-
7/29/2019 cilindros_laminacion2.pdf
1/6
Journal of Materials Processing Technology 162163 (2005)
585590
Adaptive calculation of deformation resistance model of
onlineprocess control in tandem cold mill
J.S. Wang a, , Z.Y. Jiang a, A.K. Tieu a, X.H. Liu b, G.D. Wang
ba Faculty of Engineering, University of Wollongong, NSW 2522,
Australia
b The State Key Laboratory of Rolling and Automation,
NortheasternUniversity, Shenyang 110004, PR China
Abstract
The strip deformation resistance is an important factor for
tandem cold mill control. The experiment data of strip yield stress
measured in
the laboratory cannot satisfy the requirement of accuracy for
tandem cold mill online control. In this paper, an adaptive
calculation method forimproving accuracy of strip deformation
resistance model is built up. Using measured rolling force of
online control, the inverse calculation
method of deformation resistance is conducted for tandem cold
mill control. The adaptive learning coefficients of deformation
resistance
model can be determined with exponential smoothing. The
deformation resistance model and Bland-Ford-Hill rolling force
formula are used
for the calculation. The influences of plastic deformation zone,
entry and exit elastic deformation zones in the roll bite on metal
deformation
resistance are considered in the models. The practical
application verifies that the accuracy and stability of calculated
results can satisfy well
the need of online process control of tandem cold mill.
2005 Elsevier B.V. All rights reserved.
Keywords: Deformation resistance model; Adaptive learning;
Tandem cold mill; Inverse calculation; Rolling force
1. Introduction
Tandem cold rolling is that a coil is rolled continuously
be-
low the recrystallization temperature of metal strip on
several
stands mill [1,2]. Deformation resistance is the important
ma-
terial and control parameters for tandem cold strip rolling.
It
is also a basic factor for rolling force calculation. Rolled
strip
thickness accuracy is affected by strip deformation
resistance
calculationbecause of the influence of deformation
resistance
on the calculation model accuracy of rolling force [39]. The
steel strip deformation resistance is expressed by yield
stress
which can be measured through compression-testing in labo-
ratory. Theflow stressmodelfor metal is obtained by themea-sured
data. But, themetalflow stressmodelcannot be used for
online control of tandem cold mill directly because thedata
of
flow stress is obtained in the condition of simple stress.
How-
ever, three-dimensional plastic deformation of metal hap-
pens in the condition of complicated stresses for practical
Corresponding author. Tel.: 61 2 42214809; fax: +61 2
42213101.E-mail address: [email protected] (J.S. Wang).
cold rolling. Therefore, the model of deformation
resistance,
which can represent metal feature of three-dimensional plas-
tic deformation correctly, should be used for online control
in order to improve the accuracy of rolling force.
Many factors affect metal deformation resistance, such as
friction, lubrication and so on [1012]. However, the correct
description of the model for material properties is
difficult
because the control model by itself cannot include all these
factors. In this paper, adaptive learning calculation is
adopted
for improving the model calculation accuracy of strip de-
formation resistance using online measured rolling force for
practical tandem cold mill.
2. Mathematical models of process control
2.1. Configuration for deformation zone
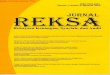
There are plastic deformation zone, elastic compression
zone at the entry of deformation zone and elastic recovery
zone at the exit of deformation zone in the roll bite, as
showed
in Fig. 1.
0924-0136/$ see front matter 2005 Elsevier B.V. All rights
reserved.
doi:10.1016/j.jmatprotec.2005.02.126
-
7/29/2019 cilindros_laminacion2.pdf
2/6
586 J.S. Wang et al. / Journal of Materials Processing
Technology 162163 (2005) 585590
Fig. 1. Deformation zones of cold rolled strip.
where Feinis the deformation rolling force at the elastic
entry zone, Fp is the rolling force of the plastic
deformation
zone, Feout is the rolling force at elastic exit zone, hin is
the
entry strip thickness, hPin is the entry strip thickness in
plastic
deformation zone, hout is the exit strip thickness, hPout is
the
exitstrip thickness at plastic deformation zone, kin is the
entry
strip deformation resistance, km is the average deformation
resistance, kout is the exit strip deformation resistance, inis
the back tension, out is the front tension, Sin is the entry
elastic deformation zone, Sp is the plastic deformation
zone,
Sout is the exit elastic deformation zone.
