Embed Size (px)
Citation preview

276 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
Coalition Formation Games for CollaborativeSpectrum Sensing
Walid Saad, Member, IEEE, Zhu Han, Senior Member, IEEE, Tamer Basar, Fellow, IEEE,Mérouane Debbah, Senior Member, IEEE, and Are Hjørungnes, Senior Member, IEEE
Abstract—Collaborative spectrum sensing (CSS) between sec-ondary users (SUs) in cognitive networks exhibits an inherenttradeoff between minimizing the probability of missing the de-tection of the primary user (PU) and maintaining a reasonablefalse alarm probability (e.g., for maintaining good spectrum uti-lization). In this paper, we study the impact of this tradeoff onthe network structure and the cooperative incentives of the SUsthat seek to cooperate to improve their detection performance. Wemodel the CSS problem as a nontransferable coalitional game,and we propose distributed algorithms for coalition formation(CF). First, we construct a distributed CF algorithm that allowsthe SUs to self-organize into disjoint coalitions while accountingfor the CSS tradeoff. Then, the CF algorithm is complementedwith a coalitional voting game to enable distributed CF withdetection probability (CF-PD) guarantees when required by thePU. The CF-PD algorithm allows the SUs to form minimal winningcoalitions (MWCs), i.e., coalitions that achieve the target detectionprobability with minimal costs. For both algorithms, we studyand prove various properties pertaining to network structure,adaptation to mobility, and stability. Simulation results show thatCF reduces the average probability of miss per SU up to 88.45%,relative to the noncooperative case, while maintaining a desiredfalse alarm. For CF-PD, the results show that up to 87.25% of theSUs achieve the required detection probability through MWCs.
Index Terms—Coalitional game, cognitive radio, collaborativesensing, game theory, spectrum sensing.
I. INTRODUCTION
R ECENTLY, there has been a surge in wireless services,yielding a huge demand on the radio spectrum. However,
Manuscript received April 10, 2010; revised August 18, 2010; acceptedOctober 5, 2010. Date of publication October 21, 2010; date of currentversion January 20, 2011. This work was supported in part by the ResearchCouncil of Norway under Project 183311/S10, Project 176773/S10, and Project18778/V11, and in part through a Multidisciplinary University Research Initia-tive Grant at the University of Illinois at Urbana Champaign. This paper waspresented in part at the IEEE Conference on Computer Communications, Riode Janeiro, Brazil, April 2009. The review of this paper was coordinated byProf. R. Schober.
W. Saad is with the UNIK Graduate University Center, University of Oslo,0316 Oslo, Norway, and also with the Electrical and Computer Engineer-ing Department, Princeton University, Princeton, NJ 08544 USA (e-mail:[email protected]).
Z. Han is with the Electrical and Computer Engineering Department, Univer-sity of Houston, Houston, TX 77204-4005 USA (e-mail: [email protected]).
T. Basar is with the Coordinated Science Laboratory, University ofIllinois at Urbana Champaign, Urbana, IL 61801-2307 USA (e-mail:[email protected]).
M. Debbah is with Alcatel-Lucent, École Supérieure d’Électricité, 91192 Gifsur Yvette, France (e-mail: [email protected]).
A. Hjørungnes is with the UNIK Graduate University Center, University ofOslo, 0316 Oslo, Norway (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TVT.2010.2089477
spectrum resources are scarce, and most of them have alreadybeen licensed to existing operators. Various studies have shownthat the actual licensed spectrum remains unoccupied for largeperiods [1]. For efficiently exploiting these spectrum holes, cog-nitive radio has been proposed [2]. By monitoring and adaptingto the environment, cognitive radios [secondary users (SUs)]can share the spectrum with the licensed user [primary user(PU)], operating whenever the PU is not using the spectrum.However, deploying such flexible SUs faces several challenges[3] at different levels, such as spectrum access [3]–[5] andspectrum sensing [6]–[15]. Spectrum sensing mainly deals withthe stage during which the cognitive users attempt to learntheir environment prior to accessing and sharing the spectrum.For instance, the SUs must constantly sense the spectrum todetect the presence of the PU and use the spectrum holeswithout causing harmful interference to the PU. Hence, efficientand distributed spectrum sensing is of utter importance andconstitutes a major challenge in cognitive radio networks.
For sensing the PU presence, the SUs must be able to detectits signal using various kinds of detectors, such as energydetectors or others [6]. However, the performance of spectrumsensing is significantly affected by the degradation of the PUsignal due to path loss or shadowing (hidden terminal). It hasbeen shown that, through collaborative spectrum sensing (CSS)among SUs, the effects of this hidden terminal problem canbe reduced, and the probability of detecting the PU can beimproved [7]–[10], [12]–[15]. In [7], the SUs collaborate bysharing their sensing decisions through a centralized fusioncenter that combines the SUs’ sensing bits using the OR-rule for data fusion. A similar approach is used in [9] usingdifferent decision-combining methods. In [10], it is shownthat, in CSS, soft decisions can have an almost comparableperformance with hard decisions while reducing complexity.The authors in [12] propose an evolutionary game model forCSS to inspect the strategies of the SUs and their contribution tothe sensing process. The effect of the sensing time on the accessperformance of the SUs in a cognitive network is analyzedin [11]. To improve the performance of CSS, spatial diversitytechniques are presented in [13] as a means of combatingthe error probability due to fading on the reporting channelbetween the SUs and the central fusion center. Other interestingperformance aspects of spectrum sensing and CSS are studiedin [8] and [14]–[18]. Existing literature mainly focused on theperformance assessment of CSS in the presence of a centralizedfusion center that combines all the SU bits. In practice, theSUs can be at different locations in the network and thusprefer to form nearby groups for CSS without relying on a
0018-9545/$26.00 © 2010 IEEE
SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 277
centralized entity. Moreover, the SUs can belong to differentservice providers and need to interact with each other for CSSinstead of relaying their bits to a centralized fusion center thatmay not even exist in an ad hoc network of SUs. In addition,a centralized approach requires the deployment and/or reuse ofan infrastructure for the purpose of spectrum sensing, which isquite impractical as many secondary networks are inherently adhoc. Further, the use of a centralized spectrum sensing approachcan yield a significant overhead and complexity, notably innetworks with a large number of SUs having varying locations.
The main contribution of this paper is to devise distributedstrategies for CSS between the SUs in a cognitive network,which capture the spectrum sensing objectives of these SUs. Afurther contribution of this paper is to inspect how the networkstructure can evolve and change as a result of the cooperativeincentives of the SUs seeking to improve their spectrum sensingperformance, given the inherent tradeoff that exists betweenthe CSS gains in terms of reducing the probability of missingthe detection of the PU and the cooperation costs in termsof maintaining a reasonable false alarm probability (e.g., tomaintain an efficient spectrum utilization). We model the CSSproblem as a nontransferable coalitional game, and we proposea distributed coalition formation (CF) algorithm. Using CF,each SU autonomously decides to form or leave a coalitionwhile maximizing its utility in terms of detection probabilityand accounting for the false alarm cost. We show that, due to thecost for cooperation, independent disjoint coalitions will formin the network, and a maximum coalition size exists for theproposed utility model. For cognitive networks where the PUimposes a detection probability level on the SUs, we proposea distributed CF algorithm with detection probability (CF-PD)guarantees that is built by overlaying a coalitional voting gameon the CF algorithm. The CF-PD algorithm enables the SUsto autonomously take the decision to form minimal winningcoalitions (MWCs), i.e., coalitions that achieve the target de-tection probability with minimal cost. Through simulations,we assess the performance of both algorithms relative to thenoncooperative case, compare the results with a centralizedsolution, and show how the SUs can self-organize and adapt thenetwork structure to environmental changes, such as mobility.
Note that, although some existing literature such as [19] and[20] have dealt with the idea of forming clusters for CSS, theobjectives of [19] and [20] are different from the contributionsof this paper. For instance, [19] studies, in the context of thecentralized fusion-center-based CSS, the possibility of usingclusters for combating the errors on the reporting channel.However, the authors do not deal with the idea of distributedCSS, and as clearly stated in [19, Sec. III], the paper doesnot propose any algorithm for forming the clusters; instead, itassumes that the clusters are already formed. Moreover, [19]does not account for the tradeoff between the probabilities ofmiss and false alarm, which impacts the size and identities ofthe SUs that will form coalitions or clusters. In this context, thispaper complements [19] by having a number of different andnovel contributions, as discussed in the previous paragraph.
Further, in [20], the authors focus on studying the perfor-mance of CSS in a geographical area using different detectiontechniques, such as energy detection or feature detection. The
idea of clustering in [20] is restricted to dividing, based on thereceived signal strength of the PU, a large geographical areainto a number of defined clusters, which are geographical areaswith a large radius, i.e., analogous to the cells of a wirelesscellular system. Within every cluster or cell, the work in [20]considers that a large number of SUs exist, and these SUs utilizethe traditional network-wide fusion center solution at cell level.Moreover, in [20], no target probability of miss or false alarmconstraint is taken into account. In short, [20] does not look atdistributed strategies enabling the SUs to autonomously formcoalitions while optimizing their probability of miss given afalse alarm constraint. In essence, our approach complementsthe work done in [20]. For instance, given a cognitive networkdeployed in a large geographical area, one can first geographi-cally cluster it into cells using the approach [20], and then, ourproposed CF approach can be applied by the SUs inside eachcluster or cell.
The rest of this paper is organized as follows: Section IIpresents the system model. In Section III, we present the pro-posed coalitional game and prove different properties, whereasin Section IV, we devise a distributed algorithm for autonomousCF. Section V extends the CF algorithm to accommodate theprobability of detection guarantees. In Section VI, we discussthe implementation aspects in practical cognitive networks.Simulation results are presented and analyzed in Section VII.Finally, conclusions are drawn in Section VIII.
II. SYSTEM MODEL
Consider a network consisting of N transmit–receive pairs ofSUs and a single PU with N = {1, . . . , N} denoting the set ofall SUs. The SUs and the PU can be either stationary or mobile.Throughout this paper, we assume that all SUs are honest nodeswith no malicious or cheating behavior. Since the focus is onspectrum sensing, we are only interested in the transmitter partof each of the N SUs. In a noncooperative approach, each of theN SUs continuously senses the spectrum to detect the presenceof the PU. We consider that the SUs will adopt energy detectorswhich are one of the main practical signal detectors in cognitiveradio networks [7], [9], [13]. In such a noncooperative settingwith Rayleigh fading, the probabilities of miss (i.e., probabilityof missing the detection of the PU) and false alarm for an SU iare, respectively, given by Pm,i and Pf,i [7, eqs. (2) and (4)] asfollows:
Pm,i = 1−e−λ2
m−2∑n=0
1n!
(λ
2
)n
+(
1+γi,PU
γi,PU
)m−1
×[e− λ
2(1+γi,P U) −e−λ2
m−2∑n=0
1n!
(λγi,PU
2(1+γi,PU )
)n]
(1)
Pf,i = Pf =Γ(m, λ
2 )Γ(m)
(2)
where m is the time–bandwidth product, λ is the energy detec-tion threshold assumed to be the same for all SUs without lossof generality (as in [7], [9], and [13]), Γ(·, ·) is the incompletegamma function, and Γ(·) is the gamma function. Moreover,

278 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
γi represents the average SNR of the received signal from PUto SU given by γi,PU = (PPUhPU,i/σ2), where PPU is thetransmit power of the PU, σ2 is the Gaussian noise variance,hPU,i = κ/dμ
PU,i is the path loss between PU and SU i, κ is thepath loss constant, μ is the path loss exponent, and dPU,i is thedistance between PU and SU i.
The expression in (1) averages out the effect of small-scalefading, and thus, in the remainder of this paper, we only dealwith large-scale fading effects, e.g., due to path loss. Further,it is also important to note that the noncooperative false alarmprobability expression depends solely on the detection thresh-old λ and does not depend on the SU’s location; hence, wedropped the subscript i in (2). Note that we do not accountfor the shadowing effect; however, in future work, (1) canbe modified to take into account this effect, as shown in [3],[7], and [9]. Moreover, an important metric is the probabilityof detection of the PU by SU i, which is simply defined asPd,i = 1 − Pm,i.
To minimize the interference on the PU and reduce the prob-ability of miss, the SUs can cooperate by forming coalitions.Within each coalition S ⊆ N , an SU designated as coalitionhead collects the sensing bits from the coalition’s SUs and actsas a fusion center to make a coalition-based decision on thepresence or absence of the PU. This can be seen as havingthe centralized CSS of [7] and [13] applied at the level ofeach coalition with the coalition head being the fusion centerto which all the coalition members report. For combiningthe sensing bits and making the final detection decision, thecoalition head uses the decision fusion OR-rule, such as in [7]and [13]. For a coalition S having coalition head k ∈ S, usingCSS, the miss and false alarm probabilities are, respectively,given by [13]
Qm,S =∏i∈S
[Pm,i(1 − Pe,i,k) + (1 − Pm,i)Pe,i,k] (3)
Qf,S = 1 −∏i∈S
[(1 − Pf )(1 − Pe,i,k) + PfPe,i,k] (4)
where Pm,i and Pf are given by (1) and (2), and Pe,i,k isthe probability of error due to fading on the reporting channelbetween the SU i of coalition S and the coalition head k. Theerror over the reporting channel is an important metric thataffects the performance of CSS in terms of probability of missas well as false alarm, as demonstrated in [13]. The main ideais that, whenever an SU needs to report its sensing bit to thecoalition head, the coalition head might receive this bit in errordue to the fading over the wireless channel between the SU andthe coalition head. This reporting error Pe,i,k between an SU iand the coalition head k increases the probability of miss andincreases the false alarm, as shown in (3) and (4). Inside anycoalition S, assuming binary phase-shift-keying modulationin Rayleigh fading environments, the average probability ofreporting error between SU i ∈ S and the coalition head k ∈ Sis given by [21]
Pe,i,k =12
(1 −
√γi,k
1 + γi,k
)(5)
Fig. 1. Illustrative example of CF for CSS among SUs.
where γi,k = (Pihi,k/σ2) is the average SNR for bit reportingbetween SU i and the coalition head k inside S with Pi as thetransmit power of SU i used for reporting the sensing bit to kand hi,k = (κ/dμ
i,k) as the path loss between SU i and coalitionhead k. Any SU can be chosen as a coalition head within acoalition. However, for the remainder of this paper, we adoptthe following convention without loss of generality.
Convention 1: Within a coalition S, the SU k ∈ S having thelowest noncooperative probability of miss Pm,k is chosen as thecoalition head. Hence, the coalition head k of a coalition S isgiven by k ∈ arg mini∈S Pm,i, with Pm,i given by (1).1
The motivation behind Convention 1 is that, due to the erroron the reporting channel, whenever an SU needs to report itssensing bit to a coalition head, there is a potential “risk” thatthe bit is received in error, as per (3)–(5). This risk motivatesthe adoption of Convention 1, whereby the SU with minimumnoncooperative miss probability, i.e., the SU with the bestchannel toward the PU, is used as a coalition head and thusdoes not need to send its bit (which is the most reliable in thecoalition) to other SUs in the coalition and risk the reception ofthis bit in error, subsequently affecting the performance in termsof probability of miss and false alarm. It must be noted that theanalysis and algorithm discussed in the remainder of this papercan accommodate other coalition head selection approaches(e.g., select the SU closest to the center of a coalition).
It should be clear from (3) and (4) that, as the number of SUsper coalition increases, the probability of miss will decreasewhile the probability of false alarm will increase. This is acrucial tradeoff in CSS that can have a major impact on thecollaboration strategies of each SU. Thus, our objective is tocharacterize the network structure that will form when the SUscollaborate while accounting for this tradeoff. An example ofthe sought network structure is shown in Fig. 1. Finding the
1Note that, if more than one SU in a coalition achieves the minimumprobability of miss, then the coalition head is picked at random among the setof SUs with minimum probability of miss.

