Embed Size (px)
Citation preview
CHOROS: IMPROVING THE PERFORMANCE OF QUALITATIVE SPATIAL REASONING IN OWL
Nikolaos Mainas, Euripides G.M. Petrakis
Technical University Of Crete (TUC), GreeceIntelligent Systems Laboratorywww.intelligence.tuc.gr
Qualitative Spatial InformationQualitative information is
expressed without numerical values using a vocabulary of relationships◦Example: “TUC is located north of the port of Souda”
Spatial information can be described using the topology and orientation of spatial entities (e.g., objects or regions)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 2
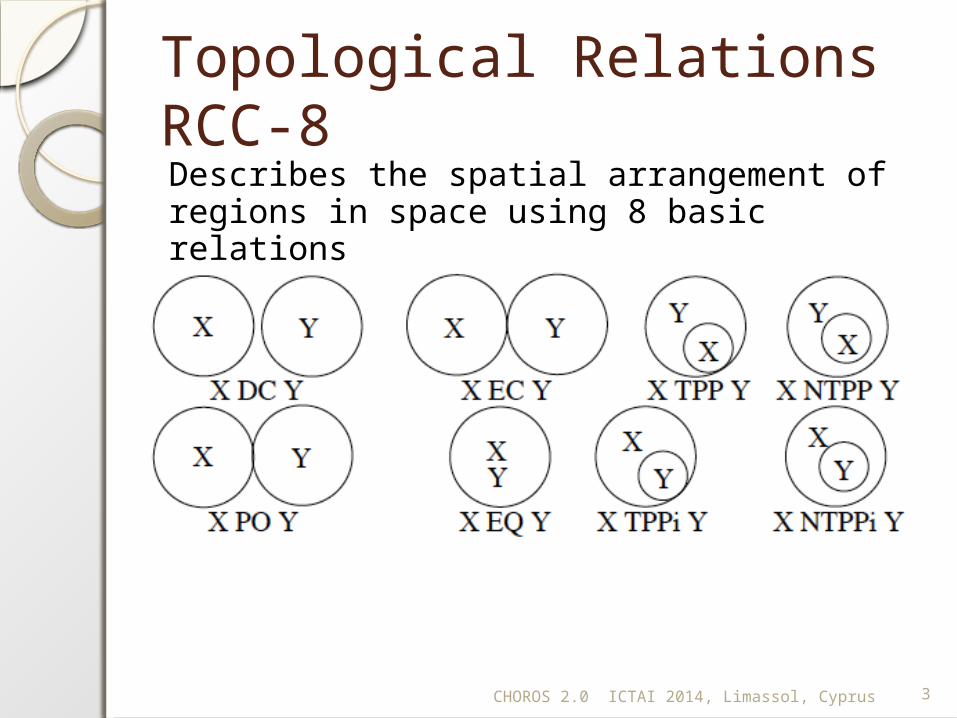
Topological Relations RCC-8Describes the spatial arrangement of regions in space using 8 basic relations
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 3
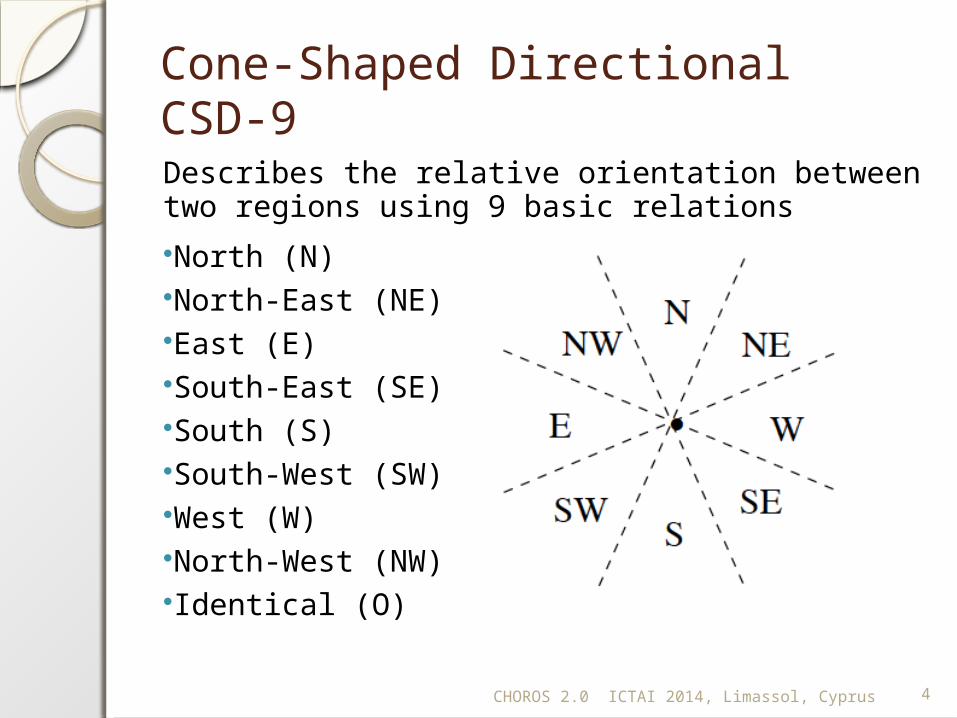
Cone-Shaped Directional CSD-9
Describes the relative orientation between two regions using 9 basic relations North (N) North-East (NE) East (E) South-East (SE) South (S) South-West (SW) West (W) North-West (NW) Identical (O)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 4
