Embed Size (px)
Citation preview
Comparison of CFEM and DG methods
1
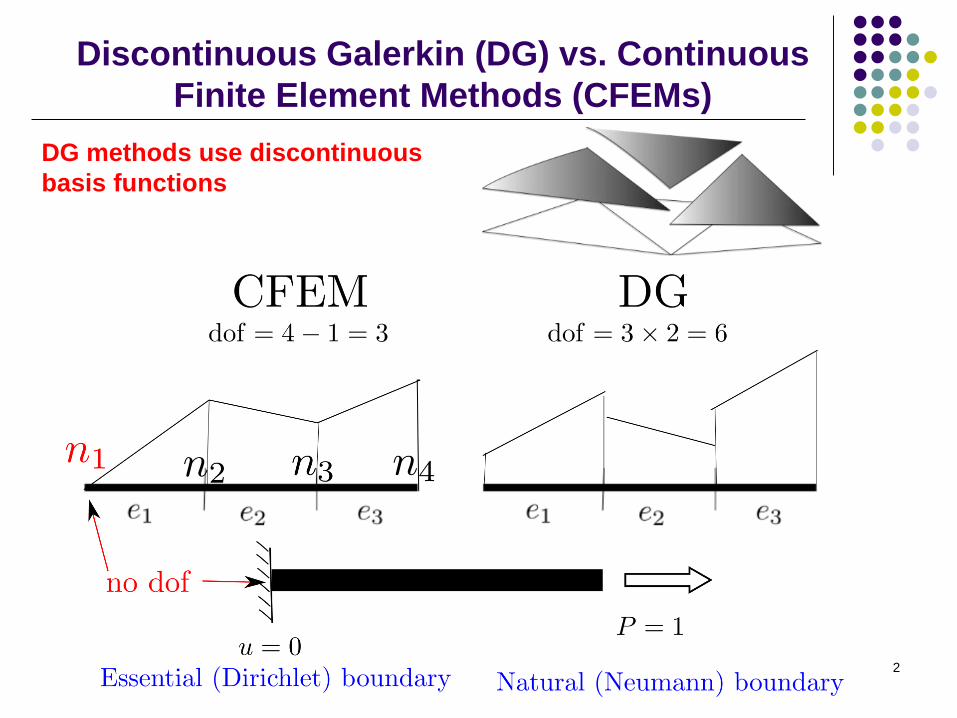
Discontinuous Galerkin (DG) vs. Continuous
Finite Element Methods (CFEMs)
DG methods use discontinuous
basis functions
2
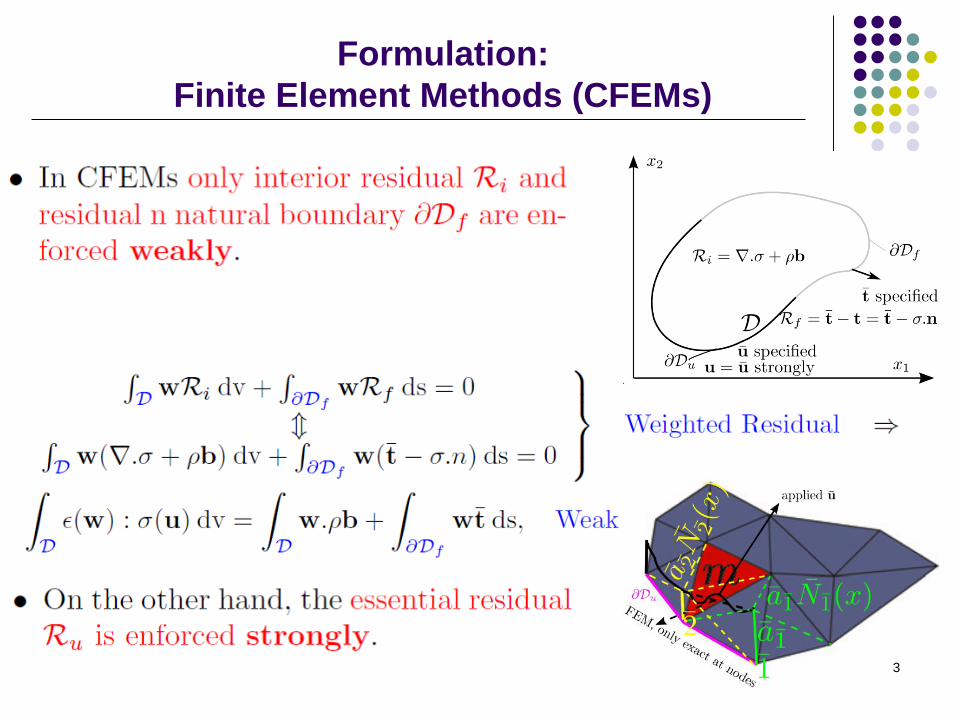
Formulation:
Finite Element Methods (CFEMs)
3
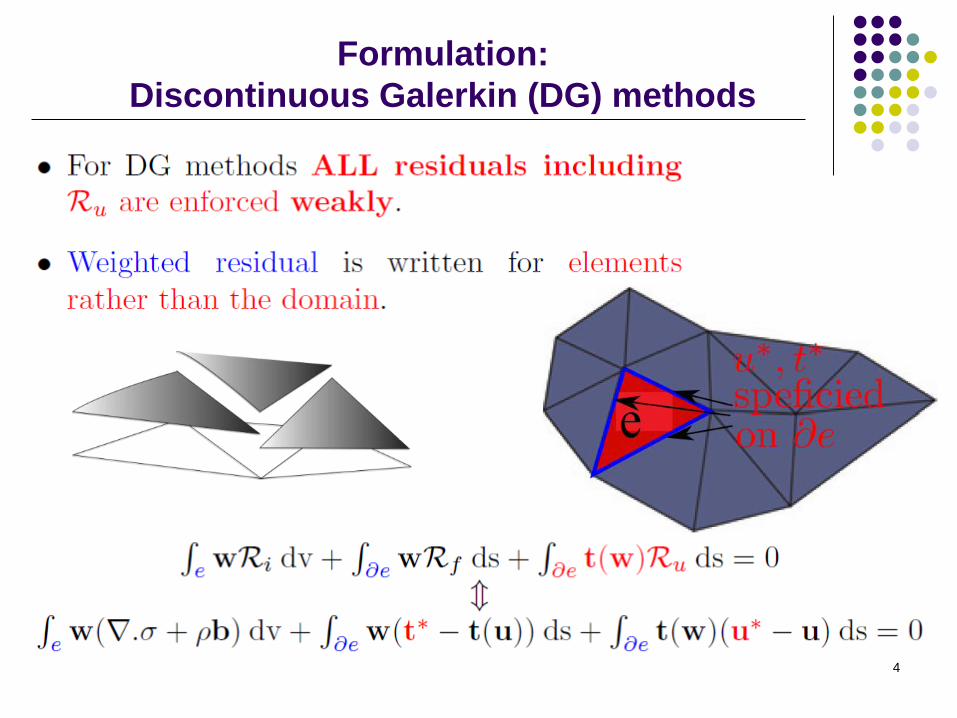
Formulation:
Discontinuous Galerkin (DG) methods
4
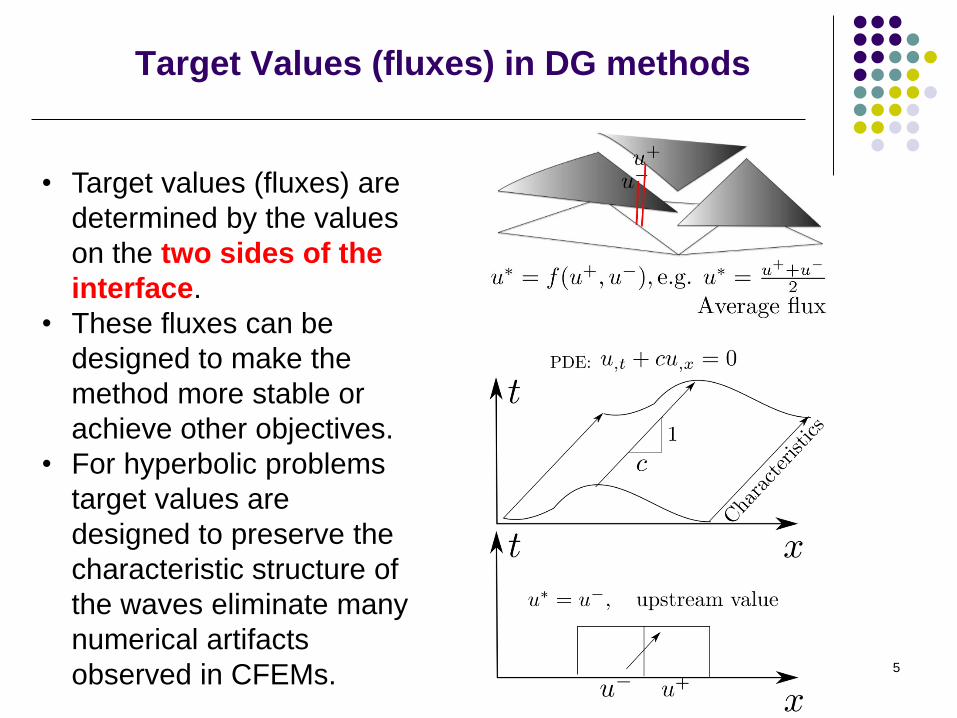
Target Values (fluxes) in DG methods
• Target values (fluxes) are
determined by the values
on the two sides of the
