Embed Size (px)
Citation preview

IN DEGREE PROJECT ELECTRICAL ENGINEERING,SECOND CYCLE, 30 CREDITS
, STOCKHOLM SWEDEN 2019
Comparison of Consumer-Grade MEMS IMUs in UBI Context
TOLGA VAROL
KTH ROYAL INSTITUTE OF TECHNOLOGYSCHOOL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE

Comparison of Consumer- Grade MEMS IMUs in UBI Context
TOLGA VAROL [email protected]
EIT Digital, Embedded Systems Date: January 8, 2019 Supervisor and Examiner: Peter Händel KTH Royal Institute of Technology


i
Abstract
Road traffic has many negative socioeconomic impacts on society. A key problem is the risk of
deadly accidents. The risk, to a high extend is reduced in developed societies. However, the
accidents are still ubiquitous. There are various approaches for reducing accidents such as
improving the infrastructure, educating better drivers and incentivizing drivers for driving safe.
For the latter, the way is to analyse driving behaviour and this is possible using sensors such as
inertial measurement units (IMU) without hindering privacy. Insurance companies approach this
issue via Usage Based Insurance (UBI) products, where the premium is dynamically calculated by
evaluating the driver based on measuring vehicle dynamics and other contextual data. Due to
utilization of devices that use different IMUs, generalization of measured data is an issue for
correct evaluation and fairness.
The thesis deals with providing tools for filling the evaluation gap of IMUs for this purpose. The
study began with a survey involving IMUs in the market. Considering technical and economic
aspects, the most suitable ones were selected for evaluation. A modular system called quad-IMU
(QIMU) was designed and developed. A selected IMU (BMI160) was incorporated into a QIMU
and compared to two widely used IMUs in two scenarios; harsh breaking and static measurement
using raw digital linear acceleration measurements. Root mean square errors (RMSE) showed that
the BMI160 outperformed the others by approximately one and two orders of magnitude,
respectively. The QIMU showed to be a promising framework that needs to be explored further
for evaluating IMUs in-house in a rapid, low-cost and reliable manner.
Keywords IMU, UBI, IMU array, multi-IMU, BMI160

ii
Sammanfattning
Vägtrafiken har många negativa socioekonomiska effekter på samhället. Ett viktigt problem är
risken för dödliga olyckor. Risken, i stor utsträckning, minskar i utvecklade samhällen. Olyckorna
är dock fortfarande allestädes närvarande. Det finns olika metoder för att minska olyckor som att
förbättra infrastrukturen, utbilda bättre förare och incitament för förare att köra säkert. Det
sistnämnda kan göras genom att analysera körbeteendet, och detta är möjligt med hjälp av sensorer
som tröghetssensorer (IMU) utan att hindra integriteten. Försäkringsbolag närmar sig denna fråga
via användningsbaserade försäkringar (UBI) -produkter, där premien dynamiskt beräknas genom
att utvärdera föraren baserat på mätning av fordonsdynamik och annan kontextuell data. På grund
av användningen av enheter som använder olika IMU-enheter är generalisering av uppmätta data
en öppen fråga för korrekt utvärdering och rättvisa.
Avhandlingen handlar om att tillhandahålla verktyg för att fylla utvärderingsgapet för IMUer för
detta ändamål. Studien började med en undersökning med IMUer på marknaden. Med tanke på
tekniska och ekonomiska aspekter valdes de mest lämpliga för utvärdering. Ett modulärt system
kallat quad-IMU (QIMU) designades och utvecklades. En vald IMU (BMI160) inkorporerades i
en QIMU och jämfördes med två ofta använda IMUer i två scenarier; hård inbromsning och statisk
mätning med hjälp av raka digitala linjära accelerationsmätningar. Det genomsnittliga
medelkvadratfelet (RMSE) visade att BMI160 överträffade de andra med ungefär en och två
storleksordningar. QIMU visade sig vara en lovande ram som behöver undersökas mer för att
utvärdera IMUer internt på ett snabbt, billigt och pålitligt sätt.
Keywords IMU, UBI, IMU array, multi-IMU, BMI160

iii
Acknowledgments
I dedicate this thesis work to family; Maya, Tuncay and Umit.
Firstly, I would like to thank to my supervisor and examiner Professor Peter Händel for his guidance and engagement. His suggestions and publications were primary sources of information that gave direction to this study. The hardware would not have been possible to assemble if not for Laurent Mattle and Jean-Christophe Lecun, thanks for providing the facilities at I.E.T.F. Rennes and the stencil! Special thanks to Roman Prytkov for undertaking much of my responsibilities with DriveTrust over the last two months. I would also like to Levente Pap Zsolt, for finding me the opponent and for his inputs.
Last but not least, I would like to thank to EIT and EIT Digital Master School for granting me a scholarship over the period of my studies at TU Berlin and KTH. The studies have been fruitful and convenient thanks to many.
Bittersweet, this final paragraph marks the end of an adventure that begun in late 2016. I am grateful for many moments, to many inspiring people; friends, teachers and others.


v
List of Figures
Figure 1: An IMU device.
Figure 2: An illustration representing a tuning fork.
Figure 3: A sub-structure of the comb-drive.
Figure 4: MATLAB plots using noise density information from datasheets.
Figure 5: Bar graph representation of filtered IMUs.
Figure 6: Illustration representing the hardware system architecture.
Figure 7: Physical layout of the LSM6DSx PCB as seen in CircuitMaker PCB view.
Figure 8: A QIMU that can be stacked on other QIMUs to extend the SPI network.
Figure 9: Stencil that is made for BMI160 IMU.
Figure 10: Solder paste can be seen on surfaces of the pads.
Figure 11: From top to bottom, QIMU with IMUs.
Figure 12: Data acquisition setup inside the vehicle.
Figure 13: A 10 second excerpt from experiment on harsh breaking.
Figure 14: A 10 second excerpt from experiment on harsh breaking.
Figure 15: Sum of all axes (x, y and z) for both first BMI160 and LSM6DSL.
Figure 16: Static measurement of x-axis over 20 seconds at 100 Hz.
Figure 17: Static measurement of y-axis over 20 seconds at 100 Hz.
Figure 18: Static measurement of z-axis over 20 seconds at 100 Hz.
Figure 19: Second BMI160 does not have any affect from axes except z-axis.
List of Tables
Table 1: Different IMU grades with regards to in-run bias stability characteristics.
Table 2: IMU modules that are left after filtering with selected metrics.
Table 3: Selected IMUs with bandwidth information.
Table 4: An excerpt from spreadsheet containing Bill of Materials (BoM).
Table 5: RMSE for different IMUs on different axes.

vi
List of Acronyms and Abbreviations
ADC Analog to Digital Converter
ARW Angular Random Walk
BGA Ball Grid Array
BoM Bill of Materials
CAD Computer Aided Design
CG Consumer Grade
CNC Computer Numerical Control
COTS Commercial Off-the-Shelf
DMP Digital Motion Processor
EOL End of life
EU European Union
FIFO First-in first-out
FOG Fibre Optic Gyroscope
FSR Full Scale Range
GNSS Global Navigation Satellite System
GPS Global Positioning System
I2C Inter-integrated Circuit
I.E.T.R. Institute of Electronics and Telecommunications of Rennes
IMU Inertial Measurement Unit
LGA Land Grid Array
LIDAR Light Detection and Ranging
LUT Look-up Table
LSB Least Significant Bit
MEMS Microelectromechanical Systems
MIMU Multi-IMU Array
MOQ Minimum Order Quantity
NG Navigational Grade
OBD On-Board Diagnostics
ODR Output Data Rate
PAYD Pay as You Drive

vii
PCB Printed Circuit Board
PCBA Printed Circuit Board Assembly
PHYD Pay How You Drive
QIMU Quad-IMU
QFN Quad Flat no-Leads
RF Radio Frequency
RLG Ring Laser Gyroscope
RMS Root Mean Square
RMSE Root Mean Square Error
R&D Research and Development
SMD Surface Mount Device
SPI Serial Peripheral Interface
TG Tactical Grade
TH Through Hole
UBI Usage Based Insurance
VRW Velocity Random Walk
ZRO Zero Rate Output

viii
Table of Contents
ABSTRACT I
SAMMANFATTNING II
ACKNOWLEDGMENTS III
LIST OF FIGURES V
LIST OF TABLES V
LIST OF ACRONYMS AND ABBREVIATIONS VI
TABLE OF CONTENTS VIII
1 INTRODUCTION 1
1.1 Background 2
1.2 Motivation 2
1.3 Purpose 3
1.4 Goal 3
1.5 Method 3
1.6 Outline 4
2 LITERATURE REVIEW 4
3 THEORETICAL BACKGROUND 7
3.1 Inertial Measurement Unit 7 3.1.1 Grading of Inertial Measurement Units 8
3.2 Basic Principles of MEMS Gyroscopes 9 3.2.1 Working Principle 9 3.2.2 Key Characteristics 10

ix
3.3 Basic Principles of MEMS Accelerometers 12 3.3.1 Working Principle 12 3.3.2 Key Characteristics 14
3.4 Multi-IMU Arrays 15
3.5 Driving Behaviour Detection 16
4 METHODS 17
4.1 Survey on Low-Cost MEMS IMUs 17 4.1.1 Metrics 18 4.1.2 Selection of IMUs 19
4.2 Experiment 21 4.2.1 Experimental Setup 21 4.2.2 Data Acquisition Platforms 23 4.2.3 Hardware Design 24 4.2.4 Experiment Environment and Data Acquisition 30
5 RESULTS AND ANALYSIS 32
5.1 Survey 32
5.2 Experiment 32
6 DISCUSSION AND CONCLUSION 38
6.1 Limitations and Future Work 39
6.2 Ethics and Sustainability 40
REFERENCES 41
APPENDICES 45
APPENDIX A: SCHEMATICS 45
APPENDIX B: MATLAB SCRIPTS 46
APPENDIX C: EXCERPT FROM THE IMU SURVEY 48
APPENDIX D: BILL OF MATERIALS 50

1
1 Introduction
Transportation is a basic human need and a necessity to access other core needs. Although the degree of this need can to a high extent differ depending on the context, in many cases it is key for accessing basic needs which are controversially structured by Maslow in modern societies [1]. Today, transportation is essential for humans to access health care, food, water et cetera, and it will remain so until we have them locally sustainable.
A front-end of the transportation where interaction between the majorities of society is immense is road transportation, and a key enabler for road transportation is the automotive industry. As of 2017, within European Union (EU), there were more than 378 million actively used motorized vehicles, of which more than 323 million were passenger cars - excluding two or three-wheeled vehicles like motorcycles [2].
Solely in EU, in 2015 more than a million injury road accidents took place caused 25300 death, more than 1.4 million injuries of which roughly 130000 were serious and approximately 120 billion euros in socioeconomic damage [3]. Bad driving behaviour, combined with poor road quality, environmental conditions and other factors affects road safety negatively. Efforts on improving road safety through a variety of measures from different stakeholders are proven to show progress [4].
Usage-based insurance (UBI) or telematics insurance is one of these measures that came from the private sector. UBI is an umbrella term for a set of vehicle insurance products that differ from traditional products by the implemented methods of assigning risk. Traditionally, insurance premiums are defined based on historical data related to quasi-static factors (registration location, gender, age, the price of vehicle etc.). These factors and their inter-correlated relation to costs of insurance companies define the risk profiles. Risk profiles become applicable on premiums of policyholders depending on which profile they fit. Hence, two policyholders of the same risk group - no matter how they drive - end up having the same policy, until factors of the policyholder change either over time or by an event (e.g. an accident). Early work on elaborating on these risk profiles by bringing the evaluation and pricing to an individual level was described in insurance patents [5], [6]. The ideas were to equip a vehicle with sensors, processing capability, and connectivity in order to check journey durations. Then using this data for a pricing scheme on an individual level. This became the basis for UBI model called Pay-as-you-Drive (PAYD). Initial pilot runs began in the late 1990s [7]. Leveraging from the high correlation between accidents and amount of driven mileage, clear indicators of PAYD being a major incentive for driving less were found [8]. However these were not enough for promoting or adoption of this model by any of the major actors at that time, neither public, nor commercial. This was not only due to economic reasons, both public actors’ and insurance companies’ traditional reluctance for insurance also played a major
role. Since the late 1990s, developments in connectivity, electronics, materials, and algorithms
together enabled innovations to become affordable and spread into wide audiences. A major proof of concept, Nericell was a series of experiments that made use of the widespread availability of smartphones that are equipped with sensors. Studies were conducted for exploiting these already-available and affordable sensors. Utilization of sensors on smartphones for detection of traffic condition was a success and an eye opener for many actors [9]. Feasibility of evaluating the drivers individually, not based on how much they drive, but also how they drive became apparent and a UBI model called Pay-how-you-Drive (PHYD) became a trend. In a different manner to PAYD,