Why Spatial Reasoning ? In ontologies, spatial information is
expressed in OWL: concepts (Classes) and the relationships between them (Properties)
OWL cannot fully encode the semantics of spatial relations
Individuals: A, B, CObjectProperties: East, WestObjectPropertyExpression: (East inverse West)Assertions: (A East B), (B South C)An OWL DL reasoner (Pellet) can infer (B West A) but cannot infer (A {East, South, SouthEast C)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 5
Spatial Representation
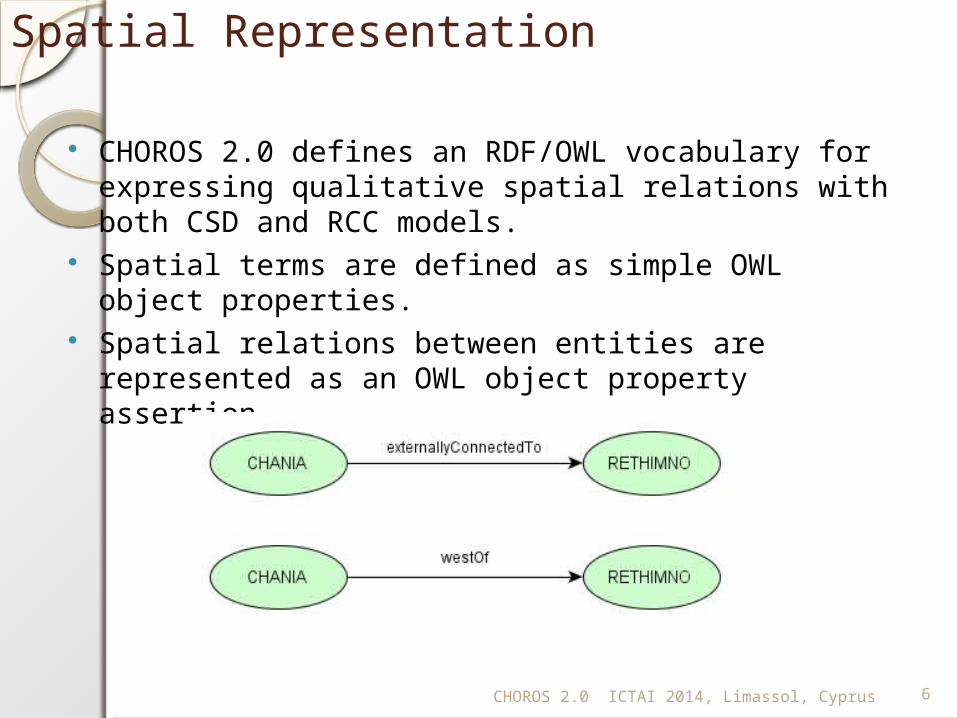
CHOROS 2.0 defines an RDF/OWL vocabulary for expressing qualitative spatial relations with both CSD and RCC models.
Spatial terms are defined as simple OWL object properties.
Spatial relations between entities are represented as an OWL object property assertion.
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 6
Qualitative Spatial Reasoning Given a set of N spatial entities and their
RCC-8 and CSD-9 relations, new relations are inferred using compositions of existing relations
