Embed Size (px)
Citation preview
1
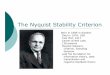
Nyquist Plot
Plot of in the complex plane as is varied on
Relation to Bode plot
AR is distance of from the origin Phase angle, , is the angle from the Real positive axis
Nyquist path
2
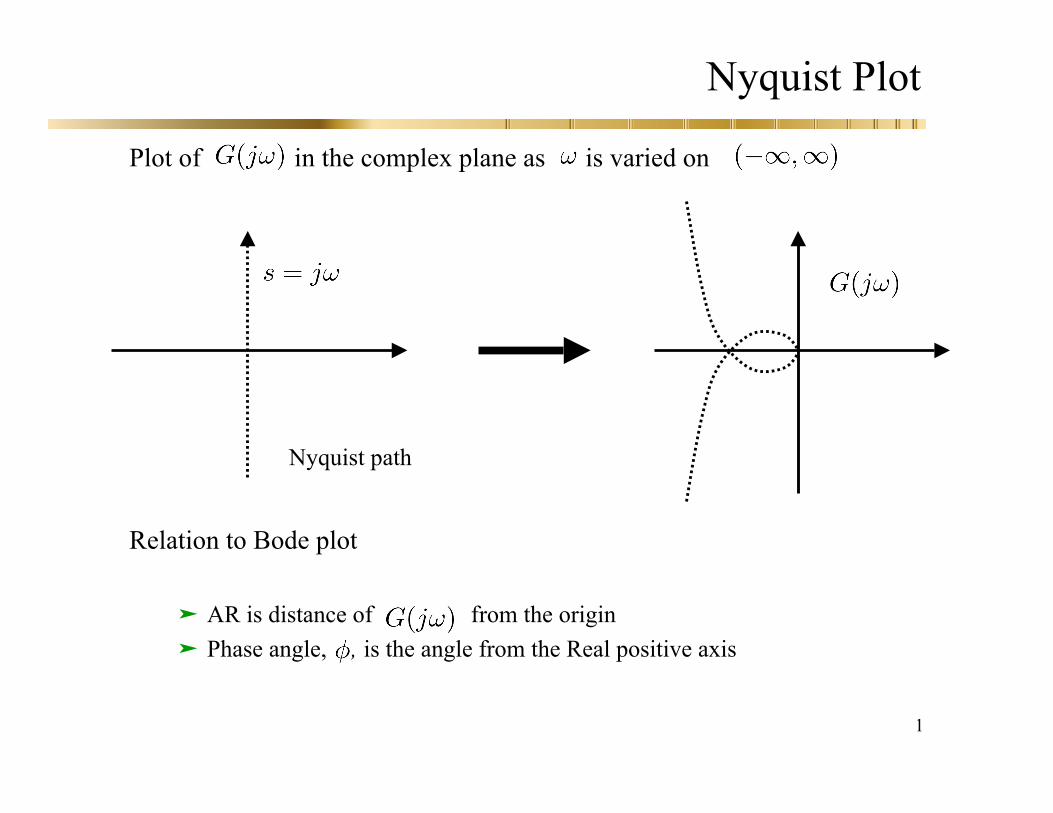
Nyquist Nyquist PlotPlot
First order systemFirst order system
3
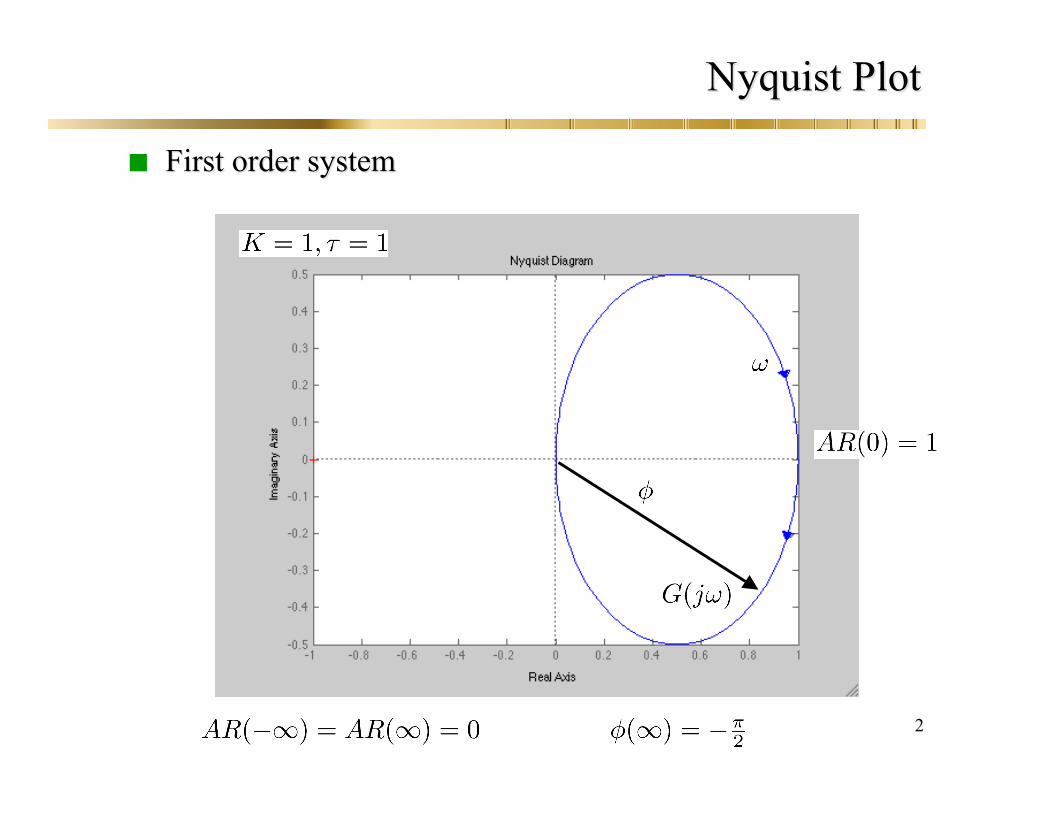
Nyquist Nyquist plotplot
Second order processSecond order process
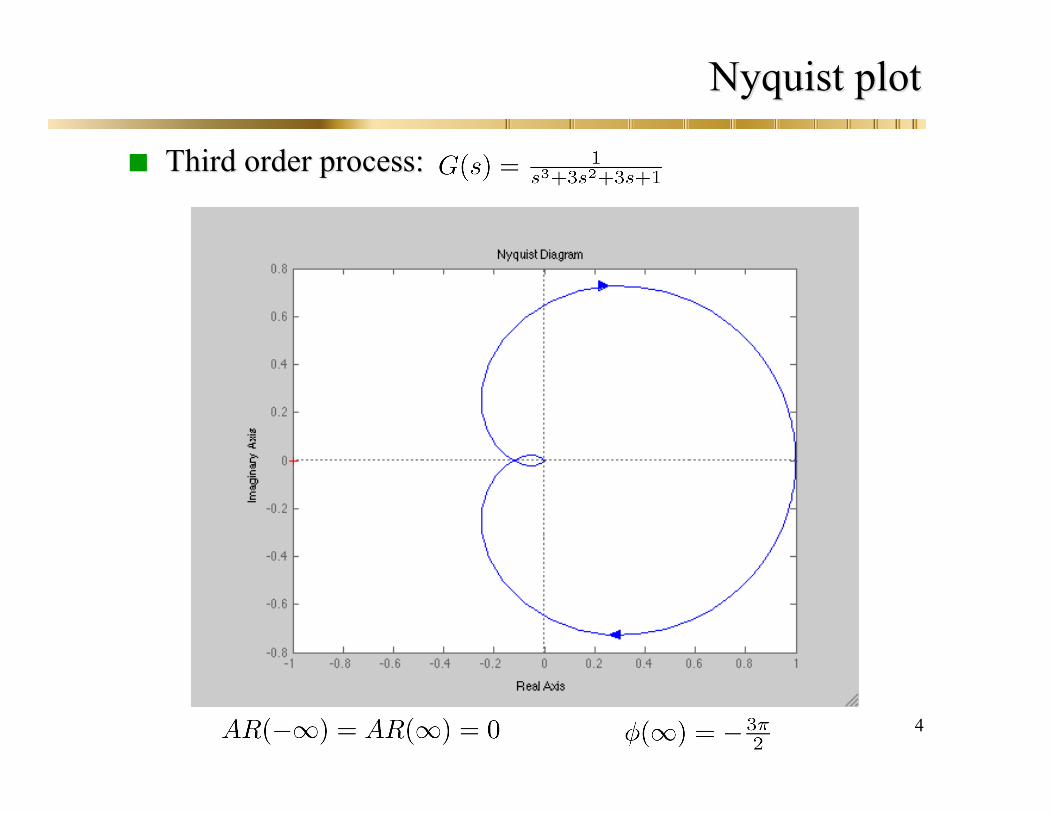
4
Nyquist Nyquist plotplot
Third order process:Third order process:
5
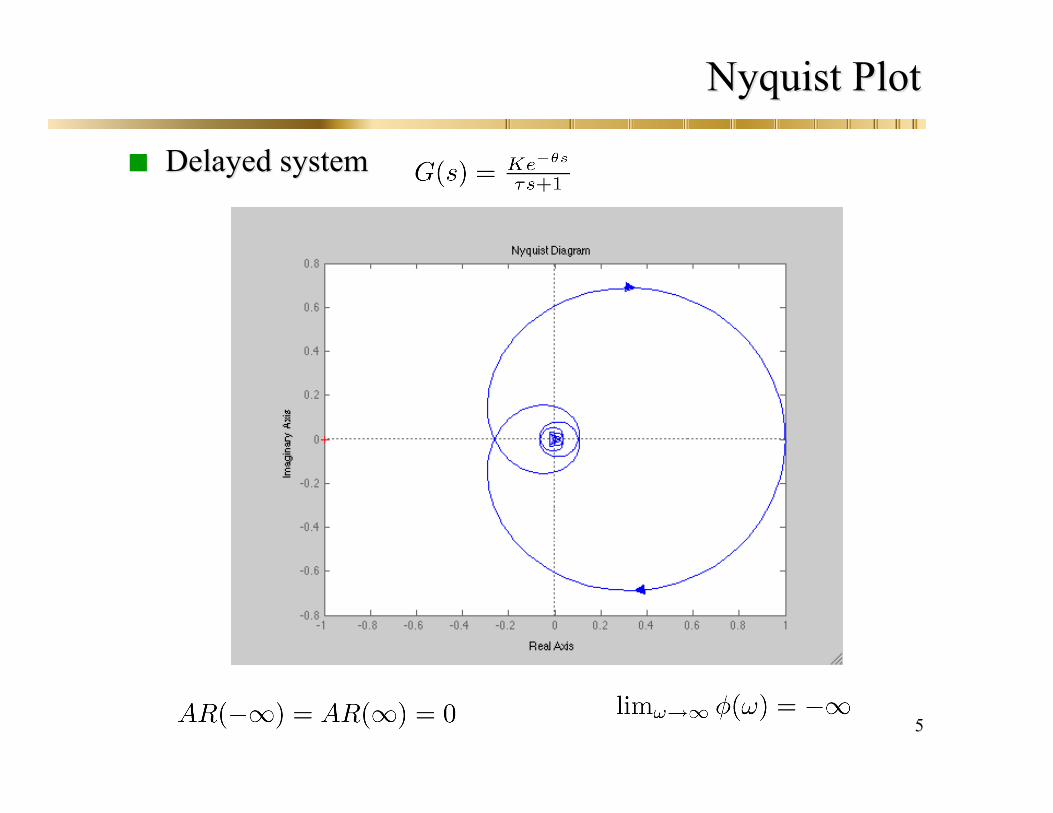
