-
Chapter 7 Balancing of Reciprocating Machines
We have already discussed how to obtain inertia forces of
linkages (the four-bar and reciprocating
engine mechanisms). Such inertia forces cannot be avoided and we
have to consider these forces in
designing of linkages. (These inertia forces increase stresses
in members and loads in bearing). Inertia
force 2 , where is the angular velocity of links. For linkages
with very high speed, inertia
forces (or loading) results in vibrations, noise emission and
sometimes machine failure due to fatigue.
Inertia force of a reciprocating mass:
y
2A
l
3B
x
x
r+l
O2
r
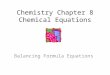
Figure 1 A reciprocating mechanism
The displacement of the piston is given as
1/ 2
2
2
sincos 1x r l
n
= +
with n = l/r (1)
The velocity of the piston can be obtained as
0 .5
2 2
1 sin 2sin
2 1 sinx r
n n
= +
(2)
The acceleration of the piston can be obtained as
2 42
1.53 2 2
( 1)cos2 coscos
1 sin
nx r
n n
+ = +
(3)
In equation (1) the term 0.5
2 21 (sin ) / n is expanded bi-nominally to give a harmonic
analysis. i.e
,x x and x can be represented as the cosine and sine terms of
harmonics. The frequencies
representing integral multiples of the fundamental frequency are
called harmonics, with the
fundamental frequency being the first harmonic. For example:
-
122
0 02 0n
fundamental harmonic second harmonic thn harmonic
A series of harmonic functions are known as the Fourier series.
A harmonic function of any arbitrary
frequency is periodic i.e. it repeats itself at equal intervals
of time /2=T , where T is the
period of excitation. If a function is periodic, it is not
necessary that it will be harmonic.Let
tAx cos= is a harmonic function with period /2 or frequency .
Any arbitrary periodic
functions can be represented by a convergent series of harmonic
functions whose frequencies are
integral multiples of certain fundamental frequency ( )T/20 =
.
Fourier Series:
1
0 02 1( ) ( cos sin )
n
r rrf t a a r t b r t
== + + (4)
with
/ 2
0
/ 2
2( )cos
T
r
T
a f t r t dtT
= and / 2
0
/ 2
2( )sin
T
r
T
b f t r tT
=
T/20 = ; 1,2,3,r =
where T is the period of function f(t).
Shaking force: Bearing loads due to inertia forces of
rotating/reciprocating masses of mechanism
causes shaking of the mechanism due to its dynamic nature i.e.
it changes with time. This bearing
loads due to inertia forces of mechanism are called shaking
forces. Shaking force can be minimised by
balancing the inertia forces in opposition to each other such
that little or no force is transmitted to
machine supports. The degree to which this shaking force is
undesirable depends upon the frequency,
, of shaking force and the natural frequency, nf , of flexible
members (such as shafts, bearings,
supports, etc.) through which the force is transmitted. For nf =
we have undesirable resonance
condition.
Primary and secondary forces can be replaced by rotating masses
as:
1. A mass bm at radius r at A and rotating with crank with the
component in horizontal
direction will be same as by reciprocating mass bm of piston
i.e. primary force.
-
123
2. A, mass bm at radius )4/( nr and rotating at twice the crank
angular velocity . The
component in the horizontal direction will be same as that due
to piston bm i.e. secondary
force.
The acceleration of piston can be obtained up to second
harmonics as:
)2cos
(cos2
nrAp
+= (5)
where, n=l/r
F32
F32Sin
O2
A
mb2bsin
mb
2b
mb
mb2cos
F32 cos
primary force
=mbr2cos
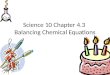
Figure 2 A crack with a counter balance mass
0cos)sin(cos)sin( 122
32 =++ TbbmrF b
with cossincossin 223212 bmrFT b=
For a single cylinder engine the inertia force due to the
reciprocating mass, 43 mmm BB += , will be
2 cos2cosBF m rn
= +
(6)
where Bm3 is one of the equivalent mass of connecting rod at
piston and 4m is the mass of piston.
