Embed Size (px)
Citation preview

MI Preprint SeriesMathematics for Industry
Kyushu University
Coalition Structure Generation
with Subadditivity Constraints
Naoyuki Kamiyama,
Akifumi Kira, Hirokazu Anai,
Hidenao Iwane & Kotaro Ohori
MI 2016-10
( Received August 8, 2016 )
Institute of Mathematics for IndustryGraduate School of Mathematics
Kyushu UniversityFukuoka, JAPAN

Coalition Structure Generation with Subadditivity Constraints
Naoyuki KAMIYAMAInstitute of Mathematics for Industry, Kyushu University
&JST PRESTO
Akifumi KIRAInstitute of Mathematics for Industry, Kyushu University
Hirokazu ANAI, Hidenao IWANE, and Kotaro OHORIKnowledge Information Processing Laboratory, Fujitsu Laboratories Ltd.
Abstract
Coalition structure generation is one of the most fundamental problems in the study of computationalaspects of cooperative games. The goal of this problem is to partition the ground set of a given cooperativegame in such a way that a certain property is satisfied. For example, one of typical goals is to find apartition that minimizes the sum of costs of all coalitions. In this paper, we introduce the problem offinding a minimum-size partition of the ground set such that a subgame on each coalition is subadditive.The contribution of this paper is twofold. In the first part of this paper, we consider this problem fromthe theoretical viewpoint. In this part, we prove that our problem in the minimum base game on matroidsintroduced by Nagamochi, Zeng, Kabutoya, and Ibaraki can be solved in polynomial time. In the secondpart, we study our problem from the practical viewpoint. In this part, we first propose heuristic algorithmsfor our problem in a general cooperative game. Our algorithms are based on heuristic algorithms for theset cover problem. Then, we apply our algorithms to the problem of sharing taxis that is our originalmotivation. More precisely, we consider the problem of partitioning customers for taxis in such a waythat customers in each group have incentive for sharing a taxi.
Keywords Coalition structure generation, matroid, column generation, taxi sharing.
1 Introduction
A cooperative game Γ = (N, v) is a pair of a finite set N of players and a characteristic function v : 2N → Rsuch that v(∅) = 0, where we denote by R the set of real numbers. One of the most fundamental problemsin computational aspects of cooperative games is coalition structure generation (see, e.g., [1, Chapter 6]for a survey of coalition structure generation). The goal of this problem is to partition the ground set ofa given cooperative game in such a way that a certain property is satisfied. For example, one of typicalgoals is to find a partition that minimizes the sum of costs of all coalitions. Several variations of coalition
1

structure generation problems (e.g., a min-max type criterion) are considered in various fields (see, e.g.,[2, 3, 4, 5, 6, 7]).
In this paper, we introduce the problem of finding a minimum-size partition of the ground set such thata subgame on each coalition is subadditive. A cooperative game Γ = (N, v) is said to be subadditive, ifv(X ∪Y ) ≤ v(X)+v(Y ) for every pair of disjoint subsets X,Y of N . If a cooperative game is subadditive,then it is natural to assume that the agents form the grand coalition since the cost decreases by gettingtogether. Once the grand coalition is formed, we can use known solution concepts for sharing the cost. Thus,the subadditivity is one of fundamental properties that a cooperative game should satisfy.
1.1 Problem formulation
For each cooperative game Γ = (N, v), a partition N1, N2, . . . , Nk of N is called a feasible partition of Γ,if the cooperative game (Nt, v|Nt) is subadditive for every t = 1, 2, . . . , k, where v|Nt is the restriction of vto Nt. Then, the COALITION STRUCTURE GENERATION WITH SUBADDITIVITY CONSTRAINTS problem(CSGS for short) is formally defined as follows. In this problem, we are given a cooperative game Γ = (N, v).Then, the goal of this problem is to find a feasible partition P of Γ that minimizes |P| among all feasiblepartitions of Γ. Notice that for every cooperative game Γ = (N, v), since a family of {i} for all elementsi in N is a feasible partition of Γ, there always exists a solution of CSGS. Furthermore, it should be notedthat since the problem of checking the subadditivity of a cooperative game is computationally hard, ourproblem is also computationally hard. For example, Greco, Malizia, Palopoli, and Scarcello [8] prove thatthe special case of the variant of CSGS in which we decide whether its optimal objective value is equal toone is coNP-complete. Although CSGS is natural, to the best of our knowledge, this problem has not beeninvestigated.
In practical settings, it may be desirable that the size of each subset in a partition is bounded by someupper bound (e.g., a capacity of a taxi in our application). We will consider the following variant of CSGS.In this variant, we are given a cooperative game Γ = (N, v) and a positive integer ℓ. A feasible partitionP of Γ is called an ℓ-bounded feasible partition of Γ, if |X| ≤ ℓ for every member X in P . Then, ourgoal is an ℓ-bounded feasible partition P of Γ that minimizes |P| among all ℓ-bounded feasible partitionsof Γ. We call this problem the COALITION STRUCTURE GENERATION WITH SUBADDITIVITY AND SIZE
CONSTRAINTS problem (CSGSS for short).
1.2 Our contributions
The contribution of this paper is twofold. Our contributions are summarized as follows.
• In Section 2, we study CSGS from the theoretical viewpoint. Since the problem of checking the sub-additivity of a general cooperative game is hard, our problem is also computationally hard. Thus, itis a natural direction to find subclasses of cooperative games in which our problem can be efficientlysolved. The main contribution of this part is the polynomial-time solvability of CSGS and its variantsin the minimum base game on matroids introduced by Nagamochi, Zeng, Kabutoya, and Ibaraki [9].
• In Section 3, we study our problem from the practical viewpoint. In this part, we first propose heuristicalgorithms for CSGS in a general cooperative game. Our algorithms are based on heuristic algorithmsfor the set cover problem. Then, we apply our algorithms to the problem of sharing taxis that is ouroriginal motivation. More precisely, we consider the problem of partitioning customers for taxis insuch a way that customers in each group have incentive for sharing a taxi.
2

2 Polynomial-Time Algorithms for the Minimum Base Game on Matroids
In this section, we prove that CSGS in the minimum base game on matroids can be solved in polynomialtime (Section 2.2). Furthermore, we prove that its variant with size constraints (Section 2.3) and a similarproblem related to a core (Section 2.4) can be solved in polynomial time.
2.1 Basics of Matroids
Here we give basics of matroids. See, e.g., [10] for more information about matroids. A pair M = (U, I) ofa finite set U and a family I of subsets of U is called a matroid, if it satisfies the following three conditions.
(I0) ∅ ∈ I.
(I1) For every pair of subsets X,Y of U such that X ⊆ Y , if Y ∈ I, then X ∈ I.
(I2) For every pair of members X,Y in I such that |X| < |Y |, there exists an element u in Y \X such thatX ∪ {u} ∈ I.
When we consider a problem in which some matroid M = (U, I) is given as an input, we assume that weare given a polynomial-time independence oracle. That is, we are not directly given the family I. Instead,for every subset X of U , we can check whether X ∈ I in polynomial time. That is, the polynomial-timesolvability of some problem related to a matroid M = (U, I) means that we can solve this problem in timebounded by a polynomial in |U | and the number of calls of an independence oracle for I. Notice that thecondition (I2) implies that for a given matroid M = (U, I), the size of every maximal member X in I (i.e,X ⊆ Y for any member Y in I) is the same, and we can find a maximum-size member in I in polynomialtime.
For each matroid M = (U, I), we define B(M) the set of maximal members in I. For each matroidM = (U, I) and each subset X of U , we define I|X as the family of subsets I of X such that I ∈ I, andM|X := (X, I|X). It is known [10] that M|X is a matroid. For each matroid M = (U, I) and each positiveinteger k, we define Ik as the family of subsets X of U such that there exists a partition X1, X2, . . . , Xk ofX such that Xt ∈ I for every t = 1, 2, . . . , k. Furthermore, for each matroid M = (U, I) and each positiveinteger k, we define Mk := (U, Ik). It is known [10] that Mk is a matroid. The following theorem plays animportant role in our algorithms.
Theorem 1 (See, e.g., [11, 12]). For every matroid M = (U, I) and every positive integer k, we can find amaximum-size member I∗ in Ik and a partition I1, I2, . . . , Ik of I∗ such that It ∈ I for every t = 1, 2, . . . , kin polynomial time.
Assume that we are given a matroid M = (U, I) and a positive integer ℓ. Then, we define the ℓ-truncation I ′ of I as the set of members I in I such that |I| ≤ ℓ. We define the ℓ-truncation M′ of M byM′ := (U, I ′). It is well known [10] that the ℓ-truncation of M is a matroid.
2.2 The Minimum Base Game on Matroids
In this subsection, we first formally define the minimum base game on matroids, and then we prove thatCSGS in the minimum base game on matroids can be solved in polynomial time.
For each matroid M = (U, I) and each function w : U → R, we define a function ρwM : 2U → R by
ρwM(X) := minY ∈B(M|X)
∑u∈Y
w(u).
3

