Embed Size (px)
Citation preview

Chromatic Framework for Vision in Bad Weather
Srinivasa G. Narasimhan and Shree K. NayarDepartmentof ComputerScience,ColumbiaUniversity
New York, New York 10027Email:
srinivas,nayar @cs.columbia.edu
AbstractConventional vision systemsare designedto perform inclear weather. However, any outdoorvision systemis in-completewithout mechanismsthat guaranteesatisfactoryperformanceunder poor weatherconditions. It is knownthat the atmosphere can significantly alter light energyreaching an observer. Therefore, atmosphericscatteringmodelsmustbe usedto make vision systemsrobust in badweather. In this paper, we developa geometricframeworkfor analyzingthe chromaticeffectsof atmosphericscatter-ing. First, we studya simplecolor modelfor atmosphericscatteringand verify it for fog and haze. Then,basedonthephysicsof scattering, wederiveseveral geometriccon-straints on scenecolor changes,causedby varying atmo-sphericconditions.Finally, usingtheseconstraints wede-velop algorithms for computingfog or hazecolor, depthsegmentation,extracting three dimensionalstructure, andrecovering “true” scenecolors, from two or more imagestakenunderdifferentbut unknownweatherconditions.
1 Vision and Bad Weather
Currentvision algorithmsassumethat the radiancefrom ascenepoint reachesthe observer unaltered.However, it iswell known from atmosphericphysicsthat the atmospherescatterslight energyradiatingfromscenepoints.Ultimately,vision systemsmustdealwith realisticatmosphericcondi-tions to be effective outdoors. Several modelsdescribingthevisualmanifestationsof theatmospherecanbefoundinatmosphericoptics(see[Mid52], [McC75]). Thesemodelscanbeexploitedto notonly removebadweathereffects,butalsoto recovervaluablesceneinformation.
Surprisingly, little work hasbeendonein computervisionon weatherrelated issues. Cozmanand Krotkov[CK97]computeddepthcuesfrom iso-intensitypoints. NayarandNarasimhan[NN99] usedwell establishedatmosphericscat-tering models,namely, attenuationand airlight, to extractcompletescenestructurefrom one or two images, irre-
This work was supported in parts by a DARPA/ONR MURI
Grant(N00014-95-1-0601),an NSF National Young InvestigatorAward,andaDavid andLucile PackardFellowship.
spective of sceneradiances.They alsoproposeda dichro-matic atmosphericscatteringmodel that describesthe de-pendenceof atmosphericscatteringon wavelength. How-ever, thealgorithmthey developedto recoverstructureusingthismodel,requiresa cleardayimageof thescene.
In thispaper, wedevelopageneralchromaticframework fortheanalysisof imagestakenunderpoorweatherconditions.Thewidespectrumof atmosphericparticlesmakesageneralstudyof vision in badweatherhard.So,we limit ourselvesto weatherconditionsthatresultfrom fog andhaze.We be-gin by describingthekey mechanismsof scattering.Next,weanalyzethedichromaticmodelproposedin [NN99], andexperimentallyverify it for fog andhaze.Then,we deriveseveralusefulgeometricconstraintsonscenecolor changesdue to differentbut unknownatmosphericconditions. Fi-nally, we developalgorithmsto computefog or hazecolor,to constructdepthmapsof arbitraryscenes,andto recoverscenecolorsasthey wouldappearonaclearday. All of ourmethodsonly requireimagesof the scenetakenundertwoor morepoorweatherconditions,andnota cleardayimageof thescene.
2 Mechanisms of Scattering
Theinteractionsof light with theatmospherecanbebroadlyclassifiedinto threecategories,namely, scattering,absorp-tion and emission. Of these,scatteringdue to suspendedatmosphericparticlesis mostpertinentto us. For a detailedtreatmentof thescatteringpatternsandtheir relationshiptoparticleshapesandsizes,wereferthereaderto theworksof[Mid52] and[Hul57]. Here,wefocusonthetwo fundamen-tal scatteringphenomena,namely, airlight andattenuation,which form thebasisof our framework.