Nyquist Nyquist PlotPlot
Delayed systemDelayed system
6
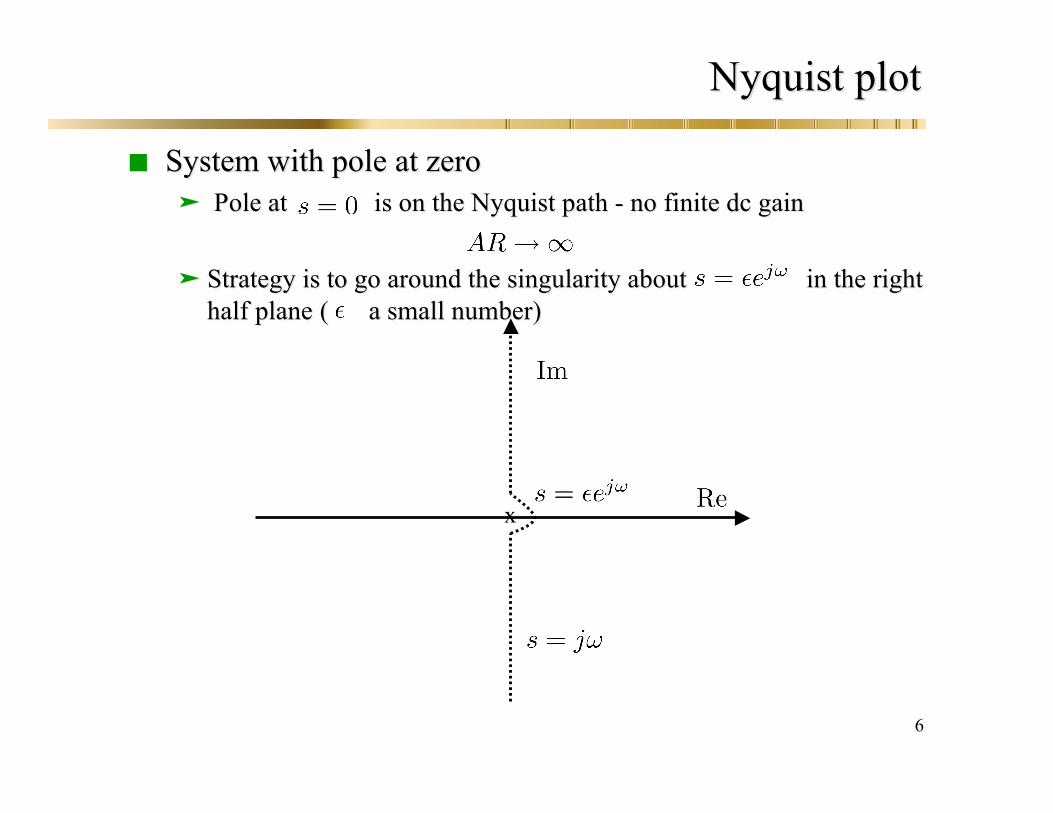
Nyquist Nyquist plotplot
System withSystem with pole at zeropole at zero Pole atPole at is on the is on the Nyquist Nyquist path - no finite dc gainpath - no finite dc gain
Strategy is to go around the singularity aboutStrategy is to go around the singularity about in the rightin the righthalf planehalf plane ( a small number)( a small number)
x
7
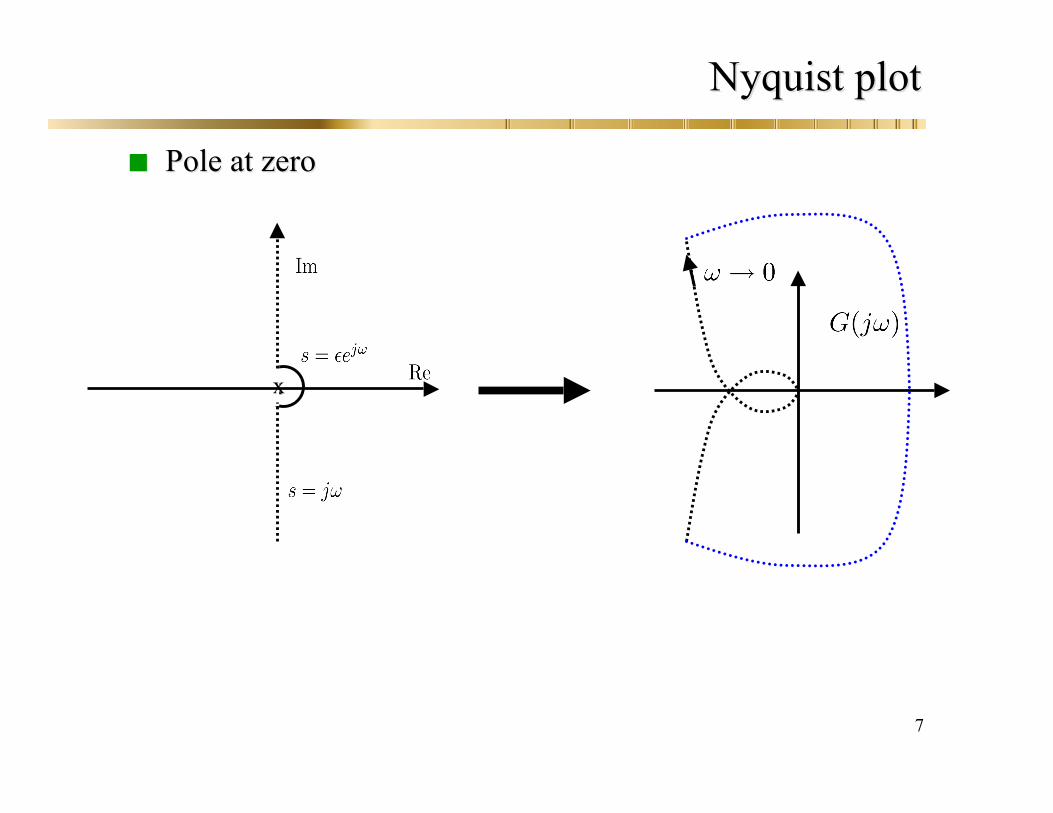
Nyquist Nyquist plotplot
Pole at zeroPole at zero
xx
8
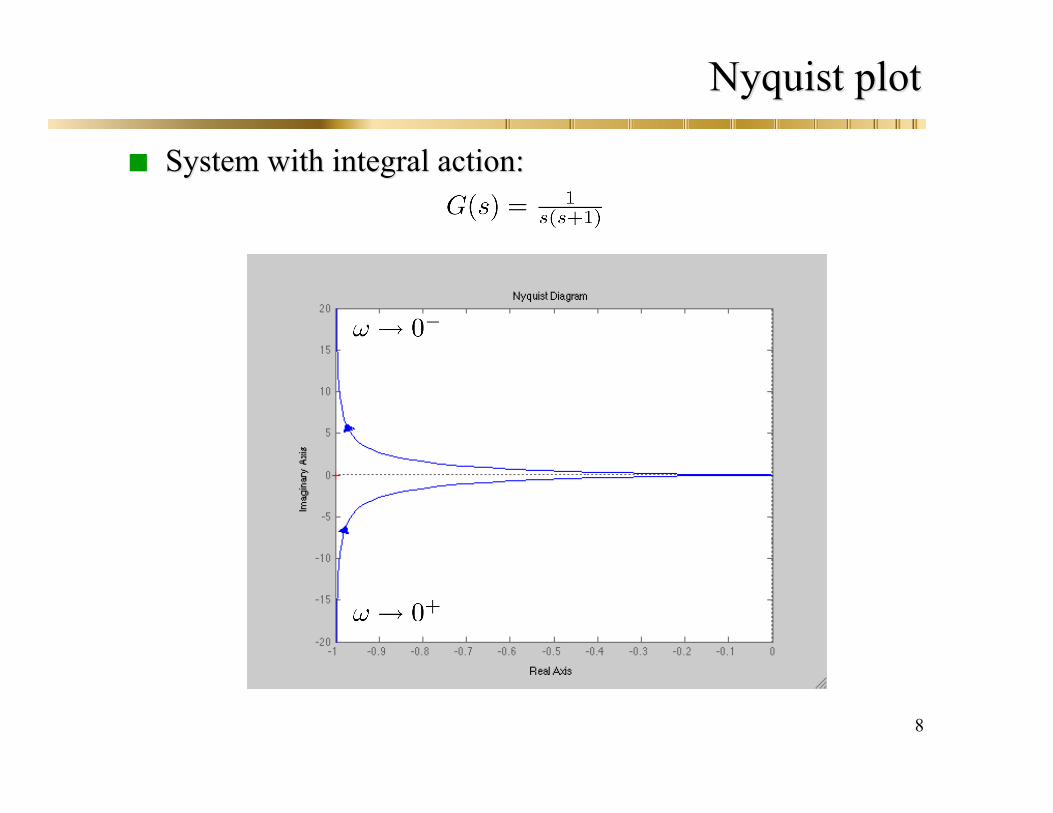