2.2. Deformation resistance model
Considering elastic deformation of the entry and exit of
roll, the strip entry deformation resistance Eq. (1), exit
defor-
mation resistance Eq. (2) and average deformation resistance
Eq. (3) are obtained according to the different deformation
zones between the roll and strip [13]. Two adaptive learning
coefficients Ck0 and Cn are employed for the modification
of the influence of material properties and reduction on av-
erage deformation resistance. The adaptive learning includes
additive term and exponential term modifications according
to Ck0 and Cn, respectively.
kin =2
3Ck0 k0
2
3ln
100
100 rtin+ 0
cnn(1)
where rtin =h0 hin
h0 100
kout =2
3Ck0 k0
2
3ln
100
100 rtout+ 0
cnn(2)
where rtout = h0houth0 100
km =2
3Ck0 k0
2
3ln
100
100 rtm+ 0
cnn(3)
where rtm =
h0 hmh0
100, hm =
(1
)hin +
hout
.
In the above models, kin is the entry strip deformation
resis-
tance, kout the exit strip deformation resistance, km the
strip
average deformation resistance, h0 the original strip thick-
ness, hm the average thickness in deformation zone, hin the
entry strip thickness, hout the exit strip thickness, rtin the
en-
try zone strip reduction, rtout the exit strip reduction, rtm
the
average total reduction, the thickness influence
coefficient,
k0, 0, n, are model coefficients.
2.3. Rolling force and roll flatten models
Bland-Ford-Hill model equation (4) is used to calculatethe
rolling force in tandem cold rolling [14]. The total rolling
force includes rolling forces of plastic deformation zone,
en-
try and exitelastic deformation zones.Total rolling force
[14]:
F = Fp + Fe (4)Rolling force in plastic deformation zone:
Fp = QF(km )b
R(hin hout) (5)
where = in + out
QF = 1.08 1.02r + 1.79r1 r
Rhout
(6)
Rolling force in elastic deformation zone:
Fe = Fein + Feout
= 23
1 2
Ekm
hout
hin hout(km )b
R (hin hout)
(7)
where Fp is the rolling force of plastic deformation zone,
Fein the rolling force of elastic entry deformation zone,
Feout
rolling force of elastic recovery deformation zone, b the
strip
width, in the back tension, out the front tension, the fric-
tion coefficient between the roll and strip, R the flatten
rollradius, QF the influence coefficient of friction, r the
reduc-
tion at each pass, the Poisson ratio, Ethe Youngs module,
the influence coefficient of back tension, the influence
coefficient of front tension.
Strip deformation resistance will increase significantly
due to work-hardening in cold rolling. So, the roll flatten
radius becomes larger and the contact arc between the roll
and strip increases, which affects the rolling force
signifi-
cantly. Therefore, Hitchcock model Eq. (8) is used to calcu-
late roll flatten radius [15]. The coupling calculation
between
-
7/29/2019 cilindros_laminacion2.pdf
3/6
J.S. Wang et al. / Journal of Materials Processing Technology
162163 (2 005) 58559 0 587
the rolling force and roll flatten radius can be carried out
by
iterative or explicit computation [16].
Roll flatten radius model [15]:
R = R
1 + CRFheq
(8)
where CR =16(1 2)
E
equivalent reduction:
heq = (
heout +
hp +
hein)2
(9)
heout =
1 2
Ehout(kout out)
hp+hein = hin hout + 1
2
E hout(kout tout)where R is the roll flatten radius, R the
original roll radius,and Fthe rolling force.
3. Adaptive learning of deformation resistance model
3.1. Computation method
The function of adaptive learning of strip deformation
resistance model can improve the model calculation accu-
racy through learning coefficient, which describes the dif-
ference between the calculated results and measured values.
The learning coefficient of preceding coil rolling is
adopted
for model setup calculation of next same specification coil
rolling as shown in Fig. 2. The feature of adaptive learning
is completed by level-1 basic automatic control and level-2
process control together.