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 279
optimal coalition structure, such as in Fig. 1, using a centralizedapproach requires finding the partition of the set that minimizesthe average probability of miss per SU while maintaining afalse alarm constraint per SU. For instance, in the centralizedapproach, the optimization problem aims at minimizing theoverall system’s average probability of miss per SU given aconstraint on the average false alarm probability per SU. Inother words, denoting B as the set of all partitions of N , thecentralized approach seeks to solve the following optimizationproblem:
minT ∈B
∑S∈T |S| · Qm,S
N, s.t. Qf,S ≤ α ∀ S ∈ T
where | · | represents the cardinality of a set operator, and Sis a coalition belonging to the partition T . Note that, in thiscentralized optimization problem, it is considered that the falsealarm probability constraint per SU directly maps to a falsealarm probability constraint per coalition, which will be moreformally demonstrated in the next section through Property 1.
However, it is shown in [22] that finding the optimal coalitionstructure in a centralized manner leads to an optimizationproblem that is NP-complete. This is mainly due to the fact thatthe number of possible coalition structures (partitions) is givenby a value known as the Bell number, which exponentiallygrows with N [23]. Moreover, in a centralized partition searchapproach, the objective is typically to optimize the overallsystem performance while ignoring the individual preferencesand payoffs of the SUs (or coalition of SUs). Hence, for thecentralized approach, a particular SU might be asked to be partof a coalition S1, even if this SU, based on its own payoff,prefers to be part of another coalition S2. Since the SUs actindependently and are typically self-interested, they should begiven the choice of making their CF decisions on their own.Hence, there is a motivation to devise distributed approachesfor the SUs to make autonomous decisions, self-organize, andform the coalitional structure.
III. COLLABORATIVE SPECTRUM SENSING
AS COALITIONAL GAME
A. Game Formulation and Properties
To devise suitable cooperative strategies for CSS among theSUs, we refer to coalitional game theory [24]–[26]. We modeldistributed CSS as a coalitional game with a nontransferableutility (NTU), defined as follows [24].2
Definition 1: A coalitional game with NTU is defined by thepair (N , V ), where N is the set of players, and V is a mappingsuch that for every coalition S ⊆ N , V (S) is a closed convexsubset of R
S that contains the payoff vectors that players in Scan achieve.
In other words, a coalitional game (N , V ) is said to be withNTU if the value or utility of a coalition cannot arbitrarily beapportioned between the coalition’s players. Hence, the value
2This is the general definition of an NTU game as, per [24] and [25], someliterature may append other properties to the definition that are not useful forthe game class dealt with in this paper (for more information on the variousdefinitions of an NTU game, see [24]–[26]).
of any coalition S can be mapped to a set V of payoff vectors.First, we define the value (utility) v(S) of a coalition S ⊆ Nas a function that captures the tradeoff between the probabilityof detection and the probability of false alarm. For this purpose,v(S) must be an increasing function of the detection probabilityQd,S = 1 − Qm,S within coalition S and a decreasing functionof the false alarm probability Qf,S as follows:
v(S)=Qd,S−C(Qf,S , αS)=(1−Qm,S)−C(Qf,S , αS) (6)
where Qm,S is the probability of miss for coalition S given by(3), and C(Qf,S , αS) is a cost function that depends on the falsealarm probability Qf,S and on a false alarm constraint αS thatS must not exceed when it forms. Without loss of generality,we assume that αS = α ∀S ⊆ N .
In a coalitional game, one has to distinguish between twodistinct quantities: 1) the value function and 2) the payoff.Given a coalition S, the value function v(S) describes theoverall utility that the entire coalition S receives when actingcooperatively. In contrast, for any SU i ∈ S, the payoff φi(S)describes the utility that SU i receives when acting as part ofS. Hence, φi(S) represents the tradeoff between probability ofmiss and probability of false alarm that SU i achieves whenacting as part of coalition S. In the proposed CSS game, wehave the following property.
Property 1: The probabilities of miss and false alarm forany SU i ∈ S are given by the probabilities of miss and falsealarm of coalition S in (3) and (4), respectively. Hence, inthe proposed CSS game, the payoff φi(S) of any SU i ∈ S issimply equal to the value of the coalition, i.e., φi(S) = v(S)∀ i ∈ S. As a result, the false alarm constraint per coalition αmaps to a false alarm constraint per SU.
This property is an immediate result of the operation of CSS,whereby the SUs belonging to a coalition S will transmit ornot, based on the final coalition head decision after data fusion.Thus, the miss and false alarm probabilities of any SU i ∈ Sare the miss and false alarm probabilities of the coalition S towhich i belongs, as given by Qm,S and Qf,S in (3) and (4),respectively. As an immediate consequence of this property, wenotice that, in the proposed CSS game, the value of a coalition,i.e., v(S), is not divisible among the SUs since the payoff ofevery SU in S is equal to v(S) (and not to a fraction of v(S)).Hence, the proposed CSS game can be modeled as a coalitionalgame (N , V ) with NTU, where V (S) is a singleton set
V (S) ={φ(S) ∈ R
S |φi(S) = v(S) ∀i ∈ S}
(7)
with v(S) given by (6). (N , V ) is clearly an NTU game sincethe set V (S) is a singleton and hence closed and convex.
In a coalitional game with no cost, the main interest would bein characterizing the properties and stability of the grand coali-tion of all players since it is generally assumed that the grandcoalition maximizes the utilities of the players [24] (in such ano-cost case, concepts such as the core are suitable solutionsand additional properties for V may be required). However,for the proposed (N , V ) game, although CSS improves thedetection probability for the SUs, the false alarm costs limitthis gain, and thus, we make the following remark.
Remark 1: For the proposed (N , V ) coalitional game, thegrand coalition of all the SUs seldom forms due to the false

280 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
alarm costs resulting from cooperation. Instead, disjoint inde-pendent coalitions form in the network.
By inspecting Qm,S in (3) and through the results shownin [7] and [13] (for centralized CSS), it is clear that, as thenumber of SUs in a coalition increases, Qm,S decreases, and theperformance improves. Hence, when no cost for collaborationexists, the grand coalition of all SUs is the optimal structure tomaximize the detection probability. However, when the numberof SUs in a coalition S increases, through (3), the false alarmprobability increases and can exceed the constraint α, hencegiving no incentive for large coalitions to form and affecting thecollaboration strategies of the SUs. Therefore, for the proposedCSS model with cost for collaboration, the grand coalition of allSUs will seldom form due to the false alarm cost and constraint,as accounted for in (6). Due to this property, we deal with aclass of coalitional games known as CF games [25]. Hence, thesolution for the proposed (N , V ) CSS CF game is the networkstructure that can characterize the CSS tradeoff between gains(probability of miss) and costs (false alarm).
B. Cost Function
Any well-designed cost function C(Qf,S , α) in (6) must sat-isfy several requirements to adequately model the false alarm.On one hand, C(Qf,S , α) must be an increasing function ofQf,S with the slope becoming steeper as Qf,S increases. Onthe other hand, C(Qf,S , α) must impose a maximum tolerablefalse alarm probability α that cannot be exceeded by any SU(as per Property 1, imposing a false alarm constraint on thecoalition maps to a constraint per SU). A well-suited costfunction satisfying these requirements is the logarithmic barrierpenalty function given by [27]
C(Qf,S , α)=
⎧⎨⎩−α2 · log
(1−
(Qf,S
α
)2)
, if Qf,S <α
+∞, if Qf,S ≥α(8)
where log is the natural logarithm, and α is the false alarmconstraint per coalition. The cost function in (8) incurs a penaltythat is increasing with the false alarm probability. Moreover,it imposes a maximum false alarm probability α per coalition(per SU by Property 1). In addition, as the false alarm proba-bility gets closer to α, the collaboration cost steeply increases,requiring a significant improvement in detection probability ifthe SUs wish to collaborate as per (6). Note that the proposedcost function depends on both distance and the number ofSUs in the coalition through the false alarm probability Qf,S
(the distance lies within the probability of error). Hence, thecost for collaboration increases with the number of SUs in thecoalition as well as when the distance between the coalition’sSUs increases.
IV. COALITION FORMATION GAMES IN COLLABORATIVE
SPECTRUM SENSING
A. Distributed CF Algorithm
CF is a branch of game theory that investigates algorithms tostudy the coalitional structures that form in a network wherethere is a cost for forming coalitions and where the grand
coalition is not optimal [22], [25], [26], [28]. To constructa distributed CF algorithm for CSS, we use the followingconcepts [25], [28].
Definition 2: A collection S is the set S = {S1, . . . , Sl} ofmutually disjoint coalitions Si ⊆ N . If the collection spans allthe players of N , i.e.,
⋃lj=1 Sj = N , then the collection is a
partition of N .Definition 3: A comparison relation � is defined to compare
two collections R = {R1, . . . , Rl} and S = {S1, . . . , Sm} thatare partitions of the same subset A ⊆ N (same players in R andS). Thus, R � S implies that the way R partitions A is preferredto the way S partitions A based on criteria defined next.
Various criteria (referred to as orders) can be used as com-parison relations between collections or partitions [25], [28].Due to the nontransferable nature of the proposed (N , V ) CSSgame, an individual value order that compares the individualpayoffs of the players must be used as a comparison relation �.An adequate individual value order that can be used in CSSis the Pareto order [25], [28]. Denote for a collection R ={R1, . . . , Rl} the utility of a player j in a coalition Rj ∈ Rby φj(R) = φj(Rj) = v(Rj) (Property 1); the Pareto order isdefined as
R � S ⇐⇒ {φj(R) ≥ φj(S) ∀ j ∈ R,S} (9)
with at least one strict inequality (>) for a player k.Using the Pareto order as a comparison relation, we propose
a distributed CF algorithm based on two rules called “merge”and “split” that allow to modify a partition T of the SU set Nas follows [28].
Definition 4: Merge Rule: Merge any set of coali-tions {S1, . . . , Sl}, where {∪l
j=1Sj} � {S1, . . . , Sl}; therefore,{S1, . . . , Sl} → {∪l
j=1Sj}.Definition 5: Split Rule: Split any coalition ∪l
j=1Sj , where{S1, . . . , Sl} � {∪l
j=1Sj}; thus, {∪lj=1Sj} → {S1, . . . , Sl}.
Using the foregoing rules, multiple coalitions can interactand decide on whether to merge or split based on the com-parison relation �. For the Pareto order, coalitions decide tomerge (split) only if at least one SU is able to strictly improveits individual utility through this merge (split) process withoutdecreasing the other SUs’ utilities. Therefore, the merge rule byPareto order is a binding agreement among the SUs to operatetogether in the sensing phase if it is beneficial for them; thisagreement is partially reversible, i.e., can be reversed only byan agreement to split. Note that CF entails algorithms whereagreements can be either irreversible, partially reversible, orfully reversible [26]. As the algorithms become more reversible,their complexity and implementation can increase while theirflexibility improves, and this motivates using a partially re-versible algorithm such as the one we propose, which has abalance between implementation and flexibility [26].
In consequence, for the proposed CSS game, we build adistributed CF (CF) algorithm based on merge and split, whichis composed of three phases: 1) discovery; 2) adaptive CF;and 3) coalition sensing. In the first phase, each SU discoversneighboring SUs as well as information required to performCF, e.g., distance to the PU and distance of neighboring SUs.The discovery phase is discussed in detail in Section VI-A.

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 281
TABLE IONE ROUND OF THE PROPOSED CF ALGORITHM
Following the discovery phase, adaptive CF begins, and theSUs (or existing coalitions of SUs) interact to assess whetherto cooperate for sharing their sensing results with the discov-ered coalitions. For this purpose, an iteration of sequentialmerge-and-split rules occurs in the network, whereby eachcoalition decides to merge (or split) depending on the utilityimprovement. In this phase, as time evolves and SUs (or thePU) move, the SUs can autonomously self-organize and adaptthe network’s structure through new merge-and-split iterations,with each coalition taking the decision to merge (or split)subject to satisfying the merge (or split) rule through Paretoorder (9). In the final coalition sensing phase, once the networkpartition converges following merge and split, SUs that belongto the same coalition report their local sensing bits to theirlocal coalition head. The coalition head subsequently usesthe decision fusion OR-rule [7], [12], [13] to make a finaldecision on the presence or absence of the PU. This decisionis then reported by the coalition heads to all the SUs withintheir respective coalitions. One round of the CF algorithmis summarized in Table I, and the detailed operation is asfollows.
Each round of the three phases of the CF algorithm in Table Istarts from an initial network partition T0 = {T1, . . . , Tl} of N .Following neighbor discovery, each coalition Ti ∈ T0 can ac-quire the following information (see Section VI-A for details):
1) the probabilities of miss of the SUs in Ti, i.e., each SU inTi is aware of its own probability of miss;
2) the existence of other coalitions with which a potentialcooperation can be done. Hence, each coalition Ti ∈ T0
would have a list of all the other potential coalitions withwhich cooperation is possible;
3) the distances between the SUs in Ti and the SUs in thediscovered coalitions.
Following the acquisition of this information through thediscovery phase, the adaptive CF phase of the algorithm beginsand consists of the merge-and-split procedures. During themerge procedure, each SU (or coalition of SUs that wouldform afterward) engages in pairwise negotiations (i.e., one-on-one) with the discovered neighbors over a control channel. Oneexample of such a control channel is the ad hoc temporarycontrol channel [29] that can temporarily be established byeach SU (or coalition) for the purpose of negotiations (thesetemporary control channels are widely used in ad hoc net-works [29] and, more recently, in cognitive networks [29]–[32]). By signaling over the control channels, two coalitions (orSUs) can inform each other of the identities of their members(e.g., the identity can be defined by the member’s positionin space) and, in the event of a potential merge, can decideto join together into a single coalition. For example, at thebeginning of all time, when the network is noncooperative,following neighbor discovery, each SU i ∈ N can, over acontrol channel, start negotiating in a pairwise manner withthe other discovered SUs. When negotiating with a discoveredcoalition or SU, SU i can send its information and an intentto merge over the control channel. Subsequently, dependingon the Pareto order as per (9), the other coalition can re-spond with its own information and an approval or denial ofthe merge.
Essentially, the merge process occurs as follows: Given parti-tion T0, each coalition Ti ∈ T0 negotiates over a control channel(e.g., through its coalition head) with the list of neighborsto assess a potential merge. Proceeding sequentially throughthe list of discovered neighbors, each coalition head k ∈ Ti
attempts to merge with one of the discovered neighbors Tdisc
(at the beginning of all time all the discovered neighbors arenoncooperative SUs) as follows (the sequence of this procedureis assumed to be arbitrary, depending on which neighbor wasfirst discovered).
1) Coalition head k ∈ Ti ∀Ti ∈ T0 signals an intent tomerge with Tdisc by sending, over the control channel, theinformation (probabilities of miss and distance estimates)on its own coalition, i.e., Ti, to one of the SUs in thecoalition Tdisc.
2) The SU in Tdisc that receives this information computes,in cooperation with the members of its coalition Tdisc,the potential probability of miss that would result fromthe merge with Ti as per (3), and following this compu-tation, coalition Tdisc would respond to k with one of thefollowing results:a) If the Pareto order as per (9) is not verified, i.e., the
merger would decrease the payoff of one or morecoalition members in Ti or Tdisc, then Tdisc respondswith a small packet signaling the failure of the merger,as well as providing information on its current mem-bers. The information on the current members allowsk and Ti to get a better idea of the existing partitionfor future merge decisions.
b) If the Pareto order as per (9) is verified, i.e., coop-eration improves the payoffs of the involved SUs,then Tdisc responds with a small packet signalingthe acceptance of the merger, as well as providing

