Embed Size (px)
Citation preview

Closed-form expression for the collisionprobability in the IEEE Ethernet Passive Optical
Network registration scheme
Swapnil Bhatia and Radim BartošDepartment of Computer Science, University of New Hampshire, Durham, New Hampshire 03824
[email protected]; [email protected]
RECEIVED 8 SEPTEMBER 2005; REVISED 12 NOVEMBER 2005;ACCEPTED 13 NOVEMBER 2005; PUBLISHED 20 DECEMBER 2005
We derive a closed-form expression for the message collision probability in theIEEE 802.3ah Ethernet Passive Optical Network (EPON) registration scheme.The expression obtained, although based on an approximation, shows a goodmatch with simulation results. We use the results of our analysis to compute thesize of the most efficient contention window and the most efficient number ofnodes serviced by a given window size. © 2005 Optical Society of America
OCIS codes: 060.2330, 060.4250.
1. Motivation
Protocols for emerging access network technologies such as Data-Over-Cable Service In-terface Specification (DOCSIS) [1], Ethernet Passive Optical Network (EPON) [2], andsome wireless technologies include a preliminary phase where the subscriber device mustregister with a head end or base station residing at a central office. Since this is the firstcommunication between the head end and the subscriber device, no information about keyparameters, such as latency or timing, is available to either party. Subscriber devices maybe located at random distances unknown to the head end. As a result, most protocols relyon some collision avoidance scheme to reduce contention in the use of the communicationchannel. The recently adopted IEEE 802.3ah EPON standard prescribes the random delayscheme for this purpose. In this scheme, the head end broadcasts the size of a contentioninterval. The nodes, upon receiving this message, wait for a uniformly random intervaland then transmit their registration message. In this paper, we derive a closed-form expres-sion for the probability of message collision in this scheme and validate our result throughsimulation.
To our knowledge, this is the first attempt at computing the probability of collision forthe IEEE EPON registration scheme. Although previous work in this area [3, 4] serves asan excellent general reference, its focus has primarily been on the stability and throughputof multiaccess schemes. Moreover, most of the assumptions (Poisson arrivals, backloggednodes, etc.) are either not relevant to the IEEE EPON registration scheme or are out ofthe scope of our current work. For example, before the average success probability in asingle registration cycle—the focus of our present work—is known, the multistep perfor-mance of the scheme cannot be analyzed. Our own past work [5] focuses on the high loadperformance characterization of the IEEE EPON registration scheme through simulations.A more recent analysis [6] is restricted only to the simpler case of identically distancednodes. We propose a more generic model applicable to identically distanced as well as ran-domly distributed nodes. Our model includes the random round-trip delay together with therandom contention window size. The model is parameterized by message size, contentionwindow size, and round-trip time and is therefore directly applicable to a practical analysisof the IEEE EPON registration protocol.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 1

2. Modeling Registration of an IEEE EPON Device
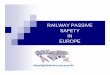
Figure 1 illustrates the IEEE EPON registration scheme. In this paper, we will focus ononly the first step in the registration scheme: the transmission of the registration request.Subsequent steps cannot occur until the first step is completed successfully. As per theEPON protocol, the head end broadcasts a discovery message to signal the beginning of aspecial interval reserved for new-node registration. A new node, upon receiving it, replieswith a registration request message transmitted after a random wait. If two such registrationmessages, say of length k each, arrive at the head end overlapping in time, then there is acollision. Thus, to model a collision we must calculate the arrival time of a message at thehead end. We observe that this arrival time is a sum of the one-way propagation time of thebroadcast message from the head end to the node, a random wait at the node, and anotherone-way propagation time of the registration request message from the node to the headend.
Randomdelay
GATE
OLT ONU
REGISTER_REQ
REGISTER_ACK
REGISTER
GATE
win
dow
Dis
cove
ry
Y
X ′
X ′
2p+
w Z
Z = X + Y
X = 2X ′
Fig. 1. The IEEE EPON Registration scheme.
2. Modeling Registration of an IEEE EPON Device
Fig. 1 illustrates the IEEE EPON registration scheme. In this paper, we will focusonly on the first step in the registration scheme: the transmission of the registrationrequest. Subsequent steps cannot occur until the first step is completed successfully.As per the EPON protocol, the headend broadcasts a discovery message to signalthe beginning of a special interval reserved for new-node registration. A new node,upon receiving it, replies with a registration request message transmitted after arandom wait. If two such registration messages, say of length k each, arrive at theheadend overlapping in time, then there is a collision. Thus, to model a collisionwe must calculate the arrival time of a message at the headend. We observe thatthis arrival time is a sum of the one-way propagation time of the broadcast messagefrom the headend to the node, a random wait at the node, and another one-waypropagation time of the registration request message from the node to the headend.
Due to technological constraints on the power and reach of a transmitted signal,the IEEE EPON standard [2] fixes the maximum distance from the headend atwhich a node may be located. We assume the maximum reach of our network to besuch as to result in a maximum one-way propagation time of p and the maximumrandom wait time to be w (also fixed by the headend). Thus, the arrival time canvary between a minimum of 0 and a maximum of 2p+w as shown in Fig. 1. However,since the IEEE EPON standard [2] places no constraints on the contention windowsize w ≥ 0, we let M = max(2p, w) and m = min(2p, w). Thus, M ≥ m.
