Embed Size (px)
Citation preview

CHEE825/435 - Fall 2005
J. McLellan 1
Dynamic Experiments
Maximizing the Information Content for Control Applications

CHEE825/435 - Fall 2005
J. McLellan 2
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 3
Types of Input Signals
• deterministic signals» steps» pulses» sinusoids
• stochastic signals» white noise» correlated noise
• what are the important characteristics?

CHEE825/435 - Fall 2005
J. McLellan 4
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 5
Important Characteristics
• signal-to-noise ratio• duration• frequency content• optimum input (deterministic / random) depends on
intended end-use– control– prediction

CHEE825/435 - Fall 2005
J. McLellan 6
Signal-to-Noise Ratio
• improves precision of model» parameters» predictions
• avoid modeling noise vs. process• trade-off
» short-term pain vs. long-term gain» process disruption vs.expensive retesting / poor
controller performance
• note - excessively large inputs can take process into region of nonlinear behaviour

CHEE825/435 - Fall 2005
J. McLellan 7
Example - Estimating 1st Order Process Model with RBS Input
True model y tq
qu t a t( )
.
.( ) ( )
10 6
1 0 75
1
1
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
3.5
4
Time
Step Response
confidenceintervals aretighter with increasing SNR
1:1
10:1
less preciseestimate ofsteady stategain
more preciseestimateof transient

CHEE825/435 - Fall 2005
J. McLellan 8
Example - Estimating First-Order Model with Step Input
0 5 10 15 20 25 30 35 40-2
-1
0
1
2
3
4
5
6
Time
Step Response
1:1
10:1
more preciseestimate ofgain vs.RBS input
less precise estimateof transient
response99% confidenceinterval

CHEE825/435 - Fall 2005
J. McLellan 9
Test Duration
• how much data should we collect?• want to capture complete process dynamic response• duration should be at least as long as the settling
time for the process (time to 95% of step change)• failure to allow sufficient time can lead to misleading
estimates of process gain, poor precision
CHEE825/435 - Fall 2005
J. McLellan 10
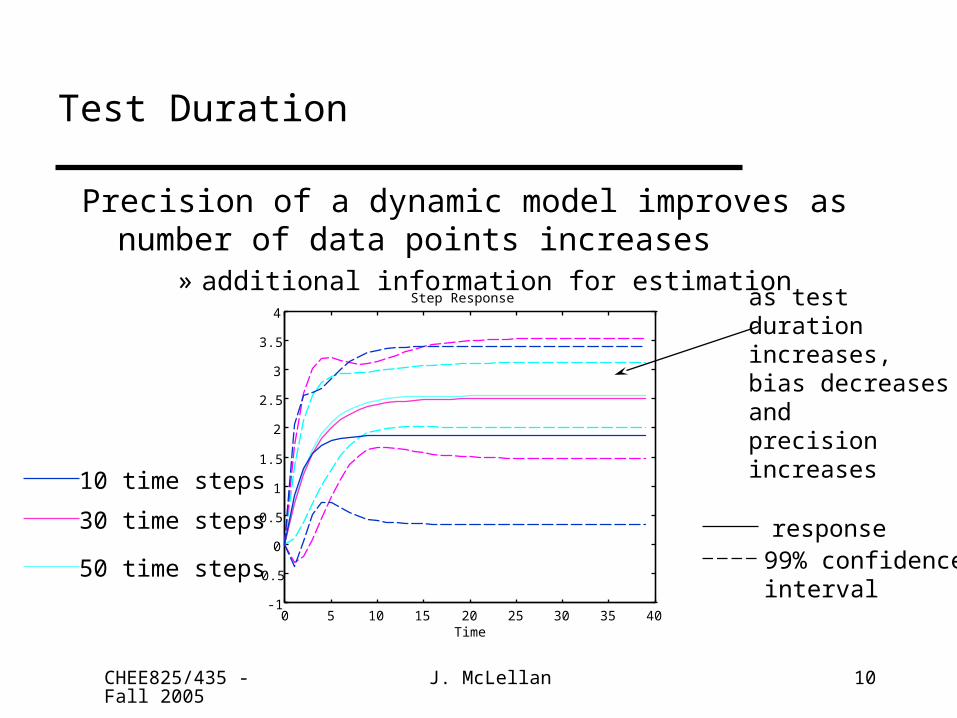
Test Duration
Precision of a dynamic model improves as number of data points increases
» additional information for estimation
0 5 10 15 20 25 30 35 40-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Time
Step Response as test duration increases,bias decreasesand precision increases
response99% confidenceinterval
10 time steps
30 time steps
50 time steps

CHEE825/435 - Fall 2005
J. McLellan 11
“Dynamic Content”
• what types of transients should be present in input signal?– excite process over range of interest– model is to be used in controller for:
» setpoint tracking» disturbance rejection
• need orderly way to assess dynamic content» high frequency components - fast dynamics» low frequency components - slow dynamics / steady-
state gain

CHEE825/435 - Fall 2005
J. McLellan 12
Frequency Content - Guiding Principle
The input signal should have a frequency content matching
that for end-use.