282 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
information on its current members. Subsequently,the two coalitions would merge into a new coali-tion Tnew ∪ Tdisc, and they would be aware of eachother following the negotiation phase. Subsequently,the new coalition Tnew would repeat the foregoingprocedure, given the union of the lists of neighborsfrom Ti and Tdisc.
3) Coalition Ti continues the foregoing procedure until itmerges or until no further merge possibility exists.
Hence, two coalitions would merge through negotiationsover a control channel, and they can inform each other ofthe identities of their members over this channel when theforegoing merge procedure is taking place. Note that, althoughwe consider that the order in which the SUs discover theirneighbors (and goes through them for merge) is arbitrary, onecan always define other metrics, such as the average distancebetween the members, which can be used as a distance be-tween coalitions and, subsequently, used to order the discoveredneighbors. In many cases, from the perspective of a coalitionS, any neighbor discovery algorithm is likely to find coalitionswhose members are at a closer distance from the members of Sbefore those who are located far away.
Moreover, the aforementioned procedure shows that, in gen-eral, the SUs do not need to estimate the probability of missof their neighbors. In contrast, during the pairwise mergesearch, each SU (or coalition) would append the values of theprobabilities of miss of its members along with the intent tomerge message that is sent to one of its neighbors. In response,the neighbor can communicate, along with the merge decision,the information on the probability of miss of its members.3
Certainly, we assume that each SU is aware of its own prob-ability of miss, and the methods that each SU can use to find itsown probability of miss are discussed in detail in Section VI-A.Note that, once the SUs of the two coalitions exchange theirprobabilities of miss, they would be able to work out whichmember is potentially the coalition head, as per Convention 1.
Following the merge process, the coalitions are next subjectto split operations, if any is possible. Hence, any coalition thatcan no longer merge would start to apply the split operation.As the members are part of the same coalition, assessment ofthe payoffs yielded by a split form is easily performed sincethe members are aware of the identities and characteristics oftheir partners. An iteration consisting of multiple successivemerge-and-split operations is repeated until it terminates (theconvergence of an algorithm constructed using merge-and-splitrules is guaranteed [28]). It must be stressed that the merge orsplit decisions are taken in a distributed way without relying onany centralized entity as each SU or coalition makes its ownmerge or split decisions.
The merge-and-split procedure of Phase 2 is sequentiallyperformed for all coalitions in the network in a certain order (inpractice, there is always a fraction of time of difference betweenthe action of a coalition/SU or the next one, which dictates anorder of operation). The order in which the coalitions/SUs act
3In case the SUs, using the techniques of Section VI-A, are able to estimatethe probability of miss of their neighbors, they may be able to reduce theinformation exchange overhead.
is considered arbitrary, which is often the case in a practicalcognitive network. As a result, any arbitrary SU (or coalition)can initiate the merge-and-split procedures. Hence, once theSUs have operated noncooperatively for a while and performedthe discovery phase, they would start, in an arbitrary order, toperform CF in Phase 2 through merge and split. In general,all SUs will always have an incentive to seek cooperationsince it might improve their payoff. Nonetheless, the proposedalgorithm is always applicable, regardless of the order in whichthe SUs/coalitions act, and thus, a network operator can imposea certain order for CF on its SUs if needed (e.g., let the SU withthe worst or best performance start and so on).
Further, it is interesting to note that, under certain conditions(see Section IV-B and Lemma 1) on the network partition, theorder of operation does not affect the final structure that willform in the network. Nonetheless, even when different orderscan yield different network structures, due to the definition ofthe merge-and-split operation through the Pareto order in (9),it is always ensured that any resulting partition would improvethe payoffs of the SUs, as compared with the previous state.This is due to the fact that any merge or split agreement makessure that at least one SU benefits from this operation. Hence, theproposed merge-and-split algorithm, independent of the order,is guaranteed to yield a cooperative network that outperforms(or is at least as good as) the noncooperative approach.
For handling environmental changes such as mobility (ofthe SUs or the PU) or the joining/leaving of SUs, Phase 2 ofthe proposed algorithm in Table I is periodically repeated overtime. In Phase 2, periodically, as time evolves and SUs (or thePU) move or join/leave, the SUs can take distributed decisionsto adapt the network’s structure through new merge-and-splititerations, with each coalition taking the decision to merge (orsplit) subject to satisfying the merge (or split) rule through thePareto order in (9).
For this purpose, one can define a period of time θ thatspecifies the time elapsed between two consecutive runs ofthe proposed CF algorithm. Consequently, there would be atradeoff between the number of runs, i.e., overhead for CF andthe adaptation to the dynamics of the environment. Hence, forenvironments that are static or varying very slowly, θ wouldbe large. In contrast, for highly varying environments, θ wouldhave a small value, thus enabling adaptation to rapidly changingenvironments. The value of θ can be regulated by the SUs de-pending on their observations on the environment. For example,given an initial value of θ = θ0, whenever the SUs notice that,during merge and split, a lot of changes in the network and thepartition have occurred, they can decide to reduce θ to a valuesmaller than θ0. In contrast, whenever the SUs note that fewchanges have occurred, they can increase θ to a value aboveθ0. For example, the possible values for the period θ can bestandardized so that the SUs would know it without the need fora centralized controller. The preceding procedure would ensurethe convergence of the merge-and-split algorithm. Nonetheless,certainly, we only consider environments where the changesduring a single run of the proposed algorithms are small enoughto not drastically affect the utilities and, thus, the merge or splitdecisions of the SUs. Note that performing instantaneous CFis still a challenging task in game theory (e.g., see [26] and

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 283
references therein) and can be considered in future extensionsof this paper.
It must also be noted that almost no synchronization amongthe SUs is needed to perform CF since the order in whichthe merge-and-split operations proceed can be arbitrary (orsynchronized if an operator wishes to do so). In some sense,the SUs would only need some kind of quasi-synchronizationfor handshaking and negotiations over the control channel tocommunicate their spectral sensing information. The proposedmerge-and-split CF process involves negotiations that occur in apairwise manner with coalitions (or SUs) in a small neighboringarea and not in the entire network. In addition, as soon as acoalition identifies a merge possibility, it does not need to gothrough the remainder of the discovered neighbor. This aspectfurther corroborates the little need for synchronization amongthe SUs.
To show that the SUs need to survey only a specific geo-graphical area for finding merge partners without looking atall other possible SUs in the network, we inspect the differentmerge possibilities between two SUs. In this regard, giventwo SUs involved in CSS through CF, we have the followingtheorem (see the proof in the Appendix).
Theorem 1: Two SUs i and j with noncooperative probabil-ities of miss Pm,i and Pm,j , respectively, such as Pm,i ≤ Pm,j ,can merge into one coalition if the probability of error is belowa maximum probability of error, i.e., if Pe,j,i ≤ Pe,j,i, wherePe,j,i is given by the following tight approximation:
Pe,j,i≈Pf (Pf −2)+α
√(1−
(1− P 2
f
α2
)e
Pm,i(1−η)(Pm,j−1)
α2
)(2Pf −1)(Pf −1)
(10)
with η = α if Pm,j ≤ (1/2), and η = 0 otherwise. Conse-quently, a corresponding minimum distance di,j between thetwo SUs can easily be found by solving (5) for Pe,j,i.
From Theorem 1, each SU i can determine merge regions,corresponding to arcs on circles and their respective intercept-ing angles, for forming a coalition with an SU j, where Pm,i ≤Pm,j . For a given detection threshold λ, one can see through(1) that each Pm,j corresponds to one circle centered at the PUwith a radius rj , hence determining a class of SUs having thesame noncooperative probability of miss. For each such circle,an SU i maps the condition Pe,j,i ≤ Pe,j,i to an arc on thesecircles with a corresponding intercepting angle (angle centeredat SU i) and intercepting the merge region arc. However, forany two SUs i and j belonging to two circles of radii ri andrj , the distance di,j between the two SUs (from Theorem 1)must satisfy di,j < (rj − ri); otherwise, no merge is possible(the merge region is empty). A detailed analysis of these mergeregions, using Theorem 1, is presented in Section VII. Notethat, even if no closed-form expression exists for the upperbound Pe,j,i, Pe,j,i will always be bounded by a value Pe,j,i,which would be a function of the probabilities of miss and falsealarm of the two SUs. This is a direct consequence of the factthat, whenever the error on the reporting channel increases, itwill incur an increased probability of miss and an increasedfalse alarm as per (3) and (4), which, in turn, would limit the
gains from cooperation and sets an upper bound on the errorlevel that would be tolerated for the merge to occur.
An upper bound on the maximum coalition size is imposedby the proposed utility and models as follows.
Theorem 2: For the proposed CSS model, given that theSUs collaborate for improving their payoff given the tradeoffbetween probability of miss and false alarm, any coalitionalstructure resulting from the distributed CF algorithm will havecoalitions limited in size to a maximum SU of
Mmax =log(1 − α)log(1 − Pf )
. (11)
Proof: In the proposed algorithm, the benefit from collab-oration is limited by the false alarm probability cost modeledby the barrier function (8). A minimum false alarm cost ina coalition S with coalition head k ∈ S exists whenever thereporting channel is perfect, i.e., exhibiting no error; hence,Pe,i,k = 0 ∀i ∈ S. In this perfect case, the false alarm proba-bility in a perfect coalition Sp is given by
Qf,Sp= 1 −
∏i∈Sp
(1 − Pf ) = 1 − (1 − Pf )|Sp| (12)
where |Sp| is the number of SUs in the perfect coalition Sp.A perfect coalition Sp, where the reporting channels insideare perfect (i.e., SUs are grouped very close to each other),accommodates the largest number of SUs relative to all othercoalitions. Hence, we use this perfect coalition to find anupper bound on the maximum number of SUs per coalition.For instance, the log barrier function in (8) tends to infinitywhenever the false alarm constraint per coalition is reached,which implies an upper bound on the maximum number of SUsper coalition if Qf,Sp
≥ α, yielding, by (12), |Sp| ≤ (log(1 −α)/ log(1 − Pf )) = Mmax. �
It is interesting to note that the maximum size of a coalitionMmax mainly depends on two parameters: 1) the false alarmconstraint α and 2) the noncooperative false alarm Pf . For in-stance, larger false alarm constraints allow larger coalitions, asthe maximum tolerable cost limit for collaboration is increased.Moreover, as the noncooperative false alarm Pf decreases, thepossibilities for collaboration are better since the increase of thefalse alarm due to coalition size becomes smaller, as per (4). Itmust be noted that the dependence of Mmax on Pf yields adirect dependence of Mmax on the energy detection thresholdλ, as per (2). Finally, it is interesting to see that the upper boundon the coalition size does not depend on the location of theSUs in the network nor on the actual number of SUs in thenetwork. Therefore, deploying more SUs or moving the SUs inthe network for a fixed α and Pf does not increase the upperbound on coalition size.
B. Partition Stability
The result of the proposed algorithm is a network partitioncomposed of disjoint independent coalitions of SUs. The sta-bility of this resulting network structure can be investigated bya defection function D [28].

284 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
Definition 6: A defection function D is a function that asso-ciates with each partition T of N a group of collections in N .A partition T = {T1, . . . , Tl} of N is D-stable if no group ofplayers is interested in leaving T when the players who leavecan only form the collections allowed by D.
Two defection functions are of interest: 1) a Dhp function thatassociates with each partition T of N the group of all partitionsof N that can form by merging or splitting coalitions in T and2) the Dc function that associates with each partition T of N thegroup of all collections in N . Two forms of stability stem fromthese definitions: 1) Dhp-stability and 2) a stronger Dc-stability.A partition T is Dhp-stable if for the partition T no coalitionhas an incentive to split or merge. As an immediate result of thedefinition of Dhp-stability, we have that every partition resultingfrom our proposed CF algorithm is Dhp-stable. Briefly, a Dhp-stable can be thought of as a state of equilibrium where nocoalitions have an incentive to pursue CF through merge orsplit.
With regard to Dc-stability, a Dc-stable partition has thefollowing properties [28]: 1) In a Dc-stable partition T , noplayers are interested in leaving T to form other collectionsin N (through any operation). 2) If it exists, then a Dc-stablepartition is the unique outcome of any arbitrary iteration ofmerge and split and is a Dhp-stable partition. 3) A Dc-stablepartition T is a unique �-maximal partition, that is, for allpartitions T ′ �= T of N , T � T ′. When � is the Pareto order, theDc-stable partition presents a Pareto optimal utility distribution.
However, the existence of a Dc-stable partition is not alwaysguaranteed [28]. The Dc-stable partition T = {T1, . . . , Tl}of the whole space N exists if a partition of N that ver-ifies the following two necessary and sufficient conditionsexists [28]:
(i) For each i ∈ {1, . . . , l} and each pair of disjoint coali-tions S1 and S2 such that {S1 ∪ S2} ⊆ Ti, we have{S1 ∪ S2} � {S1, S2}.
(ii) For the partition T = {T1, . . . , Tl}, a coalition G ⊂ Nformed of players belonging to different Ti ∈ T is T -incompatible if for no i ∈ {1, . . . , l}, we have G ⊂ Ti.Dc-stability requires that for all T -incompatible coali-tions {G}[T ] � {G}, where {G}[T ] = {G ∩ Ti ∀ i ∈{1, . . . , l}} is the projection of coalition G on T .
If no partition satisfies these conditions, then no Dc-stablepartitions of N exist. Nevertheless, we have the followinglemma.
Lemma 1: For the proposed (N , V ) CSS coalitional game,the proposed CF algorithm converges to the optimal Dc-stablepartition if such a partition exists. Otherwise, the final networkpartition is Dhp-stable.
Proof: The proof is immediate due to the fact that, when itexists, the Dc-stable partition is a unique outcome of any merge-and-split iteration [28], such as any partition resulting from ourCF algorithm. �
For the proposed game, the existence of the Dc-stable par-tition cannot always be guaranteed, although the algorithmwould always converge to this partition when it exists. Givena partition T = {T1, . . . , Tl} of SUs, verifying condition (i) for
Dc-stability implies that, for any coalition Ti ∈ T , the Paretoorder, as per (9), must be verified for the union of every pairof subcoalitions of Ti, which, in the context of collaborativesensing, directly maps into a condition dependent on the dis-tances between the SUs inside Ti and their noncooperativeprobabilities of miss and false alarm [due to the utility in (6)].For example, if Ti is a coalition of size 2, then condition (i)implies that Theorem 1 and (10) must be verified between thetwo SUs of Ti. Further, if Ti is a coalition of size 3, thencondition (i) implies the following:
(a) The distance between every pair of SUs in Ti must satisfy(10) and Theorem 1.
(b) The distances and probabilities of miss and false alarmof the SUs in Ti must satisfy the merge rule using thePareto order in (9) (in any direction).
Consequently, simple examples of partitions satisfying con-dition (i) of Dc-stability would be a partition solely composedof coalitions of size 2, which verifies (10) and Theorem 1, apartition T composed of coalitions of size 3 that verifies (a)and (b), or a partition composed of a mixture of coalitions ofsize 2 or 3 satisfying the requirements previously stated.Certainly, for larger coalitions, condition (i) imposes restric-tions on the distances and probabilities of miss and false alarmof the cooperating SUs analogous to (10), (a), and (b).
The difficulty of guaranteeing a Dc-stable partition inthe context of collaborative sensing stems from the diffi-culty of computing a closed-form solution that characterizescondition (ii). For a partition T , condition (ii) deals withT -incompatible coalitions, which are coalitions composed ofplayers belonging to different coalitions Ti ∈ T . To clarifythis requirement, consider a three-player game and a partitionT = {{1, 2}, {3}}. For this case, the T -incompatible coalitionsare G1 = {2, 3}, G2 = {1, 3}, and G3 = {1, 2, 3}. For everyGi, condition (ii) requires that {Gi ∩ {1, 2}, Gi ∩ {3}} � {G},which maps into the following:
(A) {{2}, {3}} � {2, 3}, which implies that SUs 2 and 3 mustnot verify (10), as per Theorem 1.
(B) {{1}, {3}} � {1, 3}, which implies that SUs 1 and 3 mustnot verify (10), as per Theorem 1.
(C) {{1, 2}, {3}} � {1, 2, 3}, which implies that the Paretoorder must not be satisfied, i.e., forming coalition{1, 2, 3} decreases the payoff of at least one of the SUs.
Consequently, for the three-player example, verifying con-dition (ii) for the existence of a Dc-stable partition mainly de-pends on the distances between the three SUs and their locationwith respect to the PU (through the probability of miss), as perTheorem 1. For larger networks, satisfying condition (ii) wouldonce again depend on the distances between the SUs ofT -incompatible coalitions; however, the number of such coali-tions becomes large, and thus, mapping the requirement intoclosed-form conditions such as in Theorem 1 would be diffi-cult. Note that, for the three-player example previously men-tioned, in the event where (A)–(C) are satisfied, and if {1, 2}satisfies (10), then partition T = {{1, 2}, {3}} would verify

