Embed Size (px)
Citation preview

CODED MASK IMAGING WITH ASTROSAT SCANNING SKY MONITOR (SSM)
Mask Design
Camera Simulation
Image Reconstruction 1-d 2-d, single camera 2-d, multiple camera continuous rotation
Sky Simulation
D. Bhattacharya & B.T. Ravishankar, RRI, Bangalore
Detector
MASK

CODED MASK IMAGING CONCEPT
Multiple pin-hole MASK
Mask casts shadow on detector plane
Shift of shadow pattern encodes source location
Cross correlation of mask pattern with shadow recovers shift and locates sources
Designed for pointed-mode observation

Mask Design Goals
1. Clean autocorrelation function (min. sidelobes)
2. Maximum transparency (photon collection)
Adopted
63-element pseudo-noise Hadamard Set URA
Six different patterns, one-dimensional coding
Open Fraction = 50%
Flat sidelobe response in cyclic autocorretation
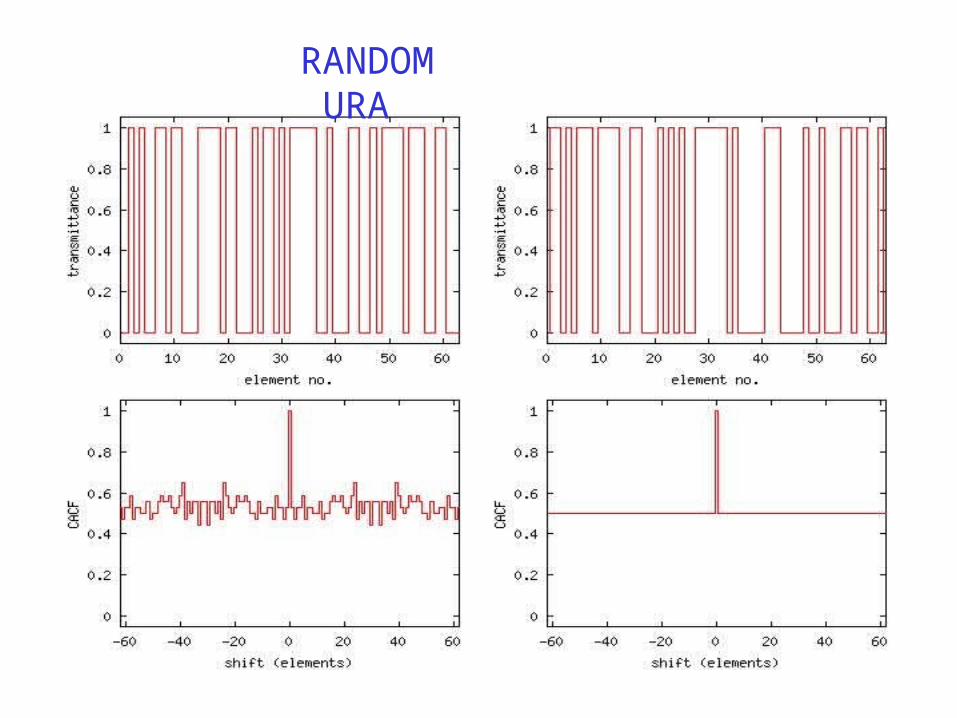
RANDOM URA

Six mask patterns for the SSM
Patterns joined side-by-side. Gives limited resolution in non-coded direction