2
PHYD focus is extended to the policyholder's driving behaviour, with taking environmental factors into account. The adoption of UBI was still slow due to the lack of regulations, business models and incentives for major insurance companies that offer vehicle insurance products. As the technology and business models kept maturing, innovative insurance firms adopted UBI solutions and this became the first big step into mass-market adoption for this unorthodox proprietary insurance policy scheme. As a manifestation of herd mentality, further encouraged by success reports that are prepared by farsighted market research companies and analysts, previously negligent insurance companies started running UBI pilots and started offering UBI policies. Together with smartphone applications, on-board diagnostics devices (OBD dongles), black boxes, cigarette lighter dongles, wireless devices (beacons) et cetera found their places in the market. Moreover, automakers also responded to these developments by involving UBI compatible telematics solutions in their new makes. There are frequent collaboration news involving telecommunications, automotive and semiconductor industry players.
Indeed, it is attractive for innovative enterprises to take a share in this exponentially growing market. As well, it is utmost important for these initiatives to go-to market in a rapid fashion, due to forthcoming new generation vehicles where these aftermarket solutions will to a high extend become obsolete. For these enterprises, autonomous driving and electrification trends are major dynamic threats that need to be followed closely.
1.1 Background
This thesis deals with analysis, design and comparison of digital, consumer grade, commercial-off-the-shelf (COTS) and low minimum order quantity available (low-MOQ) microelectromechanical system (MEMS) inertial measurement units (IMU) with regards to driving behaviour analysis for the purpose of rapid prototyping and product development. Modules of interest are integrated 6-axis IMUs that consists of three orthogonally-mounted accelerometers and three orthogonally-mounted gyroscopes that measure the linear and angular acceleration rates in three dimensions. The focus is on quality of the raw data and hardware design aspects of these devices, rather than signal processing. Moreover, the thesis work is also instrumental for developing competencies for a startup called DriveTrust that develops technology solutions targeting UBI market, where the author is one of the founders [10].
1.2 Motivation
UBI schemes can be based on various analysis. Due to high correlation between accidents and aggressive driving behaviour, our focus is on driving behaviour analysis. In order to analyse a policyholder’s driving behaviour, initial step would be to collect driving data about her. Today’s
low-cost and size data collection methods and tools are all depending on electronic components, mainly due to practicality and cost considerations. Besides memory, power, connectivity and processing modules, the most common components that can be found in the devices that are used for monitoring driving behaviour are IMU and GNSS sensors. In this study we focus on sensors that comprise IMUs, namely accelerometers and gyroscopes; due to wider adoption, lesser privacy concerns, and lower cost compared to GNSS sensors. These sensors come with many different characteristics and functionalities. Innovations in sensor architectures and mass adoption of these sensors highly affect the precision, accuracy, reliability, and price of new generation sensors. Although data sheets provide sufficient and relevant information regarding particular sensors,

3
there is a continuous need for empirical analysis and guides considering new generation consumer-grade sensors, in the context of the target industries. Such research would act as a catalyst in research and development projects by guiding the system architects for making right component decisions for particular applications. This would mitigate the risk of having a poor design where requirements are not met and as well having an economically unfeasible design where unnecessary components are used.
Further, a key motivation behind our scope is to contribute on hastening of connected vehicle adoption in order to make transportation safer, more efficient and more eco-friendly.
1.3 Purpose Main purpose of this study is to accelerate prototyping and development speeds for
businesses and researchers within the context of aftermarket UBI solutions that are focused on driving behaviour analysis. Moreover, it is also an aim of this thesis to pinpoint the importance of reliability of the data that is collected, and as well empirically analysing MEMS IMUs in terms of reliability. This is especially important due to a crowded market place with non-standardized proprietary solutions. Finally, the outputs of the thesis are expected to be utilized in an R&D project for DriveTrust.
1.4 Goal Primary goal of this thesis is to analyse low-MOQ COTS available MEMS IMUs in order
to find the most suitable module for a non-safety-critical telematics application considering both technical and economic aspects.
A secondary goal is to contribute to open-source community with a modular IMU board design.
1.5 Method The thesis study began with a literature review on IMU evaluations and a background study
on IMU devices, particularly the MEMS devices that comprises accelerometers and gyroscopes. Characteristics and parameters of these sensors were studied. An in-depth online survey was conducted for low-MOQ available sensors from major manufacturers. Based on industrial standards and economical aspects, selection metrics for the sensors involved in survey were developed. Based on the survey and findings from the background study with target application in focus, most interesting sensors were selected and procured. A modular hardware was designed for data acquisition. An empirical study, as well as simulations were conducted utilizing the developed system and datasheets of the sensors. As for reference, a high-end smartphone was used due to pervasiveness of smartphone based driving behaviour analysis applications where the built-in sensors are highly utilized. Performance metrics, namely the most important characteristics were selected in-line with industry guidelines. Finally, the analysis were made on the findings. Results were compared in terms of relative performance for selection of most suitable sensor.

4
1.6 Outline Chapter 1 introduces the topic of the thesis, declares the goal, purpose and briefly the
methods that will be employed. Chapter 2 summarizes the literature and related work. Chapter 3 discusses the theory and delves into specifics of MEMS IMUs and related driving behaviour analysis methods. Chapter 4 describes the methodology that was followed for the experiment, including implementation of the experimental setup, quality assurance, testing and analysis. Chapter 5 presents the results and analysis on the results. Chapter 6 deals with conclusions, discussions and future work.
2 Literature Review IMU devices have a wide range of applications, as diverse as predictive maintenance for railways and spacecraft navigation. With the introduction of MEMS IMUs, use cases and application areas of these sensing units as well increased, mainly due to smaller form factors and reduced costs compared to devices that are equivalent in terms of performance. Attractiveness of these sensors for particular application areas, incentivized their comparison and evaluation. In this chapter, we introduce and summarize the previous research work on our research question.
Townsend published a gyroscope comparison document on an open-source forum that belongs to Adafruit Industries. His focus was mainly on manufacturer datasheets while the selection was made from the sensors that are available in Adafruit catalogue [11]. He analysed six different MEMS IMUs based on a single characteristic with the aim of showing ambiguities in the manufacturing datasheets, for all manufacturers on different specifications. He also showed that there is a large variation between performances among the main low-cost MEMS IMU makers’
products. Moreover, he found that, potentially unfavourable information that is useful for application developers are not available in public datasheets.
Mourcou et al evaluated three different smartphones of which two of the have the same 3-axis accelerometer while all of them having different 3-axis gyroscopes [12]. They reproduced predefined angular movements on pitch and roll axes. Later on they compared the smartphone performance against a clinically accepted IMU device and found that, despite minor differences between each other, built-in inertial sensors are comparable to clinically accepted IMU and more reliable than universal goniometers. Machaj et al [13] utilized a pre-calibrated module that consists of triaxial accelerometer, gyroscope, magnetometer and a temperature sensor in order to compare against two smartphones. Devices’ accelerometer measurements were used for compensating the
orientation drift. Performance metric was the error of estimated orientation angle against a fixture. The experiment results showed that performance of the IMU lied between two smartphones. Excluding comments on the high noise on better performing smartphone and as well performing the orientation test only around x-axis and extrapolating to an overall sensor performance result were key limitations.
Ban et al [14] analysed two MEMS IMUs for Inertial Navigation System (INS) applications. In their study they involved a low-end, and a high-end device, incentivized by low cost and small size of these sensors. Despite the low-end categorization of an IMU for INS application being high-end for automotive applications, they showed that the IMUs can aid INS

5
where GNSS signal is available at a rate of 1 Hz. This shows that dead reckoning to some extent is feasible. Further, they analysed the error propagation of both sensors and concluded as low-end device as well is suitable for INS applications where closed-loop GNSS aid with 1 Hz samples being available at all times.
Agostino et al [15] conducted comparative tests on four IMUs. All of the IMUs had MEMS accelerometers, three of the IMUs had MEMS gyroscopes and one IMU had a fibre optic rate gyroscope. Purpose of non-MEMS gyroscope was to compare performance against a high-precision solution. An important finding of this study was that; Allan-variance tests that were carried out showed the bias values given by manufacturers were overestimated and for lower cost sensors are involved, individual calibration might be needed. Moreover, authors have summarized levels for biases and drifts for accelerometers and gyroscopes for different technologies.
Gonzalez et al [16] developed a low-cost data acquisition system for automotive applications using low-MOQ available components. They used three of the most popular six-axis and three-axis sensors in their study. Selection rationale was the diversity of application areas of these sensors were used, as well as documentation availability. They developed a controlled test rig using a 4-channel analog data acquisition tool and a reference inertial measurement unit. They used the test rig for to exciting the sensors with simple harmonic motion with different low frequencies. Focus was on acceleration on all three axis. Besides data acquisition related findings, they found that while one of the low-cost accelerometers had less than 1.5% normalized RMSE, another one had nearly 10% for a particular frequency. Normalization was regarded to a higher-grade IMU that was used as the standard. This pinpointed the importance of definition of frequency range of interest, especially in the case of digital sensors. For example, in the case of tracking motion of a car, frequencies below 1 Hz or above 1000 Hz are irrelevant, while the difference on RMSE of any measurement at 100 Hz range would be a key metric for selecting a sensor.
Lu et al [17] analysed accuracy of an IMU sensor compared to a high-end motion analysis
software for gait analysis. Gait analysis is a study of human motion. As a result of their study, they happened to have the highest RMSE in yaw. The errors were reflected most on flexion/extension motion where RMSE corresponds to 12.99 degrees with 5% tolerance. In the study the authors stated that this was mainly an algorithmic issue. Relevance of this study does not lie in the accuracy analysis of the sensor, instead the IMU that was used in the experiment comprised of two MEMS sensors, an accelerometer and a gyroscope; ADXL345 from Analog Devices and ITG-3200 from Invensense. ADXL345 is although still being produced roughly 10 years old as of 2018 and ITG-3200 is not recommended any more by manufacturer and suppliers. Both of the sensors being out-of-date in a study that is published in 2018 is justifiable due to these sensors being very well documented and analysed. However, these sensors’ inferiority compared to their next generation
counterparts, especially in terms of noise performance highlights the need for studies focused on comparatively evaluating these sensors. As an example, according to publicly available datasheets, ITG-3200 [18] has 90% more RMS noise than ITG-3701 [19], which is a newer gyroscope in the same grade from same manufacturer. The literature review showed that low-cost comparative IMU performance evaluations are frequently conducted by performance comparisons for smartphones where sensors are built-in and purpose is generalization of algorithms. Focus on MEMS IMU evaluations are mainly on characterization and comparison between error models for various conditions. There is a great deal of work on filtering, and generalization of algorithms, especially for exploiting the built-in sensors in smartphones for various use cases. As for the performance evaluation of MEMS sensors with

6
each other, particularly in the case of gyroscopes, evaluation against other technologies such as fibre optic (FOG) and ring laser gyroscopes (RLG), especially for navigation applications. Moreover, sensor selection guides from sensor manufacturers, and sensor module manufacturers with respect to key parameters are widely available.
We have found that justification for choosing the sensors is quite vague in most of the literature. Moreover, we have seen that in most cases, low-cost MEMS IMUs that are selected are MPU6050 or ADXL3x5 series sensors, although there are many more in the market. Supported by the references, this may be due to wide availability of modules and step by step documentation via hobby electronics retailers. Especially [16] showed that there is a high difference between measurements from these three sensors and this difference is not linear for changing sampling rates, hindering generalization and making it harder to develop universal applications.
Finally, we have found performance-wise compensation for using low-cost sensors are done mostly in either filtering or algorithmic level, e.g. by usage of genetic algorithms, neural networks, filtering, noise modelling using stochastics, sensor fusion and other computation heavy methods. Using a more appropriate module for the application, with specifications that fit better to requirements of the target application, may not only increase accuracy, but also would allow reducing computation load, steps of an algorithm, bill of materials (BoM) size and more. A very simple example is using an IMU where temperature sensor is on-chip and bias variation is mapped in a look-up table (LUT) with on-chip processing capacity, compared to an IMU without a temperature sensor would save both on computation efforts and BoM size; reducing both hardware, software and electronics development efforts and manufacturing costs.