Let X, Y and Z be random variables. Let X, Y be independent and have auniform distribution with X ∈ Uniform[0, M ], Y ∈ Uniform[0, m], M ≥ m ≥ 0.Depending on the magnitudes of p and w, X and Y will interchangeably model thetwo-way propagation time and the random wait. To simplify the exposition, we firstconsider m > 0 and add m = 0 as a separate case later. Let fX , fY denote theirprobability mass function of X and Y respectively. Thus, fX(x) = M−1 and fY (y) =m−1. Let Z = X +Y . Thus, Z models the arrival time of a message from a node atthe headend as shown in Fig. 1. Since X and Y are independent, their joint densityfXY (x, y) = (Mm)−1. Let FZ(z) = P (Z ≤ z) denote the cumulative distributionfunction (CDF) of Z. We compute the CDF of Z, by integrating X + Y = Z w.r.t
2
Fig. 1. IEEE EPON registration scheme.
Due to technological constraints on the power and reach of a transmitted signal, theIEEE EPON standard [2] fixes the maximum distance from the head end at which a nodemay be located. We assume the maximum reach of our network to be such as to resultin a maximum one-way propagation time of p and the maximum random wait time to bew (also fixed by the head end). Thus, the arrival time can vary between a minimum of0 and a maximum of 2p + w as shown in Fig. 1. However, the IEEE EPON standard [2]places no constraints on the contention window size w≥ 0. For convenience, we also defineM = max(2p,w) and m = min(2p,w). Thus, M ≥ m.
Let X , Y , and Z be random variables. Let X and Y be independent and have a uniformdistribution with X ∈Uniform [0,M] and Y ∈Uniform [0,m], where M ≥m≥ 0. Dependingon the magnitudes of p and w, X and Y will each model the two-way propagation time orthe random wait. To simplify the exposition, we first consider m > 0 and add m = 0 asa separate case later. Let fX and fY denote the probability mass functions of X and Y ,respectively. Thus, fX (x) = M−1 and fY (y) = m−1. Let Z = X +Y . Thus, Z models thearrival time of a message from a node at the head end as shown in Fig. 1. Since X and Yare independent, their joint density is fXY (x,y) = (Mm)−1. Let FZ (z) = P(Z ≤ z) denotethe cumulative distribution function (CDF) of Z. We compute the CDF of Z by integratingX +Y = Z with respect to z [7]. Our main derivation involves the computation of many
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 2

such integrals and we omit the details of these calculations due to space constraints. Thelimits used for each integral are specified in the accompanying figures and should aid thereader in computing the integrals, if desired. Thus, we have
FZ (z) =
0 if z < 0z2/2Mm if z ≤ m(2z−m)/2M if m < z ≤ M(2zM +2zm−m2− z2−M2
)/2mM if M < z ≤ M +m
1 if z > M +m
. (1)
To find the probability mass function fZ (z), we differentiate with respect to z to get
fZ (z) =
0 if z < 0f1 (z) = z/mM if z ≤ mf2 (z) = 1/M if m < z ≤ mf3 (z) = (m+M− z)/mM if M < z ≤ M +m0 if z > M +m
. (2)
3. Formulating the Collision Event
Let n denote the total number of devices attempting to send their respective registrationrequest messages. Let Zi denote the arrival time of the message from the device 1 ≤ i ≤ nat the head end. (We will use Zi to refer to the device i as well as the random variable,depending on the context.) Since all the devices behave identically, any result for a singledevice will be true for any device. Fix Z1 as the device under observation. Then, a successfultransmission by Z1 can be expressed as the event
n∩
i=2[| Z1−Zi |> k] =
n∩
i=2[(Z1−Zi > k)∪ (Z1−Zi <−k)]
=n∩
i=2[(Zi < Z1− k)∪ (Zi > Zi + k)] .
(3)
Suppose Z1 = t, where 0 ≤ t ≤ M + m; i.e., the transmission from device 1 arrives at thehead end at some time t. Under this condition, a successful transmission event for Z1 canbe expressed as
n∩
i=2[| Z1−Zi |> k | Z1 = t ] =
n∩
i=2[(Zi < t− k)∪ (Zi > t + k)] . (4)
Since all the devices follow the same registration protocol and transmit registration mes-sages independently of each other, the Zi are all independent and identically distributedwith densities described by Eq. (1). Therefore, the probability of a successful transmissionby Z1 can be expressed as
P(
n∩
i=2[| Z1−Zi |> k | Z1 = t]
)=
n
∏i=2
P [(Zi < t− k)∪ (Zi > t + k)]
= P[(Z2 < t− k)∪ (Z2 > t + k)]n−1,
(5)
where we use Z2 to represent any other single device. Since
P [(t− k) < Z2 < (t + k)] = FZ2 (t + k)−FZ2 (t− k) ,
the remaining probability in the tails can be expressed as
P[(Z2 < t− k)∪ (Z2 > t + k)](n−1) = {1− [FZ2 (t + k)−FZ2 (t− k)]}(n−1). (6)
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 3

Hence, the probability of a successful transmission by Z1 given that Z1 = t is
P(
n∩
i=2[| Z1−Zi |> k | Z1 = t]
)= {1− [FZ2 (t + k)−FZ2 (t− k)]}(n−1). (7)
Finally, applying the law of total probability,
P(
n∩
i=2[| Z1−Zi |> k]
)=
∫∞
−∞
P(
n∩
i=2[| Z1−Zi |> k | Z1 = t]
)P(Z1 = t)dt
=∫
∞
−∞
[1−FZ2 (t + k)+FZ2 (t− k)](n−1) fZ2 (t)dt.(8)
FZ2 (z) and fZ2 (z) are available from Eqs. (1) and (2). Figure 2 shows the probability massfunction fZi (z) of any device Zi along with an illustration of the condition Z1 = t. From Fig.2, we can see that due to the piecewise structure of fZi (z), the limits for integrating withrespect to Z = t will depend heavily on the relative magnitudes of k, m, and M. Moreover,the limits will also depend on the position of t relative to k, m, and M. For example, considerthe simplest case where m = 0, M > 0, and 0 < k ≤ M− k. For this one permutation ofparameters, we must again split the calculation of Eq. (8) for various relative positions oft with respect to the remaining intervals shown in Fig. 2. Thus, we would have to considerseparately t < 0, 0 ≤ t < k, k ≤ t < M− k, M− k ≤ t < M, and M ≤ t < M + k. Note thatthese subintervals are specific to the single simple case above. For the other more complexcases, the description of subintervals to be considered will be different and their numberwill be larger.
