Embed Size (px)
Citation preview
Collision Avoidance at Intersections in the Presence of Failures
Vladimir Savic, Elad M. Schiller and Marina Papatriantalou,
Computer Science and Engineering
Chalmers University of Technology
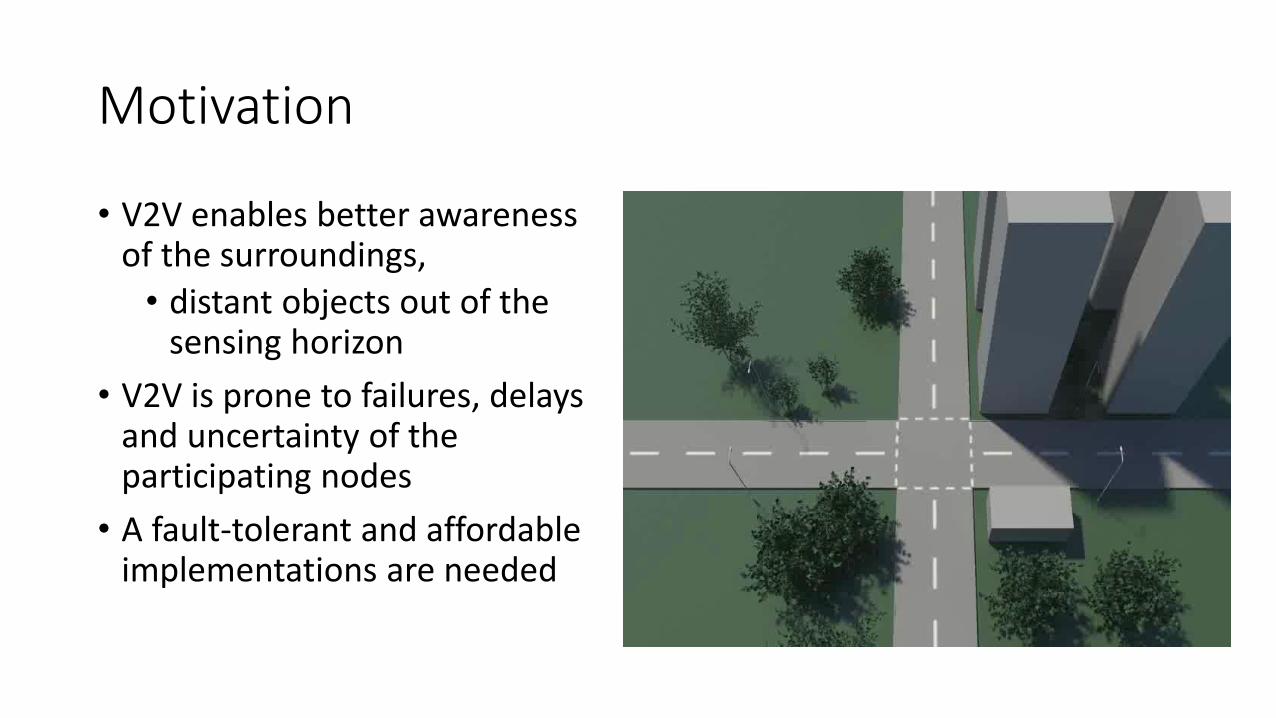
Motivation
• V2V enables better awareness of the surroundings,
• distant objects out of the sensing horizon
• V2V is prone to failures, delays and uncertainty of the participating nodes
• A fault-tolerant and affordable implementations are needed
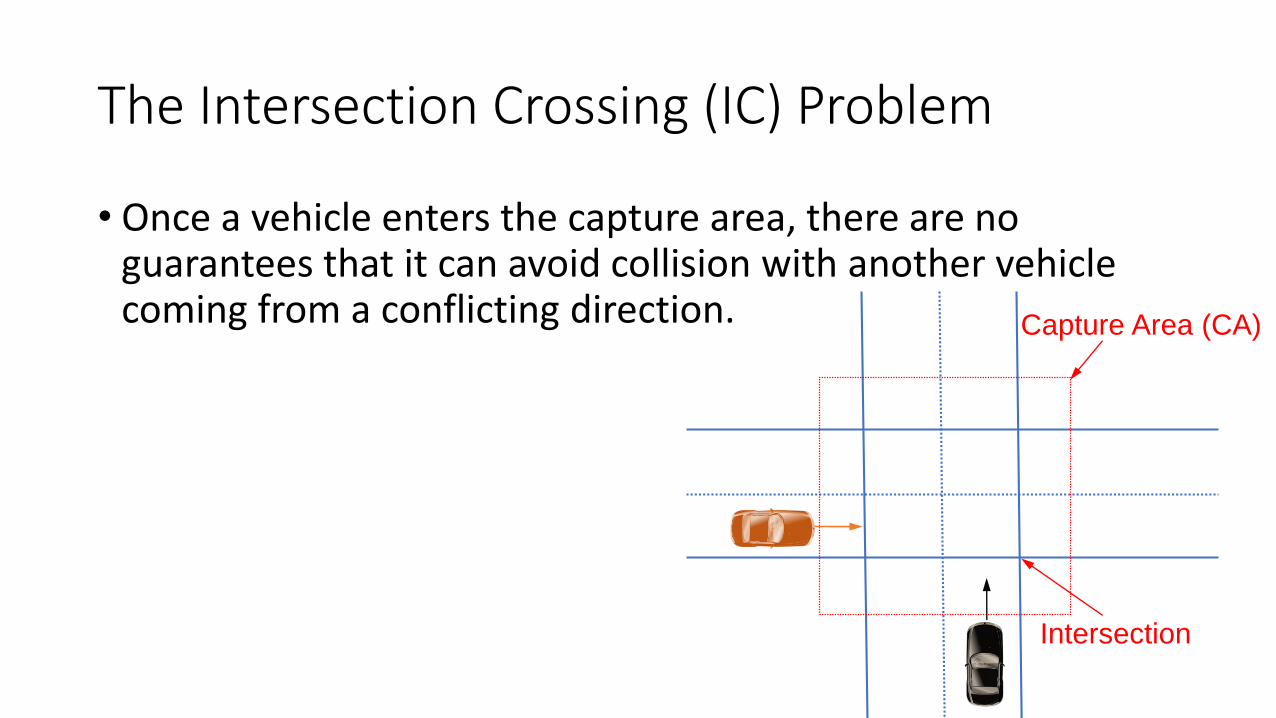
