Embed Size (px)
Citation preview

Chapter(12(
Ch.(12(–(Rota/on(of(a(rigid(body(

Up(to(to(now,(we(have(basically(modeled(all(objects(as(“point(objects”.(
(
In(this(chapter(–(we(begin(a(more(realis/c(descrip/on(of(an(object(as(a(
“distributed(object”.(
(
This(requires(us(to(expand(our(use(of(Newton’s(Laws(to(incorporate(
simultaneous(transla/on((linear(mo/on)(and(rota/on((angular(mo/on).(

Review(of(rota/on:(
!!
θ f =θi +ω i t+12αt2
ω f =ωi +αt
ω f2 =ωi
2 +2α∆θ !!
ω =dθdt
α =dωdt
=d2θ
dt2 !!
s= rθ !!!!!!!!!!!f = 1T!!!!!!!!!!!vt =2πrf =
2πrT
=ωr
ω =2π f !!!!!!!ar =ac =v2
r!!!!!!atan =
v2
r=ω2r

Review(of(rota/on:(

Two coins rotate on a turntable. Coin B is twice as far from the axis as coin A.
Slide(12N28(
A. The angular velocity of A is twice that of B.
B. The angular velocity of A equals that of B.
C. The angular velocity of A is half that of B.

The fan blade is speeding up. What are the signs of ω and α?
A. (ω(is(posi/ve(and(α(is(posi/ve.(((
B. (ω(is(posi/ve(and(α(is(nega/ve.(((
C. (ω(is(nega/ve(and(α(is(posi/ve.(((
D. (ω(is(nega/ve(and(α(is(nega/ve.(((
Slide(12N30(

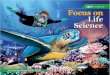
For(“distributed”(objects(under(rota/on,(
they(will(free(rotate(about(a(point(called(
the(“center(of(mass”(((CM).((
(
The(CM(does(NOT(have(to(reside(inside(of(
the(object.(

Center(of(mass(of(a(collec/on(of(objects:(
!!xcm =
1M
mixi∑ =m1x1+m2x2 +m3x3+...
m1+m2 +m3+...
!!ycm =
1M
miyi∑ =m1y1+m2y2 +m3y3+...
m1+m2 +m3+...
0((((((((a((((((((2a(
a(
(
0(
(
Na(
Ex.(12N1(

CM(of(a(collec/on(of(objects:((
(
2(kg(and(3(kg(masses(are(separated(by(40(cm.((
They(are(connected(by(a(1(kg(rod.((What(is(the(
center(of(mass(of(this(system?(
!!xcm =
1M
mixi∑ =m1x1+m2x2 +m3x3+...
m1+m2 +m3+...
Ex.(12N2(
2(kg( 3(kg(

!!
Linear:!!!!dm=λ !dxArea:!!!!!!!dm=σ !dAVolume:!!dm= ρ !dV
!!
Mass:!!!!M= dm∫
xcm =1M
xdm∫
ycm =1M
ydm∫λ(=(mass/length(
σ(=(mass/area(
ρ(=(mass/volume(
dm(
x(=(x1((((((((((((((((((((((((((((((((x(=(x2(

Example(12N3:(
(
Given(a(rod(of(length(L(with(a(mass(density(of:(
(
(
(
Find(the(mass(and(center(of(mass.(
Ex.(12N3(
!!λ x( ) = M
L
"
#$
%
&' 1+2
xL
"
#$
%
&'
x(=(0(((((((((((((((((((((((((((((((((((((((((((x(=(L(

Moment(of(Iner/a:(
(
Consider(to(be(a(form(of(“rota/onal(mass”(
!!
Moment!of!inertia:!!I = r2dm∫
I = miri2∑

Example(12N4a:(
(
Find(the(moment(of(iner/a(about(
axis(A1.((Assume(the(objects(are(
each(separated(by(a(distance(“a”.(
2m( 3m( m( m(
A1(

Example(12N4b:(
(
Find(the(moment(of(iner/a(about(axis(A2.(((
2m( 3m( m( m(
A2(
a)(16ma2((((b)((7(ma2(((((c)(5ma2(((((d)(9ma2(

ParallelNAxis(Theorem:((Iaxis(=(ICM(+(md2+( m( 3m( m(
A( CM(Compute:((ICM(and(IA(
Ex.(12N5(


Mathema/cs(break:((The(crossNproduct(((vector,(vector(mul/plica/on)(
(
(
N(A(cross(product(results(in(a(new(vector(that(is(perpendicular(to(the(
direc/on(of(both(of(the(original(vectors.(
(
N(The(“right(hand(rule”(can(be(used(to(evaluate(the(new(vector(direc/on.(
A
B
C
A×B =C
C = ABsinθab
Key property:B×A = −
C = −
A×B( )
i × j = k j × k = i k × i = j (+)j × i = −k k × j = −i i × k = − j (−)i × i = j × j = k × k = 0
i
j k+# .#