fZi(z)
1M
Zi
m M M + mt− k
t
M + m− kt + k M − k M + k
m + km− k
zm
M
m+
M−
z
mM
Fig. 2. Probability mass function fZi(z) with the condition Z1 = t.
Mk
M
M + m
Z 1− Z 2
=k
Z 1− Z 2
=−k
Z1
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z2
m
k
M + m
1412
10014 8
0.002
12 z1610
0.004
8 46
0.006
z2 4 2
0.008
2 00
0.01
Fig. 3. Left: Computing the probability of |Z1 − Z2| ≤ k. Right: Joint density ofZ1, Z2 (in µs) with M = 10, m = 5.
m < M . The shaded area in Fig. 3 (left) shows the region where |Z1 − Z2| ≤ k.Let P be the event |Z1 − Z2| ≤ k. To find the probability of the event P , as men-tioned earlier, we must consider several cases arising from the magnitudes of theparameters k, m and M relative to each other. In each case, we also need to considerwhether m, M ≤ k or m, M > k. Finally, M + m < k or m = 0 are other specialcases. Together, all the scenarios result in a function of the form expressed in Fig.4. Due to the absence of the conditional, the number of cases to be considered issignificantly reduced. Note that were the conditional present, each branch of thetree in Fig. 4 would result in many more branches. Due to our assumption aboutthe independence of events in Eqn. (3), we are able to prune the tree much earlier.
Figs. 5—11 illustrate each of the Pi in Fig. 4. Using these figures, we calculate theprobability contained in the shaded region for each Pi. Integrating piecewise withinthe limits assigned to the shaded region in each figure, we obtain the followingexpressions for each of the Pi in Fig. 4:
P1 =k(k3 − 4m3 − 4mk2 + 12Mm2)
6m2M2(9)
P2 =(12Mk −m2 − 6k2)
6M2(10)
5
Fig. 2. Probability mass function fZi (z) with the condition Z1 = t.
Clearly, the present approach will lead to a large number of subintervals over whichthe calculation of Eq. (8) will have to be performed—a tedious process. Notice that, outof all the cases, those introduced due to the relative magnitudes of our parameters k, m,and M are unavoidable. However, the subcases due to the conditional Z1 = t have beenintroduced only because the events in Eq. (3) are not independent. If an assumption weremade as to the independence of those events, then a number of subcases would be avoided.Specifically, all the subintervals introduced due to the conditional Z1 = t could be avoidedat the expense of introducing some error into the calculation. In Section 4, we explore thisapproach and obtain an approximation that shows a good match with values obtained fromsimulations.
4. Derivation of an Approximating Expression
Consider again, two independent identically distributed random variables Z1 and Z2 withprobability mass functions fZ1 (z1) and fZ2 (z2) as derived in Eq. (2). Consider their joint
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 4

density. Due to the piecewise structure of fZ (z), the joint density of Z1 and Z2 will comprisenine regions defined by the three cases each for Z1 and Z2 as illustrated in Fig. 3. Figure3 (right) shows the joint density of Z1 and Z2 for examples M = 10 µs and m = 5 µs. Asis clear from Eq. (2), the joint density will plateau for m ≤ Z1 and Z2 ≤ M when m <M. The shaded area in Fig. 3 (left) shows the region where | Z1 − Z2 |≤ k. Let P be theevent | Z1 − Z2 |≤ k. To find the probability of event P, as mentioned earlier, we mustconsider several cases arising from the magnitudes of the parameters k, m, and M relativeto each other. In each case, we also need to consider whether m,M ≤ k or m,M > k. Finally,M+m < k or m = 0 are other special cases. Together, all the situations result in a function ofthe form expressed in Fig. 4. Due to the absence of the conditional, the number of cases tobe considered is significantly reduced. Note that, were the conditional present, each branchof the tree in Fig. 4 would result in many more branches. Due to our assumption about theindependence of events in Eq. (3), we are able to prune the tree much earlier.
fZi(z)
1M
Zi
m M M + mt− k
t
M + m− kt + k M − k M + k
m + km− k
zm
M
m+
M−
z
mM
Fig. 2. Probability mass function fZi(z) with the condition Z1 = t.
