30] A. Greenleaf and G. Uhlmann, Nonlocal inversion formulas for the X-ray transform, DukeMath. J. 58 (1989), no. 1, 205–240, DOI 10.1215/S0012-7094-89-05811-0. MR1016420(91b:58251)
[31] E. L. Grinberg, On images of Radon transforms, Duke Math. J. 52 (1985), no. 4, 939–972,DOI 10.1215/S0012-7094-85-05251-2. MR816395 (87e:22020)
[32] S. Helgason, Integral geometry and Radon transforms, Springer, New York, 2011. MR2743116(2011m:53144)
[33] F. John, The ultrahyperbolic differential equation with four independent variables, DukeMath. J. 4 (1938), no. 2, 300–322, DOI 10.1215/S0012-7094-38-00423-5. MR1546052
[34] A. I. Katsevich, Range of the Radon transform on functions which do not decay fast atinfinity, SIAM J. Math. Anal. 28 (1997), no. 4, 852–866, DOI 10.1137/S0036141095289518.MR1453309 (98g:44001)
[35] A. Katsevich, Range theorems for the Radon transform and its dual, Radon transforms and
tomography (South Hadley, MA, 2000), Contemp. Math., vol. 278, Amer. Math. Soc., Prov-idence, RI, 2001, pp. 167–191, DOI 10.1090/conm/278/04604. MR1851487 (2002f:44004)
[36] A. A. Kirillov, A problem of I. M. Gel′fand, Soviet Math. Dokl. 2 (1961), 268–269.MR0117513 (22 #8292)
[37] A. Koldobsky, A functional analytic approach to intersection bodies, Geom. Funct. Anal. 10(2000), no. 6, 1507–1526, DOI 10.1007/PL00001659. MR1810751 (2001m:52007)
[38] A. Koldobsky, Fourier analysis in convex geometry, Mathematical Surveys and Monographs,vol. 116, American Mathematical Society, Providence, RI, 2005. MR2132704 (2006a:42007)
[39] A. Kurusa, A characterization of the Radon transform’s range by a system of PDEs, J. Math.Anal. Appl. 161 (1991), no. 1, 218–226, DOI 10.1016/0022-247X(91)90371-6. MR1127559
(92k:44002)[40] D. Ludwig, The Radon transform on euclidean space, Comm. Pure Appl. Math. 19 (1966),
49–81. MR0190652 (32 #8064)[41] W. R. Madych and D. C. Solmon, A range theorem for the Radon transform, Proc. Amer.
Math. Soc. 104 (1988), no. 1, 79–85, DOI 10.2307/2047465. MR958047 (90i:44003)[42] K. Maıus, The structure of admissible complexes of lines in CPn (Russian), Trudy Moskov.
Mat. Obshch. 39 (1979), 181–211, 236. MR544946 (81h:53011)[43] D. M. Oberlin, An estimate for a restricted X-ray transform, Canad. Math. Bull. 43 (2000),
no. 4, 472–476, DOI 10.4153/CMB-2000-055-8. MR1793949 (2001k:44004)[44] D. M. Oberlin, Restricted Radon transforms and unions of hyperplanes, Rev. Mat. Iberoam.
22 (2006), no. 3, 977–992, DOI 10.4171/RMI/481. MR2320409 (2008g:28023)