For each matroid M = (U, I) and each function w : U → R, the minimum base game [9] on the matroid Mwith the cost function w is defined as the cooperative game (U, ρwM).
Here we give an example of the minimum base game, called the minimum spanning tree game [9].Assume that we are given an undirected graph G = (V,E) and a cost function c : E → R. A subset F of Eis called a forest in G, if no cycle is contained in F . Let F be the family of forests in G. For each subset Xof E, we define F∗(X) as the set of forests F such that (i) F ⊆ X and (ii) there exists no forest F ′ such thatF ⊊ F ′ ⊆ X . That is, F∗(X) is the family of maximal forests contained in X . Then, we define a functionπ : 2E → R by
π(X) := minF∈F∗(X)
∑e∈F
c(e).
The minimum spanning tree game is defined as the cooperative game (E, π). This game can be representedby the minimum base game on matroids as follows. It is well known [10] that MG = (E,F) is a matroid.Furthermore, it is not difficult to see that for every subset X of E, we have B(MG|X) = F∗(X). Thus,the minimum spanning tree game is equivalent to the minimum base game on the matroid MG with the costfunction c.
For proposing a polynomial-time algorithm for CSGS in the minimum base game on matroids, we firstgive necessary facts.
Lemma 2. For every matroid M = (U, I) and every subset X of U , the cooperative game (X, ρwM|X) isequal to the minimum base game on M|X with the cost function w|X .
Proof. Assume that we are given a matroid M = (U, I) and a subset X of U . It is not difficult to see thatfor every subset Y of X , we have (M|X)|Y = M|Y . This implies that for every subset Y of X , we have
ρwM|X(Y ) = ρwM(Y ) = minZ∈B(M|Y )
∑u∈Z
w(u)
= minZ∈B((M|X)|Y )
∑u∈Z
w(u) = ρw|XM|X(Y ).
This completes the proof.
Theorem 3 (Nagamochi, Zeng, Kabutoya, and Ibaraki [9, Corollary 3.1]). Assume that we are given amatroid M = (U, I) and a function w : U → R. Then, the minimum base game on the matroid M with thecost function w is subadditive if and only if
{u ∈ U | w(u) < 0} ∈ I.
For each matroid M = (U, I), each function w : U → R, and each positive integer k, we define thedecision version of CSGS in the minimum base game on the matroid M with the cost function w as theproblem of deciding whether there exists a feasible partition P of the minimum base game on the matroidM with the cost function w such that |P| = k, and find such a partition if one exists. If we can solvethis decision version in polynomial time, then we can solve CSGS in the minimum base game on matroidsin polynomial time by solving the decision version O(log |U |) times. In what follows, we prove that thedecision version can be solved in polynomial time by using the following Algorithm 1.
4

Algorithm 1
Step 1. Set ∆ := {u ∈ U | w(u) < 0}.
Step 2. Find a maximum-size member I∗ in (I|∆)k.
Step 3. If |I∗| < |∆|, then output null and halt (that is, there exists no feasible partition P of the minimumbase game on the matroid M with the cost function w such that |P| = k). Otherwise, go to Step 4.
Step 4. Find a partition I1, I2, . . . , Ik of I∗ such that It ∈ I for every t = 1, 2, . . . , k.
Step 5. Partition U \∆ into J1, J2, . . . , Jk.
Step 6. Set Ut := It ∪ Jt for each t = 1, 2, . . . , k.
Step 7. Output a family U1, U2, . . . , Uk and halt.
End of Algorithm
Lemma 4. For every matroid M = (U, I), every function w : U → R, and every positive integer k, thedecision version of CSGS in the minimum base game on the matroid M with the cost function w can besolved in polynomial time by using Algorithm 1.
Proof. Since it follows from Theorem 1 that Algorithm 1 can be implemented in polynomial time, it sufficesto prove its correctness. Assume that there exists a feasible partition N1, N2, . . . , Nk of the minimum basegame on the matroid M with the cost function w. That is, the cooperative game (Nt, ρ
wM|Nt) is subadditive
for every t = 1, 2, . . . , k. Then, Lemma 2 implies that the minimum base game on the matroid M|Nt
with the cost function w|Nt is subadditive. Theorem 3 implies that Nt ∩ ∆ is in I|Nt, i.e., I for everyt = 1, 2, . . . , k. Thus, ∆ (= ∪k
t=1(Nt ∩∆)) is in Ik, i.e., (I|∆)k. Furthermore, ∆ is clearly a maximum-size member in (I|∆)k. Thus, if Algorithm 1 outputs null, then there exists no feasible partition P of theminimum base game on the matroid M with the cost function w such that |P| = k.
Next we consider the case where Algorithm 1 outputs a family U1, U2, . . . , Uk. Since |I∗| = |∆| andI∗ ⊆ ∆, we have I∗ = ∆. Thus, the family U1, U2, . . . , Uk is a partition of U . Furthermore, for everyt = 1, 2, . . . , k, since Ut ∩ ∆ = It holds, Ut ∩ ∆ is in I. Thus, Theorem 3 implies that the minimumbase game on the matroid M|Ut with the cost function w|Ut is subadditive. This and Lemma 2 imply thatthe family U1, U2, . . . , Uk is a feasible partition of the minimum base game on the matroid M with the costfunction w. This completes the proof.
Lemma 4 and the argument above Algorithm 1 imply the following theorem.
Theorem 5. Assume that we are given a matroid M = (U, I) and a function w : U → R. Then, CSGS in theminimum base game on the matroid M with the cost function w can be solved in polynomial time.
2.3 Size Constraints
In this subsection, we consider CSGSS in the minimum base game on matroids. Assume that we are givena matroid M = (U, I), a function w : U → R, and a positive integer ℓ. As in the case of CSGSS in theminimum base game on matroids, it is suffice to prove that the decision version of CSGSS in the minimumbase game on matroids (i.e., the problem of deciding whether there exists an ℓ-bounded feasible partition Pof CSGSS in the minimum base game on the matroid M and the cost function w such that |P| = k). Thisproblem can be solved by using the following Algorithm 2.
5

Algorithm 2
Step 1. If |U | > kℓ, then output null and halt (that is, there exists no ℓ-bounded feasible partition P ofCSGSS in the minimum base game on the matroid M and the cost function w such that |P| = k).Otherwise, go to Step 2.
Step 2. Set ∆ := {u ∈ U | w(u) < 0}.
Step 3. Let I ′ be the ℓ-truncation of I. Then, find a maximum-size member I∗ in (I ′|∆)k,
Step 4. If |I∗| < |∆|, then output null and halt. Otherwise, go to Step 5.
Step 5. Find a partition I1, I2, . . . , Ik of I∗ such that It ∈ I for every t = 1, 2, . . . , k.
Step 6. Partition U \∆ into J1, J2, . . . , Jk in such a way that |It|+ |Jt| ≤ ℓ for every t = 1, 2, . . . , k.
Step 7. Set Ut := It ∪ Jt for each t = 1, 2, . . . , k.
Step 8. Output a family U1, U2, . . . , Uk and halt.
End of Algorithm
It is not difficult to see that the following lemma can be proved in the same way as Lemma 4.
Lemma 6. For every matroid M = (U, I), every function w : U → R, and every positive integers k, ℓ, thedecision version of CSGSS in the minimum base game on the matroid M with the cost function w can besolved in polynomial time by using Algorithm 2.
Lemma 6 implies the following theorem.
Theorem 7. Assume that we are given a matroid M = (U, I), a function w : U → R, and a positive integerℓ. Then, CSGSS in the minimum base game on the matroid M with the cost function w can be solved inpolynomial time.
2.4 Non-empty cores
For each cooperative game Γ = (N, v), we define the core of Γ by
C(Γ) :={x ∈ RN
∣∣∣ ∑i∈N
x(i) = v(N), ∀S ⊆ N :∑i∈X
x(i) ≤ v(S)}.
The concept of a core is regarded as one of natural solution concepts in cooperative games. Thus, thenon-emptiness of a core is a desirable property of a cooperative game. In this subsection, we consider theCOALITION STRUCTURE GENERATION WITH NON-EMPTY CORE problem (CSGNC for short) defined asfollows. In this problem, we are given a cooperative game Γ = (N, v). Then, the goal of this problem is tofind a minimum-size partition N1, N2, . . . , Nk of N such that the core of the cooperative game (Nt, v|Nt)is not empty for any t = 1, 2, . . . , k, and find such a partition if one exists. We prove that CSGNC in theminimum base game on matroids can be solved in polynomial time. It should be noted that Deng andPapadimitriou [13] proved that the special case of CSGNC is NP-complete. The following theorem related tothe non-emptiness of a core of the minimum base game on matroids is known.
6