For F ve + the inertia force will be directed away from main
bearing and for F ve the inertia
-
124
force towards the main bearing. Bearing load due to this inertia
force will be in the same direction as
the inertia force.
In equation (6), various terms can be defined as follows:
First term:
cos2rmb (7)
is called primary force. It reaches its maximum value of 2rmb
twice per revolution, when
0= and .
Second term:
nrmB
2cos2 (8)
is called secondary force. It reaches its maximum value of 2 /Bm
r n four times per revolution of
crank when 0, / 2, and 3 / 2 = .
(i) Harmonic motion (Fundamental) is given as tAx cos= , where A
is the amplitude and is the
frequency so that sinx A t = and 2 cosx A t = , where 2 /T = is
the period and
t = .
The primary inertia force tAmF pi cos2+=
(ii) Second harmonic motion is given as tAx 2cos= , so that 2
sin 2x A t = and
24 cos2x A t = .
The secondary inertia force tAmtAmF si 2cos)4(2cos422 ==
Both the primary and secondary inertia forces represent a force,
which is constant in direction but
varying in magnitude, and hence cannot be completely balanced by
a rotating mass (or which inertia
force is varying in the direction but is constant in the
magnitude).
Assumption: (i) The replacement of the connecting rod by two
masses at its ends maintains
complete dynamic equivalence (ii) The crank is so designed that
the combined centre of mass of
the crank and the apportioned connecting rod mass, 3m , at the
crank pin lies on the axis of rotation,
and (iii) the engine speed is constant. For multi-cylinder
engines, we shall apply these assumptions to
each constituent cylinder.
-
125
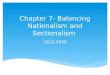
Bearing load: In reciprocating engine the bearing load due to
the piston inertia can be obtained with
help of following free body diagram, which is
self-explanatory.
Figure 3 (a) A reciprocating engine
From ABO2
sinxq =
xFT sin34=
qF .34= 2112 . TqF ==
21TT =
Figure 3(b) Free body diagram of the connecting rod
Figure 3 (c) Free body diagram of the piston
Figure 3 (d) Free body diagram of the crank
Figure 3 (e) Free body diagram of bed
Figure 3 (f) Equivalent system of Figure (e)
-
126
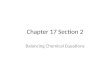
The full effect on the engine frame of the inertia of the
reciprocating mass is equivalent to the force,
2 1(cos cos2 )m r n + , along the line of the stroke at O.
Figure 4 (a) (top) Bearing load due to rotating
mass (bottom) reaction force on the engine
frame
Figure 4 (b) (top) Centrifugal forces on disc (bottom)
Free body diagram of disc
From Figure 4, it can be seen that the frame will experience
forces: (i) horizontal direction
cos2em and (ii) vertical direction sin2em . The primary inertia
force can be balanced by a
counter mass bm at radius b such that b Bm b m r= .
Figure 5 A reciprocating machine with a counter balance mass
The component of inertia force bm along the line of stroke is
cos2bmb . But a force
sin2bmb is then introduced in a direction (perpendicular) to
line of stroke. In most practical
applications, the reciprocating mass is partially balanced by a
rotating mass bm , reducing the inertia
force in the line of stroke and direction, such that
bmrcm bB =
-
127
where c is the fraction of reciprocating mass to be balanced and
mB is the mass of the slider. The
unbalanced primary force along the line of action is given
by
)coscos( 22 bmrm bB = or coscos.22 rcmrm Bb
or cos)1( 2rmc B (9)
The unbalance force in the vertical direction
sin2bmb = sin2rcmB (10)
Resultant unbalance force at any instant
= 22222 sincos)1( ccrmB + (11)
If the revolving and reciprocating (primary force) masses to be
balanced simultaneously then,
rcmmrcmrmbm BABAb )( +=+= (12)
where Am is the mass of rotating components. The direction of
resultant force at any instant is given
as
tan
1cos)1(tan
2
2
c
c
rmc
rcm
B
B
=
= (13)
(a)
(b)
(c) Equivalent of Figure (c)
Figure 6 Frame reaction in the horizontal direction
Resultant R will be rotating in opposite direction to crank
(i.e. cw). For 1
2c = ; R is constant and
rotating with in cw direction. So primary force can be balanced
as shown in Figure 7.