312 B. RUBIN
[45] D. M. Oberlin, Restricted Radon transforms and projections of planar sets, Canad. Math.Bull. 55 (2012), no. 4, 815–820, DOI 10.4153/CMB-2011-064-6. MR2994685
[46] D. M. Oberlin and E. M. Stein, Mapping properties of the Radon transform, Indiana Univ.Math. J. 31 (1982), no. 5, 641–650, DOI 10.1512/iumj.1982.31.31046. MR667786 (84a:44002)
[47] V. Palamodov, Reconstructive integral geometry, Monographs in Mathematics, vol. 98,Birkhauser Verlag, Basel, 2004. MR2091001 (2005i:53094)
[48] E. E. Petrov, Cavalieri conditions for a k-dimensional Radon transform (Russian), Mat.
Zametki 50 (1991), no. 5, 61–68, 160, DOI 10.1007/BF01157700; English transl., Math. Notes50 (1991), no. 5-6, 1135–1141 (1992). MR1155557 (92k:44003)
[49] E. E. Petrov, Moment conditions for the k-dimensional Radon transformation (Russian),Izv. Vyssh. Uchebn. Zaved. Mat. 4 (1992), 49–53. MR1212652 (94e:44004)
[50] E. E. Petrov, The Cavalieri condition for integrals over k-dimensional planes, k < n − 1(Russian, with Russian summary), Algebra i Analiz 5 (1993), no. 4, 191–205; English transl.,St. Petersburg Math. J. 5 (1994), no. 4, 827–839. MR1246426 (95d:53079)
[51] F. Richter, On the k-dimensional Radon-transform of rapidly decreasing functions, Differ-ential geometry, Penıscola 1985, Lecture Notes in Math., vol. 1209, Springer, Berlin, 1986,pp. 243–258, DOI 10.1007/BFb0076636. MR863761 (88a:53071)
[52] B. Rubin, Inversion of fractional integrals related to the spherical Radon transform, J. Funct.Anal. 157 (1998), no. 2, 470–487, DOI 10.1006/jfan.1998.3268. MR1638340 (2000a:42019)
[53] B. Rubin, Helgason-Marchaud inversion formulas for Radon transforms, Proc. Amer.Math. Soc. 130 (2002), no. 10, 3017–3023 (electronic), DOI 10.1090/S0002-9939-02-06554-1.MR1908925 (2003f:44003)
[54] B. Rubin, Inversion formulas for the spherical Radon transform and the generalized cosinetransform, Adv. in Appl. Math. 29 (2002), no. 3, 471–497, DOI 10.1016/S0196-8858(02)00028-3. MR1942635 (2004c:44006)
[55] B. Rubin, Radon, cosine and sine transforms on real hyperbolic space, Adv. Math. 170(2002), no. 2, 206–223, DOI 10.1006/aima.2002.2074. MR1932329 (2004b:43007)
[56] B. Rubin, Reconstruction of functions from their integrals over k-planes, Israel J. Math. 141(2004), 93–117, DOI 10.1007/BF02772213. MR2063027 (2005b:44004)
[57] B. Rubin, The lower dimensional Busemann-Petty problem for bodies with the general-
ized axial symmetry, Israel J. Math. 173 (2009), 213–233, DOI 10.1007/s11856-009-0089-7.MR2570666 (2010m:52019)
[58] B. Rubin, On the Funk-Radon-Helgason inversion method in integral geometry, Geomet-ric analysis, mathematical relativity, and nonlinear partial differential equations, Con-temp. Math., vol. 599, Amer. Math. Soc., Providence, RI, 2013, pp. 175–198, DOI10.1090/conm/599/11908. MR3202479
[59] B. Rubin, Weighted norm inequalities for k-plane transforms, Proc. Amer. Math. Soc. 142(2014), no. 10, 3455–3467, DOI 10.1090/S0002-9939-2014-11987-3. MR3238421
[60] B. Rubin and G. Zhang, Generalizations of the Busemann-Petty problem for sections ofconvex bodies, J. Funct. Anal. 213 (2004), no. 2, 473–501, DOI 10.1016/j.jfa.2003.10.008.MR2078635 (2005c:52005)
[61] D. C. Solmon, A note on k-plane integral transforms, J. Math. Anal. Appl. 71 (1979), no. 2,351–358, DOI 10.1016/0022-247X(79)90196-3. MR548770 (80m:44010)
[62] D. C. Solmon, Asymptotic formulas for the dual Radon transform and applications, Math.Z. 195 (1987), no. 3, 321–343, DOI 10.1007/BF01161760. MR895305 (88i:44006)
[63] R. S. Strichartz, Lp estimates for Radon transforms in Euclidean and non-Euclidean spaces,Duke Math. J. 48 (1981), no. 4, 699–727, DOI 10.1215/S0012-7094-81-04839-0. MR782573(86k:43008)

OVERDETERMINED TRANSFORMS IN INTEGRAL GEOMETRY 313
[64] N. Ja. Vilenkin and A. U. Klimyk, Representation of Lie groups and special functions. Vol.2, Mathematics and its Applications (Soviet Series), vol. 74, Kluwer Academic PublishersGroup, Dordrecht, 1993. Class I representations, special functions, and integral transforms;Translated from the Russian by V. A. Groza and A. A. Groza. MR1220225 (94m:22001)
Department of Mathematics, Louisiana State University, Baton Rouge, Louisiana
70803
E-mail address: [email protected]


