Embed Size (px)
DESCRIPTION
Chapter 8. State Feedback and State Estimators. Homework 8. Refer to the last example. (a) Calculate the transfer function G ( s ) of the system. (b) Calculate the steady-state value of the system to a step input, using the Final Value Theorem of Laplace Transform . - PowerPoint PPT Presentation
Citation preview

President University Erwin Sitompul Modern Control 10/1
Lecture 10Modern Control
Dr.-Ing. Erwin SitompulPresident University
http://zitompul.wordpress.com2 0 1 3

President University Erwin Sitompul Modern Control 10/2
Chapter 8 State Feedback and State Estimators
Homework 8Refer to the last example.(a) Calculate the transfer function G(s) of the system.(b) Calculate the steady-state value of the system to a step input,
using the Final Value Theorem of Laplace Transform.(c) Determine the gain K so that the steady-state response of
KG(s) has zero error to a step input.(d) Find out the relation between the transfer function gain K
and the reference gain E.

President University Erwin Sitompul Modern Control 10/3
1 ( )( ) ( )( )Y sG s sU s
c I A bk b
Chapter 8 State Feedback and State Estimators
Solution of Homework 8(a) Calculate the transfer function of the system in s-Domain.
1
0 2 1 1 14 11 1
0 1 1 2 2ss
12 0 1
1 19 1 2s
s
2
3 4( )3 2sG s
s s
2
1 0 11 1
9 2 23 2
ss
s s
1
0 2 1 4 1 11 1
0 1 1 8 2 2ss

President University Erwin Sitompul Modern Control 10/4
Chapter 8 State Feedback and State Estimators
Solution of Homework 8(b) Calculate the steady-state value of the step response of the
system, using the Final Value Theorem of Laplace Transform.
0 0( ) lim ( ) lim ( ) lim ( ) ( )
t s sy y t s Y s s G s U s
20
3 4 1lim3 2s
sss s s
42
2

President University Erwin Sitompul Modern Control 10/5
Chapter 8 State Feedback and State Estimators
Solution of Homework 8(c) Determine the gain K so that the steady-state response of KG(s)
has zero error to a step input.
0( ) lim ( ) ( ) 2
sy s G s U s
0( ) lim ( ) ( ) ( ) 1( )
sy s KG s U s u t
0.5K
(d) Find out the relation between the transfer function gain K and the reference gain E.
K E
0
0
aKb

President University Erwin Sitompul Modern Control 10/6
Chapter 10 Optimal Control
Optimal Control Optimal control deals with the problem of finding a control law
for a given system, such that a certain optimality on a criterion is achieved.
The resulting control law is optimal solution of a cost function or performance index, which is a function of state variables and control variables.
An optimal control is described in a set of differential equations, describing how the control variables may minimize the cost function.

President University Erwin Sitompul Modern Control 10/7
Optimal ControlChapter 10 Optimal Control
An example: Consider a car traveling on a straight line through a hilly road.
The question: How should the driver press the gas pedal in order to minimize the total traveling time?
As the system we may regard both the car and the contour of the road.
The term “control law” in this example refers specifically to the way in which the driver presses the gas pedal and shifts the manual gears as the input to the system.
The optimality criterion, which described the output of interest, is the minimization of the total traveling time.
Besides, the control problems usually include additional constraints. For example, the amount of available fuel might be limited, the gas pedal cannot be pushed through the floor of the car, speed limits, etc.

President University Erwin Sitompul Modern Control 10/8
A proper cost function (or performance index) will give a mathematical expression of the traveling time as a function of speed (again a function of gas pedal position and gear position), road contour, additional constraints, and initial conditions of the system.
Another optimal control problem is to find the way to drive the car so as to minimize its fuel consumption, given that it must complete a given course not slower than a certain time limit.
Even another control problem is to minimize the total financial cost of completing the trip, given assumed price for time and fuel.
Chapter 10 Optimal Control
Optimal Control

President University Erwin Sitompul Modern Control 10/9
Performance Indexes A performance index is a mean to measure the control
performance in the completion of a control objective. Suppose the control objective is to bring a system modeled by:
Chapter 10 Optimal Control
( ) ( )t ty Cx( ) ( ) ( )t t t x Ax Bu 00( )t x x
in such a way and in a fixed time interval [to,tf], so that the components of the state vector are “small”.
A suitable performance index to be minimized would be:f
o
T1 ( ) ( )
t
t
J t t dtx x