Mk
M
M + m
Z 1− Z 2
=k
Z 1− Z 2
=−k
Z1
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z2
m
k
M + m
1412
10014 8
0.002
12 z1610
0.004
8 46
0.006
z2 4 2
0.008
2 00
0.01
Fig. 3. Left: Computing the probability of |Z1 − Z2| ≤ k. Right: Joint density ofZ1, Z2 (in µs) with M = 10, m = 5.
m < M . The shaded area in Fig. 3 (left) shows the region where |Z1 − Z2| ≤ k.Let P be the event |Z1 − Z2| ≤ k. To find the probability of the event P , as men-tioned earlier, we must consider several cases arising from the magnitudes of theparameters k, m and M relative to each other. In each case, we also need to considerwhether m, M ≤ k or m, M > k. Finally, M + m < k or m = 0 are other specialcases. Together, all the scenarios result in a function of the form expressed in Fig.4. Due to the absence of the conditional, the number of cases to be considered issignificantly reduced. Note that were the conditional present, each branch of thetree in Fig. 4 would result in many more branches. Due to our assumption aboutthe independence of events in Eqn. (3), we are able to prune the tree much earlier.
Figs. 5—11 illustrate each of the Pi in Fig. 4. Using these figures, we calculate theprobability contained in the shaded region for each Pi. Integrating piecewise withinthe limits assigned to the shaded region in each figure, we obtain the followingexpressions for each of the Pi in Fig. 4:
P1 =k(k3 − 4m3 − 4mk2 + 12Mm2)
6m2M2(9)
P2 =(12Mk −m2 − 6k2)
6M2(10)
5
Fig. 3. Computing the probability of | Z1 −Z2 |≤ k (left). Joint density of Z1 and Z2 (inµs) with M = 10 and m = 5 (right).
m = 0
M < k
M + m ≤ k
m < km < k
M > k
k > 0, M > 0
M −m < k
true
false true
falsetrue
true
true false
false
true
true false
false
false
true false
P7 P6 P6 P6P4P5 P3P2 P1
Fig. 4. P (|Z1 − Z2| ≤ k).
k
k Mm
M
m
M + m
m + k
m + k
m− k
M + k
M − k
M + k
m− k
M − k
M + m
Z 1− Z 2
=−k
Z 1− Z 2
=k
M + m− k
M + m− k
R1
R3
R5
R6
R4
R7
R8
R9R12
R2
R10
R11
R13
Z1
Z2
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Fig. 5. P1: m ≥ k, M > m and M −m ≥ k.
6
Fig. 4. P(| Z1−Z2 |≤ k).
Figures 5, 6, 7, 8, 9, 10, 11 illustrate each of the Pi in Fig. 4. Using these figures, wecalculate the probability contained in the shaded region for each Pi. Integrating piecewisewithin the limits assigned to the shaded region in each figure, we obtain the following
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 5

expressions for each of the Pi in Fig. 4:
P1 =k(k3−4m3−4mk2 +12Mm2
)6m2M2 , (9)
P2 =
(12Mk−m2−6k2
)6M2 , (10)
P3 =(
12Mkm2 +12mkM2−12mk2M +6m2M2 +m4 +3k4−4km3
12m2M2
+6k2m2−4mk3−4kM3 +6k2M2−4Mk3 +M4
12m2M2 − 4mM3 +4Mm3
12m2M2
),
(11)
P4 =(
6m2M2−4mM3 +12mM2k−12mMk2 +4mk3−m4
12m2M2
+12Mkm2−4M3k +6M2k2−4Mk3 +4km3−4Mm3
12m2M2 +k4 +M4−6k2m2
12m2M2
),
(12)
P5 =(
12km2M +12kmM2−12k2mM +6m2M2− k4−4m3M−4mM3
12m2M2
+4mk3 +4Mk3−M4−m4 +4km3 +4kM3−6k2m2−6k2M2
12m2M2
),
(13)
P6 = 1, (14)
If m = 0, then Y ∈ Uniform [0,0] and hence Z = X . Therefore, fZ = fX , and
P7 =k (2M− k)
M2 . (15)
Figure 12 shows the probability of collision for two nodes participating in the IEEEEPON registration scheme with a total message length of 316 bytes (64 byte actual messagewith additional overhead [6]) as specified in the IEEE EPON standard (equivalent to k =2.528 µs). Although the value for the parameter p is also specified in the standard as 100 µs(equivalent to 20 km), the range of values for p in the figure allows us to use the same modelto compute the probabilities for clustered nodes or nodes situated at an identical distance.The range of values for the wait period w is unspecified by the standard and is open tovarious implementation schemes.