-
128
Figure 7
Conditions of the balance in a multi cylinder engine:
c2 c1
c3 c4
m2m3 m4
m1
stroke
12
3
4
2
3
m4
m3
m2m1
Figure 8 Multi-cylinder in-line engine
In Figure 8 1 , 2 and 3 are 4 are angular positions of the multi
cylinder engine (Four engines in
Figure 8) and 2 , 3 and 4 are the phase difference of cranks 2,
3, 4 with respect to 1. The line of
stroke of each cylinder is assumed to in the horizontal plane
through the crankshaft axis. The inertia
force of reciprocating masses will be situated in same
horizontal plane. For each cylinder: r is the
crank radius, l is the connecting rod length, m is the total
reciprocating mass (the piston and the
connecting rod) and i is the angle between cranks, which depends
upon the firing order. Subscript i
represent the cylinder number (i = 1, 2, 3, 4).
Equilibrium of Primary forces:
Conditions for the complete equilibrium of primary forces
are:
1. The algebraic sum of primary forces is zero and
2. The algebraic sum of their moments with respect to any of the
transverse plane ( to
crankshaft) is equal to zero.
-
129
The resultant primary shaking force will be
nnnp rmrmrmrmF coscoscoscos2
32
3322
2212
11 ++++=
==
n
iiiirm
1
2 cos (14)
with ii += 1 ni = 3,2,1 (15)
where 1 is the variable and i are constants and 01 = .
Substituting (14) into (15), we get
( ) += iiip rmF 12 cos (16)
or ===
n
iiii
n
iiii rmrm
11
2
11
2 sinsincos.cos
or = =
n
i
n
iiiiiii rmrm
1 11
21
2 )sin(sin)cos(cos (17)
The primary force, pF , will be maximum, when 01
=
pF i.e.
=
cos
sintan
11
mr
mr (18)
For pF to be zero for all values of 1 , then from eqn. (17), we
get
0cos1
=
=
n
i
mr (19)
and
==
n
i
mr1
0sin (20)
Similarly, for moments, we can write
0cos1
=
=
n
i
mra (21)
and
0sin1
=
=
n
i
mra (22)
where a is the distance from the center line (line of stroke) of
any cylinder to an arbitrarily selected
reference plane ( to the crank shaft axis). Thus, for complete
balancing of primary forces and
moments, eqns. (19) to (22) should be satisfied.
-
130
Equilibrium of Secondary Forces: Conditions for complete
equilibrium of the secondary forces
are:
1. The algebraic sum of the secondary forces is zero and
2. The algebraic sum of their moments with respect of any
transverse plane is also zero.
Thus the resultant of secondary forces:
2
1
cos2n
s i i
i i
rF m r
i
=
with 1 i
i i
r
n l
=
(23)
or ( )2 11
cos2n
s i i i
i i
rF m r
l
= +
or 2 2
2 2
1 1cos2 cos2 sin 2 sin 2smr mr
Fl l
= (24)
(i) sF is maximum, when
1
0sF
=
which gives
2
1
1 2
sin 21tan
2cos2
mr
l
mr
l
=
(25)
(ii) For 0=sF i.e. criteria for the balancing of the secondary
force is (from eqn. 24)
= 02cos2
l
mr (26)
and
= 02sin2
l
mr (27)
(iii) For balancing of moments, we have:
= 02sin.2
al
mr (28)
and
= 02cos.2
al
mr (29)
-
131
Thus for complete secondary balancing eqns. (26)-(29) has to be
satisfied. Fundamental eqns. (19) to
(22) and eqns. (26) to (29) express completely the primary and
secondary balances for reciprocating
engine with n-cylinders arranged in a line on one side of the
crank shaft with the cylinder centre lies
all in the plane containing the crankshaft axis. Firing order
affects the balance of multi cylinder
engine: For example Two-stroke engine: One cycle of operation in
one revolution of crankshaft.