7
3 Theoretical Background Detection of driving behaviour is fundamentally dependent on the data that is collected or inferred. Our main focus is on the vehicular motion data that is collected by IMU devices without any extra device filtering or stochastic optimization. It should be noted that vehicular motion data collection can be achieved by other means such as Global Navigation Satellite Systems (GNSS), light detection and ranging modules (LIDAR), radar, computer vision, other radio frequency (RF) localization systems and so on. Understanding basics of the elements that comprise IMU devices is essential in this thesis work in order to utilize with the data from literature for choosing the right IMU devices for evaluation. Accelerometers and gyroscopes are these basic sensing elements. However, due to the scope of this thesis work, our interest is not only in accelerometers or gyroscopes, but also the additional modules that they coexist with, in low-MOQ MEMS IMUs. MEMS IMU technology, at least the portion that we are interested in is quite mature and basic information is widely available in the literature since more than a decade. Hence, we will rather continue with definitions without depth.
3.1 Inertial Measurement Unit
As the name suggests, an inertial measurement unit (IMUs) at its core, consists of inertial sensors. Moreover, within our context, where the aim is to model motion in three-dimensional space (vertical axis to a lesser extent), these sensors are typically orthogonal triaxial accelerometers and gyroscopes. IMUs may as well involve other sensors or components that are necessary for the purpose of measuring dynamics of a vehicle, or vehicular motion. These can be analog and or digital filters, analog to digital converters (ADCs), temperatures sensors, pressure sensors, barometers, processors equipped with calibration, error correction and control software, memory, communication modules and so on. Inertial measurement systems can be divided into two. Stable platform systems, and strapdown systems. The former represents the systems where initial orientation is known and aligned with the global frame, while the latter represents the systems where the system is aligned with another body (real or virtual) and initial orientation is unknown [20]. Determination of the orientation is a well-researched field, although not yet completely matured due to challenging environments.
Within the context of aftermarket UBI, considering that the device would be retrofitted to a vehicle, our focus is on strapdown systems where the orientation needs to be dynamically determined. Moreover, the system can as well be viewed as the silicon, where body is the rest of the hardware, e.g. a smart phone, an on-board unit and so on. See Figure 1 for an exemplary illustration of a strap down IMU.

8
Figure 1: An IMU device that comprises of triaxial and orthogonal accelerometer and gyroscope
with and integrated controller. The vehicle on which the device is strapped on represents anybody, that’s motion is aimed to be measured using the IMU. Courtesy of [30].
3.1.1 Grading of Inertial Measurement Units
Different applications may have fundamentally different functional requirements. An intuitive example for a functional requirement can be given in the navigation domain, as a requirement of compliance with a maximum deviation from destination within a defined range and speed. Another example for an operational requirement could be the logic levels the digital interface is operating at, or the maximum and minimum operating temperatures that the device needs to be able to operate within. Emergence of multitude of technologies, and myriad of devices with different characteristics, combined with requirements that are getting stricter, laid down the need for grading systems. Since the need for grading arose simultaneously at different locations, industries and times; different stakeholders came up with their own grading systems, ending up with quasi-proprietarization.
The common metrics in IMU grading from manufacturers and technology providers are related to bias performance. This is mainly due to the accumulated effects’ of bias characteristics
having different definitive requirements for different applications. These characteristics are, in-run bias stability and turn-on bias repeatability. As for naming the grades, terminology differs based on the industry, however for clarification in this study, the general framework is around Commercial Grade (CG), Tactical Grade (TG) and Navigation Grade (NG). CG represents Consumer, low-end Industrial and Automotive Grade as used by different stakeholders. TG

9
represents high-end Industrial and Tactical Grades. Finally, NG represents Strategic, Marine, Military and Navigational Grades. MEMS sensors are not capable of achieving NG bias performance, however they are being used on lower end of TG applications since early 2010s [27], [28]. See the grading system that is applicable for this study below in Table 1.
IMU Grade Gyroscope Bias Stability (in-run) Accelerometer Bias Stability (in-run)
Navigational < 0.01 degree/hour < 0.025 mg
Tactical 0.01 - 1 degree/hour 0.025 - 1 mg
Commercial > 1 degree/hour > 1 mg
Table 1: The table shows different IMU grades with regards to in-run bias stability characteristics [29]. These characteristics can be found on datasheets of the IMU devices. It should be noted that standard deviation and the conditions that the characteristics are as well
deterministic for grading and target applications.
3.2 Basic Principles of MEMS Gyroscopes
MEMS gyroscopes, similar to optical gyroscopes (FOG, RLG, etc.) and other modern gyroscopes – unlike mechanical gyroscopes, which actually indicate the orientation - indicates the rate of change of angle(s) over time. This is done in a similar fashion to MEMS accelerometers; by integrating the changes in angular velocity. Hence, they are referred as rate gyroscopes. Comparably MEMS gyroscopes are cheaper to manufacture than and as well they are smaller in size. The cheaper cost is mainly due to working on semiconductor where rather than the raw material, major cost being keeping the facility up and running (clean rooms), that diminishes as the manufacturing scales. There is a multitude of technologies that are popular for implementing MEMS gyroscopes. Low-cost domain is mainly served by vibrating structure gyroscopes.
3.2.1 Working Principle
Working principle of vibrating structure MEMS gyroscopes is based on Coriolis Effect at its core. Where 𝐹𝐶 is the Coriolis force, which is experienced by proof mass 𝑚 that is rotating with angular velocity ⍵ and has velocity 𝑣. Tuning fork is a structure commonly used in vibrating MEMS gyroscopes, where there are two proof masses that are vibrating. Tips of the fork in Figure 2 are the proof masses.
𝐹𝐶 = −2𝑚(⍵ 𝑥 𝑣) (3.1)
An intuitive way to think about 𝐹𝐶 is to look at it as reaction to two forces that are affecting the rotationally whole structure and linearly the proof masses. As for the fork is placed in between plates which acts as a capacitor. The Coriolis force resulting from a vibration that would cause a displacement for both proof masses in opposite directions. This vibration would lead to change in

10
capacitance. This delta in capacitance can be, in an ideal environment linearly reflected on an analog voltage. In an ideal tuning fork, distances of proof masses would be equally distant from the centre, hence the linear reflections of absolute 𝑤 would be equal on both proof masses due to both of them being structurally connected. Equally distant proof masses as well cancel out unwanted effects of irrelevant accelerations due to differential measurements. Hence the only thing that is measured is the angular velocity.
Figure 2: Tips of the tuning fork being two equivalent proof mass cancels out the unwanted
acceleration effects. Moreover, depending on placing of the microstructures and depending on weight of the proof mass, sensitivity and resolution of the sensor can be affected. The illustration
represents a tuning fork - which may be replaced with a different mechanism - that is aligned with one of the axes, in order to have a triaxial gyroscope, the system needs three orthogonal
structures. Annotation was made on the image acquired from [21]. 3.2.2 Key Characteristics
Besides attributes that are common to any active electronic components such as size, weight, power consumption, latency, reliability, price, operating temperature, lifetime, documentation etc.; there are functional attributes that are key for choosing the right gyroscope, or the right IMU that possesses the right gyroscope for the application. These characteristics are defined in the manufacturer datasheets for each sensor.
3.2.2.1 Functional Characteristics
Functional specifications of a gyroscope is key to defining suitability for an application. In this subsection we review general functional characteristics of gyroscopes that can be found on datasheets. Power and initialization related characteristics such as supply voltage, supply current, peak consumption, sleep mode consumption, startup time, logic voltage levels and so on are considerations for particular applications and as well for system design. Full Scale Range (FSR) is the maximum angular velocity that a gyroscope can measure. Usually the range can be selected using a register, allowing adjustment of resolution depending on the application. Angular Velocity and Angular Acceleration ranges respectively represents the range that a gyroscope is operational in terms of angular velocity and the maximum absolute acceleration -analogous to linear acceleration in accelerometers case- a gyroscope can measure. Output Data Rate (ODR) defines the number of samples the device produces in a second.

11
ADC Size or ADC word length is the number of bits the ADC can generate, higher the number implies higher resolution given the analog measurement range is kept same.
3.2.2.2 Error Characteristics
Characterization of gyroscopes and particularly error characteristics are widely researched areas. The focus is on increasing precision by improving repeatability and stability, and compensating for drifts by analysing non-stochastic and stochastic errors. In this subsection we review relevant error characteristics for this study.
Bias error is a common type of error for both gyroscopes and accelerometers. Intuitively, bias is the measured output when there is no angular velocity imposed on proof masses of the tuning fork, for the case of gyroscopes. For simplicity, bias error is investigated in two parts, short term and long term. While short term bias error is a deterministic offset, long term is modelled as a stochastic process; a random walk with a drift. Short term gyroscope bias (offset) can be calculated as the average of angular rate measurements over a fixed interval of time. The integral of these measurements would reflect to IMU output as an increasing angle error. Significance of this error increases as the integration span gets wider. The angular misalignment caused by integrated rate as well affects contributes to velocity errors which are integration of accelerometer measurements. Hence the data accuracy for motion tracking applications is highly dependent on bias error. Commonly dps (degree per second), and in the case of high end sensors, dph (degree per hour) is used for measuring bias offset [23]. In-run bias stability (bias instability) is the long-term counterpart of bias errors. It represents the random variation of bias over time due to pink noise. The value of instability is found as the minima in an Allan-variance graph which is plotted when the gyroscope or accelerometer is stationary. This shows the highest accuracy that is achievable with the sensor in a fixed frequency over a period of time. Turn-on to turn-on bias stability (bias repeatability) denotes the variation of bias offset between different runs. It is mainly caused by differences in state of the sensor and external factors between different runs. It does not contribute to accumulating error due to it inherently being a short term effect that can be compensated. Angle Random Walk (ARW) is the integral of the white noise in gyroscope output. ARW shows a measure of how thermo-mechanical white noise reflects on bias. Especially in open-loop systems where a correction mechanism do not exist, height of ARW is an important factor [22]. Rate noise density represents the RMS value for a particular frequency. Relevancy of this characteristic increases as the measurement frequency of the gyroscope is known for target application. Sensitivity is the smallest absolute amount of change that an IMU can detect, where the magnitude of this change is resolution. Voltage level, range of measurement and number of bits of ADCs are definitive in this characteristic. High sensitivity is essential for low error over integrated measurements [25]. Scale Factor (Scale Sensitivity) is the ratio between input of the sensor and the produced output. Since the error grows linearly with input of the sensor, scale factor error becomes more significant as the input increase, e.g. as angular velocity increases. Cross-axis Sensitivity is an issue for devices with multiple sensing elements. During manufacturing or operation, misalignments may occur in supposedly orthogonally placed sensors.

12
This would cause acceleration in on axis to be reflected on another one. It is possible to compensate for this error using software [24]. Nonlinearity is a frequently encountered source of error in inertial sensors, due to high dependency on temperature, imperfections in the MEMS structure and other reasons.
3.3 Basic Principles of MEMS Accelerometers
Commercial grade MEMS accelerometers are predominantly based on capacitive sensing technologies. As the name suggests, the sensors function is measuring acceleration. This is done in a similar fashion to MEMS gyroscopes as mentioned in section 3.2.
In lower end applications, capacitive MEMS accelerometers have a dominant position against piezoelectric, piezo resistive and tunnelling accelerometers. This is mainly due to higher temperature invariance and sensitivity that allows a wider scope of applications, capitalizing on economies of scales and a larger available market. Hence, our focus is on capacitive sensors.
It should be noted that all these aforementioned accelerometers rely on a proof mass. Moreover due to displacement being modelled in a similar fashion to a spring-mass system, the higher the mass means we can reach higher displacements, and smaller amounts of accelerations would become more belligerent. Hence, both in gyroscopes and accelerometers, movable proof masses tend to become larger and larger, in the pursuit of higher accuracy. Yet, this has a down side, that is shock survival rate and a larger proof mass is negatively correlated. This is where thermal MEMS accelerometers are finding their niche where the device does not possess a proof mass and instead works based on a thermal convection sensing principle [26]. However, these accelerometers are not under our focus for this study.
3.3.1 Working Principle
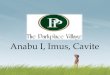
Capacitive MEMS accelerometers are vibrational sensors. A common structure that is used for implementing a capacitive MEMS accelerometer is capacitive comb-drive as can be seen in Figure 3. The name comes from the shape of the MEMS. The structure consists of a movable proof mass, with conductive fingers, connected to a base substrate, able to make linear motion. The proof mass is surrounded by fixed combs with conductive fingers. Conductive fingers of both structures composes parallel plate capacitors in pairs. As the structure accelerates, the proof mass moves and distance between conductive fingers of movable proof mass and fixed combs changes. The resulting delta in capacitance causes a delta in voltage, which is used for inferring the acceleration.