Some(examples:( Vector(out(of(page(
(
Vector(into(page(
A+B+
A+
B+
A+
B+A+
B+
A+
B+
i × j = k j × k = i k × i = j (+)j × i = −k k × j = −i i × k = − j (−)i × i = j × j = k × k = 0
i
j k+# .#

Some(examples:(
i × j = k j × k = i k × i = j (+)j × i = −k k × j = −i i × k = − j (−)i × i = j × j = k × k = 0
i
j k+# .#
Vector(out(of(page(
(
Vector(into(page(
A = 3i + 4kB = 2i − jFind :
A×B
A = −2 j +3kB = 2i −3kFind :
A×B

• We(have(considered(forces(to(give(rise(to(the(mo/on(of(an(object.(
• (In(par/cular:((linear(mo/on,(circular(mo/on(
• For(a(rigid(object,(the(applica/on(of(a(TORQUE(will(give(rise(to(a(rota/on(of(the(object(about(an(axis.(

• Define(Torque(–(as(“push(or(pull”(that(gives(rise(to(rota/on.(
!τ =!r ×!F
τ = rF sinθ
θ
CCW(rota/on(–(posi/ve(
CW(rota/on(N(nega/ve(

• Some(examples(–(find(the(number(of(applied(torques;(are(they(
posi/ve(or(nega/ve?(
Pushing(on(a(door((viewed(from(above)(

Torque(calcula/ons:(
(
a) Let(b) Right(c) Into(board(d) Out(of(board(
Torque(calcula/ons:(
(
a) Up(b) Down(c) Let(d) Right(

• Examples(–(find(the(number(of(applied(torques;(are(they(posi/ve(
or(nega/ve?(Hanging(sign,(
supported(by(wires(
sign(
wall(

• Newton’s(2nd(Law(for(rota/on:(
!τ∑ = I !α

• Newton’s(2nd(Law(for(rota/on:(
• Ex.(12N6:((Find(the(angular(accelera/on((
!τ∑ = I !α
m( 3m( m(
A( F"

Ex.(12N7:((Solve(for(the(angular(accelera/on(of(a(“real(pulley”(
!τ∑ = I !α
mp(
F"m
F(=(100(N(
m(=(10(kg(
mp(=(5(kg(
rp(=(0.1(m(
I((disk)(=(½(mr2(

Example(12N8:(
(
Solve(for(power(usage(of(a(grinding(wheel:(
Push(down(with(a(force(F(=(20(N(for(5(sec(at(
angle(of(110˚.((If(the(ini/al(angular(velocity(is(
200(rad/sec,(find(final(velocity(and(power(
usage(over(5(sec.(
mp(
F"F(=(20(N(
m(=(10(kg(
mw(=(60(kg(
rp(=(0.2(m(
I((disk)(=(½(mr2(

Rolling(w/o(slipping(–(rolling(constraint:((vcm(=(ωR(
(
Sum(of(transla/onal(+(rota/onal(mo/on(
vCM(vROT(
Rω(
NRω(
v(=(2vcm(=(2Rω(
v(=(vcm(=(Rω(
v(=(0(

Transla/onal(Kine/c(Energy:((Krot(=(½(Iω2(
(
For(rolling:((K(=(Ktrans(+(Krot((
(
( K =
12
mvCM2 +
12
Icmω2 = KCM +Krot

Example(12N9:(((
A(hoop(and(a(ball(of(the(same(mass,(m(=(1.2(kg,(
and(radius,(r(=(0.3(m,(slide(down(inclined(planes(
with(h(=(0.5(m.((Which(one(arrives(at(the(borom(
with(a(higher(velocity?(
(
Ihoop(=(MR2((
Isphere(=(2/5(MR2(((

Angular(momentum:(
(
L(=(Iω(((kgNm2/s)(N Has(similar(property(to(linear(momentum(
N If(τnet(=(0,(angular(momentum(is(conserved((
(Lini/al(=(Lfinal)(
τ =
dLdt
=d Iω( )
dt= I dω
dt= Iα

Ex.(12N10:((Angular(momentum((1)(
(
A(thin(disk((m(=(1(kg,(r(=(0.1(m)(is(
rota/ng(at(10(rad/sec.((A(mass(m(=(
0.4(kg(is(placed(at(the(outer(edge(of(
the(disk.((What(is(the(new(angular(
velocity?(

Ex.(12N11((Angular(momentum(
A(1500(kg,(0.8(m(dia.(cylindrical(satellite(
has(a(pair(of(50(kg(variable(solar(panels.((
The(satellite(is(ini/ally(rota/ng(at(2(rev/
sec(when(the(panels(at(1(m.((If(the(panels(
move(out(to(1.3(m,(what(is(the(new(
rota/onal(speed.( Panel:((L(=(0.4(m(x(H(=(0.2(m(


mg(
ffric(
N(
θh(
L(
θh"
L"
mg#ffric#
N#