Interval between the crank= n/2 . Four- stroke engine: One cycle
of operation in two revolutions of
crankshaft. Interval between the crank= n/4 , where n is numbers
of cylinder in the multi-cylinder
engine.
(A) Crank arrangement for two-stroke engine:
(1) The crank arrangement can be so chosen to make the cylinder
firing not in a sequential order
but distribute this on either side of the crankshaft with
respect to its middle plane.
(2) Once crank arrangement is fixed there may be several choice
on firing order itself (see
specially four- stroke engine).
Cranks are rotating in the cw direction. Firing will start say
from engine 1. Next cylinder, which is
2/ in phase in ccw, will be ready for firing (because of
completion of compression stroke). Next
firing can be done in engine 4 then in 2 and finally in 3.
Hence, the firing order will be: 1-4-2-3.
Another version can be 1-3-2-4. For given crank arrangement (see
in Figure 9 for 4, 5 and 6 cylinders)
for two- stroke engine only unique firing order is possible i.e.
for 4 cylinder: 1-4-2-3, 5 cylinder: 1-5-
2-4-3 and 6 cylinder: 1-6-2-5-3-4.
1
2
3490
Firing order 1-4-2-3
1 2 3 4
(a) Four cylinder engine (interval=2
4 2
= )
-
132
1
5
24
372
1 2 3 4 5
Firing order 1-5-2-4-3
(b) Five cylinder engine: interval=2
725
o =
1 2 3 4 5 61
4
3
5
2
6
60
Firing order 1-6-2-5-3-4
(c) Six cylinder engine: interval=2
606
o =
Figure 9 Two-stroke engine
(B) Four stroke engine: For a given crank arrangement there may
be several firing order possible.
Refer to Figure 10. For 4- cylinder the firing order could be:
1-4-2-3 or 1-3-2-4; for 5-cylinder the
firing order could be: 1-5-3-4-2 (only one) and for 6- cylinder
the firing order could be: 1-6-2-5-3-4,
1-6-4-5-3-4 or 1-3-4-5-6-2.
1 2
4 3
1 2 3 4
Firing order 1-4-2-3
(a) Four cylinder engine: internal 4
4
= =
-
133
1
4
32
3
1 2 3 4 5
Firing order 1-5-2-4-3
(b) Five cylinder: interval 4
1445
= =
4
53
2
144
1-0
5-144
2-288
4-432 72
3-576 216
1 5
63
4
2
Firing order 1-6-2-5-3-4
1 2 3 4 5 6
(c) Six cylinder: interval4
1206
= =
Figure 10 Four-stroke engine
Balancing of Radial Engines (Direct and reverse crank
method)
B
A
O2
Figure 11(a) Slider-crack mechanism
A
A
O
Direct crank
Reverse crank
Fig. 1(a)
Figure 11(b) Primary direct and reverse crank
Reverse crank OA is an image of direct crank OA. Direct crank
and reverse crank rotates in opposite
direction. Let rm is the reciprocating mass at B, then primary
force will be cos2rmr . This is
2
rm
2
rm
-
134
equivalent to the component of the centrifugal force produced by
mass rm at A. Let total
reciprocating mass rm is divided into two parts i.e. 2/rm for
each in the direct crank and in the
reverse crank as shown in Fig. 11(a). The centrifugal force
acting on primary direct and reverse crank
is 2
2
rm r . Total component in the direction of line of stroke 22
cos2
rm r =
2 cosrm r = . The
component in vertical direction cancel each other i.e. 2
sin2
rm r .
The secondary force is ( )22 cos24
r
rm
n
, where rm is replaced by the mass of 2/rm each
placed at c and c as shown in Figure 11(c) with 4r
oc ocn
= = =
crank radius of secondary crank.
Secondary crank oc rotates at 2 rad/sec . Secondary crank co
rotates at 2 rad/sec .
c
o
2
2
reversecrank
c
directcrank
Figure 11(b) Secondary direct & reverse crank
Three cylinders radial engine: Line of stroke is 120. All three
lines of stroke are in one plane.
