Embed Size (px)
Citation preview

Application ReportSLUA371–September 2006
Closed-Loop Compensation Design of a SynchronousSwitching Charger Using bq2472x/3x
Lingyin Zhao........................................................................................................ PMP Portable Power
ABSTRACT
Design of the loop compensator is one of the key challenges in the circuit design of aswitching charger. This application report presents the internal control loop operation ofthe bq2472x/3x as well as the external compensator design guideline. The modeling ofthe nonlinear behavior of a switching charger is based on the state space averagemodel. A design example based on practical specifications is demonstrated.
Contents1 Buck-Type Charger Power Stage Small-Signal Model ........................................ 22 bq2472x/3x Control-Loop Model and Compensation Design ................................. 63 Design Example .................................................................................... 94 Reference .......................................................................................... 19
List of Figures
1 The Power Stage of a Buck-Type Charger ..................................................... 22 Three-Terminal Model of a PWM Switch in CCM .............................................. 23 Control-to-Output Small-Signal Model in CCM ................................................. 34 Three-Terminal Model of a PWM Switch in DCM .............................................. 45 Control-to-Output Small-Signal Model in DCM ................................................. 56 PWM and Error Amplifiers Block of bq2472x/3x................................................ 67 Simplified Control-Loop Block Diagram.......................................................... 78 A Typical Bode Plot of the Converter Control-to-Output Gain Under CCM Conditions ... 89 A Type III Compensator ........................................................................... 810 Bode Plot of a Typical Type III Compensator................................................... 811 Control-to-Output-Voltage Transfer Function.................................................. 1012 Control-to-Charge-Current Transfer Function ................................................. 1113 Control-to-Input-Current Transfer Function .................................................... 1214 Transfer Function of Gvd, the Compensator and the Entire Voltage Loop Gain .......... 1315 Single-Cell Li-Ion Battery Equivalent Circuit Model (18560)................................. 1416 Output-Voltage Loop Gain TV (CCM)........................................................... 1517 Charge-Current Loop Gain Tis (CCM) .......................................................... 1618 Input-Current Loop Gain Tii (CCM).............................................................. 1719 Output-Voltage Loop Gain TV (DCM)........................................................... 1820 Input-Current Loop Gain Tii (DCM) ............................................................. 19
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 1Submit Documentation Feedback

www.ti.com
1 Buck-Type Charger Power Stage Small-Signal Model
Q2
VIN
ISL
Q1
RC2 Z
L
RL VORSNS
C2
IL
RC1
C1
1.1 Continuous Conduction Mode (CCM) Small-Signal Model
Q1
Q2
ca
p
(a) a PWM Switch
a c
p
1 D1I dC
^
(b) Small-Signal Model
Vap
Dˆd
Buck-Type Charger Power Stage Small-Signal Model
A typical stage of a synchronous buck-type switching battery charger is shown in Figure 1.
Figure 1. The Power Stage of a Buck-Type Charger
The small-signal model is obtained from the relationships among the perturbation in average terminalquantities at a given dc operating point. The model is different under continuous conduction mode (CCM)and discontinuous conduction mode (DCM).
The average values of the switch network terminal waveforms can be determined in terms of the converterstate variables and the converter independent inputs. The basic assumption is made that the natural timeconstants of the converter network are much longer than the switching period Ts. This assumptioncoincides with the requirement for small switching ripple. The resulting averaged model predicts thelow-frequency behavior of the system, while neglecting the high-frequency switching harmonics [1]. Thethree-terminal model for a PWM switch network in CCM is illustrated in Figure 2.
Figure 2. Three-Terminal Model of a PWM Switch in CCM
To perform the CCM small-signal analysis, the PWM switch in the buck converter is substituted with thethree-terminal model in CCM and Vin is shorted, as shown in Figure 3.
2 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
L
C2C1
RC1 RC2
RSNS
ZL
RLL
is
i ov
1 D
dD
Vin
ii L
C2C1
RC1 RC2
RSNS
ZL
RLL
is
i ov
1 D
dD
Vin
ii
Gvd(s) V
o
d Vin ZL
sz1
1 sz2
13s3 2s2 1s 0 (1)
Gisd(s) i
s
d Vin
sz1
1 sz3
13s3 2s2 1s 0 (2)
Giid(s)i
i
d IL Vin
2s2 1s 1
3s3 2s2 1s 0 (3)
z11
RC1 C1 (4)
z21
RC2 C2 (5)
z3 1RC1 ZL
C2 (6)
3 RC2 ZL RSNS RC1RC2 ZL
L C1 C2 (7)
2 RL RC1RC2 ZL RSNS RC1
RC2 ZL C1 C2 ZL RSNS RC1
L C1 RC2 ZL L R2
C1 C1 C2 (8)
1 RC2 ZL RSNS RLRC2 ZL
C2 ZL RSNS RL RL RC1
C1 L R2L C1
0 ZL RSNS RL (10)
2 RC2 ZL RSNS RC1 RC2 ZL
C1 C2 (11)
1 ZL RSNS RC1 C1 RC2 ZL
C2 (12)
Buck-Type Charger Power Stage Small-Signal Model
Figure 3. Control-to-Output Small-Signal Model in CCM
The open-loop control-to-output-voltage transfer function is given as:
Compared to a regular buck-type converter, this topology results in one more zero and one more pole,both at high frequencies under normal conditions.
The open-loop control-to-charge-current transfer function is given as:
The open-loop control-to-input-current transfer function is given as:
in which,
(9)
Approximately, Gvd (s) and Gisd (s) can be presented as
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 3Submit Documentation Feedback