interface.
• These fluxes can be
designed to make the
method more stable or
achieve other objectives.
• For hyperbolic problems
target values are
designed to preserve the
characteristic structure of
the waves eliminate many
numerical artifacts
observed in CFEMs. 5
Comparison of CFEM and DG methods:• Advantages of CFEMs
• Preliminaries
• Advantages of DG methods
6
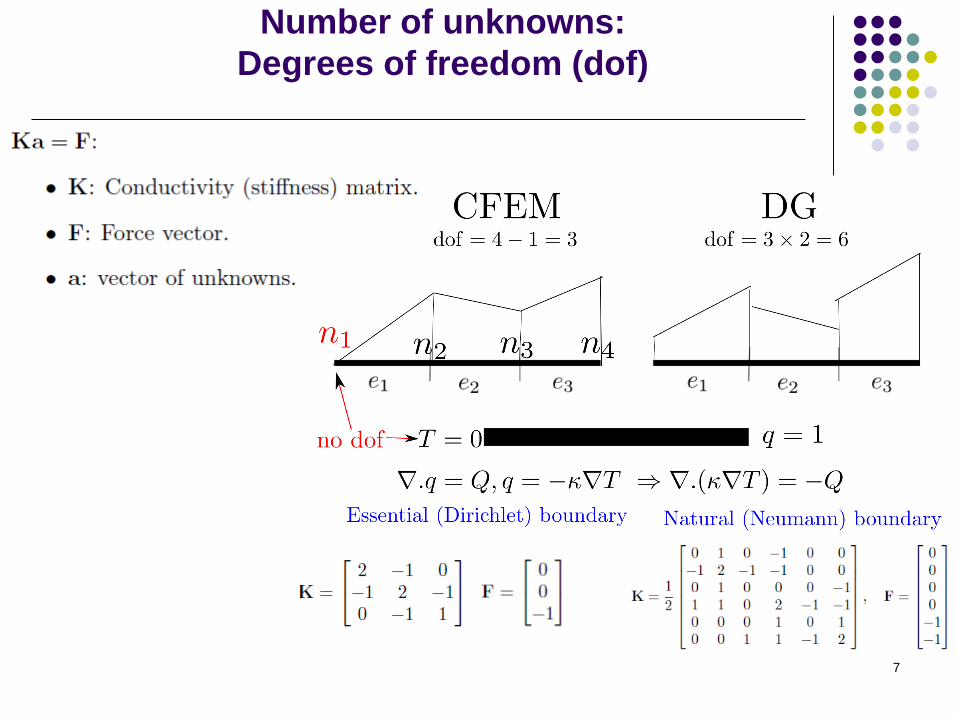
Number of unknowns:
Degrees of freedom (dof)
7
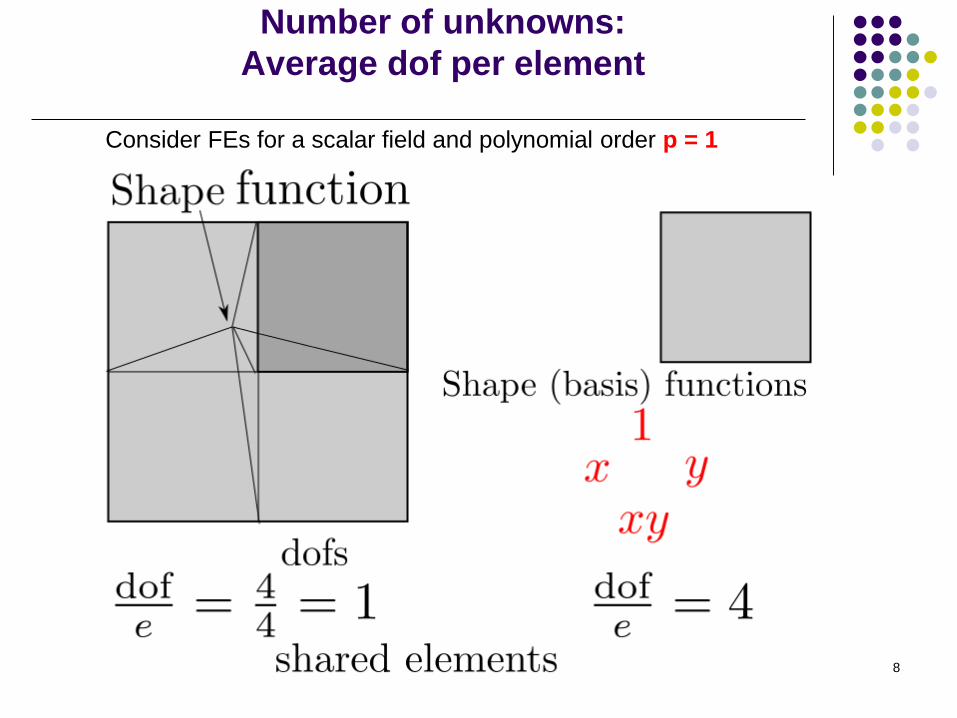
Number of unknowns:
Average dof per element