Nyquist Nyquist plotplot
System with integral action:System with integral action:
9
Che 446: Process Dynamics andControl
Frequency DomainController Design
10
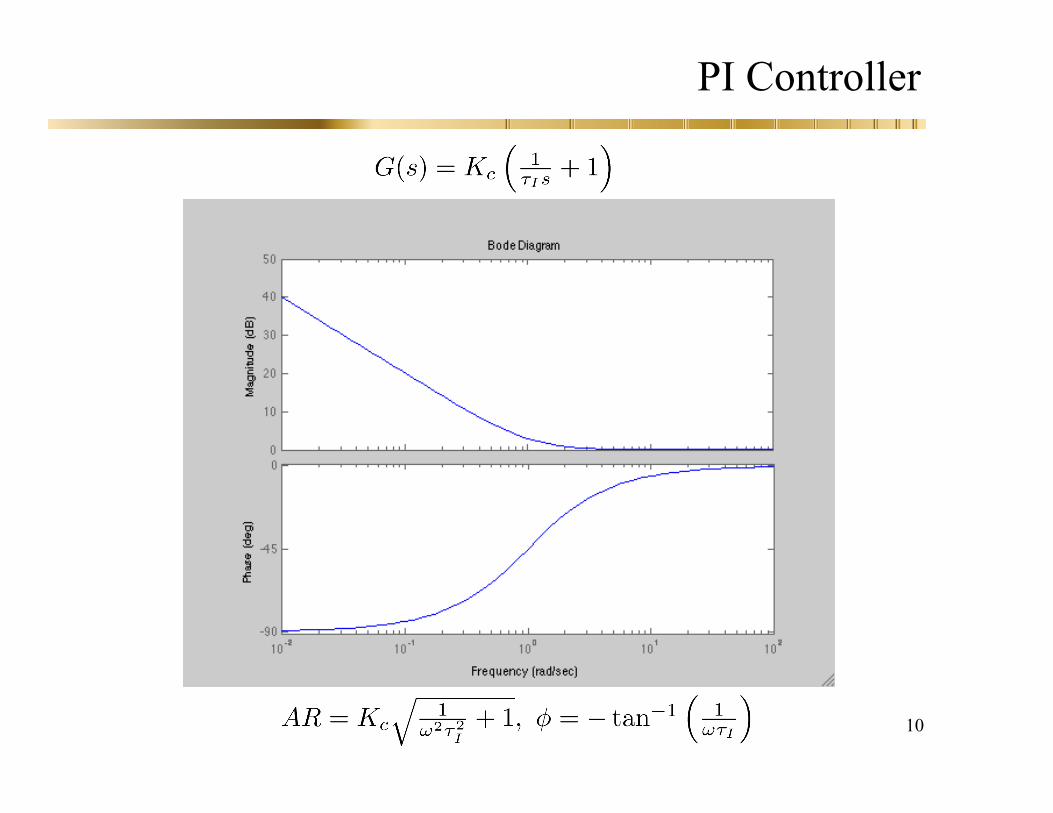
PI Controller
11
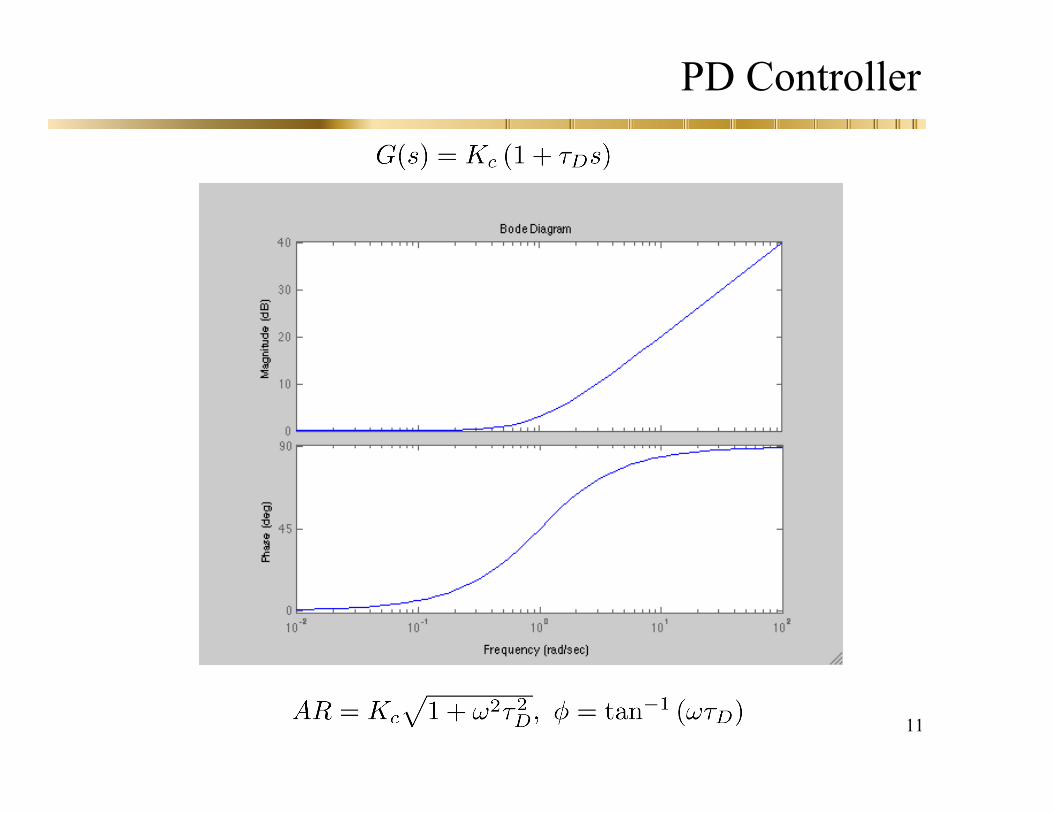
PD Controller
12
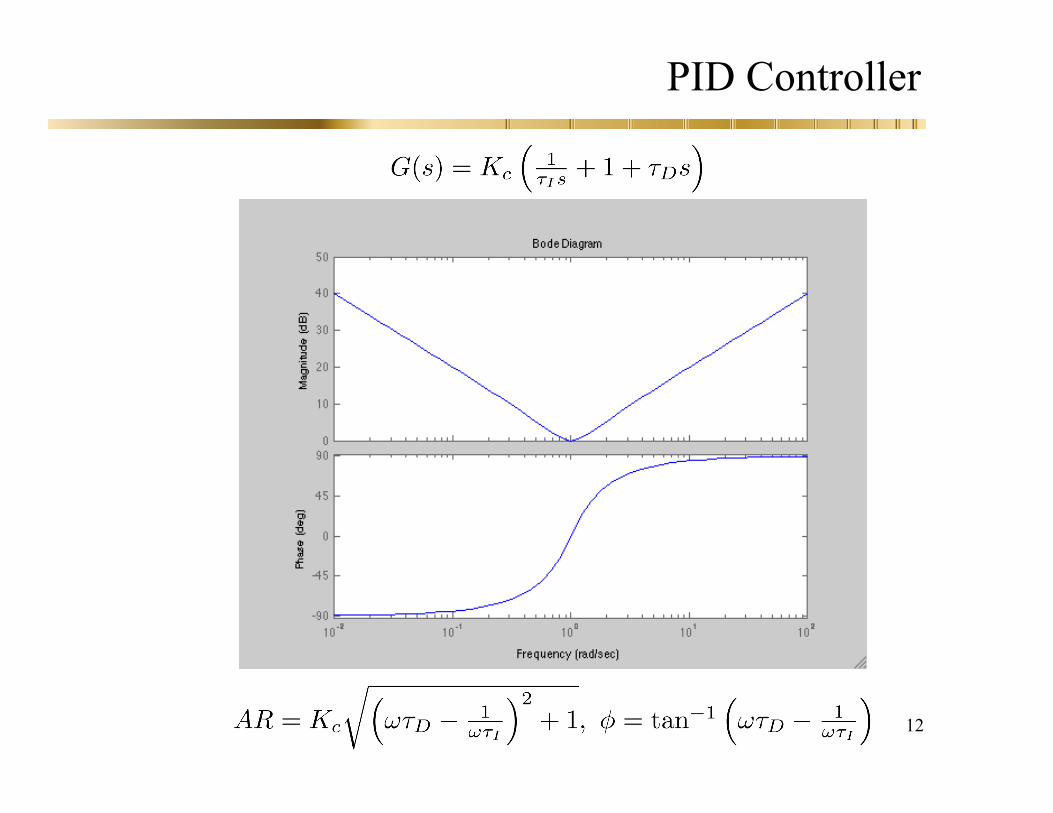
PID Controller
13
Bode Stability Criterion
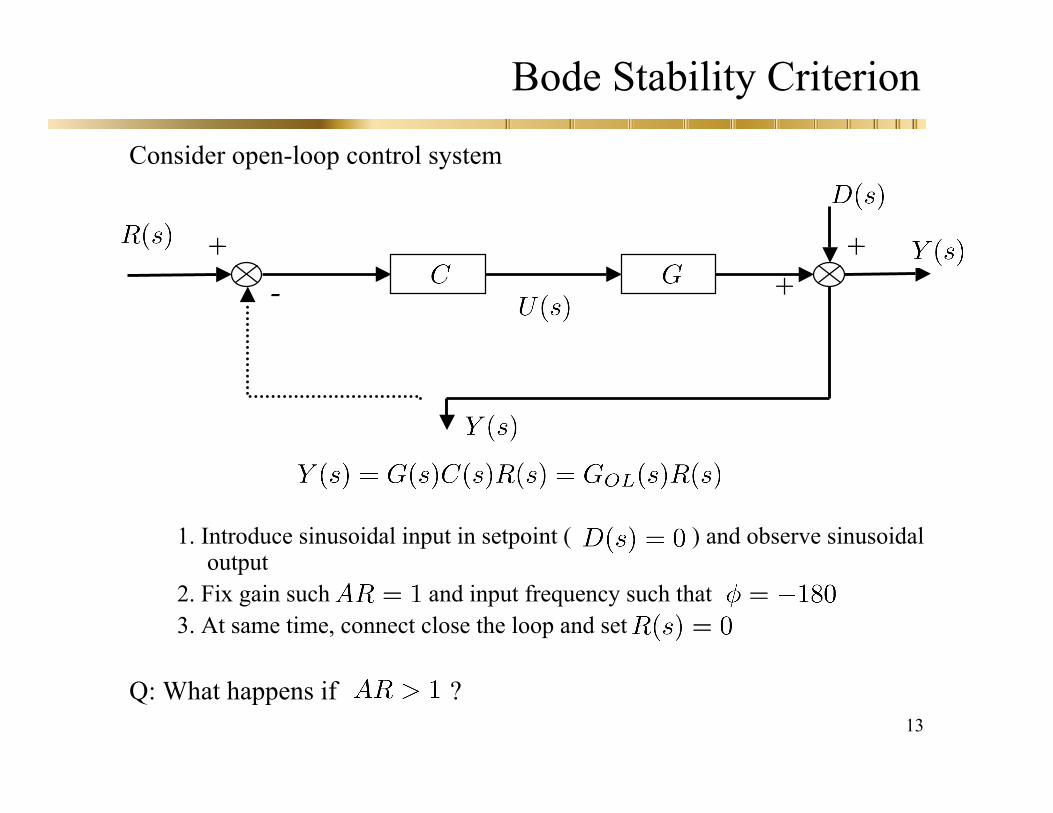
Consider open-loop control system
1. Introduce sinusoidal input in setpoint ( ) and observe sinusoidaloutput
2. Fix gain such and input frequency such that3. At same time, connect close the loop and set
Q: What happens if ?