2.1 Airlight
While observinganextensive landscape,we quickly noticethat thescenepointsappearprogressively lighter asour at-tentionshifts from theforegroundtowardthehorizon.Thisphenomenon,known asairlight (see[Kos24]), resultsfromthe scatteringof environmentallight toward the observer,by the atmosphericparticleswithin the observer’s coneofvision.

The radianceof airlight increaseswith pathlength andisgivenby (see[McC75] and[NN99]),
"! $# (1)
% is called the total scatteringcoefficient and it repre-sentstheability of a volumeto scatterflux of a givenwave-length , in all directions.
% & is calledtheopticalthick-nessfor thepathlength . ' is known asthe“horizon”radiance.More precisely, it is the radianceof the airlightfor an infinite pathlength.As expected,the airlight at theobserver( )( ) is zero.
Assuminga camerawith a linear radiometricresponse,theimageirradiancedueto airlight canbewrittenas * +,- . "! / where- accountsfor thecamerapa-rameters.Substituting
* - 0 (2)
weobtain
* +,1* 2 345 67 "! 0# (3)
2.2 Attenuation
As alight beamtravelsfrom ascenepointthroughtheatmo-sphere,it getsattenuateddueto scatteringby atmosphericparticles.Theattenuatedflux thatreachesanobserver froma scenepoint, is termedas direct transmission[McC75].Thedirect transmissionfor collimatedlight beamsis givenby Bouguer’sexponentiallaw[Bou30]:
* - 8+ 67 "! (4)
where * +, is the attenuatedirradianceat the observer,and
'8 is theradianceof thescenepoint prior to atten-uation. Again, - accountsfor the cameraparameters.Al-lard’s law[All76] modifiesthe above model for divergentlight beamsfrom pointsourcesas
* +, -:9 80 7;, <!= (5)
where 9 80 is the radiant intensity of the point source.In the subsequentsections,we usethe terms“attenuationmodel”and“direct transmissionmodel”, interchangeably.
2.3 Overcast Sky Illumination
Allard’sattenuationmodelis in termsof theradiantintensityof a point source. This formulationdoesnot take into ac-countthesky illuminationandits reflectionby scenepoints.We make two simplifying assumptionsregardingthe illu-minationreceivedby a scenepoint. Then,we reformulatethe attenuationmodel in termsof sky illumination andtheBRDFof scenepoints.
Usually, the sky is overcast under foggy conditions.So we use the overcast sky model for environmentalillumination[GC66][MS42]. We alsoassumethat the irra-dianceat eachscenepoint is dominatedby the radianceofthesky, andthat the irradiancedueto otherscenepointsisnot significant. In AppendixA, we have shown that theat-tenuatedirradianceat theobserver is givenby,
* - > 7 "! = # (6)
where is thehorizonradiance.> representsthesky
aperture(theconeof sky visiblefrom ascenepoint),andthereflectanceof thescenepoint in thedirectionof theviewer.From(2), wehave
* +, * > "! = # (7)
Theabove expressionfor thedirect transmissionof a scenepoint includesthe effects of sky illumination and the re-flectanceof thescenepoint. In theremainderof thepaper,we referto (7) asthedirecttransmissionmodel.
3 Dichromatic Model
Hitherto, we have describedattenuationandairlight sepa-rately. At night, therecanbe no airlight (sincethereis noenvironmentalillumination) and hence,attenuationdomi-nates.In contrast,underdensefog or hazeduringdaylight,the radiancefrom a scenepoint is severely attenuatedandhenceairlight dominates.However, in mostsituationstheeffects of both attenuationand airlight coexist. Here, wediscussthechromaticeffectsof atmosphericscatteringthatincludebothattenuationandairlight.
Nayar and Narasimhan[NN99] derived a color model foratmosphericscatteringcalled the dichromaticatmosphericscatteringmodel.It statesthatthecolorof ascenepointun-derbadweatheris a linearcombinationof thedirect trans-missioncolor (asseenon a clearday, whenthereis mini-mal atmosphericscattering),andairlight color (fog or hazecolor).
