-
8/22/2019 Chapter 8 State Space Analysis
1/22
Chapter 8 (page# 535)
State Space Analysis
Chapter 8 (page# 535)
State Space Analysis
Reading assignment:
Section 8.2 (page 536 to 545)
8.2.5 (page 551 to 554)
-
8/22/2019 Chapter 8 State Space Analysis
2/22
Why State-Variable ModelsWhy State-Variable Models
Computer-aided analysis works better forstate models than
the transfer function approach.
State variable model provide more internal information about
the plant, allowing more complete control.
Optimal (best) design procedures are mostly based on theuse of
state-variable models.
The state variable models are required fordigital
simulation.
System State DefinitionSystem State DefinitionThe state of a
system is defined as
The state of a system at any time t0 is the amount of
information
at t0 that, together with all inputs for t t0, uniquely defines
the
behavior of the system for all t
t0.
-
8/22/2019 Chapter 8 State Space Analysis
3/22
State Equations Standard Formtate Equations tandard Form
)()()()()()(
tttttt
DuCxyBuAxx
+=
+=
State equationOutput equation
State vectorSystem matrix
u(t) = input vector = (n 1) vector of input functions
y(t) = output vector = (p 1) vector of defined outputs.
is the time derivative ofx(t) x(t) is the state vector, an (n 1)
vector of the states A is the system matrix, an (n n) matrix of the
coefficients
Bis an (n r) input matrix where ris the number of inputs C= (p
n) output matrix D= (p r) matrix representing direct coupling
between the
input and output. (Neglected)
)t(x
-
8/22/2019 Chapter 8 State Space Analysis
4/22
Cxy
BuAxx
=
+=
=s1B CU
x
A
Y
X
+
+
responseCxy
solutionBuAxx
=
+=
State Equation
InitialC
onditions
-
8/22/2019 Chapter 8 State Space Analysis
5/22
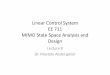
Example 2 RLC CircuitExample 2 RLC Circuit
+
vOUT
_
v1
i1
Reference node
v2
+v
_
i+vIN_
R L
C
v1 v2
The system has two state variables, the inductor current (i)
andthe capacitor voltage (v).
We can obtain the system equations by use of 1) mesh
analysis, 2) nodal analysis, or3) mixed (both) analysis. We
would
nor-mally choose mesh analysis since there is only one mesh;
how-ever, we have a new constraint avoiding integrals.
The results of each approach are given on the following
page.
-
8/22/2019 Chapter 8 State Space Analysis
6/22
System EquationsSystem Equations
=
=+++
t
OUT
t
IN
idtC
v
idtCdt
diLiRv
Mixed
0
0
1
01
01
01
21
02
021
1
=+
=+
dt
dvCdt)vv(
L
dt)vv(LR
vv
AnalysisNodal
t
tIN
0
0
=+
=+++
dt
dvCi
vdt
diLiRv
AnalysisMesh
IN
All three results are valid models but only the equations
obtainedfrom the mixed analysis can be represented as state
equations in
the standard form. The state equations are given below:
C
i
dt
dv
vLvLiL
R
dt
diIN
=
+=
11
This form is frequently used in digital simulation.
-
8/22/2019 Chapter 8 State Space Analysis
7/22
State EquationsState Equations
vv
vLvi
C
LL
R
vi
OUT
IN
CC
=
+
=
0
1
01
1
The state equations, in standard form, for the series RLC
circuit
are:
-
8/22/2019 Chapter 8 State Space Analysis
8/22
Solution Using TransformsSolution Using Transforms
)866.05.0)(866.05.0(
1
1
)(
)( 2 jsjssLC
sL
Rs LC
sV
sV
IN
OUT+++=++=
The solution forvOUT
(t) will have the form
tjtj
OUT eVeVVtv)866.05.0(
2
)866.05.0(
10)(+
++=The constants V
0, V
1, and V
2are evaluated using partial fractions:
1)866.05.0)(866.05.0(
10 =
+=
jjV
,
2887.05.0)732.1)(866.05.0(
11 j
jjV +=
=
2887.05.0)732.1)(866.05.0(
12 j
jjV ==
)866.0sin(5774.0)866.0cos(1)( 5.05.0 tetetv ttOUT =
vOUT(t) can be obtained by taking the inverse:
-
8/22/2019 Chapter 8 State Space Analysis
9/22
IN
CCvLv
i
C
LL
R
v
i
+
=
0
1
01
1
+=
=
sC
LL
Rs
C
LL
R
1
1
01
1
10
01AI
Formal SolutionFormal SolutionWe may use the standard form
directly:
The characteristic equation for a
set of state equations is given by|I A| where A is the
system
matrix, I is the identity matrix,
and the values are the
eigenvalues. The matrix |I
A|is given by
Taking the determinant of this matrix yields 012 =++=LCL
RAI
This agrees with the previous results (the denominator of
the
trans-form).