+-++
14
Bode Stability Criterion
“A closed-loop system is unstable if the frequency of theresponse of the open-loop GOL has an amplitude ratiogreater than one at the critical frequency. Otherwise it isstable. “
Strategy:
1. Solve for ω in
2. Calculate AR
15
Bode Stability Criterion
To check for stability:
1. Compute open-loop transfer function2. Solve for ω in φ=-π3. Evaluate AR at ω4. If AR>1 then process is unstable
Find ultimate gain:
1. Compute open-loop transfer function without controller gain2. Solve for ω in φ=-π3. Evaluate AR at ω4. Let K
ARcu =1
16
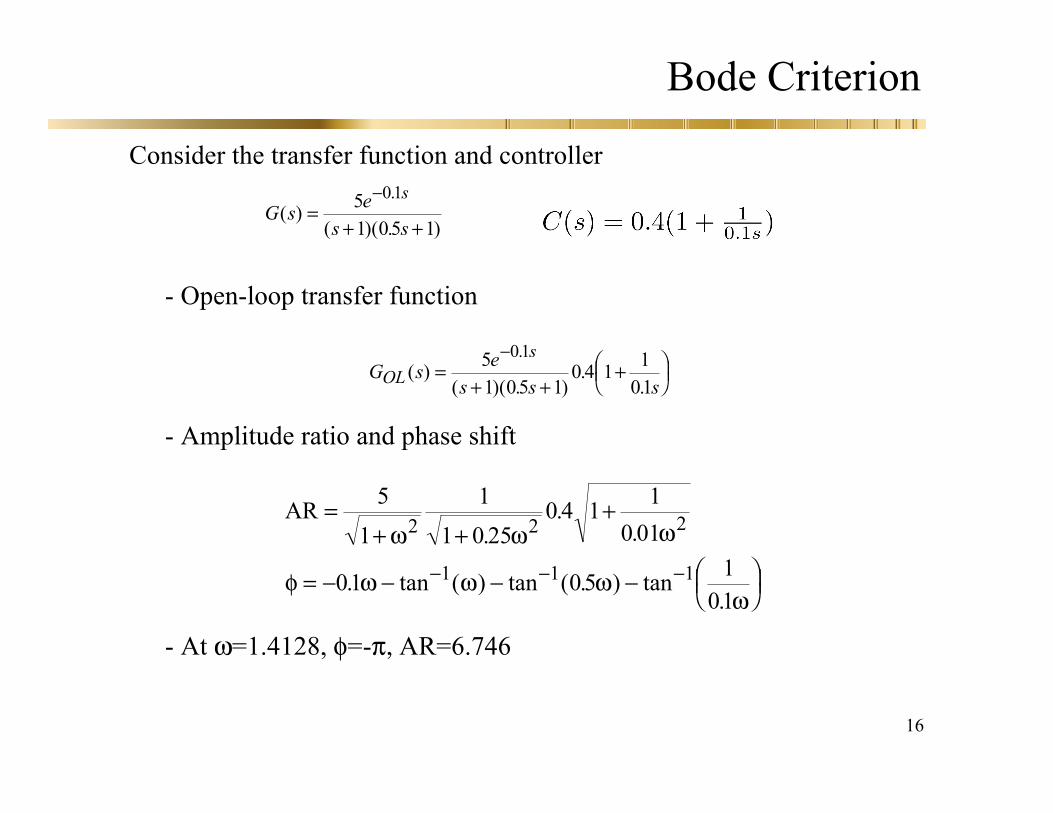
Bode Criterion
Consider the transfer function and controller
- Open-loop transfer function
- Amplitude ratio and phase shift
- At ω=1.4128, φ=-π, AR=6.746
G s es s
s( )
( )( . )
.=
+ +
!51 05 1
01
G s es s sOL
s( )
( )( . ).
.
.=
+ ++!
"#$%&
'51 05 1
0 4 1 101
01
AR =+ +
+
= ! ! ! ! "#$
%&'
! ! !
5
1
1
1 0 250 4 1 1
0 01
01 05 101
2 2 2
1 1 1
( ( (
) ( ( ((
..
.
. tan ( ) tan ( . ) tan.

17
Bode CriterionBode Criterion
18
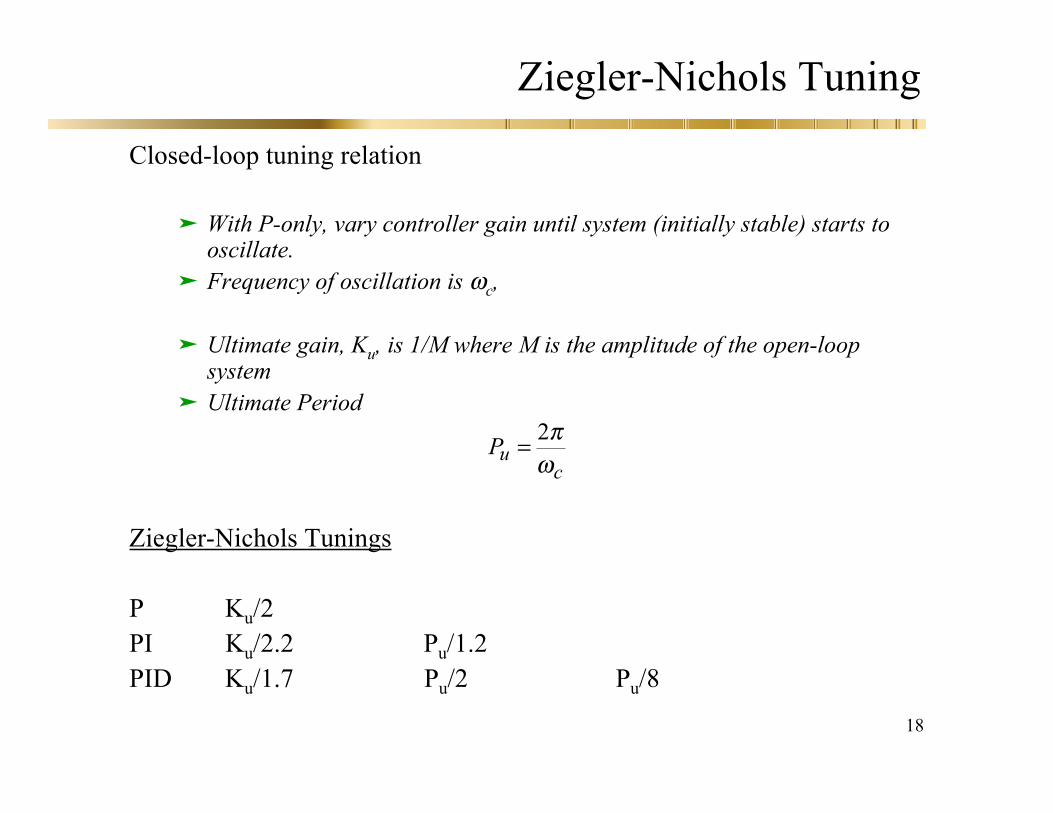
Ziegler-Nichols Tuning
Closed-loop tuning relation
With P-only, vary controller gain until system (initially stable) starts tooscillate.
Frequency of oscillation is ωc,
Ultimate gain, Ku, is 1/M where M is the amplitude of the open-loopsystem
Ultimate Period
Ziegler-Nichols Tunings
P Ku/2PI Ku/2.2 Pu/1.2PID Ku/1.7 Pu/2 Pu/8
Puc
= 2!"