We now extend our two-node model to n nodes. Let Ps (k) and Pc (k) denote the proba-bility of successful and unsuccessful transmission (i.e., collision), respectively, for a nodein the presence of k−1 other nodes. The probability of successful transmission in the two-node case is thus Ps (2) = 1−Pc (2). We already derived Pc (2) earlier in this section, sincePc (2) = P(| Z1−Z2 |≤ k), which is available from Fig. 4 and Eqs. (9)–(15). A successfultransmission by a node in the presence of n−1 other nodes implies that its transmission didnot collide with any of the other n−1 nodes. If we assume independence of each pairwisecollision event of Eq. (8), we can write
Ps (n) = Ps(2)n−1. (16)
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 6

m = 0
M < k
M + m ≤ k
m < km < k
M > k
k > 0, M > 0
M −m < k
true
false true
falsetrue
true
true false
false
true
true false
false
false
true false
P7 P6 P6 P6P4P5 P3P2 P1
Fig. 4. P (|Z1 − Z2| ≤ k).
k
k Mm
M
m
M + m
m + k
m + k
m− k
M + k
M − k
M + k
m− k
M − k
M + m
Z 1− Z 2
=−k
Z 1− Z 2
=k
M + m− k
M + m− k
R1
R3
R5
R6
R4
R7
R8
R9R12
R2
R10
R11
R13
Z1
Z2
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Fig. 5. P1: m ≥ k, M > m and M −m ≥ k.
6
Fig. 5. P1 : m ≥ k,M > m and M−m ≥ k.
m Mk
k
m
M
M + m
m + k
M + m− k
M + m− k
Z 1− Z 2
=k
Z 1− Z 2
=−k
m + k
R1
R2
R3
R4
R5
R6
R7
R8
R9
Z1
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z2
M − k
M − k
M + m
Fig. 6. P2: m < k, M > m and M −m ≥ k.
k
k
m
m
M
M
M + m
M + m
m− k
M − k
m + k
M + m− k
M + m− k
Z1
Z2
R1
R2
R3
R4
R5
R7
R9
R10
R12
M + k
m− k
R11
R13
M + k
8
6M − km + k
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z 1− Z 2
=−k
Z 1− Z 2
=k
Fig. 7. P3: m ≥ k, M ≥ m and M −m < k.
7
Fig. 6. P2 : m < k,M > m and M−m ≥ k.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 7

m Mk
k
m
M
M + m
m + k
M + m− k
M + m− k
Z 1− Z 2
=k
Z 1− Z 2
=−k
m + k
R1
R2
R3
R4
R5
R6
R7
R8
R9
Z1
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z2
M − k
M − k
M + m
Fig. 6. P2: m < k, M > m and M −m ≥ k.
k
k
m
m
M
M
M + m
M + m
m− k
M − k
m + k
M + m− k
M + m− k
Z1
Z2
R1
R2
R3
R4
R5
R7
R9
R10
R12
M + k
m− k
R11
R13
M + k
8
6M − km + k
f1(z1) f2(z1) f3(z1)
f1(z2)
f2(z2)
f3(z2)
Z 1− Z 2
=−k
Z 1− Z 2
=k
Fig. 7. P3: m ≥ k, M ≥ m and M −m < k.
7
Fig. 7. P3 : m ≥ k,M ≥ m and M−m < k.
m
m
k
M
M
k
M − k
M − k
m + k
m + k
M + m− k
M + m− k
M + mZ1
Z2
Z 1− Z 2
=−k
Z 1− Z 2
=k
f3(z1)f2(z1)f1(z1)
f1(z2)
f2(z2)
f3(z2)R2
R4
R6
R8
R9
R5
R7
R1
R3
M + m
Fig. 8. P4: m < k, M > m, M ≥ k and M −m < k.
P3 =
(12Mkm2 + 12mkM2 − 12mk2M + 6m2M2 + m4 + 3k4 − 4km3
12m2M2
+6k2m2 − 4mk3 − 4kM3 + 6k2M2 − 4Mk3 + M4
12m2M2
−4mM3 + 4Mm3
12m2M2
)
(11)
P4 =
(6m2M2 − 4mM3 + 12mM2k − 12mMk2 + 4mk3 −m4
12m2M2
+12Mkm2 − 4M3k + 6M2k2 − 4Mk3 + 4km3 − 4Mm3
12m2M2
+k4 + M4 − 6k2m2
12m2M2
)
(12)
P5 =
(12km2M + 12kmM2 − 12k2mM + 6m2M2 − k4 − 4m3M − 4mM3
12m2M2
+4mk3 + 4Mk3 −M4 −m4 + 4km3 + 4kM3 − 6k2m2 − 6k2M2
12m2M2
)
(13)
P6 = 1 (14)
If m = 0, then Y ∈ Uniform[0, 0] and hence Z = X . Therefore, fZ = fX , and:
8
Fig. 8. P4 : m < k, M > m, M ≥ k, and M−m < k.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 8

m
m
M
M
M + mZ1
Z2
f3(z1)f2(z1)f1(z1)
f1(z2)
f2(z2)
f3(z2)
R2
M + mM + m− k
M + m− k
k
kZ 1− Z 2
=−k
Z 1− Z 2
=k
R3
R1
Fig. 9. P5: m < k, M ≥ m, M < k and M −m < k, M + m > k.
k
kZ 1− Z 2
=−k
Z 1− Z 2
=k
Z2
Z1
M M + m
M
M + m
f3(z2)
f2(z2)
f1(z2)
f1(z1) f2(z1) f3(z1)
m
m
Fig. 10. P6: m < k, M ≥ m, M < k and M −m < k, M + m ≤ k.