◦ (A South B) ͦ (B SouthWest C) → (A {South, SouthWest} C)
◦ (A TPP B) ͦ (B EC C) → (A {DC, EC} C) Path-consistency (Nijel et.al. 2013): The
inferred relations are checked with existing ones for consistency until no new relations are added or an inconsistency is detected (the composition is rejected)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 7
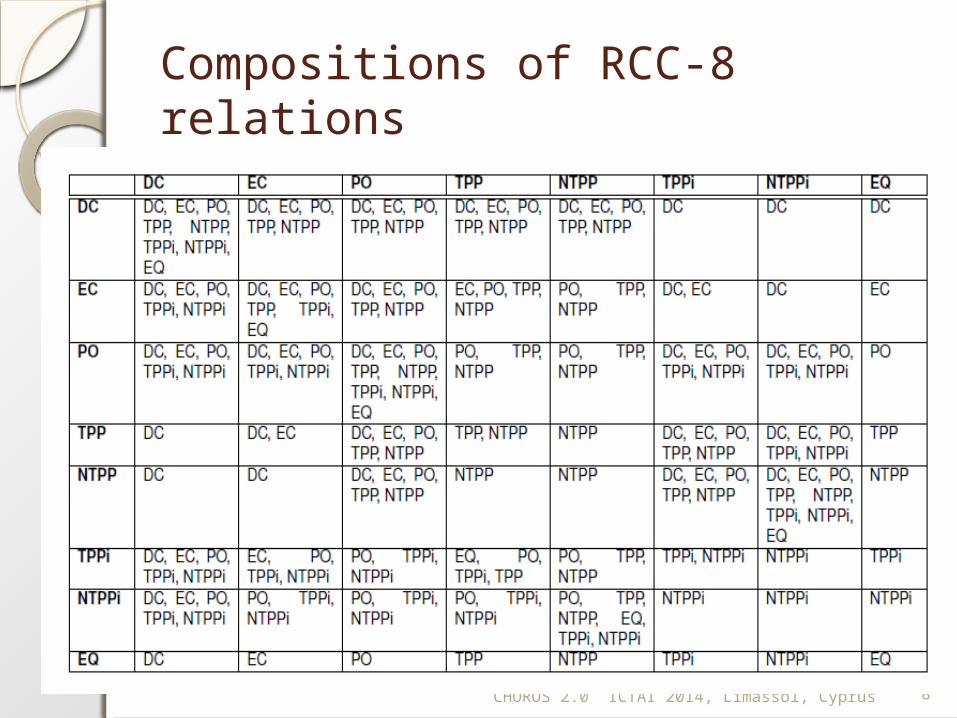
Compositions of RCC-8 relations
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 8
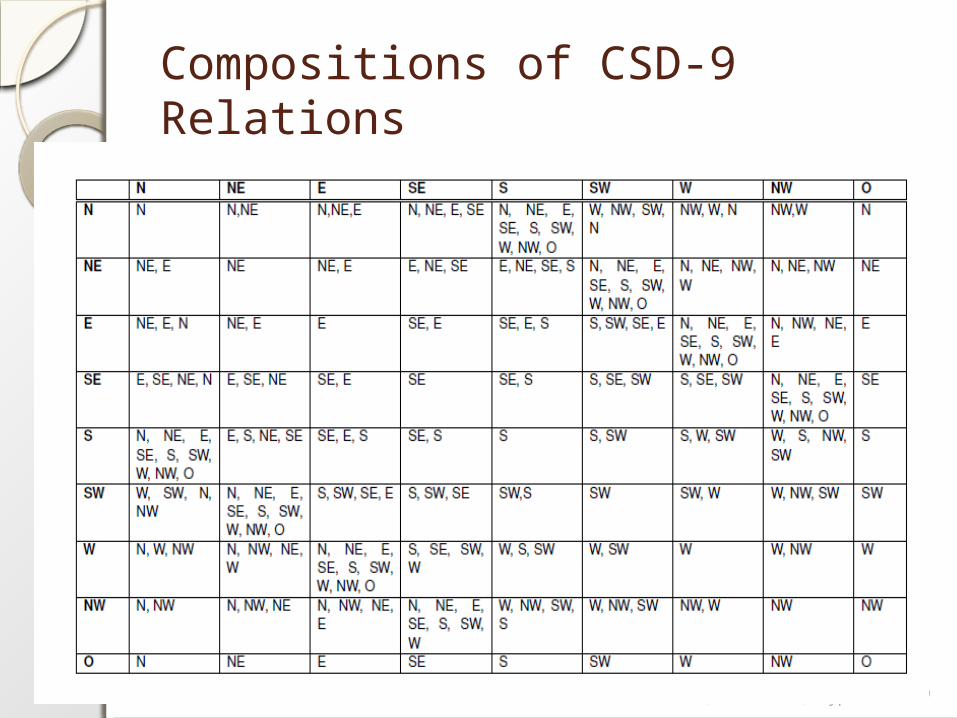
Compositions of CSD-9 Relations
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 9
Previous Work
SOWL (Batsakis, Petrakis 2012): An ontology for spatial CSD-9 and RCC-8 relations and temporal information A reasoner is implemented using SWRL rules
and OWL 2.0 property axiomsPelletSpatial (M. Stocker, E. Sirin, 2009): Extends Pellet to support reasoning over RCC-8 relations Implemented in Java Reasoning on CSD-9 relations is not supportedCHOROS 1.0 (Christodoulou, Petrakis, Batsakis 2012): Extends PelletSpatial to support CSD-9 relations