President University Erwin Sitompul Modern Control 10/10
If the control objective is to manipulate the system so that the components of output y(t) are to be small, then:
Chapter 10 Optimal Control
f
o
T2 ( ) ( )
t
t
J t t dty y
f
o
TT ( ) ( )t
t
t t dtx C Cx
f
o
T ( ) ( )t
t
t t dtx Qx
where Q = CTC is a symmetric positive semidefinite matrix.
A matrix is a positive semidefinite matrix if all the real parts of its eigenvalues are more or equal to zero, OR, if for all nonzero vector z with real entries, then zTQ z ≥ 0.
Performance Indexes

President University Erwin Sitompul Modern Control 10/11
Chapter 10 Optimal Control
Performance Indexes In order to control the inputs u(t) so that they are not too large, we
use the following performance index:f
o
T3 ( ) ( )
t
t
J t t dtu u
f
o
T4 ( ) ( )
t
t
J t t dtu Ru
where R is a symmetric positive semidefinite weight matrix. Not all performance indexes can be minimized at the same time.
A compromise can be taken by minimizing a convex combination of the indexes, e.g.:
5 1 3(1 )J J J
f
o
TT ( ) ( ) (1 ) ( ) ( )t
t
t t t t dt x x u u , 0 1

President University Erwin Sitompul Modern Control 10/12
The weighting constants can also be accommodated in the weight matrices Q and R as follows:
Chapter 10 Optimal Control
Performance Indexes
f
o
TT6 ( ) ( ) ( ) ( )
t
t
J t t t t dt x Qx u Ru
with0 0
0,
00 0
Q
1 0 00 1
1 00 0 1
R

President University Erwin Sitompul Modern Control 10/13
Some Performance Indexes for Optimal Control ProblemsChapter 10 Optimal Control
1. Minimum-time problemsf
o
f o
t
t
J t t dt
Tr rf f f f( ) ( ) ( ) ( )J t t t t x x H x x
f( )txr f( )tx
: final state: reference final state
2. Terminal control problems
3. Minimum control effort problems
4. Tracking problems
f
o
T ( ) ( )t
t
J t t dt u Ruf
o
2( )t
t
t dt Ru
f
o
2 2 2r rf f( ) ( ) ( ) ( ) ( )
t
t
J t t t t t dt Q R Hx x u x x

President University Erwin Sitompul Modern Control 10/14
Optimal Control: Minimizing State VectorChapter 10 Optimal Control
Consider the n-dimensional single-variable state space equations:
( ) ( )y t tcx( ) ( ) ( )t t u t x Ax b
The desired state vector is represented xd(t) = 0. We will select a feedback controller, so that u(t) is some function
of the measured state variables x(t), and therefore( ) ( )u t t k x
Substituting into the first equation, we obtain( ) ( ) ( )t t t x Ax bk x ˆ ( )tAx

President University Erwin Sitompul Modern Control 10/15
Optimal Control: Minimizing State VectorChapter 10 Optimal Control
The performance index to be minimized is the one expressed in terms of the state vector
f
o
T1 ( ) ( )
t
t
J t t dtx x
In minimizing J1, we let the final time of interest be tf = ∞. To obtain the minimum value of J1, we postulate a decreasing
magnitude of the state vector, or equivalently, its negative first derivation.
We assume the existence of an exact differential so that T T( ) ( ) ( ) ( )d t t t t
dtx Px x x
where P is yet to be determined.
P is chosen to be symmetric to simplify the algebra without any loss of generality.

President University Erwin Sitompul Modern Control 10/16
Optimal Control: Minimizing State VectorChapter 10 Optimal Control
Then, for a symmetric P, pij = pji, the differentiation on the left-hand side of the last equation can be completed as
T T T( ) ( ) ( ) ( ) ( ) ( )d t t t t t tdt
x Px x Px x Px
ˆ( ) ( )t tx Ax Butthus
TT Tˆ ˆ( ) ( ) ( ) ( ) ( ) ( )d t t t t t t
dt x Px Ax Px x P Ax
TT Tˆ ˆ( ) ( ) ( ) ( )t t t t x A P x x PAx
TT ˆ ˆ( ) ( )t t x A P PA x
If T T( ) ( ) ( ) ( )d t t t tdt
x Px x xTˆ ˆ A P PA I then as wished.