www.ti.com
Gvd(s) Vin ZL
ZL RSNS RL
sz1
1 sz2
1
s2
20 s0Q
1 sp1
1(13)
G isd(s) Vin 1
ZL RSNS RL
sz1
1 sz3
1
s2
20 s0Q
1 sp1
1(14)
p1 ZL RSNS RL
C1 C2
RC2 ZL RSNS RC1 RC2 ZL
C1 C2 (15)
0 1L C1 C2
(16)
Q 10 RL RC1
C1 C2
(17)
1.2 Discontinuous Conduction Mode (DCM) Small-Signal Model
MVoVin (18)
D 2(M2)2
M2 1
K(M 2)2
M2 1
(19)
K2L fs
VoIo (20)
Q1
Q2
ca
p
(a) a PWM Switch
a c
p
dko
acv
ogacfvg cpv
dki
ig
a c
p
dko
acv
ogacfvg cpv
dki
ig
(b) Small-Signal Model
Buck-Type Charger Power Stage Small-Signal Model
in which,
Under DCM conditions, assume the dc voltage gain is
The duty cycle is given by
in which,
The three-terminal model for a PWM switch network in CCM is illustrated in Figure 4.
Figure 4. Three-Terminal Model of a PWM Switch in DCM
4 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
ki2IaD (21)
ko2IpD (22)
giIa
Vac (23)
goIp
Vcp (24)
gf2IpVac (25)
dko og
ig
fg
dki L
C2C1
RC1 RC2
RSNS
ZL
RL Li si ov
ii dko og
ig
fg
dki L
C2C1
RC1 RC2
RSNS
ZL
RL Li si ov
ii
giD2
2L fs (26)
ki2IoM
D (27)
kd ki ko2IoD (28)
r 1gi go gf
VoIo
(I M)(29)
Gvd_DCM(s) v
o
d kd ZL
sz1
1 sz2
13s3 2s2 1s 0 (30)
G iid_DCM(s)i
i
d ki gi kd r gi Kd r
2s2 1s 13s3 2s2 1s 0 (31)
3 L C1 C2
r RC2 ZL RSNS RC1RC2 ZL
(32)
Buck-Type Charger Power Stage Small-Signal Model
To perform the DCM small-signal analysis, the PWM switch in the buck converter is substituted with thethree-terminal model in DCM and Vin is shorted, as shown in Figure 5.
Figure 5. Control-to-Output Small-Signal Model in DCM
In a buck converter operating in DCM, the following equations can be obtained:
The open-loop, control-to-output-voltage transfer function is given as:
The open-loop, control-to-input-current transfer function is given as:
in which,
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 5Submit Documentation Feedback