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 10
CHOROS 2.0Improves CHOROS 1.0 in several ways:compositions are computed on the fly
rather than stored in memory Speeds-up reasoning by decomposing
CSD-9 relations into two relation sets with 4 relations, each one
Similarly to CHOROS 1.0 separates spatial reasoning from semantic OWL-DL reasoning (also CSD-9 is separated from RCC-8 reasoning)
Updates the ontology with the results of reasoning
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 11
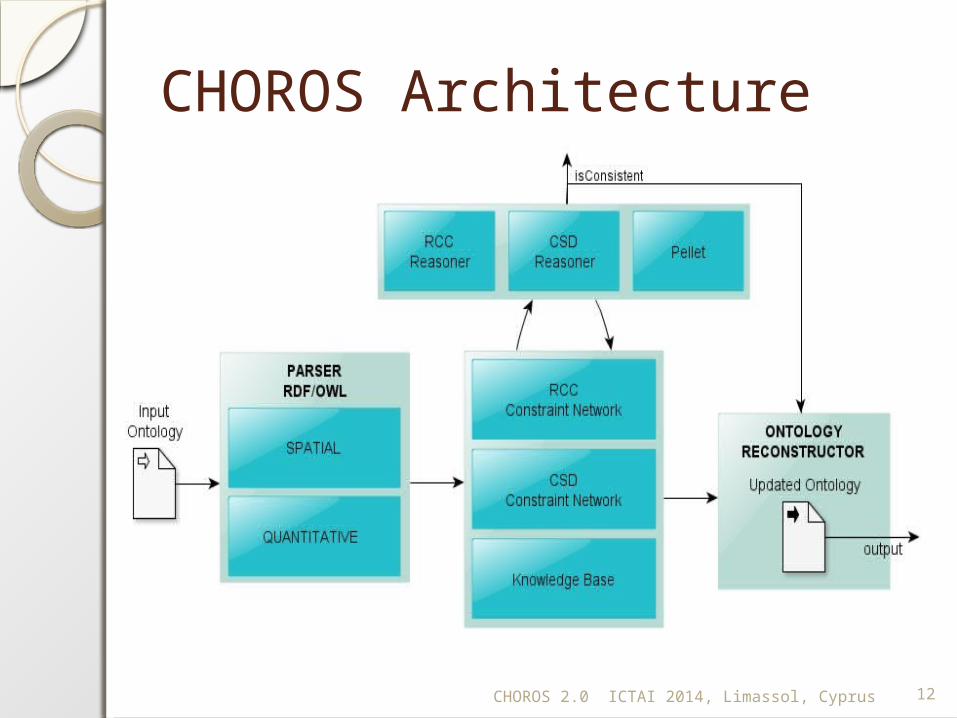
CHOROS Architecture
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 12
ImplementationParser: loads ontologies and extracts their spatial relations Quantitative parser: computes CSD-9, RCC-8 relations
from Qualitative parser: CSD-9, RCC-8, OWL triples are
stored in their respective CN Constraint Network (CN): stores spatial and non-
spatial information One CN for each relation type Non-spatial relations are stored in Pellet’s Knowledge