9
Fig. 9. P5 : m < k, M ≥ m, M < k, M−m < k, and M +m > k.
m
m
M
M
M + mZ1
Z2
f3(z1)f2(z1)f1(z1)
f1(z2)
f2(z2)
f3(z2)
R2
M + mM + m− k
M + m− k
k
kZ 1− Z 2
=−k
Z 1− Z 2
=k
R3
R1
Fig. 9. P5: m < k, M ≥ m, M < k and M −m < k, M + m > k.
k
kZ 1− Z 2
=−k
Z 1− Z 2
=k
Z2
Z1
M M + m
M
M + m
f3(z2)
f2(z2)
f1(z2)
f1(z1) f2(z1) f3(z1)
m
m
Fig. 10. P6: m < k, M ≥ m, M < k and M −m < k, M + m ≤ k.
9
Fig. 10. P6 : m < k, M ≥ m, M < k, M−m < k, and M +m ≤ k.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 9

MZ1
Z2
R2
M + mM − k
k
kZ 1− Z 2
=−k
Z 1− Z 2
=k
R3
R1
mm
M
M + m
M + m− k
fX(z1)
fX(z2)
M − kM + m− k
Fig. 11. P7: m = 0, M > k.
P7 =k(2M − k)
M2. (15)
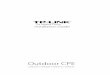
Fig. 12 shows the probability of collision for two nodes participating in the IEEEEPON registration scheme with a total message length of 316 bytes (64-byte actualmessage with additional overhead [6]) as specified in the IEEE EPON standard(equivalent to k = 2.528 μs). While the value for the parameter p is also specified inthe standard as 100 μs (equivalent to 20 km), the range of values for p in the figureallows us to use the same model to compute the probabilities for clustered nodes ornodes situated at an identical distance. The range of values for the wait period wis unspecified by the standard and is open to various implementation schemes.
We now extend our 2-node model to n nodes. Let Ps(k) and Pc(k) denote theprobability of successful and unsuccessful transmission (i.e. collision) respectivelyfor a node in presence of k−1 other nodes. The probability of successful transmissionin the 2-node case is thus Ps(2) = 1 − Pc(2). In Sec. (4), we derived Pc(2) sincePc(2) = P (|Z1 − Z2| ≤ k). A successful transmission by a node in the presence ofn− 1 other nodes implies that its transmission did not collide with any of the othern− 1 nodes. If we assume independence of each pairwise collision event of Eqn. (8),we can write:
Ps(n) = Ps(2)n−1. (16)
This key assumption allows us to sidestep calculation of Eqn. (8) over the manysubintervals. Our calculations are now restricted only to the different cases intro-duced by the parameters k, m and M . Fig. 13 (left) shows the probability of success-ful transmissions for 1 to 200 nodes for a range of waiting times. The propagationtime p is set to 100 μs (20 km). We can also formulate the scenario where all thenodes are at an identical distance by setting p = 0. Fig. 13 (right) shows the perfor-mance of the scheme for 1 to 200 nodes located at identical distances. Figs. 14 and15 compare the results from simulation plotted with those from our closed-formexpression. Our model matches the simulation precisely except for a small range
10
Fig. 11. P7 : m = 0 and M > k.
400
300
200 p0
0
100
0.2
100200
0.4
300
0.6
w 0400
0.8
1
Fig. 12. Probability of collision with two randomly distanced nodes (p, w in µs).
20015000
0.2
0.4
0.6
0.8
100
1
100 n
w
200 50300 4000
20000
0.2
0.4
150
0.6
100
0.8
1
100200 n
w 50300
4000
Fig. 13. Probability of successful transmission with n randomly distanced (left)and n identically distanced (right) nodes. (w is in µs.)
11
Fig. 12. Probability of collision with two randomly distanced nodes (p, w in µs).
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 10

This key assumption allows us to sidestep calculation of Eq. (8) over the many subintervals.Our calculations are now restricted to only the different cases introduced by the parametersk, m, and M. Figure 13 (left) shows the probability of successful transmissions for 1 to200 nodes for a range of waiting times. The propagation time p is set to 100 µs(20 km).We can also formulate the situation where all the nodes are at an identical distance bysetting p = 0. Figure 13 (right) shows the performance of the scheme for 1 to 200 nodeslocated at identical distances. Figures 14 and 15 compare the results from simulation plottedwith those from our closed-form expression. Our model matches the simulation preciselyexcept for a small range of window sizes in the uniformly random case when the number ofdevices is large. This error results from our assumption of the independence of two or morecollision events. Our simulations show that the error introduced is negligible and is presentfor only a small range of window sizes. For window sizes larger than those appearing inFig. 15, we have verified that the error diminishes rapidly.
400
300
200 p0
0
100
0.2
100200
0.4
300
0.6
w 0400
0.8
1
Fig. 12. Probability of collision with two randomly distanced nodes (p, w in µs).
20015000
0.2
0.4
0.6
0.8
100
1
100 n
w
200 50300 4000
20000
0.2
0.4
150
0.6
100
0.8
1
100200 n
w 50300
4000
Fig. 13. Probability of successful transmission with n randomly distanced (left)and n identically distanced (right) nodes. (w is in µs.)