The Intersection Crossing (IC) Problem
• Once a vehicle enters the capture area, there are no guarantees that it can avoid collision with another vehicle coming from a conflicting direction. Capture Area (CA)
Intersection
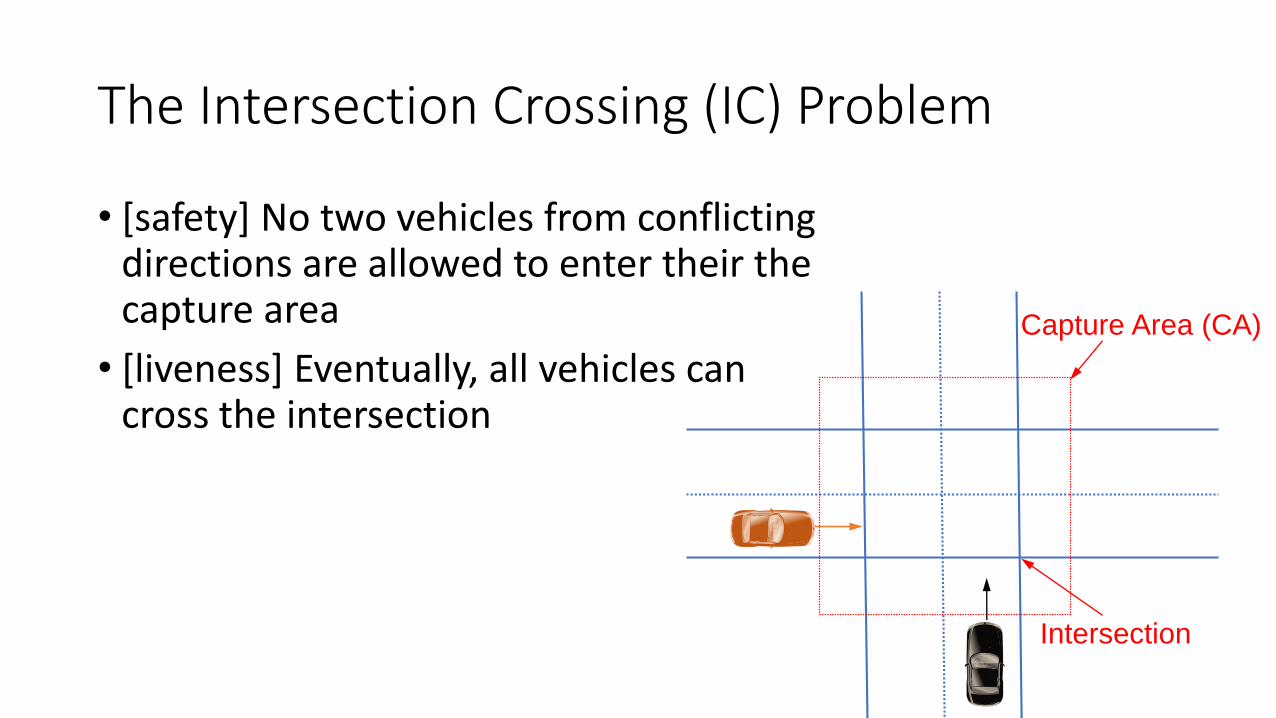
The Intersection Crossing (IC) Problem
• [safety] No two vehicles from conflicting directions are allowed to enter their the capture area
• [liveness] Eventually, all vehicles can cross the intersection
Capture Area (CA)
Intersection
Existing Solutions
Capture Area (CA)
Intersection
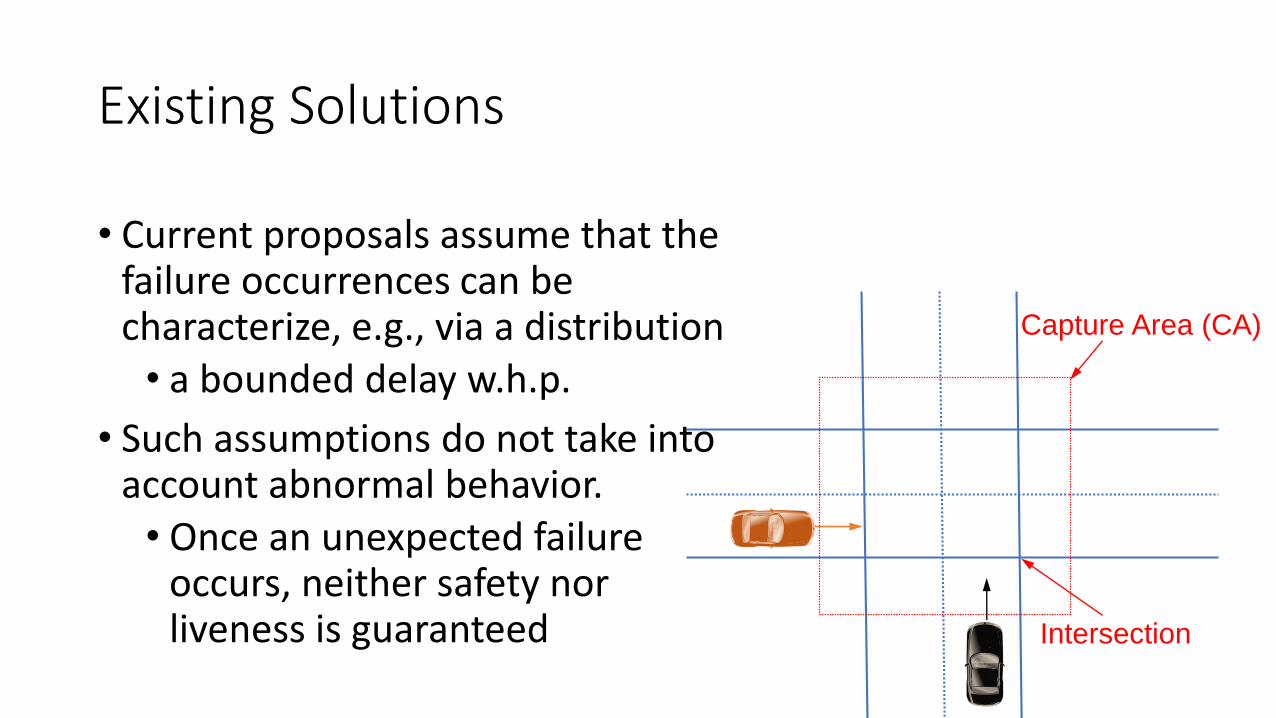