Consider FEs for a scalar field and polynomial order p = 1
8
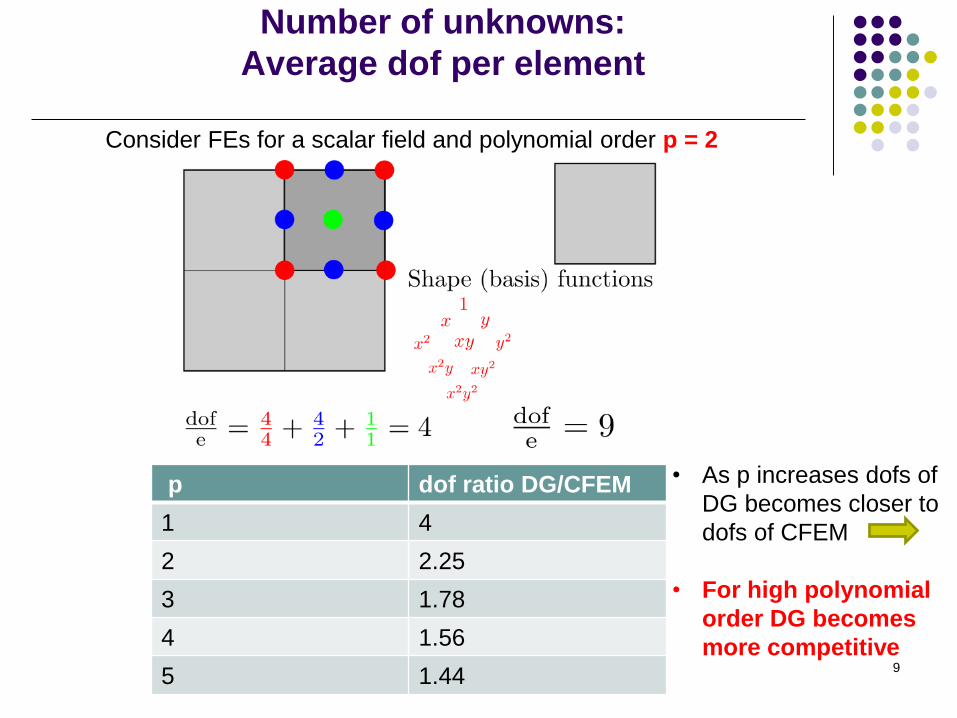
Number of unknowns:
Average dof per element
Consider FEs for a scalar field and polynomial order p = 2
p dof ratio DG/CFEM
1 4
2 2.25
3 1.78
4 1.56
5 1.44
• As p increases dofs of
DG becomes closer to
dofs of CFEM
• For high polynomial
order DG becomes
more competitive9
Comparison of CFEM and DG methods:• Advantages of CFEMs
• Preliminaries
• Advantages of DG methods
10
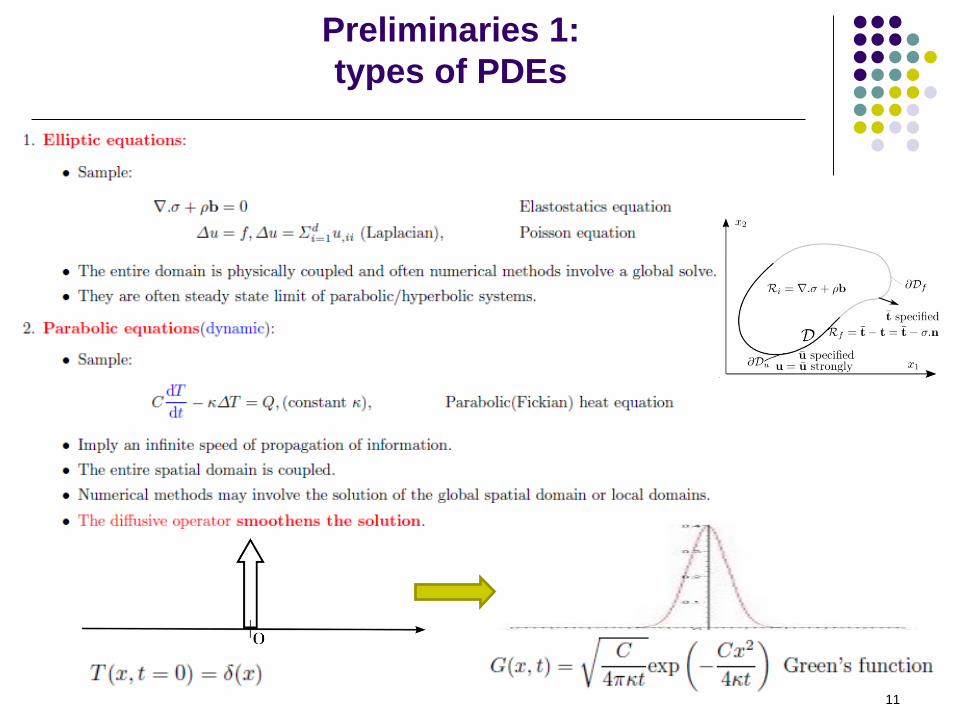
Preliminaries 1:
types of PDEs
11