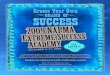
Figure1 illustratesthe dichromaticmodel in R-G-B colorspace.Let ? betheobservedcolor vectorfor a scenepoint@
, on a foggy or hazyday. Let theunit vector AB representthedirectionof direct transmissioncolor of
@. Let theunit
vector AC representthedirectionof airlight color. Then,wecanwrite ?5EDFABHGJI AC (8)
whereD is themagnitudeof directtransmission,andI
is themagnitudeof airlight of
@.
For thevisible light spectrum,therelationshipbetweenthescatteringcoefficient
%, andthe wavelength , is given by

R
GK
BL
OM
DN ∧O
A∧P
E
pQq
Figure 1: Dichromaticatmosphericscatteringmodel. The colorRof a scenepoint on a foggy or hazyday, is a linearcombination
of thedirection ST of directtransmissioncolor, andthedirection SUof airlight color.
Rayleigh’s law: % WV,XZY.[\,]Y\$^ (9)
where_5`ba (3ced . Fortunately, for fog andhaze,_5fE( (see[Mid52], [McC75]). In thesecases,
%doesnot dependon
wavelength.So,we drop theparameter from theairlightmodelin (3) andthedirecttransmissionmodelin (7). Then,we can write the coefficients D and
Iof the dichromatic
modelas,
Dg * > ! = I 1* h5 ! 0# (10)
This implies that the dichromaticmodel is linear in colorspace.In otherwords, AB , AC and ? lie on thesamedichro-maticplanein color space.Furthermore,theunit vectors ABand AC , do not changedueto differentatmosphericcondi-tions.Therefore,thecolorsof ascenepoint
@, observedun-
derdifferentatmosphericconditions,lie on a singledichro-maticplane,asshown in figure2.
D∧
A∧i
Ej
1
E 2k
Ol
Dichromatic Plane
Figure 2: The observed color vectorsRm
of a scenepoint underdifferent(two in thiscase)foggy or hazyconditionslie on a planecalledthedichromaticplane.
Nayar and Narasimhan[NN99] did not extensively verifytheir modelfor real images.Sinceour framework is basedon this model,we experimentallyverified the model in R-G-B color space. Experimentswereperformedusingtwo
noqpsrpError (degrees)tvu/wsw0x (# yez|~x (#
Table 1: Experimentalverificationof thedichromaticmodelwithtwo scenesimagedunder threedifferent foggy and hazy condi-tions, respectively. The error wascomputedasthe meanangulardeviation(in degrees)of theobservedscenecolorvectorsfrom theestimateddichromaticplanes,overall /ss pixelsin theim-ages.
scenes(seefigures6(] ) and ( V )) underthreedifferent fogandhazeconditions.Theimagesusedwereof sizee(e(:(e(pixels. Thedichromaticplanefor eachpixel wascomputedby fitting a planeto thecolorsof thatpixel, observedunderthe threeatmosphericconditions.Theerrorof theplane-fitwascomputedin termsof the anglebetweenthe observedcolor vectorsandtheestimatedplane.Theaverageerror(indegrees)for all thepixelsin eachof thetwo scenesis shownin table1. The small error valuesindicatethat the dichro-maticmodelindeedworkswell for fog andhaze.
4 Computing the Direction of Airlight Color
The directionof airlight (fog or haze)color canbe simplycomputedby averagingapatchof thesky onafoggyor hazyday, or from scenepointswhosedirecttransmissioncolor isblack1. Thesemethodsnecessitateeither
] the inclusionof a partof thesky (which is moreproneto color saturationor clipping) in the imageor
& a clear day imageof thescenewith sufficientblackpointsto yield a robustestimateof thedirectionof airlight color. Here,wepresenta methodthatdoesnot requireeitherthesky or a cleardayimage,tocomputethedirectionof airlight color.
Figure3 illustratesthe dichromaticplanesfor two scenepoints
@and
@ , with differentdirect transmissioncolorsAB and AB . Thedichromaticplanes and aregiven
by theirnormals,
? ? = ? ? = # (11)
Sincethe direction AC of the airlight color is the samefortheentirescene,it mustlie on thedichromaticplanesof allscenepoints. Hence, AC is givenby the intersectionof thetwo planes and ,
AC # (12)
1Sky andblackpointstakeonthecolorof airlight onabadweatherday.