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 285
conditions (i) and (ii), and thus, it will be a Dc-stable partitionand a unique outcome of the proposed algorithm.
In summary, to verify condition (i) for the existence of theDc-stable partition, the SUs belonging to partitions of eachformed coalition must verify the Pareto order as per (9) usingtheir utility defined in (6). Similarly, for verifying condition (ii)of Dc-stability, SUs belonging to all T -incompatible coalitionsin the network must verify the Pareto order. As shown in theprevious examples, as well as through Theorem 1 (for twoSUs), this existence is closely tied to the location of the SUsand the PU [due to the dependence on the individual miss andfalse alarm probabilities in the utility expression (6)], whichboth can be random parameters in practical and large networks.Nonetheless, the proposed algorithm will always guaranteeconvergence to this optimal Dc-stable partition when it exists,as stated in Lemma 1. Whenever a Dc-stable partition doesnot exist, the coalition structure resulting from the proposedalgorithm will be Dhp-stable as no coalition or SU is able tomerge or split any further (can be viewed as a kind of partitionequilibrium).
V. DISTRIBUTED COALITION FORMATION WITH
DETECTION PROBABILITY
The previously proposed CF algorithm in Section IV allowsthe SUs in a cognitive network to minimize their probability ofmiss under false alarm constraints. In such a scenario, one cansee the PU rewarding the SUs as much as they improve theirdetection and reduce their interference level, hence providingan incentive for the SUs to lower their probability of miss asmuch as possible. However, in some cognitive networks, inaddition to the false alarm constraint that the SUs require, thePU (or PU operator) imposes a desired detection probabilityχ that the SUs must meet (i.e., a desired interference level)[3]. The PU introduces such constraints to control the amountof interference that is allowed by SUs or to limit and controlthe number of SUs that are allowed to use the spectrum. Thepresence of such an additional constraint can affect the behaviorof the SUs, their incentives, and their collaboration strategies.Hence, the CF process must be adequately modified to copewith the presence of such an additional detection probabilityconstraint as the objective of the SUs is no longer to minimizetheir probability of miss but rather to achieve the desiredprobability of miss γ = 1 − χ (while meeting the false alarmconstraint). In this context, during a merge or split process,once a coalition achieves the probability of miss γ, it willhave no further incentive to pursue the CF process. In fact,in the presence of detection probability constraints, once acoalition achieves γ, increasing the size of the coalition incursan increased false alarm (within the constraint α), as well asextra signaling and sensing time with no extra benefit for thecoalition members.
To appropriately capture these new objectives in the CFprocess, we introduce, adjunctly with the proposed (N , V )coalitional game, a simple voting game [33] that is defined asa coalitional game with utility function u : 2N → {0, 1}. Byintroducing this simple voting game in the CF process, the newobjectives of the SUs, i.e., probability of detection guarantees,can be accommodated, as will be seen later in this section.
For this purpose, we define the adjunct utility function u asfollows:
u(S) ={
1, if Qd,S ≥ χ and Qf,S ≤ α0, otherwise.
(13)
This definition captures the two objectives of the SUs:1) satisfying the probability of detection χ and 2) maintaininga false alarm level below α, i.e., keeping Qf,S ≤ α. Thus, in(13), u(S) = 1 if the probability of detection satisfies χ and thefalse alarm constraint is not violated. For a coalition S whereQf,S > α, as per (6), the utility goes toward negative infinity,and thus, a coalition with Qf,S > α can never form; hence, inthis case, u(S) = 0. As will be seen later in this section, as willbe seen later in this section, the SUs can utilize both utilities Vand u in (7) and (13) to make their cooperative decisions giventhe objective of achieving the target probability of detectionwhile making sure that doing so benefits them, as per (7), whilethe false alarm constraint is not violated. Further, within theproposed adjunct simple voting game framework, we have thefollowing definition.
Definition 7: In the proposed CSS game, a coalition S is saidto be winning if u(S) = 1, and losing otherwise. Similarly, aplayer is winning if it is part of a winning coalition, and losingotherwise.
Consequently, under a desired probability of detection con-straint, the objective is to maximize the number of winningplayers while minimizing the cost in terms of false alarm (giventhe false alarm constraint α) as well as the signaling overheadwithin each formed coalitions. In this regard, the partitionstability concepts introduced in Section IV-B are no longeradequate to assess the performance of the system since the SUsare no longer looking to maximize their utilities but rather toform winning coalitions. Therefore, a more adequate notion forstability is needed through the following concept.
Definition 8: In a simple voting game (N , u), a coalition Sis said to be minimal winning if the defection of any player inS renders that coalition losing. In other words, an MWC S is acoalition such that u(S) = 1 & u(T ) = 0 ∀T ⊂ S.
From this definition, it follows that, to achieve the detec-tion probability χ with minimum overhead, the SUs have anincentive to form MWCs. Using Definition 8 and (13), one cansee that, whenever a group of SUs form an MWC, they haveno incentive to leave this MWC. In fact, when an SU leavesan MWC, as per Definition 8, this SU becomes losing, i.e., itsadjunct utility u becomes 0. Thus, an MWC is highly suitableto characterize the coalitional structure that forms when bothfalse alarm and detection probability constraints are required.Moreover, once the SUs form an MWC, they have no furtherincentive to decrease their probability of miss (which can incurextra false alarm) as they already comply with the requirementsset by the PU.
Jointly with the merge-and-split operations, we define a newoperation on the coalitions as follows.
Definition 9: Adjust Rule: For any coalition S ⊆ N , theadjust rule is defined as follows:
CS = Adjust(S) ={
S, if u(S) = 0{SMWC, i1, . . . , ik
}, if u(S) = 1
(14)

286 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
where SMWC is the MWC generated out of a winning coalitionS by simply excluding all players i ∈ S such that u(S) =u(S \ {i}) = 1, and {i1, . . . , ik} is the collection of individualSUs ij that were excluded from S by the adjust operation.
The exclusion of the players from a winning coalition toyield an MWC can be done in any order. For the proposed CSSgame, we adopt the following convention without any loss ofgenerality.
Convention 2: The adjust operation generates an MWC froma winning coalition S by excluding the players i ∈ S suchthat u(S) = u(S \ {i}) = 1 (note that u(∅) = 0 by definitionof any characteristic function) in a sequential manner by anincreasing order of their noncooperative probability of missPm,i. In other words, the SUs verifying u(S) = u(S \ {i}) = 1and having the smallest noncooperative probability of missare excluded first, and their collection constitutes {i1, . . . , ik}.The motivation behind this convention is that, once and ifexcluded, SUs with a small noncooperative probability of misshave higher chances (than SUs with larger miss probabilities)of finding other partners with whom to form an MWC.
Having defined the necessary new concepts, the CF Phase 2of the proposed CF algorithm in Table I can easily be modifiedby introducing the adjust operation. In this regard, Phase 2of the algorithm in Table I is split into two phases: Phase 2aand Phase 2b. In Phase 2a, an adjust operation is applied toevery coalition in the network partition prior to merge andsplit, which results in a partition T0 that can be divided intotwo collections: 1) a collection W0 with MWCs only and2) a collection L0 with the remaining coalitions. In Phase2b, adaptive CF through merge and split is applied only topartition L0. Nonetheless, in Phase 2b of the algorithm, theadjust operation needs to be further incorporated within mergeand split. For instance, whenever a coalition forms by merge(or by split), it is subject to an adjust operation. In the eventwhere a formed coalition is winning and the adjust operationresults in an MWC, this MWC no longer participates in anyfuture merge or split. However, any SUs excluded from thecoalition through the adjust operation continue to participatein merge and split. Consequently, the adaptive CF processterminates by resulting in two collections: 1) a collection Wf
having only MWCs and 2) another collection Lf with losingcoalitions that can no longer be subject to any merge, split, oradjust operations. The final network partition is simply F =W0 ∪Wf ∪ Lf . The convergence of the CF-PD algorithm tothis final network is guaranteed since the presence of the adjustoperation (which is an operation internal to each coalition) inPhase 2b does not affect the convergence of the merge-and-splititerations that were assessed in Section IV, since this conver-gence is independent of the starting partition. This algorithm isreferred to as the distributed CF algorithm with probability ofdetection guarantee (CF-PD) algorithm and is summarized inTable II. Note that, in the final network, the SUs that belongto the collection of losing coalitions Lf have improved theirsensing performance compared with their noncooperative state;however, they would need to wait environmental changes, suchas mobility or the arrival of new SUs, to become winningSUs/coalitions, i.e., meet the required probability of detectionconstraint χ through cooperation.
TABLE IIONE ROUND OF THE PROPOSED CF-PD ALGORITHM
VI. DISTRIBUTED IMPLEMENTATION OF COALITION
FORMATION AND COALITION FORMATION WITH
DETECTION PROBABILITY
In this section, we discuss and present some of the challengesfor the implementation of the proposed CF and CF-PD algo-rithms in practical cognitive networks.
A. Neighbor Discovery
In the first phase of the CF and CF-PD algorithms, fordiscovering their neighbors, each coalition (or single SU) needsto utilize neighbor discovery techniques to discover potentialcooperation partners for performing the local merge. In otherwords, each coalition in the network surveys neighboring coali-tions within merge range and attempts to merge according tothe Pareto order. For performing merge, the SUs are required toknow their own probabilities of miss and their distance to theneighbors to assess the potential utility that they can acquireby collaboration, which is given by (6). Note that, although, toassess (6), the SUs need to also learn the probability of missof their neighbors, i.e., the distance between the neighbors andthe SU, this information can be sent by the neighbors overa control channel during the negotiation phase of the mergeprocess. Hence, the SUs do not necessarily need to estimatethis value by themselves.
In Rayleigh fading, the noncooperative probability of missis mainly a function of the average SNR to the PU and,hence, the distance to the PU, as seen in (1). Consequently, forperforming CF, the main information that needs to be gatheredby the SUs consists of the distances between these neighbors,as well as the distance between the PU and the SU. To find

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 287
this information, numerous methods are available for the SUsin practical cognitive networks:
1) information received through control channels in cog-nitive networks such as the recently proposed cognitivepilot channel (CPC) [34]–[38];
2) signal processing-based methods [3], [15], [32], [39],[40];
3) existing ad hoc routing neighbor discovery techniquesapplied in cognitive network [29]–[32];
4) geolocation techniques [2], [41]–[44].
1) Neighbor Discovery Through Control Channels: Tomaintain a conflict-free environment between the SUs andPUs of a cognitive network, there has been recent interest inproviding, through control channels, assistance to the SUs onboth spectrum sensing and access levels by providing usefulinformation that the SUs can use to improve their performance.For example, in [34], a control channel called the common spec-trum coordination channel has been proposed for the announce-ment of radio and service parameters to allow a coordinatedcoexistence between SUs and PUs. Following a similar concept,the CPC has recently been proposed [35]–[38] as a means toprovide frequency and geographical information to cognitiveusers, assisting them in sensing and accessing the spectrum.Notably, the CPC can assist the SUs to discover neighboringPUs and SUs in the presence of multiple access technologiesand heterogeneous environments. Thus, as explained in [35]–[37], the CPC is a control channel that carries information suchas available spectrum opportunities, existing PUs, or geograph-ical information on neighboring SUs. A CPC channel can bedeployed in a cognitive network by either a broadcast manner,i.e., a station that broadcasts the CPC to all of its users, or anon-demand manner, i.e., the CPC information is sent to the SUsupon request. In this paper, the CPC can be delivered to the SUsby the receivers or a stand-alone spectrum broker, which is ableto obtain information on the existing SUs, PUs, or other neededCPC details. Following the formation of a coalition, an SU canalso signal to its receiver or to the broker its membership in acoalition, which is an information that can further be appendedto the CPC.
Consequently, by listening to the CPC transmission, the SUscan discover their own probabilities of miss (i.e., their distancesto the PU), the presence of neighboring SUs, the distance toother SUs, and possibly the coalition memberships of theseSUs. Since various efficient implementations of the CPC orother information control channels for cognitive networks areubiquitous, then using these channels, the SUs can acquirethe needed information for forming coalitions through CF orCF-PD with a reasonable overhead.
2) Signal-Processing-Based Methods: In Rayleigh fading,discovering neighboring nodes and finding an estimate ofthe distances to these nodes can be achieved through signalprocessing techniques [40] by computing the average receivedpower from the neighboring SUs and from the PU. To do so,in the proposed model, prior to any CF, i.e., in Phase 1 ofthe algorithm, each SU can attempt to compute the averagereceived power while listening to a control channel, for exam-ple. Another approach would be for the SUs to estimate this
average received power during the operation of the networkprior to CF. In other words, in a given initial partition T0, theSUs start by performing spectrum sensing and then use theresults to access the channel. During spectrum access, the SUscan monitor the transmission received from other SUs and thendiscover existing SUs in the network as well as the distance tothese SUs through an estimation, using signal processing-basedmethods, of the average received SNR from these SUs. Thisinformation on the neighbors and the distances to them will beuseful for the SUs to take adequate CF decisions in Phase 2 ofthe algorithm. It must be stressed that the use of received powerestimates for neighbor discovery is quite common, as shown in[3], [15], [32], [39], and [40].
The measured mean received power from the PU (whosetransmission is always monitored by the SUs for cognitiveradio access) can be used by every SU to find its individualprobability of miss. For instance, in this paper, we mainlydeal with the probability of miss averaged over the small-scale Rayleigh fading, as given in (1), which is common inmany cognitive radio literature, e.g., [7]–[10], [12]–[15], andthe references therein. By closely inspecting (1), one wouldsee that, for a given time–bandwidth product m and detectionthreshold λ, the probability of miss of an SU mainly dependson the average received SNR from the PU signal, which is afunction of the path loss and, thus the distance between SU andPU. Typically, an SU only needs to average the received powerfrom the PU over several samples to compute this average (withrespect to fading) SNR. Therefore, an SU can use the measuredmean received power from the PU to estimate its distance tothe PU (or the average SNR) and, subsequently, its individualprobability of miss. For a coalition of SUs, each member canfind its own individual probability of miss, and consequently,since the SUs of a coalition are aware of the location of eachother, they can work out the potential probability of miss oftheir coalition, as per (3).
Finally, note that, using signal-processing techniques to dis-cover neighboring SUs, a coalition of SUs Ti ∈ T only needsto discover SUs in a small geographical area around it (sinceotherwise no potential merge is possible as demonstrated forexample in Theorem 1 for the 2-SU case) and does not needto know to which coalitions each SU belongs. The informationon the membership of the SUs into a coalition can be foundout in subsequent pairwise interactions over a control channelbetween the coalition Ti and its discovered neighboring SUs(since each SU knows which coalition it belongs to).
3) Existing Ad Hoc Routing Discovery Techniques Appliedin Cognitive Networks: Over the past decade, techniques forneighbor discovery have been widely spread in the context ofad hoc routing [29], whereby numerous methods for findingneighboring nodes and information on these nodes are devel-oped. Recently, these approaches have been leveraged to pro-vide neighbor discovery in cognitive radio networks [30]–[32].
While an in-depth study of these neighbor discovery tech-niques is beyond the scope of this paper, we will provide asimple example of such techniques that can assist the SUs forthe purpose of CF. For instance, one popular idea for neighbordiscovery is the use of methods based on the well-known on-demand distance vector protocol of ad hoc routing [32]. In this

288 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
protocol, each node periodically broadcasts a “Hello” packet todetect its neighbors. In a cognitive network, several methodsbased on this idea can be used by the SUs to discover the PUsor other SUs. As shown in [32], to do so, each SU can establishan ad hoc temporary control information channel over which itbroadcasts its “Hello” packet, which contains the SU’s mobileIP address, location information, frequencies of all ad hoctemporary control channels, exact time when SU will tune toad hoc channels to listen for reception, transmission schedulesof “Hello” messages, time stamp according to its internal clock,coalition membership, or other information. Several techniquesfor transmitting the “Hello” packets are given in [32]. Uponreceiving the “Hello” message, an SU can adjust its owntransmission power according to the distance calculated fromthe information contained within the broadcasted “Hello” mes-sage and then broadcast a “Hello Ack” message with its owninformation. Using this “Hello” and “Hello ACK” procedure,the SUs can discover each other [32] and, subsequently, engagein a CF process.
Beyond this idea, numerous other techniques for cognitiveradio neighbor discovery, using similar concepts from ad hocrouting discovery, can be found in [30] and [31] (and referencestherein), along with their details. By adopting any of thesetechniques, the neighbor discovery phase of the proposed CFalgorithm can be implemented, allowing the SUs to gather anyneeded information for the merge-and-split phase.
4) Geolocation Techniques: In some cognitive networks, toimprove the coexistence between the secondary and primarynetworks, the SUs are required to register and connect, throughthe Internet, to incumbent databases [41]–[44]. The principalpurpose of this requirement is to provide a mechanism to informSUs about their neighboring SUs or PUs [41]. These databasescan hold information on the PUs, the SUs, their positions, theircapabilities, and so on. For the purpose of CF, the databasesmay also hold a field that displays the coalition membership ofthe SUs, if any.
The information in these databases is entered either auto-matically by every SU or PU that enters the network or by acentralized administrator that controls these databases [41]. Inthis context, the need for knowing the position of the nodes(SU or PU) prior to filling the database is required. For fixedSUs or PUs, obtaining this information to fill the databasesis straightforward. However, when the SUs or PUs are mo-bile devices, two cases can be distinguished. In an outdoorenvironment, the SUs or PUs can use techniques based onGPS to obtain their own locations and update the databases.If no GPS is available or the nodes are indoor, then finding theposition becomes more challenging. In this case, the nodes canuse advanced positioning techniques such as reference anchors[41], the signal processing techniques in Section VI-A2, orother techniques [42]–[44].
Although the technical details on building the databases arebeyond the scope of this paper (see [41]–[44] and the referencestherein), nonetheless, for CF, the SUs can access the databasesto discover the position of the PU or their neighboring SUs, oreven the coalition memberships of the neighbors. By doing so,the SUs would obtain all the necessary information for the CFphase of CF or CF-PD.
In summary, neighbor discovery techniques for cognitiveradio networks are abundant. For the proposed CF algorithm,any of these techniques can be adopted in Phase 1 as they allallow the SUs to obtain estimates of the needed information forthe CF phase. Certainly, there is a tradeoff between accuracyand complexity for each of these techniques; however, for CF,one can adopt any technique with a reasonable tradeoff (e.g.,the CPC or the signal processing techniques), as long as it canconvey enough information on the neighboring SUs and the PUin the network.
Hence, once these parameters are estimated using eitherthe received power estimation, geolocation techniques, or theCPC, the coalitions (or individual SUs) can then decide on thepartners, if any, with whom they can cooperate (merge) forspectrum sensing. Moreover, with regard to the split operation,each formed coalition can internally make the decision to splitor not, depending on whether its members can find a split formthat is preferred by the Pareto order.
B. CF Operations: Merge, Split, and Adjust
The complexity of the CF phase of the proposed CF al-gorithm mainly lies in the complexity of the merge-and-splitoperations. It is important to stress that the complexity of thealgorithm is independent of whether a Dc-stable partition existsor not. For instance, as per Lemma 1 and as shown in [28],any implementation of the merge-and-split algorithm wouldreach the Dc-stable partition (if it exists) at no extra complexity.Hence, reaching an optimal and stable partition (when such apartition exists) does not incur extra complexity. For a givennetwork structure, during one merge process, each coalitionattempts to merge with other coalitions in its vicinity in apairwise manner. In the worst-case scenario, every SU, beforefinding a suitable merge partner, needs to make a merge attemptwith all the other SUs in N . In this case, the first SU requiresN − 1 attempts for merge (N being the number of SUs), thesecond requires N − 2 attempts, and so on. The total worst-casenumber of merge attempts will be
∑N−1i=1 i = (N(N − 1)/2).
In practice, the merge process requires a significantly lowernumber of attempts since finding a suitable partner does notalways require to go through all the merge attempts (once asuitable partner is identified the merge will immediately occur).This complexity is further reduced by the fact that a coalitiondoes not need to attempt to merge with far away or largecoalitions, where the false alarm cost is large relative to thebenefit or where the false alarm is larger than α (Theorem 1being an example of such merge regions for the two SUs case).Moreover, after the first run of the algorithm, the initial Nnoncooperative SUs will self-organize into larger coalitions.Subsequent runs of the algorithms will deal with a networkcomposed of a number of coalitions that are much smaller thanN , reducing the merge attempts per coalition. Finally, once agroup of coalitions merges into a larger coalition, the numberof merging possibilities for the remaining SUs will decrease asthe merge region becomes smaller (due to cooperation costs).
For the split rule, in the worst-case scenario, splitting caninvolve finding all the possible partitions of the set formed bythe SUs in a single coalition. For a given coalition, this number