19
Bode Stability CriterionBode Stability Criterion
Using Bode plots,Using Bode plots, easy criterion to verify for closed-loopeasy criterion to verify for closed-loopstabilitystability More general than polynomial criterion such as More general than polynomial criterion such as Routh Routh Array,Array,
DirectDirect Substitution,Substitution, Root locusRoot locus
Applies to delay systems without approximationApplies to delay systems without approximation
Does not require explicit computation of closed-loop polesDoes not require explicit computation of closed-loop poles
Requires that a unique frequency yield phase shift of -180 degrees Requires that a unique frequency yield phase shift of -180 degrees
Requires monotonically decreasingRequires monotonically decreasing phase shiftphase shift
20
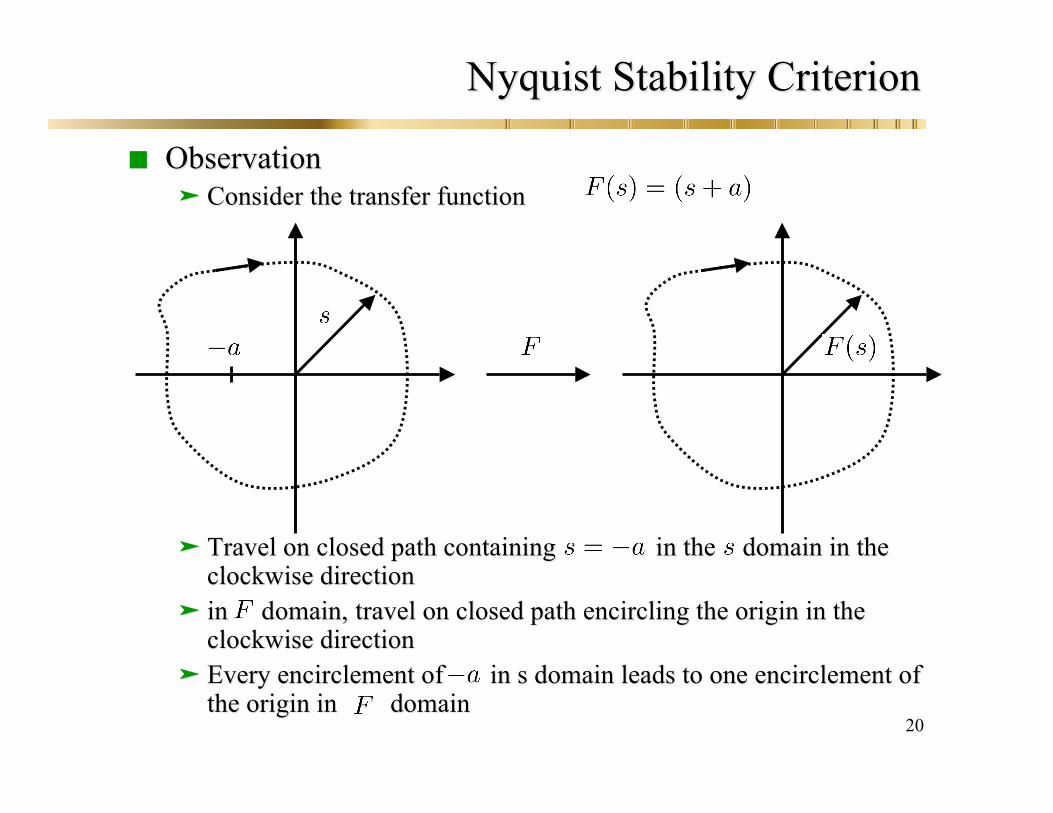
Nyquist Nyquist Stability CriterionStability Criterion
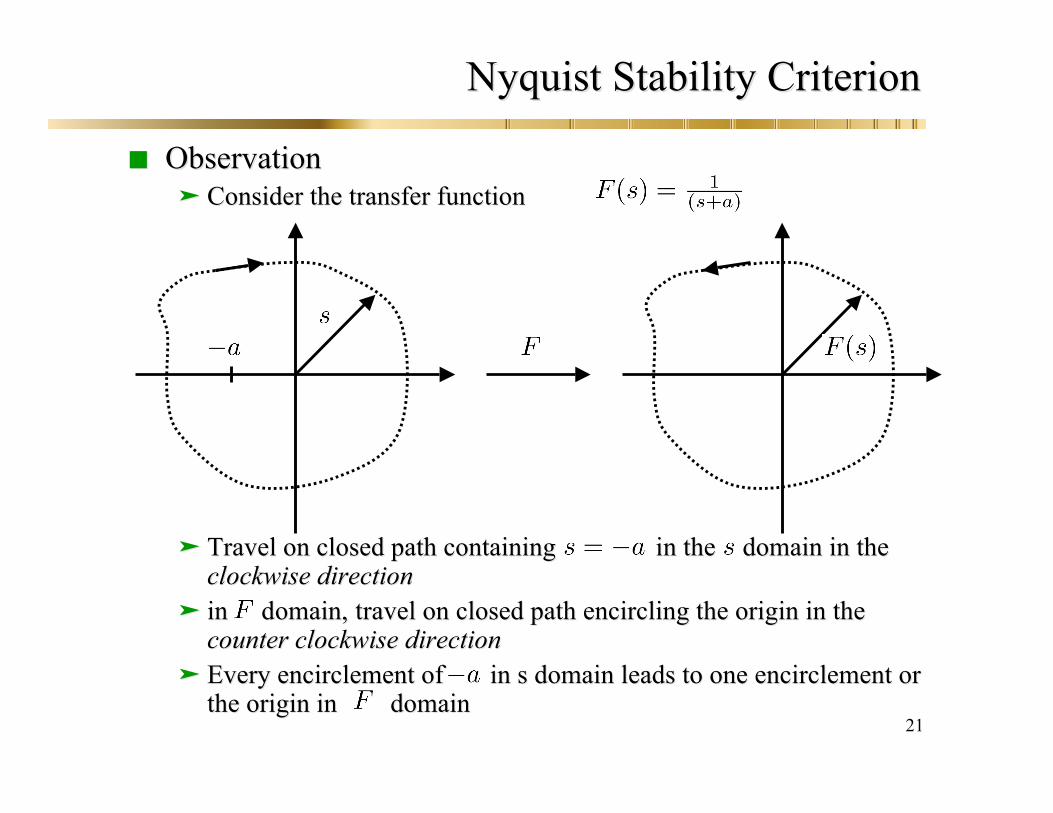
ObservationObservation Consider the transfer functionConsider the transfer function
Travel on closed path containingTravel on closed path containing in thein the domain in the domain in theclockwise directionclockwise direction
inin domain,domain, travel on closed path encircling the origin in thetravel on closed path encircling the origin in theclockwise directionclockwise direction
Every encirclement of Every encirclement of in s domain leads to one encirclement ofin s domain leads to one encirclement ofthe origin in domainthe origin in domain
21
Nyquist Nyquist Stability CriterionStability Criterion
ObservationObservation Consider the transfer functionConsider the transfer function
Travel on closed path containingTravel on closed path containing in thein the domain in the domain in theclockwise directionclockwise direction
inin domain,domain, travel on closed path encircling the origin in thetravel on closed path encircling the origin in thecounter clockwisecounter clockwise directiondirection
Every encirclement of Every encirclement of in s domain leads to one encirclement orin s domain leads to one encirclement orthe origin inthe origin in domaindomain
22
Nyquist Nyquist Stability CriterionStability Criterion
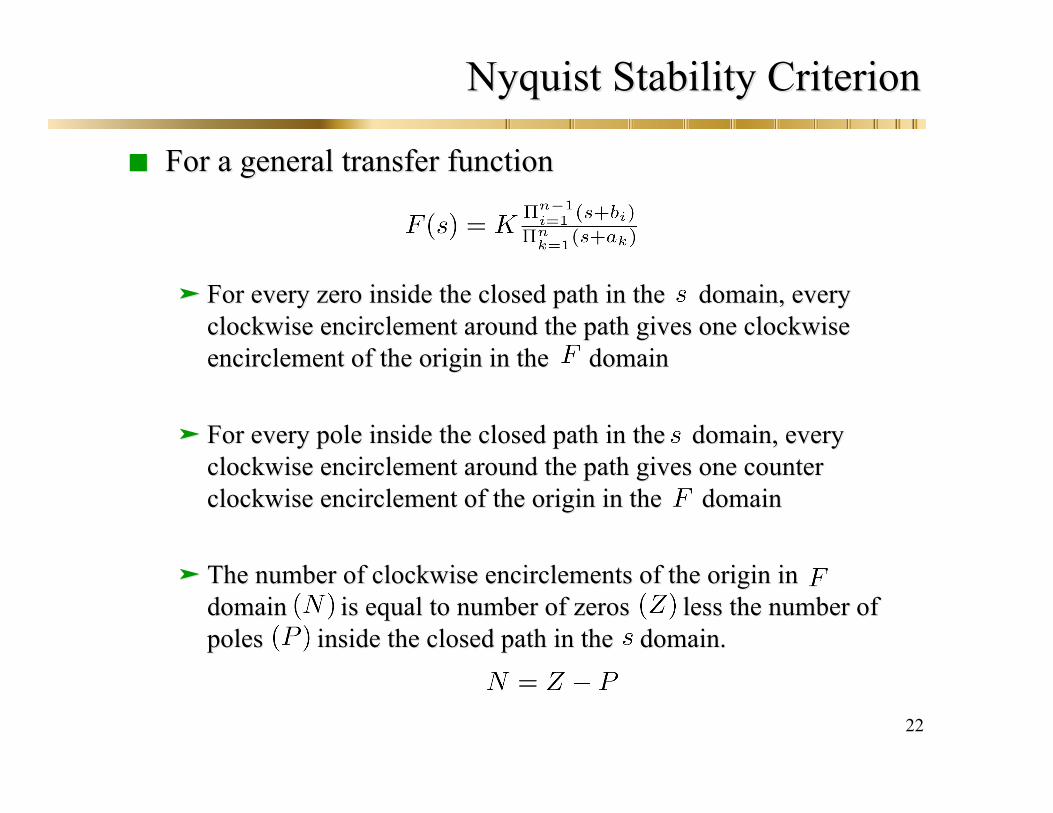
For a general transfer functionFor a general transfer function
For every zero inside the closed path in theFor every zero inside the closed path in the domain, every domain, everyclockwise encirclement around the path gives one clockwiseclockwise encirclement around the path gives one clockwiseencirclement of the origin in theencirclement of the origin in the domaindomain
For every pole inside the closed path in theFor every pole inside the closed path in the domain, everydomain, everyclockwise encirclement around the path gives one counterclockwise encirclement around the path gives one counterclockwise encirclement of the origin in theclockwise encirclement of the origin in the domaindomain
The number of clockwise encirclements of the origin inThe number of clockwise encirclements of the origin indomaindomain is equal to number of zerosis equal to number of zeros less the number ofless the number ofpolespoles inside the closed path in the inside the closed path in the domain. domain.