-
8/22/2019 Chapter 8 State Space Analysis
10/22
)(2
2
tfKydt
dyB
dt
ydM =++
)(2
2
tfKydt
dyB
dt
ydM +=
KBsMs
sG
++
=2
1)(
ytxLet =)(1
)()()(
)(12
txdt
tdx
dt
tdytx ===
2
2
22
)()(
dt
tdy
dt
tdxx ==
21 xx =
fKxBxxM += 122
M
fx
M
Kx
M
Bx += 122
[ ]xy
fM
x
M
B
M
kx
x
01
1
010
2
1
=
+
=
State variable Modeling
-
8/22/2019 Chapter 8 State Space Analysis
11/22
23112111 ukuykyky +=++
1615242
ukykyky =++
Example: Consider the system described by the coupled
differential equations
u1 & u2 are inputs, y1 & y2 are outputs. ki ;i=1,.6 are
system parameters.
23
112
11
yx
xyx
yxLet
=
==
=
23121122 ukuxkxkx ++=
1634253 ukxkxkx +=
32
11
xy
xy
equationoutput
=
=
xy
f
k
kx
kk
kk
x
x
x
=
+
=
100
001
0
1
00
0
0
010
6
3
45
12
3
2
1
-
8/22/2019 Chapter 8 State Space Analysis
12/22
Simulation Diagram
[ ] ;x)t(y
)t(u)t(x)t(xGiven
14
1
1
28
10
=
+
=
-
8/22/2019 Chapter 8 State Space Analysis
13/22
Control canonical (Controllable)
&
Observer Canonical (Observable)
Matrix A,B & C are constructed from the transfer
function.
Next - Examples
-
8/22/2019 Chapter 8 State Space Analysis
14/22
-
8/22/2019 Chapter 8 State Space Analysis
15/22
-
8/22/2019 Chapter 8 State Space Analysis
16/22
-
8/22/2019 Chapter 8 State Space Analysis
17/22
Next slides consider general standard Transfer Function
-
8/22/2019 Chapter 8 State Space Analysis
18/22
2
2 1 0
3 2
2 1 0
( )
( )
Y s b s b s b
U s s a s a s a
+ +=
+ + +
2 1 0
2 3
2 1 0
2 3
( )
( ) 1
b b bY s s s s
a a aU s
s s s
+ +=
+ + +
Dividing each term by the highest order ofs yields
Control canonical form block diagram.
[ ] [ ]
1 1
2 2
3 0 1 2 3
1
0 1 2 2
3
0 1 0 0
0 0 1 01
0
x x
x x ux a a a x
x
y b b b x u
x
= +
= +
&
&&
GH
G
U
Y
+==
1
is canonical form
E l
-
8/22/2019 Chapter 8 State Space Analysis
19/22
2 1 02 2 3 2 3
3 2
2 1 02 3 2 3
2 8 6( ) 2 8 6
8 26 6( ) 8 26 6 1 1
b b bC s s s s s s s s s
a a aR s s s s
s s s s s s
+ + + ++ +
= = =
+ + + + + + + + +The form is:
[ ]
1 1
2 2
3 3
1
2
3
0 1 0 0
0 0 1 0
6 26 8 1
6 8 2 [0] .
x x
x x r
x x
x
y x r
x
= +
= +
&
&
&
System controllable but not observable. Why?
Ans: State model is based on controllable canonical form,
this
can be confirmed by another method later in the next
lecture.
is controllable canonical form
Example
-
8/22/2019 Chapter 8 State Space Analysis
20/22
Observer canonical form block diagram.
2
2 1 0
3 2
2 1 0
( )
( )
Y s b s b s b
U s s a s a s a
+ +=
+ + +
2 1 0
2 3
2 1 0
2 3
( )
( ) 1
b b bY s s s s
a a aU s
s s s
+ +=
+ + + GH
G
U
Y
+==
1
[ ]001
00
10
01
2
1
0
3
2
1
0
1
2
3
2
1
=
+
=
Y
u
b
b
b
X
X
X
a
a
a
X
X
X
called observable canonical
-
8/22/2019 Chapter 8 State Space Analysis
21/22
[ ]001
00
10
01
2
1
0
3
2
1
0
1
2
3
2
1
=
+
=
Y
u
b
b
b
X
X
X
a
a
a
X
X
X
[ ]210
3
2
1
2103
2
1
1
0
0
100
010
bbbY
u
X
X
X
aaaX
X
X
=
+
=
observable but not controllableControllable but not
observable
called observable canonicalcalled controllable canonical
-
8/22/2019 Chapter 8 State Space Analysis
22/22
3
1
34
1
31
12 +
=++
+=
++
+=
sss
s
)s)(s(
s)s(G
Controllable canonical
[ ]
=
+
=
2
111
1
0
43
10
x
xy
uxx
Observable canonical
[ ]
=
+
=
2
110
1
1
41
30
x
xy
uxx