Shaking forces from reciprocating parts of each cylinder will be
acting along the line of strokes in a
single plane. Let rm be the mass of reciprocating part of each
cylinder.
Cylinder no. Direction of rotation Crank angle Direction of
rotation Crank angle
1 ccw 0 cw 0
2 ccw 240 cw 120
3 ccw 120 cw 240
Primary unbalance: mass3
2
rm= ; crank radius = r; speed= cw; 232
rp
mF r= . It can be balanced
by a balancing mass bm at radius b i.e. 2
3 rb
mbm = and placed at opposite to the crank.
-
135
1
Line of stroke
connecting rod
for cylinder 1
connecting rod for cylinder 3
connectingrod forcylinder2
120
120120
32lineofstroke
Figure 12(a) Three cylinders radial engine
1,2,3 1
3 2
Direct primarycranks
Reverse primarycranks
Figure 12(b)
1
3 2
1,2,3
Direct Secodary cranks(Balanced by itself)
Reverse secondarycranks
22
Figure 12(c)
Secondary unbalance:mass2
3 rm= , radius n
r
4= ,
r
ln = and speed 2 ccw= + . Hence,
( )23 22 4
rs
m rF
n =
; by gear train we have to obtain secondary balancing.
rm
rm rm
2
rm
2
rm
23 r
m
2
rm
2
rm
23 r
m
2
rm
2
rm
-
136
Tutorial Problems:
(1) A single cylinder horizontal oil engine has a crank 190.5 mm
long and a connecting rod 838.2 mm
long. The revolving parts are equivalent to 489.3 N at crank
radius and the piston and gudgeon pin
weigh 400.32 N. The connecting rod weighs 511.52 N and its
center of gravity is 266.7 mm from the
crank pin centre. Revolving balance weights are introduced at a
radius of 215.9 mm on extensions of
the crank webs in order to balance all the revolving parts and
one-half of the reciprocating parts. Find
the magnitude of the total balance weight and neglecting the
obliquity of the connecting rod.
( ) . . / 0i e l r , the nature and magnitude of the residual
unbalanced force on the engine. RPM=300 cw.
(Answer: 987.456 N, 5390.976 N and revolving at 300 rpm
ccw).
(2) A four cylinder Marin oil engine has the cranks arranged at
angular interval of 90. The inner
cranks are 1.22 m apart and are placed symmetrically between the
out cranks, which are 3.05 m apart.
Each crank is 457.2 mm long, the engine runs at 90 rpm; and the
weight of the reciprocating parts for
each cylinder is 8006.4 N. In which order should the cranks be
arranged for the best balance of the
reciprocating masses, and what will then be the magnitude of the
unbalanced primary couple?
(Answer: 1,4,2,3;42.82 kN-m)
(3) In a three-cylinder radial engine all three connecting rods
act on a single crank. The cylinder
center lines are set at 120 , the weight of the reciprocating
parts per line is 22.24 N, the crank length
is 76.2 mm, the connecting rod length is 279.4 mm and the rpm
are 1800 cw. Determine with regard
to the inertia of the reciprocating parts (a) the balance weight
to be fitted at 101.6 mm radius to give
primary balance (b) the nature and magnitude of the secondary
unbalanced force (c) whether the
fourth and sixth order forces are balanced or unbalanced.
(Answer: (a) 25 N (b) Constant magnitude
2508.67 N, 3600 rpm ccw (c) th4 harmonic is unbalanced, th6
harmonic is balanced).
Primary Balance of Multi-cylinder In-line Engines:
The conditions in order to give primary balance of the
reciprocating masses are:
= 0cos. 2 rmrec (i.e. Algebraic sum of primary forces shall be
zero) and
= 0cos. 2. ramrec (i.e. Algebraic sum of the (primary force)
couple about any point in the plane of force shall also be
zero).