13
Figure 3: Shows a sub-structure of the comb-drive. Fixed fingers F1and F2 are connected to
reference voltage 𝑉𝑅 and 𝑉𝑅. The movable finger is connected to output where voltage is denoted as 𝑉𝑂.
As in a spring mass system, where the mass m is connected to movable finger 𝐹𝑀 with springs that have a constant of 𝑘 and the distance is represented by 𝑥. Linear acceleration is calculated based on
𝑥 = 𝐹/𝑘 (3.2)
𝑥 = 𝑚𝑎/𝑘 (3.3)
In (3.3) there are two unknowns, the displacement, and acceleration. In order to find the acceleration, commonly an integrated element calculates the distance utilizing equations based on basic capacitance charge formula
𝐶 = 𝑄/𝑉 (3.4)
Initially, the system is stable and the capacitances between fixed fingers and movable finger, 𝐶1 and 𝐶2 are equal. This is due to absolute charges on plates and absolute reference voltages being equal. Moreover, charge of movable finger, 𝑄𝑀 and the charges of fixed fingers 𝑄1 and 𝑄2 are as well static. Then the capacitance between 𝐹1 and 𝐹𝑀 would be
𝐶1 = 𝑄1/(𝑉𝑅 − 𝑉𝑂) (3.5)
and capacitance between 𝐹2 and 𝐹𝑀 would be
𝐶2 = 𝑄2/(−𝑉𝑅 − 𝑉𝑂) (3.6)
𝐶1 and 𝐶2 being equal and 𝑄1 and 𝑄2 being opposite of each other

14
𝑄1/(𝑉𝑅 − 𝑉𝑂) = 𝑄2/(−𝑉𝑅 − 𝑉𝑂) (3.7)
𝑉𝑅 − 𝑉𝑂 = 𝑉𝑅 + 𝑉𝑂 (3.8)
shows that in stable state the measured output voltage is equal to zero. When the state is not stable, the capacitances change as a function of displacement. From (3.5) and (3.6) 𝑉𝑂 is observed as
𝑉𝑂 = 𝑉𝑅(𝐶1 − 𝐶2) /(𝐶1 + 𝐶2) (3.9)
Since reference voltage is fixed, we can use (3.9), relationship between capacitance and distance between plates, and (3.3) for relating acceleration and output voltage. It should be noted that parasitic capacitances, unwanted electric fields, perturbations on reference voltages, imperfections in geometry of the structure, nonlinearity of the spring, e.g. acceleration displacement relationship are some of the sources for analog errors that can be inspected utilizing above derivations.
3.3.2 Key Characteristics
Similar to capacitive MEMS gyroscope, capacitive MEMS accelerometers possess various functional and error characteristics.
3.3.2.1 Functional Characteristics
Functional specifications of an accelerometer are key to defining suitability for an application. In this subsection we review general functional characteristics that can be found on datasheets. Accelerometers possess similar measurement and data output characteristics as a gyroscope, such as power and initialization characteristics, output data rate, and size of ADC and so on. The difference mainly lies in the units. Instead of angular velocity and degree per second accelerometer functional characteristics are mainly defined around linear acceleration using milli g (mg) and g, where g is the constant gravitational acceleration.
3.3.2.2 Error Characteristics
Sensitivity is represented in least significant bits (LSBs) per g and scale factor in mg per LSB. Scale factor error in accelerometers similar to in gyroscopes, it becomes increasingly significant over time. It contributes to uncertainties in velocity, position, pitch and roll angle calculations. The error increases linearly in case of velocity, quadratically in case of position and sinusoidally for pitch and roll angles. Rate noise density indicates the noise in RMS for particular frequencies and this reflects into uncertainties in velocity, position, pitch and roll angle in a similar way to scale factor error. Bias error and other common measurement errors, errors arising from nature of capacitive sensing and electronic instrumentation are highly analogous to the case of gyroscope. Similar to ARW for gyroscopes, Velocity Random Walk (VRW) is an important parameter for accelerometers. Moreover, for a high-precision system, for the case of accelerometers and also gyroscopes, one has to take into account changing effects of gravity. Scale factor and sensitivity errors are in the case of analog sensors defined by current or voltage and this is intrinsically limited by the supply voltage of the sensor. Moreover linearity and linearity ranges for other error characteristics need to be considered when analysing uncertainty in measurements or when compensating for errors.

15
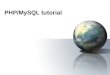
See below how position error scales for two accelerometers with different noise densities, where for accelerometer a, noise is 90 μg/sqrt(Hz) for a full scale selection of plus and minus 2 g and for accelerometer b, noise is characterized is 400 μg/sqrt(Hz) for the same scale.
First step would be to obtain RMS value that is for accelerometer a 0.9 mg and accelerometer b 4 mg. Then, for a sampling rate of 100 Hz, accumulation of the RMS values can be seen in following graphs.
Besides rate noise density, miscalculations of g, bias related errors, cross-axis sensitivity and so on have similar negative effects both on accelerometers and gyroscopes. Some of these errors can be compensated to a high extent utilizing additional filters, closed-loop correction mechanisms. However errors caused by sensitivity or rate-noise, compensation is not trivial.
Figure 4: MATLAB plots using noise density information from datasheets. See Appendix B for
the script developed for the plots.
3.4 Multi-IMU Arrays
The idea behind multi-IMU (MIMU) arrays is introducing redundancy in order to increase overall accuracy, reliability, sensitivity, measurement range and to exploit known positions of sensors relative to body for measurements -in the case of strapdown systems-, enriching and correcting data (e.g. measuring angular rates with accelerometer). Moreover redundancy inherently brings fault tolerance, hence, higher reliability [31]. Another benefit of MIMU is that; if the IMU errors are independent from each other, stochastic noise performance can be improved by a factor of square root of number of IMUs [32]. Considering both for accelerometers and gyroscopes a key contributor to error is rate noise densities, MIMUs have potential for compensating for these errors. On the downside, increasing the number of sensors come with design challenges.

16
3.5 Driving Behaviour Detection
Driving behaviour, within the context of UBI is mainly involved with behaviours that are affecting actuarial risk. Despite any correlation, this exclude behavioural classifications such as eco-friendly driving. Two main behaviours that are relevant for us are classified as aggressive and distracted driving [33]. While concluding into a driver having such a driving behaviour is a rather quantitative matter that is defined by defined sensed traits, or Figure-of-Merits (FoMs) [34] such as acceleration, breaking, speeding, smoothness, cornering, and these events’ fusion with
contextual information such as weather, state of the traffic, location and so on. The common approach for rather than deciding individually on different drivers’
behaviours using a statistical approach considering the whole population, assessing how the population performs, and utilizing statistical tools such as Gaussian distribution for defining the risky group and weighting the drivers based on subjective metrics that are developed, creating a complex relative ranking system. The quality of this relative ranking system in the end lies under the quality of the data that is collected, occasionally by inertial sensors.
Inertial sensors already exist in all modern cars as part of Electronic Stabilization Control which detects loss of traction and takes action by breaking automatically for steering the vehicle, and more traditionally as part of crash impact sensing systems, that triggers emergency mechanisms such as airbags and distress calls to emergency services. These sensors usually have certification requirements like Automotive Electronics Council’s AEC-Q100 [35] and hence, need to go through extensive quality assurance and calibration processes. The specifications of sensors targeted at airbag electronic control units, rollover detection units and other applications differ to a high extent especially by sensitivity and measurement range and quite frequently instead of IMU that integrate triaxial accelerometers and triaxial gyroscopes, uniaxial or biaxial inertial sensors are deployed separately, in an ad-hoc manner. As for the driving behaviour detection, certifications and usage if uniaxial and biaxial more-robust and reliable sensors are deemed unnecessary in many cases due to generalization principle of smartphone UBI programs.
Usage of sensors embedded in smartphone for driving behaviour detection has fundamental advantages such as virtually enabling affordable UBI solutions for all smartphone owners [39]. The aim of generalization is to allow same algorithms run on different platforms that might use different sensors and alignment errors due to manufacturing process on both MEMS, PCB, and product level. From IMU perspective, driving behaviour detection can be approached in a number of different ways. Detecting harsh breaks and rapid accelerations within a short period of time is possible utilizing IMU sensors. Together with GNSS, dead reckoning capabilities of an IMU improves localisation, hence enriches the detected driving data that can be used for detecting vehicle manoeuvres and aggressiveness [36]. Detection of small to large impacts, total time spent for parking the vehicle, speed while taking turns, usage of smartphone (in case the smartphone IMU is being used), no-GNSS localization using known road conditions [37] are some of the capabilities IMU bring into driving behaviour detection. Among other applications, dead reckoning is a well-researched topic where position of the vehicle is detected without utilizing a GNSS or other external device, but instead the position and orientation information is obtained by utilizing the sensor [38]. Importance of this application is mainly due to it being instrumental for detecting driving behaviour at places where GNSS, visual or other information is not available. A major challenge is accuracy and drifting estimates due to accumulating errors. As graphs in 3.3.2 suggests, a key contributor for the drifts is the rate noise performances that cannot be compensated as in the case of misalignments or short term biases.

17
4 Methods
This section includes the methodology that was followed for the survey, experiment, and their analysis.
4.1 Survey on Low-Cost MEMS IMUs
We conducted a survey on consumer-grade low-MOQ MEMS capacitive IMUs. The main reason behind that was the findings from the literature review. Majority of the experiments were utilizing the same low-cost sensors where the results and findings were extrapolated into a representation of the whole genre. Aligned with our goal of finding the most suitable IMU sensor for driving behaviour detection and analysis, this pinpointed the need for a public document that aggregate and expose the larger portion of this genre of low-cost MEMS IMUs. Moreover, survey acted as a tool for designing the experiment where selection of components was of great importance in order to make a relevant analysis for driving behaviour.
Initially, we defined the cost metric for the scope of the survey, where low-cost represented lower than ten dollars per piece for batch of a hundred. The reason behind the cost per piece for batch of a hundred rather than just a cost per piece cap, was to get a more realistic price point. Common electronics supply knowledge suggests - considering global suppliers - low-cost low-MOQ component prices vary highest in lower quantities. Unit price per a batch of a hundred can be less than half of unit price for a single component order. On the other hand the difference between unit price per thousand would commonly merely be priced 10% less than unit price per hundred. Intuitively, the reduction in the price together with increase in quantity resembles a graph of law of diminishing returns.
Hence, selecting price per unit for batch of a hundred as our metric not only increased price consistency, but also eliminated the components that are less accessible from our survey where minimum order quantities are above a thousand units. This was an important step due to our focus being Usage Based Insurance technologies and the key expected benefactors from our results being new entrants to the industry, where high MOQ components are financially infeasible at early stages.
Following the cost metric, we elaborated on the IMUs that we are looking for, considering the context. As mentioned in the theoretical background section, IMUs can come with different components (e.g. different types of sensors, filters, processing units, memory, and inertial sensors with different number of axes). We selected orthogonal triaxial accelerometers and gyroscopes as mandatory components (i.e. three MEMS accelerometers and three MEMS gyroscopes embedded in the same silicon). Literature review showed that magnetometers were commonly used together with inertial sensors, as it is affected by earth’s magnetic field and this can be used for providing
a reference direction. However, literature review also showed that in vehicular environments, surrounding metals and electromagnetic disturbances hinder the operation of magnetometers in most cases, hence, for generality and for keeping the cost low we excluded IMUs that consist of magnetometers in our survey.
Finally, we analysed the industry. We have found that main players for capacitive both MEMS accelerometers and gyroscopes were found to be as STMicroelectronics (STM), Invensense, Bosch Sensortec and Analog Devices. However due to Analog Devices not having a low-cost IMU that integrates accelerometer and a gyroscope we limited our search with STM, Invensense and Bosch Sensortec.

18
Sources defined, we conducted our exhaustive research and created a list of all non-end-of-life (EOL) low-cost MEMS IMUs that consist at minimum triaxial accelerometer and a triaxial gyroscope. 29 of the IMUs we have found were low-MOQ and below $10 per piece for a batch of a hundred. For the pricing information, we chose Farnell, Avnet, Digikey, Mouser, Future, Newark and RS Components as data source since mentioned being global and trusted suppliers. We used Octopart, a search engine for electronic components that aggregates inventories of aforementioned suppliers for selecting the lowest price. Moreover we discarded prices where stock is not available in order to comply with low-MOQ requirement.
4.1.1 Metrics
Having a list of IMUs within our defined low-cost price range, we continued with collecting manufacturer datasheets for all 29 IMUs. Using the research we conducted for literature review and theoretical background, we selected metrics follows:
1. Recommended: manufacturers publish EOL times and if a product is recommended for a new design or not. Importance of this comes from maintainability of the design.
2. Low-MOQ: although all 29 IMUs are low-MOQ, we kept this metric due to consistency with a larger collection we created where non-low-MOQ components coexist.
3. Package: Land Grid Array (LGA), Quad Flat No-leads (QFN), Ball Grid Array (BGA) are some of the integrated circuit packages that can come with different shapes. The idea behind standardized packaging is that it enables pin compatibility, where a component from one manufacturer can be replaced by a component from another manufacturer.
4. Sensors: as mentioned before the minimum requirement for IMU was to have triaxial accelerometer and triaxial gyroscope, however some IMUs had additional sensors such as compass and barometer.
5. Size: width, length and height of the package. For the case of QFN packages, due to the area they take his higher, they were annotated separate than LGA packages.
6. Operating Temperature: defines the temperature range where device is operational. Moreover, data sheets provide additional information regarding errors (e.g. ZRO, sensitivity) with respect to temperature and usually the temperature range where characteristics is linear is narrower than operating temperature. This makes higher temperature ranges more favourable considering vehicular environments.
7. Digital Output: similar to low-MOQ we kept this metric due to consistency with a larger collection. Higher-end sensors, and some consumer-grade sensors from Analog Devices have the option of outputting analog measurements as voltage or current. Digital output for non-high-precision application like UBI can be seen as a convenience layer.
8. Accelerometer Full Scale Range: selectable absolute g ranges of triaxial accelerometer in the IMU
9. Accelerometer Sensitivity: sensitivities for selectable g ranges (LSB/g) 10. Accelerometer Noise (rate noise density): represents rms of error as a function of
frequency. Moreover depending on selected full scale range the noise changes in a nonlinear fashion - as represented by formula utilized in datasheets.
11. Gyroscope Full Scale Range: selectable absolute g ranges of triaxial gyroscope in the IMU (deg/sec)
12. Gyroscope Sensitivity: sensitivities for selectable g ranges (LSB/deg/s) 13. Gyroscope Noise (rate noise density): same as accelerometer, difference is that in general
variation for different full scale ranges is less compared to accelerometer noise.