O
E(i)1
E(i)2
E(j)
1
(j)
E
2
D ∧ (i)
D ∧ (j)
A ∧
Plane Q¡
i¢
Plane Q¡
j£
Figure 3: Intersectionof two differentdichromaticplanesyieldsthedirection SU of airlight color.
In practice,sceneshaveseveralpointswith differentcolors.Therefore,we cancomputea robust intersectionof severaldichromaticplanesby minimizingtheobjective function
¤ #¥AC = # (13)
Thus,weareableto computethecolorof fog or hazeusingonly the observedcolorsof the scenepointsundertwo at-mosphericconditions,andnot relyingon a patchof theskybeingvisible in theimage.
We verified theabove methodfor the two scenesshown infigures6(] ) and( V ). First, thedirectionof airlight colorwascomputedusing(13). Then,we comparedit with thedirec-tion of the airlight color obtainedby averagingan unsatu-ratedpatchof the sky. For the two scenes,theangularde-viationswerefoundto be
# y ¦ and # §¦ respectively. These
smallerrorsin thecomputeddirectionsof airlight color in-dicatetherobustnessof themethod.
5 Iso-depth Scene PointsIn thissection,wederiveasimpleconstraintfor scenepointsthatareat thesamedepthfrom theobserver. Thisconstraintcanthenbeusedto segmentthescenebasedondepth,with-out knowing theactualreflectancesof thescenepointsandtheir sky apertures.For this, we first prove the followinglemma.
Lemma 1 Ratiosof thedirecttransmissionmagnitudesforpointsundertwo differentweatherconditionsare equal, ifand only if the scenepoints are at equal depthsfrom theobserver.
Proof: Let% and
% = be two unknown weatherconditionswith horizonbrightnessvalues * ¨ and * ª© . Let
@and@
be two scenepointsat depths and , from the ob-server. Also, let > and > representsky aperturesandreflectancesof thesepoints.
O«
E1
E¬
2
D∧®
A1
2A° A
∧±At²
Q(P)
p³ p³1
2´
qµ1 qµ
2
Figure 4: Theratio ¶$·6¸0¶6¹ of thedirecttransmissionsfor a scenepointundertwo differentatmosphericconditionsis equalto thera-tio º »¼·¾½À¿&º¸º »Á¹¾Âgº of theparallelsides.Shadedtrianglesaresimi-lar.
From (10), thedirect transmissionmagnitudesof@
under% and% = , canbewrittenas
D * ¨ > 6 ¨ !sà = D = * © > 6 © !sà = # (14)
Similarly, the direct transmissionmagnitudesof@
under% and% = , are
D * ¨ > 6 ¨ !,Ä = D = * g© > 6 © !,Ä = # (15)
Then,we immediatelyseethattherelation:
D =D D =D * ©* ¨ ' © 6 ¨ "! (16)
holdsif andonly if W Å . So, if we have the ratioof direct transmissionsfor eachpixel in the image,we cangroupthescenepointsaccordingto theirdepthsfromtheob-server. But how dowecomputethisratiofor any scenepointwithoutknowing theactualdirecttransmissionmagnitudes?
Considerthedichromaticplanegeometryfor a scenepoint@, asshown in figure(4). Here,we denotea vectorby the
line segmentbetweenits endpoints. Let D and D = be theunknown directtransmissionmagnitudesof
@under
% and% = , respectively. Similarly, letI and
I = be the unknownairlight magnitudesfor
@under
% and% = .