where a is the distance of the plane of rotation of the crank
from a parallel reference plane. Above
two equations should satisfy for the angular position of the
crankshaft relative to the dead center
(reference line). The primary force due to the reciprocating
mass is identical with the component
parallel to the line of stroke of the centrifugal force produced
by an equal mass attached to and
-
137
revolving with the crank pin. Let the reciprocating masses are
attached to crank pin at A, B, C and D
are revolving with crank as shown in Figure 13(a). The force
polygon (centrifugal forces) may be
drawn. (i.e. oa, ab, bc and cd). Primary forces of the
individual cylinder are equal to the component of
oa, ab, bc and cd along the line of stroke (say PQ). Now ef, fg
,gh and he are primary forces and since
algebraic sum of these are equal to zero (for this
configuration), the engine is balanced for this
configuration. But suppose cranks turns clockwise through an
angle , then the effect will be same as
crank shaft is fixed and line of stroke is rotating ccw by
angle. Let us say SP is now new line of
stroke. Now 1, , and kl lm mn nk are primary forces and these
algebraic sum is not zero, but it is equal
to 1kk (primary force is not balanced). The primary force will
be only balanced when 1k coincides
with k or point d with o in force polygon. i.e. the centrifugal
force polygon is a closed one.
A B
CD
O
Four cylinder engineOA,OB,OC,OD are four cranks
Figure 13(a) Four cylinder engine
b
a
oS
lm k k
1 np
e
h
fc
d
Qtoline ofstroke
Force polygon of the centrifugalforces produced when
revolvingmasses respectively equal toreciprocating masses at crank
pin
Figure 13(b) Force polygon
In similar way the primary couple can only be balanced if the
couple polygon for the corresponding
centrifugal forces is closed. Hence, if a system of
reciprocating masses is to be primary balance, the
system of revolving masses, which is obtained by substituting an
equal revolving mass at the crank
pin for each reciprocating mass, must be balanced. The problem
of the primary balance of
reciprocating masses may therefore be solved by using the method
for revolving masses.
Secondary Balance of Multi-cylinder In-line Engine: The
conditions for the complete secondary
balance of an engine are
( )22 cos2 04
rec
rm
n =
and
-
138
( )22 cos2 04
rec
rm a
n =
for all angular positions of the crank shaft relative to the
line of stroke. As for the primary balance,
these conditions can only be satisfied if the force and couple
polygons are closed for the
corresponding system of revolving masses. If to each imaginary
secondary crank (angular
velocity= 2 and crank length ( )/ 4r n ) a revolving mass is
attached, equal to the corresponding
reciprocating mass, then the system thus obtained must be
completely balanced.
Example 1: A shaft carries four masses in parallel planes A, B,
C and D in this order, along it. The
masses at B and C are 18 kg and 12.5 kg, respectively, and each
has an eccentricity of 6 cm. The
masses at A and D have an eccentricity of 8 cm. The angle
between the masses at B and C is 1000,
and that between the masses at B and A is 1900 (both angles
measured in the same direction). The
axial distance between the planes A and B is 10 cm. And between
B and C is 20 cm. If the shaft is in
complete dynamic balance, determine (i) the masses at and D (ii)
the distance between the planes C
and D, and (iii) the angular position of the mass at D.
Solution:
B (Reference)
ld 1000
D
10cm 20cm CDl 1900 0
A B C D
A Figure 14 Multi-cylinder engine
Given data are: 18 6 ; 12.5 6 ; 8 B B C C A Dm kg r cm m kg r cm
r r cm= = = = = =
Aim is to obtain: ? ?; ? ? (with respect to B)A D CD Dm m l = =
= =
Condition of dynamics balancing are
cos 0; sin 0; cos 0; sin 0mr mr mrl mrl = = = =
Taking reference as the crank B for the phase measurement (i.e.