23
Nyquist Nyquist Stability CriterionStability Criterion
To assess closed-loop stability:To assess closed-loop stability: Need to identify unstable poles of the closed-loop systemNeed to identify unstable poles of the closed-loop system
That is, the number of poles in the RHPThat is, the number of poles in the RHP
Consider the transfer functionConsider the transfer function
Poles of the closed-loop system are the zeros ofPoles of the closed-loop system are the zeros of

24
Nyquist Nyquist Stability CriterionStability Criterion
PathPath of interest in the domain must encircle the entireof interest in the domain must encircle the entireRHPRHP
• Travel around a half semi-circle or radius that encircles the entire RHP• For a proper transfer function
• Every point on the arc of radius are such that
collapse to a single point in domain
25
Nyquist Nyquist Stability CriterionStability Criterion
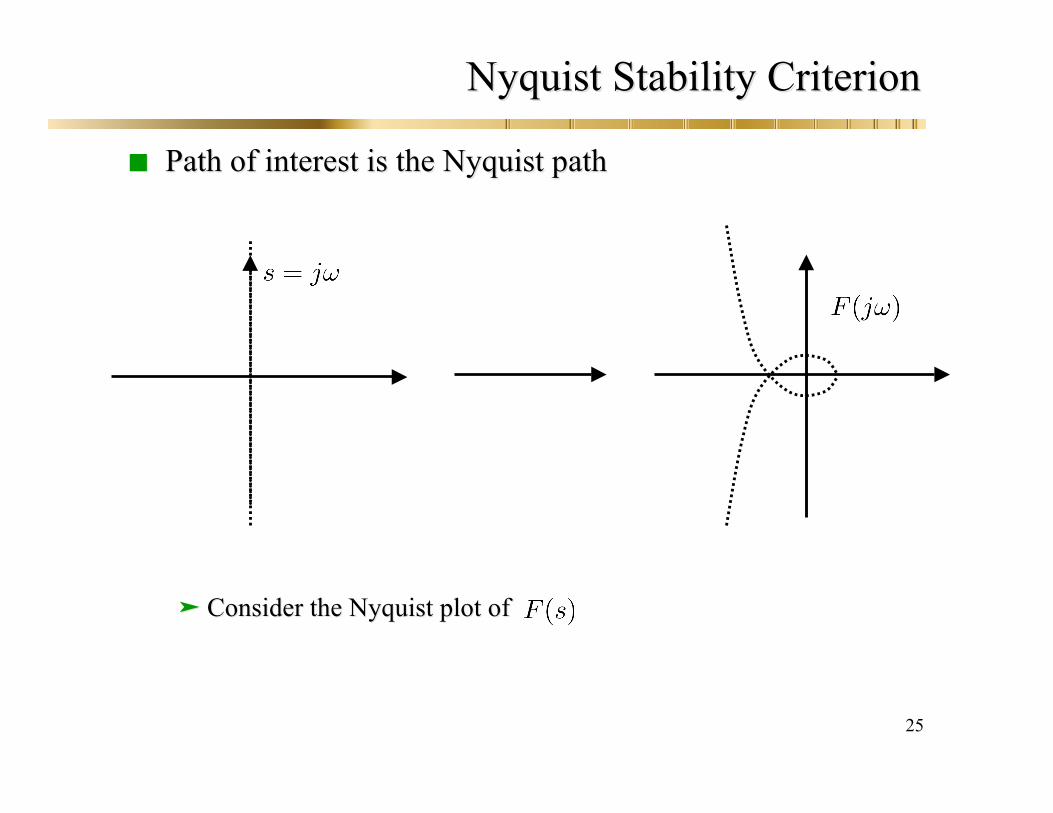
Path of interest is the Path of interest is the Nyquist Nyquist pathpath
Consider the Consider the Nyquist Nyquist plot ofplot of
26
Nyquist Nyquist Stability CriterionStability Criterion
Compute the poles ofCompute the poles of
AssumeAssume thatthat it has it has unstable polesunstable poles
Count the number of clockwise encirclements of the origin of theCount the number of clockwise encirclements of the origin of theNyquist Nyquist plot ofplot of Assume that itAssume that it makes makes clockwise encirclementsclockwise encirclements
The number of unstable zeros of The number of unstable zeros of (the number of unstable(the number of unstablepoles of poles of the closed-loop system)the closed-loop system)
Therefore the closed-loop system is unstableTherefore the closed-loop system is unstable ifif
27
Nyquist Nyquist Stability CriterionStability Criterion
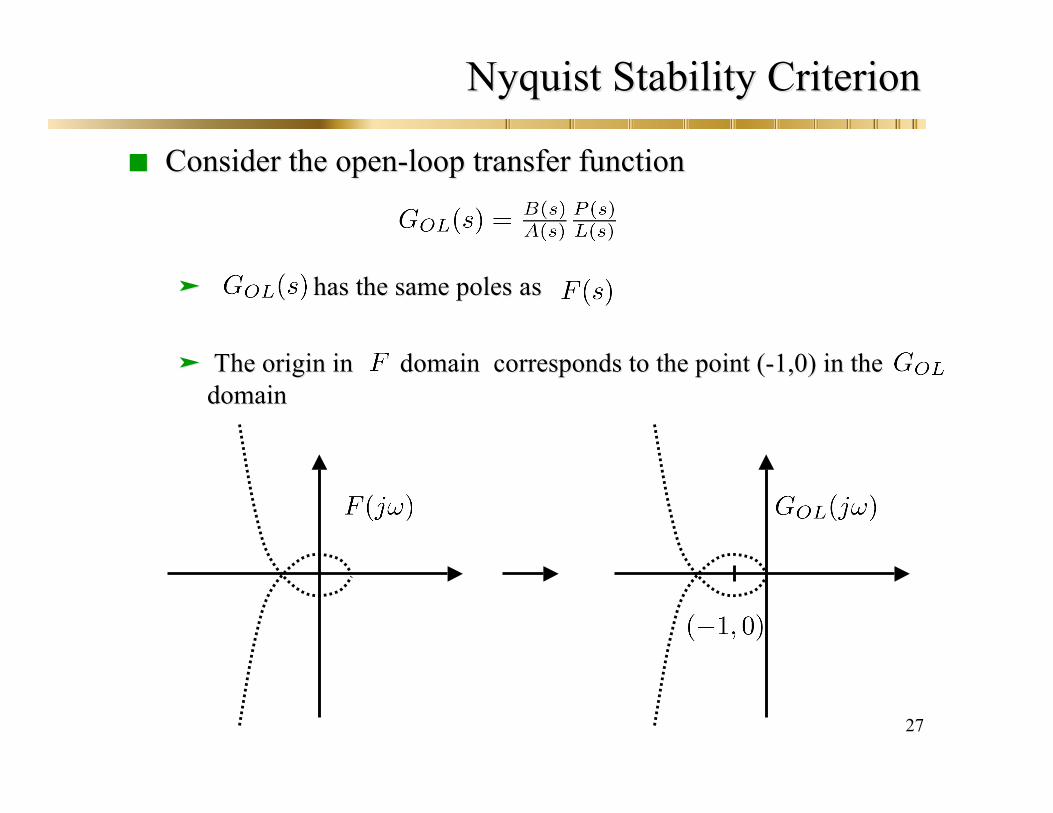
ConsiderConsider the open-loop transfer functionthe open-loop transfer function