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 289
is given by the Bell number, which exponentially grows withthe number of SUs in the coalition (here, the partition searchis restricted to each coalition and is not over the whole setN ) [23]. In practice, this split operation is restricted to theformed coalitions in the network, and thus, it will be appliedon small sets. Due to the cost function in (6) and (8), thesize of each coalition resulting from CSS CF is limited by theincreasing false alarm cost as well as by the SUs’ locations;thus, the coalitions formed in the proposed CSS game aresmall. As a result, the split complexity is limited to findingpossible partitions for small sets, which can be reasonable interms of complexity. The split complexity is further reducedby the fact that, in most scenarios, a coalition does not need tosearch for all possible split forms. For instance, once a coalitionidentifies a split structure verifying the Pareto order, the SUsin this coalition will split, and the search for further splitforms is not needed. In summary, the practical aspects dictatedby the cognitive network, such as the increasing false alarmcost, the errors on the reporting channel, the SUs’ locations, andthe sequential split search, will significantly diminish the splitcomplexity. In addition, the complexity of both merge and splitis also reduced due to the fact that the algorithm is distributed,and hence, all decisions are local to the coalitions.
In CF-PD, the adjust operation can be decided by eachcoalition internally similar to the merge-or-split operations, asexplained in Section VI. Further, for the CF-PD algorithm,typically, the merge-and-split operation will be less complexthan for the CF algorithm in Table I, since winning coalitionsdo not participate in the merge-and-split process. However,for CF-PD, another operation comes into place, which is theadjust operation. The adjust operation is local to each winningcoalition S in the network (adjust has no effect on losingcoalitions), and its complexity grows linearly in |S| (numberof SUs in S). Generally, the coalitions that form in the networkare small; thus, the adjust rule complexity is very small.
C. Coalition-Based Sensing
Once the coalitions form, the operation of the network withinevery coalition (Phase 3 in the CF and CF-PD algorithms) is,as briefly described in Sections II and IV-A, systematic. Firstand foremost, within every coalition, each SU prepares a singlesensing bit based on its local observation and then deliversthis bit to the coalition head through the wireless channel.Subsequently, the coalition head can perform the fusion ofthe bits and broadcast back the result, in a single bit, to allthe coalition members. In this paper, we adopt the commonOR-rule for decision fusion (hard decisions) that is widelyused in collaborative sensing in cognitive radio [7], [9], [10],[12]–[15].4 The operation of the network in this phase, i.e.,Phase 3, can be used to compare the communication overheadfor collaborative sensing between our proposed approach withthat of the traditional network-wide fusion center solution,such as [7], [9], [10], and [12]–[15]. The reason is that theactual collaborative sensing that takes place in Phase 3 with
4Note that, the proposed CF algorithm can be tailored to accommodate otherdecision fusion techniques.
the CF phase occurs only periodically (seldom in moderatelychanging environments). For example, in a static network, CFis performed only once, and subsequently, the SUs can performcollaborative sensing at the level of their coalitions. In thisregard, in the network-wide fusion center, every single SU inthe network needs to report its sensing bit to the fusion center,which yields up to N bits per report, where N is the totalnumber of SUs. When the network is large and the SUs arespread out far way from the fusion center, this communicationoverhead is quite significant. In contrast, in Phase 3 of theproposed algorithm, to perform coalition-based collaborativesensing, the SUs belonging to the same coalition would needto only do a local exchange of the sensing bits at the levelof coalition, which would have a size much smaller than N .For instance, as demonstrated in Theorem 2, due to the falsealarm constraint, the size of the coalitions resulting from theproposed algorithm is upper bounded. In fact, as will be seenthrough simulations in Section VII, the size of the resultingcoalitions will, in general, be much smaller than N . Thus,clearly, the bandwidth required for communications of thesensing bits in Phase 3 of our algorithm is quite low, as onlysingle bits are exchanged between coalition members. In fact,within each coalition, the overhead communication required toperform collaborative sensing will be much smaller than N .Beyond the overhead communication advantage, performingcollaborative sensing at the level of coalitions would savepower and energy for the SUs since, in general, they wouldreport their bits to a neighboring coalition head. Moreover,the proposed approach would make reporting the sensing bitsmore reliable since, in each individual formed coalition, theprobability of error over the reporting channel, as per (5), wouldbe much smaller than in the case where all N SUs need tosubmit their bits to a fusion center. In a nutshell, performingcollaborative sensing at the level of coalitions not only reducesthe overhead communication but also improves reliability andreduces the power consumption (used for sensing) of the SUs.For multiple access within each coalition (during sensing bitexchange), well-known existing MAC protocols can readilybe used, such as simple orthogonal channels [7], [9], [10],[12]–[15], random access techniques [41], or low-temperaturehandshake solutions, such as in [45]. To adapt to environmentalchanges such as mobility, the SUs perform the first two phasesof the proposed CF algorithm in Table I periodically over time(see Section IV-A).
D. Impact of Potential Estimation Errors
In this paper, as mentioned in Section II, all the SUs areconsidered as honest nodes that exhibit no malicious or cheatingbehavior. Hence, only estimation errors (e.g., due to a low re-ceived SNR from the PU) may have some impact on the formedcoalitions if, once a coalition forms, the probability of miss ofan SU is not as good as envisioned during the CF process. Here,all the cooperation decisions are based on the probability ofmiss that is averaged over the fading realizations, as per (1). Inthis context, the probability of miss in (1) already captures thepossibility of having a low SNR received from the PU, which,in turn, maps into an estimation error. Therefore, the SUs thatare more apt to making estimation errors, i.e., SUs far away
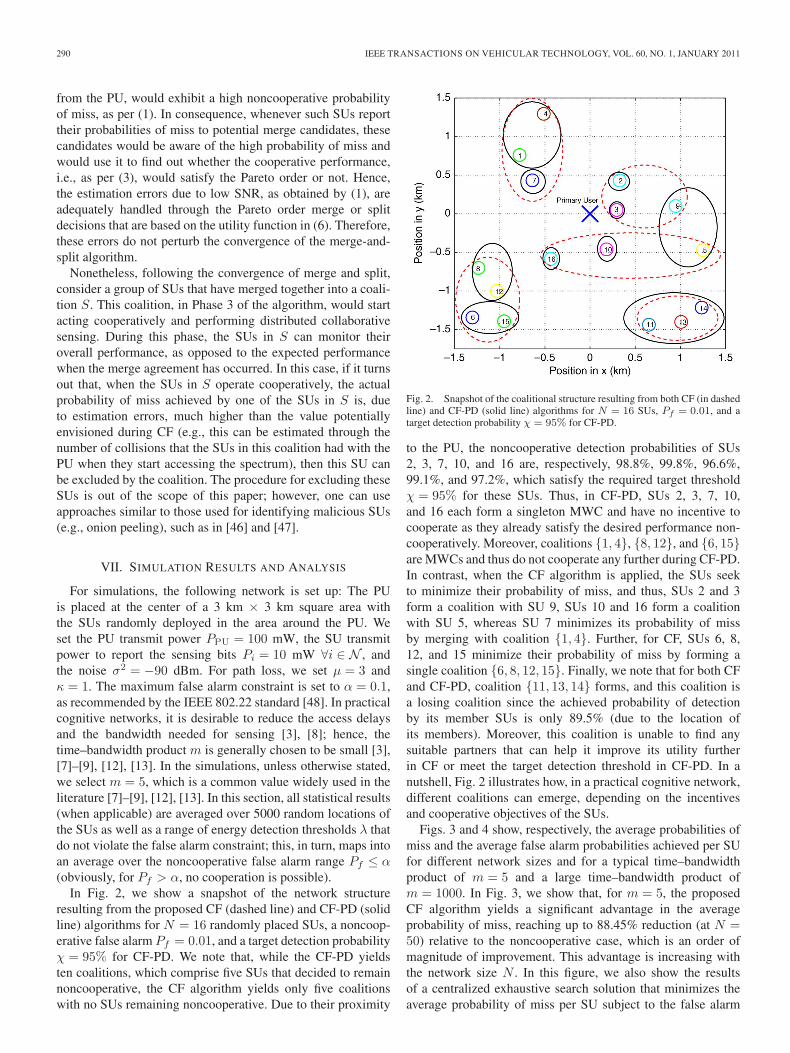
290 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
from the PU, would exhibit a high noncooperative probabilityof miss, as per (1). In consequence, whenever such SUs reporttheir probabilities of miss to potential merge candidates, thesecandidates would be aware of the high probability of miss andwould use it to find out whether the cooperative performance,i.e., as per (3), would satisfy the Pareto order or not. Hence,the estimation errors due to low SNR, as obtained by (1), areadequately handled through the Pareto order merge or splitdecisions that are based on the utility function in (6). Therefore,these errors do not perturb the convergence of the merge-and-split algorithm.
Nonetheless, following the convergence of merge and split,consider a group of SUs that have merged together into a coali-tion S. This coalition, in Phase 3 of the algorithm, would startacting cooperatively and performing distributed collaborativesensing. During this phase, the SUs in S can monitor theiroverall performance, as opposed to the expected performancewhen the merge agreement has occurred. In this case, if it turnsout that, when the SUs in S operate cooperatively, the actualprobability of miss achieved by one of the SUs in S is, dueto estimation errors, much higher than the value potentiallyenvisioned during CF (e.g., this can be estimated through thenumber of collisions that the SUs in this coalition had with thePU when they start accessing the spectrum), then this SU canbe excluded by the coalition. The procedure for excluding theseSUs is out of the scope of this paper; however, one can useapproaches similar to those used for identifying malicious SUs(e.g., onion peeling), such as in [46] and [47].
VII. SIMULATION RESULTS AND ANALYSIS
For simulations, the following network is set up: The PUis placed at the center of a 3 km × 3 km square area withthe SUs randomly deployed in the area around the PU. Weset the PU transmit power PPU = 100 mW, the SU transmitpower to report the sensing bits Pi = 10 mW ∀i ∈ N , andthe noise σ2 = −90 dBm. For path loss, we set μ = 3 andκ = 1. The maximum false alarm constraint is set to α = 0.1,as recommended by the IEEE 802.22 standard [48]. In practicalcognitive networks, it is desirable to reduce the access delaysand the bandwidth needed for sensing [3], [8]; hence, thetime–bandwidth product m is generally chosen to be small [3],[7]–[9], [12], [13]. In the simulations, unless otherwise stated,we select m = 5, which is a common value widely used in theliterature [7]–[9], [12], [13]. In this section, all statistical results(when applicable) are averaged over 5000 random locations ofthe SUs as well as a range of energy detection thresholds λ thatdo not violate the false alarm constraint; this, in turn, maps intoan average over the noncooperative false alarm range Pf ≤ α(obviously, for Pf > α, no cooperation is possible).
In Fig. 2, we show a snapshot of the network structureresulting from the proposed CF (dashed line) and CF-PD (solidline) algorithms for N = 16 randomly placed SUs, a noncoop-erative false alarm Pf = 0.01, and a target detection probabilityχ = 95% for CF-PD. We note that, while the CF-PD yieldsten coalitions, which comprise five SUs that decided to remainnoncooperative, the CF algorithm yields only five coalitionswith no SUs remaining noncooperative. Due to their proximity
Fig. 2. Snapshot of the coalitional structure resulting from both CF (in dashedline) and CF-PD (solid line) algorithms for N = 16 SUs, Pf = 0.01, and atarget detection probability χ = 95% for CF-PD.
to the PU, the noncooperative detection probabilities of SUs2, 3, 7, 10, and 16 are, respectively, 98.8%, 99.8%, 96.6%,99.1%, and 97.2%, which satisfy the required target thresholdχ = 95% for these SUs. Thus, in CF-PD, SUs 2, 3, 7, 10,and 16 each form a singleton MWC and have no incentive tocooperate as they already satisfy the desired performance non-cooperatively. Moreover, coalitions {1, 4}, {8, 12}, and {6, 15}are MWCs and thus do not cooperate any further during CF-PD.In contrast, when the CF algorithm is applied, the SUs seekto minimize their probability of miss, and thus, SUs 2 and 3form a coalition with SU 9, SUs 10 and 16 form a coalitionwith SU 5, whereas SU 7 minimizes its probability of missby merging with coalition {1, 4}. Further, for CF, SUs 6, 8,12, and 15 minimize their probability of miss by forming asingle coalition {6, 8, 12, 15}. Finally, we note that for both CFand CF-PD, coalition {11, 13, 14} forms, and this coalition isa losing coalition since the achieved probability of detectionby its member SUs is only 89.5% (due to the location ofits members). Moreover, this coalition is unable to find anysuitable partners that can help it improve its utility furtherin CF or meet the target detection threshold in CF-PD. In anutshell, Fig. 2 illustrates how, in a practical cognitive network,different coalitions can emerge, depending on the incentivesand cooperative objectives of the SUs.
Figs. 3 and 4 show, respectively, the average probabilities ofmiss and the average false alarm probabilities achieved per SUfor different network sizes and for a typical time–bandwidthproduct of m = 5 and a large time–bandwidth product ofm = 1000. In Fig. 3, we show that, for m = 5, the proposedCF algorithm yields a significant advantage in the averageprobability of miss, reaching up to 88.45% reduction (at N =50) relative to the noncooperative case, which is an order ofmagnitude of improvement. This advantage is increasing withthe network size N . In this figure, we also show the resultsof a centralized exhaustive search solution that minimizes theaverage probability of miss per SU subject to the false alarm
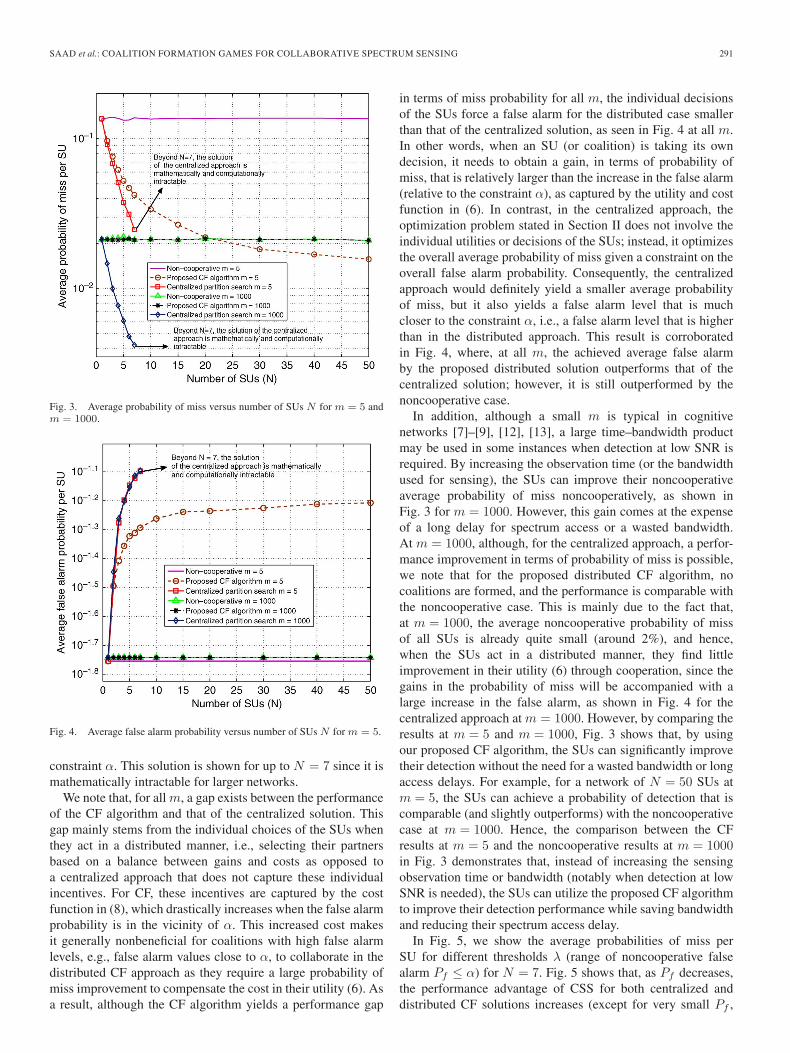
SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 291
Fig. 3. Average probability of miss versus number of SUs N for m = 5 andm = 1000.
Fig. 4. Average false alarm probability versus number of SUs N for m = 5.
constraint α. This solution is shown for up to N = 7 since it ismathematically intractable for larger networks.
We note that, for all m, a gap exists between the performanceof the CF algorithm and that of the centralized solution. Thisgap mainly stems from the individual choices of the SUs whenthey act in a distributed manner, i.e., selecting their partnersbased on a balance between gains and costs as opposed toa centralized approach that does not capture these individualincentives. For CF, these incentives are captured by the costfunction in (8), which drastically increases when the false alarmprobability is in the vicinity of α. This increased cost makesit generally nonbeneficial for coalitions with high false alarmlevels, e.g., false alarm values close to α, to collaborate in thedistributed CF approach as they require a large probability ofmiss improvement to compensate the cost in their utility (6). Asa result, although the CF algorithm yields a performance gap
in terms of miss probability for all m, the individual decisionsof the SUs force a false alarm for the distributed case smallerthan that of the centralized solution, as seen in Fig. 4 at all m.In other words, when an SU (or coalition) is taking its owndecision, it needs to obtain a gain, in terms of probability ofmiss, that is relatively larger than the increase in the false alarm(relative to the constraint α), as captured by the utility and costfunction in (6). In contrast, in the centralized approach, theoptimization problem stated in Section II does not involve theindividual utilities or decisions of the SUs; instead, it optimizesthe overall average probability of miss given a constraint on theoverall false alarm probability. Consequently, the centralizedapproach would definitely yield a smaller average probabilityof miss, but it also yields a false alarm level that is muchcloser to the constraint α, i.e., a false alarm level that is higherthan in the distributed approach. This result is corroboratedin Fig. 4, where, at all m, the achieved average false alarmby the proposed distributed solution outperforms that of thecentralized solution; however, it is still outperformed by thenoncooperative case.
In addition, although a small m is typical in cognitivenetworks [7]–[9], [12], [13], a large time–bandwidth productmay be used in some instances when detection at low SNR isrequired. By increasing the observation time (or the bandwidthused for sensing), the SUs can improve their noncooperativeaverage probability of miss noncooperatively, as shown inFig. 3 for m = 1000. However, this gain comes at the expenseof a long delay for spectrum access or a wasted bandwidth.At m = 1000, although, for the centralized approach, a perfor-mance improvement in terms of probability of miss is possible,we note that for the proposed distributed CF algorithm, nocoalitions are formed, and the performance is comparable withthe noncooperative case. This is mainly due to the fact that,at m = 1000, the average noncooperative probability of missof all SUs is already quite small (around 2%), and hence,when the SUs act in a distributed manner, they find littleimprovement in their utility (6) through cooperation, since thegains in the probability of miss will be accompanied with alarge increase in the false alarm, as shown in Fig. 4 for thecentralized approach at m = 1000. However, by comparing theresults at m = 5 and m = 1000, Fig. 3 shows that, by usingour proposed CF algorithm, the SUs can significantly improvetheir detection without the need for a wasted bandwidth or longaccess delays. For example, for a network of N = 50 SUs atm = 5, the SUs can achieve a probability of detection that iscomparable (and slightly outperforms) with the noncooperativecase at m = 1000. Hence, the comparison between the CFresults at m = 5 and the noncooperative results at m = 1000in Fig. 3 demonstrates that, instead of increasing the sensingobservation time or bandwidth (notably when detection at lowSNR is needed), the SUs can utilize the proposed CF algorithmto improve their detection performance while saving bandwidthand reducing their spectrum access delay.
In Fig. 5, we show the average probabilities of miss perSU for different thresholds λ (range of noncooperative falsealarm Pf ≤ α) for N = 7. Fig. 5 shows that, as Pf decreases,the performance advantage of CSS for both centralized anddistributed CF solutions increases (except for very small Pf ,
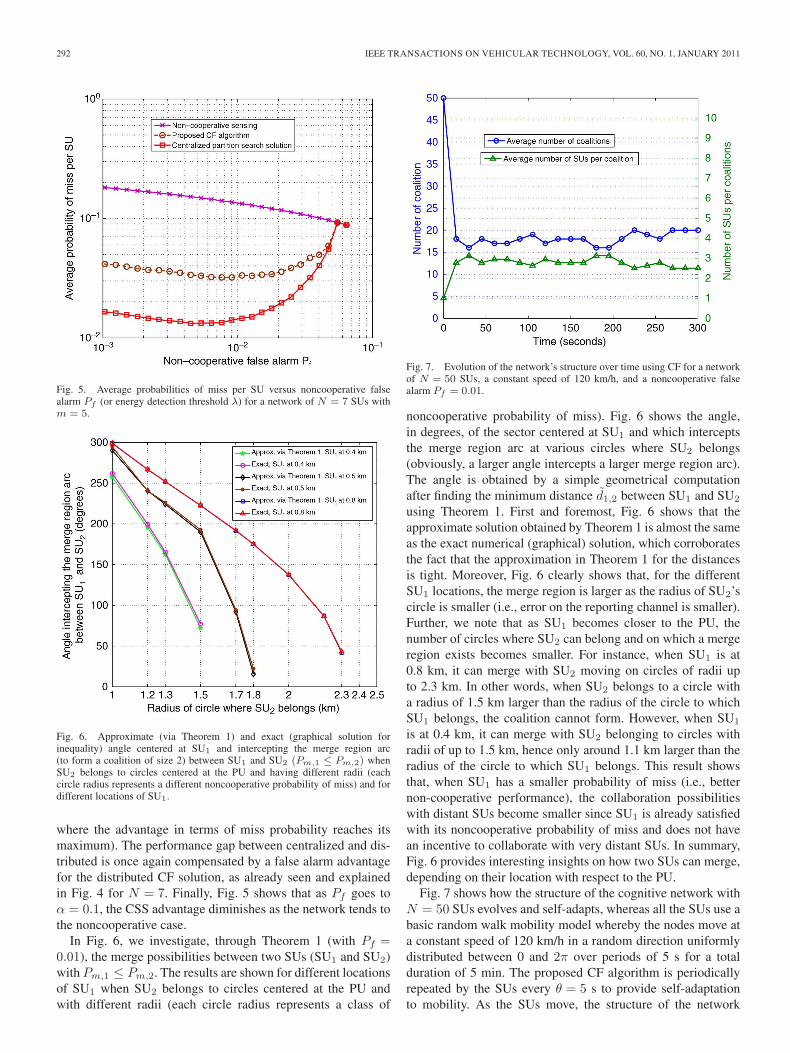
292 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
Fig. 5. Average probabilities of miss per SU versus noncooperative falsealarm Pf (or energy detection threshold λ) for a network of N = 7 SUs withm = 5.
Fig. 6. Approximate (via Theorem 1) and exact (graphical solution forinequality) angle centered at SU1 and intercepting the merge region arc(to form a coalition of size 2) between SU1 and SU2 (Pm,1 ≤ Pm,2) whenSU2 belongs to circles centered at the PU and having different radii (eachcircle radius represents a different noncooperative probability of miss) and fordifferent locations of SU1.
where the advantage in terms of miss probability reaches itsmaximum). The performance gap between centralized and dis-tributed is once again compensated by a false alarm advantagefor the distributed CF solution, as already seen and explainedin Fig. 4 for N = 7. Finally, Fig. 5 shows that as Pf goes toα = 0.1, the CSS advantage diminishes as the network tends tothe noncooperative case.
In Fig. 6, we investigate, through Theorem 1 (with Pf =0.01), the merge possibilities between two SUs (SU1 and SU2)with Pm,1 ≤ Pm,2. The results are shown for different locationsof SU1 when SU2 belongs to circles centered at the PU andwith different radii (each circle radius represents a class of
Fig. 7. Evolution of the network’s structure over time using CF for a networkof N = 50 SUs, a constant speed of 120 km/h, and a noncooperative falsealarm Pf = 0.01.
noncooperative probability of miss). Fig. 6 shows the angle,in degrees, of the sector centered at SU1 and which interceptsthe merge region arc at various circles where SU2 belongs(obviously, a larger angle intercepts a larger merge region arc).The angle is obtained by a simple geometrical computationafter finding the minimum distance d1,2 between SU1 and SU2
using Theorem 1. First and foremost, Fig. 6 shows that theapproximate solution obtained by Theorem 1 is almost the sameas the exact numerical (graphical) solution, which corroboratesthe fact that the approximation in Theorem 1 for the distancesis tight. Moreover, Fig. 6 clearly shows that, for the differentSU1 locations, the merge region is larger as the radius of SU2’scircle is smaller (i.e., error on the reporting channel is smaller).Further, we note that as SU1 becomes closer to the PU, thenumber of circles where SU2 can belong and on which a mergeregion exists becomes smaller. For instance, when SU1 is at0.8 km, it can merge with SU2 moving on circles of radii upto 2.3 km. In other words, when SU2 belongs to a circle witha radius of 1.5 km larger than the radius of the circle to whichSU1 belongs, the coalition cannot form. However, when SU1
is at 0.4 km, it can merge with SU2 belonging to circles withradii of up to 1.5 km, hence only around 1.1 km larger than theradius of the circle to which SU1 belongs. This result showsthat, when SU1 has a smaller probability of miss (i.e., betternon-cooperative performance), the collaboration possibilitieswith distant SUs become smaller since SU1 is already satisfiedwith its noncooperative probability of miss and does not havean incentive to collaborate with very distant SUs. In summary,Fig. 6 provides interesting insights on how two SUs can merge,depending on their location with respect to the PU.
Fig. 7 shows how the structure of the cognitive network withN = 50 SUs evolves and self-adapts, whereas all the SUs use abasic random walk mobility model whereby the nodes move ata constant speed of 120 km/h in a random direction uniformlydistributed between 0 and 2π over periods of 5 s for a totalduration of 5 min. The proposed CF algorithm is periodicallyrepeated by the SUs every θ = 5 s to provide self-adaptationto mobility. As the SUs move, the structure of the network