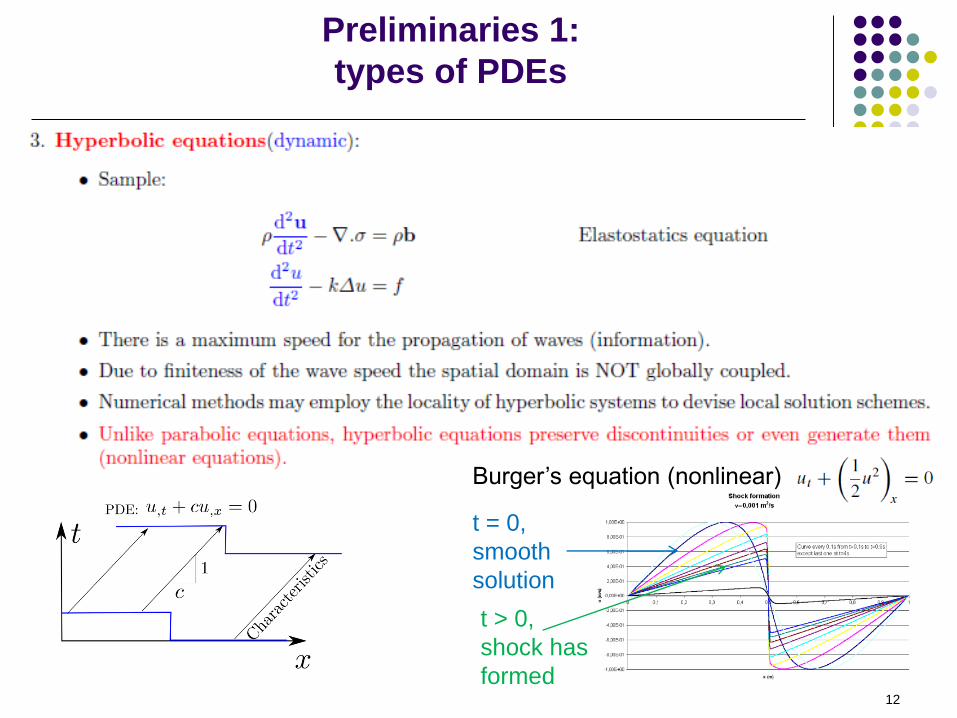
t = 0,
smooth
solution
t > 0,
shock has
formed
Burger’s equation (nonlinear)
Preliminaries 1:
types of PDEs
12
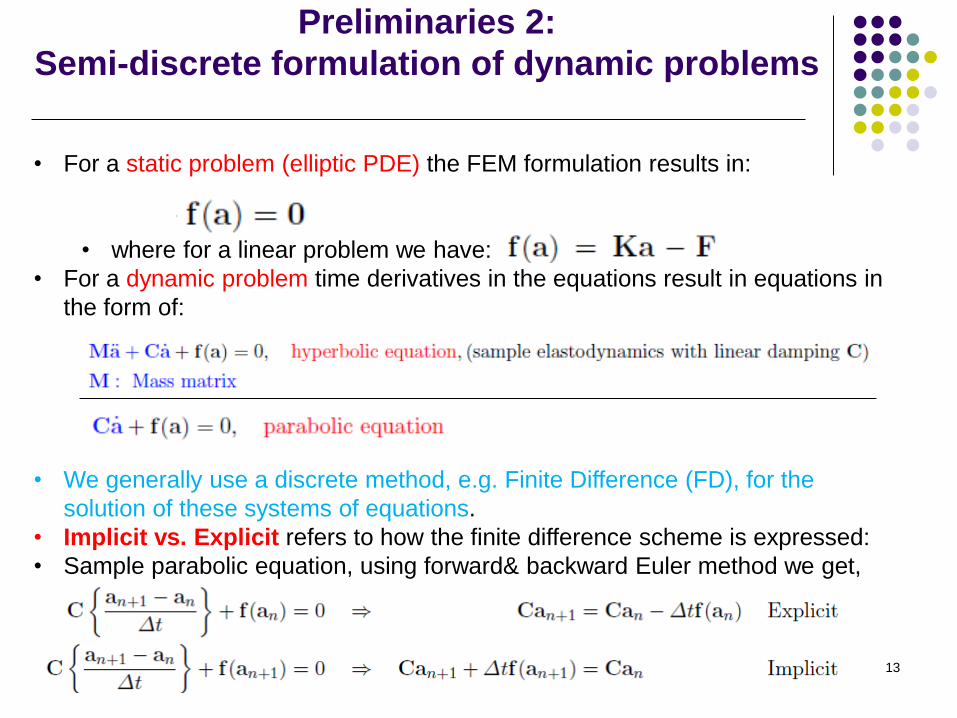
Preliminaries 2:
Semi-discrete formulation of dynamic problems
• For a static problem (elliptic PDE) the FEM formulation results in:
• where for a linear problem we have:
• For a dynamic problem time derivatives in the equations result in equations in
the form of:
• We generally use a discrete method, e.g. Finite Difference (FD), for the
solution of these systems of equations.