11
Fig. 13. Probability of successful transmission with n randomly distanced (left) and nidentically distanced (right) nodes. (w is in µs.)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 300 350 400
Pro
babi
lity
of s
ucce
sses
in fi
rst a
ttem
pt (
99%
con
fiden
ce)
Window size (micro sec)
No. nodes248
163565
100Closed-form
Fig. 14. Comparison of the probability of success for n identically distanced nodesobtained from simulation and closed-form expression. Thick and thin lines showthe value from the closed-form expression and simulation respectively in eachcurve. Vertical lines show 99% confidence intervals.
of window sizes in the uniformly random case when the number of devices is verylarge. This error results from our assumption that the independence of two or morecollision events. Our simulations show that the error introduced is negligible and ispresent only for a small range of window sizes. For window sizes larger than thoseappearing in Fig. 15, we have verified that the error diminishes rapidly.
5. Efficiency of the contention window
In the IEEE EPON registration scheme, the headend must reserve the communica-tion link every time it needs to allow new nodes to register. Thus, a valuable portionof the available bandwidth is used at every such discovery cycle. The headend mustreserve the channel for a duration of 2pmax + w where pmax = 100 μs (20 km)as specified by the IEEE standard. It is desirable to minimize this duration whenthe channel is exclusively used for discovering new devices—regular traffic cannotbe transmitted. To take this criterion into account, we can define a measure for theefficiency of a particular contention window size as the ratio of the average numberof successful registrations to the size of the duration of the reservation [6]. Thus,efficiency
ρ =n · Ps(n)
2pmax + w. (17)
We use our n-node model to relate efficiency to window size and node number. Fig.16 shows the variation of efficiency with the window size and node number for theidentically distanced (left) and the uniformly randomly distanced (right) cases. Forthe identically distanced case, Table 1 shows the most efficient window size for a
12
Fig. 14. Comparison of the probability of success for n identically distanced nodes obtainedfrom simulation and closed-form expression. Thick and thin curves show the value fromthe closed-form expression and simulation, respectively, in each curve. Vertical lines show99% confidence intervals.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 11

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 50 100 150 200 250 300 350 400
Pro
babi
lity
of s
ucce
sses
in fi
rst a
ttem
pt (
99%
con
fiden
ce)
Window size (micro sec)
No. nodes28
1630506590
100Closed-form
Fig. 15. Comparison of Probability of Success for n uniformly randomly distancednodes obtained from simulation and closed-form expression. Thick and thin linesshow the value from the closed-form expression and simulation respectively ineach curve. Vertical lines show 99% confidence intervals.
given number of nodes, i.e., the smallest window size that maximizes the successprobability. Due to the shape of the surface in Fig. 16 (right) equivalent maximacannot be obtained for the uniformly random case. However, Fig. 17 shows the mostefficient number of nodes that can be serviced by a contention window of a givensize.
6. Summary and Future Work
We derived the probability of message collision in the 802.3ah EPON registrationscheme. We derived an approximating closed-form expression for the probabilityof message collision in the 802.3ah EPON registration scheme. We compared theprobability computed by the expression with simulation results and obtained areasonably precise match. Further, we used our model to compute the most efficientcontention window sizes for identically and randomly distributed nodes.
We are currently working on an exact solution of Eqn. (8). Approximate collisionprobabilities for smaller clusters of nodes and other distributions of nodes can becomputed using the current model by setting the appropriate value for parameterp. However, multiple clusters cannot be modeled with the current setup. Now thatthe average number of successful registrations is known, the model can be extendedto evaluate the multi-step performance of the registration scheme. Specifically, wecan now model our scheme proposed in [5] and evaluate its efficacy.
13
Fig. 15. Comparison of probability of success for n uniformly randomly distanced nodesobtained from simulation and closed-form expression. Thick and thin curves show the valuefrom the closed-form expression and simulation, respectively, in each curve. Vertical linesshow 99% confidence intervals.
5. Efficiency of the Contention Window
In the IEEE EPON registration scheme, the head end must reserve the communicationlink every time it needs to allow new nodes to register. Thus, a valuable portion of theavailable bandwidth is used at every such discovery cycle. The head end must reserve thechannel for a duration of 2p + w (as is clear from Fig. 1), where p = 100 µs (20 km) asspecified by the IEEE standard. It is desirable to minimize this duration when the channelis exclusively used for discovering new devices—regular traffic cannot be transmitted. Totake this criterion into account, we can define a measure for the efficiency of a particularcontention window size as the ratio of the average number of successful registrations to thesize of the duration of the reservation [6]. Thus, the efficiency is
ρ =nPs (n)
2pmax +w. (17)
We use our n-node model to relate efficiency to window size and node number. Figure 16shows the variation of efficiency with the window size and node number for the identicallydistanced (left) and the uniformly randomly distanced (right) cases. For the identically dis-tanced case, Table 1 shows the most efficient window size for a given number of nodes, i.e.,the smallest window size that maximizes the success probability. Due to the shape of thesurface in Fig. 16 (right) equivalent maxima cannot be obtained for the uniformly randomcase. However, Fig. 17 shows the most efficient number of nodes that can be serviced by acontention window of a given size.
6. Summary and Future Work
We derived the probability of message collision in the 802.3ah EPON registration scheme.We derived an approximating closed-form expression for the probability of message col-lision in the 802.3ah EPON registration scheme. We compared the probability computedby the expression with simulation results and obtained a reasonably precise match. Further,
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 12

4003000
200
0.01
150
0.02
200
0.03
w100
0.04
100n 50
00
400300
200
0.01
0.02
0.03
150200
0.04
w
0.05
0.06
100
0.07
100n 50
00
Fig. 16. Contention window efficiency for n identically distanced (left) and ran-domly distanced (right) nodes.(w is in µs.)