Using measured rolling force the deformation resistance
of cold rolled strip can be calculated through rolling force
model because it is impossible to measure the strip defor-
mation resistance online by sensors. The method that the
Fig. 2. The types of data sampling and adaptive learning.
deformation resistance is calculated by rolling force model
employing measured values indirectly is called inverse cal-
culation. Though the deformation resistance is not measured,
the inverse calculated value is considered as true value.
3.2. Deformation resistance inverse calculation
The measured rolling force and other parameters are used
for rolling force model Eq. (4) and set X =
kmiback, Eq.
(10) can be obtained:
2
3bmea
Rmdlhimea
1 2
E
hmeai
hmeaiX3
+ bmea
Rimdl
hmeai QFiX2 2
3{imeai imeai1 }
bmeaRmdli h
meai
1 2
E
hmeai
himea X
+{iimea imeai1 }bmea
Rimdl
hmeai QFiFmeai = 0(10)
where
QFi = 1.08 1.02rmeai + 1.79rmeai
1 rmeai mdli
Rmdlihmeai
(11)
where hmeai = hmeai1 hmeai , rmeai =hmeai1hmeai
hmeai1. Here kbackmi
is the inverse calculation value of deformation resistance,
Fmeai the measured rolling force, h
meai the measured strip
thickness, meai the measured tension, bmea the measured
strip
width, mdli the friction modelcalculation value, Rmdli
theroll
flatten model calculation value, i the stand number of
tandem
cold mill.
Fmeai ,hmeai ,
meai and b
meacanbe measured by differentsen-
sors. mdli and Rmdli are obtained by calculation of friction
model and roll flatten model using actual parameters in the
models. Eq. (10) is a higher ordered equation with inverse
calculation value of deformation resistance as independent
variable and it can be solved by Newton-Raphson iterative
calculation.
3.3. Adaptive learning of deformation resistance model
The calculated deformation resistance values are consid-
ered as actual values and used for average deformation
resistance model Eq. (3) after inverse calculation. Eq. (12)
can be obtained after logarithmic transformation for Eq.
(3).
ln(kbackmi ) = ln
23
Ck0 k0
+Cnn ln
23
ln100
100 rtmi+ 0
(12)
-
7/29/2019 cilindros_laminacion2.pdf
4/6
588 J.S. Wang et al. / Journal of Materials Processing
Technology 162163 (2005) 585590
Eq. (12) can be written as a linear equation
Yi = a0 + a1Xi (13)
where Xi = ln
23
ln 100100rtmi + 0
is a known value and
the unknown variable is Yi=
ln(kbackmi ) which includes the
two adaptive learning coefficients of a1 = Cnn and a0 =ln( 2
3Ck0 k0).
Eq. (13) is a linear equation, and the deformation resis-
tance is as an independent variable. The coefficients a0 and
a1 can be calculated by linear regression method using each
stand measured (X1,Y1) (X3,Y3) for five stands tandem coldmill,
and the adaptive learning coefficients Ck0 =
3 ea02k0
and
Cn = a1n can be obtained from a0 and a1.
3.4. Update of adaptive learning coefficient
The new adaptive learning coefficients are obtained by
ex-ponential smoothing calculation using the calculated coeffi-
cientsof thecurrent rolledsteelcoil andpreceding rolledsteel
coil as shown in Eqs. (14) and (15). The criteria check will
be
carried out for the calculation coefficients, as shown in
Eqs.
(16) and (17). The new adaptive learning coefficients will
be
used for online setup calculation of the next coil rolling.
Cnextk0 = (1 Ck0 )Coldk0
+ Ck0 Ccal
k0(14)
Cnextn = (1 Cn )Coldn + Cn Ccaln (15)
Clow
k0 Cnext
k0 Cupper
k0 (16)
Clown Cnextn Cuppern (17)
where Cnextk0 , Cnextn are the learning coefficients for next
coil
model setup calculation, Coldk0
,Coldn the learning coefficients
for preceding coil model setup calculation,Ccalk0
, Ccaln the
learning coefficients for current coil model setup calcula-
tion, Clowk0
, Clown the low limit for learning coefficients,Cupperk0
,
Cuppern the upper limit for learning coefficients and Ck0 ,
Cn the smoothing factors.