• Implicit vs. Explicit refers to how the finite difference scheme is expressed:
• Sample parabolic equation, using forward& backward Euler method we get,
13
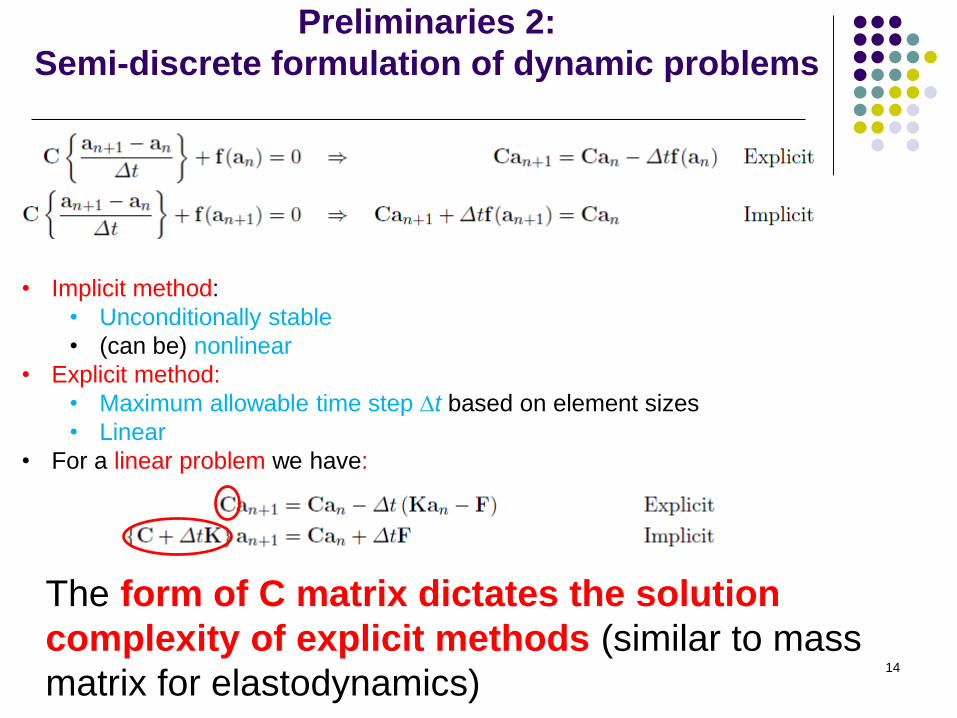
Preliminaries 2:
Semi-discrete formulation of dynamic problems
• Implicit method:
• Unconditionally stable
• (can be) nonlinear
• Explicit method:
• Maximum allowable time step Dt based on element sizes
• Linear
• For a linear problem we have:
The form of C matrix dictates the solution
complexity of explicit methods (similar to mass
matrix for elastodynamics)14
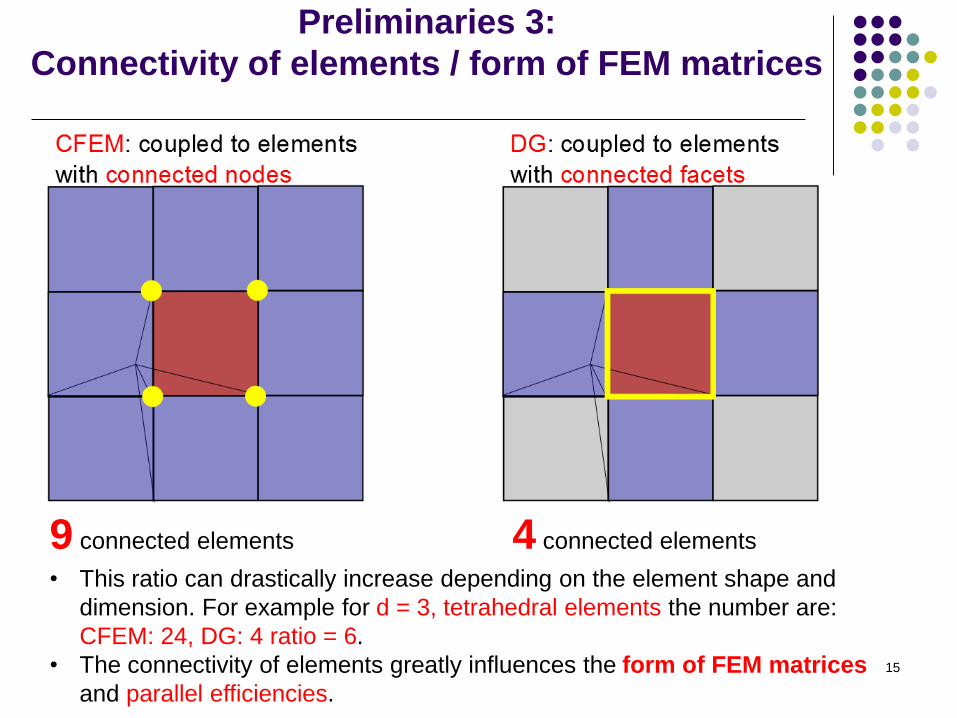
Preliminaries 3:
Connectivity of elements / form of FEM matrices
9 connected elements 4 connected elements
• This ratio can drastically increase depending on the element shape and
dimension. For example for d = 3, tetrahedral elements the number are:
CFEM: 24, DG: 4 ratio = 6.