www.ti.com
2 C1 C2
r RC2 ZL RSNS RC1RC2 ZL
RC1 RSNS RC2 ZL
LrRSNS RC1 ZL
C1 RC2 ZL C2
(33)
1 C1r RL r RSNS RC1 ZL
RC1 RSNS RC1 ZL
RL r RSNS RC2 ZL
RC2 ZL L
r (34)
0RL r RSNS ZL
r (35)
2 C1 C2 RC2 ZL RSNS RC1RC2 ZL
(36)
1 RSNS RC1 ZL C1 RC2 ZL
C2 (37)
2 bq2472x/3x Control-Loop Model and Compensation Design
2.1 bq2472x/3x Control-Loop Model
bq2472x/3x Control-Loop Model and Compensation Design
The PWM and error amplifiers block of bq2472x/3x is illustrated in Figure 6. It consists of three feedbackloops: output-voltage loop, charge-current loop, and input-current loop (DPM loop). However, only one ofthem dominates at one time. The simplified control-loop block diagram is depicted in Figure 7.
Figure 6. PWM and Error Amplifiers Block of bq2472x/3x
6 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
d
ii
ov
Power Stage
G vd, G isd, G iid
-A(s ) FGFM
si
dˆ
cv
iv
d
ii
ov
Power Stage
G vd, G isd, G iid
-A(s ) FGFM
si
dˆ
cv
iv
FG grd gv
16 6 1 (for 3 cell)
18 6 0.75 (for 4 cell)
(38)
FG RSNS gSR Tdamp1 40 RSNS Tdamp1 (39)
Tdamp1(s) 1
shfp1
1 shfp2
1(40)
FG RSNS gAC Tdamp2 40 RSNS Tdamp2 (41)
Tdamp2(s) Tdamp1(s)(42)
FM 1Vp (43)
Tv Gvd FG A(s) FM (44)T is Gisd FG A(s) FM (45)T ii Giid FG A(s) FM (46)
bq2472x/3x Control-Loop Model and Compensation Design
Figure 7. Simplified Control-Loop Block Diagram
In Figure 7, FG is the feedback gain whose value depends on which loop is operating.
For the output-voltage loop,
in which grd and gv are the resistor divider gain and the voltage amplifier gain, respectively. For thecharge-current loop,
in which RSNS and gSR are the charge-current-sense resistor value and the charge-current amplifier gain,respectively. Tdamp1 is the transfer function of the network added to damp the high-frequency harmonicsfor this loop. It contains a pole at 60 kHz and another at 150 kHz.
For the DPM loop,
in which RSNA and gAC are the adapter input current-sense resistor value and the input current amplifiergain, respectively. Tdamp2 is the transfer function of the network added to damp the high-frequencyharmonics for this loop. It contains a pole at 60 kHz and another at 150 kHz.
In Figure 7, A(s) is the compensator transfer function and FM is the control voltage to duty-cycle transferfunction. To generate a PWM drive signal, the control voltage Vc is compared with a ramp waveform, asshown in Figure 6. The ramp peak voltage Vp = Vcc/10. Thus, the value of FM can be obtained as:
The three loop gains are given by
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 7Submit Documentation Feedback