Theorem 8 (Nagamochi, Zeng, Kabutoya, and Ibaraki [9, Theorem 4.1]). Assume that we are given a ma-troid M = (U, I) and a function w : U → R. Then, the core of the minimum base game on the matroid Mwith the cost function w is not empty if and only if
{u ∈ U | w(u) < 0} ∈ I.
Theorem 8 implies that for every matroid M = (U, I) and every function w : U → R, the core of theminimum base game on the matroid M with the cost function w is not empty if and only if this game issubadditive. Thus, Theorem 5 implies the following theorem.
Theorem 9. Assume that we are given a matroid M = (U, I) and a function w : U → R. Then, CSGNC inthe minimum base game on the matroid M with the cost function w can be solved in polynomial time.
3 Heuristic Algorithms for General Cooperative Games and Application forSharing Taxis
In this section, we propose heuristic algorithms for CSGS in a general cooperative game (Section 3.1), andthen we apply our algorithms to the problem of sharing taxis that is our original motivation (Section 3.2).
3.1 Heuristic algorithms based on a set cover
Our heuristic algorithms are based on the following observation. For every subadditive cooperative gameΓ = (N, v) and every subset X of N , the cooperative game Γ′ = (X, v|X) is subadditive. Thus, for eachcooperative game Γ = (N, v), CSGS in Γ can be formulated as the following integer program IP. We denoteby S(Γ) the family of subsets X of N such that (X, v|X) is subadditive.
Minimize∑
X∈S(Γ)
ξ(X)
subject to∑
X∈S(Γ) : i∈X
ξ(X) ≥ 1 (i ∈ N)
ξ ∈ {0, 1}S(Γ).
Once we can obtain the optimal solution of the problem IP, we can construct an optimal solution for CSGS
by resolving overlap.However, the size of S(Γ) is exponentially large compared to the input size, and enumerating all subsets
of N in S(Γ) is not realistic. Thus, our strategy is to use a subfamily of subsets in S(Γ). For each subfamilyL of S(Γ), we define the integer program IP(L) as follows.
Minimize∑X∈L
ξ(X)
subject to∑
X∈L : i∈Xξ(X) ≥ 1 (i ∈ N)
ξ ∈ {0, 1}L.
7

Furthermore, for each subfamily L of S(Γ), we define the linear programming relaxation LP(L) of IP(L) asfollows.
Minimize∑X∈L
ξ(X)
subject to∑
X∈L : i∈Xξ(X) ≥ 1 (i ∈ N)
ξ ∈ RL+,
where R+ is the set of non-negative real numbers. In addition, the dual problem DP(L) of LP(L) can bedescribed as follows.
Maximize∑i∈N
λ(i)
subject to∑i∈X
λ(i) ≤ 1 (X ∈ L)
λ ∈ RN+ .
Our first heuristic algorithm is described as follows.
Algorithm 3
Step 1. Set L := {{i} | i ∈ N}.
Step 2. Set λ(i) := 1 for every element i in N .
Step 3. While∑
i∈Y λ(i) > 1 for some member Y in S(Γ), do the following steps.
(3-a) Update L := L ∪ {Y }.
(3-b) Find an optimal solution λ of DP(L).
Step 4. Find an optimal solution ξ of IP(L).
Step 5. Output a family {X ∈ L | ξ(X) = 1}, and halt.
End of Algorithm
Notice that Algorithm 3 is a straightforward application of the column generation [14, 15] for the linearprogramming relaxation of the set cover problem [16] (see also [17] for a survey of heuristic algorithmsfor the set cover problem). For the subfamily L that is finally output by the column generation scheme(Step 3), LP(L) yields an exact optimal solution of LP(S(Γ)). Therefore, IP(L) would also yields a goodapproximate solution of IP. Notice that since there may exists a gap between IP(L) and LP(L), Algorithm 3may fail to find an optimal solution. In Step 3 of Algorithm 3, since
∑i∈X λ(i) ≤ 1 for every member X in
L, the size of L is increasing. Thus, since S(Γ) is finite, Algorithm 3 halts. However, since the size of S(Γ)is very large, it is hard to decide whether
∑i∈X λ(i) > 1 for some member X in S(Γ) in Step 3. Thus, in
our second heuristic algorithm, we try to approximately solve this step by using the following Procedure 1.
Procedure 1
Step 1. Sort elements in N as a1, a2, . . . , a|N | in such a way that
λ(a1) ≥ λ(a2) ≥ · · · ≥ λ(a|N |).
8

Step 2. Set X := ∅.
Step 3. For all t = 1, 2, . . . , |N |, do the following steps.
(3-a) Set X ′ := X ∪ {at}.
(3-b) If (X ′, v|X ′) is subadditive (we check this by brute force), then update X := X ′.
Step 4. Output X , and halt.
End of Procedure
Then, our second heuristic algorithm is described as Algorithm 4.
Algorithm 4
Step 1. Set L := {{i} | i ∈ N}.
Step 2. Set λ(i) := 1 for any element i in N .
Step 3. Set Y to be the output of Procedure 1 for λ.
Step 4. While∑
i∈Y λ(i) > 1, do the following steps.
(4-a) Update L := L ∪ {Y }.
(4-b) Find an optimal solution λ of DP(L).
(4-c) Set Y to be the output of Procedure 1 for λ.
Step 5. Find an optimal solution ξ of IP(L).
Step 6. Output a family {X ∈ L | ξ(X) = 1}, and halt.
End of Algorithm
Here we explain how to modify Algorithm 4 in such a way that it can solve CSGSS. For this purpose, itis sufficient to check whether |X ′| does not violate the upper bound in Procedure 1. More precisely, we usethe following Procedure 2 instead of Procedure 1.
Procedure 2
Step 1. Sort elements in N as a1, a2, . . . , a|N | in such a way that
λ(a1) ≥ λ(a2) ≥ · · · ≥ λ(a|N |).
Step 2. Set X := ∅.
Step 3. For all t = 1, 2, . . . , |N |, if |X| < ℓ, then do the following steps.
(3-a) Set X ′ := X ∪ {at}.
(3-b) If (X ′, v|X ′) is subadditive, then update X := X ′.
Step 4. Output X , and halt.
End of Procedure
9