We defineanairlight magnitudeÆÈÇÁÉÊqÆ suchthat
* = ÉhÊ * ÇF# (17)

Also, sincethe directionof direct transmissioncolor for ascenepoint doesnot vary dueto differentatmosphericcon-ditions, * É * = É = # Here É and É = correspondto theendpointsof theairlight magnitudesof
@under
% and% = ,
asshown in figure(4). Thus, Ë* ÇÁÉ 4Ì Ë* = É Ê É = # Thisimplies, D =D
I = Æ;ÇÁÉhÊqÆI ÆÈ* = ÉÊqÆÆ;* ÇªÆ # (18)
Sincetheright handsideof (18) canbecomputedusingtheobservedcolorvectorsof thescenepoint
@, wecancompute
the ratio D =Í D of direct transmissionmagnitudesfor
@undertwo atmosphericconditions.Therefore,from (16), wehaveasimplemethodto find pointsat thesamedepth,with-out having to know their reflectancesandsky apertures.Asequentiallabelinglike algorithmcanthenbe usedto effi-cientlysegmentscenesinto regionsof equaldepth.
6 Scene structure
We extendthe direct transmissionratio constraintgiven in(16) onestepfurtherandpresenta methodto constructthecompletestructureof an arbitraryscene,from two imagestakenunderpoorweatherconditions.
From(16), theratio of directtransmissionsof a scenepoint@undertwo atmosphericconditions,is givenby
D =D * ©* ¨ © ¨ "! # (19)
Note that we have alreadycomputedthe left handsideoftheaboveequationusing(18). Takingnaturallogarithmsonbothsides,weget
% = % /ÏÎÑÐ * ©* ¨ ÎÑÐ D =D # (20)
So, if we know the horizon brightnessvalues, * ¨ and* © , thenwecancomputethescaleddepth % = % & at
@.
In fact, % = % & is theDifferencein OpticalThicknesses
(DOT) for the pathlength , underthe two weathercondi-tions. In theatmosphericopticsliterature,thetermDOT isusedasa quantitative measureof the “change”in weatherconditions.
6.1 Estimation of ÒÔÓ ¹ and ÒÓ ·Theexpressionfor scaleddepthgivenin (20), includesthehorizonbrightnessvalues,* ¨ and * g© . Thesetwo termsareobservablesonly if somepartof thesky is visible in theimage. However, the brightnessvalueswithin the regionof the imagecorrespondingto the sky, cannotbe trustedsincethey areproneto intensitysaturationandcolor clip-ping. Here,weestimate* ¨ and * © usingonly pointsinthe“non-sky” regionof thescene.
LetI and
I = denotethemagnitudesof airlight for a scenepoint
@underatmosphericconditions
% and% = . Using
(10), wehave I 1* ¨ h5 ¨ ! 0I = 1* © 45 © ! 0# (21)
Therefore,
* ª© I =* ¨ I * ª©* ¨ © ¨ "! # (22)
Substituting(19), wecanrewrite theaboveequationas
D =D I = VI (23)
where,
V Õ* © D =D * ¨ # (24)
Comparing (23) and (18), we get V ÆÈÇÁÉÊÆ (seefigure(4)). Hence,(24) representsa straightline equationin theunknown parameters,* ¨ and * © .Now considerseveral pairs of Ö V
D = Í D /× corre-
spondingto scenepoints@
, at differentdepths.Then,theestimationof * ¨ and * © is reducedto a line fitting prob-lem. Quitesimply, we have shown that thehorizonbright-nessesunderdifferentweatherconditionscanbecomputedusingonlynon-sky scenepoints.
Sinceboth the termson the right handsideof (20) canbecomputedfor everyscenepoint,wehaveasimplealgorithmfor computingthe scaleddepth at eachscenepoint, andhencethe completescenestructure,from two badweatherimages.
6.2 Experimental Results
We now presentresultsshowing scenestructurerecoveredfrom bothsyntheticandrealimages.Thesyntheticsceneweusedis shown on theleft sideof figure5
] asa y(e(ØØye(e(pixel imagewith 16 color patches.The colors in this im-agerepresentthedirect transmissionor “true” colorsof thescene. We assigneda randomdepthvalue to eachcolorpatch. The rotated D structureof the sceneis shown onthe right sideof figure5
] . Then, two different levels offog (
% # ( ,% = # z ) wereaddedto thesyntheticscene
accordingto thedichromaticmodel.To testrobustness,weaddednoiseto the foggy images.Thenoisewasrandomlyselectedfrom a uniformly distributedcolor cubeof dimen-sion 10. The resultingtwo foggy (and noisy) imagesareshown in figure5
& . Thestructureshown in 5 V is recov-
eredfrom thetwo foggy imagesusingthetechniquewe de-scribedabove.