4. Practical application
4.1. Working condition
The adatptive learning of deformation resistance model is
applied for online process control of five stands tandem
cold
mill,asshownin Fig.3. The sensors arearrangedin therolling
line. Rolling force, tension, strip speed and strip
thickness
can be measured by load cell, tension meter, velocity meter
and gauge meter, respectively. The technical parameters of
experiments are shown in Table 1.
Fig. 3. 5 Stands tandem cold mill and sensors.
Table 1
Experiment technical parameters of tandem cold mill
Name Parameter
Work roll diameter (mm) 550
Work roll length (mm) 1220
Backup roll diameter (mm) 1320
Backup roll length (mm) 1092
Steel grade of rolled strip SPHC, Stw23
Strip width (mm) 550900
Strip thickness (mm) 1.53.5Reduction (%) 2040
Maximum motor power (kW) 3800
4.2. Data processing
There are two kind adaptive learning modes for strip de-
formation resistance calculation. One is low speed adaptive
learning, the other is high speed adaptive learning. Each
type
learning is related to the necessary rolling speed. A speed
of 400 m/min is defined as the speed border of high speed
adaptive learning and low speed adaptive learning, as shown
in Fig. 4.A point indicates the beginning time for data sampling
of
low speed. The sampling starts when the head of the delivery
strip passes the shear on rolling line. B1 is the beginning
time
for data sampling of high speed. The sampling begins when
the acceleration completes in 5 s. During rolling, sampling
data of the higher speed has the priority for adaptive
learning
calculation. It can be seen that the rolling speed of B2 point
is
higher than that at B1 point. In this case, the adaptive
learning
coefficient calculated by the sampling data of B2 point will
replace the coefficient at B1 point.
The sampling interval is 0.5 s and sampling number is
10 for each sampling both low speed and high speed
datacollection.
Fig. 4. Speed schedule of tandem cold mill.
-
7/29/2019 cilindros_laminacion2.pdf
5/6
J.S. Wang et al. / Journal of Materials Processing Technology
162163 (2005) 585590 589
Fig. 5. Processes of model adaptive learning.
The sampling data must be checked before it is used for
modeladaptive learning. The stability of measured
values,forexample rolling force, tension, roll speed and strip
thickness,
will be identified. The rules to identify the data are shown
in Eqs. (18)(20). For strip thickness, the reference value
of gauge meter measurement should be same as the setup
thickness for stand rolling. The data will be ignored if the
stability of data cannot meet the requirement.
Fimax FiminFisetup
< KiF-limit (18)
Timax TiminT
i
setup
< KiT-limit (19)
VRimax VRimax VRiminVRisetup
< Kiv-limit (20)
whereFimax, Ti
max, VR are the maximum values of 10 sam-
pled data for rolling force, total tension and rolling
speed,
respectively. Fimin, Ti
min, VR are the minimum values of 10
sampled data for rolling force, total tension and rolling
speed,
respectively. Fisetup,Ti
setup, VR are model setup target values
for rolling force, total tension and rolling speed,
respectively.
i is the stand number 15.
The last step for data processing is the average calculation
for the 10 sampled data. The average of all measured values
will be used for model adaptive learning calculation. The
process of model adaptive learning is shown in Fig. 5.
4.3. Results analysis
Comparisons of calculated rolling force with measured
values are shown in Figs. 6 and 7 for without and with
appli-
cation of adaptive learning of deformation resistance model.
The diagonal lines in Figs. 6 and 7 indicate that the
calculated
rolling force is same as the measured values. According to
the analysis of relative error x and mean square deviation
Fig. 6. Comparison of calculated and measured rolling forces
without adap-
tive learning of deformation resistance.
Fig. 7. Comparison of calculated and measured rolling forces
with adaptive
learning of deformation resistance.
of 250 coils cold rolled strip. It can be seen that the
calcula-tion accuracy of rolling force is improved by introducing
the
adaptive learning of the deformation resistance model.