3.2 Application to the problem of sharing taxis
In this section, we apply our heuristic algorithms to CSGS arising from the problem of sharing taxis. Althoughseveral papers studied the problem of sharing vehicles from the theoretical (optimization) viewpoint, almostall papers consider the problem of finding an optimal routing. On the other hand, we focus on the problemof finding routing in which there exist incentive for participants. Furthermore, although several papers (e.g.,[18, 19]) consider routing problems from the viewpoint of the cooperative game theory, their focuses aremainly how to divide the cost of routing plans. To the best of knowledge, no one studied the problem ofsharing vehicles from the viewpoint of grouping.
Our model is defined as follows. We are given a set N of customers. For each customer i in N , we aregiven an origin oi and a destination di. In addition, we are given a special point s, called a depot. For eachsubset X of N , we define
P (X) := {s} ∪ {oi, di | i ∈ X}.
Furthermore, we are given a length function len : P (N)× P (N) → R+.Assume that we are given a subset X of N . A one-to-one mapping π from {1, 2, . . . , 2|X|+1} to P (X)
is called a feasible tour for X , if it satisfies the following conditions (R1) to (R3). For each element p inP (X), let π−1(p) be the integer t in {1, 2, . . . , 2|X|+ 1} such that π(t) = p.
(R1) π(2|X|+ 1) = s.
(R2) For every customer i in X , we have π−1(oi) < π−1(di).
(R3) There exist no integer t in {1, 2, . . . , 2|X| − 1} and no subset Y of X such that
{π(1), π(2), . . . , π(t)} = {oi, di | i ∈ Y }.
The condition (R1) means that the tour ends at s. The condition (R2) means that for every player i in X , thetaxi visits the origin of i before visiting its destination. The condition (R3) means the taxi does not becomeempty in the tour1. For each feasible tour π for X , the length of π is define by
len(s, π(1)) +
2|X|∑t=1
len(π(t), π(t+ 1)).
Here we define the cooperative game related to our motivation. For each subset X of N , we definevrs(X) as the minimum length of a feasible tour for X . In what follows, we consider the cooperative gameΓrs = (N, vrs).
In order to consider tCSGS in Γrs, we first consider the problem of computing vrs(X) for each subset Xof N . Assume that we are given a subset X of N . It is not difficult to see that the problem of computingvrs(X) is NP-complete. We compute vrs(X) by using the integer program RS(X) defined as follows. Fordefining RS(X), we first introduce a directed graph D(X). The vertex set of D(X) is P (X). The arc setA(X) of D(X) is defined by
A(X) := {(p, q) | p, q ∈ P (X) such that p = q},
where (p, q) is an arc from p to q. Notice that for every pair of vertices p, q in P (X), there exist two arcs(p, q) and (q, p) in A(X). For each vertex v in P (X), we denote by δ(v) (resp., ϱ(v)) the set of arcs (p, q)in A(X) such that p = v (resp., q = v). For each arc a = (p, q) in A(X), we define d(a) := len(p, q).
1In Japan, if a taxi becomes empty in a route, it is regarded as two routes and the base fare for each route is billed.
10

We are now ready to give a concrete formulation of RS(X). The variables of RS(X) are x in {0, 1}A(X)
and y, z in RA(X)+ . The variable x represents which arcs the tour uses. That is, if x(a) = 1 for some arc a in
A(X), then the tour uses the arc a. In what follows, for each variable x in {0, 1}A(X), we define
S(x) := {a ∈ A(X) | x(a) = 1}.
Constraints for the variable x are the following.∑a∈δ(v)
x(a) = 1 and∑
a∈ϱ(v)
x(a) = 1 (v ∈ P (X)). (1)
The constraints in (1) ensure that S(x) is the collection of directed cycles in D(X). Thus, we need toensure that S(X) consists of a single directed cycle. For this, we use the variable y. Constraints for y arethe following (these constraints are the same as those used in the so-called “flow based formulation” of thetravelling salesman problem [20]).
y(a) ≤ (|P (X)| − 1) · x(a) (a ∈ A(X))∑a∈δ(s)
y(a) = |P (X)| − 1
∑a∈ϱ(v)
y(a)−∑
a∈δ(v)
y(a) = 1 (v ∈ P (X) \ {s}).
(2)
It is not difficult to see that the constraints in (2) ensure that the number of vertices in the directed cycle inS(x) containing s is |P (X)|, i.e., S(X) consists of a single directed cycle. In addition, we need that thedirected cycle in S(x) satisfies the condition (R2). This can be ensured by the following constraint.∑
a∈δ(oi)
y(a) ≥∑
a∈δ(di)
y(a) (i ∈ X). (3)
Lastly, we consider the condition (R3). For this, we use the variable z. Constraints for z are the following.
z(a) ≤ |X| · x(a) (a ∈ A(X))∑a∈δ(s)
z(a) = 0
∑a∈ϱ(oi)
z(a)−∑
a∈δ(oi)
z(a) = −1 (i ∈ X)
∑a∈ϱ(di)
z(a)−∑
a∈δ(di)
z(a) = 1 (i ∈ X)
∑a∈δ(di)
z(a) ≥ 1− x((di, s)) (i ∈ X).
(4)
It is not difficult to see that if z satisfies the constraints in (4), then the directed cycle in S(x) satisfies thecondition (R3). Furthermore, it is not difficult to see that we can construct variables x in {0, 1}A(X) and y, z
11

in RA(X)+ from a feasible tour for X . Thus, we can formulate RS(X) as follows.
Minimize∑
a∈A(X)
d(a) · x(a)
subject to (1), (2), (3), and (4)
x ∈ {0, 1}A(X)
y, z ∈ RA(X)+ .
In the following experiments, we solve this integer program by using an IP solver.
3.3 Computational experiments
To test our algorithms in a practical setting, we generate virtual taxi demand of customers on a real map.We make an instance of the problem of taxi sharing in the following manner: There are 196 bus stations inItoshima city, Fukuoka prefecture, Japan [21]. The authors depict them in Figure 1. By generating uniformrandom numbers on {1, 2, . . . , 196}, we randomly choose the locations of vertices in P (N) = {s}∪{oi, di |i ∈ N} from the bus stations, where the conditions s = oi, oi = di, and s = di are guaranteed for all i ∈ N .For each a = (p, q) in A(N) such that neither p nor q is not s, we set d(a) to the minimum travel time(min) from p to q along the real road network. The regulations of traffic such as one-way roads and restrictedturns are also taken into consideration. To do this, we solve the shortest path problem, in advance, by usinggeographic information system software ArcGIS for Desktop ver. 10.3 (Esri Inc., USA) and ArcGIS DataCollection Road Network 2015 (Esri Japan Corporation). Moreover, for each a = (p, q) such that either p orq is s, we set d(a) = h/2. Here, the value of h is interpreted as the base fare for a taxi converted in terms oftravel time (min).
(C) Esri Japan
Figure 1: Bus stations in Itoshima city
12

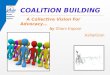
We implemented Algorithms 3 and 4 using Python Language and used Gurobi Optimizer ver. 6.5.1(Gurobi Optimization, Inc.) as the optimization engine to solve the problems DP(·), IP(·), and RS(·). Weexecuted it on a Linux server with Intel R⃝ Xeon R⃝-X5570 processor of 2.93GHz and 12.32GB memoryinstalled. Figure 2 shows our result of measuring the average computational time required to evaluate thecharacteristic function vrs : 2
N → R+. In this experiments, we first generated a virtual instance in the abovemanner, then we evaluated vrs : 2
N → R+ by solving RS(X), the traveling salesman problem (TSP) withtaxi sharing constraints, for all X ⊂ N . We repeated this process 100 times for each |N | = 5, 6, . . . , 10with changing the seed for random numbers. Here, we note again that solving the constrained TSP is alsoNP-hard, and the number of all subsets of N is 2|N |. The result clearly shows that the average computationaltime increases exponentially with the size of N .
Figure 2: Average computational time for evaluating vrs : 2N → R+
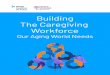
We repeated the process of generating a virtual instance and applying Algorithms 3 and 4 to it. Table1 sums up the average behavior of the experiments. More detailed results measuring the effect of the basefare for a taxi for problems with size form |N | = 13 up to 16 are shown in Table 2. We carried out theexperiments with changing the value of h. Figures 3 and 4 illustrate the outputs of the algorithms for aninstance with |N | = 8. As shown in these figures, each route may pass a road in a neighboring city ofItoshima city.
Estimating the optimization gap is quite hard in our challenging problem. However, since we can exactlysolve the TSP with taxi-sharing constraints, the gap owes the column generation scheme, and it is known tobe one of the most powerful heuristics for the set covering problem. Hence we can say by induction: Ourapproach is not a bad choice.
We note that it is not necessary to evaluate vrs(X) for all X ⊂ N in order to solve the problem ofsharing taxis. In our implementation, RS(X) is solved for the first time when X becomes a candidate whichis added to L and the value of vrs(X) is necessary to decide whether the cooperative game Γ′ = (X, vrs|X)is subadditive or not. A memoization technique is also used. That is, the evaluated value of vrs(X) is storedand reused when it is needed again to check the subadditivity of Γ′′ = (Y, vrs|Y ) for a set Y containing X .
It is found that our heuristic algorithms successfully work in a realistic time for problems with sizeup to |N | = 30. The computational time of our algorithms depends on the maximum cardinality of themembers in L rather than on the size of N . As expected, Table 2 indicates that a raise in the base fare fora taxi gives customers incentive to share taxis, and as a result, the computational time also increases. Inour experiments, the instances were randomly generated and the origin-destination points of customers were
13