• Current proposals assume that the failure occurrences can be characterize, e.g., via a distribution• a bounded delay w.h.p.
• Such assumptions do not take into account abnormal behavior.• Once an unexpected failure
occurs, neither safety nor liveness is guaranteed
The Challenge
Capture Area (CA)
Intersection
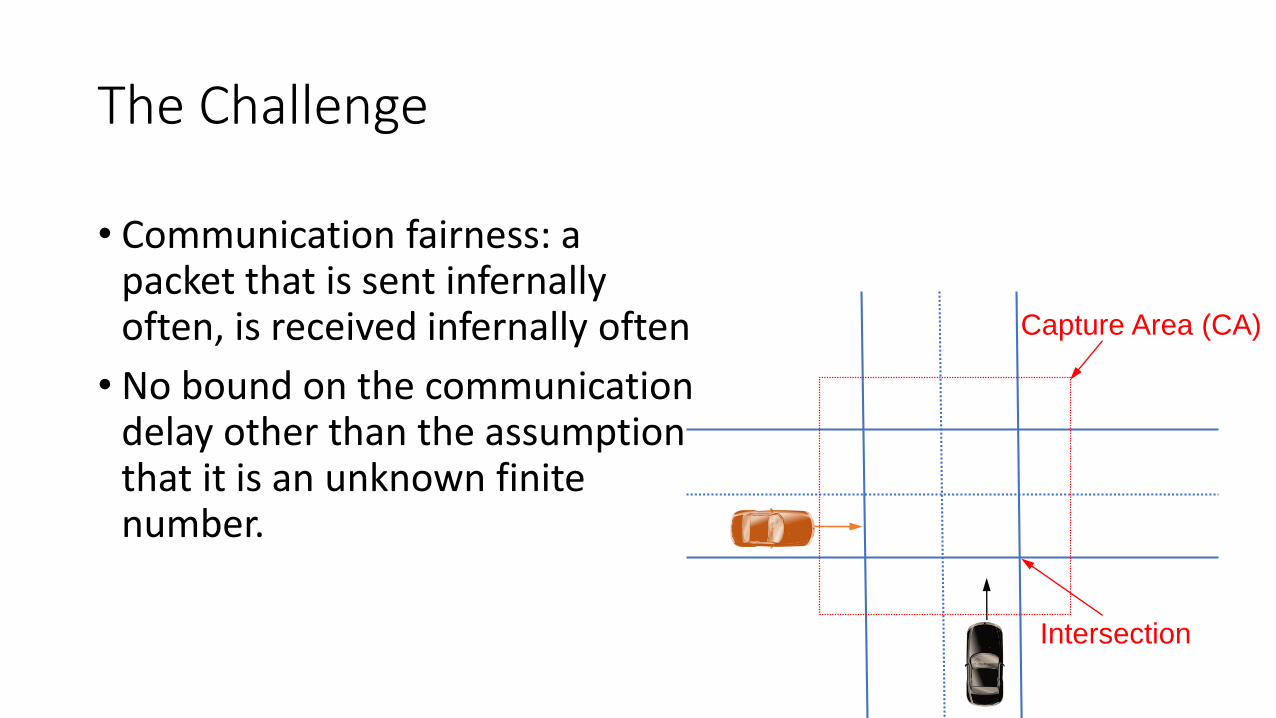
• Communication fairness: a packet that is sent infernally often, is received infernally often
• No bound on the communication delay other than the assumption that it is an unknown finite number.