• The connectivity of elements greatly influences the form of FEM matrices
and parallel efficiencies.
15
Comparison of CFEM and DG methods:• Advantages of CFEMs
• Preliminaries
• Advantages of DG methods
16
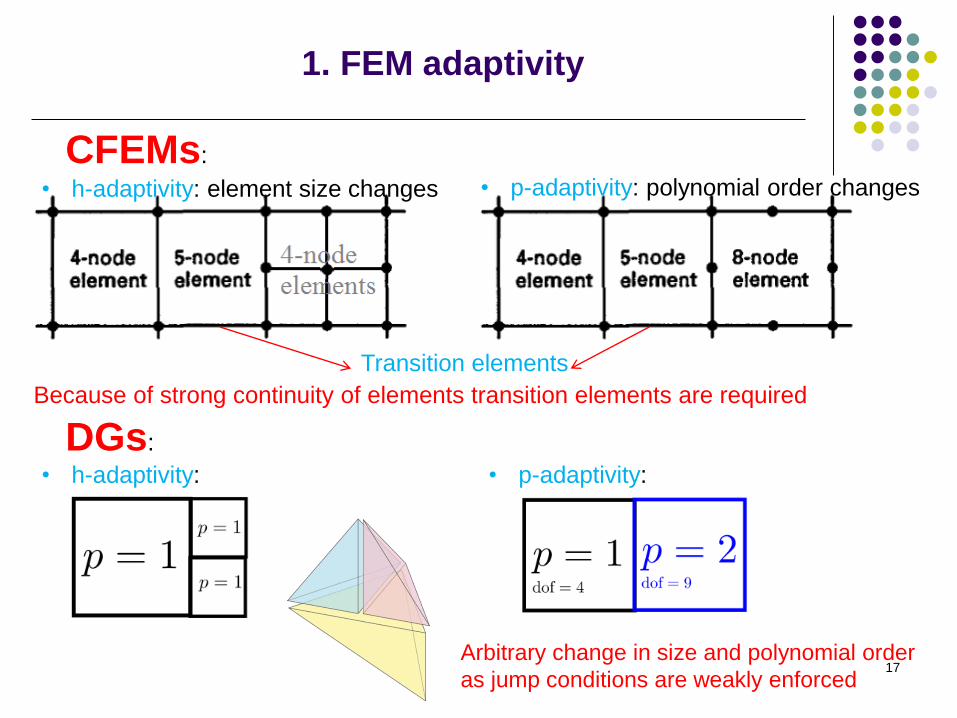
1. FEM adaptivity
CFEMs:
• h-adaptivity: element size changes • p-adaptivity: polynomial order changes
Transition elements
Because of strong continuity of elements transition elements are required
DGs:
• h-adaptivity: • p-adaptivity:
Arbitrary change in size and polynomial order
as jump conditions are weakly enforced17
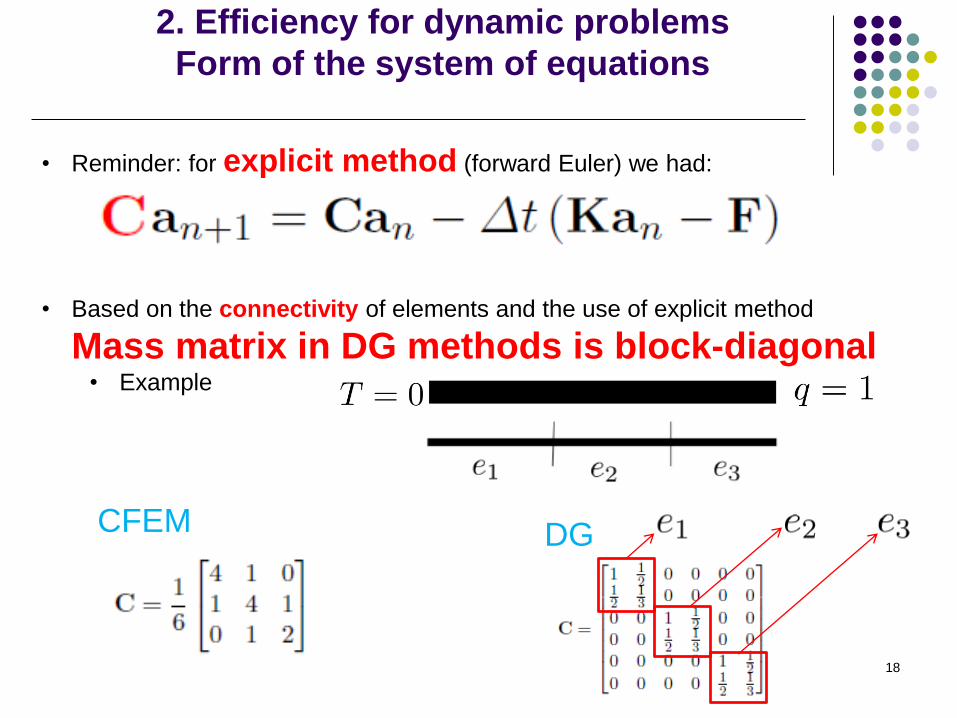
2. Efficiency for dynamic problems
Form of the system of equations
• Reminder: for explicit method (forward Euler) we had:
• Based on the connectivity of elements and the use of explicit method
Mass matrix in DG methods is block-diagonal• Example
CFEM DG
18
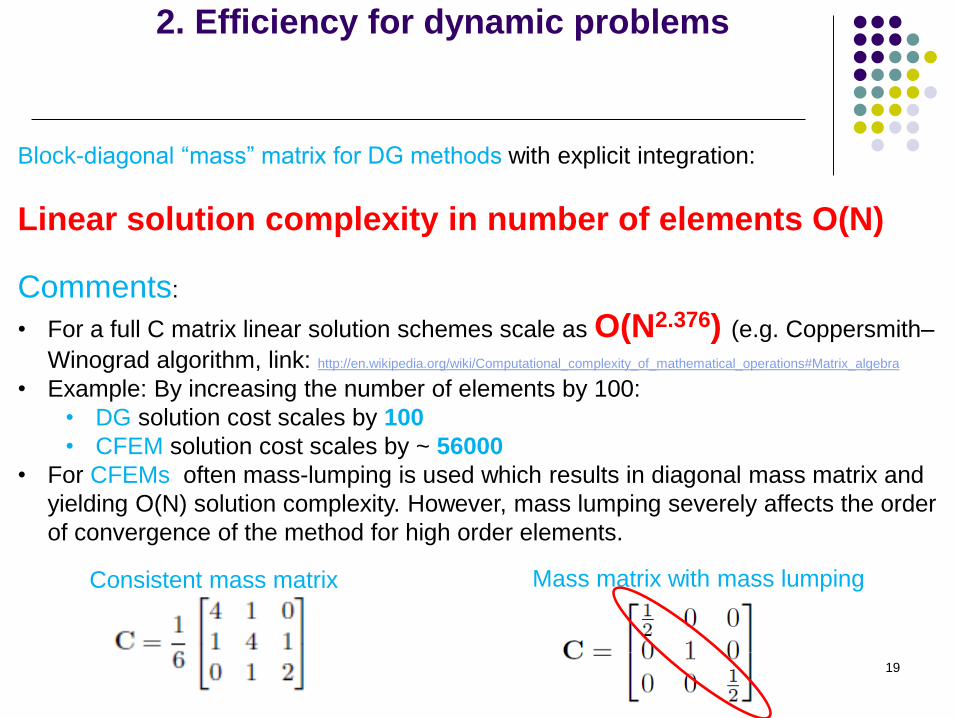
2. Efficiency for dynamic problems