Table 1: Average behavior of Algorithms 3 and 4Average
# of Problems Objective value CPU time (sec)|N | (h = 2, 4, 6, 8, 10) Alg. 3 Alg. 4 Alg. 3 Alg. 45 50 (10,10,10,10,10) 2.74 3.08 0.47 0.516 ↓ 2.94 3.36 1.19 1.347 ↓ 3.22 3.64 3.84 3.698 ↓ 3.44 4.48 6.59 7.789 ↓ 3.86 4.82 15.48 10.4710 ↓ 3.70 4.60 44.85 35.6811 ↓ 4.38 5.76 78.15 52.8712 ↓ 4.46 5.74 260.14 221.5513 ↓ 4.76 6.18 417.52 211.0114 ↓ 4.94 6.72 149.18 117.3615 ↓ 4.90 6.60 539.41 205.7316 ↓ 5.26 7.06 822.84 586.2517 ↓ 5.44 7.64 925.38 494.7618 20 (10,10) 7.30 10.20 84.87 66.1519 ↓ 7.10 11.20 72.40 38.4420 ↓ 7.55 11.25 98.90 48.8221 ↓ 7.85 11.50 122.38 88.3022 ↓ 7.85 11.90 422.22 58.1623 ↓ 8.25 14.20 189.83 56.8624 ↓ 8.25 12.05 487.11 247.0925 ↓ 8.75 13.85 617.57 309.7626 ↓ 8.20 13.20 887.69 400.4827 ↓ 8.86 13.38 740.19 302.3228 ↓ 8.86 15.19 920.14 284.1029 ↓ 9.33 14.95 739.99 390.0130 ↓ 9.33 13.81 1346.21 558.00
14

Table 2: Effect of the base fare for a taxi for problems with size |N | = 13, 14, 15, 16Average
# of Objective value CPU time (sec)|N | h Problems Alg. 3 Alg. 4 Alg. 3 Alg. 413 2 10 6.40 9.00 9.04 5.5713 4 10 5.70 6.50 11.86 12.8113 6 10 4.40 5.80 85.19 26.7513 8 10 4.00 5.10 164.61 91.6113 10 10 3.30 4.50 1816.90 918.2913 total 50 4.76 6.18 417.52 211.0114 2 10 7.00 9.00 7.53 5.3414 4 10 5.30 7.90 39.66 18.3614 6 10 4.60 6.20 53.27 48.9314 8 10 4.00 5.70 213.47 197.1014 10 10 3.80 4.80 431.97 317.0614 total 50 4.94 6.72 149.18 117.3615 2 10 6.10 8.80 16.97 14.4715 4 10 6.00 8.30 22.23 15.6415 6 10 4.90 6.10 163.79 173.8715 8 10 3.60 5.20 979.32 473.1915 10 10 3.90 4.60 1514.75 351.4715 total 50 4.90 6.60 539.41 205.7316 2 10 7.60 10.60 17.73 14.2616 4 10 5.30 7.40 57.76 39.4816 6 10 5.20 7.50 739.47 417.0316 8 10 4.40 5.40 780.08 249.8116 10 10 3.80 4.40 2519.18 2210.6816 total 50 5.26 7.06 822.84 586.25
15

(C) Esri Japan, Sumitomo Electric Industries, Ltd.
d1
d8
d4
o4
o1
o8depot
(a) Route 1
(C) Esri Japan, Sumitomo Electric Industries, Ltd.
d7
d2
o7
d3
o2d5
o5
d6
o3
o6
depot
(b) Route 2
Figure 3: Output of Algorithms 3 for an instance with |N | = 8.
16

(C) Esri Japan, Sumitomo Electric Industries, Ltd.
d7
d4d3
o7
o4
d1
o1o3
depot
(a) Route 1
(C) Esri Japan, Sumitomo Electric Industries, Ltd.
d6
d8
o6
d2o2
d5
o5o8
depot
(b) Route 2
Figure 4: Output of Algorithms 4 for the same instance as used in Figure 3.
17

distributed uniformly. Hence, the condition
maxX∈L
|X| ≤ 10
was satisfied for almost of the instances. On the other hand, it is still computationally hard to evaluatevrs : 2
X → R+ when some X such that |X| > 10 becomes a candidate being added to L. However, in a realworld situation, the size of each coalition sharing a taxi is bounded by some upper bound ℓ (ℓ ≤ 10) due tothe capacity of the taxi, customers’ time windows, and so on. Hence, we can use the modified algorithm forCSGSS.
4 Conclusion
In this paper, we introduce the problem of finding a minimum-size partition of the ground set such that asubgame on each coalition is subadditive. Then, we first prove that our problem in the minimum base gameon matroids can be solved in polynomial time. In the second part, we propose heuristic algorithms for ourproblem in a general cooperative game, and apply our algorithms to the problem of partitioning customersfor taxis in such a way that customers in each group have incentive for sharing a taxi.
Acknowledgements
Naoyuki Kamiyama was supported by JST, PRESTO. Akifumi Kira was supported in part by JSPS KAK-ENHI Grant Number 26730010.
References
[1] G. Chalkiadakis, E. Elkind, M. Wooldridge, Computational aspects of cooperative game theory, Syn-thesis Lectures on Artificial Intelligence and Machine Learning 5 (6) (2011) 1–168.
[2] A. Asadpour, A. Saberi, An approximation algorithm for max-min fair allocation of indivisible goods,SIAM Journal on Computing 39 (7) (2010) 2970–2989.
[3] U. Feige, J. Vondrak, The submodular welfare problem with demand queries, Theory of Computing6 (1) (2010) 247–290.
[4] D. Ferraioli, L. Gourves, J. Monnot, On regular and approximately fair allocations of indivisible goods,in: Proceedings of the 13rd International Conference on Autonomous Agents and Multiagent Systems,2014, pp. 997–1004.
[5] B. Lehmann, D. Lehmann, N. Nisan, Combinatorial auctions with decreasing marginal utilities, Gamesand Economic Behavior 55 (2) (2006) 270 – 296.
[6] T. Sandholm, K. Larson, M. Andersson, O. Shehory, F. Tohme, Coalition structure generation withworst case guarantees, Artificial Intelligence 111 (1) (1999) 209–238.
[7] O. Shehory, S. Kraus, Task allocation via coalition formation among autonomous agents, in: Pro-ceedings of the 14th International Joint Conference on Artificial Intelligence - Volume 1, 1995, pp.655–661.
18

[8] G. Greco, E. Malizia, L. Palopoli, F. Scarcello, On the complexity of the core over coalition structures,in: Proceedings of the 22nd International Joint Conference on Artificial Intelligence, 2011, pp. 216–221.
[9] H. Nagamochi, D.-Z. Zeng, N. Kabutoya, T. Ibaraki, Complexity of the minimum base game on ma-troids, Mathematics of Operations Research 22 (1) (1997) 146–164.
[10] J. G. Oxley, Matroid theory, 2nd Edition, Oxford University Press, 2011.
[11] C. Greene, T. L. Magnanti, Some abstract pivot algorithms, SIAM Journal on Applied Mathematics29 (3) (1975) 530–539.
[12] D. E. Knuth, Matroid partitioning, Tech. Rep. STAN-CS-73-342, Computer Science Department, Stan-ford University (1973).
[13] X. Deng, C. H. Papadimitriou, On the complexity of cooperative solution concepts, Mathematics ofOperations Research 19 (2) (1994) 257–266.
[14] L. R. F. Jr, D. R. Fulkerson, A suggested computation for maximal multi-commodity network flows,Management Science 5 (1) (1958) 97–101.
[15] G. B. Dantzig, P. Wolfe, Decomposition principle for linear programs, Operations research 8 (1) (1960)101–111.
[16] R. E. Bixby, J. W. Gregory, I. J. Lustig, R. Marsten, D. Shanno, Very large-scale linear programming: Acase study in combining interior point and simplex methods, Operations Research 40 (1992) 885–897.
[17] S. Umetani, M. Yagiura, Relaxation heuristics for the set covering problem, Journal of the OperationsResearch Society of Japan 50 (2007) 350–375.
[18] M. Gothe-Lundgren, K. Jornsten, P. Varbrand, On the nucleolus of the basic vehicle routing game,Mathematical Programming 72 (1996) 83–100.
[19] A. Tamir, On the core of a traveling salesman cost allocation game, Operations Research Letters 8 (1)(1989) 31 – 34.
[20] B. Gavish, S. Graves, The travelling salesman problem and related problems, Tech. Rep. GR-078-78,Operations Research Center, Massachusetts Institute of Technology (1978).
[21] T. Ministry of Land, Infrastructure, T. (Japan), National land numerical information “bus station data”,http://nlftp.mlit.go.jp/ksj-e/gml/datalist/KsjTmplt-P11.html (2010).
19