Camera SimulationSet up Camera Geometry
Set up source locations (θx , θy within FOV)
Monte-Carlo simulate photon strikes on mask
Those striking open elements propagated into the camera
Photons striking the shield discarded
x-locations and wire nos. recorded for those striking the detector
Add position uncertainties due to finite resoln.
Add background noise
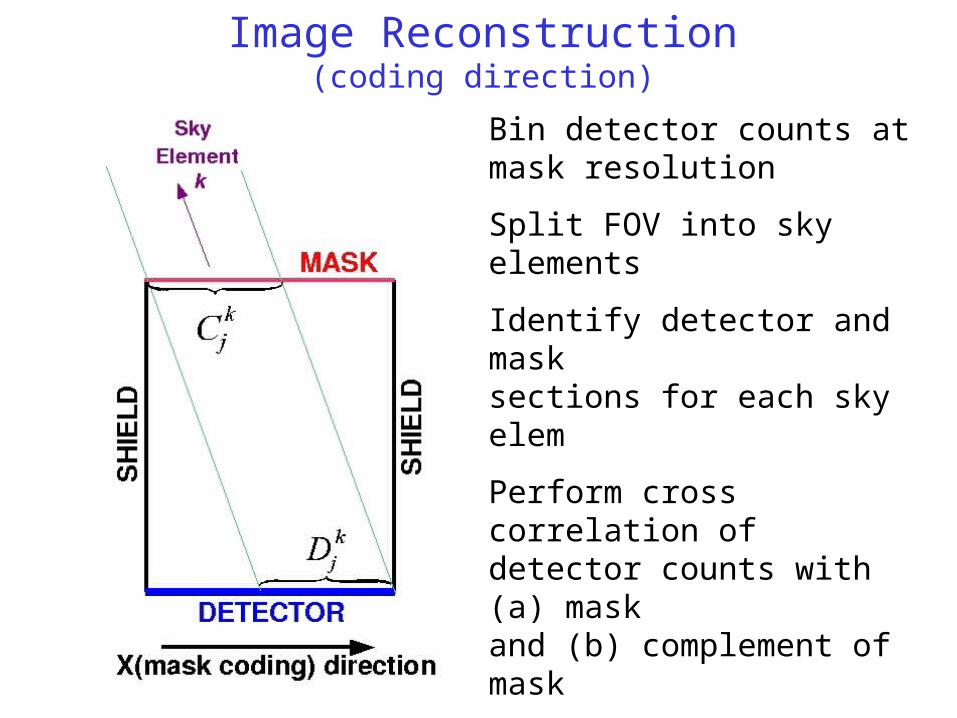
Image Reconstruction(coding direction)
Bin detector counts at mask resolution
Split FOV into sky elements
Identify detector and mask sections for each sky elem
Perform cross correlation ofdetector counts with (a) maskand (b) complement of mask
Diff. (a)-(b) yields source strength at that sky element
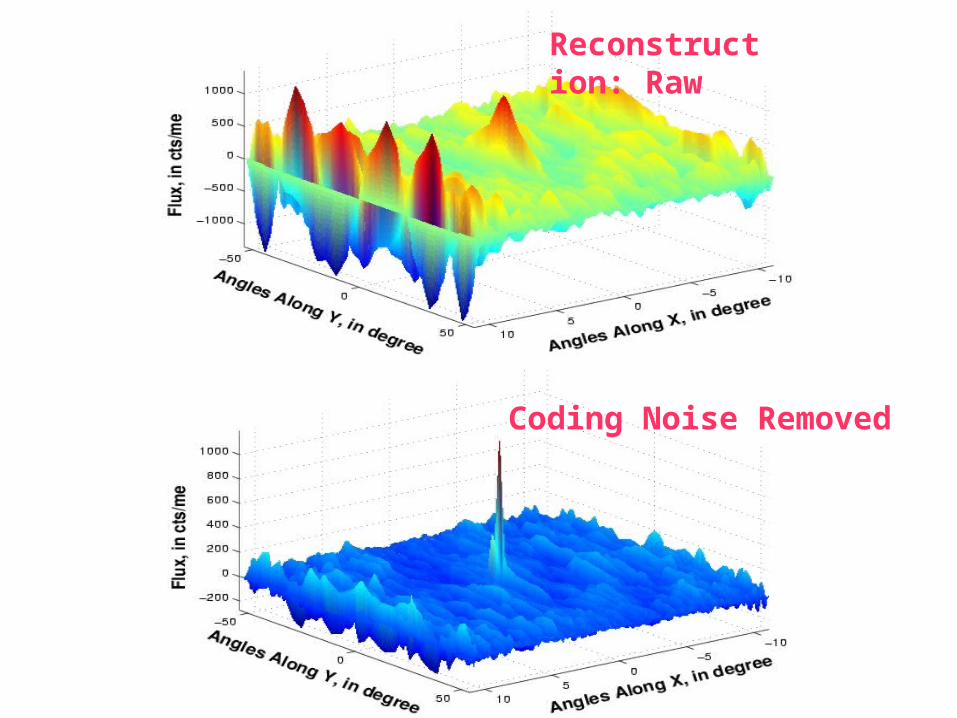
Coding Noise due to sky element cross-talk. Model and remove iteratively