Our Contribution
• We propose a solution to the intersection crossing (IC) problem with V2V communication.
• We handle any finite number of packet failures.
• We provide:
• Numerical simulations
• An analysis based on a time diagram
• According to our results, based on a real data set, the crossing delay is only slightly increased even in the presence of highly correlated failures.
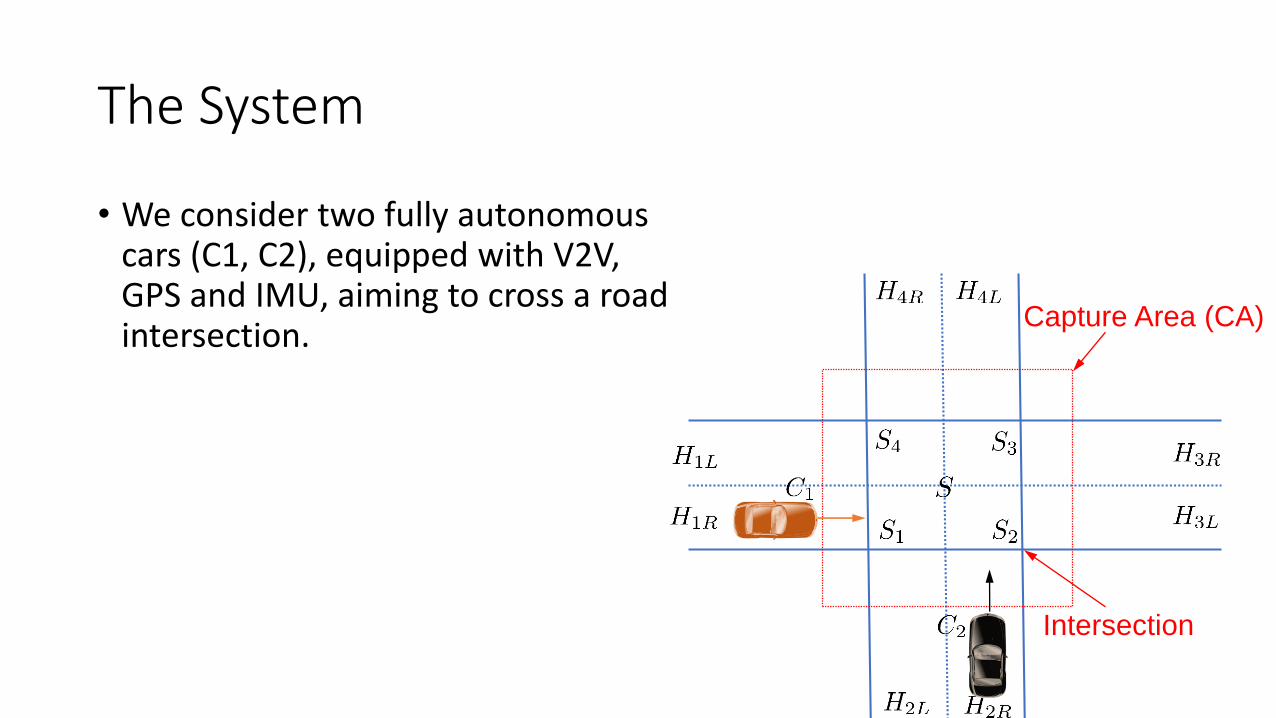
The System
• We consider two fully autonomous cars (C1, C2), equipped with V2V, GPS and IMU, aiming to cross a road intersection.