Base Assertion Box (assertions about individuals) Terminological Box (axioms about classes)Reasoner: applies consistency checking and logical inferenceRe-constructor: updates ontology with new spatial inferences
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 13
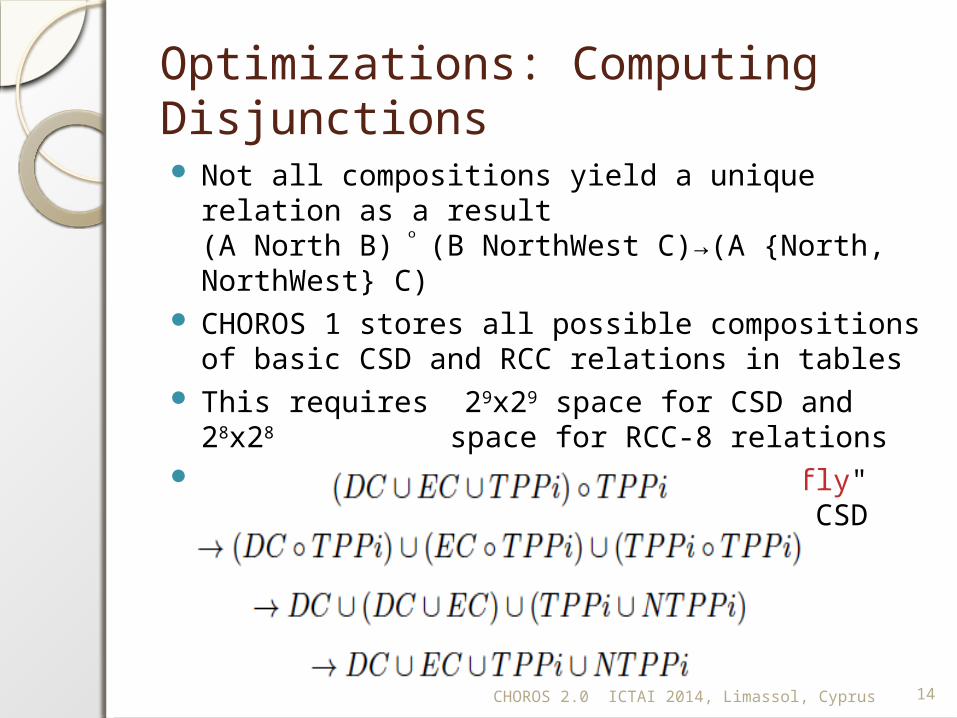
Optimizations: Computing Disjunctions Not all compositions yield a unique relation as a
result(A North B) (B NorthWest C)→(A {North, ͦNorthWest} C)
CHOROS 1 stores all possible compositions of basic CSD and RCC relations in tables
This requires 29x29 space for CSD and 28x28 space for RCC-8 relations
Compositions are computed "on the fly" using simple look-up operations on CSD and RCC composition tables
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 14
Optimizations: Reduction of Basic Relations CSD relation identicalTo is replaced with
OWL axiom sameAs RCC relation EQ with OWL axiom sameAs Less relations for the spatial reasoners Identical relations are asserted into
Pellet’s KB and are treated as standard OWL axioms
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 15