Table 1. The most efficient contention window size for identically distancednodes.
No. devices Most efficient(p = 0) window size (μs)
2 35.824 64.638 105.20
10 122.3916 168.4332 273.7750 380.4964 459.65
100 655.74200 1179.31
Acknowledgments
This project was supported in part by grants from the Cisco Systems University Re-search Program. We sincerely thank Glen Kramer for providing valuable feedback.We also thank the reviewers for their valuable comments. A preliminary version ofthis paper without Sec. (3) will appear in the proceedings of the IEEE GLOBECOM2005 conference [8].
References and Links
[1] Data-Over-Cable Service Interface Specifications-Radio Frequency InterfaceSpecification, Cable Television Laboratories, Inc. Standard, Rev. SP-RFI v1.1-I06-001215, Version 1.1, 2000.
[2] IEEE Draft P802.3ah (tm), IEEE Standard, 2004.
[3] S. Tasaka, Performance Analysis of Multiple Access Protocols. MIT Press,Computer Systems Series, 1986.
14
Fig. 16. Contention window efficiency for n identically distanced (left) and randomly dis-tanced (right) nodes. (w is in µs.)
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200 1400 1600
Num
ber
of n
odes
Window size (micro seconds)
uniformidentical
Fig. 17. Number of nodes served by a window size with maximum efficiency.
[4] D. Bertsekas and R. Gallager, Data Networks, 2nd ed. Prentice Hall, 1992,ch. 4.
[5] S. Bhatia and R. Bartos, “Performance of the IEEE 802.3 EPON RegistrationScheme Under High Load,” in Proc. of the SPIE Optics East Conference on Per-formance, Quality of Service and Control of Next-Generation CommunicationNetworks II, Philadelphia, USA, Oct. 2004.
[6] G. Kramer, Ethernet Passive Optical Networks. McGraw-Hill Professional,March, 2005.
[7] A. Papoulis and S. U. Pillai, Probability, Random Variables and StochasticProcesses, 4th ed. McGraw Hill, 2002, ch. 5, 6, 7.
[8] S. Bhatia and R. Bartos, “Closed-form Expression for the Collision Probabilityin the IEEE EPON Registration Scheme,” in IEEE Global TelecommunicationsConference (GLOBECOM 2005), St. Louis, MO, USA, Nov. 2005.
15
Fig. 17. Number of nodes served by a window size with maximum efficiency.
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 13

Table 1. Most Efficient Contention Window Size For Identically Distanced NodesNumber of Devices (p = 0) Most EfficientWindow Size (µs)
2 35.824 64.638 105.20
10 122.3916 168.4332 273.7750 380.4964 459.65100 655.74200 1179.31
we used our model to compute the most efficient contention window sizes for identicallyand randomly distributed nodes.
We are currently working on an exact solution of Eq. (8). Approximate collision proba-bilities for smaller clusters of nodes and other distributions of nodes can be computed usingthe current model by setting the appropriate value for parameter p. However, multiple clus-ters cannot be modeled with the current setup. Now that the average number of successfulregistrations is known, the model can be extended to evaluate the multistep performance ofthe registration scheme. Specifically, we can now model our scheme proposed in Ref. [5]and evaluate its efficacy.
Acknowledgments
This project was supported in part by grants from the Cisco Systems University ResearchProgram. We sincerely thank Glen Kramer for providing valuable feedback. We also thankthe reviewers for their valuable comments. A preliminary version of this paper withoutSection 3 appeared in the proceedings of the 2005 IEEE Global Telecommunications Con-ference [8].
References and Links[1] Data-Over-Cable Service Interface Specifications-Radio Frequency Interface Specification, Ca-
ble Television Laboratories, Inc. Standard, Rev. SP-RFI v1.1-I06-001215, Version 1.1, 2000.[2] IEEE Draft P802.3ah (tm), IEEE Standard, 2004.[3] S. Tasaka, Performance Analysis of Multiple Access Protocols Computer Systems Series, (MIT
Press, 1986).[4] D. Bertsekas and R. Gallager, Data Networks, 2nd ed. (Prentice Hall, 1992), Chap. 4.[5] S. Bhatia and R. Bartoš, “Performance of the IEEE 802.3 EPON registration scheme under
high load,” in Performance, Quality of Service, and Control of Next-Generation CommunicationNetworks II, Proc. SPIE 5598, 112–122 (2004).
[6] G. Kramer, Ethernet Passive Optical Networks (McGraw-Hill, 2005).[7] A. Papoulis and S. U. Pillai, Probability, Random Variables and Stochastic Processes, 4th ed.
(McGraw Hill, 2002), Chaps. 5–7.[8] S. Bhatia and R. Bartoš, “Closed-form expression for the collision probability in the IEEE
EPON registration scheme,” in Proceedings of the IEEE Global Telecommunications Confer-ence (GLOBECOM 2005) (IEEE, 2005).
© 2005 Optical Society of AmericaJON 8673 January 2006 / Vol. 5, No. 1 / JOURNAL OF OPTICAL NETWORKING 14