List of MI Preprint Series, Kyushu University
The Global COE ProgramMath-for-Industry Education & Research Hub
MI
MI2008-1 Takahiro ITO, Shuichi INOKUCHI & Yoshihiro MIZOGUCHIAbstract collision systems simulated by cellular automata
MI2008-2 Eiji ONODERAThe intial value problem for a third-order dispersive flow into compact almost Her-mitian manifolds
MI2008-3 Hiroaki KIDOOn isosceles sets in the 4-dimensional Euclidean space
MI2008-4 Hirofumi NOTSUNumerical computations of cavity flow problems by a pressure stabilized characteristic-curve finite element scheme
MI2008-5 Yoshiyasu OZEKITorsion points of abelian varieties with values in nfinite extensions over a p-adic field
MI2008-6 Yoshiyuki TOMIYAMALifting Galois representations over arbitrary number fields
MI2008-7 Takehiro HIROTSU & Setsuo TANIGUCHIThe random walk model revisited
MI2008-8 Silvia GANDY, Masaaki KANNO, Hirokazu ANAI & Kazuhiro YOKOYAMAOptimizing a particular real root of a polynomial by a special cylindrical algebraicdecomposition
MI2008-9 Kazufumi KIMOTO, Sho MATSUMOTO & Masato WAKAYAMAAlpha-determinant cyclic modules and Jacobi polynomials
MI2008-10 Sangyeol LEE & Hiroki MASUDAJarque-Bera Normality Test for the Driving Levy Process of a Discretely ObservedUnivariate SDE
MI2008-11 Hiroyuki CHIHARA & Eiji ONODERAA third order dispersive flow for closed curves into almost Hermitian manifolds
MI2008-12 Takehiko KINOSHITA, Kouji HASHIMOTO and Mitsuhiro T. NAKAOOn the L2 a priori error estimates to the finite element solution of elliptic problemswith singular adjoint operator
MI2008-13 Jacques FARAUT and Masato WAKAYAMAHermitian symmetric spaces of tube type and multivariate Meixner-Pollaczek poly-nomials

MI2008-14 Takashi NAKAMURARiemann zeta-values, Euler polynomials and the best constant of Sobolev inequality
MI2008-15 Takashi NAKAMURASome topics related to Hurwitz-Lerch zeta functions
MI2009-1 Yasuhide FUKUMOTOGlobal time evolution of viscous vortex rings
MI2009-2 Hidetoshi MATSUI & Sadanori KONISHIRegularized functional regression modeling for functional response and predictors
MI2009-3 Hidetoshi MATSUI & Sadanori KONISHIVariable selection for functional regression model via the L1 regularization
MI2009-4 Shuichi KAWANO & Sadanori KONISHINonlinear logistic discrimination via regularized Gaussian basis expansions
MI2009-5 Toshiro HIRANOUCHI & Yuichiro TAGUCHIIFlat modules and Groebner bases over truncated discrete valuation rings
MI2009-6 Kenji KAJIWARA & Yasuhiro OHTABilinearization and Casorati determinant solutions to non-autonomous 1+1 dimen-sional discrete soliton equations
MI2009-7 Yoshiyuki KAGEIAsymptotic behavior of solutions of the compressible Navier-Stokes equation aroundthe plane Couette flow
MI2009-8 Shohei TATEISHI, Hidetoshi MATSUI & Sadanori KONISHINonlinear regression modeling via the lasso-type regularization
MI2009-9 Takeshi TAKAISHI & Masato KIMURAPhase field model for mode III crack growth in two dimensional elasticity
MI2009-10 Shingo SAITOGeneralisation of Mack’s formula for claims reserving with arbitrary exponents forthe variance assumption
MI2009-11 Kenji KAJIWARA, Masanobu KANEKO, Atsushi NOBE & Teruhisa TSUDAUltradiscretization of a solvable two-dimensional chaotic map associated with theHesse cubic curve
MI2009-12 Tetsu MASUDAHypergeometric τ-functions of the q-Painleve system of type E
(1)8
MI2009-13 Hidenao IWANE, Hitoshi YANAMI, Hirokazu ANAI & Kazuhiro YOKOYAMAA Practical Implementation of a Symbolic-Numeric Cylindrical Algebraic Decompo-sition for Quantifier Elimination
MI2009-14 Yasunori MAEKAWAOn Gaussian decay estimates of solutions to some linear elliptic equations and itsapplications

MI2009-15 Yuya ISHIHARA & Yoshiyuki KAGEILarge time behavior of the semigroup on Lp spaces associated with the linearizedcompressible Navier-Stokes equation in a cylindrical domain
MI2009-16 Chikashi ARITA, Atsuo KUNIBA, Kazumitsu SAKAI & Tsuyoshi SAWABESpectrum in multi-species asymmetric simple exclusion process on a ring
MI2009-17 Masato WAKAYAMA & Keitaro YAMAMOTONon-linear algebraic differential equations satisfied by certain family of elliptic func-tions
MI2009-18 Me Me NAING & Yasuhide FUKUMOTOLocal Instability of an Elliptical Flow Subjected to a Coriolis Force
MI2009-19 Mitsunori KAYANO & Sadanori KONISHISparse functional principal component analysis via regularized basis expansions andits application
MI2009-20 Shuichi KAWANO & Sadanori KONISHISemi-supervised logistic discrimination via regularized Gaussian basis expansions
MI2009-21 Hiroshi YOSHIDA, Yoshihiro MIWA & Masanobu KANEKOElliptic curves and Fibonacci numbers arising from Lindenmayer system with sym-bolic computations
MI2009-22 Eiji ONODERAA remark on the global existence of a third order dispersive flow into locally Hermi-tian symmetric spaces
MI2009-23 Stjepan LUGOMER & Yasuhide FUKUMOTOGeneration of ribbons, helicoids and complex scherk surface in laser-matter Interac-tions
MI2009-24 Yu KAWAKAMIRecent progress in value distribution of the hyperbolic Gauss map
MI2009-25 Takehiko KINOSHITA & Mitsuhiro T. NAKAOOn very accurate enclosure of the optimal constant in the a priori error estimatesfor H2
0 -projection
MI2009-26 Manabu YOSHIDARamification of local fields and Fontaine’s property (Pm)
MI2009-27 Yu KAWAKAMIValue distribution of the hyperbolic Gauss maps for flat fronts in hyperbolic three-space
MI2009-28 Masahisa TABATANumerical simulation of fluid movement in an hourglass by an energy-stable finiteelement scheme
MI2009-29 Yoshiyuki KAGEI & Yasunori MAEKAWAAsymptotic behaviors of solutions to evolution equations in the presence of transla-tion and scaling invariance