19
14. Voltage levels (logic): represents acceptable digital logic levels 15. Voltage levels (operating): represents voltage levels where the IMU is operational 16. Inter-integrated Circuit (I2C): a serial communication protocol 17. Serial Peripheral Interface (SPI): a serial communication protocol 18. On-Chip Application Processor: availability of built-in programmable application
processor (e.g. Digital Motion Processor (DMP) of Invensense) 19. Price per piece per batch of 100
An excerpt from the survey is available in Appendix C.
4.1.2 Selection of IMUs
Selection of most suitable IMUs for the experimental setup was the main goal of the survey. For this, we prioritized metrics and started the selection by eliminating the components that do not have the metrics we need. From the larger survey perspective where non-low-MOQ components were also existent, first step was to eliminate the non-low-MOQ components. A major convenience for the experimental setup was the pin compatibility requirement. We aimed at having pin compatibility in selected IMUs since being able to mount them on the exact same hardware platform would mean less design effort, higher accuracy for measurements and standardization. Hence, we started with eliminating components with unwanted packages. Analysing the IMUs by the packaging, we have found that both 24-pin LGA and 24-pin QFN packages are from Invensense and all of them possess an application processor (DMP) where computation load can be partially hosted on the MEMS IMU. However optimization with application processor was out of our scope. Hence, we discarded 24-pin packages, avoiding unnecessary complexity for the system architecture.
Figure 5: Bar graph representation of filtered IMUs that fit our initial selection metrics, by
packages.

20
Looking at other metrics such as accelerometer and gyroscope full range and sensitivity, we did not find a significant difference due to all IMU devices having 16-bit integrated ADCs. Operating temperature as well was not crucial due to minimum span being between 40 degrees under zero and 85 degrees Celsius. For the logic voltage metric only one IMU was not capable of operating with 3.3V logic (see experimental setup).
Rate noise, as highlighted in theoretical background was a most important metric for both accelerometers and gyroscopes. Hence, with the IMUs left after elimination, to further cut-down a package type we looked into range of rate noise. Datasheets showed that rate noises for LGA-14 packages lie between 70 to 180 ug/sqrt(Hz) and 0.0038 to 0.014 dps/sqrt(Hz) respectively for accelerometers and gyroscopes. For the case of LGA-16 packages noises were between 90 to 220 ug/sqrt(Hz) and 0.004 to 0.013 dps/sqrt(Hz). Moreover both package groups included IMUs from STM, Bosch Sensortec and Invensense. Looking deeper into datasheets, for the case of LSM6DS3 and LSM6DS33 we found that the MEMS unit is same and only difference is packaging for pin-compatibility of the same IP with other IMUs. Further, we found that LGA-14 IMUs were more adopted by smartphone manufacturers - such us Bosch Sensortec’s BMI160 being used in iPhone
X and LSM6DSL being used in Samsung Galaxy S9 series. Prominence of usage of smartphones in UBI programs, tackling unnecessary additional complexity for hardware design and manufacturing due to two pins that are not even connected and finally having more IMU options 10 vs 8 led us to choosing LGA-14 IMUs over LGA-16 ones.
This left us with the following sensors:
IMU Accel Noise @ FS=0 ug/sqrt(Hz)
Gyro Noise @ FS=0 dps/sqrt(Hz)
Price ($)
ICM-20600 100 0.004 1.76
LSM6DS3US 90 0.006 1.89
LSM6DSO 70 0.0038 1.99
LSM6DSM 75 0.0038 2.14
LSM6DS3TR 90 0.005 2.20
LSM6DS3H 90 0.006 2.42
LSM6DS3 90 0.007 2.47
BMI160 180 0.008 2.58
LSM6DSL 80 0.004 2.63
ISM330DLC 75 0.0038 3.61
Table 2: IMU modules that are left after filtering with selected metrics.
From the table above, we selected ICM-20600 [40] form Invensense, BMI160 [41] from Bosch Sensortec, both LSM6DSL [42] and LSM6DSO [43]. The reason of not selecting more

21
expensive STM IMU ISM330DLC was basically it being variant of LSM6DSM with 10 years of longevity commitment. While the reason behind choosing LSM6DSL over other STM IMUs was it being deployed in high-end smartphones. We did not have another option for Bosch Sensortec IMU BMI160 in order to cover all manufacturers. Finally, reason behind selecting second STM sensor as LSM6DSO was while having almost equivalent noise characteristics to LSM6DSL, not being ultra-low-power and being also targeted at Electronics and Optical Image Stabilization applications with a low price made it attractive. It should be noted that price points are not proportional with higher technology, rather they are mainly caused by demand, and the fixed costs the manufacturing plant have for operating a clean room and so on. Hence, higher price should not imply that a sensor is necessarily better in certain aspects [44].
4.2 Experiment
This section goes into the details of the experiment we designed and implemented. Particularly on the setup, system architecture, hardware design, briefly on the embedded software design, quality assurance and finally the environment where the experiment is conducted.
4.2.1 Experimental Setup
A major milestone for the experimental setup was the output of the survey, since without selecting IMUs it would not have been possible to design the system. After selecting the IMUs we had three options:
1. Modelling the IMU devices characteristics in a virtual simulation environment (e.g. Simulink) and running simulations, then utilizing a toolbox for further analysing the simulations (e.g. Signal Processing Toolbox)
2. Procuring evaluation kits of the selected sensors, deciding on a system architecture, programming the kits using evaluation, designing a structure for mounting the kits and field testing.
3. Designing a system architecture, developing own hardware and software, designing a structure for mounting the kits and field testing.
Option 3 was selected with a potential fall back to option 2 as a risk mitigation measure
and designed a high-level system architecture that involves hardware and software components based on the datasheets of selected IMU sensors, with the aim of data acquisition.
As for the hardware, in order to exploit the advantages of IMU arrays (e.g. reduction of independent stochastic noise), in the system we included 4 IMUs per board and we named it Quad-IMU board (QIMU). In order to achieve a modular structure, we excluded any external storage or communication modules from QIMU. In order to select the communication protocol, we collected maximum output data rates (ODR) from the datasheets for both low noise and high performance modes.

22
IMU ODRmax (Hz), [accel, gyro]
6-axis Bandwidth (kHz)
Low Noise ODRmax (Hz)
6-axis Bandwidth (kHz)
ICM-20600 8000, 4000 1152 500, 333.3 80
BMI160 1600, 3200 460.8 400, NA NA
LSM6DSL 6664, 6664 1279.5 52, 52 10
LSM6DSO 6664, 6664 1279.5 52, NA NA
Total 43456 Hz 4.172 MHz NA NA
Total for QIMUs
173824 Hz 16.688 MHz NA NA
Table 3: Selected IMUs with bandwidth information.
ODRs showed that using a serial communication such as I2C or even SPI would not
provide the required bandwidth for maximum output rates for 4 QIMUs. Moreover I2C being much slower than SPI, and the IMUs having only 2 configurable I2C addresses for correct addressing 4 is needed made us discard the I2C option as communication protocol. We utilized integrated SPI capabilities of the sensors in our architecture and instead of using external shift registers or pull ups and expanders that would have needed for I2C. In order to reduce driver development efforts, we did not use a daisy chain [45] configuration but instead we used an independent slave configuration. Another reason for avoiding daisy chaining was that the planned architecture needed to be flexible in terms of IMUs that are connected due to modularity, and in a daisy chain configuration varying FIFO sizes would have made integration of new sensors more challenging. Furthermore, in order to allow the data acquisition device to be a master for more slaves than its SPI driver allows, we introduced a multiplexing and bit banging scheme. Considering the effects of this scheme on data acquisition devices and communication channel’s performance, we further
reduced the expected ODR for sensors of IMUs to sub-1000 level. Finally, for reaching modularity objective we decided to involve a board-to-board connector as an SPI extension.

23
Figure 6: Illustration representing hardware system architecture. For simplicity of the diagram,
passive components, pull ups and pull downs that are needed for slave select pins are not included. See appendix A for schematics of the QIMU board.
4.2.2 Data Acquisition Platforms
Devices for data acquisition was selected by convenience, considering availability and authors past experience. Mainly influenced by availability of open-source device drivers, ATmega2560 based Arduino platform was used for rapid prototyping and testing of procured evaluation kits for first experience with raw IMU data. After validating the functionality of evaluation kits using the open-source libraries, we developed minimal drivers on a Raspberry Pi 3 Model B+, utilizing a small portion of the IMUs registers and capabilities. We chose to use a Linux based system in order to exploit operating system capabilities and on-board memory. Further, for future development, contribution to open-source community and potential integration of the IP into other applications were in favour of using a Linux based ARM system instead of a niche embedded platform.

24
4.2.3 Hardware Design
This subchapter discusses the methodology and the process that is followed for designing, procuring and assembling the 2 PCBs. The software tools we used are:
CircuitMaker: schematic design, physical layout design, design rule checking, PCB project management, manufacturing file generation. [47]
GerbView: viewing and modifying Gerber files [48] Eagle: converting Top Paste (GTP) file to DXF file [49] Autodesk Viewer: viewing and modifying DXF file [50] Generic Embedded Reflow Software: for controlling reflow soldering process
4.2.3.1 Schematics Development of schematics were mainly influenced by the guidelines provided by manufacturer datasheets. The differences from the guideline was due to hosting multiple IMUs on the same PCB and following a slightly different approach than suggested (e.g. not separating supply voltage and logic level voltage). Further, we introduced a stacking SPI scheme which blocks usage of I2C communication while on the other hand increasing sensor accuracy and simplifying measurements by aligning the sensor boards. We developed 2 schematics, one for LSM6DSL, LSM6DSO and ICM-20600, and one for BMI160. This was due to BMI160 having a slightly different physical layout –despite having the same package- while a small mismatch could cause design failure that would not have been possible to fix in a short time frame.
4.2.3.2 Physical Layout
We based the physical layout design on guidelines from MEMS IMU manufacturers [46]. The portions of physical layout that are underneath the IMU chip were marked as keep-out regions which means tracks, placement of vias, pads and other components were not allowed on either side of the board. IMU devices were placed relatively far away from mounting holes and edges of the board, in order to reduce negative effect that occur due to stress. Capacitors were placed close to supply pins of each IMU and connectors that may cause stress to IMUs were placed to edges. We spent additional effort on top overlay to reduce component ambiguity and mitigate assembly errors. Moreover in a similar fashion to commercial evaluation kits, we placed a coordinate indicator with equal distance to corners of the IMUs. Finally, two of the IMUs were placed symmetrically and across the centre lines of the board for easier post-measurement compensation and calibration. Dimension of both boards, as reported to PCB manufacturing contractor is 27.56mm x 25.65mm and besides top overlay only significant difference between two physical layouts is dimensions of the IMU pads. In the image below, the connectors on left side, J3 and J4 (see Figure 7) are for stacking QIMU boards on top of each other for enabling a well-structured testbed for different IMUs. Finally, the mounting holes have a diameter of 2.75mm that is suitable for fastening with M3 screws and nuts, which are commonly used fasteners.

25
Figure 7: Physical layout of the LSM6DSx PCB as seen in CircuitMaker PCB view. Orange
surfaces indicate top layer, blue indicates bottom layer, grey indicates solder, red indicates holes, purple indicates keep out zone and finally the rest is solder mask. Width of the design, as
reported by physical layout interface of the Computer Aided Design (CAD) tool is 27.814mm and height is 25.909mm.
4.2.3.3 Procurement
PCBWay was used for manufacturing the two PCBs. We ordered a standard 1.524 mm FR-4 board with top solder thickness of 0.0254 mm top and bottom copper of 0.03556 mm each. As for the component procurement we used Mouser and Farnell (see Table 4).