www.ti.com
2.2 bq2472x/3x Compensator Design
f - Frequency
Ma
gn
itu
de
- d
B
C3_com
R1_com
C2_com
1_com R3_com
R2_com
FBOEAI3_com
1_com
2_com
C1_com 3_com
2_com
EAO
f - Frequency
Magnitude -
dB
Integrator
Zero 1 Zero 2
Pole 1 Pole 2
Integrator
Zero 1 Zero 2
Pole 1 Pole 2
bq2472x/3x Control-Loop Model and Compensation Design
From Equation 13 and Equation 14, it can be seen that the power stage CCM open-loop transfer functionsare basically a three-pole-two-zero system. A typical Bode plot of the converter control to output gainunder CCM conditions is shown in Figure 8. However, it can be simplified as a double-pole systembecause ωz1, ωz2, and ωp1 are normally located at high frequencies where the average model is not validany longer.
Figure 8. A Typical Bode Plot of the Converter Control-to-Output Gain Under CCM Conditions
A Type III compensator is a promising candidate for this application. The typical realization of a Type IIIcompensator is demonstrated in Figure 9. Its typical frequency response is depicted in Figure 10.
Figure 9. A Type III Compensator
Figure 10. Bode Plot of a Typical Type III Compensator
8 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
A(s) K
sz1_com
1 sz2_com
1
s sp1_com
1 sp2_com
1(47)
K 1
R1_com C1_com C3_com (48)
z1_com1
R3_com C1_com (49)
z2_com 1R1_com R2_com C2_com (50)
p1_com1
R2_com C2_com (51)
p2_com1
R3_comC1_comC3_com
C1_comC3_com (52)
3 Design Example
3.1 Specifications
Design Example
An integrator is needed for a high dc gain. Two zeroes need to be put below the loop gain crossoverfrequency fc to compensate the excessive phase lag due to the integrator and the power stage complexpole pair. In order to attenuate the high-frequency noise, two high frequency poles are added to ensurethe magnitude of the loop gain keeps decreasing after the 0-dB crossover. The two poles must be placedbelow half of the switching frequency.
The transfer function of the compensator is given as:
where
Vin = 19 V, L = 10 µH, C1 = C2 = 20 µF, RSNS = RSNA = 10 mΩ, RC1 = RC2 = 10 mΩ, RL = 20mΩ,Vbat = 9 V – 12.6 V (3s2p), Ichrg = 4 A, fs = 300 kHz
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 9Submit Documentation Feedback

www.ti.com
3.2 Power Stage Open-Loop Transfer Functions (CCM)
20
60
0
-20
-60
1 10 100 1 k 10 k 100 k 1 M
f - Frequency - Hz(a) Gain
Ma
gn
itu
de
- d
B
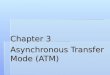
Z = 17.8L W
Z = 2.25L W
f - Frequency - Hz(b) Phase
1 10 100 1 k 10 k 100 k 1 M
180
0
-180
Z = 17.8L W
Z = 2.25L W
Ph
as
e -
De
g
Design Example
The transfer functions of the converter in CCM are illustrated in Figure 11, Figure 12, and Figure 13.
Figure 11. Control-to-Output-Voltage Transfer Function
10 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
100
0
-100
1 10 100 1 k 100 k10 k 1 M
f - Frequency - Hz(a) Gain
Ma
gn
itu
de
- d
B
Z = 2.25L W
Z = 17.8L W
Z = 17.8L W
Z = 2.25L W
1 10 100 1 k 100 k10 k 1 M
f - Frequency - Hz(b) Phase
100
0
-180
Ph
as
e -
de
g
Design Example
Figure 12. Control-to-Charge-Current Transfer Function
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 11Submit Documentation Feedback