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 293
Fig. 8. Average percentage of winning SUs achieving χ = 95% detectionprobability versus number of SUs N .
changes, with new coalitions forming and others splitting. Thenetwork starts with a noncooperative structure made up of50 independent SUs. In the first step, the network self-organizesin 18 coalitions with an average of 2.77 SUs per coalition.As time evolves, the SUs self-organize the structure, which ischanging as new coalitions form or others split. After 5 minhave elapsed, the final structure is made up of 20 coalitions withan average of 2.5 SUs per coalition.
In Fig. 8, we evaluate the performance of the CF-PD algo-rithm in Table II by showing the average percentage of win-ning SUs (average over locations of SUs and noncooperativefalse alarm range Pf ≤ α), i.e., SUs achieving a detectionprobability χ = 95% imposed by the PU (the choice of χ =95% conforms with the recommendation of the IEEE 802.22standard [48]) as a function of the network size N . We comparethe performance of CF-PD with that of the noncooperative caseas well as the optimal partition that maximizes the number ofwinning SUs and that is found by a centralized search overall partitions formed of MWCs. For CF-PD, the percentageof winning SUs increases with the number of SUs since thepossibility of finding cooperating partners increases. In con-trast, the noncooperative approach presents an almost constantperformance with different network sizes. Cooperation presentsa significant advantage over the noncooperative case in termsof the average percentage of winning SUs, and this advantageincreases with the network size, approximately tripling thenumber of winning SUs (relative to the noncooperative case)at N = 50. Furthermore, compared with the optimal solution,the proposed CF-PD algorithm achieves a highly comparableperformance with a loss not exceeding 3.7 percentage pointsat N = 7. This shows that, by using the proposed CF-PDalgorithm, the network can achieve a performance that is closeto optimal. Note that, for networks larger than N = 7 SUs,finding the optimal partition through exhaustive search is math-ematically and computationally intractable. However, as thenetwork size increases, CF-PD presents a portion of winningSUs that is close to 100%, reaching up to 87.25% at N = 50;hence, as the network grows, the performance gap relative to the
Fig. 9. Average percentage of winning SUs versus the desired probability ofmiss γ = 1 − χ for the proposed CF-PD algorithm for N = 50 SUs.
optimal case will not increase much. Finally, in Fig. 8, we notethat for the proposed algorithm, the noncooperative case, andthe optimal solution, some SUs (or coalitions) are still losing,i.e., unable to meet the χ = 95% constraint. This is mainly dueto the current locations and channels of these SUs. For theseSUs to meet the desired performance level, they need to waitfor environmental changes, such as their own mobility (movingto a better location) or the arrival of new SUs that can boosttheir performance.
In Fig. 9, we show the average percentage of winning SUs(average over locations of SUs and noncooperative false alarmrange Pf ≤ α) achieved by CF-PD for N = 50 SUs as thedesired probability of miss γ = 1 − χ increases (i.e., desireddetection probability decreases) within the range recommendedby the IEEE 802.22 [48]. As γ increases, the number of winningSUs increases for both the CF-PD and the noncooperative case,as it becomes easier to guarantee this required probability.Fig. 9 shows that the proposed CF-PD algorithm guaranteesthat at least 74.1% of the SUs (at γ = 0.01, the most stringentconstraint) achieve the desired detection probability. Further,at all γ, CF-PD presents a significant advantage over thenoncooperative case, which increases as the desired detectionprobability becomes stricter. For instance, at γ = 0.01 (i.e., χ =99%), CF-PD allows around eight times more SUs (relative tothe non-cooperative case) to achieve the required probability ofdetection. In Fig. 10, for a network of N = 50 SUs, we evaluatethe sizes of the coalitions resulting from CF and CF-PD (withχ = 95%) and compare them with the upper bound Mmax
derived in Theorem 2. First, as the noncooperative Pf increases,for CF and CF-PD, both the maximum and the average size ofthe formed coalitions decrease, converging toward the noncoop-erative case as Pf reaches the constraint α = 0.1. Through thisresult, we can clearly see the limitations that the detection falsealarm probabilities tradeoff for CSS imposes on the coalitionsize and network structure. In addition, in Fig. 10, we show that,although the upper bound on coalition size Mmax drastically in-creases as Pf becomes smaller, the average maximum coalition
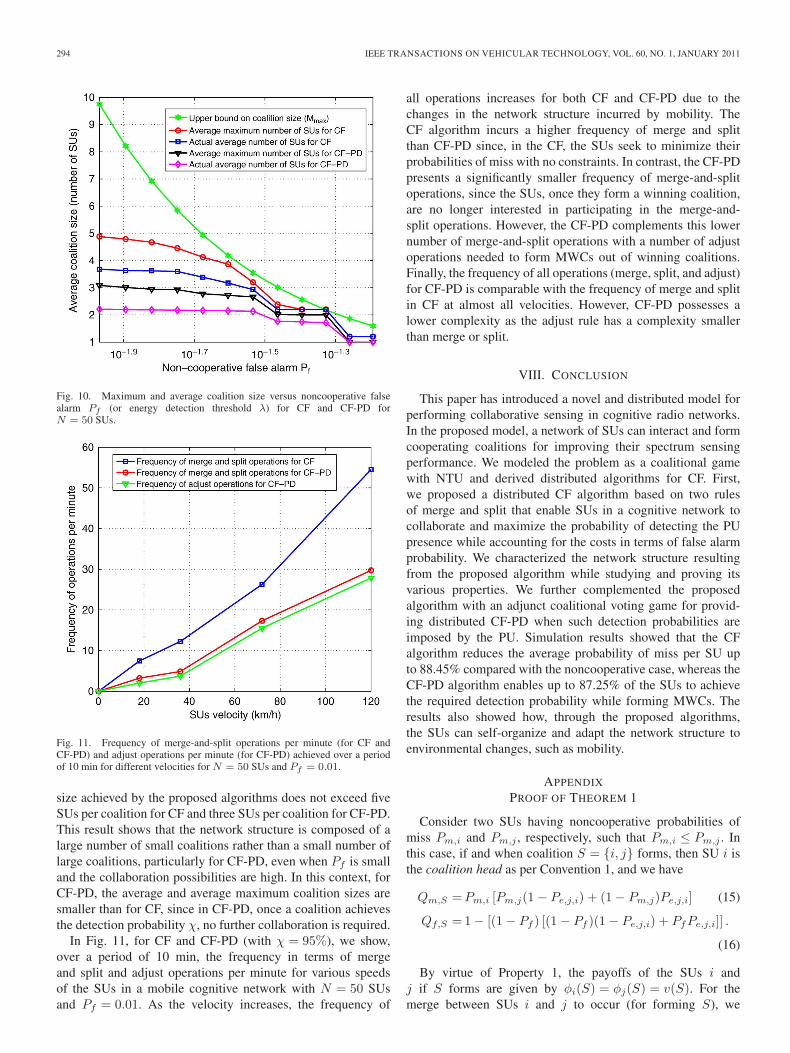
294 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
Fig. 10. Maximum and average coalition size versus noncooperative falsealarm Pf (or energy detection threshold λ) for CF and CF-PD forN = 50 SUs.
Fig. 11. Frequency of merge-and-split operations per minute (for CF andCF-PD) and adjust operations per minute (for CF-PD) achieved over a periodof 10 min for different velocities for N = 50 SUs and Pf = 0.01.
size achieved by the proposed algorithms does not exceed fiveSUs per coalition for CF and three SUs per coalition for CF-PD.This result shows that the network structure is composed of alarge number of small coalitions rather than a small number oflarge coalitions, particularly for CF-PD, even when Pf is smalland the collaboration possibilities are high. In this context, forCF-PD, the average and average maximum coalition sizes aresmaller than for CF, since in CF-PD, once a coalition achievesthe detection probability χ, no further collaboration is required.
In Fig. 11, for CF and CF-PD (with χ = 95%), we show,over a period of 10 min, the frequency in terms of mergeand split and adjust operations per minute for various speedsof the SUs in a mobile cognitive network with N = 50 SUsand Pf = 0.01. As the velocity increases, the frequency of
all operations increases for both CF and CF-PD due to thechanges in the network structure incurred by mobility. TheCF algorithm incurs a higher frequency of merge and splitthan CF-PD since, in the CF, the SUs seek to minimize theirprobabilities of miss with no constraints. In contrast, the CF-PDpresents a significantly smaller frequency of merge-and-splitoperations, since the SUs, once they form a winning coalition,are no longer interested in participating in the merge-and-split operations. However, the CF-PD complements this lowernumber of merge-and-split operations with a number of adjustoperations needed to form MWCs out of winning coalitions.Finally, the frequency of all operations (merge, split, and adjust)for CF-PD is comparable with the frequency of merge and splitin CF at almost all velocities. However, CF-PD possesses alower complexity as the adjust rule has a complexity smallerthan merge or split.
VIII. CONCLUSION
This paper has introduced a novel and distributed model forperforming collaborative sensing in cognitive radio networks.In the proposed model, a network of SUs can interact and formcooperating coalitions for improving their spectrum sensingperformance. We modeled the problem as a coalitional gamewith NTU and derived distributed algorithms for CF. First,we proposed a distributed CF algorithm based on two rulesof merge and split that enable SUs in a cognitive network tocollaborate and maximize the probability of detecting the PUpresence while accounting for the costs in terms of false alarmprobability. We characterized the network structure resultingfrom the proposed algorithm while studying and proving itsvarious properties. We further complemented the proposedalgorithm with an adjunct coalitional voting game for provid-ing distributed CF-PD when such detection probabilities areimposed by the PU. Simulation results showed that the CFalgorithm reduces the average probability of miss per SU upto 88.45% compared with the noncooperative case, whereas theCF-PD algorithm enables up to 87.25% of the SUs to achievethe required detection probability while forming MWCs. Theresults also showed how, through the proposed algorithms,the SUs can self-organize and adapt the network structure toenvironmental changes, such as mobility.
APPENDIX
PROOF OF THEOREM 1
Consider two SUs having noncooperative probabilities ofmiss Pm,i and Pm,j , respectively, such that Pm,i ≤ Pm,j . Inthis case, if and when coalition S = {i, j} forms, then SU i isthe coalition head as per Convention 1, and we have
Qm,S = Pm,i [Pm,j(1 − Pe,j,i) + (1 − Pm,j)Pe,j,i] (15)
Qf,S = 1 − [(1 − Pf ) [(1 − Pf )(1 − Pe,j,i) + PfPe,j,i]] .
(16)
By virtue of Property 1, the payoffs of the SUs i andj if S forms are given by φi(S) = φj(S) = v(S). For themerge between SUs i and j to occur (for forming S), we