Simulationswererepeatedfor the scenein figure5 ] for
two relative scatteringcoefficient values(% Í % = ), andfour

( ] )
()
( V )Figure 5: ÙÛÚÜ Ontheleft, a ÝsÝ pixel imagerepresentingasyntheticscenewith 16 color patches,andon theright, its rotatedÞD structure.ÙÛ᝚ Two levelsof fog (à ¹:áâsã , à ·váJâ¥ãåä ) areadded
to thesyntheticimageaccordingto thedichromaticmodel.To testrobustness,noiseis addedby randomselectionfrom a uniformlydistributedcolorcubeof dimensionâ . ÙÛæsÜ Therecoveredstructure(Þ Þ medianfiltered).Refer to [Web00] for version with color
images.
NoiseÛç ( z ( z
Estimated* ¨ (( (#éè (eê6# y ê# (Estimated* © yezz yey#éè yee6# y èc# (DepthError (%) (# ( èë# c e #éè z#
ActualValuesÖ % Í % = ,* ¨ ,* g© ×h1Ö,(# z (e(6yzez6× ] Noise
Ûç ( z ( zEstimated* ¨ ye(( ye(c# yeye6#Ûè yceê# zEstimated* © ce(( ce(# c è# z ccec# yDepthError (%) (# ( y6# z# èë#
ActualValuesÖ % Í % = * ¨ ,* © ×h1Ö,(# §èë3ye((c(e(§×& Table 2: Simulationswererepeatedfor thescenein figure5(Ú ), fortwo setsof parametervalues(shown in (Ú ) and(ß )), andfour dif-ferentnoiselevels.Noisewasrandomlyselectedfrom auniformlydistributedcolor cubeof dimensionì .
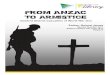
( ] )
()
( V )
( )Figure 6: ÙÛÚÜ A sceneimagedundertwo differentfoggy condi-tions. ÙÛ᝚ Computeddepthmapof thesceneusingthetwo imagesin ÙÛÚÜ . ÙÛæ¥Ü Anothersceneimagedundertwo differenthazycondi-tions. ÙÛí7Ü Computeddepthmapof thesceneusingthetwo imagesin ÙÛæsÜ . See [Web00] for version with color images.
different noise levels. Once again, the noise was ran-domly selectedfrom a uniformly distributedcolor cubeofdimension
ç. Table2
] shows resultsof simulationsforthe parameterset Ö % Í % = ,* ¨ ,* © ×îÖï(6# z6 ((3yezez§×vwhile 2
& shows the resultsfor the set Ö,(# §èye((3ce(e(§×v#The computedvaluesfor * ¨ , * © , and the percentageRMS error in the recoveredscaleddepths,computedoverall ye((5ðy(e( pixels are given. Theseresultsshow thatourmethodfor recoveringstructureis robustfor reasonableamountsof noise.
Experimentswith two realscenesunderfoggyandhazycon-ditionsareshown in figure6. Theseexperimentsarebasedon imagesacquiredusinga Nikon N90sSLR cameraanda Nikon LS-2000slide scanner. All imagesare linearizedusingtheradiometricresponsecurveof theimagingsystem

that is computedoff-line usinga color chart. The first ofthetwo sceneswasimagedundertwo foggyconditions,andis shown in 6
] . Thesecondscenewasimagedundertwohazy conditionsas shown in 6
V . Figures6/ and 6
0show thecorrespondingrecovereddepthmaps.
7 True Scene ColorAs we statedin the beginning of the paper, mostoutdoorvision applicationsperformwell only underclearweather.Any discernibleamountof scatteringdueto fog or hazeinthe atmosphere,hindersa clearview of the scene.In thissection,wecomputethedirecttransmissionor “true” colorsof theentiresceneusingminimala priori sceneinformation.For this, we show that, givenadditionalsceneinformation(airlight or direct transmissionvector)at a singlepoint inthescene,wecancomputethetruecolorsof theentirescenefrom two badweatherimages.