5. Conclusion
A method for improving calculation accuracy of deforma-
tion resistance model is presented. The inverse calculation
of
thedeformation resistance and the adaptive learning model of
tandem cold strip rolling are built based on calculated
rolling
force using the measured rolling force. The difference be-
tween the calculated and actual strip deformation resistancecan
be compensated by the model adaptive learning coeffi-
cients. The accuracy of rolling force calculation can be im-
proved through corrected strip deformation resistance model.
Practical application of online process control of five
stands
tandem cold mill verifies the effectiveness of this method.
Acknowledgement
This work was supported by the Australian Research
Council (ARC).
-
7/29/2019 cilindros_laminacion2.pdf
6/6
590 J.S. Wang et al. / Journal of Materials Processing
Technology 162163 (2005) 585590
References
[1] T.S. Bilkhu, Dynamic control of tension, thickness and
flatness for
a Tandem Cold Mill, AISE Steel Technol. 78 (10) (2001) 49
54.
[2] D.D. Wang, A.K. Tieu, F.G. De Boer, B. Ma, W.Y.D. Yuen,
Toward
a heuristic optimum design of rolling schedules for tandem
cold
rolling mills, Eng. Appl. Artif. Int. 13 (4) (2000) 397406.[3]
Yoshikazu, Modernization of gauge control system at Sumitomo
Wakayama 5-stand cold mill, Iron Steel Eng. 8 (1999) 4650.
[4] K. Tomohiro, Technologies for high speed rolling and gauge
con-
trol in cold tandem mill for ultra-thin gauge strip, Kawasaki
Steel
Technical Report 37 (10) (1997) 2532.
[5] J. Larkiola, P. Myllykoski, J. Nylander, Prediction of
rolling force
in cold rolling by using physical models and neural computing,
J.
Mater. Process. Technol. 60 (6) (1996) 381386.
[6] S.Q. Yu, Y.Q. He, Z. Gu, Harmonious distribution method of
multi-
load, Iron Steel 31 (7) (1996) 4851.
[7] R.N. Venkata, G. Suryanarayana, A set-up model for tandem
cold
rolling mills, J. Mater. Process. Technol. 116 (10) (2001)
269
277.
[8] S. Cho, M. Jang, S. Yoon, A hybrid
neural-network/mathematical
prediction model for tandem cold mill, Comp. Ind. Eng. 33
(12)(1997) 453456.
[9] C. Ozsoy, et al., Optimum scheduling of a hot rolling
process by
nonlinear programming, Can. Metall. Quart. 31 (3) (1992)
217224.
[10] Z.Y. Jiang, H.T. Zhu, A.K. Tieu, Effect of rolling
parameters on cold
rolling of thin strip during work roll edge contact, J. Mater.
Process.
Technol. 140 (2003) 535541.
[11] Z.Y. Jiang, A.K. Tieu, A 3-D finite element method analysis
of cold
rolling of thin strip with friction variation, Tribol. Int. 37
(2) (2004)
185191.
[12] H. Pawelski, Friction inhomogeneities in cold rolling, J.
Mater. Pro-
cess. Technol. 125 (9) (2002) 392397.
[13] J.S. Wang, Principle and Application of Flying Gauge Change
for T-
WRS&C Tandem Cold Mill, Ph.D. Thesis, Northeastern
University,
Shenyang, 2002.
[14] C.C.Y. Lin, M. Atkinson, C.J. Cinkowski, New rolling force
modifi-
cation equation for the bland and ford cold rolling model, in:
Interna-
tional Symposium on Information Storage and Processing
Systems,
American Society of Mechanical Engineers/Manufacturing
Engineer-
ing Division, New York, USA, 1996, pp. 355363.
[15] J. Yang, Rolling Mathmetical Models, Metallurgy Industry
Press,
Beijing, 1993.
[16] J.S. Wang, Z.J. Jiao, C. Lu, X.H. Liu, G.D. Wang, Explicit
express
of rolling force taking elastic deformation into account of
strip, in:
Proceedings of the Fourth International ESAFORM Conference
OnMaterial Forming, Liege, Belgium, 2001.