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 295
must have S � {{i}, {j}}. Using the Pareto order, and giventhat v({i}) ≥ v({j}), S � {{i}, {j}} translates into φi(S) =v(S) > v({i}) ≥ v({j}). After algebraic manipulations andusing the expressions of v({i}) and v(S) in (6), we obtain
D · Pe,j,i + C
α2≤ log
(1 −
(A · Pe,j,i + B
α
)2)
(17)
where Pe,j,i is the probability of error between the two SUs,A = (2Pf − 1)(Pf − 1), B = Pf (2 − Pf ), C = Pm,i(Pm,j −1) + (α2 · log(1 − (Pf/α)2)), and D = Pm,i(1 − 2Pm,j).
The inequality in (17) is a transcendental inequality thatonly admits a numerical (graphical) solution, with no analyticalexpression [49]. The numerical solution (by solution we implythe range of Pe,j,i that satisfies the inequality) can be derivedby plotting both sides of the equation as a function of Pe,j,i.A sufficient approximate solution (i.e., approximate range ofPe,j,i that satisfy the inequality) for (17) is found by solving
D · Pe,j,i + C
α2≤ log
(1 −
(A · Pe,j,i + B
α
)2)
(18)
where Pe,j,i is the value that maximizes (D · Pe,j,i + C)/α2
(since the probability of error is bounded, this maximum isfinite) and that directly depends on the sign of D. By algebraicmanipulation, (18) yields the following quadratic inequality inPe,j,i:
A2P 2e,j,i + (2AB)Pe,j,i + B2 + α2
(e
(C+Pe,j,iD
α2
)− 1
)≤ 0
(19)
with discriminant Δ = A2α2(1 − e((C+Pe,j,iD)/α2)). We dis-tinguish two cases, depending on the sign of D = Pm,i(1 −2Pm,j).
Case 1: D ≥ 0, that is, Pm,j ≤ (1/2). First, we note that1) Pf , which solely depends on the detection threshold λ, isgenerally chosen relatively small compared with 1 (a typicalvalue is 0.01), and 2) the inequality (17) admits a solutionif and only if A · Pe,j,i + B < α (otherwise, the right-handside (RHS) of (17) goes to −∞). A direct result of 2) isthat any solution Pe,j,i for (17) cannot exceed (α − B)/A. Byusing 1), we have that A ≈ 1 and B ≈ 0; hence, any solutionPe,j,i can be approximately bounded by Pe,j,i ≤ α, and thus,the probability of error Pe,j,i = α. In this case, Δ is alwayspositive. After manipulation, (1 − e((C+αD/α2))) > 0 yields
Pm,i(1 − Pm,j) + Pm,i(2Pm,j − 1) > α2 log
(1 −
P 2f
α2
).
(20)
The RHS is always negative (barrier function [27]). Theleft-hand side can be shown to be always positive sinceotherwise, we need Pm,i(1 − Pm,j) + αPm,i(2Pm,j − 1) < 0,which yields two cases Pmj
> (α − 1/2α − 1) ≥ 1 if α <0.5 or Pmj
< (α − 1/2α − 1) ≤ 0 if α > 0.5, which are both
impossible for 0 ≤ Pm,j ≤ 1 (probability of miss). Hence,when Pm,j ≤ (1/2), (18) admits the following two roots:
Pe,j,i =
(−B + α
√(1 − e(
C+αD
α2 )))
A,
P ′e,j,i =
(−B − α
√(1 − e(
C+αD
α2 )))
A. (21)
Otherwise, P ′e,j,i < 0 [A > 0 due to (i)]. Consequently, the
solution of (19) is Pe,j,i ≤ Pe,j,i, where Pe,j,i is given by (afteralgebraic manipulation and substituting A, B, C, and D fortheir values)
Pe,j,i =
Pf (Pf −2)+α
√(1−
(1− P 2
f
α2
)e
Pm,i(1−α)(Pm,j−1)
α2
)(2Pf − 1)(Pf −1)
.
(22)
The solution Pe,j,i ≤ Pe,j,i with Pe,j,i in (22) provides asufficient analytical approximation for the solution (range ofprobabilities) of the initial transcendental inequality in (17)when Pm,j ≤ (1/2).
Case 2: D < 0, that is, Pm,j > (1/2). In this case, wecan easily see that Pe,1,2 = 0, and it is easily seen that thediscriminant Δ is positive. By following a reasoning analogousto Case 1, we find that the sufficient analytical approximationis Pe,j,i ≤ Pe,j,i with Pe,j,i given by
Pe,j,i =
Pf (Pf − 2) + α
√(1 −
(1 − P 2
f
α2
)e
Pm,i(Pm,j−1)
α2
)(2Pf − 1)(Pf − 1)
.
(23)
We can combine these two cases into one solution, that is,Pe,j,i ≤ Pe,j,i with
Pe,j,i =
Pf (Pf −2)+α
√(1−
(1− P 2
f
α2
)e
Pm,i(1−η)(Pm,j−1)
α2
)(2Pf −1)(Pf −1)
(24)with η = α if Pm,j ≤ (1/2) and η = 0 otherwise.
REFERENCES
[1] “Spectrum policy task force report,” Fed. Commun. Comm.,Washington, DC, Rep. ET Docket no. 02-135, Nov. 2002.
[2] S. Haykin, “Cognitive radio: Brain-empowered wireless communica-tions,” IEEE J. Sel. Areas Commun., vol. 23, no. 2, pp. 201–220,Feb. 2005.
[3] D. Niyato, E. Hossain, and Z. Han, Dynamic Spectrum Access in Cogni-tive Radio Networks. Cambridge, U.K.: Cambridge Univ. Press, 2009.
[4] M. Dohler, S. Ghorashi, M. Ghozzi, M. Arndt, F. Said, andA. Aghvami, “Opportunistic scheduling using cognitive radio,” ElsevierSci. J.—Special Issue on Cognitive Radio, vol. 7, pp. 805–815, Sep. 2006.
[5] D. Niyato and E. Hossain, “Cognitive radio for next generation wirelessnetworks: An approach to opportunistic channel selection in IEEE 802.11-based wireless mesh,” IEEE Trans. Wireless Commun., vol. 16, no. 1,pp. 46–54, Feb. 2009.
[6] D. Cabric, M. S. Mishra, and R. W. Brodersen, “Implementation issues inspectrum sensing for cognitive radios,” in Proc. Asilomar Conf. Signals,Syst., Comput., Pacific Grove, CA, Nov. 2004, pp. 772–776.
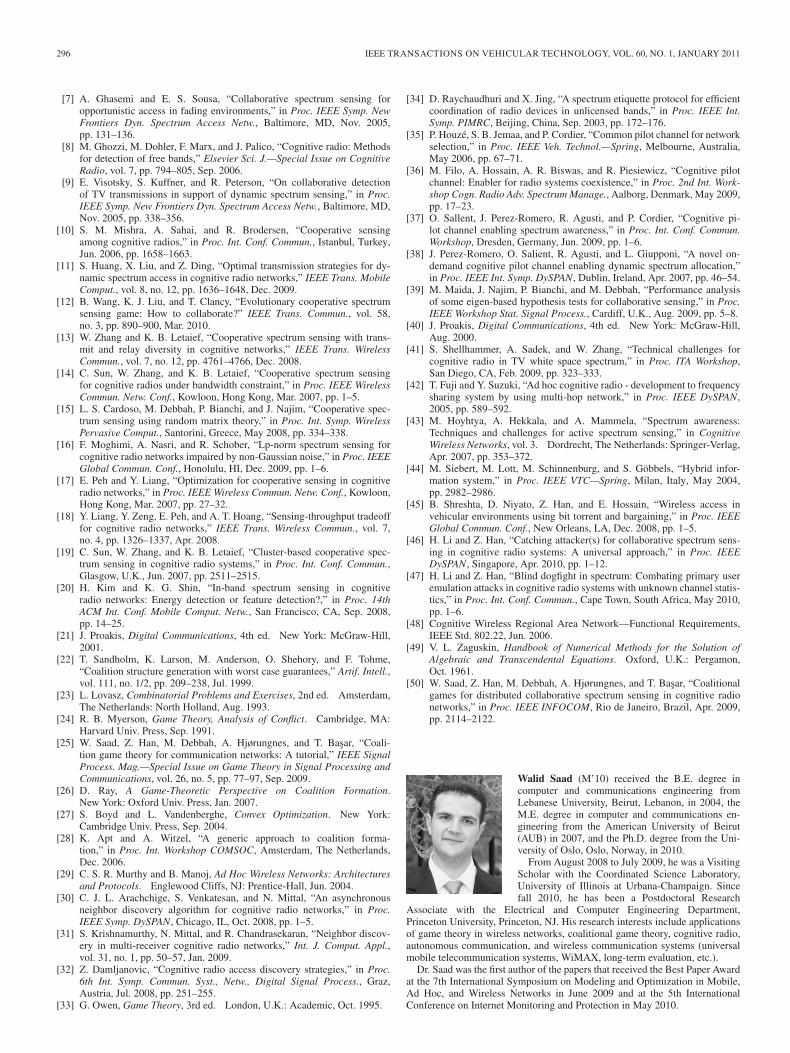
296 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 60, NO. 1, JANUARY 2011
[7] A. Ghasemi and E. S. Sousa, “Collaborative spectrum sensing foropportunistic access in fading environments,” in Proc. IEEE Symp. NewFrontiers Dyn. Spectrum Access Netw., Baltimore, MD, Nov. 2005,pp. 131–136.
[8] M. Ghozzi, M. Dohler, F. Marx, and J. Palico, “Cognitive radio: Methodsfor detection of free bands,” Elsevier Sci. J.—Special Issue on CognitiveRadio, vol. 7, pp. 794–805, Sep. 2006.
[9] E. Visotsky, S. Kuffner, and R. Peterson, “On collaborative detectionof TV transmissions in support of dynamic spectrum sensing,” in Proc.IEEE Symp. New Frontiers Dyn. Spectrum Access Netw., Baltimore, MD,Nov. 2005, pp. 338–356.
[10] S. M. Mishra, A. Sahai, and R. Brodersen, “Cooperative sensingamong cognitive radios,” in Proc. Int. Conf. Commun., Istanbul, Turkey,Jun. 2006, pp. 1658–1663.
[11] S. Huang, X. Liu, and Z. Ding, “Optimal transmission strategies for dy-namic spectrum access in cognitive radio networks,” IEEE Trans. MobileComput., vol. 8, no. 12, pp. 1636–1648, Dec. 2009.
[12] B. Wang, K. J. Liu, and T. Clancy, “Evolutionary cooperative spectrumsensing game: How to collaborate?” IEEE Trans. Commun., vol. 58,no. 3, pp. 890–900, Mar. 2010.
[13] W. Zhang and K. B. Letaief, “Cooperative spectrum sensing with trans-mit and relay diversity in cognitive networks,” IEEE Trans. WirelessCommun., vol. 7, no. 12, pp. 4761–4766, Dec. 2008.
[14] C. Sun, W. Zhang, and K. B. Letaief, “Cooperative spectrum sensingfor cognitive radios under bandwidth constraint,” in Proc. IEEE WirelessCommun. Netw. Conf., Kowloon, Hong Kong, Mar. 2007, pp. 1–5.
[15] L. S. Cardoso, M. Debbah, P. Bianchi, and J. Najim, “Cooperative spec-trum sensing using random matrix theory,” in Proc. Int. Symp. WirelessPervasive Comput., Santorini, Greece, May 2008, pp. 334–338.
[16] F. Moghimi, A. Nasri, and R. Schober, “Lp-norm spectrum sensing forcognitive radio networks impaired by non-Gaussian noise,” in Proc. IEEEGlobal Commun. Conf., Honolulu, HI, Dec. 2009, pp. 1–6.
[17] E. Peh and Y. Liang, “Optimization for cooperative sensing in cognitiveradio networks,” in Proc. IEEE Wireless Commun. Netw. Conf., Kowloon,Hong Kong, Mar. 2007, pp. 27–32.
[18] Y. Liang, Y. Zeng, E. Peh, and A. T. Hoang, “Sensing-throughput tradeofffor cognitive radio networks,” IEEE Trans. Wireless Commun., vol. 7,no. 4, pp. 1326–1337, Apr. 2008.
[19] C. Sun, W. Zhang, and K. B. Letaief, “Cluster-based cooperative spec-trum sensing in cognitive radio systems,” in Proc. Int. Conf. Commun.,Glasgow, U.K., Jun. 2007, pp. 2511–2515.
[20] H. Kim and K. G. Shin, “In-band spectrum sensing in cognitiveradio networks: Energy detection or feature detection?,” in Proc. 14thACM Int. Conf. Mobile Comput. Netw., San Francisco, CA, Sep. 2008,pp. 14–25.
[21] J. Proakis, Digital Communications, 4th ed. New York: McGraw-Hill,2001.
[22] T. Sandholm, K. Larson, M. Anderson, O. Shehory, and F. Tohme,“Coalition structure generation with worst case guarantees,” Artif. Intell.,vol. 111, no. 1/2, pp. 209–238, Jul. 1999.
[23] L. Lovasz, Combinatorial Problems and Exercises, 2nd ed. Amsterdam,The Netherlands: North Holland, Aug. 1993.
[24] R. B. Myerson, Game Theory, Analysis of Conflict. Cambridge, MA:Harvard Univ. Press, Sep. 1991.
[25] W. Saad, Z. Han, M. Debbah, A. Hjørungnes, and T. Basar, “Coali-tion game theory for communication networks: A tutorial,” IEEE SignalProcess. Mag.—Special Issue on Game Theory in Signal Processing andCommunications, vol. 26, no. 5, pp. 77–97, Sep. 2009.
[26] D. Ray, A Game-Theoretic Perspective on Coalition Formation.New York: Oxford Univ. Press, Jan. 2007.
[27] S. Boyd and L. Vandenberghe, Convex Optimization. New York:Cambridge Univ. Press, Sep. 2004.
[28] K. Apt and A. Witzel, “A generic approach to coalition forma-tion,” in Proc. Int. Workshop COMSOC, Amsterdam, The Netherlands,Dec. 2006.
[29] C. S. R. Murthy and B. Manoj, Ad Hoc Wireless Networks: Architecturesand Protocols. Englewood Cliffs, NJ: Prentice-Hall, Jun. 2004.
[30] C. J. L. Arachchige, S. Venkatesan, and N. Mittal, “An asynchronousneighbor discovery algorithm for cognitive radio networks,” in Proc.IEEE Symp. DySPAN, Chicago, IL, Oct. 2008, pp. 1–5.
[31] S. Krishnamurthy, N. Mittal, and R. Chandrasekaran, “Neighbor discov-ery in multi-receiver cognitive radio networks,” Int. J. Comput. Appl.,vol. 31, no. 1, pp. 50–57, Jan. 2009.
[32] Z. Damljanovic, “Cognitive radio access discovery strategies,” in Proc.6th Int. Symp. Commun. Syst., Netw., Digital Signal Process., Graz,Austria, Jul. 2008, pp. 251–255.
[33] G. Owen, Game Theory, 3rd ed. London, U.K.: Academic, Oct. 1995.
[34] D. Raychaudhuri and X. Jing, “A spectrum etiquette protocol for efficientcoordination of radio devices in unlicensed bands,” in Proc. IEEE Int.Symp. PIMRC, Beijing, China, Sep. 2003, pp. 172–176.
[35] P. Houzé, S. B. Jemaa, and P. Cordier, “Common pilot channel for networkselection,” in Proc. IEEE Veh. Technol.—Spring, Melbourne, Australia,May 2006, pp. 67–71.
[36] M. Filo, A. Hossain, A. R. Biswas, and R. Piesiewicz, “Cognitive pilotchannel: Enabler for radio systems coexistence,” in Proc. 2nd Int. Work-shop Cogn. Radio Adv. Spectrum Manage., Aalborg, Denmark, May 2009,pp. 17–23.
[37] O. Sallent, J. Perez-Romero, R. Agusti, and P. Cordier, “Cognitive pi-lot channel enabling spectrum awareness,” in Proc. Int. Conf. Commun.Workshop, Dresden, Germany, Jun. 2009, pp. 1–6.
[38] J. Perez-Romero, O. Salient, R. Agusti, and L. Giupponi, “A novel on-demand cognitive pilot channel enabling dynamic spectrum allocation,”in Proc. IEEE Int. Symp. DySPAN, Dublin, Ireland, Apr. 2007, pp. 46–54.
[39] M. Maida, J. Najim, P. Bianchi, and M. Debbah, “Performance analysisof some eigen-based hypothesis tests for collaborative sensing,” in Proc.IEEE Workshop Stat. Signal Process., Cardiff, U.K., Aug. 2009, pp. 5–8.
[40] J. Proakis, Digital Communications, 4th ed. New York: McGraw-Hill,Aug. 2000.
[41] S. Shellhammer, A. Sadek, and W. Zhang, “Technical challenges forcognitive radio in TV white space spectrum,” in Proc. ITA Workshop,San Diego, CA, Feb. 2009, pp. 323–333.
[42] T. Fuji and Y. Suzuki, “Ad hoc cognitive radio - development to frequencysharing system by using multi-hop network,” in Proc. IEEE DySPAN,2005, pp. 589–592.
[43] M. Hoyhtya, A. Hekkala, and A. Mammela, “Spectrum awareness:Techniques and challenges for active spectrum sensing,” in CognitiveWireless Networks, vol. 3. Dordrecht, The Netherlands: Springer-Verlag,Apr. 2007, pp. 353–372.
[44] M. Siebert, M. Lott, M. Schinnenburg, and S. Göbbels, “Hybrid infor-mation system,” in Proc. IEEE VTC—Spring, Milan, Italy, May 2004,pp. 2982–2986.
[45] B. Shreshta, D. Niyato, Z. Han, and E. Hossain, “Wireless access invehicular environments using bit torrent and bargaining,” in Proc. IEEEGlobal Commun. Conf., New Orleans, LA, Dec. 2008, pp. 1–5.
[46] H. Li and Z. Han, “Catching attacker(s) for collaborative spectrum sens-ing in cognitive radio systems: A universal approach,” in Proc. IEEEDySPAN, Singapore, Apr. 2010, pp. 1–12.
[47] H. Li and Z. Han, “Blind dogfight in spectrum: Combating primary useremulation attacks in cognitive radio systems with unknown channel statis-tics,” in Proc. Int. Conf. Commun., Cape Town, South Africa, May 2010,pp. 1–6.
[48] Cognitive Wireless Regional Area Network—Functional Requirements,IEEE Std. 802.22, Jun. 2006.
[49] V. L. Zaguskin, Handbook of Numerical Methods for the Solution ofAlgebraic and Transcendental Equations. Oxford, U.K.: Pergamon,Oct. 1961.
[50] W. Saad, Z. Han, M. Debbah, A. Hjørungnes, and T. Basar, “Coalitionalgames for distributed collaborative spectrum sensing in cognitive radionetworks,” in Proc. IEEE INFOCOM, Rio de Janeiro, Brazil, Apr. 2009,pp. 2114–2122.
Walid Saad (M’10) received the B.E. degree incomputer and communications engineering fromLebanese University, Beirut, Lebanon, in 2004, theM.E. degree in computer and communications en-gineering from the American University of Beirut(AUB) in 2007, and the Ph.D. degree from the Uni-versity of Oslo, Oslo, Norway, in 2010.
From August 2008 to July 2009, he was a VisitingScholar with the Coordinated Science Laboratory,University of Illinois at Urbana-Champaign. Sincefall 2010, he has been a Postdoctoral Research
Associate with the Electrical and Computer Engineering Department,Princeton University, Princeton, NJ. His research interests include applicationsof game theory in wireless networks, coalitional game theory, cognitive radio,autonomous communication, and wireless communication systems (universalmobile telecommunication systems, WiMAX, long-term evaluation, etc.).
Dr. Saad was the first author of the papers that received the Best Paper Awardat the 7th International Symposium on Modeling and Optimization in Mobile,Ad Hoc, and Wireless Networks in June 2009 and at the 5th InternationalConference on Internet Monitoring and Protection in May 2010.