www.ti.com
100
20
0
-20
-100
1 10 100 1 k 10 k 100 1 M
Z = 2.25L W
Z = 17.8L W
Ma
gn
itu
de
- d
B
f - Frequency - Hz(a) Gain
Z = 2.25L W
Z = 17.8L W
1 10 100 1 k 10 k 100 1 M
f - Frequency - Hz(b) Phase
180
0
-180
Ph
as
e -
de
g
3.3 Compensator Design Procedure
z11
RC1 C1 796 kHz
(53)
z21
RC2 C2 796 kHz
(54)
0 1L C1 C2
8 kHz
(55)
Design Example
Figure 13. Control-to-Input-Current Transfer Function
From the preceding calculation, the following parameters can be obtained:
Place the two compensator zeros before the resonant frequency of the converter (f0) to improve the DCMstability.
12 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
z1_com 2 0.5 f0 25 kHz(56)
p1_com p2_com12
2fs 943 kHz(57)
p1_com p2_com12
2fs 943 kHz(58)
TV(S)
Gvd(S)
A(S)
80
0
-80
1 10 1 k100 10 k 100 1 M
f - Frequency - Hz(a) Gain
Ma
gn
itu
de
- d
B
TV(S)
Gvd(S)
A(S)
1 10 1 k100 10 k 100 1 M
f - Frequency - Hz(b) Phase
180
0
-180
Ph
as
e -
de
g
Design Example
Select
Because ωz1, ωz2 are higher than half of the switching frequency, place the two high-frequency poles at0.5fs:
Set a crossover frequency fc (voltage loop) of 10 kHz – 20 kHz. Select K = 2500 to make fc≈ 15 kHz withabout 60° phase margin. Normally, a phase margin greater than 40° is desirable. The transfer function ofGvd, the compensator and the entire voltage loop gain Tv are shown in Figure 14.
Figure 14. Transfer Function of Gvd, the Compensator and the Entire Voltage Loop Gain
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 13Submit Documentation Feedback

www.ti.com
3.4 Check Loop Gains With Various Loads
3.4.1 Li-Ion Battery Equivalent Circuit Model
L C1RSER
Rhf R1 R2
C2
NOTE: R = 13.77 m , C = 0.337672 F, R = 47.15 m ,
C = 1.79935 F, R = 65.18 m , R = 5.8 , L = 0.637 H
1 1 2
2 SER hf
W W
W W m
3.4.2 CCM Loop Gains With Various Loads (Including Battery Load)
Design Example
Assuming R1_com = 200k, based on equations (48)–(52), the preliminary compensator component valuescan be determined as:
R1_com = 200kΩ, R2_com = 7.5kΩ, R3_com = 20kΩ, C1_com = 2000pF, C2_com = 130pF, C3_com = 51pF.
Figure 15 shows the typical Li-ion battery equivalent circuit model used for the small-signal analysis. lt isapproximately correct for charged state from 100% of SOC to 20% of SOC. Impedance varies frommanufacturer to manufacturer up to two times and from cell to cell up to ±15%. For a discharged statebelow 20% of SOC, the impedance starts to increase rapidly. The particular value the impedance reachesdepends on manufacturer, but it can be roughly modeling by multiplying R1 and R2 by 3.
NOTE: R1=13.77 mΩ, C1=0.337672 F, R2=47.15 mΩ, C2=1.79935 F, RSER= 65.18 mΩ, Rhf=5.8 Ω, L=0.637 µH
Figure 15. Single-Cell Li-Ion Battery Equivalent Circuit Model (18560)
Plot the output-voltage loop gain, and check the stability and bandwidth with a 3s2p battery load, asshown in Figure 16.
Plot the charge-current and input-current loop gains, and check the stability and bandwidth. The entirecharge-current and input-current loop gains Tis and Tii are shown in Figure 17 and Figure 18, respectively.
14 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
100
0
-1001 10 100 1 k 10 k 100 k 1 M
Z = 17.8L W
Z =2.25L W
Z = Zbat(s)L
f - Frequency - Hz(a) Gain
Ma
gn
itu
de
- d
B
100
0
-100
Ph
as
e -
de
g
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(b) Phase
Z = 17.8L W
Z =2.25L W
Z = Zbat(s)L
Design Example
Figure 16. Output-Voltage Loop Gain TV (CCM)
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 15Submit Documentation Feedback

www.ti.com
Design Example
Figure 17. Charge-Current Loop Gain Tis (CCM)
16 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
100
0
-100
Ma
gn
itu
de
- d
B
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(a) Gain
Z = 17.8L W
Z =2.25L W
Z = Zbat(s)L
180
0
-180
Ph
as
e -
de
g
Z = 17.8L W
Z =2.25L W
Z = Zbat(s)L
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(b) Phase
Design Example
Figure 18. Input-Current Loop Gain Tii (CCM)
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 17Submit Documentation Feedback