Capture Area (CA)
Intersection
The Protocol
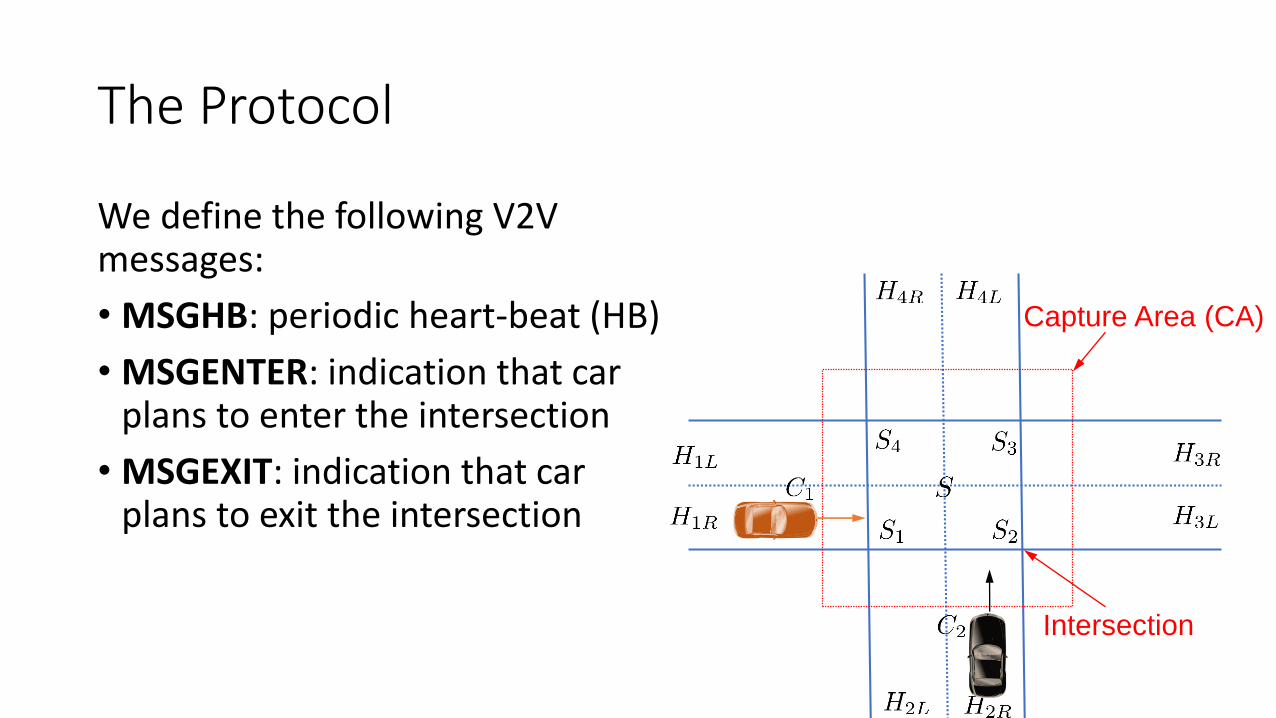
We define the following V2V messages:
•MSGHB: periodic heart-beat (HB)
•MSGENTER: indication that car plans to enter the intersection
•MSGEXIT: indication that car plans to exit the intersection
Capture Area (CA)
Intersection
The Protocol
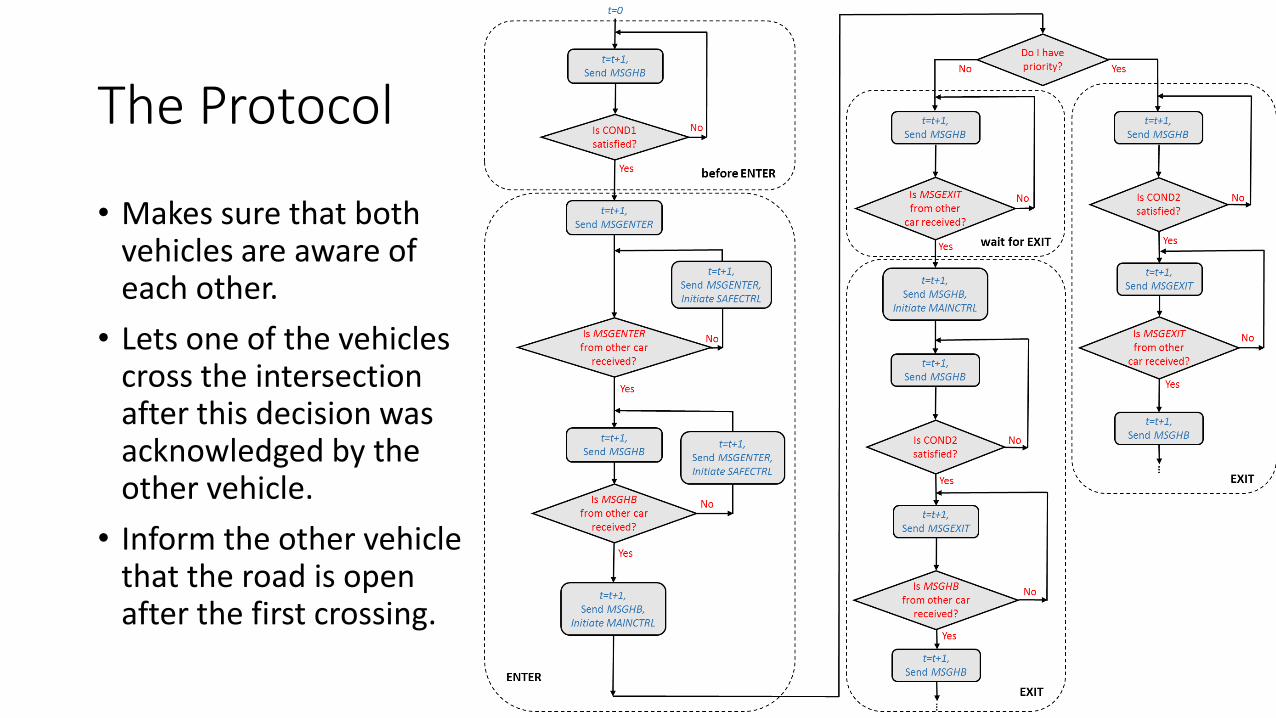
• Makes sure that both vehicles are aware of each other.
• Lets one of the vehicles cross the intersection after this decision was acknowledged by the other vehicle.
• Inform the other vehicle that the road is open after the first crossing.