SAAD et al.: COALITION FORMATION GAMES FOR COLLABORATIVE SPECTRUM SENSING 297
Zhu Han (S’01–M’04–SM’09) received the B.S.degree in electronic engineering from Tsinghua Uni-versity, Beijing, China, in 1997 and the M.S. andPh.D. degrees in electrical engineering from the Uni-versity of Maryland, College Park, in 1999 and 2003,respectively.
From 2000 to 2002, he was an R&D Engineerwith JDSU, Germantown, MD. From 2003 to 2006,he was a Research Associate with the University ofMaryland. From 2006 to 2008, he was an AssistantProfessor with Boise State University, Boise, ID.
During June–August 2006, he was a Visiting Scholar with Princeton University,Princeton, NJ. During May–August 2007, he was a Visiting Professor withStanford University, Stanford, CA. During May–August 2008, he was a VisitingProfessor with the University of Oslo, Oslo, Norway, and Supelec, Paris,France. In July 2009, he was a Visiting Professor with the University ofIllinois, Urbana. In June 2010, he visited the University of Avignon, Avignon,France. He is currently an Assistant Professor with the Department of Electricaland Computer Engineering, University of Houston, Houston, TX. He was theGuest Editor for the Special Issue on Fairness of Radio Resource Manage-ment Techniques in Wireless Networks in the EURASIP Journal on WirelessCommunications and Networking and the Special Issue on Game Theory in theEURASIP Journal on Advances in Signal Processing. His research interests in-clude wireless resource allocation and management, wireless communicationsand networking, game theory, wireless multimedia, and security.
Dr. Han has been an Associate Editor for the IEEE TRANSACTIONS ON
WIRELESS COMMUNICATIONS since 2010. He was the MAC Symposium ViceChair of the 2008 IEEE Wireless Communications and Networking Confer-ence. He was a Guest Editor for the Special Issue on Cooperative NetworkingChallenges and Applications for the IEEE JOURNAL ON SELECTED AREAS
IN COMMUNICATIONS. He was the recipient of the 2010 National ScienceFoundation CAREER Award and a corecipient of the Best Paper Awards atthe 2009 IEEE International Conference on Communications and the SeventhInternational Symposium on Modeling and Optimization in Mobile, Ad Hoc,and Wireless Networks in 2009.
Tamer Basar (S’71–M’73–SM’79–F’83) receivedthe B.S.E.E. degree from Robert College, Istanbul,Turkey, and the M.S., M.Phil., and Ph.D. degreesfrom Yale University, New Haven, CT.
He joined the University of Illinois at Urbana-Champaign (UIUC) in 1981 after holding posi-tions at Harvard University, Cambridge, MA, andMarmara Research Institute, Gebze, Turkey. He iscurrently with UIUC, where he holds the positionsof Swanlund Endowed Chair; Center for AdvancedStudy Professor of Electrical and Computer Engi-
neering; Research Professor with the Coordinated Science Laboratory; andResearch Professor with the Information Trust Institute. He has publishedextensively in systems, control, communications, and dynamic games and hascurrent research interests in modeling and control of communication networks,control over heterogeneous networks, estimation and control with limitedsensing and transmission, resource allocation, management, and pricing innetworks, cooperative and noncooperative game theory for networks, mobileand distributed computing, and security and trust in computer systems.
Dr. Basar is currently the Editor-in-Chief of Automatica, the Editor of theBirkhäuser Series on Systems and Control, Managing Editor of the Annals of theInternational Society of Dynamic Games (ISDG), and a member of editorial andadvisory boards of several international journals on control, wireless networks,and applied mathematics. He has received several awards and recognitions overthe years, including the Medal of Science of Turkey in 1993, the DistinguishedMember Award in 1993, the Axelby Outstanding Paper Award in 1995, theIEEE Millennium Medal in 2000, the Bode Lecture Prize of the IEEE ControlSystems Society (CSS) in 2004, the Tau Beta Pi Drucker Eminent FacultyAward of UIUC in 2004, the Outstanding Service Award in 2005, the GiorgioQuazza Medal of the International Federation of Automatic Control (IFAC) in2005, the Richard Bellman Control Heritage Award of the American AutomaticControl Council (AACC) in 2006, the Honorary Doctorate (Doctor HonorisCausa) from Dogus University, Istanbul, in 2007, the Honorary Professorshipfrom Northeastern University, Shenyang, China, in 2008, and the Isaacs Awardof the ISDG in 2010. He is a member of the U.S. National Academy ofEngineering, a member of the European Academy of Sciences, a Fellow ofIFAC, a past president of CSS, a past (founding) president of ISDG, and thecurrent President of AACC.
Mérouane Debbah (SM’08) was born in Madrid,Spain. He received the M.Sc. and Ph.D. degreesfrom Ecole Normale Supérieure de Cachan, Cachan,France, in 1999 and 2002, respectively.
From 1999 to 2002, he was with Motorola Labs,where he worked on wireless local area networks andprospective fourth-generation systems. From 2002 to2003, he was a Senior Researcher with the ViennaResearch Center for Telecommunications, Vienna,Austria. From 2003 to 2007, he was an AssistantProfessor with the Mobile Communications Depart-
ment, Institut Eurecom, Sophia Antipolis, France. He is currently a Professorwith SUPELEC, Gif-sur-Yvette, France, where he is the Alcatel-Lucent Chairon Flexible Radio. His research interests are in information theory, signalprocessing, and wireless communications.
Dr. Debbah is a Wireless World Research Forum Fellow. He is the recipientof the “Mario Boella” prize award in 2005, the 2007 IEEE Global Telecommu-nications Conference General Symposium Best Paper Award, the Wi-Opt 2009Best Paper Award, the 2010 Newcom++ Best Paper Award, and the Valuetools2007, Valuetools 2008, and CrownCom 2009 Best Student Paper Awards.
Are Hjørungnes (SM’06) received the Sivilingeniør(M.Sc.) degree (with honors) from the NorwegianInstitute of Technology, Trondheim, Norway, in 1995and the Doktor ingeniør (Ph.D.) degree from theNorwegian University of Science and Technology,Trondheim, in 2000.
From August 2000 to December 2000, he was aResearcher with Tampere University of Technology,Tampere, Finland, within the Tampere InternationalCenter for Signal Processing. From March 2001 toJuly 2002, he was a Postdoctoral Fellow with the
Federal University of Rio de Janeiro, Rio de Janeiro, Brazil, within the SignalProcessing Laboratory. From September 2002 to August 2003, he was a Post-doctoral Fellow with the Helsinki University of Technology, Espoo, Finland,within the Signal Processing Laboratory. From September 2003 to August2004, he was a Postdoctoral Fellow within the Digital Signal Processing andImage Analysis Group, Department of Informatics, University of Oslo. He hasheld visiting appointments with the Image and Signal Processing Laboratory,University of California, Santa Barbara; the Signal Processing Laboratory,Federal University of Rio de Janeiro; the Mobile Communications Depart-ment, Eurecom Institute, Sophia-Antipolis, France; the University of Manitoba,Winnipeg, MB, Canada; the Alcatel-Lucent Chair with SUPÉLEC, Gif surYvette, France; the Department of Electrical and Computer Engineering, Uni-versity of Houston, Houston, TX; the Electrical and Computer Engineering De-partment, University of California, San Diego; and the Department of ElectricalEngineering, University of Hawaii at Manoa, Honolulu, HI. He is currently aProfessor with the Faculty of Mathematics and Natural Sciences, University ofOslo, Oslo, Norway, with an office located at the UNIK-University GraduateCenter. His current main research areas are signal processing, communications,and wireless networks.
Dr. Hjørungnes has been serving as an Editor for IEEE TRANSACTIONS ON
WIRELESS COMMUNICATIONS since March 2007. In 2010, he was a GuestEditor for the IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING
for the special issue on “Model Order Selection in Signal Processing Systems,”and in 2011, he will be a Guest Editor for the IEEE JOURNAL ON SELECTED
AREAS IN COMMUNICATIONS special issue on “Cooperative Networking-Challenges and Applications.” He coauthored papers winning the best paperawards at the 2007 IEEE International Conference on Wireless Communica-tions, Networking, and Mobile Computing the 7th International Symposiumon Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networksin 2009, and the 5th International Conference on Internet Monitoring andProtection in 2010.





