CHEE825/435 - Fall 2005
J. McLellan 13
Looking at Frequency Content
• ideal - match dynamic behaviour of true process as closely as possible
• goal - match the frequency behaviour of the true process as closely as possible
• practical goal - match frequency behaviour of the true process as closely as possible, where it is most important

CHEE825/435 - Fall 2005
J. McLellan 14
Experimental Design Objective
Design input sequence to minimize the following:
design
cost
error in
predicted frequency response
importance
function
our designobjectives
difference in predicted vs.true behaviour- function of frequency, andthe input signal used

CHEE825/435 - Fall 2005
J. McLellan 15
Accounting for Model Error - Interpretation
Optimal solution in terms of frequency content:
spectral density
frequencyerror in model vs.true process
spectral density
frequency
importance to ourapplication
low
highvery important
not important*J=

CHEE825/435 - Fall 2005
J. McLellan 16
Accounting for Model Error
Consider frequency content matching
Goal - best model for final application is obtained by minimizing J
J G e G e C j dj T j T
frequencyrange
$( ) ( ) ( ) 2}
bias in frequencycontent modeling
}
importanceof matching- weightingfunction

CHEE825/435 - Fall 2005
J. McLellan 17
Example - Importance Function for Model Predictive Control
spectral density
frequency
high frequency disturbance rejectionperformed by base-levelcontrollers- > accuracy not importantin this range
require good estimateof steady state gain,slower dynamics

CHEE825/435 - Fall 2005
J. McLellan 18
Desired Input Signal for Model Predictive Control
• sequence with frequency content concentrated in low frequency range– PRBS (or random binary sequence - RBS)
• step input– will provide for good estimate of gain, but not of transient
dynamics

CHEE825/435 - Fall 2005
J. McLellan 19
Control Applications
For best results, input signal should have frequency content in range of closed-loop process bandwidth– recursive requirement!– closed-loop bandwidth will depend in part on controller
tuning, which we will do with identified model

CHEE825/435 - Fall 2005
J. McLellan 20
Control Applications
One Approach:Design input frequency content to include:– frequency band near bandwidth of open-loop plant (~1/time
constant)– frequency band near desired closed-loop bandwidth– lower frequencies to obtain good estimate of steady state
gain

CHEE825/435 - Fall 2005
J. McLellan 21
Frequency Content of Some Standard Test Inputs
frequency
power
low frequency - like a series of long steps
high frequency - like a series of short steps

CHEE825/435 - Fall 2005
J. McLellan 22
Frequency Content of Some Standard Test Inputs
Step Input
power
frequency0
power is concentrated at low frequency - provides good information about steady state gain, more limited infoabout higher frequency behaviour

CHEE825/435 - Fall 2005
J. McLellan 23
Example - Estimating First-Order Model with Step Input
0 5 10 15 20 25 30 35 40-2
-1
0
1
2
3
4
5
6
Time
Step Response
1:1
10:1
more preciseestimate ofgain vs.RBS input
less precise estimateof transient
response99% confidenceinterval

CHEE825/435 - Fall 2005
J. McLellan 24
Frequency Content of Some Standard Test Inputs
White Noise – approximated by pseudo-random or random binary
sequences
power
frequency
power is distributed uniformlyover all frequencies- broader information, but poorerinformation about steady state gain
ideal curve

CHEE825/435 - Fall 2005
J. McLellan 25
Example - Estimating 1st Order Process Model with RBS Input
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
3.5
4
Time
Step Response
less preciseestimate ofsteady stategain
more preciseestimateof transient
1:1
10:1
response99% confidenceinterval

CHEE825/435 - Fall 2005
J. McLellan 26
Frequency Content of Some Standard Test Inputs
Sinusoid at one frequency
power
frequency
power concentrated at onefrequency correspondingto input signal- poor information aboutsteady state gain, otherfrequencies

CHEE825/435 - Fall 2005
J. McLellan 27
Frequency Content of Some Standard Test Inputs
Correlated noise– consider u
qucorr white
01
1 0 9 1.
.
power
frequency
variability is concentrated at lowerfrequencies- will lead to improved estimate ofsteady state gain, poorer estimate ofhigher frequency behaviour