MI2009-30 Yoshiyuki KAGEI & Yasunori MAEKAWAOn asymptotic behaviors of solutions to parabolic systems modelling chemotaxis
MI2009-31 Masato WAKAYAMA & Yoshinori YAMASAKIHecke’s zeros and higher depth determinants
MI2009-32 Olivier PIRONNEAU & Masahisa TABATAStability and convergence of a Galerkin-characteristics finite element scheme oflumped mass type
MI2009-33 Chikashi ARITAQueueing process with excluded-volume effect
MI2009-34 Kenji KAJIWARA, Nobutaka NAKAZONO & Teruhisa TSUDAProjective reduction of the discrete Painleve system of type(A2 +A1)
(1)
MI2009-35 Yosuke MIZUYAMA, Takamasa SHINDE, Masahisa TABATA & Daisuke TAGAMIFinite element computation for scattering problems of micro-hologram using DtNmap
MI2009-36 Reiichiro KAWAI & Hiroki MASUDAExact simulation of finite variation tempered stable Ornstein-Uhlenbeck processes
MI2009-37 Hiroki MASUDAOn statistical aspects in calibrating a geometric skewed stable asset price model
MI2010-1 Hiroki MASUDAApproximate self-weighted LAD estimation of discretely observed ergodic Ornstein-Uhlenbeck processes
MI2010-2 Reiichiro KAWAI & Hiroki MASUDAInfinite variation tempered stable Ornstein-Uhlenbeck processes with discrete obser-vations
MI2010-3 Kei HIROSE, Shuichi KAWANO, Daisuke MIIKE & Sadanori KONISHIHyper-parameter selection in Bayesian structural equation models
MI2010-4 Nobuyuki IKEDA & Setsuo TANIGUCHIThe Ito-Nisio theorem, quadratic Wiener functionals, and 1-solitons
MI2010-5 Shohei TATEISHI & Sadanori KONISHINonlinear regression modeling and detecting change point via the relevance vectormachine
MI2010-6 Shuichi KAWANO, Toshihiro MISUMI & Sadanori KONISHISemi-supervised logistic discrimination via graph-based regularization
MI2010-7 Teruhisa TSUDAUC hierarchy and monodromy preserving deformation
MI2010-8 Takahiro ITOAbstract collision systems on groups

MI2010-9 Hiroshi YOSHIDA, Kinji KIMURA, Naoki YOSHIDA, Junko TANAKA & YoshihiroMIWAAn algebraic approach to underdetermined experiments
MI2010-10 Kei HIROSE & Sadanori KONISHIVariable selection via the grouped weighted lasso for factor analysis models
MI2010-11 Katsusuke NABESHIMA & Hiroshi YOSHIDADerivation of specific conditions with Comprehensive Groebner Systems
MI2010-12 Yoshiyuki KAGEI, Yu NAGAFUCHI & Takeshi SUDOUDecay estimates on solutions of the linearized compressible Navier-Stokes equationaround a Poiseuille type flow
MI2010-13 Reiichiro KAWAI & Hiroki MASUDAOn simulation of tempered stable random variates
MI2010-14 Yoshiyasu OZEKINon-existence of certain Galois representations with a uniform tame inertia weight
MI2010-15 Me Me NAING & Yasuhide FUKUMOTOLocal Instability of a Rotating Flow Driven by Precession of Arbitrary Frequency
MI2010-16 Yu KAWAKAMI & Daisuke NAKAJOThe value distribution of the Gauss map of improper affine spheres
MI2010-17 Kazunori YASUTAKEOn the classification of rank 2 almost Fano bundles on projective space
MI2010-18 Toshimitsu TAKAESUScaling limits for the system of semi-relativistic particles coupled to a scalar bosefield
MI2010-19 Reiichiro KAWAI & Hiroki MASUDALocal asymptotic normality for normal inverse Gaussian Levy processes with high-frequency sampling
MI2010-20 Yasuhide FUKUMOTO, Makoto HIROTA & Youichi MIELagrangian approach to weakly nonlinear stability of an elliptical flow
MI2010-21 Hiroki MASUDAApproximate quadratic estimating function for discretely observed Levy driven SDEswith application to a noise normality test
MI2010-22 Toshimitsu TAKAESUA Generalized Scaling Limit and its Application to the Semi-Relativistic ParticlesSystem Coupled to a Bose Field with Removing Ultraviolet Cutoffs
MI2010-23 Takahiro ITO, Mitsuhiko FUJIO, Shuichi INOKUCHI & Yoshihiro MIZOGUCHIComposition, union and division of cellular automata on groups
MI2010-24 Toshimitsu TAKAESUA Hardy’s Uncertainty Principle Lemma inWeak Commutation Relations of Heisenberg-Lie Algebra

MI2010-25 Toshimitsu TAKAESUOn the Essential Self-Adjointness of Anti-Commutative Operators
MI2010-26 Reiichiro KAWAI & Hiroki MASUDAOn the local asymptotic behavior of the likelihood function for Meixner Levy pro-cesses under high-frequency sampling
MI2010-27 Chikashi ARITA & Daichi YANAGISAWAExclusive Queueing Process with Discrete Time
MI2010-28 Jun-ichi INOGUCHI, Kenji KAJIWARA, Nozomu MATSUURA & Yasuhiro OHTAMotion and Backlund transformations of discrete plane curves
MI2010-29 Takanori YASUDA, Masaya YASUDA, Takeshi SHIMOYAMA & Jun KOGUREOn the Number of the Pairing-friendly Curves
MI2010-30 Chikashi ARITA & Kohei MOTEGISpin-spin correlation functions of the q-VBS state of an integer spin model
MI2010-31 Shohei TATEISHI & Sadanori KONISHINonlinear regression modeling and spike detection via Gaussian basis expansions
MI2010-32 Nobutaka NAKAZONOHypergeometric τ functions of the q-Painleve systems of type (A2 +A1)
(1)
MI2010-33 Yoshiyuki KAGEIGlobal existence of solutions to the compressible Navier-Stokes equation aroundparallel flows
MI2010-34 Nobushige KUROKAWA, Masato WAKAYAMA & Yoshinori YAMASAKIMilnor-Selberg zeta functions and zeta regularizations
MI2010-35 Kissani PERERA & Yoshihiro MIZOGUCHILaplacian energy of directed graphs and minimizing maximum outdegree algorithms
MI2010-36 Takanori YASUDACAP representations of inner forms of Sp(4) with respect to Klingen parabolic sub-group
MI2010-37 Chikashi ARITA & Andreas SCHADSCHNEIDERDynamical analysis of the exclusive queueing process
MI2011-1 Yasuhide FUKUMOTO& Alexander B. SAMOKHINSingular electromagnetic modes in an anisotropic medium
MI2011-2 Hiroki KONDO, Shingo SAITO & Setsuo TANIGUCHIAsymptotic tail dependence of the normal copula
MI2011-3 Takehiro HIROTSU, Hiroki KONDO, Shingo SAITO, Takuya SATO, Tatsushi TANAKA& Setsuo TANIGUCHIAnderson-Darling test and the Malliavin calculus
MI2011-4 Hiroshi INOUE, Shohei TATEISHI & Sadanori KONISHINonlinear regression modeling via Compressed Sensing

MI2011-5 Hiroshi INOUEImplications in Compressed Sensing and the Restricted Isometry Property
MI2011-6 Daeju KIM & Sadanori KONISHIPredictive information criterion for nonlinear regression model based on basis ex-pansion methods
MI2011-7 Shohei TATEISHI, Chiaki KINJYO & Sadanori KONISHIGroup variable selection via relevance vector machine
MI2011-8 Jan BREZINA & Yoshiyuki KAGEIDecay properties of solutions to the linearized compressible Navier-Stokes equationaround time-periodic parallel flowGroup variable selection via relevance vector machine
MI2011-9 Chikashi ARITA, Arvind AYYER, Kirone MALLICK & Sylvain PROLHACRecursive structures in the multispecies TASEP
MI2011-10 Kazunori YASUTAKEOn projective space bundle with nef normalized tautological line bundle
MI2011-11 Hisashi ANDO, Mike HAY, Kenji KAJIWARA & Tetsu MASUDAAn explicit formula for the discrete power function associated with circle patternsof Schramm type
MI2011-12 Yoshiyuki KAGEIAsymptotic behavior of solutions to the compressible Navier-Stokes equation arounda parallel flow
MI2011-13 Vladimır CHALUPECKY & Adrian MUNTEANSemi-discrete finite difference multiscale scheme for a concrete corrosion model: ap-proximation estimates and convergence
MI2011-14 Jun-ichi INOGUCHI, Kenji KAJIWARA, Nozomu MATSUURA & Yasuhiro OHTAExplicit solutions to the semi-discrete modified KdV equation and motion of discreteplane curves
MI2011-15 Hiroshi INOUEA generalization of restricted isometry property and applications to compressed sens-ing
MI2011-16 Yu KAWAKAMIA ramification theorem for the ratio of canonical forms of flat surfaces in hyperbolicthree-space
MI2011-17 Naoyuki KAMIYAMAMatroid intersection with priority constraints
MI2012-1 Kazufumi KIMOTO & Masato WAKAYAMASpectrum of non-commutative harmonic oscillators and residual modular forms
MI2012-2 Hiroki MASUDAMighty convergence of the Gaussian quasi-likelihood random fields for ergodic Levydriven SDE observed at high frequency