Image Reconstruction(2-d, single camera)
6 mask patterns, 8 wires : 48 basic 1-d reconstructions
55 allowed combinations of these 48 reconstructions correspond to different source locations in the uncoded direction
Look for max. S/N among these 55 combinations, resulting in recognition of source location in uncoded direction
Final resolution (nominal): 10 arcmin x 2 deg
Eventual refined 2-d location by using 2 cameras with crossed FOV
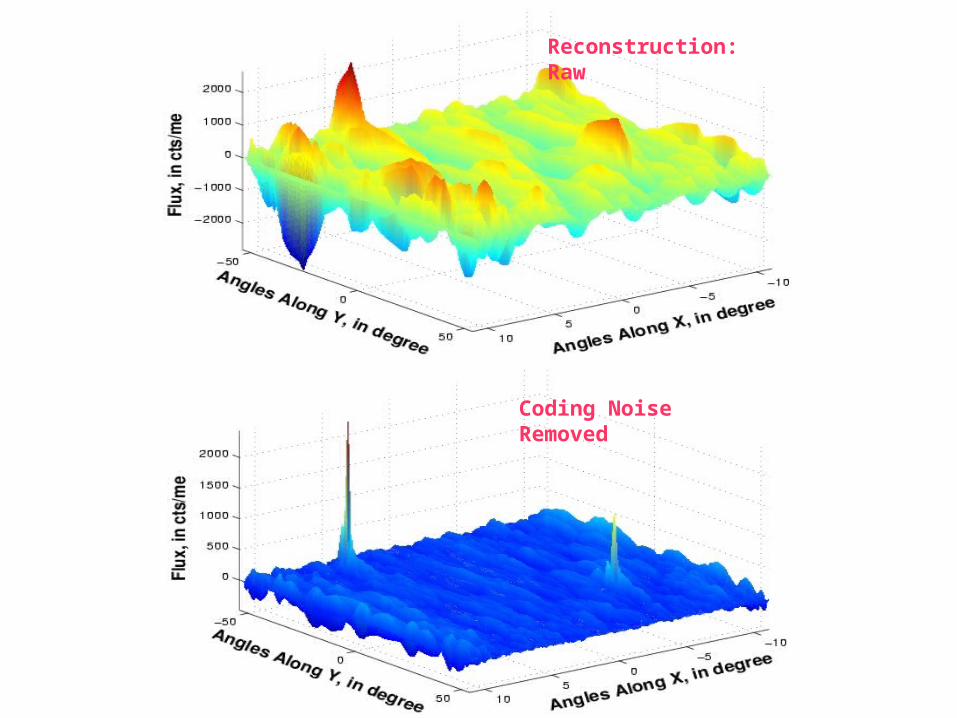
Reconstruction: Raw
Coding Noise Removed
ASTROSAT SSM Coded Mask Development:Present Status
Mask Design : Completed
Camera Simulation: Software developed, documented. Further refinements after fabrication.
Image Reconstruction 1-d: Basic software ready, including IROS. Documentated. Richardson-Lucy evaluation on. 2-d, single camera: Capability demonstrated. Effects of some non-idealities investigated. 2-d, multiple camera: Not yet taken up
Continuous rotation: Investigations started
Sky Simulation: Not yet taken up
ASTROSAT SSM Coded Mask Development:Next six months (April- September 2002)
Finalise current version of imaging software and complete documentation
Finish evaluation of Richardson-Lucy procedure
Devise reconstruction algorithms for continuously rotating camera. Investigate alternative camera design.
Begin development of tools for Sky Simulation
Current person-power: 1+1
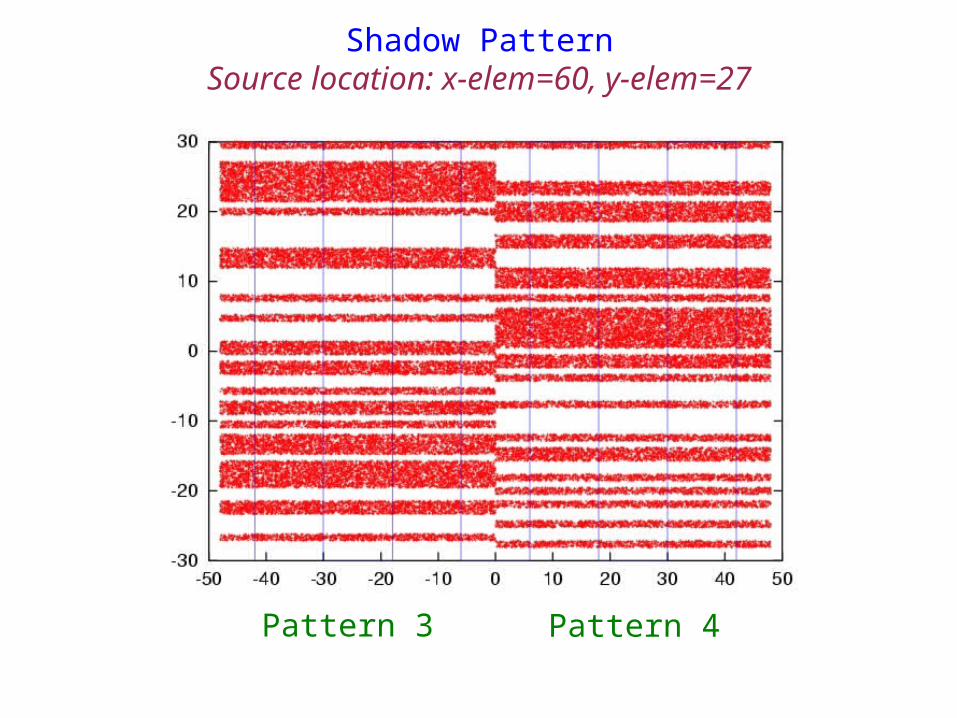
Shadow PatternSource location: x-elem=60, y-elem=27
Pattern 3 Pattern 4

Reconstruction: Raw
Coding Noise Removed