has the same poleshas the same poles asas
The origin inThe origin in domaindomain corresponds to the point (-1,0) in thecorresponds to the point (-1,0) in thedomaindomain
28
Nyquist Nyquist StabilityStability
In terms of theIn terms of the open-loop transfer functionopen-loop transfer function
The number of polesThe number of poles ofof givesgives
The number of clockwise encirclements ofThe number of clockwise encirclements of (-1,0)(-1,0) ofofgives the number of clockwise encirclements of the origingives the number of clockwise encirclements of the origin ofof
The number of unstable polesThe number of unstable poles of the closed-loop system is givenof the closed-loop system is givenbyby
29
Nyquist Stability Criterion
“If N is the number of times that the Nyquist plot encircles the point (-1,0) in the complex plane in the clockwise direction, and P is thenumber of open-loop poles of GOL that lie in the right-half plane, thenZ=N+P is the number of unstable poles of the closed-loopcharacteristic equation.”
Strategy
1. Compute the unstables poles of2. Substitute s=jω in GOL(s)3. Plot GOL(jω) in the complex plane4. Count encirclements of (-1,0) in the clockwise direction
30
Nyquist Criterion
Consider the transfer function
and the PI controller
The open-loop transfer function is
No unstable polesOne pole on the Nyquist path (must go around small circle around
the origin in the right half plane)
31
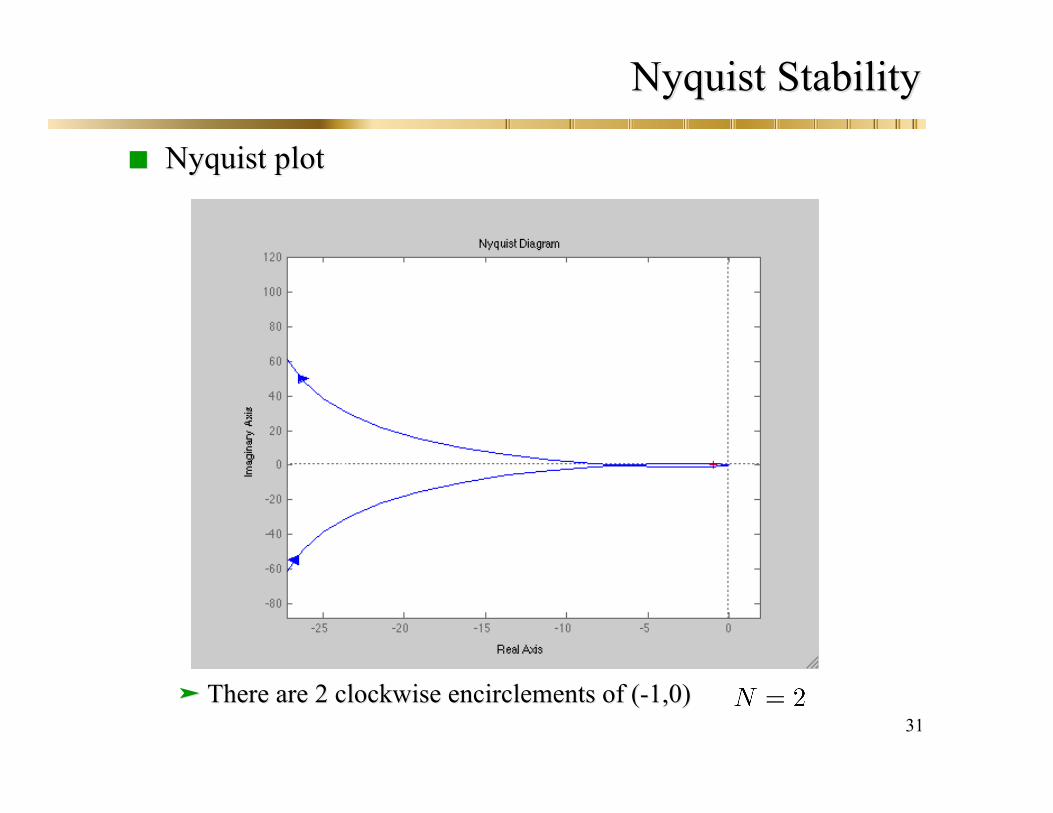
Nyquist Nyquist StabilityStability
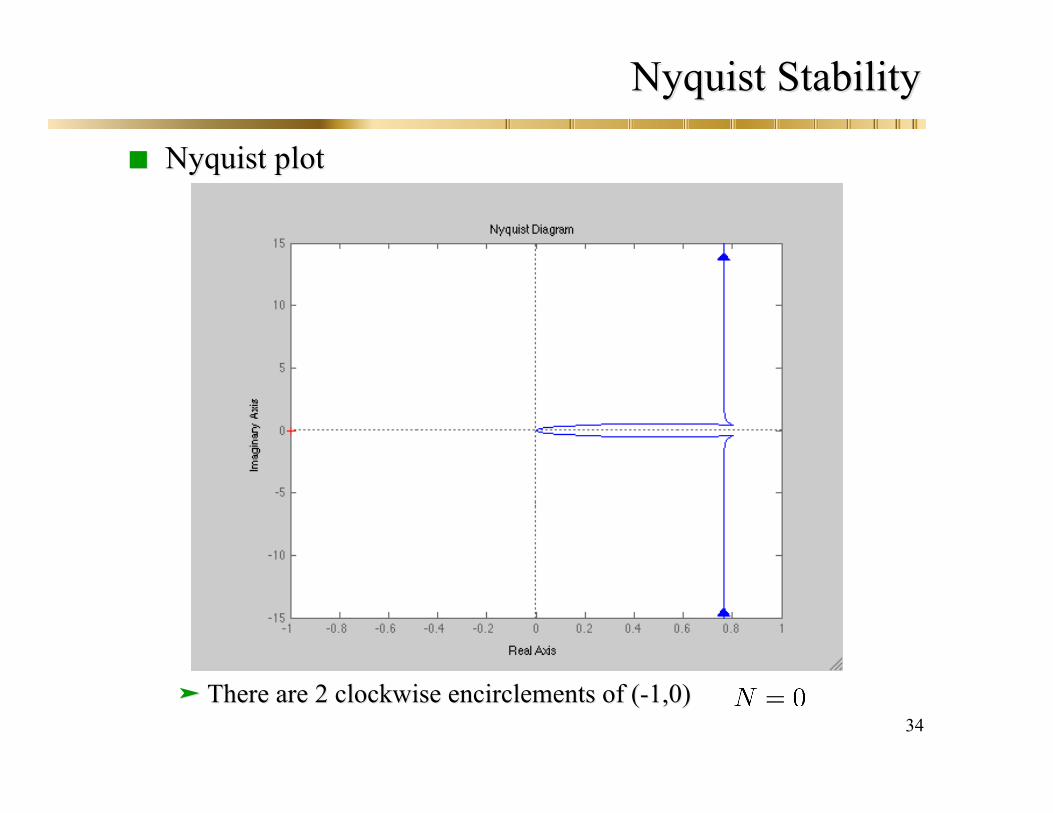
Nyquist Nyquist plotplot
There are 2 clockwise encirclements of (-1,0)There are 2 clockwise encirclements of (-1,0)
32
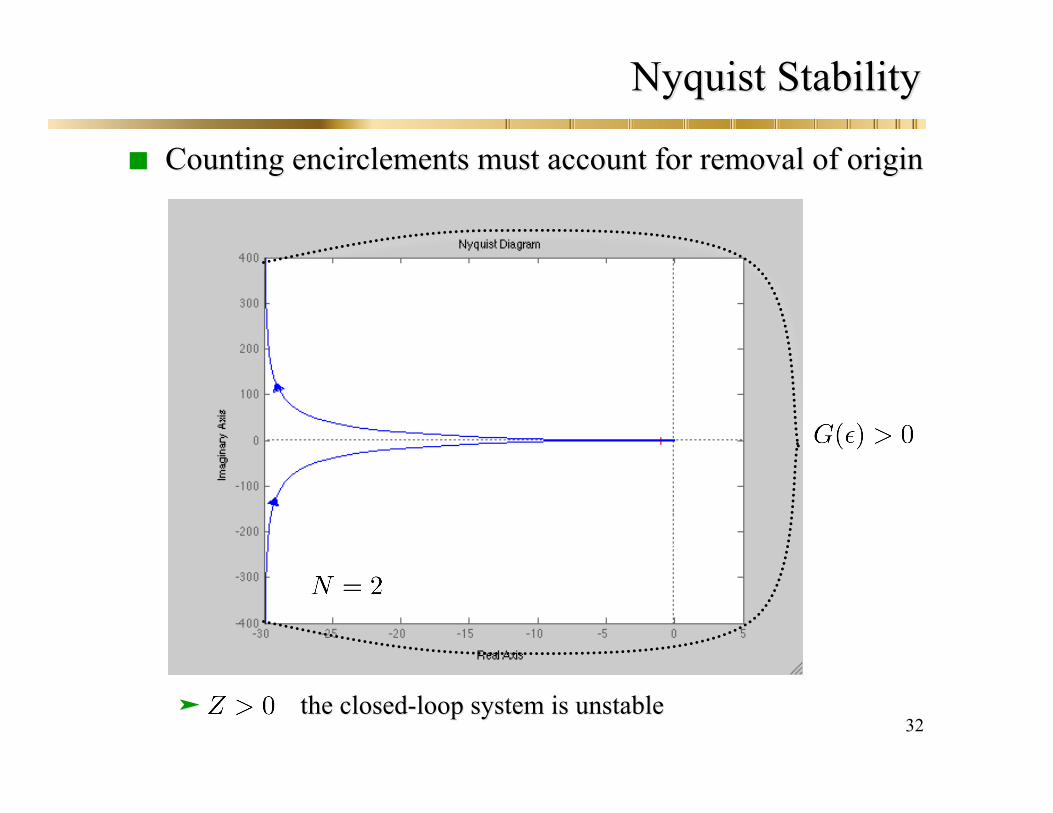
Nyquist Nyquist StabilityStability
Counting encirclements must account for removal of originCounting encirclements must account for removal of origin