CHEE825/435 - Fall 2005
J. McLellan 28
Persistent Excitation
In order to obtain a consistent estimate of the process model, the input should excite all modes of the process
– refers to the ability to uniquely identify all parts of the process model

CHEE825/435 - Fall 2005
J. McLellan 29
Persistent Excitation
Persistent excitation implies a richness in the structure of the input– input shouldn’t be too correlated
Examples– constant step input
» highly correlated signal » provides unique info about process gain
– random binary sequence » low correlation signal» provides unique info about additional model parameters
CHEE825/435 - Fall 2005
J. McLellan 30
Persistent Excitation - Detailed Discussion
• Example - consider an impulse response process representation
• formulate estimation problem in terms of the covariances of u(t)
• can we obtain the impulse weights?• consider estimation matrix • persistently exciting of order n - definition• spectral interpretation

CHEE825/435 - Fall 2005
J. McLellan 31
Persistence of Excitation
• Add in defn in terms of covariance -

CHEE825/435 - Fall 2005
J. McLellan 32
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other types of input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 33
Pseudo-Random Binary Sequences
(PRBS Testing)

CHEE825/435 - Fall 2005
J. McLellan 34
What is a PRBS?
• approximation to white noise input• white noise
» Gaussian noise» uncorrelated» constant variance» zero mean
• PRBS is a means of approximating using two levels (high/low)

CHEE825/435 - Fall 2005
J. McLellan 35
PRBS
• traditionally generated using a set of shift registers• can be generated using random numbers
– switch to high/low values
• generation by finite representation introduces periodicity
» try to get period large relative to data length

CHEE825/435 - Fall 2005
J. McLellan 36
PRBS Signal
Alternates in a random fashion between two values:
0 20 40 60 80 100-2
-1.5
-1
-0.5
0
0.5
1
1.5
2prbs input
time step
value
input magnitude
minimumswitchingtime
test duration

CHEE825/435 - Fall 2005
J. McLellan 37
How well does PRBS approximate white noise?
Compare spectra:
10-2
10-1
100
101
102
10-1
100
101
frequency
power
spectrum for 100 point PRBS signaltheoretical spectrumfor white noise
note concentrationof PRBS signalin lower frequencyrange
1 .minimum switch time

CHEE825/435 - Fall 2005
J. McLellan 38
PRBS Design Parameters
Amplitude– determines signal-to-noise ratio
» precision vs. process upsets– large magnitudes may bring in process nonlinearity as more
of the operating region is covered– could result in poor model because of
» estimation difficulties - e.g., gains, time constants not constant over range
» model selection difficulties - lack of clear indication of process structure

CHEE825/435 - Fall 2005
J. McLellan 39
PRBS Design Parameters
Minimum switch time– shortest interval in which value is held constant– value is sampling period for process– rule of thumb -> ~20-30% of process time constant– influences frequency content of signal
» small -> more high frequency content» large -> more low frequency content
≥

CHEE825/435 - Fall 2005
J. McLellan 40
PRBS Design Procedure
• select amplitude» two levels
• decide on desired frequency content» high/low
• shape frequency content by– adjusting minimum switching time
OR by filtering PRBS with first-order filter
OR by modifying PRBS to make probability of switching 0.5

CHEE825/435 - Fall 2005
J. McLellan 41
Other PRBS Design Parameters - Switching Probability
• another method of adjusting frequency content• given a two-level white noise input e(t), define input to
process as
• as increases, input signal switches less frequently --> lower frequencies are emphasized
u tu t withprobabilit y
e t with probability( )
( )
( )
1
1

CHEE825/435 - Fall 2005
J. McLellan 42
Switching Probability ...
• as increases to 1, starts to approach a step• this approach shapes frequency content by
introducing correlation– same correlation structure can be introduced using first-
order filter

CHEE825/435 - Fall 2005
J. McLellan 43
Manual vs. Automatic PRBS Generation
• PRBS inputs can be generated automatically – using custom software– using Excel, Matlab, MatrixX, Numerical Recipes routine, ...
• shaping frequency content is usually an iterative procedure– select design parameters (e.g., switching time) and assess
results, modify as required– select filter parameters

CHEE825/435 - Fall 2005
J. McLellan 44
Manual Generation
• sequence of step moves determined manually– can resemble PRBS with appropriate design parameters– gain additional benefits beyond single step test
• recommended procedure– decide on a step sequence with desired frequency content
BEFORE experimentation– modify on-line as required, but assess impact of
modifications on input frequency content and thus information content of data set

CHEE825/435 - Fall 2005
J. McLellan 45
A final comment on frequency content...
Increasing low frequency content typically introduces slower steps up/down– brings potential benefit of being able to see initial process
transient– provides an indication of time delay magnitude