Published Titles in This Subseries
Israel Mathematical Conference Proceedings (IMCP) is a publication, part of the ContemporaryMathematics Series, devoted to the proceedings of conferences, symposia and seminars.Collections of papers focusing on a certain subject will also be published. Prospective volumesmay be submitted to any member of the editorial board. Each volume has an editor (or editors)responsible for its preparation. In order to ensure inexpensive and timely distribution, authorsare requested to submit to the Editor of the volume an electronic TEX file of their manuscript inAMS-LATEX, using the Contemporary Mathematics style file which can be downloaded athttp://www.ams.org/tex/author-info.html. For further information, contact the ManagingEditor, IMCP, Department of Mathematics, Bar-Ilan University, Ramat-Gan 52900, Israel;e-mail: [email protected].
653 Mark L. Agranovsky, Matania Ben-Artzi, Greg Galloway, Lavi Karp, DmitryKhavinson, Simeon Reich, Gilbert Weinstein, and Lawrence Zalcman, Editors,Complex Analysis and Dynamical Systems VI: Part 1: PDE, Differential Geometry, RadonTransform, 2015
636 Simeon Reich and Alexander J. Zaslavski, Editors, Infinite Products of Operatorsand Their Applications, 2015
619 Gershon Wolansky and Alexander J. Zaslavski, Editors, Variational and OptimalControl Problems on Unbounded Domains, 2014
591 Mark L. Agranovsky, Matania Ben-Artzi, Greg Galloway, Lavi Karp, VladimirMaz’ya, Simeon Reich, David Shoikhet, Gilbert Weinstein, and LawrenceZalcman, Editors, Complex Analysis and Dynamical Systems V, 2013
568 Simeon Reich and Alexander J. Zaslavski, Editors, Optimization Theory andRelated Topics, 2012
554 Mark Agranovsky, Matania Ben-Artzi, Greg Galloway, Lavi Karp, SimeonReich, David Shoikhet, Gilbert Weinstein, and Lawrence Zalcman, Editors,Complex Analysis and Dynamical Systems IV: Part 2. General Relativity, Geometry, andPDE, 2011
553 Mark Agranovsky, Matania Ben-Artzi, Greg Galloway, Lavi Karp, SimeonReich, David Shoikhet, Gilbert Weinstein, and Lawrence Zalcman, Editors,Complex Analysis and Dynamical Systems IV: Part 1. Function Theory and Optimization,2011
514 Arie Leizarowitz, Boris S. Mordukhovich, Itai Shafrir, and Alexander J.Zaslavski, Editors, Nonlinear Analysis and Optimization II, 2010
513 Arie Leizarowitz, Boris S. Mordukhovich, Itai Shafrir, and Alexander J.Zaslavski, Editors, Nonlinear Analysis and Optimization I, 2010
489 David Ginzburg, Erez Lapid, and David Soudry, Editors, Automorphic Forms andL-functions II, 2009
488 David Ginzburg, Erez Lapid, and David Soudry, Editors, Automorphic Forms andL-functions I, 2009
455 Mark Agranovsky, Daoud Bshouty, Lavi Karp, Simeon Reich, David Shoikhet,and Lawrence Zalcman, Editors, Complex Analysis and Dynamical Systems III, 2008
433 Pavel Etingof, Shlomo Gelaki, and Steven Shnider, Editors, Quantum Groups,2007
404 Alexander Borichev, Hakan Hedenmalm, and Kehe Zhu, Editors, BergmanSpaces and Related Topics in Complex Analysis, 2006
402 Zvi Arad, Mariagrazia Bianchi, Wolfgang Herfort, Patrizia Longobardi,Mercede Maj, and Carlo Scoppola, Editors, Ischia Group Theory 2004, 2006
387 Michael Entov, Yehuda Pinchover, and Michah Sageev, Editors, Geometry,Spectral Theory, Groups, and Dynamics, 2005
382 Mark Agranovsky, Lavi Karp, and David Shoikhet, Editors, Complex Analysisand Dynamical Systems II, 2005
364 Mark Agranovsky, Lavi Karp, David Shoikhet, and Lawrence Zalcman,Editors, Complex Analysis and Dynamical Systems, 2004


This volume contains the proceedings of the Sixth International Conference on ComplexAnalysis and Dynamical Systems, held from May 19–24, 2013, in Nahariya, Israel, inhonor of David Shoikhet’s sixtieth birthday.
The papers in this volume range over a wide variety of topics in Partial DifferentialEquations, Differential Geometry, and the Radon Transform. Taken together, the articlescollected here provide the reader with a panorama of activity in partial differential equationsand general relativity, drawn by a number of leading figures in the field. They testify to thecontinued vitality of the interplay between classical and modern analysis.
The companion volume (Contemporary Mathematics, Volume 667) is devoted to com-plex analysis, quasiconformal mappings, and complex dynamics.
ISBN978-1-4704-1653-9
9 781470 416539
CONM/653
CO
NM
653C
om
plex
Ana
lysisa
ndD
ynam
ica
lSystem
sV
I•
Ag
ranovsky
eta
l.,Edito
rsA
MS/BIU
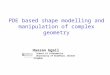















![Indoor Air Quality (IAQ) - Radon · Radon, please call your State Radon Contact or the National Radon Information Line at: 1-800-SOS-RADON [1 (800) 767-7236], or (if you have tested](https://img.pdfslide.us/doc/110x75/5fb2e8f6d1a5cc5c8d33d275/indoor-air-quality-iaq-radon-radon-please-call-your-state-radon-contact-or.jpg)