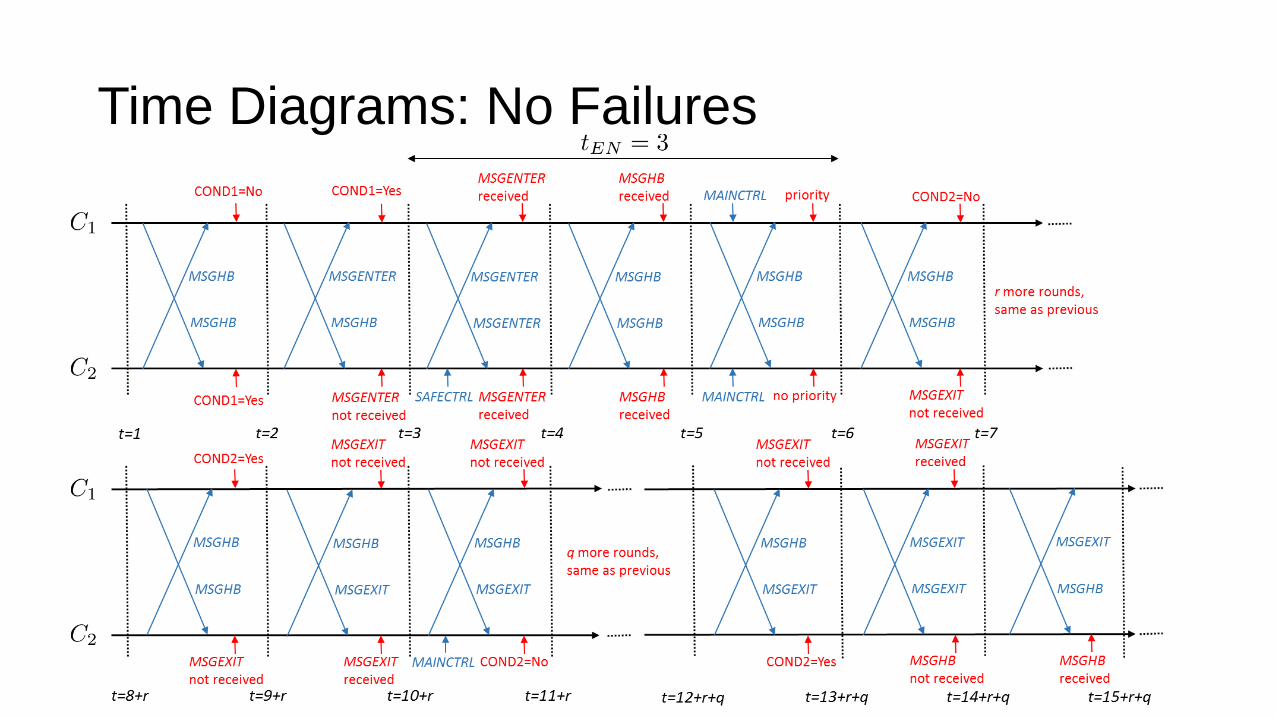
Time Diagrams: No Failures
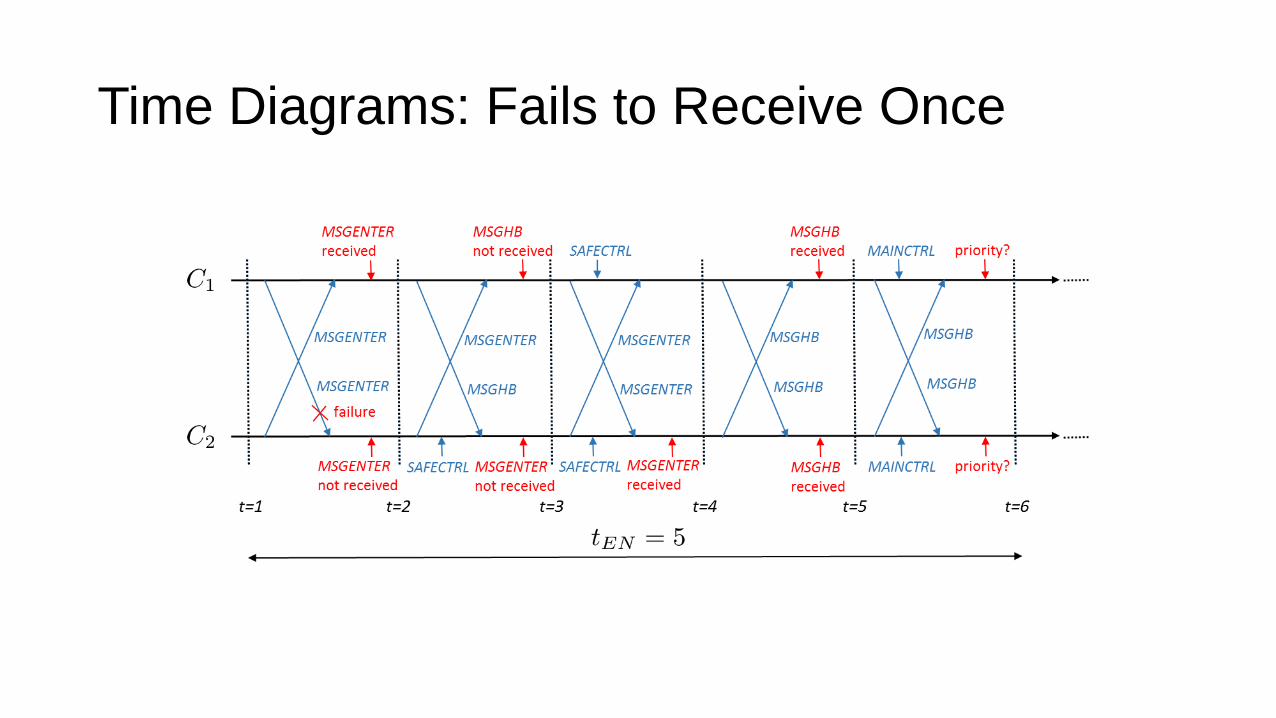
Time Diagrams: Fails to Receive Once
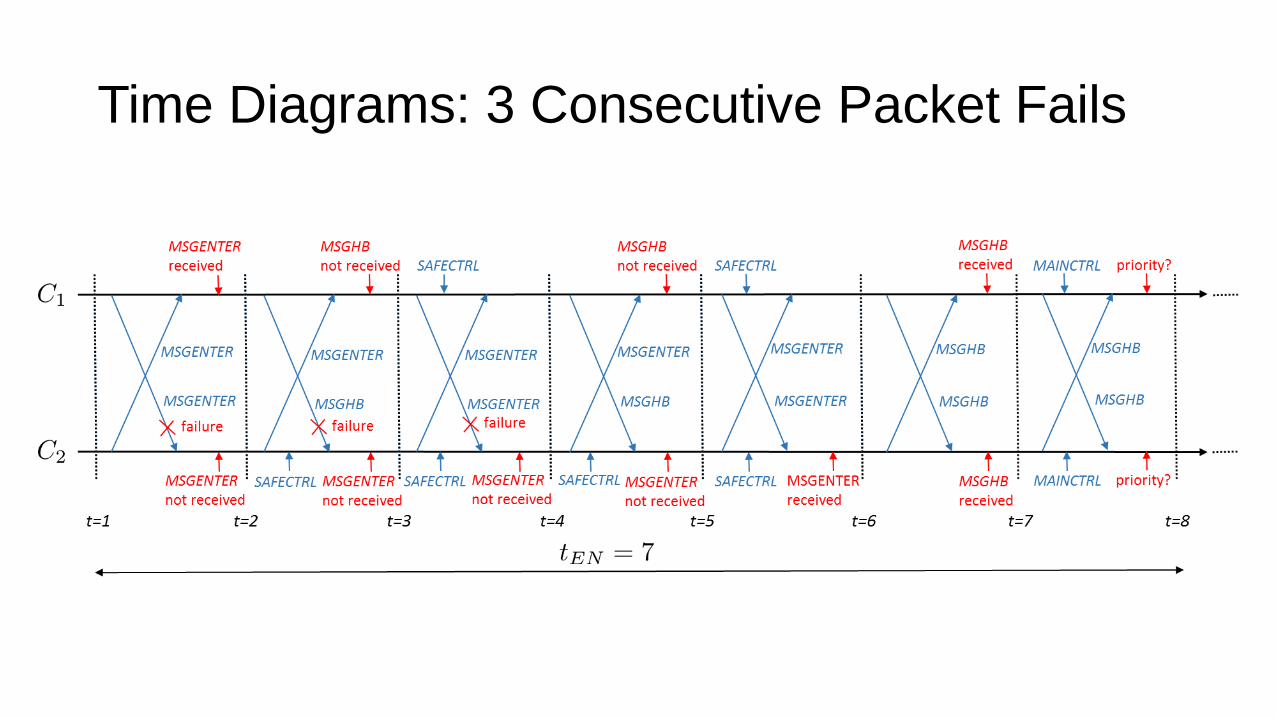
Time Diagrams: 3 Consecutive Packet Fails
Numerical simulations
• To analyze the delay caused by communication failures, we use the real measurements available in [1].
• Two scenarios:
• open-field (without any obstacles), and
• harsh (with many obstacles, such as tunnels and bridges)
[1] F. Bai, H. Krishnan, “Reliability analysis of DSRC wireless communication for vehicle safety applications,” in Proc. of IEEE Intelligent Transp. Systems Conf., Sept 2006.