26
Figure 8: A QIMU that can be stacked on other QIMUs to extend the SPI network, moreover as
its name suggests, it can be the base board for 5 different IMU devices. The text overlay on upper right corner indicates that this board is compatible with LSM6DSO, LSM6DSL,
LSM6DS3, LSM6DSH and LSM6DSL.
Selection of components (except the IMUs) were based on availability, price, and footprint availability. As the PCBs arrived, a circuit test was conducted in order to find design faults early in the process. This was done using a multimeter. For some of the components of which’s
footprints were unavailable and there were no alternative, we designed footprints using the CAD software CircuitMaker’s footprint design interface.

27
Designator Supplier Order Code Package (on PCB) Qty Per Board
J1 Farnell 2847914 6 way 2 row SMD 2.54mm 1
J2 Farnell 1593438 5 way 1 row TH 2.54mm 1
J3 Farnell 1593440 6 way 2 row TH 2.54mm 1
J4 Farnell 1593488 6 way 2 row TH 2.54mm 1
R1:R4 Farnell 2331727 0603 (imperial) 4
R1:R4 Farnell 2447451 0603 (imperial) 4
C1:C4 Farnell 2627427 0603 (imperial) 4
U1:U4 Sensors Sensors 14-LGA 4
LSM6DSL Mouser 511-LSM6DSL LGA-14 4
LSM6DSO Mouser 511-LSM6DSO LGA-14 4
ICM-20600 Farnell 2911511 LGA-14 2
ICM-20600 Mouser 410-ICM-20600 LGA-14 2
BMI160 Mouser 262-BMI160 LGA-14 4
Table 4: An excerpt from spreadsheet containing Bill of Materials (BoM).
4.2.3.4 Assembly and Testing
Initially, there were two options for the PCB assembly for prototypes. First one was to contract a PCB manufacturer, such as PCBWay and the second one was to do assembly in-house. We went for the second option and kept the first option as a fall back plan due to following 3 reasons:
1. IMU assembly guidelines from all manufacturers warn against stress during assembly as well as stress during application. Since the order we made was a small prototyping quantity, we did not have any quality assurance or non-stress care option for an assembly request.
2. Lead time for the PCBs from PCB Assembly (PCBA) provider would have increased at least by 2 weeks if we requested them to procure the sensors on our behalf. On top of that an orientation error such as misplacement of an IMU would have broken the design. This was a high risk due to number of boards to be assembled being as small as 4, meaning instead of a PCBA machine a technician would manually deploy the sensors.
3. Gaining know-how for reflow, assembly of LGA parts, creating stencils and overall PCBA process was a hidden goal for the author.

28
Upon arrival of all the components, we made an appointment with Institute of Electronics and Telecommunications of Rennes (I.E.T.R.) in order to use their machinery. First step for beginning prototype assembly was the stencil. Due to pin distances being between LGA-14 part being approximately 0.1 mm, and due to pads being hidden under the packaging during deployment, hand soldering was not an option. Moreover we were against using a heat gun for the purpose of soldering. Hence, the option was reflow soldering and for that we needed to have a uniformly distributed solder paste. The CNC machine required either a GER or a DXF file. We imported GTP and Outline files from our Gerber output to Eagle, in order to refine and convert them to a DXF file. Laboratory technician Jean Cristophe operated the CNC machine in order to deliver the 0.1 mm thick metal stencil as specified by DXF file.
Figure 9: Stencil that is made for BMI160 IMU.
We used the stencils for applying the solder paste, especially for LGA packages this was the only way. Metal bars, or connections between gaps of IMUs showed that the CNC was precise enough, hence we deemed the stencils suitable (see Figure 9). After applying solder paste over stencil to the PCBs one by one using a spatula, we placed the IMUs to their locations utilizing a microscope and an antistatic precision pincer as can be seen below.

29
Figure 10: Solder paste can be seen on surfaces of the pads. Paste on the surface of right-most pins of IMU U3 were mixed with each other, however reflow process electrically separated the
pads due to paste being applied using a thin stencil.
After all the IMUs were placed, we continued with reflow process where reflow controller V3 Pro from Beta Layout was utilized for the control of the oven. As the reflow process ended, we again utilized multimeter for checking connections. We detected a few short circuits. Later on, we utilized a soldering iron that is heated to 200 degrees Celsius to fix the short circuits of 3 of the QIMU boards. That was when the decision of making the LGA pads unnecessarily long proved useful on physical layout. The reason for setting the soldering iron to 200 degrees Celsius was for protection of the IMU. Once the IMUs were on place and electrical connections were correct (except LGA pin to PCB pad) we hand soldered resistors, capacitors, Surface Mount Device (SMD) and Through Hole (TH) connectors for the QIMUs. Finally, for increasing reliability of experiment by reducing misalignments and uneven vibration effects that are caused by dynamics of the vehicle, we stacked the QIMU boards on top of each other using SPI stack header and fastened using 12 mm spacers on all corners in between the boards. After fastening the boards, we used a calliper for measuring board to board (from bottom of lower board to top of upper board) distances using a calibrated calliper with maximum device error of 0.01 mm. We made the measurements from both sides of all holes from centre of 2 available edges. All our measurements were between 14.9 mm and 15 mm. In total 2 iterations of 16 measurements.

30
Figure 11: From top to bottom, QIMU with STM’s LSM6DSL, LSM6DSO and Bosch
Sensortec’s BMI160
4.2.4 Experiment Environment and Data Acquisition
For the task of collecting data related to vehicle dynamics, particularly with a focus on FoMs that were mentioned in Chapter 3.5, instead of a virtual environment (e.g. modeling a vehicle and simulating) we decided to conduct the experiment on field. The reason for that was both convenience due to additional development efforts that are required for a model and expectation of an expected inherent higher reliability of the data that is collected from a real physical setup. For this purpose we needed a vehicle, a track and a focus on what type of data we were interested in. We we decided to collect data on two types of figures of merit; rapid acceleration and harsh breaking. For this purpose, we needed a track where a straight path was available. Moreover, the track needed to be closed to traffic in order for us to not endanger it nor potentially risk lives or property. Due to time of the year being winter and traffic safety reasons, we obtained a permission from a closed underground car parking lot’s officer in Vallingby. We agreed to limit our maximum
speed with 30 km/h and selected a path that has double the safety margin in terms of length compared to what we needed. As for the vehicle, we used a rental Peugeot 208. We fitted our data acquisition setup inside the vehicle, in a fashion where orientation of the QIMU, smartphone and sensor breakout are aligned on all three axes. This was verified using the software by trial and error. The unknown orientation was of the smartphone’s since the QIMUs and the sensor breakout
board had their orientation printed on top overlay of the PCBs. See the data acquisition setup on Figure 12.

31
Figure 12: Data acquisition setup inside the vehicle can be seen above. A Raspberry Pi 3 Model B+ (1), power supply (2), an MPU6050 breakout with pullup resistors for I2C communication
(3) –it should be noted that I2C bus isn’t connected- and a QIMU that is assembled and configured with four BMI160 IMUs (4). The rubber band that is used for fixing (4) was strapped
after confirming the orientations of QIMU, MPU6050 and the smartphone were aligned. In the image above, a Samsung Galaxy S9+ was placed under the breadboard although it is not visible in the image. The smartphone itself contains an LSM6DSL IMU. We used Android version of MATLAB version 4.4.1 for accessing this built-in IMU. For collecting data from (3) we used an Atmega2560 board. We configured the C program we developed for Raspberry Pi for configuring the LSM6DSL to output raw 16-bit data. Manually, at the time of executing the C program, we started MATLAB on Android for logging acceleration data in order to capture the same motion. MATLAB app had a limitation on output data rate, e.g. 0.5 Hz to 100 Hz. Due to this reason and our ad-hoc SPI firmware not being able to handle high speed communication – which we found that the limitation was due to a limitation from the API that is provided by the smartphone. This limited us with an output configuration with up to 100 Hz for the sake of the experiment. Nevertheless 100 Hz was more than enough for detecting vehicular motion since it was a standard rate for most experiments. Hence, we configured the QIMU that is equipped with BMI160 for an ODR of 100 Hz. Another important variable was the full scale range. Again due to our application not requiring detecting shocks or shock-like vibrations, we selected the minimum selectable range; plus and minus 2g for the accelerometer (see Appendix C) and 125 dps for the gyroscope. Since the IMU utilizes a 16-bit ADC, reducing the full scale range and keeping the samples 16-bit makes the resolution and sensitivity higher, producing a more accurate data linearly and inversely proportional to full scale range.
In order to exploit multiple IMUs that QIMU module consist with minimal additional software development effort, we used hardware SPI chip select pins. This allowed us to quasi-

32
simultaneously acquire data from two IMUs. Our initial bit banging and software SPI implementation approaches did not suit the time plan, hence, we used only two of the IMUs for this purpose, due to having two hardware SPI chip select pins. However, for static measurements we used all four IMUs sequentially. See figures 13-17 as an excerpt from collected data. Finally, we use RMSE method for comparing individual IMUs on the same QIMU. This decision was in line with our findings in literature review and is especially essential for evaluating the individual IMUs in QIMU.
5 Results and Analysis
This section reflects the results of the study, survey and the experiment.
5.1 Survey
The survey involved an in-depth research with both technological and economic aspects. 19 metrics were used of which some were developed during the study, and applied on more than 100 components. Besides being part of the methodology as can be seen on Tables 2 and 3, a key output of the survey is the list of consumer-grade, low-cost, non-low-MOQ barriered, MEMS IMUs that can be seen in Appendix C. In order to give a numerical summary, among our self-defined low-cost IMU findings, 17.2% of were not recommended by manufacturers; despite still being actively supplied with publicly available lead times. Predominantly 3 different semiconductor packaging was preferred by manufacturers, as can be seen in Figure 5. IMUs showed to be including various functional or communication-related components. None of the components were certified for safety-critical applications. Datasheets showed that these digital IMUs were predominantly comprising 16-bit ADCs with variable sensitivity and full scale ranges. Almost all were supporting I2C protocol yet some did not possess SPI. Development was mostly affected by influenced by smartphones and we made this inference due to increasing built-in Image Stability functionality ratio on newer IMUs. According to rate noise information from datasheets (see Table2), we found LSM6DSO to be the most suitable sensor for incorporating in DriveTrust.
5.2 Experiment
Hardware and software development and the subsequent experiment was partially successful. We failed to assemble the QIMU involving ICM-20600 PCB due to an unconventional decision of applying reflow twice, due to a procurement bottleneck. After damaging and short circuiting the pads for one of the IMUs, we were not able to communicate with the initially successfully assembled IMUs. During fixing efforts we damaged and destroyed a track; completely galvanically isolating the SPIs MOSI bus. After that point it was irreversible and due to not having

33
access to pads under the working IMUs, they were also wasted. Hence, we scrapped ICM-20600 QIMU.
Another black-box issue was that the stacked QIMUs were behaving non-deterministic. Meaning, the readings we mirror into terminal were getting stuck at particular values. Not having a protocol analyzer or an oscilloscope handy made it guesswork and eventually we separated all QIMUs from the stacked structure and investigated individually. After hardware debugging using an SPI driver, a multimeter and a few jumpers, we found that LSM6DSO QIMU had one of the IMUs interfering with the MISO bus, jamming the communication. It was not possible to observe this potential problem while checking for the signals after initial assembly. Due to time requirements we did not involve LSM6DSO in the experiment as well. Eventually these problems lead into us not being able to exploit the stacking structure. We elaborated on the experiment and continued with the working parts (see Figure 12). Among the FoMs, we looked into harsh breaking and acceleration, and saw clear uniaxial and triaxial (respectively see Figure 13-14 and Figure 15) patterns on x-axis between LSM6DSL that is embedded in Samsung Galaxy S9+ and both BMI160s of the QIMU.
Figure 13: A 10 second excerpt from experiment on harsh breaking on a straight path, collected by the smartphone.

34
Figure 14: A 10 second excerpt from experiment on harsh breaking on a straight path, collected by first
BMI160 in QIMU that can be seen on Figure 12.
Figure 15: Sum of all axes (x, y and z) for both first BMI160 and smartphones built-in
LSM6DSL sensor, over a 10 second excerpt.