Block-diagonal “mass” matrix for DG methods with explicit integration:
Linear solution complexity in number of elements O(N)
Comments:
• For a full C matrix linear solution schemes scale as O(N2.376) (e.g. Coppersmith–
Winograd algorithm, link: http://en.wikipedia.org/wiki/Computational_complexity_of_mathematical_operations#Matrix_algebra
• Example: By increasing the number of elements by 100:
• DG solution cost scales by 100
• CFEM solution cost scales by ~ 56000
• For CFEMs often mass-lumping is used which results in diagonal mass matrix and
yielding O(N) solution complexity. However, mass lumping severely affects the order
of convergence of the method for high order elements.
Consistent mass matrix Mass matrix with mass lumping
19
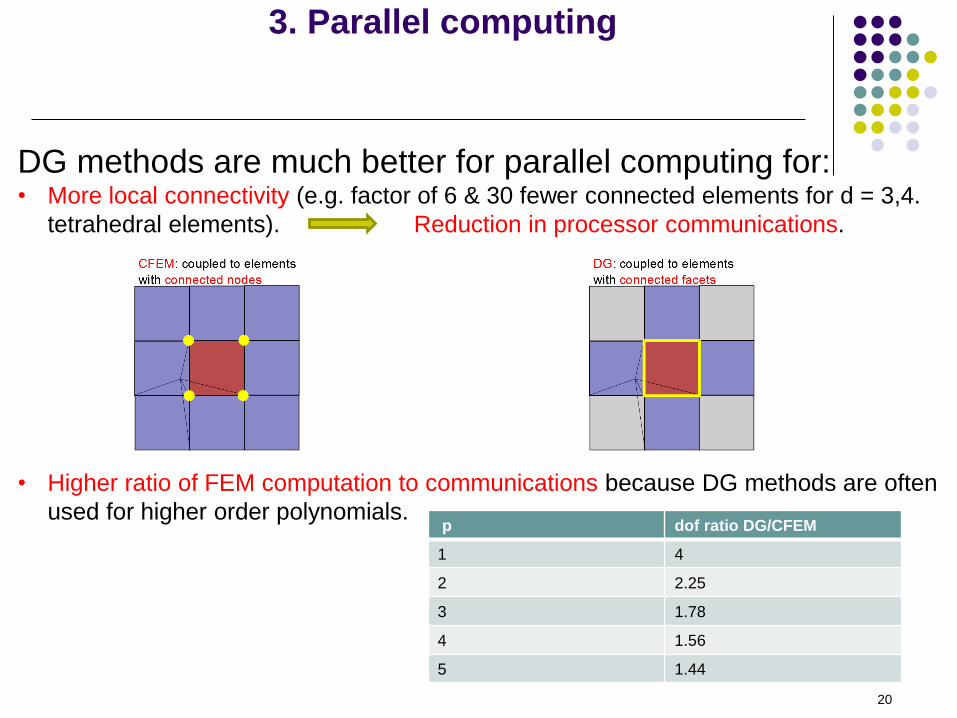
3. Parallel computing
DG methods are much better for parallel computing for:• More local connectivity (e.g. factor of 6 & 30 fewer connected elements for d = 3,4.
tetrahedral elements). Reduction in processor communications.