Considerthedichromaticmodelgivenin (8). Theobservedcolorof ascenepoint
@ underweathercondition
%is,
? ñD AB GIe AC (25)
whereD is thedirect transmissionmagnitude,andI
istheairlight magnitudeof
@ . Supposethatthedirection AB
of direct transmissioncolor for a singlepoint@
is given.Besides,thedirection AC of airlight colorfor theentirescenecanbeestimatedusing(13). Therefore,thecoefficientsD and
I canbecomputedusing(25). Furthermore,theopti-
cal thickness% of
@ canbecomputedfrom (10).
Sincewe have alreadyshown how to computethe scaleddepth of every scenepoint (see(20)), the relative depth Í of any otherscenepoint
@ with respectto
@ can
be computedusing the ratio of scaleddepths. Hence,theoptical thicknessandairlight for the scenepoint
@ , under
thesameatmosphericconditionaregivenby% % Í I 1* 345ë6!,Ä 0# (26)
Finally, the direct transmissioncolor vector of@
can becomputedasD AB 1? I AC # Thus,givena sin-gle measurement(in this case,thedirectionof direct trans-missioncolor of a singlescenepoint), we have shown thatthedirecttransmissionandairlightcolorvectorsof any otherpoint,andhencetheentirescenecanbecomputed.But howdo we specifythetruecolor of any scenepoint without ac-tually capturingthecleardayimage?
For this,weassumethatthereexistsatleastonescenepointwhosetruecolor
Blieson thesurfaceof thecolorcubeand
we wish to identify suchpoint(s) in the scene. Considerthe R-G-B color cubein figure(7). If the true color of ascenepoint lies on the surfaceof the color cube,then thecomputedòI is equalto theairlight magnitude
Iof thatpoint.
R
GB q
Dó∧
~qô
O
E∧-A
Figure 7: The observed colorR
of a scenepoint, its airlight di-rection SU andtruecolordirection ST areshown in theR-G-Bcolorcube. õö is thedistancefrom
Rto a surfaceof thecubealongneg-
ative SU . For scenepointswhosetruecolorsdo not lie on thecubesurface, õö is greaterthanthetrueairlight magnitudeö .
Figure 8: True color imagesrecoveredusingthe two foggy andhazyimagesshown in figure6ÙÛÚÜ and ÙÛæ¥Ü respectively. Thecolorsin the dark window interiorsare dominatedby airlight and thustheir truecolorsareblack. The imagesarebrightenedfor displaypurposes.See [Web00] for the version with color images.
However, if the truecolor of thepoint lies within thecolorcube,thenclearly òIÀ÷)I # For eachpoint
@ , wecomputeòI
andoptical thickness% . Notethat
% mayor maynotbe the correctoptical thickness.We normalizethe opticalthicknessesof thescenepointsby theirscaleddepthsto get
ø % % = % & v# (27)
For scenepointsthatdonot lie onthecolorcubesurface, òø is greaterthanwhat it shouldbe. Sincewe have assumedthat thereexistsatleastonescenepoint whosetruecolor ison thesurfaceof thecube,it mustbethepoint thathastheminimum òø . So, òI of thatpointis its trueairlight. Hence,from(26), theairlightsandtruecolorsof theentirescenecanbecomputedwithoutusingacleardayimage.
Usually in urbanscenes,window interiorshave very littlecolorof theirown. Their intensitiesaresolelydueto airlightandnotdueto directtransmission.In otherwords,their truecolor is black (the origin of the color cube). We detectedsuchpointsin the sceneusingthe above techniqueandre-coveredthe true colorsof two foggy andhazyscenes(seefigure(8)).

8 ConclusionIn this paper, we presenteda generalchromaticframeworkfor sceneunderstandingunderbadweatherconditions.Notethat conventional image enhancementtechniquesare notuseful heresincethe effects of weathermust be modeledusingatmosphericscatteringprinciplesthatarecloselytiedto scenedepth. We basedour work on the simpleyet use-ful dichromaticmodel. Severalusefulconstraintson scenecolor changesdueto differentatmosphericconditionswerederived. Using theseconstraints,we developedsimpleal-gorithmsto recover thethreedimensionalstructureandtruecolorsof scenes,fromimagestakenunderpoorweathercon-ditions. Thesealgorithmsweredemonstratedfor bothsyn-theticandrealscenes.