B = 0) and for the moment the
cylinder A as reference and are as follows
-
139
cos cos 0; sin sin 0
cos cos cos 0; sin sin sin 0
B B B C C C C d d d C C C C d d d d
A A A B B C C C d d d A A A C C C d d d
m r l m r l m r m r l m r l
m r m r m r m r n m r m r m r
+ + = + =
+ + + = + + =
Hence,
1080 390.7 8 cos 0; 2215.82 8 sin 0
7.88 108 13 8 cos 0; 1.39 73.86 8 sin 0
d d d d d d
A d d A d d
m l m l
m m m m
+ = + =
+ + = + + =
or 8 cos 689.3 (1)
8 sin 2215.82
d d d
d d d
m l
m l
=
= (2)
7.88 8 cos 95 (3)
1.39 8 sin 73.86 (4)
A d d
A d d
m m
m m
+ =
+ =
Equations (1) and (2) will give tan 3.2146d = 252.72 so in third
quadrant.d = So that
90=ddlm (5)
Equations (3) and (4) gives
7.88 2.3763 95; 1.39 7.639 73.86
9.67 kg; 7.91 kg; 36.66 cm; 6.66 cm
A d A d
A d d cd
m m m m
m m l l
= =
= = = =
Using Tabular method calculation are much easier. Take moments
about plane A and plane D with
phase reference as crank B. Choosing plane D as first reference
as advantage that mD and D will not
appear in two moment equation and mA and lCD can be calculated
from this two equation directly. So
choice of reference plane should be such that maximum number of
unknown can be eliminated (at
least two). Second reference plane can be chosen as A to
eliminate mA from equation.
Example 2: By direct and reverse cranks method, consider the
W-engine in which there are three
rows of cylinders. An engine of this type has four cylinders in
each row and the crankshaft is of the
normal flat type with one connecting rod from each row coupled
directly to each crankpin. The
middle row of cylinders is vertical and the other two rows are
inclined at 600 to the vertical. The
weight of the reciprocating parts is 26.69 N per cylinder; the
cranks are 7.6 cm long. The connecting
-
140
rods 27.9 cm long and the rpm 2000 cw. Find the maximum and
minimum values of the secondary
disturbing force on the engine (Figure 15).
Figure-15 W-engine Solution:
26.69 N; 7.6 cm; 3.67; 2.72 kg; 27.9 cm; 2000 rpm 209.43
rad/secrec recl
w r n m l cr
= = = = = = = =
2
1 3
600 600
Figure-16 W-engine
Secondary cracks
2
(m/2) 2 (m/2)
600 600
(a) Direct (b) reverse
2 2 (m/2) (m/2) Resultant Unbalance
mmm
=
+ 5.02
22
424
)2(2
22 r
m
n
r
m=
+
n
m
n
rm
22
4)2( =
m/2
2 2
-
141
Total 4 rows: 2
4 9882.2 Nm r
n= Total 4 rows:
2
2 4941.1 Nm r
n=
(i). At present position Resultant is minimum:
2
2
Minimum unbalance 24941.1 N (2 )2 4
m r
n
= = +
;
0 0 0
2 2 2 20, 90 ; 180 , 270 = = = =
(ii). For 0 0 0 0 02 1 345 (or 60 45 or 300 45 ) = = + = + the
resultant is maximum.
2
m
m/2
2
maximum unbalance 23
(2 ) 14823.3 N2 4
m r
n= =
0 0 0 0
4 4 4 445 , 135 ; 225 , 315 = = = =
Exercise Problems:
1. A four-cylinder marine oil engine has the cranks arranged at
angular intervals of 900. The inner
crank are 1.2 m apart and are placed symmetrically between the
outer cranks, which are 3.0m apart.
Each crank is 45.7 cm long, the engine runs at 90 rpm, and the
weight of the reciprocating parts for
each cylinder is 8006 N. In which order should the cranks be
arranged for the best balance of the
reciprocating masses, and what will then be the magnitude of the
unbalanced primary couple?
2. The reciprocating masses for three cylinders of a four-crank
engine weight 3047, 5078 and 8125
kgs and the centerlines of the se cylinders are 3.66 m, 2.59 m.
and 1.07 m. respectively from that of
the fourth cylinder. Find the fourth reciprocating mass and the
angles between the cranks so that they
may be mutually balanced for primary forces and couples. If the
cranks are each 0.61 m long, the
connecting distributing rods 2.75 m long and the rpm 60, find
the maximum value of the secondary
distributing force and crank positions at which it occurs.
------------------------*********************--------------------------