CHEE825/435 - Fall 2005
J. McLellan 46
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other types of input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 47
What other signals are available & when should they be used?
Sinusoids– particularly for direct estimation of frequency response– introduce combination of sinusoids and reconstruct frequency
spectrum– a sequence of steps of the same duration has same
properties– danger - difficult to “eyeball” delay because no sharp
transients

CHEE825/435 - Fall 2005
J. McLellan 48
What other signals are available, and when should they be used?
Steps and Impulses– represent low frequency inputs– useful for direct transient analysis
» indication of gain, time constants, time delays, type of process (1st/2nd order, over/underdamped)
– step inputs» good estimate of gain» less precise estimate of transients

CHEE825/435 - Fall 2005
J. McLellan 49
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other types of input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 50
Dealing with Multivariable Processes
Approaches
• Perturb inputs sequentially and estimate models for each input-output pair (SISO)
• Perturb all inputs simultaneously and estimate models for a given output (MISO)
» using independent input test sequences
» using correlated input test sequences
• Perturb all inputs simultaneously and estimate models for all outputs simultaneously (MIMO)

CHEE825/435 - Fall 2005
J. McLellan 51
SISO Approach
• introduce sequence of independent signals for each input
• estimate SISO transfer functions individually for each input/output pair
• advantage– easier to identify model structure
• disadvantage– reconciling disturbance models for each output– difficult to guarantee all other inputs are constant– residual effects of input test sequences?

CHEE825/435 - Fall 2005
J. McLellan 52
MISO Approach
• introduce independent signals for all inputs, use data for a single output
• estimate transfer functions simultaneously• advantage
– easier to identify model structure
• disadvantage– no information about directionality of process– may not identify most compact representation of process

CHEE825/435 - Fall 2005
J. McLellan 53
Why do we use a MISO approach?
… because of the model form used:
process transfer + disturbance
function model
Approach– estimate transfer functions– fit disturbance to remaining residual error

CHEE825/435 - Fall 2005
J. McLellan 54
Independent Inputs
… are independent when the sequence for one input does not depend on the sequence for another input

CHEE825/435 - Fall 2005
J. McLellan 55
MIMO Approach with Correlated Inputs
• perturb all inputs simultaneously, but with cross-correlated inputs– input 1 has linear association with input 2– chances are when input 1 moves, input 2 also moves
independent inputs correlated inputs

CHEE825/435 - Fall 2005
J. McLellan 56
MIMO Approach with Correlated Inputs
• advantages– indication of process directionality– improved model estimates
• disadvantages– complexity of model– more difficulty recognizing model structure

CHEE825/435 - Fall 2005
J. McLellan 57
Outline
• types of input signals• characteristics of input signals• pseudo-random binary sequence (PRBS) inputs• other types of input signals• inputs for multivariable identification• input signals for closed-loop identification

CHEE825/435 - Fall 2005
J. McLellan 58
Input Signals for Closed-Loop Identification
Identification experiments can be conducted with the controllers on automatic.
Scenarios– unstable processes – avoiding disruption of operation
» quality targets» highly integrated processes

CHEE825/435 - Fall 2005
J. McLellan 59
Identification Signals for Closed-Loop Identification
Yt
UtSPt
+-
ControllerGc
ProcessGp
dither signal Wt
X++

CHEE825/435 - Fall 2005
J. McLellan 60
Where should the input signal be introduced?
Options:
Dither at the controller output
– clearer indication of process dynamics– better estimation properties– preferred approach
Perturbations in the setpoint
– additional controller dynamics will be included in estimated model

CHEE825/435 - Fall 2005
J. McLellan 61
What does the closed-loop data represent?
• dither signal case, without disturbances
Open-loop – input-output data represents
Closed-loop– input-output data represents
Y G Wt p t
YG
G GWt
p
p ct
1

CHEE825/435 - Fall 2005
J. McLellan 62
Implications for Input Signal Design
Importance of introducing some external excitation– non-parametric estimation procedures will simply identify
negative inverse of controller– difficult/dangerous to estimate process transfer function from
closed-loop data without external signal

CHEE825/435 - Fall 2005
J. McLellan 63
Implications for Input Signal Design
• can still use RBS, PRBS, and other signals• signal to noise ratio becomes more important
– make dither signal dominate loop– under large dither signal, properties of closed-loop
estimation approach those for open-loop case
• may be necessary to modify frequency content to accommodate closed-loop

CHEE825/435 - Fall 2005
J. McLellan 64
Interesting Point
When the dither signal large, the closed loop experiment is equivalent to filtering dither signal input by
and estimating process transfer function– could be optimal for disturbance rejection controllers
• the input to the process, U(t), is
1
1 G Gp c
)(1
1)( tW
GGtU
cp+=