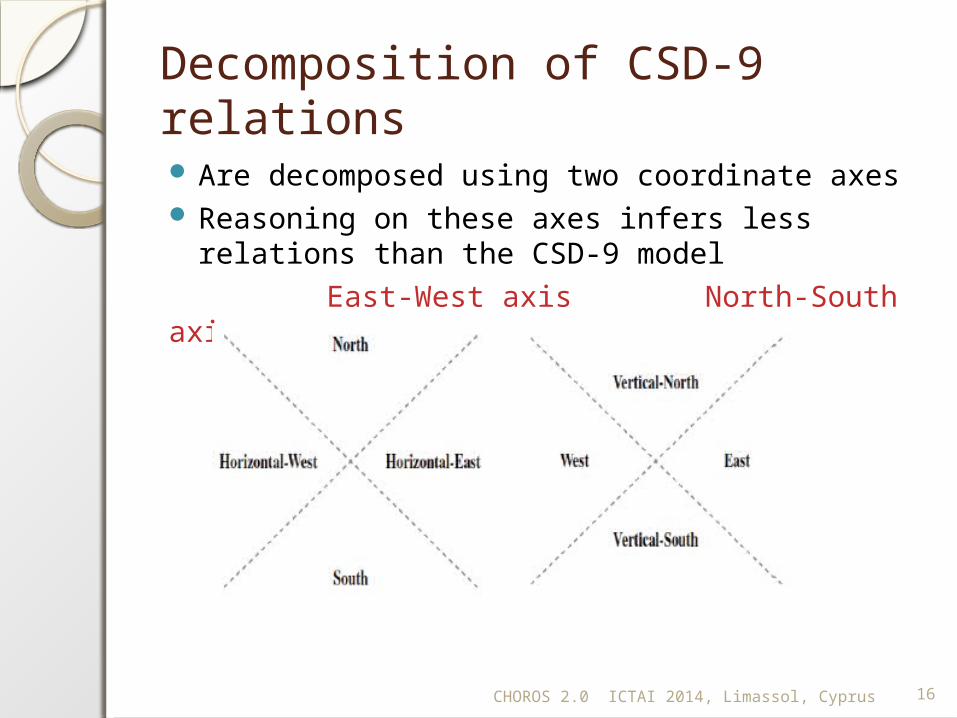
Decomposition of CSD-9 relations Are decomposed using two coordinate axes Reasoning on these axes infers less relations
than the CSD-9 model
East-West axis North-South axis
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 16
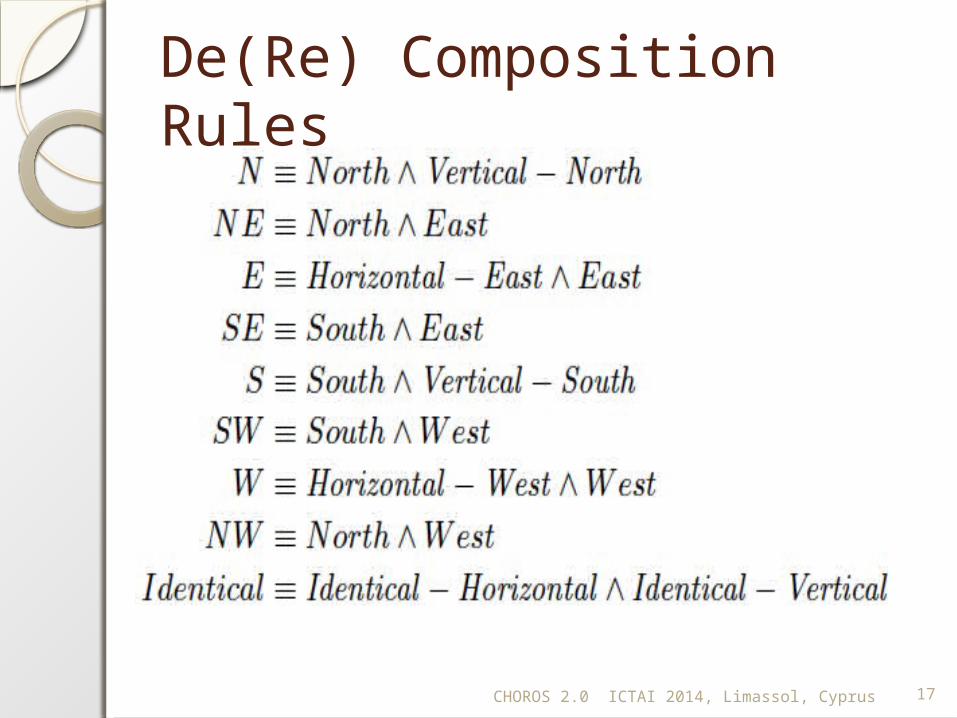
De(Re) Composition Rules
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 17
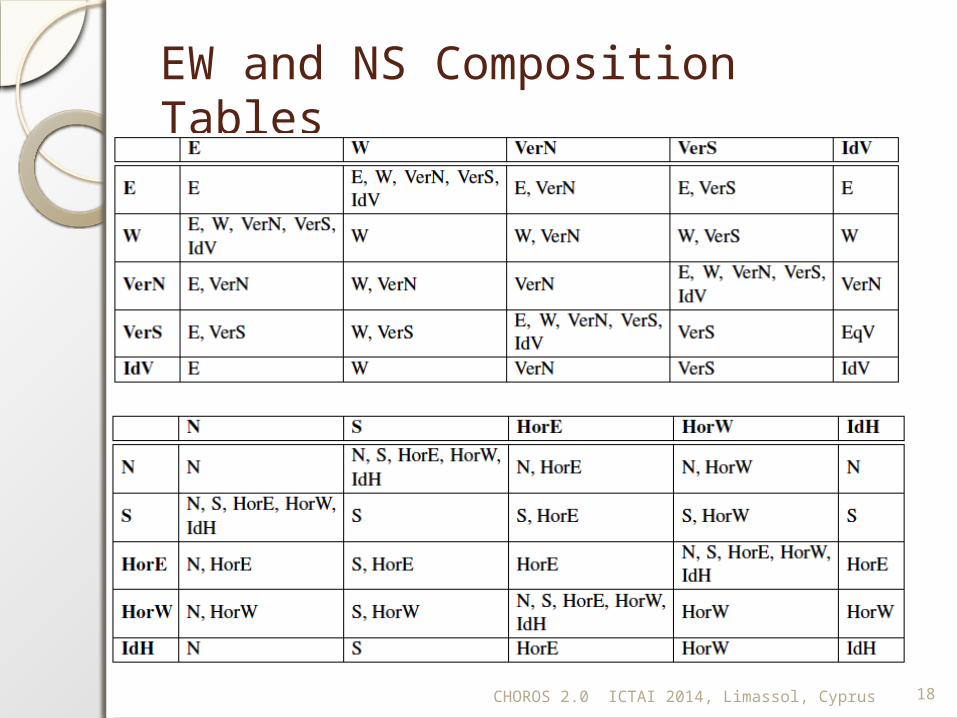
EW and NS Composition Tables
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 18
Evaluation Path Consistency when applied on a set of
assertions containing only basic relations guarantees tractable, sound and complete reasoning
Path consistency is O(N3) in the worst case ◦ When exactly N2 relations are produced from N
input relations e.g., when N objects are each one North of another
◦ Inconsistencies may terminate reasoning earlier
Complexity less than O(N2) in the average case ◦ When less than N2 relations are produced from N
input relations e.g., N objects with random relations
