Embed Size (px)
DESCRIPTION
Chapter16 Methodology: How to Model and Simulate. M&S Methodology. First think about your objectives- find a level of difficulty that seems achievable in the time available. Develop the experimental frames first to meet these objectives. - PowerPoint PPT Presentation
Citation preview

Chapter16 Methodology: How to Model and Simulate

M&S Methodology• First think about your objectives- find a level of difficulty that seems achievable in the time
available.
• Develop the experimental frames first to meet these objectives.
• Develop your atomic models and coupled models and and test them in hierarchical stage wise fashion in SimView.
• Start your exploratory phase -- get some preliminary results of execution within experimental frames. What is the “lay of the land”? Which factors appear to matter most?
• Start your production runs (for final results) by concentrating on the factors that seem to be important from your initial exploration.
• If you need better performance, remove all unessential code, including output and print statements. Switch execution from SimView to fast-as-can simulation as shown next.
• For greater performance migrate your model to parallel/distributed fast-as-can simulation (not currently available).
• If your objectives were to develop real-time execution models, migrate them to real-time execution (distributed, non-distributed) as shown next.

Suggested Project Report Outline• Problem statement – Objectives of the Project
• General Description of the System to be Studied
• Objectives of the Modeling and Simulation Study
• The Simulation Model– System Entity Structure or Hierarchical diagrams and– explanation of operation– Illustrative DEVSJAVA code or pseudo code
• Experimental frame and how it serves to achieve the Objectives
• Experiments
• Results ( or expected results)
• Conclusions (what did you learn from this work
• Future Work
• References
• Appendix: more details or code

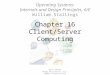
Non Distributed Distributed
Real-time SimView supports visual behavior validation. Using real-time simulation on a single workstation allows checking timing. Tunable real-time coordinator used by SimView allows speed as well.
Packages:•genDevs.modeling•genDevs.simulation•simView•genDevs.simulation.realtime
Only decentralized is currently available for distribution. Centralized available upon requirest.
Packages:•genDevs.simulation..distributed•genDevs.simulation.realtime
Fast-as-can
Packages:•genDevs.modeling•genDevs.simulation
Not available currently for distribution.
Available upon requirest.
centralized Decentralized
Atomic
federate
Coupled
Federate
Categorizing Simulation Modes and Packages in DEVSJAVA
Non threaded threaded

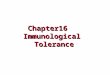
Model Development using Model Continuity
Modeling
Implementation/Logical
Simulation
Checks Model Logical Behavior
Model Distribution/Distributed Simulation
Checks Model Logical Behavior
in DistributedEnvironmentDEVS
Formalism
Real-TimeDistributed Simulation/Execution
Checks Model Temporal Behavior
genDevs.simulation
genDevs.simulation.distributed
genDevs.simulation.realTime

Even though ViewableAtomic and ViewableDigraph modelscan hold information intended for SimView, they need not be altered to run outside of SimView. For example, to run a ViewableDigraph model in a main routine define:
public static void main(String args[]){
ViewableDigraph d = new (Random,rule30CellSpace):
r = new coordinator (d);
r.initialize();
//to measure execution time if desired:initTime = System.currentTimeMillis();
r.simulate(100);termTime = System.currentTimeMillis();}
This can be executed in JBuilder of by changing directory to DevsJava/classes and entering on the command line –>java Random.rule30CellSpace
To understand how this is possible, consider that in atomicSimulator the Devs Simulator Cycle implementation includes “hooks” within its methods, e.g.,
public void computeInputOutput(double t){ if(equalTN(t)) { output = myModel.Out();} else{output = new message();} computeInputOutputHook1() ;}
These hooks are dummy methods within atomicSimulator, e.g.,
protected void computeInputOutputHook1() {}
In ViableAtomicSimulator the hooks are given definitions that allow the SimViewCoordinator to get the infromationit needs to display in SimView, .e.g.,
protected void computeInputOutputHook1(){ if (listener == null) return; ContentIteratorInterface iterator = output.mIterator(); while (iterator.hasNext()) { ContentInterface content = iterator.next(); listener.contentOutputted((content)content,\ viewableAtomic, content.getPort().getName()); } }
atomic
digraph
atomicSimulator
coupledSimulator
coordinator
ViewableAtomic
ViewableDigraph
ViewableAtomicSimulator
coupledRTSimulator
SimViewCoordinator
ViewableAtomic
ViewableDigraph
You can develop models and test them in SimView
Later, when ready for production runs, execute them without change in fast-as-can simulation
Using inheritance and polymorphism to allow easy switching from structure/behavior viewing to fast simulation
simView.ViewableAyato
mic
simView.ViewableDigrap
h