President University Erwin Sitompul Modern Control 10/17
Optimal Control: Minimizing State VectorChapter 10 Optimal Control
f
o
T1 ( ) ( )
t
t
J t t dtx x
Further
f
o
T ( ) ( )t
t
d t t dtdt
x P x T
0( ) ( )t t
x P x T (0) (0)x P x
Therefore, to minimize the performance index J1, the following two equations must be considered
f
o
T T1 ( ) ( ) (0) (0)
t
t
J t t dt x x x P xTˆ ˆ A P PA I

President University Erwin Sitompul Modern Control 10/18
Example: Optimal State FeedbackChapter 10 Optimal Control
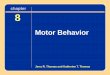
Consider the open-loop control system shown in the figure below. The state variables are x1 and x2. The step response of the system is quite unsatisfactory due to undamped poles at the origin.
0 1 0( ) ( ) ( )
0 0 1t t u t
x x
( )U s ( )Y s1s
1s
1X2X
We will choose a feedback control in the form of1 1 2 2( ) ( ) ( ) ( )u t t k x t k x t k x
Therefore, inserting u(t) into the state equation,
1 2
0 1( ) ( )t t
k k
x x ˆ ( )tAx

President University Erwin Sitompul Modern Control 10/19
Example: Optimal State FeedbackChapter 10 Optimal Control
To minimize the performance index J1, we write again the equationTˆ ˆ A P PA I
1 11 12 11 12
2 12 22 12 22 1 2
0 0 1 1 01 0 1
k p p p pk p p p p k k
1 12 12 1 1 22 11 2 12
1 22 11 2 12 12 2 22 12 2 22
1 00 1
k p p k k p p k pk p p k p p k p p k p
Letting k1 equals an arbitrary stable value, say k1 = 2, then
121 ,4
p 22
112
64kpk
222
3 ,4
pk

President University Erwin Sitompul Modern Control 10/20
Example: Optimal State FeedbackChapter 10 Optimal Control
The integral of the performance index is rewritten asT T
10
( ) ( ) (0) (0)J t t dt
x x x P x
We will consider the case where the initial states are given as xT(0) = [1 2], so that
11 121
12 22
11 2
2p p
Jp p
11 12
12 22
21 2
2p pp p
11 12 224 4p p p
Substituting the values of P we already have,22
12 2
6 314kJk k
22 2
2
4 184
k kk

President University Erwin Sitompul Modern Control 10/21
Example: Optimal State FeedbackChapter 10 Optimal Control
To minimize J1 as a function of k2, we take the derivative w.r.t k2 and set it equal to zero
21 2 2 2 2
22 2
(2 4)(4 ) (4)( 4 18) 0(4 )
dJ k k k kdk k
224 72 0k 2 18k
Thus, the system matrix for the compensated system is0 1
( ) ( )2 18
t t
x x ˆ ( )tAx
Checking the characteristic equation of the compensated system,ˆ( ) det( )a s s I A
1det
2 18
s
s
2 18 2s s
1,2 2.121 1.581s • Both poles are now with negative real value• The system is optimal for the given values of k1 and x(0)

President University Erwin Sitompul Modern Control 10/22
Homework 9Chapter 10 Optimal Control
Consider again the control system as given before, described by
0 1 0( ) ( ) ( )
0 0 1
( ) 1 0 ( )
t t u t
y t t
x x
x
Assuming the linear control law1 1 2 2( ) ( ) ( ) ( )u t t k x t k x t k x
Determine the constants k1 and k2 so that the following performance index is minimized
T T1
0
( ) ( ) (0) (0)J t t dt
x x x P x
Consider only the case where the initial condition is x(0)=[c 0]T and the undamped natural frequency (ωn) is chosen to be 2 rad/s.
• Recall again the standard form of a second order transfer function (FCS)
• Calculate the transfer function of the system if compensated with k
• Determine the value of corresponding k (k1 or k2?) to obtain ωn as requested

President University Erwin Sitompul Modern Control 10/23
Homework 9AChapter 10 Optimal Control
Consider the system described by the equations
0 1 0( ) ( ) ( )
0 0 1
( ) 1 0 ( )
t t u t
y t t
x x
x
Determine the optimal control which minimizes the following performance index. (Hint: You may assume the value of the feedback gain, where available.)
21
0
( )J y t dt