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 19
Experimental Set-upCompare CHRONOS 2 with SOWL and
CHOROS 1 in the average and worst caseMeasure running time as a function of the
size of input data set (number or relations in an ontology)
10 ontologies comprising between 10 and 100 assertions
All measurements are averages over 10 runs
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 20
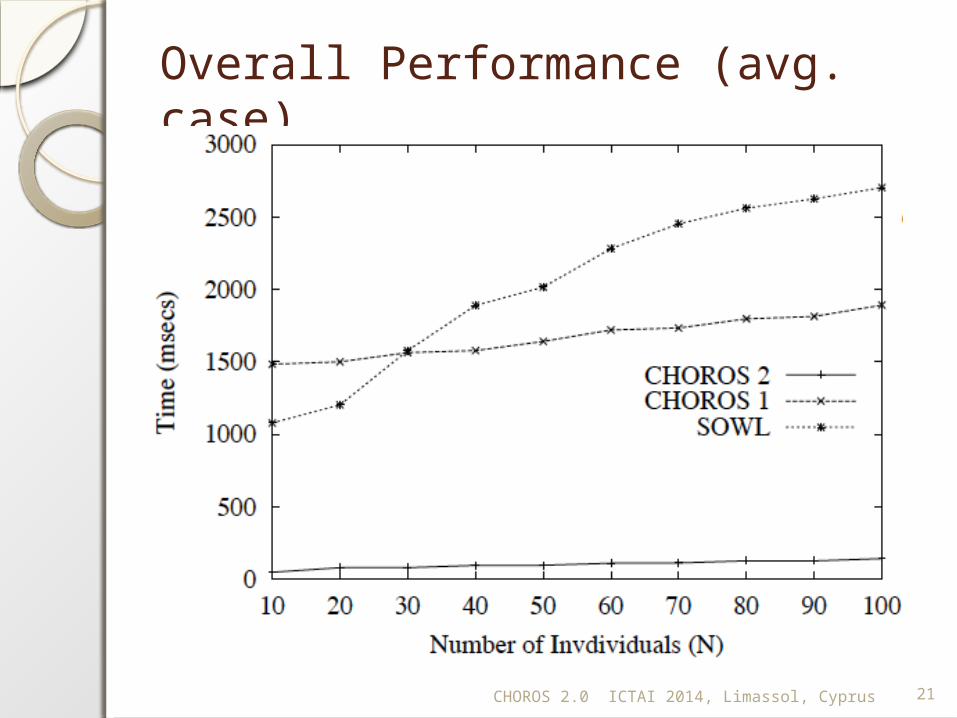
Overall Performance (avg. case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 21
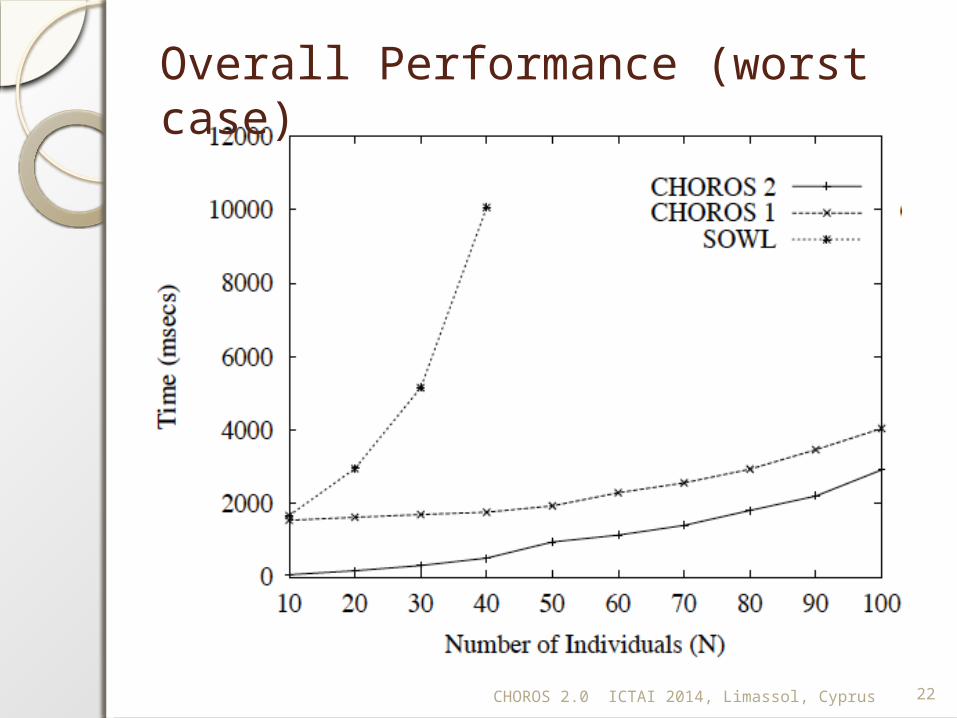
Overall Performance (worst case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 22
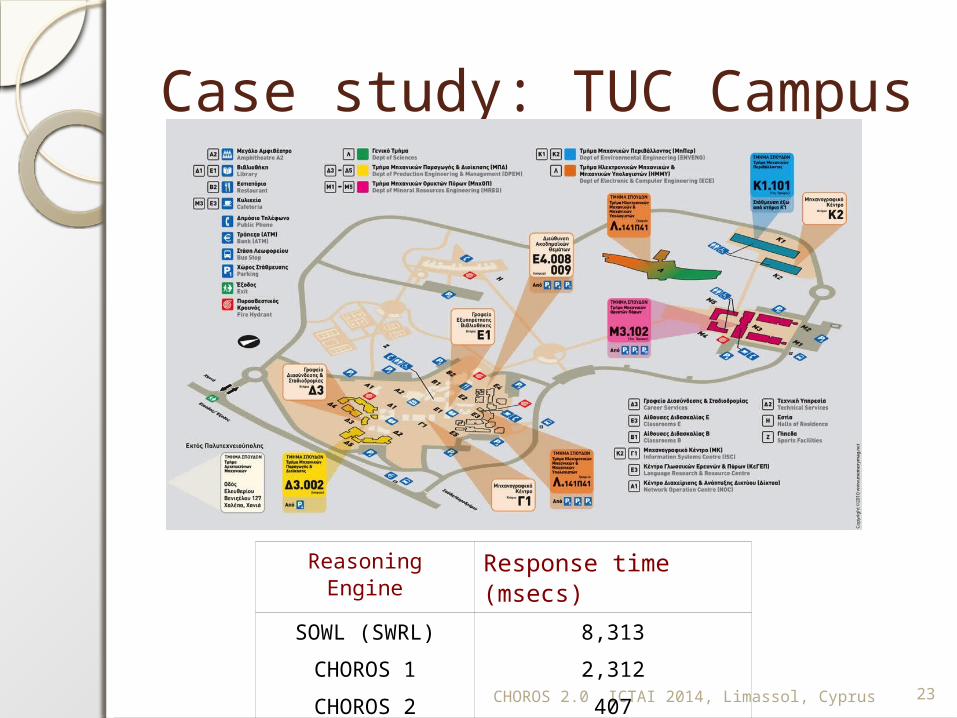
Case study: TUC Campus
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 23
Reasoning Engine Response time (msecs)
SOWL (SWRL) 8,313
CHOROS 1 2,312
CHOROS 2 407
ConclusionsCHOROS 2 is a qualitative spatial reasoner
for both CSD-9 and RCC-8 calculi Implements several optimizations and runs
faster than its SWRL counterpart Future work