The modeler must define toString() for the simulator to use polymorphically. For example:
public String toString(){return doubleFormat.niceDouble( x ) + ","+doubleFormat.niceDouble(y);}
public String getName(){return toString();}
The modeler also needs to define toObject() and use this method in decoding the message.
public static vect2DEnt toObject(String nm){int commaIndex = nm.indexOf(",");String xs = nm.substring(0,commaIndex);String ys = nm.substring(commaIndex+1,nm.length());return new vect2DEnt(Double.parseDouble(xs),Double.parseDouble(ys));}
public static vect2DEnt toObject(entity ent){return toObject(ent.getName());}
public message out( ){ message m = new message(); m.add(makeContent("out", new vect2DEnt(x,y))); return m;}
public void deltext(double e ,message x){ for (int i=0; i< x.getLength();i++) if (messageOnPort(x,“in",i)) { entity en = x.getValOnPort(“in",i); position = vect2DEnt.toObject(en); }
Using toString() and toObject() to facilitate deploying models in distributed simulation
sender receiver
DEVS simulator uses toString() to encode the entity as a String which is sent across the wire

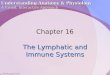
For the coupled model define a RTCoordinatorServer,e.g.,:
public class StartVehicleSpaceServer{ public static void main(String[] args) { try{ System.out.println("For use by clients, this host is " +InetAddress.getLocalHost().getHostAddress()); }catch(Exception c){} new RTCoordinatorServer(new vehicleSpace(), 10);}
You can now distribute these classes onto one or morecomputers and execute them from jBuilder or from thecommand line as illustrated before.
Later, when ready for production runs, execute them without change in distributed, real0time, decentralizedsimulation
Deploying a coupled model onto a distributed, decentralized, real-time simulation
For each component model define a RTCoordinatorClient, e.g.,:public class StartEvaderClient{
public static void main(String[] args) { new RTCoordinatorClient( new vehicle("evader",new vect2DEnt(40,40)), "192.168.1.101", //RTCoordinatorServer’s address //or if on same machine as the server //you can use "localhost",
Constants.serverPortNumber); }}
This will give you the address needed by clients
You can develop models and test them in SimView
StartVehicleSpaceServer
StartEvaderClient
StartPursuerClient
intranet or internet
You can also distribute hierarchically using RTCoordinatorServerAndClient
Continuity.
StartVehicleSpaceServ
er

V&V

General System Philosophy
GeneralSystems
(Isomorphism classes of particular systems basedon relational properties)
ParticularSystems(Engineering,
Scientific, Business,etc.)
abstraction
exemplification
• relational properties (focus on relations)• domain independent• interpretation free• e.g. control theory, information theory• theoretically based distinctions
• constituent properties (focus on things)• domain dependent• interpretation dependent• e.g. aeronautical control systems
, business information systems• experimentally based distinctions
Systems
A system is •a set of things• a set of relations over those things
George Klir, “Architecture of General Systems”

Mathematical SystemsTheory
Hierarchy of System
Specifications
Framework forModeling and
Simulation
Hierarchy of SpecificationMorphisms
entities
relations
uses the formalism of
is interpreted by
Modeling & Simulation/Systems Theory

M&S Framework
Network
Simulation
Modeling
Search
Decision
Collaboration
DEVS
HLA/SOAModel
Real WorldReal World SimulatorSimulator
modelingrelation
simulationrelation
Experimental Frame
Objectives represented by
Layered architecture
Entities formalized as systems; relations as system morphisms

• DEVS = Discrete Event System Specification
• Provides sound M&S framework
• Derived from Mathematical dynamical system theory
• Supports hierarchical, modular composition and reuse
• Can express Discrete Time, Continuous and hybrid models
• Event-orientation enables efficient simulation
DEVS Modeling & Simulation Framework
• HLA/SOA enables interoperability of existing simulations
• DEVS supports developing new simulation models within an object-oriented computational framework

Joint MEASURETM
• Jointly Developed by Lockheed and UA under DARPA ASTT
• Mission Effectiveness Simulator for
System-of-Systems • employs moderate level of resolution
Network
Simulation
Modeling
Search
Decision
Collaboration
HLA
DEVS
ME
* Mission Effectiveness Analysis Simulator for Utility, Research and Evaluation
ThreatDetection
Data
ThreatAnalysis
Relay
Inter-satelliteCommunication
JM Application: C4ISR System-of-System Design
WAN link

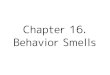
Hierarchy of System Specifications and Morphisms
Network of systems Network of systems‘
Multi-component system Multi-component system‘
Structured system Structured system‘
I/O system I/O system‘
I/O function I/O function‘
I/O relation I/O relation‘
I/O frame I/O frame‘
Systemspecificationlevels
Morphisms at each level
behaviortostructure
structuretobehavior
V&V loop
experimental testing at low
levels
simulation model
construction at high levels

V&V