• Higher ratio of FEM computation to communications because DG methods are often
used for higher order polynomials.p dof ratio DG/CFEM
1 4
2 2.25
3 1.78
4 1.56
5 1.44
20
4. Resolving shocks and discontinuities for
hyperbolic problems
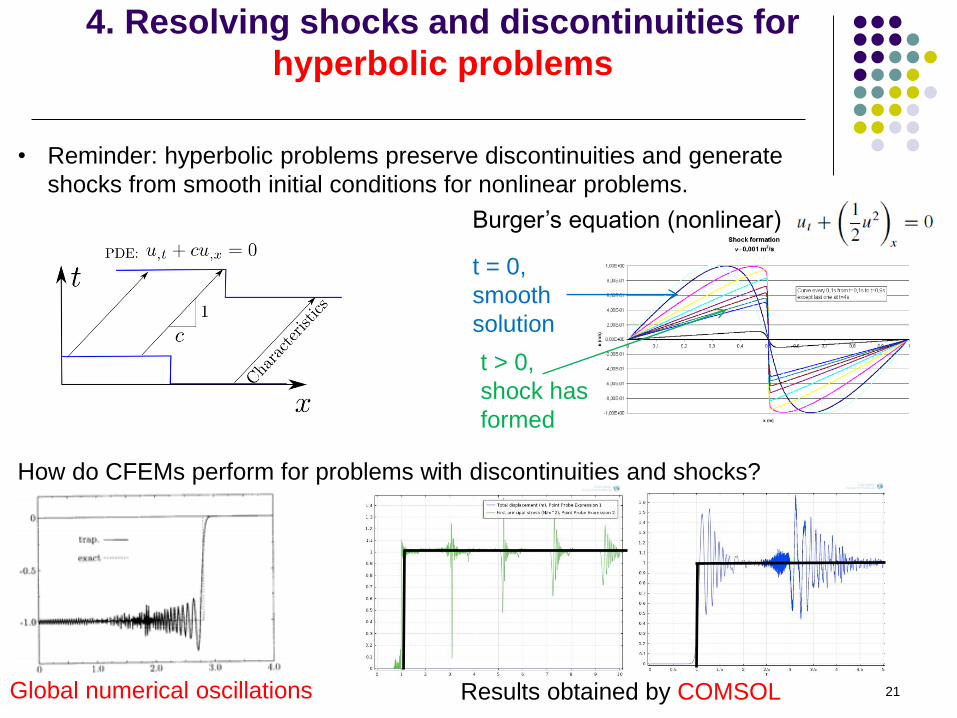
• Reminder: hyperbolic problems preserve discontinuities and generate
shocks from smooth initial conditions for nonlinear problems.
How do CFEMs perform for problems with discontinuities and shocks?
t = 0,
smooth
solution
t > 0,
shock has
formed
Burger’s equation (nonlinear)
Global numerical oscillations Results obtained by COMSOL 21
4. Resolving shocks and discontinuities for
hyperbolic problems
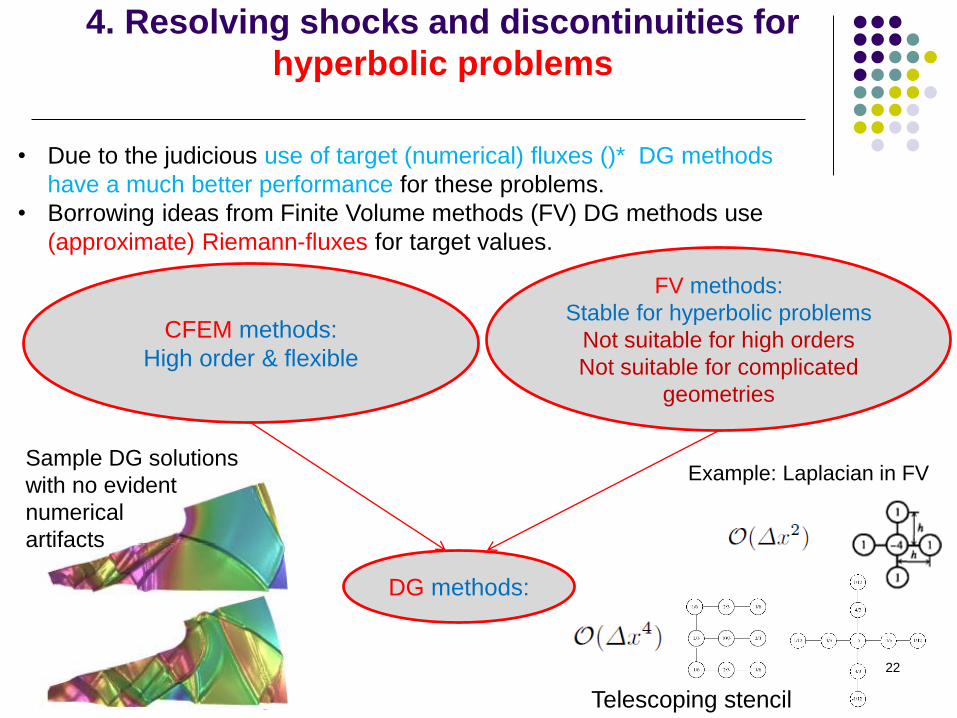
• Due to the judicious use of target (numerical) fluxes ()* DG methods
have a much better performance for these problems.
• Borrowing ideas from Finite Volume methods (FV) DG methods use
(approximate) Riemann-fluxes for target values.
CFEM methods:
High order & flexible
FV methods:
Stable for hyperbolic problems
Not suitable for high orders
Not suitable for complicated
geometries
DG methods:
Example: Laplacian in FV
Telescoping stencil
Sample DG solutions
with no evident
numerical
artifacts
22
5. Recovering balance laws at the element
level
Since the weight functions can be set to unity at each
individual element, balance properties can be recovered
at element level.
23
Advantages of DG methods:
1. FEM adaptivity
Resolving shocks and discontinuities for hyperbolic problems
Recovering balance laws at the element level
2. Efficiency /dynamic problems (block diagonal “mass” matrix)
3. Parallel computing (more local communication and
use of higher order elements with DG methods)
4. Superior performance for resolving
discontinuities (discrete solution space better resembles
the continuum solution space)
5. Can recover balance properties at the element level (vs global domain)
Disadvantages:
• Higher number of degrees of freedom:
• Particularly important for elliptic problems (global system is solved).
• Recently hybridizable DG methods (HDG), use Schur
decomposition (static condensation) to eliminate elements internal
dofs, making DG methods competitive or even better for elliptic
problems as well.
no transition
elements needed
Arbitrary
change in size
and polynomial
order
Summary of CFEMs and DG methods
24