Investigate on more effective reasoning methods e.g., small sets of basic relations for CSD and RCC
Support OWL 2 restrictions on spatial relations Extent for spatio-temporal information Performance on real applications (expedition of
Alexander the Great into Asia)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 24
THANK YOU
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 25
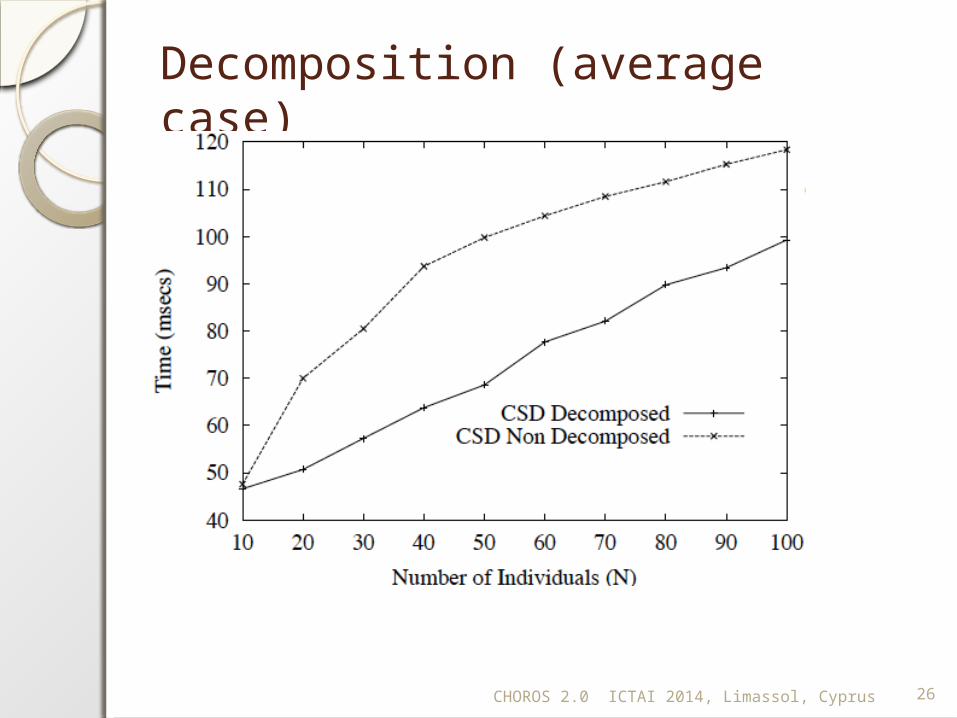
Decomposition (average case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 26
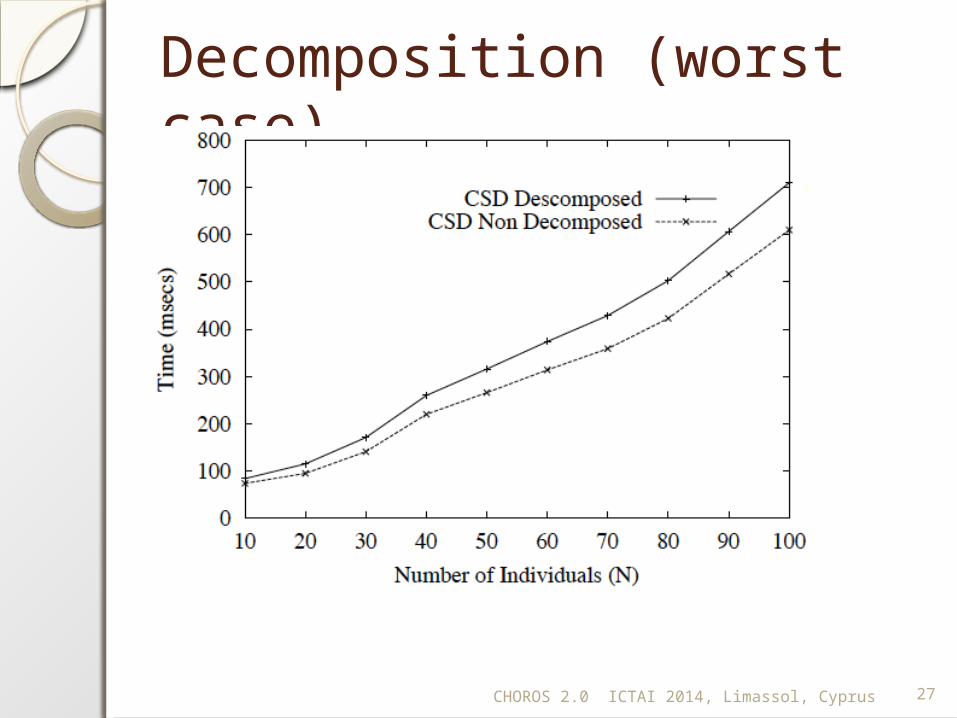
Decomposition (worst case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 27
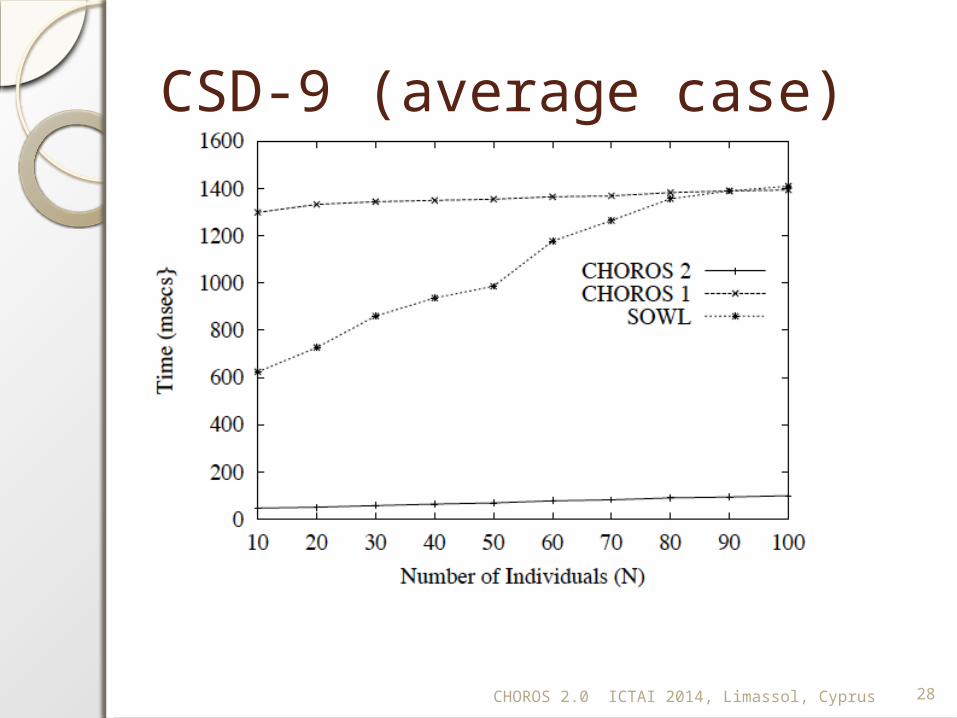
CSD-9 (average case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 28
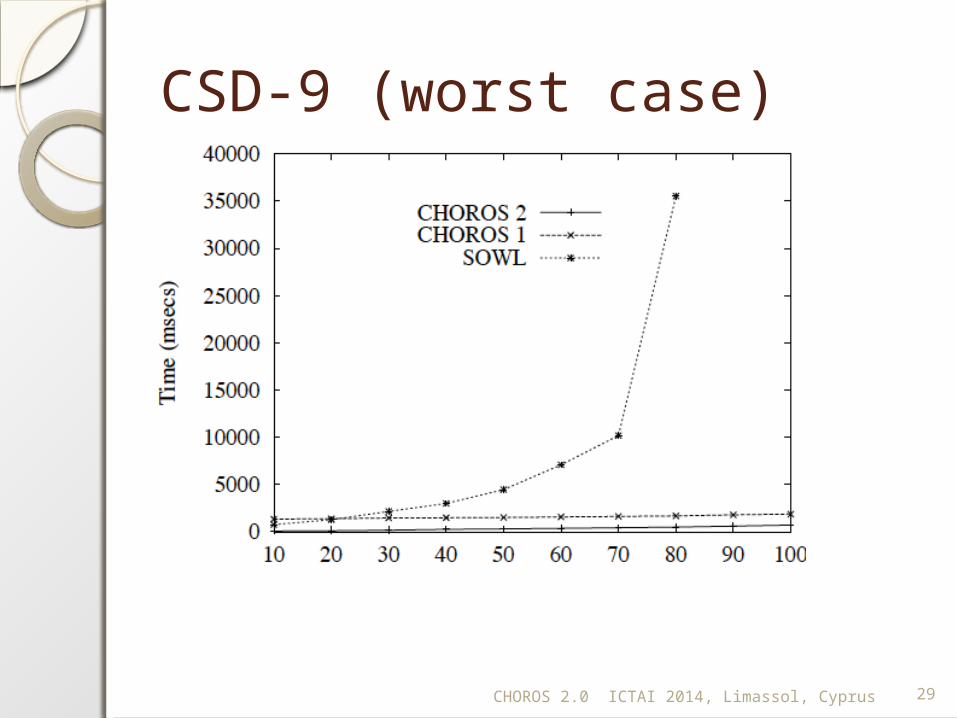
CSD-9 (worst case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 29
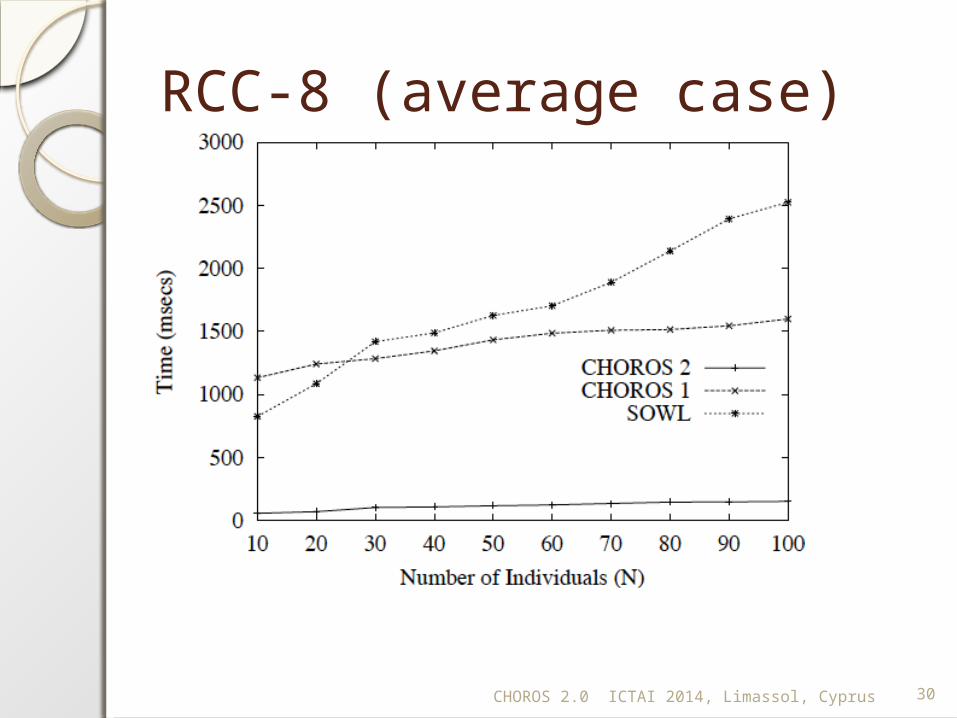
RCC-8 (average case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 30
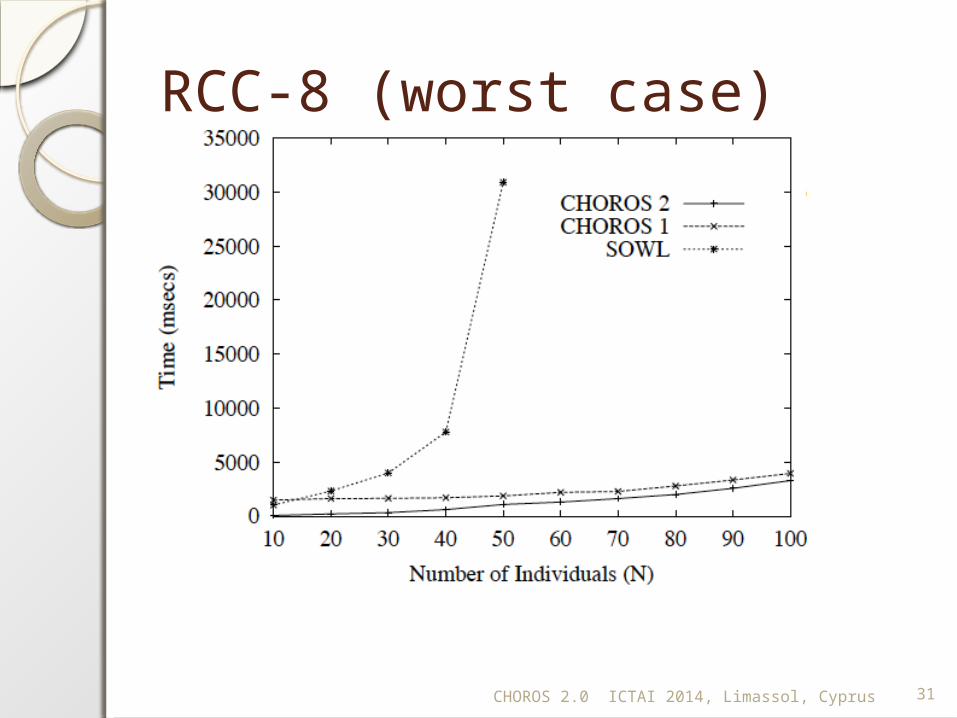
RCC-8 (worst case)
CHOROS 2.0 ICTAI 2014, Limassol, Cyprus 31