References[All76] E. Allard. Memoire sur l’intensite’ et la porteedes
phares.paris,dunod.1876.
[Bou30] P. Bouguer. Traite’ d’optiquesur la gradationde la lu-miere.1730.
[CK97] F. CozmanandE. Krotkov. Depthfrom scattering.Pro-ceedingsof the 1997 Conferenceon ComputerVisionandPatternRecognition, 31:801–806,1997.
[GC66] J.GordonandP. Church.Overcastsky luminancesanddirectionalluminousreflectancesof objectsand back-groundsunderovercastskies. Applied Optics, 5:919,1966.
[Hor86] B.K.P. Horn. RobotVision. TheMIT Press,1986.
[Hul57] VanDeHulst. Light ScatteringbysmallParticles. JohnWiley andSons,1957.
[Kos24] H. Koschmieder. Theorieder horizontalensichtweite.Beitr. Phys.freienAtm.,, 12:33–53,171–181,1924.
[McC75] E.J.McCartney. Opticsof the Atmosphere: Scatteringbymoleculesandparticles. JohnWiley andSons,1975.
[Mid52] W.E.K.Middleton.VisionthroughtheAtmosphere. Uni-versityof TorontoPress,1952.
[MS42] P. Moon and D.E. Spencer. Illumination from a non-uniformsky. Illum Eng., 37:707–726,1942.
[NN99] S.K.NayarandS.G.Narasimhan.Visionin badweather.Proceedingsof the 7th International Conference onComputerVision, 1999.
[Web00] Website. http://www.cs.columbia.edu/cave/research/publications/visionweather.html. 2000.
A Direct Transmission under Overcast SkiesWe presentananalysisof theeffect of sky illuminationandits reflectionby a scenepoint, on the direct transmissionfrom the scenepoint. For this, we make two simplifyingassumptionson the illumination received by scenepoints.Usually, thesky is overcastunderfoggy conditions.Soweusethe overcastsky model[GC66] for environmentalillu-mination.We alsoassumethat theirradianceof eachscene
δθ δφ
Pù
n
δω
Ω
Sky
Figure 9: Theilluminationgeometryof ascenepoint ú with sur-facenormal Sû . Theirradianceof ú is dueto theairlight radianceof its sky apertureü ãpoint is dominatedby the radianceof the sky, andthat theirradiancedueto otherscenepointsis notsignificant.
Considertheilluminationgeometryshown in figure(9). Let@be a point on a surfaceand ýþ be its normal. We define
the sky aperture ÿ of point@
, as the coneof sky visiblefrom
@. Consideran infinitesimalpatchof thesky, of size
in polarangleand
in azimuthasshown in figure(9).Let this patchsubtenda solid angle
at@
. For overcastskies, Moon[MS42] and Gordon[GC66] have shown thatthe radianceof the infinitesimalcone
ÿ , in the direction is givenbyh G y VïXë[ where [ Y # Hence,theirradianceat
@dueto theen-
tire apertureÿ , is givenby
* 3 G y VïXë[ VïXë[ [ Y (28)
whereVïXë[ accountsfor foreshortening[Hor86]. If is theBRDF of
@, thentheradiancefrom
@towardtheobserver
canbewrittenas
'8 ' 0 (29)
where Ø G y VïXë[ VïXë[ [ Y # Let be the pro-jection of a unit patcharound
@, on a planeperpendicu-
lar to the viewing direction. Then,the radiantintensityof@is given by 9 8 8 0# Since
is a con-stantwith respectto
and
, we can factor it out of the
integral and write conciselyas 9 8 > where>H 0 # This term > representsthe sky apertureandthe reflectancein the directionof theviewer. Substitutingfor 9 80 in the direct transmissionmodelin (5), weobtain
* - > 7 "! = # (30)
We have thus formulatedthe direct transmissionmodel intermsof overcastsky illuminationandthereflectanceof thescenepoints.