35
This potentially gives us basic means for detecting harsh accelerations both on positive and negative directions using low-computation methods such as thresholding using moving average filters and so on. Detection of harsh breaking using sum of all axes has the clearest pattern especially during deceleration, as can be seen on Figure 15. Moreover it is clear that Samsung has an intermediary firmware layer in its API for providing the sensory data for collection, where bias is being removed, and this is clear from Figure 13 where data from y-axis starts with a 0 mg. It should as well be noted that the signal is clearly much noisier compared to BMI160.
Besides response characteristic to motion, deviation of this characteristic is also very important. This especially becomes prominent in applications such as dead reckoning and in order to accurately identify FoMs, the IMU needs to be as deterministic as possible. Hence, we looked into noise behaviour in mechanically stable state for two BMI160, an MPU9150 and an MPU9250.
We subtracted the mean of the signals in order to remove the bias and then calculated the RMSE for representing noise performance. Considering the uniaxial lesser RMS (mg) is indicator of a more deterministic results, a very common sensor, MPU9250, performed the worse while two BMI160s performing best among 3 types of sensors.
Figure 16: Static measurement of x-axis over 20 seconds at 100 Hz. Noise in MPU series IMUs are noteworthy.

36
Figure 17: Static measurement of y-axis over 20 seconds at 100 Hz. While second BMI160 sensor is performing very well, first BMI160 shows a square wavy pattern.
Figure 18: Static measurement of z-axis over 20 seconds at 100 Hz. Contrarily to Figure 17, first BMI160 IMU is performing better in terms of noise. Second BMI160 has large spikes, and not
producing correct values.

37
Figure 19: Second BMI160 does not have any affect from axes except z-axis, an example of the crosstalk issue on MISO bus in SPI communication. It can be seen that the noise is added up on first BMI160, MPU9150 and MPU9250.
Unit: mg BMI160_1 BMI160_2 MPU9150 MPU9250 x 0.0037 0.00046 0.033 0.139 y 0.0041 0.00025 0.03 0.141 z 0.0089 0.0441 0.044 0.144
sum 0.0102 0.044 0.063 0.0216 Table 5: RMSE for different IMUs on different axes.
According to the findings that are disclosed in Table 5 and noise characteristics information in datasheets, BMI160 performs much better compared to older and very commonly used MPU9150 and MPU9250 from Invensense.
The interesting axes for us, due to motion application being vehicular dynamics are x and y-axis. It can be seen that BMI160 performs approximately an order of magnitude better than MPU9150 and roughly two orders of magnitude better than MPU9250 in terms of RMSE values.

38
6 Discussion and Conclusion
Inertial measurement units and their applications in the UBI domain showed to be a wide domain with a plethora of research from both hardware (mechanics and electronics), software, signal processing, communication and business perspectives. In Chapter 2 we presented our findings from the literature and identified the past work around the IMUs, their comparison, evaluation and applications on various fields that have similar requirements to vehicle dynamic.
In Chapter 3 we revisited the basics of IMUs, identified the interesting aspects of them for the purpose of this study. Moreover, for capacitive accelerometers and gyroscopes we briefly explained the theory of operation, functional characteristics and operational characteristics. We presented basic simulations on propagation of the noise in order to pinpoint importance of the noise characteristics. Showing the efforts for proprietarization of these technologies by various industries or various players in particular industries, we delved into grading schemes and fused the different grades into three primary, easy-to-interpret grades for the UBI applications. We briefly explained the concept of multi-IMU arrays and their benefits such as dependability and increasing accuracy of the measurements. Finally, we shortly including a mentioning about the concept of driving behavior detection and the technological means for this purpose.
Chapter 4 covered the methods we used over the breadth of this study, including a survey, an experiment in the field and static measurements. We developed own and utilized others’ metrics
for the survey, in order to define what is low-cost in UBI context and which sort of IMUs suit to our needs. Then we collected the data using a manual research with input from the industry, such as white papers and datasheets as a guidance for fulfilling the metrics. For the experiment, we designed a system architecture with hardware, software and interfaces (e.g. communication). Then we designed, ordered, procured and assembled hardware. Namely the QIMU, a multi-IMU array involving four individually addressable IMUs. In the mean time we developed minimal software and we tested both using common non-safety-critical methods. Finally, we justified our decisions by referring to past research in the field and by simple induction.
Chapter 5 presented the results of the survey and explained the findings of the experiment. The focus was on the uniaxial and triaxial comparisons between the accelerometers of IMUs that were successfully developed and minimally programmed for digital raw data.
As for the conclusion from DriveTrust’s perspective, we decided to have a final evaluation between LSM6DSO and BMI160 for including in the product. The know-how built over the course of the exam work and lessons learned are to be incorporated into this evaluation. See Section 6.1 for the most significant limitations that are to be considered in the further evaluation. Moreover, further improvements on the QIMU, and subsequent planned open-sourcing in our opinion will be of value to both researchers, and to industry.

39
6.1 Limitations and Future Work
Implementation of an embedded system has multiple challenges both on hardware and software sides. A most efficient way with a focus on quality assurance in mind has been shown by Loghi et al. [51]. This required parallel development of software and hardware in order to avoid sequentiality. In our case, we set an ambitious goal over the course of exam work, designing four different separate embedded systems, and their external interfacing with a COTS available single board computer and another COTS available microcontroller. While the challenge was not substantial on the hardware side, due to our appropriate initial research and including hardware development difficulty as a selection metric (e.g. package and pinouts of the IMUs), the software was abruptly different and incompatible. Register maps, initial configurations that are required, data rates and so on, due to underlying technologies in these IMUs being different (e.g. the architectures), we had to compromise from the goal and minimise the development efforts on the go. This caused us not being able to exploit the functionality these IMUs provide but merely settling with raw measurements. Due to these measurements being raw values, without exploiting the whole architectures and resources of IMUs; it is indeed not possible to say device A is better than device B. Moreover, as for our reference, we used a single smartphone, which might be a faulty production or a problematic sample. Not validating the tools we used, and not using professional tools is another key limitation of this study; illegitimizing the measurements we made.
As for the QIMU, the datasheets of the IMUs were suggesting separate capacitors for each voltage input of each sensor (e.g. operating voltage and voltage for logic levels). However we instead used a single capacitor, and used a single voltage source for both of the inputs of IMUs. Connecting all the IMUs in the same buses, and not observing the bus (e.g. in case of noise or spikes due to natural operation of the devices) also is a question mark that is left with the study.
The field measurements we made were made in a closed underground car park. Considering the surface being an almost perfectly flat concrete surface –that may potentially be producing different response on the IMUs- is another left question mark after the study. However it was not possible to verify it due to roads being partially frozen and slippery due to Stockholm winter. Moreover we did not try to obtain a permit to make an experiment in the real traffic. This further pinpoints another limitation, using data collected in a short amount of ride does not necessarily have to be representative of potential future rides. Hence, a longer experiment that involves different cars and longer data collection with a control mechanism for detecting false negatives, false positives and so on should be developed in order to be able to argue for generalization of one IMU being better than the other one in the UBI context.
The RMSE measurements and the collected data showed us that variation between the datasheet values, in terms of noise performance ranking of the IMUs is clearly reflected on real measurements for the case of accelerometers. However we have concerns on the quality of the data that is collected. Moreover, although the survey was complete, inferring to an overall suitability of an IMU for UBI, without considering the integrated gyroscopes empirically is hindering the contribution our findings. Future work should be conducted with more capable software and better tested hardware in a more reliable testing environment. A daisy chained communication protocol

40
should be bit banged for exploiting the updated QIMUs and this needs to be tested using protocol analysers. Further, the future developments should be as well done in a modular fashion, especially for the software, in order to simplify deployment and incorporation of more and different sensors in a stackable fashion as QIMUs. Finally, the QIMUs should be tested for stress response and more precise measurements should be made, not only for selecting –if available- more reliable types of stacking connectors but also to be able to compensate for different measurements that are made by different IMUs on the same body due to IMUs being placed on different locations.
6.2 Ethics and Sustainability
As many other technologies, the research on MEMS IMUs is also highly funded by defense industry. Although these funding enabling research that provides value to societies out of military context (e.g. drones, camera stabilizers etc.), MEMS IMUs achieving tactical grade is a major ethical concern. One particular example of such negative sides of developments in IMU technology is inertial missile technology (e.g. AGM-114 Hellfire). MEMS IMUs due to their inexpensive natures, making guided missiles much more affordable and accessible –due to their predecessor IMUs being very expensive- is indeed an ethical concern for improving accuracy. One could argue that guided missile is better than unguided missile, however for us, no tool that is made with the purpose of harming society is better than any other.
Regarding sustainability, one can argue that the MEMS IMUs are made from silicon and their footprints is negligible compared to predecessors which contain many different parts, elements and larger footprints. Hence, the more MEMS IMUs replacing the older IMUs, the environmental impact that arises from incorporation of inertial sensors would also be reduced. This study currently makes a minor contribution in this direction, however, as improvements in QIMU or another scheme that may be branched from it gets adopted by a group of researchers, it can accelerate development and utilization of MIMUs, replacing older sensors.

41
References
[1] Maslow, A. H. (1943). A Theory of Human Motivation. Psychological Review, 50(4), 370-96.
[2] European Automobile Manufacturers Association. (2017). ACEA Report, Vehicles in Use, Europe 2017.
[3] European Commission - Europa EU. (2017) Annual Accident Report 2017.
[4] European Commission - Europa EU. (April, 2018) Road safety in the European Union – Trends, statistics and main challenges.
[5] Perez, S. (1994). Individual evaluation system for motorcar risk. EP0700009B1.
[6] Progressive Casualty Insurance Co (1996). Motor vehicle monitoring system for determining a cost of insurance. US5797134A.
[7] Litman, T. A. (2002). Implementing Pay-As-You-Drive Vehicle Insurance. Policy Options, The Institute for Public Policy Research, London.
[8] Bordoff, J., & Noel, P. (2010). Pay-as-You-Drive Auto Insurance. Issues of the Day: 100 Commentaries on Climate, Energy, the Environment, Transportation, and Public Health Policy, 150.
[9] Mohan, P., Padmanabhan, V. N., & Ramjee, R. (2008, November). Nericell: rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM conference on Embedded network sensor systems (pp. 323-336). ACM.
[10] DriveTrust – AI Powered Driving Evaluation. Available: http://www.drivetrust.eu/ [Accessed: 2018-12-07]
[11] Townsend, K. (2017, March 14). Comparing Gyroscope Datasheets. Available: https://learn.adafruit.com/comparing-gyroscope-datasheets [Accessed: 2018-11-10]
[12] Mourcou, Q., Fleury, A., Franco, C., Klopcic, F., & Vuillerme, N. (2015). Performance evaluation of smartphone inertial sensors measurement for range of motion. Sensors, 15(9), 23168-23187.
[13] Machaj J., Racko J., Brida P. (2016) Performance Comparison of Sensor Implemented in Smartphones with X-IMU. In: Nguyen N., Iliadis L., Manolopoulos Y., Trawiński B. (eds)
Computational Collective Intelligence. ICCCI 2016. Lecture Notes in Computer Science, vol 9876. Springer, Cham.
[14] Ban Y, Niu X, Zhang T, et al. Low-end MEMS IMU can contribute in GPS/INS deep integration. 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014. IEEE, 2014: 746-752
[15] De Agostino, M., Manzino, A. M., & Piras, M. (2010, May). Performances comparison of different MEMS-based IMUs. In Position Location and Navigation Symposium (PLANS), 2010 IEEE/ION (pp. 187-201). IEEE.
[16] González, A., Olazagoitia, J. L., & Vinolas, J. (2018). A Low-Cost Data Acquisition System for Automobile Dynamics Applications. Sensors (Basel, Switzerland), 18(2), 366. doi:10.3390/s18020366