the closed-loop system is unstablethe closed-loop system is unstable
33
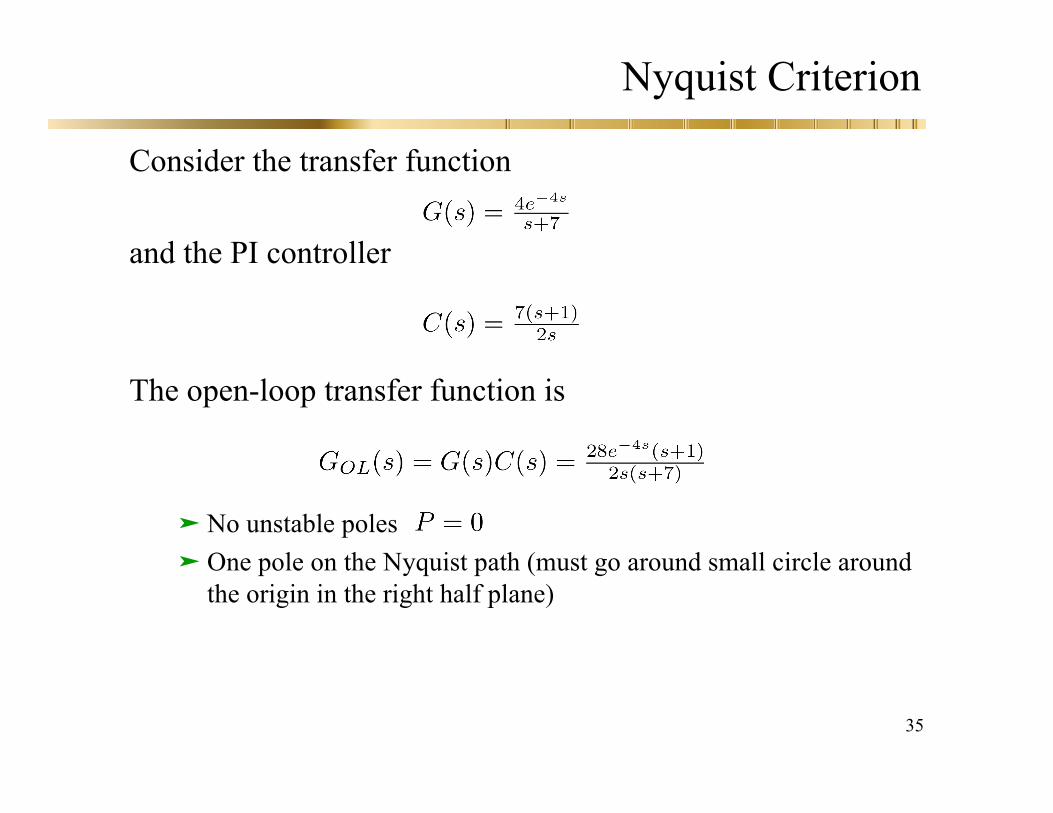
Nyquist Criterion
Consider the transfer function
and the PI controller
The open-loop transfer function is
No unstable polesOne pole on the Nyquist path (must go around small circle around
the origin in the right half plane)
34
Nyquist Nyquist StabilityStability
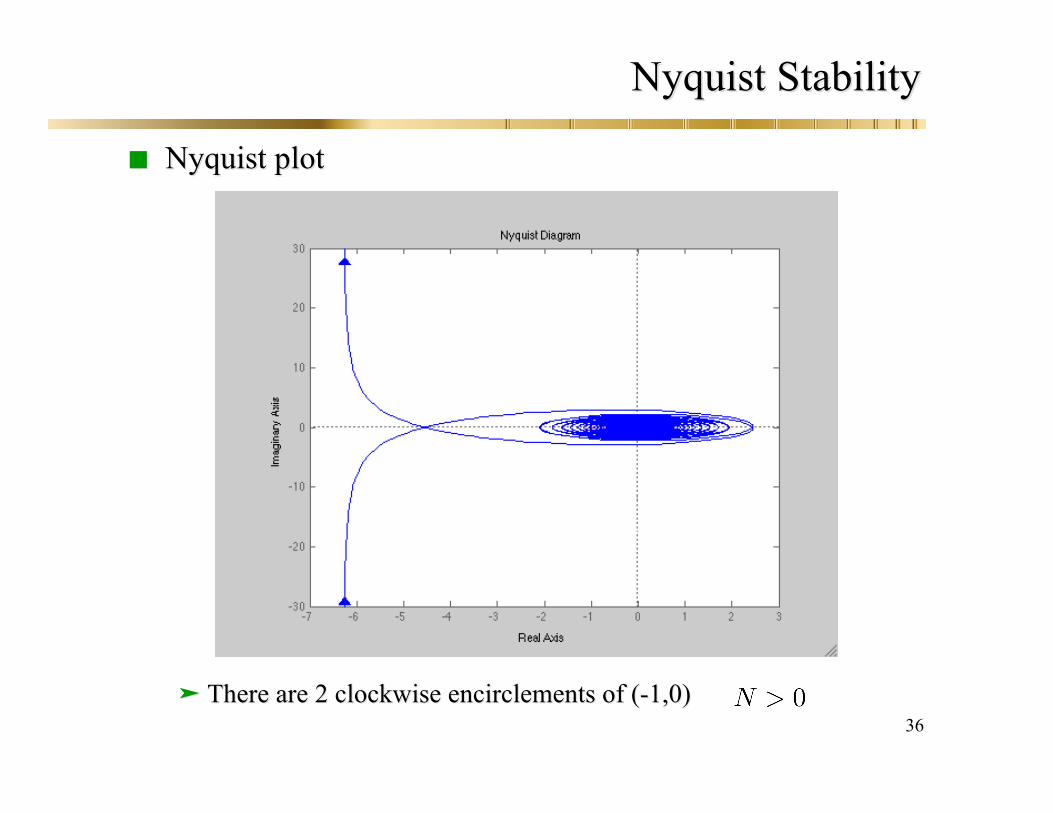
Nyquist Nyquist plotplot
There are 2 clockwise encirclements of (-1,0)There are 2 clockwise encirclements of (-1,0)
35
Nyquist Criterion
Consider the transfer function
and the PI controller
The open-loop transfer function is
No unstable polesOne pole on the Nyquist path (must go around small circle around
the origin in the right half plane)
36
Nyquist Nyquist StabilityStability
Nyquist Nyquist plotplot
There are 2 clockwise encirclements of (-1,0)There are 2 clockwise encirclements of (-1,0)
37
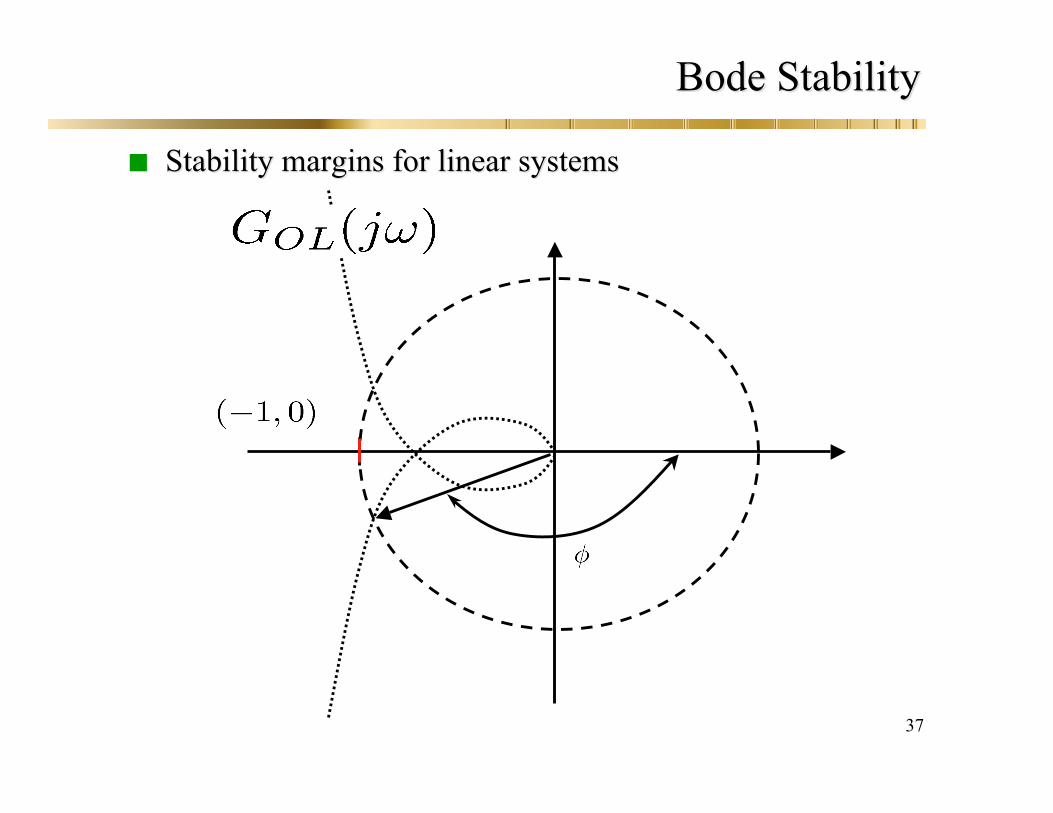
Bode StabilityBode Stability
Stability margins for linear systemsStability margins for linear systems
38
Stability Considerations
Control is about stability
Considered exponential stability of controlled processes using: Routh criterion Direct Substitution Root Locus Bode Criterion (Restriction on phase angle) Nyquist Criterion
Nyquist is most general but sometimes difficult to interpret
Roots, Bode and Nyquist all in MATLAB
Polynomial (no dead-time)
39
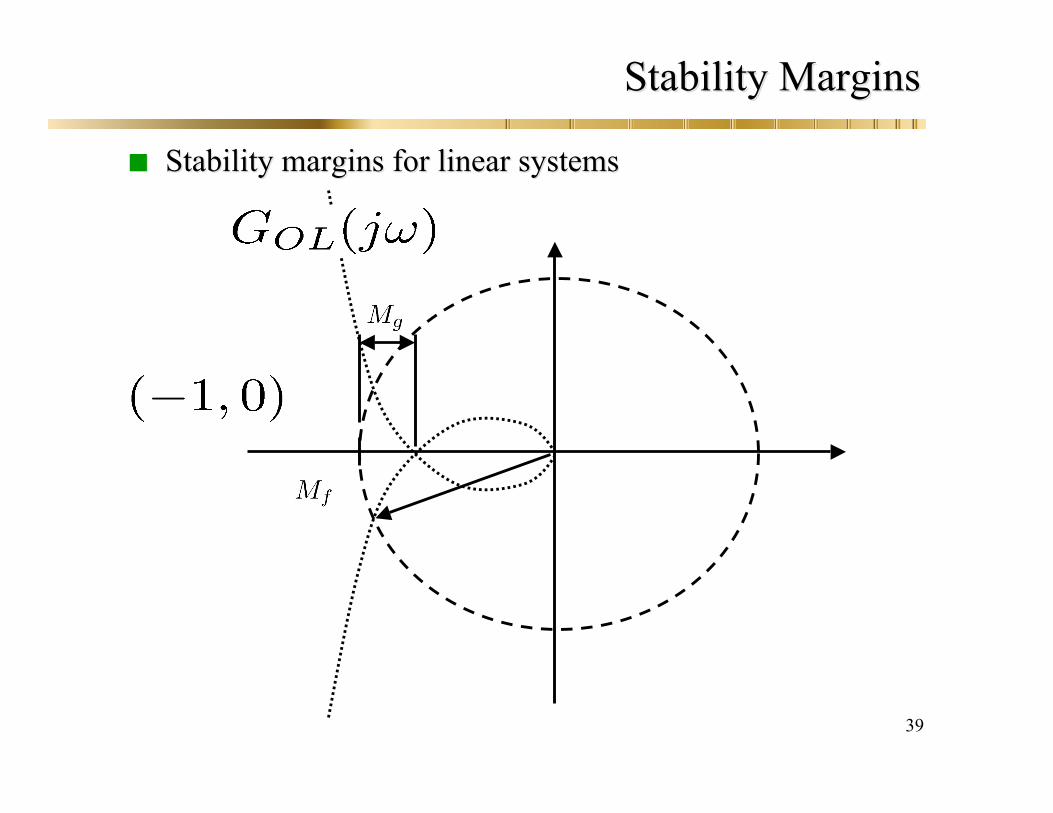
Stability MarginsStability Margins
Stability margins for linear systemsStability margins for linear systems
40
Stability MarginsStability Margins
Gain margin:Gain margin: LetLet be the amplitude ratio ofbe the amplitude ratio of at the criticalat the critical
frequencyfrequency
Phase margin:Phase margin: LetLet be the phase shift ofbe the phase shift of at the frequency whereat the frequency where
41
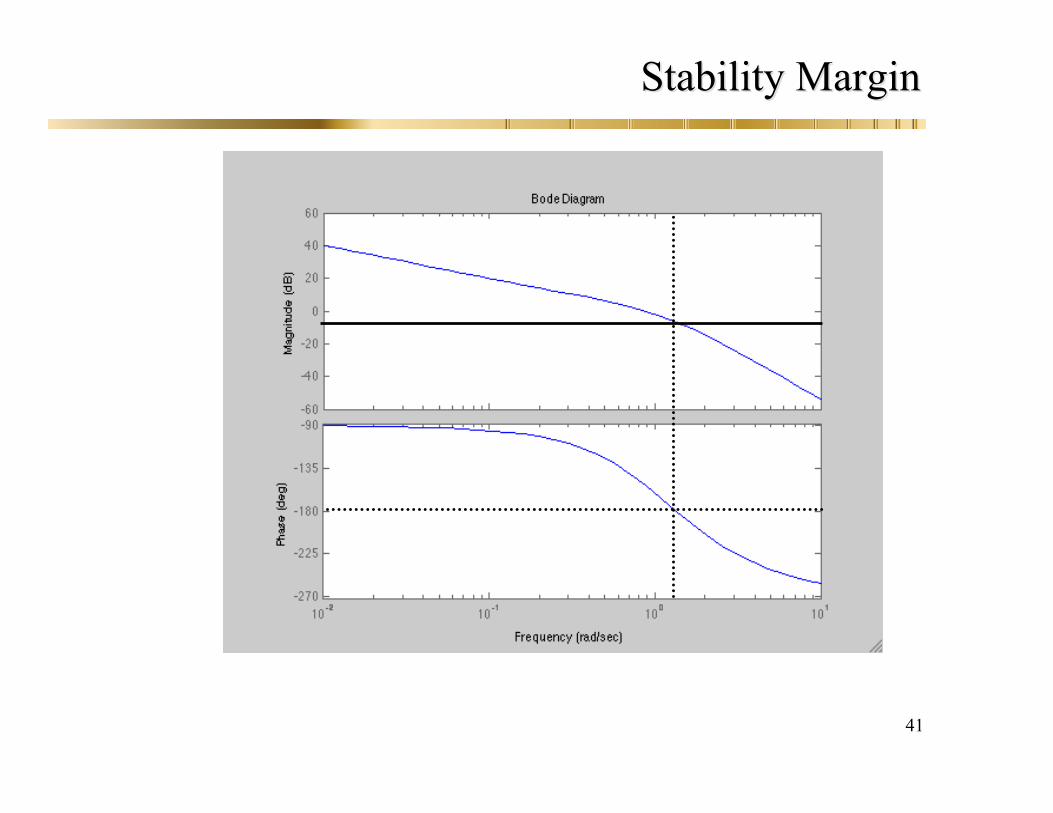
Stability MarginStability Margin