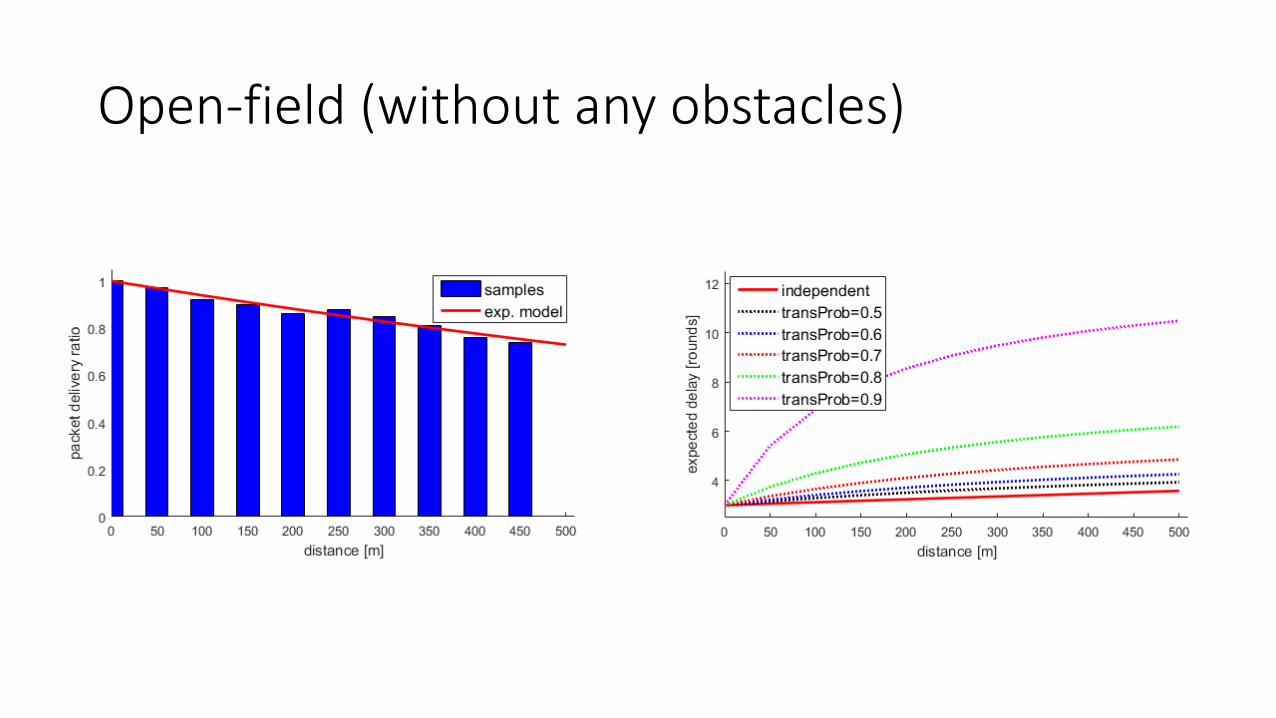
Open-field (without any obstacles)
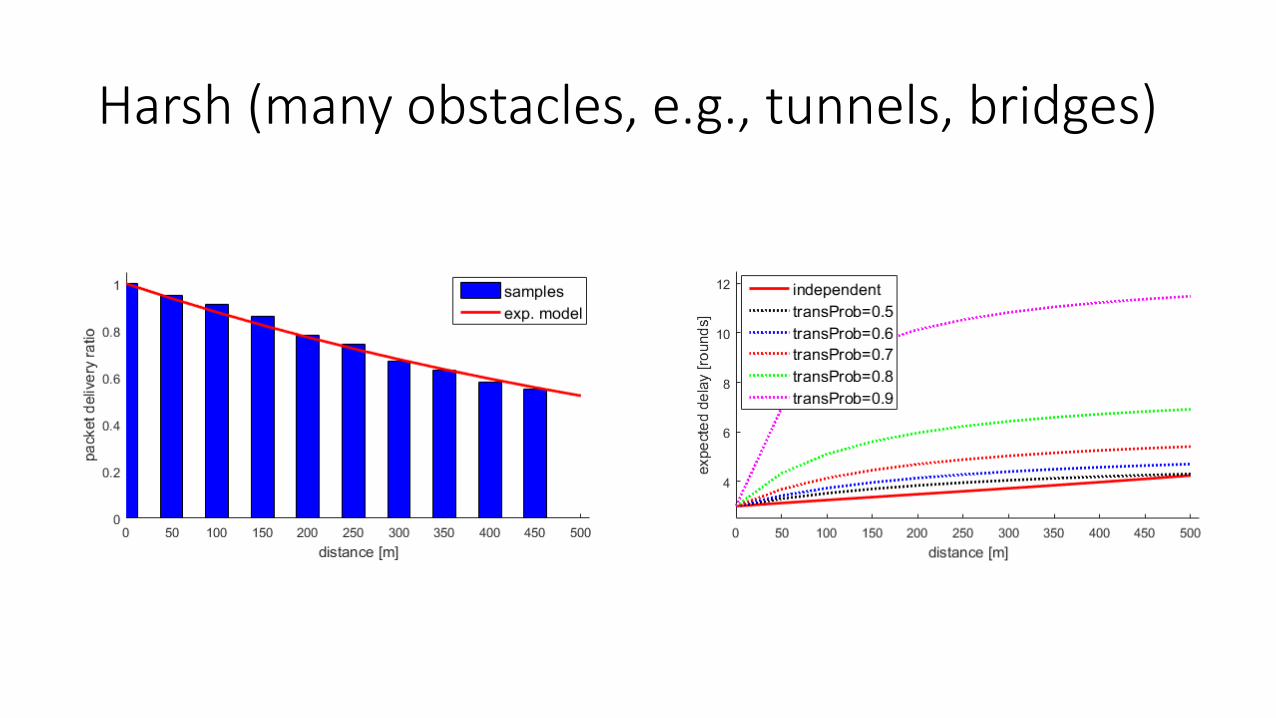
Harsh (many obstacles, e.g., tunnels, bridges)
Conclusions
• We proposed a technique for dealing with communication failures
• Using this technique, we device a fault-tolerant algorithm for intersection crossing
• We analyzed time diagrams and provided the numerical results in realistic situations that show that both safety and liveness are satisfied
Contact information
This presentation is based on a talked the Vladimir Savic gave in Intelligent Vehicles Symposium 2017: 1005-1012 with the title `Distributed algorithm for collision avoidance at road intersections in the presence of communication failures’
Contact person: Elad Michael Schiller
18