www.ti.com
3.5 Check Loop Gains Under DCM Condition
100
0
-100
Ma
gn
itu
de
- d
B
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(a) Gain
I = 40 mA
Z =315
O
L W
I = 40 mA
Z = Zbat(s)O
L
I = 700 mA
Z = 17.8
O
L W
180
0
-180
Ma
gn
itu
de
- d
B
I = 40 mA
Z =315
O
L W
I = 40 mA
Z = Zbat(s)O
L
I = 700 mA
Z = 17.8
O
L W
10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(a) Gain
1
Design Example
Plot the output-voltage and input-current loop gains, and check the stability and bandwidth. The entireoutput-voltage and input-current loop gains Tv and Tii are shown in Figure 19 and Figure 20, respectively.
Figure 19. Output-Voltage Loop Gain TV (DCM)
18 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x SLUA371–September 2006Submit Documentation Feedback

www.ti.com
I = 40 mA
Z =315
O
L W
I = 40 mA
Z = Zbat(s)O
L
I = 700 mA
Z = 17.8
O
L W
50
0
-100
Ma
gn
itu
de
- d
B
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(a) Gain
180
0
-180
Ma
gn
itu
de
- d
B
1 10 100 1 k 10 k 100 k 1 Mf - Frequency - Hz
(b) Phase
I = 40 mA
Z =315
O
L W
I = 40 mA
Z = Zbat(s)O
L
I = 700 mA
Z = 17.8
O
L W
4 Reference
Reference
Figure 20. Input-Current Loop Gain Tii (DCM)
From the transfer function Bode plots obtained, it is seen that this compensator design offers adequatephase margins and bandwidths for all three loops. If not, the parameters (K, ωz1_com, ωz2_com) can beadjusted to get a reasonable design.
1. R. W. Erickson, D. Maksimvić, Fundamentals of Power Electronics (Second Edition), Kluwer AcademicPublishers, Sixth Printing 2004.
2. Fred C. Lee, Modeling and Control Design of DC/DC Converters, CPES Lecture Notes, Virginia Tech,2004.
SLUA371–September 2006 Closed-Loop Compensation Design of a Synchronous Switching Charger Using bq2472x/3x 19Submit Documentation Feedback

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,enhancements, improvements, and other changes to its products and services at any time and to discontinueany product or service without notice. Customers should obtain the latest relevant information before placingorders and should verify that such information is current and complete. All products are sold subject to TI’s termsand conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale inaccordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TIdeems necessary to support this warranty. Except where mandated by government requirements, testing of allparameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible fortheir products and applications using TI components. To minimize the risks associated with customer productsand applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or processin which TI products or services are used. Information published by TI regarding third-party products or servicesdoes not constitute a license from TI to use such products or services or a warranty or endorsement thereof.Use of such information may require a license from a third party under the patents or other intellectual propertyof the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is withoutalteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproductionof this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable forsuch altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for thatproduct or service voids all express and any implied warranties for the associated TI product or service andis an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Following are URLs where you can obtain information on other Texas Instruments products and applicationsolutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DSP dsp.ti.com Broadband www.ti.com/broadband
Interface interface.ti.com Digital Control www.ti.com/digitalcontrol
Logic logic.ti.com Military www.ti.com/military
Power Mgmt power.ti.com Optical Networking www.ti.com/opticalnetwork
Microcontrollers microcontroller.ti.com Security www.ti.com/security
Low Power Wireless www.ti.com/lpw Telephony www.ti.com/telephony
Video & Imaging www.ti.com/video
Wireless www.ti.com/wireless
Mailing Address: Texas Instruments
Post Office Box 655303 Dallas, Texas 75265
Copyright 2006, Texas Instruments Incorporated