42
[17] Yi-Ju Lu, Chun-Ju Chang, Ching-Wei Chang, and Sai-Wei Yang. 2018. Accuracy Comparisons in IMU sensor and Motion Analysis Software. In Proceedings of the 2018 2nd International Conference on Mechatronics Systems and Control Engineering (ICMSCE 2018). ACM, New York, NY, USA, 13-16. DOI: https://doi-org.focus.lib.kth.se/10.1145/3185066.3185082
[18] Invensense. Invensense ITG-3200 Datasheet. [Online]. Available: https://store.invensense.com/datasheets/invensense/ITG-3200.pdf [Accessed: 2018-11-10] [19] Invensense. Invensense ITG-3701 Datasheet. [Online]. Available: https://store.invensense.com/datasheets/invensense/PS-ITG-3701.pdf [Accessed: 2018-11-10] [20] O. J. Woodman. An introduction to inertial navigation. Technical Report UCAMCL-TR-696, University of Cambridge, Computer Laboratory, Aug. 2007.
[21] N. Yazdi, F. Ayazi and K. Najafi, "Micromachined inertial sensors," in Proceedings of the IEEE, vol. 86, no. 8, pp. 1640-1659, Aug. 1998. doi: 10.1109/5.704269
[22] W. Stockwell, “Angle random walk,” Crossbow Technology, Inc., Tech. Rep., 2000
[23] M. Grewal and A. Andrews, "How Good Is Your Gyro [Ask the Experts]," in IEEE Control Systems Magazine, vol. 30, no. 1, pp. 12-86, Feb. 2010.
doi: 10.1109/MCS.2009.935122
[24] Guerinoni, L., Falorni, L. G., & Gattere, G. (2017). Modelling Cross Axis Sensitivity in MEMS Coriolis Vibratory Gyroscopes. Proceedings, 1(4), 281. https://doi.org/10.3390/proceedings1040281
[25] Raymond, C. (2011). Evaluating inertial measurement units. Test & Measurement World, 34-37.
[26] Mukherjee, R., Basu, J., Mandal, P., & Guha, P. K. (2017). A review of micromachined thermal accelerometers. Journal of Micromechanics and Microengineering, 27(12), 123002. https://doi.org/10.1088/1361-6439/aa964d
[27] Barbour, N., Hopkins, R., Kourepenis, A., & Ward, P. (2010). Inertial MEMS system applications. CHARLES STARK DRAPER LAB INC CAMBRIDGE MA.
[28] High-End Gyroscopes, Accelerometers and IMUs for Defense, Aerospace & Industrial, Yole Development, 2015
[29] Barbour, N. M. (2010). Inertial navigation sensors. Charles Stark Draper Lab Inc Cambridge Ma.
[30] Lawrence, A. (1998). Modern Inertial Technology. Mechanical Engineering Series. Springer New York, 30-31. https://doi.org/10.1007/978-1-4612-1734-3
[31] Nilsson, J., & Skog, I. (2016). Inertial sensor arrays — A literature review. 2016 European Navigation Conference (ENC). doi:10.1109/euronav.2016.7530551
[32] J-O. Nilsson, I. Skog, P. Handel, and A. Nehorai, ¨ “Inertial Sensor Arrays, Maximum
Likelihood, and Cramer-Rao Bound”, IEEE Transactions on Signal Processing, Vol. 64, No. 16, Aug. 2016

43
[33] Bone, Sterling & Mowen, John. (2006). Identifying the traits of aggressive and distracted drivers: A hierarchical trait model approach. Journal of Consumer Behaviour. 5. 454 - 464. 10.1002/cb.193.
[34] Skog, Isaac & Bonawiede, Farid & Welch, Richard & Ohlsson, Jens & Händel, Peter & Wahlström, Johan & Ohlsson, Martin. (2014). Insurance Telematics: Opportunities and Challenges with the Smartphone Solution. Submitted to IEEE Intelligent Transportation Systems Magazine. 6. 10.1109/MITS.2014.2343262.
[35] Automotive Electronics Council, Component Technical Committee (2007): Failure Mechanism Based Stress Test Qualification for Integrated Circuits, AEC-Q100-Rev-G [36] Cervantes-Villanueva, J., Carrillo-Zapata, D., Terroso-Saenz, F., Valdes-Vela, M., & Skarmeta, A. F. (2016). Vehicle Maneuver Detection with Accelerometer-Based Classification. Sensors (Basel, Switzerland), 16(10), 1618. doi:10.3390/s16101618
[37] Gim, J., & Ahn, C. (2018). IMU-Based Virtual Road Profile Sensor for Vehicle Localization. Sensors, 18(10), 3344. https://doi.org/10.3390/s18103344
[38] Manon Kok, Jeroen D. Hol and Thomas B. Sch¨on (2017), ”Using Inertial Sensors for Position
and Orientation Estimation”, Foundations and Trends in Signal Processing: Vol. 11: No. 1-2, pp 1-153. http://dx.doi.org/10.1561/2000000094
[39] Handel, P., Ohlsson, J., Ohlsson, M., Skog, I., & Nygren, E. (2014). Smartphone-Based Measurement Systems for Road Vehicle Traffic Monitoring and Usage-Based Insurance. IEEE Systems Journal, 8(4), 1238–1248. https://doi.org/10.1109/jsyst.2013.2292721
[40] InvenSense. (2016). Datasheet - ICM-20600 High Performance 6-Axis MEMS MotionTracking™ Device in 2.5x3x0.91mm Package.
[41] Bosch Sensortec. (2015). Datasheet - BMI160 Small, low power inertial measurement unit.
[42] STM. (2018). Datasheet - LSM6DSL - iNEMO inertial module: Always-on 3D accelerometer and 3D gyroscope.
[43] STM. (2018). Datasheet - LSM6DSO - iNEMO inertial module: Always-on 3D accelerometer and 3D gyroscope.
[44] Jones, S. W. (2009). Understanding the costs of mems products. IC Knowledge LLC.
[45] Maxim Integrated Application Note 3947 "Daisy-Chaining SPI Devices"; Dec. 15, 2006; accessed Dec 5, 2018 at URL <http://www.maximintegrated.com/en/app-notes/index.mvp/id/3947>.
[46] InvenSense. (2016). Application Note - Accelerometer and Gyroscope Design Guidelines.
[47] CircuitMaker 1.3.0.181. Altium, 2018.
[48] Gerbview 7.68. Software Companions, 2018.
[49] Autodesk Eagle 9.1.3. Autodesk, 2018.
[50] Autodesk Viewer, 2018. [Online]. Available: https://viewer.autodesk.com/. [Accessed: 08- Dec- 2019].

44
[51] Loghi, M., Margaria, T., Pravadelli, G., & Steffen, B. (2005). Dynamic and Formal Verification of Embedded Systems: A Comparative Survey | SpringerLink. Available: https://link.springer.com/article/10.1007/s10766-005-8911-2 [Accessed: 08- Dec- 2019].

45
Appendices
Appendix A: Schematics

46
Appendix B: MATLAB Scripts
% Plotting Accelerometer Noise Density Contribution to Velocity Error % % 1) LSM6DSO: 70 ug/sqrt(Hz) at 100Hz % 2) MPU-6000: 400 ug/sqrt(Hz) at 100Hz % velocity_err(70, 60, 100, 9.86, "Noise Density Contribution to Velocity Error", [0 60], [0 5], 1) function velocity_err(noiseDensity, duration, f, g, ... title_label, xlim_values, ylim_values, sensorNo) %duration of measurement in seconds t = 1:duration; velocityErr = zeros(1, duration); noiseDensity = 10^-6 * noiseDensity; %rms of the noise rms = sqrt(noiseDensity^2*f); %velocity error calculation, e.g. integration of rate error for c = 1:duration velocityErr(c) = rms*g*t(c); end %plot if sensorNo == 1 plot(t, velocityErr, '-', 'LineWidth',4); legend('LSM6DSO','fontsize',18); hold all; velocity_err(400, 60, 100, 9.86, title_label, xlim_values, ylim_values, 2) elseif sensorNo == 2 plot(t, velocityErr, '--', 'LineWidth',4, 'DisplayName', 'MPU-6000'); end grid on; title(title_label,'fontsize',18); xlim(xlim_values); ylim(ylim_values); xlabel("Time (s)",'fontsize',18); ylabel("Velocity Error (m/s)",'fontsize',18); hold off;

47
% Plotting Accelerometer Noise Density Contribution to Position Error % % 1) LSM6DSO: 70 ug/sqrt(Hz) at 100Hz % 2) MPU-6000: 400 ug/sqrt(Hz) at 100Hz % pos_err(70, 60, 100, 9.86, "Noise Density Contribution to Position Error", [0 60], [0 100], 1) function pos_err(noiseDensity, duration, f, g, ... title_label, xlim_values, ylim_values, sensorNo) %duration of measurement in seconds t = 1:duration; posErr = zeros(1, duration); noiseDensity = 10^-6 * noiseDensity; %rms of the noise rms = sqrt(noiseDensity^2*f); %position error calculation, e.g. integration of velocity error for c = 1:duration posErr(c) = 0.5*rms*g*t(c)^2; end %plot if sensorNo == 1 plot(t, posErr, '-', 'LineWidth',4); legend('LSM6DSO','fontsize',18); hold all; pos_err(400, 60, 100, 9.86, title_label, [0 60], [0 100], 2) elseif sensorNo == 2 plot(t, posErr, '--', 'LineWidth',4, 'DisplayName', 'MPU-6000'); end grid on; title(title_label,'fontsize',18); xlim(xlim_values); ylim(ylim_values); xlabel("Time (s)",'fontsize',18); ylabel("Position Error (m)",'fontsize',18); hold off;

48
Appendix C: Excerpt from the IMU survey
IMU Recommended COTS Package Sensors Size (mm) Op.Temp. (C) D_out
ICM-20600 Y Y 14-pin LGA Accel, Gyro 2.5x3x0.91 -40 - +85 Y
ICM-20602 Y Y 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
LSM6DS3US Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
LSM6DS33 Y Y 16-pin LGA Accel, Gyro 3x3x0.86 -40 - +85 Y
LSM6DSO Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
LSM6DSM Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
LSM6DS3TR Y N 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
LSM6DS3H Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
LSM6DS3 Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
BMI160 Y Y 14-pin LGA Accel, Gyro 2.5x3x0.8 -40 - +85 Y
LSM6DSL Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
BMI055 Y Y 14-pin LGA Accel, Gyro 3x4.5x0.95 -40 - +85 Y
ICM-20609 Y Y 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
ICM-20948 Y Y 24-pin QFN Accel, Gyro, Comp 3x3x1 -40 - +85 Y
ICM-20689 Y Y 24-pin QFN Accel, Gyro 4x4x0.9 -40 - +85 Y
ICM-20608-G N Y 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
ISM330DLC Y Y 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +85 Y
BMI085 Y Y 16-pin LGA Accel, Gyro 3x4.5x0.95 -40 - +85 Y
ICM-20648 Y Y 24-pin QFN Accel, Gyro 3x3x0.9 -40 - +105 Y
ICG-20660/L Y Y 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
MPU 6050 N Y 24-pin QFN Accel, Gyro 4x4x0.9 -40 - +105 Y
ICM-20789 Y Y 24-pin LGA Accel, Gyro, Baro 4x4x1.365 -40 - +85 Y
MPU 6500 N Y 24-pin QFN Accel, Gyro 3x3x0.9 -40 - +105 Y
MPU-9250 N Y 24-pin QFN Accel, Gyro, Comp 3x3x1 -40 - +85 Y
MPU 6000 N Y 24-pin QFN Accel, Gyro 4x4x0.9 -40 - +105 Y
ICM-20601 Y Y 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
BHI160 Y Y 24-pin LGA Accel, Gyro 3x3x0.95 -40 - +85 Y
ICM-20649 Y Y 24-pin QFN Accel, Gyro 3x3x0.75 -40 - +105 Y
IAM-20680 Y N 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y
ICM-20690 Y N 14-pin LGA Accel, Gyro 2.5x3x0.91 -40 - +85 Y

49
ASM330LXH Y N 16-pin LGA Accel, Gyro 3x3x1.1 -40 - +85 Y
ASM330LHH Y N 14-pin LGA Accel, Gyro 2.5x3x0.83 -40 - +105 Y
MPU-9150 N Y 24-pin LGA Accel, Gyro, Comp 4x4x1 -40 - +85 Y
ICM-20603 Y N 16-pin LGA Accel, Gyro 3x3x0.75 -40 - +85 Y

50
Appendix D: Bill of Materials
Using the PCBWay Product number, it is possible to order the boards for prototyping.
PCB Designs (BMI160 and LSM6XX)
Designator Supplier Order Code Package (on
PCB) Qty Per Board
Note Total Needed
Ordered
J1 Farnell 2847914 6 way 2 row
SMD 2.54mm 1 5 5
J2 Farnell 1593438 5 way 1 row TH 2.54mm
1 5 5
J3 Farnell 1593440 6 way 2 row TH 2.54mm
1 Interchangeable
with J4 5 5
J4 Farnell 1593488 6 way 2 row TH 2.54mm
1 Interchangeable
with J3 5 5
R1:R4 Farnell 2331727 0603
(imperial) 4 1k (Alternative) 25 25
R1:R4 Farnell 2447451 0603
(imperial) 4 9k1 25 25
C1:C4 Farnell 2627427 0603
(imperial) 4 100nF 0603 10% 25 25
Bypass Farnell 2763216 TH 1 1uF 10% 3 3
U1:U4 Sensors Sensors 14-LGA 4 Any of the below 4 each 4 each
Sensors
LSM6DSL Mouser 511-
LSM6DSLTR LGA-14 4
LSM6DSO Mouser 511-
LSM6DSOTR LGA-14 4
ICM-20600 Farnell 2911511 LGA-14 2
ICM-20600 Mouser 410-ICM-
20600 LGA-14 2
BMI160 Mouser 262-BMI160 LGA-14 4
PCBWay
Board Name
Product No Order ID
Quantity
LSMx Board
W214716ASR3 G216933 10
BMIx Board
W214716ASR4 G216933 5

www.kth.seTRITA-EECS-EX-2019:13