MI2012-3 Hiroshi INOUEA Weak RIP of theory of compressed sensing and LASSO
MI2012-4 Yasuhide FUKUMOTO & Youich MIEHamiltonian bifurcation theory for a rotating flow subject to elliptic straining field
MI2012-5 Yu KAWAKAMIOn the maximal number of exceptional values of Gauss maps for various classes ofsurfaces
MI2012-6 Marcio GAMEIRO, Yasuaki HIRAOKA, Shunsuke IZUMI, Miroslav KRAMAR,Konstantin MISCHAIKOW & Vidit NANDATopological Measurement of Protein Compressibility via Persistence Diagrams
MI2012-7 Nobutaka NAKAZONO & Seiji NISHIOKA
Solutions to a q-analog of Painleve III equation of type D(1)7
MI2012-8 Naoyuki KAMIYAMAA new approach to the Pareto stable matching problem
MI2012-9 Jan BREZINA & Yoshiyuki KAGEISpectral properties of the linearized compressible Navier-Stokes equation aroundtime-periodic parallel flow
MI2012-10 Jan BREZINAAsymptotic behavior of solutions to the compressible Navier-Stokes equation arounda time-periodic parallel flow
MI2012-11 Daeju KIM, Shuichi KAWANO & Yoshiyuki NINOMIYAAdaptive basis expansion via the extended fused lasso
MI2012-12 Masato WAKAYAMAOn simplicity of the lowest eigenvalue of non-commutative harmonic oscillators
MI2012-13 Masatoshi OKITAOn the convergence rates for the compressibleNavier- Stokes equations with potential force
MI2013-1 Abuduwaili PAERHATI & Yasuhide FUKUMOTOA Counter-example to Thomson-Tait-Chetayev’s Theorem
MI2013-2 Yasuhide FUKUMOTO & Hirofumi SAKUMAA unified view of topological invariants of barotropic and baroclinic fluids and theirapplication to formal stability analysis of three-dimensional ideal gas flows
MI2013-3 Hiroki MASUDAAsymptotics for functionals of self-normalized residuals of discretely observed stochas-tic processes
MI2013-4 Naoyuki KAMIYAMAOn Counting Output Patterns of Logic Circuits
MI2013-5 Hiroshi INOUERIPless Theory for Compressed Sensing

MI2013-6 Hiroshi INOUEImproved bounds on Restricted isometry for compressed sensing
MI2013-7 Hidetoshi MATSUIVariable and boundary selection for functional data via multiclass logistic regressionmodeling
MI2013-8 Hidetoshi MATSUIVariable selection for varying coefficient models with the sparse regularization
MI2013-9 Naoyuki KAMIYAMAPacking Arborescences in Acyclic Temporal Networks
MI2013-10 Masato WAKAYAMAEquivalence between the eigenvalue problem of non-commutative harmonic oscilla-tors and existence of holomorphic solutions of Heun’s differential equations, eigen-states degeneration, and Rabi’s model
MI2013-11 Masatoshi OKITAOptimal decay rate for strong solutions in critical spaces to the compressible Navier-Stokes equations
MI2013-12 Shuichi KAWANO, Ibuki HOSHINA, Kazuki MATSUDA & Sadanori KONISHIPredictive model selection criteria for Bayesian lasso
MI2013-13 Hayato CHIBAThe First Painleve Equation on the Weighted Projective Space
MI2013-14 Hidetoshi MATSUIVariable selection for functional linear models with functional predictors and a func-tional response
MI2013-15 Naoyuki KAMIYAMAThe Fault-Tolerant Facility Location Problem with Submodular Penalties
MI2013-16 Hidetoshi MATSUISelection of classification boundaries using the logistic regression
MI2014-1 Naoyuki KAMIYAMAPopular Matchings under Matroid Constraints
MI2014-2 Yasuhide FUKUMOTO & Youichi MIELagrangian approach to weakly nonlinear interaction of Kelvin waves and a symmetry-breaking bifurcation of a rotating flow
MI2014-3 Reika AOYAMADecay estimates on solutions of the linearized compressible Navier-Stokes equationaround a Parallel flow in a cylindrical domain
MI2014-4 Naoyuki KAMIYAMAThe Popular Condensation Problem under Matroid Constraints

MI2014-5 Yoshiyuki KAGEI & Kazuyuki TSUDAExistence and stability of time periodic solution to the compressible Navier-Stokesequation for time periodic external force with symmetry
MI2014-6 This paper was withdrawn by the authors.
MI2014-7 Masatoshi OKITAOn decay estimate of strong solutions in critical spaces for the compressible Navier-Stokes equations
MI2014-8 Rong ZOU & Yasuhide FUKUMOTOLocal stability analysis of azimuthal magnetorotational instability of ideal MHDflows
MI2014-9 Yoshiyuki KAGEI & Naoki MAKIOSpectral properties of the linearized semigroup of the compressible Navier-Stokesequation on a periodic layer
MI2014-10 Kazuyuki TSUDAOn the existence and stability of time periodic solution to the compressible Navier-Stokes equation on the whole space
MI2014-11 Yoshiyuki KAGEI & Takaaki NISHIDAInstability of plane Poiseuille flow in viscous compressible gas
MI2014-12 Chien-Chung HUANG, Naonori KAKIMURA & Naoyuki KAMIYAMAExact and approximation algorithms for weighted matroid intersection
MI2014-13 Yusuke SHIMIZUMoment convergence of regularized least-squares estimator for linear regression model
MI2015-1 Hidetoshi MATSUI & Yuta UMEZUSparse regularization for multivariate linear models for functional data
MI2015-2 Reika AOYAMA & Yoshiyuki KAGEISpectral properties of the semigroup for the linearized compressible Navier-Stokesequation around a parallel flow in a cylindrical domain
MI2015-3 Naoyuki KAMIYAMAStable Matchings with Ties, Master Preference Lists, and Matroid Constraints
MI2015-4 Reika AOYAMA & Yoshiyuki KAGEILarge time behavior of solutions to the compressible Navier-Stokes equations arounda parallel flow in a cylindrical domain
MI2015-5 Kazuyuki TSUDAExistence and stability of time periodic solution to the compressible Navier-Stokes-Korteweg system on R3
MI2015-6 Naoyuki KAMIYAMAPopular Matchings with Ties and Matroid Constraints

MI2015-7 Shoichi EGUCHI & Hiroki MASUDAQuasi-Bayesian model comparison for LAQ models
MI2015-8 Yoshiyuki KAGEI & Ryouta OOMACHIStability of time periodic solution of the Navier-Stokes equation on the half-spaceunder oscillatory moving boundary condition
MI2016-1 Momonari KUDOAnalysis of an algorithm to compute the cohomology groups of coherent sheaves andits applications
MI2016-2 Yoshiyuki KAGEI & Masatoshi OKITAAsymptotic profiles for the compressible Navier-Stokes equations on the whole space
MI2016-3 Shota ENOMOTO & Yoshiyuki KAGEIAsymptotic behavior of the linearized semigroup at space-periodic stationary solu-tion of the compressible Navier-Stokes equation
MI2016-4 Hiroki MASUDANon-Gaussian quasi-likelihood estimation of locally stable SDE
MI2016-5 Yoshiyuki KAGEI & Takaaki NISHIDAOn Chorin’s method for stationary solutions of the Oberbeck-Boussinesq equation
MI2016-6 Hayato WAKI & Florin NAEBoundary modeling in model-based calibration for automotive engines via the vertexrepresentation of the convex hulls
MI2016-7 Kazuyuki TSUDATime periodic problem for the compressible Navier-Stokes equation on R2 with an-tisymmetry
MI2016-8 Abulizi AIHAITI, Shota ENOMOTO & Yoshiyuki KAGEILarge time behavior of solutions to the compressible Navier-Stokes equations in aninfinite layer under slip boundary condition
MI2016-9 Fermın Franco MEDRANO, Yasuhide FUKUMOTO, Clara M. VELTE & AzurHODZICGas entrainment rate coefficient of an ideal momentum atomizing liquid jet
MI2016-10 Naoyuki KAMIYAMA, Akifumi KIRA, Hirokazu ANAI, Hidenao IWANE & KotaroOHORICoalition Structure Generation with Subadditivity Constraints